
บทที่ 2 แนวคิด ทฤษฎี ...€¦ · บทที่ 2...
46
บทที่ 2 แนวคิด ทฤษฎีและวรรณกรรมที่เกี่ยวข้อง สาหรับการวิจัยนี้ ผู้วิจัยได้ศึกษางานวิจัยและเอกสารที่เกี่ยวข้อง ตลอดจนรวบรวม แนวคิดทฤษฏีจากเอกสาร และงานวิจัยต่างๆ ที่เกี่ยวข้องเพื่อนามาเป็นข้อมูลประกอบในการ ดาเนินการวิจัยให้มีความสมบูรณ์ และมีประสิทธิภาพยิ่งขี้น โดยแบ่งออกเป็น 4 ส่วน คือ 1. ระบบแจ้งเตือนภัยทางอากาศของศูนย์ต่อสู้ป้องกันภัยทางอากาศกองทัพบก 2. หลักการเกี่ยวกับโครงการพัฒนาระบบแจ้งเตือนภัยทางอากาศ 3. โปรแกรมที่ใช้ในการพัฒนาระบบ 4. งานวิจัยที่เกี่ยวข้อง 1. ระบบแจ้งเตือนภัยทางอากาศ ศูนย์ต่อสู้ป้องกันภัยทางอากาศกองทัพบก ได้ให้ความหมายในระบบแจ้งเตือนภัยทางอากาศ ดังนี้ (ศปภอ.ทบ. 2543 : 1-6) 1.1 ความเป็นมาของศูนย์ต่อสู้ป้องกันภัยทางอากาศกองทัพบก ศูนย์ต่อสู้ป้องกันภัยทางอากาศกองทัพบก (ศปภอ.ทบ.) ก่อตั้งเมื่อปี 2533 ซึ ่ง เป็นหน่วยงานขึ้นตรงของ หน่วยบัญชาการป้องกันภัยทางอากาศกองทัพบก (นปอ.) มีภารกิจ เกี่ยวกับระบบการควบคุมและแจ้งเตือนภัยทางอากาศของกองทัพบก ศปภอ .ทบ. จะปฏิบัติงาน ร่วมกับหน่วย , เหล่าทัพ และส่วนราชการอื่นๆ ในระบบป้องกันภัยทางอากาศ เพื่อที่จะรับ - ส่ง ข่าวสาร ในการป้องกันภัยทางอากาศ ระหว่างเหล่าทัพอื่นๆ ไปยังหน่วยดาเนินกลยุทธ์ และ ส่วนราชการในพื้นที่ ดังนั้น ความรวดเร็ว ความต่อเนื่อง และทันสมัย ของข้อมูลข่าวสารนั้นเป็นสิ่งที่ สาคัญอย่างยิ่ง ทั้งนี้ก็เพื่อให้หน่วยที่ได้รับข้อมูลข่าวสาร สามารถนาไปใช้ได้ทันต่อเหตุการณ์ 1.2. ภารกิจและพันธกิจของหน่วยในระบบควบคุมและแจ้งเตือน ก. ภารกิจของ ศปภอ.ทบ. (Mission) (1) บังคับบัญชา วางแผน ประสานงาน ควบคุม และกากับดูแล หน่วยใน ระบบควบคุมและแจ้งเตือน เกี่ยวกับการต่อสู้ป้องกันภัยทางอากาศของกองทัพบก (2) เฝ้าติดตามการเคลื่อนไหวของอากาศยานในเขตประเทศไทย และประเทศ ข้างเคียงอย่างต่อเนื่องตลอดเวลา (3) แจ้งเตือนการเคลื่อนไหวของอากาศยาน ในเขตประเทศไทย และประเทศ
Transcript of บทที่ 2 แนวคิด ทฤษฎี ...€¦ · บทที่ 2...
บทท 2
แนวคด ทฤษฎและวรรณกรรมทเกยวของ ส าหรบการวจยน ผวจยไดศกษางานวจยและเอกสารทเกยวของ ตลอดจนรวบรวมแนวคดทฤษฏจากเอกสาร และงานวจยตางๆ ทเกยวของเพอน ามาเปนขอมลประกอบในการด าเนนการวจยใหมความสมบรณ และมประสทธภาพยงขน โดยแบงออกเปน 4 สวน คอ
1. ระบบแจงเตอนภยทางอากาศของศนยตอสปองกนภยทางอากาศกองทพบก 2. หลกการเกยวกบโครงการพฒนาระบบแจงเตอนภยทางอากาศ 3. โปรแกรมทใชในการพฒนาระบบ 4. งานวจยทเกยวของ
1. ระบบแจงเตอนภยทางอากาศ ศนยตอสปองกนภยทางอากาศกองทพบก ไดใหความหมายในระบบแจงเตอนภยทางอากาศ ดงน (ศปภอ.ทบ. 2543 : 1-6)
1.1 ความเปนมาของศนยตอสปองกนภยทางอากาศกองทพบก ศนยตอสปองกนภยทางอากาศกองทพบก (ศปภอ.ทบ.) กอตงเมอป 2533 ซง เปนหนวยงานขนตรงของ หนวยบญชาการปองกนภยทางอากาศกองทพบก (นปอ.) มภารกจเกยวกบระบบการควบคมและแจงเตอนภยทางอากาศของกองทพบก ศปภอ .ทบ. จะปฏบตงานรวมกบหนวย , เหลาทพ และสวนราชการอนๆ ในระบบปองกนภยทางอากาศ เพอทจะรบ - สง ขาวสาร ในการปองกนภยทางอากาศ ระหวางเหลาทพอนๆ ไปยงหนวยด าเนนกลยทธ และ สวนราชการในพนท ดงนน ความรวดเรว ความตอเนอง และทนสมย ของขอมลขาวสารนนเปนสงทส าคญอยางยง ทงนกเพอใหหนวยทไดรบขอมลขาวสาร สามารถน าไปใชไดทนตอเหตการณ 1.2. ภารกจและพนธกจของหนวยในระบบควบคมและแจงเตอน ก. ภารกจของ ศปภอ.ทบ. (Mission)
(1) บงคบบญชา วางแผน ประสานงาน ควบคม และก ากบดแล หนวยใน ระบบควบคมและแจงเตอน เกยวกบการตอสปองกนภยทางอากาศของกองทพบก
(2) เฝาตดตามการเคลอนไหวของอากาศยานในเขตประเทศไทย และประเทศ ขางเคยงอยางตอเนองตลอดเวลา
(3) แจงเตอนการเคลอนไหวของอากาศยาน ในเขตประเทศไทย และประเทศ
11
ขางเคยงแก ศนยตอสปองกนภยทางอากาศกองทพบกประจ าพนทอยางตอเนองตลอดเวลา
(4) ควบคมการใชอาวธตอสอากาศยานในพนทสวนหลง ข. ภารกจของ ศปภอ.ทบ.ประจ าพนท
(1) ควบคม บงคบบญชา ก ากบดแล การตอสปองกนภยทางอากาศของหนวย ทหารปนใหญตอสอากาศยาน และหนวยตางๆ ทไดรบการสมทบ หรอขนการควบคมทางยทธการ
(2) เฝาตดตามการเคลอนไหวของอากาศยาน ในพนทรบผดชอบอยางตอเนอง
(3) แจงเตอนการเคลอนไหวของอากาศยานใหกบหนวยตางๆ ในพนทรบผดชอบ อยางตอเนอง
(4) วางแผน และประสานการใชอาวธตอสอากาศยานในพนทสวนหลงท รบผดชอบ ค. พนธกจของหนวยในระบบควบคมและแจงเตอน (Functions) ขนตอนของการปฏบตงานในการปองกนภยทางอากาศ ของหนวยในระบบควบคมและแจง-เตอนจะปฏบตตามพนธกจ 4 ประการคอ คนหา - พสจนฝาย - แจงเตอน - ควบคมการใชอาวธ (1) การคนหา (Detect) หนวยในระบบควบคมและแจงเตอน จะด ารงการปฏบตการตามภารกจ คอการคนหา เฝาตรวจ และตดตามการเคลอนไหวของอากาศยานในพนทรบผดชอบ ในเขตประเทศไทย และประเทศขางเคยง การด าเนนการคนหาน มกไดมาจากการตรวจการณดวยเรดาร หรอการตรวจการณดวยสายตา 1.1) การตรวจการณดวยเรดาร จะไดรบขาวสารจากเรดารในอตราของหนวย หรอจากเรดารของ ทอ. ซงสงขอมลอากาศยานทตรวจจบไดผานทางระบบ JADDIN มายง ศปภอ.ทบ. หรอ ศปภอ.ทบ.ประจ าพนท หรอจากเรดารเตอนภยระดบต า (LAADS) ของ ศปภอ.พน.ปตอ. ซง ศปภอ.พน.ปตอ.จะรายงานการตรวจพบอากาศยานผานมาทาง VOICE (ทางวทย) ไปยง ศปภอ.ทบ.ประจ าพนท และ ศปภอ.ทบ.ประจ าพนทจะรายงานมายง ศปภอ.ทบ. 1.2) การตรวจการณดวยสายตา จะเปนการคนหาดวยยามอากาศของหนวยเพอเสรมการตรวจการณดวยระบบเรดาร , หรออาจเปนการรายงานของยามอากาศของหนวยด าเนนกลยทธ , หรอของสวนราชการพลเรอน หรอของ ศปภอ.พน.ปตอ. มกเปนการรายงานทาง VOICE (ทางวทย) ซงกจะรายงานมายง ศปภอ.ทบ.ประจ าพนท
12
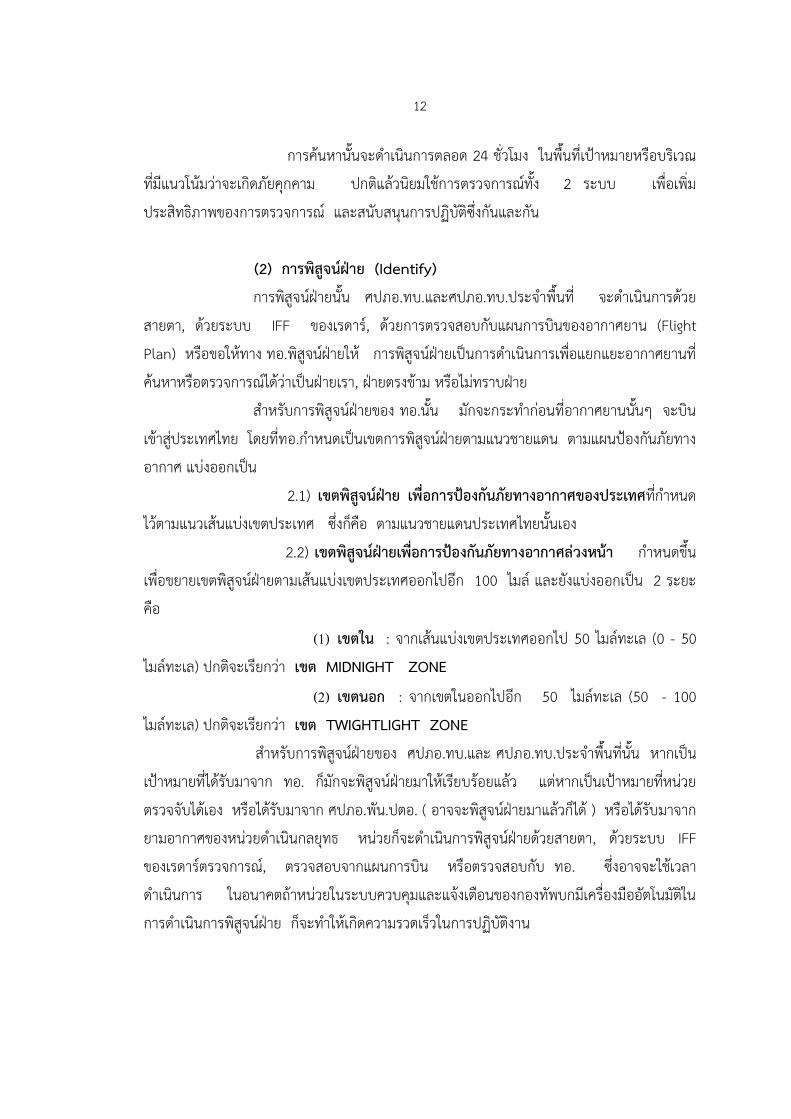
การคนหานนจะด าเนนการตลอด 24 ชวโมง ในพนทเปาหมายหรอบรเวณทมแนวโนมวาจะเกดภยคกคาม ปกตแลวนยมใชการตรวจการณทง 2 ระบบ เพอเพมประสทธภาพของการตรวจการณ และสนบสนนการปฏบตซงกนและกน (2) การพสจนฝาย (Identify) การพสจนฝายนน ศปภอ.ทบ.และศปภอ.ทบ.ประจ าพนท จะด าเนนการดวยสายตา, ดวยระบบ IFF ของเรดาร, ดวยการตรวจสอบกบแผนการบนของอากาศยาน (Flight Plan) หรอขอใหทาง ทอ.พสจนฝายให การพสจนฝายเปนการด าเนนการเพอแยกแยะอากาศยานทคนหาหรอตรวจการณไดวาเปนฝายเรา, ฝายตรงขาม หรอไมทราบฝาย ส าหรบการพสจนฝายของ ทอ.นน มกจะกระท ากอนทอากาศยานนนๆ จะบนเขาสประเทศไทย โดยททอ.ก าหนดเปนเขตการพสจนฝายตามแนวชายแดน ตามแผนปองกนภยทางอากาศ แบงออกเปน 2.1) เขตพสจนฝาย เพอการปองกนภยทางอากาศของประเทศทก าหนดไวตามแนวเสนแบงเขตประเทศ ซงกคอ ตามแนวชายแดนประเทศไทยนนเอง 2.2) เขตพสจนฝายเพอการปองกนภยทางอากาศลวงหนา ก าหนดขนเพอขยายเขตพสจนฝายตามเสนแบงเขตประเทศออกไปอก 100 ไมล และยงแบงออกเปน 2 ระยะ คอ
(1) เขตใน : จากเสนแบงเขตประเทศออกไป 50 ไมลทะเล (0 - 50 ไมลทะเล) ปกตจะเรยกวา เขต MIDNIGHT ZONE
(2) เขตนอก : จากเขตในออกไปอก 50 ไมลทะเล (50 - 100 ไมลทะเล) ปกตจะเรยกวา เขต TWIGHTLIGHT ZONE ส าหรบการพสจนฝายของ ศปภอ.ทบ.และ ศปภอ.ทบ.ประจ าพนทนน หากเปนเปาหมายทไดรบมาจาก ทอ. กมกจะพสจนฝายมาใหเรยบรอยแลว แตหากเปนเปาหมายทหนวยตรวจจบไดเอง หรอไดรบมาจาก ศปภอ.พน.ปตอ. ( อาจจะพสจนฝายมาแลวกได ) หรอไดรบมาจากยามอากาศของหนวยด าเนนกลยทธ หนวยกจะด าเนนการพสจนฝายดวยสายตา, ดวยระบบ IFF ของเรดารตรวจการณ, ตรวจสอบจากแผนการบน หรอตรวจสอบกบ ทอ. ซงอาจจะใชเวลาด าเนนการ ในอนาคตถาหนวยในระบบควบคมและแจงเตอนของกองทพบกมเครองมออตโนมตในการด าเนนการพสจนฝาย กจะท าใหเกดความรวดเรวในการปฏบตงาน
13
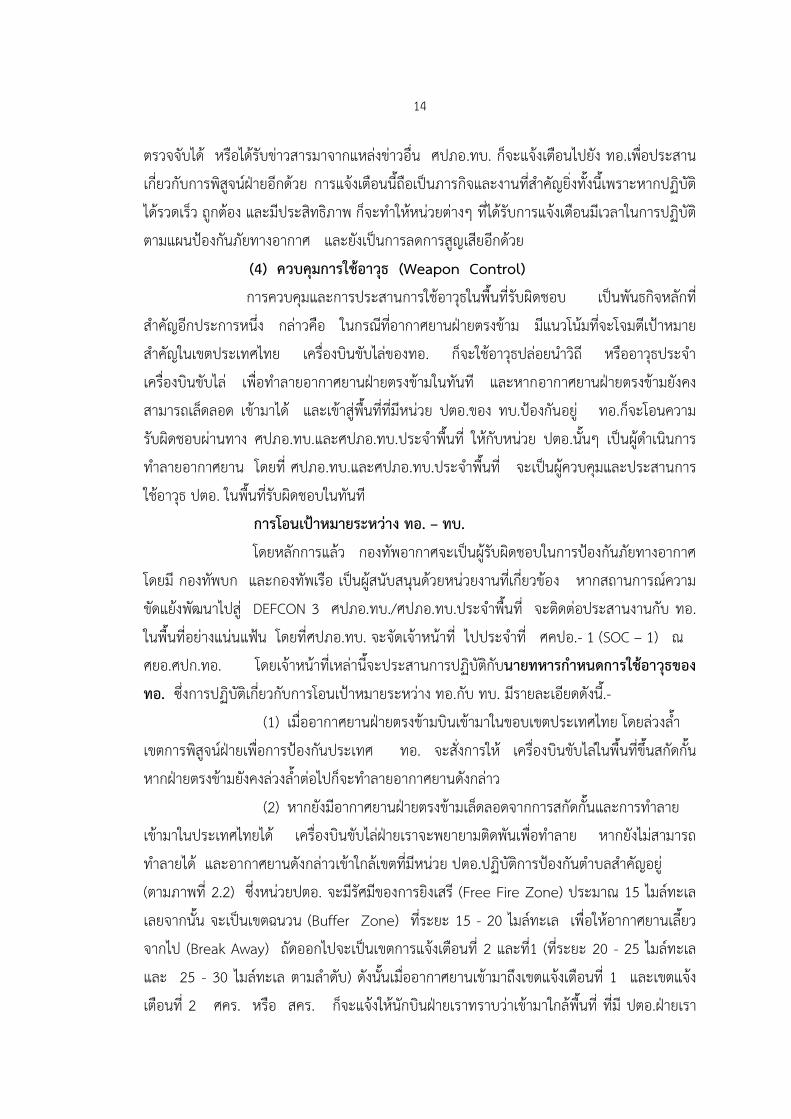
รปท 2.1 เขตพสจนฝายเพอการปองกนประเทศ (3) การแจงเตอน (Warning) โดยปกตแลวเมอไดรบขาวสารเกยวกบอากาศยาน ทลวงล าเขตประเทศไทย เขามา และพสจนฝายแลว ทอ.จะแจงเตอนผานมายง ศปภอ.ทบ. และ ศปภอ.ทบ.ประจ าพนท เพอจะไดเตรยมการ ในขณะเดยวกน ทอ. จะสงการให เครองบนขบไล ด าเนนการสกดกนอากาศยานฝายตรงขามทลวงล า ซง ศปภอ.ทบ.และศปภอ.ทบ.ประจ าพนท กจะแจงเตอนไปยง ศปภอ.พน.ปตอ., หนวยด าเนนกลยทธ และสวนราชการตางๆ ในพนทรบผดชอบ เพอเตรยมการปฏบตตามแผนปองกนภยทางอากาศ และหากเปนอากาศยานท ศปภอ.ทบ. หรอศปภอ.ทบ.ประจ าพนท
เขตนอก 50 – 100 ไมลทะเล
เขตใน 0 – 50 ไมลทะเล
เขตพสจนฝาย ปภอ. ของประเทศ
เขตนอก เขตใน เขตพสจนฝาย ปภอ. ของประเทศ
14
ตรวจจบได หรอไดรบขาวสารมาจากแหลงขาวอน ศปภอ.ทบ. กจะแจงเตอนไปยง ทอ.เพอประสานเกยวกบการพสจนฝายอกดวย การแจงเตอนนถอเปนภารกจและงานทส าคญยงทงนเพราะหากปฏบตไดรวดเรว ถกตอง และมประสทธภาพ กจะท าใหหนวยตางๆ ทไดรบการแจงเตอนมเวลาในการปฏบตตามแผนปองกนภยทางอากาศ และยงเปนการลดการสญเสยอกดวย (4) ควบคมการใชอาวธ (Weapon Control) การควบคมและการประสานการใชอาวธในพนทรบผดชอบ เปนพนธกจหลกทส าคญอกประการหนง กลาวคอ ในกรณทอากาศยานฝายตรงขาม มแนวโนมทจะโจมตเปาหมายส าคญในเขตประเทศไทย เครองบนขบไลของทอ. กจะใชอาวธปลอยน าวถ หรออาวธประจ า เครองบนขบไล เพอท าลายอากาศยานฝายตรงขามในทนท และหากอากาศยานฝายตรงขามยงคงสามารถเลดลอด เขามาได และเขาสพนททมหนวย ปตอ.ของ ทบ.ปองกนอย ทอ.กจะโอนความรบผดชอบผานทาง ศปภอ.ทบ.และศปภอ.ทบ.ประจ าพนท ใหกบหนวย ปตอ.นนๆ เปนผด าเนนการท าลายอากาศยาน โดยท ศปภอ.ทบ.และศปภอ.ทบ.ประจ าพนท จะเปนผควบคมและประสานการใชอาวธ ปตอ. ในพนทรบผดชอบในทนท การโอนเปาหมายระหวาง ทอ. – ทบ. โดยหลกการแลว กองทพอากาศจะเปนผรบผดชอบในการปองกนภยทางอากาศโดยม กองทพบก และกองทพเรอ เปนผสนบสนนดวยหนวยงานทเกยวของ หากสถานการณความขดแยงพฒนาไปส DEFCON 3 ศปภอ.ทบ./ศปภอ.ทบ.ประจ าพนท จะตดตอประสานงานกบ ทอ.ในพนทอยางแนนแฟน โดยทศปภอ.ทบ. จะจดเจาหนาท ไปประจ าท ศคปอ.- 1 (SOC – 1) ณ ศยอ.ศปก.ทอ. โดยเจาหนาทเหลานจะประสานการปฏบตกบนายทหารก าหนดการใชอาวธของ ทอ. ซงการปฏบตเกยวกบการโอนเปาหมายระหวาง ทอ.กบ ทบ. มรายละเอยดดงน.-
(1) เมออากาศยานฝายตรงขามบนเขามาในขอบเขตประเทศไทย โดยลวงล า เขตการพสจนฝายเพอการปองกนประเทศ ทอ. จะสงการให เครองบนขบไลในพนทขนสกดกน หากฝายตรงขามยงคงลวงล าตอไปกจะท าลายอากาศยานดงกลาว
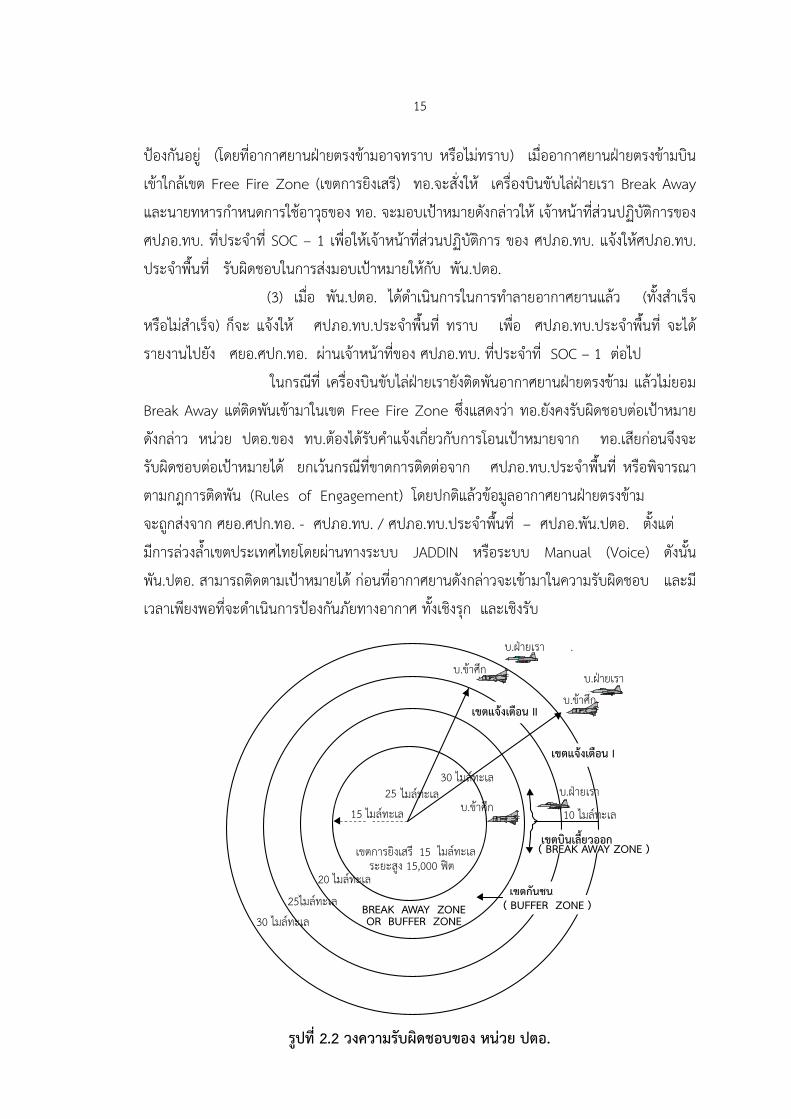
(2) หากยงมอากาศยานฝายตรงขามเลดลอดจากการสกดกนและการท าลาย เขามาในประเทศไทยได เครองบนขบไลฝายเราจะพยายามตดพนเพอท าลาย หากยงไมสามารถท าลายได และอากาศยานดงกลาวเขาใกลเขตทมหนวย ปตอ.ปฏบตการปองกนต าบลส าคญอย (ตามภาพท 2.2) ซงหนวยปตอ. จะมรศมของการยงเสร (Free Fire Zone) ประมาณ 15 ไมลทะเล เลยจากนน จะเปนเขตฉนวน (Buffer Zone) ทระยะ 15 - 20 ไมลทะเล เพอใหอากาศยานเลยวจากไป (Break Away) ถดออกไปจะเปนเขตการแจงเตอนท 2 และท1 (ทระยะ 20 - 25 ไมลทะเล และ 25 - 30 ไมลทะเล ตามล าดบ) ดงนนเมออากาศยานเขามาถงเขตแจงเตอนท 1 และเขตแจงเตอนท 2 ศคร. หรอ สคร. กจะแจงใหนกบนฝายเราทราบวาเขามาใกลพนท ทม ปตอ.ฝายเรา
15
ปองกนอย (โดยทอากาศยานฝายตรงขามอาจทราบ หรอไมทราบ) เมออากาศยานฝายตรงขามบนเขาใกลเขต Free Fire Zone (เขตการยงเสร) ทอ.จะสงให เครองบนขบไลฝายเรา Break Away และนายทหารก าหนดการใชอาวธของ ทอ. จะมอบเปาหมายดงกลาวให เจาหนาทสวนปฏบตการของ ศปภอ.ทบ. ทประจ าท SOC – 1 เพอใหเจาหนาทสวนปฏบตการ ของ ศปภอ.ทบ. แจงใหศปภอ.ทบ.ประจ าพนท รบผดชอบในการสงมอบเปาหมายใหกบ พน.ปตอ. (3) เมอ พน.ปตอ. ไดด าเนนการในการท าลายอากาศยานแลว (ทงส าเรจ หรอไมส าเรจ) กจะ แจงให ศปภอ.ทบ.ประจ าพนท ทราบ เพอ ศปภอ.ทบ.ประจ าพนท จะไดรายงานไปยง ศยอ.ศปก.ทอ. ผานเจาหนาทของ ศปภอ.ทบ. ทประจ าท SOC – 1 ตอไป ในกรณท เครองบนขบไลฝายเรายงตดพนอากาศยานฝายตรงขาม แลวไมยอม Break Away แตตดพนเขามาในเขต Free Fire Zone ซงแสดงวา ทอ.ยงคงรบผดชอบตอเปาหมายดงกลาว หนวย ปตอ.ของ ทบ.ตองไดรบค าแจงเกยวกบการโอนเปาหมายจาก ทอ.เสยกอนจงจะรบผดชอบตอเปาหมายได ยกเวนกรณทขาดการตดตอจาก ศปภอ.ทบ.ประจ าพนท หรอพจารณาตามกฎการตดพน (Rules of Engagement) โดยปกตแลวขอมลอากาศยานฝายตรงขาม จะถกสงจาก ศยอ.ศปก.ทอ. - ศปภอ.ทบ. / ศปภอ.ทบ.ประจ าพนท – ศปภอ.พน.ปตอ. ตงแต มการลวงล าเขตประเทศไทยโดยผานทางระบบ JADDIN หรอระบบ Manual (Voice) ดงนน พน.ปตอ. สามารถตดตามเปาหมายได กอนทอากาศยานดงกลาวจะเขามาในความรบผดชอบ และมเวลาเพยงพอทจะด าเนนการปองกนภยทางอากาศ ทงเชงรก และเชงรบ
บ.ฝายเรา
เขตการยงเสร รศม
15 ไมลทะเล ระยะสง 15,000 ฟต
25ไมลทะเล
30 ไมลทะเล
เขตแจงเตอน II
25 ไมลทะเล 10 ไมลทะเล
30 ไมลทะเล
20 ไมลทะเล
15 ไมลทะเล บ.ฝายเรา
บ.ฝายเรา .
เขตกนชน ( BUFFER ZONE ) BREAK AWAY ZONE
OR BUFFER ZONE
เขตบนเลยวออก ( BREAK AWAY ZONE )
บ.ขาศก
. บ.ขาศก
บ.ขาศก
เขตแจงเตอน I
รปท 2.2 วงความรบผดชอบของ หนวย ปตอ.
16
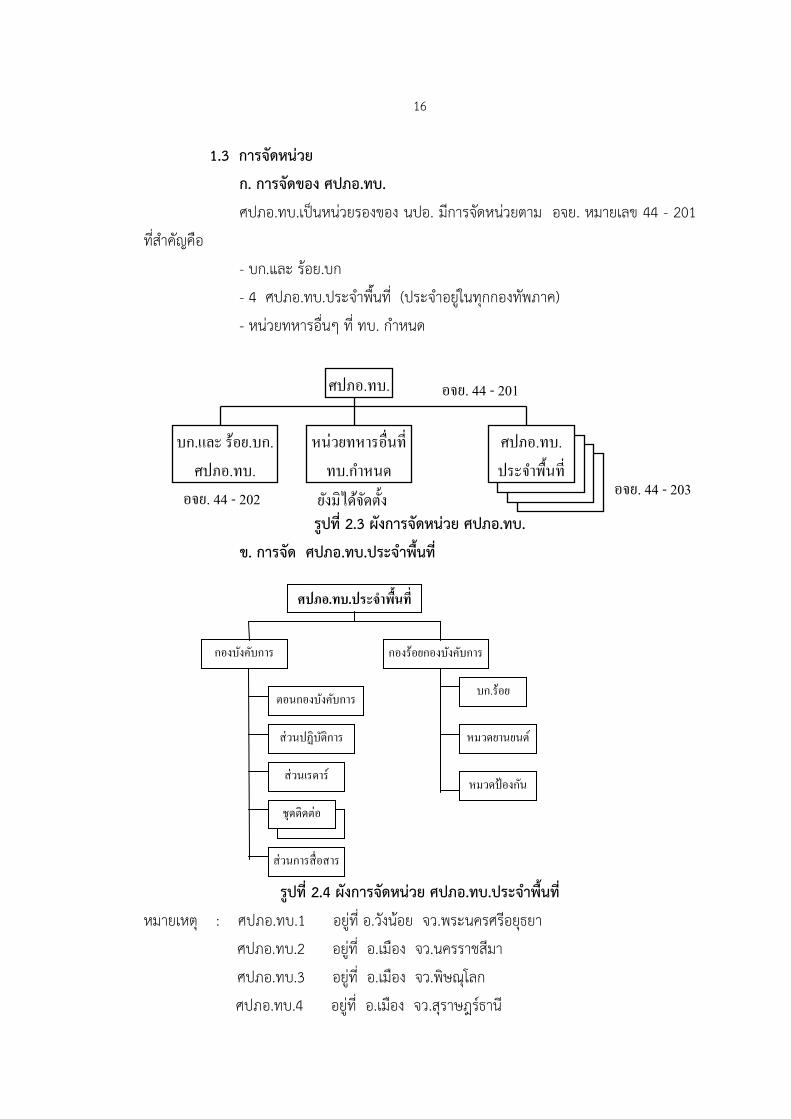
1.3 การจดหนวย ก. การจดของ ศปภอ.ทบ. ศปภอ.ทบ.เปนหนวยรองของ นปอ. มการจดหนวยตาม อจย. หมายเลข 44 - 201 ทส าคญคอ - บก.และ รอย.บก - 4 ศปภอ.ทบ.ประจ าพนท (ประจ าอยในทกกองทพภาค) - หนวยทหารอนๆ ท ทบ. ก าหนด
รปท 2.3 ผงการจดหนวย ศปภอ.ทบ. ข. การจด ศปภอ.ทบ.ประจ าพนท
รปท 2.4 ผงการจดหนวย ศปภอ.ทบ.ประจ าพนท หมายเหต : ศปภอ.ทบ.1 อยท อ.วงนอย จว.พระนครศรอยธยา ศปภอ.ทบ.2 อยท อ.เมอง จว.นครราชสมา ศปภอ.ทบ.3 อยท อ.เมอง จว.พษณโลก ศปภอ.ทบ.4 อยท อ.เมอง จว.สราษฎรธาน
สวนเรดาร
ศปภอ.ทบ.
บก.และ รอย.บก. ศปภอ.ทบ.
หนวยทหารอนท ทบ.ก าหนด
ศปภอ.ทบ. ประจ าพนท
อจย. 44 - 201
อจย. 44 - 203 ยงมไดจดตง อจย. 44 - 202
ศปภอ.ทบ.ประจ ำพนท
กองบงคบการ กองรอยกองบงคบการ
บก.รอย
หมวดยานยนต
หมวดปองกน
ตอนกองบงคบการ
สวนการสอสารสารสาร
สวนปฏบตการ
ชดตดตอ
17
2. หลกการเกยวกบโครงการพฒนาระบบแจงเตอนภย กองโรงงาน สอสารทหารอากาศ ไดใหความหมายระบบเรดารภาคพนดงน (กรง.ส.ทอ.บนอ. 2551 : 1-23) 2.1 เรดารเบองตน
1. เรดาร (RADAR) ยอมาจากค าวา Radio Detection And Ranging เปนเครองอเลกทรอนกสทใชคลนวทย ตรวจคนหาต าแหนงของเปาหมาย โดยสามารถอานระยะทาง ,ทศทาง ตลอดจนลกษณะของเปาหมายนน ๆ ได ตวเครองสงจะสรางความถวทยแลวปอนเขาสายอากาศคณลกษณะของสายอากาศจะสงพลงงานความถวทยออกไปเปนล าคลน แลวกวาดไปทวพนทรศมท าการคลนความถวทยน เมอกระทบเปาหมายจะสะทอนคลนวทยกลบมาเขาเครองรบทมความไวพเศษ แมวาคลนวทยทสะทอนออนก าลง แตหลงจากถกวงจรขยายก าลงใหสงพอกจะปอนสญญาณผานระบบตางๆแลวปรากฏบนจอเรดารได
การสะทอนกลบของคลนวทยความถสงมากๆ อาศยหลกการทางวทยาศาสตร 3 ขอ คอ (1) ความถของคลนไมโคร ระหวาง 1,000 MHz. ถง 6,000 MHz. สามารถสะทอนผวพน
ได เชนเดยวกบการสะทอนแสง (2) บรรดาความถวทยทออกจากเครองสงดวยก าลงสง สามารถบงคบใหพงออกเปนล าคลน
เหมอนล าแสงไฟฉายได โดยอาศยคณสมบตของสายอากาศแบบทมตวสะทอนรปกลบสม (ParabolicReflector)
(3) เพราะวาคลนวทยเดนทางดวยความเรวของแสง (186,000 ไมลทะเล ตอ วนาท) จงอาศยความเรวคงทน เปนหลกในการค านวณหาระยะทางของเปาหมายได
2.ประวตความเปนมา (1) เรดารไดเรมพฒนาใชงานตงแต ป ค.ศ. 1922 โดยม ดร.เอลเบรต เอช เทเลอร
(Dr.Albart H.Taylor) และ ดร.ยง (Dr.Young) สงกดหองทดลองของ ทร.สหรฐอเมรกา ไดทดลองจนประสบความส าเรจ จากความคดครงแรกทสงเกตวา เมอมเรอแลนผานวถทางทสงคลนวทยออก จะมสญญาณบางสวนสะทอนคลนวทยกลบมาเขาเครองรบจงเปนการเรมตนคนหาประโยชนจากการสะทอนกลบของคลนวทยดงกลาวตอไป
(2) ป ค.ศ.1941 ชวงเวลาดงกลาวเกดสงครามโลกครงทสอง องกฤษตองใชเครองบนจ านวนมาก ขนไปเตรยมพรอมอยในอากาศตลอดแนวชายฝง เพอเตรยมการขดขวางการโจมต จากฝงบนเยอรมนทมงเขาทงระเบดมหานครลอนดอน แตการน าเครองบนขนไปเตรยมพรอมบนอากาศตลอดเวลานน ท าใหองกฤษประสบปญหาขาดแคลนเชอเพลง นกบนไดรบความเหนอยลา, เกดความสกหรอของเครองบนโดยเปลาประโยชนเปนจ านวนมาก องกฤษจงไดจดระบบการปองกนภยทาง
18
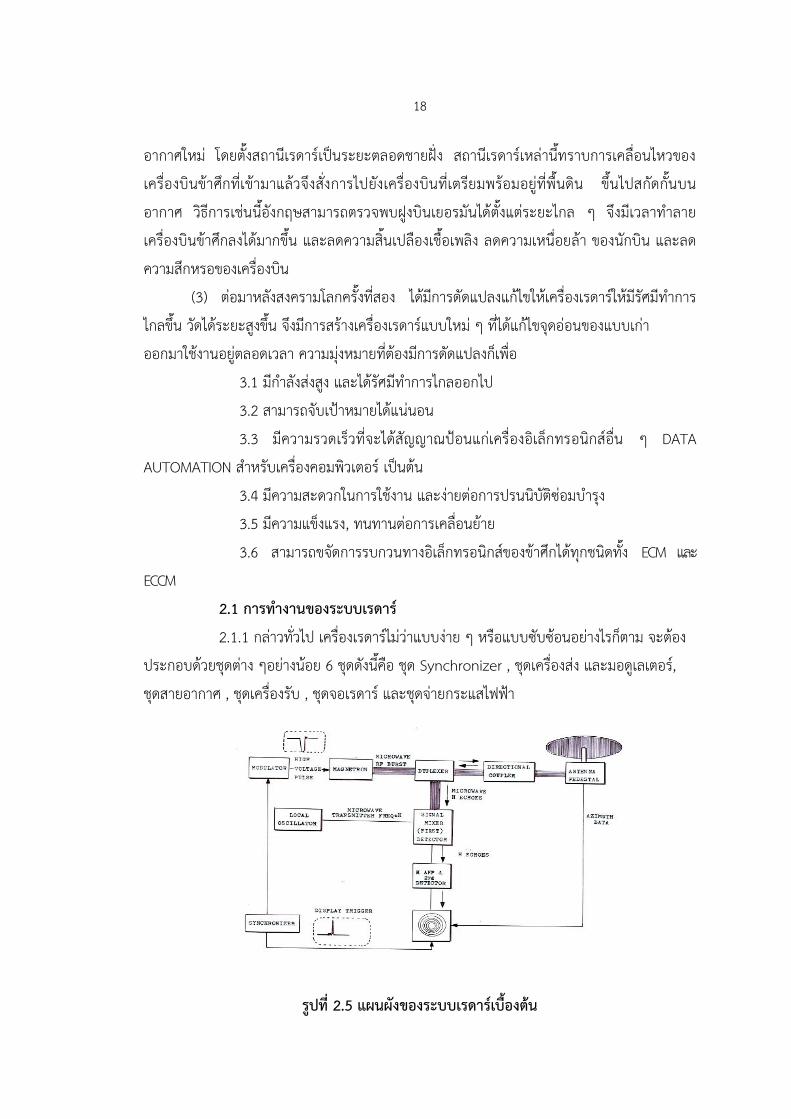
อากาศใหม โดยตงสถานเรดารเปนระยะตลอดชายฝง สถานเรดารเหลานทราบการเคลอนไหวของเครองบนขาศกทเขามาแลวจงสงการไปยงเครองบนทเตรยมพรอมอยทพนดน ขนไปสกดกนบนอากาศ วธการเชนนองกฤษสามารถตรวจพบฝงบนเยอรมนไดตงแตระยะไกล ๆ จงมเวลาท าลายเครองบนขาศกลงไดมากขน และลดความสนเปลองเชอเพลง ลดความเหนอยลา ของนกบน และลดความสกหรอของเครองบน (3) ตอมาหลงสงครามโลกครงทสอง ไดมการดดแปลงแกไขใหเครองเรดารใหมรศมท าการไกลขน วดไดระยะสงขน จงมการสรางเครองเรดารแบบใหม ๆ ทไดแกไขจดออนของแบบเกา ออกมาใชงานอยตลอดเวลา ความมงหมายทตองมการดดแปลงกเพอ 3.1 มก าลงสงสง และไดรศมท าการไกลออกไป 3.2 สามารถจบเปาหมายไดแนนอน 3.3 มความรวดเรวทจะไดสญญาณปอนแกเครองอเลกทรอนกสอน ๆ DATA AUTOMATION ส าหรบเครองคอมพวเตอร เปนตน 3.4 มความสะดวกในการใชงาน และงายตอการปรนนบตซอมบ ารง 3.5 มความแขงแรง, ทนทานตอการเคลอนยาย 3.6 สามารถขจดการรบกวนทางอเลกทรอนกสของขาศกไดทกชนดทง ECM และ ECCM 2.1 การท างานของระบบเรดาร 2.1.1 กลาวทวไป เครองเรดารไมวาแบบงาย ๆ หรอแบบซบซอนอยางไรกตาม จะตอง ประกอบดวยชดตาง ๆอยางนอย 6 ชดดงนคอ ชด Synchronizer , ชดเครองสง และมอดเลเตอร, ชดสายอากาศ , ชดเครองรบ , ชดจอเรดาร และชดจายกระแสไฟฟา
รปท 2.5 แผนผงของระบบเรดารเบองตน
19
2.1.2 Synchronizer (Timer) เปนหวใจของเครองเรดาร เพราะวาเปนเครองอเลกทรอนกสส าหรบระยะทาง บางทเรยก“Master Timer,Timer, Trigger Generator หรอKeyer” เปนตน หลกการของเรดารคอ วดระยะเวลาท คลนวทยเดนทางจากจดเรมตน และถก สะทอนกลบมายงจดเรมตน Synchronizer จะก าหนดพลงงานคลนวทย ทถกสงออกตามชวงเวลาทคลองจองกน ระหวางสงออกไป และรบเขามาแลวไปปรากฏบนจอเรดารพรอมๆกนกบทมสญญาณTrigger ไปปอนส Transmitter Modulator วงจรภายใน Synchronizer ทสรางสญญาณ Trigger กครงตอวนาท แลวไปปอน Transmitter Modulator เรยกวา“Master Oscillator” แลวยงเปนสญญาณ Synchronizer ทจอเรดารและระบบตาง ๆ ทเหลอใน Transmitter ดวย ความถของ Master Osc. จะเปนตวก าหนด Pulse Repetition Freq.(PRF) ของเรดารทงระบบ เชนท Range Marker และคลนกวาดของจอเรดาร คลนกวาด (Sweep Signal) จะเปนตวบอกระยะไกลทสด หรอระยะทางทใหเรดารท างาน พรอมทงตองท างานสมพนธกบ RF.Pulse วธชวยใหพนกงานเรดารหาระยะทางของเปาหมาย จากจดเรมกวาดคอ ปรบRange Marker ใหปรากฏเปนชวง ๆ ละ 5,10 หรอ 20 ไมล เพองายตอการวดระยะทหนาจอเรดาร 2.1.3 Transmitter Modulator ชดนประกอบดวย วงจรสรางรปคลนพลสส าหรบสง ออกมาและวงจรสงความถวทย เครองเรดารบางแบบจะแยก Transmitter กบ Modulator แลวตอกนดวยเคเบลทยอมให พลสแรงไฟสงผานเมอมสญญาณ Trigger จากชด Synchronizer จะไปกระตนชด Transmitter Modulator ใหสงคลนวทยทมแรงไฟสงมากออกมาเปนหวงสนๆ ซงอาจจะเปนแรงไฟสงถง 15,000 โวลท หรอมากกวานน ฉะนนการปฏบตงานเกยวกบเครองเรดาร ตองระวงอนตรายจากไฟฟาแรงสง เพราะอาจเปนอนตรายถงกบเสยชวตได ความกวางของรปคลนพลส ชวงเวลาของแตละรปคลนขนอยกบระบบเรดารแตละแบบ ทไมเหมอนกน กรณทใชเครองเรดารคนหาระยะทางไกล ตองใชความกวางของรปคลนพลสระหวาง 2 ถง 50 μs เพอใหสญญาณมก าลงสง ส าหรบเครองเรดารคนหาระยะทางใกล, เรดารเฝาตดตามขปนาวธ, เรดารบงคบการยง และเรดารควบคมการบน จะตองใชรปคลนทมพลสแคบ ประมาณ 1 µS หรอ นอยกวาเพอวดระยะไดแนนอน เรดารแบบแรก ๆ ใชความถประมาณ 100 MHz. มปญหาเกยวกบหลอดเครองสง คอ มอายการใชงานสน เพราะรอนจด และขวตอ สายตอภายในหลอด กมปญหาเกยวกบการเดนทางของอเลกตรอน (Transit Time) และคา Impedance ตาง ๆ ทลดก าลงออกอากาศ ยงใช ความถสงขนดวย เชน เรดารคนหาในยานความถ 1250 - 1350 MHz. (L-Band) และ เรดารวดระยะสงใชความถในยาน 2,700 - 2,900 MHz. (S-Band) เปนตน จะใชหลอดเครองสงแบบโบราณไมไดเลย จงตองพฒนาหลอดเครองสงมาเปนหลอด Magnetrons, Klystrons, Carcinotrons,
20
Traveling wave tubes, amplitrons และ Broad - Band Twystron (2.9-3.1 GHz.) ในเรดาร 3 มต (3D-TPS-43E) เปนตน - หลอด Magnetron จะถกกระตนใหสรางรปคลนทนท ทไดรบพลสแรงไฟสงชวงสน ๆ ทเขามาแลวระเบดพลงงานคลนวทยก าลงสงสง ส าหรบสงออกอากาศ - หลอด Klystron นยมใชมาก เพราะม Gain สง ถาปอน Pulse รปคลนวทยทไดจาก Stalo = Stable Local Oscillator ทมก าลงต าประมาณไมเกน 200 วตต เขา หลอด Klystron กจะสรางพลงคลนวทยก าลงสงออกมาสงสด 2 ถง 2.75 ลานวตต เปนตน - ขอด ของหลอด Klystron กคอความถคงท เปนผลใหระบบ MTI = Moving Target Indicatorท างานไดสมบรณ สวนประกอบทส าคญในการสงคลนวทยออกอากาศน คอ ระบบระบายความรอน และ ระบบอดอากาศในทอสงคลน จะตองมอณหภมและมความกดดนอากาศคงท ตามล าดบ ทงนเพอปองกนแรงไฟกระโดดในทอสงคลน ภายในระบบอดอากาศจะตองมชดปมลม, ชดกรองอากาศ, และชดกรองความชน (Dehydrator) ชดตาง ๆ ดงกลาวจะตองมการตรวจสอบเสมอ 2.1.4 สายอากาศ ปกตจะท าหนาทแพรกระจายคลนแมเหลกไฟฟาสอากาศ หรอรบคลนจากอากาศ สายอากาศทดจะตองม Characteristic Impedance (ZO) เทากบ สายสงก าลงหรอทอสงคลน และตองมชดสะทอนคลน (Reflector) มาประกอบกบสายอากาศ เพอเพมก าลงรบ-สงสญญาณ และชวยใหหาทศทาง และมมเงยของเปาหมายไดแนนอน ระบบสายอากาศทสมบรณจะตองประกอบดวยชดขบเคลอนและชดควบคมการขบเคลอน 2.1.4.1 ในสายอากาศทเปนทศทาง จะตองค านงถงสงตอไปน - มมของล าคลนทสงออกไป (Beam Angle) - เปอรเซนตของ Side Lobe ทเกดขนจากการแพรกระจายคลนของสายอากาศ ประมาณ 10 % - ก าลงการขยายของสายอากาศ - รปแบบของจานสายอากาศ (Reflector) 2.1.4.2 ระบบสายอากาศทมการขบเคลอนจะประกอบดวยสวนใหญ ๆ ดงน - จานสายอากาศ (Reflector) - ตวปอนก าลงงาน และรบก าลงงานจากสายอากาศ (Feed Horn) - ขอตอในการสงผานก าลงงานในสวนทเคลอนท (Rotary Joint) - อปกรณตดตอก าลงงานเพอแยกการสง และรบก าลงงาน (Duplexer) - ระบบ SYNCHRO และ / หรอ ACP (Azimuth Change Pulse)
21
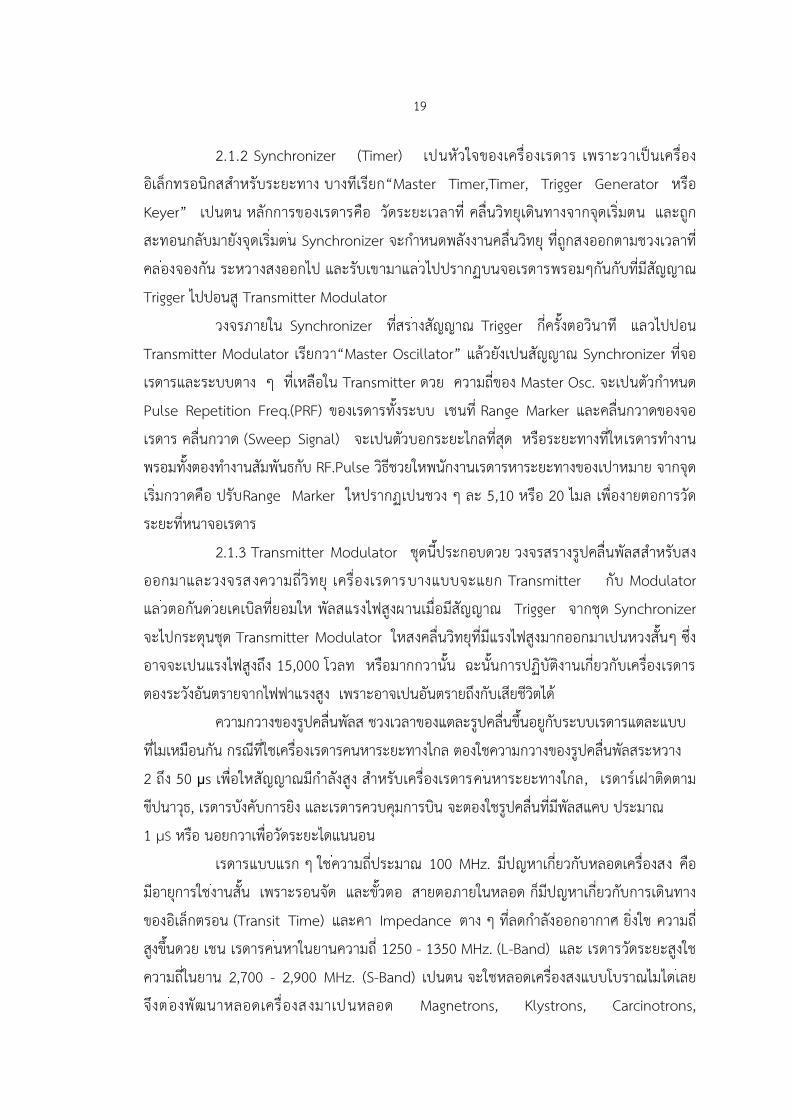
2.1.4.3 Reflector ท าหนาทสะทอนก าลงงานทสงจาก Feed Horn ออกไปสบรรยากาศใหไดรปแบบ และทศทางตามตองการ รวมถงการรวบรวมสญญาณทสะทอนกลบเขามาในระบบเรดารสวนมาก Reflector จะเปนแบบทมพนผวราบเรยบ เพอใหการแพรกระจายคลนเปนไปอยางคงท และไดรปแบบตามตองการ จานสายอากาศทนยมใชทวไปจะเปนแบบ PARABOLIC ซงมอย 4 แบบ ดวยกน คอ - PARABOLIC CYLINDER - PARABOLOID - TRUNCATED PARABOLOID - ORANGE-PEEL PARABOLOID
รปท 2.6 PARABOLIC ANTENA
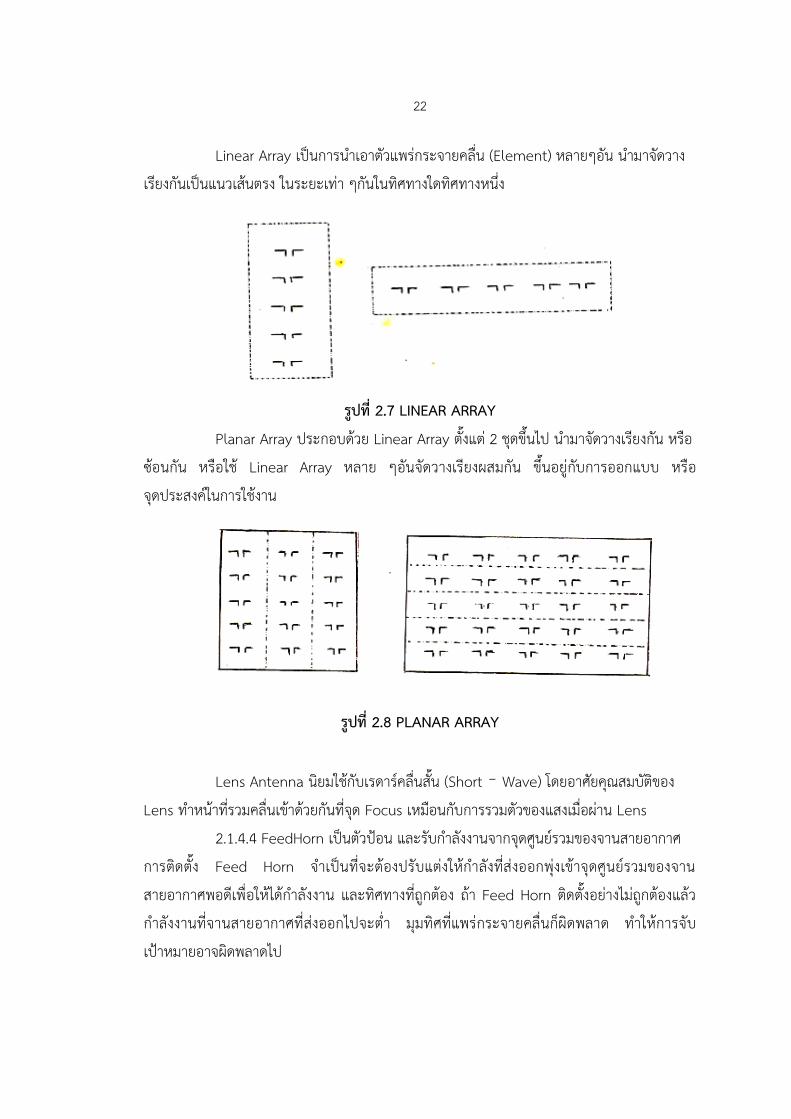
สายอากาศแบบ Parabolic มการน ามาใชงานโดยทวไป การกระจายก าลงอาศยการปอนก าลงงานจาก Feed Horn ปอนเขาทจดศนยรวมของจานสายอากาศ คลนสญญาณทสะทอนออกไปจะเปนแนวขนานซงกนและกน และจะตงฉากกบแนวแกนของสายอากาศ หมายถงวา พลงงานทสะทอนออกไปมความสมพนธทางมมเดยวกน นอกจากสายอากาศแบบ Parabolic ทกลาวมาแลว ยงมสายอากาศอกหลายชนดทน ามาใชงานเชนเดยวกน เชน สายอากาศแบบ Lens, และสายอากาศแบบ Array เปนตน สายอากาศแบบ Array เปนสายอากาศอกแบบหนงซงมการใชอยางกวางขวางเชนเดยวกนในปจจบน สายอากาศแบบ Array จะประกอบดวยตวแพรกระจายคลน (Elment) หลาย ๆอนน ามาวางเรยงกนในระยะเทาๆกน ใชความสมพนธทางมม (Phase) และ Amplitude ของสญญาณปอนใหกบตว แพรกระจายคลนแตละอนเพอควบคมการแพรกระจายคลนใหไดรปแบบของคลนทกระจายออกไปตามตองการ สายอากาศแบบ Array ทใชทวไปม 2 แบบ คอ LINEAR ARRAY และ PLANAR ARRAY
22
Linear Array เปนการน าเอาตวแพรกระจายคลน (Element) หลายๆอน น ามาจดวาง เรยงกนเปนแนวเสนตรง ในระยะเทา ๆกนในทศทางใดทศทางหนง
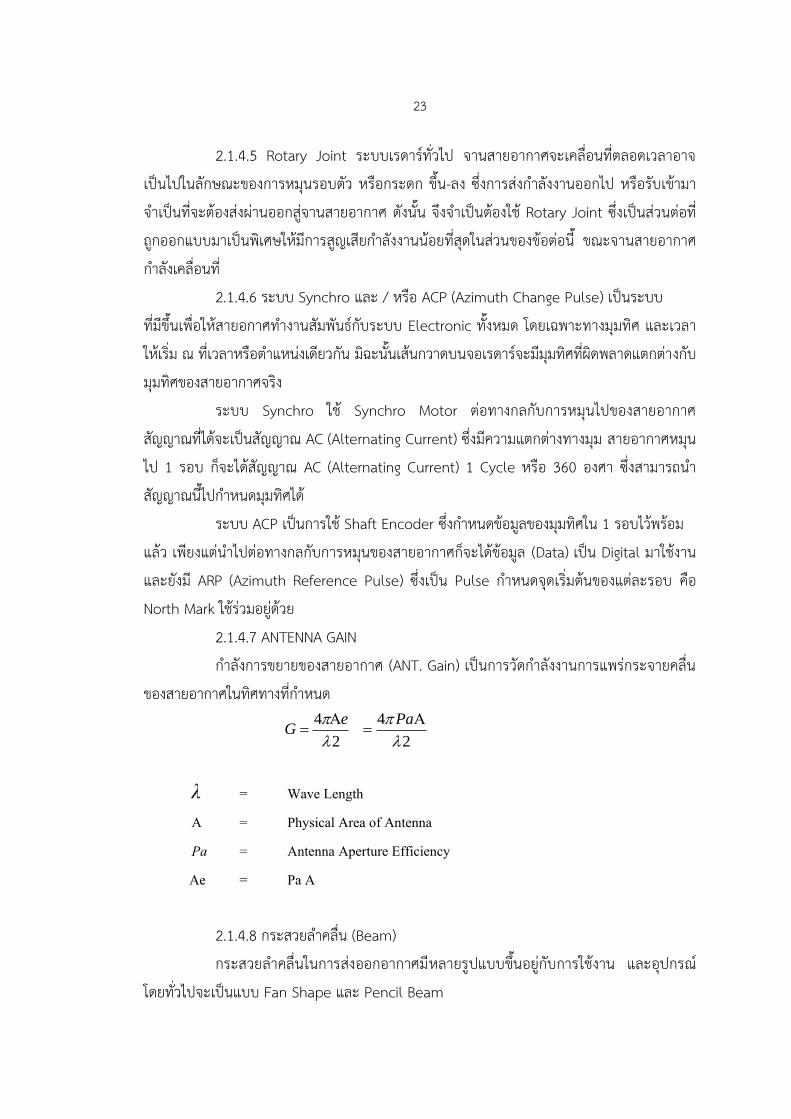
รปท 2.7 LINEAR ARRAY Planar Array ประกอบดวย Linear Array ตงแต 2 ชดขนไป น ามาจดวางเรยงกน หรอ ซอนกน หรอใช Linear Array หลาย ๆอนจดวางเรยงผสมกน ขนอยกบการออกแบบ หรอจดประสงคในการใชงาน
รปท 2.8 PLANAR ARRAY
Lens Antenna นยมใชกบเรดารคลนสน (Short – Wave) โดยอาศยคณสมบตของ Lens ท าหนาทรวมคลนเขาดวยกนทจด Focus เหมอนกบการรวมตวของแสงเมอผาน Lens 2.1.4.4 FeedHorn เปนตวปอน และรบก าลงงานจากจดศนยรวมของจานสายอากาศ การตดตง Feed Horn จ าเปนทจะตองปรบแตงใหก าลงทสงออกพงเขาจดศนยรวมของจานสายอากาศพอดเพอใหไดก าลงงาน และทศทางทถกตอง ถา Feed Horn ตดตงอยางไมถกตองแลวก าลงงานทจานสายอากาศทสงออกไปจะต า มมทศทแพรกระจายคลนกผดพลาด ท าใหการจบเปาหมายอาจผดพลาดไป
23
2.1.4.5 Rotary Joint ระบบเรดารทวไป จานสายอากาศจะเคลอนทตลอดเวลาอาจเปนไปในลกษณะของการหมนรอบตว หรอกระดก ขน-ลง ซงการสงก าลงงานออกไป หรอรบเขามาจ าเปนทจะตองสงผานออกสจานสายอากาศ ดงนน จงจ าเปนตองใช Rotary Joint ซงเปนสวนตอทถกออกแบบมาเปนพเศษใหมการสญเสยก าลงงานนอยทสดในสวนของขอตอน ขณะจานสายอากาศก าลงเคลอนท 2.1.4.6 ระบบ Synchro และ / หรอ ACP (Azimuth Change Pulse) เปนระบบ ทมขนเพอใหสายอกาศท างานสมพนธกบระบบ Electronic ทงหมด โดยเฉพาะทางมมทศ และเวลาใหเรม ณ ทเวลาหรอต าแหนงเดยวกน มฉะนนเสนกวาดบนจอเรดารจะมมมทศทผดพลาดแตกตางกบ มมทศของสายอากาศจรง ระบบ Synchro ใช Synchro Motor ตอทางกลกบการหมนไปของสายอากาศ สญญาณทไดจะเปนสญญาณ AC (Alternating Current) ซงมความแตกตางทางมม สายอากาศหมนไป 1 รอบ กจะไดสญญาณ AC (Alternating Current) 1 Cycle หรอ 360 องศา ซงสามารถน าสญญาณนไปก าหนดมมทศได ระบบ ACP เปนการใช Shaft Encoder ซงก าหนดขอมลของมมทศใน 1 รอบไวพรอม แลว เพยงแตน าไปตอทางกลกบการหมนของสายอากาศกจะไดขอมล (Data) เปน Digital มาใชงาน และยงม ARP (Azimuth Reference Pulse) ซงเปน Pulse ก าหนดจดเรมตนของแตละรอบ คอ North Mark ใชรวมอยดวย 2.1.4.7 ANTENNA GAIN ก าลงการขยายของสายอากาศ (ANT. Gain) เปนการวดก าลงงานการแพรกระจายคลนของสายอากาศในทศทางทก าหนด
4
2
eG
4
2
Pa
λ = Wave Length A = Physical Area of Antenna Pa = Antenna Aperture Efficiency
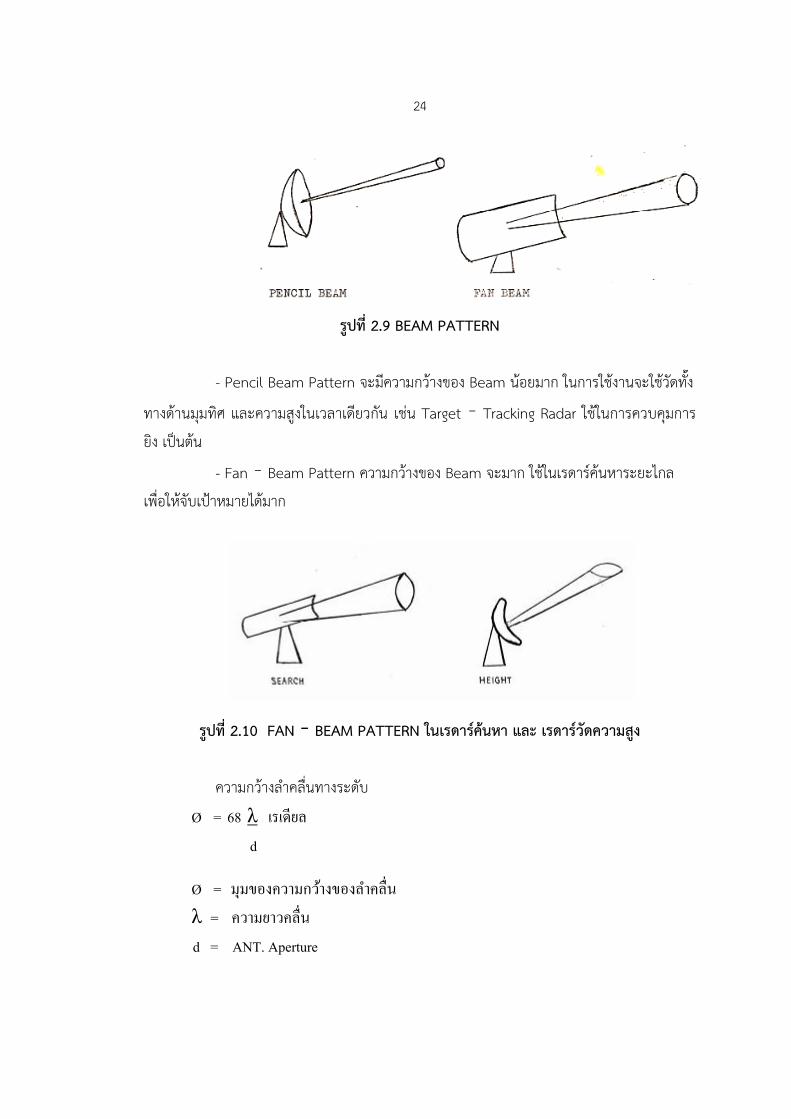
Ae = Pa A 2.1.4.8 กระสวยล าคลน (Beam) กระสวยล าคลนในการสงออกอากาศมหลายรปแบบขนอยกบการใชงาน และอปกรณโดยทวไปจะเปนแบบ Fan Shape และ Pencil Beam
24
รปท 2.9 BEAM PATTERN - Pencil Beam Pattern จะมความกวางของ Beam นอยมาก ในการใชงานจะใชวดทง
ทางดานมมทศ และความสงในเวลาเดยวกน เชน Target – Tracking Radar ใชในการควบคมการยง เปนตน
- Fan – Beam Pattern ความกวางของ Beam จะมาก ใชในเรดารคนหาระยะไกล เพอใหจบเปาหมายไดมาก
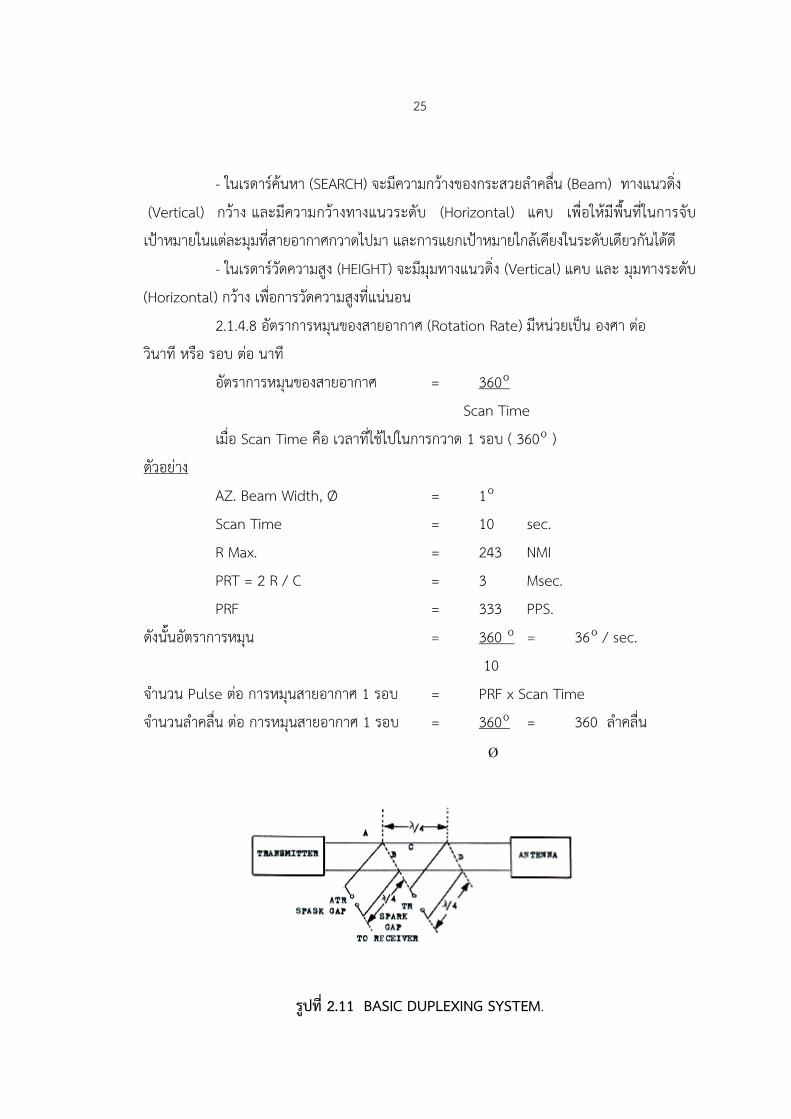
รปท 2.10 FAN – BEAM PATTERN ในเรดารคนหา และ เรดารวดความสง ความกวางล าคลนทางระดบ
Ø = 68 λ เรเดยล d
Ø = มมของความกวางของล าคลน
λ = ความยาวคลน
d = ANT. Aperture
25
- ในเรดารคนหา (SEARCH) จะมความกวางของกระสวยล าคลน (Beam) ทางแนวดง (Vertical) กวาง และมความกวางทางแนวระดบ (Horizontal) แคบ เพอใหมพนทในการจบเปาหมายในแตละมมทสายอากาศกวาดไปมา และการแยกเปาหมายใกลเคยงในระดบเดยวกนไดด - ในเรดารวดความสง (HEIGHT) จะมมมทางแนวดง (Vertical) แคบ และ มมทางระดบ (Horizontal) กวาง เพอการวดความสงทแนนอน 2.1.4.8 อตราการหมนของสายอากาศ (Rotation Rate) มหนวยเปน องศา ตอ วนาท หรอ รอบ ตอ นาท อตราการหมนของสายอากาศ = 360º Scan Time เมอ Scan Time คอ เวลาทใชไปในการกวาด 1 รอบ ( 360º ) ตวอยาง AZ. Beam Width, Ø = 1º Scan Time = 10 sec. R Max. = 243 NMI PRT = 2 R / C = 3 Msec. PRF = 333 PPS. ดงนนอตราการหมน = 360 º = 36º / sec. 10 จ านวน Pulse ตอ การหมนสายอากาศ 1 รอบ = PRF x Scan Time จ านวนล าคลน ตอ การหมนสายอากาศ 1 รอบ = 360º = 360 ล าคลน
Ø
รปท 2.11 BASIC DUPLEXING SYSTEM.
26
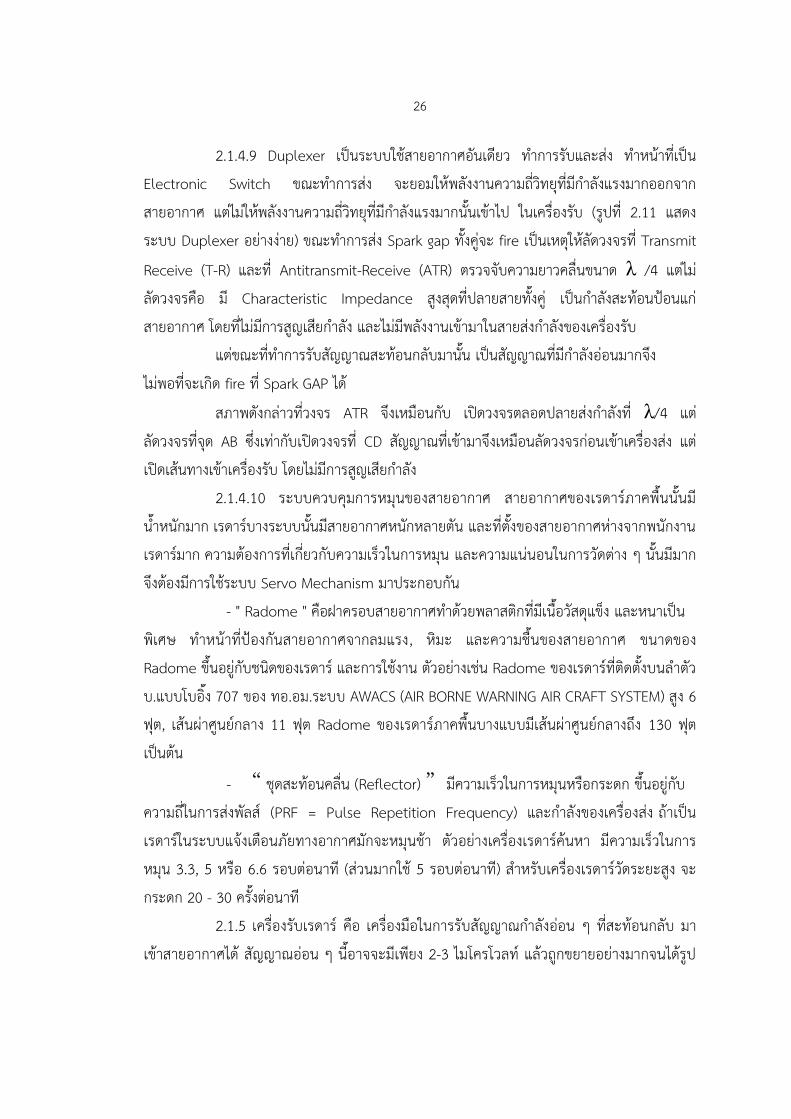
2.1.4.9 Duplexer เปนระบบใชสายอากาศอนเดยว ท าการรบและสง ท าหนาทเปนElectronic Switch ขณะท าการสง จะยอมใหพลงงานความถวทยทมก าลงแรงมากออกจากสายอากาศ แตไมใหพลงงานความถวทยทมก าลงแรงมากนนเขาไป ในเครองรบ (รปท 2.11 แสดงระบบ Duplexer อยางงาย) ขณะท าการสง Spark gap ทงคจะ fire เปนเหตใหลดวงจรท Transmit
Receive (T-R) และท Antitransmit-Receive (ATR) ตรวจจบความยาวคลนขนาด λ /4 แตไมลดวงจรคอ ม Characteristic Impedance สงสดทปลายสายทงค เปนก าลงสะทอนปอนแกสายอากาศ โดยทไมมการสญเสยก าลง และไมมพลงงานเขามาในสายสงก าลงของเครองรบ แตขณะทท าการรบสญญาณสะทอนกลบมานน เปนสญญาณทมก าลงออนมากจง ไมพอทจะเกด fire ท Spark GAP ได
สภาพดงกลาวทวงจร ATR จงเหมอนกบ เปดวงจรตลอดปลายสงก าลงท λ/4 แตลดวงจรทจด AB ซงเทากบเปดวงจรท CD สญญาณทเขามาจงเหมอนลดวงจรกอนเขาเครองสง แตเปดเสนทางเขาเครองรบ โดยไมมการสญเสยก าลง 2.1.4.10 ระบบควบคมการหมนของสายอากาศ สายอากาศของเรดารภาคพนนนมน าหนกมาก เรดารบางระบบนนมสายอากาศหนกหลายตน และทตงของสายอากาศหางจากพนกงานเรดารมาก ความตองการทเกยวกบความเรวในการหมน และความแนนอนในการวดตาง ๆ นนมมาก จงตองมการใชระบบ Servo Mechanism มาประกอบกน
- " Radome " คอฝาครอบสายอากาศท าดวยพลาสตกทมเนอวสดแขง และหนาเปน พเศษ ท าหนาทปองกนสายอากาศจากลมแรง, หมะ และความชนของสายอากาศ ขนาดของRadome ขนอยกบชนดของเรดาร และการใชงาน ตวอยางเชน Radome ของเรดารทตดตงบนล าตว บ.แบบโบอง 707 ของ ทอ.อม.ระบบ AWACS (AIR BORNE WARNING AIR CRAFT SYSTEM) สง 6 ฟต, เสนผาศนยกลาง 11 ฟต Radome ของเรดารภาคพนบางแบบมเสนผาศนยกลางถง 130 ฟต เปนตน
- “ ชดสะทอนคลน (Reflector) ”มความเรวในการหมนหรอกระดก ขนอยกบ ความถในการสงพลส (PRF = Pulse Repetition Frequency) และก าลงของเครองสง ถาเปน เรดารในระบบแจงเตอนภยทางอากาศมกจะหมนชา ตวอยางเครองเรดารคนหา มความเรวในการหมน 3.3, 5 หรอ 6.6 รอบตอนาท (สวนมากใช 5 รอบตอนาท) ส าหรบเครองเรดารวดระยะสง จะกระดก 20 - 30 ครงตอนาท 2.1.5 เครองรบเรดาร คอ เครองมอในการรบสญญาณก าลงออน ๆ ทสะทอนกลบ มาเขาสายอากาศได สญญาณออน ๆ นอาจจะมเพยง 2-3 ไมโครโวลท แลวถกขยายอยางมากจนไดรป
27
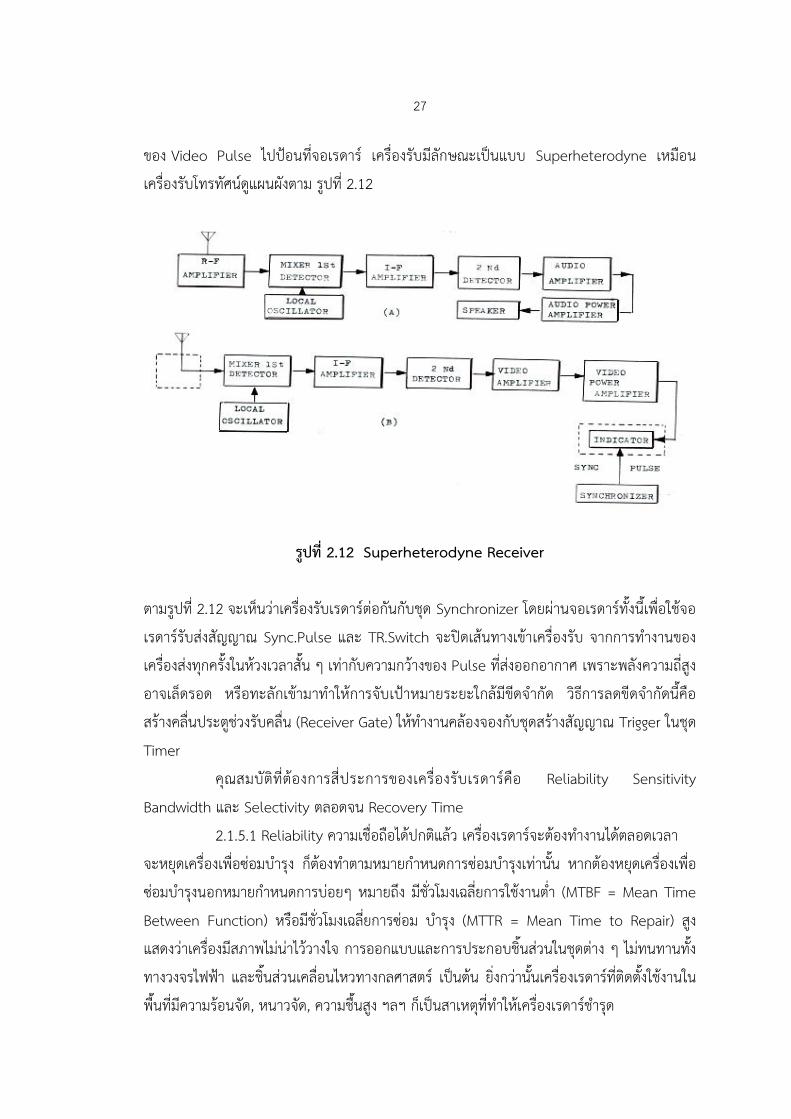
ของ Video Pulse ไปปอนทจอเรดาร เครองรบมลกษณะเปนแบบ Superheterodyne เหมอนเครองรบโทรทศนดแผนผงตาม รปท 2.12
รปท 2.12 Superheterodyne Receiver ตามรปท 2.12 จะเหนวาเครองรบเรดารตอกนกบชด Synchronizer โดยผานจอเรดารทงนเพอใชจอเรดารรบสงสญญาณ Sync.Pulse และ TR.Switch จะปดเสนทางเขาเครองรบ จากการท างานของเครองสงทกครงในหวงเวลาสน ๆ เทากบความกวางของ Pulse ทสงออกอากาศ เพราะพลงความถสงอาจเลดรอด หรอทะลกเขามาท าใหการจบเปาหมายระยะใกลมขดจ ากด วธการลดขดจ ากดนคอ สรางคลนประตชวงรบคลน (Receiver Gate) ใหท างานคลองจองกบชดสรางสญญาณ Trigger ในชด Timer คณสมบตทตองการสประการของเครองรบเรดารคอ Reliability Sensitivity Bandwidth และ Selectivity ตลอดจน Recovery Time 2.1.5.1 Reliability ความเชอถอไดปกตแลว เครองเรดารจะตองท างานไดตลอดเวลา จะหยดเครองเพอซอมบ ารง กตองท าตามหมายก าหนดการซอมบ ารงเทานน หากตองหยดเครองเพอซอมบ ารงนอกหมายก าหนดการบอยๆ หมายถง มชวโมงเฉลยการใชงานต า (MTBF = Mean Time Between Function) หรอมชวโมงเฉลยการซอม บ ารง (MTTR = Mean Time to Repair) สง แสดงวาเครองมสภาพไมนาไววางใจ การออกแบบและการประกอบชนสวนในชดตาง ๆ ไมทนทานทงทางวงจรไฟฟา และชนสวนเคลอนไหวทางกลศาสตร เปนตน ยงกวานนเครองเรดารทตดตงใชงานในพนทมความรอนจด, หนาวจด, ความชนสง ฯลฯ กเปนสาเหตทท าใหเครองเรดารช ารด
28
และมปญหาขดของได ทงทชางซอมบ ารงกไดท าการซอมบ ารงตามก าหนดการทก าหนดไวแลวกตามอาจชวยไดมากถามการตรวจ และควบคมคณภาพตามระยะเวลา ด าเนนการตามแผนการตรวจซอมระดบโรงงานท กวก.ส.ทอ.บนอ. ก าหนดไวใหอยางกวดขนและตอเนอง 2.1.5.2 Sensitivity ความไวในการรบสญญาณ และอตราสวนของสญญาณตอคลนรบกวน (Signal To Noise Ratio) ตองมความสมพนธกน คลนรบกวนทเกดจากสภาพอากาศ และสญญาณรบกวนตาง ๆ (Interference) รวมทง Fluctuation Noise (คลนรบกวนจากการเคลอนทของอเลกตรอนผานตวน าหรอวตถซงตวน าในวงจรตางๆ) และ Avoidable noise ทเกดจากหนาสมผสของรเลย มอเตอรเยนเนอเรเตอร แหลงจาย กระแสไฟฟาทกรองไมเรยบ ตลอดจนการสนสะเทอนของอปกรณตาง ๆ ปจจบนเครองรบสมยใหมใช Paramatic Amplifier แกปญหาสญญาณรบกวนแลว ปรบปรงความไวของเครองรบไดผลดยงขน 2.1.5.3 Band Width and Selectivity คอ การสนองตอบตอความถ (Frequency Response) คดจากจด 0.707 ของคาสงสดของความถแตกตางระหวางจด คอความกวางแถบคลน (Bandwidth) และการเลอกรบ (Selectivity) จะเพมขน ถาความกวางแถบคลนลดลง มผลใหแยกเปาหมายไดละเอยดขน คอเปาหมายทปรากฏบนจอไมพรา
สตรหาความสมพนธระหวางความกวางของพลส และความกวางของแถบคลนในวงจรขยายคอ BW = F r Q BW = ความกวางของแถบคลนภาพหนวยวงจรตอวนาท Q = คณภาพของวงจร Fr = ความกวางของความถตอบสนอง (Frequency Response) ในวงจรขยาย 2.1.5.4 Recovery Time คอ เวลาทวงจรเครองรบเรดาร ตองการปรบตว หรอคนส สภาพท างานปกต หลงจากทไดรบสญญาณแรง ๆ จากเครองใกลเคยง เครองเรดารทออกแบบดจะม Recovery สนมาก วงจรส าหรบลดสญญาณแรง ๆ ทเขามาไดแก วงจรปรบเกณฑการขยายโดยอตโนมต (AGC = Automatic Gain Control) วงจรรกษาเวลาคงทโดยรวดเรว (FTC = Fast Time Constant) และวงจรปรบเกณฑการขยายโดยอตโนมตชนดฉบพลน (IAGC = Instanteneous Automatic Gain control)
29
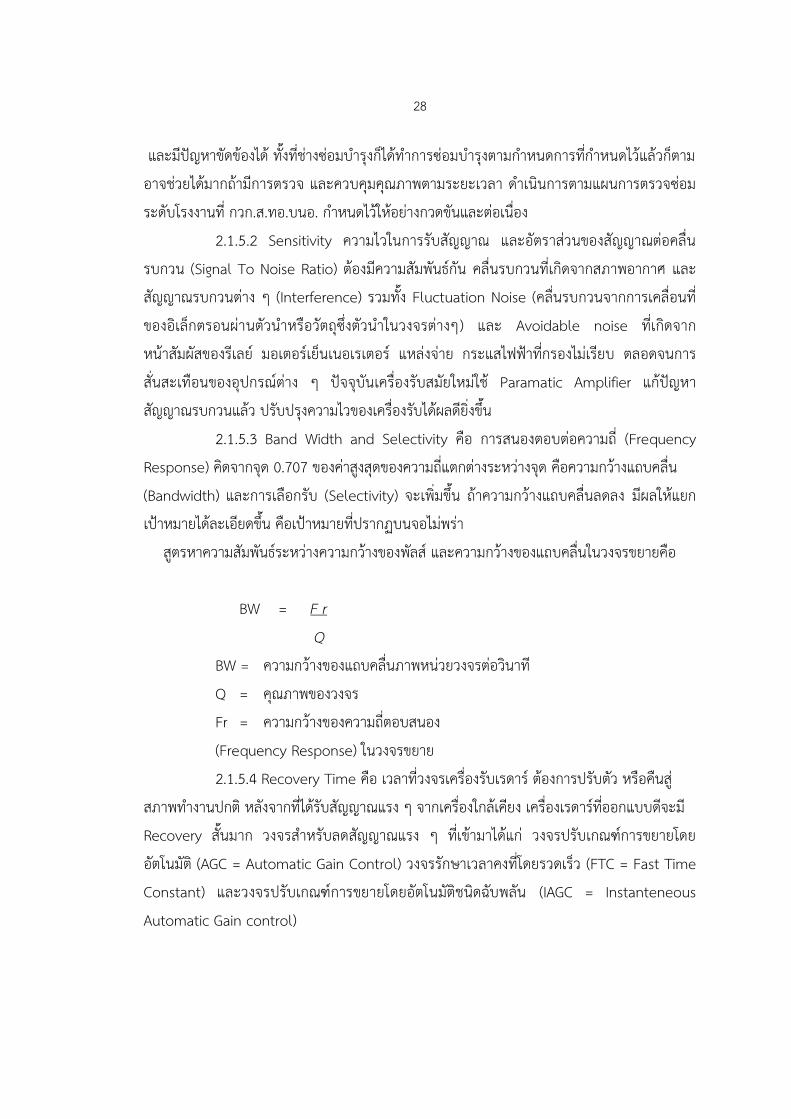
วงจรดงกลาวจะตดสญญาณรบกวน เชน Ground Clutter หรอรกษาระดบของ Noise ไวเพยงแตนนในเรองเรดารแบบใหม จะม Sidelobe Cancellation หรอ Dicke-fix ซง นอกเหนอไปจาก Log. หรอ PIE แลวยงมผลดในดาน ECCM มากยงขน
รปท 2.13 PPI TUBE CIRCUIT
รปท 2.14 ELECTROMAGNETIC AND ELECTROSTATIC CRT
30
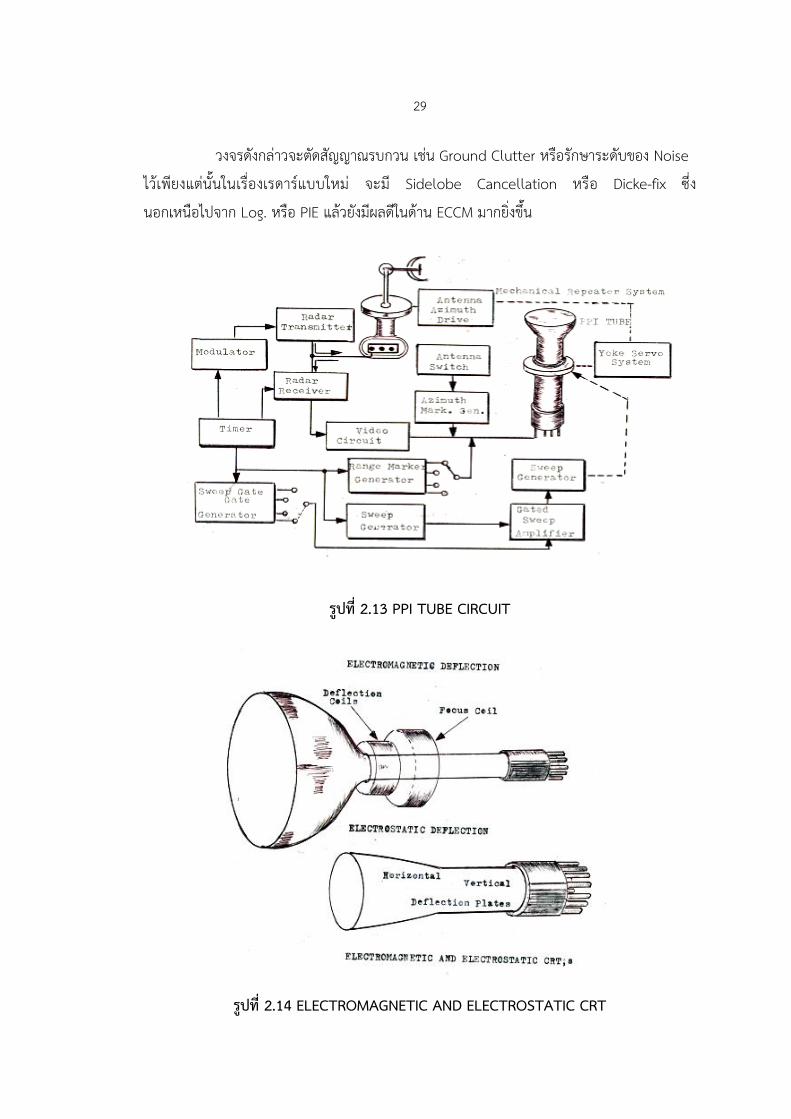
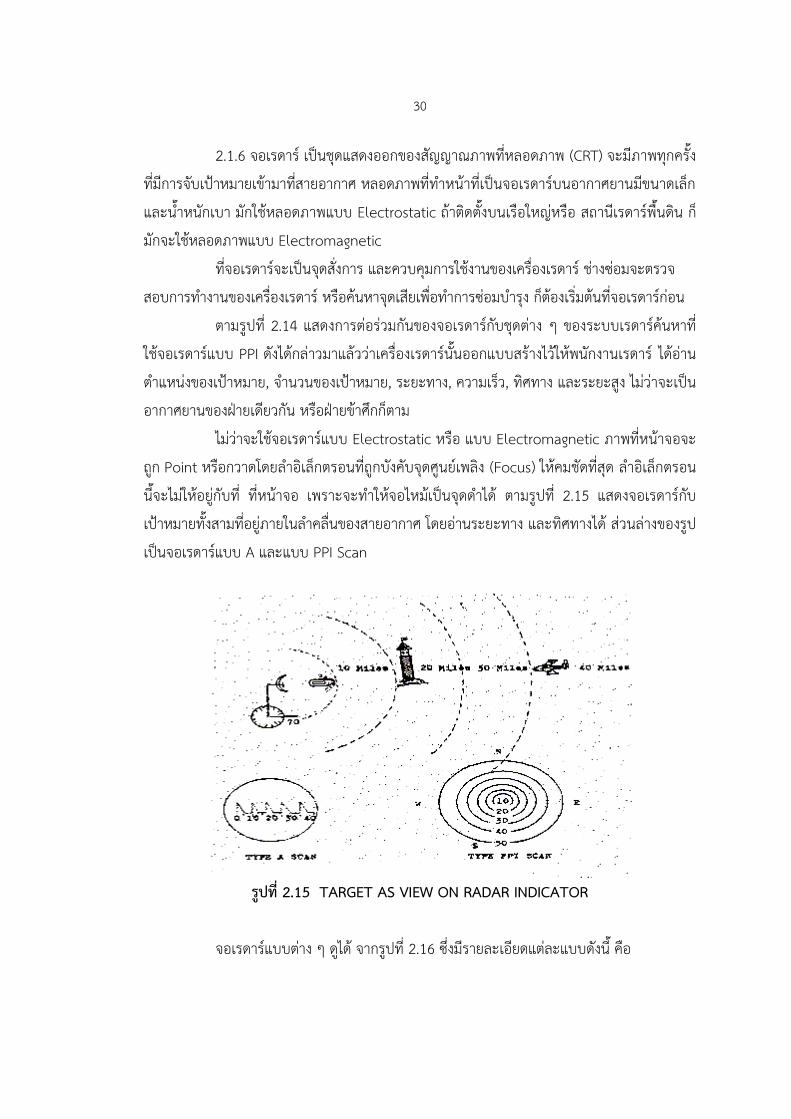
2.1.6 จอเรดาร เปนชดแสดงออกของสญญาณภาพทหลอดภาพ (CRT) จะมภาพทกครงทมการจบเปาหมายเขามาทสายอากาศ หลอดภาพทท าหนาทเปนจอเรดารบนอากาศยานมขนาดเลก และน าหนกเบา มกใชหลอดภาพแบบ Electrostatic ถาตดตงบนเรอใหญหรอ สถานเรดารพนดน กมกจะใชหลอดภาพแบบ Electromagnetic ทจอเรดารจะเปนจดสงการ และควบคมการใชงานของเครองเรดาร ชางซอมจะตรวจ สอบการท างานของเครองเรดาร หรอคนหาจดเสยเพอท าการซอมบ ารง กตองเรมตนทจอเรดารกอน ตามรปท 2.14 แสดงการตอรวมกนของจอเรดารกบชดตาง ๆ ของระบบเรดารคนหาทใชจอเรดารแบบ PPI ดงไดกลาวมาแลววาเครองเรดารนนออกแบบสรางไวใหพนกงานเรดาร ไดอานต าแหนงของเปาหมาย, จ านวนของเปาหมาย, ระยะทาง, ความเรว, ทศทาง และระยะสง ไมวาจะเปนอากาศยานของฝายเดยวกน หรอฝายขาศกกตาม ไมวาจะใชจอเรดารแบบ Electrostatic หรอ แบบ Electromagnetic ภาพทหนาจอจะถก Point หรอกวาดโดยล าอเลกตรอนทถกบงคบจดศนยเพลง (Focus) ใหคมชดทสด ล าอเลกตรอนนจะไมใหอยกบท ทหนาจอ เพราะจะท าใหจอไหมเปนจดด าได ตามรปท 2.15 แสดงจอเรดารกบเปาหมายทงสามทอยภายในล าคลนของสายอากาศ โดยอานระยะทาง และทศทางได สวนลางของรปเปนจอเรดารแบบ A และแบบ PPI Scan
รปท 2.15 TARGET AS VIEW ON RADAR INDICATOR จอเรดารแบบตาง ๆ ดได จากรปท 2.16 ซงมรายละเอยดแตละแบบดงน คอ
31
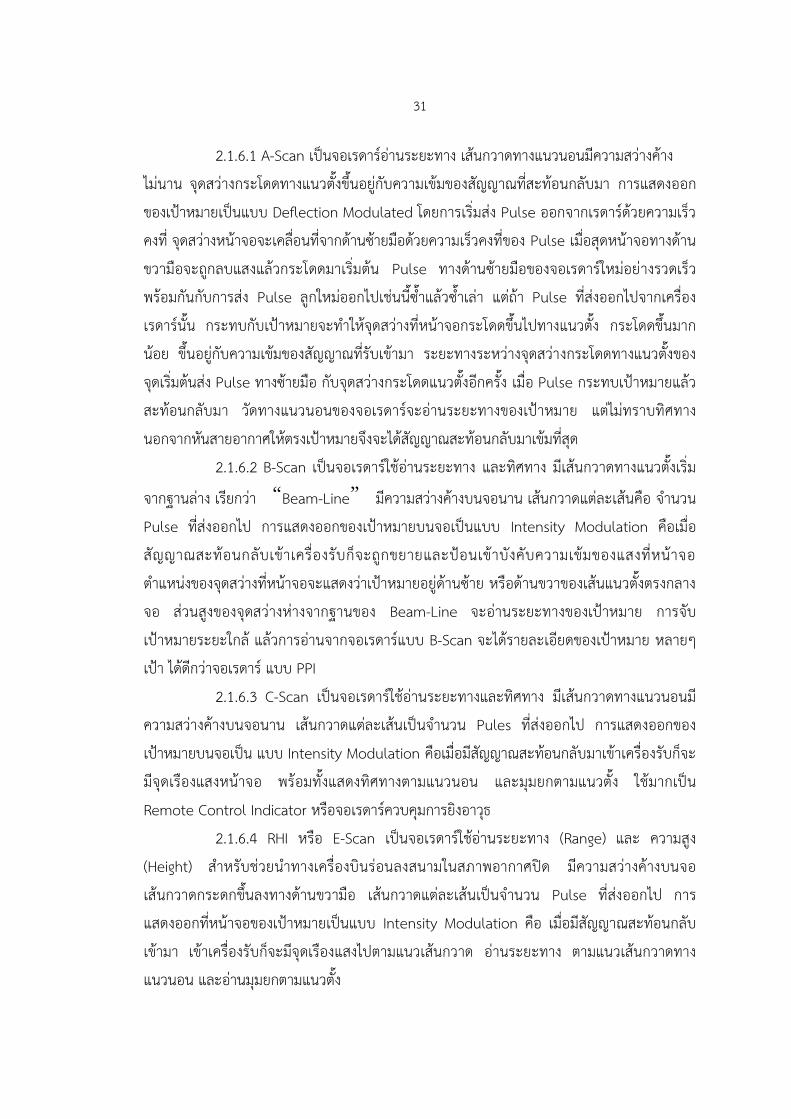
2.1.6.1 A-Scan เปนจอเรดารอานระยะทาง เสนกวาดทางแนวนอนมความสวางคาง ไมนาน จดสวางกระโดดทางแนวตงขนอยกบความเขมของสญญาณทสะทอนกลบมา การแสดงออกของเปาหมายเปนแบบ Deflection Modulated โดยการเรมสง Pulse ออกจากเรดารดวยความเรวคงท จดสวางหนาจอจะเคลอนทจากดานซายมอดวยความเรวคงทของ Pulse เมอสดหนาจอทางดานขวามอจะถกลบแสงแลวกระโดดมาเรมตน Pulse ทางดานซายมอของจอเรดารใหมอยางรวดเรว พรอมกนกบการสง Pulse ลกใหมออกไปเชนนซ าแลวซ าเลา แตถา Pulse ทสงออกไปจากเครองเรดารนน กระทบกบเปาหมายจะท าใหจดสวางทหนาจอกระโดดขนไปทางแนวตง กระโดดขนมากนอย ขนอยกบความเขมของสญญาณทรบเขามา ระยะทางระหวางจดสวางกระโดดทางแนวตงของจดเรมตนสง Pulse ทางซายมอ กบจดสวางกระโดดแนวตงอกครง เมอ Pulse กระทบเปาหมายแลวสะทอนกลบมา วดทางแนวนอนของจอเรดารจะอานระยะทางของเปาหมาย แตไมทราบทศทางนอกจากหนสายอากาศใหตรงเปาหมายจงจะไดสญญาณสะทอนกลบมาเขมทสด 2.1.6.2 B-Scan เปนจอเรดารใชอานระยะทาง และทศทาง มเสนกวาดทางแนวตงเรม
จากฐานลาง เรยกวา “Beam-Line” มความสวางคางบนจอนาน เสนกวาดแตละเสนคอ จ านวน Pulse ทสงออกไป การแสดงออกของเปาหมายบนจอเปนแบบ Intensity Modulation คอเมอสญญาณสะทอนกลบเขาเครองรบกจะถกขยายและปอนเขาบงคบความเขมของแสงทหนาจอ ต าแหนงของจดสวางทหนาจอจะแสดงวาเปาหมายอยดานซาย หรอดานขวาของเสนแนวตงตรงกลางจอ สวนสงของจดสวางหางจากฐานของ Beam-Line จะอานระยะทางของเปาหมาย การจบเปาหมายระยะใกล แลวการอานจากจอเรดารแบบ B-Scan จะไดรายละเอยดของเปาหมาย หลายๆเปา ไดดกวาจอเรดาร แบบ PPI 2.1.6.3 C-Scan เปนจอเรดารใชอานระยะทางและทศทาง มเสนกวาดทางแนวนอนมความสวางคางบนจอนาน เสนกวาดแตละเสนเปนจ านวน Pules ทสงออกไป การแสดงออกของเปาหมายบนจอเปน แบบ Intensity Modulation คอเมอมสญญาณสะทอนกลบมาเขาเครองรบกจะมจดเรองแสงหนาจอ พรอมทงแสดงทศทางตามแนวนอน และมมยกตามแนวตง ใชมากเปน Remote Control Indicator หรอจอเรดารควบคมการยงอาวธ 2.1.6.4 RHI หรอ E-Scan เปนจอเรดารใชอานระยะทาง (Range) และ ความสง(Height) ส าหรบชวยน าทางเครองบนรอนลงสนามในสภาพอากาศปด มความสวางคางบนจอ เสนกวาดกระดกขนลงทางดานขวามอ เสนกวาดแตละเสนเปนจ านวน Pulse ทสงออกไป การแสดงออกทหนาจอของเปาหมายเปนแบบ Intensity Modulation คอ เมอมสญญาณสะทอนกลบเขามา เขาเครองรบกจะมจดเรองแสงไปตามแนวเสนกวาด อานระยะทาง ตามแนวเสนกวาดทางแนวนอน และอานมมยกตามแนวตง
32
2.1.6.5 F-Scan หรอ Error Indicator ใชเปนเครองเรดารชวยการยงอาวธบนอากาศ ยาน มเสนตรงสองเสนตดกนตามแกน X และแกน Y จดสวางบนหนาจอคอ เปาหมายแสดงวาพลาดไปทาง ซาย-ขวา, บน หรอตรงกลางเปาหมายพอด จดสวางจะอยทจดตดของเสน X และ Y 2.1.6.6 G-Scan ดดแปลงมาจาก F-Scan เพยงแตเปาหมายมปกออกสองขาง ความยาวของปกทเปาหมายมากขน แสดงวาเปาหมายมระยะหางนอยลง เปนอตราสวนกลบกน 2.1.6.7 H-Scan ใชอานระยะทาง, ทศทาง และมมยก ระยะทางวดไปตามแนวตงของเสนกวาดไปมาทางแนวนอนคลาย B-Scan คลองจองกนกบกวาดไปมาของสายอากาศ จดสวางแฝด แสดงเปาหมาย จดซายบอกระยะทาง และทศทางของเปาหมาย จดขวาบอกมมเงย 2.1.6.8 I-Scan จอเรดารทใชรวมกนกบสายอากาศทกวาดเปนรปกรวยแหลมเปาหมายปรากฏเปนวงกลม แนวรศมจะบอกระยะทาง สวนทสวางจดของวงกลมจะบอกทศทาง 2.1.6.9 J-Scan ดดแปลงมาจาก A-Scan แตเสนกวาดจะหมนเปนวงกลมใกลขอบจอ แทนทจะกวาดไปตามแนวนอน ขอดกคอ ไดเสนกวาดยาวขน แมจะใชจอเรดารขนาดเลกกตาม เสนกวาดเกดจากการปอนคลนรป SINE ตางเฟสกน 90 องศา ท Vertical และ Horizontal Deflection Plate และคลนรป SINE นน จะตองควบคมความถใหคงททสด 2.1.6.10 K-Scan ดดแปลงมาจาก A-Scan สามารถอานระยะทางได แลวกยงอานทศทางได โดยใช Lope Switch ของสายอากาศ ท าใหเกด PIP คบนจอ ถาสญญาณจากสายอากาศซาย และขวาแรงเทา ๆกน แลว PIP ทงคจะทบกน แสดงวาเปาหมายอยตรงหนาพอด 2.1.6.11 L-Scan คลาย ๆกบ K-Scan ตางกนท PIP ของเปาหมายหนหลงชนกน 2.1.6.12 M-Scan ดดแปลงมาจาก A-Scan จดหรอชนบอกระยะทาง สอดใสไวในเสนกวาด เมอ PIP ของเปาหมาย และยอดแหลมบอกระยะทางตรงกน ระยะทางอาจอานไดจากเลขบวกหรอหนาปดบอกไวกได 2.1.6.13 N-Scan เปนการผสมกนระหวาง K-Scan และ M-Scan มยอดแหลมบอกระยะทางเหมอน M-Scan เพออานระยะทางไดถกตอง 2.1.6.14 PPI-Scan คอจอเรดารแบบ Plan Position Indicator สามารถอานระยะทางและทศทางสมพนธกบพนโลก สายอากาศจะหมนรอบตวกวาดดวยล าคลนแคบทางแนวราบและคลนกวางทางแนวตง ตลอดทางทกวาดคลนจะสง Pulse ออกอากาศจ านวนมาก เมอกระทบเปาหมายจะปรากฎทจอเรองแสงเปนเวลานาน
33
รปท 2.16 จอเรดารแบบตางๆ
34
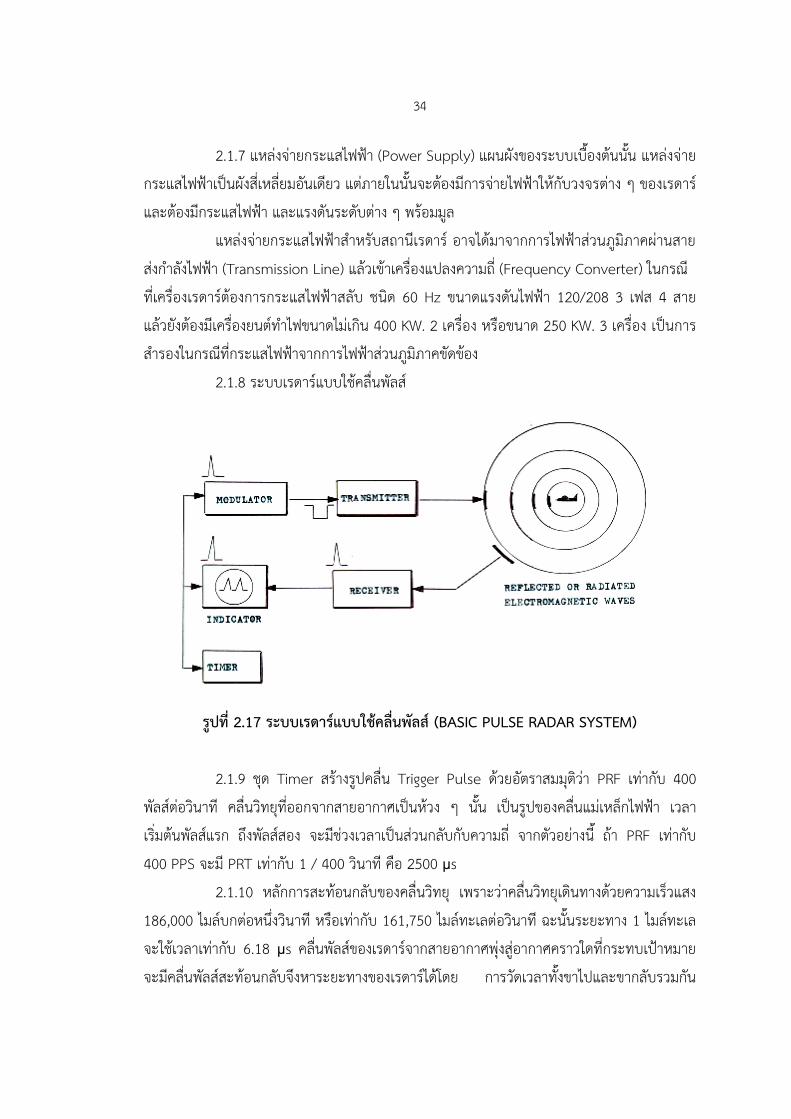
2.1.7 แหลงจายกระแสไฟฟา (Power Supply) แผนผงของระบบเบองตนนน แหลงจายกระแสไฟฟาเปนผงสเหลยมอนเดยว แตภายในนนจะตองมการจายไฟฟาใหกบวงจรตาง ๆ ของเรดาร และตองมกระแสไฟฟา และแรงดนระดบตาง ๆ พรอมมล แหลงจายกระแสไฟฟาส าหรบสถานเรดาร อาจไดมาจากการไฟฟาสวนภมภาคผานสายสงก าลงไฟฟา (Transmission Line) แลวเขาเครองแปลงความถ (Frequency Converter) ในกรณ ทเครองเรดารตองการกระแสไฟฟาสลบ ชนด 60 Hz ขนาดแรงดนไฟฟา 120/208 3 เฟส 4 สาย แลวยงตองมเครองยนตท าไฟขนาดไมเกน 400 KW. 2 เครอง หรอขนาด 250 KW. 3 เครอง เปนการส ารองในกรณทกระแสไฟฟาจากการไฟฟาสวนภมภาคขดของ 2.1.8 ระบบเรดารแบบใชคลนพลส
รปท 2.17 ระบบเรดารแบบใชคลนพลส (BASIC PULSE RADAR SYSTEM)
2.1.9 ชด Timer สรางรปคลน Trigger Pulse ดวยอตราสมมตวา PRF เทากบ 400 พลสตอวนาท คลนวทยทออกจากสายอากาศเปนหวง ๆ นน เปนรปของคลนแมเหลกไฟฟา เวลาเรมตนพลสแรก ถงพลสสอง จะมชวงเวลาเปนสวนกลบกบความถ จากตวอยางน ถา PRF เทากบ 400 PPS จะม PRT เทากบ 1 / 400 วนาท คอ 2500 μs 2.1.10 หลกการสะทอนกลบของคลนวทย เพราะวาคลนวทยเดนทางดวยความเรวแสง 186,000 ไมลบกตอหนงวนาท หรอเทากบ 161,750 ไมลทะเลตอวนาท ฉะนนระยะทาง 1 ไมลทะเลจะใชเวลาเทากบ 6.18 μs คลนพลสของเรดารจากสายอากาศพงสอากาศคราวใดทกระทบเปาหมายจะมคลนพลสสะทอนกลบจงหาระยะทางของเรดารไดโดย การวดเวลาทงขาไปและขากลบรวมกน
35
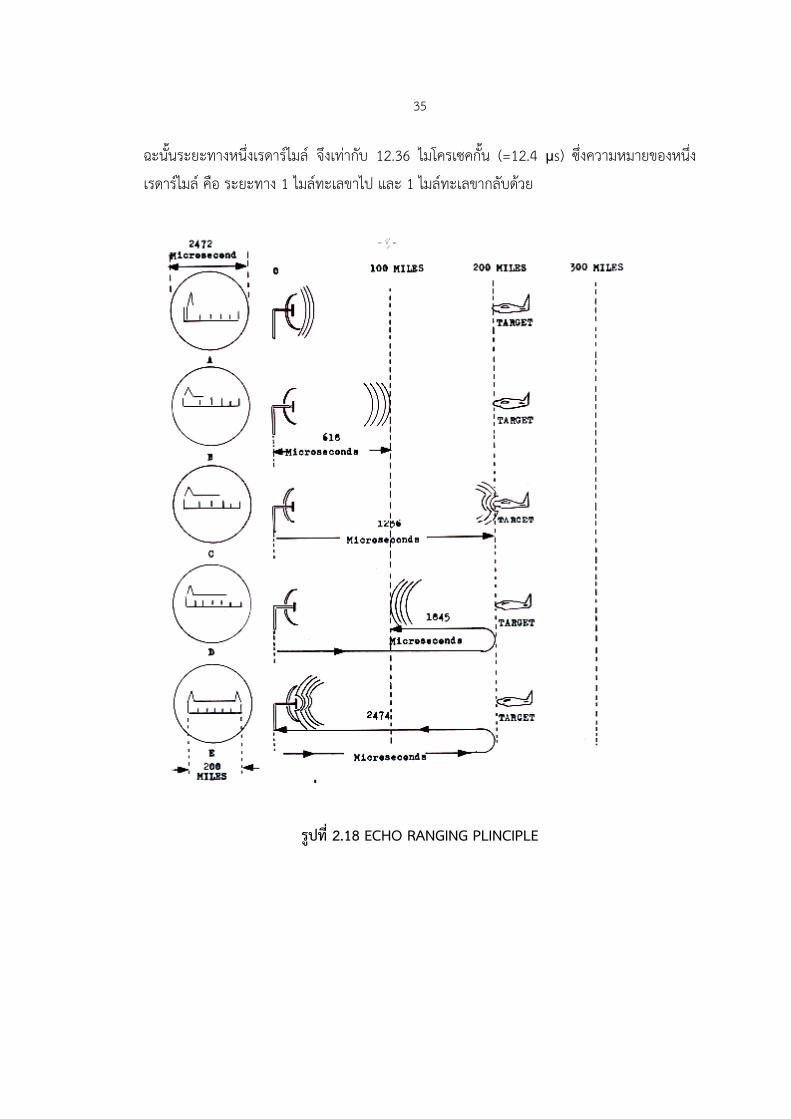
ฉะนนระยะทางหนงเรดารไมล จงเทากบ 12.36 ไมโครเซคกน (=12.4 μs) ซงความหมายของหนงเรดารไมล คอ ระยะทาง 1 ไมลทะเลขาไป และ 1 ไมลทะเลขากลบดวย
รปท 2.18 ECHO RANGING PLINCIPLE
36
จากรปท 2.17 และรปท 2.18 เมอสงพลสออกไป เรมตนภาพ Aใชเวลา 618 μs ไดระยะทาง 100 ไมล ซงเทากบครงทางไปสเปาหมายทหนาจอ เสนกวาดเคลอนทไปเศษ 1 สวน 4 ของระยะทางทงหมดในจอเรดาร ทจด C พลสเรดารกระทบเปาหมายทหาง 200 ไมล ใชเวลา 1236 μs ตอนนเสนกวาดหนาจอไปไดครงทางแลว คลนสะทอนกลบใชเวลา 1854 μs เสนกวาดไปไดเศษ 3 สวน 4 ของหนาจอ เมอคลนสะทอนกลบเขาสายอากาศรวมเวลาเปน 2474 μs เสนกวาดหนาจอจะสดทางพอด แลวกเรมสงพลสลกใหมออกไปอก รปดงกลาวแลวจงเปนเพยงการอธบายหลกการสะทอนกลบของคลนวทยเทานน 2.1.11 ประโยชน และการใชงานของเรดาร RADAR (RADIO DETECTION AND RANGING) ถาแปลตามความหมายของค าหมายถง สญญาณความถวทยทใชในการก าหนดต าแหนงทอย และระยะทางของเปาหมาย หรอกลาวไดวา เรดาร คอ อปกรณทใชตรวจจบเปาหมายโดยสามารถทจะทราบถง ความเรว, ความสง, ระยะทาง และทศทางของเปาหมายทตองการซงคณสมบตตาง ๆนจะขนอยกบการออกแบบ และจดประสงคในการใชงานซงจดแบงได 4 ลกษณะโดยทวๆ ไป คอ 2.1.11.1 พนสพน (Surface To Surface) จดประสงคสวนใหญใชในการตดตาม เปาหมาย และชต าแหนงของเปาหมายทอยภาคพน โดยอปกรณจะอยภาคพนเชนกน เชน ในระบบ DopplerRadar ทใชในกจการต ารวจส าหรบตรวจจบความเรวของยานพาหนะ หรอใชในการน ารอง และจดการจราจรทางน าใชตามเมองทาส าคญ ๆ ทมการจราจรทางน ามาก และใชในทรรศนะวสยไมดเรดารพนสพนน มขอเสยในดานระยะทางของเปาหมายจะถกจ ากดโดยพนผวของโลกเอง รวมถงสภาวะของภมประเทศโดยรอบดวย 2.1.11.2 พนสอากาศ (Surface To Air) ใชในการน ารองอากาศยาน (Air Surveillance Radar) โดยอาจจะกวาดสญญาณไปรอบๆ หรออาจใชตดตามบางตวโดยเฉพาะ นอกจากนยงใชตรวจสภาพอากาศ (Weather Radar), ใชจดการจราจรทางอากาศ (Air Traffic Control), ใชเปนเรดารแจงเตอน (Eary Warning Radar) จบเปาหมายอากาศยาน หรอจรวด, ใชชวยในการยงตอสปองกนภยทางอากาศ ซงเรดารระบบพนสอากาศนอาจตดตงพนดนบนภเขา หรอบนเรอกได แลวแตจดประสงค เนองจากระยะทางทเรดารจบไดนน เปนแนวเสนตรง ดงนนเรดารภาคพนสอากาศจงมขอจ ากด เชนเดยวกบระบบพนสพน แตจดไดวานอยกวามาก เพราะเปาหมายทตองการสวนใหญเปนอากาศยาน ผลกระทบทเกดขนโดยทวไปกจะเกดจากสภาพแวดลอมภมประเทศทอยใกล ๆ เปนสวนใหญ เชน ภเขา, ตกอาคาร, ตนไมตางๆ ซงจะปรากฏบนจอ Indicator ในทางเทคนค เราเรยกวาสงทเกดขนบน Indicator โดยสาเหตจากสงตาง ๆ เหลานเรยกวา “GROUND CLUTTER”
37
2.1.11.3 อากาศสอากาศ (Air To Air) ใชคนหา หรอตดตามเปาหมายทเปนอากาศยาน สภาพอากาศ หรอเปาหมายอนๆ ทอยบนอากาศยานดวยกน ซงกรวมถงการใชเปนเครองชวยทก าหนดหรอหลกเลยงการชนระหวางอากาศยานดวยกนเอง นอกจากนนยงใชในการตอส และโจมตเปาหมายบน อากาศยานดวย เรดารอากาศสอากาศน ยงอาจเพมเครองน าทาง (Guidance) เพอใหไดขอมล และทศทางของขาศก เพอชวยในการปองกนจรวดของขาศกทมงเขาหา หรอใชเปนเครองชวยชเปาหมายใหกบจรวดของฝายเดยวกน โดยมากจะเปนระบบ Pulse Doppler Radar 2.1.11.4 อากาศสพน (Air To Ground) ใชในการก าหนดเปาหมายภาคพน, ท าแผนท, หาความสงของอากาศยานเอง, ใชในการโจมตเปาหมายภาคพน, ใชก าหนดความความเรว ภาคพนของอากาศยาน (Ground Speed) เปน Side Looking ในการท าแผนททคอนขางละเอยด และเทยงตรง นอกจากนยงใชในการหลกเลยงการชนพนดน หรอหลงฟา (Terrain Clearance) ใชก าหนดขอมลใหอากาศยานอยในความสงคงท (Terrain Follow) ใหขอมลทงทางมมทศ และมมเงยใหอากาศยานเมอเปรยบเทยบกบภาคพน (Terrain Avoidance) เรดารไดน ามาใชงานหลายๆ ดาน ทงภาคพน ในอากาศ และในทะเล เรดารสวนใหญจะถกออกแบบเพอใชงานในกจการทหาร, ในดานการปองกน, แจงเตอน และเพอความปลอดภยสวนพลเรอนจะมใชในการชวยความปลอดภย เชน การจดการจราจรทางอากาศ, การรอนลงของอากาศยาน, การเดนเรอ เปนตน ขอยกตวอยางพอสงเขป ดงน - ATC. Radar (Airtraffic Control Radar) ใชควบคมการบน ชวยในความปลอดภยของอากาศยานโดยใหบนอยในเสนทางทก าหนด และควบคมการจราจร บรเวณใกลสนามบนทมการจราจรคบคง - GCA. Radar (Ground Control Appraoch Radar) ชวยในการรอนลงของอากาศยานในทรรศนะวสยไมด ซงกรวมถงระบบ Microwave Landing System และ ATE. Radar Beacon System ซงใชแทนกนไดในกรณเดยวกน - Aircraft Navigation ใชตรวจสอบสภาพอากาศเพอใชหลกเลยง หรออาจใชเปน Terrain Avoidance หรอ Terrain Follow และบางอยางทใชหลกการเดยวกนกบระบบเรดาร เชน Radio Altimeter ไมวาจะเปน FM / CW หรอ Pulse และ Doppler Navigation - Ship Safety ใชแจงเตอน และตรวจสอบชายฝง สงกดขวางตางๆ เชน ทน รวมถงเรอล าอน ๆ ดวย - Remote Sensing ใชในการสงสญญาณระยะไกล ซงอาจเปนขอมลสภาพอากาศ สภาพพนผวโลก เปนตน
38
- Law Enfourcement ใชในดานกฏหมาย เชน ใชจบความเรวของยานพาหนะหรอการบกรกสถานท เปนตน - Early Warning ใชแจงเตอนอากาศยานทรกล าแนวพรมแดน, จรวดน าวถของฝายขาศกทยงเขามาเพอเตรยมการปองกน หรอตอบโตไดทนทวงท 2.2 เรดาร DR-172 ADV (Doppler Radar 172 Air Defense Version) ศนยตอสปองกนภยทางอากาศกองทพบก ไดใหความหมายของเรดาร DR – 172 ADV ดงน (ศปภอ.ทบ. 2542 : 1-6)
1.กลาวทวไป เรดาร DR-172ADV ไดรบการจดหาและเขาประจ าการในกองทพบก ตงแตตนป พ.ศ.2524ซงยทโธปกรณหลกในหนวย ศปภอ.ทบ. 1 , 2 , 3 และ 4 เพอใชงานการคนหา , พสจนฝายและการตดตามเปาหมาย ตออากาศยานระดบต าโดยเรดารชนดน เปนของบรษท Daimler – Chrysler Aerospace ในส านกงาน Defense & Civil Systems ประเทศสหพนธรฐเยอรมน ลกษณะของเรดาร เปนแบบกงประจ าทสามารถเคลอนยายไดโดยการบรรทกบนยานพาหนะ ขนาด 7 ตน จ านวน 2 คน การท างานของเรดาร DR – 172 ADV เปนแบบอสระ (Stand Alone) โดยออกแบบมาเพอใชในการตรวจจบอากาศยานระกบต า (Low Level Radar) เพอทดแทนหรอเสรมชองวางจากขอจ ากดของเรดารตรวจการระยะไกลทใชในการตรวจจบอากาศยานระดบสง ซงถาจะกลาวถงหนาทของการปองกนภยทางอากาศทส าคญอนหนงกคอการด ารงไวซงการตรวจการทางอากาศจากระดบพนดนขนไปจนถงเพดานบนสงสดทเครองบนรบสมยใหมสามารถบนไดโดยไมถกรบกวนใดๆ ทงสน การตรวจการทางอากาศสามารท าไดโดยงายทความสงในระดบกลาง และระดบสงดวยการใชเรดารตรวจการระยะไกล แตกเกดขอจ ากดในการตรวจจบเปาหมายทอยใกลพนดนซงจะท าไดยากล าบากเนองจากสาเหตหลกๆ 2 ประเภทคอ 1.สญญาณสะทอนของเรดาร ทเกดจากสภาพแวดลอมตางๆ เชน พนดน , ทะเล, สงกอสราง, ฝน เปนตน ทเกดเพมขนบนจอภาพเรดาร ทเรยกวา สญญาณสะทอนทไมตองการ (Clutter) เหตนท าใหเปาหมาย (อากาศยาน) ไมสามรถมองเหนไดจากภาพจอเรดารทถกสญญาณสะทอนทไมตองการ (Clutter) บดบง 2.ความโคงของผวโลกท าไหการตรวจจบอากาศยานบนในระดบต าหลงเสนขอบฟาของเรดารระยะไกลไมสามารถท าได การเพมระยะท าการของเรดารจะท าใหชองวางระหวางเรดารและพนผวโลกมมากขน
39
จากสาเหตหลกทง 2 ประการ จงไดมการน าเรดารทมความสามารถในการเคลอนทและมระยะท าการในระยะใกลถงระยะปานกลาง มความสามารถในการตดสญญาณสะทอนทไมตองการ (Clutter) ตางๆ มาใชทดแทนจดอบของเรดารระยะไกล
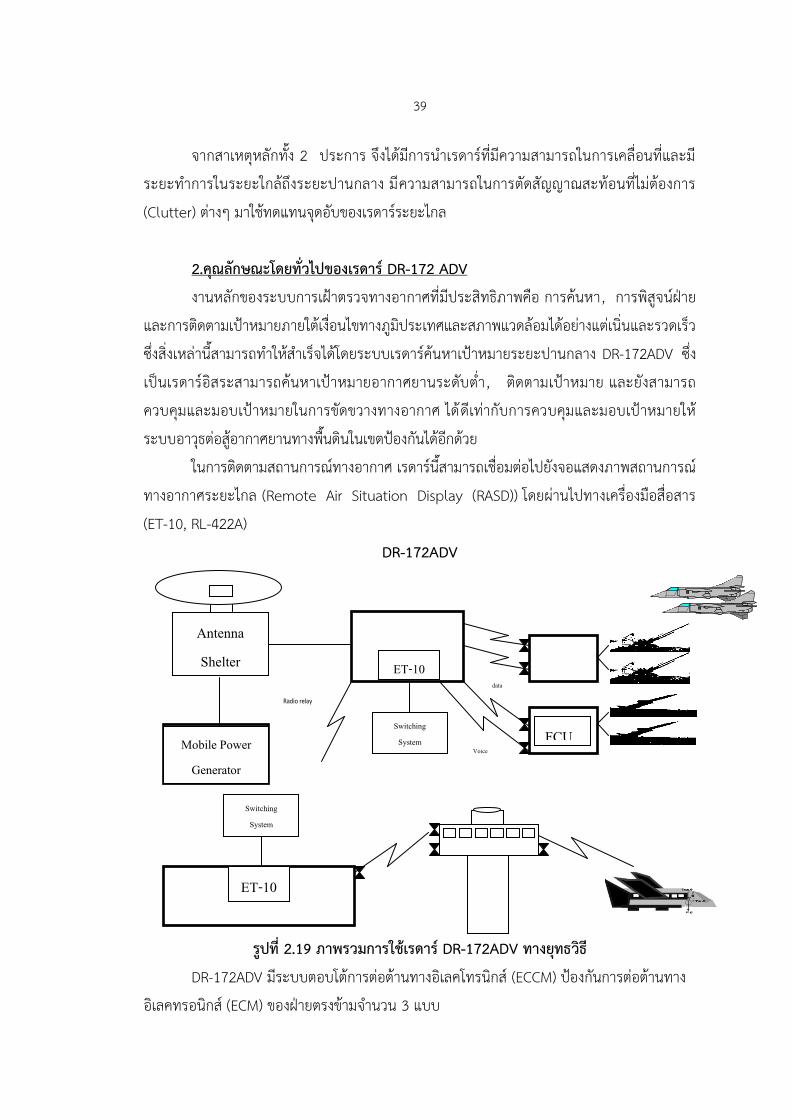
2.คณลกษณะโดยทวไปของเรดาร DR-172 ADV งานหลกของระบบการเฝาตรวจทางอากาศทมประสทธภาพคอ การคนหา , การพสจนฝายและการตดตามเปาหมายภายใตเงอนไขทางภมประเทศและสภาพแวดลอมไดอยางแตเนนและรวดเรวซงสงเหลานสามารถท าใหส าเรจไดโดยระบบเรดารคนหาเปาหมายระยะปานกลาง DR-172ADV ซงเปนเรดารอสระสามารถคนหาเปาหมายอากาศยานระดบต า , ตดตามเปาหมาย และยงสามารถควบคมและมอบเปาหมายในการขดขวางทางอากาศ ไดดเทากบการควบคมและมอบเปาหมายใหระบบอาวธตอสอากาศยานทางพนดนในเขตปองกนไดอกดวย ในการตดตามสถานการณทางอากาศ เรดารนสามารถเชอมตอไปยงจอแสดงภาพสถานการณทางอากาศระยะไกล (Remote Air Situation Display (RASD)) โดยผานไปทางเครองมอสอสาร (ET-10, RL-422A)
DR-172ADV
รปท 2.19 ภาพรวมการใชเรดาร DR-172ADV ทางยทธวธ DR-172ADV มระบบตอบโตการตอตานทางอเลคโทรนกส (ECCM) ปองกนการตอตานทางอเลคทรอนกส (ECM) ของฝายตรงขามจ านวน 3 แบบ
Antenna Shelter
Mobile Power Generator
ET-10
Switching System
ET-10
Switching System
FCU 2
Radio relay
data
Voice
40
1.ระบบแสดงความเขมและทศทางของการรบกวน (Amplitude versus Azimuth (AVA)) 2.ระบบตอตานการรบกวนยานความถแถบกวาง (Constant False Alarm Rate (CFAR))
3.ระบบตอตานการรบกวนแบบลกคลนทเปนจงหวะ (Pulse Length Discrimination (PLD)) การตดตอสอสารระหวางทตงเรดารกบหนวยควบคมการยง (Fire Control Unit (FCU)) ใช วทย UHF ในการตดตอทางค าพด (Voice) และ VHF ในการสงผานขอมล (Data link) สวนการตดตอกบจอแสดงภาพสถานการณทางอากาศระยะไกล (Remote Air Situation Display (RASD)) ใชการตดตอทางค าพด (Voice) และทางการสงผานขอมล (Data link) ผานเครองแปลงสญญาณขอมล (ET-10) และชดวทยถายทอด RL-422A ส าหรบการตดตอระหวางตแผงเสาอากาศ (Antenna Shelter) และตพนกงานเรดาร (Operator Shelter) ผานทางโทรศพทตดตอภาพในนนเอง 3.ระบบทางเครองกลและการเคลอนยาย ระบบเรดาร DR-172ADV ตดตงบนต (Shelter) 2 ต คอตแผงเสาอากาศ (Antenna Shelter (AS)) และตพนกงาน (Operator Shelter (OS)) ซงทง 2 ตมระบบปรบอากาศ (Air Cinditioned) อยางเพยงพอเครองก าเนดไฟฟาเคลอนท (Mobile Power Generator) สามารถผลตกระแสไฟฟากระแสสลบ (AC) เพอใชงานไดอยางโดยไมตองพงพาแหลงไฟฟากระแสสลบ (AC) ทอน รถบรรทกระบบเรดารประกอบดวย รถยนตบรรทก ขนาด 7 ตน แบบ Unimog U 2450L (6x6) จ านวน 2 คน บรรทกตแผงเสาอากาศ (Antenna Shelter) และรถพวงแผงเสาอากาศ จ านวน 1 คน ส าหรบรถยนตบรรทกอก 1 คน บรรทกตพนกงานเรดาร (Operator Shelter) และรถพวง เครองก าเนดไฟฟาเคลอนท (Mobile Power Generator) 4.ระบบเรดาร 4.1 ตแผงเสาอากาศ (Antenna Shelter (AS)) แผงอากาศของ ระบบเรดาร DR-172ADV ถกตดตงบนตแผงเสาอากาศ (Antenna Shelter) ซง ประกอบไปดวยสวนประกอบทส าคญคอ 4.1.1 ชดอปกรณเรดาร (Unit of pulse Doppler Radar) 4.1.2 อปกรณรบ-สง ระบบพสจนฝาย (IFF Interroogator RT-2000/7) 4.1.3 เครองมอก าหนดทศเหนอดวยไจไร (North seeking gyro) ระบบเรดาร DR-172ADV ปฏบตงานในระบบ 2 ความถ (Diversity Mode) ระยะท าการของระบบเรดาร (Instrumented Range) คอ 140 กม.ส าหรบเปาหมายทมพนทหนาตดขนาด 2 ตารางเมตร โดยเรดารนออกแบบเพอใชแสดงเฉพาะเปาหมายเคลอนท (MRI Radar) จงไมแสดงเปาหมายทอยกบทและเปาหมายเคลอนทชา เชน เมฆ, ยานพาหนะ เปนตน แตสามารถใชงาน
41
ในระบบการท างานแสดงผลทวไป (Mode Normal Video) เพอแสดงภาพของสญญาณสะทอนทไมตองการ (Clutter) ได 4.2 ตพนกงานเรดาร (Operator Shelter (OS)) ในตพนกงานเรดาร (Operator Shelter) ไดจดแผงควบคม (Console) ไว 3 แผง คอ
4.2.1 แผงควบคมพนกงานเรดาร (The radar Operator Console) กบ สวนประกอบ ของจอ PPI (Plan Position Indicator) ซงใชแสดงผลการตรวจจบเรดารและขอมลระบบพสจนฝาย(IFF) , แปนพมพส าหรบเรดาร , ระบบพสจนฝาย (IFF) , การประมวลผลขอมลเรดาร และ Rolling ball
4.2.2 แผงควบคมชดแสดงผลขอมล (The Computer Console) ซงแสดง สถานการณทางอากาศและพนดนโดนมสวนประกอบของเครองมอตางๆ เชน จอแสดงผล, แปนพมพ, อปกรณรบและแสดงผลค าสง (Alphanumeric Readout (ARO)) และ Rolling ball
4.2.3 แผงควบคมคอมพวเตอร (The Computer Console) ซงมระบบคอมพวเตอร SICOMP M 80 ตดตงอย โดยมสวนประกอบปลกยอยคอ จอแสดงผล, แปนพมพ, เครองพมพ เพอใชในการตรวจสอบการท างานของ SICIMP M 80 และปรบปรงระบบการท างานของ SICOMP M 80 (โดยชางซอม)
ตพนกงานเรดาร (Operator Shelter (OS)) มชดประมวลผลขอมลเรดาร (Radar Data Processor) เพอด าเนนการดงน
- การแยกขอมลสญญาลกษณแสดงขอมลเปาหมายประมวลผลขนตน (Plot) เพอแสดงมมภาคและระยะ -ความสมพนธของขอมลเรดารกบ ขอมลระบบพสจนฝาย (IFF) - การสงผานขาวสาร ไปยง SICOMP M 80 ชดประมวลผลขอมลเรดาร (The Radar Data Processor) ไดจดระบบการท างาน 3
แบบ (Mode) ในการทจะด าเนนการเพอใหไดขอมลใชงานของเรดาร 1.) ระบบท างานอตโนมต (Automatic mode): ในระบบการท างานนขอมลสญลกษณ
แสดงขอมลเปาหมายประมวลผลขนตน (Plot) ทงหมดจะถกแยกและด าเนนการโดยชดประมวลผลขอมลเรดาร (Radar data Processor) เพอทจะสงผานไปยง SICOMP M 80 ตอไป
2.) ระบบการท างานโดยพนกงานเรดาร (Manual Mode): ในระบบการท างานนขอมล สญลกษณแสดงขอมลเปาหมายประมวลผลขนตน (Plot) จะถกด าเนนการ โดยพนกงานเรดาร(Operator) ในการทจะเปลยนต าแหนงตางๆ โดยใช Rolling ball
3.) ระบบการท างานแบบผสม (Mixed Mode): เปนการด าเนนการแบบผสมโดยขอมล
42
ทตองการใชประโยชนจะถกด าเนนการอยางอตโนมต สวนขอมลทวไปจะด าเนนการโดยพนกงานเรดาร เพอทจะใสสญญาลกษณลงไป 5. COMPUTER SICOMP M 80 การประมวลผลเพอแสดงพนทภาพทางอากาศท เรดารกวาดจบมานน COMPUTER SICOMP M 80 จะจดการประมวลผลจากขอมลของเรดารทตรวจจบไดมาใชนอกจากนนยงสามารถมอบหมายเปาหมายใหเครองบนท าการขดขวางทางอากาศหรอการใชอาวธตอสอากาศยานภาคพนดนด าเนนการ การแสดงผลของขอมลสถานการณทางอากาศประกอบกดวย ขอมลทเรดารตรวจจบไดทยงไมไดประมวลผลและทประมวลผลแลว ไดแก สญลกษณแสดงแนวเคล อนทของเปาหมาย (Tracks) และสญลกษณ ตางๆ, แผนท, เสนและอกษรยอตางๆ ส าหรบต าแหนงตางๆ ของสญลกษณแสดงขอมลเปาหมายประมวลผลขนตน (Plot) จะสอดคลองกบขอมลต าแหนงทไดรบของเปาหมาย ขอมลสญลกษณแสดงขอมลเปาหมายประมวลผลขนตน (Plot) จะปรากฏการแสดงในลกษณะเปนสญลกษณในระยะเวลาสนของแตละรอบ การกวาดจบเรดาร ซงมลกษณะคลายกบการแสดงผลของจอแสดงผลในสถานเรดาร (Radar Site) ขอมลสญลกษณแสดงขอมลเปาหมายประมวลผลขนตน (Plot) จะถกประมวลผลโดยคอมพวเตอรในการท าใหเปนสญญาณดจตอล (Digital) และแปลงเปนสญลกษณแสดงแนวเคลอนทของเปาหมาย (Track) เพอแสดงผลใหไดเหน การแสดงผลเปนสญลกษณแสดงแนวเคลอนทของเปาหมาย (Track) จะประกอบดวยสเหลยมเลกๆ รอบต าแหนงของสญลกษณแสดงแนวเคลอนทของเปาหมาย (Track) ทไดจากการค านวณ สญลกษณเวคเตอร จะเปนตวบงบอกถง ความเรวและทศทางของเปาหมายและตวอกษรและตวเลขทตามมาไมเกน 5 ตวอกษรจะแสดงขอมลขาวสารทางยทธวธ ระบบคอมพวเตอรจะประมวลผลขอมลขาวสารทตองการอยางอตโนมตและด าเนนการตามหนาทดงน
- ความสมพนธของขอมลเรดารทเขามาถงและประมวลผลเพอใหได Track - การด าเนนการของขอมลปฏบตการทตองการในการเขาขดขวางของเครองบนและภารกจของหนวยอาวธภาคพน เชน ความเรว , ทศทางบน, ทศทางจากหนวยยง – เปาหมาย, ระยะทาง เปนตน - การประมวลผลตวแปรตางๆ (Parameters) ทเขามาในระบบ เชนเดยวกบการเตรยมการในการสงขอมลออกไปแสดงผลทอปกรณรบและแสดงผลค าสง (ARO (Alphanumeric Readout)) - การพมพแสดงผลของขาวสารของระบบและการรายงานทอปกรณควบคมและตรวจสอบการท างานของ SICOMP M 80
43
- เกบและแสดงผลของขอมลแผนท - การควบคมหนวยอาวธ 1-2 หนวยยง อกทงเตรยมการแจงเตอนและคดเลอกขอมลเปาหมาย ใหหนวยยงละไมเกน 5 เปาหมายโดนผานทางระบบวทย VHF - การเตรยมการในการสงผานขอมลไปยงเครองรบสงขอมลเปาหมายระยะไกล (Remote Target Data Terminal (RTDT)) จ านวน 2 หนวยระบบยง และไปยงจอแสดงภาพสถานการณทางอากาศระยะไกล (Remote Air Situation Display (RASD))
6. ชดเครองมอควบคมหนวยยงระยะไกล (Fire Control Unit (FCU)) หนวยในระบบอาวธจะถกตดตงดวยชดเคลอนยายซงบรรจเครองรบสงขอมลเปาหมายระยะไกล (Remote Target Data Terminal (RTDT)) ไว, เครองมอในการตดตอสอสาร (VHF/UHF) และแหลงจายพลงงานไฟฟาส าหรบ VHF/UHF และเครองรบสงขอมลเปาหมายระยะไกล (Remote Target Data Terminal (RTDT)) หนวยจายพลงงานสามารถจายพลงงานไดทแหลงจายพลงงานของหนวยอาวธ ทมหนวยจายไฟขนาด 230 V/50 Hz สวนการสงขอมลตางๆ ใหหนวยยง (ทงขอมลเปาหมายและค าสงยง) จะถกสงจาก DR-172ADVF โดยการผานขอมลทางชดวทย VHF 7. ชดเครองมอแสดงสถานการณทางอากาศระยะไกล (Remote Air Situation Display (RASD)) จอภาพสถานการณทางอากาศระยะไกล (Remote Air Situation Display (RASD)) ประกอบไปดวยหนวยประมวลผล , จอมอนเตอรสขนาด 19 นว, แปนพมพ และเมาส ภาพสถานการณจะถกสงขอมลจาก DR-172ADV โดย Computer SICOMP M 80 ผานเครองมอสอสาร (ET – 10, RT - 422) จอแสดงภาพสถานการณทางอากาศระยะไกล (Remote Air Situation Display (RASD)) จะแสดงขอมลของเปาหมายเชนเดยวกบจอแสดงภาพสถานการณทางอากาศ (Air Situation Display (ASD)) ซงตดตงอยในตพนกงานเรดาร (Operator Shelter) และสามารถเพมเตมสญลกษณตางๆลงในจอแสดงภาพสถานการณทางอากาศระยะไกล (RASD) ได เชน ทตงหนวยทหารและสถานทส าคญตางๆ
3. โปรแกรมทใชในการพฒนาระบบ
สมบต อยเมอง ไดใหความหมายของระบบสารสนเทศภมศาสตรดงน (2549 :1-7)
44
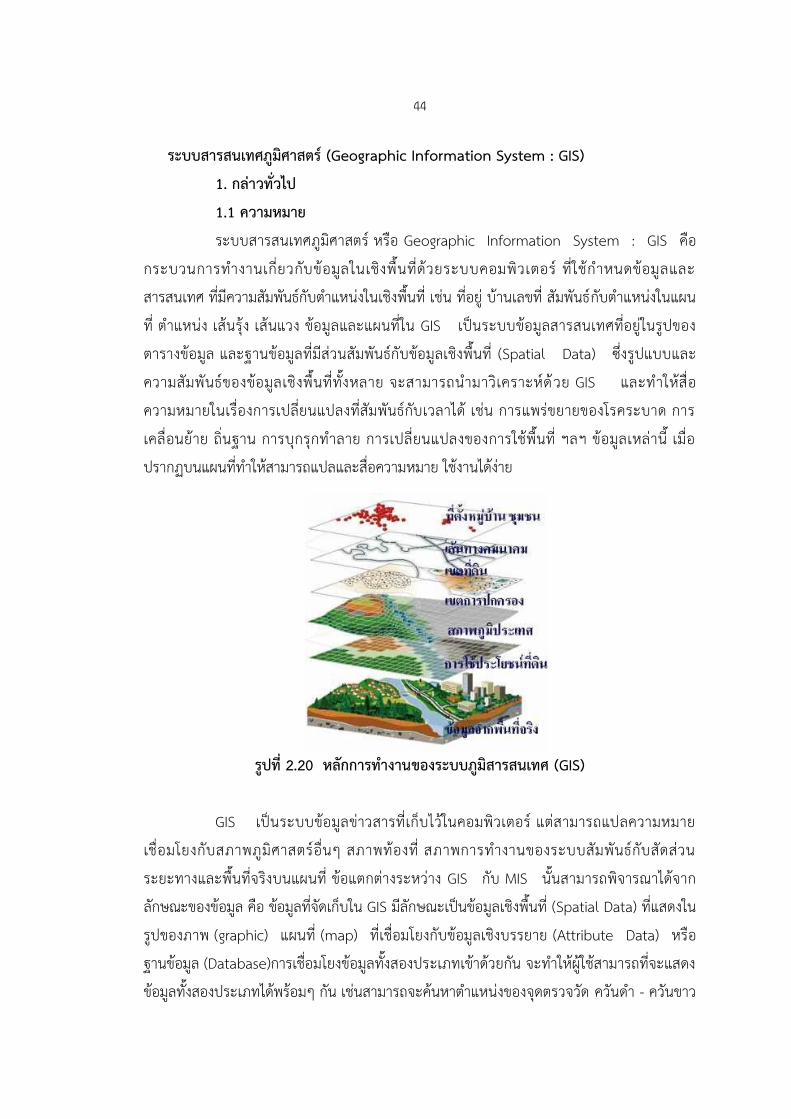
ระบบสารสนเทศภมศาสตร (Geographic Information System : GIS) 1. กลาวทวไป 1.1 ความหมาย ระบบสารสนเทศภมศาสตร หรอ Geographic Information System : GIS คอกระบวนการท างานเกยวกบขอมลในเชงพนทดวยระบบคอมพวเตอร ทใชก าหนดขอมลและสารสนเทศ ทมความสมพนธกบต าแหนงในเชงพนท เชน ทอย บานเลขท สมพนธกบต าแหนงในแผนท ต าแหนง เสนรง เสนแวง ขอมลและแผนทใน GIS เปนระบบขอมลสารสนเทศทอยในรปของตารางขอมล และฐานขอมลทมสวนสมพนธกบขอมลเชงพนท (Spatial Data) ซงรปแบบและความสมพนธของขอมลเชงพนททงหลาย จะสามารถน ามาวเคราะหด วย GIS และท าใหสอความหมายในเรองการเปลยนแปลงทสมพนธกบเวลาได เชน การแพรขยายของโรคระบาด การเคลอนยาย ถนฐาน การบกรกท าลาย การเปลยนแปลงของการใชพนท ฯลฯ ขอมลเหลาน เมอปรากฏบนแผนทท าใหสามารถแปลและสอความหมาย ใชงานไดงาย
รปท 2.20 หลกการท างานของระบบภมสารสนเทศ (GIS) GIS เปนระบบขอมลขาวสารทเกบไวในคอมพวเตอร แตสามารถแปลความหมายเชอมโยงกบสภาพภมศาสตรอนๆ สภาพทองท สภาพการท างานของระบบสมพนธกบสดสวนระยะทางและพนทจรงบนแผนท ขอแตกตางระหวาง GIS กบ MIS นนสามารถพจารณาไดจากลกษณะของขอมล คอ ขอมลทจดเกบใน GIS มลกษณะเปนขอมลเชงพนท (Spatial Data) ทแสดงในรปของภาพ (graphic) แผนท (map) ทเชอมโยงกบขอมลเชงบรรยาย (Attribute Data) หรอฐานขอมล (Database)การเชอมโยงขอมลทงสองประเภทเขาดวยกน จะท าใหผใชสามารถทจะแสดงขอมลทงสองประเภทไดพรอมๆ กน เชนสามารถจะคนหาต าแหนงของจดตรวจวด ควนด า - ควนขาว
45
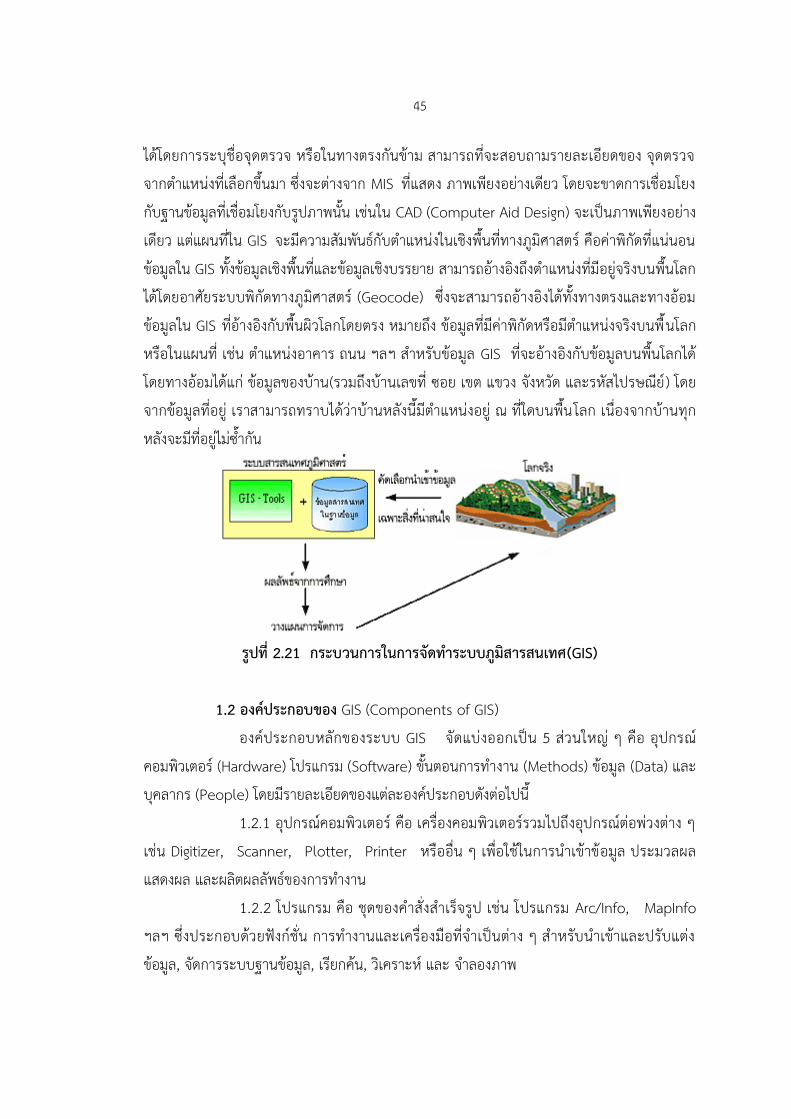
ไดโดยการระบชอจดตรวจ หรอในทางตรงกนขาม สามารถทจะสอบถามรายละเอยดของ จดตรวจจากต าแหนงทเลอกขนมา ซงจะตางจาก MIS ทแสดง ภาพเพยงอยางเดยว โดยจะขาดการเชอมโยงกบฐานขอมลทเชอมโยงกบรปภาพนน เชนใน CAD (Computer Aid Design) จะเปนภาพเพยงอยางเดยว แตแผนทใน GIS จะมความสมพนธกบต าแหนงในเชงพนททางภมศาสตร คอคาพกดทแนนอน ขอมลใน GIS ทงขอมลเชงพนทและขอมลเชงบรรยาย สามารถอางองถงต าแหนงทมอยจรงบนพนโลกไดโดยอาศยระบบพกดทางภมศาสตร (Geocode) ซงจะสามารถอางองไดทงทางตรงและทางออม ขอมลใน GIS ทอางองกบพนผวโลกโดยตรง หมายถง ขอมลทมคาพกดหรอมต าแหนงจรงบนพนโลกหรอในแผนท เชน ต าแหนงอาคาร ถนน ฯลฯ ส าหรบขอมล GIS ทจะอางองกบขอมลบนพนโลกไดโดยทางออมไดแก ขอมลของบาน(รวมถงบานเลขท ซอย เขต แขวง จงหวด และรหสไปรษณย ) โดยจากขอมลทอย เราสามารถทราบไดวาบานหลงนมต าแหนงอย ณ ทใดบนพนโลก เนองจากบานทกหลงจะมทอยไมซ ากน
รปท 2.21 กระบวนการในการจดท าระบบภมสารสนเทศ(GIS)
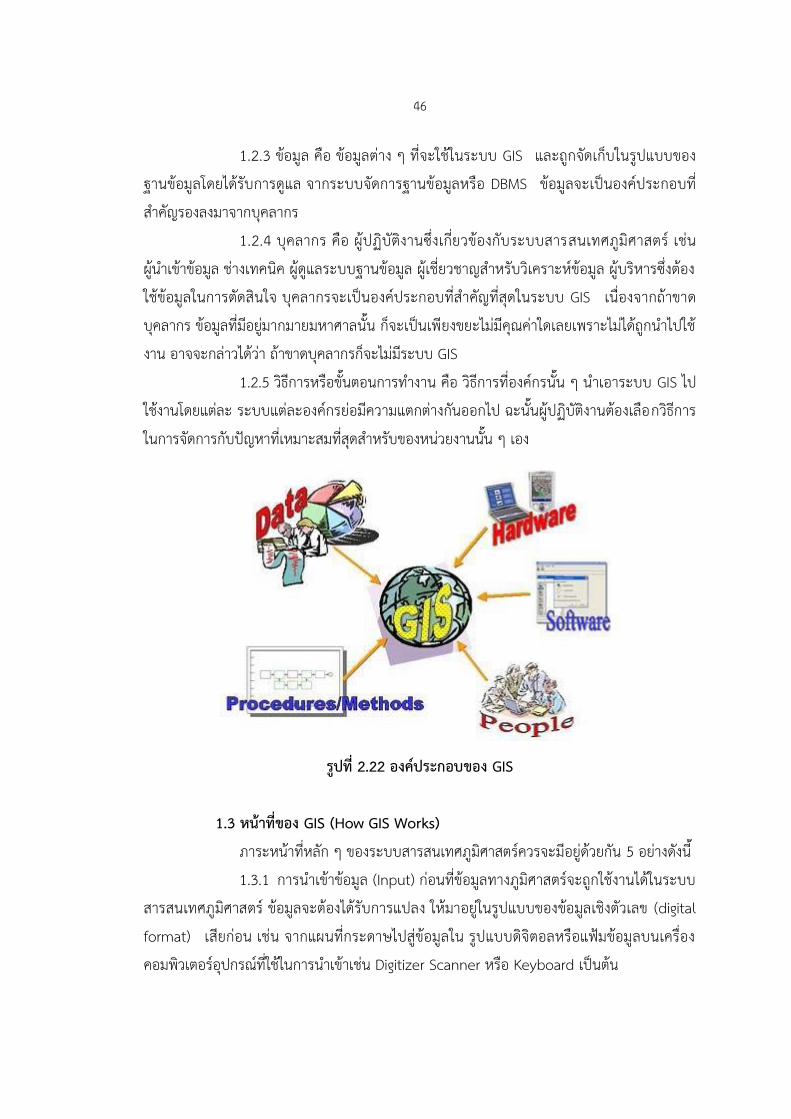
1.2 องคประกอบของ GIS (Components of GIS) องคประกอบหลกของระบบ GIS จดแบงออกเปน 5 สวนใหญ ๆ คอ อปกรณคอมพวเตอร (Hardware) โปรแกรม (Software) ขนตอนการท างาน (Methods) ขอมล (Data) และบคลากร (People) โดยมรายละเอยดของแตละองคประกอบดงตอไปน 1.2.1 อปกรณคอมพวเตอร คอ เครองคอมพวเตอรรวมไปถงอปกรณตอพวงตาง ๆ เชน Digitizer, Scanner, Plotter, Printer หรออน ๆ เพอใชในการน าเขาขอมล ประมวลผล แสดงผล และผลตผลลพธของการท างาน 1.2.2 โปรแกรม คอ ชดของค าสงส าเรจรป เชน โปรแกรม Arc/Info, MapInfo ฯลฯ ซงประกอบดวยฟงกชน การท างานและเครองมอทจ าเปนตาง ๆ ส าหรบน าเขาและปรบแตงขอมล, จดการระบบฐานขอมล, เรยกคน, วเคราะห และ จ าลองภาพ
46
1.2.3 ขอมล คอ ขอมลตาง ๆ ทจะใชในระบบ GIS และถกจดเกบในรปแบบของฐานขอมลโดยไดรบการดแล จากระบบจดการฐานขอมลหรอ DBMS ขอมลจะเปนองคประกอบทส าคญรองลงมาจากบคลากร 1.2.4 บคลากร คอ ผปฏบตงานซงเกยวของกบระบบสารสนเทศภมศาสตร เชน ผน าเขาขอมล ชางเทคนค ผดแลระบบฐานขอมล ผเชยวชาญส าหรบวเคราะหขอมล ผบรหารซงตองใชขอมลในการตดสนใจ บคลากรจะเปนองคประกอบทส าคญทสดในระบบ GIS เนองจากถาขาดบคลากร ขอมลทมอยมากมายมหาศาลนน กจะเปนเพยงขยะไมมคณคาใดเลยเพราะไมไดถกน าไปใชงาน อาจจะกลาวไดวา ถาขาดบคลากรกจะไมมระบบ GIS 1.2.5 วธการหรอขนตอนการท างาน คอ วธการทองคกรนน ๆ น าเอาระบบ GIS ไปใชงานโดยแตละ ระบบแตละองคกรยอมความแตกตางกนออกไป ฉะนนผปฏบตงานตองเลอกวธการในการจดการกบปญหาทเหมาะสมทสดส าหรบของหนวยงานนน ๆ เอง
รปท 2.22 องคประกอบของ GIS
1.3 หนาทของ GIS (How GIS Works) ภาระหนาทหลก ๆ ของระบบสารสนเทศภมศาสตรควรจะมอยดวยกน 5 อยางดงน 1.3.1 การน าเขาขอมล (Input) กอนทขอมลทางภมศาสตรจะถกใชงานไดในระบบสารสนเทศภมศาสตร ขอมลจะตองไดรบการแปลง ใหมาอยในรปแบบของขอมลเชงตวเลข (digital format) เสยกอน เชน จากแผนทกระดาษไปสขอมลใน รปแบบดจตอลหรอแฟมขอมลบนเครองคอมพวเตอรอปกรณทใชในการน าเขาเชน Digitizer Scanner หรอ Keyboard เปนตน
47
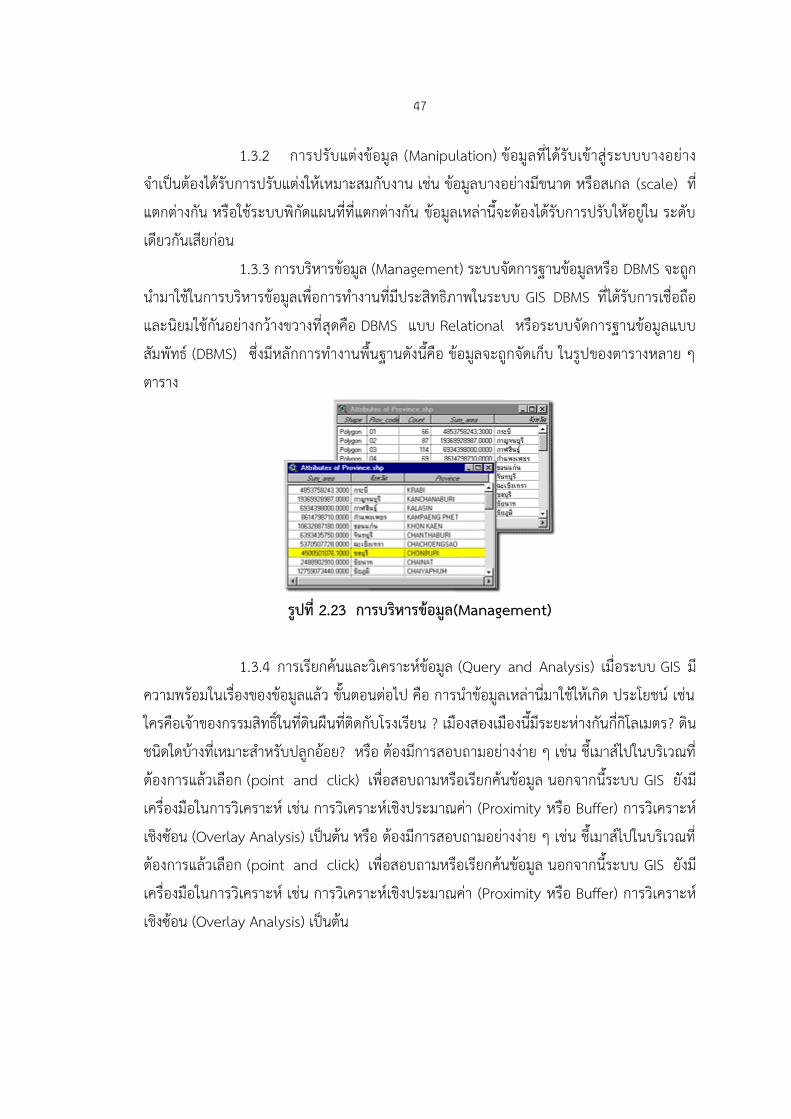
1.3.2 การปรบแตงขอมล (Manipulation) ขอมลทไดรบเขาสระบบบางอยางจ าเปนตองไดรบการปรบแตงใหเหมาะสมกบงาน เชน ขอมลบางอยางมขนาด หรอสเกล (scale) ทแตกตางกน หรอใชระบบพกดแผนททแตกตางกน ขอมลเหลานจะตองไดรบการปรบใหอยใน ระดบเดยวกนเสยกอน 1.3.3 การบรหารขอมล (Management) ระบบจดการฐานขอมลหรอ DBMS จะถกน ามาใชในการบรหารขอมลเพอการท างานทมประสทธภาพในระบบ GIS DBMS ทไดรบการเชอถอและนยมใชกนอยางกวางขวางทสดคอ DBMS แบบ Relational หรอระบบจดการฐานขอมลแบบสมพทธ (DBMS) ซงมหลกการท างานพนฐานดงนคอ ขอมลจะถกจดเกบ ในรปของตารางหลาย ๆ ตาราง
รปท 2.23 การบรหารขอมล(Management)
1.3.4 การเรยกคนและวเคราะหขอมล (Query and Analysis) เมอระบบ GIS มความพรอมในเรองของขอมลแลว ขนตอนตอไป คอ การน าขอมลเหลานมาใชใหเกด ประโยชน เชนใครคอเจาของกรรมสทธในทดนผนทตดกบโรงเรยน ? เมองสองเมองนมระยะหางกนกกโลเมตร? ดนชนดใดบางทเหมาะส าหรบปลกออย? หรอ ตองมการสอบถามอยางงาย ๆ เชน ชเมาสไปในบรเวณทตองการแลวเลอก (point and click) เพอสอบถามหรอเรยกคนขอมล นอกจากนระบบ GIS ยงมเครองมอในการวเคราะห เชน การวเคราะหเชงประมาณคา (Proximity หรอ Buffer) การวเคราะหเชงซอน (Overlay Analysis) เปนตน หรอ ตองมการสอบถามอยางงาย ๆ เชน ชเมาสไปในบรเวณทตองการแลวเลอก (point and click) เพอสอบถามหรอเรยกคนขอมล นอกจากนระบบ GIS ยงมเครองมอในการวเคราะห เชน การวเคราะหเชงประมาณคา (Proximity หรอ Buffer) การวเคราะหเชงซอน (Overlay Analysis) เปนตน
48
รปท 2.24 การเรยกคนและและวเคราะหขอมล
1.3.5 การน าเสนอขอมล (Visualization) จากการด าเนนการเรยกคนและวเคราะหขอมล ผลลพธทไดจะอยในรปของตวเลขหรอตวอกษร ซงยากตอการตความหมายหรอท าความเขาใจ การน าเสนอขอมลทด เชน การแสดงชารต (chart) แบบ 2 มต หรอ 3 มต รปภาพจากสถานทจรง ภาพเคลอนไหว แผนท หรอแมกระทงระบบมลตมเดยสอตาง ๆ เหลานจะท าใหผใชเขาใจความหมายและมองภาพของผลลพธทก าลงน าเสนอไดดยงขน อก ทงเปนการดงดดความสนใจของผฟงอกดวย
รปท 2.25 การน าเสนอขอมล (Visualization)
1.4 ลกษณะขอมลภมศาสตร (Geographic Features) 1.4.1 ปรากฏการณ หรอวตถตางๆ ทอยรอบๆ ตวเรา 1.4.1.1 สภาพแวดลอมทางธรรมชาต 1.4.1.2 สภาพแวดลอมทมนษยสรางขน 1.4.2 แสดงลงบนแผนท ดวย 1.4.2.1 จด (Point) 1.4.2.2 เสน (line) 1.4.2.3 พนท (Area หรอ Polygon) 1.4.2.4 ตวอกษร (Text) 1.4.3 อธบายลกษณะสงทปรากฏ ดวย 1.4.3.1 ส (Color) 1.4.3.2 สญลกษณ (Symbol) 1.4.3.3 ขอความบรรยาย (Annotation)
49
1.4.4 ทตง (Location) ลกษณะขอมลภมศาสตรจะตองแสดงถงทตงทางภมศาสตรและทตงสมพนธของสถานทหรอสงตางๆ บนโลก 1.5 แผนท และ ขอมลเชงพนท 1.5.1 แผนท คอ สงทแสดงลกษณะของผวโลก ทงทเปนอยตามธรรมชาตและทมนษยสรางขนโดยแสดงลงบนพนราบ อาศยการยอสวนใหเลกลงตามขนาดทตองการและใชเครองหมายหรอสญลกษณแทนสงทปรากฏอยบนผวโลก 1.5.2 ขอมลเชงพนท (Spatial data) มสวนประกอบ 2 สวน คอ 1.5.2.1 ขอมลเชงภาพ (Graphic data) สามารถแทนไดดวย 2 รปแบบพนฐาน 1.5.2.1.1 ขอมลแบบเวกเตอร (Vector format) 1.5.2.1.2 ขอมลแบบแรสเตอร (Raster format) 1.5.2.2 ขอมลอรรถาธบาย (Attribute data) เปนขอความอธบายทมความสมพนธกบขอมลเชงภาพเหลานน เชน ชอถนน, ลกษณะ, พนผวและจ านวนชองทางวงของเสนถนนแตละเสน เปนตน 1.6 ลกษณะขอมลในระบบสารสนเทศภมศาสตร โลกมความสลบซบซอนมากเกนกวาทจะเกบขอมลทงหมดเกยวกบโลกไวในรปขอมลดวยระบบคอมพวเตอร จงตองเปลยนปรากฏการณบนผวโลกจดเกบในรปของตวเลขเชงรหส (digital form) โดยแทนปรากฏการณเหลานนดวยลกษณะทางภมศาสตรทเรยกวา Feature ประเภทของ Feature ลกษณะทางภมศาสตรทเปนตวแทนของปรากฏการณทางภมศาสตรบนโลกแผนทกระดาษบนทกต าแหนงทางภมศาสตรและแทนสงตางๆ บนโลกทเปนลายเสนและพนทดวยสญลกษณแบบ จด เสน พนทและตวอกษร ในระบบสารสนเทศภมศาสตรจะใช feature ประเภทตางๆ ในการแทนปรากฏการณโดยแบงออกเปน 3 กลม ดงน 1.6.1 จด (Point) ลกษณะทางภมศาสตรทมต าแหนงทตงเฉพาะเจาะจง หรอมเพยงอยางเดยว สามารถแทนไดดวยจด (Point Feature) - หมดหลกเขต - บอน า - จดชมวว - จดความสง - อาคาร ตก สงกอสราง
50
ขอพจารณาเกยวกบมาตราสวน มาตราสวนแผนทจะเปนตวก าหนดวาจะแทนปรากฏการณบนโลกดวยจดหรอไม ตวอยางลกษณะทางภมศาสตรทเปนจด ตวอยางเชน บนแผนทโลก มาตราสวนเลกจะแทนคาทตงของเมองดวยจด แมวาในความเปนจรงเมองนนจะครอบคลมพนทจ านวนหนงกตาม ในขณะเดยวกนบนแผนทมาตราสวนทใหญขนเมองดงกลาวจะปรากฏเปนพนทและแตละอาคารจะถกแทนคาดวยจด ขอมลคาพกดของจด - คาพกด x, y 1 ค แทนต าแหนงของจด - ไมมความยาวหรอพนท 1.6.2 เสน (Arc) ลกษณะทางภมศาสตรทวางตวไปตามทางระหวางจด 2 จด จะแทนดวยเสน (Arc Feature) ตวอยางลกษณะทางภมศาสตรทเปนเสน - ล าน า - ถนน - โครงขายสาธารณปโภค - เสนชนความสง ขอจ ากดเกยวกบ Arc Arc 1 เสน ม Vertex ไดไมเกน 500 Vertex โดย vertex ล าดบท 500 จะเปลยนเปน node และเรมตน เสนใหมดวยการ identifier คาใหมโดยอตโนมต ขอมลคาพกดของ Arc - Vertex (คาพกด x, y คหนงบน arc) เปนตวก าหนดรปรางของ arc - arc หนงเสนเรมตนและจบลงดาน Node - arc ทตดกนจะเชอมตอกนท Node - ความยาวของ arc ก าหนดโดยระบบคาพกด 1.6.3 พนท (Polygon) ลกษณะทางภมศาสตรทมพนทเดยวกนจะถกลอมรอบดวยเสนเพอแสดงขอบเขต ตวอยางขอมลทเปนพนท - เขตต าบล อ าเภอ จงหวด - ขอบเขตอทยานแหงชาต - เขตน าทวม ขอพจารณาเกยวกบมาตราสวน
51
มาตราส วนของแหล งท มาของขอมลจะเปนต วก าหนดการแทนปรากฏการณบนโลกแหงความเปนจรงดวย point หรอ polygon ตวอยาง เชน อาคารบนมาตราสวนขนาดใหญ เชน 1 : 4,000 เปน polygon ทถกก าหนดขน โดยขอบเขตอาคาร บนแผนท 1 : 50,000 ทมาตราสวนเลก อาคารจะแสดงดวยจด ขอมลคาพกดของ Polygon - polygon จะประกอบดวย arc ตงแต 1 เสนขนไป แตม 1 Label point - ม Label point 1 point อยภายในพนทปดและใชในการแยกแยะแตละ polygon ออกจากกน 1.7 เทคนคและวธการน าเขาขอมล การน าเขาขอมล (Input data) เปนกระบวนการบนทกขอมลเขาสคอมพวเตอร การสรางฐานขอมลทละเอยด ถกตอง เปนสงส าคญอยางยงในการปฏบตงานดวยระบบสารสนเทศภมศาสตรซงจ าเปนตองมการประเมนคณภาพขอมล ทจะน าเขาสระบบในเรองแหลงทมาของขอมล วธการส ารวจขอมลมาตราสวนของแผนท ความถกตอง ความละเอยด พนททขอมลครอบคลมถงและปทจดท าขอมล เพอประเมนคณภาพ และคกเลอกขอมลทจะน าเขาสระบบฐานขอมล 1.7.1 การน าเขาขอมลเชงพนท ส าหรบขนตอนการน าเขาขอมลเชงพนทอาจท าไดหลายวธ แตทนยมท ากนในปจจบนไดแก การดจไทซ (Digitize) และการกวาดตรวจ (Scan) ซงทง 2 วธตางกมขอด และขอดอยตางกนไปกลาวคอการน าเขาขอมลโดยวธกวาดตรวจจะมความรวดเรวและ ถกตองมากกวาวธการเขาขอมลแผนทโดยโตะดจไทซและเหมาะส าหรบงานทมปรมาณมาก แตการน าเขาขอมลโดยการดจไทซจะสนเปลองคาใชจายนอยกวาและเหมาะส าหรบงานทมปรมาณนอย การใชเครองอานพกด (Digitizer) เปนการแปลงขอมลเขาสระบบโดยน าแผนทมาตรงบนโตะ และก าหนดจดอางอง (control point) อยางนอยจ านวน 4 จด แลวน าตวชต าแหนง (Cursor) ลากไปตามเสนของรายละเอยดบนแผนท การใชเครองกวาดภาพ (Scanner) เปนเครองมอทวดความเขมของแสงทสะทอนจากลายเสนบนแผนท ผลลพธเปนขอมลในรปแบบแรสเตอร (raster format) ซงเกบขอมลในรปของตารางกรดสเหลยม (pixel) คาความคมชดหรอความละเอยดมหนวยวดเปน DPI : dot per inch แลวท าการแปลงขอมลแรสเตอร เปนขอมลเวกเตอร ทเรยกวา Raster to Vecter conversion ดวยโปรแกรม GEOVEC for Microstation หรอ R2V
52
1.7.2 การน าเขาขอมลเชงบรรยาย ขอมลเชงบรรยายทจ าแนกและจดหมวดหมแลว น าเขาสระบบฐานขอมลดวยแปนพมพ (Keyboard) ส าหรบโปรแกรม PC ARC/Info จะจดเกบขอมลในรปแบบของ dBASE ดวยค าสง Tables สวนโปรแกรมจดการฐานขอมลแบบ Relational data base ทวๆ ไปบนเครอง PC เชน Foxpro, Access หรอ Excel จ าเปนตองแปลงขอมลใหเขาอยในรปของ DBF file กอนการน าเขาส PC ARC/Info
3. โปรแกรมทใชในการพฒนาระบบ ผวจยไดศกษาทฤษฏจากเอกสาร และโปรแกรมทเกยวของเพอน ามาเปนขอมลประกอบใน
การด าเนนการวจย โดยแบงออกเปน 2 โปรแกรม คอ 3.1 โปรแกรม NASA World Wind 3.2 โปรแกรม Eclipse
กรมชลประทาน กระทรวงเกษตรและสหกรณ ไดใหความหมายโปรแกรม NASA World Wind ดงน (ส านกชลประทานท 4 : 1-3)
3.1 โปรแกรม NASA World Wind NASA World Wind เปนโปรแกรมสารสนเทศภมศาสตรทออกแบบและพฒนาโดย องคการ
บรหารการบนและอวกาศแหงชาต (NASA) และสมาคมนกพฒนาโปรแกรมอสระ ใชงานกบเครองคอมพวเตอรสวนบคคล เปนโปรแกรมระบบเปด (Open Source) ซงบคคลทวไปสามารถน าไปพฒนาตอไดโปรแกรมรนเกาท างานบนระบบปฏบตการไมโครซอฟทวนโดว (Microsoft Windows) แตในปจจบนสามารถท างานบนโปรแกรมจาวา (JAVA) ภายใตชอ World Wind JAVA
NASA World Wind เปนโปรแกรมทมคณลกษณะคลายกบ Google Maps หรอ Google Earth แต NASA World Wind เปนโปรแกรมฟรและรหสเปด มขดความสามารถและมขอมลเชงวทยาศาสตรประยกตมากกวา
NASA World Wind ถกพฒนาและน ามาใชครงแรกเมอป ค.ศ. 2004 โดยองคการบรหารการบนและอวกาศแหงชาต (NASA) ปจจบนพฒนาเปนรนท 1.4 (World Wind 1.4) สามารถแสดงพนทสวนตาง ๆบนโลกแบบ 3 มต ขอมลแผนทมทงระบบขอมลกายภาพ สงแวดลอม ลมฟาอากาศ ขอมลจากระบบเตอนธรณพบตภยในอดตจวบจนถงเวลาปจจบน รวมทงแสดงพนทบนดวงจนทร ดาวองคาร ดาวเสาร และอน ๆ ซงสามารถเลอกไดจากเมนในโปรแกรม ผใชงานสามารถทจะท างานกบโปรแกรมโดยการหมน เอยง ยอ ขยายพนทบนลกโลก แสดงชอสถานทตงประมาณ 5 ลานชอ
53
ขอบเขตภมประเทศ เสนละตจด ลองจจด และขอมลอน ๆ NASA World Wind มความสามารถทจะคนหาขอมลสารสนเทศภมศาสตรจากเครองเซรฟเวอรในระบบ Internet โดยใชเครองมอ OGC’s (Open Geospatial Consortium) และ WMS (Web Map Service) NASA World Wind 1.4 สามารถใช WFS (Web Feature Service) ส าหรบดาวนโหลดชอสถานทตง น าเขาไฟลขอมลแบบ ESRI เชฟไฟล และไฟลขอมลแบบ kml/kmz ซงเปนตวอยางเบองตนท NASA World Wind สามารถท าได
คณลกษณะอกแบบหนงของ NASA World Wind สนบสนน .X ระบบโครงขาย DirectX 3Dสามารถจ าลองปรากฏการณทองฟา (scattering) และแสงเงา (sun shading) จากดวงอาทตยแบบโลกเสมอนจรง ความละเอยดของภาพถายดาวเทยมพนทบรเวณประเทศสหรฐอเมรกาเปนภาพถายดาวเทยมความละเอยดสง สามารถแสดงอาคาร บานเรอน รถยนต (USGS Digital Ortho Layer) ความละเอยดของภาพนอกประเทศสหรฐอเมรกา 15 ตารางเมตร/พกเซล และไมโครซอรฟ อนญาตให NASA World Wind สามารถน าภาพถายดาวเทยมความละเอยดสง (Virtual Earth) มาใชงานรวมกนโดยไมคดคาใชจาย
โปรแกรม NASA World Wind สามารถดาวนโหลดและตดตงไดจากเวปไซด http://worldwind.arc.nasa.gov/download.html แสดงดงรปท 2.26
รปท 2.26 แสดงเวปไซดดาวนโหลดโปรแกรม NASA World Wind
54
ความตองการของโปรแกรม 1. ระบบปฏบตการ Windows 2000 หรอ XP 2. ซพย Intel Pentium 3, 1 GHz หรอ AMD Athlon หรอสงกวา 3. หนวยความจ าระบบ 256 เมกะไบต (แนะน าท 1 กกกะไบต) 4. กราฟกการดรองรบการท างาน 3D สามารถสบคนรายการกราฟกการดทสามารถ
ท างานไดเทยบเทาจากเวปไซด http://worldwindcentral.com/wiki/Video_Card_Compatibility 5. ความเรวของเนทเวรคแบบ DSL หรอสงกวา 6. เนอทวางของฮารดดสต 2 GB
Eclipse ไดใหความหมายของโปรแกรม Eclipse ดงน (http://www.mindphp.com 2555 : 1) 3.2 โปรแกรม Eclipse Eclipse คอโปรแกรมทใชส าหรบพฒนาภาษา Java ซงโปรแกรม Eclipse เปนโปรแกรม
หนงทใชในการพฒนา Application Server ไดอยางมประสทธภาพ และเนองจาก Eclipse เปนซอฟตแวร OpenSource ทพฒนาขนเพอใชโดยนกพฒนาเอง ท าใหความกาวหนาในการพฒนาของ Eclipse เปนไปอยางตอเนองและรวดเรว
Eclipse มองคประกอบหลกทเรยกวา Eclipse Platform ซงใหบรการพนฐานหลกส าหรบรวบรวมเครองมอตางๆจากภายนอกใหสามารถเขามาท างานรวมกนในสภาพแวดลอมเดยวกน และมองคประกอบทเรยกวา Plug-in Development Environment (PDE) ซงใชในการเพมความสามารถในการพฒนาซอฟตแวรมากขน เครองมอภายนอกจะถกพฒนาในรปแบบทเรยกวา Eclipse plug-ins ดงนนหากตองการให Eclipse ท างานใดเพมเตม กเพยงแตพฒนา plugin ส าหรบงานนนขนมา และน า Plug-in นนมาตดตงเพมเตมใหกบ Eclipse ทมอยเทานน Eclipse Plug-in ทมมาพรอมกบ Eclipse เมอเรา download มาครงแรกกคอองคประกอบทเรยกวา Java Development Toolkit (JDT) ซงเปนเครองมอในการเขยนและ Debug โปรแกรมภาษา Java
ขอดของโปรแกรม Eclipse คอ ตดตงงาย สามารถใชไดกบ J2SDK ไดทกเวอรชน รองรบภาษาตางประเทศอกหลายภาษา ม plugin ทใชเสรมประสทธภาพของโปรแกรม สามารถท างานไดกบไฟลหลายชนด เชน HTML, Java, C, JSP, EJB, XML และ GIF ใชงานไดกบระบบปฏบตการ Windows, Linux และ Mac OS
สรป ในการพฒนาโปรแกรมของระบบแจงเตอนภยทางอากาศทดนน ควรจะเปนโปรแกรมในลกษณะ OpenSource สามารถท างานไดกบไฟลหลายๆชนด เพอทจะรองรบการพฒนาตอไปไดในอนาคต บคลากรภายในกองทพสามารถพฒนาเพมขดความสามารถใหกบยทโธปกรณทมใชอย ดวยตนเอง โดยไมตองจดหายทโธปกรณใหมขนมาทดแทน ซงเปนการประหยดงบประมาณ และเปนการปฏบตตามนโยบายของกองทพบกอกดวย
55
รปท 2.27 โปรแกรม Eclipse
รปท 2.28 ตวอยางโปรแกรม Eclipse
4. งานวจยทเกยวของ 4.1 วทยานพนธเรองการพฒนาระบบประเมนภยคกคามจากขอมลตดตามอากาศยาน 4.2 หลกนยม นปอ. 4.3 ต าราวชา ปตอ. ของ รร.ป.ศป. 4.4 ต ารา รส. 44-200 แนวทางการปฏบตงานของหนวยในระบบควบคมและแจงเตอน


















