The future development of social robots
68
1 SOCIALE ROBOTTER EN ETISK- OG TEKNOLOGISK ANALYSE AF SOCIALE ROBOTTER I PLEJESEKTOREN, MED ROBOT- SÆLEN PARO SOM CASE HUMTEK, 2. SEMESTERPROJEKT RUNE WEISE KOFOED JANNIK IUEL KRARUP RASMUS CHRISTIAN JØRGENSEN NICKLAS SKOV PAPE
-
Upload
nicklas-skov-pape -
Category
Documents
-
view
231 -
download
0
description
The aim of this project is to identify and discuss some of the reflections needed in the future development of social robots for people with dementia. Based on the theory Social Construction of Technology(SCOT) the project shows how Paro can be seen as a social construction. Further the project looks into ethical and moral issues in implementation of the social robot based on theory from the ethical philosophy, Utilitarianism. The project concludes that it is important to understand the requirements of the end-user and the relevant social groups and how these requirements arise from the specific understanding of the technology in the development of social robots for people with dementia. The report also concludes, there are positive and negative ethical and moral implications, due to the implementation of Paro, and these need to be part of the reflections and considerations in the future development of social robots for people with dementia.
Transcript of The future development of social robots

1
SOCIALEROBOTTER
EN ETISK- OG TEKNOLOGISK ANALYSE AF SOCIALE ROBOTTER I
PLEJESEKTOREN, MED ROBOT- SÆLEN PARO SOM CASE
HUMTEK, 2. SEMESTERPROJEKTRUNE WEISE KOFOEDJANNIK IUEL KRARUPRASMUS CHRISTIAN JØRGENSENNICKLAS SKOV PAPE


OVERVEJELSER TIL FREMTIDIG UDVIKLING AF SOCIALE ROBOTTER TIL DEMENTE
Version 1 til aflevering – 30. marts 2012Hus 08.1 Grp. 1HumTek, Roskilde Universitet, 2. semesterVejleder Jesper Jørgensen 2012 © Nicklas Skov Pape, Rune Weise Kofoed, Rasmus Christian Jørgensen og Jannik Iuel Krarup 2012 © Layout og figur-illustrationer af Nicklas Skov Pape
© Fotos fra filmen ”Mechanical Love”, Henninglarsen.com og AIST Japan Printed in Prinfo Paritas Digital Service43,5 sider (2400 tegn)104.515 tegn inklusiv mellemrum

4
FORORD
Tak til Lone Gaedt og Karsten Ahrentsen fra Teknologisk Institut.
Tak til plejere, beboere og ledere på Plejehjemmet Højdevang og tak til Charlotte Rugh, Bodil Fabricius og Lone Birk for deres tid og hjælpsomhed. Tak til Jesper Jørgensen for engageret vejledning gennem projektforløbet. Tak til Ulla Andersen og Ole Hansen for lån af det lille hyggelige kolonihavehus, derbogstaveligt talt skabte rammerne om hele rapporten.

5
ABSTRACT
The aim of this project is to identify and discuss some of the reflections needed in the fu-ture development of social robots for people with dementia. Based on the theory Social Construction of Technology(SCOT) the project shows how Paro can be seen as a social construction. Further the project looks into ethical and moral issues in implementation of the social robot based on theory from the ethical philosophy, Utilitarianism. The pro-ject concludes that it is important to understand the requirements of the end-user and the relevant social groups and how these requirements arise from the specific understan-ding of the technology in the development of social robots for people with dementia. The report also concludes, there are positive and negative ethical and moral implications, due to the implementation of Paro, and these need to be part of the reflections and con-siderations in the future development of social robots for people with dementia.
RESUMÉ
Formålet med dette projekt er at identificere og diskutere nogle af de refleksioner, der er nødvendige at gøre i den fremtidige udvikling af sociale robotter for borgere med demens. Baseret på teorien Social Construction of Technology (SCOT), viser projektet hvordan Paro kan ses som en social konstruktion. Yderligere belyser projektet etiske og moralske spørgsmål, i forbindelse med implementeringen af den sociale robot, baseret på moralfilosofien – utilitarismen. Projektet konkluderer at det i udviklingen af sociale robotter til borgere med demens, er vigtigt at forstå de krav som slutbrugeren og de re-levante sociale grupper stiller teknologien, og hvordan disse krav udspringer fra slutbru-gerens og de relevante sociale gruppers forståelsesramme af teknologien. Rapporten kon-kluderer endvidere at der er positive og negative etiske og moralske konsekvenser som følge af implementeringen af Paro, og at disse i høj grad skal være en del af overvejelserne i fremtidig udvikling af sociale robotter til demente borgere.

6
BEGREBER, FIGUR- OG TABELLISTER
Begreber fra vores teori sættes i kursiv første gang disse bruges. For eksempel: relevante sociale grupper eller fortolkningsmæssig fleksibilitet mv. Litteraturhenvisninger i rapporten er anvendt efter APA referencesystem:For eksempel: ”(...) xxxxx” (Olsen & Pedersen, 2009, s. 232). Kilderne kan findes i litteraturlisten bagest i rapporten. Lyd- og videofiler vil være ved-lagt på DVD. Citater er i kursiv. Er citaterne over to linier lange, layoutes de med luft over og under. Er de under to linier layoutes de som en del af den pågældende sætning.
Vi henviser til modeller i dokumentet således: (Model x). Flere af modellerne er inspire-ret fra bøger og artikler, men illustreret og modificeret på egen hånd.
1. SKRIFTFORMATER (OVERSKRIFT)
1.2 Niveau 2 overskriftDette er et eksempel på brødtekst, mumletekst: Lorem ipsum dolor sit amet, consecte-tur adipiscing elit. Fusce quis lectus quis sem lacinia nonummy. Proin mollis lorem non dolor. In hac habitasse platea dictumst. Nulla ultrices odio. Donec augue. Phasellus dui. Maecenas facilisis nisl vitae nibh.
1.3 Niveau 3 overskriftDette er et eksempel på brødtekst, mumletekst: Lorem ipsum dolor sit amet, consecte-tur adipiscing elit. Fusce quis lectus quis sem lacinia nonummy. Proin mollis lorem non dolor. In hac habitasse platea dictumst. Nulla ultrices odio. Donec augue. Phasellus dui. Maecenas facilisis nisl vitae nibh.
1.4 Niveau 4 overskriftDette er et eksempel på brødtekst, mumletekst: Lorem ipsum dolor sit amet, consecte-tur adipiscing elit. Fusce quis lectus quis sem lacinia nonummy. Proin mollis lorem non dolor. In hac habitasse platea dictumst. Nulla ultrices odio. Donec augue. Phasellus dui. Maecenas facilisis nisl vitae nibh.

7
SEMESTERBINDING
I dette 2. semesterprojekt indgår Teknologiske Systemer og Artefakter som den obligato-riske dimension. Dimensionen har fokus på teknologiske systemer og artefakters indre mekanismer, processer, samt skabelse af ydre effekter – negative som positive. Da vi med vores projekt ønsker at finde frem til hvilke overvejelser man i designfasen bør gøre i ud-vikling af sociale robotter til demente, vil denne dimensions fokus være til gavn for vores arbejde, da vi derfor vil undersøge et eksempel på en social robot til demente. Derudover vil vi betragte teknologien ud fra en socialkonstruktivistisk tilgang, og derfor også lægge vægt på at undersøge den sociale robot i et socioteknisk system. Vi har derudover valgt at inddrage dimensionen: Subjektivitet, Teknologi og Samfundsliv. I den officielle beskrivelse af denne dimension er der opsat tre punkter, og alle tre er me-get relevante for vores problemstilling. Ved at undersøge udvikling, implementering og brugen af en social robot, undersøger vi også forandringer i hverdagsliv og arbejdsliv som følge af teknologisk udvikling. Da vi derudover undersøger en social robot som en del af et socioteknisk system, ser vi derfor også på teknologiers og teknologiske forandringspro-cessers samspil med brugere, læreprocesser. Vi undersøger en teknologi som påvirkes af samfundsmæssige tendenser og drivkræfter og herunder virksomheders og det offentliges påvirkning af teknologiudvikling. Vi mener at denne dimension bringer en humanistisk vinkel ind over vores problemstilling, hvilket er en nødvendighed, da det er mennesket der er det helt centrale i forhold hertil. Vi mener at samspillet mellem disse to dimensioner, vil give en bredere indsigt og forstå-else for både de tekniske og de humanistiske aspekter i vores problemstilling, hvilket er en nødvendighed for at kunne finde frem til vigtige overvejelser i udviklingen af sociale robotter til demente.

1234
INTRODUKTION .... S. 11
METODE ................. S. 15
EMPIRI ................... S. 19
TEORI ..................... S. 37
1.2 Problemformulering ...................s. 12
1.3 Afgrænsning ................................s. 12
3.1 Viden om demens .......................s. 19
3.2 Teknologien bag Paro .................s. 21
3.3 Aktører ..........................................s. 23
4.1 Teknologianalyse .........................s. 37
4.2 Teknologi-Etik ..............................s. 40

5678
ANALYSE .................S. 45
KONKLUSION .........S. 59
DISKUSSION ..........S. 61
KILDELISTE ............S. 65
5.1 Teknologianalyse ud fra SCOT ..s. 45
5.2 Etisk analyse af Paro .................s. 54

10
INTRODUKTION
Når der udvikles ny velfærdsteknologi, opstår der en lang række overvejelser, som bør foretages – etiske såvel som tekniske.
”

11
1. INTRODUKTION
1.1 Indledning og problemfelt
Vi arbejder i denne projektrapport frem imod at opstille en række etiske, moralske og teknologiske overvejelser, der i fremtiden bør gøres, i udviklingen af sociale robotter til demente. Udviklingen af velfærdsteknologier fremstår som en umiddelbar selvfølgelig del af den teknologiske udvikling. Denne udvikling kan hurtigt tages for givet, hvis den ikke kritisk problematiseres. Når der udvikles ny velfærdsteknologi, opstår der en lang række overve-jelser, som bør foretages – etiske såvel som tekniske. Disse overvejelser er dog ikke nød-vendigvis en selvfølgelig del af den faktiske udvikling og brug af ny velfærdsteknologi.
Når vi ser på det teknologiske fænomen – en social robot til demente – ser vi dette ud fra en socialkonstruktivistisk videnskabsteoretisk tilgang. Dette bevirker at vi forstår denne teknologi som social konstrueret. Her tager vi fat i en normali, og kritisk problematiserer dennes udvikling, som ellers er taget for givet. Den demografiske udvikling bevirker, at vi i Danmark vil opleve en forøgelse på over en tredjedel af personer over 65 år i løbet af de næste 30 år (Vær Tryg, 2009: s. 4). Dette kan på længere sigt være en udfordring, som pleje- og omsorgssektoren skal omstille sig til. Endvidere vil antallet af personer med behov for udredning af demens, ifølge Sund-hedsstyrelsens Medicinsk Teknologivurderings-rapport, stige fra de nuværende 55.000 til 124.000 i år 2040 (Vær Tryg, 2009: s. 2).
Dette vil skabe et pres på plejeområdet for demente borgere, hvilket giver en stigende interesse i udvikling af hjælpemidler. ”Københavns Kommunes demenspolitik 1” fra 2009 har endvidere som målsætning at sikre, at teknologi og forskning skal indgå aktivt i tilbud og udvikling af demensområdet, og ydermere er det af høj prioritet at støtte ud-viklingen af teknologier, ”(…) der kan bidrage til at skabe en effektiv og sammenhængende service til kommunens borgere og understøtte et hverdagsliv med størst mulig uafhængighed, værdighed og tryghed” (Vær Tryg, 2009: s. 2). Københavns Kommunes Sundheds- og Omsorgsforvaltning har derfor også, i april 2006, givet et tilskud på 2.984.000 kroner fra puljen ”Målrettet hjemmepleje til borgere med demens” (Vær tryg, 2009: s. 9).På et højere statsligt plan har regeringen i marts 2008, sat 3 milliarder kroner af fra kva-litetsfonden til arbejdskraftbesparende teknologi og projekter, for derved at frigøre res-sourcer og endvidere forbedre kvaliteten af den offentlige plejesektor. Denne pulje penge giver i høj grad mulighed for offensiv investering i velfærdsteknologiske projekter og ud-vikling heraf (Vær tryg, 2009: s. 10). Her forventes, at en del af denne udvikling vil være fokuseret på sociale robotter.

12
Implementeringen og brugen af robotsælen Paro i Danmark, er et af de første stadier i udvikling, brug og implementering af sociale robotter til demente borgere. Paro er en social robot, som i første del af sin udvikling ikke var tænkt som en terapeutisk velfærds-teknologi til demente, men derimod som et substitut for levende dyr eller kæledyr. Den sociale robot var til at starte med henvendt til mennesker, som af forskellige grunde ikke kan holde levende kæledyr. Robotten blev udviklet i Japan af blandt andre robot-inge-niøren Dr. Takanori Shibata, og i Japan er robottens primære funktion stadig den først tiltænkte. I Danmark har man, i forbindelse med Vær Tryg-projektet (2009), som de første, målrettet testet og evalueret brugen af denne sociale robot i demensplejen. Heref-ter har der været en teknologisk og brugsmæssig udvikling, rettet mod Paro som værende en velfærdsteknologi (Vær tryg, 2009). Af den grund vil det være interessant at analysere og forstå denne teknologi i et socialkonstruktivistisk perspektiv.
1.2 ProblemformuleringHvilken betydning kan det forventes, at den sociale konstruktion og implementering af Paro kan have for etiske, moralske og teknologiske overvejelser for fremtidig ud-vikling af sociale robotter til demente? 1.3 AfgrænsningDa vi ser Paro som værende en social konstruktion, og som en del af et vidtfavnende so-cioteknisk system, kræver det en afgrænsning fra visse dele af dette system. Vi afgrænser os derfor fra at fokusere på politiske og økonomiske aspekter. Vi har endvidere vurderet, at det ikke vil være tidsmæssigt gennemførligt at udarbejde en dybere undersøgelse af tværkulturelle aspekter i den teknologiske udvikling af Paro. Derfor afgrænser vi os altså fra at lave en dybdegående undersøgelse af brugen af Paro i Japan, og fra at redegøre og analysere det japanske teknologisyn i forhold til det danske. Derudover afgrænser vi os også fra at se på brugen af Paro som velfærdsteknologi i andre lande end Danmark. Vi afgrænser os fra at lave empirisk dataindsamling og undersøgelser på flere forskellige institutioner, da formålet med dataindsamling herfra er at få et indblik i den praktiske brug af Paro, og ikke at skabe et bredt indtryk af danske plejecentre, hvor Paro benyttes. Vi afgrænser os fra at undersøge og se på videnskabelige undersøgelser, der omhandler den deciderede effekt af Paro på demente, da vi har valgt at fokusere på en forståelse af teknologien som en social konstruktion, og det etiske aspekt i den praktiske brug. Her afgrænser vi os altså fra at lave en etisk vurdering af selve implementeringen af sociale ro-botter, med henblik på om handlingen er etisk eller moralsk korrekt eller ukorrekt.

13

14
METODE
Ud fra den socialkonstruktivistiske tilgang forstår vi teknologi som en social konstruktion.
”

15
2. METODE
Efter den industrielle revolution begyndte der i høj grad at blive reflekteret over viden-skabens og teknikkens indvirkning på menneskelivet. Her kan nævnes Marx, Weber, Simmel, Freud, Heidegger, Mumford og Frankfurterskolen (Schraube, E., 2009: s. 1). Ud-viklingen af denne forståelse og anerkendelse heraf, har siden ført til en institutionalise-ring af socialvidenskabelig videnskabs- og teknikforskning og skabelsen af “Science and Technology Studies” (STS). I dette felt mødes især filosofiske, sociologiske, historieviden-skabelige, politologisk, litteraturvidenskabelige antropologiske og psykologiske tanketra-ditioner (Schraube, E., 2009: s. 1). Vi vil i vores videre diskussion og reflektering over videnskabsteoretisk fokus og metodevalg, ikke gå dybere ind i redegørelse og diskussion af dette felt, da det foregående blot har til opgave at give læseren af den nærværende rap-port, en hvis indsigt og horisont i den historiske baggrund for den socialkonstruktivisti-ske forståelse af teknologi.
Vi har fra starten af denne projektrapport defineret og begrundet vores problemstilling, ud fra en socialkonstruktivistisk tilgang og forståelse af teknologi. Her ligger en viden-skabsforståelse byggende på opfattelsen af videnskab og teknik som en social proces. Ud fra den socialkonstruktivistiske tilgang forstår vi teknologi som en social konstruktion, hvor teknologien, som en del af et socioteknisk system, påvirkes af mange sociale proces-ser, og forståelsen for en given teknologis udvikling, ligger derfor i at forstå de sociale indvirkninger i forhold til teknologiens udvikling.
Ud af denne videnskabsteoretiske tilgang, udspringer vores valg af metode og teori. Til vores teknologianalyse af robotsælen Paro, vil vi gøre brug af Social Construction of Tech-nology (SCOT). SCOT er derfor til en hvis grad også vores metodiske udgangspunkt, idet grundlaget for vores analyse er en række kvalitative interviews, blandt andet med centrale aktører som har med demente borgere og Paro at gøre, samt avisartikler.
Vi har på baggrund af vores socialkonstruktivistiske tilgang, valgt at gøre brug af semi-strukturerede interviews som kvalitativ metode for at tilegne os viden fra centrale aktø-rer, som er og har været en del af den sociale konstruktion af Paro. I semistrukturerede interviews laver man en spørgeramme, som er en række retningslinjer for hvad der i in-terviewet skal spørges om. Med disse spørgsmål lægges der op til, at besvarelsen fokuseres på beskrivelse og eksempler. Hvis der ønskes mere specifik viden fra den interviewede, kan der formuleres mere lukkede spørgsmål, som forventes at give mere specifikke besva-relser. Vi har valgt at gøre brug af denne metode, da vi ønsker at få indsigt i de centrale aktørers personlige erfaringer, forståelser og holdninger til Paro og vi mener at semistruk-turerede interviews i høj grad vil få vores centrale aktører til at uddybe og beskrive disse. Derved opnår vi at få indsigt i de centrale aktørers erfaringer, forståelser og holdning til

16
Paro, som er af stor vigtighed for at kunne analyse og forstå Paro som en socialt konstru-eret teknologi.
Vi gør endvidere brug af casestudiet, og har her Paro som vores case. Vores ønske med denne metode er at indsamle viden om og derefter analysere på erfaringer af implemen-teringen af Paro som social robot til demente. I casestudiet af Paro, gør vi brug af flere aktører som datakilder og indsamler endvidere empiri fra forskning, rapporter, artikler og videomateriale. På denne måde belyser vi det samme fænomen gennem forskellige aktører og datasæt, og kan derved lave en triangulering af holdninger, påstande og eksi-sterende viden. Denne triangulering vil kunne vise os, hvor vores data konvergerer, og derved verificere eksisterende viden og indsamlede erfaringer.

17

18
EMPIRI
I takt med svækkelse af den intellektuelle funktion, skabes behovet for pleje og omsorg.
”

19
3. EMPIRI
I dette afsnit vil vi sammenfatte vores indsamlede empiri af viden og erfaringer. Vi vil kort give en indsigt i og forståelse af demenssygdom. Dernæst vil vi beskrive Paro ud fra en redegørende teknologisk vinkel, for at få en indsigt i den fysiske opbygning og historie. Til sidst vil vi introducere de centrale aktører og deres forbindelse, erfaringer, holdninger og krav til Paro. Alt dette vil vi senere analysere i en teknologisk- og i en etisk analyse. 3.1 Viden om demensDa den sidste slutbruger af den sociale robot som velfærdsteknologi er demente borgere, er det vigtigt at have en hvis indsigt i og forståelse af denne gruppe. Derfor vil vi i det følgende afsnit, give en kort indføring i centrale forståelser af demenssygdom. Herunder demens som sygdom, omsorg/pleje, kommunikation, pårørende og hjælpemidler.
3.1.1 Demens er tegn på sygdom – ikke alderdomOrdet demens stammer fra latin og betyder “svækket sind”. Sygdommen har fra starten af det 20. århundrede, i høj grad været associeret med alderdom (senil demens). Diffuse udtryk og definitioner som “at gå i barndommen”, “alderdomssløvsind” etc., har været med til at underbygge synet på demens, som en del af alderdommen (Buss et al., 2008: s. 13). Demens er dog ikke tegn på alderdom, men derimod en organisk lidelse, hvor den intellektuelle funktion – menneskets evne til at tænke – svækkes. I den 10. udgave af diagnosebogen “International Classification of Disorders”, udgivet af vedenssundhedsorganisationen WHO, klassificeres sygdomme og symptomer, der skal være til stede for at kunne stille en diagnose – såsom demens (Buss et al., 2008: s. 13). Se faktaboks til højre for symptomer for demens.
3.1.2 Omsorg/pleje og demensI takt med svækkelse af den intellektuelle funktion, skabes be-hovet for pleje og omsorg. Behovet for hjælp, støtte, pleje og omsorg kan for den enkelte demente borger være stort. Retten til selvbestemmelser og integritet er her essentiel. Alle danske borgere har ret til selvbestemmelse og integritet – her forstås henholdsvis retten til at bestemme over eget liv og retten til respekt for det enkelte menneske. Retten til selvbestemmelse er dog kun anvendelig for borgeren, hvis denne har evnerne til at gøre brug af denne rettighed, altså besidder en hvis handleevne (Buss et al., 2008: s. 61). Demenssygdommen vil svække borgerens handleevne, og mange mister den helt – og
FAKTA: DEMENS (ICD-10)
I. Svækkelse af hukommelse, især for nyere data.
II. Svækkelse af andre kognitive funktioner.
III. Bevaret bevidsthedsklarhed i et omfang tilstrækkeligt til at bedømme I+II.
IV. Svækkelse af emotionel kon- trol, motivation eller social adfærd med mindst 1 af føl - gende: I. Emotionel labilitet. II. Irritabilitet. III. Apati. IV. Forgrovet social adfærd.V. Varighed mindst 6 mdr.
Kilde: Buss et al., 2008: s. 13

20
derved mindskes muligheden for reel selvbestemmelse.Inden for omsorg og pleje af svækkede borgere, er der en hårfin grænse mellem omsorgs-pligt og omsorgssvigt. Dette kan i visse tilfælde komme til den konsekvens, at der gøres brug af magtanvendelse overfor demente borgere, hvis demenssygdom er så fremskreden, at denne ikke længere har mulighed for at varetage egne interesser (Buss et al., 2008: s. 189). Før en magtanvendelse, bør alle pædagogiske redskaber dog tages i brug for at undgå og begrænse brugen af magtanvendelse.
3.1.3 Kommunikation og demensKommunikation består i at skabe fælles forståelse. Tanker, følelser og signaler udveksles både verbalt og nonverbalt fra én person til en anden, eller flere (Buss et al., 2008: s. 67). Den verbale kommunikation består af samtale, bygget på sproglig kunnen, hvorimod nonverbal kommunikation består af et ordløst sprog, hvor kropsproget underbygger den verbale kommunikation (Buss et al., 2008: s. 67). I kommunikationen med den demente, bør der lægges vægt på den dementes reaktion. I opfattelsen af budskaber for den demente, lægges der i højere grad vægt på kropssproget, frem for det sagte og udtale. Ved kommunikation mellem to personer er der et gensidigt ansvar for at opnå fælles for-ståelse. Dette forudsætter færdigheder for at kunne gøre sig forståelig og at kunne forstå. Disse færdigheder er ved den demente nedsatte, og kommunikationen med den demente bør derfor i høj grad tilpasses den dementes forudsætninger og niveau (Buss et al., 2008: s. 69).
3.1.4 Pårørende til dementePårørende kan være de, som har stået den demente nær, og har bredt kendskab til dennes livshistorie og hverdagsliv. Ofte er de primære pårørende tidligere ægtefæller eller børn. I sundhedssystemet gøres den pårørendes omsorg til en almindelig del af omsorgsstruktu-ren. For at kunne påtage sig denne rolle, opstår der et behov for rådgivning, vejledning, støtte og hjælp (Buss et al., 2008: s. 230). Som pårørende kan det være fysisk, psykisk og socialt udfordrende at stå i en situation, hvor en nær relations mentale tilstand svækkes betydeligt.
3.1.5 Teknik, hjælpemidler og demensDemente kan have et stort behov for støtte og hjælp. Denne støtte og hjælp kan i visse tilfælde ydes gennem teknologiske hjælpemidler. Behovet kan være af forskellig karakter, og tekniske hjælpemidler kan derfor have forskellige formål. De kan for eksempel have til formål at støtte kognitive funktioner, opretholde eller skabe aktiviteter og deltagelse i den dementes hverdagsliv (Jensen, 2008: s. 15).

21
3.2 Teknologien bag Paro
Vi vil i det følgende afsnit beskrive robotsælen Paro, for blandt andet at få en forståelse af hvordan teknologien fysisk fremstår, hvordan den ifølge udvikleren skal virke, hvilken udvikling den har været igennem og hvem der har været centrale i at indføre og udvikle teknologien, til det den er i dag. Kilden til denne tekniske beskrivelse er først og frem-mest Paro’s officielle hjemmeside (Paro.jp). Derudover gør vi brug af avisartikler fra blandt andet Wall Street Journal og videnskab.dk, og ekspertviden fra Lone Gaedt Se-niorkonsulent ved Teknologisk Institut.
3.2.1 Paro og udviklingen bagRobotsælen Paro er en såkaldt Mental Commitment Robot – en type robot, som har til formål at interagere med mennesker på en sådan måde, at de bliver følelsesmæssigt knyttet til den. Udviklingen af robotten startede i 1993 af japanske Dr. Takanori Shi-bata (Shibata). Han fortæller i et interview til avisen Wall Street Journal i 2010, at Paro oprindeligt blev udviklet til at vække brugerens erindringer om dyr og børn: ”Inventor Takanori Shibata says he designed Paro to evoke memories of pets and babies” (A. Tegersen & M. Inada, 2010). Den er siden da blevet redesignet og videreudviklet, og blandt andet er omkring 200 robotsæler i dag at finde i Danmark, og disse kan, ifølge Seniorkonsu-lent på Teknologisk Institut, Lone Gaedt, anvendes som redskab til omsorg og pleje for demente borgere (Interview, Gaedt, L., 2012). Forskning fra 2003-2004 har nemlig vist, at Paro har en positiv terapeutisk effekt:
”(…) the contact with PARO proved to be therapeutically effective: psychologically, che-ering up (…), exhilarating, and improving the depression (…); physiologically, remit-ting stress (…); and socially, augmenting interaction among the aged and with nursing personnel and bringing bright atmosphere.” (Pressemeddelelse, 2004)
Derudover har nyere forskning vist, at Paro også har en vis effekt på mennesker med demente lidelser i alderen (Shibata et al., 2008). Fra 3. generation af Paro til 8., skiftede udviklingen af robotten fokus fra at have mennesker, som ikke kan holde husdyr, som målgruppe, til i stedet at rette fokus mod ældrepleje (Pressemeddelelse, 2004).Teknologisk Institut i Danmark, har i dag en kontrakt med de japanske udviklere af Paro, der giver dem ret til at sælge og distribuere robotterne til Danmark og resten af Europa (Interview, Gaedt, L., 2012).
Hvad angår fremtidig udvikling af Paro, fortæller Shibata til videnskab.dk i marts, at Paro er under konstant udvikling, og kommer i den forbindelse ind på, at han har en række nye målgrupper for Paro i sigte: ”For tiden er jeg i gang med at udvikle nye program-mer, der tilpasser Paro helt præcist til bestemte grupper af mennesker, fordi jeg har fundet ud

22
af, at Paro skal reagere anderledes på demente end på børn med ADHD” (D. Svane-knud-sen, 2012).
3.2.2 Paro tekniskPå Paros officielle hjemmeside (Paro.jp), forklares det, at robotten specifikt er designet til at frembringe tre typer virkninger: Psykologiske, fysiologiske og sociale. For det første skal den virke afslappende og motiverende, derudover skal robotsælen bidrage til forbed-ringer af vitale funktioner, og endeligt kan den i plejearbejdet forbedre kontakten mel-lem den demente og plejepersonalet. Paro kan desuden bruges af borgere, som på grund af allergi, eller sundhedsmæssig skrøbelighed, ikke kan holde levende husdyr (Paro.jp, 2012a). I udviklingen af robotter, der skal ligne dyr, skal der tages højde for de menne-skelige erfaringer og det kendskab vi har til det dyr, den skal efterligne. På den måde be-stræbes der på at opretholde troværdigheden. Hvis robotten for eksempel ligner en hund, forventes det, at den kan udføre visse handlinger, såsom at løbe og springe. Hvis robot-ten derimod ikke kan udføre disse handlinger og efterleve vores forventninger, mister vi troværdigheden til den. På baggrund af dette, erfarede folkene bag Paro, at det var opti-malt at udvikle en robot, der ikke kræver megen eller kendt bevægelse, og dermed ikke sætter troværdigheden på prøve. Samtidig erfarede de, at det ikke var ideelt at robotten lignede et velkendt husdyr, som for eksempel katten, da brugerne her hurtigere mistede interessen, i takt med at de opdagede fejl og mangler, i forhold til det levende modstykke (Paro.jp, 2012b). Paro, der vejer 2,7 kilo og er 57 centimeter lang, er afbilledet efter en Grønlandssælunge, der appellerer til omsorg, og som man samtidig må antage, at de færreste brugere har mødt i levende live. Derved undgås det at brugerne, som før beskrevet, mister tilliden til robotten (Pressemeddelelse, 2004)(Paro.jp, 2012b). Robotten er udstyret med fem forskellige sensorer, der kan måle forholdsvis berøring (taktil), lys, lyd, temperatur og positur. Disse gør, at Paro kan interagere med omgivel-ser og mennesker omkring den, og virke virkelighedstro. De taktile sensorer bevirker, at Paro kan registrere berøring og kende forskel på, om den bliver aet blidt eller slået. Disse menneskelige inputs husker Paro, og hvis den aes, vil Paro huske dens forrige handling, og gentage denne for at blive aet igen. Derimod vil Paro også undgå at gøre en handling igen, hvis den bliver slået efter en bestemt handling. Lydsensorer gør, at robotten kan genkende stemmer og reagere på retningsbestemte lyde såsom navne, hilsner og ros. Som reaktion på en hilsen eller påtale fra en person, vil Paro for eksempel rette sig imod per-sonen og udtrykke glæde. Samspillet mellem alle disse sensorer og motorer bevirker, at Paro fungerer som en uafhængig robot, der besidder evnen til at udtrykke ‘kunstige følel-ser’ såsom glæde og ubehag. Den viser altså gennem sine bevægelser og mimik, hvordan den helst vil behandles. Paro er udstyret med motordrevne bevægelige dele i hovedet,

23
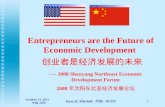
lufferne og halen, og kan endvidere gengive Grønlandssælungens naturtro lyde og kald. Den har en døgnrytme, hvilket betyder, at den er aktiv i løbet af dagen, og bliver træt om aftenen. Med lyssensorerne kan Paro genkende mørke og lys. Temperatursensorer er med til at regulere Paros temperatur, så den er mest behagelig for brugeren. For eksempel bliver Paro varmere, når den holdes tæt. Paro er beklædt med blød, kunstig, hvid pels for at højne komforten og for at understøtte virkelighedsfølelsen. Desuden er pelsen behandlet med et antibakterielt materiale, der gør robotten hygiejnisk, og et elektromag-netisk skjold, der gør det muligt for personer med pacemakere at sidde med Paro (Paro.jp, 2012a). 3.3 AktørerDa vi i projektet analyserer Paro ud fra SCOT-analysen, som er aktørbaseret, er det af afgørende betydning, at vi finder frem til centrale aktører, der har en forskellig viden, omgang eller konkret erfaring med Paro. Vi vil i det følgende afsnit præsentere sam-menfattede afsnit, baseret på interviews med en række centrale aktører. Først beskrives et interview med Lone Gaedt, ekspert i Paro fra Teknologisk Institut, herefter ingeniøren Karsten Ahrentsen, der som reparatør har en teknisk indsigt i robotten. Dernæst vil vi beskrive vores interviews med en række plejere fra blandt andet Plejehjemmet Høj-devang, som har praktisk hverdagserfaring med robotten, og endeligt Bodil Fabricius, der er læringskonsulent og har et indblik i uddannelsen af plejepersonale. I figur 1 her-under, har gruppen opstillet de udvalgte aktører og deres baggrund.
Fig. 1: Aktører og deres baggrund
PARO
GAEDT, LONE– TEKNOLOGISK INSTITUT– EKSPERT
TAKANORI, SHIBATA– AIST, JAPAN– ENGINIØR– OPFINDER
AHRENTSEN, KARSTEN– TEKNOLOGISK INSTITUT– ROBOT-EKSPERT (INIGENIØR)
BIRK, LONE– SOSU-ASSISTENT– KURSISTS– PLEJER
RUGH, CHARLOTTE– SOPU I HILLERØD– ERGOTERAPEUT– UNDERVISER (DEMENSKURSUS)
ANDREASEN, SUNRID– HØJDEVANG– ERGOTERAPEUT– PLEJER
FABRICIUS, BODIL– SYGEPLEJERSKE– LÆRINGSKONSULENT (SOSU)
RASMUSSEN, HELLE– HØJDEVANG– GRUPPELEDER– PLEJER
JAPANSKE BORGERE– FAM. SHIMURA– FRU HIRAKAWA
RASMUSSEN, LISBETH– HØJDEVANG– PLEJER

24
3.3.1 Lone Gaedt, Teknologisk InstitutDe operationelle mål for telefoninterviewet med Lone Gaedt (Gaedt) var, dels at få en øget baggrundsviden om Paro som gruppen ikke har været i stand til at finde andet steds, dels at få generel information om Paro i Danmark og endeligt at få en ekspert på områdets subjektive holdning til sociale robotter i velfærdssektoren – idag og for fremti-den. I det følgende har gruppen sammenfattet en række vigtige pointer fra interviewet.
Gaedt har i flere år arbejdet som fysioterapeut i blandt andet ældresektoren, hvor hendes fokus har været på demens og mobilitet. Hendes tilgang til Paro opstod, da hun blev projektleder for “Vær tryg-projektet” (2009), hvor hun var med til at fremfinde og eva-luere 40-50 forskellige teknologier der kunne hjælpe personer med demens. En af disse teknologier var Paro, og i forlængelse af projektet etablerede Teknologisk Institut i august 2008 et decideret Paro-projekt, hvor Gaedt også fik en central rolle, denne gang i at professionalisere brugen af velfærdsrobotter i form af kurser, vejledning mv. (Interview, Gaedt, L., 2012: 1m58s).Hun er i dag ansat som seniorkonsulent på Center for Robotteknologi ved Teknologisk Institut, og er efter gruppens vurdering (og Teknologisk Instituts japanske samarbejds-partneres) den ledende ekspert på området og har qua sine erfaringer et indgående og bredt kendskab til Paro i Danmark og Europa (Teknologisk.dk, 2012a).I dag er der et par hundrede Paro’er i Danmark, hvoraf de fleste findes på demenshjem-mene, men Gaedt fortæller i interviewet, at der også er en stigende interesse for plejeom-rådet for udviklingshæmmede, lige som hun også ser muligheder i forhold til brugen af Paro i forbindelse med personer med symptomer indenfor autisme spektret. Hun ser dog ikke Paro som en robot for alle: ”Vores skrækscenarie er jo, at vores ældre borgere sidder på stribe og klapper på en Paro hver. Det er ikke sådan noget vi ønsker” (Interview, Gaedt, L., 2012: 6m18s).
3.3.1.1 Producenten af ParoI interviewet kommer Gaedt blandt andet ind på, hvordan velfærdsteknologier bliver udviklet i Japan, og hvordan de efter hendes mening, kunne udvikles mere og bedre ved også at fokusere på slutbrugeren, implementeringsprocesser og evaluering af effekt:
“Med al respekt for japanerne, så er de jo brandgode til at udvikle robotter og teknolo-gier, men ikke så optagede af at evaluere. I vores kultur har vi tradition for at arbejde mere med sociologiske, antropologiske, psykologiske o.a. evalueringsmetoder.” (Interview, Gaedt, L., 2012: 4m13s)
Netop fordi målgruppe og implementeringsstrategi ikke er hjørnestene i udviklingen, heller ikke af Paro, har Gaedt og Teknologisk Institut iværksat et certificeringskursus, der skal oplære plejepersonalet i brugen af sælrobotten, for som hun siger:

25
“(...) der er rigtig, rigtig mange etiske, sociokulturelle, pædagogiske aspekter af at bruge robotter og især sådan en som Paro. Det er ikke bare en ‘dims’ man kan sætte på skødet af en person, og så lave noget andet.” (Interview, Gaedt, L., 2012: 4m13s). Robotten skal altså anvendes af uddannet plejepersonale.
Til trods for japanernes fokus på det tekniske og mindre på det relationelle og situatio-nelle, så har de, ifølge Gaedt, ikke problemer med udvikle robotter af høj kvalitet: “Man kan godt slå på og tabe Paro ned på maven uden at der sker noget” (Interview, Gaedt, L., 2012: 8m26s).
3.3.1.2 BrugerenRobotten kan ikke gøre nogen fortræd fysisk, men Gaedt har på egen hånd erfaret, at den kan gøre skade på et emotionelt eller ‘eksistentielt’ plan:
“Personer som er så nødstedte og handicappede, at de ikke kan tale længere, ikke kan give omsorg, altså noget så basalt, som at give omsorg til et dyr eller et barn, dem skal man jo være varsomme med at præsentere et appellerende og ´nødstedt´ dyr for.” (Inter-view, Gaedt, L., 2012: 12m28s)
Der er altså en del udfordringer, hvis Paro skal bruges med mennesker, og for at imø-dekomme disse mener Gaedt, at man som plejer skal kende sine beboere, og have et indblik i deres variationsmønstre og en viden om deres ressourcer, og samlet set er Paro trods udfordringerne, ifølge Gaedts, en succeshistorie:
”Den (Paro, red.) kan virkelig, hvis man er heldig og rigtig professionel Paro-bruger, så kan man opleve nogle fantastiske stemninger, nogle fantastiske løsninger på nogle udfor-dringer man står i et omsorgsfelt eller i en plejesituation.” (Interview, Gaedt, L., 2012: 15m53s)
At robotten så ikke bliver brugt på alle bosteder, hvor den er indkøbt, hænger ifølge Ga-edt sammen med, at der er travlt. Når der er travlt mener hun, at plejerne fokuserer på beboernes basale behov og kerneydelser frem for eksempel Paro.
I spørgsmålet om hvorvidt Paro ville kunne erstatte en ‘almindelig bamse’, er Gaedt ikke i tvivl. Set i lyset af projektets rygvind, de omkring 400 certificerede medarbejdere og de mange indkøbte Paro’er, mener hun, at Paro kan noget som bamser ikke kan: ”(…) man er ude i nogle situationer, med nogle personer, hvor vanlige krammeting ikke kan gøre det” (Interview, Gaedt, L., 2012: 24m10s).

26
Derudover understreger hun, at teknologier som gør en handicappet person fuldstæn-dig selvhjulpen og uafhængig af hjælp er langt ude i fremtiden, og at det blandet andet er svært fordi, “Jo flere handikap en person har, desto større er kompleksiteten og dermed udfordringen med at få lavet en vellykket implementering” (Interview, Gaedt, L., 2012: 22m25s). Til slut fortæller Gaedt, hvordan hun mener midlerne skal fordeles i udviklingen af so-ciale robotter:
”(…) 20% af midlerne medgår til selve teknologien, og de sidste 80% på implemente-ring (støtten). Det giver opmærksomhed til faglig, professionel implementering, og bidra-ger til at skabe motivation hele vejen rundt.” (Interview, Gaedt, L., 2012: 20m42s)
Gruppen hæfter sig særligt ved Gaedts klare holdning til implementeringen af teknolo-gier, som også opsummerer en del af hendes pointer i interviewet:
“Det er fuldstændig ligegyldigt om det er faldsensorer, om det er Paro eller en social robot eller et vasketoilet – der skal kigges så grundigt efter i forhold til hvordan den virker for ’end-user’en.” (Interview, Gaedt, L., 2012: 20m42s)
3.3.2 Karsten Thornø Ahrentsen, Teknologisk InstitutFormålet med at kontakte den danske Paro reparatør, var at få et indblik i den praktiske erfaring med Paro rent teknisk. I forbindelse med sit arbejde, vil Paro “doktoren” have indsigt i de typiske skader, tekniske fejl, mangler og omfang af reparationer. Dette har se-nere til formål, at kunne identificere og forstå de teknologiske krav til velfærdsteknologi.
3.3.2.1 ”Paro-doktoren”“Parodoktor” Karsten Thornø Ahrentsen (Ahrentsen) er ansat ved Teknologisk Institut. Ahrentsen er den eneste, der har med reparationer og service af Paro i Danmark at gøre. Oprindeligt var han den eneste uden for Japan, men i takt med ønsket om øget brug og implementering i Europa, mener han, at flere højst sandsynligt vil følge. Ahrentsen er oprindeligt uddannet ingeniør, og har arbejdet med robotsystemer og softwareudvikling i 20 år. På grund af sine tekniske færdigheder, blev han ansat til at varetage reparationer på Paro. Han har udover sin erfaring og uddannelse som ingeniør, fået undervisning af Paros udvikler, Dr. Takanori Shibata. Ahrentsen varetager reparationer i mindre og større grad, samt service af Paro i Danmark (Email, Ahrentsen, K., 2012; Teknologisk.dk, 2012b).
3.3.2.2 Antal, omfang og typiske reparationer af ParoAhrentsen fortæller, at antallet af reparationer svinger en del:

27
“I gennemsnit har jeg omkring én om ugen, men det er samlet set for både service og reparationer. Jeg vil tro at ca. 2/3 af Paro’erne jeg får ind, kræver en vis form for repara-tion i større eller mindre grad.” (Email, Ahrentsen, K., 2012)
Udover reparationer og anden vedligeholdelse, skal der udskiftes batteripakker, hvilket kunden dog selv kan gøre. Paro anvender et genopladeligt batteri, men kapaciteten af dette falder med tiden og intervallet for udskiftning ligger på mellem et og to år, afhæn-gigt af brug. Omfanget af reparationerne kan variere fra udskiftning af plastdele til større og mere omfattende reparationer – såsom udskiftning af motorer. Det tidsmæssige om-fang af reparationerne ligger typisk på omkring 1-4 timer. Almindelige serviceeftersyn indbefatter dog ofte også afmontering og vask af pelsen, hvilket bevirker, at reparations-tiden fordeles over flere dage. En del af de danske kunder tegner en servicekontrakt, som kan løbe i op til fem år. Denne faktureres årligt, for 6800 DKK eks. moms: “Denne aftale indebære at kunden kan sende Paro til reparation og service uden udgift. Desuden dækkes ud-gifter til skift af batteripakker” (Email, Ahrentsen, K., 2012). Det anbefales at Paro bliver sendt til tjek og vask en gang om året, men dette afhænger dog af, hvor hårdhændet Paro bliver brugt. Typiske skader på Paro er såkaldte “faldskader”, altså skader forårsaget af, at brugeren taber Paro. Dette indebærer som regel defekte halefinner eller skader på snuden. I forbin-delse med disse skader, er det ofte nødvendigt at lodde/reparere forbindelsen til sensorer – dog dækker servicekontrakten disse skader. Ofte er det også vask af pels og rensning af opladningsstik, hvor der af og til ses madrester, hvis brugeren har forsøgt at made Paro.
3.3.2.3 Fremtiden og overvejelser i udviklingenAhrentsen mener, at der vil komme en stor udbredelse af mange forskellige teknologier i Danmark. Nogle af disse skal udvikles i Danmark, mens andre skal importeres fra ud-landet. Han fortæller, at der allerede findes rigtig mange muligheder, men at der ligger et stort arbejde i at få dem implementeret og accepteret af brugeren. Hans indtryk er, at mange generelt har en negativ holdning til anvendelse af teknologier indenfor pleje og omsorg.
“Man ønsker ikke maskiner til at erstatte ‘varme hænder’, men jeg vil hellere bruge et vasketoilet end tørres af personale, og sådanne eksempler skal til for at ændre den gene-relle holdning i samfundet” (Email, Ahrentsen, K., 2012).
Hertil tilføjer han at uddannelse indenfor området derfor også er vigtigt, “(...) så de rig-tige argumenter trækkes frem i forbindelse med implementering og brug af velfærdsteknologi” (Email, Ahrentsen, K., 2012).

28
I forbindelse med udvikling og design af fremtidens velfærdsteknologier, er det vigtigt, med hensyn til service og reparationer, at lave meget robuste systemer af både konstruk-tion og betjening. “Slutbrugerne af velfærdsteknologi kan i visse tilfælde være meget hårdhæn-dede og måske gøre ting der ikke var forudset” (Ahrentsen, 2012). Med hensyn til umiddel-bare etiske overvejelser mener Ahrentsen: “Generelt er det vigtigt at udvikle teknologier som er en hjælp for brugeren og tilføre denne en øget velfærd (ikke for at kommunerne kan spare penge)” (Email, Ahrentsen, K., 2012).
3.3.3 HøjdevangSom led i vores indsamling af empiri kontaktede vi Plejehjemmet Højdevang på Amager i København, da dette plejehjem har fungeret som demenscenter siden 2005, og er i be-siddelse af flere Paro robotsæler. Vores mål med at kontakte Højdevang var at få et første-håndsindblik i brugen af Paro på et demenscenter i Danmark, til at sætte op over for den viden om Paro, vi har indhentet fra sekundære kilder.
3.3.3.1 Højdevang og ParoSom en del af ”Vær Tryg-projektet” (2009) (som Lone Gaedt var projektleder for), blev Højdevang i 2007 valgt til at være et af de første demenscentre i Danmark til at modtage en Paro. Sidenhen har demenscentret anskaffet sig tre Paro’er yderligere, og har nu i alt fire fordelt på tre afdelinger.
3.3.3.2 Lisbeth Rasmussen, HøjdevangEfter at have ringet til Demenscenter Højdevang blev vi sat i kontakt med Lisbeth Ras-mussen (L. Rasmussen), SOSU-assistent, med hvem vi fik sat et interview op Torsdag den 3. maj 2012. L. Rasmussen fortalte, at Paro næsten dagligt blev brugt på Højdevang, og at der på det givne tidspunkt, var sendt én til reparation. Før i tiden var de på Højdevang nødt til at sende de defekte robotsæler til Japan, men i dag har DTU overtaget ansvaret for re-parationerne, hvilket betyder, at Højdevang nu kan nøjes med at sende Paro til DTU’s reparationscentral i Odense på Fyn. Dette har selvsagt gjort reparationstiden betydeligt kortere, men omkostningerne er, ifølge L. Rasmussen, stadig store: ”Den sidste vi havde til reparation, tror jeg nåede op på 12.000 kr. da vi fik den tilbage” (Interview, Rasmussen, L., 2012a: 03m05s).
Grunden til at sælerne ofte går i stykker, er ifølge L. Rasmussen, blandt andet at flere af de demente borgere som sidder med Paro, prøver at give den mad eller drikke: ’’Det der sådan er rigtig skidt, det er hvis de prøver at give den noget at spise og drikke. Det kan den jo ikke tåle’’ (Interview, Rasmussen L., 2012a: 03m20s). Da Paro er indrettet således, at den oplades gennem munden, betyder det, at mad og væske der kommer ind i munden, let

29
ødelægger elektronikken inde i Paro, og gør at den må sendes til reparation. At brugerne af Paro, som på Højdevang oftest er kvinder, prøver at fodre den, kan ifølge L. Rasmus-sen, forklares ved, at Paro appellerer til brugernes beskyttende og moderlige instinkt. Dette er også den vigtigste effekt ved Paro, hvis man spørger L. Rasmussen. Paro giver, ifølge hende, brugerne muligheden for at vise og give omsorg – noget de ellers kun er modtagere af, og dette fortæller hun er vigtig: ’’(…) den appellerer til nogle beboere, som har et behov for at give omsorg og mere er der ikke i det” (Interview, Rasmussen, L., 2012a: 04m34s). L. Rasmussen bemærker dog også, at nogle beboere har lige så meget glæde af at sidde med en helt normal tøjdukke, og at det langt fra er alle deres beboere, som vil have glæde af Paro, da de eksempelvis ikke ser en grund til at sidde med en bamse, eller ikke har det samme behov for at give omsorg. Hun fortæller at en beboer, som fik Paro i armene, blev forskrækket og smed den fra sig så snart den bevægede sig. En vigtig forskel på Paro og normale tøjdukker, forklarer L. Rasmussen, er den terapeutiske og aktive-rende virkning, den kan have. Dette kommer eksempelvis til udtryk i, at Paro udsender nogle lyde, hvis en bruger stopper med at ae den. Dette vil oftest forekomme, hvis en beboer falder hen, hvilket L. Rasmussen forklarer, at beboere med demens har let ved at gøre. Dog har hun aldrig oplevet at en beboer, som sad med Paro, er faldet i søvn. Højdevang har ikke gennemført det certificeringskursus, som Teknologisk Institut udby-der, og dette mener L. Rasmussen ikke er nødvendigt:
”Vi er aldrig blevet certificerede (…) hvis det nu skal stå pænt, så synes jeg måske ikke det er helt nødvendigt at være certificerede, men jeg er godt klar over at der er nogen, som er interesserede i det. Det er man selvfølgelig på Robot Universitetet (…) det er jo ikke raketvidenskab.” (Interview, Rasmussen, L., 2012a: 04m09s)
3.3.3.3 Sunrid Andreasen, HøjdevangSunrid Andreasen er ergoterapeut på afdelingen Stuen på Højdevang, og hun benytter Paro i sit arbejde med nogle af beboerne. Hun nævner mange af de samme ting om Paro og dens funktion, som L. Rasmussen fortalte os om i vores interview med hende. Andre-asen understreger, at det er et problem, at Paro går i stykker, hvis brugerne mader Paro, og nævner også flere kritikpunkter. Generelt mener hun, at Paro ikke er bygget robust nok: ’’Den skal være meget mere robust til så hjerneskadede borgere’’ (Interview, Andreasen, S., 2012: 09m05s). Halen er en anden ting, som ofte går i stykker på Paro. Dette sker blandt andet på grund af, at mekanikken i halen ikke kan klare sælens egen vægt, som den ofte bliver udsat for, når en bruger sidder med den i skødet. Udover disse ting, som kræver større reparationer, er der den generelle slitage, såsom skæve knurhår, beskidt pels og nedslidte øjenvipper. Andreasen fremviser en faktura på 9.550 kroner fra den sidste reparation af Paro, og denne er efter få ugers brug, nu allerede igen på vej til reparation.

30
Disse økonomiske omkostninger er dog ikke det eneste negative ved de regelmæssige reparationer. Andreasen fortæller, at det kræver meget målrettet og kontinuerlig brug af Paro for at indkøre den i en fast rutine hos en beboer. Dette er nødvendigt for at beboeren kan vænne sig til robotsælen, og blive tryg ved den. På Højdevang har de på nuværende tidspunkt en specifik beboer, som benytter Paro hver dag, og for hvem den er til stor gavn og glæde. Hun er en af de beboere, med hvem man ved kontinuerlig brug, har fået opbygget en tryghed og rutine omkring Paro. Reparation af robotten varer normalvis to ugers tid, hvilket betyder at al arbejdstiden, der er brugt for at gøre den omtalte beboer tryg ved Paro, går tabt, og som Andreasen siger det: ”(…) så skal du køre den ind igen” (Interview, Andreasen, S., 2012: 18m47s). Ikke kun reparationerne koster penge. Der bruges også ressourcer på grund af spildt arbejdsfortjeneste. Andreasen for-tæller, at den ovennævnte beboer har stor glæde af Paro, da hun har et stort behov for at give omsorg, men at hun på grund af sin demenssygdom har svært ved at formidle omsorgen: ”Hun formåede jo ikke på nogen måde at få placeret omsorgen hensigtsmæssigt, så det endte altid i konflikter” (Interview, Andreasen, S., 2012: 06m47s). Paro har her vist sig at være den eneste løsning til at hjælpe denne beboer med at formidle disse følelser på en sund måde. Paro virker i dette tilfælde også aktiverende, da den giver en lyd, hvis beboeren falder i søvn og derfor stopper med at ae den. En anden positiv effekt ved Paro, er ifølge Andreasen, at den giver beboeren opmærksomhed og en form for identitetsfø-lelse. Hun forklarer at en beboer, som sidder med Paro, oplever at få opmærksomhed fra andre, da folk ofte bliver interesserede i den. Dette er med til at give denne beboer en følelse af at blive set og anerkendt – en uvant følelse for mange plejehjemsbeboere. Hun mener, at man kan snakke om, at Paro kan give øget livskvalitet for nogle beboere:
”(…) det er jo fedt at have – hvis den nu fungerede – når du så ser det her behov, så har du et redskab, at du kan give livskvalitet til den her borger. (…) hun får brugt sproget lidt og hun er mere vågen. Når de bare sidder og sover, så lukker de helt ned og bliver fuldstændig understimuleret.” (Interview, Andreasen, S., 2012: 14m27s)
Det er dog netop kun for nogle beboere, at Paro kan være til hjælp, og Andreasen un-derstreger, at det er enormt vigtigt at man kender til en beboers livshistorie og behov, før man giver denne Paro i armene: ”Du skal kende borgerens livshistorie for at kunne analysere dig frem” (Interview, Andreasen, S., 2012: 06m30s). For at plejepersonalet skal kunne have den rigtige tilgang, når de tager Paro i brug, mener Andreasen, at de skal være på et kursus, som giver dem de nødvendige værktøjer og kompetencer til det. En ting er at vide, hvordan man tænder og slukker den. En anden ting er at vurdere, hvem der kan og ikke kan have gavn af Paro, fortæller Andreasen. På Højdevang er der flere beboere, der har normale tøjbamser og Andreasen fortæller, at disse kan være mindst lige så effektive og brugbare som Paro, men mener samtidig, at der er brug for avanceret teknologi som Paro. Dette begrunder hun med, at der er nogle

31
beboere, som Paro har gjort det meget lettere at nå ind til. Dette forklarer hun blandt andet ved de lyde og bevægelser, som Paro kan lave, der appellerer til brugernes om-sorgsgen. Denne aktiverende effekt, åbner op til nogle personer, som før måske har været meget aflukkede, hvilket er noget, man er meget opmærksom på at undgå i arbejdet med demente, da det kan medvirke til at forværre demenssymptomerne.
3.3.3.4 Helle Rasmussen, HøjdevangHelle Rasmussen (H. Rasmussen) er gruppeleder for personalet på Demensdaghjemmet på Højdevang. H. Rasmussen nævner i interviewet, at Paro har en kognitiv effekt: ”Rent kognitivt sætter det noget igang hos dem (…) der kommer en kommunikation igang (…) der er mange små sidegevinster ved at have Paro liggende” (Interview, Rasmussen, H., 2012: 10m20s). Dog nævner hun også en bagside, man skal være opmærksom på, ved brugen af Paro. Det kan nemlig være en stor belastning for nogle demente borgere. For nogle borgere, kan de hyle lyde Paro udsender for at appellere til omsorgsgenet, have den helt modsatte effekt end den ønskede, hvis brugeren ikke kan rumme at give den omsorg, sælen kræver:
”Den kan have den modsatte effekt, helt klart! Hvis ikke de kan rumme den og ikke kan give det (omsorg red.), så er det en kæmpe belastning for dem og der skal vi, som personale, være utroligt opmærksomme på dem.” (Interview, Rasmussen, H., 2012: 11m37s)
H. Rasmussen sammenligner den hylende robotsæl, med en grædende baby, og siger, at det er en meget stor belastning for en borger. En anden vigtig pointe, når man vurderer, om en borger skal præsenteres for Paro, er ifølge H. Rasmussen, at man har at gøre med voksne mennesker, og det derfor kan være utroligt nedværdigende for en borger at blive givet Paro i armene, hvis denne ikke har glæde af den:
”Jeg er slet ikke i tvivl om at en del svært demente, stadigvæk vil opleve det som noget pjat (…) Det er sgu da nedværdigende, hvis han (borgeren, red.) ikke er det sted, hvor han kan have glæde af den (Paro, red.).” (Interview, Rasmussen, H., 2012: 13m51s)
H. Rasmussen har ikke været på et kursus i brugen af Paro, og trods hendes vurdering af at Paro kan have en belastende og nedværdigende effekt for nogle borgere, mener H. Rasmussen ikke, at der er brug for kurser i brugen af Paro: ”Det siger sig selv, at man ikke bare ligger et eller andet stykke ting i skødet på en anden og går. Jeg synes vi er rigtig godt klædt på” (Interview, Rasmussen, H., 2012: 25m33s).

32
En grundlæggende holdning til Paro, som alle interviewede på Højdevang lægger vægt på, er at Paro på intet tidspunkt må benyttes som substitut for menneskelig omsorg. Hertil udtaler H. Rasmussen:
“(…) det er jo ikke substitut for et andet menneske, at man bare lægger den: ”værsågod her har du Paro, så bliver du nok stille. Så kan jeg gå ud og vaske op imens”. Altså så-dan bliver den ikke brugt her! Jeg har aldrig oplevet på noget som helst plan at den er blevet brugt som: ”Så bliver jeg frigivet til noget andet (…) Det ville være skrækscena-riet, hvis man kom derhen.” (Interview, Rasmussen, H., 2012: 12m22s)
3.3.3.5 Observation af Paro i brug, HøjdevangMandag den 14. maj besøgte vi Højdevang, og fik i den forbindelse lov til at observere Paro blive brugt af en bruger på Højdevangs demensdaghjem. Demensdaghjemmet er et tilbud til hjemmeboende demente borgere, om at kunne komme 2-3 gange om ugen eller oftere, og få mad, drikke, nærhed og omsorg, og derved blive boende hjemme så længe som muligt. Den bestemte borger, som vi observerede bruge Paro, har hund hjemme og benytter, ud over Paro, ofte forskellige tøjbamser, når hun er på Højdevang. H. Rasmussen fortalte at brugerne af Paro, ofte har hund/kat eller er tidligere ejere af en. Da vi kom ind på daghjemmet, sad den omtalte borger med nogle tøjbamser, men viste straks opmærksomhed og genkendelse for Paro, da den blev taget frem. Hun blev spurgt, om hun ønskede at sidde med robotsælen og takkede ‘ja’. Hun begyndte straks at kærtegne robotten, og efter nogle minutter tændte en plejer diskret for den, hvorefter den hurtigt begyndte at blinke med øjnene, bevæge sig og give små kaldelyde fra sig. Dette fik straks brugeren til at smile bekræftende rundt i rummet og tale til robotten med beroligende ord. Plejeren, som havde tændt for Paro, blev siddende tæt ved og talte med på brugerens kommentarer om Paro og aede den også. Efter fem minutter begyndte plejeren dog at se til andre ting og lod brugeren sidde alene med Paro, hvilket denne syntes tryk og afslappet ved. Robotsælens bevægelser og lyde skabte også opmærksomhed hos andre i rummet, og små samtaler om Paro begyndte. Da en anden dement borger spurgte den kvindelige bruger, om den var levende, svarede hun ‘ja’ og fortalte endvidere, at hun havde haft Paro i mange år, men at det først var for nylig, at den var begyndt at lave lyde. Dette, fortalte H. Rasmussen, var et godt eksempel på, hvordan Paro kan hjælpe de kognitive processer på vej hos en dement bruger.
3.3.4 Udvalge Japanske borgeres brug af ParoSom en del af vores undersøgelse af hvordan Paro bruges i Japan, i forhold til i Dan-mark, har vi taget udgangspunkt i AIST’s (National Institute of Industrial Science and Technology) film ”Living With Paro”. Den korte film, som vi vurderer fungerer som pressemateriale og branding for Paro, giver et indblik i familien Shimura og fru Hiraka-

33
was liv med Paro. Den skildrer hvilke værdier og betydninger de tillægger det at have en robotsæl som kæledyr, frem for det levende modstykke.
Filmen tager udgangspunkt i at flere borgere i Japan køber Paro som et ekstra familie-medlem. Blandt andet fortæller fru Shimura: ”Paro is family, rather than a robot. If we think of Paro as a robot, we would not take care of it, and we would think that it is just a robot even if we cuddle it” (Living with Paro, 2006: 00m48s). Familien tager sig af Paro som var det et kæledyr, dog ser de muligheder i Paro, som de ikke har ved et levende kæ-ledyr.
I filmen følger man blandt andet familien på restaurant, hvor de fortæller at de blandt andet sætter stor pris på at kunne tage Paro med, der hvor kæledyr ellers ikke er vel-komne. ”This sushi-bar usually asks customers not to take their pets into the shop. However, the seal robot ’Paro’ is here. (…) We can take Paro everywhere, even go on a trip” (Living with Paro, 2006:00m19s) (Living with Paro, 2006: 02m19s).
Familien Shimura har haft hunde som kæledyr i over 20 år, og fortæller, at de har elsket dem, som var de deres egne børn. Men netop denne store kærlighed til dyrene gør at familien oplever stor sorg når deres hunde dør: ”Many pets give us a lot of joy, but we have to face sore bereavement” (Living with Paro, 2006: 01m55s). Familien har dog stadig en hund ved navn Taro. Men Taro er gammel og familien er allerede i gang med at plan-lægge deres ”nye liv efter Taro”. ”After we lose Taro, we are 3 people, I, my husband, and Paro. We are going to look for another happy life” (Living with Paro, 2006: 02m53s).
Udover familien Shimura, følger man også fru Hirakawa. Fru Hirakawa har boet alene siden hendes mand døde. På grund sin alderdom og svagelighed, opholder fru Hirakawa sig meget i hjemmet, og da hun savnede selskab købte hun Paro: ”Paro Answers and looks at me when I call it. Then, I feel communion with Paro. It looks at me, and squeals for joy when I call the name ’Paro’. Then, I feel calm and comfort” (Living with Paro, 2006: 04m8s). I filmen viser fru Hirakawa at hun har et rum specielt til når hun og Paro skal interagere. Hun placerer Paro på et lille bord midt i rummet, hvor hun somme tider også sover (Living with Paro, 2006: 04m53s).
Fru Hirakawa fortæller at hun synes at mennesket er svagt, og at hun derfor taler med Paro: ”Basically, human-beings are weak. That’s why I speak to Paro. But, it is still enough for me” (Living with Paro, 2006: 05m21s).

34
3.3.5 SOSU/SOPU Aktører
3.3.5.1 Bodil Fabricius, SOSUBodil Fabricius (Fabricius) er uddannet sygeplejerske og arbejder som læringskonsulent på Social- og Sundhedsskolen i Herning, hvor hun primært varetager opgaver, som om-handler demens og velfærdsteknologi. Konsulentarbejdet består i at planlægge særligt tilrettelagte arbejdsmarkedsuddannelser i samarbejde med virksomheder. Læringskonsu-lenterne fungerer her som faglig sparring for virksomheder, og de indgår som et vigtigt led i en dialog om kompetenceudviklingsbehov og afklaring. Vi kontaktede Fabricius, da hun netop har været med til at udvikle kurset ”Velfærdsteknologi i det daglige omsorgs-arbejde” på Social- og Sundhedsskolerne i Herning. Målet med interviewet var, at opnå et øget kendskab til hvorfor uddannelsesinstitutioner i Danmark uddanner og forbereder plejepersonale på anvendelse af teknologier, og hvilke subjektive holdninger hun har til anvendelse af Paro. Kurset ”Velfærdsteknologi i det daglige omsorgsarbejde” er, ifølge Fabricius vigtigt, fordi der i stigende grad er et behov for, at plejesektoren forholder sig til velfærdsteknologi, da den, i hendes egne ord, ”(...) kommer buldrende” (Interview, Fabricius, B., 2012: 00m47s). Til det tilføjer hun, at det kan være svært at følge med i den hurtige udvikling, og at det er vigtigt at man forholder sig til de positive såvel som de negative effekter, teknologien kan have på borgere i pleje- og omsorgssektoren, og ydermere hvor man bør sætte den etiske grænse.Som et eksempel på dette fortæller Fabricius, at det i forhold til Paro er vigtigt at finde ud af, hvad man kan nå den demente med: ”Paro kan man jo ikke anvende ukritisk. (…) Man arbejder (igennem demenskurset, red.) med sig selv. Man ændrer sin tilgang til borge-ren. Det er borgerens mål man skal opnå, ikke personalets” (Interview, Fabricius, B., 2012: 07m26s). Altså skal Paro fungere som et pædagogisk middel til at komme i kontakt med den demente, og ikke implementeres for at spare personaletimer.
”I forhold til udviklingen (af velfærdsteknologi, red.), skal der virkelig indtænkes hvor-dan disse skal anvendes i respekt med den enkelte – altså i forhold til integritet. (...) Det er vigtigt at have med, så man ikke krænker den enkelte.” (Interview, Fabricius, B., 2012: 10m33s)
Som et andet eksempel fortæller Fabricius, at hun netop har været til velfærdsteknolo-gimesse i Århus, hvor en telekommunikations-robot til hjemmeplejen blev præsenteret. Meningen med robotten er, at hjemmeplejen skal kunne kommunikere med den hjem-meboende igennem denne. ”Her stod jeg totalt af. Der manglede et link til praksis. (...) Der er intet pædagogisk i at en stemme taler til én igennem en dukke” (Interview, Fabricius, B., 2012: 05m53).

35
3.3.5.2 Lone Birk, SOSUDa vi som en del af vores empiriindsamling deltog i et demenskursus i Hillerød, kom vi i kontakt med Lone Birk (Birk), som er uddannet Social- og Sundhedsassistent, og som det seneste år har arbejdet på en demensafdeling, hvor hun også arbejder inden for psy-kiatrien. Som noget af det første understregede Birk vigtigheden af, at hjælperen er ble-vet undervist i brugen af Paro, og at hun mener, at det er vigtigt med klare retningslinjer for at undgå misbrug.
Birk fortalte, at hun blev introduceret til brugen af Paro som redskab af en medarbejder, som havde været på et certificeringskursus:
”Hun fortalte mig meget om etiske retningslinjer og at man faktisk også skulle gøre bebo-eren opmærksom på at det er et mekanisk dyr. Hun fortalte om hvornår man måtte bruge den, og at man netop ikke måtte bruge den som et redskab til bare at lade dem (bebo-erne, red.) sidde alene med den. Man skal være med, og der skal være en klar pædagogisk hensigt. Man skulle være velovervejet når man brugte den” (Interview, Birk, L., 2012: 01m09s).
Magtanvendelse, og hvordan man undgår dette, var et af dagens emner på demenskurset, og dette viste sig også at være relevant i forhold til Paro. Flere kursister havde oplevet, at Paro havde været et godt redskab til at undgå magtanvendelse, navnlig i situationer hvor plejerne skulle hjælpe demente med personlig hygiejne. Paro var i disse situationer blevet brugt som redskab til at opnå beboerens samtykke: ”Et eller andet sted er det jo lidt mani-pulerende (...) så får man flyttet fokus fra, at borgeren egentlig ikke har lyst til at blive vasket” (Interview, Birk, L., 2012: 05m13s). Dog fortalte Birk at hun personligt synes, at ”(...) det er en god ide, frem for at bruge magtanvendelse” (Interview, Birk, L., 2012: 05m13s).
I forhold til hvordan teknologi i stigende grad bliver brugt i pleje og omsorgssektoren, mener Birk, at ”(...) det er den rigtige vej at gå, hvis man netop har de etiske overvejelser med i hvad man bruger, og at beboeren eller patienten selv får indflydelse på om det er godt for dem” (Interview, Birk, L., 2012: 11m47s). Ifølge Birk har personalet en rigtig stor for-pligtelse til, at vurdere om det er etisk rigtigt at benytte Paro i den givne situation, så den ikke bliver brugt som en ”pasningsordning” (Interview, Birk, L., 2012: 11m47s).

36
TEORI
Når nye teknologier, som for eksempel Paro, udvikles, vil de være præget af krav og kontroverser fra aktører, og dette er en central del af udviklingen.
”

37
4. TEORI
I dette afsnit vil vi gennemgå og beskrive de teorier, vi har valgt at inddrage i projektet. Dette skal give os en indsigt i begreberne og analyseredskaberne inden for de forskellige teorier, så vi kan anvende disse på vores indsamlede empiri i analysen. 4.1 TeknologianalyseI dette kapitel beskrives SCOT-analysens nøglebegreber, og hvordan vi benytter model-len til at afdække robotsælen Paros kompleksitet som artefakt i et socioteknisk system. SCOT er vores metodiske udgangspunkt, idet grundlaget for vores analyse er en række kvalitative interviews, blandt andet med centrale aktører som har med demente borgere og Paro at gøre, samt avisartikler mv. (Se kapitlet ’metode’). Denne empiri belyser de for-skellige aktørers subjektive oplevelser og holdninger til Paro, og ved at analysere hvilke betydning aktørerne tillægger Paro, kan vi få en samlet forståelse for robottens udvikling og kompleksitet (Jørgensen et al., 2009: s. 40). I kapitlet gør vi brug af bogen “I Teknolo-giens Laboratorium – Ingeniørfagets videnskabsteori” af Jørgensen et al. (2009).
4.1.1 Hvad er SCOT?SCOT, eller ’Social Construction of Technology’, er en socialkonstruktivistisk teori, som blev udviklet i 1980’erne af blandt andre Wiebe Bijker. I den socialkonstruktivistiske forforståelse ligger, at en teknologi skal ses som en social konstruktion, og som derfor argumenterer for, at teknologier, som eksempelvis Paro, er et resultatet af forskellige ak-tørers involvering i design- og brugerprocesser (Jørgensen et al., 2009: s. 40).
4.1.2 NøglebegreberGruppen fremhæver i det følgende afsnit de begreber fra SCOT, som vi mener er rele-vante i forhold til at nå frem til en fyldestgørende beskrivelse af forståelsen af Paro. Vi vil bruge disse begreber som udgangspunkt for en teknologianalyse af den indsamlede empiri senere i rapporten.
4.1.2.1 AktørerSom beskrevet kort ovenfor, er SCOT en socioteknisk analyse, som er aktørbaseret. Det er derfor afgørende, at vi finder frem til aktører, der har en forskellig viden, omgang el-ler konkret erfaring med Paro, og som kan bidrage til forståelse af fænomenet, da: ”Disse erfaringer vil omsættes i meget konkrete erfaringer og dermed betydninger, som kan tillægges produktet” (Jørgensen et al., 2009: s. 43). I den forbindelse er det ikke udelukkende Pa-ros funktionelle egenskaber, som er interessante, men også æstetiske eller følelsesmæssige problemer er vigtige at inddrage. Det centrale er, at vi formår at identificere, hvordan og med hvilke argumenter, de forskellige aktører beskriver Paro og ikke blot at finde frem til, om de er for eller imod (Jørgensen et al., 2009: s. 44).

38
“Selve spørgsmålet om at virke/ikke-virke er noget der skal forklares: Hvem virker den for? Hvem virker den ikke for? I hvilke situationer, hvordan, hvornår?” (Jørgensen et al., 2009: s. 45).
Den betydning, som aktørerne tillægger Paro, vil derfor ikke nødvendigvis være enty-dig, men kan forventes at være flertydig, og alle der er med til at udvikle, fremstille eller bruge Paro, eller som indirekte er påvirket af robotten, kan være med til at tillægge den egenskaber og betydning i en samlet socialkonstruktivistisk forståelse (Jørgensen et al., 2009: s. 40-43). Gruppen har i empiri-afsnittet beskrevet de aktører, som vi har valgt til inddragelse i analysen.
4.1.2.2 Relevante sociale grupperBegrebet relevante sociale grupper (RSG) bliver også introduceret i SCOT-analysen og bruges om en gruppe, som deler den samme opfattelse af en teknologi: “Grupper af ak-tører, der tilskriver den samme betydning til en teknologi eller et produkt, kaldes relevante so-ciale grupper” (Jørgensen et al., 2009: s. 45). Det kan være personer, grupper af personer,
institutioner, organisationer eller andre berørte aktører, som ikke eksisterer forud for en teknologis udvikling, men som: ”(…) udspringer af aktørernes omgang med og hand-linger i forhold til dem” (Jørgensen et al., 2009: s. 46). For at vi i projektet bedst kan få udbytte af inddelingen af disse RSG’er, er det altså vigtigt, at vi går i dybden med bestemmelsen af de betydninger, som disse grupper tillæg-ger Paro. Ved at analysere aktørernes forhold til udvikling og brug af Paro er det muligt at identificere, hvilke betyd-ninger de har for robotten. Først herefter kan vi opstille de RSG (Jørgensen et al., 2009: s. 45).
4.1.2.3 Fortolkningsmæssig fleksibilitetHvis der eksisterer flere forskellige RSG’er ved et artefakt kan det konkluderes, at teknologien er fortolkningsmæs-sigt fleksibelt. Fordi teknologien kan have forskellige be-tydning for forskellige grupper. Se figur 2 til venstre.“En teknologi eller et produkt vil fortsat kunne komme i be-røring med nye aktører og nye situationer (...)” (Jørgensen et al., 2009: s. 47). Dette betyder, at nye betydninger for
artefaktet kan opstå, og at forskellige aktører derfor fortolker og anvender teknologier forskelligt. Det kan samtidig betyde, at et produkt på et tidligere tidspunkt kan have
FORTOLKNINGSFLEKSIBILITET
Fortolkningsmæssigt fl
eksi
belt
arte
fakt
Betydning
Betydning
Betydning
RSG1
RSG2
RSG3 Fig. 2

39
været genstand for kontroverser eller diskrepanser, fordi forskellige RSG’er ikke tillagde teknologien samme betydning.
4.1.2.4 StabiliseringNår nye teknologier, som for eksempel Paro, udvikles, vil de være præget af krav og kon-troverser fra aktører, og dette er en central del af udviklingen. Når aktørerne med tiden deler fælles opfattelse eller betydning af en teknologi, betegnes det som en ‘stabilisering af teknologien’. RSG’er kan altså nå til enighed om, og fælles accept af, hvordan tek-nologien eller dele af teknologien skal fortolkes, og hermed mindskes fortolkningsflek-sibiliteten: “(...) vi ser også, at disse kontroverser ofte aftager over tid, og teknologien finder en forholdsvis stabil betydning og udformning” (Jørgensen et al., 2009: s. 50). Her er det vigtigt at tilføje, at en stabilisering hverken er permanent eller fuldkommen: “Uenighed og kontrovers kan genopstå, og den fortolkningsmæssig fleksibilitet kan igen komme til at gøre sig gældende” (Jørgensen et al., 2009: s. 52).
4.1.2.5 Teknologisk rammeBegrebet teknologisk ramme er en række faktorer, der danner en ramme om en given teknologi. Der hører en bestemt ramme til en bestemt RSG, og Bijker definerer det såle-des: “En teknologisk ramme omfatter alle de elementer, som influerer på interaktionen inden for en relevant social gruppe og leder til tilskrivningen af betydning til tekniske artefakter (...)” (Jørgensen et al., 2009: s. 54). En teknologisk ramme er altså et begreb, der beteg-ner de årsager, der ligger til grund for, hvorfor en RSG fortolker en teknologi på en given måde (Jørgensen et al., 2009: s. 55).
4.1.2.6 InklusionDet er dog vigtigt at have in mente, at aktører i en RSG – inden for samme teknologiske ramme – ikke er ens. Nogle vil være bedre til at beskrive eller forklare forståelsesram-men end andre, og begrebet fortæller derfor i hvor høj en grad, aktørerne er styret af den måde, de forstår teknologien på. Aktører med høj inklusion i en given teknologisk ramme vil således være bedre til at forstå og tillægge teknologien betydning end aktører med lav inklusion (Jørgensen et al., 2009: s. 56).

40
4.1.3 SCOT i projektet
Ovenstående har givet os en forståelse for begreberne inden for SCOT, og disse kan inddra-ges i analysen, når vi skal vurdere betydningen af robotsælen Paro i en socio-teknisk forstå-else. Det er målet, at vi ved at analysere robotten ud fra disse begreber, kan vurdere, hvilken udvikling og betydning robotsælen Paro er blevet påvirket af, og endeligt kan vi derved bedst kortlægge, med hvilke overvejelser udviklere af fremtidige sociale robotter skal gøre sig:
“Hvis man som ingeniør eller designer er i stand til at analysere teknologi som en del af et sammenvævet netværk af aktørbestemte tilskrivninger af betydning, bliver man bedre til at kortlægge og inddrage disse i udviklingen af nye teknologier og løsninger.” (Jørgen-sen et al., 2009: s. 41)
4.2 Teknologi-EtikI forbindelse med den teknologiske udvikling, opstår flere etiske problemstillinger og normative spørgsmål. Det være sig både i et fremadrettet perspektiv; om en given tekno-logisk udvikling er ønskelig – men ligeledes også overvejelser om en udviklet teknologi bør bruges og hvordan. I forbindelse med udviklingen af sociale robotter til demente, vil vi derfor inddrage og senere gøre brug af teknologi-etik, for at analysere og vurdere bru-gen af Paro, for at finde frem til en generel viden om hvilke etiske overvejelser, der bør gøres i den fremtidige udviklingen af sociale robotter til demente borgere.
4.2.1 Hvad er teknologi-etik?Teknologietikken udspringer fra den anvendte etik, og handler om hvordan der i eti-ske problemstillinger i forbindelse med teknologi, bør handles. Det er i disse norma-tive spørgsmål nødvendigt at have en systematisk metode til at diskutere disse etiske problemstillinger. Som lektor i praktisk filosofi, Thomas Søbirk Petersen, fortæller, er teknologietik: ”Studiet af etiske overvejelser i forhold til udviklingen og anvendelsen af tek-nologiske produkter” (Petersen, 2012: s. 8). Etiske spørgsmål kan diskuteres og analyseres ud fra flere videnskabelige og filosofiske vinkler. Den systematiske diskussion af en etisk problemstilling har blandt andet til formål at finde det rationelle grundlag for en given etisk holdning. Ved at finde frem til den handling, beslutning eller holdning, som har de stærkeste rationelle argumenter, finder man altså frem til den handling, beslutning eller holdning, som har det stærkeste rationelle grundlag.
”Lidt enkelt sagt er antagelsen, at vi bør træffe de beslutninger, eller handle på de må-der, som de stærkeste grunde taler for. Filosoffens opgave består derfor i at præsentere og afprøve de argumenter, de kan gives for og imod løsninger af etiske problemer.” (Ryberg, 2008: s. 115)

41
Vi vil her fremhæve det rationelle grundlag i en given etisk diskussion, da ”(...) en kon-struktiv dialog om etiske problemstillinger, forudsætter at man ved, hvorfor folk har bestemte etisk holdninger” (Petersen, 2012: s. 11). Derfor er det først og fremmest essentielt at vide, hvad der ligger til grund for en etisk holdning – for eksempel skal der begrun-des om man er for eller imod sociale robotter til demente. Denne grund for en etisk holdning kaldes den etiske værdi (Petersen, 2012: s. 11). Forskellige etiske teorier tager udgangspunkt i at fortælle noget mere generelt om, hvordan der bør handles (Petersen, 2012:11), og der kan derfor gøres brug af disse til analyse og vurdering af normative spørgsmål og/eller holdninger hertil. Vi vil i vores projekt gøre brug af den konsekven-tialistiske etiske teori; utilitarismen, til at analysere og vurdere brugen af Paro, for at finde frem til en generel viden om hvilke etiske overvejelser der bør gøres i fremtidig udviklin-gen af sociale robotter til demente borgere.
4.2.1.1 UtilitarismenI moralfilosofien findes to overordnede etiske teorier, henholdsvist; konsekventialismen og deontologien. Vi vil i det følgende tage udgangspunkt i utilitarismen, en variant af konse-kventialismen, og redegøre overordnede og grundlæggende principper. Vi inddrager og gør udelukkende brug af den utilitaristiske tilgang, da vi ser denne som værende yderst anvendelig til systematisk at vurdere og måle brug og implementering af Paro. Utilitarismen kaldes også for nytteetikken og er en universel etisk teori, som bygger på tre grundlæggende principper: konsekventialisme, nytte- eller velfærdsprincippet og summa-tionsprincippet (Føllesdal et al., 1992: s. 243). Med udgangspunkt i disse tre principper vil vi i det følgende give en forståelse for utilitarismen som tilgang til systematisk diskus-sion af en etisk problemstilling. Det første princip utilitarismen bygger på, er konsekventialismen. Her afhænger rigtig-heden af en handling, af dennes konsekvenser (Føllesdal et al., 1992: s. 238). Dog skal der skelnes mellem konsekventialismen som beslutningsprocedure eller som rigtigheds-kriterium. Som beslutningsprocedure ligger rigtigheden af en handling i de forventede konsekvenser og ikke de faktiske konsekvenser (Føllesdal et al., 1992: s. 240). Derfor vil udgangspunktet for en etisk vurdering af implementering og brug af sociale robotter til demente, være de forventede konsekvenser heraf. For eksempel vil implementeringen være moralsk og etisk korrekt, hvis og kun hvis det kan forventes, at følgerne er de bed-ste for individers velfærd. Som et rigtighedskriterium tager konsekventialisme dog ud-gangspunkt i, at rigtigheden af en handling findes i dennes faktiske konsekvenser. Altså vil implementering og brug af sociale robotter være moralsk og etisk korrekt, hvis og kun hvis dette har de bedste faktiske konsekvenser for individers velfærd. Fælles for begge er dog, at rigtigheden af en handling findes i konsekvenserne.

42
En handling eller beslutnings konsekvenser har forskellig værdi, og i utilitarismen define-res denne værdi i form af nytte- eller velfærdsprincippet, hvor:
”(…) den eneste værdi, der har betydning for vurderingen af en handlings rigtighed, er den nytte eller velfærd, som handlingen frembringer. Ingen andre værdier har betyd-ning.” (Føllesdal et al., 1992: s. 243)
Her knyttes der dog et filosofisk spørgsmål; hvad er velfærd? Her forholder filosofien sig til hvad kriteriet for et godt liv er, og ej hvordan det gode liv opnås (Petersen, 2012:18). I utilitarismen finder man flere varianter af hvad kriteriet for velfærd er, herunder hedo-nistisk- (Bentham), eudaimonistisk- (Mill), ideelle- (Moore) og præferenceutilitarisme (Harsanyi). Varianten, de fleste moderne utilitarister tilslutter sig, er præferenceutilita-risme, som definerer kriteriet for velfærd afhængigt af størrelsen af hvor mange ønsker eller præferencer der opfyldes (Føllesdal et al., 1992: s. 242). For at kunne vægte mængden af den definerede velfærd, tager utilitarismen udgangs-punkt i summationsprincippet. Her lægges vægt på den samlede størrelse af velfærd/nytte af en handlings konsekvenser. ”Positiv nytte minus negativ nytte (smerter, omkostnin-ger og andre negative konsekvenser)” (Føllesdal et al., 1992: s. 242). Derfor tager utilita-risme heller ikke, i normal forstand, hensyn til fordeling af velfærd og goder, men blot mængden af denne. Dog mener utilitaristen og berkeley-økonomen John Harsanyi, at der bør suppleres med et retfærdighedsprincip, ”(…) så en retfærdig fordeling af goderne er en selvstændig værdi ved siden af den nytte, der skal maksimeres” (Føllesdal et al., 1992: s. 243). Utilitarismen er en tilgang, som giver mulighed for systematisk diskussion af normative etiske spørgsmål, som endvidere giver mulighed for upartiskhed i vurdering af etiske spørgsmål, da alle individers lige interesser tæller lige meget. Derudover er der mulighed for personrelateret etik, hvor referencer til Gud, monarki etc. ikke gør sig gældende.
4.2.2 En model for overvejelse og valgSammen med utilitarisme som tilgang, kan der gøres brug af et rammeværktøj til syste-matisk vurdering af etiske problemstillinger som vi i det følgende vil beskrive, ”En model for overvejelse og valg” (Føllesdal et al., 1992: s. 232-236). Denne model består af to trin: 1) Først skaber man en oversigt over de mulige handlingsalternativer. 2) Dernæst skabes en opregning af konsekvenserne af disse alternativer. Dermed afhænger beslutningen om, hvilken handling der er mest moralsk og etisk korrekt af: a) Hvordan forholder alternati-verne sig til forskellige moralske normer, b) Hvilken værdi alternativerne har, og c) Hvil-ken sandsynlighed er der for at konsekvenserne opstår, ved de forskellige handlingsalter-nativer (Føllesdal et al., 1992: s. 233). Denne etiske beslutningsteori kan derfor opdeles i en kronologisk rækkefølge:

43
1) Opstil handlingsalternativer som er relevante (notation: Ax),2) Oplist konsekvenserne for disse alternativer (notation: Kx), 2a) Vurder hvordan handlingsalternativerne forholder sig til forskellige moralske normer 2b) Vurder alternativernes værdi 2c) Vurder og undersøg hvad sandsynligheden for at Kx indtræffer
4.2.3 Vores etiske værktøjskasseVi har til formål med den senere etiske analyse at give en vurdering af konsekvenserne af implementeringen af Paro. Derfor tager vi udgangspunkt i ”En model for overvejelse og valg” til systematisk diskussion og vurdering, men opstiller i det følgende vores egen etiske værktøjskasse. Vi opstiller implementeringens faktiske konsekvenser og vurderer og diskuterer hvordan disse forholder sig til moralske normer fra utilitarismen, hvor vær-dien findes i konsekvensernes nytte/velfærd. Vi definerer endvidere, ud fra præference utilitarismen, kriteriet for velfærd afhængigt af mængden af ønsker eller præferencer der opfyldes. Vi vil i den etiske analyse fokusere på den faktiske handling – at Paro er blevet implementeret – og dennes faktiske konsekvenser. Det har vi gjort for ikke at skabe en etisk diskussion ud fra hypotetiske og forventede konsekvenser, og ikke for at vurdere handlingen ud fra et rigtighedskriterium. Af samme grund, kommer vi heller ikke til at vurdere og undersøge sandsynligheder for at konsekvenserne indtræffer. Derfor har vi ikke flere handlingers totalsum af nytte at stille op overfor hinanden og derved afgøre den mest korrekte handling. Vi vil til gengæld vurdere og diskutere de faktiske konse-kvenser overfor scenariet af, at implementeringen ikke var sket. Dette har til formål at hjælpe os til at forstå værdien af de faktiske konsekvenser af implementeringen af Paro, og derved give mulighed for at opstille disse som etisk og moralsk positive eller negative, ud fra et rationelt grundlag. Af den grund vil vores egen værktøjskasse/fremgangsmåde være som følger:
1) Opstilling af handlingens faktiske konsekvenser2) Vurdere og diskutere hvordan konsekvenserne forholder sig til moralske normer 2a) Vurdere konsekvenserne værdi 2b) Opstille negative og positive moralske konsekvenser
Alt dette har til formål at opnå en generel viden om etiske og moralske overvejelser i for-bindelse med udviklingen af sociale robotter til demente.

44
ANALYSE
At Paro fortolkes forskelligt, kan betyde, at der opstår kontroverser og diskrepanser mellem aktører med forskellig forståelsesramme.
”

45
5. ANALYSE
5.1 Teknologianalyse ud fra SCOT
Vi har i projektet valgt at basere vores analyse af Paro på analysemetoden SCOT, der gi-ver os en række redskaber til at forstå de forskellige sociale og tekniske relationer. Denne sociotekniske analyse hjælper os til at opnå en socialkonstruktivistisk teknologiforståelse, hvor de involverede sociale aktørers forståelsesrammer undersøges og analyseres. Vi tager i vores analyse udgangspunkt i Paro som en social konstrueret teknologi, som er blevet ændret over tid, på baggrund af de grupper af aktører, der er involverede i både design- og brugsprocessen. Målet med følgende er derfor at belyse, hvordan Paro er gået fra at være tiltænkt som et alternativ til et kæledyr i private husstande i Japan, til at være et hjælpemiddel til demente borgere.
Først vil vi opdele Paros udvikling i forhold til centrale udviklingsstadier og centrale aktørers påvirkning heraf. Derefter vil vi dele de centrale aktører op i relevante sociale grupper ud fra deres overordnede forståelsesramme, og endvidere vil vi undersøge Paro som en fortolknings fleksibel teknologi. Endeligt vil vi definere de forskellige aktørers forståelsesramme, i forhold til deres påvirkning af – og holdning til – Paros brugsmæs-sige og teknologiske udvikling.
5.1.1 Tidsperspektiv over udviklingsstadierModellen på næste side har gruppen konstrueret med det formål at skabe et overblik over de stadier og aktører, der vurderes at være centrale i Paros teknologiske- og brugs-mæssige udvikling. Modellen giver et kronologisk tidsperspektiv over, hvornår de cen-trale aktører og stadier har haft indvirkning på udviklingen af Paro (Figur 3).

46
1) P
ARO
SOM
KÆ
LEDY
R I J
APAN
2) P
ARO
TIL
DEM
ENTE
I D
ANM
ARK
‘Væ
r Try
g-pr
ojek
t’Kø
benh
avns
Kom
mun
e
‘Pro
jekt
Par
o’Te
knol
ogis
kIn
stitu
t
3) P
aro
til b
ørn
med
AD
HD
?
4) U
dvik
lings
hæm
med
e?
1993
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
Ca. 2
00Pa
ro’e
ri D
anm
ark
Ca. 1
000
Paro
’er
i Jap
an
“PRO
JEKT
-PAR
O” s
tart
erpr
ofes
sion
alis
ere
brug
en a
f ve
lfærd
srob
otte
r som
Par
o.
Kurs
er m
v. ‘A
lmin
delig
e’ p
leje
-hj
em o
g ku
rsis
ter/
plej
ere
brug
er P
aro.
Test
s vi
ser a
t Pa
ro h
ar te
ra-
på æ
ldre 50
-60
velfæ
rdst
ek.
unde
rsøg
es i
‘Væ
r Try
g-pr
ojek
t’ (F
ørst
e m
øde
med
Par
o)
Impo
rt a
f 12
Paro
’er
til te
st m
ed d
emen
te
i Dan
mar
k, b
l.a.
Plej
ehj.
Høj
deva
ng.
Robo
tten
test
es m
edæ
ldre
af N
atio
nal I
nsti-
tute
of A
dvan
ced
Indu
s-tr
ial S
cien
ce a
nd T
ech-
nolo
gy (A
IST)
Paro
udv
ikle
s og
an
vend
es a
fja
pans
ke b
orge
reso
m s
ubst
itut f
or
kæle
dyr
Ca. 1
00Pa
ro’e
ri D
anm
ark
Fig.
3, P
aros
udv
iklin
g

47
5.1.2 Aktørernes forståelsesrammeFor at forstå de enkelte aktørers påvirkning af Paros brugsmæssige og teknologiske ud-vikling, skal vi forstå deres krav til denne udvikling. Vi skal forstå disse krav i forhold til deres forståelsesramme af Paro, for at vide hvorfor de stiller disse krav til den brugsmæs-sige og teknologiske udvikling, og hvordan de har gjort og gør dette. En oversigt kan findes på side 52, hvor figur 5 viser forståelsesrammerne for de forskellige aktører.
5.1.3 Centrale aktører
5.1.3.1 OpfinderDr. Takanori Shibata (Shibata) ønskede oprindeligt, at Paro skulle frembringe erin-dringer om børn og kæledyr, da den skulle bruges af mennesker, som ikke kunne holde husdyr. Dette var derfor Shibatas oprindelige forståelsesramme af Paro. Denne ramme stillede krav til teknologien, om at den skulle efterligne kæledyr og børns egenskaber ved bevægelse og lyd og derved appellere til at blive vist omsorg
Efter at Paro var blevet udviklet og blev brugt som kunstigt kæledyr, fik man i 2004 vi-denskabeligt bevist, at Paro kunne benyttes som terapeutisk værktøj. Dette førte til en ny forståelsesramme af Paro som velfærdsteknologi, som Shibata, som udvikler, derfor også blev en del af. Denne ramme stillede nye krav til teknologien. Da Paro blandt andet fungerede som erstatning for brug af rigtige kæledyr, måtte Shibata se på de uønskede sideeffekter ved brug af rigtige dyr, og undgå disse i designet af Paro. For eksempel skulle pelsen derfor være bakterieafvisende og den måtte ikke kunne gøre fysisk skade på bru-geren.
På samme måde skal Shibata i den fremtidige udvikling af Paro, forholde sig til nye for-ståelsesrammer, hvis brugen af Paro udvikler sig til andre områder i plejesektoren end de-mente borgere, som f.eks. borgere med ADHD. Dette udledes blandt andet af følgende citat:
”For tiden er jeg i gang med at udvikle nye programmer, der tilpasser Paro helt præcist til bestemte grupper af mennesker, fordi jeg har fundet ud af, at Paro skal reagere ander-ledes på demente end på børn med ADHD” (D. Svane-knudsen, 2012).
Opfinderens inklusion i forståelsesrammen af Paro, som et kæledyr, var fra begyndelsen høj. Men i takt med at han er blevet påvirket af en anden forståelsesramme, har han bevæget sig mod at være højere inkluderet i den nye forståelsesramme af Paro som en velfærdsteknologi. Denne inklusion styrer, hvordan han tænker og handler indenfor den teknologiske ramme.

48
5.1.3.2 De japanske brugereVi har tidligere omtalt familien Shimura og fru Hirakawa, som vi inddragede som speci-fikke eksempler på brugere af Paro i Japan. Disse brugere hører til den relevante sociale gruppe 1 (se model), som ser Paro som værende et substitut for et levende kæledyr. Denne placering og forståelse af de japanske brugere, udleder vi blandt andet af følgende citat: ”Many pets give us a lot of joy, but we have to face sore bereavement” (Living with Paro, 2006: 1m55s)
Fælles for disse implicerede aktører er, at de ser Paro som et rigtigt kæledyr, og tillægger Paro den samme funktion og værdi, som man ville tillægge et levende kæledyr. Dette skaber en række krav til Paro, rent teknologisk. For eksempel er det vigtigt for denne gruppe aktører, at Paro kan reagere på stemme og berøring, altså at den har evnen til at give feedback på aktørernes handlinger og interaktioner med den. Denne sociale gruppe tillægger altså blandt andet en stor værdi i troværdighed, og at Paro skal være i stand til at ’føle’. De japanske brugere har været og er højt inkluderet i forståelsesrammen af Paro som et kæledyr, da de udelukkende ser Paro som et kæledyr og et substitut for levende dyr. Dette styrer, hvordan de tænker og handler indenfor den teknologiske ramme.
5.1.3.3 Lone Gaedt og Teknologisk Institut I et teknologianalytisk perspektiv anses Gaedt fra Teknologisk Institut for at være en meget central aktør, da hun har stor indsigt i både teknologi og brug, og endvidere er højt inkluderet i Paros udvikling, da hun til dels, i kraft af hendes samarbejde med de japanske udviklere, har indflydelse på Paros teknologiske udvikling og endvidere på ud-viklingen af brugen i forbindelse med kurser og certificering. På baggrund af hendes ud-dannelse, arbejdserfaringer med demente borgere, og som den første i verden til at teste Paro som velfærdsteknologi, er hendes indsigt og de betydninger hun tillægger Paro, en essentiel del af RSG 2. Robotsælen er for Gaedt et stykke avanceret teknologi, der kræver uddannelse og brugsmæssig omtanke. Brugen af Paro indeholder nemlig, ifølge Gaedt, rigtig mange etiske, sociokulturelle og pædagogiske aspekter. For Gaedt er Paro et mid-del som, hvis det bruges korrekt, kan løse udfordringer i plejesituationer eller i et om-sorgsfelt. Dette udledes blandt andet fra følgende citat om hvordan hun mener midlerne skal fordeles i udviklingen af sociale robotter:
”(…) 20% af midlerne medgår til selve teknologien, og de sidste 80% på implemente-ring (støtten). Det giver opmærksomhed til faglig-professional implementering, og bidra-ger til at skabe motivation hele vejen rundt.” (Interview, Gaedt, L., 2012)
På baggrund af alle disse værdier er det tydeligt at se, at hun er af den holdning, at det for fremtiden er altafgørende at fokusere fuldt ud på slutbrugeren i udvikling af sociale robotter til demente. Ud fra dette må vi antage, at hun er interesseret i at minimere

49
undervisningsbehovet, og ydermere interesseret i at de teknologier, der bliver udviklet på området, ikke kan bruges forkert. Gaedt er højt inkluderet i forståelsesrammen af Paro som en velfærdsteknologi, og er i høj grad styret heraf. Hun er dog bekendt med Paro som et substitut for levende dyr, men denne meget lave inklusion i denne forståelses-ramme, ser vi ikke som værende styrende for, hvordan hun tænker og handler.
5.1.3.4 Paro-doktor Karsten AhrentsenFor Ahrentsen er Paro et stykke teknologi, som han igennem sin profession i høj grad tillægger en teknisk forståelse. Ahrentsen har et direkte indblik i, hvad Paro består af rent teknologisk, og dette bevirker, at han har en forståelse for, hvad der teknisk fungerer og vigtigere endnu, hvad der ikke gør. Ahrentsen lægger, qua sit arbejde, blandt andet en stor værdi i teknisk såvel som betjeningsmæssig holdbarhed, da han har observeret at slutbrugerne af denne slags velfærdsteknologi, kan være meget hårdhændede i deres an-vendelse. Han argumenterer derfor at: “Slutbrugerne af velfærdsteknologi kan i visse tilfælde være meget hårdhændede og måske gøre ting der ikke var forudset” (Email, Ahrentsen, L., 2012). Denne holdning og disse krav, er altså styret af hans forståelsesramme. Ahrentsens inklusion i forståelsesrammen af Paro som en velfærdsteknologi er høj, hvilket i høj grad styrer, hvordan han tænker og handler indenfor den teknologiske ramme. Han er dog, ligesom Gaedt, bekendt med Paro som et substitut for levende dyr, men igen ser vi at denne meget lave inklusion i denne forståelsesramme ikke er styrende for, hvor-dan han tænker og handler.
5.1.3.5 PlejepersonaletFor plejepersonalet er Paro et stykke velfærdsteknologi, som fungerer som et redskab til det pædagogiske arbejde med demente borgere. Denne opfattelse udgør denne gruppe ak-tørers forståelsesramme. Disse er i høj grad inkluderet i denne forståelsesramme, hvor Paro ses som en velfærdsteknologi. Denne forståelsesramme kan blandt andet udledes fra føl-gende citat: ”Rent kognitivt sætter det noget igang hos dem (…) der kommer en kommunikation igang (…) der er mange små sidegevinster ved at have Paro liggende” (Interview, Rasmussen, h., 2012: 10m20s). Her ligges vægt på den terapeutiske effekt af at benytte Paro i plejearbejdet. Denne meget høje inklusion, i forståelsen af Paro som en tera-peutisk velfærdsteknologi, har stor betydning for, deres hold-ning og krav til den fremtidige teknologiske og brugsmæssige udvikling af Paro. Derfor er plejepersonalet til en hvis grad
FIG. 4: Aktørers inklusion
LAV
HØJ
Gaedt,Lone
Ahrentsen,Karsten
Takanori,Shibata
Takanori,Shibata
Pleje-personale
Japanskebrugere
RSG1 RSG2
&

50
også meget enige om centrale krav til den teknologiske udvikling af Paro. Dog er de på visse punkter uenige om udvikling af brugen og har forskellige opfattelse af kurser og certificering.
5.1.4 Relevante sociale grupper – RSGVi har kort beskrevet, hvordan Paro med tiden har udviklet sig, og hvordan vi forstår ro-botten i et socialkonstruktivistisk objektiv. Vi vil nu inddele de centrale aktører i RSG’er, i forhold til de overordnede forståelsesrammer – Paro som substitut for levende dyr eller Paro som velfærdsteknologi til demente borgere (Se figur 6 på side 53).
5.1.4.1 Et substitut for et levende dyrEn af de centrale aktører i udviklingen, og som direkte har påvirket betydningen, er den japanske Dr. Shibata Takanori, som oprindeligt ønskede, at Paro skulle frembringe erin-dringer om børn og kæledyr hos slutbrugeren. I den primære udvikling af Paro var mål-gruppen japanske borgere, som ikke kunne tåle, eller på anden vis ikke havde mulighed for at holde levende dyr. Denne gruppe ser vi som en relevant social gruppe. De forstår og opfatter Paro som værende et ’kæledyr’, og tillægger en række krav og ønsker til Pa-ros funktioner i forhold til forståelsen af denne som et kæledyr. Da over 1000 japanske borgere i dag stadigvæk anvender Paro som substitut for et kæledyr – må vi antage, at de fortsat vil være være en relevant social gruppe for den fremtidige udvikling.
5.1.4.2 En velfærdsteknologi til dementeSelvom robotsælen i et vist omfang har fundet vej til de japanske hjem, blev effekterne af Paro som velfærdsteknologi testet ii Japan fra 2003-2004. Testresultaterne viste, at robot-ten kunne mere end blot at være et kæledyr. Den havde en terapeutisk effekt på testper-sonerne, og danner derved grundlag for endnu en social relevant gruppe: En gruppe der tillægger Paro en anden betydning og funktion – velfærdsteknologi, der kan bruges i ar-bejdet med demente. Her skete en central ændring i holdninger og krav til teknologien, da Paro blev tillagt en ny funktion.
5.1.4.3 Mulige fremtidige RSG’erSom omtalt i forbindelse med Dr. Takanori, er det muligt, at der i fremtiden vil opstå ny brug og derved nye forståelsesrammer. Dette vil skabe nye RSG’er, som følge af deres inklusion i den givne forståelsesramme vil have nye krav og forventninger til den fremti-dige udvikling af Paro.
5.1.5 Fortolkningsmæssigt fleksibel teknologiUdviklingen af Paro er altså blevet påvirket af to relevante sociale grupper: På den ene side de aktører, som ser Paro som et substitut for et kæledyr, og på den anden side de aktører, som ser Paro som en velfærdsteknologi til demente borgere. Dette er bevis på,

51
at Paro som teknologi er fortolkningsmæssigt fleksibel, da de to grupper opfatter og fortolker Paro forskelligt, og teknologien og artefaktet bliver dermed åbent og fleksibelt for fortolkning,. At Paro fortolkes forskelligt, kan betyde, at der opstår kontroverser og diskrepanser mellem aktører med forskellig forståelsesramme. Vi vurderer dog, at der på nuværende tidspunkt er tale om, at de to relevante sociale grupper blot bruger eller forstår Paro forskelligt. Problemer kan hypotetisk set opstå senere når disse forskellige brugspraksisser og opståede rammer for anvendelse udvikles yderligere, eller hvis nye relevante sociale grupper opstår, og der derved skabes nye behov. Betydningen for im-plementeringen og brugen af Paro i Danmark, som velfærdsteknologi, kunne hypotetisk set have været anderledes, hvis Paro også var blevet lanceret som et ’legetøj’. Vi vurderer, at dette kunne have skabt kontroverser mellem de to grupper, da ’seriøsiteten’ af en vel-færdsrobot kunne devalueres for blandt andet plejere og pårørende, hvis Paro, samtidig med at blive benyttet som terapeutisk velfærdsrobot, kunne købes i en legetøjsforretning.
5.1.6 Stabilisering af teknologienI den teknologiske udvikling af Paro ser vi, at der er sket en vis stabilisering af teknolo-gien. Hermed mener vi, at aktørerne på tværs af de relevante sociale grupper, er enige om visse centrale funktioner eller udformning ved teknologien. For eksempel ser vi ikke, at der er uenighed, mellem de to relevante sociale grupper, om hvorvidt Paro skal være afbilledet efter en babysæl.

52
Fig.
5, P
aros
fors
tåel
sesr
amm
e
PARO
GAED
T, L
ONE
– Kr
æve
r udd
anne
lse/
kurs
us–
Avan
cere
t tek
nolo
gi–
Skræ
ksce
narie
er a
lle h
ar d
en–
Kend
e br
uger
en i
arbe
jdet
– Ka
n an
vend
es fo
rker
t –
Etik
er v
igtig
t–
Foku
s på
slu
tbru
ger i
udv
iklin
g–
Paro
er g
od k
valit
et /
bedr
e en
d tø
jdyr
AHRE
NTS
EN, K
ARST
EN–
Kræ
ver u
ddan
nels
e–
Mad
rest
er i
opla
dere
n–
Typi
ske
skad
er e
r fal
dska
der
– Fo
kus
på s
lutb
ruge
r–
Ikke
ers
tatn
ing
for m
enne
skel
ig o
mso
rg
BIRK
, LON
E–
Udd
anne
lse
er v
igtig
t–
Klar
e re
tnin
gslin
ier /
kan
anv
ende
s fo
rker
t–
Paro
er g
odt i
sted
et fo
r mag
tanv
ende
lse
– Et
ik e
r vig
tigt
RUGH
, CH
ARLO
TTE
– P
aro
er d
et e
nest
e til
dem
ente
– Ve
lfærd
stek
nolo
gi e
r til
reha
bilit
erin
g
AND
REAS
EN, S
UN
RID
– Ku
rsus
er v
igtig
t–
Give
r ide
ntite
tsfø
lels
e / o
pmæ
rkso
mhe
d–
Mål
rett
et b
rug
nødv
endi
gt–
Mad
rest
er i
opla
dere
n–
Går i
sty
kker
– Øg
e liv
skva
litet
– Ke
nde
brug
eren
– Ka
n an
vend
es fo
rker
t–
Ikke
ers
tatn
ing
for m
enne
skel
ig o
mso
rg
FABR
ICIU
S, B
ODIL
– Ku
rsus
er v
igtig
t–
Kræ
ver u
ddan
nels
e–
Etik
er v
igtig
t
TAKA
NOR
I, SH
IBAT
A–
Til d
emen
te–
Som
ers
tatn
ing
for d
yr–
Fre
mtid
inde
n fo
r AD
HD
mv.

53
Fort
olkn
ings
mæ
ssig
t flek
sibe
lt ar
tefakt
TAKA
NOR
I, SH
IBAT
A–
AIST
, JAP
AN–
INGE
NIØ
R–
OPFI
ND
ER
TAKA
NOR
I, SH
IBAT
A–
AIST
, JAP
AN–
INGE
NIØ
R–
OPFI
ND
ER
TAKA
NOR
I, SH
IBAT
A
TAKA
NOR
I, SH
IBAT
A
BØRN
MED
AD
HD
PÆD
A GOG
ERLÆ
GER
JAPA
NSK
EBR
UGE
RE
GAED
T, L
ONE
– TE
KNOL
OGIS
K IN
STIT
UT
– EK
SPER
T
RASM
USS
EN, L
ISBE
TH–
HØJ
DEV
ANG
– PL
EJER
PARO
AHRE
NTS
EN, K
ARST
EN–
TEKN
OLOG
ISK
INST
ITU
T–
ROBO
T-EK
SPER
T–
INGE
NIØ
R
LON
E, B
IRK
– SO
SU-A
SSIS
TEN
T–
KURS
ISTS
– PL
EJER
RUGH
, CH
ARLO
TTE
– SO
PU I
HIL
LERØ
D–
ERGO
TERA
PEU
T–
UN
DER
VISE
R (K
URS
US)
AND
REAS
EN, S
UN
RID
– H
ØJD
EVAN
G–
ERGO
TERA
PEU
T–
PLEJ
ER
FABR
ICIU
S, B
ODIL
– SY
GEPL
EJER
SKE
– LÆ
RIN
GSKO
NSU
LEN
T –
SOSU
RASM
USS
EN, H
ELLE
– H
ØJD
EVAN
G–
GRU
PPEL
EDER
– PL
EJER
SUBS
TITU
T TI
L KÆ
LED
YR
VELF
ÆRD
S-TE
KNOL
OGI T
ILD
EMEN
TE
RELE
VAN
T SO
CIAL
GRU
PPE
1
RELE
VAN
T SO
CIAL
GRU
PPE
3
UVI
KLIN
GSH
ÆM
MED
EPÆ
DAGO
GER
PLEJ
EPER
SON
ALE
RELE
VAN
T SO
CIAL
GR
UPP
E 4
RELE
VAN
T SO
CIAL
GRU
PPE
2
??
Fig.
6, P
aros
RSG
’er

54
5.2 Etisk analyse af ParoVi har til formål med denne etiske analyse at give en vurdering af konsekvenserne af im-plementeringen af Paro. Derfor tager vi i den etiske analyse udgangspunkt i vores etiske værktøjskasse til systematisk diskussion og vurdering. Vi inddrager moralske normer fra utilitarismen og finder derved, at værdien findes i nytte/velfærd. Vi definerer endvidere, ud fra præference utilitarismen, kriteriet for velfærd afhængigt af mængden af ønsker eller præferencer, der opfyldes. Vi baserer denne analyse på den faktiske handling – at Paro er blevet implementeret – og dennes faktiske konsekvenser. Det har vi gjort for ikke at skabe en etisk diskussion ud fra hypotetiske og forventede konsekvenser. Af samme grund har vi ikke flere handlingers totalsum af nytte at stille op overfor hinanden og derved afgøre den mest korrekte handling. Vi vil til gengæld vurdere og diskutere de faktiske konsekvenser over for det scenarie, at implementeringen ikke var sket. Dette skal i en reflekteret diskussion og vurdering, hjælpe os til at forstå værdien af de faktiske konsekvenser af implementeringen af Paro, og derfor give os et rationelt grundlag for at opstille disse som etisk og moralsk positive eller negative. Dette har til formål at opnå en generel viden om etiske og moralske overvejelser, som udspringer fra reelle erfaringer med Paro, for fremtidig udvikling af sociale robotter til demente.
5.2.1 Faktiske konsekvenser af implementering af Paro
Konsekvenser for den demente borger• Paro giver mulighed for at vise og give omsorg• Terapeutisk og aktiverende effekt• Giver brugeren opmærksomhed fra andre, og form for identitetsfølelse, når
denne bruger Paro.• Kognitiv effekt (Hjælpe de kognitive processer på vej)• Borgere blev forskrækkede og smed Paro væk• Det kan have modsatte effekt end den ønskede, hvis brugeren ikke kan rumme at
give den omsorg robotsælen kræver.• Paro har gjort skade på eksistentielt og emotionelt plan
Konsekvenser for plejen af demente• Har gjort det lettere at nå ind til nogle borgere, som måske har været meget aflukkede• Man har fået et alternativ til magtanvendelse (Undgå magtanvendelse, tidsbespa-
rende)• Spildt arbejdsfortjeneste, ifm. reparation af Paro• Økonomisk udgift (Indkøb af Paro, reparation, kurser, arbejdstid til indkøring og
brug)• Paro bliver ikke brugt alle steder den er købt, pga. travlhed

55
5.2.2 Etisk vurdering og diskussion
Ifølge plejepersonalet og forskning, giver Paro brugerne mulighed for at vise og give om-sorg. At have mulighed for at kunne vise omsorg, er et stort ønske fra de demente bor-gere, som brugen af Paro opfylder. Dette kan man stille over for scenariet, at Paro ikke var blevet implementeret. Her ville der kunne argumenteres for, at der stadig ville være tøjbamser og terapeutiske dukker, som de demente borgere ville kunne benytte sig af. Til dette vil det adspurgte plejepersonale og forskning, fra blandt andre Lone Gaedt, dog sige at Paro gennem, bevægelse og lyd, i højere grad appellerer til borgernes omsorgsgen, ved at give respons på den omsorg, der bliver vist den. Derfor opfylder brugen af Paro her, i højere grad ønsket om at kunne give omsorg, end hvis der ikke blev gjort brug af Paro. To andre faktiske konsekvenser ved brugen af Paro, er dens terapeutiske og aktiverende effekt. Paros lyde og bevægelser holder brugeren opmærksom og modvirker at brugeren falder i søvn, og derved bliver understimuleret. Endvidere virker den terapeutisk ved, at brugeren ofte taler til Paro og derved benyttes og udvikles brugerens kognitive proces-ser. Uden Paro ville det være nødvendigt at gøre brug af andre pædagogiske redskaber til at aktivere borgeren og dennes kognitive processer. I plejearbejdet er aktivering af de demente borgere og deres kognitive processer af høj prioritet. Paro giver mulighed for at opfylde dette ønske. En borger, som sidder med Paro, får ofte opmærksomhed fra andre og det kan øge en social interaktion mellem de demente borgere og endvidere med personalet. Hvis denne effekt skal opnås uden Paro, kræver det et andet emne, som vil kunne starte social in-teraktion. Brugen af Paro opfylder derfor ønsket om at skabe større social interaktion blandt de demente og imellem de demente og plejepersonale. Forkert brug af Paro har dog også været en konsekvens af implementeringen. Nogle bor-gere har ikke været forberedte på Paros funktioner, og er blevet forskrækkede over dens lyde og bevægelser. Andre er blevet frustrerede over, ikke at kunne rumme Paro, eller over ikke at kunne give den krævede omsorg. Dette kan enten være på grund af manglende kognitive evner eller fysiske begrænsninger. Hvis man ikke havde gjort brug af Paro, ville disse konsekvenser været undgået. Da disse konsekvenser ikke kan ses som en præference, der bliver opfyldt, er disse negative konsekvenser ved implementeringen af Paro.Med brugen af Paro er det gjort lettere at nå ind til visse demente borgere, som er meget aflukkede. Det må antages, at personalet ikke vil bruge Paro til at nå ind til aflukkede de-mente borger, hvis en anden måde er lettere eller mere hensigtsmæssig, og derfor kan det vurderes, at Paro kan lette opfyldelsen af ønsket om at nå ind til aflukkede borgere. Plejepersonalet har, i Paro, fået et redskab, som i visse tilfælde, kan bruges til at undgå el-ler mindske brugen af magtanvendelse. Her opfyldes et stort ønske og mål om at undgå

56
og begrænse brugen af magtanvendelser, hvori borgerens ret til selvbestemmelse og inte-gritet overskrides – endvidere kan dette have en tidsbesparende effekt, da andre pædago-giske redskaber, for at undgå brugen af magtanvendelser, kan være mere tidskrævende. Hyppige reparationer af Paro fører til spild af arbejdstid på gentagen indkøring af Paro. Den arbejdsfortjeneste, som går tabt, hver gang Paro skal repareres, er et negativt følge ved implementeringen af Paro, da der naturligvis ikke er et ønske om tabt arbejdsfor-tjeneste. Det kan endvidere ses som en økonomisk belastning at implementere Paro, da dette betyder udgifter til indkøb, reparationer, kurser i brug af Paro og udgift til at der altid skal være en plejer sammen med Paro. Disse midler ville kunne benyttes andetsteds i plejen, hvis Paro ikke var implementeret, og her vil det være nødvendigt at vurdere, hvor midlerne gør mest gavn. I forlængelse heraf er det ikke alle steder, den er anskaffet, at den bliver brugt, hvilket vil sige at midlerne brugt på en Paro, må siges at være spildt, og færre præferencer vil være opfyldt.
5.2.3 Delkonklusion
TeknologianalyseI det følgende vil vi lave en opsamling, og sammenfatte hvad vi uddrager fra vores tek-nologi analyse. Dette er for at danne os et overblik over den forståelse vi herefter vil have af Paro, som en social konstrueret teknologi i et socioteknisk system. Endvidere for at kunne overføre denne viden til overvejelser for fremtidig udvikling af sociale robotter til demente.
• Vi har ved at lave et overblik over tidsperspektivet for Paros udvikling, skabt os en forståelse for centrale begivenheder og aktører.
• Ved at se på centrale aktørers holdninger og tanker i forhold til deres forståelses-ramme af Paro, har vi fået en forståelse for de krav og forventninger, de har til fremtidig teknologisk og brugsmæssig udvikling af Paro. Endvidere har vi ved at vurdere disse aktørers inklusion i givne forståelsesrammer, fået en forståelse for, i hvor høj grad aktørerne er styrede af forståelsesrammen i det respektive RSG’er.
• Vi har ved at se på aktørernes forståelsesrammer, og inklusion i disse, opdelt ak-tørerne i to relevante grupper. Dette har givet os en forståelse for, at der eksisterer to overordnede centrale forståelsesrammer af Paro; velfærdsteknologi til demente og substitut for levende dyr. Endvidere har vi fået en forståelse for, hvilken på-virkning udviklingen af ny brug af Paro vil have for dennes fremtidige udvikling.
• Vi har ved at undersøge forskellige RSG’er og tilhørende forståelsesrammer, for-stået Paro som en fortolkningsmæssig fleksibel teknologi. Derved har vi forstået, at Paro fortolkes forskelligt, hvilket kan betyde, at kontroverser og diskrepanser mellem aktører med forskellig forståelsesramme kan opstå.

57
• Vi har ved at undersøge fælles accepter, på tværs af de relevante sociale grupper, fundet frem til en vis enighed om centrale funktioner eller udformning ved tek-nologien. Hvilket betyder at visse funktioner og kvaliteter ved Paro er stabiliseret.
Etisk analyseVi har i det foregåede lavet en etisk analyse på baggrund af implementeringen af Paro. Vi har opstillet de faktiske konsekvenser og vurderet og diskuteret værdien af disse, i forhold til præference utilitarismen og umiddelbare hypotetiske konsekvenser ved ikke at have implementeret Paro. Ud fra denne vurdering, har vi skabt et rationelt grundlag, for at opstille etiske og moralske, positive og negative konsekvenser ved implementeringen af Paro. Med dette opstiller vi mulige etiske og moralske negative og positive konsekven-ser ved fremtidig udvikling og implementering af sociale robotter til demente, og derfor samtidig mulige konsekvenser der bør overvejes i denne udvikling.
Moralsk og etiske positive konsekvenser• Giver den demente borger mulighed for at vise og give omsorg• Kognitiv og terapeutisk effekt• Aktiverende effekt• Social effekt• Plejepersonalet har fået et redskab til at kunne nå ind til aflukkede demente bor-
gere• Redskab til at undgå magtanvendelse
Moralsk og etiske negative konsekvenser• Afmagt (Hos borgere med fysisk begrænsning. Hos borgere med manglende res-
sourcer til at kunne rumme Paro)• Angst og forskrækkelse• Tabt arbejdsfortjeneste på grund af hyppige reparationer• Økonomisk udgift• Manglende brug efter indkøb

58
KONKLUSION

59
6. KONKLUSION
6.1 Konklusion og overvejelser
Vi har i denne projektrapport arbejdet imod at opstille en række etiske og moralske over-vejelser, der i fremtiden bør gøres, i udviklingen af sociale robotter til demente.
Udviklingen af velfærdsteknologier fremstår som en umiddelbar selvfølgelig del af den teknologiske udvikling. Når vi ser på det teknologiske fænomen, social robot til de-mente, ser vi dette ud fra en socialkonstruktivistisk videnskabsteoretisk tilgang, som bevirker, at vi forstår denne teknologi som social konstrueret. Her har vi i projektet taget fat i en normali, og kritisk problematiserer Paros brugsmæssige og teknologiske udvik-ling, som ellers er taget for givet. Når der udvikles ny velfærdsteknologi og brug heraf, opstår der både en lang række etiske og teknologiske overvejelser, som bør foretages. Disse overvejelser indgår dog nødvendigvis ikke som en selvfølgelig del af den faktiske udvikling af ny velfærdsteknologi. Derfor har vi arbejdet frem imod at besvare problem-formuleringen:
Hvilken betydning kan det forventes at den sociale konstruktion og implemente-ring af Paro kan have for etiske og moralske overvejelser for fremtidig udvikling af sociale robotter til demente?
Vi kan på baggrund af vores teknologianalyse af anvendelsen af Paro konkludere, at den teknologiske og brugsmæssige udvikling af Paro, i høj grad har været påvirket af de im-plicerede relevante sociale grupper og tilhørende centrale aktører. Som udvikler af frem-tidige sociale robotter til demente, bør man undersøge fremtidige krav til teknologien fra slutbrugeren, ved at undersøge og kortlægge de relevante sociale grupper og centrale aktørers forståelsesrammer, da deres krav og holdning til teknologien vil udspringe fra disse forståelsesrammer. På baggrund af etisk analyse af de faktiske konsekvenser af implementeringen af Paro, kan vi konkludere, at der eksisterer moralske og etiske negative og positive konsekvenser. Ud fra dette har vi opstillet mulige etiske og moralske negative og positive konsekvenser ved fremtidig udvikling og implementering af sociale robotter til demente, og derfor samtidig mulige konsekvenser der bør overvejes i denne udvikling.

60
DISKUSSION

61
7. DISKUSSION / PERSPEKTIVERING
Vi har i projektet afgrænset os fra at undersøge visse dele af det sociotekniske system, som robotsælen Paro er en del af. Vi er bevidste om, at der i dette system er flere relevante ak-tører, hvor inddragelse af disse ville have belyst problemstillingen fra andre vinkler – her-under politiske. Politiske aktører har stor indflydelse på beslutninger, hvad angår robotter i velfærdssektoren i kraft af deres fordeling af statens midler. Vi kan se, at Paro ikke har haft samme ’succes’ som velfærdsteknologi i Japan, dette er formentlig på baggrund af, at robotten er relativt dyr at købe og forsikre, og at den ikke betales af staten. Dette ses modsat i Danmark, hvor velfærdssamfundet bidrager til en mulig implementeringen. Vi har endvidere ikke fokuseret på at undersøge tværkulturelle forskelle, som muligvis ville have givet et perspektiv på indvirkning og påvirkning af teknologi i forhold til den kulturelle kontekst, og hvordan denne påvirker aktørernes forståelsesrammer. Vi har end-videre ikke undersøgt hvilken betydning, den geografiske afstand mellem Japan og Dan-mark, har haft i forhold til den indbyrdes påvirkning i mellem relevante sociale grupper, og dette kunne være interessant set i lyset af den globaliserede verden vi lever i i dag. En bred kvantitativ dataindsamling fra et udsnit af danske demenscentre, kunne have givet projekt et større perspektiv af den praktiske brug af Paro, hvilket i højere grad ville have verificeret vores vurdering af plejernes forståelsesramme af teknologien, og kunne have belyst nye problematikker mellem forskellige relevante sociale grupper. Projektets resultater skal forstås som universelle overvejelser til, hvordan designere, ud-viklere og ingeniører bør gøre i fremtidig udvikling af sociale robotter til demente. Disse overvejelser eller principper kan inddrages i idéudviklingsstadier, såvel som i tekniske implementeringer. Eftervirkningerne ved den æstetiske, teknologiske og brugsmæssige udformning af en teknologi, er af stor betydning for slutbrugeres forståelsesramme og sammensætningen af relevante sociale grupper. Overvejelserne kan derfor bruges til ud-viklingen af en ny Paro til børn med ADHD såvel som i udviklingen af robot-assistenter.

62
POSTER-SKITSE
‘Vær Tryg-projekt’KøbenhavnsKommune
1993 2003 2004 2005 2006 2007 2008 2009
“PROJEKT-PARO” starterprofessionalisere brugen af velfærdsrobotter som Paro. Kurser mv. ‘Almindelige’ pleje-hjem og kursister/plejere bruger Paro.
Tests viser at Paro har tera-
på ældre
50-60 velfærdstek. undersøges i ‘Vær Tryg-projekt’ (Første møde med Paro)
Import af 12 Paro’er til test med demente
i Danmark, bl.a. Plejehj. Højdevang.
Robotten testes medældre af National Insti-tute of Advanced Indus-trial Science and Tech-nology (AIST)
Paro udvikles og anvendes afjapanske borgeresom substitut for kæledyr

63
1) PARO SOM KÆLEDYR I JAPAN
2) PARO TIL DEMENTE I DANMARK
‘Projekt Paro’TeknologiskInstitut
3 ) Paro til børn med ADHD?
4) Udviklingshæmmede
?
2010 2011 2012
Ca. 200Paro’eri Danmark
Ca. 1000Paro’eri Japan
Ca. 100Paro’eri Danmark

64
KILDELISTE

65
8. KILDELISTE
Bøger:
Jørgensen, U. red. (2009). I Teknologiens Laboratorium: Ingeniørfagets videnskabsteori (2. udgave). Lyngby: Polyteknisk forlag.
Føllesdal, D., Walløe, L., & Elser, J. (1992). Politikens Introduktion til moderne filosofi og videnskabsteori (). København: Politikkens forlag.
Ryberg, J. (2008). Moralfilosofi. I V. F. Hendricks & S. W. Pedersen (Eds.): Et spadestik dybere: Præsentation af 10 filosofiske discipliner. Automatic Press.
Schraube, E. (2009). Videnskabs- og teknologiforskning I: J. Bjerg (red): Gads Psykolo-gileksikon. Gad.
Papers:Kazuyoshi Wada, Takanori Shibata, Toshimitsu Musha og Shin Kimura (2008). Robot Therapy for Elders effected by Dementia. IEE Engineering in Medicine and Biology Ma-gazine. Paper.
Rapporter: Gaedt, Lone et al. (2009). Vær Tryg-projektet - teknologiske hjælpemidler og hjælpesy-stemer til borgere med demens. København: Sundheds- og Omsorgsforvaltningen, Kø-benhavns Kommune. Hovedrapport.
Jensen, Lilly, Andersen A., Månsson, I., Hurnasti, T., Gudnadottir, T. et al. (2008). Tek-nik og Demens i Norden. Nordiske lande: Hjælpemiddelinstituttet, Socialstyrelsen.
Buss, Dorthe V. (Red) (2008). Håndbog om demens – til pleje og omsorgspersonale på ældreområder, undervisere og de frivillige. Odense: 3. oplag. Servicestyrelsen.
Hjemmesider:Tegersen, A. & Inada, M. (2010, 21. juni). It’s Not a Stuffed Animal, It’s a $6,000 Medi-cal Device. Lokaliseret på Wall Street Journals hjemmeside d. 21. maj 2012 på: http://online.wsj.com/article/SB10001424052748704463504575301051844937276.html

66
National Institute of Advanced Industrial Science and Technology (AIST). (2012a). Paro’s Functions. Lokaliseret d. 21. maj 2012 på: http://paro.jp/?page_id=326 National Institute of Advanced Industrial Science and Technology (AIST). (2012b). Paro’s Functions. Lokaliseret d. 21. maj 2012 på: http://paro.jp/?page_id=319 Teknologisk Institut. (2012a). Lokaliseret d. 21. maj 2012 på: http://www.teknologisk.dk/projekter/25663
Teknologisk Institut. (2012b). Lokaliseret d. 21. maj 2012 på: http://www.teknologisk.dk/ydelser/24256,4 Svane-knudsen, Ditte (2012, 19. marts). Se billeder af verdens fedeste robotter. Lokalise-ret d. 22. maj 2012 på: http://videnskab.dk/teknologi/se-billeder-af-verdens-fedeste-robotter
Andet:National Institute of Advanced Industrial Science and Technology (AIST) (2004, 17. september). Seal-Type Robot ”PARO” to Be Marketed with Best Healing Effect in the World. Lokaliseret d. 25. maj 2012 på: www.parorobots.com,http://www.parorobots.com/pdf/pressreleases/PARO%20to%20be%20marketed%202004-9.pdf. Pressemed-delelse.
Petersen, Thomas Søbirk (2012): Slidepræsentationer til forelæsning 5 i kurset Subjekti-vitet, teknologi og samfund. Roskilde Universitet d. 20. februar 2012
Interviews:Rasmussen, Helle. (2012). Gruppeleder, Højdevang.
Rasmussen, Lisbeth. (2012). SOSU-assistent, Højdevang.
Andreasen, Sunrid (2012). Ergoterapeut, Højdevang.
Fabricius, Bodil (2012). Læringskonsulent, SOSU-center Herning.
Birk, Lone (2012). SOSU-assistent, Plejecenteret Grønnehave.

67
Gaedt, Lone (2012). Seniorkonsulent, Teknologisk Institut.
Optagelserne fra vores interviews samt filmen “Living with Paro” findes på den vedlagte cd-rom.

68