Robotics Portfolio
8
Robotics Portfolio Amir Rajabi, MSc (Mechanical Engineering) 521 Guelph Crescent Saskatoon SK S7H 4R3 (306) 713-3010 [email protected]
-
Upload
amir-rajabi -
Category
Documents
-
view
231 -
download
1
Transcript of Robotics Portfolio

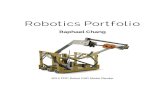
Robotics Portfolio
Amir Rajabi, MSc (Mechanical Engineering)
521 Guelph CrescentSaskatoon SK S7H 4R3
(306) [email protected]

Beta: an Unmanned
Ground Vehicle (UGV)
for Urban Search and
Rescue Missions (USAR)

5 DOFs for locomotion:
- right traction
- left traction
- right triangular wheel rotation
- left triangular wheel rotation
- crawler rotation
Powertrain components:
- chain
- timing belt
- spur gears
- worm gears

6-DOF modular manipulator equipped with a camera, thermal camera, and a CO2 sensor

Gamma: a UGV capable of hybrid
locomotion and manipulation with
4 major DOFs: right traction, left
traction, and rotations of the
second and third links
Rajabi, A.H., Soltanzadeh, A.H., Alizadeh, A., Eftekhari, G., 2011. Prediction of obstacle climbing capability for tracked vehicles. In: 2011 IEEE International
Symposium on Safety, Security, and Rescue Robotics. IEEE, pp. 128–133.

Diamond: an autonomous tracked
robot with 2 DOFs for locomotion
(modular and man-packable)
Rajabi, A.H., Soltanzadeh, A.H., Alizadeh, A., Eftekhari, G., 2011. Prediction of obstacle climbing capability for tracked vehicles. In: 2011 IEEE International
Symposium on Safety, Security, and Rescue Robotics. IEEE, pp. 128–133.

Parametric design of
standard/customized
parts using design tables with
links to SolidWorks
+MIT Calc

Standard shop drawings
STEP files for CNC machines
Assembly guides