Robotics 7

of 33
-
Upload
setsindia3735 -
Category
Documents
-
view
216 -
download
0
Transcript of Robotics 7
-
8/8/2019 Robotics 7
1/33
-
8/8/2019 Robotics 7
2/33
Topics: Introduction toRobotics
CS 491/691(X)Lecture 2
Instructor: Monica Nicolescu
-
8/8/2019 Robotics 7
3/33
CS 491/691(X) - Lecture 2 3
Review
Definitions Robots, robotics
Robot components
Sensors, actuators, controlState, state space
Representation
Spectrum of robot control Reactive, deliberative
-
8/8/2019 Robotics 7
4/33
CS 491/691(X) - Lecture 2 4
Robot Control
Robot control is the means by which the sensingand action of a robot are coordinated
The infinitely many possible robot control programsall fall along a well-defined control spectrum
The spectrum ranges from reacting to deliberating
-
8/8/2019 Robotics 7
5/33
CS 491/691(X) - Lecture 2 5
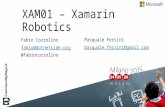
Spectrum of robot control
From Behavior-Based Robotics by R. Arkin, MIT Press, 1998
-
8/8/2019 Robotics 7
6/33
CS 491/691(X) - Lecture 2 6
Robot control approaches
Reactive Control
Dont think, (re)act.
Deliberative (Planner-based) Control
Think hard, act later.
Hybrid Control
Think and act separately & concurrently.
Behavior-Based Control (BBC)
Think the way you act.
-
8/8/2019 Robotics 7
7/33
CS 491/691(X) - Lecture 2 7
Reactive Control :Dont think, react!
Technique for tightly coupling perception and action to providefast responses to changing, unstructured environments
Collection of stimulus-response rules
Limitations
No/minimal state
No memory
No internal representations
of the world
Unable to plan ahead
Unable to learn
Advantages
Very fast and reactive
Powerful method: animalsare largely reactive
-
8/8/2019 Robotics 7
8/33
-
8/8/2019 Robotics 7
9/33
CS 491/691(X) - Lecture 2 9
Hybrid Control :Think and act independentl y & concurrentl y!
Combination of reactive and deliberative control Reactive layer (bottom): deals with immediate reaction
Deliberative layer (top): creates plans
Middle layer: connects the two layers
Usually called three-layer systems
Major challenge: design of the middle layer Reactive and deliberative layers operate on very different
time-scales and representations (signals vs. symbols)
These layers must operate concurrently
Currently one of the two dominant control paradigms
in robotics
-
8/8/2019 Robotics 7
10/33
CS 491/691(X) - Lecture 2 10
Behavior- Based Control :Think the wa y you act!
An alternative to hybrid control, inspired from biology
Has the same capabilities as hybrid control:
Act reactively and deliberatively
Also built from layers
However, there is no intermediate layer
Components have a u niform representation and time-scale Behaviors : concurrent processes that take inputs from
sensors and other behaviors and send outputs to a robotsactuators or other behaviors to achieve some goals
-
8/8/2019 Robotics 7
11/33
CS 491/691(X) - Lecture 2 11
Behavior- Based Control :Think the wa y you act!
Thinking is performed through a network of behaviors
Utilize distributed representations
Respond in real-time are reactive
Are not stateless not merely reactive
Allow for a variety of behavior coordinationmechanisms
-
8/8/2019 Robotics 7
12/33
CS 491/691(X) - Lecture 2 12
F undamental Differences of Control
Time-scale: How fast do things happen? how quickly the robot has to respond to the environment,
compared to how quickly it can sense and think
Modularity: What are the components of the control s ystem? Refers to the way the control system is broken up into
modules and how they interact with each other
Representation: What does the robot keep in its brain?
The form in which information is stored or encoded in therobot
-
8/8/2019 Robotics 7
13/33
CS 491/691(X) - Lecture 2 13
A Brief Histor y of RoboticsRobotics grew out of the fields of control theory , cybernetics
and AI
Robotics, in the modern sense, can be considered to have
started around the time of cybernetics (1940s)Early AI had a strong impact on how it evolved (1950s-1970s),
emphasizing reasoning and abstraction, removal from direct
situatedness and embodiment
In the 1980s a new set of methods was introduced and robots
were put back into the physical world
-
8/8/2019 Robotics 7
14/33
CS 491/691(X) - Lecture 2 14
Control Theor y
The mathematical study of the properties of automated control systems Helps understand the fundamental concepts governing all
mechanical systems (steam engines, aeroplanes, etc.)
Feedback: measure state and take an action based on it
Thought to have originated with the ancient Greeks Time measuring devices (water clocks), water systems
Forgotten and rediscovered in Renaissance Europe Heat-regulated furnaces (Drebbel, Reaumur, Bonnemain)
Windmills
James Watts steam engine (the governor)
-
8/8/2019 Robotics 7
15/33
CS 491/691(X) - Lecture 2 15
F eedback Control
Definition: technique for bringing and maintaining asystem in a goal state , as the external conditionsvary
Idea: continuously feeding back the current stateand comparing it to the desired state, then adjustingthe current state to minimize the difference ( negativefeedback ). The system is said to be self-regulating
E.g.: thermostats if too hot, turn down, if too cold, turn up
-
8/8/2019 Robotics 7
16/33
-
8/8/2019 Robotics 7
17/33
-
8/8/2019 Robotics 7
18/33
-
8/8/2019 Robotics 7
19/33
CS 491/691(X) - Lecture 2 19
Braitenberg Vehicles
Valentino Braitenberg (1980)Thought experiments Use direct coupling between sensors and motors
Simple robots (vehicles) produce complex behaviors thatappear very animal, life-like
Excitatory connection The stronger the sensory input, the stronger the motor output
Light sensor p wheel: photophilic robot (loves the light)Inhibitory connection The stronger the sensory input, the weaker the motor output
Light sensor p wheel: photophobic robot (afraid of the light)
-
8/8/2019 Robotics 7
20/33
CS 491/691(X) - Lecture 2 20
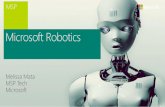
Ex ample VehiclesWide range of vehicles can be designed, by changing theconnections and their strength
Vehicle 1:
One motor, one sensor
Vehicle 2:
Two motors, two sensors
Excitatory connections
Vehicle 3:
Two motors, two sensors
Inhibitory connections
Being ALIVE
FEAR and AGGRESSION
LOVE
Vehicle 1
Vehicle 2
-
8/8/2019 Robotics 7
21/33
CS 491/691(X) - Lecture 2 21
A rtificial Intelligence
Officially born in 1956 at Dartmouth University Marvin Minsky, John McCarthy, Herbert Simon
Intelligence in machines
Internal models of the world Search through possible solutions
Plan to solve problems
Symbolic representation of information
Hierarchical system organization
Sequential program execution
-
8/8/2019 Robotics 7
22/33
CS 491/691(X) - Lecture 2 22
A I and Robotics
AI influence to robotics: Knowledge and knowledge representation are central to
intelligence
Perception and action are more central to robotics
New solutions developed: behavior-based systems Planning is just a way of avoiding figuring out what to do
next (Rodney Brooks, 1987)
Distributed AI (DAI) Society of Mind (Marvin Minsky, 1986): simple, multiple
agents can generate highly complex intelligence
First robots were mostly influenced by AI (deliberative)
-
8/8/2019 Robotics 7
23/33
CS 491/691(X) - Lecture 2 23
Shake y
At Stanford ResearchInstitute (late 1960s)
A deliberative system
Visual navigation in avery special world
STRIPS planner
Vision and contactsensors
-
8/8/2019 Robotics 7
24/33
CS 491/691(X) - Lecture 2 24
Earl y A I Robots: HILARE
Late 1970sAt LAAS in Toulouse
Video, ultrasound, laser
rangefinder Was in use for almost 2decades
One of the earliesthybrid architectures
Multi-level spatialrepresentations
-
8/8/2019 Robotics 7
25/33
CS 491/691(X) - Lecture 2 25
Earl y Robots: CA RT/Rover
Hans Moravecs early robotsStanford Cart (1977) followedby CMU rover (1983)
Sonar and vision
-
8/8/2019 Robotics 7
26/33
CS 491/691(X) - Lecture 2 26
Lessons Learned
Move faster, more robustlyThink in such a way as to allow this action
New types of robot control:
Reactive, hybrid, behavior-basedControl theory Continues to thrive in numerous applications
Cybernetics Biologically inspired robot control
AI Non-physical, disembodied thinking
-
8/8/2019 Robotics 7
27/33
CS 491/691(X) - Lecture 2 27
Challenges
Perception
Limited, noisy sensors
Actuation
Limited capabilities of robot effectors
Thinking
Time consuming in large state spaces
Environments
Dynamic, impose fast reaction times
-
8/8/2019 Robotics 7
28/33
CS 491/691(X) - Lecture 2 28
Ke y Issues of Behavior- BasedControl
Situatedness Robot is entirely situated in the real world
Embodiment
Robot has a physical bodyEmergence: Intelligence from the interaction with the environment
Grounding in reality Correlation of symbols with the reality
Scalability Reaching high-level of intelligence
-
8/8/2019 Robotics 7
29/33
CS 491/691(X) - Lecture 2 29
E ffectors & A ctuators
Effector Any device robot that has an impact on the environment
Effectors must match a robots task
Controllers command the effectors to achieve the desired task
Actuator A robot mechanism that enables the effector to execute an action
Robot effectors are very different than biological ones
Robots: wheels, tracks, grippers
Robot actuators:
Electric motors, hydraulic, pneumatic cylinders, temperature-sensitive materials
-
8/8/2019 Robotics 7
30/33
CS 491/691(X) - Lecture 2 30
Passive A ctuation
Use potential energy andinteraction with the environment
E.g.: gliding (flying squirrels)
Robotics examples:
Tad McGeers passive walker Actuated by gravity
-
8/8/2019 Robotics 7
31/33
CS 491/691(X) - Lecture 2 31
T ypes of A ctuators
Electric motorsHydraulics
Pneumatics
Photo-reactive materialsChemically reactive materials
Thermally reactive materials
Piezoelectric materials
-
8/8/2019 Robotics 7
32/33
CS 491/691(X) - Lecture 2 32
DC Motors
DC (direct current) motors Convert electrical energy into mechanical energy
Small, cheap, reasonably efficient, easy to use
How do they work?
Electrical current through loops of wires mounted on a rotatingshaft
When current is flowing, loops of wire generate a magnetic field,which reacts against the magnetic fields of permanent magnets
positioned around the wire loops These magnetic fields push against one another and the
armature turns
-
8/8/2019 Robotics 7
33/33
CS 491/691(X) - Lecture 2 33
Readings
F. Martin: Section 4.1
M. Matari : Chapters 2, 4