5.1 控制器的发展与分类 5.2 控制器基本控制规律 5.3 模拟式控制器 5.4 数字式控制器 5.5 执行器 5.6 调节机构 5.7 执行机构

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
RM-X52-TNM 使用手册 1 概述
OpenManipulator-X(RM-X52-TNM)是一款支持 ROS 的完全开放的机器人平台由
OpenSoftwareOpenHardware 和 OpenCR(嵌入式板)组成
软件开源
OpenManipulator-X(RM-X52-TNM)是基于 ROS 和 OpenSource 的机器人平台这款机械
臂是与 Turtlebot3 具有完全的硬件兼容性用户还可以通过将其与 moveit 链接来更轻松地控
制即使你没有真正的机器人你也可以在观景台模拟器中控制机器人
硬件开源
OpenMANIPULATOR-X(RM-X52-TNM) 是一款可以硬件开源的机器人平台 大多数组件
都以 STL 文件的形式上传这样用户就可以轻松地进行 3D 打印 用户还可以修改链接的
长度或机器人的设计OpenMANIPULATOR-X (RM-X52-TNM)是由用于 TB3 机器人的
X 系列舵机组成
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
OpenCR (嵌入式控制板)
RM-X52-TNM 也可以使用 OpenCR(用于 ROS 的开源控制模块)进行控制 这个控制板可
以用于 TB3 机器人OpenCR 的计算能力和实时可控性可以支持正向和反向运动学以及配
置文件控制实例
舵机实例
OpenManipulator-X(RM-X52-TNM)是由 X 舵机系列和 3D 打印配件组成舵
机采用模块化形式采用菊花链法它允许用户添加或删除关节以满足自身的
使用需求利用这一特点用户可以构建 7 种不同类型的 OpenManipulator-X 系
列ChainScaraLinkPlanarDeltaStewart 和 Linear
2 说明
硬件说明
项目 单位 OpenMANIPULATOR-X 机械臂
执行机构 XM430-W350-T 舵机
输入电压 V 12
自由度 - 5 (4 个自由度+ 夹持器 1 个自由度)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 单位 OpenMANIPULATOR-X 机械臂
有效载荷 g 500
重复定位精度 mm lt 02
速度(关节) RPM 46
重量 kg (lb) 070 (154)
可达范围 mm (in) 380 (149)
夹持器可达范围 mm (in) 20~75 (079~295)
通讯模式 - TTL Level Multidrop BUS
软件 - ROS Dynamixel SDK Arduino Processing
主控制器 - PC OpenCR
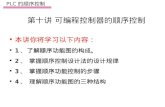
尺寸图
3入门使用手册 本章针对的是 OpenManipulator-X 的新手本手册包含大量内容但本章解释了如何区分信
息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
关于 OpenMANIPULATOR-X 机械臂
OpenManipulator-X 是支持 ROS的一个完全开放的机器人平台由开源软件开源硬
件以及 OpenCR(嵌入式控制板)组成首先 从概述和说明章节获得信息以全面了解
OpenManipulator-X
OpenMANIPULATOR-X 机械臂设置
当您从上述步骤对 OpenManipulator-X 有足够的了解时建议按以下顺序进行
硬件设置
1 检查配件清单 OpenMANIPULATOR-X 仅包含配置OpenManipulator-X主体所需的零
件为了控制和操作 OpenMANIPULATOR-X请选择购买有些必要的配件请查看配
件列表准备好所需的所有配件12V 5A 的电源是用于为 OpenMANIPULATOR-X 的
舵机提供 12V 电源的必备配件底板 02 用于将 OpenManipulator-X 固定到工作区间
您需要准备的控制器或通信板取决于您的开发环境如果您想在嵌入式系统上开发请
准备 OpenCR 和 PC要使用 ROS请准备好您的电脑和 u2d2+u2d2 电源供电板或
OpenCR综上所述需准备的配件如下表所示
2 装配 请按照装配手册的说明装配 OpenManipulator-X
配件清单
ROS 开发环境 嵌入式环境
机械臂 OpenMANIPULATOR-X OpenMANIPULATOR-X
板 Base Plate-02 Base Plate-02
电源 SMPS 12V5A SMPS 12V5A
控制板 OpenCR 或 U2D2+U2D2 电源供电板 OpenCR
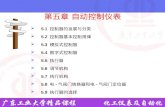
连接电路板
OpenMANIPULATOR-X 要安装软件并运行您需要连上您的电脑及电路板您可以使
用 OpenCR 或者 U2D2+ U2D2 电源供电板作为电路板下面是一个简单的连接图有关详
细的连接方法请参阅[ROS]设置或[OpenCR]设置页
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
软件设置
OpenMANIPULATOR-X 实现了 ROS 开发环境和嵌入式系统(OpenCR)选择要运行
OpenMANIPULATOR-X 的开发环境并为该环境配置软件
ROS 环境
在 ROS 开发环境中您可以使用 ROS 提供的各种包以及我们的 ROS 包运
行 OpenMANIPULATOR-X在这种情况下运行 OpenMANIPULATOR-X 的所
有过程都是在 PC 机上完成的而电路板仅用于将 PC 机发出的数字信号转换成
舵机中使用的通信信号如果要在 ROS 环境中运行 OpenMANIPULATOR-X
请根据[ROS]设置章节在 PC 上安装 LinuxROS 和 ROS 包
嵌入式系统
如果您在嵌入式系统(OpenCR)中使用 OpenMANIPULATOR-X您可以轻松地将您
的算法应用到一个易于使用的系统(如 Arduino IDE)上运行 OpenMANIPULATOR-X在
这种情况下运行 OpenMANIPULATOR-X 的主要过程是在嵌入式系统内完成的并且可以
使用 PC 的 GUI 程序操纵杆控制器或简单的传感器向嵌入式系统发送命令如果要在嵌入
式系统上运行 OpenMANIPULATOR-X请在 PC 上安装软件并按照[OpenCR]设置章节设
置 OpenCR
基本操作
ROS 环境的基本运行
完成上述步骤后通过提供的控制器包运行 OpenMANIPULATOR-X您可以通过 ROS
消息命令 OpenMANIPULATOR-X 移动特定位置请参阅下一页以运行控制器包并测试它是
否工作正常
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
控制器包
成功运行控制器包之后可以使用我们提供的包将 ROS 消息发布到控制器包从而运行
OpenMANIPULATOR-X下面的基本操作示例作为用于 ROS 发布的消息数据包提供
GUI 程序
远程操作
OpenMANIPULATOR-X 也可以使用 MoveIt 操作您可以运行使用 MoveIt 的控制器包
通过更改控制器包的启动文件中的变量请参考以下章节并尝试使用 MoveIt 进行各种动
作
MoveIt
嵌入式系统的基本操作
OpenMANIPULATOR-X 不仅可以使用 ROS 操作还可以使用简单的嵌入式系
统(OpenCR)在嵌入式系统(OpenCR)中在 OpenCR 内部操作运行
OpenManipulator-X 的控制过程请参阅以下页面将控制器上载到 OpenCR
上传控制器
有多种方法可以向 OpenCR 中运行的控制器发送命令我们提供处理源代码作为
通过 USB 端口发送命令和接收操纵器状态的示例我们还将控制器配置为使用
RC100 控制器操作操纵器尝试使用 OpenCR 控制 OpenMANIPULATOR-X请
参阅下一章节
GUI 程序(数据处理)
RC100 远程遥控
挑战应用程序
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
您想要将 OpenMANIPULATOR-X 应用于实际工作吗尝试将新的 ROS 包应用于
OpenMANIPULATOR-X可以应用于各种任务我们提供了使用 Astra ProRealsence D435
和 Raspberry PI Camera V2 进行 AR 标记识别的示例请参阅下面的示例以挑战基于摄像
头的操作应用程序
摄像头应用程序
您想要在人类无法访问的区域运行OpenManipulator-X 吗您想要简单直观的运动计划吗
主从应用程序就是答案我们提供了一个例子通过链接两个打开的机械手 X 和操作主机
械手的手动指导教学可以很容易地创建运动通过以下链接尝试主从应用程序
主从配置
操纵器的设计
移动操纵
OpenMANIPULATOR-X 与 Turtlebot3 华夫具有完整的硬件组合通过组装
Turtlebot3 华夫和 OpenMANIPULATOR-X 挑战您的移动操作
修模
我们提出了一种替换和操作机械手的工具(夹持器)的方法以利用 OpenMANIPULATOR-X
实现更广泛的应用如下面的示例所示使用笔架或真空抓取器尝试新的应用程序并创建
自己的工具来挑战更多的应用程序
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
OpenMANIPULATOR Friends
修改 OpenMANIPULATOR-X 的硬件(DOF结构)和软件(运动学轨迹)并操作
您自己的 OpenMANIPULATOR我们提供各种 OpenMANIPULATOR-X 相似系列
产品作为硬件转换的示例试着用不同的结构控制机械手并针对不同的结构尝试运动学
求解算法
4装配
配件清单
必备的配件
配件名称 数量
底盘零件 链接框架(长) 1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
连接框架(短) 1
导轨支架(左) 1
导轨支架(右) 1
夹手 2
连接杆 2
法兰衬套 4
曲柄臂 1
轨道块 2
FR12-S101-K 结构件 1
FR12-S102-K 机构及 2
FR12-H101-K 结构件 2
FR12-H104-K 结构件 1
执行机构 舵机 XM430-W350-T 5
数据线 X3P-100 1
X3P-180 2
X3P-240 2
工具 螺丝刀 1
扳手-15 1
扳手-20 1
扳手-25 1
其他 X-SP 24
螺母-M25 16
螺母-M3 4
FHS-M25x14 12
WB-M2x3 38
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
WB-M2x4 4
WB-M25x4 4
WB-M25x6 8
WB-M25x8 16
WB-M25x12 4
WB-M25x17 4
WB-M25x20 4
WB-M3x10 4
DC12-IDLER 3
DC12-IDLER-帽 3
DC12-P-轴承 3
橡胶垫 2
可选配件
配件名称 数量
电源 SMPS 12V5A 1
电路板 OpenCR 1
U2D2 1
U2D2 电源供电板 1
板 底板-02 1
3D 打印配件
我们提供 OpenMANIPULATOR-X 配件的 3D CAD 文件用户可以轻松地修改和打印
3D CAD 文件()形状 Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
装配手册
OpenMANIPULATOR-X 交付是未组装的零件请按照装配说明进行组装
5[ROS] 设置 注意
该测试在安装在 Ubuntu 1604 中的 ROS Kinetic Kame 上完成
在执行这些说明之前请确保安装了 ROS 决定项-安装 ROS 数据包
警告如果您希望在 OpenCR(嵌入式板)上控制 OpenMANIPULATOR-X 而不是使用 ROS请按照
OpenCR 设置中的说明进行设置
电脑上安装 Ubuntu
把 Ubuntu 1604 下载并安装到您的电脑上教程指南将帮助您安装 Ubuntu 桌面
下载 Ubuntu
教程指南- 安装 Ubuntu 桌面
电脑上安装 ROS
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
下面的脚本将允许您简化 ROS 安装过程在终端窗口中运行以下命令终端应用程序可以
通过屏幕左上角的 Ubuntu 搜索图标找到打开终端的快捷键是 Ctrl+Alt+t安装完 ROS 后
请重新启动电脑
注意为了检查安装了哪些软件包请检查此链接 install_ros_kineticsh
如果您选择手动安装请按照下面的链接操作
Manual installation of ROS Kinetic
安装 ROS 数据包
安装 OpenMANIPULATOR-X 的相关软件包在终端窗口中运行以下命令
注意终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
通讯转换器
U2D2
连接
将微型 USB(连接到 PC)舵机(OpenMANIPULATOR-X))和 12V 电源连接到 U2D2 和
U2D2 电源供电板如下所示
注意有关 U2D2 和 U2D2 电源供电板的详细连接请参阅 U2D2 E-手册和 U2D2 电源集
线器板 E-手册
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
USB 延迟计时器设置
在 Linux(Ubuntu 平台)环境中USB 延迟时间默认设置为 16ms按照以下步骤将舵机和
通过 USB 连接的 PC 之间的通信延迟时间设置为最小值(1 毫秒)
打开终端窗口并运行 roscore
在运行 Roscore 的情况下打开一个新的终端窗口并输入以下命令来设置 USB 延迟时间
提示输入的命令将 USB 延迟计时器设置为 1 毫秒如果您想查看设置请在终端中运行
以下命令cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
本节介绍如何将 OpenCR 设置为 PC 的 ROS 包与 OpenMANIPULATOR-X的舵机之间的
通信板
如果要在没有 ROS 的嵌入式系统(OpenCR)上操作 OpenMANIPULATOR-X 请参阅
OpenCR 设置
连接
将微型-USB (连接到 PC)舵机(OpenMANIPULATOR-X)和 12V 电源连接到 OpenCR
如下所示
注请参阅 OpenCR 的详细说明
上传源代码
请参阅以下页面以安装 Arduino IDE 并在 Arduino IDE 环境中启用 OpenCR 控制板
使用 OpenCR 的 Arduino IDE
完成上述所有设置后打开 Arduino IDE 并打开 usb to dxl 示例源代码如下所示按照
Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl 的顺序设置
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
OpenCR (嵌入式控制板)
RM-X52-TNM 也可以使用 OpenCR(用于 ROS 的开源控制模块)进行控制 这个控制板可
以用于 TB3 机器人OpenCR 的计算能力和实时可控性可以支持正向和反向运动学以及配
置文件控制实例
舵机实例
OpenManipulator-X(RM-X52-TNM)是由 X 舵机系列和 3D 打印配件组成舵
机采用模块化形式采用菊花链法它允许用户添加或删除关节以满足自身的
使用需求利用这一特点用户可以构建 7 种不同类型的 OpenManipulator-X 系
列ChainScaraLinkPlanarDeltaStewart 和 Linear
2 说明
硬件说明
项目 单位 OpenMANIPULATOR-X 机械臂
执行机构 XM430-W350-T 舵机
输入电压 V 12
自由度 - 5 (4 个自由度+ 夹持器 1 个自由度)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 单位 OpenMANIPULATOR-X 机械臂
有效载荷 g 500
重复定位精度 mm lt 02
速度(关节) RPM 46
重量 kg (lb) 070 (154)
可达范围 mm (in) 380 (149)
夹持器可达范围 mm (in) 20~75 (079~295)
通讯模式 - TTL Level Multidrop BUS
软件 - ROS Dynamixel SDK Arduino Processing
主控制器 - PC OpenCR
尺寸图
3入门使用手册 本章针对的是 OpenManipulator-X 的新手本手册包含大量内容但本章解释了如何区分信
息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
关于 OpenMANIPULATOR-X 机械臂
OpenManipulator-X 是支持 ROS的一个完全开放的机器人平台由开源软件开源硬
件以及 OpenCR(嵌入式控制板)组成首先 从概述和说明章节获得信息以全面了解
OpenManipulator-X
OpenMANIPULATOR-X 机械臂设置
当您从上述步骤对 OpenManipulator-X 有足够的了解时建议按以下顺序进行
硬件设置
1 检查配件清单 OpenMANIPULATOR-X 仅包含配置OpenManipulator-X主体所需的零
件为了控制和操作 OpenMANIPULATOR-X请选择购买有些必要的配件请查看配
件列表准备好所需的所有配件12V 5A 的电源是用于为 OpenMANIPULATOR-X 的
舵机提供 12V 电源的必备配件底板 02 用于将 OpenManipulator-X 固定到工作区间
您需要准备的控制器或通信板取决于您的开发环境如果您想在嵌入式系统上开发请
准备 OpenCR 和 PC要使用 ROS请准备好您的电脑和 u2d2+u2d2 电源供电板或
OpenCR综上所述需准备的配件如下表所示
2 装配 请按照装配手册的说明装配 OpenManipulator-X
配件清单
ROS 开发环境 嵌入式环境
机械臂 OpenMANIPULATOR-X OpenMANIPULATOR-X
板 Base Plate-02 Base Plate-02
电源 SMPS 12V5A SMPS 12V5A
控制板 OpenCR 或 U2D2+U2D2 电源供电板 OpenCR
连接电路板
OpenMANIPULATOR-X 要安装软件并运行您需要连上您的电脑及电路板您可以使
用 OpenCR 或者 U2D2+ U2D2 电源供电板作为电路板下面是一个简单的连接图有关详
细的连接方法请参阅[ROS]设置或[OpenCR]设置页
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
软件设置
OpenMANIPULATOR-X 实现了 ROS 开发环境和嵌入式系统(OpenCR)选择要运行
OpenMANIPULATOR-X 的开发环境并为该环境配置软件
ROS 环境
在 ROS 开发环境中您可以使用 ROS 提供的各种包以及我们的 ROS 包运
行 OpenMANIPULATOR-X在这种情况下运行 OpenMANIPULATOR-X 的所
有过程都是在 PC 机上完成的而电路板仅用于将 PC 机发出的数字信号转换成
舵机中使用的通信信号如果要在 ROS 环境中运行 OpenMANIPULATOR-X
请根据[ROS]设置章节在 PC 上安装 LinuxROS 和 ROS 包
嵌入式系统
如果您在嵌入式系统(OpenCR)中使用 OpenMANIPULATOR-X您可以轻松地将您
的算法应用到一个易于使用的系统(如 Arduino IDE)上运行 OpenMANIPULATOR-X在
这种情况下运行 OpenMANIPULATOR-X 的主要过程是在嵌入式系统内完成的并且可以
使用 PC 的 GUI 程序操纵杆控制器或简单的传感器向嵌入式系统发送命令如果要在嵌入
式系统上运行 OpenMANIPULATOR-X请在 PC 上安装软件并按照[OpenCR]设置章节设
置 OpenCR
基本操作
ROS 环境的基本运行
完成上述步骤后通过提供的控制器包运行 OpenMANIPULATOR-X您可以通过 ROS
消息命令 OpenMANIPULATOR-X 移动特定位置请参阅下一页以运行控制器包并测试它是
否工作正常
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
控制器包
成功运行控制器包之后可以使用我们提供的包将 ROS 消息发布到控制器包从而运行
OpenMANIPULATOR-X下面的基本操作示例作为用于 ROS 发布的消息数据包提供
GUI 程序
远程操作
OpenMANIPULATOR-X 也可以使用 MoveIt 操作您可以运行使用 MoveIt 的控制器包
通过更改控制器包的启动文件中的变量请参考以下章节并尝试使用 MoveIt 进行各种动
作
MoveIt
嵌入式系统的基本操作
OpenMANIPULATOR-X 不仅可以使用 ROS 操作还可以使用简单的嵌入式系
统(OpenCR)在嵌入式系统(OpenCR)中在 OpenCR 内部操作运行
OpenManipulator-X 的控制过程请参阅以下页面将控制器上载到 OpenCR
上传控制器
有多种方法可以向 OpenCR 中运行的控制器发送命令我们提供处理源代码作为
通过 USB 端口发送命令和接收操纵器状态的示例我们还将控制器配置为使用
RC100 控制器操作操纵器尝试使用 OpenCR 控制 OpenMANIPULATOR-X请
参阅下一章节
GUI 程序(数据处理)
RC100 远程遥控
挑战应用程序
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
您想要将 OpenMANIPULATOR-X 应用于实际工作吗尝试将新的 ROS 包应用于
OpenMANIPULATOR-X可以应用于各种任务我们提供了使用 Astra ProRealsence D435
和 Raspberry PI Camera V2 进行 AR 标记识别的示例请参阅下面的示例以挑战基于摄像
头的操作应用程序
摄像头应用程序
您想要在人类无法访问的区域运行OpenManipulator-X 吗您想要简单直观的运动计划吗
主从应用程序就是答案我们提供了一个例子通过链接两个打开的机械手 X 和操作主机
械手的手动指导教学可以很容易地创建运动通过以下链接尝试主从应用程序
主从配置
操纵器的设计
移动操纵
OpenMANIPULATOR-X 与 Turtlebot3 华夫具有完整的硬件组合通过组装
Turtlebot3 华夫和 OpenMANIPULATOR-X 挑战您的移动操作
修模
我们提出了一种替换和操作机械手的工具(夹持器)的方法以利用 OpenMANIPULATOR-X
实现更广泛的应用如下面的示例所示使用笔架或真空抓取器尝试新的应用程序并创建
自己的工具来挑战更多的应用程序
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
OpenMANIPULATOR Friends
修改 OpenMANIPULATOR-X 的硬件(DOF结构)和软件(运动学轨迹)并操作
您自己的 OpenMANIPULATOR我们提供各种 OpenMANIPULATOR-X 相似系列
产品作为硬件转换的示例试着用不同的结构控制机械手并针对不同的结构尝试运动学
求解算法
4装配
配件清单
必备的配件
配件名称 数量
底盘零件 链接框架(长) 1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
连接框架(短) 1
导轨支架(左) 1
导轨支架(右) 1
夹手 2
连接杆 2
法兰衬套 4
曲柄臂 1
轨道块 2
FR12-S101-K 结构件 1
FR12-S102-K 机构及 2
FR12-H101-K 结构件 2
FR12-H104-K 结构件 1
执行机构 舵机 XM430-W350-T 5
数据线 X3P-100 1
X3P-180 2
X3P-240 2
工具 螺丝刀 1
扳手-15 1
扳手-20 1
扳手-25 1
其他 X-SP 24
螺母-M25 16
螺母-M3 4
FHS-M25x14 12
WB-M2x3 38
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
WB-M2x4 4
WB-M25x4 4
WB-M25x6 8
WB-M25x8 16
WB-M25x12 4
WB-M25x17 4
WB-M25x20 4
WB-M3x10 4
DC12-IDLER 3
DC12-IDLER-帽 3
DC12-P-轴承 3
橡胶垫 2
可选配件
配件名称 数量
电源 SMPS 12V5A 1
电路板 OpenCR 1
U2D2 1
U2D2 电源供电板 1
板 底板-02 1
3D 打印配件
我们提供 OpenMANIPULATOR-X 配件的 3D CAD 文件用户可以轻松地修改和打印
3D CAD 文件()形状 Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
装配手册
OpenMANIPULATOR-X 交付是未组装的零件请按照装配说明进行组装
5[ROS] 设置 注意
该测试在安装在 Ubuntu 1604 中的 ROS Kinetic Kame 上完成
在执行这些说明之前请确保安装了 ROS 决定项-安装 ROS 数据包
警告如果您希望在 OpenCR(嵌入式板)上控制 OpenMANIPULATOR-X 而不是使用 ROS请按照
OpenCR 设置中的说明进行设置
电脑上安装 Ubuntu
把 Ubuntu 1604 下载并安装到您的电脑上教程指南将帮助您安装 Ubuntu 桌面
下载 Ubuntu
教程指南- 安装 Ubuntu 桌面
电脑上安装 ROS
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
下面的脚本将允许您简化 ROS 安装过程在终端窗口中运行以下命令终端应用程序可以
通过屏幕左上角的 Ubuntu 搜索图标找到打开终端的快捷键是 Ctrl+Alt+t安装完 ROS 后
请重新启动电脑
注意为了检查安装了哪些软件包请检查此链接 install_ros_kineticsh
如果您选择手动安装请按照下面的链接操作
Manual installation of ROS Kinetic
安装 ROS 数据包
安装 OpenMANIPULATOR-X 的相关软件包在终端窗口中运行以下命令
注意终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
通讯转换器
U2D2
连接
将微型 USB(连接到 PC)舵机(OpenMANIPULATOR-X))和 12V 电源连接到 U2D2 和
U2D2 电源供电板如下所示
注意有关 U2D2 和 U2D2 电源供电板的详细连接请参阅 U2D2 E-手册和 U2D2 电源集
线器板 E-手册
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
USB 延迟计时器设置
在 Linux(Ubuntu 平台)环境中USB 延迟时间默认设置为 16ms按照以下步骤将舵机和
通过 USB 连接的 PC 之间的通信延迟时间设置为最小值(1 毫秒)
打开终端窗口并运行 roscore
在运行 Roscore 的情况下打开一个新的终端窗口并输入以下命令来设置 USB 延迟时间
提示输入的命令将 USB 延迟计时器设置为 1 毫秒如果您想查看设置请在终端中运行
以下命令cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
本节介绍如何将 OpenCR 设置为 PC 的 ROS 包与 OpenMANIPULATOR-X的舵机之间的
通信板
如果要在没有 ROS 的嵌入式系统(OpenCR)上操作 OpenMANIPULATOR-X 请参阅
OpenCR 设置
连接
将微型-USB (连接到 PC)舵机(OpenMANIPULATOR-X)和 12V 电源连接到 OpenCR
如下所示
注请参阅 OpenCR 的详细说明
上传源代码
请参阅以下页面以安装 Arduino IDE 并在 Arduino IDE 环境中启用 OpenCR 控制板
使用 OpenCR 的 Arduino IDE
完成上述所有设置后打开 Arduino IDE 并打开 usb to dxl 示例源代码如下所示按照
Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl 的顺序设置
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 单位 OpenMANIPULATOR-X 机械臂
有效载荷 g 500
重复定位精度 mm lt 02
速度(关节) RPM 46
重量 kg (lb) 070 (154)
可达范围 mm (in) 380 (149)
夹持器可达范围 mm (in) 20~75 (079~295)
通讯模式 - TTL Level Multidrop BUS
软件 - ROS Dynamixel SDK Arduino Processing
主控制器 - PC OpenCR
尺寸图
3入门使用手册 本章针对的是 OpenManipulator-X 的新手本手册包含大量内容但本章解释了如何区分信
息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
关于 OpenMANIPULATOR-X 机械臂
OpenManipulator-X 是支持 ROS的一个完全开放的机器人平台由开源软件开源硬
件以及 OpenCR(嵌入式控制板)组成首先 从概述和说明章节获得信息以全面了解
OpenManipulator-X
OpenMANIPULATOR-X 机械臂设置
当您从上述步骤对 OpenManipulator-X 有足够的了解时建议按以下顺序进行
硬件设置
1 检查配件清单 OpenMANIPULATOR-X 仅包含配置OpenManipulator-X主体所需的零
件为了控制和操作 OpenMANIPULATOR-X请选择购买有些必要的配件请查看配
件列表准备好所需的所有配件12V 5A 的电源是用于为 OpenMANIPULATOR-X 的
舵机提供 12V 电源的必备配件底板 02 用于将 OpenManipulator-X 固定到工作区间
您需要准备的控制器或通信板取决于您的开发环境如果您想在嵌入式系统上开发请
准备 OpenCR 和 PC要使用 ROS请准备好您的电脑和 u2d2+u2d2 电源供电板或
OpenCR综上所述需准备的配件如下表所示
2 装配 请按照装配手册的说明装配 OpenManipulator-X
配件清单
ROS 开发环境 嵌入式环境
机械臂 OpenMANIPULATOR-X OpenMANIPULATOR-X
板 Base Plate-02 Base Plate-02
电源 SMPS 12V5A SMPS 12V5A
控制板 OpenCR 或 U2D2+U2D2 电源供电板 OpenCR
连接电路板
OpenMANIPULATOR-X 要安装软件并运行您需要连上您的电脑及电路板您可以使
用 OpenCR 或者 U2D2+ U2D2 电源供电板作为电路板下面是一个简单的连接图有关详
细的连接方法请参阅[ROS]设置或[OpenCR]设置页
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
软件设置
OpenMANIPULATOR-X 实现了 ROS 开发环境和嵌入式系统(OpenCR)选择要运行
OpenMANIPULATOR-X 的开发环境并为该环境配置软件
ROS 环境
在 ROS 开发环境中您可以使用 ROS 提供的各种包以及我们的 ROS 包运
行 OpenMANIPULATOR-X在这种情况下运行 OpenMANIPULATOR-X 的所
有过程都是在 PC 机上完成的而电路板仅用于将 PC 机发出的数字信号转换成
舵机中使用的通信信号如果要在 ROS 环境中运行 OpenMANIPULATOR-X
请根据[ROS]设置章节在 PC 上安装 LinuxROS 和 ROS 包
嵌入式系统
如果您在嵌入式系统(OpenCR)中使用 OpenMANIPULATOR-X您可以轻松地将您
的算法应用到一个易于使用的系统(如 Arduino IDE)上运行 OpenMANIPULATOR-X在
这种情况下运行 OpenMANIPULATOR-X 的主要过程是在嵌入式系统内完成的并且可以
使用 PC 的 GUI 程序操纵杆控制器或简单的传感器向嵌入式系统发送命令如果要在嵌入
式系统上运行 OpenMANIPULATOR-X请在 PC 上安装软件并按照[OpenCR]设置章节设
置 OpenCR
基本操作
ROS 环境的基本运行
完成上述步骤后通过提供的控制器包运行 OpenMANIPULATOR-X您可以通过 ROS
消息命令 OpenMANIPULATOR-X 移动特定位置请参阅下一页以运行控制器包并测试它是
否工作正常
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
控制器包
成功运行控制器包之后可以使用我们提供的包将 ROS 消息发布到控制器包从而运行
OpenMANIPULATOR-X下面的基本操作示例作为用于 ROS 发布的消息数据包提供
GUI 程序
远程操作
OpenMANIPULATOR-X 也可以使用 MoveIt 操作您可以运行使用 MoveIt 的控制器包
通过更改控制器包的启动文件中的变量请参考以下章节并尝试使用 MoveIt 进行各种动
作
MoveIt
嵌入式系统的基本操作
OpenMANIPULATOR-X 不仅可以使用 ROS 操作还可以使用简单的嵌入式系
统(OpenCR)在嵌入式系统(OpenCR)中在 OpenCR 内部操作运行
OpenManipulator-X 的控制过程请参阅以下页面将控制器上载到 OpenCR
上传控制器
有多种方法可以向 OpenCR 中运行的控制器发送命令我们提供处理源代码作为
通过 USB 端口发送命令和接收操纵器状态的示例我们还将控制器配置为使用
RC100 控制器操作操纵器尝试使用 OpenCR 控制 OpenMANIPULATOR-X请
参阅下一章节
GUI 程序(数据处理)
RC100 远程遥控
挑战应用程序
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
您想要将 OpenMANIPULATOR-X 应用于实际工作吗尝试将新的 ROS 包应用于
OpenMANIPULATOR-X可以应用于各种任务我们提供了使用 Astra ProRealsence D435
和 Raspberry PI Camera V2 进行 AR 标记识别的示例请参阅下面的示例以挑战基于摄像
头的操作应用程序
摄像头应用程序
您想要在人类无法访问的区域运行OpenManipulator-X 吗您想要简单直观的运动计划吗
主从应用程序就是答案我们提供了一个例子通过链接两个打开的机械手 X 和操作主机
械手的手动指导教学可以很容易地创建运动通过以下链接尝试主从应用程序
主从配置
操纵器的设计
移动操纵
OpenMANIPULATOR-X 与 Turtlebot3 华夫具有完整的硬件组合通过组装
Turtlebot3 华夫和 OpenMANIPULATOR-X 挑战您的移动操作
修模
我们提出了一种替换和操作机械手的工具(夹持器)的方法以利用 OpenMANIPULATOR-X
实现更广泛的应用如下面的示例所示使用笔架或真空抓取器尝试新的应用程序并创建
自己的工具来挑战更多的应用程序
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
OpenMANIPULATOR Friends
修改 OpenMANIPULATOR-X 的硬件(DOF结构)和软件(运动学轨迹)并操作
您自己的 OpenMANIPULATOR我们提供各种 OpenMANIPULATOR-X 相似系列
产品作为硬件转换的示例试着用不同的结构控制机械手并针对不同的结构尝试运动学
求解算法
4装配
配件清单
必备的配件
配件名称 数量
底盘零件 链接框架(长) 1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
连接框架(短) 1
导轨支架(左) 1
导轨支架(右) 1
夹手 2
连接杆 2
法兰衬套 4
曲柄臂 1
轨道块 2
FR12-S101-K 结构件 1
FR12-S102-K 机构及 2
FR12-H101-K 结构件 2
FR12-H104-K 结构件 1
执行机构 舵机 XM430-W350-T 5
数据线 X3P-100 1
X3P-180 2
X3P-240 2
工具 螺丝刀 1
扳手-15 1
扳手-20 1
扳手-25 1
其他 X-SP 24
螺母-M25 16
螺母-M3 4
FHS-M25x14 12
WB-M2x3 38
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
WB-M2x4 4
WB-M25x4 4
WB-M25x6 8
WB-M25x8 16
WB-M25x12 4
WB-M25x17 4
WB-M25x20 4
WB-M3x10 4
DC12-IDLER 3
DC12-IDLER-帽 3
DC12-P-轴承 3
橡胶垫 2
可选配件
配件名称 数量
电源 SMPS 12V5A 1
电路板 OpenCR 1
U2D2 1
U2D2 电源供电板 1
板 底板-02 1
3D 打印配件
我们提供 OpenMANIPULATOR-X 配件的 3D CAD 文件用户可以轻松地修改和打印
3D CAD 文件()形状 Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
装配手册
OpenMANIPULATOR-X 交付是未组装的零件请按照装配说明进行组装
5[ROS] 设置 注意
该测试在安装在 Ubuntu 1604 中的 ROS Kinetic Kame 上完成
在执行这些说明之前请确保安装了 ROS 决定项-安装 ROS 数据包
警告如果您希望在 OpenCR(嵌入式板)上控制 OpenMANIPULATOR-X 而不是使用 ROS请按照
OpenCR 设置中的说明进行设置
电脑上安装 Ubuntu
把 Ubuntu 1604 下载并安装到您的电脑上教程指南将帮助您安装 Ubuntu 桌面
下载 Ubuntu
教程指南- 安装 Ubuntu 桌面
电脑上安装 ROS
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
下面的脚本将允许您简化 ROS 安装过程在终端窗口中运行以下命令终端应用程序可以
通过屏幕左上角的 Ubuntu 搜索图标找到打开终端的快捷键是 Ctrl+Alt+t安装完 ROS 后
请重新启动电脑
注意为了检查安装了哪些软件包请检查此链接 install_ros_kineticsh
如果您选择手动安装请按照下面的链接操作
Manual installation of ROS Kinetic
安装 ROS 数据包
安装 OpenMANIPULATOR-X 的相关软件包在终端窗口中运行以下命令
注意终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
通讯转换器
U2D2
连接
将微型 USB(连接到 PC)舵机(OpenMANIPULATOR-X))和 12V 电源连接到 U2D2 和
U2D2 电源供电板如下所示
注意有关 U2D2 和 U2D2 电源供电板的详细连接请参阅 U2D2 E-手册和 U2D2 电源集
线器板 E-手册
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
USB 延迟计时器设置
在 Linux(Ubuntu 平台)环境中USB 延迟时间默认设置为 16ms按照以下步骤将舵机和
通过 USB 连接的 PC 之间的通信延迟时间设置为最小值(1 毫秒)
打开终端窗口并运行 roscore
在运行 Roscore 的情况下打开一个新的终端窗口并输入以下命令来设置 USB 延迟时间
提示输入的命令将 USB 延迟计时器设置为 1 毫秒如果您想查看设置请在终端中运行
以下命令cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
本节介绍如何将 OpenCR 设置为 PC 的 ROS 包与 OpenMANIPULATOR-X的舵机之间的
通信板
如果要在没有 ROS 的嵌入式系统(OpenCR)上操作 OpenMANIPULATOR-X 请参阅
OpenCR 设置
连接
将微型-USB (连接到 PC)舵机(OpenMANIPULATOR-X)和 12V 电源连接到 OpenCR
如下所示
注请参阅 OpenCR 的详细说明
上传源代码
请参阅以下页面以安装 Arduino IDE 并在 Arduino IDE 环境中启用 OpenCR 控制板
使用 OpenCR 的 Arduino IDE
完成上述所有设置后打开 Arduino IDE 并打开 usb to dxl 示例源代码如下所示按照
Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl 的顺序设置
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
关于 OpenMANIPULATOR-X 机械臂
OpenManipulator-X 是支持 ROS的一个完全开放的机器人平台由开源软件开源硬
件以及 OpenCR(嵌入式控制板)组成首先 从概述和说明章节获得信息以全面了解
OpenManipulator-X
OpenMANIPULATOR-X 机械臂设置
当您从上述步骤对 OpenManipulator-X 有足够的了解时建议按以下顺序进行
硬件设置
1 检查配件清单 OpenMANIPULATOR-X 仅包含配置OpenManipulator-X主体所需的零
件为了控制和操作 OpenMANIPULATOR-X请选择购买有些必要的配件请查看配
件列表准备好所需的所有配件12V 5A 的电源是用于为 OpenMANIPULATOR-X 的
舵机提供 12V 电源的必备配件底板 02 用于将 OpenManipulator-X 固定到工作区间
您需要准备的控制器或通信板取决于您的开发环境如果您想在嵌入式系统上开发请
准备 OpenCR 和 PC要使用 ROS请准备好您的电脑和 u2d2+u2d2 电源供电板或
OpenCR综上所述需准备的配件如下表所示
2 装配 请按照装配手册的说明装配 OpenManipulator-X
配件清单
ROS 开发环境 嵌入式环境
机械臂 OpenMANIPULATOR-X OpenMANIPULATOR-X
板 Base Plate-02 Base Plate-02
电源 SMPS 12V5A SMPS 12V5A
控制板 OpenCR 或 U2D2+U2D2 电源供电板 OpenCR
连接电路板
OpenMANIPULATOR-X 要安装软件并运行您需要连上您的电脑及电路板您可以使
用 OpenCR 或者 U2D2+ U2D2 电源供电板作为电路板下面是一个简单的连接图有关详
细的连接方法请参阅[ROS]设置或[OpenCR]设置页
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
软件设置
OpenMANIPULATOR-X 实现了 ROS 开发环境和嵌入式系统(OpenCR)选择要运行
OpenMANIPULATOR-X 的开发环境并为该环境配置软件
ROS 环境
在 ROS 开发环境中您可以使用 ROS 提供的各种包以及我们的 ROS 包运
行 OpenMANIPULATOR-X在这种情况下运行 OpenMANIPULATOR-X 的所
有过程都是在 PC 机上完成的而电路板仅用于将 PC 机发出的数字信号转换成
舵机中使用的通信信号如果要在 ROS 环境中运行 OpenMANIPULATOR-X
请根据[ROS]设置章节在 PC 上安装 LinuxROS 和 ROS 包
嵌入式系统
如果您在嵌入式系统(OpenCR)中使用 OpenMANIPULATOR-X您可以轻松地将您
的算法应用到一个易于使用的系统(如 Arduino IDE)上运行 OpenMANIPULATOR-X在
这种情况下运行 OpenMANIPULATOR-X 的主要过程是在嵌入式系统内完成的并且可以
使用 PC 的 GUI 程序操纵杆控制器或简单的传感器向嵌入式系统发送命令如果要在嵌入
式系统上运行 OpenMANIPULATOR-X请在 PC 上安装软件并按照[OpenCR]设置章节设
置 OpenCR
基本操作
ROS 环境的基本运行
完成上述步骤后通过提供的控制器包运行 OpenMANIPULATOR-X您可以通过 ROS
消息命令 OpenMANIPULATOR-X 移动特定位置请参阅下一页以运行控制器包并测试它是
否工作正常
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
控制器包
成功运行控制器包之后可以使用我们提供的包将 ROS 消息发布到控制器包从而运行
OpenMANIPULATOR-X下面的基本操作示例作为用于 ROS 发布的消息数据包提供
GUI 程序
远程操作
OpenMANIPULATOR-X 也可以使用 MoveIt 操作您可以运行使用 MoveIt 的控制器包
通过更改控制器包的启动文件中的变量请参考以下章节并尝试使用 MoveIt 进行各种动
作
MoveIt
嵌入式系统的基本操作
OpenMANIPULATOR-X 不仅可以使用 ROS 操作还可以使用简单的嵌入式系
统(OpenCR)在嵌入式系统(OpenCR)中在 OpenCR 内部操作运行
OpenManipulator-X 的控制过程请参阅以下页面将控制器上载到 OpenCR
上传控制器
有多种方法可以向 OpenCR 中运行的控制器发送命令我们提供处理源代码作为
通过 USB 端口发送命令和接收操纵器状态的示例我们还将控制器配置为使用
RC100 控制器操作操纵器尝试使用 OpenCR 控制 OpenMANIPULATOR-X请
参阅下一章节
GUI 程序(数据处理)
RC100 远程遥控
挑战应用程序
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
您想要将 OpenMANIPULATOR-X 应用于实际工作吗尝试将新的 ROS 包应用于
OpenMANIPULATOR-X可以应用于各种任务我们提供了使用 Astra ProRealsence D435
和 Raspberry PI Camera V2 进行 AR 标记识别的示例请参阅下面的示例以挑战基于摄像
头的操作应用程序
摄像头应用程序
您想要在人类无法访问的区域运行OpenManipulator-X 吗您想要简单直观的运动计划吗
主从应用程序就是答案我们提供了一个例子通过链接两个打开的机械手 X 和操作主机
械手的手动指导教学可以很容易地创建运动通过以下链接尝试主从应用程序
主从配置
操纵器的设计
移动操纵
OpenMANIPULATOR-X 与 Turtlebot3 华夫具有完整的硬件组合通过组装
Turtlebot3 华夫和 OpenMANIPULATOR-X 挑战您的移动操作
修模
我们提出了一种替换和操作机械手的工具(夹持器)的方法以利用 OpenMANIPULATOR-X
实现更广泛的应用如下面的示例所示使用笔架或真空抓取器尝试新的应用程序并创建
自己的工具来挑战更多的应用程序
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
OpenMANIPULATOR Friends
修改 OpenMANIPULATOR-X 的硬件(DOF结构)和软件(运动学轨迹)并操作
您自己的 OpenMANIPULATOR我们提供各种 OpenMANIPULATOR-X 相似系列
产品作为硬件转换的示例试着用不同的结构控制机械手并针对不同的结构尝试运动学
求解算法
4装配
配件清单
必备的配件
配件名称 数量
底盘零件 链接框架(长) 1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
连接框架(短) 1
导轨支架(左) 1
导轨支架(右) 1
夹手 2
连接杆 2
法兰衬套 4
曲柄臂 1
轨道块 2
FR12-S101-K 结构件 1
FR12-S102-K 机构及 2
FR12-H101-K 结构件 2
FR12-H104-K 结构件 1
执行机构 舵机 XM430-W350-T 5
数据线 X3P-100 1
X3P-180 2
X3P-240 2
工具 螺丝刀 1
扳手-15 1
扳手-20 1
扳手-25 1
其他 X-SP 24
螺母-M25 16
螺母-M3 4
FHS-M25x14 12
WB-M2x3 38
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
WB-M2x4 4
WB-M25x4 4
WB-M25x6 8
WB-M25x8 16
WB-M25x12 4
WB-M25x17 4
WB-M25x20 4
WB-M3x10 4
DC12-IDLER 3
DC12-IDLER-帽 3
DC12-P-轴承 3
橡胶垫 2
可选配件
配件名称 数量
电源 SMPS 12V5A 1
电路板 OpenCR 1
U2D2 1
U2D2 电源供电板 1
板 底板-02 1
3D 打印配件
我们提供 OpenMANIPULATOR-X 配件的 3D CAD 文件用户可以轻松地修改和打印
3D CAD 文件()形状 Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
装配手册
OpenMANIPULATOR-X 交付是未组装的零件请按照装配说明进行组装
5[ROS] 设置 注意
该测试在安装在 Ubuntu 1604 中的 ROS Kinetic Kame 上完成
在执行这些说明之前请确保安装了 ROS 决定项-安装 ROS 数据包
警告如果您希望在 OpenCR(嵌入式板)上控制 OpenMANIPULATOR-X 而不是使用 ROS请按照
OpenCR 设置中的说明进行设置
电脑上安装 Ubuntu
把 Ubuntu 1604 下载并安装到您的电脑上教程指南将帮助您安装 Ubuntu 桌面
下载 Ubuntu
教程指南- 安装 Ubuntu 桌面
电脑上安装 ROS
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
下面的脚本将允许您简化 ROS 安装过程在终端窗口中运行以下命令终端应用程序可以
通过屏幕左上角的 Ubuntu 搜索图标找到打开终端的快捷键是 Ctrl+Alt+t安装完 ROS 后
请重新启动电脑
注意为了检查安装了哪些软件包请检查此链接 install_ros_kineticsh
如果您选择手动安装请按照下面的链接操作
Manual installation of ROS Kinetic
安装 ROS 数据包
安装 OpenMANIPULATOR-X 的相关软件包在终端窗口中运行以下命令
注意终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
通讯转换器
U2D2
连接
将微型 USB(连接到 PC)舵机(OpenMANIPULATOR-X))和 12V 电源连接到 U2D2 和
U2D2 电源供电板如下所示
注意有关 U2D2 和 U2D2 电源供电板的详细连接请参阅 U2D2 E-手册和 U2D2 电源集
线器板 E-手册
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
USB 延迟计时器设置
在 Linux(Ubuntu 平台)环境中USB 延迟时间默认设置为 16ms按照以下步骤将舵机和
通过 USB 连接的 PC 之间的通信延迟时间设置为最小值(1 毫秒)
打开终端窗口并运行 roscore
在运行 Roscore 的情况下打开一个新的终端窗口并输入以下命令来设置 USB 延迟时间
提示输入的命令将 USB 延迟计时器设置为 1 毫秒如果您想查看设置请在终端中运行
以下命令cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
本节介绍如何将 OpenCR 设置为 PC 的 ROS 包与 OpenMANIPULATOR-X的舵机之间的
通信板
如果要在没有 ROS 的嵌入式系统(OpenCR)上操作 OpenMANIPULATOR-X 请参阅
OpenCR 设置
连接
将微型-USB (连接到 PC)舵机(OpenMANIPULATOR-X)和 12V 电源连接到 OpenCR
如下所示
注请参阅 OpenCR 的详细说明
上传源代码
请参阅以下页面以安装 Arduino IDE 并在 Arduino IDE 环境中启用 OpenCR 控制板
使用 OpenCR 的 Arduino IDE
完成上述所有设置后打开 Arduino IDE 并打开 usb to dxl 示例源代码如下所示按照
Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl 的顺序设置
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
软件设置
OpenMANIPULATOR-X 实现了 ROS 开发环境和嵌入式系统(OpenCR)选择要运行
OpenMANIPULATOR-X 的开发环境并为该环境配置软件
ROS 环境
在 ROS 开发环境中您可以使用 ROS 提供的各种包以及我们的 ROS 包运
行 OpenMANIPULATOR-X在这种情况下运行 OpenMANIPULATOR-X 的所
有过程都是在 PC 机上完成的而电路板仅用于将 PC 机发出的数字信号转换成
舵机中使用的通信信号如果要在 ROS 环境中运行 OpenMANIPULATOR-X
请根据[ROS]设置章节在 PC 上安装 LinuxROS 和 ROS 包
嵌入式系统
如果您在嵌入式系统(OpenCR)中使用 OpenMANIPULATOR-X您可以轻松地将您
的算法应用到一个易于使用的系统(如 Arduino IDE)上运行 OpenMANIPULATOR-X在
这种情况下运行 OpenMANIPULATOR-X 的主要过程是在嵌入式系统内完成的并且可以
使用 PC 的 GUI 程序操纵杆控制器或简单的传感器向嵌入式系统发送命令如果要在嵌入
式系统上运行 OpenMANIPULATOR-X请在 PC 上安装软件并按照[OpenCR]设置章节设
置 OpenCR
基本操作
ROS 环境的基本运行
完成上述步骤后通过提供的控制器包运行 OpenMANIPULATOR-X您可以通过 ROS
消息命令 OpenMANIPULATOR-X 移动特定位置请参阅下一页以运行控制器包并测试它是
否工作正常
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
控制器包
成功运行控制器包之后可以使用我们提供的包将 ROS 消息发布到控制器包从而运行
OpenMANIPULATOR-X下面的基本操作示例作为用于 ROS 发布的消息数据包提供
GUI 程序
远程操作
OpenMANIPULATOR-X 也可以使用 MoveIt 操作您可以运行使用 MoveIt 的控制器包
通过更改控制器包的启动文件中的变量请参考以下章节并尝试使用 MoveIt 进行各种动
作
MoveIt
嵌入式系统的基本操作
OpenMANIPULATOR-X 不仅可以使用 ROS 操作还可以使用简单的嵌入式系
统(OpenCR)在嵌入式系统(OpenCR)中在 OpenCR 内部操作运行
OpenManipulator-X 的控制过程请参阅以下页面将控制器上载到 OpenCR
上传控制器
有多种方法可以向 OpenCR 中运行的控制器发送命令我们提供处理源代码作为
通过 USB 端口发送命令和接收操纵器状态的示例我们还将控制器配置为使用
RC100 控制器操作操纵器尝试使用 OpenCR 控制 OpenMANIPULATOR-X请
参阅下一章节
GUI 程序(数据处理)
RC100 远程遥控
挑战应用程序
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
您想要将 OpenMANIPULATOR-X 应用于实际工作吗尝试将新的 ROS 包应用于
OpenMANIPULATOR-X可以应用于各种任务我们提供了使用 Astra ProRealsence D435
和 Raspberry PI Camera V2 进行 AR 标记识别的示例请参阅下面的示例以挑战基于摄像
头的操作应用程序
摄像头应用程序
您想要在人类无法访问的区域运行OpenManipulator-X 吗您想要简单直观的运动计划吗
主从应用程序就是答案我们提供了一个例子通过链接两个打开的机械手 X 和操作主机
械手的手动指导教学可以很容易地创建运动通过以下链接尝试主从应用程序
主从配置
操纵器的设计
移动操纵
OpenMANIPULATOR-X 与 Turtlebot3 华夫具有完整的硬件组合通过组装
Turtlebot3 华夫和 OpenMANIPULATOR-X 挑战您的移动操作
修模
我们提出了一种替换和操作机械手的工具(夹持器)的方法以利用 OpenMANIPULATOR-X
实现更广泛的应用如下面的示例所示使用笔架或真空抓取器尝试新的应用程序并创建
自己的工具来挑战更多的应用程序
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
OpenMANIPULATOR Friends
修改 OpenMANIPULATOR-X 的硬件(DOF结构)和软件(运动学轨迹)并操作
您自己的 OpenMANIPULATOR我们提供各种 OpenMANIPULATOR-X 相似系列
产品作为硬件转换的示例试着用不同的结构控制机械手并针对不同的结构尝试运动学
求解算法
4装配
配件清单
必备的配件
配件名称 数量
底盘零件 链接框架(长) 1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
连接框架(短) 1
导轨支架(左) 1
导轨支架(右) 1
夹手 2
连接杆 2
法兰衬套 4
曲柄臂 1
轨道块 2
FR12-S101-K 结构件 1
FR12-S102-K 机构及 2
FR12-H101-K 结构件 2
FR12-H104-K 结构件 1
执行机构 舵机 XM430-W350-T 5
数据线 X3P-100 1
X3P-180 2
X3P-240 2
工具 螺丝刀 1
扳手-15 1
扳手-20 1
扳手-25 1
其他 X-SP 24
螺母-M25 16
螺母-M3 4
FHS-M25x14 12
WB-M2x3 38
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
WB-M2x4 4
WB-M25x4 4
WB-M25x6 8
WB-M25x8 16
WB-M25x12 4
WB-M25x17 4
WB-M25x20 4
WB-M3x10 4
DC12-IDLER 3
DC12-IDLER-帽 3
DC12-P-轴承 3
橡胶垫 2
可选配件
配件名称 数量
电源 SMPS 12V5A 1
电路板 OpenCR 1
U2D2 1
U2D2 电源供电板 1
板 底板-02 1
3D 打印配件
我们提供 OpenMANIPULATOR-X 配件的 3D CAD 文件用户可以轻松地修改和打印
3D CAD 文件()形状 Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
装配手册
OpenMANIPULATOR-X 交付是未组装的零件请按照装配说明进行组装
5[ROS] 设置 注意
该测试在安装在 Ubuntu 1604 中的 ROS Kinetic Kame 上完成
在执行这些说明之前请确保安装了 ROS 决定项-安装 ROS 数据包
警告如果您希望在 OpenCR(嵌入式板)上控制 OpenMANIPULATOR-X 而不是使用 ROS请按照
OpenCR 设置中的说明进行设置
电脑上安装 Ubuntu
把 Ubuntu 1604 下载并安装到您的电脑上教程指南将帮助您安装 Ubuntu 桌面
下载 Ubuntu
教程指南- 安装 Ubuntu 桌面
电脑上安装 ROS
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
下面的脚本将允许您简化 ROS 安装过程在终端窗口中运行以下命令终端应用程序可以
通过屏幕左上角的 Ubuntu 搜索图标找到打开终端的快捷键是 Ctrl+Alt+t安装完 ROS 后
请重新启动电脑
注意为了检查安装了哪些软件包请检查此链接 install_ros_kineticsh
如果您选择手动安装请按照下面的链接操作
Manual installation of ROS Kinetic
安装 ROS 数据包
安装 OpenMANIPULATOR-X 的相关软件包在终端窗口中运行以下命令
注意终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
通讯转换器
U2D2
连接
将微型 USB(连接到 PC)舵机(OpenMANIPULATOR-X))和 12V 电源连接到 U2D2 和
U2D2 电源供电板如下所示
注意有关 U2D2 和 U2D2 电源供电板的详细连接请参阅 U2D2 E-手册和 U2D2 电源集
线器板 E-手册
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
USB 延迟计时器设置
在 Linux(Ubuntu 平台)环境中USB 延迟时间默认设置为 16ms按照以下步骤将舵机和
通过 USB 连接的 PC 之间的通信延迟时间设置为最小值(1 毫秒)
打开终端窗口并运行 roscore
在运行 Roscore 的情况下打开一个新的终端窗口并输入以下命令来设置 USB 延迟时间
提示输入的命令将 USB 延迟计时器设置为 1 毫秒如果您想查看设置请在终端中运行
以下命令cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
本节介绍如何将 OpenCR 设置为 PC 的 ROS 包与 OpenMANIPULATOR-X的舵机之间的
通信板
如果要在没有 ROS 的嵌入式系统(OpenCR)上操作 OpenMANIPULATOR-X 请参阅
OpenCR 设置
连接
将微型-USB (连接到 PC)舵机(OpenMANIPULATOR-X)和 12V 电源连接到 OpenCR
如下所示
注请参阅 OpenCR 的详细说明
上传源代码
请参阅以下页面以安装 Arduino IDE 并在 Arduino IDE 环境中启用 OpenCR 控制板
使用 OpenCR 的 Arduino IDE
完成上述所有设置后打开 Arduino IDE 并打开 usb to dxl 示例源代码如下所示按照
Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl 的顺序设置
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
控制器包
成功运行控制器包之后可以使用我们提供的包将 ROS 消息发布到控制器包从而运行
OpenMANIPULATOR-X下面的基本操作示例作为用于 ROS 发布的消息数据包提供
GUI 程序
远程操作
OpenMANIPULATOR-X 也可以使用 MoveIt 操作您可以运行使用 MoveIt 的控制器包
通过更改控制器包的启动文件中的变量请参考以下章节并尝试使用 MoveIt 进行各种动
作
MoveIt
嵌入式系统的基本操作
OpenMANIPULATOR-X 不仅可以使用 ROS 操作还可以使用简单的嵌入式系
统(OpenCR)在嵌入式系统(OpenCR)中在 OpenCR 内部操作运行
OpenManipulator-X 的控制过程请参阅以下页面将控制器上载到 OpenCR
上传控制器
有多种方法可以向 OpenCR 中运行的控制器发送命令我们提供处理源代码作为
通过 USB 端口发送命令和接收操纵器状态的示例我们还将控制器配置为使用
RC100 控制器操作操纵器尝试使用 OpenCR 控制 OpenMANIPULATOR-X请
参阅下一章节
GUI 程序(数据处理)
RC100 远程遥控
挑战应用程序
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
您想要将 OpenMANIPULATOR-X 应用于实际工作吗尝试将新的 ROS 包应用于
OpenMANIPULATOR-X可以应用于各种任务我们提供了使用 Astra ProRealsence D435
和 Raspberry PI Camera V2 进行 AR 标记识别的示例请参阅下面的示例以挑战基于摄像
头的操作应用程序
摄像头应用程序
您想要在人类无法访问的区域运行OpenManipulator-X 吗您想要简单直观的运动计划吗
主从应用程序就是答案我们提供了一个例子通过链接两个打开的机械手 X 和操作主机
械手的手动指导教学可以很容易地创建运动通过以下链接尝试主从应用程序
主从配置
操纵器的设计
移动操纵
OpenMANIPULATOR-X 与 Turtlebot3 华夫具有完整的硬件组合通过组装
Turtlebot3 华夫和 OpenMANIPULATOR-X 挑战您的移动操作
修模
我们提出了一种替换和操作机械手的工具(夹持器)的方法以利用 OpenMANIPULATOR-X
实现更广泛的应用如下面的示例所示使用笔架或真空抓取器尝试新的应用程序并创建
自己的工具来挑战更多的应用程序
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
OpenMANIPULATOR Friends
修改 OpenMANIPULATOR-X 的硬件(DOF结构)和软件(运动学轨迹)并操作
您自己的 OpenMANIPULATOR我们提供各种 OpenMANIPULATOR-X 相似系列
产品作为硬件转换的示例试着用不同的结构控制机械手并针对不同的结构尝试运动学
求解算法
4装配
配件清单
必备的配件
配件名称 数量
底盘零件 链接框架(长) 1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
连接框架(短) 1
导轨支架(左) 1
导轨支架(右) 1
夹手 2
连接杆 2
法兰衬套 4
曲柄臂 1
轨道块 2
FR12-S101-K 结构件 1
FR12-S102-K 机构及 2
FR12-H101-K 结构件 2
FR12-H104-K 结构件 1
执行机构 舵机 XM430-W350-T 5
数据线 X3P-100 1
X3P-180 2
X3P-240 2
工具 螺丝刀 1
扳手-15 1
扳手-20 1
扳手-25 1
其他 X-SP 24
螺母-M25 16
螺母-M3 4
FHS-M25x14 12
WB-M2x3 38
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
WB-M2x4 4
WB-M25x4 4
WB-M25x6 8
WB-M25x8 16
WB-M25x12 4
WB-M25x17 4
WB-M25x20 4
WB-M3x10 4
DC12-IDLER 3
DC12-IDLER-帽 3
DC12-P-轴承 3
橡胶垫 2
可选配件
配件名称 数量
电源 SMPS 12V5A 1
电路板 OpenCR 1
U2D2 1
U2D2 电源供电板 1
板 底板-02 1
3D 打印配件
我们提供 OpenMANIPULATOR-X 配件的 3D CAD 文件用户可以轻松地修改和打印
3D CAD 文件()形状 Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
装配手册
OpenMANIPULATOR-X 交付是未组装的零件请按照装配说明进行组装
5[ROS] 设置 注意
该测试在安装在 Ubuntu 1604 中的 ROS Kinetic Kame 上完成
在执行这些说明之前请确保安装了 ROS 决定项-安装 ROS 数据包
警告如果您希望在 OpenCR(嵌入式板)上控制 OpenMANIPULATOR-X 而不是使用 ROS请按照
OpenCR 设置中的说明进行设置
电脑上安装 Ubuntu
把 Ubuntu 1604 下载并安装到您的电脑上教程指南将帮助您安装 Ubuntu 桌面
下载 Ubuntu
教程指南- 安装 Ubuntu 桌面
电脑上安装 ROS
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
下面的脚本将允许您简化 ROS 安装过程在终端窗口中运行以下命令终端应用程序可以
通过屏幕左上角的 Ubuntu 搜索图标找到打开终端的快捷键是 Ctrl+Alt+t安装完 ROS 后
请重新启动电脑
注意为了检查安装了哪些软件包请检查此链接 install_ros_kineticsh
如果您选择手动安装请按照下面的链接操作
Manual installation of ROS Kinetic
安装 ROS 数据包
安装 OpenMANIPULATOR-X 的相关软件包在终端窗口中运行以下命令
注意终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
通讯转换器
U2D2
连接
将微型 USB(连接到 PC)舵机(OpenMANIPULATOR-X))和 12V 电源连接到 U2D2 和
U2D2 电源供电板如下所示
注意有关 U2D2 和 U2D2 电源供电板的详细连接请参阅 U2D2 E-手册和 U2D2 电源集
线器板 E-手册
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
USB 延迟计时器设置
在 Linux(Ubuntu 平台)环境中USB 延迟时间默认设置为 16ms按照以下步骤将舵机和
通过 USB 连接的 PC 之间的通信延迟时间设置为最小值(1 毫秒)
打开终端窗口并运行 roscore
在运行 Roscore 的情况下打开一个新的终端窗口并输入以下命令来设置 USB 延迟时间
提示输入的命令将 USB 延迟计时器设置为 1 毫秒如果您想查看设置请在终端中运行
以下命令cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
本节介绍如何将 OpenCR 设置为 PC 的 ROS 包与 OpenMANIPULATOR-X的舵机之间的
通信板
如果要在没有 ROS 的嵌入式系统(OpenCR)上操作 OpenMANIPULATOR-X 请参阅
OpenCR 设置
连接
将微型-USB (连接到 PC)舵机(OpenMANIPULATOR-X)和 12V 电源连接到 OpenCR
如下所示
注请参阅 OpenCR 的详细说明
上传源代码
请参阅以下页面以安装 Arduino IDE 并在 Arduino IDE 环境中启用 OpenCR 控制板
使用 OpenCR 的 Arduino IDE
完成上述所有设置后打开 Arduino IDE 并打开 usb to dxl 示例源代码如下所示按照
Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl 的顺序设置
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
您想要将 OpenMANIPULATOR-X 应用于实际工作吗尝试将新的 ROS 包应用于
OpenMANIPULATOR-X可以应用于各种任务我们提供了使用 Astra ProRealsence D435
和 Raspberry PI Camera V2 进行 AR 标记识别的示例请参阅下面的示例以挑战基于摄像
头的操作应用程序
摄像头应用程序
您想要在人类无法访问的区域运行OpenManipulator-X 吗您想要简单直观的运动计划吗
主从应用程序就是答案我们提供了一个例子通过链接两个打开的机械手 X 和操作主机
械手的手动指导教学可以很容易地创建运动通过以下链接尝试主从应用程序
主从配置
操纵器的设计
移动操纵
OpenMANIPULATOR-X 与 Turtlebot3 华夫具有完整的硬件组合通过组装
Turtlebot3 华夫和 OpenMANIPULATOR-X 挑战您的移动操作
修模
我们提出了一种替换和操作机械手的工具(夹持器)的方法以利用 OpenMANIPULATOR-X
实现更广泛的应用如下面的示例所示使用笔架或真空抓取器尝试新的应用程序并创建
自己的工具来挑战更多的应用程序
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
OpenMANIPULATOR Friends
修改 OpenMANIPULATOR-X 的硬件(DOF结构)和软件(运动学轨迹)并操作
您自己的 OpenMANIPULATOR我们提供各种 OpenMANIPULATOR-X 相似系列
产品作为硬件转换的示例试着用不同的结构控制机械手并针对不同的结构尝试运动学
求解算法
4装配
配件清单
必备的配件
配件名称 数量
底盘零件 链接框架(长) 1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
连接框架(短) 1
导轨支架(左) 1
导轨支架(右) 1
夹手 2
连接杆 2
法兰衬套 4
曲柄臂 1
轨道块 2
FR12-S101-K 结构件 1
FR12-S102-K 机构及 2
FR12-H101-K 结构件 2
FR12-H104-K 结构件 1
执行机构 舵机 XM430-W350-T 5
数据线 X3P-100 1
X3P-180 2
X3P-240 2
工具 螺丝刀 1
扳手-15 1
扳手-20 1
扳手-25 1
其他 X-SP 24
螺母-M25 16
螺母-M3 4
FHS-M25x14 12
WB-M2x3 38
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
WB-M2x4 4
WB-M25x4 4
WB-M25x6 8
WB-M25x8 16
WB-M25x12 4
WB-M25x17 4
WB-M25x20 4
WB-M3x10 4
DC12-IDLER 3
DC12-IDLER-帽 3
DC12-P-轴承 3
橡胶垫 2
可选配件
配件名称 数量
电源 SMPS 12V5A 1
电路板 OpenCR 1
U2D2 1
U2D2 电源供电板 1
板 底板-02 1
3D 打印配件
我们提供 OpenMANIPULATOR-X 配件的 3D CAD 文件用户可以轻松地修改和打印
3D CAD 文件()形状 Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
装配手册
OpenMANIPULATOR-X 交付是未组装的零件请按照装配说明进行组装
5[ROS] 设置 注意
该测试在安装在 Ubuntu 1604 中的 ROS Kinetic Kame 上完成
在执行这些说明之前请确保安装了 ROS 决定项-安装 ROS 数据包
警告如果您希望在 OpenCR(嵌入式板)上控制 OpenMANIPULATOR-X 而不是使用 ROS请按照
OpenCR 设置中的说明进行设置
电脑上安装 Ubuntu
把 Ubuntu 1604 下载并安装到您的电脑上教程指南将帮助您安装 Ubuntu 桌面
下载 Ubuntu
教程指南- 安装 Ubuntu 桌面
电脑上安装 ROS
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
下面的脚本将允许您简化 ROS 安装过程在终端窗口中运行以下命令终端应用程序可以
通过屏幕左上角的 Ubuntu 搜索图标找到打开终端的快捷键是 Ctrl+Alt+t安装完 ROS 后
请重新启动电脑
注意为了检查安装了哪些软件包请检查此链接 install_ros_kineticsh
如果您选择手动安装请按照下面的链接操作
Manual installation of ROS Kinetic
安装 ROS 数据包
安装 OpenMANIPULATOR-X 的相关软件包在终端窗口中运行以下命令
注意终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
通讯转换器
U2D2
连接
将微型 USB(连接到 PC)舵机(OpenMANIPULATOR-X))和 12V 电源连接到 U2D2 和
U2D2 电源供电板如下所示
注意有关 U2D2 和 U2D2 电源供电板的详细连接请参阅 U2D2 E-手册和 U2D2 电源集
线器板 E-手册
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
USB 延迟计时器设置
在 Linux(Ubuntu 平台)环境中USB 延迟时间默认设置为 16ms按照以下步骤将舵机和
通过 USB 连接的 PC 之间的通信延迟时间设置为最小值(1 毫秒)
打开终端窗口并运行 roscore
在运行 Roscore 的情况下打开一个新的终端窗口并输入以下命令来设置 USB 延迟时间
提示输入的命令将 USB 延迟计时器设置为 1 毫秒如果您想查看设置请在终端中运行
以下命令cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
本节介绍如何将 OpenCR 设置为 PC 的 ROS 包与 OpenMANIPULATOR-X的舵机之间的
通信板
如果要在没有 ROS 的嵌入式系统(OpenCR)上操作 OpenMANIPULATOR-X 请参阅
OpenCR 设置
连接
将微型-USB (连接到 PC)舵机(OpenMANIPULATOR-X)和 12V 电源连接到 OpenCR
如下所示
注请参阅 OpenCR 的详细说明
上传源代码
请参阅以下页面以安装 Arduino IDE 并在 Arduino IDE 环境中启用 OpenCR 控制板
使用 OpenCR 的 Arduino IDE
完成上述所有设置后打开 Arduino IDE 并打开 usb to dxl 示例源代码如下所示按照
Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl 的顺序设置
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
OpenMANIPULATOR Friends
修改 OpenMANIPULATOR-X 的硬件(DOF结构)和软件(运动学轨迹)并操作
您自己的 OpenMANIPULATOR我们提供各种 OpenMANIPULATOR-X 相似系列
产品作为硬件转换的示例试着用不同的结构控制机械手并针对不同的结构尝试运动学
求解算法
4装配
配件清单
必备的配件
配件名称 数量
底盘零件 链接框架(长) 1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
连接框架(短) 1
导轨支架(左) 1
导轨支架(右) 1
夹手 2
连接杆 2
法兰衬套 4
曲柄臂 1
轨道块 2
FR12-S101-K 结构件 1
FR12-S102-K 机构及 2
FR12-H101-K 结构件 2
FR12-H104-K 结构件 1
执行机构 舵机 XM430-W350-T 5
数据线 X3P-100 1
X3P-180 2
X3P-240 2
工具 螺丝刀 1
扳手-15 1
扳手-20 1
扳手-25 1
其他 X-SP 24
螺母-M25 16
螺母-M3 4
FHS-M25x14 12
WB-M2x3 38
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
WB-M2x4 4
WB-M25x4 4
WB-M25x6 8
WB-M25x8 16
WB-M25x12 4
WB-M25x17 4
WB-M25x20 4
WB-M3x10 4
DC12-IDLER 3
DC12-IDLER-帽 3
DC12-P-轴承 3
橡胶垫 2
可选配件
配件名称 数量
电源 SMPS 12V5A 1
电路板 OpenCR 1
U2D2 1
U2D2 电源供电板 1
板 底板-02 1
3D 打印配件
我们提供 OpenMANIPULATOR-X 配件的 3D CAD 文件用户可以轻松地修改和打印
3D CAD 文件()形状 Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
装配手册
OpenMANIPULATOR-X 交付是未组装的零件请按照装配说明进行组装
5[ROS] 设置 注意
该测试在安装在 Ubuntu 1604 中的 ROS Kinetic Kame 上完成
在执行这些说明之前请确保安装了 ROS 决定项-安装 ROS 数据包
警告如果您希望在 OpenCR(嵌入式板)上控制 OpenMANIPULATOR-X 而不是使用 ROS请按照
OpenCR 设置中的说明进行设置
电脑上安装 Ubuntu
把 Ubuntu 1604 下载并安装到您的电脑上教程指南将帮助您安装 Ubuntu 桌面
下载 Ubuntu
教程指南- 安装 Ubuntu 桌面
电脑上安装 ROS
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
下面的脚本将允许您简化 ROS 安装过程在终端窗口中运行以下命令终端应用程序可以
通过屏幕左上角的 Ubuntu 搜索图标找到打开终端的快捷键是 Ctrl+Alt+t安装完 ROS 后
请重新启动电脑
注意为了检查安装了哪些软件包请检查此链接 install_ros_kineticsh
如果您选择手动安装请按照下面的链接操作
Manual installation of ROS Kinetic
安装 ROS 数据包
安装 OpenMANIPULATOR-X 的相关软件包在终端窗口中运行以下命令
注意终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
通讯转换器
U2D2
连接
将微型 USB(连接到 PC)舵机(OpenMANIPULATOR-X))和 12V 电源连接到 U2D2 和
U2D2 电源供电板如下所示
注意有关 U2D2 和 U2D2 电源供电板的详细连接请参阅 U2D2 E-手册和 U2D2 电源集
线器板 E-手册
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
USB 延迟计时器设置
在 Linux(Ubuntu 平台)环境中USB 延迟时间默认设置为 16ms按照以下步骤将舵机和
通过 USB 连接的 PC 之间的通信延迟时间设置为最小值(1 毫秒)
打开终端窗口并运行 roscore
在运行 Roscore 的情况下打开一个新的终端窗口并输入以下命令来设置 USB 延迟时间
提示输入的命令将 USB 延迟计时器设置为 1 毫秒如果您想查看设置请在终端中运行
以下命令cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
本节介绍如何将 OpenCR 设置为 PC 的 ROS 包与 OpenMANIPULATOR-X的舵机之间的
通信板
如果要在没有 ROS 的嵌入式系统(OpenCR)上操作 OpenMANIPULATOR-X 请参阅
OpenCR 设置
连接
将微型-USB (连接到 PC)舵机(OpenMANIPULATOR-X)和 12V 电源连接到 OpenCR
如下所示
注请参阅 OpenCR 的详细说明
上传源代码
请参阅以下页面以安装 Arduino IDE 并在 Arduino IDE 环境中启用 OpenCR 控制板
使用 OpenCR 的 Arduino IDE
完成上述所有设置后打开 Arduino IDE 并打开 usb to dxl 示例源代码如下所示按照
Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl 的顺序设置
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
连接框架(短) 1
导轨支架(左) 1
导轨支架(右) 1
夹手 2
连接杆 2
法兰衬套 4
曲柄臂 1
轨道块 2
FR12-S101-K 结构件 1
FR12-S102-K 机构及 2
FR12-H101-K 结构件 2
FR12-H104-K 结构件 1
执行机构 舵机 XM430-W350-T 5
数据线 X3P-100 1
X3P-180 2
X3P-240 2
工具 螺丝刀 1
扳手-15 1
扳手-20 1
扳手-25 1
其他 X-SP 24
螺母-M25 16
螺母-M3 4
FHS-M25x14 12
WB-M2x3 38
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
WB-M2x4 4
WB-M25x4 4
WB-M25x6 8
WB-M25x8 16
WB-M25x12 4
WB-M25x17 4
WB-M25x20 4
WB-M3x10 4
DC12-IDLER 3
DC12-IDLER-帽 3
DC12-P-轴承 3
橡胶垫 2
可选配件
配件名称 数量
电源 SMPS 12V5A 1
电路板 OpenCR 1
U2D2 1
U2D2 电源供电板 1
板 底板-02 1
3D 打印配件
我们提供 OpenMANIPULATOR-X 配件的 3D CAD 文件用户可以轻松地修改和打印
3D CAD 文件()形状 Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
装配手册
OpenMANIPULATOR-X 交付是未组装的零件请按照装配说明进行组装
5[ROS] 设置 注意
该测试在安装在 Ubuntu 1604 中的 ROS Kinetic Kame 上完成
在执行这些说明之前请确保安装了 ROS 决定项-安装 ROS 数据包
警告如果您希望在 OpenCR(嵌入式板)上控制 OpenMANIPULATOR-X 而不是使用 ROS请按照
OpenCR 设置中的说明进行设置
电脑上安装 Ubuntu
把 Ubuntu 1604 下载并安装到您的电脑上教程指南将帮助您安装 Ubuntu 桌面
下载 Ubuntu
教程指南- 安装 Ubuntu 桌面
电脑上安装 ROS
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
下面的脚本将允许您简化 ROS 安装过程在终端窗口中运行以下命令终端应用程序可以
通过屏幕左上角的 Ubuntu 搜索图标找到打开终端的快捷键是 Ctrl+Alt+t安装完 ROS 后
请重新启动电脑
注意为了检查安装了哪些软件包请检查此链接 install_ros_kineticsh
如果您选择手动安装请按照下面的链接操作
Manual installation of ROS Kinetic
安装 ROS 数据包
安装 OpenMANIPULATOR-X 的相关软件包在终端窗口中运行以下命令
注意终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
通讯转换器
U2D2
连接
将微型 USB(连接到 PC)舵机(OpenMANIPULATOR-X))和 12V 电源连接到 U2D2 和
U2D2 电源供电板如下所示
注意有关 U2D2 和 U2D2 电源供电板的详细连接请参阅 U2D2 E-手册和 U2D2 电源集
线器板 E-手册
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
USB 延迟计时器设置
在 Linux(Ubuntu 平台)环境中USB 延迟时间默认设置为 16ms按照以下步骤将舵机和
通过 USB 连接的 PC 之间的通信延迟时间设置为最小值(1 毫秒)
打开终端窗口并运行 roscore
在运行 Roscore 的情况下打开一个新的终端窗口并输入以下命令来设置 USB 延迟时间
提示输入的命令将 USB 延迟计时器设置为 1 毫秒如果您想查看设置请在终端中运行
以下命令cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
本节介绍如何将 OpenCR 设置为 PC 的 ROS 包与 OpenMANIPULATOR-X的舵机之间的
通信板
如果要在没有 ROS 的嵌入式系统(OpenCR)上操作 OpenMANIPULATOR-X 请参阅
OpenCR 设置
连接
将微型-USB (连接到 PC)舵机(OpenMANIPULATOR-X)和 12V 电源连接到 OpenCR
如下所示
注请参阅 OpenCR 的详细说明
上传源代码
请参阅以下页面以安装 Arduino IDE 并在 Arduino IDE 环境中启用 OpenCR 控制板
使用 OpenCR 的 Arduino IDE
完成上述所有设置后打开 Arduino IDE 并打开 usb to dxl 示例源代码如下所示按照
Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl 的顺序设置
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
配件名称 数量
WB-M2x4 4
WB-M25x4 4
WB-M25x6 8
WB-M25x8 16
WB-M25x12 4
WB-M25x17 4
WB-M25x20 4
WB-M3x10 4
DC12-IDLER 3
DC12-IDLER-帽 3
DC12-P-轴承 3
橡胶垫 2
可选配件
配件名称 数量
电源 SMPS 12V5A 1
电路板 OpenCR 1
U2D2 1
U2D2 电源供电板 1
板 底板-02 1
3D 打印配件
我们提供 OpenMANIPULATOR-X 配件的 3D CAD 文件用户可以轻松地修改和打印
3D CAD 文件()形状 Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
装配手册
OpenMANIPULATOR-X 交付是未组装的零件请按照装配说明进行组装
5[ROS] 设置 注意
该测试在安装在 Ubuntu 1604 中的 ROS Kinetic Kame 上完成
在执行这些说明之前请确保安装了 ROS 决定项-安装 ROS 数据包
警告如果您希望在 OpenCR(嵌入式板)上控制 OpenMANIPULATOR-X 而不是使用 ROS请按照
OpenCR 设置中的说明进行设置
电脑上安装 Ubuntu
把 Ubuntu 1604 下载并安装到您的电脑上教程指南将帮助您安装 Ubuntu 桌面
下载 Ubuntu
教程指南- 安装 Ubuntu 桌面
电脑上安装 ROS
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
下面的脚本将允许您简化 ROS 安装过程在终端窗口中运行以下命令终端应用程序可以
通过屏幕左上角的 Ubuntu 搜索图标找到打开终端的快捷键是 Ctrl+Alt+t安装完 ROS 后
请重新启动电脑
注意为了检查安装了哪些软件包请检查此链接 install_ros_kineticsh
如果您选择手动安装请按照下面的链接操作
Manual installation of ROS Kinetic
安装 ROS 数据包
安装 OpenMANIPULATOR-X 的相关软件包在终端窗口中运行以下命令
注意终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
通讯转换器
U2D2
连接
将微型 USB(连接到 PC)舵机(OpenMANIPULATOR-X))和 12V 电源连接到 U2D2 和
U2D2 电源供电板如下所示
注意有关 U2D2 和 U2D2 电源供电板的详细连接请参阅 U2D2 E-手册和 U2D2 电源集
线器板 E-手册
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
USB 延迟计时器设置
在 Linux(Ubuntu 平台)环境中USB 延迟时间默认设置为 16ms按照以下步骤将舵机和
通过 USB 连接的 PC 之间的通信延迟时间设置为最小值(1 毫秒)
打开终端窗口并运行 roscore
在运行 Roscore 的情况下打开一个新的终端窗口并输入以下命令来设置 USB 延迟时间
提示输入的命令将 USB 延迟计时器设置为 1 毫秒如果您想查看设置请在终端中运行
以下命令cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
本节介绍如何将 OpenCR 设置为 PC 的 ROS 包与 OpenMANIPULATOR-X的舵机之间的
通信板
如果要在没有 ROS 的嵌入式系统(OpenCR)上操作 OpenMANIPULATOR-X 请参阅
OpenCR 设置
连接
将微型-USB (连接到 PC)舵机(OpenMANIPULATOR-X)和 12V 电源连接到 OpenCR
如下所示
注请参阅 OpenCR 的详细说明
上传源代码
请参阅以下页面以安装 Arduino IDE 并在 Arduino IDE 环境中启用 OpenCR 控制板
使用 OpenCR 的 Arduino IDE
完成上述所有设置后打开 Arduino IDE 并打开 usb to dxl 示例源代码如下所示按照
Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl 的顺序设置
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
装配手册
OpenMANIPULATOR-X 交付是未组装的零件请按照装配说明进行组装
5[ROS] 设置 注意
该测试在安装在 Ubuntu 1604 中的 ROS Kinetic Kame 上完成
在执行这些说明之前请确保安装了 ROS 决定项-安装 ROS 数据包
警告如果您希望在 OpenCR(嵌入式板)上控制 OpenMANIPULATOR-X 而不是使用 ROS请按照
OpenCR 设置中的说明进行设置
电脑上安装 Ubuntu
把 Ubuntu 1604 下载并安装到您的电脑上教程指南将帮助您安装 Ubuntu 桌面
下载 Ubuntu
教程指南- 安装 Ubuntu 桌面
电脑上安装 ROS
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
下面的脚本将允许您简化 ROS 安装过程在终端窗口中运行以下命令终端应用程序可以
通过屏幕左上角的 Ubuntu 搜索图标找到打开终端的快捷键是 Ctrl+Alt+t安装完 ROS 后
请重新启动电脑
注意为了检查安装了哪些软件包请检查此链接 install_ros_kineticsh
如果您选择手动安装请按照下面的链接操作
Manual installation of ROS Kinetic
安装 ROS 数据包
安装 OpenMANIPULATOR-X 的相关软件包在终端窗口中运行以下命令
注意终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
通讯转换器
U2D2
连接
将微型 USB(连接到 PC)舵机(OpenMANIPULATOR-X))和 12V 电源连接到 U2D2 和
U2D2 电源供电板如下所示
注意有关 U2D2 和 U2D2 电源供电板的详细连接请参阅 U2D2 E-手册和 U2D2 电源集
线器板 E-手册
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
USB 延迟计时器设置
在 Linux(Ubuntu 平台)环境中USB 延迟时间默认设置为 16ms按照以下步骤将舵机和
通过 USB 连接的 PC 之间的通信延迟时间设置为最小值(1 毫秒)
打开终端窗口并运行 roscore
在运行 Roscore 的情况下打开一个新的终端窗口并输入以下命令来设置 USB 延迟时间
提示输入的命令将 USB 延迟计时器设置为 1 毫秒如果您想查看设置请在终端中运行
以下命令cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
本节介绍如何将 OpenCR 设置为 PC 的 ROS 包与 OpenMANIPULATOR-X的舵机之间的
通信板
如果要在没有 ROS 的嵌入式系统(OpenCR)上操作 OpenMANIPULATOR-X 请参阅
OpenCR 设置
连接
将微型-USB (连接到 PC)舵机(OpenMANIPULATOR-X)和 12V 电源连接到 OpenCR
如下所示
注请参阅 OpenCR 的详细说明
上传源代码
请参阅以下页面以安装 Arduino IDE 并在 Arduino IDE 环境中启用 OpenCR 控制板
使用 OpenCR 的 Arduino IDE
完成上述所有设置后打开 Arduino IDE 并打开 usb to dxl 示例源代码如下所示按照
Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl 的顺序设置
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
下面的脚本将允许您简化 ROS 安装过程在终端窗口中运行以下命令终端应用程序可以
通过屏幕左上角的 Ubuntu 搜索图标找到打开终端的快捷键是 Ctrl+Alt+t安装完 ROS 后
请重新启动电脑
注意为了检查安装了哪些软件包请检查此链接 install_ros_kineticsh
如果您选择手动安装请按照下面的链接操作
Manual installation of ROS Kinetic
安装 ROS 数据包
安装 OpenMANIPULATOR-X 的相关软件包在终端窗口中运行以下命令
注意终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
通讯转换器
U2D2
连接
将微型 USB(连接到 PC)舵机(OpenMANIPULATOR-X))和 12V 电源连接到 U2D2 和
U2D2 电源供电板如下所示
注意有关 U2D2 和 U2D2 电源供电板的详细连接请参阅 U2D2 E-手册和 U2D2 电源集
线器板 E-手册
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
USB 延迟计时器设置
在 Linux(Ubuntu 平台)环境中USB 延迟时间默认设置为 16ms按照以下步骤将舵机和
通过 USB 连接的 PC 之间的通信延迟时间设置为最小值(1 毫秒)
打开终端窗口并运行 roscore
在运行 Roscore 的情况下打开一个新的终端窗口并输入以下命令来设置 USB 延迟时间
提示输入的命令将 USB 延迟计时器设置为 1 毫秒如果您想查看设置请在终端中运行
以下命令cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
本节介绍如何将 OpenCR 设置为 PC 的 ROS 包与 OpenMANIPULATOR-X的舵机之间的
通信板
如果要在没有 ROS 的嵌入式系统(OpenCR)上操作 OpenMANIPULATOR-X 请参阅
OpenCR 设置
连接
将微型-USB (连接到 PC)舵机(OpenMANIPULATOR-X)和 12V 电源连接到 OpenCR
如下所示
注请参阅 OpenCR 的详细说明
上传源代码
请参阅以下页面以安装 Arduino IDE 并在 Arduino IDE 环境中启用 OpenCR 控制板
使用 OpenCR 的 Arduino IDE
完成上述所有设置后打开 Arduino IDE 并打开 usb to dxl 示例源代码如下所示按照
Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl 的顺序设置
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
USB 延迟计时器设置
在 Linux(Ubuntu 平台)环境中USB 延迟时间默认设置为 16ms按照以下步骤将舵机和
通过 USB 连接的 PC 之间的通信延迟时间设置为最小值(1 毫秒)
打开终端窗口并运行 roscore
在运行 Roscore 的情况下打开一个新的终端窗口并输入以下命令来设置 USB 延迟时间
提示输入的命令将 USB 延迟计时器设置为 1 毫秒如果您想查看设置请在终端中运行
以下命令cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
本节介绍如何将 OpenCR 设置为 PC 的 ROS 包与 OpenMANIPULATOR-X的舵机之间的
通信板
如果要在没有 ROS 的嵌入式系统(OpenCR)上操作 OpenMANIPULATOR-X 请参阅
OpenCR 设置
连接
将微型-USB (连接到 PC)舵机(OpenMANIPULATOR-X)和 12V 电源连接到 OpenCR
如下所示
注请参阅 OpenCR 的详细说明
上传源代码
请参阅以下页面以安装 Arduino IDE 并在 Arduino IDE 环境中启用 OpenCR 控制板
使用 OpenCR 的 Arduino IDE
完成上述所有设置后打开 Arduino IDE 并打开 usb to dxl 示例源代码如下所示按照
Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl 的顺序设置
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
将 usb to dxl 实例源代码上传到 OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
上传完成后日志窗口中将显示以下注释
如果显示的注释与此不同请尝试再次上传有关详细信息请参阅 OpenCR
提示如果上传过程中出现 cmd_read_board_name fail 0xF020 错误请参考 OpenCR E-Manual 进入固
件恢复模式进入模式后再次上传源代码
6[ROS]控制器包 您可以使用专用的控制器程序控制 OpenMANIPULATOR-X 的每个关节并通过消息检
查 OpenMANIPULATOR-X 的状态
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
启动控制器
在启动控制器之前请检查 open_manipulator_controller 包中的 open_manipulator_controller
启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表以下参数设置控制环境
use_robot_name
dynamixel_usb_port
dynamixel_baud_rate
control_period
use_platform
use_moveit
planning_group_name
moveit_sample_duration
(1) use_robot_name 是设置操纵器名称(ROS 消息的命名空间)的参数
(2) dynamixel_usb_port 是设置 USB 端口以连接 OpenMANIPULATOR-X 的舵机的参数
如果您用的是 U2D2应该设置为devttyUSB如果您用 OpenCR 应该设置为
devttyACM ( 指示连接到舵机的端口号)
(3) dynamixel_baud_rate 是设置舵机波特率的参数OpenMANIPULATOR-X 中使用的舵
机的默认波特率为 1000000
(4) control_period 是设置舵机和电脑之间通信周期(控制循环时间)的参数
(5) use_platform 是设置是使用实际 OpenMANIPULATOR-X 还是 OpenMANIPULATOR-X
模拟的参数请参阅[ROS]模拟章节
(6) use_moveit planning_group_name 和 moveit_sample_duration 是加载 move_group 数据
包的参数请参阅 MoveIt章节
(7) 设置参数后启动 OpenMANIPULATOR-X 控制器开始[ROS]操作
(8) 请打开终端然后运行 roscore 和以下命令
(9) 运行完 roscore 之后打开另一个终端然后在终端中编写以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下面的图片显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩的情况下调整每个关节
(10) 处理成功后终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
提示
如果无法加载舵机请使用舵机工作台包中的以下命令检查舵机设置
rosrun dynamixel_workbench_controllers find_dynamixel devttyUSB0
如果找不到任何舵机请检查固件以使用 robotis 软件(R+ Manager 20 或
DYNAMIXEL Wizard 20)
如果您要更改舵机 ID请检查 open_manipulator_lib 文件夹中的 open_manipulatorcpp
关节默认 ID 是 11121314夹持器默认 ID 是 15
注意
OpenMANIPULATOR-X 控制器与协议 20 兼容协议 10 不支持同步读取指令同时访问多个舵机协议 20
支持 MX 20X 和 Pro 系列但不支持 AX RX 和 EX
检查设置
操纵器描述
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
输入以下消息以检查 OpenMANIPULATOR-X 设置
lt 操纵器描述 gt 将在终端上打印启动打开的操纵器控制器结果表明
OpenMANIPULATOR-X 的当前状态
这个参数在 open_manipulator_libs 数据包的 open_manipulatorcpp 有详细描述
~catkin_wssrcopen_manipulatoropen_manipulator_libssrcopen_manipulatorcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
注意
测试是在 Ubuntu 1604 上的 ROS Kinetic Kame 已完成
确保在执行这些说明之前安装了 ROS 必备项-安装 ROS 包
在 RViz 下载 OpenMANIPULATOR-X
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch
注意
如果在启动 OpenMANIPULATOR-X 控制器之前启动 OpenMANIPULATOR-X 控制器文件RVIZ
上的机器人模型将与实际的机器人同步
如果只是要检查 OpenMANIPULATOR-X 的模型而不控制实际的 OpenMANIPULATORr则可以
在不使用 OpenMANIPULATOR-X 控制器的情况下启动 RVIZ您可以通过 GUI 程序更改每个关节如果
用户通过执行以下命令仅启动 rviz
$ roslaunch open_manipulator_description open_manipulator_rvizlaunch use_gui=true
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
消息列表
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
在执行这些说明之前请确保安装了 ROS 必备项- 安装 ROS 软件包
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
OpenMANIPULATOR-X 控制器提供主题和服务消息来控制操纵器并检查操纵器的状态
主题
主题监控器
为了检查 OpenMANIPULATOR-X 控制器的主题可以使用 ROS 提供的 RQTRQT 是一个基于 qt 的框架
用于为 ROS 开发 GUI 程序RQT 允许用户通过在主题列表中显示所有主题轻松查看主题状态您可以
在 RQT 上看到主题名称类型带宽赫兹和数值
运行 RQT
提示如果 RQT 没有显示 请按 plugin -gt Topic Monitor -gt OpenMANIPULATOR 的顺序选择
没有复选标记的主题将不受监视要监视主题请单击下一个 checkbox
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果要查看有关主题消息的详细信息请单击每个 checkbox 旁边的按钮
发布的主题列表
发布的主题列表 open_manipulator_controller 发布的主题列表
open_manipulatorstates
open_manipulatorjoint_states
open_manipulatorgripperkinematics_pose
open_manipulatorjoint_name_positioncommand
open_manipulatorrvizmoveitupdate_start_state
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorjoint_states(sensor_msgsJointState) 表示OpenManipulator-X关节状态的消
息ldquonamerdquo表示关节组件名称ldquoeffortrdquo显示舵机关节的电流ldquopositionrdquo和ldquovelocityrdquo表示
关节的角度和角速度
open_manipulatorgripperkinematics_pose(open_manipulator_msgsKinematicsPose)指示任务
空间中的姿势(位置和方向)的消息ldquopositionrdquo表示末端效应器(工具)中心的 XY 和 Z
值ldquoOrientationrdquo表示末端效应器(工具)的方向为四元数
open_manipulatorstates(open_manipulator_msgsOpenManipulatorState) 指示
OpenMANIPULATOR 状态的消息
ldquoopen_manipulator_actuator_staterdquo 表示执行器(舵机)是启用(ldquo执行器启用rdquo)还是禁用
(ldquo执行器禁用rdquo)
ldquoopen_manipulator_moving_staterdquo状态表示 OpenMANIPULATOR-X 是沿轨迹移动(ldquo正在
移动rdquo)还是停止(ldquo停止rdquo)
open_manipulatorjoint_name_positioncommand(std_msgsFloat64) 是将各节点的目标位
置信息发布到露台模拟节点上 joint_name显示每个关节的名称只有在将 use_platform
参数设置为 false的情况下运行控制器包才会发布消息
rvizmoveitupdate_start_state(std_msgsEmpty) 是更新 moveit 的开始状态的消息弹道只
有在将 use_moveit 参数设置为 true的情况下运行控制器包才会发布此消息
订阅主题列表
订阅主题列表 open_manipulator_controller 订阅的主题列表
open_manipulatoroption
open_manipulatormove_groupdisplay_planned_path
open_manipulatormove_groupgoal
open_manipulatorexecute_trajectorygoal
注意 这些主题是检查机器人状态的消息不管机器人的运动状态如何
open_manipulatoroption(std_msgsString) 用于设置 OpenMANIPULATOR-X 选项
ldquoprint_open_manipulator_setting是请求打开的操纵器控制器显示 Manipulator
Descriptionrdquo
open_manipulatoroption(moveit_msgsDisplayTrajectory) 用于订阅从 moveit 发布的计划关
节轨迹
move_groupgoal(moveit_msgsMoveGroupActionGoal)用于订阅从 moveit 发布的计划选项数
据
move_groupexecute_trajectorygoal(moveit_msgsExecuteTrajectoryActionGoal) 用于订阅从
moveit 发布的轨迹执行状态
此外只要控制器中添加了主题就可以通过 RQT 监控主题
服务
服务器服务列表
注意这些服务是操作 OpenMANIPULATOR-X 或更改 OpenMANIPULATOR 的舵机状态的消息
服务器服务列表 open_manipulator_controller 服务器可提供的服务列表
open_manipulatorgoal_joint_space_path (open_manipulator_msgsSetJointPosition)用户可
以使用此服务在 joint space 中创建轨迹用户输入目标关节的角度和轨迹的总时间
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
open_manipulatorgoal_joint_space_path_to_kinematics_pose
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
态和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_position
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_joint_space_path_to_kinematics_orientation
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 joint space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_task_space_path (open_manipulator_msgsSetKinematicsPose)用户
可以使用此服务在 task space 中创建轨迹用户输入 OpenMANIPULATOR-X 末端执行
器(工具)在 task space 中的运动学姿态和轨迹的总时间
open_manipulatorgoal_task_space_path_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学姿
势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_orientation_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务在 task space 中创建轨
迹用户在 task space 中输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿
势(仅限方向)和轨迹的总时间
open_manipulatorgoal_joint_space_path_from_present
(open_manipulator_msgsSetJointPosition)
用户可以使用该服务从 joint space 的当前关节角度创建轨迹用户输入要更改的目标
关节的角度和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从任务空间的当前运动
学姿态创建轨迹用户输入要在 task space 中更改的 OpenMANIPULATOR-X 末端执行
器(工具)的运动学姿势和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_position_only
(open_manipulator_msgsSetKinematicsPose)用户可以使用此服务从 task space 的当前运
动学姿态创建轨迹用户输入 OpenManipulator-X 末端执行器(工具)在 task space 中
的运动学姿势(仅限位置)和轨迹的总时间
open_manipulatorgoal_task_space_path_from_present_orientation_only
(open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务从 task space 中的当前运动学姿势创建轨迹用户在 task space 中
输入 OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
open_manipulatorgoal_tool_control (open_manipulator_msgsSetJointPosition)
用户可以使用此服务移动 OpenMANIPULATOR 的工具
open_manipulatorset_actuator_state (open_manipulator_msgsSetActuatorState)用户可以
使用此服务控制执行器的状态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
如果用户在ldquo设置执行器rdquo状态下设置为ldquotrue rdquo则执行器将启用
如果用户在ldquo设置执行器rdquo状态下设置为ldquofalse rdquo则执行器将被禁用
open_manipulatorgoal_drawing_trajectory (open_manipulator_msgsSetDrawingTrajectory)
用户可以使用此服务创建绘图轨迹用户可以创建圆菱形心脏和直线轨迹
moveitget_joint_position (open_manipulator_msgsGetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务接收由 move_group 计算的关节位置
moveitget_kinematics_pose (open_manipulator_msgsGetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务接收由移动组计算的运动学姿势
moveitset_joint_position (open_manipulator_msgsSetJointPosition)
使用 moveit 时使用此服务用户可以使用此服务通过移动组在关节空间中创建轨迹
用户输入目标关节的角度和轨迹的总时间
moveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
使用 moveit 时使用此服务用户可以使用此服务通过 move_group 在 task space 中创建
轨迹用户输入 OpenMANIPULATOR-X 末端执行器(工具)在 task space 中的运动学
姿态和轨迹的总时间
7[ROS] 运行
GUI 程序 注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
在运行以下指令之前请确保运行 OpenMANIPULATOR-X 控制器指令
您可以使用 GUI 程序操作 OpenMANIPULATOR-X启动 open_manipulator_control_gui 节
点该程序显示 OpenMANIPULATOR-X 的状态并允许用户控制 OpenMANIPULATOR-X
要控制 OpenMANIPULATOR-X请首先单击 Timer Start 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
检查 OpenMANIPULATOR-X 的状态(关节状态运动学姿势)
在 joint space 中操纵 OpenManipulator-X输入轨迹的关节角度和总时间然后单击 send 按
钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
在 task space 中操纵 OpenMANIPULATOR-X在 task space中输入 OpenMANIPULATOR-X
末端效应器(工具)的运动学姿势和轨迹的总时间然后单击 send 按钮
要使用 OpenMANIPULATOR-X 创建绘制轨迹首先请选择绘制轨迹类型(line 直线circle
圆rhombus 菱形heart 心形)根据绘制轨迹类型和绘制轨迹的总时间输入参数然后单
击 send 按钮
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
远程操作
键盘
提示 终端可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
开始使用 open_manipulator_teleop_keyboard 节点进行简单的远程操作测试
$roslaunch open_manipulator_teleop open_manipulator_teleop_keyboardlaunch
如果节点成功启动终端窗口中将显示以下指令
PS4 操纵杆
使用 PS4 操纵杆安装远程操作包
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
使用以下命令通过蓝牙将 PS4 操纵杆连接到电脑
按住 PlayStation(播放站)按钮+Share(共享)按钮 10 秒进入与 PS4 的配对模式如果
PS4 上的灯变为蓝色请在终端和控制 OpenMANIPULATOR-X 中输入以下命令
XBOX 360 操纵杆
使用 XBOX 360 操纵杆安装远程操作包
使用无线适配器或 USB 电缆将 Xbox 360 操纵杆连接到 PC并启动 Xbox 360 操纵杆的远程
操作包
MoveIt
提示 终端应用程序可以通过屏幕左上角的 Ubuntu 搜索图标找到终端快捷键为 Ctrl+Alt+t
在您用 MoveIt 启动控制器之前请查看 open_manipulator_controller 数据包里的
open_manipulator_controller 启动文件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参数列表 以下参数可用于加载 move_group 包
use_moveit
planning_group_name
moveit_sample_duration
use_moveit 是设置是否使用 MoveIt 的参数
planning_group_name 是在 setup_assistant 设置的参数
moveit_sample_duration 是从 MoveIt计划关节轨迹时设置采样时间的参数
设置好这些参数之后启动 open_manipulator_pro_controller
警告 启动控制器时使用 MoveIt必须关闭 OpenMANIPULATOR-X 启动文件
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会停止操作
下图显示了 OpenMANIPULATOR-X 的理想姿势请在未启用舵机扭矩时调整每个关节以及下图
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
服务器服务列表 关于 MoveItopen_manipulator_controlle 服务器提供的服务列
表
open_manipulatormoveitget_joint_position (open_manipulator_msgsGetJointPosition)
用户可以使用此服务接收由 move_group 计算的联合位置
open_manipulatormoveitget_kinematics_pose
(open_manipulator_msgsGetKinematicsPose)用户可以使用此服务接收由 move_group 计
算的运动学姿势
open_manipulatormoveitset_joint_position (open_manipulator_msgsSetJointPosition)用
户可以使用此服务通过移动组在 joint space 中创建轨迹用户输入目标关节的角度和轨
迹的总时间
open_manipulatormoveitset_kinematics_pose (open_manipulator_msgsSetKinematicsPose)
用户可以使用此服务通过移动组在 task space 中创建轨迹用户在 task space 中输入
OpenMANIPULATOR-X 末端效应器(工具)的运动学姿势(仅限方向)和轨迹的
总时间
提示如果要设置 position_only的反向运动请选中ldquo打开rdquo操纵器ldquoopen_manipulator_moveit -gt config -gt
kinematicsyamlrdquo并将ldquoposition_only_ik rdquo设置为ldquoTruerdquo
8[ROS] 模拟
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
启动 gazebo
将 OpenManipulator-X 加载到 Gazebo 模拟器上然后单击ldquoPlay rdquo按钮
红色框指向末端效应器链接
点击 rostopic list 列出激活的主题
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开 OpenManipulator control GUI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
gazebo 控制器
启动 open_manipulator_controller 进行 gazebo 模拟
注意
要使用 OpenMANIPULATOR-X 控制器在 Gazebo 环境中控制
OpenMANIPULATOR-X控制器必须将 use_platform 参数设置为 false因为它需要向
Gazebo 而不是平台发送消息
如果您想操纵 OpenMANIPULATOR-X 在 Gazebo 模拟器内使用移动装置您也应
在 open_manipulator_controller 启动文件中将 use_moveit 转换为 true
如果用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器成功启动终端将显示以下消息
注意 在用于 Gazebo 模拟的 OpenMANIPULATOR-X 控制器中关节舵机和夹持器舵机未启用以下消息
将不显示
关节舵机 ID 11 型号 XM430-W350
关节舵机 ID 12 型号 XM430-W350
关节舵机 ID 13型号 XM430-W350
关节舵机 ID 14 型号 XM430-W350
夹持器舵机 l ID 15型号 XM430-W350
9[ROS] APP
摄像机 APP
注意
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
本说明应在安装的 PC ROS 包上运行请在安装的 PC ROS 软件包上运行以下说明
安装摄像机数据包
Astra Pro
概述
Astra 系列的设计是为了进一步改进将 Orbbec 3D 相机与市场上现有 3D 相机区分开来的属
性Astra 3D 相机提供计算机视觉可以实现许多功能如面部识别手势识别人体跟踪
三维测量环境感知和三维地图重建
参数说明
项目 参数说明
RGB 图像分辨率和帧速率 1280 x 720 30fps
深度图像分辨率和帧速率 640 x 480 30fps
FOV (视野) 60degH x 495degV x 73degD
范围 06m - 8m
USB 端口 USB 20
尺寸 165mm x 30mm x 40mm
运行系统 AndroidLinuxWindows 7810
SDK Astra SDK or OpenNI
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
项目 参数说明
麦克风 2 (Built - in)
安装
以下命令将安装相关的 Astra Pro 数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉菜单中选
择与 Astra Pro 相关的数据主题名称
参考
ORBBEC Astra Pro
Astra Pro ROS package
Realsense D435
概述
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Intelreg RealSensetrade Depth Camera D435 是一个由 USB 供电的深度照相机由一对深度传感
器RGB 传感器和红外投影仪组成对于生产者和开发者来说在原型开发中添加深度感
知能力是非常理想的
说明
项目 参数说明
使用环境 室内室外
RGB 传感器分辨率和帧速率 1920 x 1080 at 30 fps
RGB 传感器 FOV(视野) 694deg(H) x 425deg(V) x 77deg(D) (+- 3deg)
深度流量输出分辨率 高达 1280 x 720
深度流量输出帧速率 高达 90 fps
深度视野(FOV) 852deg(H) x 58deg(V) x 94deg(D) (+- 3deg)
最小深度距离 (Min-Z) 02m
最大范围 趋近于 10 米
尺寸 90 mm x 25 mm x 25 mm
连接器 USB 30 Type - C
安装
以下命令将会安装 Intelreg RealSensetrade Depth Camera D435 相关的数据库
执行
运行如下命令
您可以使用 RViz 或 image_view 来验证驱动程序您可以从应用程序顶部的下拉
菜单中选择与 IntelregRealsensetradeDepth Camera D435 相关的数据主题名称
参考
Intelreg RealSensetrade Depth Camera D435
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense ROS package
Raspberry Pi Camera V2
概述
详情请参阅 Raspberry Pi Camera V2 介绍
说明
详情请参阅 Raspberry Pi Camera V2 说明
安装
警告
在设置 Raspberry Pi Camera V2 之前必须安装 Raspberry pi
请查看这个链接 Raspberry Pi 3 Setup
[Raspberry Pi] 设置摄像机的硬件
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
选择 3 Interfacing Options
选择 P1 Camera
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
启用摄像机接口
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
重新启动 Raspberry PI 后要测试系统是否已安装并正常工作请尝试以下命令
显示屏应显示相机的 5 秒钟预览然后拍照保存到 testjpg 文件中
以下命令将在您的 ROS 系统上安装相关的 Raspberry PI 摄像头数据包
执行
警告
在您远程电脑运行 rqt_image_view 之前请检查您的 Raspberry Pi and 远程电脑是否已连接请查看以下链
接
Raspberry Pi 3 Setup
Remote PC Setup
[远程电脑] 运行如下命令
[Raspberry Pi] 运行如下命令
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
参考
Raspberry Pi Camera
Getting Started
Pi Camera ROS package
安装 AR Marker 包
注意
以下操作说明已经在 Ubuntu 1604 和 ROS Kinetic Kame 测试过
open_manipulator_perceptions 数据包需要 ar_track_alvar 数据包
确保在运行以下指令之前运行 Openmanipulator controller 指令
下载 AR Marker
如果使用 ar_track_alvar 包识别 AR 标记请在此处打印出 AR Marker
安装
注意
要使用 Raspberry PI 相机 v2请将其安装在远程电脑上
执行
您必须根据摄像机的类型更改参数运行以下命令
Astra Pro
注意
必须安装 Astra Pro ROS package
Realsense D435
注意
必须安装 Realsense D435 ROS package
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
[Raspberry Pi]
注意
必须安装 Raspberry Pi Camera V2 ROS package
[远程 PC]
RViz
当相机识别出 AR 标记时AR 标记的姿态显示在 RVIZ 上
选取和放置示例
在本例中OpenMANIPULATOR-X 使用 Raspberry PI Camera V2 选取和放置块
使用 3D 打印机将相机帧打印到 OpenMANIPULATOR-X 以安装相机将
3cm3cm AR 标记连接到立方体块上当运行示例包时您按顺序选择 AR 标记
的 ID 12 和 3并将它们堆叠在一边
摄像机框架
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Raspberry Pi Camera V2
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Realsense D435
下载以下路径 stl 文件并输出到 3D 打印机
OnShape
Thingiverse
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装 ROS package
注意
以下说明已在 Ubuntu 1604 和 ROS Kinetic Kame测试
确保在运行以下指令之前运行 OpenManipulator controller 指令
先安装 Camera Package再安装 AR Marker Package
注意
为了使用 Raspberry Pi Camera V2 请将其安装在远程电脑上
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行 Roscore 后运行 OpenManipulator 的控制器打开另一个终端窗口在终
端中输入以下命令
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
如果 OpenManipulator 控制器已成功启动终端将显示以下消息
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
打开另一个终端窗口在终端中输入以下命令此命令用于执行识别 AR 标记的数据包输
入您使用的相机类型和 AR 标记的大小在这个例子中我们使用一个 Raspberry Pi Camera
V2 和 3cm ar marker
注意 要使用 Raspberry Pi Camera V2请在 Raspberry PI 中运行相机节点
打开另一个终端窗口在终端中输入以下命令
因 此 您 可 以 在 终 端 窗 口 中 看 到 以 下 消 息 你 可 以 检 查 机 器 人 的 状 态
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
有三个命令请在终端中输入该号码
1 Home pose Move to the home pose
2 Pick and Place demo Start Start the Pick and Place demonstration
3 Pick and Place demo Stop Stop the Pick and Place demonstration
主从配置
在本例中如果用户持有主 OpenManipulator则 OpenManipulator-X 附属机器人会像主机器
人一样移动录制模式允许您在移动主 OpenManipulator-X 并将其播放回 OpenManipulator
附属机器人时保存轨迹
OpenManipulator-X 设置
如果您需要在一台 PC 上控制两个 OpenManipulator请使用两个 U2D2 和两个
OpenManipulator 进行连接如下所示
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Master OpenManipulator
Master OpenManipulator-X 是一个由用户控制的机器人很容易移动因为舵机没有应用扭
矩Master OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps
名称 舵机 ID
Joint 1 1
Joint 2 2
Joint 3 3
Joint 4 4
Gripper 5
Slave OpenManipulator
Slave OpenManipulator-X 与 Master OpenManipulator 同步移动Slave
OpenManipulator-X 的舵机将 ID 设置为以下值波特率设置为 1000000bps这
与默认的 OpenManipulator-X 设置相同
名称 舵机 ID
Joint 1 11
Joint 2 12
Joint 3 13
Joint 4 14
Gripper 15
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
安装程序包
在终端窗口运行以下命令
如果 catkin_make 命令已完成且没有任何错误则所有准备工作都已完成
执行示例
请打开终端窗口按如下命令运行 roscore
运行完 roscore 后运行 slave OpenManipulator 的控制器打开另一个终端窗口
在终端中输入以下命令
dynamixel_usb_port 是将使用端口设置为与 slave OpenManipulator 的舵机连接的参数
它应该设置为devttyUSB它不同于 master OpenManipulator 的使用端口
警告
请在运行 OpenMANIPULATOR-X 之前检查每个关节位置如果关节位置超出范围可能会
停止操作
下面的图片显示了 OpenManipulator-X 的理想姿势请在未启用舵机扭矩的情况下调整每个
关节以及下面的图片
If the master OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
And Open the other terminal window and enter the following command in the
terminal This command is to run the controller of master OpenManipulator
usb_port is a parameter to set use port to connected with Dynamixel of master
OpenManipulator It should be set devttyUSB and it is different from use port of
slave OpenManipulator
If the slave OpenManipulator-X controller has been launched successfully the
terminal will show the following message
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
So you can see the following message in the terminal window You can check the
current control mode and robot status(joint angle tool position)
There are four control modes Please enter that number in the terminal
1 Master-Slave Mode Master robot and slave robot move synchronously
2 Start Recording Trajectory Master robot and slave robot move synchronously
and the controller records the moving trajectory
3 Stop Recording Trajectory Ends the recording
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
4 Play Recorded Trajectory The trajectory recorded in the 2nd mode is
reproduced only by the slave robot
10[ROS 2] Setup NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
WARNING If you would like to control OpenMANIPULATOR-X on OpenCR (Embedded board) instead of
using ROS please set it up as described in OpenCR Setup
Install Ubuntu on PC
Download and install Ubuntu 1804 on your PC Tutoral guide will be helpful for you to
install Ubuntu Desktop
Download Ubuntu
Tutorial - Install Ubuntu Desktop
Install ROS 2 on PC
As OpenMANIPULATOR-PRO operates on Ronbot Operating System(ROS) it
requies to intall ROS 2 Dashing Diademata The following script will allow you to simplify the
ROS 2 installation procedure Run the following commands in a terminal window
After installing ROS 2 please reboot PC
NOTE The terminal application can be found with the Ubuntu search icon on the top left corner of the screen
Shortcut key for terminal is Ctrl+Alt+ t
NOTE In order to check which packages are installed please check this link out install_ros_dashingsh
If you prefer a manual installationfollowing link guides you how to install ROS 2 on
your PC
Manual Installation of ROS 2 Dashing Diademata
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Install ROS 2 Packages
Install dependent packages for OpenMANIPULATOR-X Run the following
commands in a terminal window
Communication Converter
U2D2
Connection
Connect micro USB (connected to PC) DYNAMIXELrsquos(OpenMANIPULATOR-X)
and 12V Power to U2D2 and U2D2 power hub board as shown below
NOTE Please refer to U2D2 e-Manual and U2D2 power hub board e-manual for detailed connection of U2D2
and U2D2 power hub board
USB Latency Timer Setting
In Linux(Ubuntu platform) environment USB latency time is set to 16ms by default
Follow the steps below to set the communication latency time to the lowest value
(1ms) between DYNAMIXELrsquos and PC connected via USB
Open a terminal window and run the following command to set usb latency time
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP This entered command set USB latency timer to 1 ms If you would like to see the setting run the following
command in a terminal
cat sysbususb-serialdevicesttyUSB0latency_timer
OpenCR
This section explains how to set up OpenCR as a communication board between ROS
Packages of PC and DYNAMIXELrsquos of OpenMANIPULATOR-X
If you want to operate OpenMANIPULATOR-X on embedded system (OpenCR)
without ROS please refer OpenCR Setup
Connection
Connect micro USB (connected to PC) Dynamixelrsquos(OpenMANIPULATOR-X) and
12V Power to OpenCR as shown below
NOTE Please refer to the detailed description of OpenCR
Upload Source code
Please refer to the following pages to install the Arduino IDE and enable the OpenCR
board in the Arduino IDE environment
Arduino IDE for using OpenCR
After completing all the above settings open the Arduino IDE and open usb to dxl
example source code as shown below Go to Examples rarr OpenCR rarr 10Etc rarr usb_to_dxl on
Arduino IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the usb to dxl example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
If it is shown different comments than this try uploading again Refer to the OpenCR
for details
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-manual to enter the firmware recovery mode and upload the source code again after entering mode
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
11[ROS 2] Controller Package OpenMANIPULATOR-X controller provides basic manipulation of
OpenMANIPULATOR-X You can control DYNAMIXELrsquos of
OpenMANIPULATOR-X and check states of OpenMANIPULATOR-X through
messages of the controller
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Launch Controller
Please open a terminal then run the following command in the terminal
WARNING
Please check each joint position before running OpenMANIPULATOR-X If joints are set
inappropriately OpenMANIPULATOR-X might not start operating The picture of
OpenMANIPULATOR-X below is showing you the ideal pose of OpenMANIPULATOR-X
Please adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot
enabled
Follwing message will be shown in the Terminal after the process done successfully
TIP
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you canrsquot load DYNAMIXEL please check firmware to use ROBOTIS software (R+ Manager 20 or
DYNAMIXEL Wizard 20)
If you would like to change Dynamixel ID please check open_manipulator_xcpp in the
open_manipulator_lib folder The default ID is 11 12 13 14 for joints and 15 for the gripper
NOTE OpenMANIPULATOR-X controller is compatible with Protocol 20 which supports MX 20 X and Pro
series Protocol 10 does not support SyncRead instructions to access to multiple DYNAMIXELrsquos
simultaneously
Check Setting
Manipulator Description
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run the OpenMANIPULATOR-X controller instructions before running the instructions
below
Publish a topic message to check the OpenMANIPULATOR-X setting
ltManipulator Descriptiongt will be printed on a terminal Launch the
open_manipulator_controller It is shown that present states of the
OpenMANIPULATOR-X
This parameter is descripted on open_manipulator_xcpp in open_manipulator_x_libs
package
~robotis_wssrcopen_manipulator_xopen_manipulator_x_libssrcopen_manipulator_xcpp
----------ltManipulator Descriptiongt----------
ltDegree of freedomgt
4000
ltSize of Componentsgt
5000
ltConfiguration of worldgt
[Name]
-World Name world
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Child Name joint1
[Static Pose]
-Position
(0000 0000 0000)
-Orientation
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
[Dynamic Pose]
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of grippergt
[Component Type]
Tool
[Name]
-Parent Name joint4
[Actuator]
-Actuator Name tool_dxl
-ID 15
-Joint Axis
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
-Coefficient -0015
-Limit
Maximum 0010 Minimum -0010
[Actuator Value]
-Value 0008
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0130 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0015)
-Orientation
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint1gt
[Component Type]
Active Joint
[Name]
-Parent Name world
-Child Name 1 joint2
[Actuator]
-Actuator Name joint_dxl
-ID 11
-Joint Axis
(0000 0000 1000)
-Coefficient 1000
-Limit
Maximum 3142 Minimum -3142
[Actuator Value]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Value -0043
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0012 0000 0017)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0017)
-Orientation
(0999 0043 0000
-0043 0999 0000
0000 0000 1000)
-Linear Velocity
(0000 0000 0000)
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint2gt
[Component Type]
Active Joint
[Name]
-Parent Name joint1
-Child Name 1 joint3
[Actuator]
-Actuator Name joint_dxl
-ID 12
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1571 Minimum -2050
[Actuator Value]
-Value -0052
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
-Relative Position from parent component
(0000 0000 0058)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0012 0000 0075)
-Orientation
(0998 0043 -0052
-0043 0999 0002
0052 0000 0999)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
(0000 0000 0000)
ltConfiguration of joint3gt
[Component Type]
Active Joint
[Name]
-Parent Name joint2
-Child Name 1 joint4
[Actuator]
-Actuator Name joint_dxl
-ID 13
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 1530 Minimum -1571
[Actuator Value]
-Value 0546
-Velocity 0000
-Acceleration 0000
-Effort 0000
[Constant]
-Relative Position from parent component
(0024 0000 0128)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0029 -0001 0204)
-Orientation
(0880 0043 0474
-0038 0999 -0020
-0474 0000 0880)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
ltConfiguration of joint4gt
[Component Type]
Active Joint
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
[Name]
-Parent Name joint3
-Child Name 1 gripper
[Actuator]
-Actuator Name joint_dxl
-ID 14
-Joint Axis
(0000 1000 0000)
-Coefficient 1000
-Limit
Maximum 2000 Minimum -1800
[Actuator Value]
-Value 1083
-Velocity 0000
-Acceleration 0000
-Effort -2690
[Constant]
-Relative Position from parent component
(0124 0000 0000)
-Relative Orientation from parent component
(1000 0000 0000
0000 1000 0000
0000 0000 1000)
-Mass 0000
-Inertia Tensor
(1000 0000 0000
0000 1000 0000
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
0000 0000 1000)
-Center of Mass
(0000 0000 0000)
[Variable]
-Position
(0138 -0005 0145)
-Orientation
(-0006 0043 0999
0000 0999 -0043
-1000 0000 -0006)
-Linear Velocity
(0000 0000 0000)
-Linear acceleration
(0000 0000 0000)
-Angular Velocity
(0000 0000 0000)
-Angular acceleration
(0000 0000 0000)
---------------------------------------------
RViz
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Load OpenMANIPULATOR-X on RViz
$ ros2 launch open_manipulator_x_description open_manipulator_x_rviz2launchpy
NOTE
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
If you launched the OpenMANIPULATOR-X controller before launching the
open_manipulator_controller file the robot model on RViz would be synchronized with the actual robot
If you would like to check only model of OpenMANIPULATOR-X without control the actual
OpenMANIPULATOR the user can launch the RViz without the OpenMANIPULATOR-X controller The user
can change each joint by GUI if the user launch only RViz by executing the following command $ ros2 launch
open_manipulator_x_description open_manipulator_x_rvizlaunchpy use_gui=true
Message List
Message List for ROS 2 Dashing Diademata will be released soon
Edit on GitHub
12[ROS 2] Operation
GUI Program
GUI Program for ROS 2 Dashing Diademata will be released soon
Teleoperation
NOTE
The test is done on ROS 2 Dashing Diademata installed in Ubuntu 1804
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Make sure ROS dependencies are installed before performing these instructions - Install ROS 2
Packages
Make sure to run OpenMANIPULATOR controller instructions before running the instructions below
Keyboard
TIP Terminal can be found with the Ubuntu search icon on the top left corner of the screen Shortcut key for
Terminal is Ctrl+Alt+ t
Launch open_manipulator_x_teleop_keyboard node for simple teleoperation test using the
keyboard
If the node is successfully launched the following instruction will appear in the
terminal window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
PS4 Joystick
Install packages for teleoperation using PS4 joystick
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share
button for 10 sec If the light on PS4 turns blue enter the following commands in
terminal and control OpenMANIPULATOR-X
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick
Connect XBOX 360 joystick to the PC with wireless adapter or USB cable and
launch teleoperation packages for XBOX 360 joystick
$ ros2 run joy joy_node
$ ros2 run open_manipulator_x_teleop open_manipulator_x_teleop_joystick
MoveIt
Move it for ROS 2 Dashing Diademata will be released soon
13[ROS 2] Simulation [ROS 2] Simulation for ROS 2 Dashing Diademata will be released soon
14[ROS 2] Applications [ROS 2] Applications for ROS 2 Dashing Diademata will be released soon
15[OpenCR] Setup WARNING This instruction does not use ROS to operate OpenMANIPULATOR-X
The way OpenMANIPULATOR-X is controlled by OpenCR (embedded system) and ROS is completely
different
When operating with ROS the PC becomes a main controller
On the other hands when operating with OpenCR the OpenCR becomes a main controller
OpenMANIPULATOR-X is compatible with OpenCR We offer API to easily
control manipulator This API supports Dynamixel Dynamixel X including protocol
10 and 20 Furthermore this code can be used for Friends of OpenMANIPULATOR
User can make thier code in Arduino IDE and simulate or control using Processing
GUI
Connection
Connect micro USB (connected to PC) Dynamixel(OpenMANIPULATOR) and 12V
Power to OpenCR as shown below
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
NOTE Please refer the detailed description of OpenCR
Edit on GitHub
16[OpenCR] Operation
Upload Controller Program
Find example source codes
Go to Examples gt OpenManipulator gt example gt Chain gt open_manipulator_chain on Arduino IDE for
OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Upload the example source to OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
When the upload is completed the following comments are displayed in the log
window
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation
because of joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please
adjust each joints along with the following picture when DYNAMIXEL torque isnrsquot enabled
WARNING Please refer to below default DYNAMIXEL configuration for OpenMANIPULATOR-X chain if
you have a custom manipulator
Joint ID Baudrate
1 11 1 Mbps
2 12 1 Mbps
3 13 1 Mbps
4 14 1 Mbps
Gripper 15 1 Mbps
TIP If an error of cmd_read_board_name fail 0xF020 occurs constantly during upload please refer to OpenCR
e-Manual to enter the firmware recovery mode and upload the source code again after entering mode
Setup Processing(GUI)
1
Download Processing from blow link and install
2
1 Download Processing httpsprocessingorgdownload
3
Launch Processing and go to Tools gt Add Tool
4
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Search for ControlP5 and install it
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Download processing source code for OpenMANIPULATOR
Launch Processing(GUI)
WARNING OpenCR10 must be connected to OpenMANIPULATOR-X before launching Processing Press
Reset Button of OpenCR10 to enable torque for OpenMANIPULATOR-X
Connect USB cable and power supply to OpenCR10
Turn on the OpenCR10 switch
Press Reset Button of OpenCR10 and check DYNAMIXELs of
OpenMANIPULATOR-X are torque enabled
Search downloaded processing file from Folder where you downloaded the source
code gt open_manipulator_processing gt Chain gt Chainpde and open it on Processing IDE
NOTE Upload OpenCR OpenMANIPULATOR example to OpenCR before running Processing example
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Run the processing source code and the following graphical GUI will be displayed
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Tip If the processing console displays an error message and the GUI does not run normally check the following
Check if ControlP5 is properly installed
Check if the graphics driver is installed properly
Check if the Java library is properly installed
If you have checked the above and it does not work normally I recommend running it in a different OS
environment (Windows mac linux)
Control Interface
NOTE Upload OpenCR example source code to OpenCR before run processing source code
The user can use processing program to manipulate the OpenMANIPULATOR
To manipulate the OpenMANIPULATOR click the toggle button to CONTROLLER ON
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The user can manipulate the OpenMANIPULATOR-X in the joint space Set the
joint angles Then click the SEND JOINT ANGLE button And set the gripper parameter
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Then click the SET GRIPPER button
The user can manipulate the OpenMANIPULATOR-X in the task space Click the
TASK SPACE CONTROL button to change the tab Click the desired direction button to
manipulate the OpenMANIPULATOR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Hand Guiding
The user can make the demonstration using hand guiding function
1 Click the HAND GUIDING button to change the tab
2 Holds the OpenMANIPULATOR-X by hand and click the toggle button to
TORQUE OFF
3 Move the OpenMANIPULATOR-X to the desired pose by hand
4 Click the SAVE JOINT POSE to save the present pose
5 Repeat step 3 and 4 to create the demonstration
6 Click the toggle button to TORQUE ON
7 Click the MOTION START button to start the saved poses
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration
The total time of the trajectory between saved poses is the same as 2 seconds
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Teleoperation RC100
The settings for ROBOTIS RC-100B controller is included in the OpenCR firmware
for OpenMANIPULATOR This controller can be used with the Bluetooth module
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
BT410
17Tool Modification
Vacuum Gripper
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a vacuum gripper
You can download the STL file of the vacuum gripper from the link in the table below
and print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Set vacuum gripper system referring Instrucables page
Part List
Part Name Quantity Link
3D Printed
Tool Part Vacuum Holder 1
Download
Link
Vacuum
System ARDUINO 4 RELAYS SHIELD 1 shop Link
12V Air Pump Motor 1 shop Link
UD0640-20-C (Air Tube 6Oslash) 1 shop Link
UD0860-20-C (Air Tube 8Oslash) 1 shop Link
MSCNL6-1 (Coupling 6Oslash) 1 shop Link
MSCNL8-1 (Coupling 8Oslash) 2 shop Link
MVPKE8 (Suction Cup) 1 shop Link
MHE3-M1H-32G-18 (Control Valve) 1 shop Link
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part Name Quantity Link
NEBV-Z4WA2L-P-E-25-N-LE2-S1
(Cable for Valve) 1 shop Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_vacuum on Arduino
IDE for OpenCR
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
Pen Holder
Hardware Setup
Remove normal gripper of OpenMANIPULATOR-X and install a pen holder You
can download the STL file of the pen holder from the link in the table below and
print it to the 3D printer
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
Part List
Part Name Quantity Link
3D Printed Tool Part Pen Holder 1 Download Link
Software Setup
Please refer the detailed description of [OpenCR] Setup
Download Arduino IDE and load OpenCR board on it
Arduino IDE for using OpenCR
Find example source codes
Go to Examples rarr OpenManipulator rarr example rarr Chain rarr open_manipulator_chain_pen on Arduino
IDE for OpenCR
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
WARNING
Please check each joint position before running OpenMANIPULATOR-X It might stop operation because of
joint position out of range
The picture on the below is showing you the ideal pose of OpenMANIPULATOR-X Please adjust each joints
along with the following picture when DYNAMIXEL torque isnrsquot enabled
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
18Mobile Manipulation
TIP You can get a more information about it in Manipulation section of TurtleBot3
Install dependent packages
Load a TurtleBot3 Waffle or Waffle Pi with OpenMANIPULATOR-X on RViz
TIP TB3_MODEL = waffle waffle_pi
北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3

北京智能佳科技有限公司
地址北京市亦庄经济开发区凉水河二街 8号大族企业湾 7号楼 A座 2层 邮编100176
网址wwwbjrobotcom 邮箱znjbjrobotcom 全国服务热线400 099 1872
TIP You can get a more information about it in Manipulation section of TurtleBot3