共通評価基準 · Web view基本評価項目 愛媛県福祉サービス第三者評価基準 「評価の着眼点、評価基準の考え方と評価の留意点」 【老人保健施設版】

1 ページ
日付:2020/08/03 報告者:岡本泰夫
RSI-ECAT 動作確認報告書: 山洋電気: SANMOTION シリーズ[RS3A03A2HA4]
Sanyo EtherCAT Slave : SANMOTION シリーズ[RS3A03A2HA4]
RSI-ECAT-Master 動作確認報告書-[KB7190]
1. 動作結果
RSI-ECAT において、山洋電気社製 EtherCAT Slave : RS3A03A2HA4 は 正常動作すると判定しました。
2. 動作評価項目一覧 および 動作結果 表
動作結果 動作評価内容 および 評価レポート
<評価項目1> コンフィグレーションツールによるスレーブ検出/設定
結果 評価項目
ESI ファイルの存在
ESI ファイル【無し】コンフィグレーション ( 要因:機能未実装)
ESI ファイル【有り】コンフィグレーション
評価項目の内、ESI ファイル【無し】コンフィグレーション判定は[未実装 ]でしたが、コンフィグレーション時は ESI ファイルを準備するこ
とが一般的であるため、動作結果を 動作可能: と判定しました。ESI ファイル【無し】コンフィグレーションを 未実装 : と判断した点
は、スレーブ検出時に DC スレーブとして認識せず、接続するモジュールの検出が行えなかったためです。
<評価項目2> ESM 操作/動作
結果 評価項目
Init -> Operational 遷移
Operational からのエラー動作確認(Safe-Operational への自動遷移)
LAN ケーブルの断線によって確認しました。確認時 LAN ケーブルを再接続した際 Operaional へ復帰する挙動が見られました。
評価項目全てにおいて正常に動作した為、動作可能: と判定しました。
<評価項目3> Mailbox 通信での読み書き (※ Mailbox 通信サポート時のみ)
結果 評価項目
CoE:Object Dictionaryへのアクセス
0x10F3 診断履歴 読み込み ( 要因: 0x10F3 未実装の為)
0x10F3 は実装されていない為、非対応: と判定しましたが、他の CoE オブジェクトへのアクセスは可能であったため、動作可能:
と判定しました。(0x10F3は EtherCAT Plug Festでのチェック項目にあるため本評価項目でアクセスしています。)
<評価項目4> Process Data 通信による入出力
結果 評価項目
Process Image 操作による出力動作確認
Process Image 操作による入力動作確認
評価項目全てにおいて正常に動作した為、動作可能: と判定しました。
<評価項目5>その他スレーブ I/F
結果 評価項目
Device Identification (Alias) 読み書き
サポート状況 項目名
Configured station alias
Requesting ID ( 要因:非対応の為)
上記項目の内、どちらかをサポートしていれば機能的に利用可能であるため、 動作可能 : と判定しました。
Register (Memory) 読み込み
サポート済み: 、非対応:
適合: 、不適合: 、未実装:

2 ページ
日付:2020/08/03 報告者:岡本泰夫
RSI-ECAT 動作確認報告書: 山洋電気: SANMOTION シリーズ[RS3A03A2HA4]
EEPROM/SII 読み書き
評価項目全てにおいて正常に動作した為、動作可能: と判定しました。
※評価項目の内、Device Identification の Requesting ID については、RSI-ECATではサポートしていません。
<評価項目 6> サンプルプログラムによる動作確認
結果 評価項目
1. スレーブとして認識でき、アタッチできること
⇒サーボアンプに対して、回線オープン処理が成功し、サーボアンプの検出も成功したため、正常と判断しました。
2. CoEの Mailbox が利用でき、設定が変更できること
⇒設定項目を読み込んだ時、変更結果が反映されていたため、正常と判断しました。
3. INIT から Operationalへ遷移できること
⇒マスターおよびスレーブが、Operational へ移行されたため、正常と判断しました。
4. スレーブの初期化ができること
① マスターステートおよびスレーブステートが Operational 状態から、サーボドライバ状態の遷移指令を要求しました。
② 初期化完了状態から主回路電源 OFF状態に遷移要求をしました。
要求前状態 遷移要求コード 要求後状態 結果
初期化完了(50h) Controlword : 6h 主回路電源 OFF(31h) ○
③ 主回路電源 OFF状態からサーボレディ状態に遷移要求をしました。
要求前状態 遷移要求コード 要求後状態 結果
主回路電源 OFF(31h) Controlword : 7h サーボレディ(33h) ○
④ サーボレディ状態からサーボ ON 状態に遷移要求をしました。
要求前状態 遷移要求コード 要求後状態 結果
サーボレディ(33h) Controlword : Fh サーボ ON(37h) ○
⑤ サーボ ON 状態からサーボレディ状態に遷移要求をしました。
要求前状態 遷移要求コード 要求後状態 結果
サーボ ON(37h) Controlword : 7h サーボレディ(33h) ○
⑥ サーボレディ状態から主回路電源 OFF状態に遷移要求をしました。
要求前状態 遷移要求コード 要求後状態 結果
サーボレディ(33h) Controlword : 6h 主回路電源 OFF(31h) ○
⑦ 主回路電源 OFF状態から初期化完了状態に遷移要求をしました。
要求前状態 遷移要求コード 要求後状態 結果
主回路電源 OFF(31h) Controlword : 0h 初期化完了(50h) ○
⇒サーボ ON状態まで遷移できトルクがかかっていることを確認し、その後、初期化完了状態に
戻る事も成功した為、正常と判断しました。
5. モータの正転回転ができること
⇒正転回転し、PDI : Position Actual Value 値も近似値内の為、正常と判断しました。
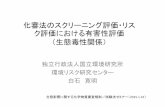
< サーボドライバ状態の遷移 >
②
③
④
初期化完了状態
主回路電源 OFF 状態
サーボレディ状態
サーボ ON 状態
⑤
⑥
⑦
①

3 ページ
日付:2020/08/03 報告者:岡本泰夫
RSI-ECAT 動作確認報告書: 山洋電気: SANMOTION シリーズ[RS3A03A2HA4]
6. モータの逆転回転ができること
⇒逆転回転し、PDI : Position Actual Value 値も近似値内の為、正常と判断しました。
評価項目全てにおいて正常に動作した為、動作可能: と判定しました。
<評価項目 7> モーションライブラリによるスレーブ制御
結果 評価項目
1. スレーブの初期化ができること
⇒サーボアンプに対して、回線オープン処理、サーボ ON 状態に遷移処理が成功したため、正常と判断しました。
2. モータの正転回転ができること
⇒正転回転し、モーションライブラリが完了応答を返却したため、正常と判断しました。
3. モータの逆転回転ができること
⇒逆転回転し、モーションライブラリが完了応答を返却したため、正常と判断しました。
評価項目全てにおいて正常に動作した為、動作可能: と判定しました。

4 ページ
日付:2020/08/03 報告者:岡本泰夫
RSI-ECAT 動作確認報告書: 山洋電気: SANMOTION シリーズ[RS3A03A2HA4]
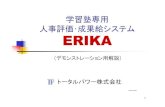
3. 使用ハードウェア情報
機器構成図
評価に使用した PC 情報
CPU Intel Core i5-9400F 2.9GHz
Memory 16GByte / 内 INtime® 160MByte
HDD 2TByte
Network Intel® PRO/1000 PT Dual Port Server Adapter
接続ケーブル LAN ケーブル(Cat.5e)
評価対象スレーブ情報
スレーブ型名/型番 スレーブ内容
サーボアンプ
RS3A03A2HA4
山洋電気 ACサーボアンプ SANMOTION シリーズ
Vendor name Sanyodenki Co., Ltd.
VendorID 441 (0x01b9)
ProductCode 11 (0x000b)
RevisionNo 1 (0x0001)
Hardware version※1 H003
Software version※2 31.2.00
Slave Type モーションスレーブ
Mailbox 通信 サポート
EoE
CoE
FoE
SoE
VoE
同期モード サポート※3 FreeRun
SM-Sync
サポート済み: 、非対応:
AC200V(単相)
評価用 PC
山洋電気 AC Servo Driver RS3A03A2HA4
山洋電気 AC Servo Motor R2AA08075FXRA0M

5 ページ
日付:2020/08/03 報告者:岡本泰夫
RSI-ECAT 動作確認報告書: 山洋電気: SANMOTION シリーズ[RS3A03A2HA4]
DC (DC SYNC0/DC SYNC1 をサポート)
Cyclic command: LRW サポート※4
設定可能サイクルタイム※5 62.5usec,125usec, 250usec, 500usec,
1msec, 2msec, 4msec, 8msec, 16msec
制御モード
サポート※6
Profile position mode(pp)
Velocity mode(vl)
Profile velocity mode(pv)
Torque profile mode(tq)
Homing mode(hm)
Interplated position mode(ip)
Cyclic syncronous position mode (csp)
Cyclic syncronous velocity mode (csv)
Cyclic syncronous torque mode (cst)
※1 CoE オブジェクト 0x1009 に定義されています。
※2 CoE オブジェクト 0x100A に定義されています。
※3 CoE オブジェクト 0x13C2:04 に定義されています。
※4 ECS レジスタ 0x08-0x09 :bit9 に定義されています。
※5 CoE オブジェクト 0x13C2:02 設定可能値を指します。
※6 CoE オブジェクト 0x6502 に定義されています。
サーボモータ
R2AA08075FXRA0M
山洋電気 ACサーボモータ SANMOTION シリーズ
分解能 131072
エンコーダ バッテリレスアブソリュートエンコーダ
4. 使用ソフトウェア情報
OS Microsoft Windows 10 Pro
RT-OS INtime® 6.3.19040.2
Master RSI-ECAT-Master/DC 3.03
Configurator RSI-ECAT-Studio 1.12.349.0
Motion Library RTPL-EC 0.2.42
動作評価アプリケーション CiA402Sample.rta 通信周期 1000μs
5. プロセスイメージ情報
プロセスイメージ入力情報: 34Bytes
Name PI Offset(Bit) Bit Size Data Type
Slave 1 (SanyoDenki RS3 EtherCAT).Inputs.Status word 0x0 16 UINT
Slave 1 (SanyoDenki RS3 EtherCAT).Inputs.Status word 1 0x10 16 UINT
Slave 1 (SanyoDenki RS3 EtherCAT).Inputs.Position actual value 0x20 32 DINT
Slave 1 (SanyoDenki RS3 EtherCAT).Inputs.Velocity actual value 0x40 32 DINT
Slave 1 (SanyoDenki RS3 EtherCAT).Inputs.Torque actual value 0x60 16 INT
Slave 1 (SanyoDenki RS3 EtherCAT).Inputs.Following error actualvalue 0x70 32 DINT
Slave 1 (SanyoDenki RS3 EtherCAT).Inputs.Touch probe status 0x90 16 UINT
Slave 1 (SanyoDenki RS3 EtherCAT).Inputs.Touch probe position 1 positive value 0xA0 32 DINT
Slave 1 (SanyoDenki RS3 EtherCAT).Inputs.Touch probe position 1 negative value 0xC0 32 DINT
Slave 1 (SanyoDenki RS3 EtherCAT).Inputs.Digital input 0xE0 32 DINT
Slave 1 (SanyoDenki RS3 EtherCAT).Inputs.Error register 0x100 8 USINT

6 ページ
日付:2020/08/03 報告者:岡本泰夫
RSI-ECAT 動作確認報告書: 山洋電気: SANMOTION シリーズ[RS3A03A2HA4]
Slave 1 (SanyoDenki RS3 EtherCAT).Inputs.Modes of operation display 0x108 8 SINT
プロセスイメージ出力情報: 28Bytes
Name PI Offset(Bit) Bit Size Data Type
Slave 1 (SanyoDenki RS3 EtherCAT).Outputs.Control word 0x00 16 UINT
Slave 1 (SanyoDenki RS3 EtherCAT).Outputs.Target position 0x10 32 DINT
Slave 1 (SanyoDenki RS3 EtherCAT).Outputs.Profile velocity 0x30 32 UDINT
Slave 1 (SanyoDenki RS3 EtherCAT).Outputs.Profile acceleration 0x50 32 UDINT
Slave 1 (SanyoDenki RS3 EtherCAT).Outputs.Profile deceleration 0x70 32 UDINT
Slave 1 (SanyoDenki RS3 EtherCAT).Outputs.Target velocity 0x90 32 DINT
Slave 1 (SanyoDenki RS3 EtherCAT).Outputs.Touch probe function 0xB0 16 UINT
Slave 1 (SanyoDenki RS3 EtherCAT).Outputs.Digital outputs 0xC0 32 UDINT
6. 環境構築手順
① ネットワークカードを PC へ導入しました。
② EtherCAT® 接続する PC とサーボアンプを Cat5 以上の LAN ケーブルで接続しました。
③ セットアップ支援ソフト「SANMOTION モータセットアップ※」を使用するため、サーボアンプと PC を USB ケーブルで接続しました。
④ PC およびサーボアンプの電源を投入しました。
⑤ 今回の評価では、単相 200V で動作させるため、SANMOTION モータセットアップツールを用い、「主電源入力種別」の設定を「AC_Single-
phase(1)」へ変更しました。
⑥ 山洋電気社より提供された ESI ファイルをスレーブライブラリフォルダへ配置しました。
⑦ RSI-ECAT-Studio を使用し、ENI ファイルを作成しました。
⑧ 本評価では、デフォルトの PI マッピングを使用しました。(プロセスイメージ情報参照)
※サーボドライバの設定、モニタができる Windows ツール です。
https://products.sanyodenki.com/ja/sanmotion/software/sanmotion_motorsetup/
※TenAsys®, INtime®, eVM® and iRMX® are registered trademarks in USA of the TenAsys Corporation.※EtherCAT® は、Beckhoff Automation GmbH, Germanyの登録商標です。