第五章机器人的传感 -...
47
第五章 机器人的传感 Senses of Robotics 5.1 传感器的种类 5.2 触觉信息的获取 5.3 视觉信息的获取 5.4 距离信息的获取 5.5 环境识别 2019/4/26 1
Transcript of 第五章机器人的传感 -...
第五章 机器人的传感Senses of Robotics
5.1 传感器的种类
5.2 触觉信息的获取
5.3 视觉信息的获取
5.4 距离信息的获取
5.5 环境识别
2019/4/26 1

1.传感器的分类内部传感器:检测机器人本身状态(手臂间角度
等)的传感器。外部传感器:检测机器人所处环境(是什么物体,
离物体的距离有多远等)及状况(抓取的物体滑落等)的传感器。
外部传感器分为末端执行器传感器和环境传感器。末端执行器传感器:主要装在作为末端执行器的
手上,检测处理精巧作业的感觉信息。相当于触觉。环境传感器:用于识别物体和检测物体与机器人
的距离。相当于视觉。
第五章 机器人的传感
5.1传感器的种类
2019/4/26 2

2.内部状态的感觉(1)位置和角度传感器
典型的传感器是电位计。检测的是以电阻中心为基准位置的移动距离。
E:输入电压L:最大移动距离触头X:向左端移动的距离E:电阻右侧的输出电压
第五章 机器人的传感
5.1传感器的种类
图5.1 位置传感器
2019/4/26 3

2.内部状态的感觉(1)位置和角度传感器
另有光电传感器。
第五章 机器人的传感
5.1传感器的种类
图5.2 光电传感器
a.机构 b.感光量曲线
2019/4/26 4

2.内部状态的感觉(2)角度传感器:回转式编码器。
第五章 机器人的传感5.1传感器的种类
图5.3 回转式编码器2019/4/26 5

3.外部状况的感觉(1)物体识别传感器
典型的是视觉传感器。如摄像机。视觉是利用光(机器人可用红外线等)的非接触方式。
触觉也能识别物体。机器人可以用触觉传感器来实现这种机能。
第五章 机器人的传感5.1传感器的种类
2019/4/26 6

3.外部状况的感觉(2)物体探测传感器
视觉传感器是一种识别物体而且知道其存在的传感器。
例如光电开关。视觉传感器、光电开关和超声波传感器,即使
物体较远也能探测其存在。
第五章 机器人的传感5.1传感器的种类
2019/4/26 7

3.外部状况的感觉(3)极近物体探测传感器
探测非常近的物体存在的传感器称为接近传感器。
第五章 机器人的传感5.1传感器的种类
图5.4 接近觉传感器
2019/4/26 8

3.外部状况的感觉(4)距离传感器
摄像机做距离传感器。具体留待5.4节介绍。
超声波做距离传感器。可用于鱼群探测、金属内部探伤等方面。
第五章 机器人的传感5.1传感器的种类
2019/4/26 9

3.外部状况的感觉(5)力觉传感器
力觉传感器是检测力和力矩的施加地点、大小、方向三个量的传感器。
力的检测主要是用电阻应变片(参看5.2节)。
第五章 机器人的传感
5.1传感器的种类
2019/4/26 10

3.外部状况的感觉(6)其他传感器
利用声波:语音识别传感器。分析振动声音探测机械故障的点传感器。
热传感器:点检传感器。通过分析敲打的声音测定果品成熟程度的传感
器。根据近红外线的糖度吸收程度测定水果甜度的
传感器。
第五章 机器人的传感
5.1传感器的种类
2019/4/26 11
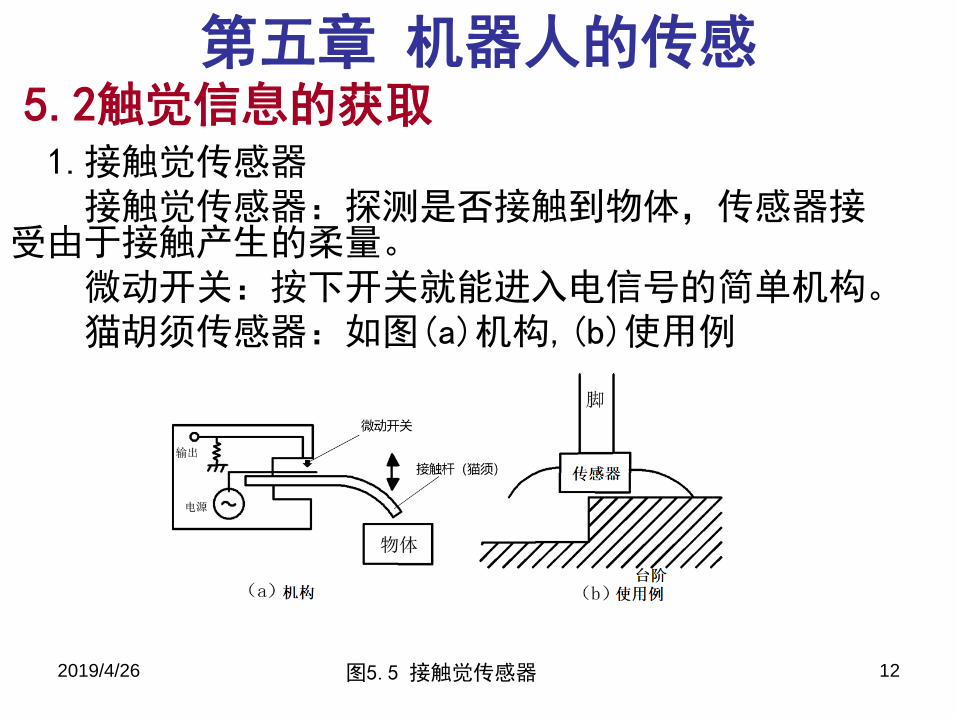
1.接触觉传感器接触觉传感器:探测是否接触到物体,传感器接
受由于接触产生的柔量。微动开关:按下开关就能进入电信号的简单机构。猫胡须传感器:如图(a)机构,(b)使用例
第五章 机器人的传感5.2触觉信息的获取
2019/4/26 12图5.5 接触觉传感器

2.压觉传感器压觉传感器:检测物体同手爪间产生的压力和力
以及其分布情况。利用压电元件或弹簧。如图是使用弹簧的平
面传感器。
第五章 机器人的传感5.2触觉信息的获取
图5.6 压觉传感器
2019/4/26 13

3.滑觉传感器滑觉传感器:检测垂直加压力方向的力和位移。
第五章 机器人的传感5.2触觉信息的获取
图5.7 力的平衡 图5.8 重心的移动
2019/4/26 14

4.力觉传感器力觉传感器主要利用电阻
应变片。原理:金属丝拉伸时电阻
变大。
第五章 机器人的传感5.2触觉信息的获取
图5.9 a.电桥电路2019/4/26 15

第五章 机器人的传感5.2触觉信息的获取
图5.9 b.检测时的状态
2019/4/26 16

1.PSD(position sensitive device)传感器PSD传感器:当光束照射到1维的线和2维的平面时,
检测光照射的位置。
L :电极1与电极2的距离。I1:流过电极1的电流。I2:流过电极2的电流。X:光照射点与电极1的距离。
第五章 机器人的传感5.3视觉信息的获取
图5.10 PSD
2019/4/26 17

2.视觉传感器机器人通过摄像机以图像的形式获得环境的信息。
(1)CCD(charge coupled device)传感器。CCD阵列,二维扫描,对表示灰度的电压采样,
二值数字化处理。每一定时间间隔扫描一遍。
第五章 机器人的传感
5.3视觉信息的获取
2019/4/26 18

2.视觉传感器(2)图像的投影。
O :原点,透镜中心。Z轴:光轴,摄像机的前方。xy轴:组成图像面。P点:物体上一点。p点:P在图像面上的投影。
第五章 机器人的传感5.3视觉信息的获取
图5.11 点到图像面的中心投影
2019/4/26 19

3.形状传感器
(1)利用CCD摄像机拍摄穿透光。热噪声的干扰。透明物体不能准确识别。
(2)若形状有特征,可用轮廓识别物体。例:由手印鉴别每个人。
由形状识别机械零件。
第五章 机器人的传感5.3视觉信息的获取
2019/4/26 20

4.光切断传感器将通过狭缝照射的面状光投射到物体上,再检测
反射光。
α :狭缝光源的俯角。2d :投射在物体上的两直线光
源间的距离。LWH:分别是物体的长宽高。
第五章 机器人的传感5.3视觉信息的获取
图5.12 a.狭缝光的照射
2019/4/26 21

第五章 机器人的传感5.3视觉信息的获取
图5.12 b.平面图
2019/4/26 22
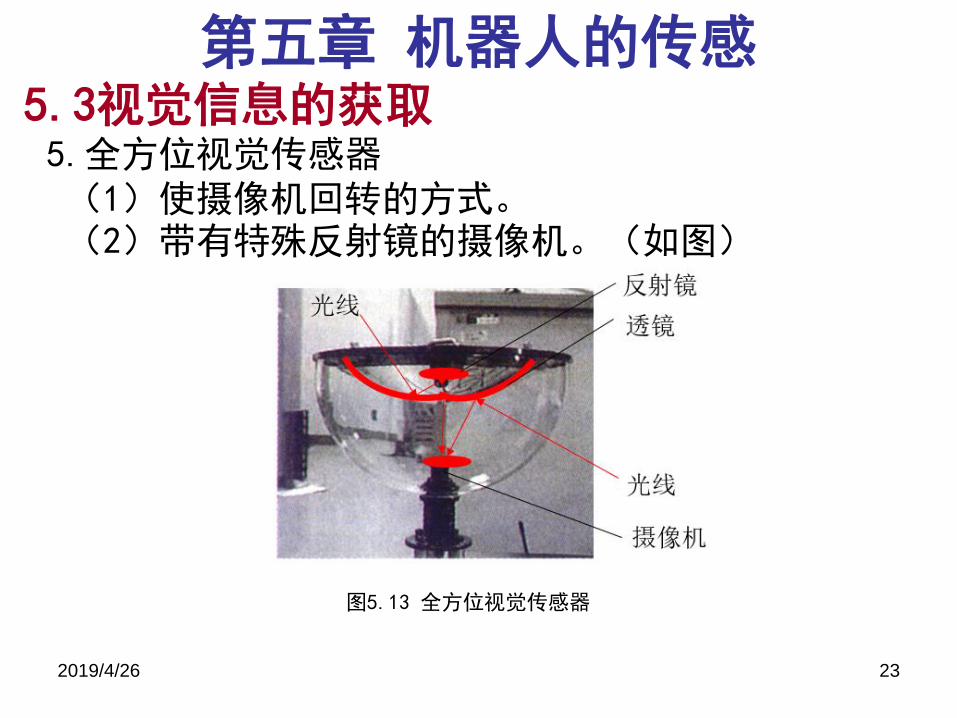
5.全方位视觉传感器(1)使摄像机回转的方式。(2)带有特殊反射镜的摄像机。(如图)
第五章 机器人的传感5.3视觉信息的获取
图5.13 全方位视觉传感器
2019/4/26 23

1.双目视觉由于视差得到距离感觉。
O1 :摄像机1的透镜中心。O2 :摄像机1的透镜中心。P :空间一点。p1 :P在摄像机1上的图像。p2 :P在摄像机1上的图像。
第五章 机器人的传感5.4距离信息的获取
图5.16 双目视觉
2019/4/26 24

2.投光法
投光法:采用主动光照射对象物体,用摄像机把照射点捕捉到图像上,再用三角测量算出距离。
例:测距计:一种把双目视觉一侧的摄像机置换成投光机的装置。一般以激光为光源。
第五章 机器人的传感5.4距离信息的获取
2019/4/26 25

2.投光法(1)点光源
θ:激光的照射角度d :透镜中心同光源间的距离XYZ:P的三维位置
第五章 机器人的传感5.4距离信息的获取
图5.17 点光照射
2019/4/26 26

2.投光法(2)狭缝光 :
原理如5.3.4节(3)符号化光:
如图
第五章 机器人的传感5.4距离信息的获取
图5.18 符号化模式
2019/4/26 27

5.5.1 触觉信息的处理
1 利用识别函数的形状识别
机器人的感觉5.5环境识别
图5.19 识别函数
2019/4/26 28
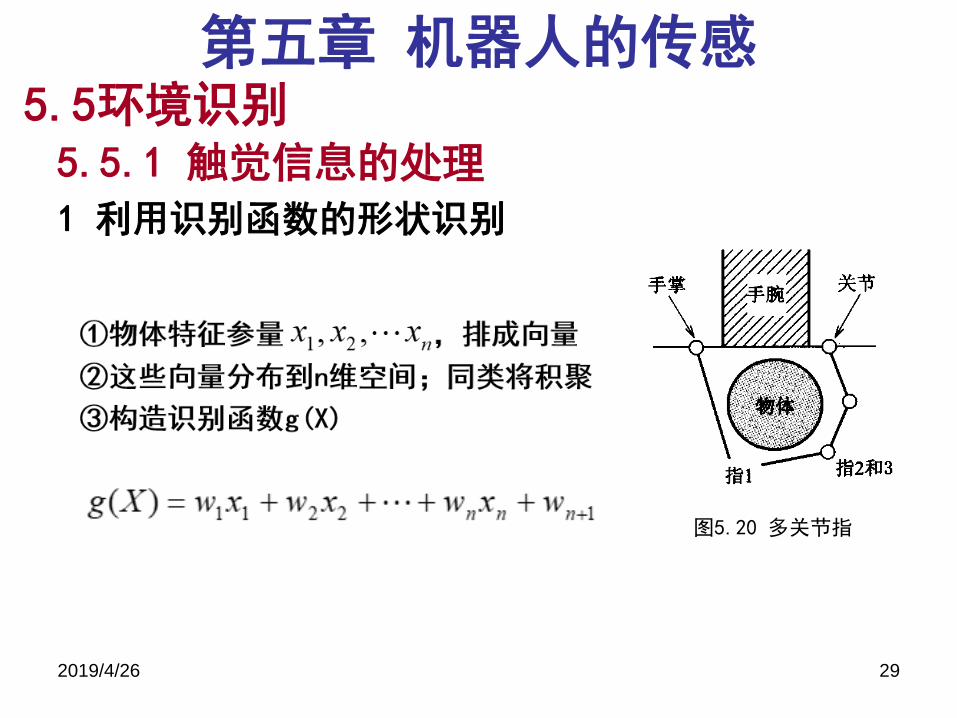
5.5.1 触觉信息的处理
1 利用识别函数的形状识别
第五章 机器人的传感5.5环境识别
图5.20 多关节指
2019/4/26 29

5.5.1 触觉信息的处理
2 按轮廓特征识别形状
从重心到边界画轮廓曲线
第五章 机器人的传感5.5环境识别
图5.21 距离特征2019/4/26 30

5.5.1 触觉信息的处理
2 按轮廓特征识别形状
从重心到边界画轮廓曲线
第五章 机器人的传感5.5环境识别
图5.22 装有位移传感器的爪
2019/4/26 31

5.5.2 基本的图象处理方法
1 二值化处理
按某一阈值二值化。
提取物体和背景时,注意透镜影响。
第五章 机器人的传感
5.5环境识别
2019/4/26 32

5.5.2 基本的图象处理方法
2 微分处理
由于投影亮度影响,不能进行二值化。
在边缘/棱线处亮度突变——边缘检测
第五章 机器人的传感5.5环境识别
图5.23 Sobel滤波器
2019/4/26 33

5.5.2 基本的图象处理方法
3 边缘像素提取和细线化与直线近似
第五章 机器人的传感
5.5环境识别
图5.24 分段直线的近似
2019/4/26 34

5.5.2 基本的图象处理方法
4 Hough变换
第五章 机器人的传感5.5环境识别
图5.25 Hough变换
2019/4/26 35

5.5.2 基本的图象处理方法
5 模板匹配
第五章 机器人的传感5.5环境识别
图5.26 模板匹配
2019/4/26 36

5.5.3 2维图象的处理
1 物体的位置检测
(1)软管的组装I
1)假定孔是暗的,周边是亮的
第五章 机器人的传感
5.5环境识别
2019/4/26 37

5.5.3 2维图象的处理
1 物体的位置检测
(1)软管的组装I
2)孔的中心可以看到内对面比壁
第五章 机器人的传感
5.5环境识别
图5.27 用窗口的中心位置检测
2019/4/26 38

5.5.3 2维图象的处理
1 物体的位置检测
(2)软管的组装II
第五章 机器人的传感
5.5环境识别
图5.28 利用Hough变换的中心位置检测
2019/4/26 39

5.5.3 2维图象的处理
2 复杂背景的物体识别
第五章 机器人的传感
5.5环境识别
图5.29 曲轴的几何模型
2019/4/26 40

5.5.3 2维图象的处理
2 复杂背景的物体识别
第五章 机器人的传感5.5环境识别
图5.30 曲轴的识别
2019/4/26 41

5.5.3 2维图象的处理
2 复杂背景的物体识别
第五章 机器人的传感5.5环境识别
图5.31 物体的把持方式
2019/4/26 42
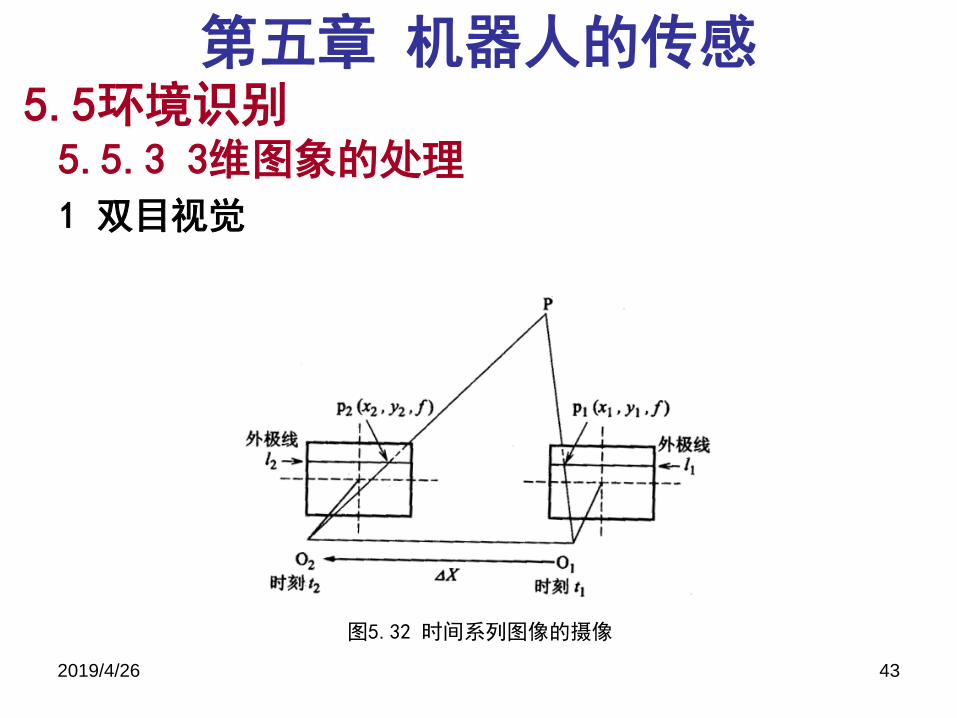
5.5.3 3维图象的处理
1 双目视觉
第五章 机器人的传感5.5环境识别
图5.32 时间系列图像的摄像
2019/4/26 43

5.5.3 3维图象的处理
2 时空图象
第五章 机器人的传感5.5环境识别
图5.34 外极面图像上的轨迹
2019/4/26 44

5.5.3 3维图象的处理
2 时空图象
第五章 机器人的传感5.5环境识别
图5.35 垂直边缘提取和投影
2019/4/26 45
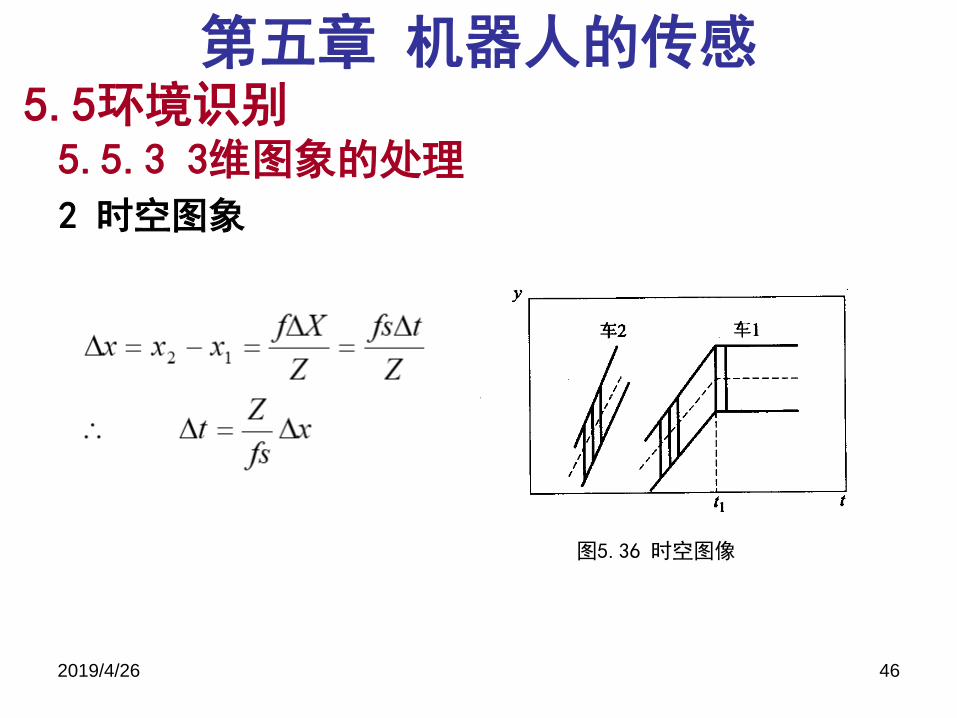
5.5.3 3维图象的处理
2 时空图象
第五章 机器人的传感5.5环境识别
图5.36 时空图像
2019/4/26 46

5.5.3 3维图象的处理
3 狭缝图象
第五章 机器人的传感5.5环境识别
图5.39 狭缝图像
a.情景 b.直线近似
2019/4/26 47