GTL-212104E213BQ01-F UI 套件用户手册 · 5 vsh2 正极驱动电压 6 tscl 数字温度传感器时钟引脚的i2c接口 7 tsda 数字温度传感器数据引脚的i2c接口 8
description

传感器与接口for RoboGame2013
陆思良精密机械与精密仪器系
BA12009
Email: [email protected]
Homepage: http://202.38.64.10/~lusliang/

Measurement Control Information
Processing
课程宗旨
2
本课介绍有可能在机器人上用到的传感器及其接口技术。
本课倾向于采用直观的图片和实物演示方法向大家展示各种传感器。如果大家觉得可能用得上,还需要自己去查阅更详细的资料。
传感器和接口的选择和选型需要结合机器人的具体功能和实现方式。

Measurement Control Information
Processing
传感器
3
传感器功能:将电、磁、力等非电信号转化为电信号,以便于计算机处理。目录:测距类传感器:1.激光测距传感器 2.红外测距传感器3.超声波测距导航类传感器:4.颜色(巡线)传感器5.电子罗盘6. GPS 7.陀螺仪计数类传感器:8.光电码盘 9.霍尔传感器

Measurement Control Information
Processing
测距类传感器 1.红外测距传感器(红外接近开关)
特点: 价格便宜;距离预先可调;有两种形式,一种为反射型(发射和接收都在一个管子上),一种为对射型(一个发射一个接收);频响 100Hz左右。
使用简单,三根线:一根电源线,一根地线,一根信号线(只能输出开关量,即高或者低电平)。
选购时注意:尽可能选用 5V的(为和单片机匹配)。
4

Measurement Control Information
Processing
测距类传感器 2.激光测距传感器 原理:通过发射和接收激光,计算时间差,乘以光速等于距离。
特点: 价格昂贵;距离连续可测(也有只输出开关量);精度高(右图的为 0.22mm);频响 1kHz左右。
输出方式,工业上多采用 4-20mA电流输出,一般在采集端接电阻转换为电压信号进行采集。
5

Measurement Control Information
Processing
测距类传感器 3.超声波传感器 原理:通过发射和接收超声波
( >20kHz),计算时间差,乘以声速(~340m/s)等于距离。
特点: 价格便宜;距离连续可测;测量范围宽;精度较高( cm级别);频响较高。
购买建议:经费允许的话也可以购买输出数字信号的(如 TTL接口)。
6

Measurement Control Information
Processing
导航类传感器 4.颜色(巡线)传感器 原理:一个发光管一个接收管;物体不同颜色表面对相同关照的反射不一样,通过反射的强度转化为电压的大小。
特点: 价格便宜;反应迅速;一般配备可调电阻调整阈值。
使用方法:可采用比较器( LM393)将模拟量转化为开关量供单片机识别;一般采用多个传感器组成阵列,提高识别精度(编码方法介绍)。
7

Measurement Control Information
Processing
导航类传感器 5.电子罗盘(指南针) 原理:顾名思义,用于检测和地磁场的偏角)。
特点: 一般有两种,平面罗盘和三轴罗盘;平面罗盘精度较差,对使用环境要求高;三轴罗盘能够对倾角进行补偿,精度高,价格也相对昂贵。
注意:需要远离铁磁性物质。 选购建议:经费允许情况下可选用数字信号输出的模块。
8

Measurement Control Information
Processing
导航类传感器 6.GPS接收机 原理:通过接收 4 个以上卫星信号计算接收机的经纬度及其他信息。
特点: 功能强大;价格便宜; 100块钱的接收模块精度大概 5 米;室内可能信号不好;全球卫星免费用(国产北斗)。
使用建议:绝大部分的手机都有GPS功能,可考虑写程序调用其 GPS信号。
9

Measurement Control Information
Processing
导航类传感器 7.陀螺仪(角加速度传感器) 原理:惯性导航器件 特点: 不需要依赖其它环境(如电子罗盘需要地磁场),可靠性高,稳定性好;价格不等,可根据需求选择。
使用:一般用的是角度信息,需要将角加速度两次积分;但存在时漂问题,因此一般配合其它传感器使用,如重力传感器等;如需使用,参考:传感器信息融合,卡尔曼滤波等方法。
10

Measurement Control Information
Processing
计数类传感器 8.光电码盘(光栅) 原理:码盘圆周上开若干小孔,码盘上下方各有一个光电发射管和一个光电接收管,旋转时产生脉冲信号,通过脉冲信号计数。
特点: 一般用于电机测速。 使用注意:辨向原理(双路 90°电气相角,加法 /减法器74LS191 )。
PID 演示
11

Measurement Control Information
Processing
计数类传感器 9.霍尔器件 原理:霍尔器件上方有磁铁时,输出电平会翻转。
特点: 一般用于无刷电机(转子是永磁铁)测速。
注:做机器人常用电机的选型和区别可参考我之前的培训:
http://202.38.64.10/~lusliang/robogame2012.html
12

Measurement Control Information
Processing
传感器接口 接口非常重要!选传感器和买传感器十分简单,但从传感器读取数据可能会花费非常多的时间。
接口用于两个器件之间数据传输,绝大部分的传输方法都可视为高低电平变化,不同的协议只是规定了变化的方式而已。
常见接口 /协议 /总线: 1.RS232/RS485/TTL(串口) 2.SPI 3.IIC 4.USB
13

Measurement Control Information
Processing
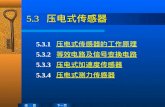
RS232/RS485/TTL 标准 RS232接口为 9 针,绝大部分情况只用到 3 针( Tx发送, Rx接收, GND地)。逻辑电平 1 : -3~-15V,逻辑电平 0:3-15V 。 RS232一般在电脑上。
RS485可认为是差分传输的RS232,可长距离输送信号。
TTL(可认为是 RS232的单片机版):逻辑电平 1:3.3V或者 5V,逻辑电平 0:0V。
RS232 和 TTL通信,需要电平转换芯片,Max232 ( 5V),Max3232 ( 3.3V)
14

Measurement Control Information
Processing
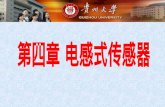
RS232/RS485/TTL 注: 1.图中的电容用无极性的电容就行,用 0.1UF也行,用 10UF好像也行,具体看 datasheet。
2.单片机的发送口( Tx)接电脑的接收口( Rx),接反会发热。
15

Measurement Control Information
Processing
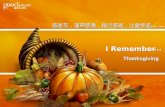
SPI 和 IIC SPI 和 IIC ( I2C)是两种在嵌入式系统中十分常见的接口,它们有各自的协议。
硬件(原生) SPI ( IIC)和模拟 SPI ( IIC)。
如右图 STM32单片机中就有原生 SPI 和 IIC,使用时较为简单,直接往对应寄存器里写数据,单片机就能够自动解码发送出去。
16

Measurement Control Information
Processing
SPI 和 IIC 如果单片机没有 SPI ( IIC),也可以用模拟的方法来实现,即用普通的 I/O口对照协议来编程(要注意时钟信号)。
17

Measurement Control Information
Processing
USB 可能用到的还是电脑和单片机的通信, STM32有原生USB口,但最常用的方法还是使用串口来通信。现在的笔记本一般都没有串口,因此介绍几种笔记本其它接口转串口的方法。
1. Express Card->RS232(TTL)
特点:性能最稳定,价格略高。
18

Measurement Control Information
Processing
USB 2. USB->RS232(TTL) 三种芯片:
PL2303 , CH340 , FT232 ,价格(稳定性)由低到高。
19
注意: USB接口尽量采用方头的,比较牢靠

Measurement Control Information
Processing
Thanks!
20