§4.3 电涡流式传感器
36
§4.3 电电电电 电电 传 §4.3.1 电电电电 电电电电电电电 传
-
Upload
seth-perkins -
Category
Documents
-
view
69 -
download
1
description
§4.3 电涡流式传感器. §4.3.1 电涡流式传感器的基本原理. 涡流式传感器是利用金属导体在交流磁场中的 电涡流效应 。若一金属板置于一只线圈的附近,它们之间相互的间距为 δ ,当线圈输入一交变电流 i 时,便产生交变磁通量 Φ ,金属板在此交变磁场中会产生感应电流 i 1 , i 1 在金属体内是闭合的,所以称之为 电涡流或涡流 。 涡流的大小与金属板的电阻率 ρ 、磁导率 μ 、厚度 h 、金属板与线圈的距离 δ 、激励电流角频率 ω 等参数有关 。若固定某些参数,就可根据涡流的变化测量另一个参数。. R 1. R. M. L 1. L. - PowerPoint PPT Presentation
Transcript of §4.3 电涡流式传感器

§4.3 电涡流式传感器 §4.3.1 电涡流式传感器的基本原理

涡流式传感器是利用金属导体在交流磁场中的电涡流效应。若一金属板置于一只线圈的附近,它们之间相互的间距为 δ ,当线圈输入一交变电流 i 时,便产生交变磁通量 Φ ,金属板在此交变磁场中会产生感应电流 i1 , i1 在金属体内是闭合的,所以称之为电涡流或涡流。涡流的大小与金属板的电阻率 ρ 、磁导率 μ 、厚度 h 、金属板与线圈的距离 δ 、激励电流角频率 ω 等参数有关。若固定某些参数,就可根据涡流的变化测量另一个参数。

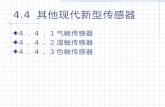
§4.3.2 电涡流传感器的等效电路 把被测导体上形成的电涡流等效成一个短路环中的电流,短路环可以认为是一匝短路线圈,其电阻为 R1 、电感为 L1 。这样线圈与被测导体便可等效为两个相互耦合的线圈。线圈与导体间存在一个互感 M ,它随线圈与导体间距 x 的减小而增大。
图 4-16 电涡流传感器等效电路
MR
L1L
R1
1U1II

根据克希霍夫定律,可列出下面的方程:
....
UIMjILjIR 11
0.
11
.
11
.
ILjIRIMj
111 LjR
IMjI
..

121
21
22
121
21
22
1
21
21
1122
1
11
1
LLR
MLjR
LR
MR
U
LR
LjRMLjR
U
LjR
MjMjLjR
UI
.
...
传感器线圈的等效阻抗为:
12
121
22
121
21
221 L
LR
MLjR
LR
MR
I
UZ .
.

线圈的等效电阻和电感为:线圈的等效电阻和电感为:
121
21
22
RLR
MRReq
12
121
22
LLR
MLLeq
当被测导体的某些参数发生变化时,可引起涡流式传感器线圈的阻抗 Z 、电感 L 和品质因数 Q 变化,测量 Z 、 L 或 Q 就可求出被测量参数的变化。
线圈的等效线圈的等效 QQ 值为:值为:eq
eq
R
LQ

§4.3.3 电涡流传感器的种类电涡流在金属导体内的渗透深度为 :
fh
r
5030
说明电涡流在金属导体内的渗透深度与传感器线圈的激励信号频率有关。故电涡流式传感器可分为高频反射式和低频透射式两类。目前高频反射式电涡流传感器应用较广泛。

高频 (>lMHz) 激励电流产生的高频磁场作用于金属板的表面,由于集肤效应,在金属板表面将形成涡电流。与此同时,该涡流产生的交变磁场又反作用于线圈,引起
线圈自感 L 或阻抗 ZL 的变化。线圈自感 L 或阻抗 ZL 的
变化与距离该金属板的电阻率 ρ 、磁导率 μ 、激励电流 i 及角频率 ω 等有关,若只改变距离 δ 而保持其它参数不变,则可将位移的变化转换为线圈自感的变化,通过测量电路转换为电压输出。
高频反射式涡流传感器多用于位移测量。
1. 1. 高频反射式电涡流传感器高频反射式电涡流传感器

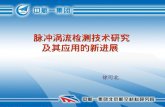
下图是 CZF1 型涡流传感器的结构原理,它是将导线绕在聚四氟乙烯框架窄槽内。
1 2 3 4
56
1 线圈 2 框架 3 衬套4 支架 5 电缆 6 插头

ie
dM
~
ΦeΦ i
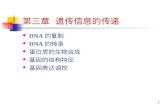
电涡流传感器原理图

高频激励信号使线圈产生一个高频交变磁场φi ,当被测导体靠近时,在磁场作用范围的导体表层产生电涡流 ie ,而电涡流又将产生一交变磁场 φe 阻碍外磁场的变化。在被测导体内存在着电涡流损耗(当频率较高时,忽略磁损耗)。能量损耗使传感器的 Q 值和等效阻抗 Z 降低,因此当被测体与传感器间的距离 d 改变时,传感器的 Q 值和等效阻抗 Z 、电感 L 均发生变化,于是把位移量转换成电量。这便是电涡流传感器的基本原理。

2. 2. 低频透射式电涡流传感器低频透射式电涡流传感器

发射线圈 L1 和接收线圈 L2 分置于被测金属板的上下方。由于低频磁场集肤效应小,渗透深,当低频 ( 音频范围 ) 电压 u1 加到线圈 L1 的两端后,所产生磁力线的一部分透过金属板 ,使线圈 L2 产生感应电动势 u2 。但由于涡流消耗部分磁场能量,使感应电动势 u2 减少,当金属板越厚时,损耗的能量越大,输出电动势 u2越小。因此, u2 的大小与金属板的厚度及材料的性质有关 .试验表明 u2 随材料厚度 h的增加按负指数规律减少 ,因此,若金属板材料的性质一定,则利用 u2 的变化即可测厚度。

线圈 L2 的感应电压与被测厚度的增大按负幂指
数的规律减小,即heu
2
式中 δ—— 被测金属板的厚度; h——贯穿深度。
fh

测量厚度时,激励频率应选得较低。频率太高,贯穿深度小于被测厚度,不利于进行厚度测量,通常选激励频率为 1kHz左右。 测薄金属板时,频率一般应略高些,测厚金属板时,频率应低些。在测量电阻率 ρ 较小的材料时,应选较低的频率(如 500Hz ),测量 ρ 较大的材料时,应选用较高的频率(如 2kHz ),从而保证在测量不同材料时能得到较好的线性和灵敏度。

§4.3.4 电涡流传感器的转换电路
电涡流传感器转换电路的作用就是将 Z 、
L 或 Q 转换为电压或电流的变化。阻抗 Z 的转
换电路一般用电桥,电感 L 的转换电路一般用
谐振电路,又可以分为调幅法和调频法两种。

1. 1. 交流电桥交流电桥 将传感器线圈的阻抗变化转化为电压或电流的变化。图中 L1 、 L2 是两个差动传感器线
圈,它们与电容 C1 、 C2 的并联阻抗 Z1 、 Z2
作为电桥的两个桥臂 .
U0
图 4-22 交流电桥测量电路
L1
振荡器
R1
R2 C2
~
C1
L2
检波检波 放大放大
111 C//LZ
222 C//LZ

2. 调幅式电路
图 4-23 调幅式测量电路原理框图
涡流传感器线圈与电容并联组成 LC并联谐振回路,由恒流源石英晶体振荡器供电。没有被测物体时,并联谐振回路的谐振频率等于激励振荡器的频率 f0 ,此时 LC并联回路呈现阻抗最大。
谐振回路上输出电压 U0 为: U0 = I0·Z
II00
晶体振荡器L C
输出放大 检波 滤波
RUU00

§4.4 电感式传感器的应用
图 4-25 加速度传感器1 悬臂梁; 2 差动变压器; 3 衔铁
1
2
a
3

位移测量
振幅测量
转速测量

差动式电感测厚仪
L1 和 L2 为电感传感器的两个线圈,构成桥路相
邻两桥臂,另两个桥臂是 C1 、 C2 。 4 只二极管和 4
只电阻 R1~R4 (减小温度误差)组成相敏整流器。

1. 1. 若若 LL1 1 >L>L22 ,不论电源,不论电源极性是极性是 aa 点为正点为正 bb 点为负点为负(( DD11 ,, DD44 导通)导通);或;或 aa 点点为负为负 bb 点为正(点为正( DD22 ,, DD33 导导通),通), dd点电位总是高于点电位总是高于 cc点电位,点电位, MM 的指针的指针向一个向一个方向偏转方向偏转。。 2. 2. 若若 LL1 1 < L< L22 ,, dd点电位总是低于点电位总是低于 cc 点电位,点电位,MM 的指针向的指针向另一个方向偏转另一个方向偏转。。


电感测微仪电感测微仪
探头
测量电桥
交流放大
相敏检波
指示器
振荡器

变气隙式电感测微仪变气隙式电感测微仪

L
FF
电感压力传感器电感压力传感器 —— —— 变气隙式结构变气隙式结构
P
A

图 4-26 微压传感器1 接头; 2 膜盒; 3 底座; 4 线路板;
5 差动变压器; 6 衔铁;7 罩壳
12
3
4
5 6
7

P
变气隙式差动压力传感器变气隙式差动压力传感器

CT
kHzf30
20
电感式油压传感器 电感式油压传感器 —— 液压传动的各种机械装置—— 液压传动的各种机械装置

电感式接近传感器电感式接近传感器

电感式接近传感器应用举例电感式接近传感器应用举例11 、生产中测量产品的长度、生产中测量产品的长度
每个脉冲对应的长度:每个脉冲对应的长度: NDL /0 被测物总长度:被测物总长度: 0LML

22 、生产线工件的计数、生产线工件的计数
33 、机械手的限位、机械手的限位


44 、生产工件加工定位、生产工件加工定位
55 、时序控制、时序控制


P75 P75 11 、、 22 、、 44 、、 66 思考:思考: 33 、、 55