第五章 PLC 的步进电机控制系统
121
第第第 第第第 PLC PLC 第第第第第第第第 第第第第第第第第 统 统
-
Upload
salvador-gilmore -
Category
Documents
-
view
82 -
download
8
description
第五章 PLC 的步进电机控制系统. 步进电机是一种将电脉冲转化为角位移的执行机构。一般电动机是连续旋转的,而步进电机的转动是一步一步进行的。每输入一个脉冲电信号,步进电机就转动一个角度。通过改变脉冲频率和数量,即可实现调速和控制转动的角位移大小,具有较高的定位精度,其最小步距角可达 0.75° ,转动、停止、反转反应灵敏、可靠。在开环数控系统中得到了广泛的应用。. 5.1 步进电机的分类、基本结构和工作原理. 步进电机的分类 1. 永磁式步进电机 2. 反应式步进电机 3. 混合式步进电机 步进电机的基本结构和工作原理. 步进电机的分类. - PowerPoint PPT Presentation
Transcript of 第五章 PLC 的步进电机控制系统

第五章 第五章 PLCPLC 的步进电的步进电机控制系统机控制系统

步进电机是一种将电脉冲转化为角位移的步进电机是一种将电脉冲转化为角位移的执行机构。一般电动机是连续旋转的,而执行机构。一般电动机是连续旋转的,而步进电机的转动是一步一步进行的。每输步进电机的转动是一步一步进行的。每输入一个脉冲电信号,步进电机就转动一个入一个脉冲电信号,步进电机就转动一个角度。通过改变脉冲频率和数量,即可实角度。通过改变脉冲频率和数量,即可实现调速和控制转动的角位移大小,具有较现调速和控制转动的角位移大小,具有较高的定位精度,其最小步距角可达高的定位精度,其最小步距角可达 0.75°0.75° ,,转动、停止、反转反应灵敏、可靠。在开转动、停止、反转反应灵敏、可靠。在开环数控系统中得到了广泛的应用。 环数控系统中得到了广泛的应用。

5.15.1 步进电机的分类、基本结构和工步进电机的分类、基本结构和工作原理 作原理
步进电机的分类 步进电机的分类 1.1. 永磁式步进电机永磁式步进电机 2.2. 反应式步进电机反应式步进电机 3.3. 混合式步进电机混合式步进电机 步进电机的基本结构和工作原理 步进电机的基本结构和工作原理

步进电机的分类 步进电机的分类 1.1. 永磁式步进电机一般为两相,转矩和体积较小,永磁式步进电机一般为两相,转矩和体积较小,
步进角一般为步进角一般为 7.57.5 度或度或 1515 度。度。 2.2. 反应式步进电机一般为三相,可实现大转矩输反应式步进电机一般为三相,可实现大转矩输
出,步进角一般为出,步进角一般为 1.51.5 度,但噪声和振动都很大。度,但噪声和振动都很大。 3.3. 混合式步进电机是指混合了永磁式和反应式的混合式步进电机是指混合了永磁式和反应式的
优点。它又分为两相和五相。两相步进角一般分优点。它又分为两相和五相。两相步进角一般分为为 1.81.8 度而五相步进角一般为 度而五相步进角一般为 0.720.72 度。这种步进度。这种步进电机的应用最为广泛。 电机的应用最为广泛。

步进电机的基本结构和工作原理 步进电机的基本结构和工作原理 三相反应式步进电机的三相反应式步进电机的
结构如图所示 结构如图所示 定子、转子是用硅钢片定子、转子是用硅钢片
或其他软磁材料制成的。或其他软磁材料制成的。定子的每对极上都绕有定子的每对极上都绕有一对绕组,构成一相绕一对绕组,构成一相绕组,共三相称为组,共三相称为 AA 、、 BB 、、CC 三相。 三相。

步进电机的基本结构和工作原理步进电机的基本结构和工作原理 在定子磁极和转子上都开有齿分度相同的在定子磁极和转子上都开有齿分度相同的
小齿,采用适当的齿数配合,当小齿,采用适当的齿数配合,当 AA 相磁极相磁极的小齿与转子小齿一一对应时,的小齿与转子小齿一一对应时, BB 相磁极相磁极的小齿与转子小齿相互错开的小齿与转子小齿相互错开 1/31/3 齿距,齿距, CC相则错开相则错开 2/32/3 齿距。如图所示 齿距。如图所示

步进电机的基本结构和工作原理步进电机的基本结构和工作原理 上图中,上图中, AA 相绕组与齿相绕组与齿 11 、、 55 一一对应,一一对应,
而此时而此时 BB 相绕组与齿相绕组与齿 22 错开错开 1/31/3 齿距,而齿距,而与齿与齿 33 错开错开 2/32/3 齿距,齿距, CC 相绕组与齿相绕组与齿 33 错错开开 2/32/3 齿距,而与齿齿距,而与齿 44 错开错开 1/31/3 齿距。 齿距。
电机的位置和速度由绕组通电次数(脉冲电机的位置和速度由绕组通电次数(脉冲数)和频率成一一对应关系。而方向由绕数)和频率成一一对应关系。而方向由绕组通电的顺序决定。 组通电的顺序决定。

步进电机的基本结构和工作原理步进电机的基本结构和工作原理 步进电机的基本参数主要有以下内容步进电机的基本参数主要有以下内容 11 .电机固有步距角.电机固有步距角 22 .步进电机的相数 .步进电机的相数 33 .保持转矩(.保持转矩( HOLDING TORQUEHOLDING TORQUE ) ) 44 .钳制转矩(.钳制转矩( DETENT TORQUEDETENT TORQUE ) )

11.电机固有步距角 .电机固有步距角 它表示控制系统每发一个步进脉冲信号,它表示控制系统每发一个步进脉冲信号,
电机所转动的角度。电机出厂时给出了一电机所转动的角度。电机出厂时给出了一个步距角的值,这个步距角可以称之为个步距角的值,这个步距角可以称之为“电机固有步距角”,它不一定是电机实“电机固有步距角”,它不一定是电机实际工作时的真正步距角,真正的步距角和际工作时的真正步距角,真正的步距角和驱动器有关。 驱动器有关。

22.步进电机的相数: .步进电机的相数: 步进电机的相数是指电机内部的线圈组数,目前步进电机的相数是指电机内部的线圈组数,目前
常用的有二相、三相、四相、五相步进电机。电常用的有二相、三相、四相、五相步进电机。电机相数不同,其步距角也不同,一般二相电机的机相数不同,其步距角也不同,一般二相电机的步距角为步距角为 0.9°/1.8°0.9°/1.8° 、三相的为、三相的为 0.75°/1.5°0.75°/1.5° 、五相、五相的为的为 0.36°/0.72° 0.36°/0.72° 。在没有细分驱动器时,用户主。在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己步距角要靠选择不同相数的步进电机来满足自己步距角的要求。如果使用细分驱动器,则“相数”将变的要求。如果使用细分驱动器,则“相数”将变得没有意义,用户只需在驱动器上改变细分数,得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。就可以改变步距角。

33.保持转矩(.保持转矩( HOLDING TORQHOLDING TORQUEUE) )
保持转矩是指步进电机通电但没有转动时,保持转矩是指步进电机通电但没有转动时,定子锁住转子的力矩。它是步进电机最重定子锁住转子的力矩。它是步进电机最重要的参数之一,通常步进电机在低速时的要的参数之一,通常步进电机在低速时的力矩接近保持转矩。由于步进电机的输出力矩接近保持转矩。由于步进电机的输出力矩随速度的增大而不断衰减,输出功率力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。成为了衡量步进电机最重要的参数之一。比如,当人们说比如,当人们说 2N.m2N.m 的步进电机,在没的步进电机,在没有特殊说明的情况下是指保持转矩为有特殊说明的情况下是指保持转矩为 2N.m2N.m的步进电机。 的步进电机。

44.钳制转矩(.钳制转矩( DETENT TORQDETENT TORQUEUE) )
钳制转矩是指步进电机没有通电的情况下,钳制转矩是指步进电机没有通电的情况下,定子锁住转子的力矩。由于反应式步进电定子锁住转子的力矩。由于反应式步进电机的转子不是永磁材料,所以它没有机的转子不是永磁材料,所以它没有 DETDETENT TORQUEENT TORQUE 。 。

步进电机主要有以下特点步进电机主要有以下特点 11 .一般步进电机的精度为步进角的.一般步进电机的精度为步进角的 3-5%3-5% ,,
且不累积。且不累积。

步进电机主要有以下特点步进电机主要有以下特点 22 .步进电机外表允许的最高温度取决于不.步进电机外表允许的最高温度取决于不
同电机磁性材料的退磁点。同电机磁性材料的退磁点。步进电机温度过高时会使电机的磁性材料步进电机温度过高时会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏材料的退磁点都在摄氏 130130 度以上,有的度以上,有的甚至高达摄氏甚至高达摄氏 200200 度以上,所以步进电机度以上,所以步进电机外表温度在摄氏外表温度在摄氏 80-9080-90 度完全正常。度完全正常。

步进电机主要有以下特点步进电机主要有以下特点 33 .步进电机的力矩会随转速的升高而下降。.步进电机的力矩会随转速的升高而下降。
当步进电机转动时,电机各相绕组的电感当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向将形成一个反向电动势;频率越高,反向电动势越大。在它的作用下,电机随频率电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导(或速度)的增大而相电流减小,从而导致力矩下降。致力矩下降。

步进电机主要有以下特点步进电机主要有以下特点 44 .步进电机低速时可以正常运转,但若高于一.步进电机低速时可以正常运转,但若高于一
定速度就无法启动,并伴有啸叫声。定速度就无法启动,并伴有啸叫声。步进电机有一个技术参数:空载启动频率,即步步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频能发生丢步或堵转。在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉冲频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升定加速度升到所希望的高频(电机转速从低速升到高速)。 到高速)。

5.25.2 步进电机在工业控制领域的主要应用步进电机在工业控制领域的主要应用情况介绍情况介绍
步进电机作为执行元件,是机电一体化的关键产步进电机作为执行元件,是机电一体化的关键产品之一品之一 , , 广泛应用在各种家电产品中,例如打印广泛应用在各种家电产品中,例如打印机、磁盘驱动器、玩具、雨刷、震动寻呼机、机机、磁盘驱动器、玩具、雨刷、震动寻呼机、机械手臂和录像机等。另外步进电机也广泛应用于械手臂和录像机等。另外步进电机也广泛应用于各种工业自动化系统中。由于通过控制脉冲个数各种工业自动化系统中。由于通过控制脉冲个数可以很方便的控制步进电机转过的角位移,且步可以很方便的控制步进电机转过的角位移,且步进电机的误差不积累,可以达到准确定位的目的。进电机的误差不积累,可以达到准确定位的目的。还可以通过控制频率很方便的改变步进电机的转还可以通过控制频率很方便的改变步进电机的转速和加速度,达到任意调速的目的,因此步进电速和加速度,达到任意调速的目的,因此步进电机可以广泛的应用于各种开环控制系统中 机可以广泛的应用于各种开环控制系统中

5.35.3西门子西门子 PLCPLC 对步进电机的控制对步进电机的控制方法方法
PLCPLC 直接控制步进电机直接控制步进电机 西门子西门子 PLCPLC 与步进电机驱动器控制步进电与步进电机驱动器控制步进电
机 机 高频脉冲输出控制举例 高频脉冲输出控制举例

PLCPLC 直接控制步进电机 直接控制步进电机 使用使用 PLCPLC 直接控制步进电机时,可使用直接控制步进电机时,可使用 PP
LCLC 产生控制步进电机所需要的各种时序的产生控制步进电机所需要的各种时序的脉冲。例如三相步进电机可采用三种工作脉冲。例如三相步进电机可采用三种工作方式:方式:
三相单三拍三相单三拍 三相双三拍三相双三拍 三相单六拍 三相单六拍

PLCPLC 直接控制步进电机直接控制步进电机 可根据步进电机的工作方式,以及所要求可根据步进电机的工作方式,以及所要求
的频率(步进电机的速度),画出的频率(步进电机的速度),画出 AA 、、 BB 、、CC各相的时序图。并使用各相的时序图。并使用 PLCPLC 产生各种时产生各种时序的脉冲序的脉冲
例如:采用西门子例如:采用西门子 S7-300PLCS7-300PLC 控制三相步控制三相步进电机的过程。 进电机的过程。
要求通过要求通过 PLCPLC 可实现三相步进电机的起停可实现三相步进电机的起停控制、正反转控制,以及三种工作方式的控制、正反转控制,以及三种工作方式的切换(每相通电时间为切换(每相通电时间为 11 秒钟)。 秒钟)。

采用西门子采用西门子 S7-300PLCS7-300PLC 控制三相步进电控制三相步进电机的过程机的过程
变量约定如下 变量约定如下 输入:启动按钮输入:启动按钮 SB1SB1 :: I0.0I0.0 方向选择开关方向选择开关 SA1SA1 :: I0.1I0.1 停止按钮停止按钮 SB2SB2 :: I0.2I0.2 三相单三拍方式选择三相单三拍方式选择 SA2SA2 :: I0.3I0.3 三相双三拍方式选择三相双三拍方式选择 SA3SA3 :: I0.4I0.4 三相单六拍方式选择三相单六拍方式选择 SA4SA4 :: I0.5 I0.5

采用西门子采用西门子 S7-300PLCS7-300PLC 控制三相步进电控制三相步进电机的过程机的过程
输出: 输出: AA 相加电压:相加电压: Q0.0Q0.0 BB 相加电压:相加电压: Q0.1Q0.1 CC 相加电压:相加电压: Q0.2Q0.2 启动指示灯:启动指示灯: Q0.3Q0.3 三相单三拍运行方式:三相单三拍运行方式: Q0.4Q0.4 三相双三拍运行方式:三相双三拍运行方式: Q0.5Q0.5 三相单六拍运行方式:三相单六拍运行方式: Q0.6Q0.6 输出脉冲显示灯: 输出脉冲显示灯: Q0.7Q0.7

采用西门子采用西门子 S7-300PLCS7-300PLC 控制三相步进电控制三相步进电机的过程机的过程
三相单三拍正向的时序图如图所示 三相单三拍正向的时序图如图所示

采用西门子采用西门子 S7-300PLCS7-300PLC 控制三相步进电控制三相步进电机的过程机的过程
三相双三拍正向的时序图如图所示 三相双三拍正向的时序图如图所示

采用西门子采用西门子 S7-300PLCS7-300PLC 控制三相步进电控制三相步进电机的过程机的过程
三相单六拍正向时序图如图所示 三相单六拍正向时序图如图所示

PLCPLC 直接控制步进电机直接控制步进电机 编程方法 编程方法 11 .使用定时器指令实现各种时序脉冲的要.使用定时器指令实现各种时序脉冲的要
求:使用定器产生不同工作方式下的工作求:使用定器产生不同工作方式下的工作脉冲,然后按照控制开关状态输出到各相脉冲,然后按照控制开关状态输出到各相对应的输出点控制步进电机。 对应的输出点控制步进电机。

编程方法编程方法 11 .例如:使用图所示的程序可以产生所需.例如:使用图所示的程序可以产生所需
要的脉冲:要的脉冲:

编程方法编程方法 M0.0M0.0 作为总控制状态位,控制脉冲发生指作为总控制状态位,控制脉冲发生指令是否启动。一旦启动,采用令是否启动。一旦启动,采用 T0T0 、、 T1T1 、、T2T2 以及它们的组合可以得到三相单三拍和以及它们的组合可以得到三相单三拍和三相双三拍的两种工作方式下,各相的脉三相双三拍的两种工作方式下,各相的脉冲信号。如冲信号。如 T0T0 的状态为三相单三拍工作状的状态为三相单三拍工作状态下态下 AA 相的脉冲。同理可使用类似程序得相的脉冲。同理可使用类似程序得到三相单六拍时各相所需的脉冲信号。到三相单六拍时各相所需的脉冲信号。

编程方法编程方法 22 .使用移位指令实现各相所.使用移位指令实现各相所
需的脉冲信号。需的脉冲信号。 例如在例如在 MW10MW10 中进行移位,每中进行移位,每
次移位的时间为次移位的时间为 11 秒钟。如图秒钟。如图为三相单六拍正向时序流程图,为三相单六拍正向时序流程图,三相单三拍可利用相同的流程三相单三拍可利用相同的流程图,从图,从 M11.1M11.1 开始移位,每次开始移位,每次移两位,而三相双三拍从移两位,而三相双三拍从 M11.M11.22 开始,每次移两位。 开始,每次移两位。

编程方法编程方法 在程序段在程序段 11 中,先产生周期为中,先产生周期为 11 秒钟的脉秒钟的脉
冲信号,如图所示: 冲信号,如图所示:

编程方法编程方法 在不同的工作方式下赋予在不同的工作方式下赋予 MW10MW10 不同的初不同的初
值,如图程序段值,如图程序段 2~42~4 所示 所示

编程方法编程方法 程序段程序段 22 :三相单三拍或三相单六拍工作:三相单三拍或三相单六拍工作
方式,此时均从方式,此时均从 M11.0M11.0 开始移位,两种工开始移位,两种工作方式均为作方式均为 M11.6M11.6 为“为“ 1”1” 时返回。程序时返回。程序段段 33 :三相双三拍工作方式,此时从:三相双三拍工作方式,此时从 M11.M11.11 开始因为,而在开始因为,而在 M11.7M11.7 时返回。程序段时返回。程序段44 :若按下停止按钮或没有选择工作方式时,:若按下停止按钮或没有选择工作方式时,MW10MW10 中的内容为“中的内容为“ 0”0” ,则不会有输出。,则不会有输出。

编程方法编程方法 在不同的工作方式下,将移位指令移动的在不同的工作方式下,将移位指令移动的
位数保存在位数保存在 MW20MW20 中,程序如图所示 中,程序如图所示

编程方法编程方法 程序段程序段 55 :三相单三拍或三相双六拍,每:三相单三拍或三相双六拍,每
次应移动次应移动 22 位。程序段位。程序段 66 :三相单六拍,:三相单六拍,每次应移动一位。程序段每次应移动一位。程序段 77 为移位指令,为移位指令,由于由于 T1T1 的周期为的周期为 11 秒钟,因此每间隔秒钟,因此每间隔 11 秒秒钟,移位指令左移指定的位数。再将钟,移位指令左移指定的位数。再将 MW1MW100 中对应的位控制相应的输出,可实现步进中对应的位控制相应的输出,可实现步进电机的控制。步进电机的反向控制可根据电机的控制。步进电机的反向控制可根据相同的办法来实现。相同的办法来实现。

西门子西门子 PLCPLC 与步进电机驱动器控制步与步进电机驱动器控制步进电机进电机
在对步进电机进行控制时,常常会采用步在对步进电机进行控制时,常常会采用步进电机驱动器对其进行控制。步进电机驱进电机驱动器对其进行控制。步进电机驱动器采用超大规模的硬件集成电路,具有动器采用超大规模的硬件集成电路,具有高度的抗干扰性以及快速的响应性,不易高度的抗干扰性以及快速的响应性,不易出现死机或丢步现象。使用步进电机驱动出现死机或丢步现象。使用步进电机驱动器控制步进电机,可以不考虑各相的时序器控制步进电机,可以不考虑各相的时序问题(由驱动器处理),只要考虑输出脉问题(由驱动器处理),只要考虑输出脉冲的频率(控制驱动器冲的频率(控制驱动器 CPCP 端),以及步进端),以及步进电机的方向(控制驱动器的电机的方向(控制驱动器的 DIRDIR 端)。端)。 PLPLCC 的控制程序也简单得多。的控制程序也简单得多。

西门子西门子 PLCPLC 与步进电机驱动器控制步与步进电机驱动器控制步进电机进电机
但是,在使用步进电机驱动器时,往往需但是,在使用步进电机驱动器时,往往需要较高频率的脉冲。因此要较高频率的脉冲。因此 PLCPLC 是否能产生是否能产生高频脉冲成为能否成功控制步进电机驱动高频脉冲成为能否成功控制步进电机驱动器以及步进电机的关键。西门子器以及步进电机的关键。西门子 CPU312CCPU312C 、、CPU313CCPU313C 、、 CPU313-2DPCPU313-2DP 等型号,集成等型号,集成有用于高速计数以及高频脉冲输出的通道,有用于高速计数以及高频脉冲输出的通道,可用于高速计数或高频脉冲输出。可用于高速计数或高频脉冲输出。

西门子西门子 PLCPLC 与步进电机驱动器控制步与步进电机驱动器控制步进电机进电机
下面以下面以 CPU313CCPU313C 为例,说明高频脉冲输出的控为例,说明高频脉冲输出的控制过程。制过程。
CPU313CCPU313C集成有集成有 33 个用于高速计数或高频脉冲输个用于高速计数或高频脉冲输出的特殊通道,出的特殊通道, 33 个通道位于个通道位于 CPU313CCPU313C集成数集成数字量输出点首位字节的最低三位,这三位通常情字量输出点首位字节的最低三位,这三位通常情况下可以作为普通的数字量输出点来使用。再需况下可以作为普通的数字量输出点来使用。再需要高频脉冲输出时,可通过硬件设置定义这三位要高频脉冲输出时,可通过硬件设置定义这三位的属性,将其作为高频脉冲输出通道来使用。 的属性,将其作为高频脉冲输出通道来使用。

西门子西门子 PLCPLC 与步进电机驱动器控制步与步进电机驱动器控制步进电机进电机
作为普通数字量输出点使用时,其系统默作为普通数字量输出点使用时,其系统默认地址为认地址为 Q124.0Q124.0 、、 Q124.1Q124.1 、、 Q124.2Q124.2(该地址用户可根据需要自行修改),作(该地址用户可根据需要自行修改),作为高速脉冲输出时,对应的通道分别为为高速脉冲输出时,对应的通道分别为 00通道、通道、 11 通道、通道、 22 通道(通道号为固定值,通道(通道号为固定值,用户不能自行修改)。每一通道都可输出用户不能自行修改)。每一通道都可输出最高频率为最高频率为 2.5KHZ2.5KHZ (周期为(周期为 0.4ms0.4ms )的)的高频脉冲。 高频脉冲。

西门子西门子 PLCPLC 与步进电机驱动器控制步与步进电机驱动器控制步进电机进电机
如图所示:如图所示: CPU313CCPU313C 中,中, X2X2 前接线端子前接线端子2222 、、 2323 、、 2424 号接线端子分别对应通道号接线端子分别对应通道 00 、、通道通道 11 、和通道、和通道 33 。另外,每个通道都有。另外,每个通道都有自己的硬件控制门,自己的硬件控制门, 00 通道的硬件门对应通道的硬件门对应X2X2 前接线端子的前接线端子的 44 号接线端子,对应的输号接线端子,对应的输入点默认地址为入点默认地址为 I124.2I124.2 。。 11 通道硬件门通道硬件门 77号接线端子,对应的输入点默认地址为号接线端子,对应的输入点默认地址为 I12I124.54.5 ,而,而 22 号通道硬件门为号通道硬件门为 1212 号接线端子,号接线端子,对应的输入点默认地址为对应的输入点默认地址为 I125.0I125.0 。 。

西门子西门子 PLCPLC 与步进电机驱动器控制步与步进电机驱动器控制步进电机进电机

西门子西门子 PLCPLC 与步进电机驱动器控制步与步进电机驱动器控制步进电机进电机
控制通道产生高频脉冲分为以下两个步骤 控制通道产生高频脉冲分为以下两个步骤 硬件设置。硬件设置。 调用系统功能块调用系统功能块 SFB49SFB49 。。

11.硬件设置.硬件设置 要想使这三个通道输出高频脉冲,首先必要想使这三个通道输出高频脉冲,首先必须进行硬件设置。硬件设置的过程如下: 须进行硬件设置。硬件设置的过程如下:
(( 11 )首先创建一个项目,)首先创建一个项目, CPUCPU型号选择型号选择为为 CPU313CCPU313C ,如图所示 ,如图所示

11.硬件设置.硬件设置 (( 22 )双击)双击 SIMATIC 300 StationSIMATIC 300 Station 下的下的 haha
rdwarerdware 进入硬件组态工具软件进行硬件设进入硬件组态工具软件进行硬件设置如图所示。 置如图所示。

11.硬件设置.硬件设置 在硬件组态工具中可以看到在硬件组态工具中可以看到 CPU313CCPU313C 集成集成
有有 2424 点数字量输入(点数字量输入( DI24DI24 )、)、 1616 点数字点数字量输出(量输出( DO16DO16 )、)、 55 通道模拟量输入通道模拟量输入(( AI5AI5 )和)和 22 通道的模拟量输出(通道的模拟量输出( AO2AO2 )。)。另外还有计数功能(另外还有计数功能( countcount ),高频脉冲),高频脉冲的属性设置就在的属性设置就在 countcount 中设置。这里的计中设置。这里的计数器是针对计数频率要求较高的场合。双数器是针对计数频率要求较高的场合。双击击 countcount (如图(如图 5.3.115.3.11 所示),可进行高所示),可进行高速计数、频率控制以及高频脉冲输出属性速计数、频率控制以及高频脉冲输出属性设置对话框。 设置对话框。

11.硬件设置.硬件设置 (( 33 )双击)双击 countcount 可进入计数器属性对话可进入计数器属性对话框如图所示 框如图所示
3 通道:以 30kHz 进行计数或频率测量,以 2.5kHz切换频率、计数频率进行脉宽调制

11.硬件设置.硬件设置 在对话框中, 在对话框中, ChanneChanne 为通道选择,在其为通道选择,在其后面下拉菜单中,可以选择要设置的通道后面下拉菜单中,可以选择要设置的通道号,号, CPU313CCPU313C 有三个通道号可以选择,既有三个通道号可以选择,既00 、、 11 、、 22 ,用户可以根据自己的需要对某,用户可以根据自己的需要对某个通道或三个通道进行分别设置。个通道或三个通道进行分别设置。 OperatiOperatingng 为工作模式,在其后面的下拉菜单中有为工作模式,在其后面的下拉菜单中有55 种工作模式可以选择(如上图所示)。 种工作模式可以选择(如上图所示)。

11.硬件设置.硬件设置 这里只介绍通道作为高频脉冲输出时的工这里只介绍通道作为高频脉冲输出时的工
作模式。要想在对应通道产生高频脉冲,作模式。要想在对应通道产生高频脉冲,必须选择最后一种工作模式:必须选择最后一种工作模式: Pulse-widtPulse-width modulationh modulation (脉宽调制)。在(脉宽调制)。在 ShortShort(简述)中可以看到,每个通道进行高速(简述)中可以看到,每个通道进行高速计数或频率测量时,最大频率可达计数或频率测量时,最大频率可达 30kHz30kHz ;;而作为高频脉冲输出时,最大频率为而作为高频脉冲输出时,最大频率为 2.5k2.5kHzHz 。。

11.硬件设置.硬件设置 选择选择 Pulse-width modulationPulse-width modulation 选项以后,选项以后,
将出现默认值设置对话框如下图所示将出现默认值设置对话框如下图所示

11.硬件设置.硬件设置 (( 44 )设置脉冲参数:在上图的对话框中)设置脉冲参数:在上图的对话框中
选择选择 OKOK ,对应通道被设置脉宽调制工作,对应通道被设置脉宽调制工作方式,脉冲参数将被设置为默认值。计数方式,脉冲参数将被设置为默认值。计数器属性对话框会出现一个新的标签,器属性对话框会出现一个新的标签, PulsPulse-Width Modulatione-Width Modulation 标签,选择此标签标签,选择此标签可对脉宽参数进行设置,如下图所示可对脉宽参数进行设置,如下图所示

11.硬件设置.硬件设置

11.硬件设置.硬件设置 Operating ParametersOperating Parameters (操作参数)中各参数意义如下:(操作参数)中各参数意义如下: ①①Output formatOutput format : : Per milePer mile ,, S7 analog valueS7 analog value 输出格式(输出格式( output-formatoutput-format )有两种选择,每密耳()有两种选择,每密耳( Per Per
milemile )和)和 S7S7模拟量值(模拟量值( S7 analog valueS7 analog value )。选择)。选择 Per Per milmil ,则输出格式取值范围为(,则输出格式取值范围为( 0~10000~1000 ),选择),选择 S7 anaS7 analog valuelog value ,则输出格式取值范围为(,则输出格式取值范围为( 0~276480~27648 ,, S7S7模模拟量的最大取值为拟量的最大取值为 2764827648 )。输出格式的取值在调用系统)。输出格式的取值在调用系统功能块功能块 SFB49SFB49 时设置的,这一取值将会影响输出脉冲的时设置的,这一取值将会影响输出脉冲的占空比,具体内容将在后面介绍占空比,具体内容将在后面介绍 SFB49SFB49 时提到。时提到。

11.硬件设置.硬件设置 ②②Time baseTime base: : 1ms1ms , , 0.1ms0.1ms 时基(时基( Time baseTime base )也有两种选择,用户可根据)也有两种选择,用户可根据
实际需要选择合适的时基,要产生频率较高的脉实际需要选择合适的时基,要产生频率较高的脉冲,可选择较短的时基(冲,可选择较短的时基( 0.1ms0.1ms )。)。
③③On-delayOn-delay:接通延时时间值:接通延时时间值 接通延时(接通延时( On-delayOn-delay )是指,当控制条件成立)是指,当控制条件成立
时,对应通道将延时指定时间后输出高频脉冲。时,对应通道将延时指定时间后输出高频脉冲。指定时间值为设置值指定时间值为设置值 ** 时基。取值范围为时基。取值范围为 0~65530~655355

11.硬件设置.硬件设置 ④④PeriodPeriod:指定输出脉冲的周期。取值范围为:指定输出脉冲的周期。取值范围为 44
~65535~65535 周期为设置值周期为设置值 ** 时基。时基。 ⑤⑤Minimum pulseMinimum pulse:指定最小的脉冲宽度:指定最小的脉冲宽度 指定输出脉冲的最小脉宽,最小脉宽的取值范围指定输出脉冲的最小脉宽,最小脉宽的取值范围
为为 2~Period/22~Period/2 。注意:在指定了最小脉冲宽度以。注意:在指定了最小脉冲宽度以后,应该保证根据占空比计算出来的高低电平的后,应该保证根据占空比计算出来的高低电平的时间不小于最小脉冲宽度,否则脉冲将不能正常时间不小于最小脉冲宽度,否则脉冲将不能正常输出。请参看系统功能块输出。请参看系统功能块 SFB49SFB49 使用方法。使用方法。

11.硬件设置.硬件设置 ⑥⑥Input Input : : Hardware gateHardware gate 通过输入参数选择是否采用硬件门控制,通过输入参数选择是否采用硬件门控制,
如果选中硬件门前面的方框,则高频脉冲如果选中硬件门前面的方框,则高频脉冲的控制需要硬件门和软件门同时控制,如的控制需要硬件门和软件门同时控制,如果不选,则高频脉冲输出单独由软件门控果不选,则高频脉冲输出单独由软件门控制。具体控制控制方法将在后面的制。具体控制控制方法将在后面的 SFB49SFB49介绍中提到。 介绍中提到。

11.硬件设置.硬件设置 ⑦⑦Hardware InterruptHardware Interrupt :: Hardware gatHardware gat
e openinge opening 硬件中断选择,一旦选中硬件门控制以后,硬件中断选择,一旦选中硬件门控制以后,
此选项将被激活,用户可根据需要选择是此选项将被激活,用户可根据需要选择是否在硬件门起动时刻,调用硬件中断组织否在硬件门起动时刻,调用硬件中断组织块块 OB40OB40 中的程序。中的程序。

11.硬件设置.硬件设置 将通道的硬件参数设置好以后,按将通道的硬件参数设置好以后,按 OKOK键,如果键,如果还需要设置其它通道,可以再次双击还需要设置其它通道,可以再次双击 countcount ,重,重新进入计数器属性对话框对其它通道进行设置。新进入计数器属性对话框对其它通道进行设置。将组态好的硬件数据进行保存编译(将组态好的硬件数据进行保存编译( save and csave and compileompile ),并下载到),并下载到 PLCPLC 中,完成硬件设置工中,完成硬件设置工作。作。
要想在相应的通道上获得脉冲,除了硬件设置以要想在相应的通道上获得脉冲,除了硬件设置以外,还必须在程序中调用产生脉冲的系统功能块外,还必须在程序中调用产生脉冲的系统功能块SFB49SFB49 (符号名为“(符号名为“ PULSE”PULSE” )。)。

22.调用系统功能块.调用系统功能块 SFB49SFB49 (( 11 )选中项目下最后一级子菜单)选中项目下最后一级子菜单 BlocksBlocks ,,并双击并双击 BlocksBlocks 中的中的 OB1OB1 进入程序编辑器,进入程序编辑器,在在 OB1OB1 中,调用中,调用 SFB49SFB49 。过程如下:在指。过程如下:在指令集工具中,找到令集工具中,找到 librarylibrary (库)(库) ->stand->standard libraryard library (标准库)(标准库) ->system Functio->system Function Blocksn Blocks (系统功能块)菜单,并双击该(系统功能块)菜单,并双击该菜单下的系统功能块菜单下的系统功能块 SFB49SFB49 进行调用进行调用

22.调用系统功能块.调用系统功能块 SFB49SFB49 如图所示 如图所示

22.调用系统功能块.调用系统功能块 SFB49SFB49 在使用系统功能块时,必须指定其背景数在使用系统功能块时,必须指定其背景数据块。如上图,在红色问号处,指定据块。如上图,在红色问号处,指定 SFB4SFB499 的背景数据块(例如:的背景数据块(例如: DB1DB1 、、 DB2DB2 )。)。如背景数据还未建立,填写数据块后(如如背景数据还未建立,填写数据块后(如填填 DB10DB10 ),则程序编辑器将自动建立),则程序编辑器将自动建立 DBDB1010 为为 SB49SB49 的背景数据块。的背景数据块。

22.调用系统功能块.调用系统功能块 SFB49SFB49 (( 22 )分配系统功能块)分配系统功能块 SFB49SFB49 的参数。的参数。 系统功能块系统功能块 SB49SB49 的参数很多,在使用时,的参数很多,在使用时,
用户可根据自己的控制需要进行选择性填用户可根据自己的控制需要进行选择性填写。其各个参数意义如下表所示写。其各个参数意义如下表所示

22.调用系统功能块.调用系统功能块 SFB49SFB49输入参数输入参数 数据数据
类型类型地址地址
DDBB
说明说明 取值范取值范围围
缺省值缺省值
LADDRLADDR WORDWORD 00 子模块的子模块的 I/OI/O 地址,由用地址,由用户在户在 "HW"HW 配置配置 "" 中中指定。如果指定。如果 II 和和 QQ 地地址不相等,则必须指址不相等,则必须指定二者中较低的一个。定二者中较低的一个。
CPUCPU 专专用用
W#16#30W#16#3000
CHANNECHANNELL
INTINT 22 指定的通道号指定的通道号CPU312CCPU312C ::CPU313CCPU313C ::CPU314CCPU314C ::
00 到到 1100 到到 220 0 到到 33
00
SW_ENSW_EN BOOLBOOL 4.04.0 软件门:控制脉冲输出软件门:控制脉冲输出 TRUE/TRUE/FALSEFALSE
FALSEFALSE
MAN_DOMAN_DO BOOLBOOL 4.14.1 手动输出控制使能手动输出控制使能 TRUE/TRUE/FALSEFALSE
FALSEFALSE
SET_DOSET_DO BOOLBOOL 4.24.2 控制输出控制输出 TRUE/TRUE/FALSEFALSE
FALSEFALSE

22.调用系统功能块.调用系统功能块 SFB49SFB49OUTP_VOUTP_V
ALALINTINT 6.06.0 输出值设置输出值设置
输出格式为输出格式为 PPer miler mil 时:时:
0 ~ 1,0000 ~ 1,000输出格式位输出格式位
为为 S7 analog valueS7 analog value 时:时: 00~27,648~27,648
0~10000~10000~276480~27648
00
JOB_REQJOB_REQ BOOLBOOL 8.08.0 作业初始化控制端(上作业初始化控制端(上升沿有效)升沿有效)
TRUE/TRUE/FALSEFALSE
FALSEFALSE
JOB_IDJOB_ID WORDWORD 1010 作业号作业号W#16#0=W#16#0= 无功能作业无功能作业W#16#1=W#16#1= 写周期写周期W#16#2=W#16#2= 写延时时间写延时时间W#16#4=W#16#4= 写最小脉冲周写最小脉冲周期期
W#16#81=W#16#81= 读周期读周期W#16#82=W#16#82= 读延时时间读延时时间W#16#84=W#16#84= 读最小脉冲周读最小脉冲周期期
W#16#0 W#16#0 W#16#1W#16#1W#16#2W#16#2W#16#4 W#16#4 W#16#8W#16#8
1 1 W#16#8W#16#8
2 2 W#16#8W#16#8
4 4
W#16#0 W#16#0
JOB_VALJOB_VAL DINTDINT 1212 写作业的值写作业的值 ((设置值乘以设置值乘以时基为实际时间值时基为实际时间值 ))
-2-23131 至至 ++223131-1-1
L#0L#0

22.调用系统功能块.调用系统功能块 SFB49SFB49
输出参数输出参数 数据数据类型类型
地址地址DDBB
说明说明 取值范围取值范围 缺省值缺省值
STS_ENSTS_EN BOOLBOOL 16.16.00状态使能端状态使能端 TRUE/TRUE/
FALSEFALSEFALSEFALSE
STS_STRSTS_STRTT
BOOLBOOL 16.16.11硬件门的状态(开始输硬件门的状态(开始输
入)入)TRUE/TRUE/
FALSEFALSEFALSEFALSE
STS_DOSTS_DO BOOLBOOL 16.216.2 输出状态输出状态 TRUE/TRUE/FALSEFALSE
FALSEFALSE
JOB_DOJOB_DONENE
BOOLBOOL 16.316.3 可以启动新作业可以启动新作业 TRUE/TRUE/FALSEFALSE
TRUETRUE
JOB_ERRJOB_ERR BOOLBOOL 16.416.4 故障作业故障作业 RUE/FALSERUE/FALSE FALSEFALSE
JOB_STAJOB_STATT
WORDWORD 1818 作业错误号作业错误号 W#16#0000W#16#0000至至 W#16W#16#FFFF#FFFF
W#16#0W#16#0

22.调用系统功能块.调用系统功能块 SFB49SFB49 在在 SFB49SFB49 的所有输入参数中主要有两部分,的所有输入参数中主要有两部分,
一部分是用来控制脉冲输出或作为数字量一部分是用来控制脉冲输出或作为数字量输出的控制变量;另外一部分则是用来修输出的控制变量;另外一部分则是用来修改脉冲参数:例如脉冲周期,延时时间,改脉冲参数:例如脉冲周期,延时时间,最小脉宽等。最小脉宽等。

22.调用系统功能块.调用系统功能块 SFB49SFB49 参数参数 LADDRLADDR :子模块的地址,数据类型:子模块的地址,数据类型
为字。可在硬件组态时进行地址配置。其为字。可在硬件组态时进行地址配置。其默认值为默认值为 W#16#300W#16#300 ,即输入输出映像区,即输入输出映像区第第 768768 个字节。若通道集成在个字节。若通道集成在 CPUCPU模块中,模块中,则此参数可以不用设置,若通道在某个子则此参数可以不用设置,若通道在某个子功能模块上,则必须保证此参数的地址与功能模块上,则必须保证此参数的地址与模块设置的地址一致。模块设置的地址一致。

22.调用系统功能块.调用系统功能块 SFB49SFB49 参数参数 CHANNELCHANNEL :通道号,数据类型为整:通道号,数据类型为整
数。此参数指定启用的通道号,数。此参数指定启用的通道号, CPU313CCPU313C具有具有 33 个通道的高频脉冲输出,通道号分个通道的高频脉冲输出,通道号分别为别为 00 、、 11 、、 22 。如启动。如启动 22 号通道,则参号通道,则参数值为:数值为: 22 。若通道号大于。若通道号大于 22 ,则在执行,则在执行功能块时,将发出出错信息。 功能块时,将发出出错信息。

22.调用系统功能块.调用系统功能块 SFB49SFB49 参数参数 SW_ENSW_EN :为软件控制门,数据类型:为软件控制门,数据类型
为为 BOOLBOOL 。。 SFB49SFB49 是通过门功能(是通过门功能( Gate Gate FunctionFunction )控制高频脉冲的起动输出的。)控制高频脉冲的起动输出的。门功能中包括硬件门(门功能中包括硬件门( hardware gatehardware gate ))和软件门(和软件门( software gatesoftware gate )两种:可根)两种:可根据需要设置为单独使用软件门控制或同时据需要设置为单独使用软件门控制或同时使用硬件门和软件门控制。门功能工作过使用硬件门和软件门控制。门功能工作过程如下图所示 程如下图所示

22.调用系统功能块.调用系统功能块 SFB49SFB49

22.调用系统功能块.调用系统功能块 SFB49SFB49 单独使用软件门控制时,在硬件设置时,单独使用软件门控制时,在硬件设置时,
不能启用硬件门(不能启用硬件门( hardware gatehardware gate )控制。)控制。此时,高频脉冲输出单独由软件门此时,高频脉冲输出单独由软件门 SW_ENSW_EN端控制,即端控制,即 SW_ENSW_EN 端为“端为“ 1”1” 时,脉冲时,脉冲输出指令开始执行(延时指定时间后输出输出指令开始执行(延时指定时间后输出指定周期和脉宽的高频脉冲),当指定周期和脉宽的高频脉冲),当 SW_ENSW_EN端为“端为“ 0”0” 时,高频脉冲停止输出。 时,高频脉冲停止输出。

22.调用系统功能块.调用系统功能块 SFB49SFB49 采用硬件门和软件门同时控制时,需要在硬件设采用硬件门和软件门同时控制时,需要在硬件设
置中,启用硬件门控制。当软件门的状态先为置中,启用硬件门控制。当软件门的状态先为““ 1”1” ,同时在硬件门有一个上升沿时,将启动,同时在硬件门有一个上升沿时,将启动内部门功能,并输出高频脉冲(延时指定时间输内部门功能,并输出高频脉冲(延时指定时间输出高频脉冲)。当硬件门的状态先为“出高频脉冲)。当硬件门的状态先为“ 1”1” ,而,而软件门的状态后变为“软件门的状态后变为“ 1”1” ,则门功能不启动,,则门功能不启动,若软件的状态保持“若软件的状态保持“ 1”1” ,同时在硬件门有一个,同时在硬件门有一个下降沿发生,也能启动门功能,输出高频脉冲。下降沿发生,也能启动门功能,输出高频脉冲。当软件门的状态变为“当软件门的状态变为“ 0”0” ,无论硬件门的状态,无论硬件门的状态如何,将停止脉冲输出。 如何,将停止脉冲输出。

22.调用系统功能块.调用系统功能块 SFB49SFB49 参数参数 MAN_DOMAN_DO:手动输出使能端。一旦通道在:手动输出使能端。一旦通道在硬件组态时设置为脉宽调制功能,则该通道不能硬件组态时设置为脉宽调制功能,则该通道不能使用普通的输出线圈指令对其进行写操作控制,使用普通的输出线圈指令对其进行写操作控制,要想控制该通道必须调用功能块要想控制该通道必须调用功能块 SFB49SFB49 对其进行对其进行控制。如果还想在该通道得到持续的高电平(非控制。如果还想在该通道得到持续的高电平(非脉冲信号),则可以通过脉冲信号),则可以通过 MAN_DOMAN_DO 控制端实现。控制端实现。当当 MAN_DOMAN_DO端为“端为“ 1”1” 时,指定通道不能输出时,指定通道不能输出高频脉冲,只能作为数字量输出点使用。当高频脉冲,只能作为数字量输出点使用。当 MAMAN_DON_DO端为“端为“ 0”0” 时,则指定通道只能作为高频时,则指定通道只能作为高频脉冲输出通道使用输出指定频率的脉冲信号。脉冲输出通道使用输出指定频率的脉冲信号。

22.调用系统功能块.调用系统功能块 SFB49SFB49 参数参数 SET_DOSET_DO :数字量输出控制端。当:数字量输出控制端。当 MM
AN_DOAN_DO 端的状态为“端的状态为“ 1”1” 时,可通过时,可通过 SESET_DO T_DO 端控制指定通道的状态是为高电平端控制指定通道的状态是为高电平““ 1”1” ,还是低电平“,还是低电平“ 0”0” 。如果。如果 MAN_MAN_DODO端的状态为“端的状态为“ 0”0” ,则,则 SET_DOSET_DO 端的端的状态不起作用,不会影响通道的状态。状态不起作用,不会影响通道的状态。

22.调用系统功能块.调用系统功能块 SFB49SFB49 参数参数 OUTP_VALOUTP_VAL:输出值设置。输出值参数数:输出值设置。输出值参数数据类型为整数。在硬件设置中我们只指定了脉冲据类型为整数。在硬件设置中我们只指定了脉冲的周期,延时时间以及最小脉宽等,并没有指定的周期,延时时间以及最小脉宽等,并没有指定脉冲的占空比。参数脉冲的占空比。参数 OUTP_VALOUTP_VAL 就是用来指定就是用来指定脉冲占空比的。注意:在硬件设置时,如果选择脉冲占空比的。注意:在硬件设置时,如果选择输出形式(输出形式( Output-formatOutput-format )为:)为: Per milPer mil ,则,则OUTP_VALOUTP_VAL 取值范围为取值范围为 0~10000~1000 (基数为(基数为 10010000 ),输出脉冲高电平时间长度为:),输出脉冲高电平时间长度为:
Pulse widthPulse width (脉宽)(脉宽) == (( OUTP_VAL/1000OUTP_VAL/1000 ))*period*period (周期) (周期)

22.调用系统功能块.调用系统功能块 SFB49SFB49 例如:若例如:若 OUTP_VALOUTP_VAL 值设置为值设置为 200200 ,则一个周,则一个周期中,期中, 200/1000200/1000 的时间为高电平,的时间为高电平, 800/1000800/1000 的的时间为低电平:即占空比为时间为低电平:即占空比为 11:: 44 。。
如果硬件设置时,选择输出形式(如果硬件设置时,选择输出形式( output-formoutput-formatat )为)为 S7S7模拟量值(模拟量值( S7 analog valueS7 analog value ),则),则 OOUTP_VALUTP_VAL 取值范围为取值范围为 0~276480~27648 (基数为(基数为 2764276488 ),此时输出脉冲的脉宽为:),此时输出脉冲的脉宽为:
Pulse widthPulse width (脉宽)(脉宽) == (( OUTP_VAL/2764OUTP_VAL/276488 )) * period* period (周期)(周期)

22.调用系统功能块.调用系统功能块 SFB49SFB49 此时如果此时如果 OUTP_VALOUTP_VAL 值设置为值设置为 200200 ,则一个周,则一个周期中期中 200/27648200/27648 的时间为高电平,的时间为高电平, 27448/2764827448/27648的时间为低电平。的时间为低电平。
注意在设置占空比时,应该保证计算出的高低电注意在设置占空比时,应该保证计算出的高低电平的时间都不能小于硬件设置中指定的最小脉宽平的时间都不能小于硬件设置中指定的最小脉宽值(值( Minimum pulse widthMinimum pulse width ),否则将不能输),否则将不能输出脉冲信号。出脉冲信号。
以上参数为控制脉冲的操作信号。如果想要修改以上参数为控制脉冲的操作信号。如果想要修改硬件设置时,如脉冲周期,延时时间等参数,则硬件设置时,如脉冲周期,延时时间等参数,则要通过下面的参数来完成。要通过下面的参数来完成。

22.调用系统功能块.调用系统功能块 SFB49SFB49 参数参数 JOB_REQJOB_REQ :为作业操作信号,通过:为作业操作信号,通过
作业操作可以修改硬件设置时指定的某些作业操作可以修改硬件设置时指定的某些参数如延时时间,周期,最小脉宽等的。参数如延时时间,周期,最小脉宽等的。作业初始化控制端是上升沿有效,当作业初始化控制端是上升沿有效,当 JOB_JOB_REQREQ 端的状态由“端的状态由“ 0”0” 变为“变为“ 1”1” 时将进时将进行作业操作功能,具体事件由作业行作业操作功能,具体事件由作业 IDID 和作和作业值决定。业值决定。

22.调用系统功能块.调用系统功能块 SFB49SFB49
参数参数 JOB_IDJOB_ID:为作业号,作业号决定了具体的:为作业号,作业号决定了具体的作业事件,例如,如果想修改脉冲周期则可指定作业事件,例如,如果想修改脉冲周期则可指定 JJOB_IDOB_ID 号为号为 W#16#1W#16#1 ,如果想修改延时时间则可,如果想修改延时时间则可指定指定 JOB_IDJOB_ID 的参数为的参数为 W#16#2W#16#2 。如果想读取周。如果想读取周期,则指定期,则指定 JOB_IDJOB_ID 号为号为 W#16#81W#16#81 。在系统功。在系统功能能 SFB49SFB49 的背景数据块中,有一个静态变量:的背景数据块中,有一个静态变量: JJOB_OVALOB_OVAL ,如图所示,变量类型为双整数,,如图所示,变量类型为双整数, SFSFB49B49 进行读作业操作时,将把读取的值放在这一进行读作业操作时,将把读取的值放在这一区域,用户可访问这一区域得到高频脉冲相关参区域,用户可访问这一区域得到高频脉冲相关参数的值。数的值。

22.调用系统功能块.调用系统功能块 SFB49SFB49

22.调用系统功能块.调用系统功能块 SFB49SFB49 参数参数 JOB_VALJOB_VAL :为写作业的值,参数类:为写作业的值,参数类型为双整数,指定的值乘以硬件组态时指型为双整数,指定的值乘以硬件组态时指定的时基为定义的时间值。当定的时基为定义的时间值。当 JOB_REQJOB_REQ有上升沿发生时,有上升沿发生时, JOB_VALJOB_VAL 端定义的值端定义的值将代替脉冲原有的参数。将代替脉冲原有的参数。

22.调用系统功能块.调用系统功能块 SFB49SFB49 系统功能块系统功能块 SFB49SFB49 (符号名为(符号名为 PLUSEPLUSE ))
输出参数意义如下表所示 输出参数意义如下表所示

22.调用系统功能块.调用系统功能块 SFB49SFB49
输出参数输出参数 数据数据类型类型
地址地址DDBB
说明说明 取值范围取值范围 缺省值缺省值
STS_ENSTS_EN BOOLBOOL 16.16.00状态使能端状态使能端 TRUE/TRUE/
FALSEFALSEFALSEFALSE
STS_STRSTS_STRTT
BOOLBOOL 16.16.11硬件门的状态(开始输硬件门的状态(开始输
入)入)TRUE/TRUE/
FALSEFALSEFALSEFALSE
STS_DOSTS_DO BOOLBOOL 16.216.2 输出状态输出状态 TRUE/TRUE/FALSEFALSE
FALSEFALSE
JOB_DOJOB_DONENE
BOOLBOOL 16.316.3 可以启动新作业可以启动新作业 TRUE/TRUE/FALSEFALSE
TRUETRUE
JOB_ERRJOB_ERR BOOLBOOL 16.416.4 故障作业故障作业 RUE/FALSERUE/FALSE FALSEFALSE
JOB_STAJOB_STATT
WORDWORD 1818 作业错误号作业错误号 W#16#0000W#16#0000至至 W#16W#16#FFFF#FFFF
W#16#0W#16#0

22.调用系统功能块.调用系统功能块 SFB49SFB49 参数参数 STS_ENSTS_EN :状态使能端。其状态显示:状态使能端。其状态显示
高频脉冲输出的条件是否成立,当高频脉冲输出的条件是否成立,当 STS_ESTS_ENN 端的状态为“端的状态为“ 1”1” 时,表示高频脉冲输时,表示高频脉冲输出条件成立,通道处于延时或输出状态。出条件成立,通道处于延时或输出状态。
参数参数 STS_STRTSTS_STRT :硬件门状态。无论是否:硬件门状态。无论是否启动硬件门功能,参数启动硬件门功能,参数 STS_STRTSTS_STRT 的状态的状态与通道对应的硬件门的状态一致。与通道对应的硬件门的状态一致。

22.调用系统功能块.调用系统功能块 SFB49SFB49 参数参数 STS_DOSTS_DO :为通道的输出状态,当通:为通道的输出状态,当通道作为数字量输出或高频脉冲输出时,道作为数字量输出或高频脉冲输出时, STSTS_DOS_DO端的状态与通道输出的状态一致。端的状态与通道输出的状态一致。

22.调用系统功能块.调用系统功能块 SFB49SFB49 参数参数 JOB_DONEJOB_DONE:为可以启动新作业的端,正:为可以启动新作业的端,正
常情况下常情况下 JOB_DONEJOB_DONE端的状态为“端的状态为“ 1”1” ,表示,表示可以启动新作业;当可以启动新作业;当 JOB_REQJOB_REQ端有上升沿时,端有上升沿时,将执行指定作业修改对应参数,这时将执行指定作业修改对应参数,这时 JOB_DONEJOB_DONE的状态将变为“的状态将变为“ 0”0” ,当作业执行完毕,参数修,当作业执行完毕,参数修改好以后,改好以后, JOB_DONEJOB_DONE 的状态将自动恢复为的状态将自动恢复为““ 1”1”状态。注意,一般作业执行的时间很短,状态。注意,一般作业执行的时间很短,因此因此 JOB_DONEJOB_DONE 为“为“ 0”0” 的状态时间也很短。的状态时间也很短。在做实验时用肉眼很难观察到在做实验时用肉眼很难观察到 JOB_DONEJOB_DONE端的端的状态变化,可以在程序中用状态变化,可以在程序中用 JOB_DONEJOB_DONE 输出的输出的信号控制一个加法计数器,可以看到,作业每启信号控制一个加法计数器,可以看到,作业每启动一次,计数器的值都会加动一次,计数器的值都会加 11 ,证明在执行作业,证明在执行作业时,时, JOB_DONEJOB_DONE端的状态的确发生过变化。端的状态的确发生过变化。

22.调用系统功能块.调用系统功能块 SFB49SFB49 参数参数 JOB_ERRJOB_ERR :为故障作业,当:为故障作业,当 JOB_EJOB_E
RRRR 的状态为“的状态为“ 0”0” 时,表示作业执行正常,时,表示作业执行正常,当当 JOB_ERRJOB_ERR 的状态为“的状态为“ 1”1” 时,表示有时,表示有故障发生,具体故障原因可查看故障代码故障发生,具体故障原因可查看故障代码(由(由 JOB_STATJOB_STAT端读取)端读取)
参数参数 JOB_STATJOB_STAT:为作业错误代码。如果:为作业错误代码。如果发生作业错误,则发生作业错误,则 JOB_ERR = TRUEJOB_ERR = TRUE 。。 JJOB_STATOB_STAT 中将给出精确的错误原因。具体中将给出精确的错误原因。具体如下表所示 如下表所示

22.调用系统功能块.调用系统功能块 SFB49SFB49事件类别错误代码事件类别错误代码 解释解释
W#16#0411W#16#0411 周期过短。周期过短。
W#16#0412W#16#0412 周期过长。周期过长。
W#16#0421W#16#0421 延时过短。延时过短。
W#16#0422W#16#0422 延时过长。延时过长。
W#16#0431W#16#0431 最小脉冲周期过短。最小脉冲周期过短。
W#16#0432W#16#0432 最小脉冲周期过长。最小脉冲周期过长。
W#16#04FFW#16#04FF 作业号非法。作业号非法。

22.调用系统功能块.调用系统功能块 SFB49SFB49 发生系统错误后,事件类别错误代码解释发生系统错误后,事件类别错误代码解释
如下:如下: W#16#8001W#16#8001 操作模式错误或参数错误。操作模式错误或参数错误。
在“组态硬件”中设置正确的操作模式,在“组态硬件”中设置正确的操作模式,或使用与已设置的操作模式相匹配的或使用与已设置的操作模式相匹配的 SFBSFB 。。
W#16#8009W#16#8009 通道号非法。例如:将通道通道号非法。例如:将通道号设置值号设置值 >3 (CPU>3 (CPU 的专用值的专用值 )) 。。

高频脉冲输出控制举例 高频脉冲输出控制举例 控制要求:使用西门子控制要求:使用西门子 PLCPLC ,在,在 CPU313CPU313
CC模块的模块的 00 通道通过软件门单独控制,产通道通过软件门单独控制,产生周期为生周期为 20MS20MS ,占空比为,占空比为 11 :: 44 ,最小,最小脉宽为脉宽为 1MS1MS 的高频脉冲,延时时间为的高频脉冲,延时时间为 22 秒秒钟。在钟。在 11 通道通过硬件门和软件门同时控通道通过硬件门和软件门同时控制产生周期为制产生周期为 44 秒钟,占空比为秒钟,占空比为 11 :: 33 ,,最小脉宽为最小脉宽为 500MS500MS 的高频脉冲,延时时间的高频脉冲,延时时间为为 00 秒钟。硬件门打开时不调用硬件中断秒钟。硬件门打开时不调用硬件中断组织块。 组织块。

高频脉冲输出控制举例高频脉冲输出控制举例 11 .进行硬件设置:.进行硬件设置: ①① 创建项目(取名为高频脉冲输出练习),创建项目(取名为高频脉冲输出练习),
选择选择 CPUCPU型号为型号为 CPU313CCPU313C ②② 打开该项目中的硬件组态工具并双击打开该项目中的硬件组态工具并双击 coco
untunt 进行属性进行属性 --计数器话框。计数器话框。 ③③ 在属性在属性 --计数对话框中选择 计数对话框中选择 channel channel ::
00 ,, operatingoperating :: pulse Width modulatipulse Width modulationon ,并在弹出的对话框中选择,并在弹出的对话框中选择 OKOK键进行键进行确定。确定。

高频脉冲输出控制举例高频脉冲输出控制举例 ④④选择最后一个标签选择最后一个标签 pulse width modulationpulse width modulation
(脉宽调制标签)并进行(脉宽调制标签)并进行 operation parameteroperation parameter(操作参数)设置: (操作参数)设置: Output formatOutput format (输出格(输出格式):选择式):选择 per mileper mile
time basetime base (时基):选择(时基):选择 0.1ms0.1ms On-delayOn-delay (接通延时):(接通延时): 2000020000 periodperiod (周期): (周期): 200200 Minimum pulse periodMinimum pulse period (最小脉宽):(最小脉宽): 1010 输入参数选择时,不选硬件门输入参数选择时,不选硬件门

高频脉冲输出控制举例高频脉冲输出控制举例 设置效果如图所示 设置效果如图所示

高频脉冲输出控制举例高频脉冲输出控制举例 ⑤⑤ 按按 OKOK键确认设置,并再次双击键确认设置,并再次双击 countcount设置通道设置通道 11 。过程与步骤。过程与步骤 CC 、、 DD 相同,相同,设置效果如图所示:设置效果如图所示:

高频脉冲输出控制举例高频脉冲输出控制举例 ⑥⑥ 按按 OKOK键确认设置,并双击键确认设置,并双击 DI24/DO1DI24/DO1
66 将将 CPU313CCPU313C 自带的输入输出点的地址自带的输入输出点的地址由系统默认的由系统默认的 124124 字节开始,修改为从字节开始,修改为从 00字节开始,修改效果如图所示:字节开始,修改效果如图所示:

高频脉冲输出控制举例高频脉冲输出控制举例 ⑦⑦ 对硬件设置进行保存编译(对硬件设置进行保存编译( save and save and
compilecompile )和下载()和下载( downloaddownload )。完)。完成硬件设置。成硬件设置。

高频脉冲输出控制举例高频脉冲输出控制举例 22 .编写程序调用系统功能块.编写程序调用系统功能块 SFB49SFB49 ①①打开组织块打开组织块 OB1OB1 ,在,在 library->standard librlibrary->standard libr
ary->system Function Blocksary->system Function Blocks 菜单下双击菜单下双击 SFBSFB4949 进行调用(调用两次,进行调用(调用两次, 00 通道和通道和 11 通道。通道。
②②为两个为两个 SFB49SFB49 分别指定背景数据块分别指定背景数据块 DB1DB1 和和 DDB2B2 (如果数据块不存在,程序编辑器将自动产生(如果数据块不存在,程序编辑器将自动产生数据块中的变量,使其与数据块中的变量,使其与 SFB49SFB49 的参数保持一致,的参数保持一致,成为成为 SFB49SFB49 的背景数据块)。的背景数据块)。

高频脉冲输出控制举例高频脉冲输出控制举例 ③③ 对对 SFB49SFB49 参数进行设置,结果如图所示:参数进行设置,结果如图所示:

高频脉冲输出控制举例高频脉冲输出控制举例 ④④ 对程序进行保存,下载组织块对程序进行保存,下载组织块 OB1OB1 和指和指
定的数据块定的数据块 DB1DB1 、、 DB2DB2 到到 PLCPLC 。。 注意由于数据块是用户据需要设置的,因注意由于数据块是用户据需要设置的,因
此在使用时必须先下载到此在使用时必须先下载到 PLCPLC 中,否则在中,否则在执行程序时,一旦执行程序时,一旦 PLCPLC 执行到需要访问数执行到需要访问数据块时,据块时, CPUCPU 将发生出错并停机,系统功将发生出错并停机,系统功能块能块 SFB49SFB49 集成在集成在 PLCPLC 的的 CPUCPU 中,因此中,因此不需要下载。不需要下载。

高频脉冲输出控制举例高频脉冲输出控制举例 33 .进行联机调试。.进行联机调试。 ①①将将 PLCPLC 工作模式选择开关拨到工作模式选择开关拨到 RUNRUN ,按下,按下 I0.I0.
00端的控制按钮(保持端的控制按钮(保持 22秒钟以上),观察秒钟以上),观察 00 通通道的状态,可以看到道的状态,可以看到 00 通道在等通道在等 22秒之后,有高秒之后,有高频脉冲输出。对程序进行在线监控,观察频脉冲输出。对程序进行在线监控,观察 M0.0M0.0 ,,M0.2M0.2 的状态,可以看到的状态,可以看到 M0.0M0.0 的状态与的状态与 I0.0I0.0 的的状态一致,状态一致, M0.2M0.2 的状态与的状态与 00 通道的状态一致。通道的状态一致。按下按下 00 通道的硬件门通道的硬件门 I0.2I0.2 对应的控制按钮,观察对应的控制按钮,观察M0.1M0.1 的状态。的状态。

高频脉冲输出控制举例高频脉冲输出控制举例 ②②按钮按钮 I0.1I0.1端的控制按钮,观察端的控制按钮,观察 11 通道的状态,通道的状态,
可看到,由于可看到,由于 11 通道硬件设置时,采用硬件门控通道硬件设置时,采用硬件门控制,因此单独按下软件门的控制端时(这里为制,因此单独按下软件门的控制端时(这里为 I0.I0.11 ),), 11 通道没有脉冲输出。保持通道没有脉冲输出。保持 I0.1I0.1 的状态为的状态为““ 1”1” ,同时按下,同时按下 11 通道的硬件门通道的硬件门 I0.5I0.5 对应的控对应的控制按钮,观察制按钮,观察 11 通道的状态,松开硬件门通道的状态,松开硬件门 I0.5I0.5 的的对应按钮,可以观察到对应按钮,可以观察到 11 通道的脉冲继续输出,通道的脉冲继续输出,当松开软件门的控制按钮当松开软件门的控制按钮 I0.1I0.1 ,则脉冲立刻停止,则脉冲立刻停止输出。 观察输出。 观察M1.0M1.0 与与 I0.1I0.1 和和 I0.5I0.5状态的对应关系。状态的对应关系。

高频脉冲输出控制举例高频脉冲输出控制举例 ③③ 先按下先按下 11 通道硬件门通道硬件门 I0.5I0.5 的控制按钮,的控制按钮,观察观察 11 通道和通道和 M1.0~M1.2M1.0~M1.2 各位的状态,保各位的状态,保持持 I0.5I0.5 的状态为“的状态为“ 1”1” ,按下软件门的控,按下软件门的控制按钮制按钮 I0.1I0.1 ,观察,观察 11 通道是否有脉冲输出通道是否有脉冲输出(没有),保持软件门的状态为“(没有),保持软件门的状态为“ 1”1” ,,松开松开 I0.5I0.5 的控制按钮,可以看到,这是的控制按钮,可以看到,这是 11通道有脉冲输出,松开通道有脉冲输出,松开 I0.1I0.1 ,脉冲将停止,脉冲将停止输出。输出。

5.45.4 实训十用实训十用 S7PLCS7PLC 产生高频脉冲产生高频脉冲控制步进电机控制步进电机
实训目的 实训目的 11 .掌握步进电机与步进电机驱动器的接线.掌握步进电机与步进电机驱动器的接线
方法以及方法以及 PLCPLC 与步进电机驱动器的接线方与步进电机驱动器的接线方法法
22 .掌握.掌握 PLCPLC 高频脉冲的控制方法高频脉冲的控制方法 实训设备 实训设备 实训内容:步进电机控制 实训内容:步进电机控制

实训设备 实训设备 11 .. PLCPLC 实验板(实验板( CPU313CCPU313C )) 22 .步进电机一台.步进电机一台 33 .步进电机驱动器一台.步进电机驱动器一台 44 .拨动开关 .拨动开关 55 只,指示灯只,指示灯 66 只只 55 .导线若干以及电工工具 .导线若干以及电工工具 66 .. PCPC 机和机和 STEP 7STEP 7 编程调试软件编程调试软件

实训内容:步进电机控制实训内容:步进电机控制 项目内容:本项目以北京斯达微步控制技项目内容:本项目以北京斯达微步控制技术有限公司生产的系列步进电机以及步进术有限公司生产的系列步进电机以及步进电机驱动器为例,采用西门子电机驱动器为例,采用西门子 PLCPLC (( CPUCPU313C313C )实现步进电机的控制,步进电机控)实现步进电机的控制,步进电机控制要求如下所示:制要求如下所示:
(( 11 )选择开关)选择开关 SA1SA1 决定步进电机的工作决定步进电机的工作模式,当模式,当 SA1SA1 状态为状态为 00 时,步进电机处于时,步进电机处于可运行模式,当可运行模式,当 SA1SA1 的状态为“的状态为“ 1”1” 时,时,步进电机处于设置参数模式。步进电机处于设置参数模式。

实训内容:步进电机控制实训内容:步进电机控制 (( 22 )当步进电机处于工作模式时,控制)当步进电机处于工作模式时,控制
要求如下:方向控制按钮要求如下:方向控制按钮 SA2SA2 的状态为的状态为““ 0”0” 时,要求步进电机旋转方向为顺时时,要求步进电机旋转方向为顺时针(正转),为“针(正转),为“ 1”1” 要求为逆时针(反要求为逆时针(反转)。当按下长动按钮转)。当按下长动按钮 SB1SB1 时,要求步进时,要求步进电机旋转(方向由电机旋转(方向由 SA2SA2 决定),当按下停决定),当按下停止按钮止按钮 SB2SB2 时,步进电机停止运行。当按时,步进电机停止运行。当按下点动定时按钮下点动定时按钮 SB3SB3 时,步进电机将按点时,步进电机将按点动过程运动。动过程运动。

实训内容:步进电机控制实训内容:步进电机控制 (( 33 )当步进电机处于参数设置模式时,控制要)当步进电机处于参数设置模式时,控制要
求如下:按钮求如下:按钮 SB1SB1 作为作业操作请求按钮,作业作为作业操作请求按钮,作业为固定内容即:修改周期参数。按钮为固定内容即:修改周期参数。按钮 SB3SB3 为步进为步进电机速度的切换按钮,要求步进电机可以在以下电机速度的切换按钮,要求步进电机可以在以下几种频率运行几种频率运行 2.5khz2.5khz ,, 2.4khz2.4khz ,, 2.25khz2.25khz ,, 22khzkhz ,, 1.75khz1.75khz ,, 1.5khz1.5khz 。每种工作频率切换。每种工作频率切换时,分别由时,分别由 HL1HL1 、、 HL2HL2 、、 HL3HL3 、、 HL4HL4 、、 HL5HL5 、、HL6HL6显示。当步进电机处于运行工作模式时,步显示。当步进电机处于运行工作模式时,步进电机实际运行时的速度(频率)也由进电机实际运行时的速度(频率)也由 HL1HL1 、、 HHL2L2 、、 HL3HL3 、、 HL4HL4 、、 HL5HL5 、、 HL6HL6显示。显示。

实训内容:步进电机控制实训内容:步进电机控制 系统分析 系统分析 11 . . PLCPLC 和系统硬件配置和系统硬件配置
控制系统中的硬件配置如下 控制系统中的硬件配置如下

实训内容:步进电机控制实训内容:步进电机控制序号序号 名称名称 型号说明型号说明 数量数量
11 CPUCPU CPU313CCPU313C 11
22 电源模块电源模块 PS307PS307 11
33 前连接器前连接器 4040 针针 11
44 步进电机步进电机 17HS10117HS101 11
55 步进电机驱动器步进电机驱动器 SH-2H042MaSH-2H042Ma 11
66 开关按钮开关按钮 55
77 指示灯指示灯 DC24VDC24V 66

实训内容:步进电机控制实训内容:步进电机控制 22 .分析控制要求进行输入输出点分配,.分析控制要求进行输入输出点分配,并根据分配画出外部接线图。并根据分配画出外部接线图。

实训内容:步进电机控制实训内容:步进电机控制
序序号号
输入信号名称输入信号名称 地址地址 序号序号 输出信号名称输出信号名称 地址地址
11 工作模式选择开关工作模式选择开关SA1SA1 (常开)(常开)
I0.0I0.0 11 步进电机步进电机 CPCP 脉冲脉冲 00 通道通道22 步进电机方向步进电机方向 DIRDIR Q0.1Q0.1
22 开始按钮开始按钮 SB1SB1 (作(作业请求)(常业请求)(常开)开)
I0.1I0.1 33 指示灯指示灯 HL1HL1 Q0.2Q0.2
44 指示灯指示灯 HL2HL2 Q0.3Q0.3
33 停止按钮停止按钮 SB2SB2 (作(作业业 IDID )(常)(常开)开)
I0.2I0.2 55 指示灯指示灯 HL3HL3 Q0.4Q0.4
66 指示灯指示灯 HL4HL4 Q0.5Q0.5
44 点动定时按钮点动定时按钮 SB3SB3(脉冲频率)(脉冲频率)(常开)(常开)
I0.3I0.3 77 指示灯指示灯 HL5HL5 Q0.6Q0.6
55 方向控制切换按钮方向控制切换按钮SA2SA2 (常开)(常开)
I0.4I0.4 88 指示灯指示灯 HL6HL6 Q0.7Q0.7

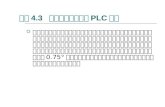
实训内容:步进电机控制实训内容:步进电机控制 步进电机与步进电机驱动器如图所示 步进电机与步进电机驱动器如图所示 17HS10117HS101 为为 22 相混合式步进电机,步距角相混合式步进电机,步距角
为为 1.81.8 度,相电流为度,相电流为 1.71.7 安培,驱动电压为安培,驱动电压为DC24VDC24V 。 。
步进电机( 17HS101 ) 步进电机接线端子

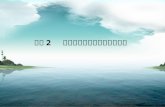
实训内容:步进电机控制实训内容:步进电机控制 步进电机与步进电机驱动器如图所示 步进电机与步进电机驱动器如图所示
步进电机驱动器 步进电机驱动器接线端子

实训内容:步进电机控制实训内容:步进电机控制 SH-2H042MaSH-2H042Ma 步进电机驱动器为步进电机驱动器为 2/42/4 相混合型步相混合型步
进电机驱动器。细分数由拨位开关设定(进电机驱动器。细分数由拨位开关设定( 22 、、 44 、、88 )分别对应步距角)分别对应步距角 0.90.9 度、度、 0.450.45 度、度、 0.2250.225 度。度。最大相电流输出为最大相电流输出为 1.71.7安培,工作电压为安培,工作电压为 DC24VDC24V ,,配套电机有配套电机有 17HS00117HS001 、、 17HS10117HS101 、、 17HS11117HS111和和 23HS200123HS2001 。步进电机与配套步进电机驱动器。步进电机与配套步进电机驱动器的接线较简单。如图的接线较简单。如图 5-4-25-4-2 所示,将步进电机相所示,将步进电机相应相的接线端子(根据颜色判断)连接到步进电应相的接线端子(根据颜色判断)连接到步进电机驱动器对应端子的上即可 机驱动器对应端子的上即可

实训内容:步进电机控制实训内容:步进电机控制 步进电机与步进电机驱动器的接线图如图步进电机与步进电机驱动器的接线图如图
所示 所示

实训内容:步进电机控制实训内容:步进电机控制 步进电机驱动器与步进电机驱动器与 PLCPLC 连接,连接, SH-2H042SH-2H042
MaMa 步进电机驱动器的输入信号为步进电机驱动器的输入信号为 CP+CP+ 、、CP-CP- 和和 DIR+DIR+ 、、 DIR-DIR- ,其连接方式有三种:,其连接方式有三种: ①共阳极方式:把 ①共阳极方式:把 CP+CP+ 和和 DIR+DIR+ 接在一起接在一起作为共阳端作为共阳端 OPTOOPTO (接外部系统的(接外部系统的 +5V+5V ),),脉冲信号接入脉冲信号接入 CP-CP-端,方向信号接入端,方向信号接入 DIR-DIR-端;②共阴极方式:把端;②共阴极方式:把 CP-CP- 和和 DIR-DIR- 接在一接在一起作为共阴端(接外部系统的起作为共阴端(接外部系统的 GNDGND ),脉),脉冲信号接入冲信号接入 CP+CP+ 端,方向信号接入端,方向信号接入 DIR+DIR+端;③差动方式:直接连接。 端;③差动方式:直接连接。

实训内容:步进电机控制实训内容:步进电机控制 SH-2H042MaSH-2H042Ma 型号步进电机驱动器输入信型号步进电机驱动器输入信
号的幅值为号的幅值为 TTLTTL 电平,最大为电平,最大为 5V5V ,如果,如果控制电源为控制电源为 5V5V 则可以直接接入,否则需要则可以直接接入,否则需要在外部连接限流电阻在外部连接限流电阻 RR ,以保证给驱动器,以保证给驱动器内部光耦原件提供内部光耦原件提供 8~15mA8~15mA 的驱动电流。 的驱动电流。

实训内容:步进电机控制实训内容:步进电机控制 外加电阻大小如表所示 接线图如图所示 外加电阻大小如表所示 接线图如图所示
信号幅值信号幅值 限流电阻限流电阻 RR
5V5V 不加不加
12V12V 680Ω680Ω
24V24V 2KΩ2KΩ

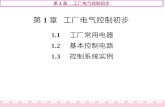
实训内容:步进电机控制实训内容:步进电机控制 西门子西门子 PLCPLC 与与 SH-2H042MaSH-2H042Ma 步进电机驱步进电机驱
动器相连时,采用共阳极方式连接,将动器相连时,采用共阳极方式连接,将 CPCP++ 和和 DIR+DIR+ 接在一起作为共阳端接在一起作为共阳端 OPTOOPTO 。。其接线方式图所示 其接线方式图所示

实训内容:步进电机控制实训内容:步进电机控制 根据上图所示的接线方式,以及输出分配根据上图所示的接线方式,以及输出分配
时,对时,对 PLCPLC 控制步进电机控制步进电机 CPCP 端和端和 DIRDIR 端端分配的输出点,可画出分配的输出点,可画出 PLCPLC 与步进电机驱与步进电机驱动器之间的接线图,如图所示 动器之间的接线图,如图所示

实训内容:步进电机控制实训内容:步进电机控制 另外另外 PLCPLC 输出模块的输出模块的 24V24V 直流电源见图所直流电源见图所
示:普通输入输出点的接线图如图所示 示:普通输入输出点的接线图如图所示

实训内容:步进电机控制实训内容:步进电机控制 33 .分析控制要求,并根据控制要求进行.分析控制要求,并根据控制要求进行硬件组态和程序设计。硬件组态和程序设计。
参考程序见附录光盘 参考程序见附录光盘

实训步骤实训步骤 11 .根据步进电机与步进电机驱动器端子.根据步进电机与步进电机驱动器端子
图,完成系统的硬件接线。图,完成系统的硬件接线。 22 .创建步进电机控制项目并进行硬件组.创建步进电机控制项目并进行硬件组态。态。
33 .编写控制程序,并下载运行。.编写控制程序,并下载运行。 44 .在线调试 .在线调试