General coordinate frame assignments
15
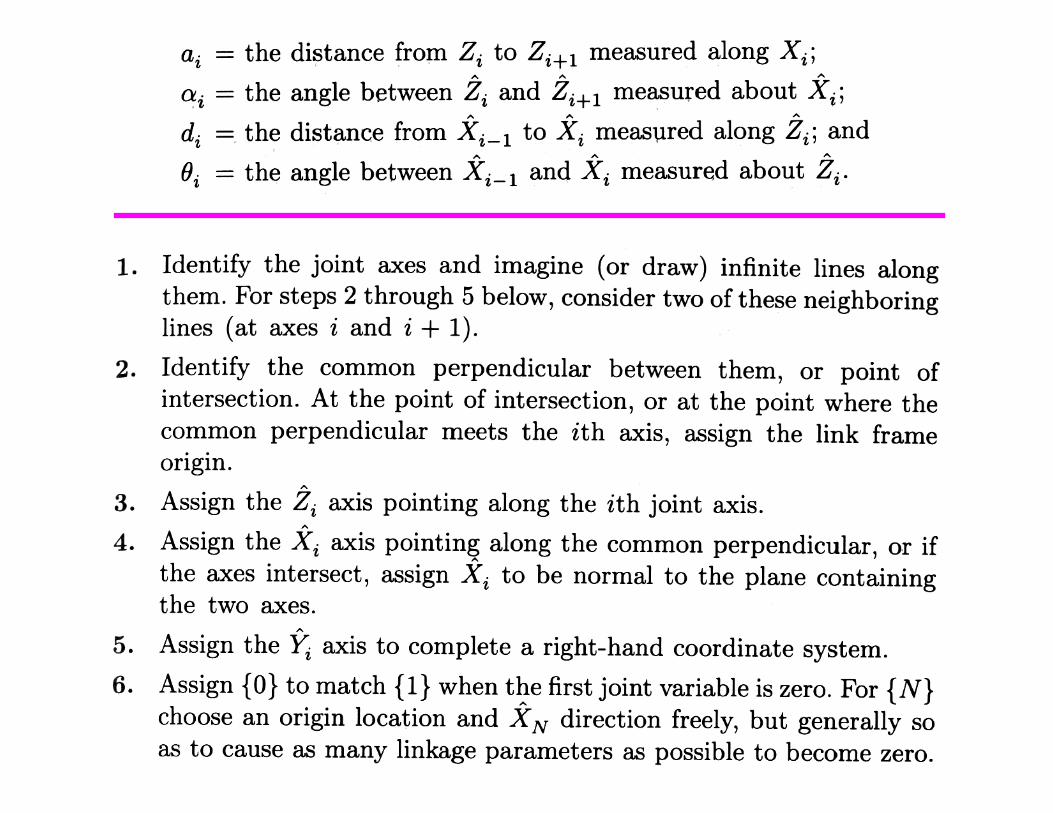
General coordinate frame assignments (Craig, Fig. 3.5)
Transcript of General coordinate frame assignments
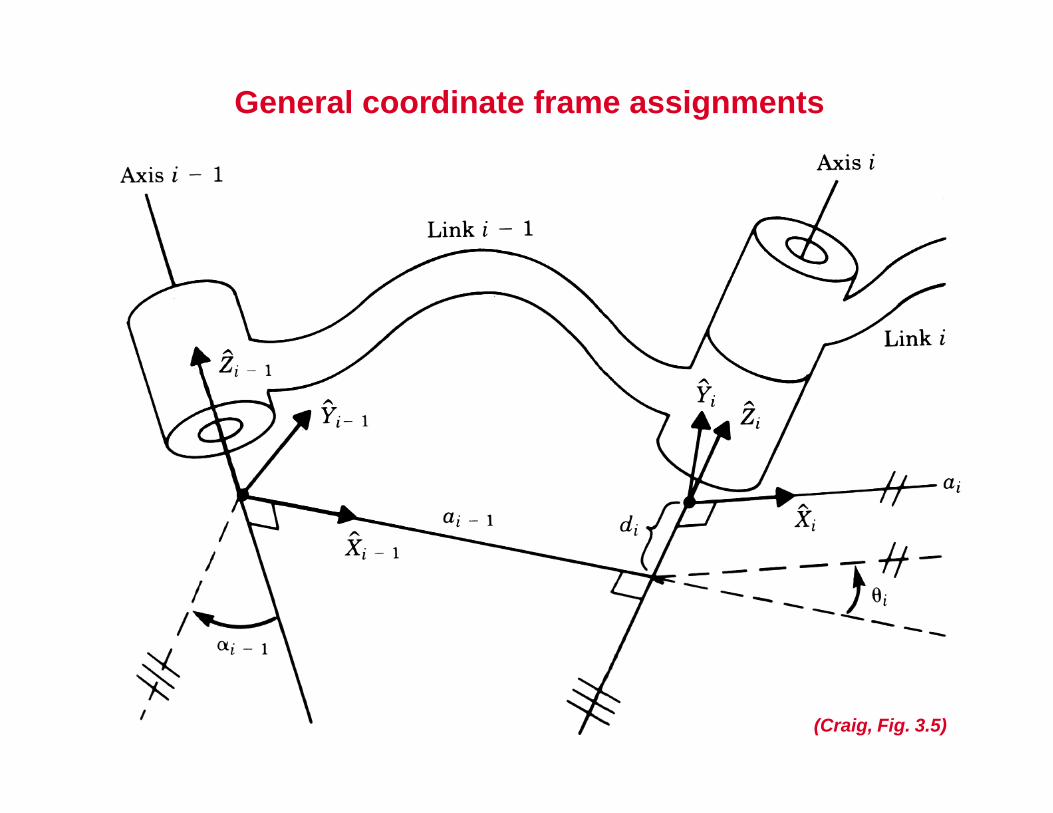
General coordinate frame assignments
(Craig, Fig. 3.5)
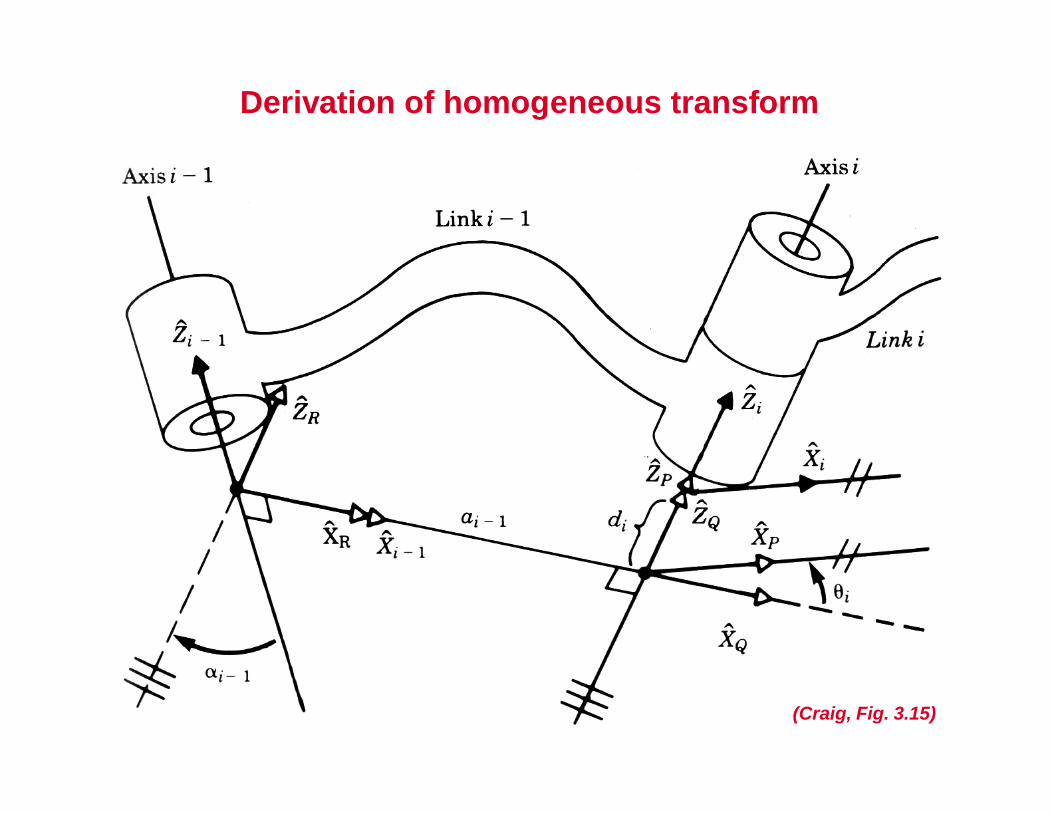
Derivation of homogeneous transform
(Craig, Fig. 3.15)
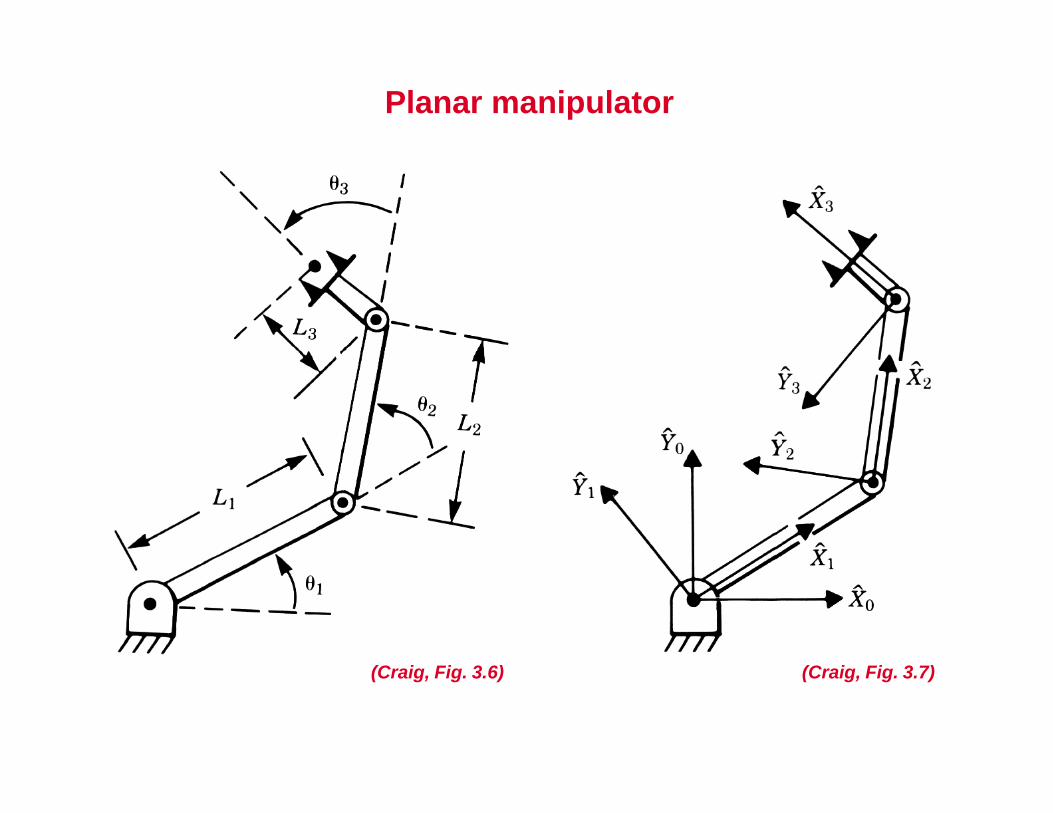
Planar manipulator
(Craig, Fig. 3.6) (Craig, Fig. 3.7)
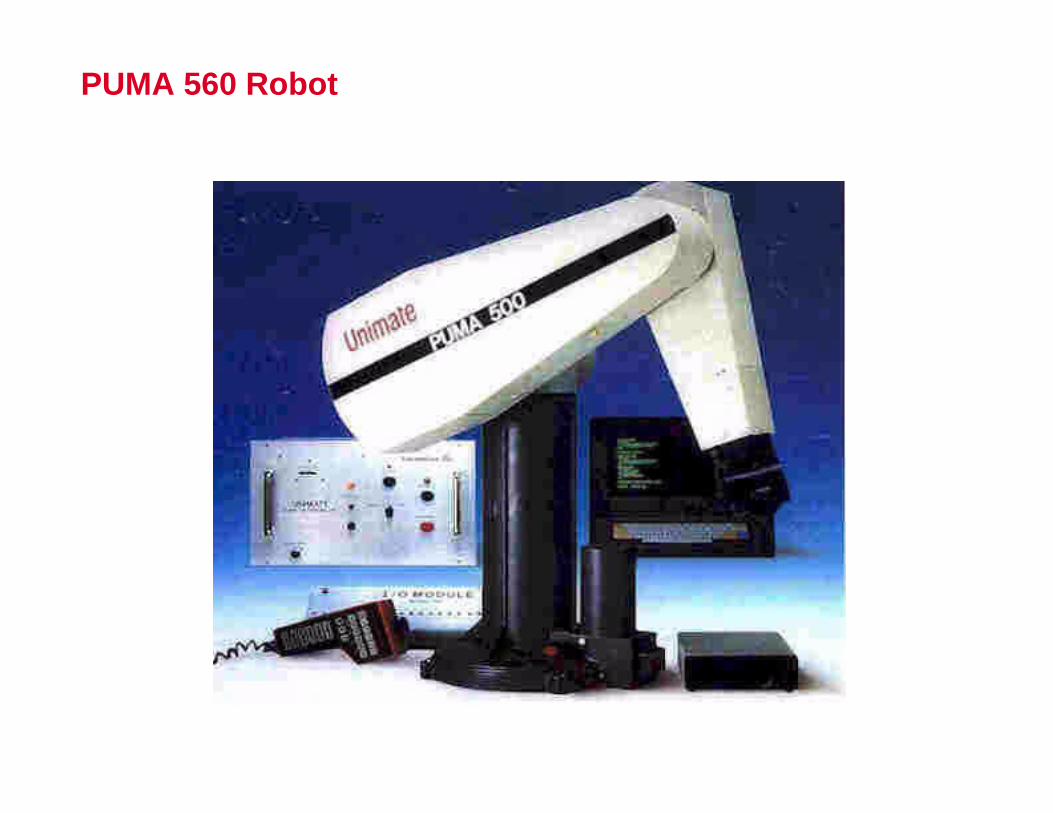
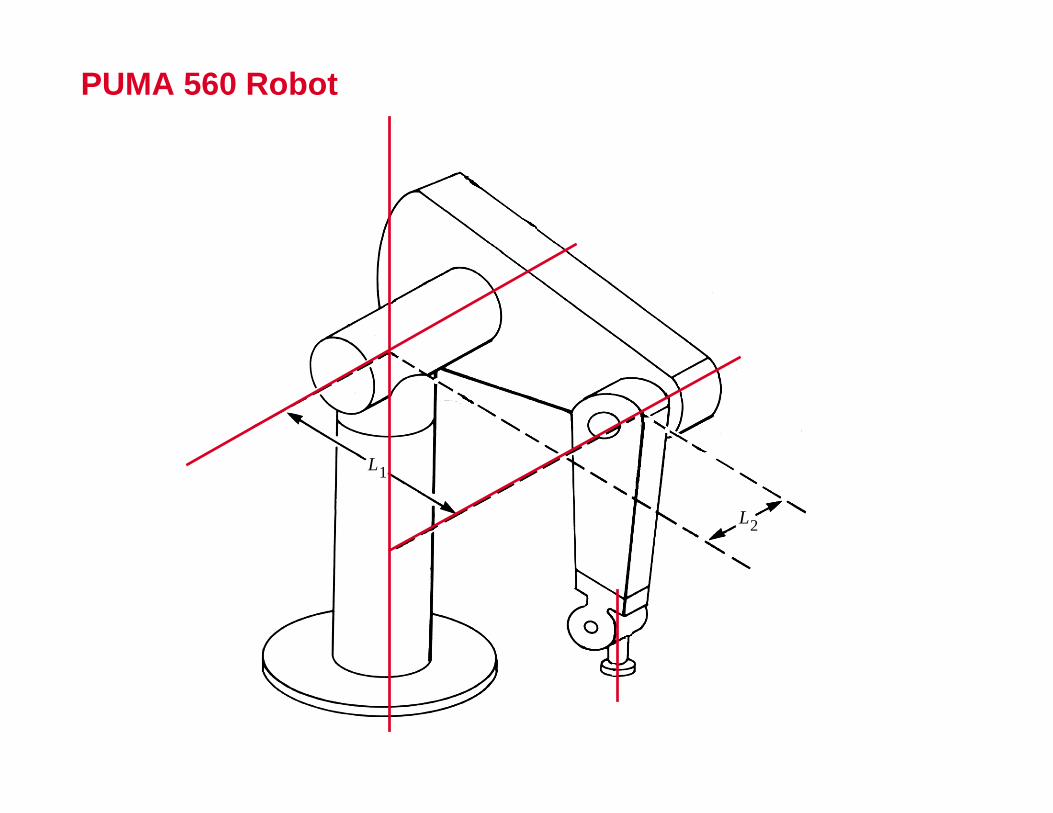
PUMA 560 Robot
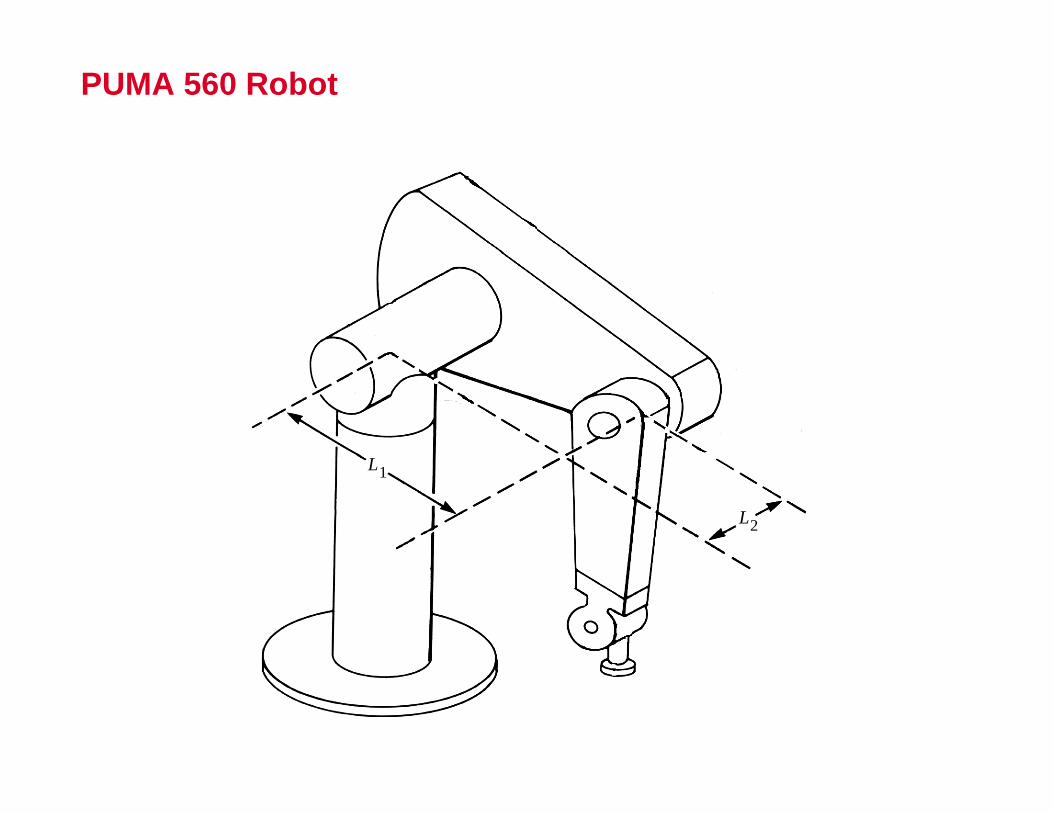
PUMA 560 Robot
L
1
L
2
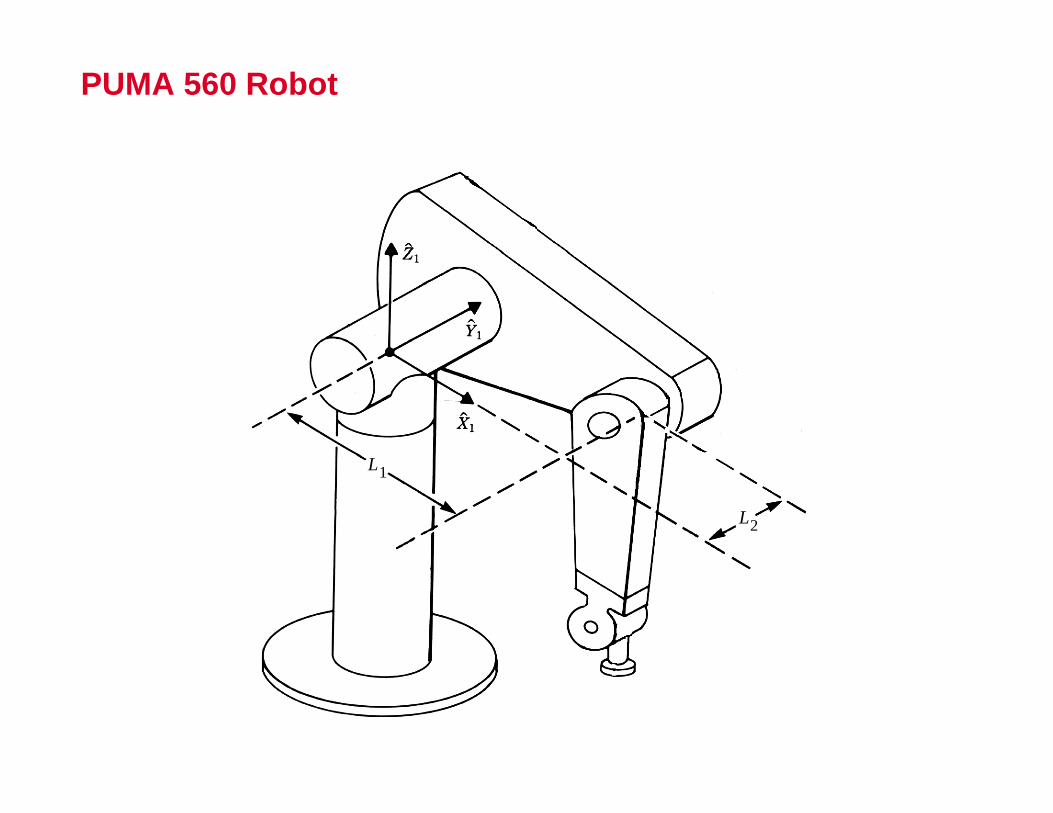
PUMA 560 Robot
L
1
L
2
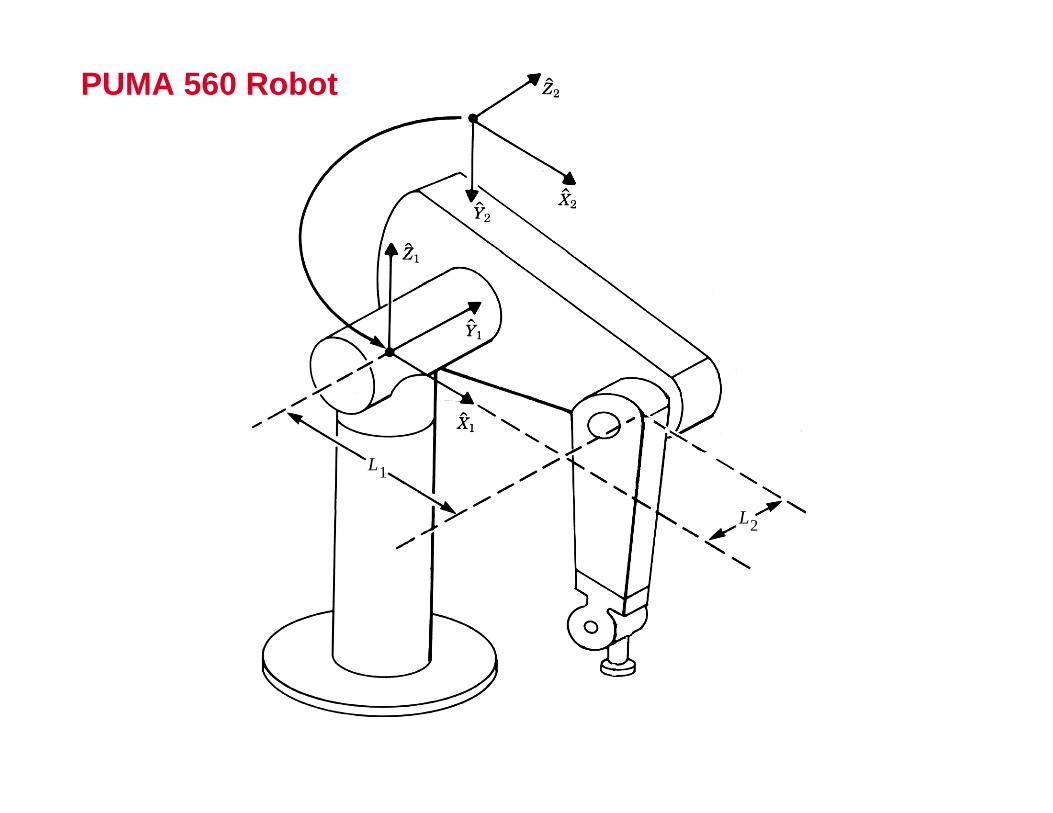
PUMA 560 Robot
L
1
L
2
PUMA 560 Robot
L
1
L
2
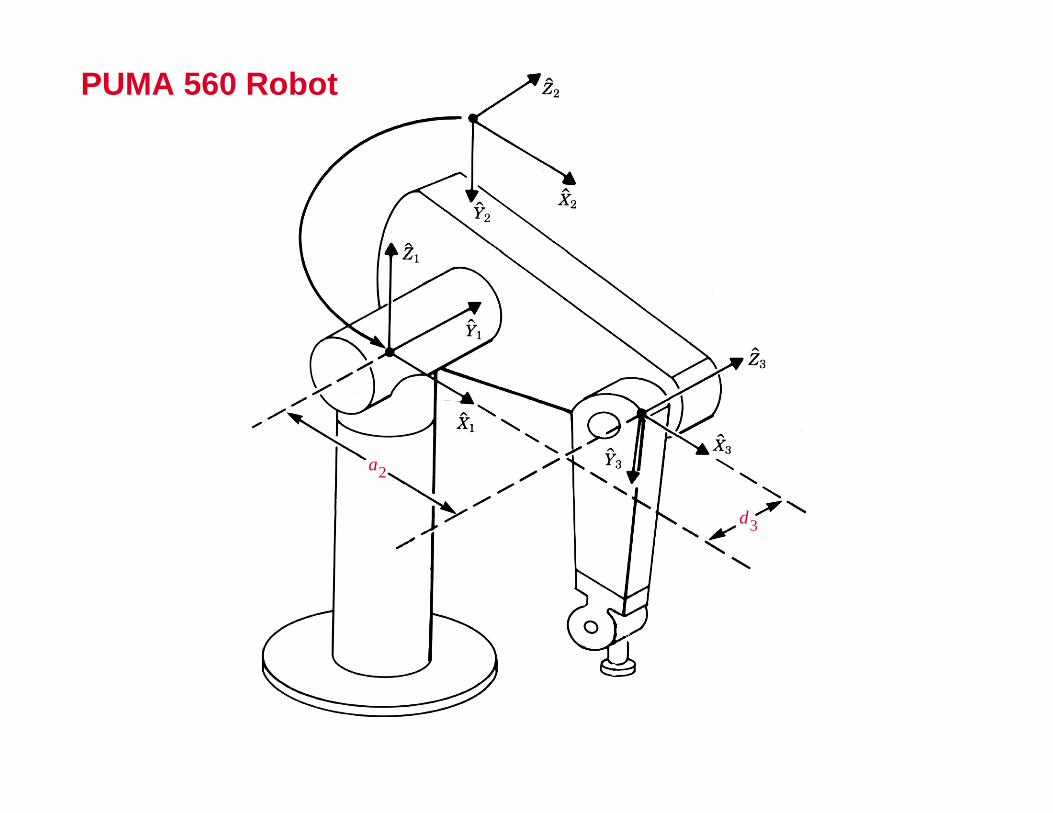
PUMA 560 Robot
a
2
d
3
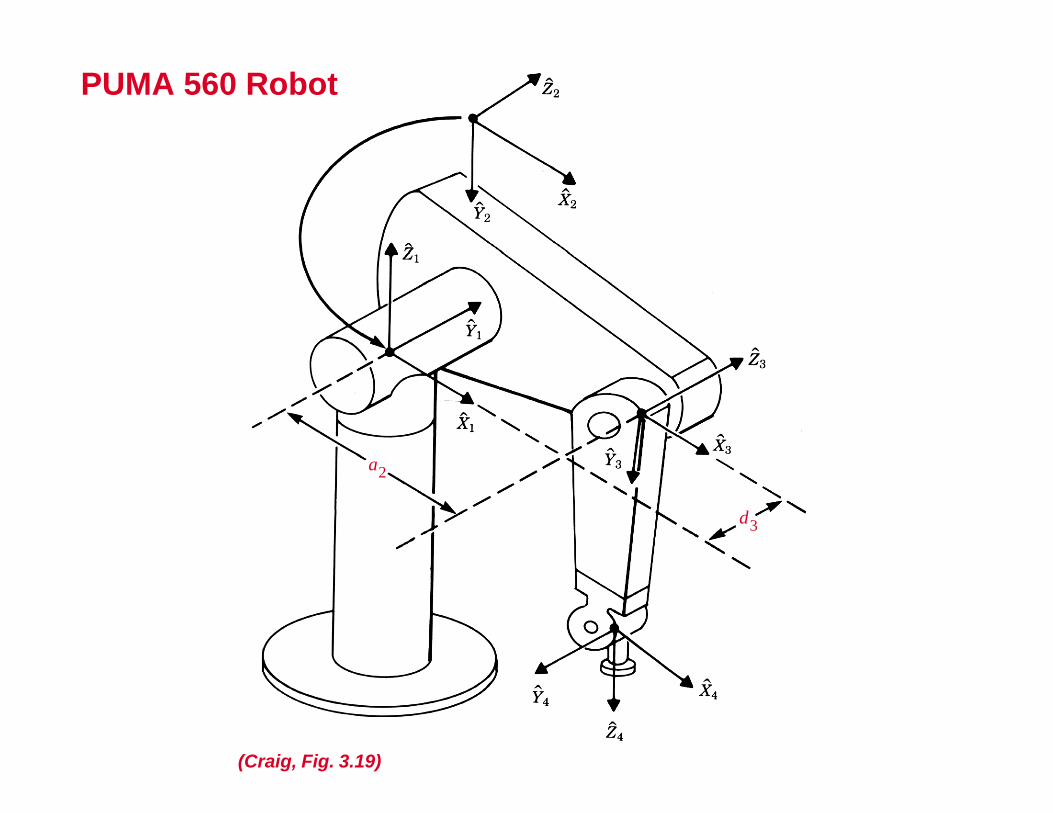
PUMA 560 Robot
a
2
d
3
(Craig, Fig. 3.19)
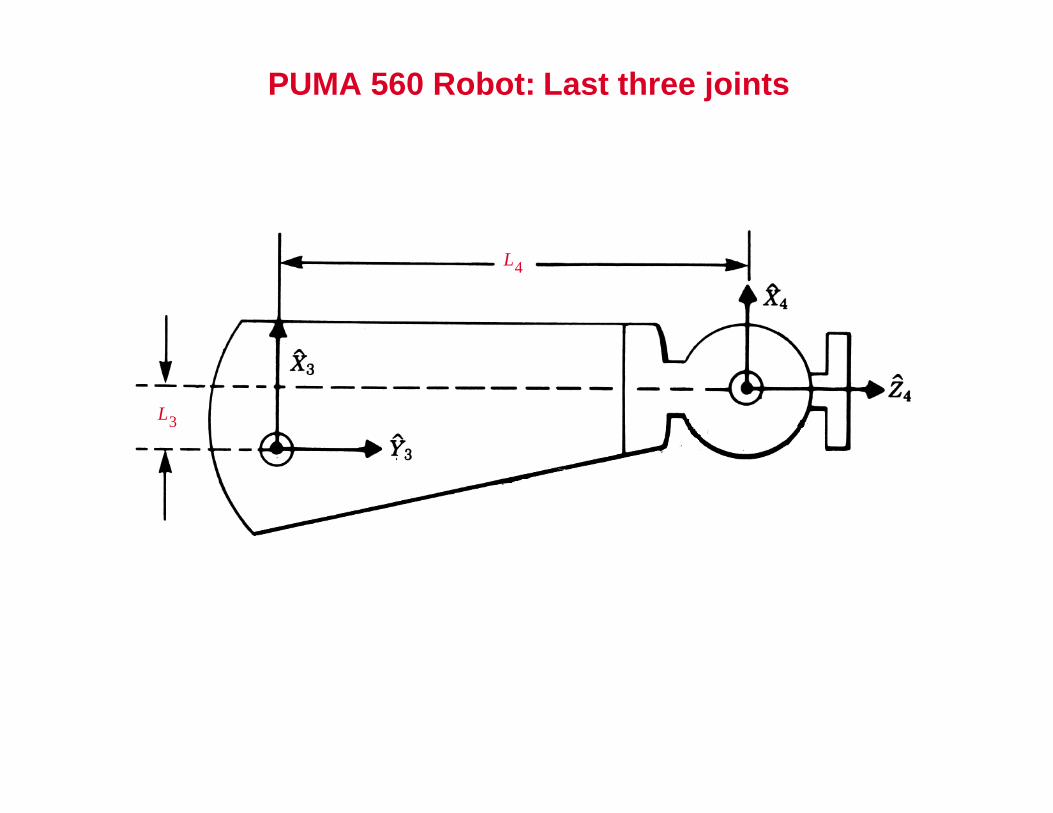
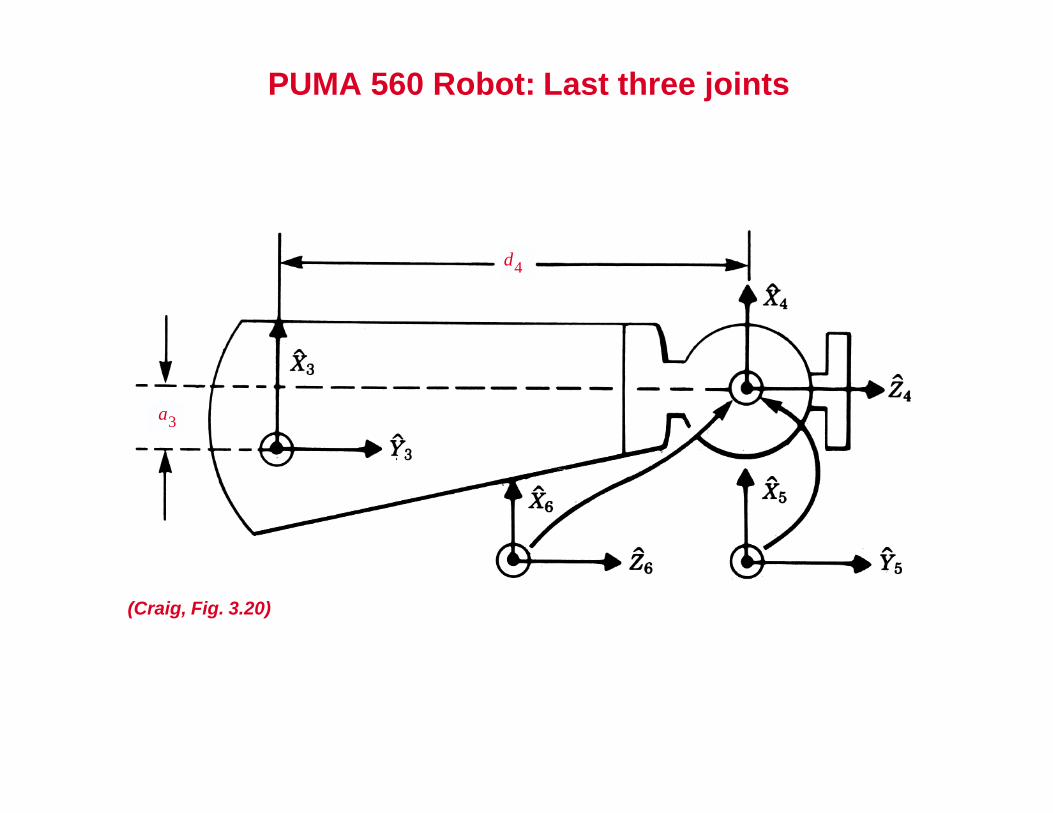
PUMA 560 Robot: Last three joints
L
4
L
3
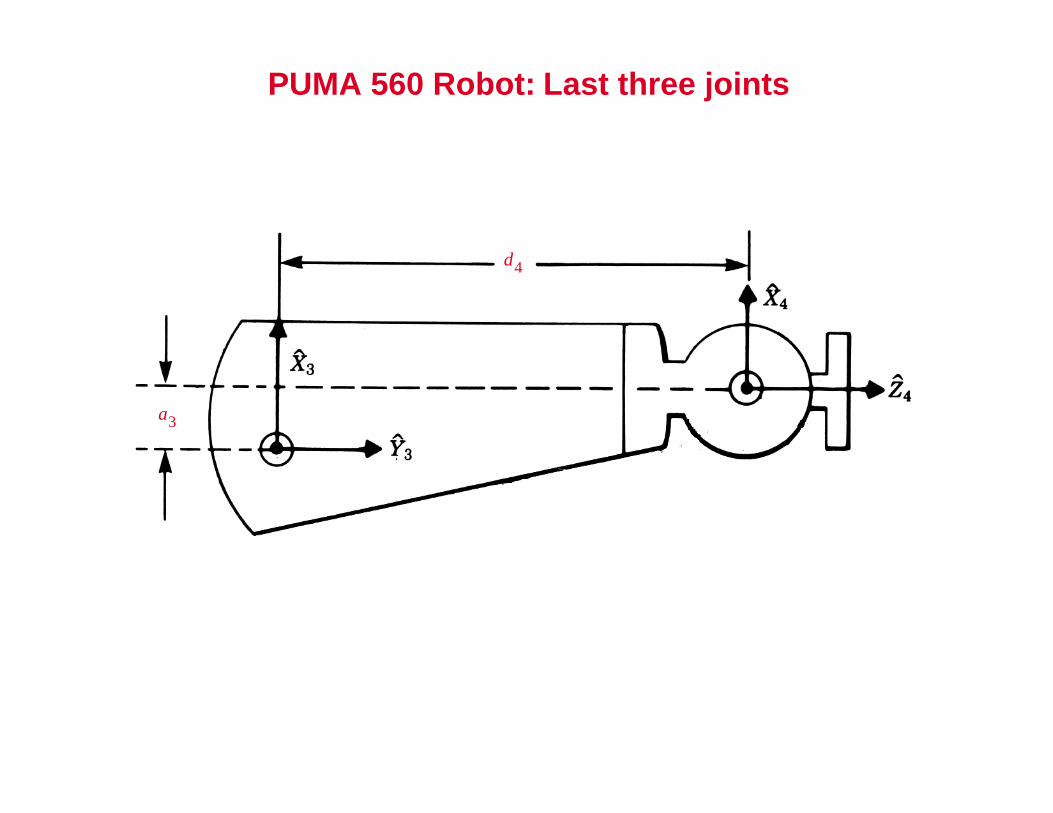
PUMA 560 Robot: Last three joints
d
4
a
3
PUMA 560 Robot: Last three joints
d
4
a
3
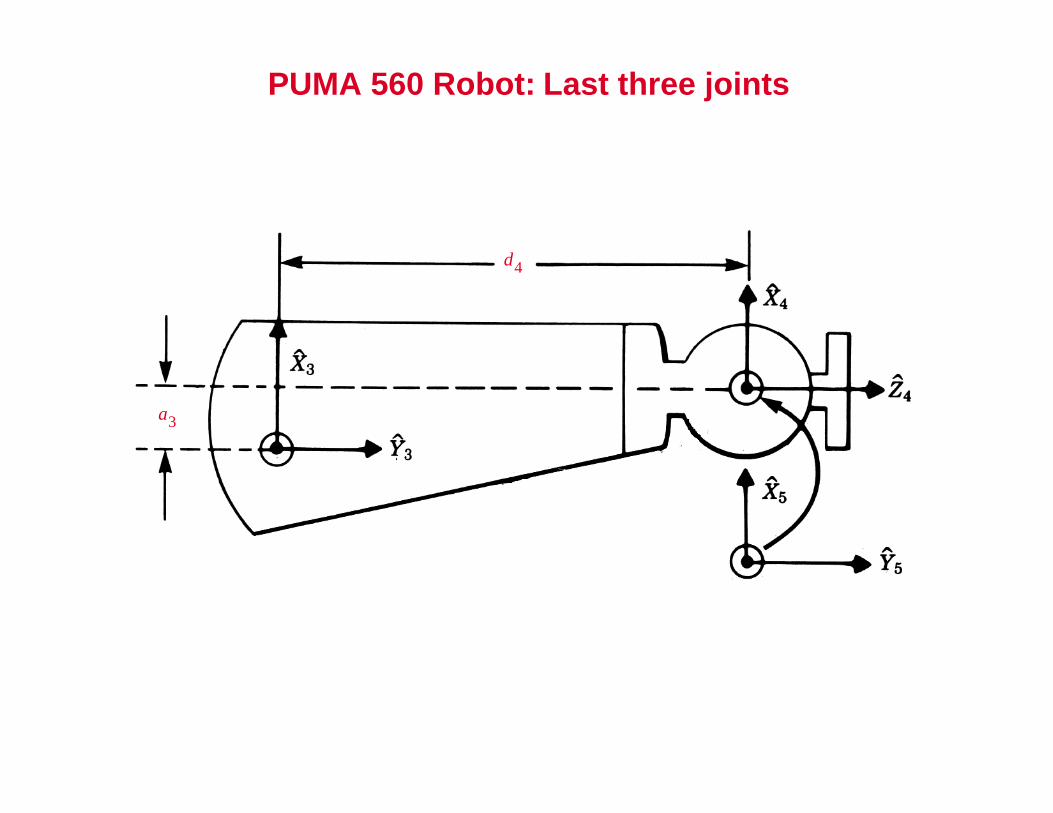
PUMA 560 Robot: Last three joints
d
4
a
3
(Craig, Fig. 3.20)