第 卷 第 期 应 用 力 学 报 Vol. No. 201 年 月 CHINESE JOURNAL … ·...
10
基金项目:国家自然科学基金项目(51409205,51579085);博士后自然科学基金项目(2015M572656XB);陕西省博士后自然科学基金项目;水文 水资源与水利工程科学国家重点实验室开放研究基金(2014491011) 收稿日期:2018-02-27 修回日期:2018-03-23 第一作者简介:秦全乐,男,1994 年生,西安理工大学水利水电工程系,硕士研究生;研究方向——水工结构安全监控研究。 E-mail: [email protected] 应 用 力 学 学 报 CHINESE JOURNAL OF APPLIED MECHANICS 第 卷 第 期 201 年 月 Vol. No. .
Transcript of 第 卷 第 期 应 用 力 学 报 Vol. No. 201 年 月 CHINESE JOURNAL … ·...

基金项目:国家自然科学基金项目(51409205,51579085);博士后自然科学基金项目(2015M572656XB);陕西省博士后自然科学基金项目;水文
水资源与水利工程科学国家重点实验室开放研究基金(2014491011)
收稿日期:2018-02-27 修回日期:2018-03-23
第一作者简介:秦全乐,男,1994 年生,西安理工大学水利水电工程系,硕士研究生;研究方向——水工结构安全监控研究。
E-mail: [email protected]
应 用 力 学 学 报
CHINESE JOURNAL OF APPLIED MECHANICS
第 卷 第 期
201 年 月
Vol. No.
.

第 期 秦全乐,等:基于振动测试和有限元法的泵站厂房模态识别 2
文章编号:

第 期 秦全乐,等:基于振动测试和有限元法的泵站厂房模态识别 3
基于振动测试和有限元法的泵站厂房模态识别
秦全乐 1 杨杰 1
程琳 1,2 郑东健 2
李炎隆 1
(1 西安理工大学 省部共建西北旱区生态水利国家重点实验室 710048 西安;2 河海大学 水文水资源与水利水电工程科学国家重点实验室 210098
南京)
摘要:模态参数识别在工程领域的应用非常广泛,相关研究具有重要的理论意义和实际工程应用
价值。本文以某泵站厂房作为研究对象,分别采用增强型频域分解法(Enhanced Frequency Domain
Decomposition,EFDD)和随机子空间识别法(Stochastic Subspace Identification,SSI)对不同工
况下的泵站厂房结构进行模态参数识别,并与有限元法(Finite Element Method,FEM)的分析结
果做对比研究。结果表明将 EFDD 和 SSI 方法应用于泵站厂房结构的模态识别是适用且可靠的,
其中 EFDD 法计算速度较快,但需要拾取峰值判别特征模态,其精度受主观因素影响较大,而 SSI
法可自动识别相对稳定的特征模态,该结论可为实际工程应用提供参考。
关键词:泵站厂房;模态参数识别;随机子空间识别(SSI);增强型频域分解(EFDD)
中图分类号:TV32 文献标识码: A
1 引 言
结构模态参数识别技术可应用于工程结构的
日常管理与维护、结构健康监测、结构振动控制等
多方面,有着重要的研究价值[1]。任何结构都可以
看作由刚度、质量、阻尼矩阵组成的力学系统,结
构发生损伤必将引起结构模态参数(固有频率、阻
尼和振型等)的改变。因此,结构模态参数的改变
标志着结构已经发生损伤[2]。实测结构正常运行的
振动特征并进行模态参数识别,其分析结果可反映
结构的实际运行状态,并由此可得到结构的真实动
力特性。结构模态参数识别在国内外已有许多研究。
例如,宗周红等[3]提出基于响应面模型修正技术和
单元模态应变能损伤指标的结构损伤识别方法,并
对下白石大桥的损伤情况进行了识别;Teughels 等[4]在结构模态分析损伤识别时,识别分析了损伤结
构的多个自由度信息,继而识别了结构损伤的程度
和位置;Sanghyun Choi 等[5]构建了基于结构模态能
的随着结构损伤前后的振型变化而变化的损伤指
标,并对梁板结构进行了数值分析;公茂盛等[6]采
用自适应递归算法(Adaptive Forgetting through
Multiple Models,AFMM)追踪某高楼在强震激励
下的模态参数变化,并根据模态识别结果进行了结
构的健康评估;Frank 等[7]指出希尔伯特-黄变换
(Hilbert-Huang Transform,HHT)能够精准地对非
线性动态系统的模态参数进行识别;程琳等[8]提出
基于 Hankel 矩阵联合近似对角化(Hankel matrix
Joint Approximate Diagonalization,HJAD)的运行模
态分析方法,并将该方法应用于某重力坝的模态参
数识别,取得了很好的效果;张辉东等[9]将自回归
滑动平均模型(Auto-Regressive and Moving Average
Model,ARMA 模型)应用于大型水电站厂房的结
构模态参数识别,结果表明该识别方法可满足要求;
程琳等[10]基于混凝土坝的强震观测数据,提出采用
矢量自回归滑动平均模型(Auto-Regressive Moving
Average Vector, ARMAV)和稳态图法来进行混凝土
坝结构模态参数识别;Xiao 等[11]采用随机子空间识
别法(Stochastic Subspace Identification,SSI)对 3
跨连续梁和全尺寸桥梁进行了模态参数识别,并指
出该算法计算时间短和精度高的特点;张振华等[12]
提出基于幂迭代的 API(Approximated Power
Iteration Subspace Tracking, API)快速子空间跟踪方
法适用于递推的随机积子空间方法,并采用仿真计
算验证了该方法既能保证识别精度,又能减少计算
量;叶锡钧等[13]采用增强型频域分解法(Enhanced
Frequency Domain Decomposition,EFDD)对某大
桥的振动模态参数进行了识别分析研究。

第 期 秦全乐,等:基于振动测试和有限元法的泵站厂房模态识别 4
本文以某泵站厂房为例,利用该泵站开机和稳
定运行工况的振动监测数据,分别采用 EFDD 方法
和 SSI 方法进行模态参数识别,并与有限元法
(Finite Element Method,FEM)的分析结果作对比
研究,分析不同方法识别结果存在差异的原因以及
各自的优缺点,为后续此类问题的研究提供参考。
2 模态识别方法的基本原理
按照识别信号域的不同可将结构模态参数识
别方法分为频域方法、时域方法和时频域方法。频
域方法通常是根据结构传递函数或频响函数来进行
模态识别,此类方法各项参数物理意义明确;时域
方法是直接利用结构的实测响应信号建立模型并进
行模态识别的方法,通常可以较好地识别结构阻尼,
在一定程度上弥补频域方法识别结果的不足;时频
域方法相对于前两类方法在处理非稳定信号和非线
性系统模态识别方面具有一定的优势,但目前能用
于实际工程的时频域分析方法相对较少[14]。表 1 中
列举了多种频域、时域和时频域的模态识别方法。
表 1 常用模态识别方法列表
Tab.1 List of common modal identification methods
识别域
(Recognition domain)
名称
(name)
简写
(abbrev)
频域
(frequency domain)
峰值拾取法[15](peak picking) PP
最小二乘复频域法[16](least-squares complex exponential) LSCF
多参考点最小二乘复频域法[17](polyreference least-squares complex exponential) PolyMAX
频域分解法[18](frequency domain decomposition) FDD
增强频域分解法[19](enhancement frequency domain decomposition) EFDD
时域
(time domain)
ARMA 时序模型[20](ARMA time series model)
Ibrahim 时域法[21](Ibrahim time domain) ITD
Spare 时域法[22](Spare time domain) STD
最小二乘复指数法[23](least-squares complex exponential) LSCE
多参考点复指数法[24](polyreference complex exponential) PRCE
随机减量法[25](random decrement funtion technique) RDT
自然激励技术[26](natural excitation technique) NExT
多参考点自然激励技术[27](multiple-reference natural excitation technique) MNExT
特征系统实现法[28](eigsysstem realization algorithm) ERA
协方差驱动的随机子空间法[29](covariance-driven stochastic subspace identification) SSI-Cov
数据驱动的随机子空间法[30](data-driven stochastic subspace identification) SSI-Data
时频域
(time-frequency domain)
希尔伯特-黄变换[31](hilbert-huang transform) HHT
小波变换[32](wavelet transform) WT
在大型土木工程的模态参数识别中,频域类方
法的EFDD和时域类方法的 SSI-Data是最常用的两
种方法,这两种方法技术成熟可靠,以下对 EFDD
和 SSI-Data 两种识别方法的基本理论进行介绍。
2.1 增强型频域分解法(EFDD)
Prevosto[18] 于 1982 年提出了频域分解法
(Frequency Domain Decomposition,FDD),EFDD
是频域分解法的改进方法[33],该方法和峰值拾取法
(Peak Picking Technique,PP)根据功率谱密度函
数拾取峰值点所对应的特征频率相似,操作简单。
它和峰值拾取法的区别就是通过奇异值分解,
EFDD 方法能直接得到振型,当相邻模态正交时可
识别密集模态。
输入和输出信号之间的关系可表示为:
*( ) ( ) ( ) ( )yy xxj j j j TG H G H (1)
其中: m m
yy j G 为输出信号的功率谱密度矩
阵,m 是测量点数; lxl
xx j G 是输入信号功率
谱密度矩阵, l 为激励点数; ( ) mxlj H 为频响
函数矩阵; ( ) 表示复共轭; ( ) T 表示转置。
多自由度系统中,频响函数可以写成如下部分
分式和的形式:
1
( )( ) ( )
ni i
i i i
jj j
*R R
H (2)
其中:n 为模态阶数; iR 为频响函数的 i 阶矩阵; i
R
为频响函数的 i 阶伴随矩阵; i 为离散系统的特征
值; i为伴随矩阵的特征值;为系统固有振动频
率。
i 与 i 及模态阻尼比 i 的关系:
21i i i i ij (3)
通过变换可得到:
ˆyy i i ij H
G U S U (4)
其中: iS 为分解提取所得的随机矩阵; iU 为奇异向
量。
由此得到的第一个奇异向量 1U 就是模态振型
的估计: 1φ = U 。

第 期 秦全乐,等:基于振动测试和有限元法的泵站厂房模态识别 5
通过对输出信号 ( )jyy
G 在频率点处的功率谱
密度矩阵进行奇异值分解,即可获得结构的模态参
数。
2.2 数据驱动的随机子空间法(SSI-Data)
SSI-Data 是典型的数据驱动的模态识别方法[34]。所谓数据驱动,即无需对实测数据进行处理以
得到该数据的协方差矩阵,可直接从时域监测信号
来进行模态参数识别[35]。
线性离散状态空间的模型可表示为:
1k k k
k k k
x = x + w
y = x + v
A
C (5)
其中: kx 为时间为 k 时系统离散的状态向量; ky 为
输出的向量;A 为离散系统的状态矩阵;C 为输出
矩阵; kw 为系统的不确定性过程噪声; kv 为观测
噪声。
对系统的状态矩阵 A 的特征值进行分解:
1-A =ψΛψ (6)
其中:ψ为离散系统的特征向量矩阵;
( ) ( 1,2, , )idiag i n Λ , 为复特征值的对角矩阵;
i 为离散特征值。
可用下式求得系统特征值 i :
1
lni t
i i i ie rt
(7)
其中: i 为阻尼因子; i 为第 i 阶固有频率;阻尼
比 i 如下:
2 2
i
i
i i
(8)
振型φ可用系统特征向量ψ表示如下:
Cφ = ψ (9)
根据上述分析可见只要求出 A 、C 就可以进行
模态参数识别。根据实测振动数据构造 Hankel 矩
阵,并把其行空间分为“past”空间和“future”空
间:
0 1 1
1 2
1 2
1 1
1 2
2 1 2 2 2
0 1
2 1
1
r r r
j
r r r
j
r r r
i i i j
i i i j
i i i j
i i i j
r ri p
fi i
y y y
y y y
y y y
y y yj
y y y
y y y
past
future
H
Y Y
Y Y
“ ”
“ ”
(10)
其中: r r
iy 为 i 时刻 r 个测点的响应; l
iy 为 i
时刻所有 l 个测点的观测值;参数 j 根据实际情况,
尽可能取一个大的值;下标 p 和 f 分别代表“past”
和“future”。
对 Hankel 矩阵进行正交三角(QR)分解,可
得到 fY 行空间在 pY 行空间上的正交投影矩阵i
rp ;
根据随机子空间理论,i
rp 可分解为观测矩阵 iO 和
Kalman 滤波状态序列i
X 的乘积。对i
rp 进行奇异值
分解(SVD),即可得到系统矩阵 A 和输出矩阵C 。
1i
i
i i
A XX
C Y (11)
3 工程实例
某工程输水泵站安装有4台3500W的同步电动
机组,是整个供水工程的心脏部位。泵站厂房结构
承受正弦荷载,使得厂房结构处于振动状态。该工
程泵站由于 3#机组段厂房吊物孔次梁某阶自振频
率与水泵水力冲击频率相近,引起结构共振,导致
机组运行阶段吊物孔次梁及附近楼板振动异常剧
烈,成为泵站建筑物的严重安全隐患。
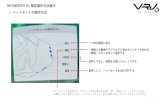
对泵站厂房进行现场振动检测,各个测点布置
情况详见图 1,其中 1、2#测点为水泵机墩测点,3#
测点为电机机坑测点,4、5#测点为水泵机墩支承主
梁测点,6#测点为吊物孔次梁测点。本次实验用到
的主要仪器有:PCB 三向加速度传感器,dSPACE
数据采集系统,滤波器、信号放大器等。
图 1 厂房测点布置示意图
Fig.1 Layout of measuring point of powerhouse
设定振动检测的采样频率为 10 z0H0sf ,其相
应的采样时间间隔为 0.001st ,滞后时间设定为
0.05s。
截止频率的选择应综合考虑加速度计的量程
和振动信号的频域范围,一般情况下泵站厂房振动
1#机组 2#机组 3#机组 4#机组
吊物孔 吊物孔 吊物孔 吊物孔
6#测点(6# measuring point)
1#测点(1# measuring point)
2#测点(2# measuring point)
1#机组厂房 2#机组厂房 3#机组厂房 4#机组厂房
上机架仰视图
3#测点(3#measuring point)
主梁仰视图
上游
下游
4#测点(4#measuring point)
5#测点(5#measuring point)
C
B
A
D
C
B
A
D
说明(explain):
1. 此图为监测厂房结构测点布置示
意图,未按比例绘制(This diagram
is a schematic drawing, not
proportionately drawn)。
2. 2#机组和3#机组的测点布置相
对位置相同(The measurement
points of the 2# unit and the 3# unit
are in the relative same position)。
1# unit powerhouse 2# unit powerhouse 3# unit powerhouse 4# unit powerhouse
(lifting hole)
(1# unit) (2# unit) (3# unit) (4# unit)
(lifting hole)(lifting hole)(lifting hole)
(upstream)
(downstream)
(bottom view of upper bracket) (bottom view of main girder)

第 期 秦全乐,等:基于振动测试和有限元法的泵站厂房模态识别 6
的特征频率最低为 1/3~1/6 倍的水泵主轴转频。该
工程泵站水泵转速为 500 转 /分,对应频率为
8.33Hz,因此厂房振动的特征频率最低取为
2.78Hz~1.39Hz。设定各测点的最低截止频率为
2Hz,最高截止频率为 350Hz。
由于各种复杂因素的影响,振动信号中往往含
有大量的噪声。要获得振动信号的准确特征并依据
这些特征进行结构运行状态的监测和故障诊断,在
根据实测振动响应数据进行模态识别之前需要对数
据进行滤波处理,去掉噪声信号。泵站厂房振动的
振源激励并非随机白噪声,因此不能直接应用
EFDD 和 SSI 进行模态识别。此时对振动响应实测
数据进行滤波处理时还需要滤除水泵水力冲击激励
的主频率。
实测振动加速度及其滤波后的振动信号如图 2
所示。限于篇幅原因,本文只给出开机工况下 4-6#
测点响应滤波前后的功率谱密度图,如图 3 所示。
由图 2 和图 3 可知,振动信号经滤波后变得平滑,
一些频率噪音成分被虑除,滤波后信号的相位波动
很小。分析可知,各测点开机时比稳定工况下的振
动加速度幅值大,说明在开机时的振动更为剧烈,
这符合一般情况;根据厂房各测点的振动情况相比
较来看,上游主梁和吊物孔的振动更为剧烈。
(a)开机工况信号 (b)稳定工况信号
(a)start state signal (b)steady state signal
图 2 实测振动响应
Fig.2 Measured vibration response

第 期 秦全乐,等:基于振动测试和有限元法的泵站厂房模态识别 7
图 3 开机工况功率谱密度
Fig.3 Power spectral density of start state
对于开机和稳定工况,借助 DASP 振动测试系
统分别采用 EFDD 法和 SSI 法进行模态参数识别,
其识别结果如图 4 和图 5 所示,分析可知厂房振动
主频约为 41.8Hz。在应用 DASP 振动测试系统计算
特征模态的实际操作过程中,EFDD 法相对于 SSI
法来说识别速度明显较快,且操作更为简单,但需
要根据峰值人为判别特征模态,其精度受拾取峰值
时主观因素影响较大,而采用 SSI 进行分析时则可
自动判别相对稳定的特征模态。在选择模态识别方
法时可根据精度要求以及操作人员的经验来选取。
图 4 开机工况 EFDD 奇异值曲线图及 SSI 稳定图
Fig.4 EFDD singular value curve and SSI stablization diagram of start state
图 5 稳定运行工况 EFDD 奇异值曲线图及 SSI 稳定图
Fig.5 EFDD singular value curve and SSI stablization diagram of steady
state
表 2 所示为两种工况下分别采用 EFDD 和
SSI-Data 识别的泵站厂房模态参数,同一工况两种
方法的识别结果比较相近,相互验证了 EFDD 和
SSI-Data 方法在泵站方面应用的可行性及可靠性。
机组开机状态与稳定运行状态的模态参数略有差
异,因泵站结构和约束条件情况复杂,受水力、机
械以及电气等多种激励作用,暂时无法判断两种工
况所识别特征频率异同的原因,具体原因有待进一
步研究。
表 2 前四阶模态参数 Tab.2 First four order modal parameters
运行状态
(running
state)
阶数
(order)
频率(frequency)/Hz
EFDD SSI-Data
开机
(start state)
1 39.334 39.126
2 41.661 42.027
3 50.105 51.138
4 68.479 68.894
稳定运行
(Steady state)
1 34.922 35.194
2 41.997 41.603
3 50.561 50.643
4 73.416 73.764
4 有限元数值分析
2#机组和 3#机组段厂房之间的混凝土分缝将
整个泵站厂房结构分为两部分,将 3#和 4#机组段厂
房作为一个整体结构,建立有限元模型[36]。离散后,
3#、4#机组段厂房结构有限元模型有限元网格如图

第 期 秦全乐,等:基于振动测试和有限元法的泵站厂房模态识别 8
6 所示。泵站厂房各部位混凝土及基岩的材料参数
如表 3 所示。在有限元动力响应分析时,将水泵机
蹲的 2#测点采集得到的时程振动信号作为振动输
入荷载来分析计算,在厂房基础边界节点部位加三
向约束,将电机、水泵等金属设备作为荷载考虑。
图 6 3#、4#机组厂房结构有限元模型
Fig.6 Finite element model of powerhouse of 3# and 4# units
表 3 材料参数
Tab.3 Material parameters
部位
(site)
材料
(material)
杨氏模量
/GPa(young
modulus)
泊松比
(poisson
ratio)
密度
/kg/m3
(density)
吊车梁(crane beam) 混凝土
(concrete)(300#) 30.0 0.167 2500
进水管和厂房底板
(inlet pipe and floor
of powerhouse)
混凝土(concrete)
(150#) 22.0 0.167 2500
其他部位(other sites) 混凝土(concrete)
(200#) 25.5 0.167 2500
厂房基础
(powerhouse
foundation)
岩石(rock) 20.0 0.200 2700
表 4 所示为两种工况下 FEM 分析得到的泵站
厂房模态参数,该结果与基于现场振动测试的模态
分析结果基本吻合,由此进一步验证了将基于振动
响应测试的EFDD和 SSI-Data方法应用于泵站厂房
的模态识别的可行性及可靠性。
表 4 FEM 识别的前四阶模态参数
Tab.4 First four modal parameters identified by FEM
运行状态
(running state) 阶数(order) 频率(frequency)/Hz
开机
(start state)
1 39.389
2 42.233
3 51.379
4 68.953
稳定运行
(Steady state)
1 35.214
2 41.754
3 50.852
4 73.762
图 7 是稳定工况下 FEM 识别计算出的泵站厂
房前两阶振型位移云图,标尺单位为 m。可以看出,
1 阶振型位移云图中厂房上下游边墙、水泵机蹲及
主梁变形较大,其模态位移值可达 2.7-3.0mm,该
阶模态位移在机蹲部位影响范围较广。2 阶振型位
移云图中显示厂房上游电机机蹲主梁及水泵机蹲模
态位移较大,其中电机机蹲主梁模态位移值可达
4.7-5.3mm。分析可知该厂房易损位置主要位于上下
游边墙以及机蹲主梁处,可对该部位进行一定的加
固处理,以保证泵站安全运行。
(a)第 1 阶 (b)第 2 阶
(a)1st mode (b)2nd mode
图 7 3#和 4#机组段厂房结构部分振型位移云图
Fig.7 Vibration pattern displacement nephogram of powerhouse of 3# and 4# units

第 期 秦全乐,等:基于振动测试和有限元法的泵站厂房模态识别
9
5 结论
本文根据某泵站开机和稳定运行工况的振动观测数据,分别采用 EFDD 和 SSI 对实测
振动响应进行模态识别,并采用 FEM 分析了厂房结构的模态参数,分析了不同方法的优劣
性。总结如下:
(1)泵站厂房结构和约束条件情况复杂,受水力、机械以及电气等多种激励作用,在
FEM 建模与分析过程中存在许多不确定性和误差。本文所验证的基于现场振动测试的时、
频域模态识别方法可有效、可靠地应用于泵站厂房的模态识别,具有十分重要的工程应用价
值。
(2)EFDD 的分析识别速度与 SSI 相比明显较快,但需要根据峰值人为判别特征模态,
其精度受主观因素影响较大,而 SSI 方法可自动获取相对稳定的各阶模态。
参 考 文 献 (References)
[1]
Kim J T,Stubbs N.Damage localization in structures without baseline modal parameters[J].AIAA Journal,2012,34(8):
1644-1649. [2]
陈建群.基于信号分析的结构模态参数提取方法[D].长安大学,2009.(CHEN Jianqun.A modal parameter extraction method
of structure based on the signal processing[D].Chang'an University,2009(in chinese)). [3]
宗周红,褚福鹏,牛杰.基于响应面模型修正的桥梁结构损伤识别方法[J].土木工程学报,2013,46(2):115-122.(ZONG
Zhouhong,CHU Fupeng,NIU Jie.Damage identification methods of bridge structures using response surface based on finite
element model updating[J].China civil engineering journal,2013,46(2):115-122(in chinese)). [4]
Teughels A,Roeck G D.Structural damage identification of the highway bridge Z24 by FE model updating[J].Journal of Sound
and Vibration,2004,278(3):589-610. [5]
Sanghyun Choi , Sooyong Park , Norris Stubbs . Nondestructive damage detection in structures using changes in
compliance[J].International Journal of Solids and Structures.2005,42:4494-4513. [6]
公茂盛.基于强震记录的结构模态参数识别与应用研究[D].中国地震局工程力学研究所,2005.(GOMG Maosheng.Structural
Modal Parameters Identification and Application Based on Earthquake Response Data[D].Institute of engineering mechanics china
earthquake administration,2005(in chinese)). [7]
Frank Pai P,Palazotto A N.HHT-based nonlinear signal processing method for parametric and non-parametric identication of
dynamical systems[J].International Journal of Mechanical Sciences,2008,50:1619-1635. [8]
Cheng L,Zheng D J.The identification of a dams modal parameters under random support excitation based on the Hankel matrix
joint approximate diagonalization technique[J].Mechanical Systems and Signal Processing,2014,42(1-2):42-57. [9]
张辉东,周颖,练继建.一种水电厂房振动模态参数识别方法[J].振动与冲击,2007,26(5):115-118.(ZHANG Huidong,
ZHOU Ying,LIAN Jijian.A method based on armamodel formodal parameter identification of a power house[J].Journal of
vibration and shock,2007,26(5):115-118(in chinese)).
[10] 程琳,杨杰,郑东健,任杰.基于强震观测和ARMAV模型的混凝土坝模态识别[J].振动与冲击,2017,36(8):224-230.(CHENG
Lin,YANG Jie,ZHENG Dongjian,REN Jie.Modal identification of concrete dams based on strong-motion records and an
ARMAV model[J].Journal of vibration and shock,2017,36(8):224-230(in chinese)). [11]
Xiao X,Ren WX.Improved data-driven stochastic subspace identification of online operational modal parameters[J].Journal of
Vibration & Shock,2009,28 (8):148-153
[12
] 张振华,贺旭东,陈怀海.利用快速子空间跟踪的时变模态参数识别[J].应用力学学报,2018,35(2):423-427.(ZHANG
Zhenhua,HE Xudong,CHEN Huaihai.Time-varying modal parameter identification using fast subspace tracking[J].Chinese
Journal of Applied Mechanics,2018,35(2):423-427(in chinese)). [13]
叶锡钧,颜全胜,李健,等.基于环境激励的大跨度斜拉桥模态参数和索力识别[J].振动与冲击,2012,31 (16):157-163.(YE
Xijun,YAN Quansheng,LI Jian,et al.Modal identification and cable tension estimation of long span cable-stayed bridge based
on ambient excitation[J].Journal of vibration and shock,2012,31 (16):157-163(in chinese)).
[14] 王海军,郑韩慈,周济芳.水电站厂房结构密集模态识别研究[J].水力发电学报,2016,35(02):117-123.(WANG Haijun,
ZHENG Hanci,ZHOU Jifang.Study on modal identification of powerhouse structures with closely spaced modes[J].Journal of
Hydroelectric Engineering,2016,35(02):117-123(in chinese)). [15]
Bendat J S,Piersol A G.Engineering applications of correlation and spectral analysis[M].New York:Wiley-Interscience,1980. [16]
Van der Auweraer H,Guillaume P,Verboven P,et al.Application of a fast-stabilizing frequency domain parameter estimation
method [J].Journal of Dynamic Systems,Measurement,and Control,2001,123(4):651-658. [17]
Peeters B,Guillaume P,van der Auweraer H,et al.Automotive and aerospace applications of the polymaxmodal parameter
estimation method[C].Proceedings ofIMAC,Dearborn(ML),USA,Jan,2004:26-29. [18]
Prevosto M.Algorithmes d'identification des caractéristiques vibratoires de structures mécaniques complexes [D].Rennes:INRIA
de Rennes,Université de Rennes 1,1982. [19]
Brincker R,Ventura C,Andersen P.Damping estimationby frequency domain decomposition [C]. Proceedings ofthe 19th
International Modal Analysis Conference(IMAC),San Antonio,Texas,Feb.7-10,2000:698-703. [20]
Akaike H.Power spectrum estimation through autoregressive model fitting [J].Annals of the Institute of Statistical Mathematics,
1969,21(1):407-419. [21]
Ibrahim S R,Mikulcik E.A method for the direct identification of vibration parameters from the free response [J].The Shock and

第 期 秦全乐,等:基于振动测试和有限元法的泵站厂房模态识别
10
Vibration Bulletin,1977,47(4):183-198.
[22] Ibrahim S R.An upper Hessenberg sparse matrix algorithm for model identification on minicomputer[J].Journal of Sound and
Vibration,1987,113(1):47-57. [23]
Brown D L,Allemang R J,Zimmerman R,et al.Parameter Estimation Techniques for Modal Analysis[J].SAE Paper,No.790221,
SAE Trans,1979,1:828-846. [24]
Vold H,Rocklin G T.The Numerical Implementation of a Multi-input Modal Estimation Method for Minicomputers [C].Orlando,
FL,USA:Proceedings of the 1st International Modal Analysis Conference(IMAC),1982:542-548. [25]
Cole H A.On-Line Failure Detection and Damping Measurement of Aerospace Structures by the Random Decrement
Signatures[J].1973. [26]
James G H,Came T G,Edmunds R S.STARS Missile-Modal Analysis of First-Flight Data Using the Natural Excitation
Technique[C].Proceedings of the 12th International Modal Analysis Conference(IMAC),1994. [27]
He X,Moaveni B,Conte J,et al.Comparative study of system identification techniques applied to New Carquinez Bridge
[C].Proceedings of the International 3rd Conference on Bridge Maintenance,Safety and Management (IABMAS 2006),Porto,
Portugal,2006:259-260. [28]
Juang J N.Applied system identification [M].Prentice Hall,1994. [29]
Peeters B,de Roeck G,Pollet T,et al.Stochastic subspace techniques applied to parameter identification of civil engineering
structures[C].Proceedings of the International Conference MV2.Lyon,France,1995:151-162. [30]
Van Overschee P,De Moor B.Subspace Algorithms for the Stochastic Identification Problem[C].Proceedings of the 30th IEEE
Conference on Decision and Control,1991,1321-1326.
[31] Huang N E,Shen Z,Long S R,et al.The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary
time series analysis [J].Proceedings of the Royal Society of London Series A:Mathematical,Physical and Engineering Sciences,
1998,454(3):903-995.
[32] Grossmann A,Morlet J.Decomposition of Hardy Function into Square Integrable Wavelet of Constant Shape[J].SIAM J.of Math,
Anal,1984(4):723-736. [33]
Ying H Q,Liu J M,Shen S.Precise output-only modal parameter identification from power spectrum[C].Proceedings of the 24th
International Modal Analysis Conference (IMAC),2006:477-483. [34]
G Zhang,B Tang,G Tang.An improved stochastic subspace identification for operational modal analysis[J].Measurement,2012,
45 (5):1246-1256.
[35] 仝飞,程琳,杨杰,郑东健,陈诗怡.基于强震观测的拱坝模态参数识别的对比研究[J].地震工程与工程振动,2017,37(02):
37-46.(TONG Fei,CHENG Lin,YANG Jie,ZHENG Dongjian,CHEN Shiyi.The comparative research of identification of modal
parameters on arch dam based on strong earthquake observation records[J].Earthquake engineering and engineering dynamics,
2017,37(02):37-46(in chinese)). [36]
陈火红,杨剑,薛小香,王朋波.新编 Marc 有限元实例教程[M].机械工业出版社,2007.(CHEN Huohong,YANG Jian,
XUE Xiaoxiang.New finite element example course of Marc[M].China machine press,2007(in chinese)).






![CMW-XXXX 取付方法...CMW-XXXX 取付方法 取付枠不要タイプのコンセントモジュール取付方法 Title Microsoft PowerPoint - CNM-SNPIN取付方法.ppt [互換モード]](https://static.fdocument.pub/doc/165x107/607b7a3188bc8f23352b2a2c/cmw-xxxx-cmw-xxxx-effffffff.jpg)