Biomechanics of golf for bridging the gap -...
12
20 th July, ISBS2016 Applied Sessions Biomechanics of golf for bridging the gap Key principles in biomechanically good golf swings In spite of its popularity, golf largely remains as an under-researched sport and the biomechanics of golf swing has not been fully understood yet. While more new research findings are becoming available, golf instructors still rely primarily on their experience and, therefore, there exists a wide gap between science and practice. In this applied session, key elements of mechanically good golf swings will be presented along with the latest research findings, various examples, and practice drills that promote good biomechanics. Evidence-based rehabilitation practices and cases will be also presented. Organizer Dr. Young-Hoo Kwon Dr. Kwon is Professor of Kinesiology at Texas Woman's University, Denton, Texas, USA and Director of its Biomechanics Laboratory. He has been recognized by golf community as one of the leading authorities in the area of golf biomechanics. He has conducted biomechanical research on golf swing for last 6-7 years. He is currently providing swing analysis services to professional tour players and elite amateur players and has collected data on numerous elite professional and amateur players. One of his main interest areas is instructor education and he has given numerous Golf Biomechanics Certification Courses internationally. 2015 alone, over 400 golf professionals from 30 countries have taken Dr. Kwon's Golf Biomechanics course. Speakers Force and moment exerted by each hand on an instrumented golf club Dr. Sekiya Koike He received his Ph.D. in Engineering from Tokyo Institute of Technology. He is an associate professor for biomechanics at University of Tsukuba in the Faculty of Health and Sport Sciences. His research interests are quantifications of motion generating
Transcript of Biomechanics of golf for bridging the gap -...

20th
July, ISBS2016 Applied Sessions
Biomechanics of golf for bridging the gap
Key principles in biomechanically good golf swings
In spite of its popularity, golf largely remains as an under-researched sport and the
biomechanics of golf swing has not been fully understood yet. While more new research
findings are becoming available, golf instructors still rely primarily on their experience
and, therefore, there exists a wide gap between science and practice. In this applied
session, key elements of mechanically good golf swings will be presented along with the
latest research findings, various examples, and practice drills that promote good
biomechanics. Evidence-based rehabilitation practices and cases will be also
presented.
Organizer
Dr. Young-Hoo Kwon
Dr. Kwon is Professor of Kinesiology at Texas Woman's University,
Denton, Texas, USA and Director of its Biomechanics Laboratory.
He has been recognized by golf community as one of the leading
authorities in the area of golf biomechanics. He has conducted
biomechanical research on golf swing for last 6-7 years. He is
currently providing swing analysis services to professional tour
players and elite amateur players and has collected data on numerous elite professional
and amateur players. One of his main interest areas is instructor education and he has
given numerous Golf Biomechanics Certification Courses internationally. 2015 alone,
over 400 golf professionals from 30 countries have taken Dr. Kwon's Golf Biomechanics
course.
Speakers
Force and moment exerted by each hand on an
instrumented golf club
Dr. Sekiya Koike
He received his Ph.D. in Engineering from Tokyo Institute of
Technology. He is an associate professor for biomechanics at
University of Tsukuba in the Faculty of Health and Sport Sciences.
His research interests are quantifications of motion generating

20th
July, ISBS2016 Applied Sessions
mechanism for evaluation and improvement of sports skill as well as for selection and
design of sports equipment.
Teaching Sport Physical Therapy and Joint
Biomechanics in Japan
Dr. Kazuyoshi Gamada
After he received his Ph.D. from the University of Tokyo, he spent
2 years at University of Colorado and one year at University of
Florida, and joined Hiroshima International University in 2006. He
also earned physical therapy license in Japan in 1995. He served
as a PT of the Japanese delegation at Atlanta (1996) and Sydney
(2000) Olympic Games. He has special interests in joint malalignment and abnormal
kinematics, proposed “The Realign Concept” to be used in therapy, training and
prevention of acute and chronic athletic injuries, invented ReaLine devices, and
founded Japanese Society for Wellness and Preventive Medicine.

BRIDGING THE GAP: KEY PRINCIPLES IN BIOMECHANICALLY GOOD GOLF SWINGS
Young-Hoo Kwon and Kihoon Han Biomechanics Laboratory, Texas Woman’s University, Denton, Texas, USA
The purpose of this presentation was to provide an overview of key principles of biomechanically good golf swings and focus areas that have received substantial attention lately, such as the foot-ground interaction and the functional swing plane-based kinematic sequence analysis. More field-based research is required to develop a holistic understanding of the mechanics in good golf swings. Employment of realistic swing models and development of meaningful research questions and analysis methods in close consultation with golf practitioners is essential in the process.
KEYWORDS: evidence-based practice, functional swing plane, functional double pendulum, kinematic sequence.
INTRODUCTION: While numerous studies have been published on golf biomechanics over last 4-5 decades, a wide gap between science and practice still exists. Golf is a highly individualized sport and golf skill development is largely driven by instructors’ experiences and preferences than scientifically validated facts and evidences. Thus, there is an ample room for improvement in terms of evidence-based practice. A majority of biomechanical studies published previously, however, have based on simple planar double-pendulum model or its variations. While these studies allowed scientists to understand some key biomechanical/mechanical concepts such as “body-to-club energy transfer” and “effects of delayed release,” the swing models employed were not complex enough to address the real issues practitioners are facing. Research findings are not well utilized in golf instruction due to weak instructor training infra structures. To narrow the gap between science and practice, more realistic swing models should be employed and more field-oriented practical and meaningful research questions should be developed in consultation with golf practitioners. The main task for sport biomechanists is to develop a holistic big picture understanding of key principles of biomechanically good golf swings through field-based research working with golf practitioners. The purpose of this presentation is to provide an overview of key biomechanical principles and focus area that have received substantial attention lately. FUNCTIONAL SWING PLANE: The functional swing plane (FSP) is the plane of motion of the club near the impact and is computed from the clubhead trajectory through a least-square fitting. Unlike other popular definitions of swing plane (mostly reference planes or body lines), FSP is a mechanically meaningful plane computed directly from the motion of the club in each swing. The FSP properties (slope, direction, and impact point on the plane) characterize golfer’s swing (Figure 1). For example, slope of the FSP is closely related to the swing style of the golfer: arm-driven vs. body-driven. Projection to the FSP of the trajectories of the clubhead and key body points such as the lead hand and shoulder allows dissection of the motions into the on-plane motions on the FSP and the off-planes motions away from/toward the FSP (Figure 1). Based on the off-plane motion pattern, several distinct swing styles have been identified: such as planar swing, spiral swing, and reverse spiral swing (Figure 2). FOOT-GROUND INTERACTION: One area that has received a substantial amount of attention recently is the effects of the foot-ground interaction on development of the angular motion of golfer’s body. One main goal in a golf swing is to develop a large clubhead speed through angular motions of the body while maintaining control. The ground reaction force (GRF) and the ground reaction moment (GRM) acting on the body during the swing are the sole sources of angular momentum for the golfer-club system and the quality of the foot-ground interaction (i.e. magnitude, direction, and point of action of the GRF) thus is a key factor for a biomechanically good golf swing.

Figure 1. Properties (direction and slope) of a functional swing plane (FSP). The projected clubhead trajectory visualizes the on-plane and off-plane motion of the club.
Figure 2. Swing styles classified based on the deviation of the clubhead trajectory from the functional swing plane (FSP): planar (A), spiral (B), and reverse spiral (C).
Moments are generated through three different mechanisms: GRF moment produced by the combined GRF about the center of mass (CM), pivoting moment produced by the individual GRFs about the combined center of pressure (COP), foot contact moments through the direct rotational foot-ground interaction. The main source of moment in the frontal plane of the body is the GRF moment while that in the transverse plane is the pivoting moment (Figures 3 & 4). It is ideal to use a movement pattern that allows early development of the frontal-plane GRF moment and pivoting moment during the backswing-downswing transition. While the pivoting moment pattern about the combined CP remains fairly similar across golfers, the frontal-plane GRF moment pattern varies significantly. Swing styles can also be classified based on the way the frontal-plane GRF moment is produced: moment arm-dominant, force-dominant, hybrid (moment arm and force), and double-peak patterns. The quality of the foot-ground interaction is ultimately determined by the unbalanced actions of the leg muscles. As a result, pelvis motion, lateral tilt in particular, is a good indicator of the quality of the foot-ground interaction (Figure 5). A good foot-ground interaction is a key ingredient of the so-called ground-up swing. FUNCTIONAL DOUBLE-PENDULUM AND KINEMATIC SEQUENCE: The functional double pendulum (FDP) model differs from the original model in several aspects. Firstly, the “moving” hub is located near the mid-trunk area where the FSP passes through and the upper lever consists of the thorax, shoulder girdles, and the arms. The length and position of the upper lever are determined by the motions of the thorax, shoulder girdles, and the arms.

Figure 3. The main moments generated about the body CM through the foot-ground interaction: frontal-plane GRF moment (A) and transverse-plane pivoting moment (B). Symbols: F (force), d (moment arm), C (combined), L (lead side), and T (trail side).
Figure 4. Ensemble average moment patterns of a male professional tour player (driver): frontal-plane GRF moment (red) and pivoting moment (gray). While the sagittal-plane GRF moment is reasonably large near the impact, its pattern is not consistent across golfers.
Figure 5. Ensemble average patterns of pelvis motion of a male professional tour player (driver): linear (A) and angular (B). The patterns were presented as the offset from the setup position.
The angular positions and velocities of the upper lever, lower lever, hip line, and shoulder line during the swing can be quantified on the FSP (Figure 6). The kinematic sequence can be examined in the perspective of proximal-to-distal transition sequence, the timing and magnitude of the peak angular velocities, changes in the peak angular velocities, and wrist lag angular velocity (i.e. delayed wrist release) (Figure 7). No x-factor or stretch measures are meaningfully associated with the clubhead speed in elite golfers.
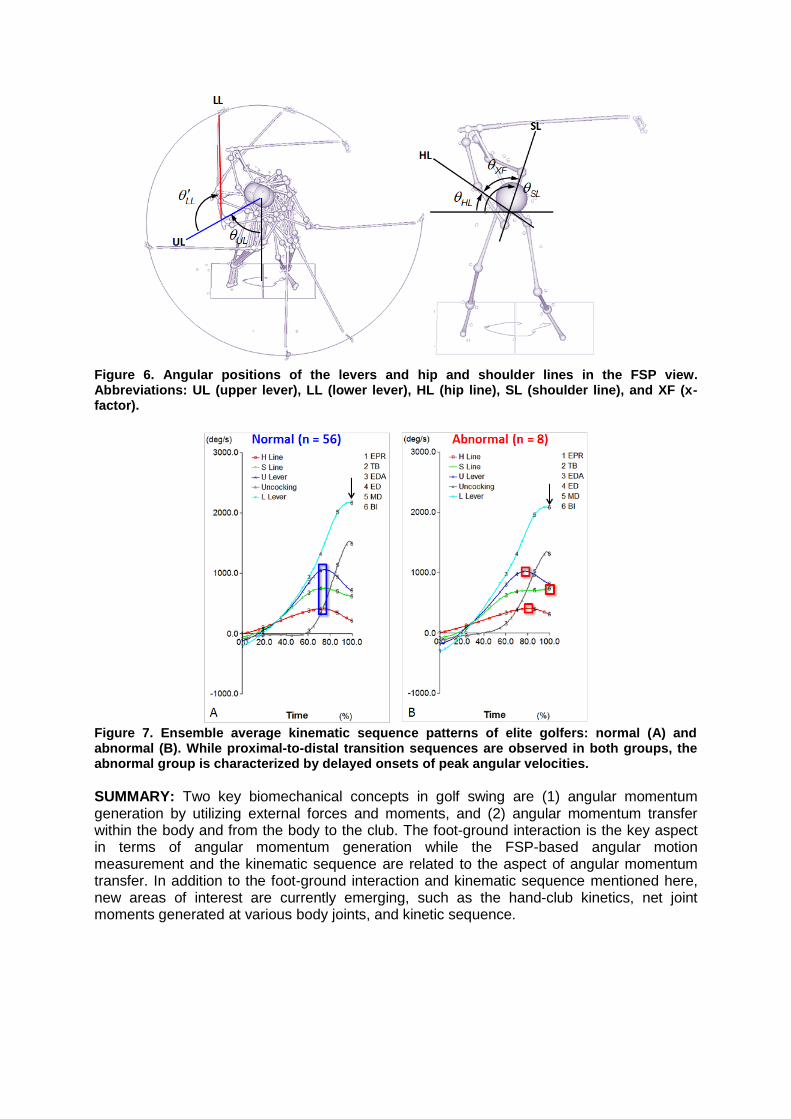
Figure 6. Angular positions of the levers and hip and shoulder lines in the FSP view. Abbreviations: UL (upper lever), LL (lower lever), HL (hip line), SL (shoulder line), and XF (x-factor).
Figure 7. Ensemble average kinematic sequence patterns of elite golfers: normal (A) and abnormal (B). While proximal-to-distal transition sequences are observed in both groups, the abnormal group is characterized by delayed onsets of peak angular velocities.
SUMMARY: Two key biomechanical concepts in golf swing are (1) angular momentum generation by utilizing external forces and moments, and (2) angular momentum transfer within the body and from the body to the club. The foot-ground interaction is the key aspect in terms of angular momentum generation while the FSP-based angular motion measurement and the kinematic sequence are related to the aspect of angular momentum transfer. In addition to the foot-ground interaction and kinematic sequence mentioned here, new areas of interest are currently emerging, such as the hand-club kinetics, net joint moments generated at various body joints, and kinetic sequence.

FORCE AND MOMENT EXERTED BY EACH HAND ON AN INSTRUMENTED GOLF CLUB
Sekiya Koike
Faculty of Health and Sport Sciences, University of Tsukuba, 1-1-1 Ten-nodai, Tsukuba, Ibaraki, Japan
This article shows an issue of the analysis on golf swing motion, and then introduces an instrumented golf club as a solution for the issue. During the golf swing motion, the upper limbs and a club make a closed multi-segment loop, where it is impossible to calculate the forces and moments exerted by each hand via inverse dynamics due to the kinetic redundancy of the closed loop system. An instrumented grip handle equipped with twelve sets of strain gauges was designed to measure the forces and moments exerted by each hand. The results of kinetic analysis for a professional golf instructor indicates that 1) the force exerted along the club shaft by the grip-end side hand shows significant large values toward the ball impact, and 2) the forces exerted by both hands in the axes that are perpendicular to the club shaft show coupled force patterns.
KEY WORDS: golf swing, closed loop problem, kinetics of the upper limbs, grip handle INTRODUCTION: Golfers swing a golf club to launch a golf ball into their target points. During the golf swing motion, the upper limbs and a club make a closed multi-segment loop. Since the degrees of freedom (DOFs) of club’s movement is six (3 in translation and 3 in rotation) and the DOFs of both hands’ kinetics is totally twelve (3 in force and 3 in moment per each hand), six DOFs of kinetic redundancy exist. In such case, there exist infinite sets of force and moment that realize the same movement of the club. Therefore, it is essentially impossible to calculate the forces and moments exerted on the grip handle of the club by each hand via inverse dynamics with only visual information; such as about movements of the club and the upper limb segments. This issue is called “closed loop problem” (Vaughan et al., 1982a, 1982b). The only way to obtain such kinetic information is to measure them directly (Koike et al., 2006). This article introduces an instrumented golf club as a solution for the closed loop problem in the analysis of golf swing motion, and shows an example of analysis result using the instrumented club.
METHODS: Figure 1(a) shows an overview of an instrumented golf club consisting of an instrumented grip handle, shaft and club head. Figure 1(b) shows the structure of the instrumented grip handle which contains an aluminum alloy bar and two sets of covers. Twelve sets of strain gauges were attached on the bar to measure the torsional moments exerted at sensors g and h, the bending moments exerted at sensors a, c, d and f, and the longitudinal forces exerted at sensors b and e. The individual sets of strain gauges were calibrated under static load conditions. Although the forces and moments exerted by each hand on the club are distributed over the handle area, these loads were represented by vectors under the assumption that they act at the fixed points of the hands in swing motion. The force and moment acted on the fixed point of each palm are calculated from static equilibrium equations with respect to forces and moments obtained by using the strain gauges (Koike et al., 2006). The inertial forces of the handle pieces were neglected. As the location of the strain gauges are concentrated into the grip handle part, it is possible to connect the grip handle with several types of clubs. A right-handed professional golf instructor, who volunteered to participate in this study, performed swings with a driver. Kinematic data were obtained with a motion capture system (VICON-MX; 250 Hz). Kinetic data of the individual hands were measured with the instrumented club (28 strain gauges; 1000 Hz). Kinetic data of the individual feet were measured with three force platforms (9281 [ 2], 9287, Kistler Inst.; 1000Hz). A forward swing phase was defined as a period from the top of swing to the ball impact.

RESULTS AND DISCUSSION: Figure 2 shows an example of kinetics of each hand during the forward swing motion. Fig.2 (a), (b) and (c) show the forces in xsp axis, the forces in ysp
axis, and the moments about zsp axis, respectively. The blue solid and green dashed lines represent the components of forces exerted by the head side hand and grip-end-side hand, respectively. These values were expressed in the instantaneous plane coordinate system of the golf club (Vaughan, 1981). The time curve of the xsp–axial forces of the hands showed approximately coupled force. The coupled force, which accelerates the angular motion of the club, increased gradually until -0.1 sec, and then decreased rapidly toward the impact. The longitudinal force of the grip-end side hand increased toward the impact and showed significantly large value compared to that of the head side hand. The moment of the grip-end side hand about zsp axis showed positive values, which accelerates the forward angular motion of the club, until -0.05sec, and then showed negative values toward the impact. The moment of the head side hand showed positive values from about -0.1 sec to the impact. These results indicate that the longitudinal force along the grip handle exerted by the grip-end side hand would be a great contributor to the generation of the club head speed because the force shows the largest value compared to other components of exerting forces of the individual hands.
(a). Overview of the club
(b). Structure of the grip handle
Figure 1: Instrumented golf club.
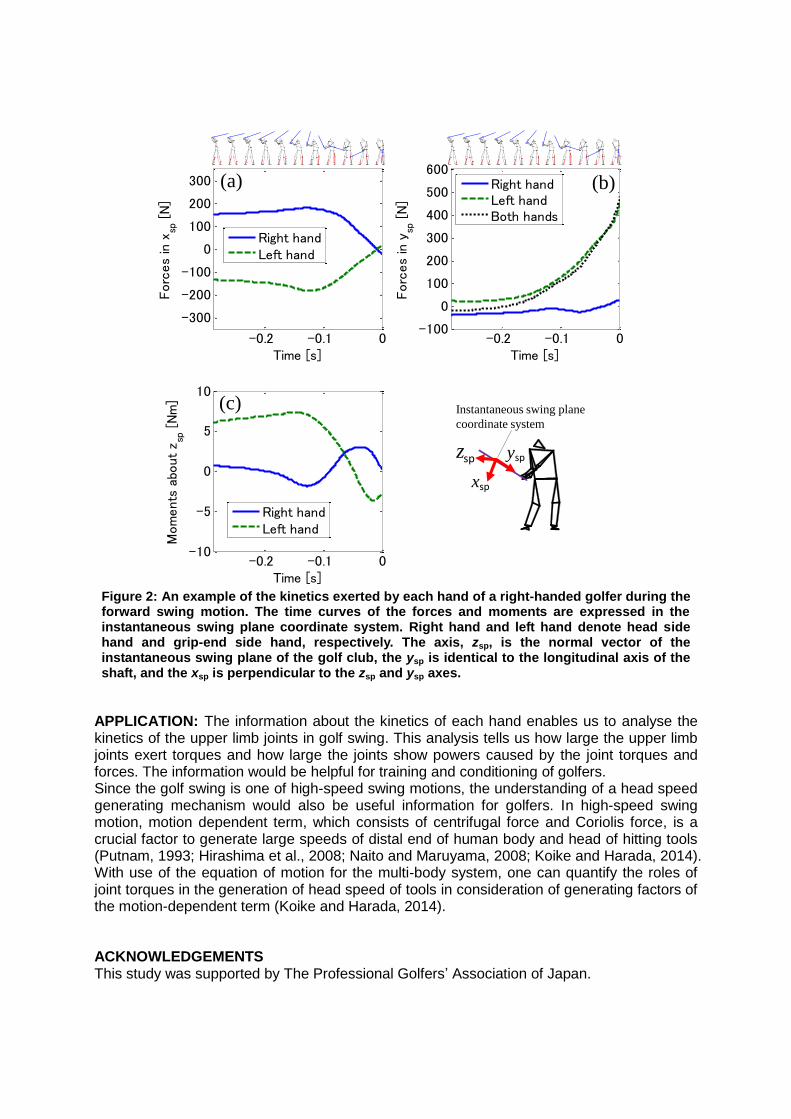
APPLICATION: The information about the kinetics of each hand enables us to analyse the kinetics of the upper limb joints in golf swing. This analysis tells us how large the upper limb joints exert torques and how large the joints show powers caused by the joint torques and forces. The information would be helpful for training and conditioning of golfers. Since the golf swing is one of high-speed swing motions, the understanding of a head speed generating mechanism would also be useful information for golfers. In high-speed swing motion, motion dependent term, which consists of centrifugal force and Coriolis force, is a crucial factor to generate large speeds of distal end of human body and head of hitting tools (Putnam, 1993; Hirashima et al., 2008; Naito and Maruyama, 2008; Koike and Harada, 2014). With use of the equation of motion for the multi-body system, one can quantify the roles of joint torques in the generation of head speed of tools in consideration of generating factors of the motion-dependent term (Koike and Harada, 2014). ACKNOWLEDGEMENTS This study was supported by The Professional Golfers’ Association of Japan.
-0.2 -0.1 0
-300
-200
-100
0
100
200
300
Time [s]
Forc
es
in x
sp [
N]
Right handLeft hand
-0.2 -0.1 0-100
0
100
200
300
400
500
600
Time [s]
Forc
es
in y
sp [
N]
Right handLeft handBoth hands
-0.2 -0.1 0-10
-5
0
5
10
Time [s]
Mom
ents
abo
ut
z sp [
Nm
]
Right handLeft hand
(a) (b)
(c) Instantaneous swing plane
coordinate system
xsp
yspzsp
Figure 2: An example of the kinetics exerted by each hand of a right-handed golfer during the forward swing motion. The time curves of the forces and moments are expressed in the instantaneous swing plane coordinate system. Right hand and left hand denote head side hand and grip-end side hand, respectively. The axis, zsp, is the normal vector of the instantaneous swing plane of the golf club, the ysp is identical to the longitudinal axis of the shaft, and the xsp is perpendicular to the zsp and ysp axes.

REFERENCES: Hirashima M, Yamane K, Nakamura Y, Ohtsuki T. (2008). Kinetic chain of overarm throwing in terms of joint rotations revealed by induced acceleration analysis. Journal of Biomechanics, 41, 2874-2883. Koike S, Iida H, Shiraki H, Ae M. (2006). An instrumented grip handle for golf clubs to measure forces and moments exerted by each hand during swing motion. The Engineering of Sport 6, 1, 137-142. Koike S, Harada Y. (2014). Dynamic contribution analysis of tennis-serve-motion in consideration of torque generating mode. Procedia Engineering, 72, 97- 102. Naito K, Maruyama T. (2008). Contributions of the muscular torques and motion-dependent torques to generate rapid elbow extension during overhand baseball pitching. Sports Engineering, 11, 47-56. Putnam AC. (1993). Sequential motions of body segments in striking and throwing skills: Description and explanations. Journal of Biomechanics, 26, 125-135. Vaughan CL, Hay JG, Andrews JG. (1982a) Closed loop problems in biomechanics. Part I -A classification system. Journal of Biomechanics, 15, 197-200. Vaughan CL, Hay JG, Andrews JG. (1982b) Closed loop problems in biomechanics. Part II -An optimization approach. Journal of Biomechanics, 15, 201-210. Vaughan CL. (1981) A three-dimensional analysis of the forces and torques applied by a golfer during the downswing. Biomechanics VII-B, 325-331.

Concept and Method of Performance Enhancement for Golfers
Kazuyoshi Gamada1
Faculty of Rehabilitation, Hiroshima International University,
555-36 Kurosegakuendai, Higashi hiroshima City, Hiroshima, Japan1
A good golf swing must have a repeatable swing plane, a stable axis of rotation, and high velocity at the club head. It requires neuromuscular coordination to make a simple swing plane, while increasing angular velocity of the golf club. Muscle strength is required to mobilize several joints create pelvic rotation (i.e. horizontal plane) while stabilizing other joints. Lack of sufficient joint range of motion causes compensatory movements, resulting in unstable swing plane and/or potential injuries. For example, it requires nearly 180 degrees of neck rotation during a golf swing, which most of amateur golfers do not have. Therefore, a conditioning strategy for golfers must be designed to improve range of motion, muscle function, and neuromuscular coordination.
KEY WORDS: conditioning, golf swing, range of motion, muscle function INTRODUCTION: A good golf swing must have a repeatable swing plane, a stable axis of rotation, and high velocity at the club head. It requires neuromuscular coordination to make a simple swing plane, while increasing angular velocity of the golf club. Muscle strength is required to mobilize several joints create pelvic rotation (i.e. horizontal plane) while stabilizing other joints. Lack of sufficient joint range of motion causes compensatory movements, resulting in unstable swing plane and/or potential injuries. For example, it requires nearly 180 degrees of neck rotation during a golf swing, which most of amateur golfers do not have. Therefore, a conditioning strategy for golfers must be designed to improve range of motion, muscle function, and neuromuscular coordination.
Improving range of motion requires adequate skeletal alignment. For example, improving thoracic rotation requires adequate thoracic alignment, intra-thoracic mobility, sagittal alignment of the thoracic spine. Static and/or dynamic stretching as well as functional exercises may contribute to increase the overall rotational range of motion of the thoracic spine. However, modification of the thoracic alignment and improvement of intra-thoracic mobility in adult is sometimes difficult. Another joint that requires greater range of motion is the hip joint. Hip range of motion may be limited by various soft tissues such as subcutaneous tissue, superficial fascia, deep fascia, inter-muscular adhesions, or adhesions of bursae around the hip. Therefore, a manual release of these adhesions may be necessary to improve hip range of motion. Therefore, a special attention on malalignment and soft tissue adhesion is required. The Realign Concept (Gamada 2014) was developed from rehabilitation of injured athletes and is applied to therapy for joint injuries, athletes’ training, and injury prevention. It emphasizes the importance of realigning each joint and restoring normal joint kinematics. For example, many female Japanese do not have normal screw-home movement of the knee due to a limitation of tibial internal rotation range in knee flexion. This abnormal kinematics may be insidious until the knee is injured, and affect functional recovery by preventing the knee from restoring normal knee kinematics, resulting in delayed return to sports. Accordingly, the first step of the Realign Concept is called the realigning phase which emphasizes the restoration of the normal joint alignment and improving range of motion. By achieving these two components, optimal joint motion is restored, so that the muscles around the joint works without compromising abnormal joint function. The second step is called the stabilizing phase, in which the muscles are trained to maintain the acquired normal joint kinematics under strenuous activities. The third step is called the coordinating phase, in which neuromuscular control is retrained while maintaining optimal joint alignment, mobility and stability. The Realign Concept can be directly applied to the golf conditioning and we developed the Realign Golf Project (wwe.realinegolf.com). It consists of an educational program for trainers, conditioning program for golfers, and devices to help achieving optimal alignment. The

certifications are provided by Japanese Society for Wellness and Preventive Medicine (JSWPM) and the conditioning program is organized by a private company. METHODS: The ReaLineGolf program was developed based on the Realign Concept and designed specifically for golfers to enhance performance and prevent injuries. In the realigning phase, the foot, ankle, knee joints as well as the sacroiliac joints in the pelvis are realigned to improve stability with small motion during a golf swing, whereas hip, thoracic spine, shoulder joints are realigned to improve alignment and range of motion. We use exercise devises as well as manual release techniques are used as necessary. The goal of the realigning phase is to restore the range of motion that is sufficient for the optimal golf swing, so that the compensatory movements are minimized. In the stabilizing phase, the hip rotators (i.e. the gluteus maximus, piriformis, etc.) and thoracic and cervical rotators (i.e. multifidus) are the primary target among movers, while lower abdominal muscles are the most important stabilizers to prevent spinal extension or side bending during the back swing. Before advancing to the coordinating phase, inhibiting the muscles that causes abnormal kinetic chain is required as a part of the stabilizing phase. For the right handed golfer, inhibiting the left shoulder abductors while extending the elbow during the downswing is important to prevent chicken winging or early separation of the left upper arm from the trunk. Similarly, inhibiting the right hip abductors is necessary to prevent pelvic sliding to the left during the downswing. Instead, activation of the right gluteus maximus is required. Once the mobility is improved and optimal muscle activation and inhibition patterns are acquired, the coordinating phase would be straightforward. SUMMARY: Improving the golf swing may be considered an art of coaching. The ReaLineGolf project made it a step-by-step process that can be achieved by a trainer, therapist, or coach. The art of ReaLineGOLF lies in correcting malalignment and eliminating soft tissue adhesion. Although the devices help to restore alignment, adhesion must be manually taken care of, which limits standardization of this concept.