数控进给伺服系统建模及智能摩擦补偿研究 · 数控进给伺服系统是数控装置与机床本体间的 电传动联系环节,是数控系统的执行部分。数控机床的性能很大程度上取决于进给伺服系统的性能。
Click here to load reader
description

第二章 控制系统的数学模型 第二章 控制系统的数学模型 第二章 控制系统的数学模型 第二章 控制系统的数学模型
2.1 数学模型基础2.2 线性系统的微分方程
2.3 线性系统的传递函数
2.4 系统的结构图
2.5 信号流图及梅逊公式
End
本章作业

1. 定义:数学模型是指出系统内部物理量(或变量)之间动态关系的表达式。
2.1 2.1 数学模型基础数学模型基础2.1 2.1 数学模型基础数学模型基础2.5
2. 建立数学模型的目的 ● 建立系统的数学模型,是分析和设计控制系统的首要工作(或基础工作)。 ● 自控系统的组成可以是电气的、机械的、液压或气动的等等,然而描述这些系统发展的模型却可以是相同的。因此,通过数学模型来研究自动控制系统,可以摆脱各种不同类型系统的外部特征,研究其内在的共性运动规律。
2.2 2.3 2.4

3. 建模方法
微分方程(或差分方程) 传递函数(或结构图) 频率特性 状态空间表达式(或状态模型) 5. 由数学模型求取系统性能指标的主要途径
求解 观察线性微分方程 性能指标
传递函数
时间响应
频率响应
拉氏变换 拉氏反变换估算 估算
计算
傅氏变换 S=jω
频率特性
4. 常用数学模型
机理建模(分析法)--本课程介绍
辨识建模(实验法)--系统辨识课程介绍

2.2.1 微分方程的列写
dtic
Riru 11
11
1 dtiC
uc 11
1
rcc uu
dt
duCR 11,得化简
2.2 2.2 控制系统时域数学模型(机理建模)控制系统时域数学模型(机理建模)2.2 2.2 控制系统时域数学模型(机理建模)控制系统时域数学模型(机理建模)
R1
C1
i1 (t)
ur
(t)
uc
(t)
微分方程的列写步骤
1 )确定系统的输入、输出变量; 2 )从输入端开始,按照信号的传递顺序,根据各变量所遵循的物理定理写出各微分方程; 3 )消去中间变量,写出输入、输出变量的微分方程; 4 )变换成标准形式。
2.5
2.1
2.3
2.42.2.2 2.2.3 2.2.4

• 试列写质量 m 在外力 F 作用下位移 y(t) 的运动方程。
dt
tdyftF
)()(1
)()(2 tkytF
)()()()(
212
2
tFtFtFdt
tydm
)()()()(
2
2
tFtkydt
tdyf
dt
tydm
)()()()(
tutRitudt
tdiL rc
dttic
tuc )(1
)(
)()()()(
2
2
tutudt
tduRC
dt
tudLC rc
cc
例 2.1 图为机械位移系统。
R L
C
i(t)
ur
(t)uc
(t)
F
y(t)
k
f
m
• 例 2.2 如图 RLC 电路,试列写以 ur(t) 为输入量, uc(t) 为输出量的网络微分方程。
整理得 :
解 : 阻尼器的阻尼力 :弹簧弹性力 :
• 解 :
返回

已知 : 流入量 Qi, 流出量 Qo, 截面 A; 液位 H 求 : 以 Qi 为输入, H 为输出的系统动态方程式 .
解 : 根据物质守恒定律
消中间变量 Qo, 根据流量公式:
线性关系:
HQ2000Ra 0,层流,线性关系,
dtQQAdH i 0
HQ3000,Ra 0紊流,非线性关系,
Qi
QoA
H
例2 . 3 液位系统 ---- 单容水箱
iQHRdt
dHA
1
1
0Q
HR定义液阻

为增量方程dtqqAdh i 0
0qRh增量关系近似为
dtqQqQhHAd i )()( 0程工作点附近物料平衡方
20
1QH
Q
HQ
2
dQ
dH
q
hR
20
00
流量变化液位差变化
液阻定义
iqhRdt
dhA
1方程线性化的系统增量动态
线性关系:
非线性关系: 11
0i Q
HRQH
Rdt
dHA 液阻 ,
HQ 0
在工作点( H,Q )附近,对微小变化可用线性方程近似,即微小变化之间的关系是线性关系,线性化。

例2 . 4机电系统微分方程:电枢电压控制直流电动机
电枢回路电压平衡方程
)()()()(
tutEtiRdt
tdiL aaaa
aa
SM 负载mJ
aE
aRm
au
aLmf
ai
CM
原理: ua ia Mm ωm
电枢回路 定子转子电磁作用 运动方程

原理: ua ia Mm ωm
电枢回路 定子转子电磁作用 运动方程
若以角速度 为输出量、电枢电压 为输入量,消去中间变量 Ea
、 Mm 、 ia(t) ,可得到直流电动机的微分方程。
)()()()(
tutEtiRdt
tdiL aaaa
aa
电磁转矩方程 meaamm CEtiCM )(
电动机轴上转矩平衡方程
)()()(
tMMtfdt
tdJ Cmmm
mm
m au
电枢回路电压平衡方程

)(1)()()()(
tutEtiRdt
tdiL aaaa
aa
)()(
)()()(
)()(
)(2
2
tMRdt
tdMLtuCtCCfR
dt
tdJRfL
dt
tdJL
CaC
aammemma
mmama
mma
)(,)( 3 2)( meaamm CEtiCM
将方程( 2 )代入方程( 4 )得 ia(t)
)(4)()()(
tMMtfdt
tdJ Cmmm
mm
m au 将方程( 3 )、( 5 )带入方程( 1 )得 与 关系
)5()(1
)()(
tMC
tC
f
dt
td
C
Jti C
mm
m
mm
m
ma

)()(
)(
)()()(
2
2
tMCCfR
R
dt
tdM
CCfR
Ltu
CCfR
C
tdt
td
CCfR
JRfL
dt
td
CCfR
JL
Cemma
aC
emma
aa
emma
m
mm
emma
mamam
emma
ma
,,)(,)(
)(,)(
32
1
a
aL
emma
a
emma
a
emma
m
emma
mam
R
LTCCfR
LKCCfRRK
CCfRCKCCfR
JRT
)()(
)(
)()(
)()(
231
2
2
tMKdt
tdMKtuK
tdt
tdT
CCfR
fRT
dt
tdTT
CC
a
mm
memma
maL
mmL

当电枢回路的电感可以忽略不计,即 La = 0
若电枢回路电阻和电动机的转动惯量都很小,可忽略不计,即 Ra = 0 ,则上式可进一步简化。
)()()()(
21 tMKtuKtdt
tdT Cam
mm
)(
)(,)(
2
1
emma
a
emma
m
emma
mam
CCfRRK
CCfRCKCCfR
JRT
)(1
)( tuC
t ae
m

例2 .5速度控制系统的微分方程
控制系统方块图?

系统输出 系统输入参考量 gu
控制系统的主要部件(元件):给定电位器、运放 1 、运放 2 、功率放大器、直流电动机、减速器、测速发电机
1
21111 ,)(
R
RKuKuuKu efg
1
2211
122 ,,)(
R
RKCRu
dt
duKu
23uKua
CCammm
m MKuKdt
dT
运放 1
运放 2
功放
直流电动机
mi 1
测速发电机 tf Ku
消去中间变量
maf uuuu 21
减速器(齿轮系)

控制系统数学模型(微分方程),令以下的参数为
)()(
321
321
tm
tmmm KKKKKi
KKKKKiTT
)( 321
321
tm
mg KKKKKi
KKKKK
)( 321
321
tm
mg KKKKKi
KKKKK
)( 321 tm
CC KKKKKi
KK
CCggg
gm MKuKdt
duK
dt
dT

• 非线性系统:用非线性微分方程描述。
)(2 tFykydt
dyf
)(tFkydt
dyf
)()( tFytkdt
dyf
2.2.2 微分方程的类型
• 线性定常系统:用线性微分方程描述,微分方程的系数是常数。
• 线性系统的重要性质:满足叠加性和均匀性(齐次性)。即: 如果输入 r1(t)—> 输出 y1(t) ,输入 r2(t)—> 输出 y2(t)
则输入 a r1(t)+b r2(t) —> 输出 a y1(t)+by2(t)
• 线性系统:用线性微分方程描述。
• 线性时变系统:用线性微分方程描述,微分方程的系数是随时间而变化的。
2.2.1 2.2.3 2.2.4

xdx
xdfy
xx
0
)(
22
2
00
)()(
!2
1
)()(
0
0
xdx
xfd
xdx
xdfxfyyy
xx
xx
xdx
)x(df)x(fyyy
0xx00
2.2.3 非线性元件微分方程的线性化
小偏差线性化:用台劳级数展开,略去二阶以上导数项。 一、假设: x,y 在平衡点( x0,y0) 附近变化,即
x=x0+△x, y=y0+△y
二、近似处理
略去高阶无穷小项
• 严格地说,实际控制系统的某些元件含有一定的非线性特性,而非线性微分方程的求解非常困难。如果某些非线性特性在一定的工作范围内,可以用线性系统模型近似,称为非线性模型的线性化。
三、数学方法
2.2.1 2.2.42.2.2

• 求解方法:经典法、拉氏变换法。零状态响应、零输入响应。
rcc uu
dt
duCR 11
)()()0()( 1111 sUsUuCRssUCR rccc )()(1.0)( sUsUssU rcc
1
1.0
)1(
1)(
ssssUc
ttc eetu 1.01)(
2.2.4 线性定常微分方程的求解
R1
C1
i 1(t)
ur
(t)
uc
(t)
例 2.3 已知 R1=1 , C1=1F , uc(0)=0.1v, ur(t)=1(t) ,求 uc(t)
拉氏变换法求解步骤: 1. 考虑初始条件,对微分方程中的每一项分别进行拉氏变换,得到变量 s 的代数方程; 2. 求出输出量拉氏变换函数的表达式; 3. 对输出量拉氏变换函数求反变换,得到输出量的时域表达式,即为所求微分方程的解。
解:
)s(U)s(U)s(sUCR rcc11
1sCR
1
)s(U
)s(U
11r
c
零初始条件下取拉氏变换:
2.2.1 2.2.32.2.2

2.3.1 传递函数的定义
)()()()(
)()()()(
11
1
10
11
1
10
trbdt
tdrb
dt
trdb
dt
trdb
tcadt
tdca
dt
tcda
dt
tcda
mmm
m
m
m
nnn
n
n
n
nnnn
mmmm
asasasa
bsbsbsb
sR
sCSG
11
10
11
10
)(
)()(
)()(
)()(
11
10
11
10
sRbsbsbsb
sCasasasa
mmmm
nnnn
2.3 2.3 传递函数 传递函数 2.3 2.3 传递函数 传递函数
• 线性定常系统在零初始条件下,输出量的拉氏变换与输入量的拉氏变换之比,称为传递函数 。
2.52.1 2.42.2
2.3.2 2.3.3 2.3.4

试列写网络传递函数 Uc(s)/Ur(s).
)()()()(
2
2
tutudt
tduRC
dt
tudLC rc
cc
)()()()(2 sUsUsRCsUsULCs rccc
1
1
)(
)()(
2
RCsLCssU
sUsG
r
c
例 2.4 如图 RLC 电路,R L
C
i(t)
ur
(t)uc
(t)
LsR
1/sC
I(s)
Ur(s)
Uc
(s)
1) 传递函数是复变量 S 的有理真分式函数,分子多项式的次数 m 低于或等于分母多项的次数 n ,所有系数均为实数; 2) 传递函数只取决于系统和元件的结构,与输入信号无关; 3) 传递函数与微分方程有相通性,可经简单置换而转换; 4) 传递函数的拉氏反变换是系统的脉冲响应。 5) 传递函数是在零初始条件下定义的,它只反应系统的零状态特性;零初始条件含义要明确。
参见
解 :1) 零初始条件下取拉氏变换:
传递函数:
2) 变换到复频域来求。2.3.2 、传递函数的性质

求零状态条件下阶跃响应 uc(t) ; 2) uc(0)=0.1v , ur(t)=1(t) ,求 uc(t) ; 3 )求脉冲响应 g(t) 。
1
1
1
1
)(
)()(
11
ssCRsU
sUsG
r
c
)1(
1
1
)()(
sss
sUsU r
c
tc e1)t(u
(前例已得) )()()(11 sUsUssUCR rcc
rcc uu
dt
duCR 11
)()()0()( 1111 sUsUuCRssUCR rccc )()(1.0)( sUsUssU rcc
1
1.0
)1(
1)(
ssssU c
ttc eetu 1.01)(
tes
LsGLtg
]1
1[)]([)( 11
例 2.5 已知 R1=1 , C1=1F , 1 )
对上式进行拉氏反变换:
3 )
解 : 1 )
2 )
R1
C1
i1 (t)
ur
(t)
uc
(t)

• 传递函数分子多项式与分母多项式经因式分解可写为如下形式:
n
jj
m
ii
n
m
ps
zsK
pspspsa
zszszsbsG
1
1*
210
210
)(
)(
)())((
)())(()(
n
1jj
m
1ii
)sT1(s
)s1(K)s(G
• K称为传递系数或增益,在频率法中使用较多。
2.3.2 传递函数的零点和极点
0
jS 平面• 零、极点分布图。
• 传递函数分子多项式与分母多 项式也可分解为如下形式:
• 传递函数分子多项式的根 zi称为传递函数的零点;分母多项式的根 pj称为传递函数的极点。 K*称为传递系数或根轨迹增益。
2.3.3 2.3.42.3.1

•例 2.6 具有相同极点不同零点的两个系统
,它们零初始条件下的单位阶跃响应分别为
极点决定系统响应形式(模态),零点影响各模态在响应中
所占比重。
)2)(1(
24)(1
ss
ssG
)2)(1(
25.1)(2
ss
ssG
tt eesss
sLtc 21
1 321])2)(1(
24[)(
tt eesss
sLtc 21
2 5.05.01])2)(1(
25.1[)(
2.3.3 传递函数的零点和极点对输出的影响 2.3.2 2.3.42.3.1

• 比例环节 : G(s)=K
• 积分环节 : G(s)=1/s
• 微分环节 G(s)=s
1
1)(
TssG
1)( ssG
22
2
22 212
1)(
nn
n
ssTssTsG
2.3.4 典型环节的传递函数
• 惯性环节 :
• 一阶微分环节 :
• 振荡环节 :
2.3.2 2.3.32.3.1

2.4.1 结构图的组成和绘制
2.4 2.4 系统的结构图系统的结构图2.4 2.4 系统的结构图系统的结构图
R(s) C(s)E(s)G(s)
H(s)
(-)
信号线:表示信号传递通路与方向。 方框:表示对信号进行的数学变换。方框中写入元件或系统的传递函数。 比较点:对两个以上的信号进行加减运算。“ +” 表示相加,“ -” 表示相减。 引出点:表示信号引出或测量的位置。同一位置引出的信号数值和性质完全相同。
结构图由许多对信号进行单向运算的方框和一些信号流向线组成,它包括:
2.5
2.1 2.2
2.3
2.4.2 例

)s(IR)s(U)s(U 11cr sC
)s(I)s(U
1
1c
2.4 2.4 系统的结构图系统的结构图2.4 2.4 系统的结构图系统的结构图• 例 2.7 绘出 RC 电路的结构图。
Ur(s) Uc(s)I1(s)
1/R11/sC1
(-)
R1
C1
i1 (t)
ur
(t)
uc
(t)
dtic
Riru 11
11
1 dti
Cuc 1
1
1
rcc uudt
duCR 11,得微分方程化简
1
1
)(
)(
11
sCRsU
sU
r
c传递函数
原理: ur i1 uc

)]()([1
)(1
1 sUsUR
sI i )()()( 21 sIsIsI c
sC
sIsU c
1
)()( )]()([
1)(
22 sUsU
RsI o
sC
sIsU o
2
2 )()(
例 2.8 绘出图示双 RC 网络的结构图。
ui uou C2C1
ici1
R1 R2
i2
2.19
U(s) I2(s)
Uo(s)
(d)
2
1
R (-)
IC(s) U(s)
(c)
sC1
1
IC(s)I1(s)
I2(s)
(-)
(b)
Ui(s) I1(s)
U(s)
(-)
(a)
1
1
R
sC2
1I2(s) Uo(s)
(e)
Ui(s) Uo(s)
I2(s)
U(s)
IC(s)
I1(s) (-)
(-) (-)
(f)
1
1
R sC1
1
sC2
1
2
1
R
返回
解:由因果关系直接绘出网络对应的复频域图。
ui i1 ic u i2 uc

2.4.2 结构图的等效变换和简化
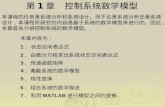
1984年,人类实现了首次太空自由行走,依靠的是一个充着氮气的推进器来控制他的行走。

预期位置
R(s) 实际位置C(s)K1K3
IS2+K1K2K3S+K1K3
R(s)
预期位置
C(s)
实际位置
K2
K3 1/S(-)
1/IS K1
(-)
氮气推进器的控制结构图
等效变换表示信号流向
表示传递函数
等效变换的原则:对输入输出变量等效。

串联等效
K2
K3 1/S(-)
1/IS K1
(-)
氮气推进器的控制结构图
C(s)
实际位置
R(s)
预期位置
C(s)G2(s)G1(s)
V(s)R(s)
C(s)=V(s)G2(s)
结论:串联结构传函相乘
G1(s)R(s)
V(s) C(s)G2(s)
=R(s)G1(s)G2(s)

K2
K3 1/S(-)
1/Is K1(-)
氮气推进器的控制结构图
K1K3/IS
反馈等效
R(s)
预期位置
C(s)
实际位置
R(s) C(s)E(s)G(s)
H(s)
B(s)
E(s)=R(s) B(s) +
C(s)=E(s)G(s)
B(s)=C(s)H(s)
R(s) C(s)G(s)
1±G(s)H(s)
记忆:
请记住!
开环传递函数1±
前向通路传递函数
现在大家可以写出串联等效的结果吗?
C(s)=[R(s) C(s)H(s)]G(s)+
C(s)±C(s)H(s)=R(s)G(s)

(-)
K2
1/S(-)
K1K3/IS
氮气推进器的控制结构图
R(s)
预期位置
C(s)
实际位置
K1K3/ISK1K3/IS
1+K1K2K3/IS
1+
请问,接下来应该如何化简呢?
大家看到这个反馈能否直接写出结果?

再看一个例子R(s)
G4(s)(-)
G2(s) G6(s)(-)
C(s)
G3(s)
G5(s)
G1(s)
并联等效
G2(s)
G3(s)
R(s) C(s)
C1(s)
C2(s)
C(s)= C1(s)+ C2(s)
= [G2(s)+ G3(s)] R(s)
G2(s)R(s) C(s)C1(s)
G3(s)C2(s)
G2(s)+ G3(s)
结论:并联结构传函相加

R(s)
G4(s)(-)
G2(s) G6(s)(-)
C(s)
G3(s)
G5(s)
G1(s)
G4(s)(-)
(G2+G3)G6(-)
R(s)
G5(s)
G1(s) C(s)
G5 - G4
(G2+G3)G6(-)
R(s)G1(s) C(s)
R(s)G1(s)
C(s)(G2+G3)G6
1+(G2+G3)G6(G5-G4)
(G2+G3)G6G1
1+(G2+G3)G6(G5-G4)

•串联等效
R(s) C(s)E(s)G(s)
H(s)
结构图的等效变换小结 1
C(s)G2(s)G1(s)
V(s)R(s)
R(s) C1(s)
C3(s)
C2(s)
(-)
G1(s)
G2(s)
G3(s)
C(s)
C(s) G2(s)G1(s)
R(s)
G1(s)+G2(s)-G3(s) R(s) C(s)
•反馈等效
•并联等效
R(s) C(s)G(s)
1±G(s)H(s)

例 2.10 结构图化简H1
H2
G1 G2 G3
G4
(-)
(-)
R Y
H1
H2
G1 G2 G3
G4
(-)
(-)
R Y
H2
H1
G1 G3
G4
(-)R Y
H2
22
2
1 HG
G
化简方案 1

H1
G1 G3
G4
(-)R Y
H2
22
2
1 HG
G
A
H1
G1 G3
G4
(-)R Y
H2
22
2
1 HG
G
A
A
B
1/G3

H1
G1 G3
G4
(-)R Y
H2
22
2
1 HG
G
A
A
B
1/G3
H1
G1
G4
(-)R Y
H2
22
32
1 HG
GG
A
B
1/G3

H1
G1
G4
(-)R Y
H2
22
32
1 HG
GG
A
B
1/G3
G4
Y R
22113222
321
1 HGGHGGHG
GGG
Y R4
22113222
321
1G
HGGHGGHG
GGG

例 2.10 结构图化简 化简方案 2H1
H2
G1 G2 G3
G4
(-)
(-)
R Y
R
H2+G3
H1
G1 G2 G3
H2
G4
(-) Y
(a)
G4
G3
H2
Y R13222
21
1 HGGHG
GG
(b)
G4
Y R
22113222
321
1 HGGHGGHG
GGG
(c)

• 比较点和引出点的移动: 等效原则:前向通道和反馈通道传递函数都不变。
)()()(
1)( sRsG
sGsR
G(s)R(s) C(s)
C(s)
G(s)
G(s)C(s)
C(s)R(s)
G(s)R(s) C(s)
R(s)
)(
1
sG
G(s)C(s)R(s)
R(s)
• 引出点移动: 1. 引出点前移 C(s)=G(s)R(s)
2. 引出点后移

1. 相加点前移
)]()(
1)()[( sB
sGsRsG
G(s)(-)B(s)
C(s)R(s)
)(
1
sG
G(s)
B(s)
C(s)R(s)
(-)
C(s)R(s)G(s)
(-)
B(s)
C(s)G(s)
G(s)
R(s)
B(s)(-)
R(s)
V1(s)
V2(s)
E1(s) C(s)
(-)
V2(s)
V1(s)(-)
C(s)R(s)
V1(s)
V2(s)
C(s)R(s)
(-)
或
• 相加点的移动
3. 交换或合并相加点
2. 相加点后移
C(s)=G(s)R(s)-B(s)
C(s)=G(s)[R(s)-B(s)]
= G(s)R(s)-G(s)B(s)
C(s)=E1(s)+V2(s)
= R(s)-V1(s)+V2(s)
= R(s)+V2(s)-V1(s)

例 2.10 结构图化简
(1) 结构图化简方案Ⅰ
H1
H2
G1 G2 G3
G4
(-)
(-)
R Y
R
H2+G3
H1
G1 G2 G3
H2
G4
(-) Y
(a)
G4
G3
H2
Y R13222
21
1 HGGHG
GG
(b)
G4
Y R
22113222
321
1 HGGHGGHG
GGG
(c)
返回
2.4.22.4.1

(3) 结构图化简方案Ⅲ
(2) 结构图化简方案Ⅱ
H1+H2/G3
H2/G3
G2G3G1
G4
(-)R Y
(a)
H2/G3
G4
R Y
13222
321
1 HGGHG
GGG
(b)
G1G2G3
H1/G1
G4
R Y(-)
)1
(113
2
GG
H
(a)
3
2
31
2
1
1
G
H
GG
H
G
H
G4
G1G2G3
YR
(-)
(b)
原电路

例 2.11 双 RC 网络的结构图简化。
Ui(s)R1
(-)
(-)
(-)
Uo(s)
(b)
1
1
R sC1
12
1
R sC2
1
sT11
1
Ui(s) (-)
(-)
Uo(s)R1
(c)
2
1
R sC2
1
R1C2s
sT21
1
Ui(s) Uo(s)(-)
(e)
sT11
1
返回
2
1
R
(d)
Ui(s)R1 C2s
(-)
Uo(s)(-)sT11
1
sC2
1
Ui(s)(-) (-)
(-)
I1(s) IC(s
)
U(s)
I2(s)
Uo(s)
(a)
1
1
R 2
1
R sC2
1sC1
1

小结
串联
并联
G1G2 相乘
比较点和引出点移动
反馈 G(s)1±G(s)H(s)
G1+G2 相加

1. 等效为单位反馈系统
)()(
1
)()(1
)()()( sR
sHsHsG
sHsGsC
•其它等价法则 R(s)
(-)
C(s)G(s)
H(s)
)(
1
sH G(s) H(s) (-)
C(s)R(s)
G(s)
H(s)
R(s) C(s)
-1
E(s)
C(s)R(s)G(s)
-H(s)
E(s)
2. 负号可在支路上移动 E(s)=R(s)-H(s)C(s)
=R(s)+(-1)H(s)Cs)
=R(s)+[-H(s)]C(s)

例 2.11 双 RC 网络的结构图简化。
Ui(s)R1
(-)
(-)
(-)
Uo(s)
(b)
1
1
R sC1
12
1
R sC2
1
sT11
1
Ui(s) (-)
(-)
Uo(s)R1
(c)
2
1
R sC2
1
R1C2s
sT21
1
Ui(s) Uo(s)(-)
(e)
sT11
1
返回
2
1
R
(d)
Ui(s)R1 C2s
(-)
Uo(s)(-)sT11
1
sC2
1
Ui(s)(-) (-)
(-)
I1(s) IC(s
)
U(s)
I2(s)
Uo(s)
(a)
1
1
R 2
1
R sC2
1sC1
1

速度控制系统的微分方程
方块图?ωm
运放1
运放2
功放 直流电动机 齿轮系统
测速发电机
ug
-uf
u1 u2 ua ωMc’

系统输出 系统输入参考量 gu
控制系统的主要部件(元件):给定电位器、运放 1 、运放2 、功率放大器、直流电动机、减速器、测速发电机
1
21111 ,)(
R
RKuKuuKu efg
1
2211
122 ,,)(
R
RKCRu
dt
duKu
23uKua
CCammm
m MKuKdt
dT
运放 1
运放 2
功放
直流电动机
传递函数 ?
)(
)()(
sU
ss
g
11
1 )(
)()( K
sU
sUsG
e
)1()(
)()( 2
1
22 SK
sU
sUsG
32
3 )(
)()( K
sU
sUsG a
1)(
)()(01
ST
K
sU
ssG
m
m
a
m
1)(
)()(
'02
ST
K
sM
ssG
m
C
C
m

mi 1
减速器(齿轮系)
测速发电机 tt Ku
消去中间变量 mat uuuu 21
控制系统数学模型(微分方程),令以下的参数为
)()(
321
321
tm
tmmm KKKKKi
KKKKKiTT
)( 321
321
tm
mg KKKKKi
KKKKK
)( 321
321
tm
mg KKKKKi
KKKKK
传递函数 ?is
ssG
m
1
)(
)()(03
tt Ks
sUsH
)(
)()(
)( 321 tm
CC KKKKKi
KK

CCggg
gm MKuKdt
duK
dt
dT
ωm运放1
运放2
功放 直流电动机 齿轮系统
测速发电机
ug
-uf
u1 u2 ua ωMc’
Ωm运放1
运放2
功放 直流电动机 齿轮系统
测速发电机
Ug
-Uf
U1 U2 Ua
Mc’
ΩΩmK1 K2(τS+1) K3 1/i
Kt
Ug
-Uf
U1 U2 Ua
Mc’

信号流图中常用的名词术语: • 源节点(输入节点):o在源节点上,只有信号输出 支路而没有信号输入的支路, 它一般代表系统的输入变量。
信号流图的基本性质基本性质: 1) 节点标志系统的变量,节点标志的变量是所有流向该节点信
号的代数和,用“ O” 表示; 2) 信号在支路上沿箭头单向传递; 3) 支路相当于乘法器,信号流经支路时,被乘以支路增益而变
成另一信号; 4) 对一个给定系统,信号流图不是唯一的。
1+R1C1s
x2 x5x4
x6
-1
x3 x7I(s)
R2 1/R1
x1
2.5 2.5 信号流图及梅逊公式信号流图及梅逊公式 2.5 2.5 信号流图及梅逊公式信号流图及梅逊公式
• 信号流图是由节点和支路组成的一种信号传递网络。
•阱节点(输出节点):在阱节点上,只有信号输入的支路而没有信号输出的支路,它一般代表系统的输出变量。
2.1 2.2 2.3 2.4
2.5.2例2.5.1 2.5.3

• 混合节点:在混合节点上,既有信号输出的支路而又有信号输入的支路。
2.5.1 信号流图的绘制 1. 由系统微分方程绘制信号流图 1 )将微分方程通过拉氏变换,得到 S 的代数方程; 2 )每个变量指定一个节点; 3 )将方程按照变量的因果关系排列; 4 )连接各节点,并标明支路增益。
• 前向通路:信号从输入节点到输出节点传递时,每个节点只通过一次的通路,叫前向通路。前向通路上各支路增益之乘积称前向通路总增益,一般用 Pk 表示。• 回路:起点和终点在同一节点,而且信号通过每一节点不多于一次的闭合通路称回路。回路上各支路增益之乘积称回路增益,一般用 La 表示。• 不接触回路:回路之间没有公共节点时,称它们为不接触回路。
2.5.2例 2.5.3

• 上式拉氏变换
C1
ui
R1
R2 uo
i1
i
)t(u)t(uR)t(i io11
2o R)t(i)t(u dt)ii(
C
1R)t(i 111
)s(U)s(UR)s(I io11 2o R)s(I)s(U
s
)0(u)]s()s([
sC
1R)s( c
11
11
)s(U)s(I)s(I)s(U)s(U)s(U o1oii
•例 2.12
• 信号传递流程:
)0(uC)s()sCR1(
)s()0(uCsCR)s()s(
c1111
1c1111
Ui(s)Ui(s)-Uo(s) Uo(s)Uo(s)
uC(0)
-1
I1(s) I(s)
R21+R1C1s1/R1
-C1

1) 用小圆圈标出传递的信号,得到节点。 2) 用线段表示结构图中的方框,用传递函数代表支路增益。 注意信号流图的节点只表示变量的相加。
G(s) C(s) R(s)
G1(s) G2(s)
H(s)
R(s) E(s)
D(s)
V(s) C(s) (-)
(a) 结构图
(节点 )
C(s)R(s) G(s)
(节点 )(支路 )
C(s)1
R(s)
E(s)
G1(s) G2(s)
-H(s)
Y(s)
D(s)
V(s)
11
(b) 信号流图
2. 由系统结构图绘制信号流图

例 2.13 绘制结构图对应的信号流图 (1) 。
Ui(s) Uo(s)
I2(s)
U(s)
IC(s)
I1(s)(-)
(-) (-) 1
1
R sC1
1
sC2
1
2
1
R
Ui(s) Uo(s)
Uo(s)U(s)
I2(s)IC(s)-1 -1
-1
1/R1 1/C1s 1/C2s1/R2
动画演示
2.5.22.5.1 2.5.3

•例 2.14 绘制结构图对应的信号流图 (2) 。

• 特征式 : —所有单独回路增益之和; —在所有互不接触的单独回路中,每次取其中两 个回路增益乘积和; —在所有互不接触的单独回路中,每次取其中三个回路增益的乘积之和。
• 梅逊公式为:
n
1kKKP
1P
fedcba LLLLLL1
aL
cbLL
fed LLL
—余因子式,即在信号流图中,把与第 K条前向通路相接触的回路去掉以后的 Δ值。
K
2.5.2 梅逊增益公式
其中: n— 从输入节点到输出节点之前向通路总数。 Pk— 从输入节点到输出节点的第 k条前向通路总增益 。
动画示例
例2.5.1 2.5.3

• 前向通路有两条: ,没有与之不接触的回路:
,与所有回路不接触:
解:三个回路: R G1 G2 G3
H2
-H2
-H1
C
G4
221 HGL
2212 HGGL
1323 HGGL
22113222a HGGHGGHG1L1
3211 GGGP
42 GP
11
2
422113222
321n
1kkk G
HGGHGGHG1
GGGP
1)s(G
例 2.15 已知系统信号流图,求传递函数。
• 回路相互均接触,则:
参见

f
求传递函数 X4/X1 及 X2/X1 。
bcgegdLa
degcb LL
1,1
,,.1
21
2141
d
abcfpaefpXX
deg1
)1()(
12211
1
4
bcgegd
abcfdaefpp
X
X
dapXX 1,,.2 1121
deg1
)1(111
1
2
bcgegd
dap
X
X
例 2.16 已知系统信号流图,
deg1 bcgegd则
解:三个回路
有两个互不接触回路

例 2.17 已知系统信号流图,求传递函数 C(S)/R(S) 。
解:三个独立回路 三个前向通路
梅森公式
微分方程
结论

1. 输入信号作用下的闭环传递函数 (N(s)=0)
)s(H)s(G)s(G1
)s(G)s(G
)s(R
)s(C)s(
21
21
)s(H)s(G)s(G1
)s(G
)s(N
)s(C)s(
21
2n
)s(N)s()s(R)s()s(C n)s(N
)s(H)s(G)s(G1
)s(G)s(R
)s(H)s(G)s(G1
)s(G)s(G
21
2
21
21
0)s(N,)s(H)s(G)s(G1
1
)s(R
)s(E)s(
21e
0)s(R,)s(H)s(G)s(G1
)s(H)s(G
)s(N
)s(E)s(
21
2en
)s(N)s()s(R)s()s(E ene
2.5.3 闭环系统的传递函数R(s) E(s)
N(s)C(s)
H(s)
G2(s)G1(s)
B(s)(-)
2. 扰动作用下的闭环传递函数 (R(s)=0)
3. 输入信号和扰动信号同时作用时,系统的输出
4. 闭环系统的误差传递函数 [ 定义误差 E(s)=R(s)-B(s) ]
2.5.2例2.5.1