第三章 模型参考自适应控制系统
78
第第第 第第第第第第第第第第统 第第第 第第第第第第第第第第统 ■ 第 第 一 第第 ■ 第第第 第第第 第第第第第第第第第第 一统 ■ 第第第 第第第 第第第第第第第第第第 统 ■ 第第第 第第第第第第第第第
description
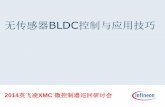
第三章 模型参考自适应控制系统. ■ 第一节 概述. ■ 第二节 模型参考自适应辨识. ■ 第三节 一阶系统的模型参考自适应控制. ■ 第四节 高阶系统的模型参考自适应控制. 第一节 概述. 3.1.1 模型参考自适应控制系统的结构. 3.1.2 MRAC 的设计问题. 3.1.1 模型参考自适应控制系统的结构. 参考模型. +. 干扰. -. +. 控制器. 被控对象. +. -. 内环. 外环. 自适应律. MRAC 结构图. 3.1.2 MRAC 的设计问题. 一、模型完全匹配的条件. - PowerPoint PPT Presentation
Transcript of 第三章 模型参考自适应控制系统

第三章 模型参考自适应控制系统第三章 模型参考自适应控制系统
■ 第一节 概述
■ 第三节 一阶系统的模型参考自适应控制
■ 第四节 高阶系统的模型参考自适应控制
■ 第二节 模型参考自适应辨识

第一节 概述
3.1.2 MRAC 的设计问题
3.1.1 模型参考自适应控制系统的结构

0m
e t y y
参考模型
被控对象组成
常规反馈控制器
自适应控制回路
控制要求:以参考模型的方式给出,表明被控对象的
理想输出应如反对输入信号作出响应。
自适应调整过程:直到 为止。
3.1.1 模型参考自适应控制系统的结构

控制器 被控对象
参考模型
自适应律
+
++
-
-
内环
外环
干扰)(tr u
)(tym
yyte m )(
)(ty p
)( px
MRAC 结构图
)( mx

2
lim 0
min
m m m m
m m
p p
p p
t
m p
m p
m p
x A x B u
y Cx
x A t x B t u
y Cx
e t
J e t dt
e t x t x t
e x x
e y y
设模型状态方程为:
对象的状态方程为:
自适应律 模型匹配的条件
或
状态误差向量:
状态广义误差: 定义
输出广义误差:
一、模型完全匹配的条件3.1.2 MRAC 的设计问题

参考模型
对象
自适应机构
+
-u
)(tym
)(te
)(ty p
pk
二、 MRAC 的几类设计方法1 、基于局部参数最优化理论的设计方法

-
)(
)(
sR
szkm
my
1e
pyck )(
)(
sR
szk p
+
自适应律
r
“MIT” 方案
r

自适应律推导:
min
)(0
2
J
dtteJt
使控制器参数调整规律,
性能指标:
拉普森法速下降法,牛顿优化方法:梯度法,最数优化基本思想:采用局部参
全由自适应作用。假设系统参数的改变完
,其中:
使的未知漂移,如何调整问题:为克服”方案“提出的例如:
pm
t
p
yytedtteJ
kk
MIT
)(min)(
1958
0
2
度方向。下降的方向为它的负梯使
设性能指标为:
J
deJt
0
2 )(

即得自适应律
式,得:式代入将
式得:比较
又参考模型输出:
求导:两边对
对应的微分方程为:
而开环传函:
则
(5) )1()4(
)4( (2)(3)
(3) )(
)(
(2) )()(
)()()(
)(
)(
)(
)()()(
(1)
2
11
1
1
1
1
11
0
110
11
''
mmm
pc
mm
p
c
mm
pc
c
pcm
pcme
cc
t
c
t
ccc
yeByk
kBek
yk
k
k
e
pR
pzk
r
y
rpzkk
epRk
rpzkkkepR
sr
se
sR
szkkks
k
eBek
dk
eeBd
k
eeB
k
JBk

自适应律( 5 )式的实现:
优点: 信号易获取,自适应律易实现 ;
缺点: 不能保证稳定性,需进行稳定性分析和 校验。
my
-r
)(
)(
sR
szkm
my1e
1eym py
'B
ck )(
)(
sR
szk p
+
MIT 自适应控制系统

参考模型
自适应控制
过程 process
+
-r
u
e
py
my
2 、基于 Lyapunov 稳定性理论的设计方法

基本思路:根据系统的等效误差运动方程 ,找出
( 构造 ) 一个适当的 Lyapunov 函数,确定
自适应律,以保证
优点:可保证全局稳定,自适应速度快。
缺点:难以同时保证动态特性, V(x,t) 难构造,常
用试探法寻找。
0
,
dt
xtdvV

第二节 模型参考自适应辨识
3.2.2 一阶系统的模型参考自适应辨识
3.2.3 一般高阶系统的模型参考自适应辨识
3.2.1 概述
3.2.4 线性误差方程及其参数辨识算法

被辨识过程
自适应辨识器
可调模型+
-u epy
my
3.2.1 概 述

结构特点: MRAC 的对偶系统,即将参考模型与可调
过程位置互换。
基本思想:同 MARC 设计思想,即通过自适应控制器
来调整模型使 e(t)0 ,这样的模型就是我
们要辨识的结果。
* MRAC 的结构具有对偶特点,它们既可用于自适应 模型跟随控制,也能用于自适应状态观测与辨识。
。于设计将模型参考辨识方法用的方法用于辨识;设计
“ ”对偶性质MARC
MRAC

1
M
2
p s p
p
p pp t p t
m s m
m
m mm t m t
p p
Y kp s
R s s a
y a y k r t
Y ks
U s s a
y a y k u t
a k
假设需要辨识的对象和参考模型分别由以下传递函数和一阶微分方程来描述:
辨识对象的参数
对象:
模
控制 的:
型
,
:
目 , m t p ty y
并使 与 相一致。
设置参数可调的控制器,与模型一起组成参数可调系统
一、问题的提出3.2.2 一阶系统的模型参考自适应 辨识

-
++
-
可调系统
前馈
反馈
)(tr)(sp
)(typ
p
p
as
k
)(1 te
)(tym
(t)a0
)(tu
(t)b0
m
m
ask
)(sM
m t p tu t y y
前馈可调增益 完全跟踪使反馈可调增益

0 0
0
0
0
0
0 0
3
4
,
0.
m m p
p
m m m pm t m t
m t p
p
t
m
u t
u t a t r t b t y t
y a y k a
a k b t
t r t k b t y t
y y
a t b t
t e t
a
k a t k
其中:
模型的输入控制 为
可调系统状态方程为
为使 与 完全一致,
设计自适应律,调整 , 使上
要求:
式满足,
并当 时,

0)(,0)(,
)5(
)()(
)5()()()()(
)4()1(
)()()(
)()()(
1
00
11
1
1
ttet
tbtaLyapunov
twtkteate
tytyte
tytyte
Tmm
pm
pm
即:当渐近稳定。分方程的自适应调整律,使微
、稳定理论,设计参数任务:基于
得:、代入
两边对时间求导:
令:
二、 自适应律的推导

0)()(2
)(2
1),( 2
11 ttk
teeVLyapunov Tm 函数:构造
稳定。的自适应律,就可保证决定参数稳定定理,只要按根据
则
的自适应律作为如果选择:
)代入(
计算:
)5(
)6(
0)(),(
)6()(
)(
)(
)( .
)()()(
)()()()(5
)()()()(),(
211
10
0
1
121
111
Lyapunov
teaeV
ty
tre
tb
taei
twtet
tktwtektea
ttkteteeV
m
p
Tm
Tmm
m

1
1 1
*
1
4
5 6
m p
Tm m
e y y
e a e k
t t
e
式
、 式
输出误差方程:
参数误差方程:
自适应律:
0 1
0 1
6
p
a t e t r t
b t e t y t
由 式来
小结:汇总公式 .
。和具有一定的激励时间中包含一定的频率成分(要求持续激励要渐近稳定,则要求信号另:若证明
))(
)()(
tr
twt

Fig2.2: 自适应律的实现 (1 , 2 :自适应调整回路的增
益 )
Fig2.3: 自适应律的实现 ( 整定 a0*
, b0* , 使正常时 e(t)=0 ,
自适应回路不起作用 )
Fig2.4: 参数匹配时的等价反馈线路
1
1
, 0
0
p p pm ta k y y t e t
e t
如果 发生变化,则 ,此时 ,
自适应调整
自适
回路投入工作,产生附加控制,直至
为止,此时自适应回路停止工作,由常规
应
控
调整过程:
制工作。
三、自适应系统的结构三、自适应系统的结构

3.2.3 一般高阶系统的模型参考自适应辨识一、 辨识问题的提法
1 、若干定义: 首 1 多项式:复变量 的最高次项的系数 1 的多项式。 Hurwitz 多项式:稳定多项式,其根都在开左半 平面内。稳定的:有理传递函数分母为 Hurwitz 多项式。最小相位或逆稳的:有理传递函数为分子是 Hurwitz 多项式。非最小相位的或逆稳的:有理传递函数为分子不是 Hurwitz 多项式。相对阶次:传递函数分母多项式的阶次与分子多项式阶次之差。
ss

2 、假定被辨识对象:
)(
)(
)(
)()(
sD
sNk
sR
sYsP
p
ppp
参考模型:)(
)(
)(
)()(
sD
sNk
sU
sYsM
m
mmm
参考输入:
的系数。决定
和测的辨识的目的:根据可量界。的分段连续函数,且有是设
)(),(,
)()(
)(
sDsNk
tytr
ttr
ppp
p

-
+
+
-
可调系统
)(tr )(sp)(typ
)(tym
)(tu)(sM
1e
)(
)(
sD
sNk
p
pp
)(
)(
sD
sNk
m
mm
)(
)(*
s
sa
)(
)(*
s
sb
)2(w
二二 、、 辩 识 器 的 结 构辩 识 器 的 结 构11 、结构框图、结构框图

通过前馈和反馈构成可调系统。
)()()(
1)1()(
)(
)(
)(
)(
0
*
*
ssNs
ns
s
sb
s
sa
m
且令:多项式。阶、首滤波器,为—其中:
前馈滤波器:
反馈滤波器:

2 、 的存在:证明 )(),( ** sbsa
)3( )(
)()()()()(
)()()(
)(
)(
)(
)2( )()()(
)(
)()(
)()(
1
)()(
)(
)(
)(
)()(
)1(
)(
)(1
)(
)()(
)(),(),(
**
0
*0
*
*0
*
*
*
20**
sD
sasD
k
ksbksDs
sbksDs
sak
sD
sNk
sbksDs
sak
ssb
sDsNk
sDsNk
s
sa
sR
sYsP
sDk
sNsD
sNksP
Psbsa
pp
p
mmm
mm
m
p
pp
mm
m
m
mm
m
mm
p
pp
pp
pp
即
又
“ ”对象与模型 匹配 。使上页假设存在

3 、
4 、
)(
)()()()(:)(*
0*
sbk
sqsDsDssb
m
pm
令余式为
表示商,除,用被设先求
式满足。,使知再求
则
)3()(:)(
)4( )()()()(
)(
)()()()()(
**
0*
*0
sbsa
k
sDsqsDssb
sbksDsqsDs
m
pm
mpm
为能控标准型。控制向量
的描述:设系统矩阵滤波器
1)1()1(
**
,
)(
)(,
)(
)(
nnn RbR
s
sb
s
sa
是唯一的。,证明上面所求的 )()( ** sbsa

1 2 1 n-1 1
1 1
1 1
1
A
00 1 0 0 0
00 0 1 0 0
0
1
det
*
n n
n
n
n
b
s
s sI s
为系统的系统矩阵, 为滤波器的系统矩阵,勿混淆。
其中: , , 分别为特征多项式 的系数。
21 2 1
-1
2
* * 10 0
* * 1
-1
1
1
G C B D
nn
n
n
s s
ssI b
s
s
a s b s R
a s b s R
sI
则有:
令 ,
,
则:

6.231
)(
)(
)()(
)(
)(
)(
)()(
)(
)(
)1(
36
)2()2(
)1()1(
)2(1**
0
*
)1(1**
0
*
Figw
rn
P
ybww
rbwwb
sy
swbsIbb
s
sb
sR
swbsIaa
s
sa
a
p
p
T
T
状态空间结构图见输出:输入:
阶
器为例。举例:以三阶前馈滤波
、状态方程描述:
反馈滤波器:
前馈滤波器:
、传递函数描述:

模型参考辨识器的结构:5 、
书)(图)变为的结构图(
模型参数辨时器“ ”代入 可调系统 ,则将
“ ”匹配 。“ ”与 对象 模型完全“ ”时, 可调系统 模型当
设标称参数向量:
定义回归向量
3729
**
*
2**0
**0
*
2)2()1(
7.2
)(
)(,
)(
)(
,,,
)(),(),(),()(:)(
PFigP
s
sb
s
sa
Rbbaa
RtwtytwtrtwtwnTT
np
T

可调系统
-
r)(sp
)(typ
)(1 te
)(tym
)(tyi
bSI 1
0a 0bTa Tb
)(sM
bSI 1
模型参数辨识器的结构图

)1( )()( * twMtyT
p 对象
)()()(
)()()(
)()(
)()(
)()(
)()()()()()(
1
1
*
2)2(
0)1(
0
twtMte
tytyte
tt
twtM
Rtwtb
(t)ybtwtatrtaMtyty
T
pi
T
RT
pT
im
误差方程:则
辨识误差:参数误差:定义
辨识器输出:

三、辨识算法
lee
lee
P
twtgett
tecte
twtbtAete
e
tetwttete
T
T
T
,, )2(
, )1(
5
)()()()(
)()(
)()()()(
)()()()()(
1
21
20
1
1
1
可证明:定理利用书
辨识算法
间实现为:系统传递函数的状态空则误差
的输入,为的状态,为误差模型令

. iv持续激励:
0,)(
)()(
0,0,,
)(
012
2
22
021
2
0
0
0
0
tadGwa
IadwwIa
taa
Rtw
t
t
t
t
T
n
或
有在是持续激励的,如果存定义:信号

41 v. P小结:全部结果汇总
Rtety
Rtbtbtatat
Rtwtwtw
Rtyt
Rtytr
i
n
n
i
p
)(),(
)(),(),(),()(
)(),()(
)(),(
)(),(
4
200
2)2()1(
内部信号:
输出:
输入:条假设:

设计参数:
wge
yyewMy
wywrwbbaa
ybwwrbww
g
sNHwritzsb
piT
i
Tp
TTTTT
p
m
1
1
)2()1(00
)2()2()1()1(
)(
,,, ,,,
,0
,)()(,
参数自适应律:
辨识器的结构:为自适应增益。
零点,且包含为能控标准型,

.i线性误差方程表达式:
ii. 参数辨识算法:
3.2.4 线性误差方程及其参数辨识算法
nTpi
Ti
Tp
Rtwttytyte
twtty
twty
21
*
)()()()()(
)()()(
)()(
辨识误差:
辨识器:被辨识对象:
线性表达
)(
)()(
)()(
.
21
121
11
eJ
wteeJ
wgewtMte
Lyapunov
a
T
T
性能指标:时的梯度算法。取优化
来推导本节将从优化性能指标
时的梯度算法:
模型为稳定理论角度推出误差引言:上节已从梯度算法:最速下降法

21 1
1
*1
*
1 1
1
1 1 1 1
2
2 2
0 2
T
T
T
TTe t t
e eJe
e t t
t tJe e
Jg g g g
Jg g e g t t
知
采用 寻优,最
两边
则
,
速下
取 :
设
则
降
导
法
数
1
1 1 1 1
: :
/ 1
/ 1 , 0
T
T
T
g
g e ge g
另一种表达形式
取
则
规范化梯度算法

第三节 一阶系统的模型参考自适应控制第三节 一阶系统的模型参考自适应控制
3.2.1 问题的提出
3.2.2 自适应律的推导
3.2.3 自适应系统的结构

3.3.1 问题的提出
LTI
1
P S p
p
p p p p
m S m
m m
m m m m
Y kp s
U s s a
y t a y t k u t
Y kM s
R s s a
y t a y t k r t
假设我们要控制的对象和选择的参考模型分别由
以下一阶 传递函数和微分方程来描述
被控对象:
:
参考模型:
2

0
0
p m
p m
u t y t y t
c t
d t
u t
y t y t
设计控制律 ,使 渐近跟踪 。
设置参数可调的控制器,与被控对象一起组成一个
闭环可调系统:
前馈可调参数
反馈可
完全
参数
跟踪
调
使
求
控制目标:

-
+
+ +
闭环可调系统
前馈
反馈
)(tr
)(sp
)(typp
p
as
k
0e
)(tym
(t)c0
)(tu
(t)d0
m
m
ask
)(sM

0 0
0 0
0 0
0
3
- - 4
p
p
p p p p p
p p p p
u t c t r t d t y t
y t
y t a y t k c t r t d t y t
a k d t y t k c t r t
c t
控制信号
可调系统的状
“ ”可调系统 的
态方程
输出。
其
:
当
中:
* *0 0 0
0 0
0
, ,
4 5
, , ,
0
p mm
p p
p m p m
a akc d t d
k k
y t
u
a y t k
c t d t
t t
t
e
时
上式 简化为:
设计 调整 使上式满足,
并当 时
自适应控制律
,

3.3.2 自适应律的推导(基于 lyapunov 稳定理论设计)
rk
kcyd
k
aakea
rkrckydkaayya
tyatyatrktya
tytdktrtcktya
tytyte
t
tytyte
p
mp
p
pmpm
mppppmmpm
pmpmmmm
ppppp
mp
mp
000
00
00
0
0
)6(
)()(
)()()()(
)()()()()()4()1(
)()()(
)6( )()()(
、代入
求导:两边对
令

* *0 0
*0 0 0
* *
*0 0
0 0 0
0 0
0 0
7
7 ,
m p p
m p r y p
y
m p r y p
c d
t c
a e k d d y c c r
e t a e k r y
laplace
se s a e s k r
t ct
t d t d
y
为
令 ,
定义参数误差
简便起见,求 式的 变换则

)渐近稳定。分方程(的自适应调整律,使微稳定理论,设计参数任务:基于
7
),(),(
1
)(
)()(
)(
00
*0
*0
0
rtdtcLyapunov
yrMc
yrsMk
k
k
kc
yrsMk
k
as
ksM
yras
k
k
k
yras
kse
pyr
pyrm
p
p
m
pyrm
p
m
m
pyrm
m
m
p
pyrm
p

*
0 0
*
0 0
0
2 2 20 0
0
0
T0 0
L
0 , 0
1, , ,
2 2
, ,
, ,
0pr y r y
r y
r y
c t c
d t d
ya
t e t t
kV e
pu
e tg
e
e
e e
nov
即:当 时, ,即
偏差 空间为 ( 是一个三维空间),它包含
变量 都是一维 ,
为空间 中的向量,则整个系统的
渐近稳定性
构造 函数:
正定
令
应
令
在空间之中。

0 0
2 20 0 0 0
2 2 20 0
0 0
20
0 0 0 0
0 0
8
7
pr r y y
pm p r p y p y m r y p
m p r p y p y m p r
r
r
m
y
y p
p
y
c ge
ke t e t t t t t
g
ka e k e r k e k e y r
r
d ge
yg
a e k e r k
ge
e k e
V
y
r y
y k e r k e
代
选
入
则
如果 择
0
0
0
2
0 0
0
p y m
me
V
a
e
k e y
即对任意 , , 是半负定的

0 0
0 0 2 0
0
0 0
0 0
8
0
L
7
0 ,
6
,
r y
p
p
yap c t d t
e l e l l e l
t e t
c t ge r
d t ge y
t t t
r t
ov
y t
un
根据 ,只要按 决定参数 的
自适应律,就可保证 式稳定。
证明略 , , 有界 ,且可证 ,且 。
据定理 推
稳定定理
自适应
:当 时,
为
若证明 渐近稳定 即当 时
律
论
, 则 号另: 要求信
持续激励。

0
0 0
*00
*
*00
0
7
t -
8
p m
m p r y p
r
y
e y y
e a e k r y
t c t ct
t d t d
t t e g t
输出误差方程:
参数误差方程:
自
0 0
0 0
p
c t ge r
d t ge y
适应律:
小结 汇总公式 :

3.3.3 自适应系统的结构:正常结构
32
52
* *0 0 0 0 0
0
0
---
Fig2.2,p
Fig3.2,p
1 , , 0,
2 , 0
0
p p
c t c d t d e t
k a e t
e t
“ ”为自适应辨识系统的 对偶系统 被控对象 参考模型
说明原理用 参见
实际应用用 参见
正常时,
自适应调整
参数匹配 自适应
回路不工作。
当参数 发生变化时, ,自适应回路工作
为止 再度匹配 。
获取对象的全部状
过程:
态信息 对实际对问题: 象往往不现实。
根据对象的输入输出直接设计自适应控解决: 制系统。
参数调节:
信号调节:

-
+
+
-
可调系统
)(tr
m
m
as
k
)(tym
)(ty p
)(tu 0e
0c
0d)2(w
p
p
as
k
g
g

-
+
+ -
可调系统
)(tr
m
m
as
k
)(ty p
)(tu 0e
*0c
*0d
)2(w
p
p
as
k
g
g
-
+

第四节 高阶系统的模型参考自适应控制
3.4.1 控制问题的提法
3.4.2 控制器的结构
3.4.3 自适应控制的算法

3.4.1 控制问题的提法
)(
)(
)(
)()(
2
)(
)(
)(
)()(
1
sD
sNk
sR
sYsM
LTISISO
sD
sNk
sU
sYsP
LTISISO
m
mm
m
p
pp
p
)参考模型:(
)被控对象:(假设:

问题。第二,自适应律的设计题;第一,控制器的存在问
个根本问题:控制的目标:需解决两
渐近跟踪时,使控制器要求:设计一个自适应
。结构及、
数据组输出及输入阶的结构、已知:
)()(
),(
)](),([)()2(
)];(),([
/),()()1(
tyty
ttu
tytrsM
tytu
mnsP
mp
m
p

-
+
可调系统
前馈
反馈
)(tr
(t)yp
0e
(t)ym
c 0*
u)p(s
)M(s
)(
)(
sD
sNk
p
pp
)(
)(
sD
sNk
m
mm
λ(s)(s)c*
λ(s)d(s)*
2u
1u
1 、结构框图
3.4.2 控制器的结构

*0
0
0 S
,
(
) ( )
1 1Huswitz
m
c
c s d s
s s
u t c c s
d s
s n
s s N
前馈增益 标量
通过 构成可调如此构成的目的,是为得到
反馈控制器
一个对未知参数的线性表达,且 由这些参数组成,并在 及
和 的系统物理上易实现, 传递函数分子的阶不能大于分母的阶
其中: 为 阶首 多项式。
且令 :
“为 完全匹
S
0 S
0 S
m
p
p
s N
c s d sU s c R s U s Y
s s
s d sU s c R s Y
s c s s
”配 ,假设 的零点中包含 的零点
由上图得:

即经适当等效后,上图可等效为下图:
-
+
+
可调系统
前馈
反馈
)(tr
(t)yp
(t)e0
)(tym
c 0* )p(s
)M(s
)(
)(
sD
sNk
p
pp
λ(s)d(s)*
+ *c(s)λ(s)λ(s)
不是唯一的! 段第结构 4P: 55
段第3P55不是一个最小实现

S
S
0S
1
0 S2
S
* * * , 0
*
S *
Nps
K pY s c s Dp p S
cNR s
ps d sK ps c s s D
p S
c K s Np p
s c s D d s K Npp S p
c s d s c
c s c sY
pd s d
R s
“ ”可调系统 传函为:
“ ” “ ”假设存在 及 ,使 可调系统 与模型 匹配 ,
即 S
3
*0 0
K Nm ms M s
Dm S
c c
希望时
* * *2. , 0c s d s c证明 及 的存在性:

式匹配条件满足。使,故存在
:
:再求
:先求
略求解过程
式,则由
4 ,
1
4
21
*0
**
*0
*0
**
0**
*0
*0
**
csdsd
K
Kscsc
sNsqsscsc
sDssNsqK
sdsd
sDsNssc
sdsNKsNscs
p
m
p
mpp
mp
ppp

* * *03. , 4d s d s c证明 , 的唯一性 方程 解的唯一性 。
4. Fig3.3控制器的描述

向量。向量和状态和输出转移
系数的输出分别为
状态,输出。
向量和系数的输出分别为令
则有
令多项式:
s
,,,
s
,,
1
1
detH
0)1(22)1(
)1(11)1(
11
2
1-
122
11
s
dRdRvRd
s
cRvRc
s
s
sbsI
ssssIsurwitz
nn
nn
n
n
nn
n

1-1
1 1
1 1
2-1
0
2 2
s
sa.
s
sb.
T
T
T
p
p
c v sc sI b
s u sc
b us
v c
d v sd sI b d
s y sd
b ys
则:
传递函数描述:
控制器 状态方程描述:
传递函数描述:
控制器 状态方程描述: 2 2
0 Tpv d d y

56
T T T T 20 0 0
1 2T -T 2
* * *T * *T * *T 20 0 0
1 2T T T0 0
*
Fig3.5 p :
, , , ,
, , , ,
, , , ,
T Tp
p
c c c d d R
r r y R
c c c d d R
u t c r c d y d
t t
定义:
参数向量
信号向量
设标称参数向量
则:
再定义:参数误差
2
* 2 1
*
n
n
R
t t R
t M s
-
当 = 时,可调系统传递函与 完全匹配。
解决了控制器存在 的问题。
5.控制器结构的实现:

第五章讨论“ ”间接法 。最优使
或制作用,使利用这些估值来综合控
数和状态的估计,然后实时地给出对象未知参
计一个自适应观测器,利用对象的输入输出设
”。“这种方法称为 直接法函完全匹配
函与给定参考模型的传象组成的可调系统传递
参数,使由控制器和对节某一特定结构的可调
计一个自适应律,调根据对象的输入输出设
两个研究方向
J
mypy
2
1
3.4.3 自适应控制的算法

。相当于串联形式的此时的
制:输入误差直接自适应控制算法输出误差直接自适应控制算法输入误差直接自适应控“ ”直接法
MARCMRAC.1
)2()1(
sU
YsP sP
sR
YsM sm 1
参考模型 控制器 受控对象+
-
自适应
P(s)M-1(s)
u yp
rei
ym
rp

sDsNsk
kc
sdsNksDscs
rrrryy
eMyyMyMyMrre
upMsupyyMr
e
mpm
P
pPp
pppmP
mPmPpi
PPp
i
0*
0
**
01111
11
2
Fig3.2
1
式: “ ”据 匹配 恒等
推导线性误差方程:
是虚构出的。
中,并不存在于为参考输入,但故称=时,= 当
=-=-=- 输入误差:
号: 设虚拟的参考输入信
定义输入误差

*0
*
*
2121
1
2
1
0
Rd.
c.
,,b.
a.
d
d
c
R
y
ybsI
ubsI
y
u
sD
NksM
sD
Nk
U
YsPsNss
sDs
nn
P
P
P
m
mm
p
pPPm
p
=
== 令
乘等式的两边用
除以等式两边用
推导步骤:
*

是真分式,且递稳。中的微分项。则位传函)滤掉
的稳定最小相为相对阶>滤波(解决办法:用
物理上难获取),通过非真传函实现不能物理实现(存在问题:
线辨识算法。的自适应律或参数的在 ”法 求参数” “算法 和 最小二乘算 “按理,可应用 梯度
= 线性误差方程为:
-=且知
再定义信号向量
--
*
11
11
1
T
0
21T
1
R,,ze.
MLM
mnLL
re
yMe
zc
e
yMr
pi
Pi
i
nTP
TP

6160
12
59
2
2
21111
1T2
211
pp5
pFig3.6
4
L
3
R,
z
:
-小结:详见
部分 辨识器:
部分 控制器:
控制器和辨识器结构:
方法同前,推导略
=-= 自适应律为:法,梯度法等推出
是可以获取的,故可用信号向量,近似输出误差
求自适应律:
,=其中:
线性误差方程
定义改进的输入
--
uLpte
u
pgeayapunov
pe
LyMLLrL
puLpe
eyMLrL
T
T
nTP
Tp
T
T
Pp

2. 输出误差自适应控制 ---- 此时的 MRAC 相当于并联形式的 MRAC 。
参考模型
控制器 受控对象
-
自适应机构
M( 反馈 )
u yp
re0
ym
rp
+
-
Ei=rp-r
r
虚构 rp

0
1 T
1
01
00
0 1
1
2
a.
b. ;
1
0
p m
p
p mT
T
e
T T
e y y
ML L u P
ML yp e y y
L
e M Mc
R M j
LS
M e M t t r t t e t
*
*
输出误差:
推导线性误差方程:
“ ”方法同 输入误差
将 作用于 = 两端;
利用
输出误差方程: 若 为严正实
稳定且
则可直接采用梯度算法为自适应律 不是线性 不能用 法
为使 正实 改进的
其中: 1 0e r 表示误差模型输出 >

修改误差模型为:
为严格正实可使只要适当选择如果引入
不是严格正实的。
此时,+
或模型为:
+或相当于对象为:
:对象的相对阶特例
sLsMaassL
sM
asasas
bsbsM
asas
bsM
asasassp
asassp
mn
,,
22
012
23
01
012
0
012
23
01
012
0
tetLeettegct
tecte
tecttrttbtAete
t
t
mtTT
11
62
1
,,,
1p3
时,且时,=- 当
知:引理和定理自适应律:由
则其状态方程为:

参考输入
)(t)(1 sl
pT)(tT )(sM
k
k
m
p)(0 te
)(slp
SPR
如果引入如果引入 L(s)=s+a,L(s)=s+a, 只要适当选择只要适当选择 a,a, 可使可使 M(s)L(s)M(s)L(s) 为正严格为正严格修改误差模型为:修改误差模型为:
0
0
0
1 3*
1*
Fig3.10 p67
Te Mc
LMc
p e
t t ge t p t
u t t p t t t
修改后的误差模型与原模型等效
且 满足严正实
故可用信号 与 组成自适应律以保证系统全局稳定。
自适应律:
自适应系统结构图:

(1)
0 0
(2)
(1)
0
(2)
1 1
( )
,
1
( )
p
p
p s n m
r t
M s ge gey
L s s a LM t
s a
r t
s a
gey
的分母比分子高一阶
要求 严正实,自适应律为 = =
引入 要求 为正严实,同时参考输入 在加
到系统入口前要经过滤波器 滤波。
自适应律为: =
" ”输出误差 法小结:

1 2
1 2
(1)
0
(2)
3 2
, 1
LS
m i
i
p
p s n m
L s N s s a s a s a i n m
L s M s
r t
s a s a s a
ge
y
的分母比分子高二阶以上时 >
取 =
并保证: 严正实函数,则自适应律为:
=
输出法:直观,简单,但只能采用法求自适应律,非线性误差 输入法:线性,既可用梯度法,也可用 法。但算法复杂。
根据 具体应用情况合适的控制方案。
3.“ ” “ ”输入误差 与 输出误差 法比较: