导 读...
32
导 导 导导导导导导导导导导导导导导导 导导导导导导导 导 导导导导导导 导导导导导导导导导 , 一, 统 导导导 导导导导导导导导导导 导 统统 导导导导导 导导导导导导导导导导 导导 导导导导导导导 导导导导导导导导导 导导导 导导 、,。, 导导导 导导导 导导导导导导导 导导导导导 导导导导导 导导导导导 、 、 、 、 、 统 统 统 统 统 导导导导导导导 导。 统 导导 导导导导导导导导导导导导导导导导导导导导导 导导导导导导导导导导导导导导导导导导 :,。 第 10 第 第第第第第第统
-
Upload
isabella-webb -
Category
Documents
-
view
111 -
download
0
description
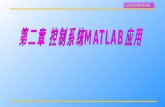
第 10 章 计算机控制系统. 导 读 利用计算机代替常规的模拟控制器,使它成为控制系统的一个组成部分,这种有计算机参加控制的系统简称为计算机控制系统。 在现代军事、工农业生产的控制系统中,计算机控制系统获得了广泛的应用。例如,导弹发射系统、定位系统、雷达方位跟踪系统、温度控制系统、程序控制系统、交直流电动机的速度控制系统等。 优点:可以实现连续控制难以实现的复杂的控制规律,可以有效解决精度和器件漂移的问题等。. 计算机控制系统的组成. 计算机硬件部分工作在离散状态下,被控对象工作于连续状态下。 - PowerPoint PPT Presentation
Transcript of 导 读...

导 读利用计算机代替常规的模拟控制器,使它成为控制系统的一
个组成部分,这种有计算机参加控制的系统简称为计算机控制系统。在现代军事、工农业生产的控制系统中,计算机控制系统获
得了广泛的应用。例如,导弹发射系统、定位系统、雷达方位跟踪系统、温度控制系统、程序控制系统、交直流电动机的速度控制系统等。优点:可以实现连续控制难以实现的复杂的控制规律,可以
有效解决精度和器件漂移的问题等。
第 10章 计算机控制系统

计算机控制系统的组成
计算机硬件部分工作在离散状态下,被控对象工作于连续状态下。
在数字计算机控制下,每经过一定的时间间隔 T ,对模拟信号进行采样,由 A/D 转换成数字量输入计算机,计算机根据控制规律运算后求得控制量,由 D/A 转换成模拟量送到被控对象,使系统达到预定的指标。
计算机控制系统硬件框图

计算机内信号的处理和传递过程
)()()( tytxte fe(t)---- 模拟偏差信号:
e*(t)---- 采样后离散的模拟偏差信号:
其它0
,2,1,0,)()(
kkTttete
)(* te
T0计算机内信号的处理和传递过程
e(kT)---- 是量化以后的偏差信号。
u(kT)---- 是计算机按一定控制算法计算出的数字控制信号。一般情况下, u(kT) 是 e(kT), e(kT-T),…,u(kT-T), u(kT-2T),…的函数。u(t)---- 是模拟控制信号。
采样—量化—运算—保持

第 10 章离散系统控制理论10.1 信号的采样与保持 10.2 差分方程 10.3 Z 变换 10.4 Z传递函数 10.5 稳定性分析

1 、采样过程
10.1.1 信号的采样
连续信号 e(t) 经过采样后变成了一脉冲序列。由于采样开关每次闭合的时间 ε 远小于采样周期T,也远小于系统中连续部分的时间常数,因此在分析采样控制系统时可认为 τ 趋于零。为了说明采样的基本原理,引入理想采样器的概念。理想采样器是一种数学抽象,为数学分析提供方便。
e*(t)e(t)
e(t)e(t)
e(kT)

在理想情况下,采样时间 τ→0。这样,采样过程实际上可视为理想脉冲序列 对 e(t) 幅值的调制过程。其数学表达式为
)(tT
k
T kTtt )()(
e
e
e
e*(t)
数学上,这种调制过程表示为两个信号函数相乘。因此,调制过的采样信号 e*(t) 便可描述为:

2 、采样定理
连续信号 e(t) 与采样信号 e*(t) 的频谱

通过对 e(t)与 e*(t)的频谱分析可知,为了复现原信号 e(t) 的全部信息,要求采样角频率 ωs 必须满足如下关系 :
这就是采样定理,又称香农( Shanon)定理,它指明了复现原信号所必须的最低采样频率。
02wws

保持:是把离散模拟信号 u*(t)转换成模拟信号 u(t)的过程,它是采样的逆过程。保持器:根据过去时刻的值,外推出采样点之间的数值。零阶保持器:把 kT时刻的信号一直保持到 kT+T时刻前的瞬间。
10.1.2 采样信号的保持
零阶保持器u(t) u*(t)
u(t)

零阶保持器的传递函数 )(tfh
)(1)(1)(0
TkTtkTtkTfk
})(1)(1{)()(0
TkTtkTtLkTfsFk
h
TskkTs
k
es
es
kTf )1(
0
11)(
s
eekTf
TskTs
k
1
)(0
s
e Ts
1kTs
k
ekTf
0
)(
s
e Ts
1)(* sF
零阶保持器的传递函数为
)(tfh
2)(
2
2sin)(
1)(
0
0
0
wTjw
wT
wTTjwG
S
esG
sT
零阶保持器像一个延迟为 WT/2的环节

零阶保持器的幅频特性和相频特性如图所示。从幅频特看,幅值随频率的增加而衰减,因此,零阶保持器是一低通滤波器,除了允许主频谱分量通过以外,还允许通过部分的高频频谱分量。从相频特性看,零阶保持器会产生负相移,使系统的相位滞后增大,使系统的稳定性变差。

)()()3( 2 kxkyky
)()()1(2)2(3 kxkykyky
)()(1
2)2(3 2 kxkyk
kyk
)()3(12)2(16)1(7)( kxkykykyky
10.2 差分方程

差分方程的递推解法
)1()()1(2)( kukukyky 0
00
2
)(
kk
kku 1)0( y
12)1()1(2)( 22 kkkkyky
12)1(2)( kkyky
1112)0(2)1( yy
5122)1(2)2( yy
5132)2(2)3( yy
17142)3(2)4( yy
…...

离散序列 {y*(t)}, t=0,1,2, …的 Z 变换
10.3.1 Z变换的定义
∑∞
0
* )-(δ)()(δ)()(
k
T kTtkTyttyty
对上式两边取拉氏变换,得kTs
kk
ekTykTtkTyLsY
)()-(δ)()(00
*
令 z=eTs ,则有
k
k
zkTyzY -∞
0
)()( ∑
10.3 Z变换

kzkTfzTfzTff )()2()()0( 21
0
)()(k
kzkTfzF
211 zz 11
1)](1[
1
z
z
ztZ
akTekTf )(,
,2,1,0k
0 0
)()(k k
kakTk zezkTfzF
0
)(k
kaT ze
aTaTat
ez
z
zeeZ
1)(1
1][
典型信号的 Z 变换
1001)( 21 zzzF
( ) 1, 0f k k
00
01)(
k
kkf

1
0 0 0
( ) ( ) ( )k k k k
k k k
F z f kT z a z a z
az
z
azaZ k
11
1][
( ) , 0kf k a k
,2,1,0sin)( kkTkTf
0 0
sin)()(k k
kk kTzzkTfzF
k
k
kTjkTj
zj
ee
02
0 0
])()([2
1
k k
kjwTkTj zezej
])(1
1
)(1
1[
2
111
zezej TjTj 21
1
cos21
sin
zTz
Tz

[ ( )] ( )mZ f t mT z F z
10.3.2 Z变换的基本定理
1 2 1 2[ ( ) ( )] [ ( )] [ ( )]Z f t f t Z f t Z f t
)()]([ zaFtafZ (1) 线性定理
(2) 滞后定理
( ) 0, 0f t t
(3) 超前定理
])()([)]([1
0
m
k
km zkTfzFzmTtfZ

)(lim)(lim)0(0
zFtffzt
(4) 初值定理及证明
)()1(lim)(lim)(lim)(1
zFzkTftffzkt
(5) 终值定理及证明

10.3.3 Z变换的基本方法
部分分式法部分分式法是当已知连续函数的拉氏变换 Y(s)时,先对 Y(s)进行部分分式展开,将其变成分式和的形式;然后查常用函数的 Z 变换表,即
n
i i
i
as
A
sN
sMsY
1)(
)()(

例 已知某连续信号的拉氏变换为 ,求相应采样序列的 Z 变换 Y(z)
)()(
ass
asY
as
a
s
asY
21)(
1)(
0
1
s
sass
aa
1)()(2
as
asass
aa
asssY
11)(
aTez
z
z
zzY
1
)(
解:

10.3.4 Z逆变换
Z 反变换就是根据给定的 Z 变换式 Y(z) ,求出其原函数(即采样信号) y*(t)。 y(t)与 y*(t) 之间是没有一个惟一确定的关系,也就是说, Z 反变换求出的只是一确定的采样信号 f*(t) ,而不能提供一准确的连续信号 f(t) 。部分分式法
部分分式法就是先把 Y(z)用部分分式展开,然后通过查 Z 变换表找出每个展开项对应的时间函数后相加,便得到 y(kT)。

23
10)(
2
zz
zzF
2
10
1
10
)2)(1(
10
23
10)(
2
zzzzzz
zzF
210
110)(
z
z
z
zzF
)21(10)( kkTf
例 求 的 Z 反变换。
k=0,1,2,3…..
解:

用 Z 变换解差分方程使用类似于在线性连续系统中引入拉普拉氏变换,将微分方程变成为代数方程的求解方法,在线性离散系统中引入 Z 变换,将差分方程也变成代数方程进行求解,可以方便地得到输出在采样时刻的一般表达式。
用 Z 变换求解差分方程的步骤:( 1 )对 n 阶差分方程作 z 变换;( 2 )将已知初始条件代入 z 变换式;( 3 )由 z 变换式求出 Y(z);( 4 )对 Y(z)取 z 反变换,得到差分方程的解 y(kT)。

对 Y(z) 取 Z反变换,得
18
1
38
1
14
1
1
1
8
1
3
1
8
1
1
1
4
1)(
z
z
z
z
z
z
zzzzzY
8
1)3(
8
1)1(
4
1)( kkkTy
例 求解差分方程
设 y(0)=y(T)=0, u(kT)=1(kT).
)()(3)(4)2( kTukTyTkTyTkTy
解:对差分方程两端取 Z 变换,得
1)(3)0(4)(4)()0()( 22
z
zzYzyzzYTzyyzzYz
代入初始条件得
)1)(3)(1()(
zzz
zzY

)(
)()(
zR
zCzG
)(...)1()( 1 nkyakyaky n )(...)1()( 10 mkxbkxbkxb m (0) ( 1) ( 2) ... 0y y y (0) ( 1) ( 2) ... 0x x x
)(...)()( 11 zyzazyzazy n
n 1
0 1( ) ( ) ... ( )mmb x z b z x z b z x z
)()...1( 22
11 zyzazaza n
n 1
0 1( ... ) ( )mmb b z b z x z
nn
mm
zazaza
zbzbb
zR
zYzG
...1
...
)(
)()(
22
11
110
系统 G(z)R(z) C(z)在零初始条件下,线性离散系统输出采样信
号的 Z 变换与输入的采样信号的 Z 变换之比,称为该系统的脉冲传递函数( Z 传递函数)。
若某离散系统由如下的差分方程描述:
10.4 Z传递函数

脉冲传递函数的写法 :
)]([)( sGZzG )()]()([)( 2121 zGGsGsGZzG
1) 串联系统的开环传递函数
)()()( 21 zGzGzG
)()()( 21 zGzGzG
)()]()([)( 2121 zGGsGsGZzG
)()()( 2121 zGzGzGG 注意 :

2) 闭环系统脉冲传递函数
)()(1
)()(
21
1 zUzGG
zGzY
)()()(1
)()()(
321
21 zUzGGzG
zGzGzY

例 下图中 , 试求其脉冲传递函数 G(z) 。 as
sGs
sG
1
)(,1
)( 21
解:对 ( b )中的情况有
))(1(1)()()(
2
21 aTaT ezz
z
ez
z
z
zzGzGzG
对 ( c )中的情况有
))(1(
)1()
1(
1)
11(
1)()( 21 aT
aT
aT ezza
ez
ez
z
z
z
aassZa
zGGzG
)(
1)()( 21 asssGsG

10.5 线性离散系统的稳定性分析
1)S 平面和 z 平面之间的映射关系
S平面 Z平面 系统表现左半平面 单位圆内 稳定虚轴 单位圆上 临界稳定右半平面 单位圆外 不稳定
离散控制系统稳定的充分必要条件是,系统的特征方程的根全部位于 Z 平面上以原点为圆心的单位圆内。

线性离散系统极点的影响 :

例 离散控制系统如图所示,采样周期 Ts=1s,判别系统是否稳定?
解 系统开环脉冲传递函数为
)1
1010()
)1(
10()(
ssZ
ssZzG
876.4 , 076.0 21 zz
))(1(
)1(1010
1
1010
1
101
1
1
ezz
ez
ez
z
z
z
ez
z
z
zT
系统闭环脉冲传递函数为
368.0952.4
32.6
)(1
)()(
2
zz
z
zG
zGzGc
解得特征方程的根为
1z因为 ,所以系统不稳定。

本章小结1.信号的采样与保持将连续信号变为离散信号的过程称为采样。零阶保持器是把某一采样时刻的值恒定地保持到下一采样时刻。采样定理:
2.差分方程与 Z 变换连续系统在离散时刻的数学关系可以用差分方程描述; Z 变换的基本定理。常用 Z 变换方法:部分分式法;常用 Z 反变换方法:部分分式法。
3. 离散系统的数学模型在零初始条件下,线性定常系统的输出的采样信号的 Z 变换与输入的采样信号
的 Z 变换之比,称为该系统的 Z 传递函数。反馈离散系统的 Z 传递函数。
4. 离散系统的稳定性分析系统的特征方程的根全部位于 Z 平面上以原点为圆心的单位圆内。
02wws