教学 课件 - 车辆延误计算
25
教教教教 - 教教教教教教 教教教教教教教教教教教教教教 西 教教教 教教 : 国国国国国国 国国国国国国国
-
Upload
minjonet-roussel -
Category
Documents
-
view
60 -
download
0
description
国家精品课程. 教学 课件 - 车辆延误计算. 主讲人:罗霞. 西南交通大学交通运输与物流学院. 交通管理与控制. 4.2 车辆延误计算. 实施城市交通控制的目标是保障交通流畅通、平稳运行,因此对车辆延误的分析和控制就成为其中的一个核心问题。. 一、车辆延误计算 —— 车辆受阻描述. 在信号交叉口进口道处,车辆在红灯期间受阻,需排队等待绿灯放行。. 车辆受阻程度,一方面与进口道车流到达率及其饱和流率有关,另一方面又与交叉口信号配时参数有关。在车辆到达率与饱和流率一定的情况下,合理的信号配时方案,可使交叉口车辆延误达到最小。. - PowerPoint PPT Presentation
Transcript of 教学 课件 - 车辆延误计算

教学课件 - 车辆延误计算
西南交通大学交通运输与物流学院
主讲人:罗霞
国家精品课程
交通管理与控制

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
在信号交叉口进口道处,车辆在红灯期间受阻,需排队等待绿灯放行。
一、车辆延误计算——车辆受阻描述
实施城市交通控制的目标是保障交通流畅通、平稳运行,因此对车辆延误的分析和控制就成为其中的一个核心问题。
在信号交叉口进口道处,车辆在红灯期间受阻,需排队等待绿灯放行。
车辆受阻程度,一方面与进口道车流到达率及其饱和流率有关,另一方面又与交叉口信号配时参数有关。在车辆到达率与饱和流率一定的情况下,合理的信号配时方案,可使交叉口车辆延误达到最小。
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
进口道车流到达率及其饱和率
车辆受阻程度
交叉口信号配时参数
影响因素
描述 指标
周期车辆延误(辆 秒)∙
平均车辆延误(秒)
平均排队长度(辆)
小时车辆延误(辆 时)∙
车辆延误 交叉口服务水平反映?
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
1. 交叉口的交通状态类型车辆在交叉口的受阻情况因交叉口不同的交通状态而异。一般将交叉口交通状况分为三种:欠饱和、临界饱和(饱和)、过饱和。
比较项目 欠饱和 临界饱和 过饱和周期来车数与
绿灯最大放行车辆数消散时间与绿灯时间通行能力与到达车流率流量比与绿信比
设参数
比较参数
交叉口信号周期 : C 相位绿灯时间 : G 对应相位绿信比 : 进口道到达车流率 : q 饱和流率 : S
进口道流量比 : 进口道的饱和度 : x 道路通行能力 : N 消散时间 :
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
2. 欠 饱 和 状况
( 1 )车辆受阻过程分析
欠饱和状况的特点是:到达车流率 q小于通行能力 N、周期来车数 qC小于绿灯最大放行车辆数以及车队消散时间小于绿灯时间 G。
主要由两条斜线组成:一条斜线始于 O 点,其斜率为N ;另一条斜线始于绿灯时间的起点,其斜率为 q。
4.2 车辆延误计算
G— 相位 i 绿灯时间 R— 相位 i 红灯时间
N辆
t 秒
SτqC
GS
N
q
S
τ
GR
C
Qm
OA
B
欠饱和车辆受阻图
B’

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
在欠饱和状况下,进口道车流到达与放行过程为:车流到达率为 ,红灯排队,绿灯放行。在红灯时间 R 结束时刻,进口道上排队长度 达最大值,称之为最大排队长度 ,即:
( )m q RQ veh
最大排队长度 Qm
在消散时间内,放行的车辆均为受阻的车辆,故受阻车辆数或最大停车辆数,且。
在非饱和绿灯时间内,车流离开率为。这表明,在时段内,进口道上车队已完全消散,来一辆车就走一辆车,没有受阻,即此段时间内车辆延误为零。
进一步说明
绿灯时间开始后,车队以饱和流率 放行,驶离停车线,其驶出率为 。与此同时,进口道车队长度由其最大值逐渐减少;当减少至零时,对应于两条斜线的交点B ,所耗费的时间为饱和绿灯时间,称之为消散时间,其表达式为:
( )sm s
S
Q
q
消散时间𝜏𝑠
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
( 2 )车辆延误
一个周期内受阻车辆数为 m ,周期车辆延误 d 是 m 辆车受阻延误时间的总和,即
1
( )m
ii
d t veh s
—— 第 i 辆车的延误时间, sm—— 周期内受阻车辆数,, veh
在一个信号周期内,对于某一相位进口车道,到来的车辆受到的延误为周期车辆延误,单位为辆•秒 / 周期,可简写为辆•秒。
周期车辆延误 d
周期车辆延误 d 可直接由图所示车辆受阻图中延误三角型的面积来求取
G— 相位 i 绿灯时间 R— 相位 i 红灯时间
N辆
t 秒
SτqC
GS
N
q
S
τ
GR
C
Qm
OA
B
欠饱和车辆受阻图
B'
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
( )( )
2 2 2
d AOB B OB B AB
R S S RSveh s
( 2 )车辆延误
qS
Rq
qS
Qm
消散时间
2
( )2( )
SqRd veh s
S q
改写为
式中: S---- 饱和流率 (veh/s) q---- 车流到达率 (veh/s) R---- 红灯时间 (s)
可 见 周期车辆延误 d与红灯时间 R的平方成正比。
G— 相位 i 绿灯时间 R— 相位 i 红灯时间
N辆
t 秒
SτqC
GS
N
q
S
τ
GR
C
Qm
OA
B
欠饱和车辆受阻图
B'
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
( 2 )车辆延误
平均车辆延误
一个周期内车辆平均延误时间是指在持续时间内,进口道处平均每辆车受到的延误时间,用表示,单位为秒。在持续时间内,信号周期为 C ,车流到达率为 q,则平均车辆延误等于周期车辆延误d 除以周期放行车辆数 qC,即 :
( )d
d vehqC
平均排队长度
平均排队长度是指在持续时间内,进口道处车辆排队的平均长度,用 表示,单位为辆。𝑄 ̅�在持续时间内,信号周期为 C ,车流到达率为 q ,则平均排队长度 等于周期车辆延误𝑄 ̅� d 除以信号周期 C ,即:
Q ( )d
dq vehC
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
在一个信号周期内,进口道车队长度是在变化的。 在红灯时间 R 内,车队长度 Q 由零增长至最大值; 在消散时间内,车队长度 Q 由最大值减少至零。
平均排队长度
C
GR tτ
S-qq
Qm
Q
𝑸𝒅
图中三角形表示车队长度 Q 的变化,其面积为 d 。平均排队长度相当于三角形在信号周期长度 C 内的平均高度,故得:
Q ( )dveh
C
( 2 )车辆延误
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
周期车辆延误 d 单位为辆•秒,当用单位辆•时来表示时,改写为 d/3600 ( 辆 • 时 ) , 又 小 时 周 期 数K=3600/C ,则得小时车辆延误 D 。
3600
3600
d dD veh h
C C ( )
比较小时车辆延误 D 与平均排队长度可见,两者单位不同,其数值相等。
( 2 )车辆延误
小时车辆延误是指在进口道持续一小时情况下得车辆延误,用 D 表示,单位为辆•时 / 时。在持续时间内,车流到达率为 q ,则小时车辆延误 D 等于周期车辆延误 d 乘以小时周期数 K 。
小时车辆延误 D
K( )D d veh s
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
3. 临界饱和(饱和)状况
(1)车辆受阻过程分析 临界饱和车辆受阻图
G— 相位 i 绿灯时间 R— 相位 i 红灯时间
N 辆
t 秒
GS,qC,Sτ
N
qS
τ
GR
C
Qm
1) 在 S 和一定的情况下 ,q 达到其最大值,即;2) 在 q 和一定的情况下, q 为其最小值,即;3) 在 q 和 S 一定的情况下,为其最小值,即 ;
在实际中,饱和状况是极不稳定的,只要 q 接近,即 q 接近 N ,或 S 接近,或接近,进口道交通状况就会由欠饱和变为过饱和,几乎无法维持在饱和状况。
分析车辆受阻图可知,在饱和状况下,车流到达率q 、饱和流率 S 和相位流量比 y 均有其临界值:
到达车流率 q 等于通行能力 N , 周期来车数 qC 等于绿灯最大放行车辆数
SG , 车队消散时间等于绿灯时间 G 。
特点
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
(2) 车辆延误
与欠饱和状况下的分析计算相同,周期车辆延误 d 可由车辆受阻图中延误三角形的面积求取,即:
( )2
RNCd AOB veh s
① 周期车辆延误 d
在持续时间内,车流到达率为 q=N ,则平均车辆延误等于周期车辆延误 d 除以周期放行车辆数 qC ,即:
s2
d Rd
NC ( )
② 平均车辆延误
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
小时车辆延误 D 与平均排队长度数值相同,只是两者单位不同,即:
④ 小时车辆延误 D
( )2
NRD veh
( )2
d NRQ veh
C
在持续时间内,车流到达率 q=N ,则平均排队长度等于周期车辆延误 d 除以信号周期 C ,可视为延误三角形的平均高度即:
③ 平均排队长度
(2) 车辆延误
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
4. 过饱和状况 到达车流率 q 大于通过能力 N , 周期来车数 qC 大于绿灯最大放行车辆数
SG , 车队所需消散时间大于绿灯时间 G 。
特点
1. 到达率 q 增加, ,从而使;2. 饱和流率 S降低,,通行能力随之减小,出现;3. 绿信比减小,,通行能力随之减小,出现;
导致的原因是多方面的,主要是:
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
(1)车辆受阻过程分析
在过饱和持续时间内,车流到达率 q ,且,致使进口道上出现滞留车队。设第一个信号周期内的过饱和车辆受阻过程如图所示。
C)Nq(Q1
在绿灯时间 G 结束时,在进口道处存在滞留车队,其长度为,即:
式中: ---- 信号周期 I 的滞留车队,辆
4.2 车辆延误计算
R
N
(1)
(2)信号周期 I Q1
qC
NC
信号周期车辆受阻图 (I)
N 辆
t 秒
q
S
C
(1)- 正常相位延误 (2)- 过饱和延误
G

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
(1)车辆受阻过程分析
第二个信号周期的过饱和车辆受阻图
信号周期 I滞留车队是信号周期Ⅱ的初始车队长度;信号周期Ⅱ绿灯时间 G 结束时,进口道滞留车队为 。
式中: ---- 信号周期Ⅱ的滞留车队,辆
2 1 1( ) 2 ( )Q Q q N C Q veh
4.2 车辆延误计算
(1)
(2)信号周期Ⅱ Q2
NC
(1)- 正常相位延误 (2)- 过饱和延误
N辆
t 秒
Nq
S
C
Q1
信号周期车辆受阻图 ( )Ⅱ
G— 相位 i绿灯时间 R— 相位 i红灯时间
R G

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
(1)车辆受阻过程分析若上述过饱和过程延续至第三个信号周期,并记延续持续时间为 T ,则过饱和车辆受阻过程如图,滞留车队长度为:
( ) ( )TQ q N T veh NT
qTN(v
eh)
t(s)
GGG RRR
S
S
Q3
Q2
Q1
N
q
S
持续时间 T 车辆受阻图
TC C C
取 T=3C ,则得:
3 3( ) ( )Q q N C veh 在延续时间 T 内,滞留车队 Q 的变化如图:
4.2 车辆延误计算
(q-N)T
Ⅲ
Ⅱ
I
t(s)
Q(
veh
)
Q3
Q2Q1
持续时段 T滞留车队图
T
𝑸

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
(2) 车辆延误
已知正常相位延误是由于红灯期间车辆受阻排队而导致的车辆延误,对应饱和状况下的小时车辆延误:
1 ( )2
NRD veh h
过饱和延误是由于车流到达率 q 大于通行能力 N 而出现的车辆延误,其值与饱和度 x 和持续时间 T 有关,即:
2
)(2
TNqD
在过饱和延续时间 T 内,车辆延误等于正常相位延误和过饱和延误两部分之和,即:
1 2
( 1)
2
NR x NTD D D veh h
( )
将饱和度代入上式,得:2
( 1)( )
2
x NTD veh h
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
(2) 车辆延误
由以上分析可见,正常相位延误是在情况下求得的,与饱和度 x 和持续时间T无关;而过饱和延误则与饱和度 x 、持续时间 T密切相关,饱和度越高,持续时间越长,过饱和延误部分就越大。
此外,上式表明,当时,过饱和延误。但在实际中,存在过饱和延误,即。为此,对过饱和状况下的车辆延误尚需作进一步讨论。
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
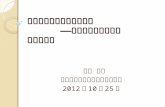
F·韦伯斯特运用排队论,并通过计算机模拟与试验研究,建立了韦伯斯特延误模型。此模型只适用于欠饱和状况下车辆延误的估计,韦伯斯特延误曲线如图所示。
D
q
x
D2
D1
1.00.90.80.7
韦伯斯特延误曲线
正常相位延误
随机延误
车辆延误组成
1. 正常相位延误
已知欠饱和车辆延误,即正常通行状态下周期延误表达式:
)(2
2
1 qS
SqRd
将代入式中,经整理后得周期延误:2
1 ( )2(1 )
qRd veh s
y
则一个周期内车辆平均延误时间
近似地,可推得,代入上式,可写为:
2 2
1
(1 ) (1 )( ) ( )
2(1 ) 2(1 )
C Cd s s
y x
2 2
1
1( )
2(1 ) 2(1 )
qR Rd s
y qC y C
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
D
q
x
D2
D1
1.00.90.80.7
韦伯斯特延误曲线
正常相位延误
随机延误
车辆延误组成
2.随机延误
和 表示了交通流均匀到达引起的车辆平均延误时间,这是基于 q 为常量的基本假定,实际车流到达率存在波动,故需考虑附加的随机延误。由于车辆随机达到引起的延误时间有多种不同的表达方式,韦伯斯特在假定交通流的到达为泊松分布时,先求出理论公式,再用模拟方法加以修正,得出随机延误模型。
车辆平均延误1/32
2 52 2
0.65 ( )2 (1 )
x Cd x s
q x q
式中,第一项表示考虑随机波动的泊松分布到达,第二项表示由模拟方法求出的修正项,因此,代表车辆到达率随机波动产生的附加延误时间,包括个别周期出现过饱和情况而产生的附加延误时间。
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
3.韦伯斯特延误模型
综合和,韦伯斯特延误模型可表达为:1/32 2
2 52
(1 )0.65 ( )
2(1 ) 2 (1 )
C x Cd x s
x q x q
上式中,第一项表示均匀到达;第二项表示考虑随机波动的泊松分布到达;第三项表示由模拟方法求出的修正项。
2 2
1/3 2 5(1 )0.65 ( )
2(1 ) 2(1 )
qC xD qC x s
x x
小时车辆延误模型
4.模型特性分析
在信号配时参数一定的情况下,由韦伯斯特延误模型可求得不同饱和度 (或流量 )下的正常相位延误和随机延误
韦伯斯特延误模型只适用于欠饱和状况下车辆延误的估计。• 当饱和度较低时,计算结果比较符合实际;• 当饱和度偏高,特别是接近 1 时,计算结果与实际相差较大;• 当饱和度等于 1 和大于 1 时,该模型的结果显然是不符合实际的。
鉴于韦伯斯特延误模型的不足之处,为此有必要寻求既适用于欠饱和,又适用于过饱和状况下的延误模型。
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
在韦伯斯特延误模型的基础上,给出综合延误模型。此模型描述两部分车辆延误:正常相位延误和随机延误与过饱和延误。
综合延误模型可表示为,即:
D2
Ds
D1
1.1
D2
D1
1.00.90.80.7
q
x
D综合延误曲线
xNx
qCD o
)1(2
)1( 2
其中,第一项为正常相位延误 ,与韦伯斯特延误模型的相同。第二项考虑了随机与过饱和交通延误,用平均过剩滞留车辆数(或过饱和时溢出车辆数)与饱和度 x 的乘积表达式描述,即:
2 ( )oD N x veh h
0
1
)(5.1 0
0 x
xxN
当
当时式中:
式中: ,S 为饱和流量,为有效绿灯时间
4.2 车辆延误计算

交通管理与控制国家精品课程网站: http://jpkc.swjtu.edu.cn/C89
D2
Ds
D1
1.1
D2
D1
1.00.90.80.7
q
x
D综合延误曲线 由综合延误模型可绘制延误曲线,,与
韦伯斯特延误模型比较,可见:
( 1 ) 此模型既适用于欠饱和,又适用于过饱和状况;
( 2 )当饱和度较低时,计算结果与韦伯斯特延误模型相近;
( 3 ) 该模型能描述在饱和度 x =1 及其附近时的交通状况;
( 4 ) 当 x >>1 时,随机与过饱和延误趋近与过饱和延误。
4.2 车辆延误计算