车轮多边形化对车辆运行安全性能的影响transport.chd.edu.cn/Upload/PaperUpLoad/4371a93b-2470-4f11-9ab… ·...
8
第 11 卷 第 3 期 2011 年 6 月 交通运输工程学报 JournalofTrafficandTransportationEngineering Vol.11 No.3 Jun.2011 收稿日期: 20110120 基金项目: 四川省科技支撑计划项目( 2010GZ0226 ); 四川省基础研究计划项目( 2010JY0070 ) 作者简介: 吴 磊( 1981 ), 男, 贵州毕节人, 西南交通大学工学博士研究生, 从事车辆动力学研究。 导师简介: 金学松( 1956 ), 男, 江苏扬州人, 西南交通大学教授, 工学博士。 文章编号: 16711637 ( 2011 ) 03004708 车轮多边形化对车辆运行安全性能的影响 吴 磊, 钟硕乔, 金学松, 李 玲 ( 西南交通大学 牵引动力国家重点实验室, 四川 成都 610031 ) 摘 要: 用 Timoshenko 梁、 Euler 梁分别模拟钢轨、 直线电机定子与反力板, 用集中质量块、 三维实 体有限元分别模拟有砟轨道、 板式轨道, 建立了直线电机车辆 / 轨道耦合动力学模型, 分析了 2 种轨道 上不同磨耗程度车轮对轮轨法向力和脱轨系数的影响。计算结果表明: 当车辆以速度为 60km · h -1 通过半径为 300 m 的曲线轨道时, 在板式轨道上的轮轨法向力最小、 最大值分别为 55.34 、 112.53kN , 脱轨系数最大值为 0.290 , 在有砟轨道上的轮轨法向力最小、 最大值分别为 60.70 、 123.00kN , 脱轨系数最大值为 0.289 ; 当车辆以速度为 60km · h -1 通过半径为 600m 的曲线轨道 时, 在板式轨道上的轮轨法向力最小、 最大值分别为 52.93 、 107.59kN , 脱轨系数最大值为 0.064 , 在有砟轨道上的轮轨法向力最小、 最大值分别为 59.45 、 112.33kN , 脱轨系数最大值为 0.071 ; 当车 辆以速度为 90km · h -1 通过波长为 100mm 的 3 种深度的凹坑时, 在板式轨道上的轮轨法向力最 小、 最大值分别为 49.54 、 114.36kN , 脱轨系数最大值为 0.024 , 在有砟轨道上的轮轨法向力最小、 最大值分别为 50.19 、 134.29kN , 脱轨系数最大值为 0.031 。各种工况下的脱轨系数均在安全限度 以内, 不会引起脱轨。 关键词: 车辆工程; 车辆 / 轨道耦合动力学; 多边形车轮; 安全性能; 直线电机; 有砟轨道; 板式轨道; 凹坑; 数值模拟 中图分类号: U270.2 文献标志码: A 犐狀犳犾狌犲狀犮犲狅犳 狆 狅犾 狔犵 狅狀犪犾狑犺犲犲犾狅狀狉狌狀狀犻狀 犵 狊犪犳犲狋 狔 狅犳狏犲犺犻犮犾犲 WULei , ZHONGShuoqiao , JINXuesong , LILing ( TractionPowerStateKeyLaboratory , SouthwestJiaotongUniversity , Chengdu610031 , Sichuan , China ) 犃犫狊狋狉犪犮狋 : Timoshenkobeam and Eulerbeam wererespectivelyusedtosimulaterail , linear inductionmotor ( LIM ) statorandreactionplate , concentration massblockand3Dentityfinite elementwererespectively usedto simulate ballasttrack and slabtrack , andvehicle / track couplingdynamics modelswith LIM wereestablished.Theinfluenceofwheelswithdifferent weardegreesonwheel / railnormalcontactforcesandderailmentcoefficientsonthetwoballasts wasanalyzed.Calculationresultshowsthat whenvehiclepassesthecurvedtrack withradius 300mat60km · h -1 , theminimunandmaximum wheel / railnormalcontactforcesonslabtrack are55.34 , 112.53kN , andthemaximum derailmentcoefficientis0.290 .Themaximumand minimunwheel / railnormalcontactforceson ballasttrack are123.00 , 60.70kN , and the maximumderailmentcoefficientis0.289 .Whenvehiclepassesthecurvedtrackwithradius600m at60km · h -1 , theminimunandmaximum wheel / railnormalcontactforcesonslabtrackare 52.93 , 107.59kN , andthe maximum derailmentcoefficientis0.064 .The minimunand
Transcript of 车轮多边形化对车辆运行安全性能的影响transport.chd.edu.cn/Upload/PaperUpLoad/4371a93b-2470-4f11-9ab… ·...

第11卷 第3期
2011年6月
交 通 运 输 工 程 学 报
JournalofTrafficandTransportationEngineering
Vol.11 No.3
Jun.2011
收稿日期:20110120
基金项目:四川省科技支撑计划项目(2010GZ0226);四川省基础研究计划项目(2010JY0070)
作者简介:吴 磊(1981),男,贵州毕节人,西南交通大学工学博士研究生,从事车辆动力学研究。
导师简介:金学松(1956),男,江苏扬州人,西南交通大学教授,工学博士。
文章编号:16711637(2011)03004708
车轮多边形化对车辆运行安全性能的影响
吴 磊,钟硕乔,金学松,李 玲(西南交通大学 牵引动力国家重点实验室,四川 成都 610031)
摘 要:用Timoshenko梁、Euler梁分别模拟钢轨、直线电机定子与反力板,用集中质量块、三维实
体有限元分别模拟有砟轨道、板式轨道,建立了直线电机车辆/轨道耦合动力学模型,分析了2种轨道
上不同磨耗程度车轮对轮轨法向力和脱轨系数的影响。计算结果表明:当车辆以速度为60km·h-1
通过半径为300m 的曲线轨道时,在板式轨道上的轮轨法向力最小、最大值分别为55.34、
112.53kN,脱轨系数最大值为0.290,在有砟轨道上的轮轨法向力最小、最大值分别为60.70、
123.00kN,脱轨系数最大值为0.289;当车辆以速度为60km·h-1通过半径为600m的曲线轨道
时,在板式轨道上的轮轨法向力最小、最大值分别为52.93、107.59kN,脱轨系数最大值为0.064,
在有砟轨道上的轮轨法向力最小、最大值分别为59.45、112.33kN,脱轨系数最大值为0.071;当车
辆以速度为90km·h-1通过波长为100mm的3种深度的凹坑时,在板式轨道上的轮轨法向力最
小、最大值分别为49.54、114.36kN,脱轨系数最大值为0.024,在有砟轨道上的轮轨法向力最小、
最大值分别为50.19、134.29kN,脱轨系数最大值为0.031。各种工况下的脱轨系数均在安全限度
以内,不会引起脱轨。
关键词:车辆工程;车辆/轨道耦合动力学;多边形车轮;安全性能;直线电机;有砟轨道;板式轨道;
凹坑;数值模拟
中图分类号:U270.2 文献标志码:A
犐狀犳犾狌犲狀犮犲狅犳狆狅犾狔犵狅狀犪犾狑犺犲犲犾狅狀狉狌狀狀犻狀犵狊犪犳犲狋狔狅犳狏犲犺犻犮犾犲
WULei,ZHONGShuoqiao,JINXuesong,LILing
(TractionPowerStateKeyLaboratory,SouthwestJiaotongUniversity,Chengdu610031,Sichuan,China)
犃犫狊狋狉犪犮狋:TimoshenkobeamandEulerbeam wererespectivelyusedtosimulaterail,linear
inductionmotor(LIM)statorandreactionplate,concentrationmassblockand3Dentityfinite
elementwererespectivelyusedtosimulateballasttrackandslabtrack,andvehicle/track
couplingdynamicsmodelswithLIM wereestablished.Theinfluenceofwheelswithdifferent
weardegreesonwheel/railnormalcontactforcesandderailmentcoefficientsonthetwoballasts
wasanalyzed.Calculationresultshowsthatwhenvehiclepassesthecurvedtrackwithradius
300mat60km·h-1,theminimunandmaximumwheel/railnormalcontactforcesonslabtrack
are55.34,112.53kN,andthemaximumderailmentcoefficientis0.290.Themaximumand
minimunwheel/railnormalcontactforcesonballasttrackare123.00,60.70kN,andthe
maximumderailmentcoefficientis0.289.Whenvehiclepassesthecurvedtrackwithradius600m
at60km·h-1,theminimunandmaximumwheel/railnormalcontactforcesonslabtrackare
52.93,107.59kN,andthe maximum derailmentcoefficientis0.064.The minimunand

maximumwheel/railnormalcontactforcesonballasttrackare59.45,112.33kN,andthe
maximumderailmentcoefficientis0.071.Whenvehiclepassesthepitswithwavelength100mm
andthreedepthsat60km·h-1,theminimunandmaximumwheel/railnormalcontactforceson
slabtrackare49.54,114.36kN,andthemaximumderailmentcoefficientis0.024.Theminimun
andmaximumwheel/railnormalcontactforcesonballasttrackare50.19,134.29kN,andthe
maximumderailmentcoefficientis0.031.Thederailmentcoefficientsundervariousworking
conditionsarenevermorethansafetylimit,andpolygonalwheelcantcausevehiclederailment.
10tabs,7figs,15refs.
犓犲狔狑狅狉犱狊:vehicleengineering;vehicle/trackcouplingdynamics;polygonalwheel;safety
performance;linearinductionmotor;ballasttrack;slabtrack;pit;numericalsimulation
犃狌狋犺狅狉狉犲狊狌犿犲狊:WULei(1981),male,doctoralstudent,+862887634355,wuleitpl@163.com;
JINXuesong(1956),male,professor,PhD,+862887634355,xsjin@swjtu.edu.cn.
0 引 言
铁路车辆车轮多边形现象又常称为车轮波磨、
车轮谐波磨耗或车轮周期性非圆化,普通列车和高
速列车上都会出现车轮多边形现象[1]。车轮多边形
化车轮会引起车辆/轨道系统的剧烈振动噪声,同时
严重损坏线路和车辆部件,如轨枕、钢轨、扣件、轮对
和轴承等;车轮多边形化不仅会导致更大的轮轨冲
击力和滚动噪声,而且高频时产生的大幅值振动会
降低乘坐舒适性,严重时还会造成安全问题以致脱
轨发生。
国内外许多专家学者针对车轮多变形化问题
做了研究,Nielsen等综述了不同车轮磨耗形成的
根本原因和所产生的影响[23];Morys通过大量的
现场试验和数值仿真,对不同类型的铁路车轮非
圆化问题在垂向轮轨接触力和线路响应上的影响
进行了研究[4];Johansson等从现场试验结果分析
得到货车线路上轴重对车轮多边形发展的影响,
并建立了三维接触模型来研究轮轨磨耗[56];
Brommundt研究了由于偏心和车轮转动惯量导致
的车轮非圆化现象,且给出了不同局部材料特性
对非圆化产生的影响[7];Morys等建立车辆/轨道
模型用于描述ICE车的系统动力学,尽管车辆运
行在弹性线路上,但仍假设了由于车轮半径变化
导致的不平顺[8];张雪珊等建立了1个用来模拟
椭圆化车轮即2阶不圆度车轮的数学模型,仿真
计算了车轮椭圆化的发展过程[9]。车轮非圆化过
程的机理复杂,至今尚未完全搞清楚,需要进一步
建立完整的车辆/轨道耦合动力学及车轮非圆化
形成的模型。
基于车辆/轨道耦合动力学理论,本文建立了直
线电机车辆/轨道耦合动力学计算模型,考虑了横向
和垂向电磁力的影响,计算了车轮非固化影响下的
脱轨系数,分析在有砟轨道和无砟轨道上车轮磨耗
程度对车辆动力学的影响。
1 车辆系统动力学模型
在车辆建模中,本文只考虑直线电机的弹性
变形,其他构件(车体、构架、轮对和吊杆)均被视
为刚体;用多刚体动力理论模拟车辆系统;用
Timoshenko梁模拟钢轨,用Euler梁模拟直线电机
定子和反力板;用集中质量块模拟有砟轨道道床,采
用三维实体有限元模拟板式轨道道床;轮轨激励为
实测地铁车轮多变形化不平顺数据。
1.1 车辆模型
根据多刚体系统动力学理论,本文建立了车体、
构架和轮对计算模型,考虑了直线电机的弹性变形,
车辆系统各部分结构用等效弹簧、阻尼连接。
参考文献[1012],直线电机车辆/轨道耦合动
力学模型考虑了直线电机定子与反力板之间的电磁
力对动力学响应的影响,2种道床形式下的车辆/轨
道耦合动力学模型分别见图1、2。在图1、2中:
!c为车体侧滚角;犣c 为车体垂向位移;犢c 为车体横
向位移;犆s狔为二系悬挂横向阻尼;犓s狔为二系悬挂横
向刚度;!b为构架侧滚角;犣b 为构架垂向位移;犢b
为构架横向位移;犆p狔为一系悬挂横向阻尼;犓p狔为一
系悬挂横向刚度;!w为轮对侧滚角;犣w 为轮对垂向
位移;犢w 为轮对横向位移;犣rL为左钢轨垂向位移;
犣rR为右钢轨垂向位移;犢r 为轮对钢轨横向位移;
犆fa狔为扣件横向阻尼;犓fa狔为扣件横向刚度;!s为轨
枕侧滚角;犣s为轨枕垂向位移;犢s为轨枕横向位移;
犆be狕为道床块垂向阻尼;犓be狕为道床块垂向刚度;犣beL
84 交 通 运 输 工 程 学 报 2011年
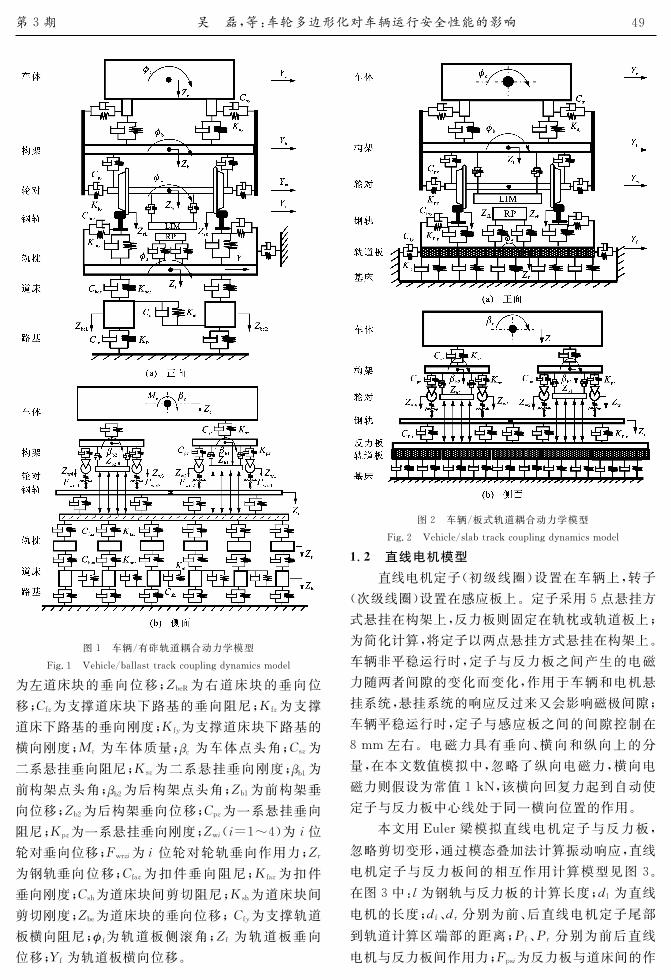
图1 车辆/有砟轨道耦合动力学模型
Fig.1 Vehicle/ballasttrackcouplingdynamicsmodel
为左道床块的垂向位移;犣beR为右道床块的垂向位
移;犆f狕为支撑道床块下路基的垂向阻尼;犓f狕为支撑
道床下路基的垂向刚度;犓f狔为支撑道床块下路基的
横向刚度;犕c 为车体质量;βc 为车体点头角;犆s狕为
二系悬挂垂向阻尼;犓s狕为二系悬挂垂向刚度;βb1为
前构架点头角;βb2为后构架点头角;犣b1为前构架垂
向位移;犣b2为后构架垂向位移;犆p狕为一系悬挂垂向
阻尼;犓p狕为一系悬挂垂向刚度;犣w犻(犻=1~4)为犻位
轮对垂向位移;犉wr狕犻为犻位轮对轮轨垂向作用力;犣r
为钢轨垂向位移;犆fa狕为扣件垂向阻尼;犓fa狕为扣件
垂向刚度;犆sh为道床块间剪切阻尼;犓sh为道床块间
剪切刚度;犣be为道床块的垂向位移;犆f狔为支撑轨道
板横向阻尼;!f为轨道板侧滚角;犣f为轨道板垂向
位移;犢f为轨道板横向位移。
图2 车辆/板式轨道耦合动力学模型
Fig.2 Vehicle/slabtrackcouplingdynamicsmodel
1.2 直线电机模型
直线电机定子(初级线圈)设置在车辆上,转子
(次级线圈)设置在感应板上。定子采用5点悬挂方
式悬挂在构架上,反力板则固定在轨枕或轨道板上;
为简化计算,将定子以两点悬挂方式悬挂在构架上。
车辆非平稳运行时,定子与反力板之间产生的电磁
力随两者间隙的变化而变化,作用于车辆和电机悬
挂系统,悬挂系统的响应反过来又会影响磁极间隙;
车辆平稳运行时,定子与感应板之间的间隙控制在
8mm左右。电磁力具有垂向、横向和纵向上的分
量,在本文数值模拟中,忽略了纵向电磁力,横向电
磁力则假设为常值1kN,该横向回复力起到自动使
定子与反力板中心线处于同一横向位置的作用。
本文用Euler梁模拟直线电机定子与反力板,
忽略剪切变形,通过模态叠加法计算振动响应,直线
电机定子与反力板间的相互作用计算模型见图3。
在图3中:犾为钢轨与反力板的计算长度;犱l为直线
电机的长度;犱f、犱r分别为前、后直线电机定子尾部
到轨道计算区端部的距离;犘f、犘r分别为前后直线
电机与反力板间作用力;犉ps犻为反力板与道床间的作
94第3期 吴 磊,等:车轮多边形化对车辆运行安全性能的影响

用力;犣rp为反力板位移;犼为扣件个数
图3 作用力计算模型
Fig.3 Calculationmodelofinteractionforces
1.3 轨道模型与轮轨作用力
地铁线路上的直线电机车辆上易出现多边形车
轮,同时地铁线路上存在小半径曲线,导致直线电机
车辆脱轨产生事故的可能性会增大。考虑到地铁线
路中既存在有砟轨道又存在板式轨道,因此,本文采
用有砟轨道与板式轨道模型分析多边形车轮对车
辆/轨道耦合系统的动力学的影响。
有砟轨道动力学模型可简化为双质量(轨枕和
道床)、3层(钢轨轨枕道床)弹簧阻尼振动模型。
轨枕与钢轨之间以及轨枕与道床之间在垂向、横向
上用线性弹簧和粘性阻尼连接,并考虑轨枕的垂向、
横向振动及侧滚转动;道床块之间由剪切刚度和剪
切阻尼相连,道床与路基之间用线性弹簧和阻尼连
接,只考虑道床的垂向振动。板式轨道动力学模型
的钢轨模型与有砟轨道的动力学模型大体相同,轨
道板与钢轨之间以及轨道板与路基之间均用线性弹
簧和阻尼连接。
考虑到轮轨接触状态,根据赫兹非线性弹性理
论确定轮轨法向力;根据Kalker线性蠕滑理论计算
轮轨切向力,并利用ShenHedrickElkins理论进行
非线性修正。
2 脱轨系数
脱轨系数为某一时刻作用在车轮上的横向力犙
和垂向力犘 的比值(犙/犘)。按照《铁道车辆动力学
性能评定和试验鉴定规范》(GB5599—85)规定,脱
轨系数的第1限度1.2为评定车辆运行安全性的合
格标准,第2限度1.0为增大了安全裕量的标准。
3 计算结果分析
在计算模型中,选取轨距为1435mm,轨底坡
为1/40,钢轨类型为CN60,相邻轨枕间距为0.6m。
本文分析了车辆以速度为60km·h-1通过半径分别
为300、600m的曲线轨道以及以速度为90km·h-1
通过3种不同深度凹坑直线轨道工况时,车轮多边
形化(不圆度)对车辆脱轨系数和轮轨法向力的
影响。
直线电机地铁车辆导向轮对多边形实测结果见
图4,横坐标为在1个轮周上的测量轮径的位置,纵
坐标为偏离名义滚动圆半径的差值。图4(a)为右
侧车轮测试结果,车轮镟修前测量的车轮非圆化曲
线主要表现为九边形;车轮镟修后运行 6.0×
103km时,车轮还是基本保留镟修后车轮四边形特
征;镟修后运行2.0×104km时,车轮四边形化的初
始加工痕迹仍然清晰可见,但部分区域磨损深度继
续加深,部分区域磨损深度变浅,波数开始分化增
加;镟修后运行7.0×104km时,四边形的镟削结果
几乎完全分化成或演变成九边形,同一个波长的最大
波 深 小 于 0.05 mm;镟 修 后 继 续 运 行 1.2×
105km时,车轮九边形继续加深恶化,同一个波长
内最大磨耗深度增大至0.08mm。图4(b)为左侧
车轮测试结果。左右轮非圆化发展过程基本一致,
但不对称,左轮的非圆化程度略大于右轮。
图4 多边形车轮测量结果
Fig.4 Measuringresultofploygonalwheels
3.1 曲线工况
车辆以速度为60km·h-1通过半径为300m
曲线轨道时(简称为工况1),车辆/有砟轨道与车
辆/板式轨道耦合动力学模型的轮轨法向力与脱轨
系数的比较分别见表1、2,磨耗类型1~5分别表示
05 交 通 运 输 工 程 学 报 2011年

车轮磨耗程度为镟前、镟后运行6.0×103、2.0×
104、7.0×104、1.2×105km。由表1可知,在2种
轨道上的轮轨法向力的最小值随车轮不圆度的增大
而减小,最大值随车轮不圆度的增大而增大,在运行
里程达到1.2×105km前,变化不太显著。由于有
砟轨道道床刚度小,钢轨下支撑刚度小,减振和隔振
性能优于板式道床,在相同的外载荷激励下,有砟轨
道的钢轨动态变形与振动幅度比板式轨道大,轮轨
之间作用力波动也大,因此,有砟轨道上的轮轨法向
力的最小、最大值均比板式轨道上的大。车轮需要
镟修时(镟修前),有砟轨道上的轮轨法向力最小、最
大值分别为60.70、123.00kN,板式轨道上的轮轨
法向力最小、最大值分别为55.34、112.53kN。由
表2可知,在2种轨道上,车轮使用时间接近镟修周
期时,2种轨道上脱轨系数大小基本一致,且镟修前
的脱轨系数远大于车轮正常运行的脱轨系数。车轮
镟修后,车轮的脱轨系数随车轮不圆度的加剧而增
大,在车轮多变形化的过程中,有砟轨道上的脱轨系
数均比板式轨道的大,均在0.3以内,板式轨道上的
脱轨系数增大速度比有砟轨道上的大。
表1 工况1轮轨法向力
犜犪犫.1 犠犺犲犲犾/狉犪犻犾狀狅狉犿犪犾犮狅狀狋犪犮狋犳狅狉犮犲狊狌狀犱犲狉犮狅狀犱犻狋犻狅狀1 kN
磨耗类型最小值 最大值
有砟轨道 板式轨道 有砟轨道 板式轨道
1 60.70 55.34 123.00 112.53
2 83.18 71.45 97.75 89.74
3 83.75 71.78 98.09 92.47
4 81.87 71.46 99.38 92.73
5 78.28 70.42 101.80 92.87
表2 工况1脱轨系数
犜犪犫.2 犇犲狉犪犻犾犿犲狀狋犮狅犲犳犳犻犮犻犲狀狋狊狌狀犱犲狉犮狅狀犱犻狋犻狅狀1
磨耗类型 1 2 3 4 5
有砟轨道 0.289 0.278 0.277 0.278 0.280
板式轨道 0.290 0.268 0.268 0.270 0.273
车辆以速度为60km·h-1通过半径为600m
曲线轨道时(简称工况2)的轮轨法向力与脱轨系数
比较分别见表3、4。在车轮镟修后的各个阶段,有砟
轨道上的轮轨力法向力的最大、最小值比板式轨道
上的大。在2种轨道上,脱轨系数随车轮不圆度的
加剧而增大,但基本都在0.07以内,有砟轨道上的
脱轨系数大于板式轨道上的脱轨系数。
3.2 凹坑工况
近些年来,凹坑已经成为了铁路上的一种重要
的滚动接触磨耗问题,凹坑不仅出现在高速铁路上,
表3 工况2轮轨法向力
犜犪犫.3 犠犺犲犲犾/狉犪犻犾狀狅狉犿犪犾犮狅狀狋犪犮狋犳狅狉犮犲狊狌狀犱犲狉犮狅狀犱犻狋犻狅狀2 kN
磨耗类型最小值 最大值
有砟轨道 板式轨道 有砟轨道 板式轨道
1 59.45 52.93 112.33 107.59
2 82.43 71.44 85.51 89.74
3 82.97 71.77 85.86 92.46
4 81.09 71.46 87.32 92.73
5 77.48 70.41 90.01 89.38
表4 工况2脱轨系数
犜犪犫.4 犇犲狉犪犻犾犿犲狀狋犮狅犲犳犳犻犮犻犲狀狋狊狌狀犱犲狉犮狅狀犱犻狋犻狅狀2
磨耗类型 1 2 3 4 5
有砟轨道 0.071 0.055 0.055 0.056 0.058
板式轨道 0.064 0.028 0.028 0.030 0.036
而且也出现在了传统的轨道线路和地铁线路上[12]。
Ariascuevasa等基于现场试验测量和数值分析发
现凹坑是由积累的磨耗与塑性变形引发的,线路上
的短波不平顺(尤其是轨面的短波不平顺例如波磨)
与质量不好的焊接接头。都会导致凹坑的产生,凹
坑的出现还与车辆轨道耦合系统的相关参数有
关[1315]。不是只有大轴重车辆的运行线路上会出现
凹坑,轮轨冲击力才是造成凹坑的一个关键原因,冲
击力的大小不仅与轴重大小有关,而且存在波磨的
线路上的冲击力也会很大。
图5为钢轨接触表面的损伤,即为凹坑,肉眼可
见。图5(a)为通常单独出现于钢轨接触带中心的
单个凹坑;图5(b)为在压痕或短波波磨的线路上的
连续凹坑,图中所标的21、29为凹坑长度,单位为
mm。凹坑能激发车体额外的振动,从而降低车辆
运行稳定性,增加车辆和轨道的损伤,因此,有必要
研究钢轨凹坑和轮轨多边形化联合作用下的轮轨冲
击作用。
以具有相同波长而不同深度的3种余弦凹坑为
例(图6),分析车辆行以速度为90km·h-1通过凹
坑时的轮轨法向力和脱轨系数。凹坑波长为
100mm,深度分别为0.05、0.10、0.15mm。
有砟轨道上,不同程度磨耗车轮通过余弦凹坑
时的轮轨法向力与运行距离的关系,见图 7。
图7(a)中,当车轮通过凹坑前,轮轨法向力约为静
轮载(84.50kN);通过凹坑时,凹坑不平顺导致轮
轨受到冲击,波深越深,轮轨冲击力越大,轮轨法向
力最大值约为110.00kN;通过凹坑后,轮轨法向力
又基本恢复为静轮载。图7(b)中,1型车轮通过凹
坑时,磨耗车轮在轨道凹坑的不平顺激励下,加剧了
15第3期 吴 磊,等:车轮多边形化对车辆运行安全性能的影响

图5 凹坑
Fig.5 Pits
图6 余弦凹坑
Fig.6 Cosinepit
轮轨冲击,车轮多边形化不平顺激励的响应则占主
导。图7(c)中,2型车轮通过凹坑时,轮轨法向力有
较小的波动,与理想车轮相比,差异较小。3、4、5型
车轮通过凹坑时的轮轨冲击力变化与2型时相似,
但随着运行距离的增大,车轮磨耗加剧,在非凹坑位
置的轮轨法向力变化逐渐增大。在板式轨道上,不
同磨耗与轮通过凹坑时的轮轨法向力变化与有砟轨
道上的运行趋势大致相同。
车辆以速度为90km·h-1通过不同深度凹坑
时,在板式轨道(工况3)和有砟轨道(工况4)上的车
轮轮轨法向力最大、最小值和脱轨系数分别见
表5~10。车轮镟修前,轮轨法向力的最大、最小值
偏离车轮静载最严重,凹坑深度对有砟轨道上最大
轮轨冲击力影响显著;车轮镟修后,随着运行里程的
增大,车轮磨耗程度加剧,此时轮轨法向力的影响因
素主要为凹坑的不平顺程度。
表5 工况3轮轨法向力最大值
犜犪犫.5 犕犪狓犻犿狌犿狑犺犲犲犾/狉犪犻犾狀狅狉犿犪犾犮狅狀狋犪犮狋
犳狅狉犮犲狊狌狀犱犲狉犮狅狀犱犻狋犻狅狀3 kN
磨耗类型 1 2 3 4 5
凹坑
深度/
mm
0.05 114.36 90.79 89.12 91.58 90.72
0.10 114.36 99.14 97.46 99.93 95.06
0.15 114.36 107.49 105.81 108.28 103.41
表6 工况4轮轨法向力最大值
犜犪犫.6 犕犪狓犻犿狌犿狑犺犲犲犾/狉犪犻犾狀狅狉犿犪犾犮狅狀狋犪犮狋
犳狅狉犮犲狊狌狀犱犲狉犮狅狀犱犻狋犻狅狀4 kN
磨耗类型 1 2 3 4 5
凹坑
深度/
mm
0.05 117.08 94.06 93.04 93.38 97.12
0.10 125.69 102.63 101.61 101.96 105.70
0.15 134.29 111.21 110.18 110.53 114.28
表7 工况3轮轨力法向力最小值
犜犪犫.7 犕犻狀犻犿狌犿狑犺犲犲犾/狉犪犻犾狀狅狉犿犪犾犮狅狀狋犪犮狋
犳狅狉犮犲狊狌狀犱犲狉犮狅狀犱犻狋犻狅狀3 kN
磨耗类型 1 2 3 4 5
凹坑
深度/
mm
0.05 49.54 75.69 76.19 75.44 73.02
0.10 49.54 70.69 71.19 70.44 72.96
0.15 49.54 65.71 66.20 65.46 69.49
表8 工况4轮轨法向力最小值
犜犪犫.8 犕犻狀犻犿狌犿狑犺犲犲犾/狉犪犻犾狀狅狉犿犪犾犮狅狀狋犪犮狋
犳狅狉犮犲狊狌狀犱犲狉犮狅狀犱犻狋犻狅狀4 kN
磨耗类型 1 2 3 4 5
凹坑
深度/
mm
0.05 50.19 77.48 75.82 74.59 74.71
0.10 50.19 69.08 67.43 66.20 68.34
0.15 50.19 60.73 59.09 57.87 59.97
表9 工况3脱轨系数
犜犪犫.9 犇犲狉犪犻犾犿犲狀狋犮狅犲犳犳犻犮犻犲狀狋狊狌狀犱犲狉犮狅狀犱犻狋犻狅狀3
磨耗类型 1 2 3 4 5
凹坑
深度/
mm
0.05 0.0241 0.015 0.015 0.016 0.019
0.10 0.024 0.018 0.018 0.018 0.019
0.15 0.024 0.020 0.020 0.021 0.020
表10 工况4脱轨系数
犜犪犫.10 犇犲狉犪犻犾犿犲狀狋犮狅犲犳犳犻犮犻犲狀狋狊狌狀犱犲狉犮狅狀犱犻狋犻狅狀4
磨耗类型 1 2 3 4 5
凹坑
深度/
mm
0.05 0.027 0.019 0.017 0.019 0.021
0.10 0.030 0.023 0.021 0.022 0.024
0.15 0.031 0.025 0.024 0.025 0.027
车轮镟修前,车轮多边形化磨损严重,磨耗程度
最大,脱轨系数最大;车轮镟修后,脱轨系数显著下
降。随着运行里程的增大,车轮多边形化程度加剧,
脱轨系数逐渐变大,有砟轨道上的脱轨系数比板式
25 交 通 运 输 工 程 学 报 2011年

图7 轮轨法向力与运行距离的关系
Fig.7 Relationshipsbetweenwheel/railnormalforcesandrunningdistance
轨道上的稍大。虽然脱轨系数随着车轮磨耗程度的
增大而增大,即使在车轮镟前严重不圆的情况下,脱
轨系数也只达到0.031左右,在安全限度内。
4 结 语
(1)磨损车轮接近镟修周期时,即车轮需要镟修
前,在有砟轨道上的轮轨冲击大于板式轨道上的轮
轨冲击。虽然有砟轨道轨下道床支撑较柔软,减振
能力强,但是轮轨受到来自轮轨接触平面的高频激
励响应较大,轮轨冲击能量不能被消耗,因而轮轨法
向力较大。
(2)车轮镟修前后,2种轨道上的轮轨法向力的
最大、最小值以及脱轨系数差异较大。镟修后,随着
车轮多边形化程度的变化而变化,在运行里程达到
1.2×105km之前变化不大,板式轨道和有砟轨道
上的脱轨系数约为0.030和0.050,运行里程达到
1.2×105km后,2者分别增大至0.060和0.070。
建议车轮运行达到1.4×105km至1.5×105km时
进行镟修较为合适。
(3)在2种轨道上,车轮接近镟修时,因严重的
35第3期 吴 磊,等:车轮多边形化对车辆运行安全性能的影响

多边形磨耗,各种工况下的脱轨系数都比镟修后的
大,有砟轨道上的脱轨系数整体比板式轨道上的大
约0.010。各种工况下的脱轨系数均在安全限度
内,即使是镟前车轮通过深度为0.15mm的凹坑
时,有砟轨道上的脱轨系数也仅为0.031,不会引起
脱轨。
参 考 文 献 :
犚犲犳犲狉犲狀犮犲狊 :
[1] POPPK,KRUCEH,KAISERI.Vehicletrackdynamicsinthe
midfrequencyrange[J].VehicleSystem Dynamics,1999,
31(5/6):423464.
[2] NIELSENJC O,LUNDEN R,JOHANSSON A,etal.
Traintrackinteractionandmechanismsofirregularwearon
wheelandrailsurface[J].VehicleSystemDynamics,2003,
40(1/2/3):354.
[3] NIELSENJCO,JOHANSSON A.Outofroundrailway
wheels—aliteraturesurvey[J].ProceedingsoftheInstitution
ofMechanicalEngineerings,PartF:JournalofRailandRapid
Transit,2000,214(2):7991.
[4] MORYSB.Enlargementofoutofroundwheelprofileson
highspeedtrains[J].JournalofSoundandVibration,1999,
227(5):965978.
[5] JOHANSSON A,NIELSENJCO.Outofroundrailway
wheels—wheelrailcontactforcesandtrackresponsederiverd
fromfieldtestsandnumericalsimulations[J].Proceedingsof
theInstitutionofMechanicalEngineerings,PartF:Journal
ofRailandRapidTransit,2003,217(2):135146.
[6] JOHANSSON A,ANDERSSON C.Outofroundrailway
wheels:astudyofwheelpolygonalizationthroughsimulation
ofthreedimensionalwheelrailinteractionand wear[J].
VehicleSystemDynamics,2005,43(8):539559.
[7] BROMMUNDTE.Asimplemechanismforthepolygonaliza
tionofrailwaywheelsbywear[J].MechanicsRearchCom
munications,1997,24(4):435442.
[8] KOH HI,KWON H B,YOU W H,etal.Astudyon
sourcemechanismintheinteriornoiseproblemofhighspeed
trains[J].NumericalFluid Mechanicsand Multidiciplinary
Design,2008,99:222228.
[9] 张雪珊,肖新标,金学松.高速车轮椭圆化问题及其对车辆横
向稳定性的影响[J].机械工程学报,2008,44(3):5056.
ZHANGXueshan,XIAOXinbiao,JINXuesong.Influenceof
highspeedrailway wheelsovalization on vehiclelateral
stability[J].ChineseJournalof MechanicalEngineering,
2008,44(3):5056.(inChinese)
[10] 李 玲.车轮多边形化对直线电机车辆动力学行为的影响[D].
成都:西南交通大学,2010.
LILing.InfluenceofpolygonalwheelofsubwayLIMtrain
ondynamicbehavior[D].Chengdu:SouthwestJiaotongUni
versity,2010.(inChinese)
[11] 庞绍煌,耿 明.直线电机在轨道车辆运用中的三维分析[J].
电力机车与城轨车辆,2004,27(1):3133.
PANGShaohuang,GENGMing.Threedimensionalanalyse
oflinearmotorapplicationonrailboundvehicles[J].Electric
LocomotivesandMassTransitVehicles,2004,27(1):31
33.(inChinese)
[12] 王景宏.采用直线电机牵引的广州地铁车辆[J].机车电传动,
2006(6):4752.
WANGJinghong.Guangzhou metrovehicles withlinear
motortraction[J].ElectricDriveforLocomotives,2006(6):
4752.(inChinese)
[13] ARIASCUEVASAO,LIZili,LEWISBR,etal.Rolling
slidinglaboratorytestsoffrictionmodifiersindryandwet
wheelrailcontacts[J].Wear,2010,268(3/4):543551
[14] LIZili,ZHAOXin,DOLLEVOETR,etal.Differential
wearandplasticdeformationascausesofsquatattracklocal
stiffnesschangecombinedwithothertrackshortdefects[J].
VehicleSystemDynamics,2008,46(S1):237246.
[15] LIZili,ZHAO Xin,ESVELDC,etal.Aninvestigation
intothecausesofsquats—correlationanalysisandnumerical
modelling[J].Wear,2008,265(9/10):
13491355.
(上接第46页)
[6] 魏 伟,刘 涛,张 军.KZ1型控制阀仿真模型及列车制动
性能仿真研究[J].中国铁道科学,2010,31(1):105110.
WEIWei,LIUTao,ZHANGJun.Thesimulationmodelof
KZ1controlvalveandthesimulationstudyontrainbraking
performance[J].ChinaRailwayScience,2010,31(1):105
110.(inChinese)
[7] 吴萌岭,程光华,王孝延,等.列车制动减速度控制问题的
探讨[J].铁道学报,2009,31(1):9497.
WUMengling,CHENGGuanghua,WANG Xiaoyan,etal.
Discussionofbrakingdecelerationcontrolofrailwayvehicles[J].
JournaloftheChinaRailwaySociety,2009,31(1):9497.
(inChinese)
[8] BUFanping,TANHS.Pneumaticbrakecontrolforpreci
sionstoppingofheavydutyvehicles[J].IEEETransactions
onControlSystemsTechnology,2007,15(1):5364.
[9] 郑循皓,张继业,张卫华.高速列车转向架空气阻力的数值
模拟[J].交通运输工程学报,2011,11(2):4550.
ZHENG Xunhao, ZHANG Jiye, ZHANG Weihua.
Numericalsimulationofaerodynamicdragforhighspeedtrain
bogie[J].JournalofTrafficandTransportationEngineering,
2011,11(2):4550.(inChinese)
[10] 陈哲明,曾 京,关庆华.高速列车再生制动防滑控制及仿真
研究[J].中国铁道科学,2010,31(1):9398.
CHENZheming,ZENGJing,GUANQinghua.Simulation
researchontheantiskidcontrolundertheregenerativebrak
ingofhighspeedtrain[J].ChinaRailwayScience,2010,
31(1):9398.(inChinese)
45 交 通 运 输 工 程 学 报 2011年