






Languages
Pages
Legal


电路与电子技术基础
电路与电子技术基础
第十四章 触发器
第十四章 触发器 第一节 基本触发器 14.1.1 基本触发器的逻辑结构和工作原理 14.1.2 基本触发器功能的描述 第二节 同步触发器 14.2.1 同步 RS 触发器 14.2.2 同步 D 触发器 14.2.3 同步触发器的触发方式和空翻问题 第三节 主从触发器 14.3.1 主从触发器 (Master-Slave Flip-Flop) 基本原理 14.3.2 主从 JK 触发器及其一次翻转现象 第四节 边沿触发器 14.4.1 维持阻塞 D 触发器 14.4.2 边沿 JK 触发器 第五节 触发器的类型及转换 14.5.1 T 触发器和 T’ 触发器 14.5.2 触发器类型转换方法 第六节 集成触发器的脉冲工作特性和动态参数 14.6.1 维持阻塞 D 触发器的脉冲工作特性和动态参数
电路与电子技术基础
电路与电子技术基础
第十四章 触发器
研究对象:数字电路中的重要部件—触发器。触发器是数字电路中的一种记忆部件。关注焦点:各种触发器的特点、状态方程、激励表、状态转移图以及时序图等
特点特点两个互补的输出端 Q和
有两个稳定状态。Q
可以从一个稳定状态转移到另一个稳定状态。
种类J-K 触发器R-S 触发器
D 触发器 T 触发器
触发电平触发
边沿触发
电路与电子技术基础
电路与电子技术基础
第十四章 触发器
本章将介绍:基本 RS 触发器— R 为复位端、 S 为置位端同步 RS 触发器—避免触发器的输出随输入随时改变D 触发器—为了避免 RS 触发器出现的 R=1 , S=1 的不定状态,在 D 触发器中不可能出现 R=1 , S=1 的状况主从触发器—为了避免触发器随输入的改变出现的空翻现象。在 CP=1 期间接收触发, CP 由 1 变 0 时( CP 下降沿)将状态由主触发器送到从触发器。在 CP=0 期间,输入的改变不会引起触发器空翻。这就是主从 RS 触发器的工作原理。
电路与电子技术基础
电路与电子技术基础
第十四章 触发器
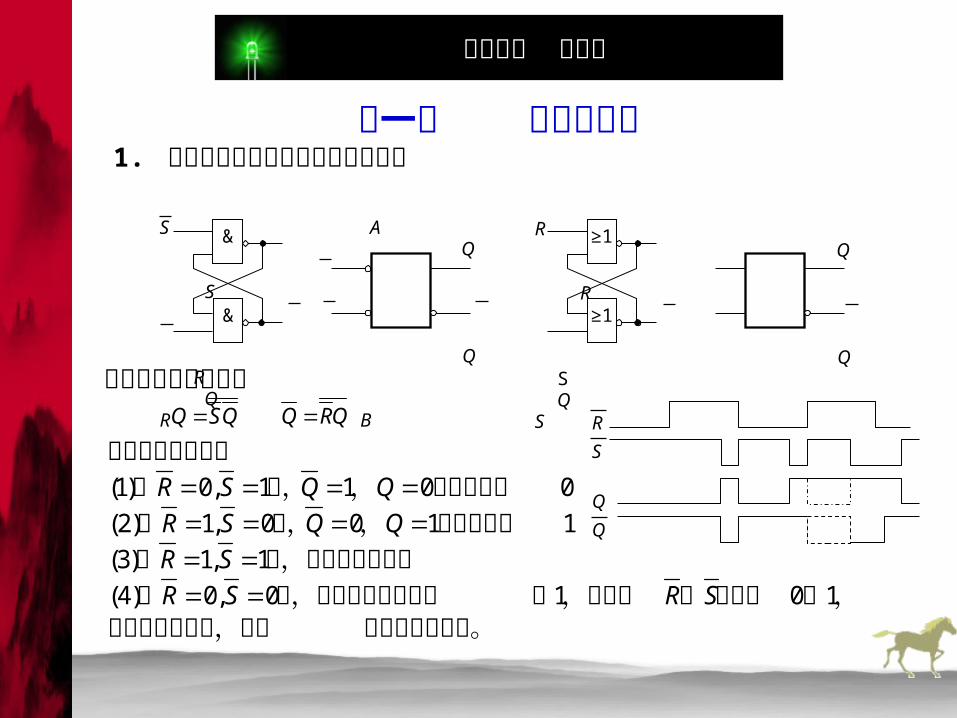
第一节 基本触发器1. 基本触发器的逻辑结构和工作原理
S A Q S Q
Q R QR B
&
&
R Q R Q
Q S QS
≥1
≥1
由图可得逻辑表达式QRQQSQ
稳定状态不确定。会出现竞争现象,造成,变同时由和,但如果为时,触发器两个输出都当
时,触发器状态不变当将触发器置,时,当将触发器置,时,当
又逻辑表达式可知
1010,0)4(
1,1)3(
1100,1)2(
0011,0)1(
SRSR
SR
QQSR
QQSR
R
S
Q
Q
电路与电子技术基础
电路与电子技术基础
第十四章 触发器
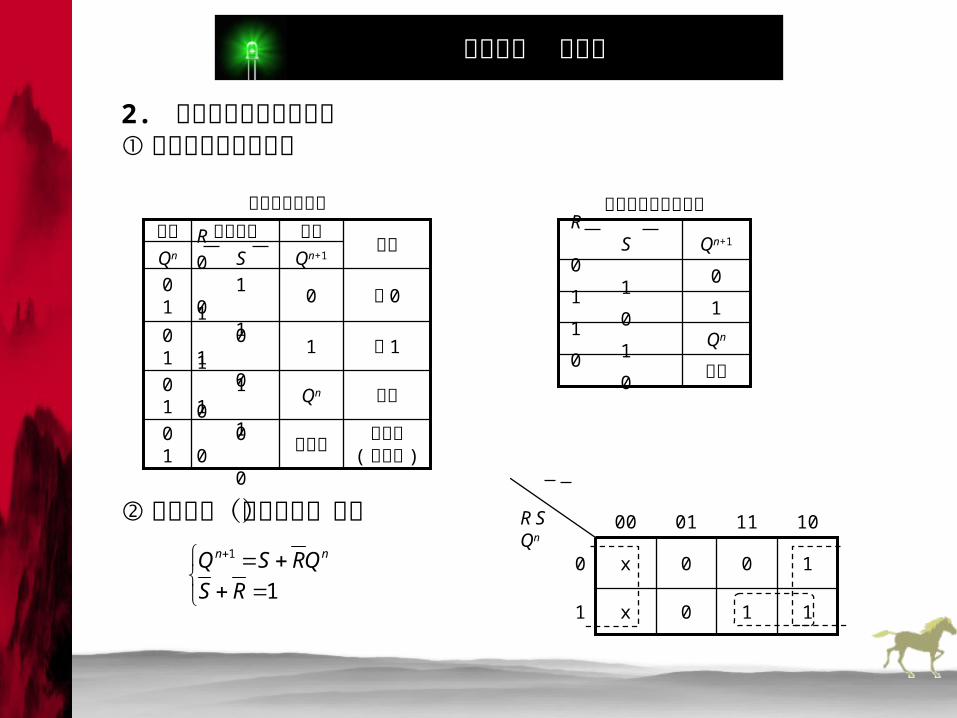
2. 基本触发器的功能描述① 状态转移真值表描述
② 特征方程(状态方程)描述
不正常( 不允许 )
不确定0 00 0
01
保持Qn1 11 1
01
置 111 01 0
01
置 000 10 1
01
Qn+1R SQn功能
次态输入信号现态状态转移真值表
不定0 0
Qn1 1
11 0
00 1
Qn+1R S
简化状态转移真值表
1
1
RS
QRSQ nn
110x1
100x0
10110100
R SQn
电路与电子技术基础
电路与电子技术基础
第十四章 触发器
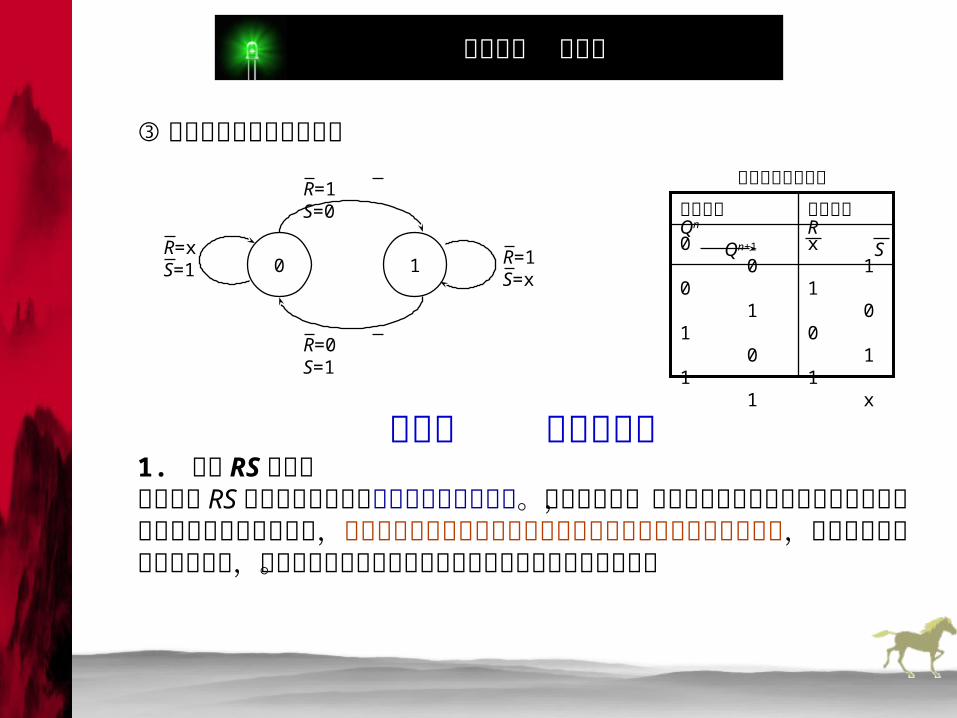
③ 状态转移图和激励表描述
0 1R=xS=1
R=1S=x
R=1 S=0
R=0 S=1
x 11 00 11 x
0 00 11 01 1
R SQn Qn+1
激励输入状态转移基本触发器激励表
第二节 同步触发器1. 同步 RS触发器由于基本 RS 触发器的输出状态直接受输入信号控制。实际应用中,常常需要触发器的输入仅作为触发器发生状态变化的转移条件,不希望触发器输出状态随输入信号的变化而立即发生相应变化,而是要求在时钟信号作用下,触发器的状态才根据当时的输入激励条件发生状态转移。
电路与电子技术基础
电路与电子技术基础
第十四章 触发器
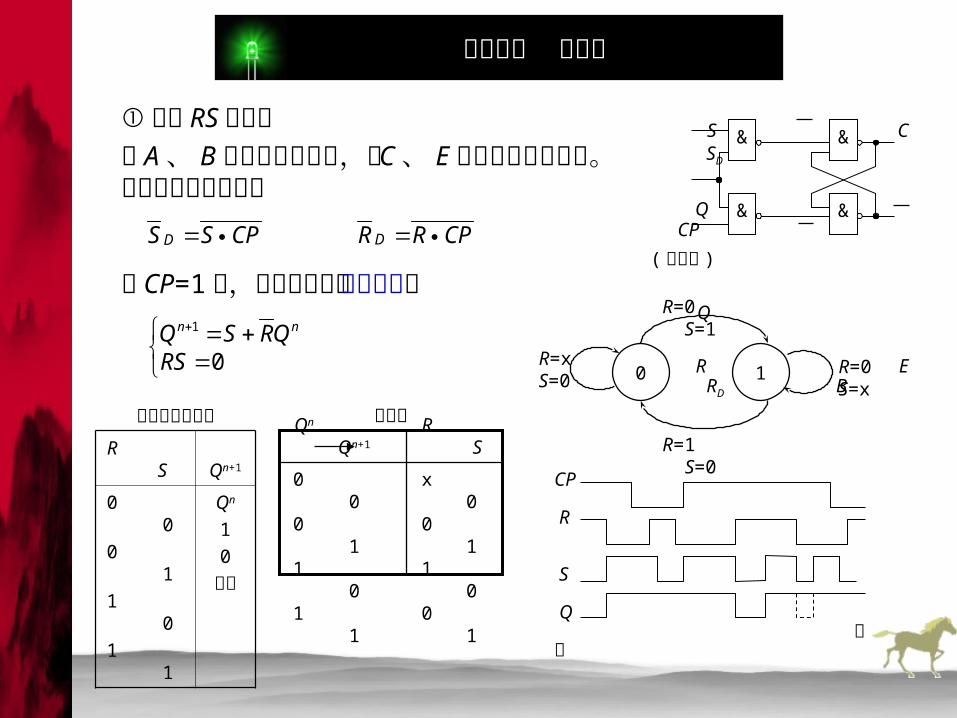
① 同步 RS 触发器 S C SD A Q CP
( 钟控端 ) Q R E RD B
&
&
&
&
CPRRCPSS DD
当 CP=1 时,基本触发器的状态方程为
0
1
RSQRSQ nn
门 A 、 B 组成基本触发器,门 C 、 E 是触发器引导电路。基本触发器的输入为
状态转移真值表R S Qn+1
0 0
0 1
1 0
1 1
Qn
1
0
不定
x 00 11 00 1
0 00 11 01 1
R SQn Qn+1
激励表
0 1R=xS=0
R=0S=x
R=0 S=1
R=1 S=0
CP
R
S
Q 不定

电路与电子技术基础
电路与电子技术基础
第十四章 触发器
② 同步 D 触发器为了避免同步 RS 触发器的输入信号同时为 1 ,在 R 和 S 之间接一个“非门”,信号只从 S 端输入,并将 S 端称为 D 端,称为 D 触发器,也称为 D 锁存器。
1SC11R
S QCP R Q
CPD Q
Q
1SC11R
1
状态转移真值表D Qn+1
0
1
0
1
01 01
0 00 11 01 1
DQn Qn+1
激励表
0 1D=0 D=1
D=1
D=0
③ 同步触发方式和空翻问题在 CP=1 期间,触发器的输出会随输入的改变而改变,这称为触发器的空翻。导致空翻的原因是电平触发,克服空翻采用其它触发方式—主从方式。
CP
D
Q
DQn 1

电路与电子技术基础
电路与电子技术基础
第十四章 触发器
第三节 主从触发器1. 主从触发器基本原理—主从 RS触发器主从触发器克服基本触发器输出随输入改变而改变的情况。
主触发器 从触发器
R G RD E Q 主 C A Q CP ( 钟控端 ) Q
S H SD F Q 主 D B
&
&
&
&
&
&
&
&
1
1SC11R
S QCP R Q
0
1
RS
QRSQRSQ nnn主主
0
11
RS
QRSQQ nnn主
CP=1 期间有效
CP 下降沿到来有效
CP
RS
Q 主
Q
电路与电子技术基础
电路与电子技术基础
第十四章 触发器
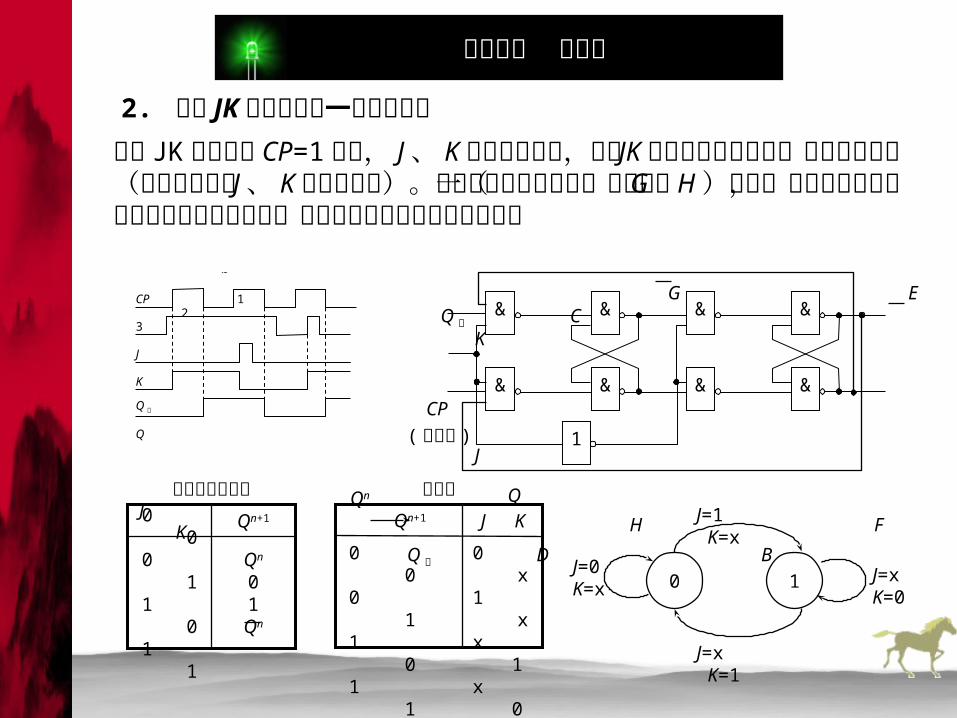
2. 主从 JK触发器及其一次翻转现象主从 RS 触发器在 CP=1 时,当输入出现 R=S=1 时,主触发器会出现输出状态不稳定的情况。为了使触发器的逻辑功能更加完善,利用CP=1 期间,从触发器的两个输出状态不变且互补,将其反馈到输入端,并将 S 改为 J , R 改为 K ,这就是主从 JK 触发器。
G E Q 主 C A K Q
CP
( 钟控端 ) J Q
H F Q 主 D B
&
&
&
&
&
&
&
&
1触发器无约束条件JK
KQQJRS
QKQJ
QKQQJQ
KQRQJS
nn
nn
nnnn
nn
0
1
Qn
01
Qn
0 00 1 1 0 1 1
Qn+1J K
状态转移真值表
0 x1 xx 1x 0
0 00 11 01 1
J KQn Qn+1
激励表
0 1J=0K=x
J=xK=0
J=1 K=x
J=x K=1
CP 1 2 3
J
K
Q 主
Q
主从 JK 触发器在 CP=1 期间, J 、 K 信号发生变化,主从 JK 触发器有可能产生一次性翻转现象(不论输入信号 J 、 K 变化多少次)。因为反馈信号总是将一个门( G 或 H )封锁,被封锁的门的输入信号变化是不受影响,受影响的仅只有没被封锁的门。

电路与电子技术基础
电路与电子技术基础
第十四章 触发器
第四节 边沿触发器为了避免一次的空翻,采用了边沿触发器。如维持阻塞 D 触发器等。1. 维持阻塞 D 触发器
RD
Q2 Q
D Q4
F C ACP G E B
Q1 Q3 Q
SD
&
&
&
&
&
&
时当触发器置触发器置
11
101
010
DD
DD
DD
SR
SR
SR
当 CP=0 时,门 C 、 E 被封锁, Q3=Q
4=1 ,触发器状态保持不变。在此期间,由于 Q4 至 F 、 Q3 至 G 的反馈信号将门 F 、 G 打开,可以输入数据 D 。
DQQDQ 212
当 CP 由 0 跳变到 1 时,门 C 、 E 被打开 Q3 、 Q4 状态由门 F 、 G 决定,即 DQQQDQQ 32413
电路与电子技术基础
电路与电子技术基础
第十四章 触发器
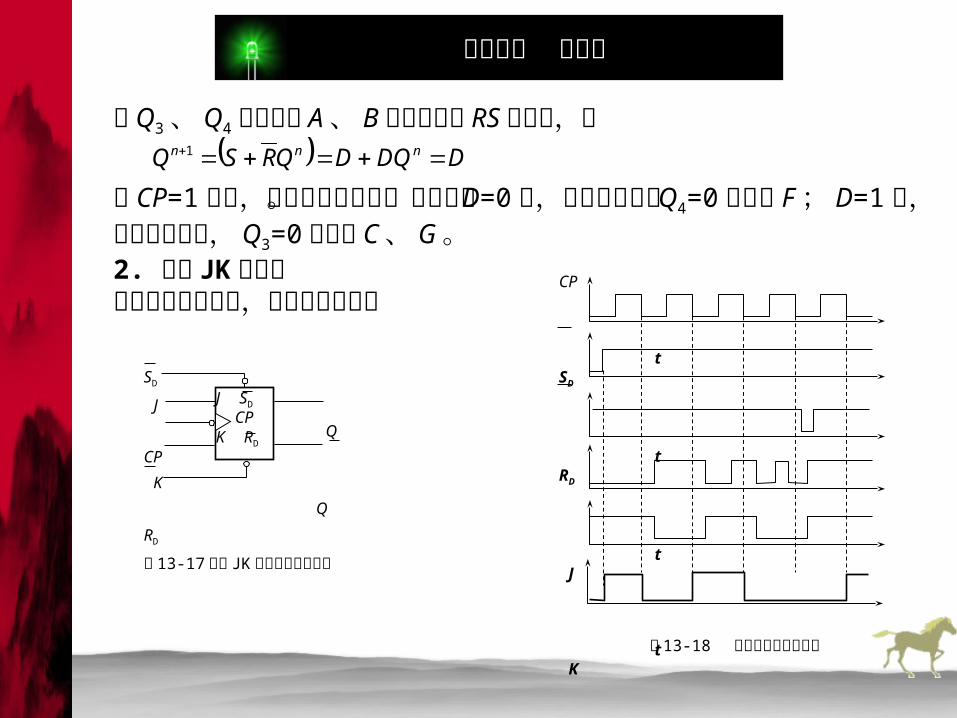
将 Q3 、 Q4 代入由门 A 、 B 组成的基本 RS 触发器,得 DDQDQRSQ nnn 1
在 CP=1 期间,输入信号被封锁。这是因为 D=0 时,触发器翻转后Q4=0 封锁门 F ; D=1 时,触发器翻转后, Q3=0 封锁门 C 、 G 。2. 边沿 JK 触发器逻辑符号如下左图,波形图如下右图
SD
J Q
CP
K Q
RD
图 13-17 边沿 JK 触发器逻辑符号图
J SD
CPK RD
CP
tSD
tRD
t J
t K
tQ
t
图 13-18 边沿触发器的波形图
电路与电子技术基础
电路与电子技术基础
第十四章 触发器
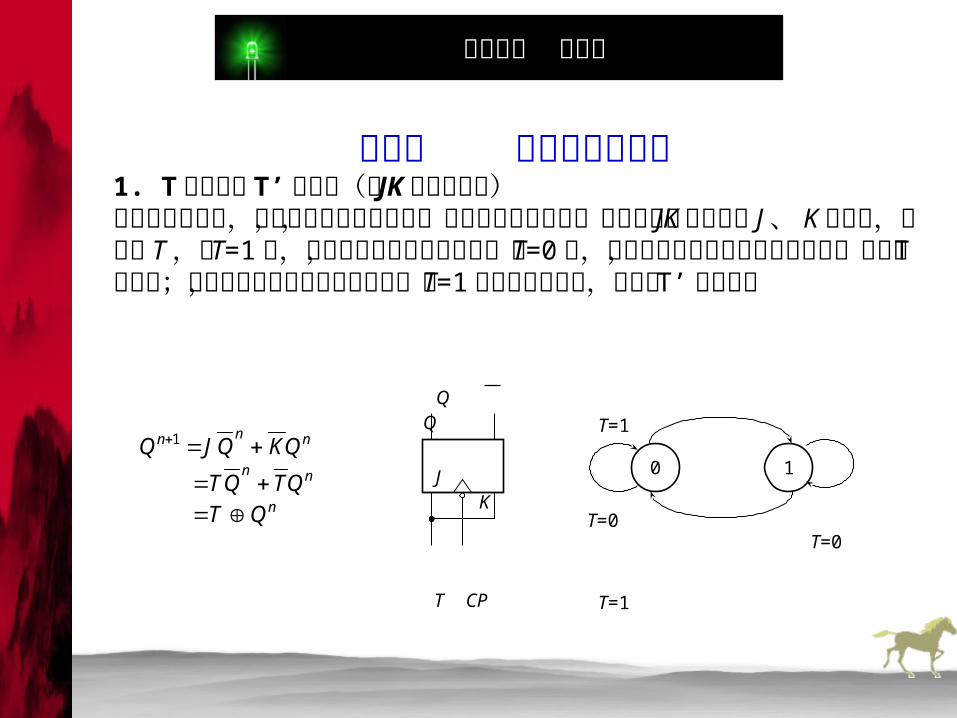
第五节 触发器类型转换1. T 触发器和 T’ 触发器(由 JK触发器转换)在使用触发器时,经常需要触发器或翻转,或维持不变的情况,这时只要将 JK 触发器的 J 、 K 端短接,取名为 T ,当 T=1 时,有时钟脉冲时触发器翻转,当 T=0 时,有时钟脉冲触发器状态维持不变,这就是 T 触发器;在仅需要翻转而不需要维持时,令 T=1 就只有翻转功能,这就是 T’ 触发器。
n
nn
nnn
QTQTQT
QKQJQ
1
T=1
T=0 T=0
T=1
0 1
Q Q
T CP
J K
电路与电子技术基础
电路与电子技术基础
第十四章 触发器
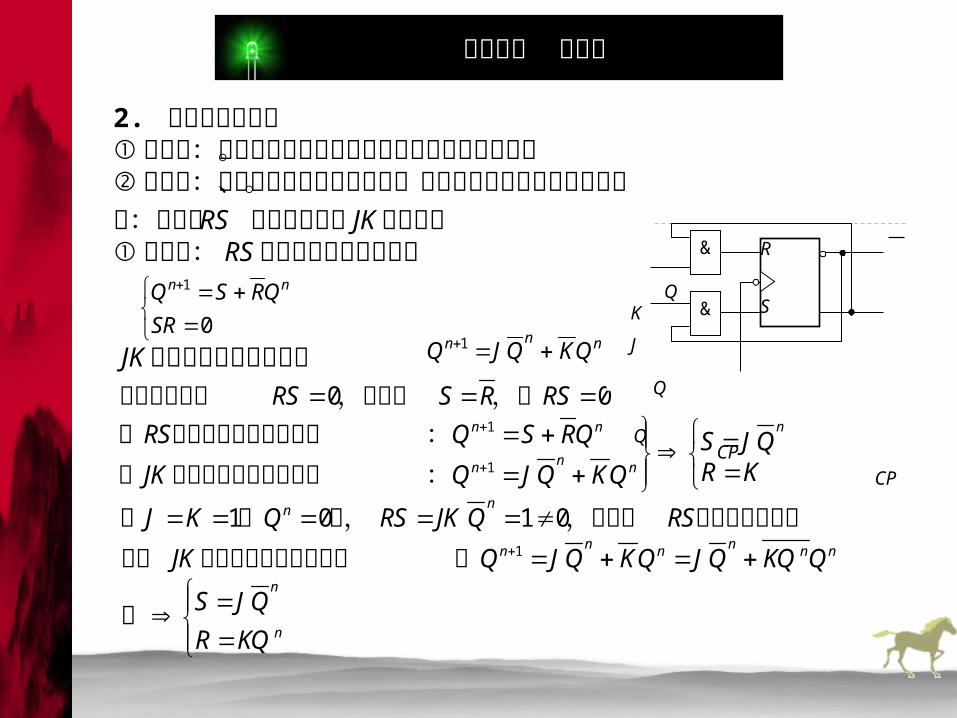
2. 触发器类型转换① 公式法:通过比较触发器的状态转移方程求转换逻辑。② 图形法:利用触发器的状态转移表、激励表和卡诺图求转换逻辑。例:将钟控 RS 触发器转换成 JK 触发器。① 公式法: RS 触发器状态转移方程为
0
1
SR
QRSQ nn
JK 触发器状态转移方程为 nnn QKQJQ 1
n
n
nnnnnn
nn
n
nnn
nn
KQR
QJS
QKQQJQKQJQJK
RSQJKRSQKJ
KRQJS
QKQJQJK
QRSQRS
RSRSRS
故
换触发器状态转移方程变故对
触发器约束条件,不满足时,且当
:触发器状态转移方程得由
:触发器状态转移方程得由,则,所以令因为约束条件
1
1
1
0101
00
输 Q
入 Q CP
待求触发器
转换逻辑 已有触发器
QK
J Q
CP
R
S
&
&
电路与电子技术基础
电路与电子技术基础
第十四章 触发器
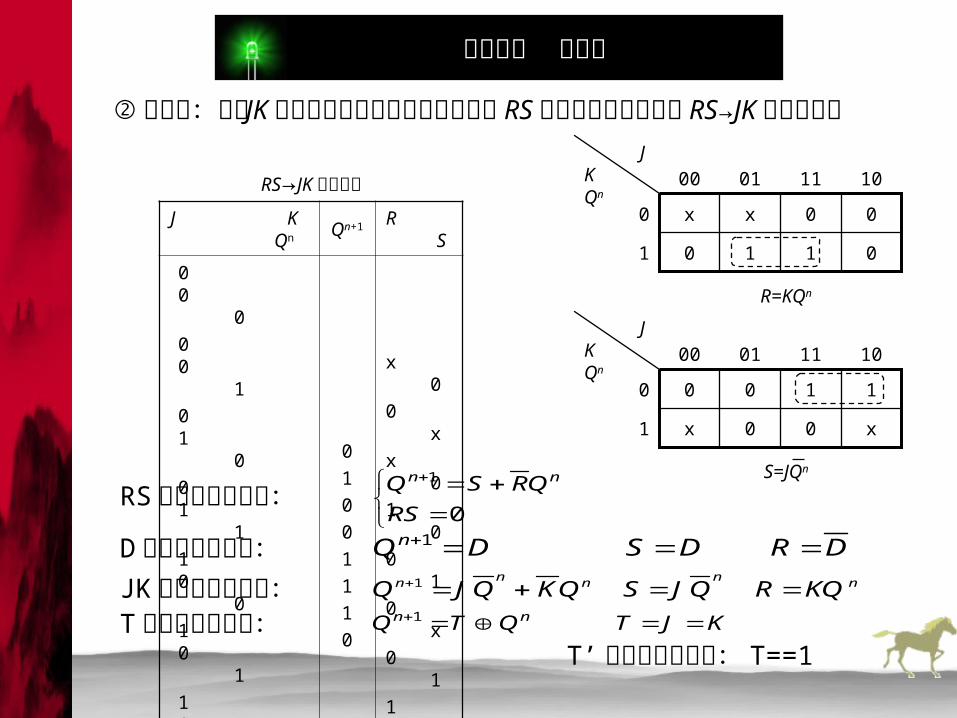
② 图形法:根据 JK 触发器的状态转移真值表和钟控 RS 触发器的激励表列出 RS→JK 的使用表。
RS→JK 的使用表
J K Qn Qn+1 R S
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
0
1
0
0
1
1
1
0
x 0
0 x
x 0
1 0
0 1
0 x
0 1
1 0
01101
00xx0
10110100
JKQn
R=KQn
x00x1
11000
10110100
JKQn
S=JQn
RS 触发器状态方程:
0
1
RS
QRSQ nn
D 触发器状态方程: DRDSDQn 1
JK 触发器状态方程: nnnnn KQRQJSQKQJQ 1
T 触发器状态方程: KJTQTQ nn 1
T’ 触发器状态方程: T==1
电路与电子技术基础
电路与电子技术基础
第十四章 触发器
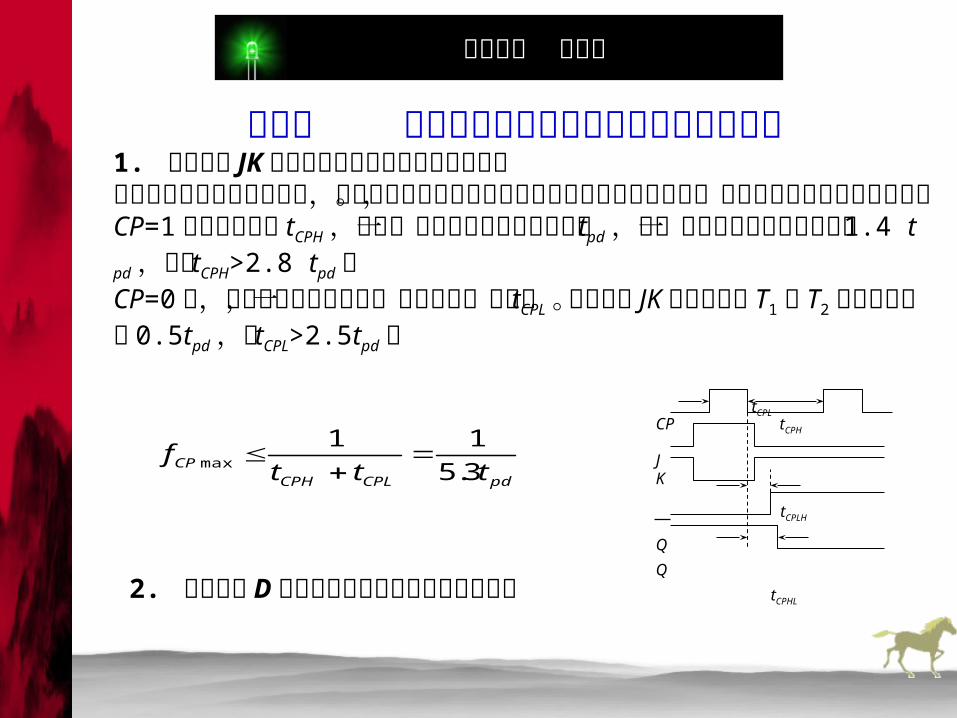
第六节 集成触发器的脉冲工作特性和动态参数1. 集成主从 JK触发器的脉冲工作特性和动态参数为了保证触发器的可靠运行,对时钟脉冲要求就是触发器的工作特性和动态参数。为了保证主触发器电平平稳, CP=1必须持续时间 tCPH ,若设一级与非门平均延迟时间为 tpd ,则一级或非门的延迟时间约为 1.4 tpd ,所以 tCPH>2.8 tpd 。CP=0 时,为了触发器输出稳定,也要持续一定时间 tCPL 。对于集成 JK 触发器中的 T1 和 T2 的延迟时间为 0.5tpd ,则 tCPL>2.5tpd 。
2. 维持阻塞 D触发器的脉冲工作特性和动态参数
pdCPLCPH
CP tttf
3.5
11max
tCPL
CP tCPH
JK tCPLH
Q
Q tCPHL