İTÜ GEMİ İNŞAATI VE DENİZ BİLİMLERİ FAKÜLTESİNDE ...timak.balikesir.edu.tr/pdf/...
10
399 İTÜ GEMİ İNŞAATI VE DENİZ BİLİMLERİ FAKÜLTESİNDE DÜZENLENMESİ YAPILAN BİLGİSAYAR DESTEKLİ ÖLÇME VE OTOMATİK KONTROL SİSTEMLERİ Yalçın ÜNSAN 1 1 İstanbul Teknik Üniversitesi, Gemi İnşaatı Mühendisliği Bölümü-İSTANBUL E-Posta: [email protected] Özet Bu makalede önerilen ve bir çok gemide başarı ile uygulanan ölçme sistemi aşağıda örneği verilen problemleri başarı ile çözmektedir. Eş zamanlı olarak, SGR (Strain-Gage Rosette: direnç telli gerilme ölçerler) bazlı şaft gücü ölçümü, pervanenin gemi üzerinde yapmış olduğu basıncın önceden belirlenen yerlerde ölçümü, daha önceden analiz edilip problem olacağı tahmin edilen yerlerde ivme ölçerler yardımı ile titreşim ölçümü, uydu bağlantısı yardımıyla geminin hızı, dünyanın manyetik alanının doğrultusu ve düşey ivmeler baz alınarak geminin bütün hareketlerinin (yalpa, dalıp çıkma, baş kıç vurma v.s.) tespiti, gemi olanaklarını kullanıp dalga durumunun tespiti. Bu makalede yukarıdaki sistemlerin nasıl kurulacağı, hangi aletlerin, hangi ölçme aralığında seçildiği, ölçme aletlerinin hangi şartlarda yerleştirildiği anlatılmaktadır. Bu tür ölçümler global anlamda çok az kuruluş tarafından gerçekleştirilebilmektedir. Yukarıda bahsi geçen konuların deneysel olarak ölçümü için gerekli olan donanımın mahiyeti makale içinde sunulmuştur. Bu yazıda belirtilmeyen çok önemli bir konu da deney setini kuran ve çalıştıran araştırmacıların bilgi, deneyim ve yetenekleridir. Anahtar Terimler : Endüstriyel Ölçme, Gemi İnşaatı, Deformasyon, Gerilme Abstract The measurement system, which is proposed in this paper, successfully applied to many ships solves the problems mentioned below In addition, strain-gauge based shaft power measurement, measurement of propeller pressure on the ship at pre-defined locations, vibration measurement by accelerometers at places where problems may most likely occur, determination of ship speed by satellite connection, determination of all ship motions (roll, heave, pitch etc.) based on magnetic field direction of the world/vertical accelerations and determination of wave conditions by using ship equipment are also realized simultaneously. This work explains how these systems are set up, what equipment are selected in what range, and in what conditions these equipment are placed. These type of measurements are carried out by a very few organizations globally. The details of the equipment which are to be used in the measurements are also explained in the paper. Another important aspect of these measurements, which was not mentioned in the paper, is the experience, knowledge and skill of the researchers who set up and run the experiment systems. Keywords: Industrial measurements, Naval Architecture, Deformation, Strain TİMAK-Tasarım İmalat Analiz Kongresi 26-28 Nisan 2006 - BALIKESİR
Transcript of İTÜ GEMİ İNŞAATI VE DENİZ BİLİMLERİ FAKÜLTESİNDE ...timak.balikesir.edu.tr/pdf/...

399
İTÜ GEMİ İNŞAATI VE DENİZ BİLİMLERİ FAKÜLTESİNDE DÜZENLENMESİ YAPILAN BİLGİSAYAR DESTEKLİ ÖLÇME VE
OTOMATİK KONTROL SİSTEMLERİ
Yalçın ÜNSAN 1
1 İstanbul Teknik Üniversitesi, Gemi İnşaatı Mühendisliği Bölümü-İSTANBUL E-Posta: [email protected]
Özet
Bu makalede önerilen ve bir çok gemide başarı ile uygulanan ölçme sistemi aşağıda örneği verilen problemleri başarı ile çözmektedir. Eş zamanlı olarak, SGR (Strain-Gage Rosette: direnç telli gerilme ölçerler) bazlı şaft gücü ölçümü, pervanenin gemi üzerinde yapmış olduğu basıncın önceden belirlenen yerlerde ölçümü, daha önceden analiz edilip problem olacağı tahmin edilen yerlerde ivme ölçerler yardımı ile titreşim ölçümü, uydu bağlantısı yardımıyla geminin hızı, dünyanın manyetik alanının doğrultusu ve düşey ivmeler baz alınarak geminin bütün hareketlerinin (yalpa, dalıp çıkma, baş kıç vurma v.s.) tespiti, gemi olanaklarını kullanıp dalga durumunun tespiti. Bu makalede yukarıdaki sistemlerin nasıl kurulacağı, hangi aletlerin, hangi ölçme aralığında seçildiği, ölçme aletlerinin hangi şartlarda yerleştirildiği anlatılmaktadır. Bu tür ölçümler global anlamda çok az kuruluş tarafından gerçekleştirilebilmektedir. Yukarıda bahsi geçen konuların deneysel olarak ölçümü için gerekli olan donanımın mahiyeti makale içinde sunulmuştur. Bu yazıda belirtilmeyen çok önemli bir konu da deney setini kuran ve çalıştıran araştırmacıların bilgi, deneyim ve yetenekleridir.
Anahtar Terimler : Endüstriyel Ölçme, Gemi İnşaatı, Deformasyon, Gerilme Abstract
The measurement system, which is proposed in this paper, successfully applied to many
ships solves the problems mentioned below In addition, strain-gauge based shaft power measurement, measurement of propeller pressure on the ship at pre-defined locations, vibration measurement by accelerometers at places where problems may most likely occur, determination of ship speed by satellite connection, determination of all ship motions (roll, heave, pitch etc.) based on magnetic field direction of the world/vertical accelerations and determination of wave conditions by using ship equipment are also realized simultaneously. This work explains how these systems are set up, what equipment are selected in what range, and in what conditions these equipment are placed. These type of measurements are carried out by a very few organizations globally. The details of the equipment which are to be used in the measurements are also explained in the paper. Another important aspect of these measurements, which was not mentioned in the paper, is the experience, knowledge and skill of the researchers who set up and run the experiment systems. Keywords: Industrial measurements, Naval Architecture, Deformation, Strain
TİMAK-Tasarım İmalat Analiz Kongresi 26-28 Nisan 2006 - BALIKESİR

400
1. GİRİŞ
Son bir kaç senedir Türkiye Gemi İnşaatı Sanayi bir talep patlaması ile karşı karşıyadır. Bu durum ise; tersanelerin zamanı optimum kullanması açısından son derece önemlidir. Genellikle tersaneler ürettikleri gemileri seyir tecrübesinden hemen sonra teslim edip, bir sonraki işleri ile ilgilenmek istemektedirler. Ancak genellikle gecikme problemleri yaşanmaktadır. Bu durumda problemin sistemin hangi aşamasında oluştuğunu, ancak gemi üzerinde ölçüm yapılarak cevaplandırılabilmektedir.
Seyir tecrübeleri, yeni inşa edilen bir gemide yapılan en önemli operasyondur. Seyir tecrübesi, geminin tüm aksamının kurallara uygun çalışıp çalışmadığını deniz şartlarında kontrol edilmesini sağlayan ve bir kaç gün süren bir süreçtir. Bu aşamada, geminin elektrik, elektronik, makine, yardımcı makineleri gibi donanımında çıkan problemler kısa sürede düzeltilebilecek mahiyettedir. Ancak Gemi İnşaat Mühendisliği konularının içine giren bir çok konuda çıkabilecek problemlerin çözümü çok zor olduğu gibi, problemin nedenini saptamak bile çok zordur. Örneğin seyir tecrübesinde istenilen hızda gidemeyen bir geminin problemleri şunlar olabilir: Gemi formu uygun değildir, ana makine yeterli güç üretemiyordur, ana makine ile pervane arasındaki sevk elemanlarının verimi düşüktür, pervane istenilen devirde dönmüyordur, yağlama problemi olabilir, pervane karakteristik değerleri uygun olmayabilir, v.s. Bu durum armatör ile tersane arasındaki şartnameye uymamasına karşılık gelir ki, tersanenin önemli tazminatlar ödemesine sebep olur. Yukarıda belirtilen parametrelerin hemen hepsi ayrı firmalar tarafından gerçekleştirildiği için genellikle firmalar arası bir anlaşmazlığa neden olmaktadır. Türkiye’de yapılan gemilerin ortalama maliyetlerinin 20 Milyon $ civarında olduğu düşünülürse, ortaya çıkan problemlerdeki tazminat miktarının da önemli meblağlara ulaşacağı aşikardır.
Bu aşamada Gemi İnşaatı Mühendisliği ile ilgili sürdürülen bu tam ölçekli ölçme çalışmalarının sadece sorun giderme üzerine gerçekleştirilmediğini, geminin performansının hesaplanması için geliştirilen hesap yöntemlerinin kontrol edilmesi için veri elde edilmesi çalışmalarını da içerdiğini belirtmek yerinde olacaktır. 2. NEDEN TAM ÖLÇEKLİ ÖLÇME ?
Bütün mühendislik disiplinlerinde deneysel çalışmalar bilimsel çalışmanın çok önemli bir bölümünü oluşturur. Deney tümevarımsal veya tümdengelimsel yöntemlerin ana elemanlarından birisidir. Ancak yerçekimsel kuvvetlerin ihmal edilemediği büyük ölçekli problemlerin küçük ölçekli modelleri, bilindiği gibi belli kabuller altında, kabul edilebilir hata fonksiyonları dahilinde yapılabilir. Bu durum modellemede önemli sıkıntılar yaratmaktadır.
Gemi iki farklı ortamın ara yüzeyinde çalışan ve yüksek oranda dinamik yüklerin arasında çalışan bir mühendislik yapısıdır. Gemiler üzerine etkiyen atalet kuvvetleri, dünya üzerinde mühendislik hizmeti almış çok az yapıda rastlanabilir. Gemi hareketlerinin analizi veya mukavemetinin kontrolü v.s. deneyler için kurulacak küçük ölçekli modellerde, gemi üzerindeki bu atalet kuvvetlerini uygun bir şekilde modellemek ya çok zordur ya da belli kabuller adlında yapılabilir. Bu durumda yapılan deneyden bulunan sonuçların güvenirliliği sorun yaratmaktadır.
Gemi üzerine gelen kuvvetler belli bir fonksiyona benzemediği gibi, rastlantısal ve sınır değerleri kesin olarak belli değildir. Kaotik bir ortam içinde çalışan gemide bu kadar belirsizliğin olması, kurulacak küçük ölçekli bir modelde sonuçların gerçeğe yakın çıkmasını zorlaştırmaktadır.
Tam ölçekli ölçmeler gemilerde problem olan bir çok belirsizliğe ve kabullere çözüm olmaktadır. Ancak laboratuar ortamı dışında yapılan ölçmelerde ortam şartlarının kontrolü deney yapandan ziyade doğaya kalmaktadır. Gemi üzerinde yapılan bu ölçmeler hem deney sistemini oluşturan bileşenler açısından, hem de deney şartlarını hazırlamak açısından çok pahalıdır. Bir

401
günlük bir seyir tecrübesinde onlarca görevli gemide görev aldığı gibi 40.000 beygire kadar çıkan güçleriyle ana makine ve jeneratörlerin tükettiği yakıt (fuel-oil) düşünülürse ekonomik açıdan maliyetin önemi ortaya çıkmaktadır. Bu sebeplerden dolayı bir bilim adamı sponsor olmadan tam ölçekli bir bilimsel deney yapmasının zorluğu görülmektedir. Deneysel çalışmaların çoğunun seyir tecrübesi sırasında yapılmasının en önemli nedeni, maddi olarak bir külfet oluşturmadan deneyin yapılmasıdır. Bütün bu olumsuzluklara karşın kurallara uygun yapılan tam ölçekli deneyler en güvenilir sonuçları vermektedir. 3. GEMİ İNŞAATI’NDA TAM ÖLÇEKLİ ÖLÇMELER İÇİN KULLANILAN EKİPMAN
Deney sisteminde kullanılan araçların ana amacı, belirlemek istenilen fiziksel büyüklüğü ölçülebilir bir fiziksel büyüklüğe çevirmektir. Bu amaçla kullanılan ekipmanı aşağıdaki gibi kısımlara ayırabiliriz:
� Algılayıcılar, � Yükselticiler � Sayısal (Analog / Dijital) çeviriciler, � Bilgisayar � Bilgisayar programı.
Algılayıcılar : Algılayıcılar ölçülecek fiziksel büyüklükleri bilgisayarın anlayabileceği fiziksel bir büyüklüğe dönüştürür. Dönüştürülen bu büyüklük genellikle; elektrik potansiyeli, ışık şiddeti, görüntü, manyetik alan vs. şeklindedir. Bizim kullandığımız büyüklük genellikle elektrik potansiyelidir. Gemi inşaatında yapılan ölçümlerin başında bir kuvveti veya kuvvetin yarattığı etkiyi ölçmek gelir. Bu ölçme için ya hazır ya da İTÜ Gemi İnşaatı ve Deniz Bilimleri Fakültesi’nde geliştirilen dönüştürücüler kullanılmaktadır. Dönüştürücülerin ana elemanı SGR [1] veya piezo-elektrik malzeme olmaktadır. Bunların başında basınç ve gerilme algılayıcıları gelmektedir [2].
Bu algılayıcıların dışında konum belirlemek amacıyla dGPS, gemi hareketlerinin algılanması için yerin manyetik alan vektörüne göre çalışan manyetik bir algılayıcı ve titreşim ölçümleri için ivme ölçerler gelmektedir. SGR Göstericiler ve Yükselticiler : Tam köprü SGR veya piezo-elektrik devresine bağlanan aletler, köprüye verilen voltajın çıkış değerinin µV seviyesindeki sinyal değişimini algılayarak güçlü bir çıkış sinyaline çevirirler. Çıkan bu yükseltilmiş voltaj değeri sayısal dönüştürücüye iletilir. Sayısal Dönüştürücüler : Dönüştürücüler, STR göstericilerden gelen sayısal olmayan sinyalleri bilgisayarın anlayacağı dijital sinyallere dönüştürmektedir. Kullanılan dönüştürücüler saniyede yüzlerce ölçüm yapabilme kapasitesine sahiptirler. Kablolama, Bağlantı Elemanları ve Güç Kaynağı: Ölçme sisteminde döşenecek kablo ağı, kablo damarı seviyesinde oldukça uzun olmaktadır. Ölçüm yapılan yerlerde uzaktan algılama sistemleri etraftaki manyetik kirlilik nedeniyle genellikle çalışmamaktadır. Ayrıca sistemler genellikle tam doğru akım edilmiş ve düzeltilmiş edilmiş güç kaynağına ihtiyaç göstermektedir. Bilgisayar : Bilgisayar, gelen sayısal sinyalleri üzerindeki program vasıtası ile işleyecek kapasitede seçilmektedir. Burada gözden kaçırılmaması gereken parametre rutubettir. Gemilerin bulunduğu ortam nedeni ile bilgisayar darbelere ve rutubete dayanıklı bir sistem seçilmektedir. Algılanan Datayı İşleyecek Bilgisayar Programı :Tam ölçekli ölçmeler için Lab- View programı kullanılmaktadır. Yazılımlar, bu program içinde yazarlar tarafından geliştirilmektedir.
402
SGVERİCİ
ANTEN ŞERİT
OPTİK GÖZALICI
ŞAFT
ALICI A/D CEVİRİCİ BİLGİSAYAR
SG
Potansiyometre
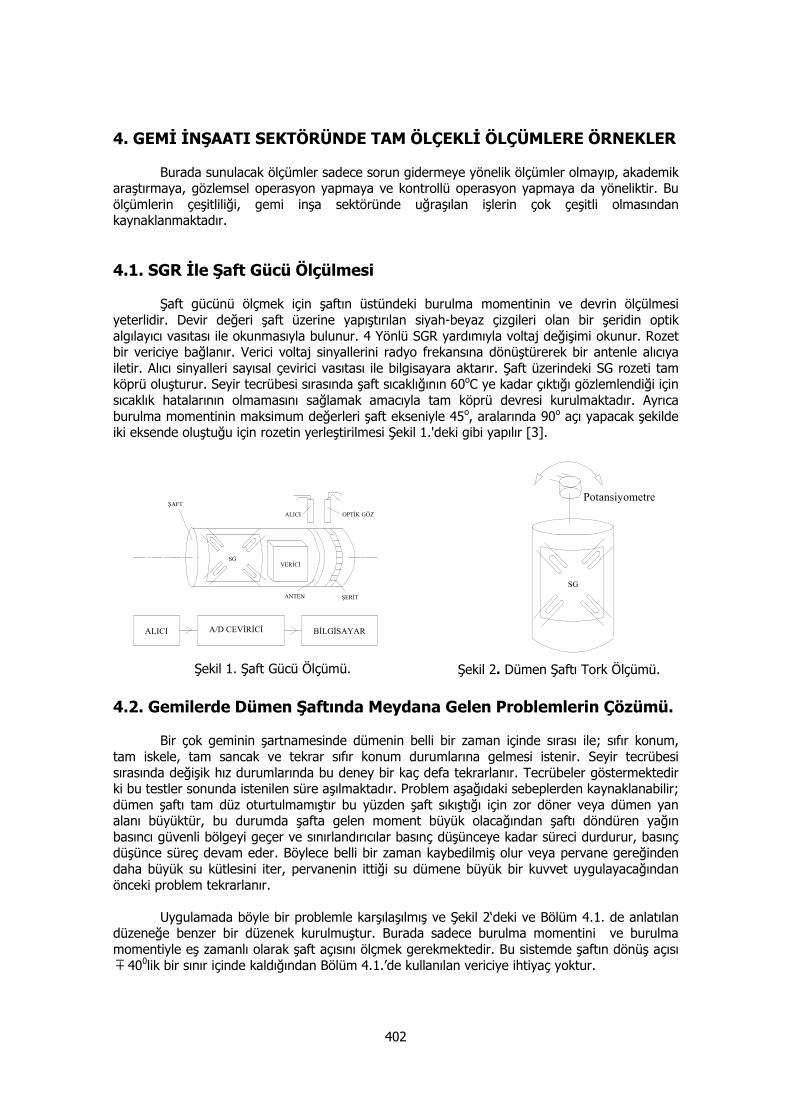
Şekil 1. Şaft Gücü Ölçümü. Şekil 2. Dümen Şaftı Tork Ölçümü.
4. GEMİ İNŞAATI SEKTÖRÜNDE TAM ÖLÇEKLİ ÖLÇÜMLERE ÖRNEKLER
Burada sunulacak ölçümler sadece sorun gidermeye yönelik ölçümler olmayıp, akademik araştırmaya, gözlemsel operasyon yapmaya ve kontrollü operasyon yapmaya da yöneliktir. Bu ölçümlerin çeşitliliği, gemi inşa sektöründe uğraşılan işlerin çok çeşitli olmasından kaynaklanmaktadır. 4.1. SGR İle Şaft Gücü Ölçülmesi
Şaft gücünü ölçmek için şaftın üstündeki burulma momentinin ve devrin ölçülmesi yeterlidir. Devir değeri şaft üzerine yapıştırılan siyah-beyaz çizgileri olan bir şeridin optik algılayıcı vasıtası ile okunmasıyla bulunur. 4 Yönlü SGR yardımıyla voltaj değişimi okunur. Rozet bir vericiye bağlanır. Verici voltaj sinyallerini radyo frekansına dönüştürerek bir antenle alıcıya iletir. Alıcı sinyalleri sayısal çevirici vasıtası ile bilgisayara aktarır. Şaft üzerindeki SG rozeti tam köprü oluşturur. Seyir tecrübesi sırasında şaft sıcaklığının 60oC ye kadar çıktığı gözlemlendiği için sıcaklık hatalarının olmamasını sağlamak amacıyla tam köprü devresi kurulmaktadır. Ayrıca burulma momentinin maksimum değerleri şaft ekseniyle 45o, aralarında 90o açı yapacak şekilde iki eksende oluştuğu için rozetin yerleştirilmesi Şekil 1.'deki gibi yapılır [3].
4.2. Gemilerde Dümen Şaftında Meydana Gelen Problemlerin Çözümü.
Bir çok geminin şartnamesinde dümenin belli bir zaman içinde sırası ile; sıfır konum, tam iskele, tam sancak ve tekrar sıfır konum durumlarına gelmesi istenir. Seyir tecrübesi sırasında değişik hız durumlarında bu deney bir kaç defa tekrarlanır. Tecrübeler göstermektedir ki bu testler sonunda istenilen süre aşılmaktadır. Problem aşağıdaki sebeplerden kaynaklanabilir; dümen şaftı tam düz oturtulmamıştır bu yüzden şaft sıkıştığı için zor döner veya dümen yan alanı büyüktür, bu durumda şafta gelen moment büyük olacağından şaftı döndüren yağın basıncı güvenli bölgeyi geçer ve sınırlandırıcılar basınç düşünceye kadar süreci durdurur, basınç düşünce süreç devam eder. Böylece belli bir zaman kaybedilmiş olur veya pervane gereğinden daha büyük su kütlesini iter, pervanenin ittiği su dümene büyük bir kuvvet uygulayacağından önceki problem tekrarlanır.
Uygulamada böyle bir problemle karşılaşılmış ve Şekil 2‘deki ve Bölüm 4.1. de anlatılan düzeneğe benzer bir düzenek kurulmuştur. Burada sadece burulma momentini ve burulma momentiyle eş zamanlı olarak şaft açısını ölçmek gerekmektedir. Bu sistemde şaftın dönüş açısı m 400lik bir sınır içinde kaldığından Bölüm 4.1.’de kullanılan vericiye ihtiyaç yoktur.
403
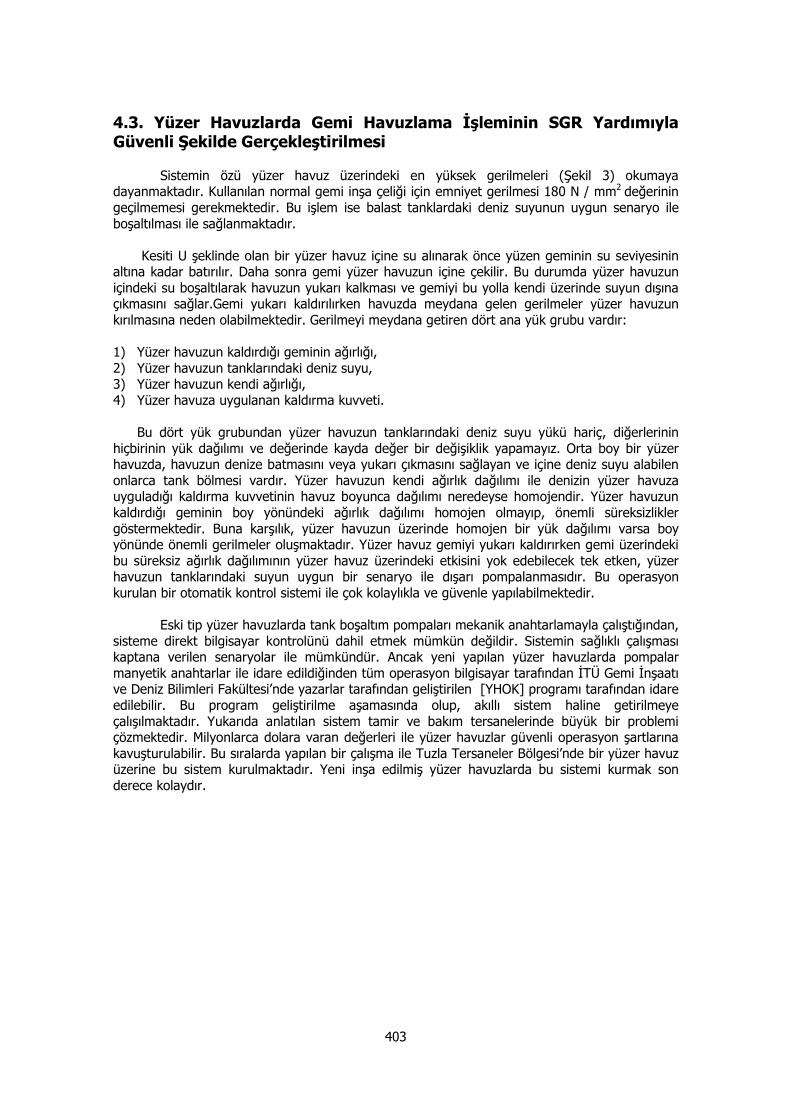
4.3. Yüzer Havuzlarda Gemi Havuzlama İşleminin SGR Yardımıyla Güvenli Şekilde Gerçekleştirilmesi
Sistemin özü yüzer havuz üzerindeki en yüksek gerilmeleri (Şekil 3) okumaya dayanmaktadır. Kullanılan normal gemi inşa çeliği için emniyet gerilmesi 180 N / mm2
değerinin geçilmemesi gerekmektedir. Bu işlem ise balast tanklardaki deniz suyunun uygun senaryo ile boşaltılması ile sağlanmaktadır. Kesiti U şeklinde olan bir yüzer havuz içine su alınarak önce yüzen geminin su seviyesinin altına kadar batırılır. Daha sonra gemi yüzer havuzun içine çekilir. Bu durumda yüzer havuzun içindeki su boşaltılarak havuzun yukarı kalkması ve gemiyi bu yolla kendi üzerinde suyun dışına çıkmasını sağlar.Gemi yukarı kaldırılırken havuzda meydana gelen gerilmeler yüzer havuzun kırılmasına neden olabilmektedir. Gerilmeyi meydana getiren dört ana yük grubu vardır: 1) Yüzer havuzun kaldırdığı geminin ağırlığı, 2) Yüzer havuzun tanklarındaki deniz suyu, 3) Yüzer havuzun kendi ağırlığı, 4) Yüzer havuza uygulanan kaldırma kuvveti.
Bu dört yük grubundan yüzer havuzun tanklarındaki deniz suyu yükü hariç, diğerlerinin hiçbirinin yük dağılımı ve değerinde kayda değer bir değişiklik yapamayız. Orta boy bir yüzer havuzda, havuzun denize batmasını veya yukarı çıkmasını sağlayan ve içine deniz suyu alabilen onlarca tank bölmesi vardır. Yüzer havuzun kendi ağırlık dağılımı ile denizin yüzer havuza uyguladığı kaldırma kuvvetinin havuz boyunca dağılımı neredeyse homojendir. Yüzer havuzun kaldırdığı geminin boy yönündeki ağırlık dağılımı homojen olmayıp, önemli süreksizlikler göstermektedir. Buna karşılık, yüzer havuzun üzerinde homojen bir yük dağılımı varsa boy yönünde önemli gerilmeler oluşmaktadır. Yüzer havuz gemiyi yukarı kaldırırken gemi üzerindeki bu süreksiz ağırlık dağılımının yüzer havuz üzerindeki etkisini yok edebilecek tek etken, yüzer havuzun tanklarındaki suyun uygun bir senaryo ile dışarı pompalanmasıdır. Bu operasyon kurulan bir otomatik kontrol sistemi ile çok kolaylıkla ve güvenle yapılabilmektedir.
Eski tip yüzer havuzlarda tank boşaltım pompaları mekanik anahtarlamayla çalıştığından, sisteme direkt bilgisayar kontrolünü dahil etmek mümkün değildir. Sistemin sağlıklı çalışması kaptana verilen senaryolar ile mümkündür. Ancak yeni yapılan yüzer havuzlarda pompalar manyetik anahtarlar ile idare edildiğinden tüm operasyon bilgisayar tarafından İTÜ Gemi İnşaatı ve Deniz Bilimleri Fakültesi’nde yazarlar tarafından geliştirilen [YHOK] programı tarafından idare edilebilir. Bu program geliştirilme aşamasında olup, akıllı sistem haline getirilmeye çalışılmaktadır. Yukarıda anlatılan sistem tamir ve bakım tersanelerinde büyük bir problemi çözmektedir. Milyonlarca dolara varan değerleri ile yüzer havuzlar güvenli operasyon şartlarına kavuşturulabilir. Bu sıralarda yapılan bir çalışma ile Tuzla Tersaneler Bölgesi’nde bir yüzer havuz üzerine bu sistem kurulmaktadır. Yeni inşa edilmiş yüzer havuzlarda bu sistemi kurmak son derece kolaydır.

404
Şekil 3. Yüzer havuzun kiriş modeli ile gerilme dağılımı SGR dağılımı.
4.4. Gemilerde Meydana Gelebilecek Aşırı Gerilmeler İçin SGR Yardımıyla Kurulabilecek Erken Uyarı Sistemleri
Bu sistem için daha önce mukavemet hesapları yapılmış geminin kritik noktalarına SG rozetleri yapıştırılır. Gerilme yönleri belli olmadığından bu SG rozetleri çok eksenli olmalıdırlar. Bu rozetler bir sayısal çevirici vasıtası ile bilgisayara bağlanır. Bilgisayara daha önce girilmiş olan sınır değerler aşıldığında sistem bir şekilde ikaz eder. Hatta bilgisayara denizli havalarda aşırı gerilmeler olduğu zaman hız kesme veya motor soğutma suyunun çıkışının aşırı ısındığı durumlarda soğutma suyunun debisini arttırma gibi mekanik görevleri de SGR yardımıyla verebiliriz.
-20
-10
0
10
20
30
40
50
60
70
1
10
19
28
37
46
55
64
73
82
91
100
109
118
127
136
145
154
163
172
181
190
199
208
217
226
sehim (cm) gerilme dip (Çekme N/mm2) gerilme güv. (Basınç N/mm2)
P C
S t r a i n g a u g e k ö p r ü A D Ç e v i r i c i
R S 4 8 5 - R S 2 3 2 Ç e v i r i c i
R S 4 8 5
R S 2 3 2

405
Direnç Kuvveti
Direnç Kuvveti
Algılayıcı hazırlanırken çekilecek geminin büyüklüğünü göz önüne almalıyız. Algılayıcının şekil değiştirmesi dirence göre çok küçükse (algılayıcının boyutları fazla ise) ölçüm hassasiyeti kaybolur, tam tersi şekil değiştirme çok büyükse algılayıcı için lineer-elastik bölgenin dışına çıktığımız için algılayıcı zarar görür. Çekilen geminin büyüklüğüne göre farklı algılayıcılar hazırlanmalıdır.
4.5. Römorkör Yardımı ile Çekilen Bir Geminin Direnç Ölçümü.
Bu tür ölçümlere genellikle beklenilen hızda gitmeyen yeni inşa edilmiş gemilerde ihtiyaç duyulur. Geminin hızı pervaneye, gemi formuna, su çekimine, makine gücüne, redüksiyon verimlerine gibi faktörlere bağlıdır. Geminin model deneyleri daha önceden yapılmış bile olsa gerek kabullerden gerekse veri akışı sırasında uyumsuzluktan kaynaklanan problemler olabilir. Deney tekniğinden dolayı en iyi deney şartları 1:1 ölçekte sağlanır. Gemilerin inşa aşamasında makine, pervane ve güç iletim sistemleri ayrı firmalar tarafından yapılmış olabilir. Gemi istenilen hızda gitmediğinde bu firmalar tarafından ilk suçlanan geminin formu olur. Geminin direnci Şekil 4’deki gibi bir SG algılayıcının gemi ile römorkör arasındaki halata seri olarak bağlanarak ölçülebilir.
Şekil 4. Çelik Halat Algılayıcısı.
4.6. Şaft Yataklarında Titreşim Ölçümleri Geminin çeşitli bölümlerinde titreşim değerlerinin ölçülmesi ve standartlara göre analiz edilmesi gemi yapım ve tadilat kontratlarında gittikçe daha fazla oranda istenmektedir. Bu konuda kural kuruluşlarının kabul ettiği standartlara bir örnek Şekil 5’de verilmiştir.[4] Burada görüldüğü gibi titreşim, frekans tabanında incelenmekte olup, titreşim genliği, hızı ve ivmesi arasında her harmonik için:
)Cos( Xx(t) tω= (1)
)2/Cos( X(t)xv(t) πωω +== t& (2)
)Cos( X(t)a(t) 2πωω +== tv& (3)
X : Titreşim genliği ω : Titreşim frekansı
Şekil 5. Örnek Titreşim Ölçümü.

406
Titreşimin standartlarla belirlenen seviyelerin üstüne çıkması gemi personelinin uzun süre çalışmasını olanaksız kılmaktadır. Üst yapılarda ve makine dairesinde personel çalışması için titreşim hızlarının I. bölgede kalması gereklidir. II. Bölge ise titreşimin hissedilebilir ve bazı yan tesirlerinin görülebildiği bölgedir. Bu bölge, personelin devamlı çalışmadığı gemi makinelerinin bulunduğu bölgelerde kabul edilebilir sınırı içermektedir. III. Bölge ise titreşim açısından kabul edilemez bölgedir. Gemilerin seyir tecrübelerinde şaft yatakları üzerine yerleştirilen ivme algılayıcıları vasıtası ile düşey ve yatay ivmeler ölçülerek zaman kayıtları alınır. Bu kayıtlar frekans tabanında standartlara göre incelenir. Her güç kademesinde yatay ve düşey titreşimler bu standartlar ile karşılaştırılmalıdır. Titreşimlerin I. bölgede, yani tam güvenli bölgede kaldığı gözlemlenmelidir. 4.7. Gemi Üzerinde Pervane Basınçlarının Ölçülmesi
Pervane çalışması sırasında tekne yüzeyinde oluşan basınç alanı, pervaneye gelen akımın gemi izi dolayısı ile düzgün olmaması nedeniyle zamana bağlı değişimler gösterir. Bu değişimler genelde şaft dönme frekansı ve kanat frekansı ile aynı frekanstadır. Ancak kavitasyon gibi problemler akımın değişik frekanslarda basınç indüklemesine sebep olur. Mevcut ölçüm sistemi içerisinde bu basınçların ölçülmesi için basınç algılayıcıları kullanılmaktadır. 4.8. Gemi Hızının GPS ile Ölçülmesi
Gemi hızı seyir tecrübelerinde iki metotla ölçülmektedir. A) Geleneksel olarak sahilde işaretler veya şamandıralar arasında 1 deniz mili işaretlenmekte
gemi istenen hıza eriştiğinde bu işaretler arasındaki seyir süresi ölçülüp, gemi hızı elde edilmektedir.
B) Uydu seyir sistemlerinin gelişmesi ile GPS sistemleri gemi hızı algılamakta kullanılmaya
başlanmıştır. Standart GPS sinyalleri 5 ila 15 m hassasiyetle yeryüzü üzerindeki konumu verebilmektedir. Ancak eğer standart GPS ile anlık hızlar okunduğu takdirde GPS hassasiyetinin (yeterli olmaması nedeniyle istenen hız değerlerinin saptanması mümkün değildir. Diferansiyel GPS (dGPS) sistemleri algılama hassasiyetini bir yer istasyonu kullanarak geliştirmekte 1.m.ye varan hassasiyetlere erişmek mümkün olmaktadır.
Mevcut ölçüm sistemi için 1 m hassasiyetli dGPS sistemi kullanılmakta, ölçümün anlık
ölçümler yerine 10 dakika kadar sabit rejimde yapılması yolu ile % 0.1 doğrulukta ortalama hız ölçümleri gerçekleştirilebilmektedir. 4.9. Gemi Rotasının ve Hareketlerinin Ölçülmesi
Gemi rotasının bilgisayar yardımı ile ölçülmesi için manyetik pusula kullanılmakta olup, 2 adet ivme algılayıcı yardımı ile düşey düzlem hareketlerinin etkileri ölçümlerde düzeltilebilmektedir. Ayrıca bu iki ivme algılayıcı verileri gemi meyil ve trim (geminin boy yönündeki dengesizliği) açılarının veya yalpa ve baş kıç vurma açılarının ölçülmesi için kullanılmaktadır. 5. GEMİ PERFORMANS ÖLÇÜMÜ İÇİN KOMPLE BİR ÖLÇÜM ŞEKLİ
En genel halde, şaft güç/itme ölçüm, titreşim ölçüm, gemi hızı ve rotası ölçüm, pervane basınç alanı ölçüm sistemi bir araya getirilmiştir. Köprü üstü ve makine dairesi için sistem blok

407
KÖPRÜ ÜSTÜ ÖLÇÜM SİSTEMİ
dGPS alıcı
Bilgisayar
GEMİ HIZI, KONUM ÖLÇÜMÜ
ROTA ÖLÇÜMÜ
Elektronik Pusula (Rota, meyil, trim)
DÜMEN AÇISI ÖLÇÜMÜ
RÜZGAR ÖLÇÜMÜ
Kamera
Aalog Dijital Çevirici
Rüzgar sensörü
dGPS Anten
Network
diyagramı Şekil 6’da verilmiştir. Gemilerde seyir tecrübesi sırasında güç ölçümü çeşitli dış faktörlere maruz kalmaktadır. Bunlar rüzgar, akıntı, dalga, sıcaklık ve deplasman değişimleridir. Bu faktörler ISO 15016 prosedürü kullanılarak değerlendirilebilir[5,6].
Şekil 6. Makine Dairesi Şaft Gücü Ölçümü.
MAKİNE DAİRESİ
Şaft devir algılayıcısı
Alıcı
Şaft
Şaft devir sayıcı Alıcı
Anten Pil kutus
Strain gauge İletici
Strain Gauge
İTME ÖLÇÜMÜ
Analog Dijital Çevirici
Bilgisayar
Anten Reflector şerit Pil Kutusu
Strain gauge iletici
Strain Gauge
MOMENT ÖLÇÜMÜ DEVİR ÖLÇÜMÜ
408
6. SONUÇ ve TAVSİYELER Seyir tecrübeleri iki ayrı amaç için icra edilebilir. Standart seyir tecrübeleri, İnşa ve modernizasyon sonucunda geminin istenen güçte istenen hızı verdiğini göstermek için yapılan seyir tecrübeleridir. Bu tecrübeler MARPOL Annex VI’da istenmektedir. Problem amaçlı seyir tecrübeleri, Gemi sevk sisteminde oluşan problemleri ve çözümlerini belirlemek için yapılan seyir tecrübeleri. Bu tecrübeler şaft güç ölçümleri, titreşim ölçümleri, pervane basınç alanı ölçümlerini içermektedir. Gerek burulma gerekse düşey ve yatay titreşimlerin incelenmesi, gemi çalışma şartlarının belirlenmesi için önemli detaylardır. Bu tip ölçümler; pervane çalışma karakteristikleri, pervaneden doğabilecek problemler ve ana makine şaft sisteminden doğabilecek problemler üzerinde önemli uyarılar vermektedir. Bu ölçümlerin gemi periyodik kontrollerde yapılması, gemi sevk sisteminin uygun kullanım süresinin uzatılması için son derece yararlıdır. Günümüzde yurtdışına yapılan gemilerle önem kazanan şartnameye uygunluk testleri ve şaft güç aktarma organlarında çıkabilecek her türlü hata tespit ve düzeltme çalışmaları bu sistemler ile yapılabilir. Gerçek bir problemin kurulan matematiksel modelleri veya deneysel modelleri kabul edilebilir hata sınırları içindedir. Ancak tam ölçekli bir deneysel modelde en azından yükler gerçek olup kabul içermediğinden ölçüm sonuçları gerçeğe daha yakındır.
Deney yapmak gerçekte çok zordur, ancak gerçek şartlarda ortam yaratarak deneyin düzenlenmesi çok daha zordur. Laboratuarda ortam şartları büyük oranda deneycinin elinde olmakla birlikte tam ölçekli deney koşullarında ortam şartı genellikle doğa ve sistemi idare eden kişilerde olmaktadır. Bu şartlar deneyin çok kısa sürede ve deney tekrarını gerektirmeyecek bir şekilde yapılmasını gerektirmektedir. Yukarıda anlatılan sistemler laboratuar ortamında yalıtılmış ve steril bir ortam gerektirdiği halde, gemi ölçümlerinde bu şartları oluşturmak neredeyse imkansızdır. Tam ölçekli deney yapan araştırmacının (özellikle gemi şartlarında), bir çok mühendislik disiplini ile ilgilenmesi (mukavemet, elektrik, elektronik v.s.), gerekir. Bu duruma bir örnek; gemilerin elektrik sisteminde gerçek nötr ve toprak olmayabilir. Bazı gemilerde 220 voltluk potansiyel +110 ile -110 volt arasında sağlanmaktadır. Yukarıda belirtilen aletler bu durumda bozulup kullanılamaz hale gelebilmekteler. Gemi jeneratörleri seyirden kısa süre önce çalıştırıldığında bu durum fark edilirse ve araştırmacının bu durumda alacağı önlemler hakkında bir öngörüsü yok ise geminin o gün yapacağı seyir sırasında ölçüm yapmak imkansız hale gelmektedir. Böyle bir durumda maddi zarar çok yüksek olabilmektedir. 7. KAYNAKÇA [1] PERRY, C.C., LİSSNER, H.R., “The strain Gage Primer”, Second Edition, Mc Graw-Hill Book Company, New York.,1962 [2] Measuremets Group Vishay, Seminer Notları, Measurement Group Mebtechnik GmbH, 1993. [3] İNSEL, M, HELVACIOĞLU, İ.H., UNSAN, Y.,“Gemi Seyir Tecrübelerinde Şaft Gücü ve Titreşim Ölçümü”, Gemi ve Deniz Teknolojisi Dergisi, Cilt1, Sayı 6-29, T.M.M.O.B. Gemi Mühendisleri Odası, sf. 29 – 35.,1999. [4] VORUS W.S., “Principles of Naval Architecture” Vol II:Vibration, SNAME,1998. [5] İNSEL, M, “Gemi Seyir Tecrübelerinde Gemi Hızı-Makine Gücü İlişkisi, Gemi ve Deniz Teknolojisi Dergisi”, Cilt1, Sayı 160, T.M.M.O.B., Gemi Mühendisleri Odası, sf. 13 – 19.,2004. [6] ISO 15016, “Ships and Marine Technology- Guidelines for the assessment of speed and power performance by analysis of speed trial data”,2002.