
STABILNOST konstrukcija
23
Stabilnost konstrukcija 1 STABILNOST KONSTRUKCIJA STABILNOST KONSTRUKCIJA I. UVOD I. UVOD 1. 1. STABILNOST STABILNOST • Svojstvo konstrukcije da se odupre slučajnim djelovanjima i da samostalno uspostavi, potpuno ili djelomično, svoj položaj i oblik ravnoteže u deformiranom stanju, kada slučajna djelovanja iščeznu. • Stabilnost položaja konstrukcije i stabilnost oblika ravnoteže u deformiranom stanju: - stabilno stabilno (ako se pri svakom, proizvoljno malom, mogućem poremećaju ravnoteže i proizvoljno malim brzinama, pojave mala odstupanja ) - nestabilno nestabilno (ako pri ma kako proizvoljno malom mogućem poremećaju ravnoteže i pri ma kako malim početnim brzinama, dođe do odstupanja promatrane ravnoteže i umjesto težnje povratka u početno stanje dolazi ili do novog položaja ili do novog stanja ravnoteže u deformiranom stanju). • Gubitak stabilnosti Gubitak stabilnosti (prijelaz konstrukcije iz stabilnog u nestabilno stanje) • Kritično stanje Kritično stanje (granica prijelaza) • Kritično opterećenje Kritično opterećenje (opterećenje pri prijelazu).
-
Upload
irfan-hogic -
Category
Documents
-
view
204 -
download
8
description
Stabilnost konstrukcija
Transcript of STABILNOST konstrukcija
Stabilnost konstrukcija 1
STABILNOST KONSTRUKCIJASTABILNOST KONSTRUKCIJA
I. UVODI. UVOD
1.1. STABILNOSTSTABILNOST• Svojstvo konstrukcije da se odupre slučajnim djelovanjima i da
samostalno uspostavi, potpuno ili djelomično, svoj položaj i oblik ravnoteže u deformiranom stanju, kada slučajna djelovanja iščeznu.
• Stabilnost položaja konstrukcije i stabilnost oblika ravnoteže u deformiranom stanju:- stabilnostabilno (ako se pri svakom, proizvoljno malom, mogućem poremećaju ravnoteže i proizvoljno malim brzinama, pojave mala odstupanja )- nestabilnonestabilno (ako pri ma kako proizvoljno malom mogućem poremećaju ravnoteže i pri ma kako malim početnim brzinama, dođe do odstupanja promatrane ravnoteže i umjesto težnje povratka u početno stanje dolazi ili do novog položaja ili do novog stanja ravnoteže u deformiranom stanju).
•• Gubitak stabilnostiGubitak stabilnosti (prijelaz konstrukcije iz stabilnog u nestabilno stanje)
•• Kritično stanjeKritično stanje (granica prijelaza)•• Kritično opterećenjeKritično opterećenje (opterećenje pri prijelazu).
Stabilnost konstrukcija 2
2. GUBITAK STABILNOSTI2. GUBITAK STABILNOSTI
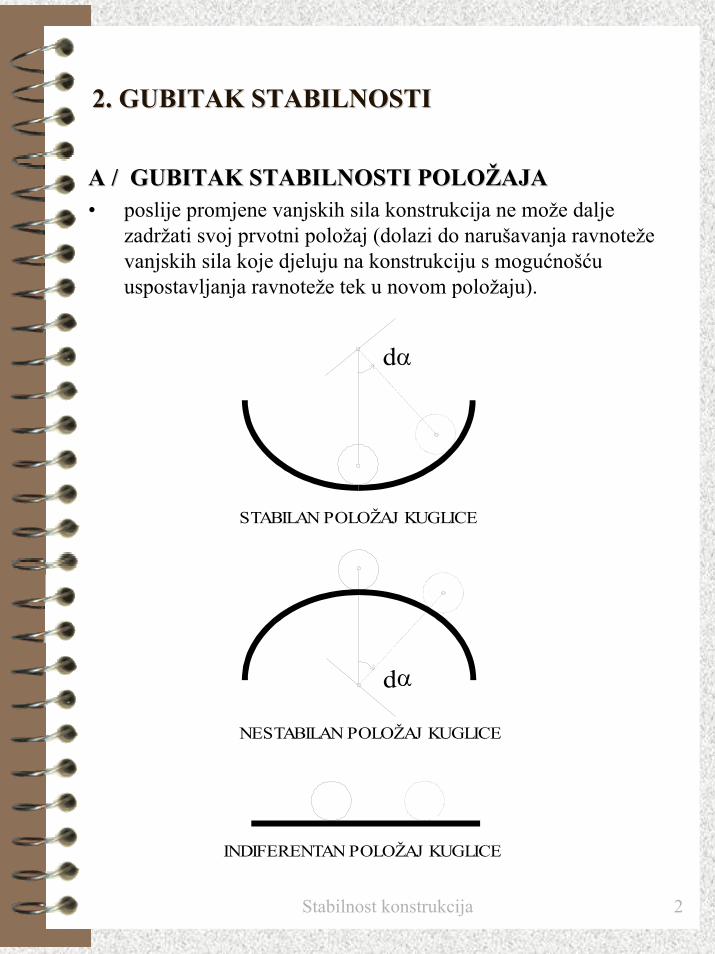
A / GUBITAK STABILNOSTI POLOŽAJAA / GUBITAK STABILNOSTI POLOŽAJA• poslije promjene vanjskih sila konstrukcija ne može dalje
zadržati svoj prvotni položaj (dolazi do narušavanja ravnoteže vanjskih sila koje djeluju na konstrukciju s mogućnošću uspostavljanja ravnoteže tek u novom položaju).
d
STABILAN POLOŽAJ KUGLICE
α
d
NESTABILAN POLOŽAJ KUGLICE
α
INDIFERENTAN POLOŽAJ KUGLICE
Stabilnost konstrukcija 3
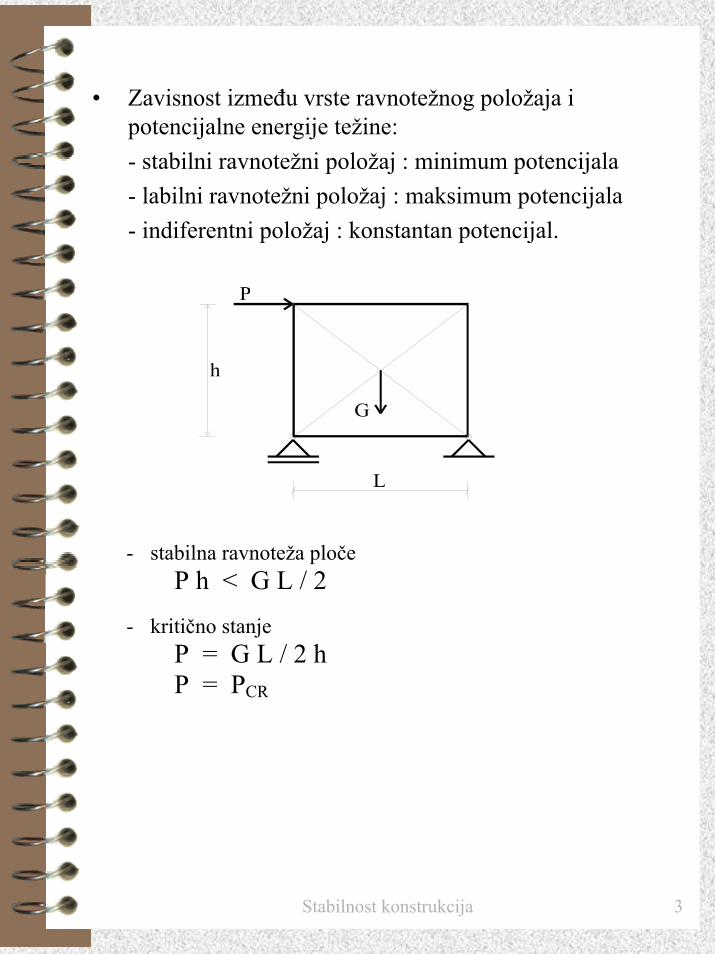
• Zavisnost između vrste ravnotežnog položaja i potencijalne energije težine:- stabilni ravnotežni položaj : minimum potencijala- labilni ravnotežni položaj : maksimum potencijala- indiferentni položaj : konstantan potencijal.
L
h
P
G
- stabilna ravnoteža pločeP h < G L / 2
- kritično stanjeP = G L / 2 hP = PCR
Stabilnost konstrukcija 4
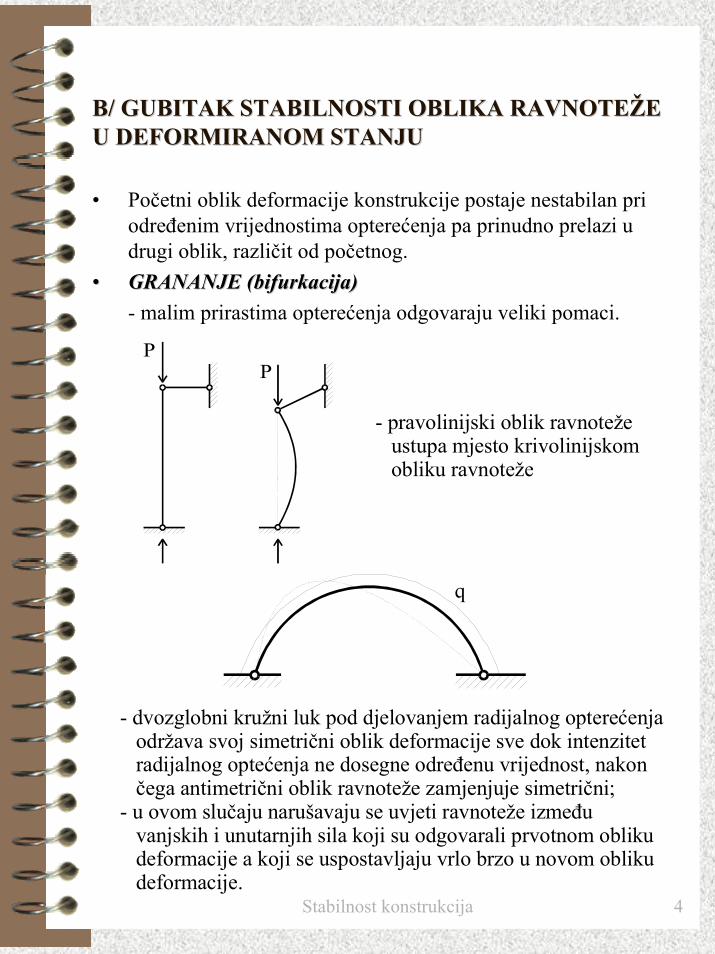
B/ GUBITAK STABILNOSTI OBLIKA RAVNOTEŽE B/ GUBITAK STABILNOSTI OBLIKA RAVNOTEŽE U DEFORMIRANOM STANJUU DEFORMIRANOM STANJU
• Početni oblik deformacije konstrukcije postaje nestabilan pri određenim vrijednostima opterećenja pa prinudno prelazi u drugi oblik, različit od početnog.
•• GRANANJE (GRANANJE (bifurkacijabifurkacija) ) - malim prirastima opterećenja odgovaraju veliki pomaci.
PP
- pravolinijski oblik ravnoteže ustupa mjesto krivolinijskom obliku ravnoteže
q
- dvozglobni kružni luk pod djelovanjem radijalnog opterećenja održava svoj simetrični oblik deformacije sve dok intenzitet radijalnog optećenja ne dosegne određenu vrijednost, nakon čega antimetrični oblik ravnoteže zamjenjuje simetrični;- u ovom slučaju narušavaju se uvjeti ravnoteže između vanjskih i unutarnjih sila koji su odgovarali prvotnom obliku deformacije a koji se uspostavljaju vrlo brzo u novom obliku deformacije.
Stabilnost konstrukcija 5
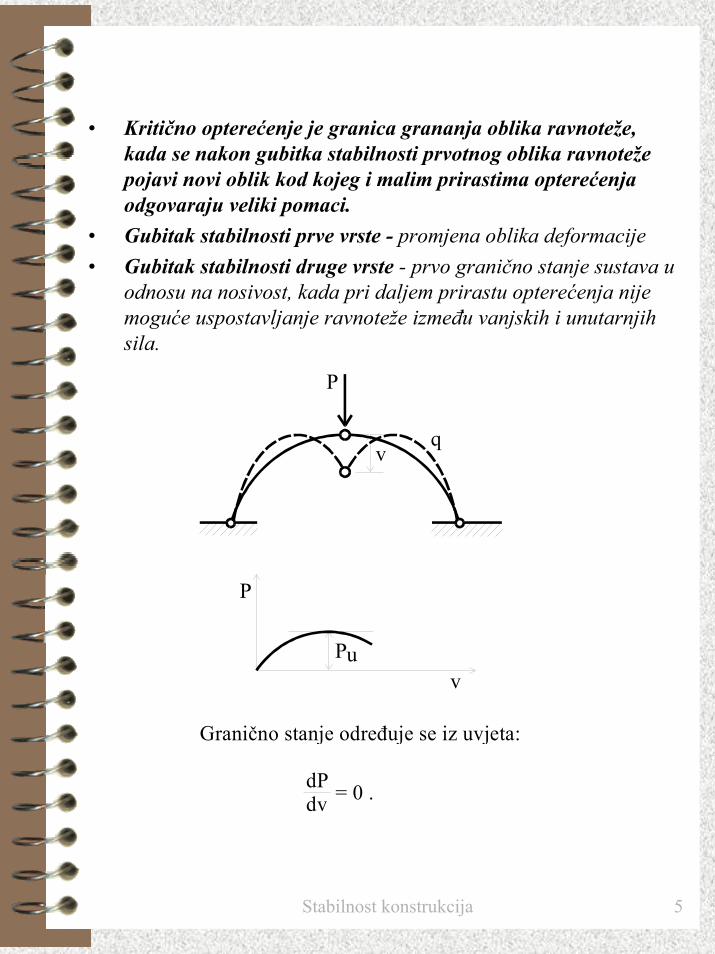
• Kritično opterećenje je granica grananja oblika ravnoteže, kada se nakon gubitka stabilnosti prvotnog oblika ravnoteže pojavi novi oblik kod kojeg i malim prirastima opterećenja odgovaraju veliki pomaci.
• Gubitak stabilnosti prve vrste - promjena oblika deformacije• Gubitak stabilnosti druge vrste - prvo granično stanje sustava u
odnosu na nosivost, kada pri daljem prirastu opterećenja nije moguće uspostavljanje ravnoteže između vanjskih i unutarnjih sila.
q
P
v
P
P
vu
Granično stanje određuje se iz uvjeta:
dP dv = 0 .
Stabilnost konstrukcija 6
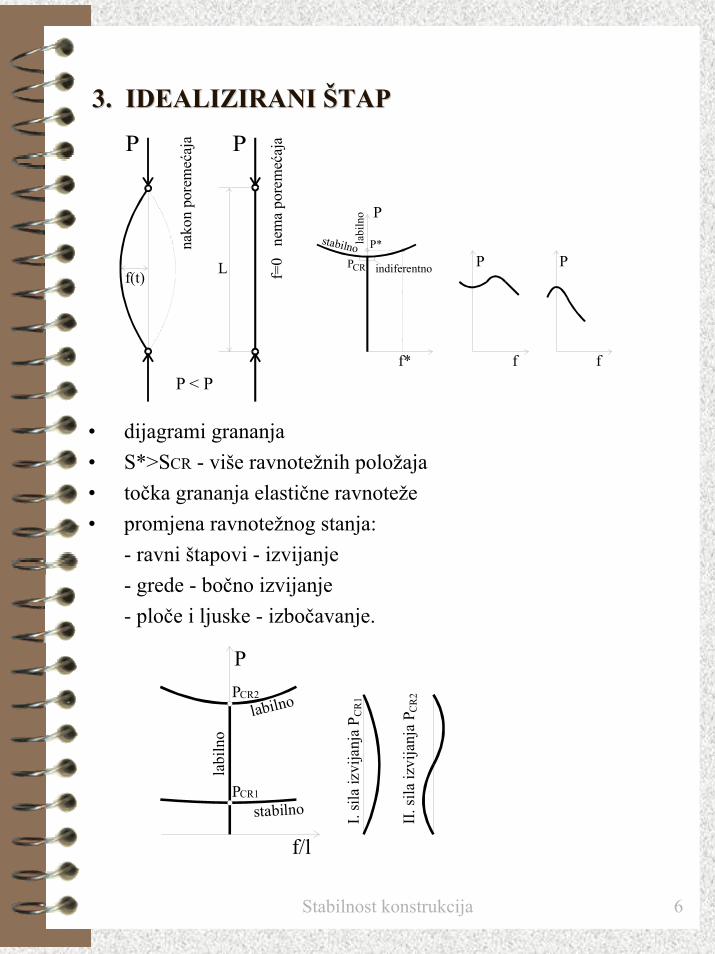
3. IDEALIZIRANI ŠTAP3. IDEALIZIRANI ŠTAP
P P
f(t)
nako
n po
rem
ećaj
a
f=0
nem
a po
rem
ećaj
a
P < P
CRL
P
P PP*
P
f* f fla
biln
o
stabilno
indiferentno
• dijagrami grananja• S*>SCR - više ravnotežnih položaja• točka grananja elastične ravnoteže• promjena ravnotežnog stanja:
- ravni štapovi - izvijanje- grede - bočno izvijanje- ploče i ljuske - izbočavanje.
CR1
CR2
P
P
P
f/l
labi
lno
I. si
la iz
vija
nja
P
II. si
la iz
vija
nja
Plabilno
stabilno
CR
1
CR
2
Stabilnost konstrukcija 7
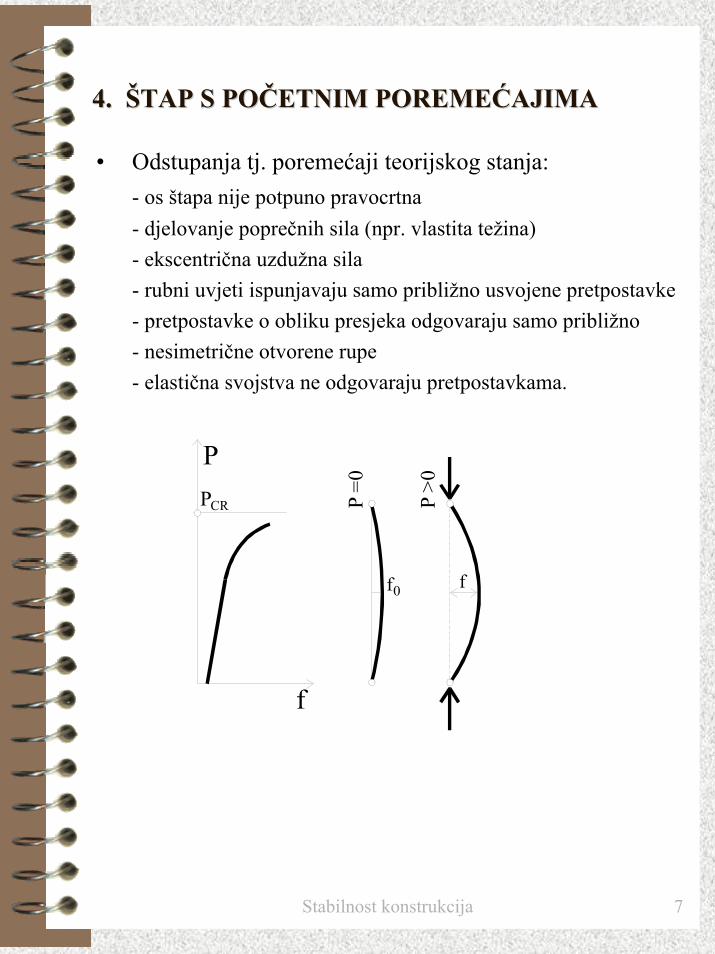
4. ŠTAP S POČETNIM POREMEĆAJIMA4. ŠTAP S POČETNIM POREMEĆAJIMA
• Odstupanja tj. poremećaji teorijskog stanja:- os štapa nije potpuno pravocrtna- djelovanje poprečnih sila (npr. vlastita težina)- ekscentrična uzdužna sila- rubni uvjeti ispunjavaju samo približno usvojene pretpostavke- pretpostavke o obliku presjeka odgovaraju samo približno- nesimetrične otvorene rupe- elastična svojstva ne odgovaraju pretpostavkama.
CR
PP
f
f f
P =0
P >0
0
Stabilnost konstrukcija 8
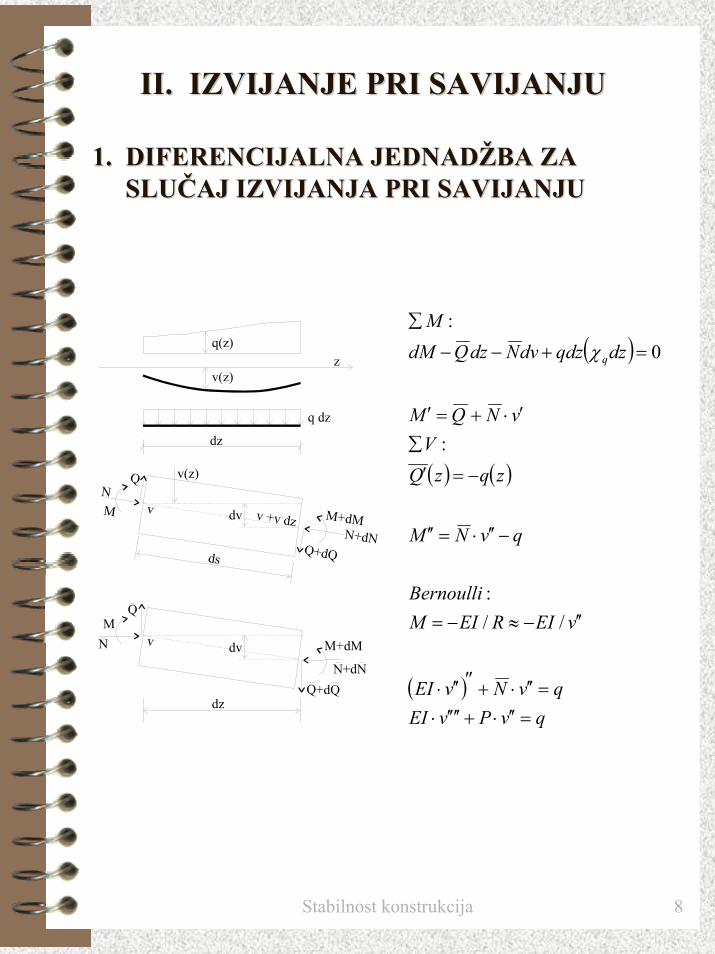
II. IZVIJANJE PRI SAVIJANJUII. IZVIJANJE PRI SAVIJANJU
1. DIFERENCIJALNA JEDNADŽBA ZA 1. DIFERENCIJALNA JEDNADŽBA ZA SLUČAJ IZVIJANJA PRI SAVIJANJUSLUČAJ IZVIJANJA PRI SAVIJANJU
( )
( ) ( )
( )qvPvEI
qvNvEI
vEIREIMBernoulli
qvNM
zqzQV
vNQM
dzqdzdvNdzQdMM
q
=′′⋅+′′′′⋅=′′⋅+″′′⋅
′′−≈−=
−′′⋅=′′
−=′
∑
′⋅+=′
=+−−
∑
//:
:
0:
χq(z)
v(z)z
dz
ds
dz
Q
Q
Q+dQ
Q+dQ
N
N
N+dN
N+dN
M
M
M+dM
M+dM
v(z)
v
v
v +v dzdv
dv
q dz
Stabilnost konstrukcija 9
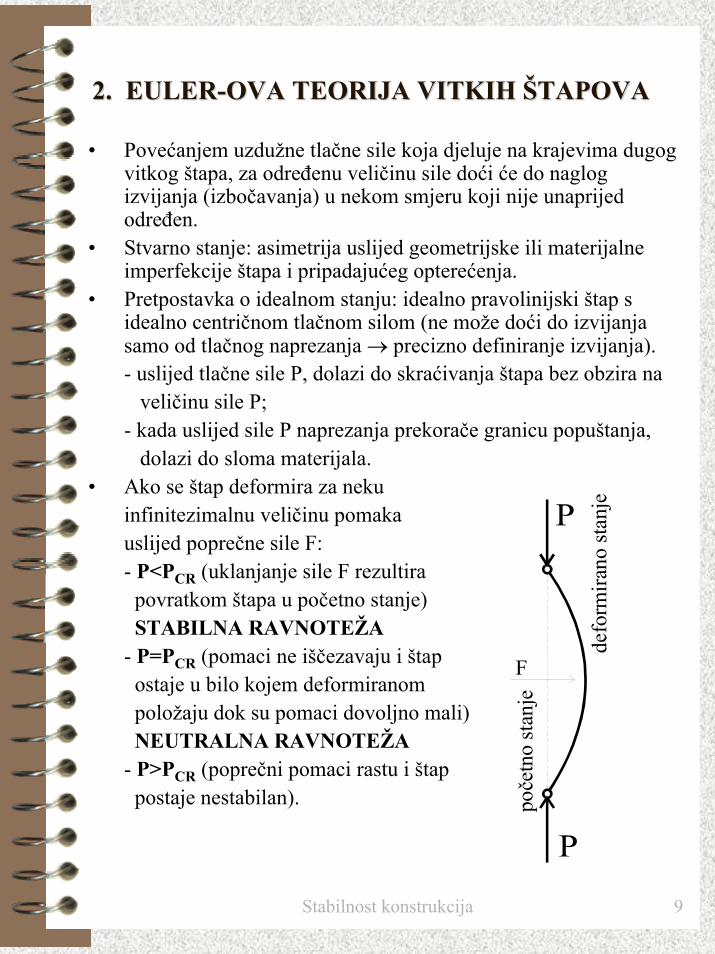
2. EULER2. EULER--OVA TEORIJA VITKIH ŠTAPOVAOVA TEORIJA VITKIH ŠTAPOVA
• Povećanjem uzdužne tlačne sile koja djeluje na krajevima dugog vitkog štapa, za određenu veličinu sile doći će do naglog izvijanja (izbočavanja) u nekom smjeru koji nije unaprijed određen.
• Stvarno stanje: asimetrija uslijed geometrijske ili materijalne imperfekcije štapa i pripadajućeg opterećenja.
• Pretpostavka o idealnom stanju: idealno pravolinijski štap s idealno centričnom tlačnom silom (ne može doći do izvijanja samo od tlačnog naprezanja → precizno definiranje izvijanja).- uslijed tlačne sile P, dolazi do skraćivanja štapa bez obzira na
veličinu sile P;- kada uslijed sile P naprezanja prekorače granicu popuštanja,
dolazi do sloma materijala.• Ako se štap deformira za neku
infinitezimalnu veličinu pomakauslijed poprečne sile F:- P<PCR (uklanjanje sile F rezultira
povratkom štapa u početno stanje) STABILNA RAVNOTEŽA
- P=PCR (pomaci ne iščezavaju i štap ostaje u bilo kojem deformiranom položaju dok su pomaci dovoljno mali)NEUTRALNA RAVNOTEŽA
- P>PCR (poprečni pomaci rastu i štappostaje nestabilan).
P
P
F
poče
tno
stan
je
defo
rmira
no st
anje

Stabilnost konstrukcija 10
A) IZVIJANJE ZGLOBNO OSLONJENOG ŠTAPA
2
22
2
21
2
2
2
2
...3,2,1 ,0sin
0)( ,0)0( :
sincos:..
0
LEInP
nnLL
LzvzvuvjetirubniEIP
zCzCvjeddifrješenje
vEIP
dzvd
vEIP
EIM
dzvd
vPM
CR
CR
CR
CR
CR
π
παα
α
αα
=
===
====
=
+=
=+
−=−=
=
P
EI
L
P
v
y
z
CR
CR
Minimalna kritična sila : za n=1.Viši oblici izvijanja mogu nastati uz poprečno pridržanje utočkama infleksije.
L
L L
LL
L2 3
23
3
2
2
LEIPCR
π= 2
24L
EIPCRπ
= 2
29L
EIPCRπ
=
Stabilnost konstrukcija 11
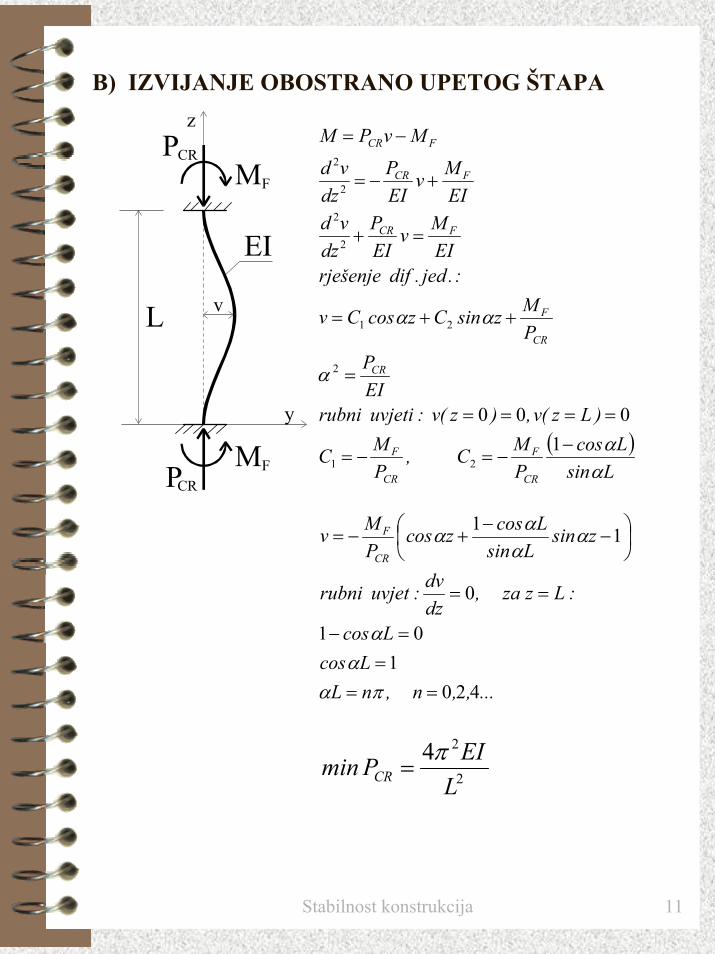
B) IZVIJANJE OBOSTRANO UPETOG ŠTAPA
PM
M
EI
L
P
v
y
z
CR
F
FCR
( )Lsin
LcosPMC,
PMC
)Lz(v,)z(v:uvjetirubniEIP
PMzsinCzcosCv
:.jed.difrješenjeEIMv
EIP
dzvd
EIMv
EIP
dzvd
MvPM
CR
F
CR
F
CR
CR
F
FCR
FCR
FCR
αα
α
αα
−−=−=
====
=
++=
=+
+−=
−=
1
0 00
21
2
21
2
2
2
2
...,,n,nLLcos
Lcos
:Lzza,dzdv:uvjetrubni
zsinLsin
LcoszcosPMv
CR
F
420 1
01
0
11
===
=−
==
−
−+−=
παα
α
αααα
2
24L
EIPmin CRπ
=
Stabilnost konstrukcija 12
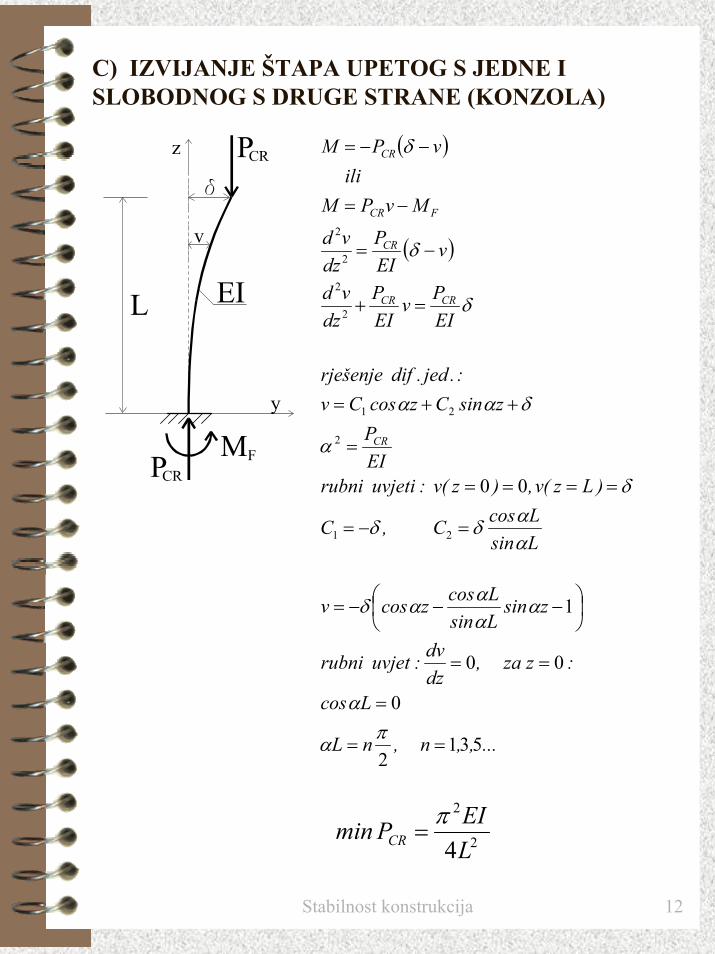
C) IZVIJANJE ŠTAPA UPETOG S JEDNE I SLOBODNOG S DRUGE STRANE (KONZOLA)
( )
( )
LsinLcosC,C
)Lz(v,)z(v:uvjetirubniEIP
zsinCzcosCv:.jed.difrješenje
EIPv
EIP
dzvd
vEIP
dzvd
MvPMili
vPM
CR
CRCR
CR
FCR
CR
ααδδ
δ
α
δαα
δ
δ
δ
=−=
====
=
++=
=+
−=
−=
−−=
21
2
21
2
2
2
2
00
M
EIL
P
P
v
d
y
z
FCR
CR
...,,n,nL
Lcos
:zza,dzdv:uvjetrubni
zsinLsinLcoszcosv
531 2
0
0 0
1
==
=
==
−−−=
πα
α
ααααδ
2
2
4LEIPmin CR
π=
Stabilnost konstrukcija 13
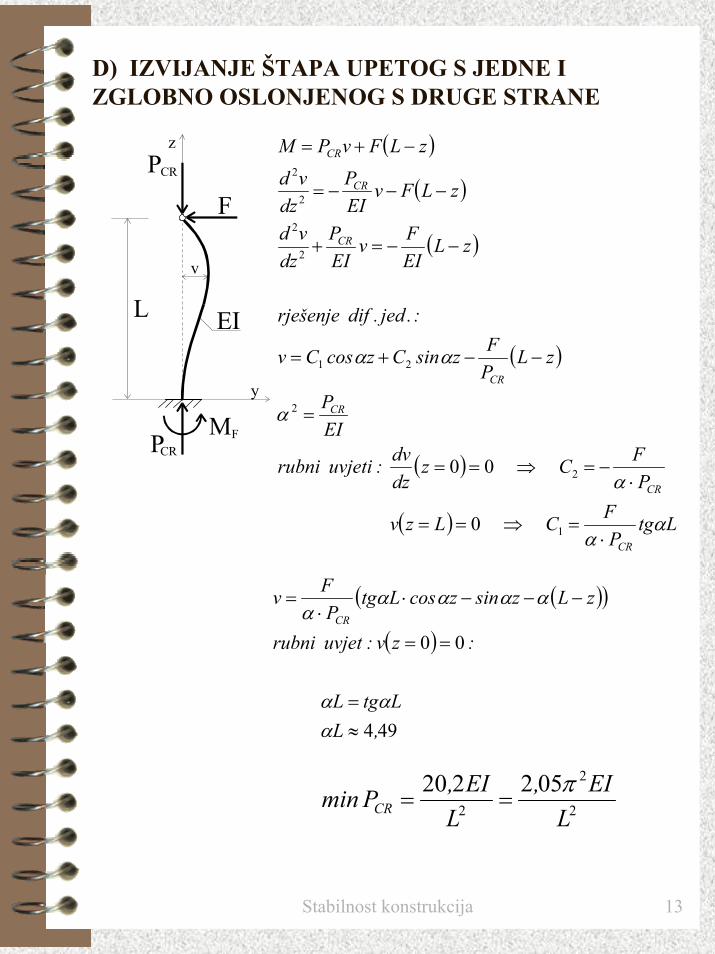
D) IZVIJANJE ŠTAPA UPETOG S JEDNE I ZGLOBNO OSLONJENOG S DRUGE STRANE
( )
( )
( )
( )
( )
( ) LtgP
FCLzv
PFCz
dzdv:uvjetirubni
EIP
zLPFzsinCzcosCv
:.jed.difrješenje
zLEIFv
EIP
dzvd
zLFvEIP
dzvd
zLFvPM
CR
CR
CR
CR
CR
CR
CR
αα
α
α
αα
⋅=⇒==
⋅−=⇒==
=
−−+=
−−=+
−−−=
−+=
1
2
2
21
2
2
2
2
0
00
P
F
M
EIL
P
v
y
z
CR
FCR
( )( )
( )
494
00
,LLtgL
:zv:uvjetrubni
zLzsinzcosLtgP
FvCR
≈=
==
−−−⋅⋅
=
ααα
ααααα
2
2
2
052220L
EI,L
EI,Pmin CRπ
==
Stabilnost konstrukcija 14
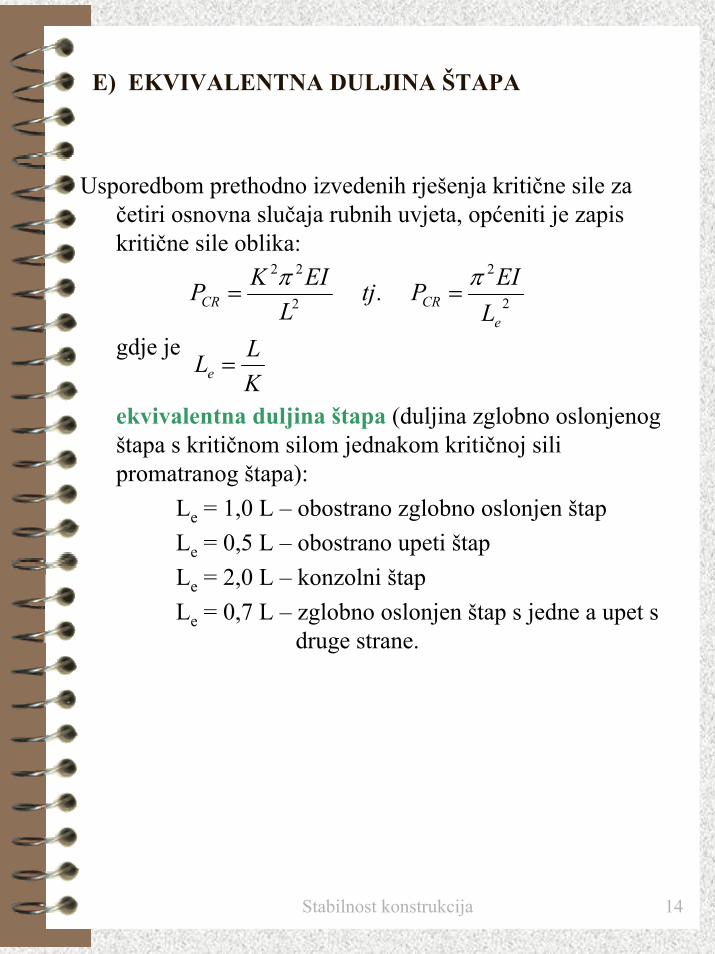
E) EKVIVALENTNA DULJINA ŠTAPA
Usporedbom prethodno izvedenih rješenja kritične sile za četiri osnovna slučaja rubnih uvjeta, općeniti je zapis kritične sile oblika:
gdje je
ekvivalentna duljina štapa (duljina zglobno oslonjenog štapa s kritičnom silom jednakom kritičnoj sili promatranog štapa):
Le = 1,0 L – obostrano zglobno oslonjen štapLe = 0,5 L – obostrano upeti štapLe = 2,0 L – konzolni štapLe = 0,7 L – zglobno oslonjen štap s jedne a upet s
druge strane.
2
2
2
22
e
CRCR LEIP.tj
LEIKP ππ
==
KLLe =
Stabilnost konstrukcija 15
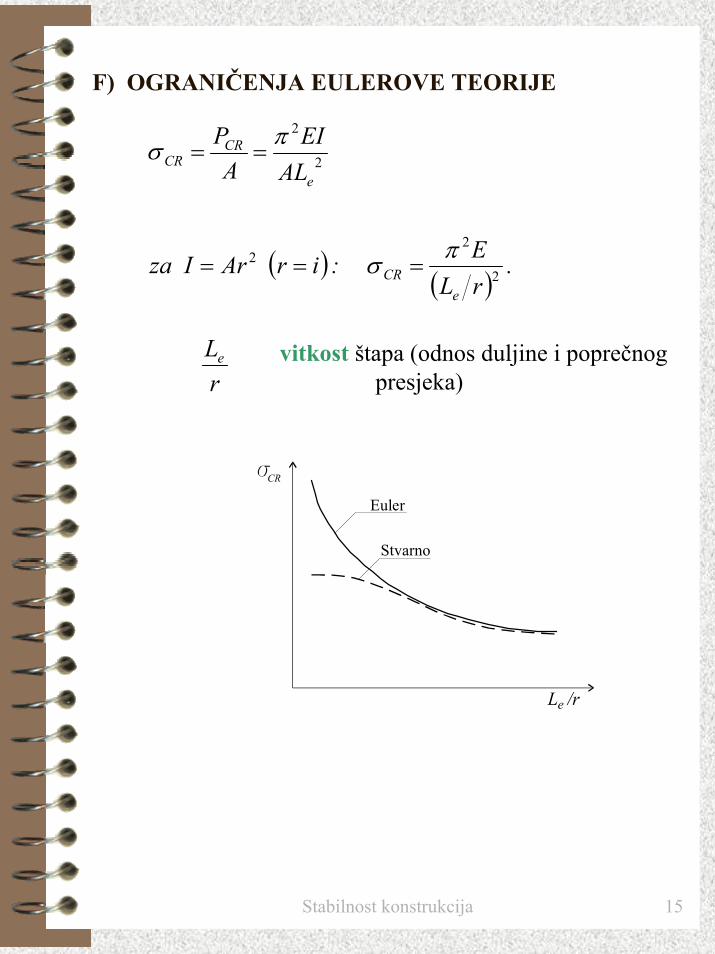
F) OGRANIČENJA EULEROVE TEORIJE
( )( )
.rLE:irArIza
ALEI
AP
eCR
e
CRCR
2
22
2
2
πσ
πσ
===
==
vitkost štapa (odnos duljine i poprečnog presjeka)
rLe
Stvarno
Euler
s
L /r
CR
e
Stabilnost konstrukcija 16
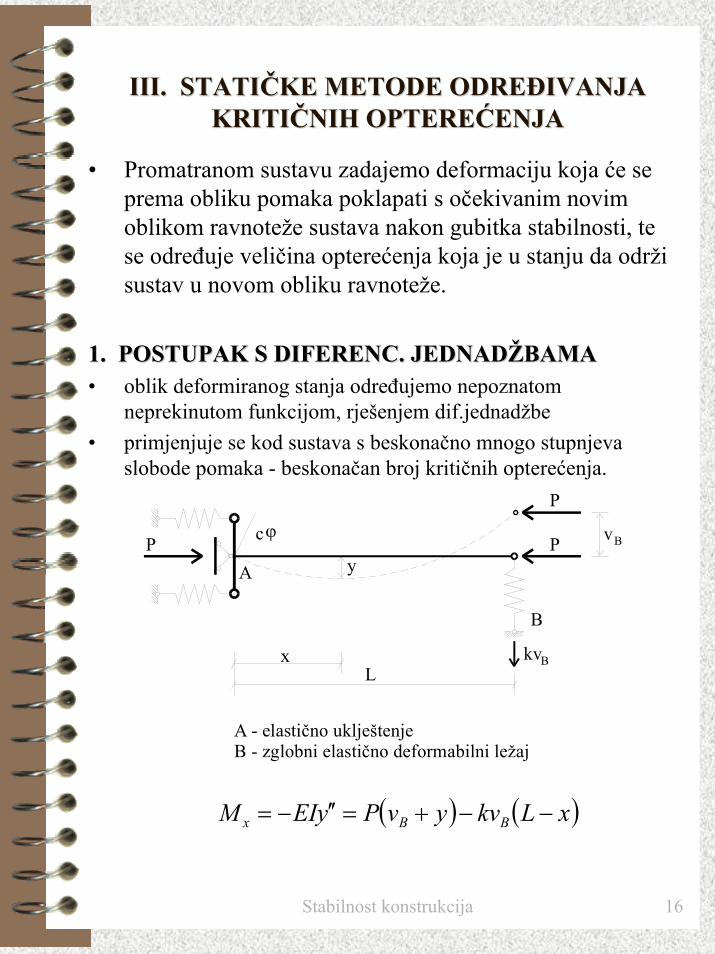
III. STATIČKE METODE ODREĐIVANJA III. STATIČKE METODE ODREĐIVANJA KRITIČNIH OPTEREĆENJAKRITIČNIH OPTEREĆENJA
• Promatranom sustavu zadajemo deformaciju koja će se prema obliku pomaka poklapati s očekivanim novim oblikom ravnoteže sustava nakon gubitka stabilnosti, tese određuje veličina opterećenja koja je u stanju da održi sustav u novom obliku ravnoteže.
1. POSTUPAK S DIFERENC. JEDNADŽBAMA1. POSTUPAK S DIFERENC. JEDNADŽBAMA• oblik deformiranog stanja određujemo nepoznatom
neprekinutom funkcijom, rješenjem dif.jednadžbe• primjenjuje se kod sustava s beskonačno mnogo stupnjeva
slobode pomaka - beskonačan broj kritičnih opterećenja.
P
P
Pcϕ
A y
xL
kv
v
B
B
B
A - elastično uklještenjeB - zglobni elastično deformabilni ležaj
( ) ( )xLkvyvPyEIM BBx −−+=′′−=
Stabilnost konstrukcija 17
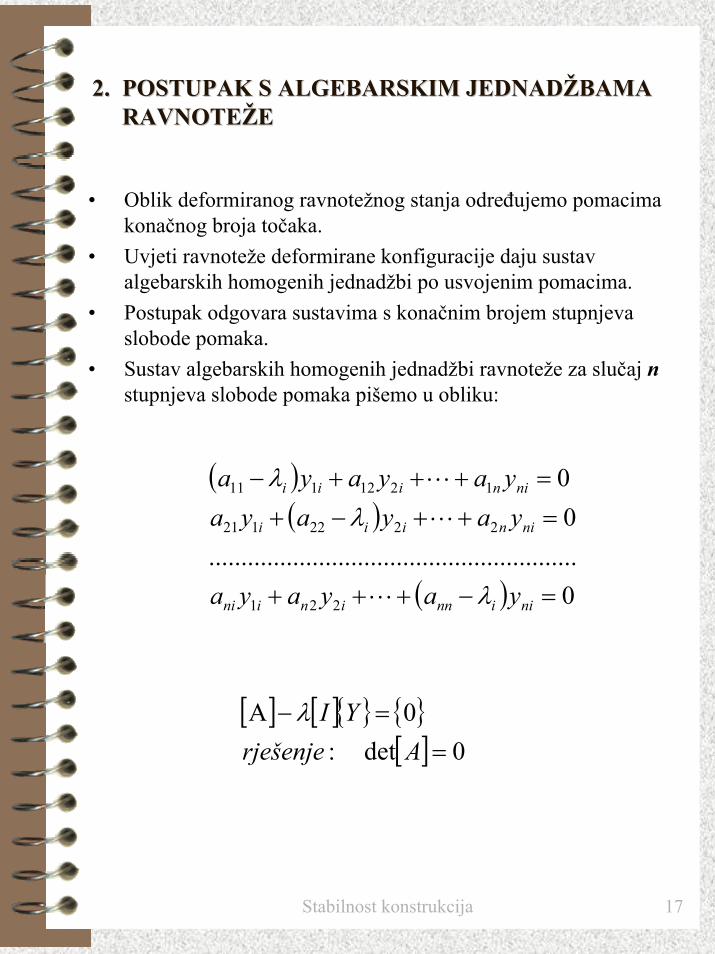
2. POSTUPAK S ALGEBARSKIM JEDNADŽBAMA 2. POSTUPAK S ALGEBARSKIM JEDNADŽBAMA RAVNOTEŽERAVNOTEŽE
• Oblik deformiranog ravnotežnog stanja određujemo pomacima konačnog broja točaka.
• Uvjeti ravnoteže deformirane konfiguracije daju sustav algebarskih homogenih jednadžbi po usvojenim pomacima.
• Postupak odgovara sustavima s konačnim brojem stupnjeva slobode pomaka.
• Sustav algebarskih homogenih jednadžbi ravnoteže za slučaj nstupnjeva slobode pomaka pišemo u obliku:
( )( )
( )
[ ] [ ]{ } { }[ ] 0det : 0A
0.........................................................
00
221
2222121
1212111
==−
=−+⋅⋅⋅++
=+⋅⋅⋅+−+=+⋅⋅⋅++−
ArješenjeYI
yayaya
yayayayayaya
niinninini
niniii
niniii
λ
λ
λλ
Stabilnost konstrukcija 18
IV. ENERGETSKE METODE ODREĐIVANJA IV. ENERGETSKE METODE ODREĐIVANJA KRITIČNIH OPTEREĆENJAKRITIČNIH OPTEREĆENJA
• Zasnivaju se na analizi izraza za punu potencijalnu energiju deformacije sustava u stanju pomaka.
• Stanje pomaka biramo tako da se poklapa s očekivanim oblikom deformacije sustava, nakon gubitka stabilnosti.
• Nakon izvođenja sustava iz prvotnog stanja deformacije u njemu blisko pomaknuto stanje, određujemo rad vanjskih sila Av kojeg izjednačujemo s prirastom potencijalne energije sustava V, odnosno s negativnom vrijednošću rada unutarnjih sila Au:
Av = V = - Au.• Uslijed unošenja dopunskih veza - približni postupak.
1. TIMOSHENKOV ENERGETSKI POSTUPAK• P = f (x1, x2, x3, … , xn )
2. DINAMIČKA METODA• uvjet minimuma potencijalne energije:
CRi
PnixP
⇒==∂∂ ),...,2,1( ,0
.0=∂∂
ixV
Stabilnost konstrukcija 19
3. RAYLEIGH - EV KVOCIJENT
• Potencijalna energija deformiranog stanja :
• Rad vanjskih sila :
• Av = V :
• Ako pretpostavimo da je M = Py, dobiva se Timoshenkov izraz:
∫ ′′=l
dxyEIV0
2
21
∫ ′=l
v dxyPA0
2
2
∫
∫
′
′′= l
l
CR
dxy
dxyEIP
0
2
0
2
∫
∫ ′= l
l
CR
dxEIy
dxyP
0
20
2

Stabilnost konstrukcija 20
4. METODA BUBNOV - GALERKIN
• Primjena : kod sustava gdje je M = - Py, te za nosače s promjenjivim presjekom
5. RITZOVA METODA• temelji se na Rayleigh-evom i Timoshenko-vom izrazu
[ ]
( )
∫
∫
∫
∑
⋅
⋅″
−=
=⋅+′′
=
l
ji
l
ji
CR
l
jx
ii
dx
dxxEIP
PyyEI
cy
0
0
0
0
ϕϕ
ϕϕ
ϕ
ϕ
( )
( ) [ ])( ,...,2,1 ,
1
)( ,...,2,1 ,
0
0
0
0
Timoshenkonjdxa
xEI
dxaP
Rayleighnjdxa
dxaxEIP
ay
l
jii
l
jii
CR
l
jii
j
l
ii
CR
ii
=⋅
′⋅
′
=
=′⋅
′
″⋅
″⋅
=
=
∫ ∑
∫ ∑
∫ ∑
∫ ∑
∑
ϕϕ
ϕϕ
ϕϕ
ϕϕ
ϕ
[ ]{ } { } [ ] CRPAaA ⇒== 0det 0
Stabilnost konstrukcija 21
V. RJEŠENJE LINEARNE HOMOGENE V. RJEŠENJE LINEARNE HOMOGENE DIFERENCIJALNE JED. IV. REDADIFERENCIJALNE JED. IV. REDA
EIPyy
yPEIy
IV
IV
==′′+
=′′+
22 ,0
0
αα
( )( )( )( )( ) yxBxAxy
xBxAxyxBxAxy
CxBxAxyDCxxBxAxy
IV ′′−=+=
+−=′′′
−−=′′
+−=′+++=
244
33
22
cossinsincoscossin
sincoscossin
ααααα
αααα
αααα
αααααα
• geometrijski ili kinematski rubni uvjeti :
• dinamički rubni uvjeti (rubni uvjeti sila) :
......=′=
yy
( )yyEITyPyEITyEIM
′+′′′−=⇒′−′′′−=
′′−=2 α

Stabilnost konstrukcija 22
VI. METODA POČETNIH VI. METODA POČETNIH PARAMETARAPARAMETARA
• Temelji se na određivanju konstanti u rješenju linearne homogene diferencijalne jednadžbe IV. reda, za x=0.
( )
( ) ( ) ( )
( ) ( )
( ) ( )
( ) ( )____________________________
sincossin
cos1sincos
sincos1sin
____________________________
, , ,
____________________________
02
000
200
0
30
200
0
300
20
020
20
20
200
200
0
0
TyyEIxT
xTxMxyEIxyEIxM
xEI
TxEI
Mxyxy
xxEI
TxEI
Mxyyxy
EITyA
EIMyD
EITC
EIMB
CEIyyEITT
BEIyEIMM
CAyyDByy
=′+′′′−=
++′=′′−=
−−−′=′
−−−−′
+=
+′
=−=−==
−=′+′′′−==
=′′−==
+=′=′+==
α
αα
ααα
αα
αα
α
ααα
αα
αα
ααααα
αα
α
α
P P
P PM EI EI
T y
M
∆ ∆
∆1
1 2
2
α α
Primjena :
Stabilnost konstrukcija 23
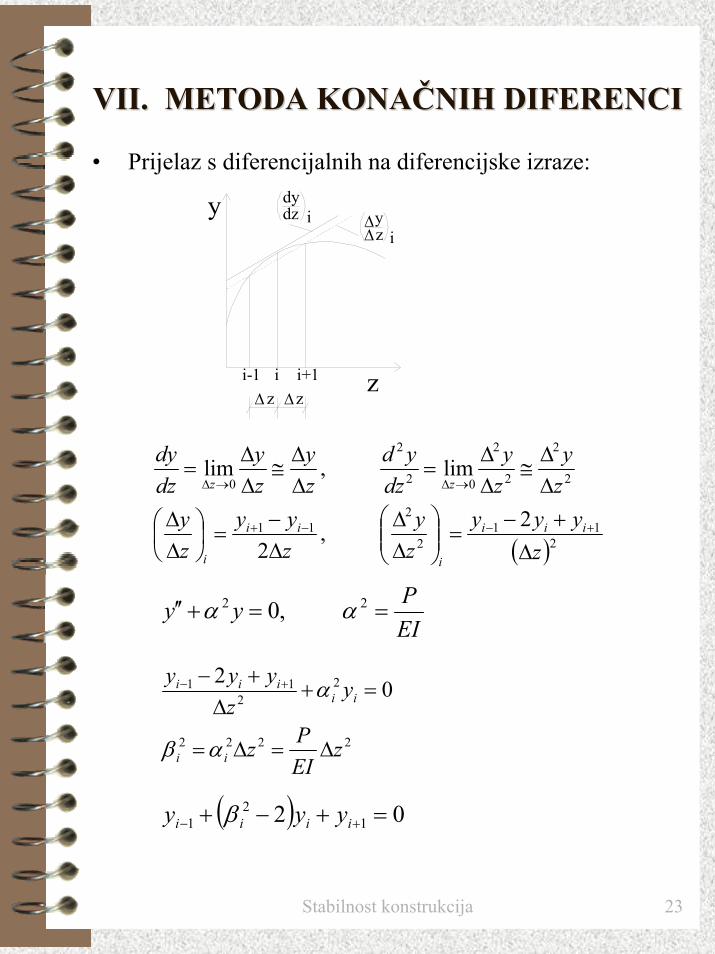
VII. METODA KONAČNIH DIFERENCIVII. METODA KONAČNIH DIFERENCI
• Prijelaz s diferencijalnih na diferencijske izraze:dy
ydz z
y
z
ii
∆ ∆
∆∆
i-1 i i+1z z
( )211
2
211
2
2
2
2
02
2
0
2 ,2
lim ,lim
zyyy
zy
zyy
zy
zy
zy
dzyd
zy
zy
dzdy
iii
i
ii
i
zz
∆+−
=
∆∆
∆−
=
∆∆
∆∆
≅∆∆
=∆∆
≅∆∆
=
+−−+
→∆→∆
EIPyy ==+′′ 22 ,0 αα
2222
22
11 02
zEIPz
yz
yyy
ii
iiiii
∆=∆=
=+∆
+− +−
αβ
α
( ) 02 12
1 =+−+ +− iiii yyy β


















