
Signali i sustavi - sis.zesoi.fer.hrsis.zesoi.fer.hr/predavanja/pdf/sis_2001_ho07.pdf · Kaskadni...
29
1 Signali Signali i sustavi sustavi Linearni diferencijalni sustavi 2 Sadržaj Sadržaj I Model sustava s ulazno izlaznim varijablama Klasične metode rješavanja Vremenski stalni sustavi Amplitude vlastitog titranja sustava Prisilni odziv sustava Transfer funkcija lin. vremenski invarijantnog sustava dobivena Laplaceovom transformacijom 3 Sadr Sadr žaj žaj II II Transfer funkcije složenih sustava Paralelni spoj podsustava Kaskadni spoj podsustava Prstenasti spoj podsustava Ulazno izlazni model sustava s više ulaza i izlaza Model s varijablama stanja Blok dijagram linearnog sustava Razlaganje sustava i prijelaz u model s varijablama stanja Direktna, iterativna i paralelna metoda
Transcript of Signali i sustavi - sis.zesoi.fer.hrsis.zesoi.fer.hr/predavanja/pdf/sis_2001_ho07.pdf · Kaskadni...
1
SignaliSignali ii sustavisustavi
Linearni diferencijalni sustavi
2
SadržajSadržaj IIModel sustava s ulazno izlaznim varijablamaKlasične metode rješavanjaVremenski stalni sustaviAmplitude vlastitog titranja sustavaPrisilni odziv sustavaTransfer funkcija lin. vremenski invarijantnog sustava dobivena Laplaceovom transformacijom
3
SadrSadržajžaj IIIITransfer funkcije složenih sustava
Paralelni spoj podsustavaKaskadni spoj podsustavaPrstenasti spoj podsustava
Ulazno izlazni model sustava s više ulaza i izlazaModel s varijablama stanja
Blok dijagram linearnog sustava
Razlaganje sustava i prijelaz u model svarijablama stanja
Direktna, iterativna i paralelna metoda
2
4
SadrSadržajžaj IIIIII
Transformacija varijabli stanjaUpravljivost i osmotrivost
5
ModelModel sustavasustava ss ulazno izlaznim ulazno izlaznim varijablamavarijablama
Diferencijalni sustavi su oni koji se daju opisati jednom ili više diferencijalnih jednadžbi.Linearni sustav s jednim ulazom i jednim izlazom:
.bbb
)(aaa
0)1(
1)(
0)1(
1)(
uuu
tfyyym
mm
m
nn
nn
+++=
==+++−
−
−−
K
K
Desna strana od f(t) − funkcija smetnje ili funkcija pobude, općenito funkcija ulaznog signala u(t) i njegovih derivacija do m − tog reda, m ≤ n.
6
ModelModel sustavasustava ss ulazno izlaznim ulazno izlaznim varijablamavarijablama
Koeficijenti {ai} i {bi}:konstantni ⇒ vremenski stalan linearni sustav,funkcija vremena ⇒ vremenski promjenjiv linearni sustav,zavise od ulaznih ili izlaznih varijabli i njihovih derivacija ⇒nelinearni sustav.
Sustav je općenito opisan s više simultanih diferencijalnih jednadžbi.Često se više simultanih diferencijalnih jednadžbi svodi na jednu jednadžbu višeg reda koja veže jednu izlaznu i jednu ulaznu varijablu.
3
7
ModelModel sustavasustava ss ulazno izlaznim ulazno izlaznim varijablamavarijablama
Svojstva operatora deriviranja:
Diferencijalna jednadžba napisana pomoću operatora D
( ) ( ) .bDbaDa 00 uy mm
nn ++=++ KK
( ) ( )( )
( )( ) ( )[ ] .CCDCCDCDCD
DCDCC CDDDDDD
21212
21
22112211
yy
yyyyyyy
nnn
mnnmmn
+++=++
+=+
== +
8
ModelModel sustavasustava ss ulazno izlaznim ulazno izlaznim varijablamavarijablama
Skraćeni oblik zapisa:
Predstavljanje linearnog sustava pomoću operatora H(D), gdje je H(D) = B(D) / A(D)
.D ,Dsugdje)D()D( n
nn
dtydy
dtdyyuByA ≡≡=
y u H(D)
9
Klasične metode rješavanjaKlasične metode rješavanjaAko postoji funkcija smetnje ili pobude f(t),linearna diferencijalna jednadžba je nehomogena.Jednadžba postaje homogena za f(t) = 0:
0.=a +...+a 0 ydt
ydn
n
n
Homogena jednadžba n − tog reda ima nlinearno nezavisnih rješenja, pa se opće rješenje može prikazati kao linearna kombinacija pojedinačnih rješenja.
nn yyyy K...K+K= 22110 ++
4
10
Klasične metode rješavanjaKlasične metode rješavanja
Pretpostavlja se rješenje oblika: y(t) = ept, p∈C.Supstitucijom se dobije izraz:
.0)aaaa( 01)1(
1 =++++ −−
ptnn
nn eppp K
Karakteristična jednadžba gornje diferencijalne jednadžbe
.0aaaa 01)1(
1 =++++ −− ppp n
nn
n K
Opće rješenje uz n različitih karakterističnih korjena
.KKKK)(1
ppp2
p10
21 ∑=
=+++=n
i
ti
tn
tt in eeeety K
11
Vremenski stalni sustaviVremenski stalni sustavi
Opće rješenje uz k jednakih od ukupno nkorjena
.KK
KKK)(pp
1
p1p2
p10
1
111
tn
tk
tkk
tt
nk ee
etteety
+++
+++=+
+
−
K
K
Opće rješenje uz korjene višestrukosti m1, m2, ..., mn .K)(
1
1'
1
p0 ∑∑
=
−
=
=i
i
m
j
jij
n
i
t tety
.+= p0 yyy
Rješenje nehomogene jednadžbe dobiva sedodavanjem tzv. partikularnog rješenja yp na rješenje homogene
12
Vremenski stalni sustaviVremenski stalni sustaviRješenje homogene jednadžbe −komplementarno rješenje ili slobodni odziv sustava,
postoji i kada nema pobude za Ki ≠ 0,naziva se i vlastito gibanje ili titranje sustava jer opisuje titranje energije u sustavu bez vanjskog poticaja.Komponente slobodnog odziva titraju isključivo karakterističnim frekvencijama sustava pi, koje zavise od strukture i parametara sustava, a ne od pobude.Komplementarno rješenje prisutno je u općem rješenju nehomogene jednadžbe.
5
13
AmplitudeAmplitude vlastitog titranja vlastitog titranja sustavasustava
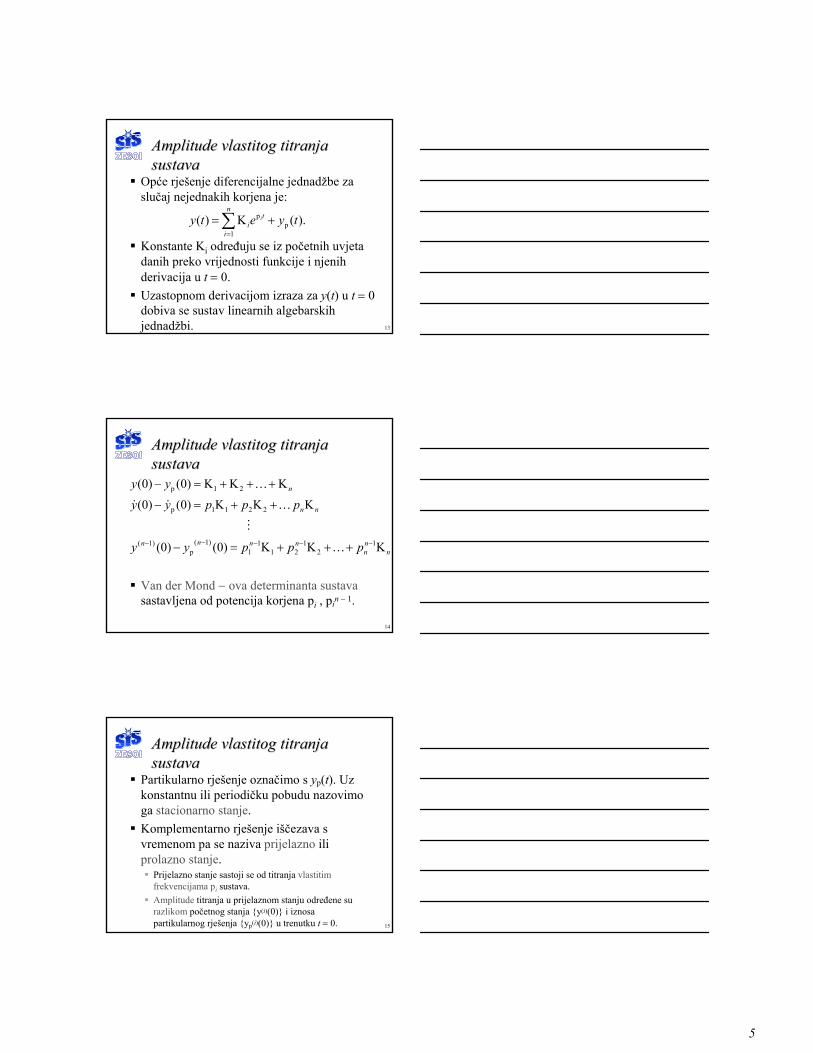
Opće rješenje diferencijalne jednadžbe za slučaj nejednakih korjena je:
).(K)( p1
p tyetyn
i
ti
i += ∑=
Konstante Ki određuju se iz početnih uvjeta danih preko vrijednosti funkcije i njenih derivacija u t = 0.Uzastopnom derivacijom izraza za y(t) u t = 0dobiva se sustav linearnih algebarskih jednadžbi.
14
AmplitudeAmplitude vlastitog titranja vlastitog titranja sustavasustava
nnn
nnnn
nn
n
pppyy
pppyy
yy
KKK)0()0(
KKK)0()0(
KKK)0()0(
12
121
11
)1(p
)1(
2211p
21p
−−−−− +++=−
++=−
+++=−
K
M
K&&
K
Van der Mond − ova determinanta sustava sastavljena od potencija korjena pi , pin − 1.
15
AmplitudeAmplitude vlastitog titranja vlastitog titranja sustavasustava
Partikularno rješenje označimo s yp(t). Uz konstantnu ili periodičku pobudu nazovimo ga stacionarno stanje.Komplementarno rješenje iščezava svremenom pa se naziva prijelazno iliprolazno stanje.
Prijelazno stanje sastoji se od titranja vlastitim frekvencijama pi sustava.Amplitude titranja u prijelaznom stanju određene su razlikom početnog stanja {y(i)(0)} i iznosa partikularnog rješenja {yp(i)(0)} u trenutku t = 0.
6
16
AmplitudeAmplitude vlastitog titranja vlastitog titranja sustavasustava
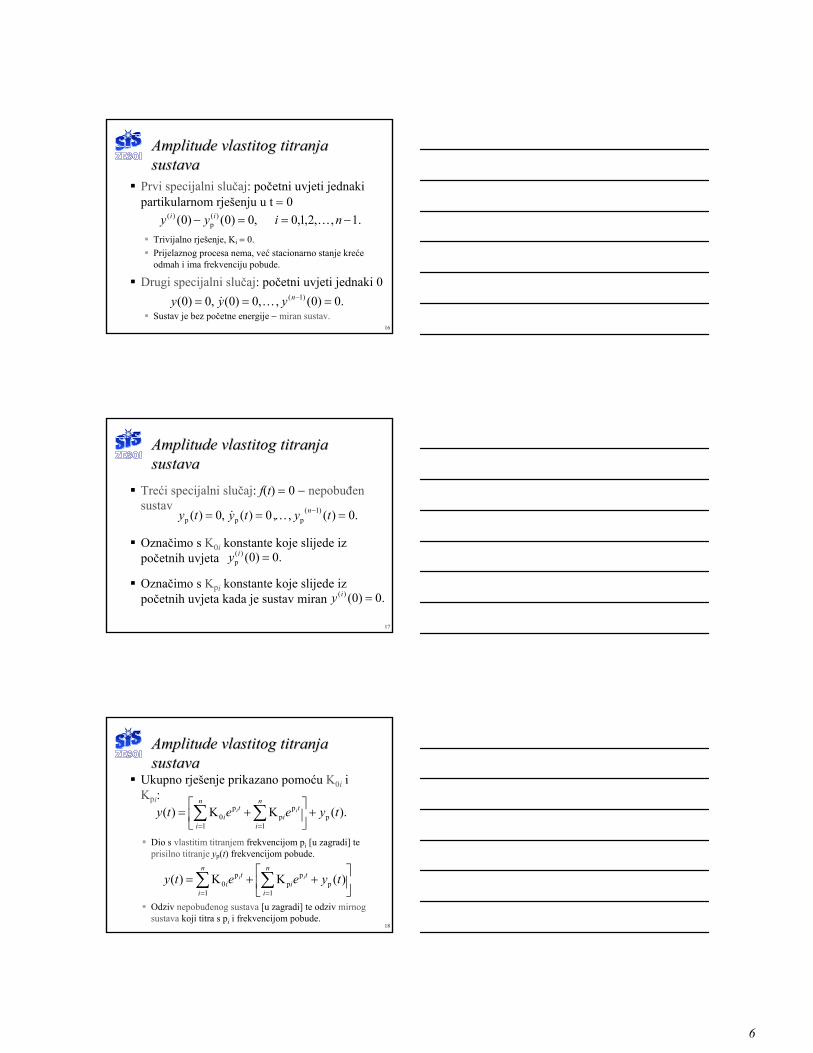
Prvi specijalni slučaj: početni uvjeti jednaki partikularnom rješenju u t = 0
.1,,2,1,0,0)0()0( )(p
)( −==− niyy ii K
Trivijalno rješenje, Ki = 0.Prijelaznog procesa nema, već stacionarno stanje kreće odmah i ima frekvenciju pobude.
Drugi specijalni slučaj: početni uvjeti jednaki 0.0)0(,,0)0(,0)0( )1( === −nyyy K&
Sustav je bez početne energije − miran sustav.
17
AmplitudeAmplitude vlastitog titranja vlastitog titranja sustavasustava
Treći specijalni slučaj: f(t) = 0 − nepobuđen sustav
.0)(,,0)(,0)( )1(ppp === − tytyty n
K&
Označimo s K0i konstante koje slijede iz početnih uvjeta .0)0()(
p =iy
.0)0()( =iyOznačimo s Kpi konstante koje slijede iz početnih uvjeta kada je sustav miran
18
AmplitudeAmplitude vlastitog titranja vlastitog titranja sustavasustava
Ukupno rješenje prikazano pomoću K0i iKpi:
).(KK)( p1
pp
1
p0 tyeety
n
i
ti
n
i
ti
ii +
+= ∑∑
==
++= ∑∑
==
)(KK)( p1
pp
1
p0 tyeety
n
i
ti
n
i
ti
ii
Dio s vlastitim titranjem frekvencijom pi [u zagradi] te prisilno titranje yp(t) frekvencijom pobude.
Odziv nepobuđenog sustava [u zagradi] te odziv mirnog sustava koji titra s pi i frekvencijom pobude.
7
19
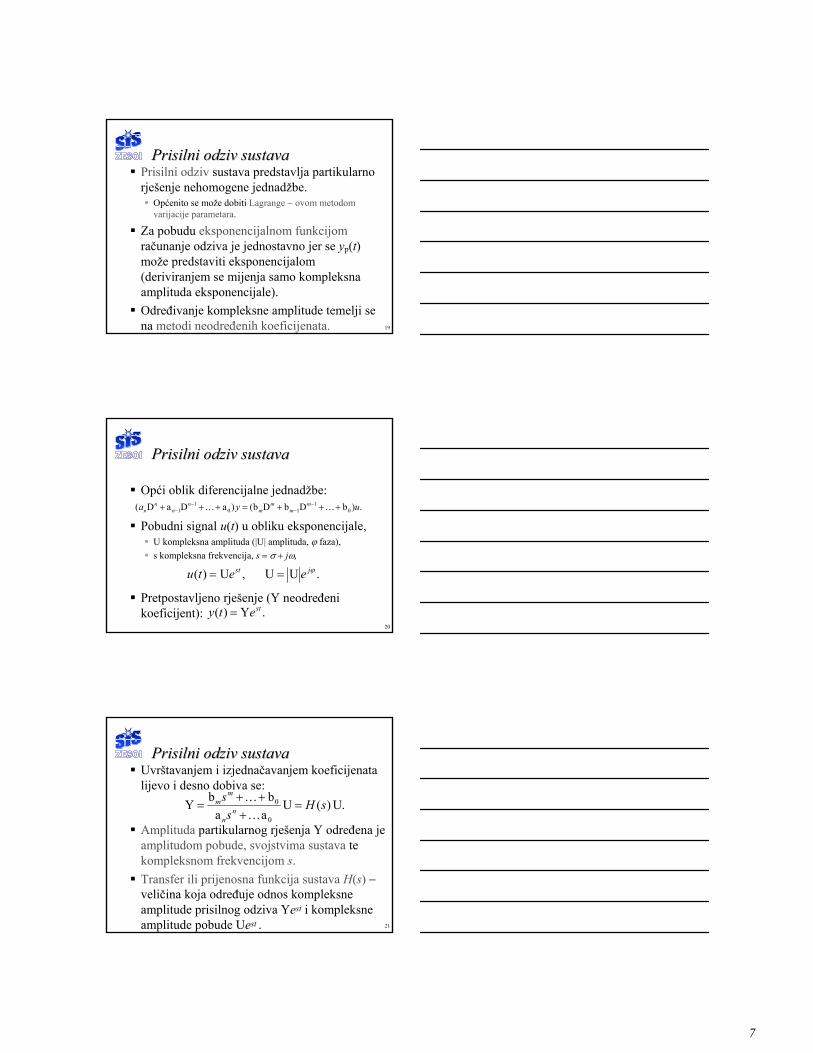
Prisilni odziv sustavaPrisilni odziv sustavaPrisilni odziv sustava predstavlja partikularno rješenje nehomogene jednadžbe.
Općenito se može dobiti Lagrange − ovom metodom varijacije parametara.
Za pobudu eksponencijalnom funkcijom računanje odziva je jednostavno jer se yp(t)može predstaviti eksponencijalom (deriviranjem se mijenja samo kompleksna amplituda eksponencijale).Određivanje kompleksne amplitude temelji sena metodi neodređenih koeficijenata.
20
Prisilni odziv sustavaPrisilni odziv sustava
Opći oblik diferencijalne jednadžbe:.)bDbDb()aDaD( 0
110
11 uya m
mm
mn
nn
n +++=+++ −−
−− KK
.UU,U)( ϕjst eetu ==
Pobudni signal u(t) u obliku eksponencijale,U kompleksna amplituda (|U| amplituda, ϕ faza),s kompleksna frekvencija, s = σ + jω,
Pretpostavljeno rješenje (Y neodređeni koeficijent): .Y)( stety =
21
Uvrštavanjem i izjednačavanjem koeficijenata lijevo i desno dobiva se:
.U)(Uaa
bbY0
0 sHs
sn
n
mm =
+++
=K
K
Amplituda partikularnog rješenja Y određena je amplitudom pobude, svojstvima sustava tekompleksnom frekvencijom s. Transfer ili prijenosna funkcija sustava H(s) −veličina koja određuje odnos kompleksneamplitude prisilnog odziva Yest i kompleksneamplitude pobude Uest .
Prisilni odziv sustavaPrisilni odziv sustava

8
22
UY
aabb)(0
0 =+
++=
K
Kn
n
mm
sssH
H(s) je formalno jednak operatoru H(D) aliH(D) pridružuje vremensku funkciju y funkciji u
y = H(D)u,H(s) ima značenje faktora kojim treba množiti kompleksnu amplitudu ulaza da se dobije amplituda izlaza
Y = H(s)U.
Prisilni odziv sustavaPrisilni odziv sustava
23
Specijalni slučajevi kompleksne frekvencije pobude s:
s = 0 − prisilni odziv na pobudu konstantom
.ab)0(,UU
0
00 === Heu t
s = jω − odziv na harmonijsku (ili sinusnu) pobudu, je dan izrazom:
,)()()()()( )(ir
ωϕωωωωω jeAjHHHjH =+==
Prisilni odziv sustavaPrisilni odziv sustava
koji se naziva frekvencijska karakteristika sustava.
24
A(ω) − amplitudno frekvencijska karakteristika.ϕ(ω) − fazno frekvencijska karakteristika.Ako je yp(t) = Yest posljedica u(t) = Uest onda je yp(t) = Re{Yest} posljedica Re{Uest}.
Prisilni odziv sustavaPrisilni odziv sustava
9
25
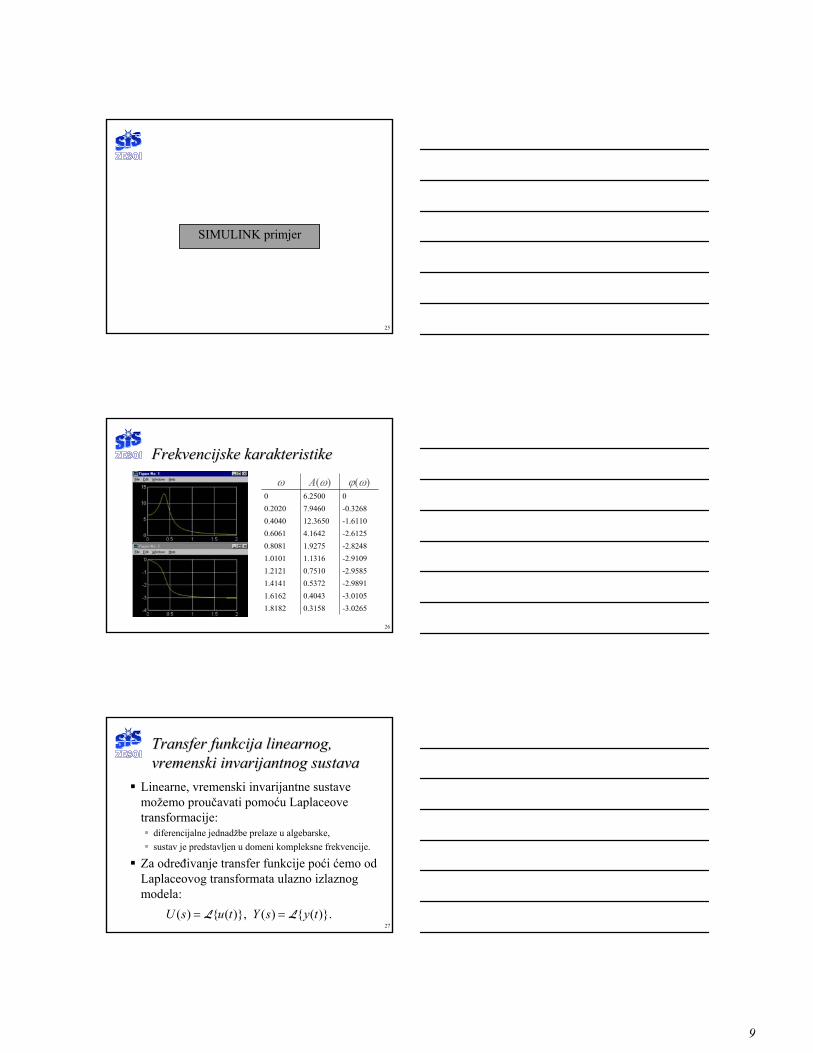
Primjer − SIMULINKSIMULINK primjer
26
Frekvencijske karakteristikeFrekvencijske karakteristike
-3.02650.31581.8182-3.01050.40431.6162-2.98910.53721.4141-2.95850.75101.2121-2.91091.13161.0101-2.82481.92750.8081-2.61254.16420.6061-1.611012.36500.4040-0.32687.94600.202006.25000
ϕ(ω)A(ω)ω
27
TransferTransfer funkcija linearnogfunkcija linearnog,,vremenski invarijantnog sustavavremenski invarijantnog sustava
)}.({)()},({)( tysYtusU L== L
Linearne, vremenski invarijantne sustave možemo proučavati pomoću Laplaceove transformacije:
diferencijalne jednadžbe prelaze u algebarske,sustav je predstavljen u domeni kompleksne frekvencije.
Za određivanje transfer funkcije poći ćemo od Laplaceovog transformata ulazno izlaznog modela:
10
28
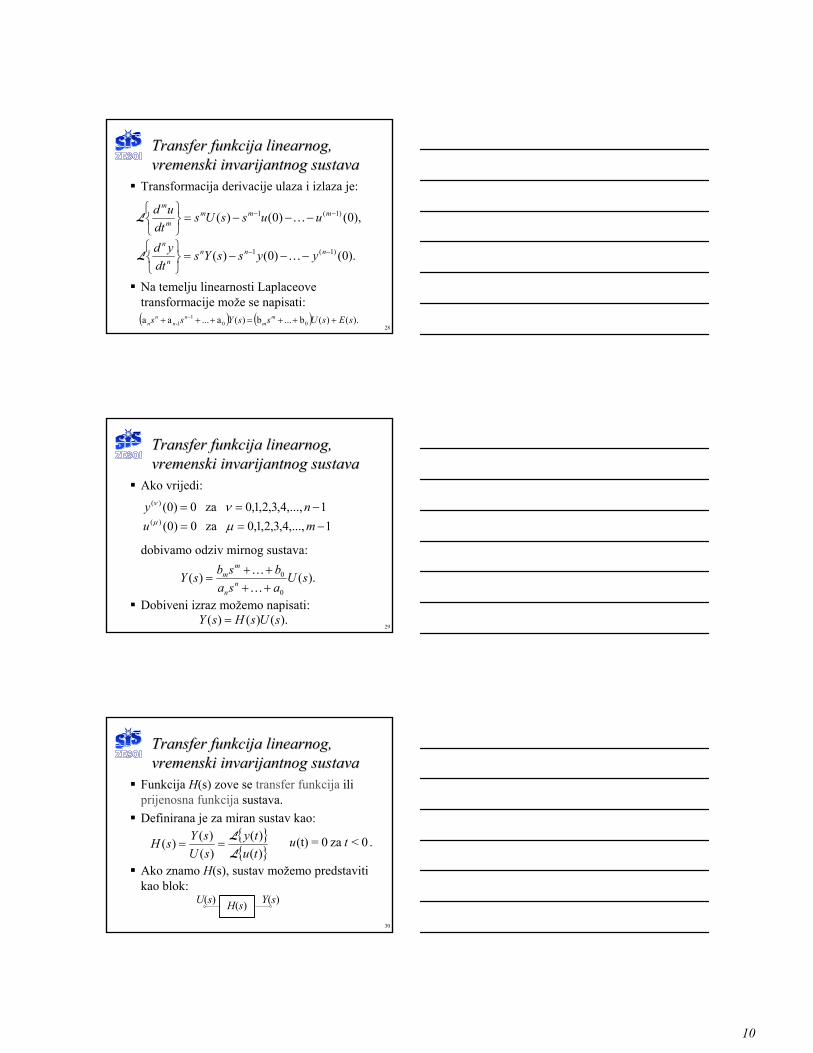
),0()0()( )1(1 −− −−−=
mmm
m
m
uussUsdt
udKL
).0()0()( )1(1 −− −−−=
nnn
n
n
yyssYsdt
ydKL
TransferTransfer funkcija linearnogfunkcija linearnog,,vremenski invarijantnog sustavavremenski invarijantnog sustava
Transformacija derivacije ulaza i izlaza je:
( ) ( ) ).( )(b...b )(a...aa 001
1- sEsUssYss mm
nn
nn +++=+++ −
Na temelju linearnosti Laplaceove transformacije može se napisati:
29
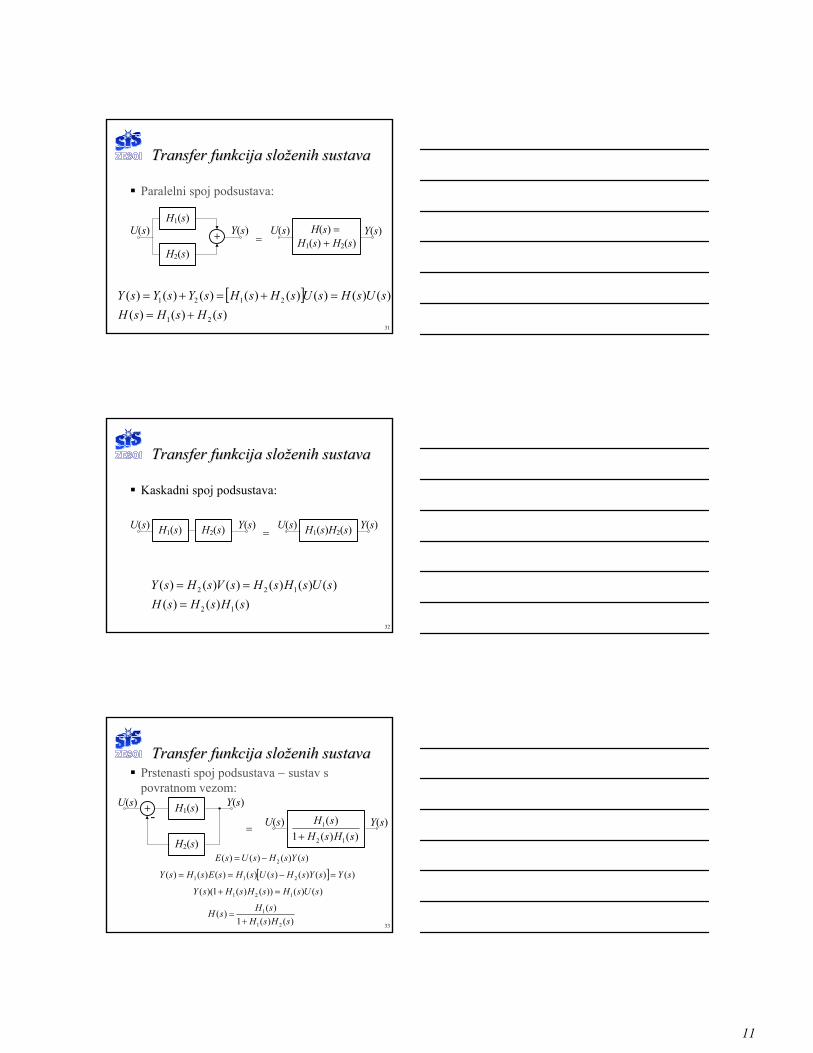
1,...,4,3,2,1,0 za 0)0()( −== ny νν
1,...,4,3,2,1,0 za 0)0()( −== mu µµ
).()(0
0 sUasabsbsY n
n
mm
++++
=K
K
TransferTransfer funkcija linearnogfunkcija linearnog,,vremenski invarijantnog sustavavremenski invarijantnog sustava
dobivamo odziv mirnog sustava:
Dobiveni izraz možemo napisati:).()()( sUsHsY =
Ako vrijedi:
30
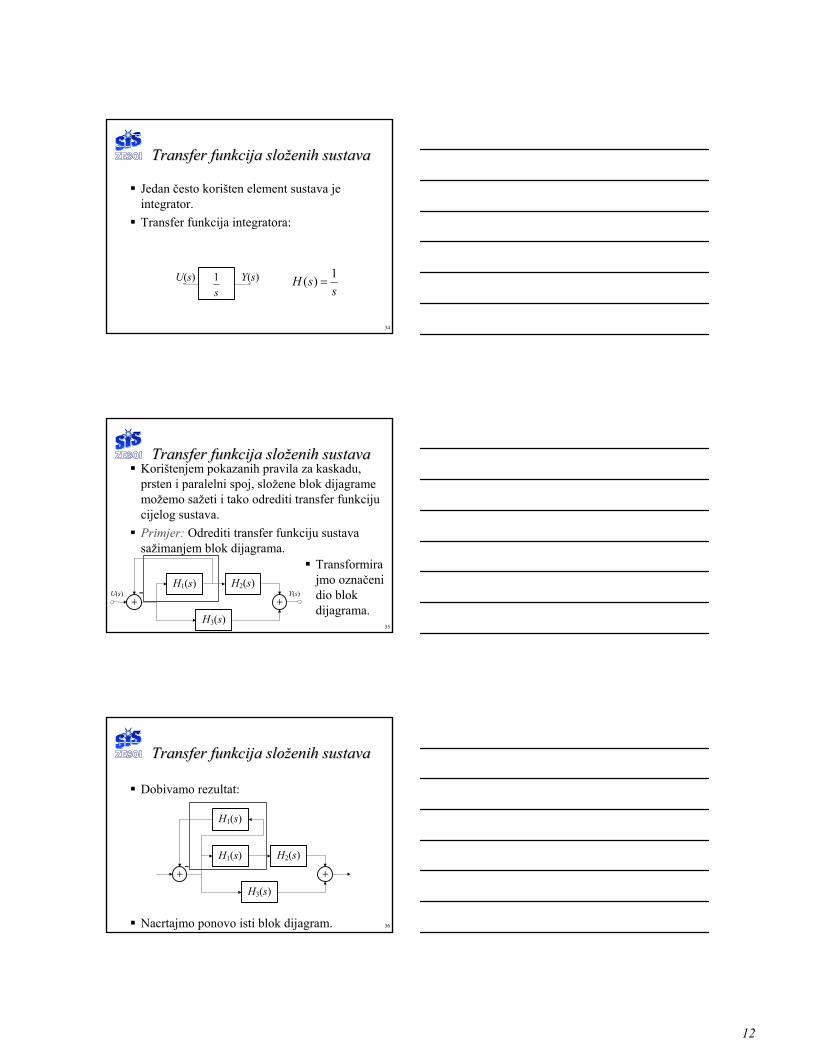
{ }{ }
)()(
)()()(
tuty
sUsYsH
LL
== . 0< za 0=(t) tu
Ako znamo H(s), sustav možemo predstaviti kao blok:
TransferTransfer funkcija linearnogfunkcija linearnog,,vremenski invarijantnog sustavavremenski invarijantnog sustava
Funkcija H(s) zove se transfer funkcija ili prijenosna funkcija sustava.Definirana je za miran sustav kao:
Y(s) U(s) H(s)
11
31
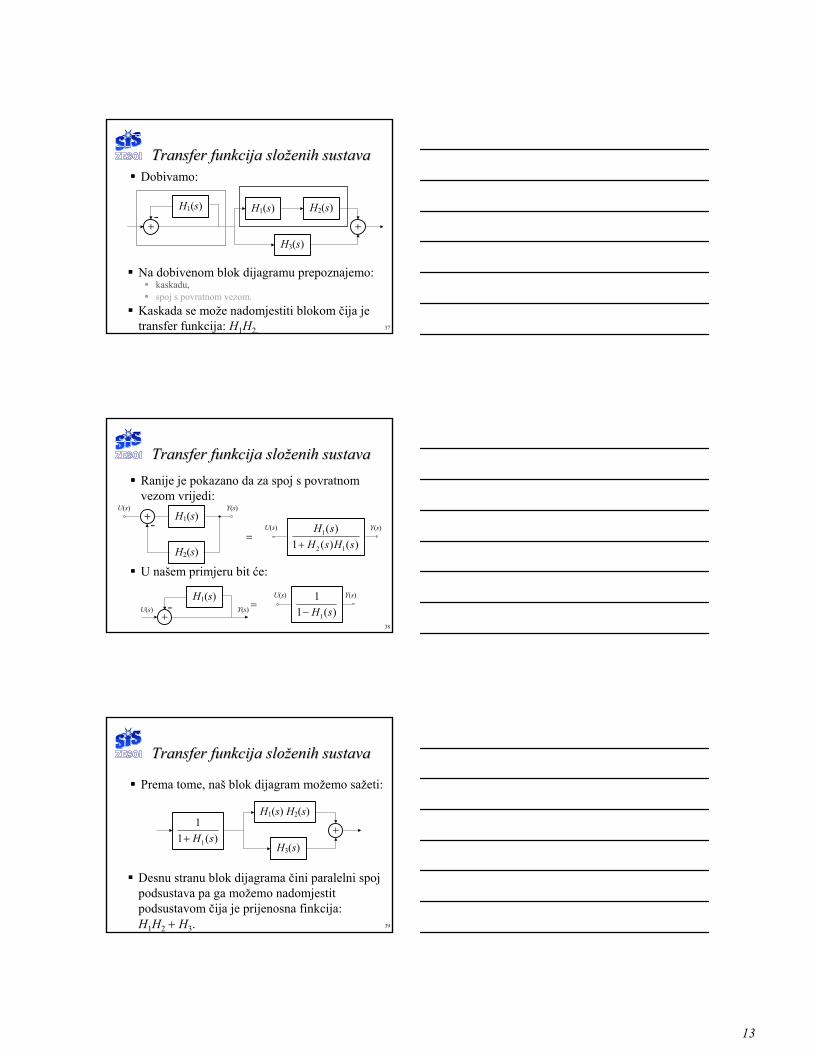
Paralelni spoj podsustava:
[ ])()()(
)()()()()()()()(
21
2121
sHsHsHsUsHsUsHsHsYsYsY
+==+=+=
TransferTransfer funkcija složenih sustavafunkcija složenih sustava
Y(s)H1(s)
H2(s)
U(s) Y(s) H(s) = H1(s) + H2(s)
U(s) =
32
TransferTransfer funkcija složenih sustavafunkcija složenih sustava
)()()( )()()()()()(
12
122
sHsHsHsUsHsHsVsHsY
===
Kaskadni spoj podsustava:
Y(s)Y(s) H1(s) H2(s)
U(s) H1(s)H2(s)
U(s) =
33
Prstenasti spoj podsustava − sustav spovratnom vezom:
)()()()( 2 sYsHsUsE −=
[ ] )()()()()()()()( 211 sYsYsHsUsHsEsHsY =−==
)()())()(1)(( 121 sUsHsHsHsY =+
)()(1)()(
21
1
sHsHsHsH
+=
TransferTransfer funkcija složenih sustavafunkcija složenih sustava
Y(s)H1(s)
H2(s)
U(s) Y(s)
)()(1)(
12
1
sHsHsH
+U(s) =
12
34
Jedan često korišten element sustava jeintegrator.Transfer funkcija integratora:
ssH 1)( =
TransferTransfer funkcija složenih sustavafunkcija složenih sustava
Y(s) U(s) s1
35
Transformirajmo označeni dio blok dijagrama.
TransferTransfer funkcija složenih sustavafunkcija složenih sustava
H1(s)
H3(s)
H2(s)
Y(s) U(s)
Korištenjem pokazanih pravila za kaskadu,prsten i paralelni spoj, složene blok dijagrame možemo sažeti i tako odrediti transfer funkciju cijelog sustava.Primjer: Odrediti transfer funkciju sustava sažimanjem blok dijagrama.
36
Dobivamo rezultat:
Nacrtajmo ponovo isti blok dijagram.
TransferTransfer funkcija složenih sustavafunkcija složenih sustava
H1(s)
H3(s)
H2(s)
H1(s)
13
37
Dobivamo:
Na dobivenom blok dijagramu prepoznajemo:kaskadu,spoj s povratnom vezom.
Kaskada se može nadomjestiti blokom čija jetransfer funkcija: H1H2,
TransferTransfer funkcija složenih sustavafunkcija složenih sustava
H1(s)
H3(s)
H2(s) H1(s)
38
Ranije je pokazano da za spoj s povratnom vezom vrijedi:
U našem primjeru bit će:
TransferTransfer funkcija složenih sustavafunkcija složenih sustava
H1(s) Y(s)
)(11
1 sH−U(s) = Y(s)
U(s)
Y(s) H1(s)
H2(s)
U(s) Y(s)
)()(1)(
12
1
sHsHsH
+
U(s) =
39
Prema tome, naš blok dijagram možemo sažeti:
Desnu stranu blok dijagrama čini paralelni spoj podsustava pa ga možemo nadomjestit podsustavom čija je prijenosna finkcija:H1H2 + H3.
TransferTransfer funkcija složenih sustavafunkcija složenih sustava
H1(s) H2(s)
H3(s)
)(11
1 sH+

14
40
Daljnjim sažimanjem dobivamo kaskadu:
Cijeli sustav prikazan jednim blokom ima oblik:
TransferTransfer funkcija složenih sustavafunkcija složenih sustava
H1(s) H2(s) + H3(s)
)(11
1 sH+
)(1 )( )(
1
321
sHsΗsHsH
+)(+
41
Sustav s više ulaza i izlaza može biti opisan s:
.)D()D()D()D(
,)D()D()D()D(,)D()D()D()D(
1111
21212121
11111111
mrmrrrrr
mmrr
mmrr
uBuByAyA
uBuByAyAuBuByAyA
++=++
++=++++=++
KK
MM
KK
KK
Ako su ulaz i izlaz definirani s:[ ][ ]t
m
tr
uuu
yyy
,,,
,,,
21
21
K
K
≡
≡
u
y
Ulazno izlazniUlazno izlazni modelmodel sustavasustava ssviše ulazaviše ulaza ii izlazaizlaza
jednadžbe možemo napisati u matričnom obliku: .(D) (D) uKyL =
42
TransferTransfer matrica sustavamatrica sustava ss više više ulazaulaza ii izlazaizlaza
Laplaceova transformacija skupa jednadžbi ima oblik:
)( )()()()( sssss EUKYL +=
Ulazni vektor se množi s matricom:
koja se zove transfer matrica sustava.)()()( 1 sss KLH −=
Za mirni sustav, E(s) = 0, izlaz je jednak:
).()()()()()( 1 ssssss UHUKLY == −
gdje E(s) sadrži članove s početnim uvjetima.
15
43
Vladanje sustava opisuje vektorska dif.jednadžba: BuAxx +=&A je matrica koeficijenata (realnih ikonstantnih): { } .,...,2,1, , njiaij =
B je pobudna ili kontrolna matrica konstantnih elemenata:
{ } .,...,2,1 ;,...,2,1 , mknibik ==
Model sModel s varijablama stanja varijablama stanja linearnog sustavalinearnog sustava
44
Vektorska jednadžba:
BuAxx +=&identična je skupu linearnih dif. jednadžbi prvog reda:
. ,1,2, = ,)()()(1 1
nitubtxatxn
j
m
kkikjiji …+= ∑ ∑
= =
&
Ako je pobuda u = 0, jednadžba je homogena:
.)( )( tt xAx =&
Model sModel s varijablama stanja varijablama stanja linearnog sustavalinearnog sustava
45
Izlazna vektorska jednadžba:).()()( ttt DuCxy +=
identična je skupu linearnih algebarskih jednadžbi:
. ,1,2, = i ),()()(1 1
rtudtxctyn
j
m
kkikjiji …+= ∑ ∑
= =
Model sModel s varijablama stanja varijablama stanja linearnog sustavalinearnog sustava
16
46
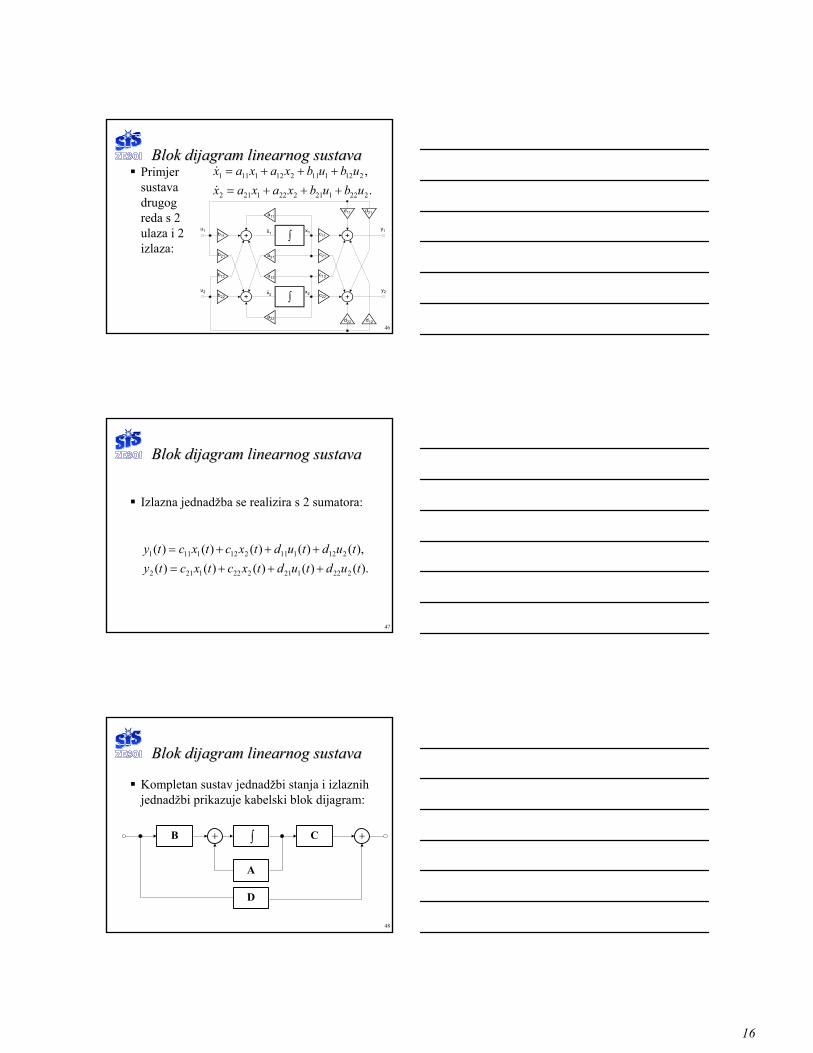
Primjer sustava drugog reda s 2ulaza i 2 izlaza:
.,
2221212221212
2121112121111
ububxaxaxububxaxax
+++=+++=
&
&Blok dijagram linearnog sustavaBlok dijagram linearnog sustava
47
Izlazna jednadžba se realizira s 2 sumatora:
).()()()()(),()()()()(
2221212221212
2121112121111
tudtudtxctxctytudtudtxctxcty
+++=+++=
Blok dijagram linearnog sustavaBlok dijagram linearnog sustava
48
Kompletan sustav jednadžbi stanja i izlaznih jednadžbi prikazuje kabelski blok dijagram:
Blok dijagram linearnog sustavaBlok dijagram linearnog sustava
∫ B C
A
D
17
49
Direktna metoda:Pođimo od prijenosne funkcije:
,1a, a
b)( 0
0 =++
= nnssH
K
).(b)()a( 00 sUsYsn =++KIzdvojimo član s najvišom derivacijom:
( ) ( ),)(a1)(a1)(b)( 010 sYss
sYss
sUsYs nn
nn
n −−−= − K
.aab 0)1(
10)( yyuy n
nn −−−= −
− K
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
50
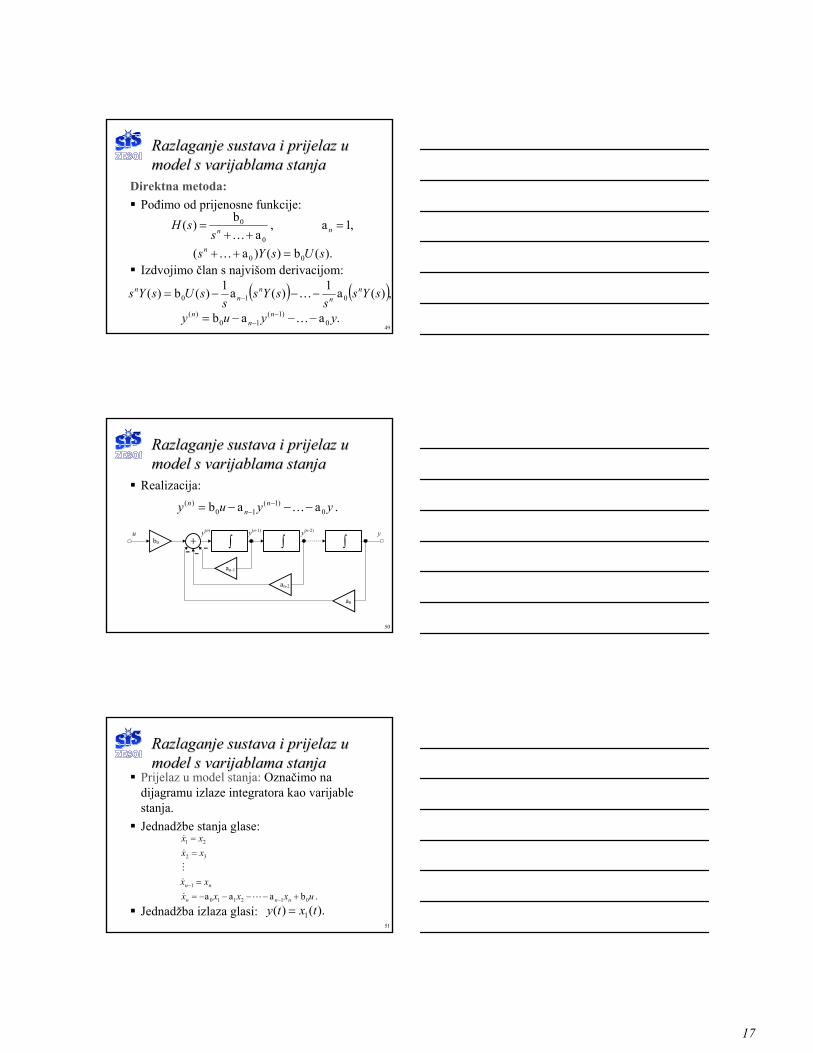
Realizacija:
. aab 0)1(
10)( yyuy n
nn −−−= −
− K
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
∫ ∫ ∫
an-1
an-2
a0
b0
u y y(n) y(n-1) y(n-2)
51
Prijelaz u model stanja: Označimo na dijagramu izlaze integratora kao varijable stanja.Jednadžbe stanja glase:
. baaa 012110
1
32
21
uxxxxxx
xxxx
nnn
nn
+−−−−==
==
−
−
L&
&
M
&
&
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
Jednadžba izlaza glasi: ).()( 1 txty =
18
52
U općem slučaju, bi ≠ 0, možemo pisati:
).()()()()()( sZsB
sAsUsBsY =
=
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
Nakon toga napravimo linearnu kombinaciju svih izlaza integratora, prema izrazu:
( ) ).(bb)()()( 0 sZ...ssZsBsY mm ++==
Sada prvo realiziramo:
što je isto kao u prošlom primjeru.)()(
sAsUZ(s) =
53
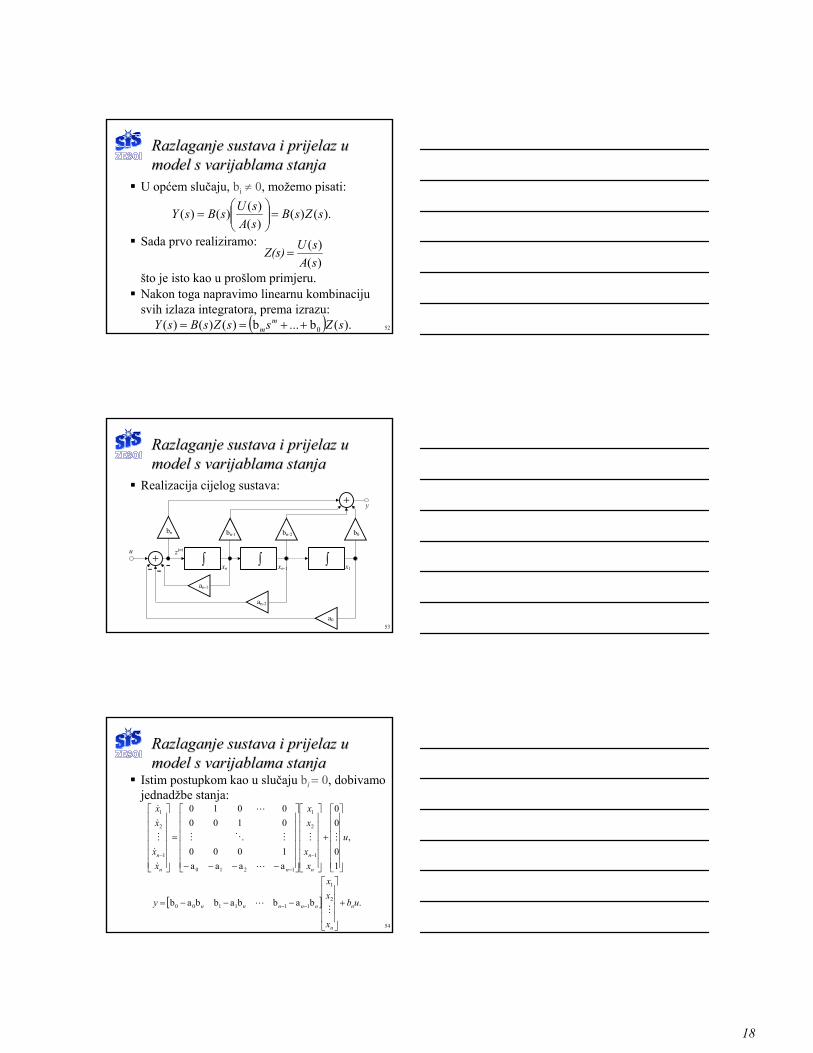
Realizacija cijelog sustava:
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
∫ ∫ ∫
an-1
an-2
a0
u
y
z(n)
bn
xn xn-1 x1
bn-1 bn-2 b0
54
Istim postupkom kao u slučaju bi = 0, dobivamojednadžbe stanja:
,
10
00
aaaa1000
01000010
1
2
1
1210
1
2
1
u
xx
xx
xx
xx
n
n
nn
n
+
−−−−
=
−
−
−
MM
L
MOM
L
&
&
M
&
&
[ ] .babbabbab 2
1
111100 ub
x
xx
y n
n
nnnnn +
−−−= −−M
L
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
19
55
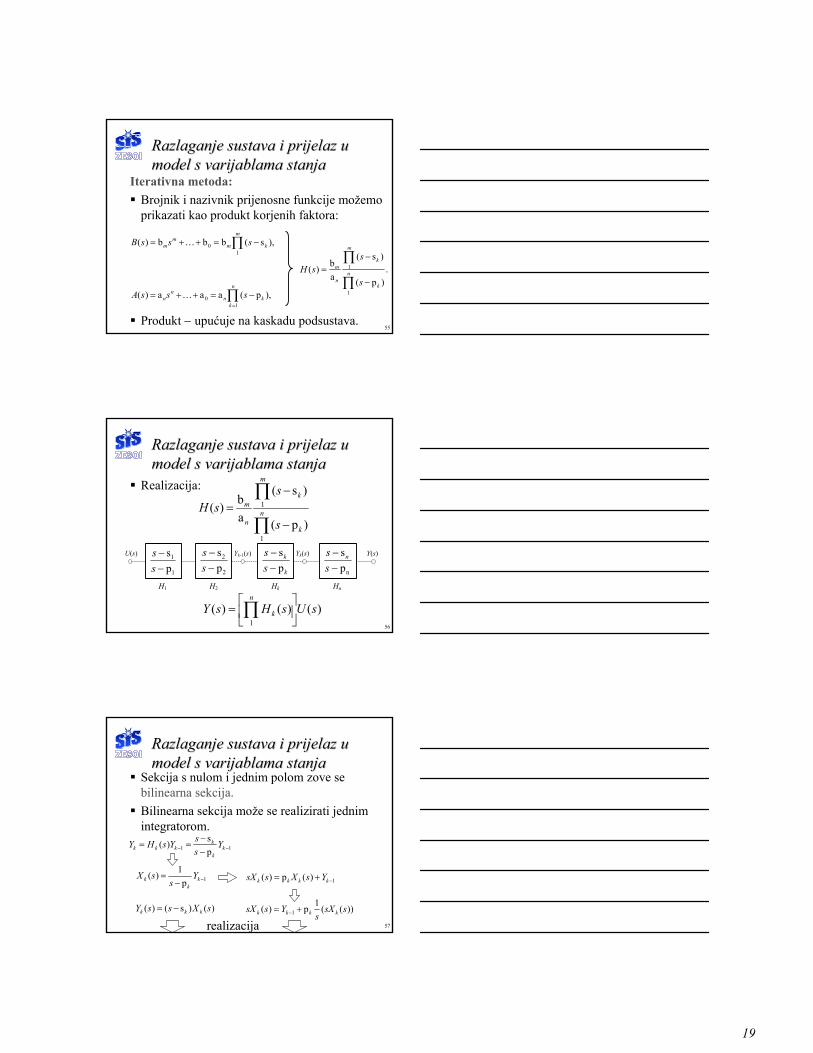
Iterativna metoda:Brojnik i nazivnik prijenosne funkcije možemo prikazati kao produkt korjenih faktora:
,)s(bbb)( 1
0 ∏ −=++=m
kmm
m sssB K
,)p(aaa)( 1
0 ∏=
−=++=n
kkn
nn sssA K
Produkt − upućuje na kaskadu podsustava.
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
.)p(
)s(
ab)(
1
1
∏
∏
−
−= n
k
m
k
n
m
s
ssH
56
Realizacija:
∏
∏
−
−= n
k
m
k
n
m
s
ssH
1
1
)p(
)s(
ab)(
)()()(1
sUsHsYn
k
= ∏
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
Yk-1(s) U(s)
1
1
ps
−−
ss
2
2
ps
−−
ss
k
k
ss
ps
−− Yk(s)
nps
−−
ss n Y(s)
H1 H2 Hk Hn
57
Sekcija s nulom i jednim polom zove sebilinearna sekcija.Bilinearna sekcija može se realizirati jednim integratorom.
ps)( 11 −− −
−== k
k
kkkk Y
ssYsHY
p
1)( 1−−= k
kk Y
ssX
)()s()( sXssY kkk −=
)(p)( 1−+= kkkk YsXssX
))((1p)( 1 ssXs
YssX kkkk += −
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
realizacija
20
58
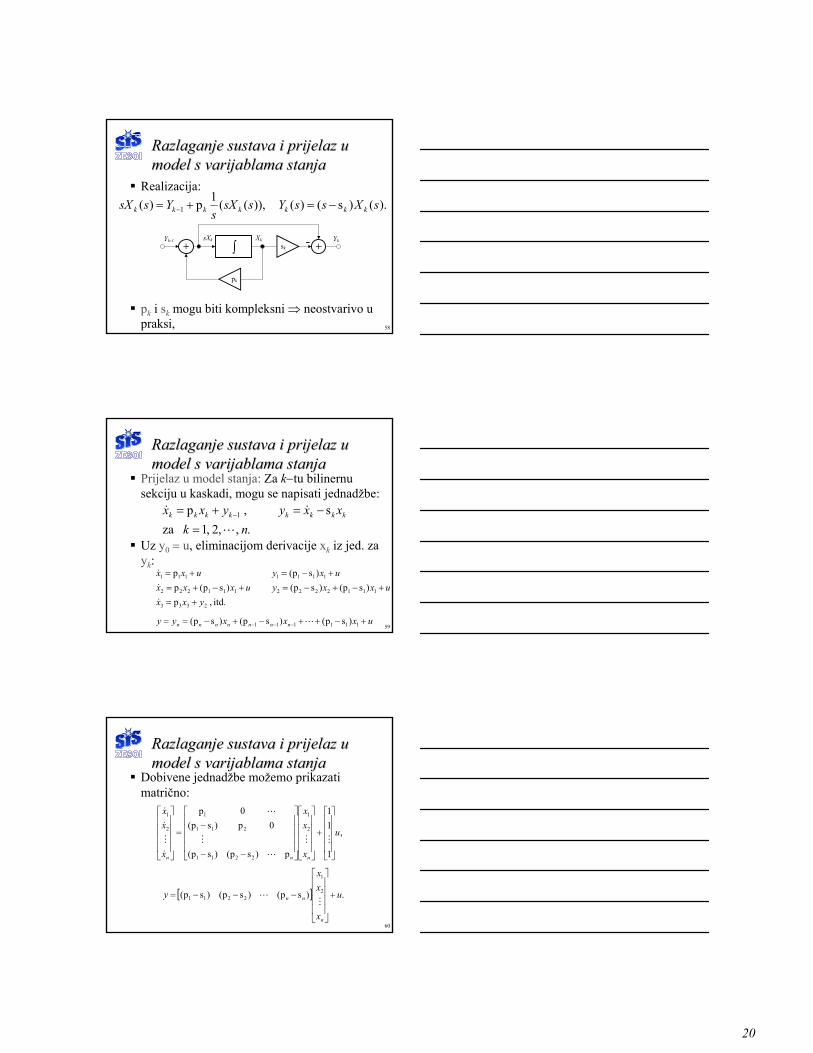
Realizacija:).()s()()),((1p)( 1 sXssYssX
sYssX kkkkkkk −=+= −
pk i sk mogu biti kompleksni ⇒ neostvarivo upraksi,
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
∫
pk
sk
Yk-1 sXk Xk
Yk
59
Prijelaz u model stanja: Za k−tu bilinernu sekciju u kaskadi, mogu se napisati jednadžbe:
. , ,2 ,1 zas, p 1
nkxxyyxx kkkkkkkk
L
&&
=−=+= −
Uz y0 = u, eliminacijom derivacije xk iz jed. za yk:
itd. , p)sp()sp()sp(p
)sp(p
2333
1112222111222
1111111
yxxuxxyuxxx
uxyuxx
+=+−+−=+−+=
+−=+=
&
&
&
)sp()sp()sp( 111111 uxxxyy nnnnnnn +−++−+−== −−− L
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
60
Dobivene jednadžbe možemo prikazati matrično:
,
1
11
p)sp()sp(
0p)sp(0p
2
1
2211
211
1
2
1
u
x
xx
x
xx
nnn
+
−−
−=
MM
L
M
L
&
M
&
&
[ ] .)sp()sp()sp( 2
1
2211 u
x
xx
y
n
nn +
−−−=M
L
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
21
61
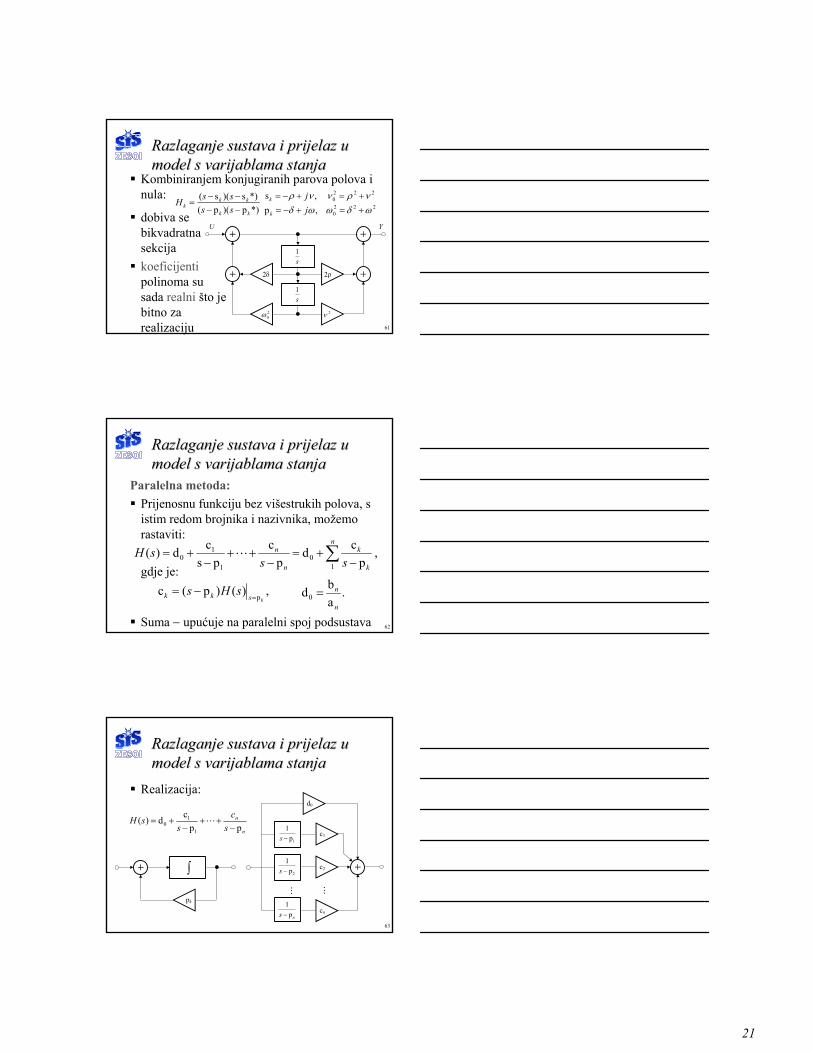
Kombiniranjem konjugiranih parova polova inula:
2220
2220
,p,s
*)p)(p(*)s)(s(
ωδωωδνρννρ
+=+−=+=+−=
−−−−
=jj
ssssH
k
k
kk
kkk
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
dobiva sebikvadratna sekcijakoeficijenti polinoma su sada realni što je bitno za realizaciju
2δ
Y
s1
20ω
2ρ
U
2ν
s1
62
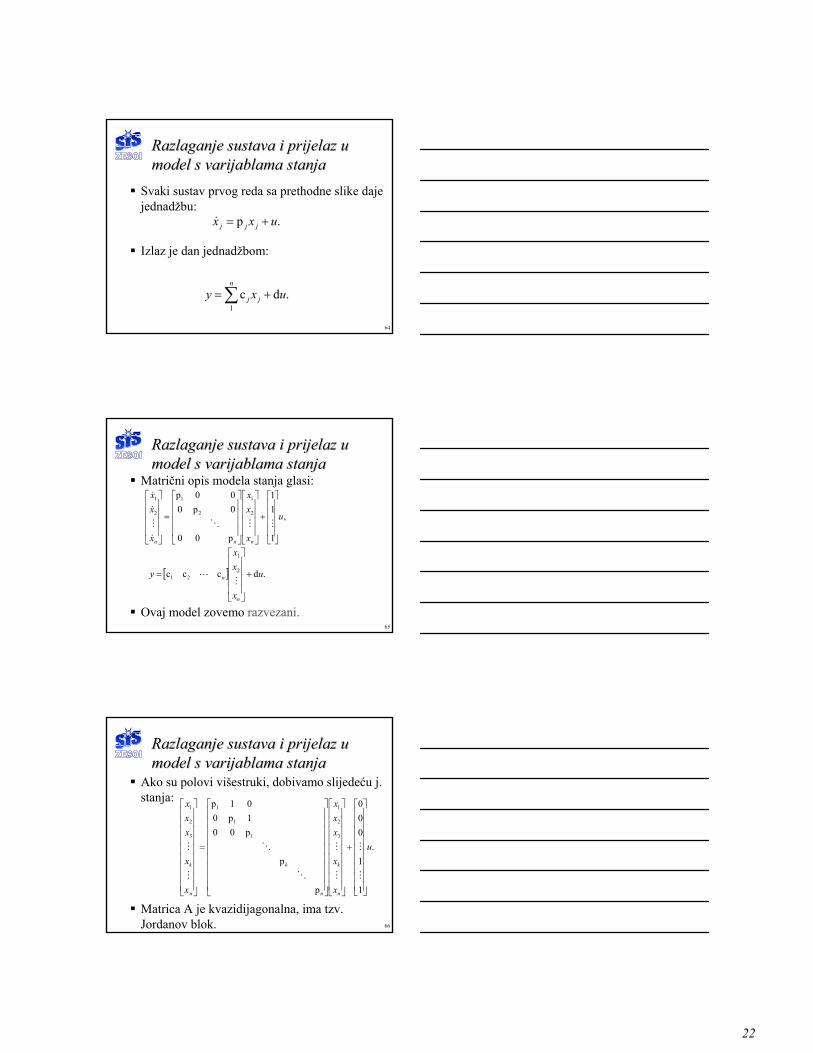
Paralelna metoda:Prijenosnu funkciju bez višestrukih polova, sistim redom brojnika i nazivnika, možemo rastaviti:
, p
cdp
cps
cd)( 1
01
10 ∑ −
+=−
++−
+=n
k
k
n
n
sssH L
gdje je:,)()p(c
pkskk sHs=
−= .abd0
n
n=
Suma − upućuje na paralelni spoj podsustava
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
63
Realizacija:
n
n
sc
ssH
ppcd)(
1
10 −
++−
+= L
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
∫
pk
1p1−s
2p1
−s
...
c1
c2
cn
...
ns p1
−
d0
22
64
Svaki sustav prvog reda sa prethodne slike daje jednadžbu:
.p uxx jjj +=&
Izlaz je dan jednadžbom:
.dc1
uxyn
jj += ∑
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
65
Matrični opis modela stanja glasi:
,
1
11
p00
0p000p
2
1
2
1
2
1
u
x
xx
x
xx
nnn
+
=
MMO
&
M
&
&
[ ] .dccc 2
1
21 u
x
xx
y
n
n +
=M
L
Ovaj model zovemo razvezani.
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
66
Ako su polovi višestruki, dobivamo slijedeću j.stanja:
.
1
1
000
p
p
p001p001p
3
2
1
1
1
1
3
2
1
u
x
x
xxx
x
x
xxx
n
k
n
k
n
k
+
=
M
M
M
M
O
O
M
M
Matrica A je kvazidijagonalna, ima tzv.Jordanov blok.
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
23
67
Izlazna jednadžba ima oblik:
[ ] .dccc 2
1
21 u
x
xx
y
n
n +
=M
L
Razlaganje sustavaRazlaganje sustava ii prijelazprijelaz u u model smodel s varijablama stanjavarijablama stanja
68
Transformacija varijabli stanjaTransformacija varijabli stanja
.DuCxyBuAxx +=+=&Isti sustav možemo prikazati i pomoću drugih varijabli stanja zi.Varijable z su linearna kombinacija varijabli x:
x = PzMatrica P ne smije biti singularna:
det P ≠ 0
Pretpostavimo da je sustav opisan pomoću varijabli stanja xi:
69
Uvrstimo:Pzx = DuCxyBuAxx +=+=&
BuAPzzP +=&
BuPAPzPz 11 −− +=&
uBzAz ** +=&
DuCPzy +=
uDzCy ** +=Nove matrice sustava imaju oblik:
.,,, DDCPCBPBAPPA **1*1* ==== −−
Transformacija varijabli stanjaTransformacija varijabli stanja
⋅−1P
24
70
Kako odabrati matricu P ?Tako da matrica A* bude dijagonalna (kanonski oblik).U tom slučaju P se zove modalna matrica.
Kako naći modalnu matricu ?Promatrajmo transformaciju vektora x u y:
y = AxZa koji x će y imati isti smjer u vektorskom prostoru ?
y = Ax = λx(λ je skalar)
Transformacija varijabli stanjaTransformacija varijabli stanja
71
Jednakost:Ax = λx
predstavlja homogen sustav jednadžbi:(λI − A)x = 0
Matrica I je jedinična matrica:
=
1000
10001
L
OM
M
L
I
Transformacija varijabli stanjaTransformacija varijabli stanja
72
Netrivijalno rješenje xk ≠ 0 dobiva se:det (λI − A) = 0.
Ako je matrica A dimenzija n × n, dobiva sekarakteristični polinom n−tog stupnja.Korjeni karakterističnog polinoma su vlastite vrijednosti matrice A.Rješenjem jednadžbe
(λI − A)x = 0dobivaju se vlastiti vektori.
Transformacija varijabli stanjaTransformacija varijabli stanja
25
73
Transformacija varijabli ne mijenja vlastite vrijedosti:
=−= )det()( *n AIP λλ
)det( =−= − APPI 1λ=−= −− )det( APPPP 11λ
=⋅−= − PAIP 1 det)det(det λ=−= − )det(detdet AIPP 1 λ
).det( AI −= λ
Transformacija varijabli stanjaTransformacija varijabli stanja
74
Kako dobiti modalnu matricu ?Formirajmo matricu M od vlastitih vektora matrice A:
[ ].21 nxxxM L=Odredimo produkt AM:
[ ] [ ].2121 nn AxAxAxxxxAAM LL ==
Uvrštavanjem Axk = λkxk dobivamo:
[ ].2211 nnxxxAM λλλ L=
Transformacija varijabli stanjaTransformacija varijabli stanja
75
Izraz: [ ]nnxxxAM λλλ L2211=možemo napisati u obliku:
[ ] MΛ
Λ
xxxAM =
=
444 3444 21
OL
n
n
λ
λλ
2
1
21
Vidimo da vrijedi:AM = MΛ → Λ = M-1 AM
Matrica M je modalna matrica.
Transformacija varijabli stanjaTransformacija varijabli stanja
26
76
Sustav prikazan u kanonskom obliku ima oblik:,uΛxx β+=&
[ ].,,...,,diag 21 nλλλ=ΛZa slučaj s različitim korjenima imamo jednadžbe stanja:
.p
,p,p
2211
222121222
212111111
ububxx
ububxxububxx
nnnnn ++=
++=++=
&
M
&
&
Svaka varijabla stanja može se dobiti rješavanjem jedne jednadžbe.
UpravljivostUpravljivost ii osmotrivost sustavaosmotrivost sustava
77
Promotrimo i−tu jednadžbu:niububxx iiiii ,...,2,1 , p 2211 =++=&
Varijabla xi u svom odzivu ima istitravanje karakterističnom frekvencijom pi
Početni uvjet xi(0) istitrat će sefrekvencijom pi
Svaka varijabla stanja istitrava svojom frekvencijom
UpravljivostUpravljivost ii osmotrivost sustavaosmotrivost sustava
78
Sustav je upravljiv ako ulazni signali mogu pobuditi sve karakteristične frekvencije sustava.
2211
222121222
212111111
ububxpx
ububxpxububxpx
nnnnn ++=
+=++=++=
&
M
&&
&
βuΛxx
Sustav s različitim karakterističnim frekvencijama je upravljiv ako matrica β nema nultih redaka
Ako je i−ti red nul−redak, titranje frekvencijom može doći samo od početnih uvjeta, a ne pobudeVarijabla stanja koja odgovara nul−retku je neupravljiva
UpravljivostUpravljivost ii osmotrivost sustavaosmotrivost sustava
27
79
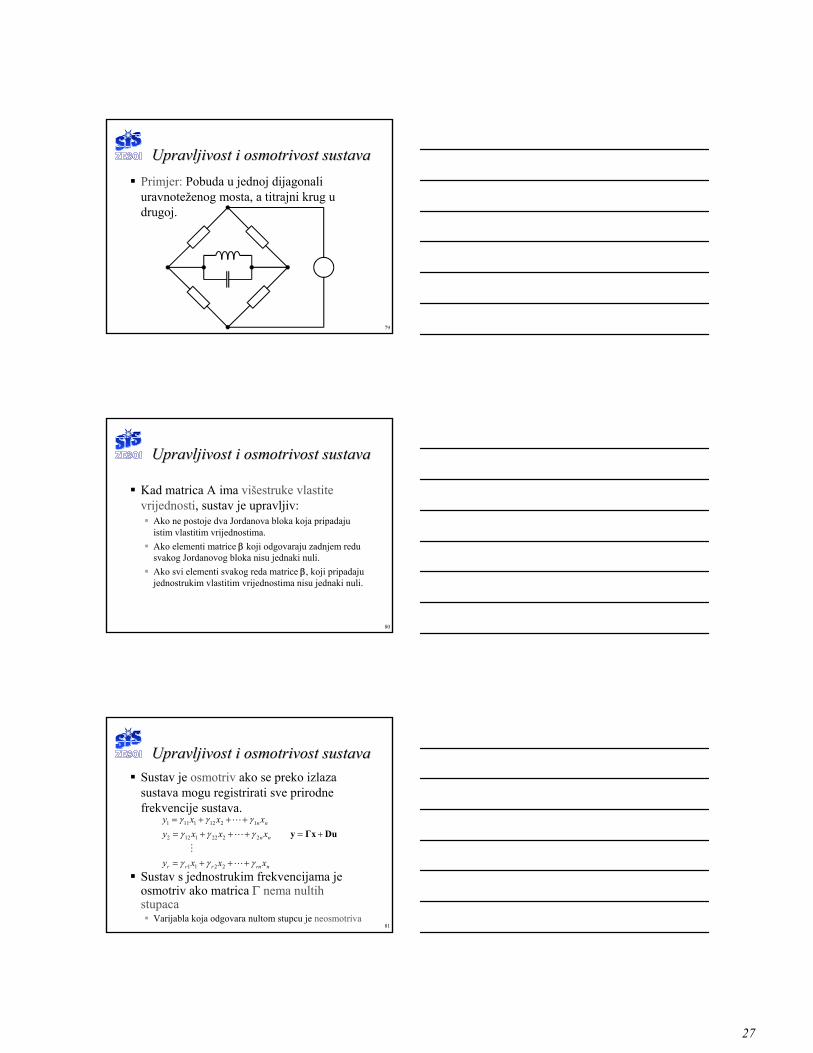
Primjer: Pobuda u jednoj dijagonali uravnoteženog mosta, a titrajni krug udrugoj.
UpravljivostUpravljivost ii osmotrivost sustavaosmotrivost sustava
80
Kad matrica A ima višestruke vlastite vrijednosti, sustav je upravljiv:
Ako ne postoje dva Jordanova bloka koja pripadaju istim vlastitim vrijednostima.Ako elementi matrice β koji odgovaraju zadnjem redu svakog Jordanovog bloka nisu jednaki nuli.Ako svi elementi svakog reda matrice β, koji pripadaju jednostrukim vlastitim vrijednostima nisu jednaki nuli.
UpravljivostUpravljivost ii osmotrivost sustavaosmotrivost sustava
81
Sustav je osmotriv ako se preko izlaza sustava mogu registrirati sve prirodne frekvencije sustava.
nrnrrr
nn
nn
xxxy
xxxyxxxy
γγγ
γγγγγγ
+++=
+=+++=+++=
L
M
L
L
2211
22221122
12121111
DuΓxy
Sustav s jednostrukim frekvencijama je osmotriv ako matrica Γ nema nultih stupaca
Varijabla koja odgovara nultom stupcu je neosmotriva
UpravljivostUpravljivost ii osmotrivost sustavaosmotrivost sustava
28
82
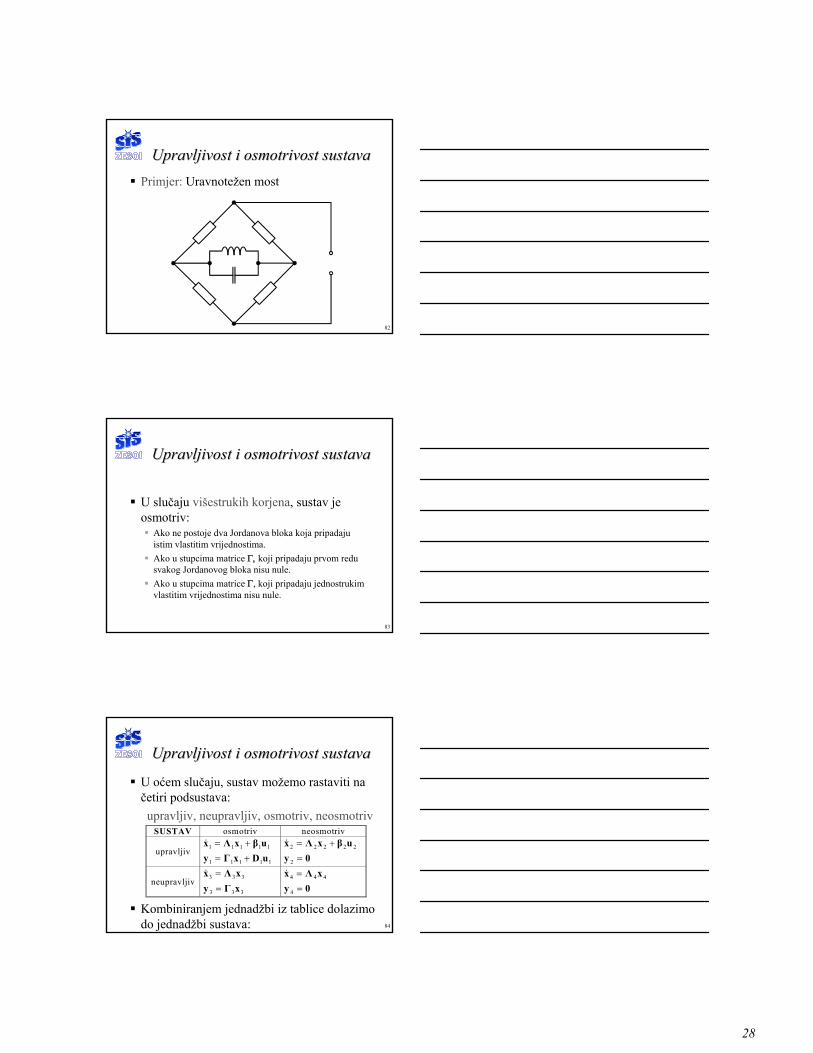
Primjer: Uravnotežen most
UpravljivostUpravljivost ii osmotrivost sustavaosmotrivost sustava
83
U slučaju višestrukih korjena, sustav je osmotriv:
Ako ne postoje dva Jordanova bloka koja pripadaju istim vlastitim vrijednostima.Ako u stupcima matrice Γ, koji pripadaju prvom redu svakog Jordanovog bloka nisu nule.Ako u stupcima matrice Γ, koji pripadaju jednostrukim vlastitim vrijednostima nisu nule.
UpravljivostUpravljivost ii osmotrivost sustavaosmotrivost sustava
84
U oćem slučaju, sustav možemo rastaviti na četiri podsustava:upravljiv, neupravljiv, osmotriv, neosmotriv
SUSTAV osmotriv neosmotriv
upravljiv 11111
11111
uDxΓyuβxΛx
+=+=&
0yuβxΛx
=+=
2
22222&
neupravljiv 333
333
xΓyxΛx
==&
0yxΛx
==
4
444&
Kombiniranjem jednadžbi iz tablice dolazimodo jednadžbi sustava:
UpravljivostUpravljivost ii osmotrivost sustavaosmotrivost sustava
29
85
+
=
2
12
1
4
3
2
1
4
3
2
1
4
3
2
1
0000
00
uuβ
β
xxxx
ΛΛ
ΛΛ
xxxx
&
&
&
&
+
=
2
11
4
3
2
1
3
1
2
1
000
000000
uuD
xxxx
ΓΓ
yy
UpravljivostUpravljivost ii osmotrivost sustavaosmotrivost sustava
86
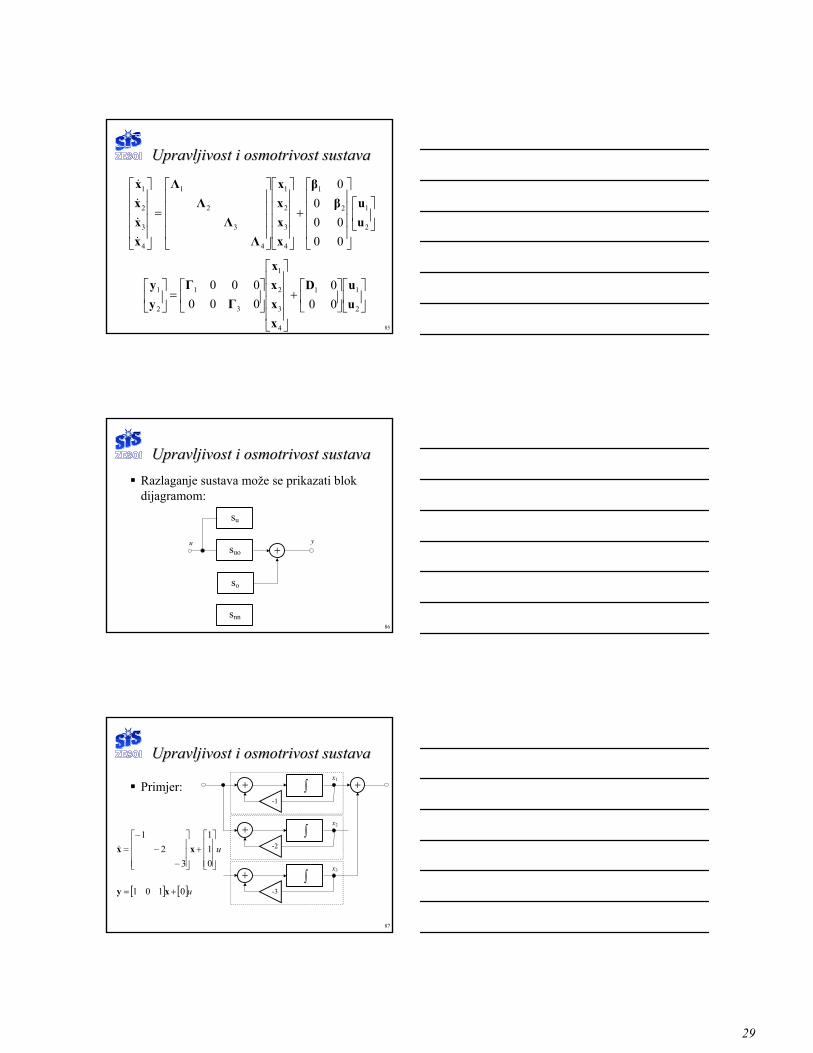
Razlaganje sustava može se prikazati blok dijagramom:
UpravljivostUpravljivost ii osmotrivost sustavaosmotrivost sustava
su
suo
so
snn
u y
87
Primjer:
011
32
1u
+
−−
−= xx&
[ ] [ ]u0101 += xy
UpravljivostUpravljivost ii osmotrivost sustavaosmotrivost sustava
∫
-1
∫
-2
∫
-3
x1
x2
x3


















