Satellite Powerpoint Templatesswcdis.nchu.edu.tw/AlldataPos/AdvancePos/7105042101/專討4.pdf ·...
32
以低價GPS接收儀(GPS-721-MRTU)進 行崩塌潛勢區地表位移監測 Surface Displacement Monitoring on Landslide Susceptible Areas by Low-Cost GPS Receivers (GPS-721-MRTU) 指導教授:蕭宇伸 教授 研究生:徐志磬
Transcript of Satellite Powerpoint Templatesswcdis.nchu.edu.tw/AlldataPos/AdvancePos/7105042101/專討4.pdf ·...
-
以低價GPS接收儀(GPS-721-MRTU)進行崩塌潛勢區地表位移監測
Surface Displacement Monitoring on Landslide Susceptible Areas by Low-Cost GPS Receivers (GPS-721-MRTU)
指導教授:蕭宇伸 教授研究生:徐志磬
-
2
大綱
1. 前言
2. 研究方法
3. 研究區域與材料
4. 結果與討論
5. 結論與建議
-
前言 研究方法研究區域
與材料結果與討論 結論與建議
研究動機與目的
1. 自921大地震後,台灣地質更為鬆動,山坡地土砂災害頻傳,因此長期監測大規模崩塌潛勢地區地表滑動有其必要性。
2. 過去研究指出應用GPS作地滑地地表變位長期監測具有可行性。然而要達到高精度結果所使用之儀器價格昂貴,於監測區域內可架設站數和分佈受預算限制。
3. 水土保持局南投分局委外之「隙頂集水區計畫」,提出綜合考慮電力來源問題、崩塌地地形現狀與規模、地表破壞跡象和保全對象等原因,於阿里山隙頂集水區區域內選定兩塊崩塌潛勢區進行GPS地表位移監測。
3
-
研究動機與目的
4. 計畫選定巃頭地區與樂野地區,嘗試使用低價之GPS單頻接收儀進行GPS自動化即時監測,同時提高站數使監測站能廣泛分佈於監測區域。配合此計畫,吾人蒐集GPS觀測資料進行位移計算與座標變化相關分析。
5. 兩處崩塌潛勢區各設置5處GPS固定樁,經GPS-721-MRTU低價單頻接收儀連續24小時接收GPS訊號,長期監測分析地表水平變位情形,而訊號接收頻率為每兩分鐘一筆,監測時間為2017年5月至12月。結果將佐以網路RTK監測結果相互驗證。
4
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
1. 坡度
2. 坡向
5
研究地區背景資料
研究地區 坡度 一級坡 二級坡 三級坡 四級坡 五級坡 六級坡 合計
巃頭地區
面積(公頃)
1.72 11.16 38.76 3.28 0 0 54.92
百分比(%)
3.13 20.32 70.58 5.97 0 0 100
樂野地區
面積(公頃)
2 20.04 60.36 9.4 0.96 0.04 92.8
百分比(%)
2.16 21.59 65.04 10.13 1.03 0.04 100
研究地區 坡向 北 東北 東 東南 南 西南 西 西北 合計
巃頭地區
面積(公頃)
0.72 1.56 7.32 21.72 18 4.2 1.04 0.36 54.92
百分比(%)
1.31 2.84 13.33 39.55 32.77 7.65 1.89 0.66 100
樂野地區
面積(公頃)
0.2 0.92 6.4 25.32 46.88 11.36 1.6 0.12 92.8
百分比(%)
0.22 0.99 6.90 27.28 50.52 12.24 1.72 0.13 100
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
1. Celebi等人(2002)利用GPS對高層建築進行連續動態監測,計算地震和強風引起的極端運動中層間變位角和動態特性的變化,可以通過建立閾值來評估結構完整性和性能。
2. 沈里俊等人(2003)利用地調所GPS連續觀測網資料,解算屏東-高雄地區各測點之年平均速度,以瞭解此區之地殼變形型態。
3. 沈鍵偉等人(2004)於梨山地滑地區進行GPS長期監測。提出以GPS靜態基線測量,1 秒接收一筆衛星資料,3 個小時靜態基線解算每次移動1 小時,此方法最適用於地滑地監測,且可得到公厘級的精度。 6
GPS監測技術相關回顧
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
4. 朱伯勛等人(2004)於宜蘭縣五峰旗赤皮嶺地滑區,利用GPS進行遠距監控地滑區。提出近基站觀測可提升觀測的精度及解算的成功率,但不論在遠、近基線的實驗上,由本研究結果得知GPS監測系統的精度可達到公分等級。
5. 饒正等人(2008)選擇嘉義縣阿里山鄉五彎仔路段進行一機多天線GPS自動化即時監測,以瞭解阿里山公路邊坡受震後的災害狀況與地滑特性。
7
GPS監測技術相關回顧
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
研究流程
8
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
GPS定位原理
9
GPS衛星提供了兩種型態觀測量:虛擬距離(Pseudo range)觀測量與載波相位(Carrier Phase)觀測量
虛擬距離觀測量公式
𝑃𝑖,𝑘= 𝑐 × τ
其中
𝑃𝑖𝑘:虛擬距離觀測量
c:光速τ:時間延遲量
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
GPS定位原理
10
載波相位觀測量公式
𝐿 𝑇 = 𝐿𝑠 𝑇 − 𝐿𝑟 𝑡
𝐿 𝑇 :載波相位觀測量
𝐿𝑠 𝑇 :T時刻衛星傳送的載波相位
𝐿𝑟 𝑡 :t時刻到達地面接收器的相位
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
網路RTK技術
11
即時動態定位技術(Real Time Kinematic, RTK)係利用一基準站進行GNSS載波相位之量測並將量測量或修正量藉由無線通訊設備傳送至移動站,進行一次差分或二次差分聯合解算後,求得座標。
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
網路RTK技術
12
網路RTK技術係利用採用多個衛星定位基準站所組成的結合GNSS網絡來評估衛星定位基準站涵蓋地區的GPS定位誤差,並配合最鄰近的實體基準站觀測資料,建構一個虛擬基準站做為RTK主站使用。
在台灣,藉由網際網路設備與國土測繪中心連結,取得相關觀測量及改正數,即可求得定位坐標。
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
高斯濾波原理
13
高斯濾波(Gaussian filter)是一種線性平滑濾波,適用於消除雜訊,廣泛應用於圖像、龐大資料的處理。於GPS資料處理中,高斯濾波則對整串資料序列進行加權平均,每一個資料的值,都由其本身和鄰域內的其他值經過加權平均後得到。
window:罩窗寬度ds:罩窗半徑
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
高斯濾波原理
14
假設點資料 𝑥𝑖,𝑦𝑖 ,𝑖 = 1,…,𝑛,𝑥𝑖為橫坐標值,𝑦𝑖為縱坐標值。 𝑖_𝑚𝑎𝑥與𝑖_𝑚𝑖𝑛為程式中給定的罩窗寬度之上下邊界(罩窗寬度),σ(標準偏差)為罩窗寬度的1/6,𝑤𝑘,𝑖 為權重值,𝑤𝑘,𝑖 = 𝑒𝑥𝑝 − 𝑑𝑠 𝜎
2 ,𝑑𝑠 =
𝑥 𝑘 − 𝑥 𝑖
𝑦𝑘 =
𝑖=𝑖_𝑚𝑖𝑛
𝑖=𝑖_𝑚𝑎𝑥
𝑤𝑘,𝑖 × 𝑦 𝑖
𝑖=𝑖_𝑚𝑖𝑛
𝑖=𝑖_𝑚𝑎𝑥
𝑤𝑘,𝑖
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
平均值濾波原理
15
平均法濾波(Average filter)之原理與高斯濾波相似,平均法濾波是對整串資料序列進行局部平均,每筆資料的值都以鄰域內平均值代表之。平均法濾波方程式與高斯濾波,不同處在於參數中的權重值為𝑤𝑘,𝑖=1
𝑦𝑘 =
𝑖=𝑖_𝑚𝑖𝑛
𝑖=𝑖_𝑚𝑎𝑥
𝑦 𝑖 𝑛
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
研究區域
水土保持局南投分局委外之「隙頂集水區」計畫中,提出綜合考慮電力來源問題、崩塌地地形現狀與規模、地表破壞跡象和保全對象等原因,於集水區內選定兩塊崩塌潛勢區。
16研究地區與GPS測站位置示意圖
(a)巃頭地區GPS_11~GPS_15
(b)樂野地區GPS_16~GPS_20
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
研究區域
17
巃頭地區(左)與樂野地區(右)分層設色圖。黑色星號表因資料較完整而採用之GPS測站,白色星號表因資料缺漏較多而不採用之GPS測站,藍色星號表RTK位移監測所選用之點位。
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
GPS-721-MRTU
使用儀器
18
前言 研究方法研究區域
與材料結果與討論 結論與建議
接收儀回傳資料格式
-
使用儀器
GPS固定樁 Trimble R8s
19
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
濾波方法與罩窗寬度之選擇
20
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
濾波方法與罩窗寬度之選擇
21
1. 選擇使用高斯濾波2. 罩窗寬度選擇2880分鐘
y = 2E-07x2 - 0.0011x + 1.6119R² = 0.8255
y = 2E-07x2 - 0.0011x + 1.4893R² = 0.7212
-0.500
0.000
0.500
1.000
1.500
2.000
2.500
0 1000 2000 3000 4000 5000
標準
偏差
(m)
罩窗寬度(min)
東西向座標標準偏差變化
高斯法
平均法
多項式(高斯法)
多項式(平均法)
y = 2E-07x2 - 0.0012x + 2.3184R² = 0.9138
y = 2E-07x2 - 0.0013x + 2.1593R² = 0.8142
0.000
0.500
1.000
1.500
2.000
2.500
3.000
0 1000 2000 3000 4000 5000
標準
偏差
(m)
罩窗寬度(min)
南北向座標標準偏差變化
高斯法
平均法
多項式(高斯法)
多項式(平均法)
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
前言 研究方法研究區域
與材料結果與討論 結論與建議
GPS地表位移監測結果
22
測站 東西向位移(m) 南北向位移(m)
巃頭地區
GPS_11 0.51 -0.26
GPS_12 0.25 0.13
GPS_14 -0.12 0.25
平均 0.21 0.04
樂野地區
GPS_17 0.70 0.56
GPS_18 0.53 0.53
GPS_20 -1.43 0.29
平均 -0.07 0.46
座標值變化圖,以巃頭地區GPS_14為例(使用罩窗寬度2880分鐘高斯濾波過後)
-
-0.06
-0.04
-0.02
0
0.02
0.04
2017/6/14 2017/9/22 2017/12/31 2018/4/10
南北
向座
標值
變化
(m)
日期
樂野地區網路RTK位移成果(南北向)
點位6 點位7 點位8 點位9 點位10
網路RTK地表位移監測結果
23
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
2017/6/14 2017/9/22 2017/12/31 2018/4/10東西
向座
標值
變化
(m)
日期
巃頭地區網路RTK位移成果(東西向)
點位1 點位2 點位3 點位4 點位5
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
2017/6/14 2017/9/22 2017/12/31 2018/4/10
座標
軸標
題
座標軸標題
巃頭地區網路RTK位移成果(南北向)
點位6 點位7 點位8 點位9 點位10
-0.06
-0.04
-0.02
0
0.02
0.04
2017/6/14 2017/9/22 2017/12/31 2018/4/10東西
向座
標值
變化
(m)
日期
樂野地區網路RTK位移成果(東西向)
點位1 點位2 點位3 點位4 點位5
平均:-4cm 平均:-0.5cm
平均:0.8cm 平均:0.3cm
兩塊研究區大致朝西北西相位移。
2017年11月24日之測量結果與整體移動趨勢相悖,點位有朝東南方向移動之現象,此乃2017年11月22日嘉義縣阿里山鄉發生芮氏規模5.5的有感地震,進而使研究區短時間產生少量地表位移。
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
網路RTK地表位移監測結果
24
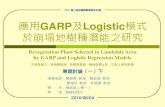
2005-2012年台灣GPS 連續觀測站相對於澎湖白沙之地殼水平運動速度場
紅色星形(巃頭地區)與黃色星形(樂野地區)處呈西北西方向之水平運動,此移動趨勢為板塊運動所致,而網路RTK監測位移成果與之一致。
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
雨量與位移之關係
25
為觀察雨量多寡是否影響座標位移變化,吾人計算7/29至8/3多雨期間座標值之標準差,與整體監測時間之標準差作比較。
結果顯示雨量多寡並不影響本研究座標位移變化。
測站東西向
標準差(7/29-8/3)
南北向標準差(7/29-
8/3)
東西向標準差(整體)
南北向標準差(整體)
GPS_11 0.17 0.22 0.72 0.76
GPS_12 0.20 0.22 0.48 0.80
GPS_14 0.23 0.20 0.32 0.66
GPS_17 0.24 0.28 0.62 0.97
GPS_18 0.14 0.27 0.44 0.59
GPS_20 0.47 0.31 0.81 0.84
單位:公尺
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
各測站間之相關性
26
巃頭地區高斯濾波罩窗寬度2880分鐘各測站間相關係數
東西向
GPS_11 GPS_12 GPS_14GPS_11 0.38 0.13
GPS_12 0.38 0.42
GPS_14 0.13 0.42南北向
GPS_11 GPS_12 GPS_14GPS_11 0.53 0.56GPS_12 0.53 0.74GPS_14 0.56 0.74
樂野地區高斯濾波罩窗寬度2880分鐘各測站間相關係數
東西向
GPS_17 GPS_18 GPS_20GPS_17 0.42 -0.34
GPS_18 0.42 -0.12
GPS_20 -0.34 -0.12南北向
GPS_17 GPS_18 GPS_20GPS_17 0.47 0.43
GPS_18 0.47 0.57GPS_20 0.43 0.57
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
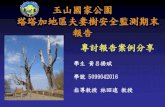
相對誤差成果-方法一
27
原始資料中第一筆資料視為原點,而後續資料序列皆減去第一筆資料,計算之相對誤差如下,結果表明兩研究區並無明顯系統誤差累積現象。
。
方法一 GPS_14之相對誤差成果 方法一 GPS_18之相對誤差成果
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
相對誤差成果-方法二
28
監測期間內每天收到之第一筆資料皆視為原點,後將原始資料中每筆資料,分別減去該天第一筆接收到之資料。
方法二 GPS_14之相對誤差成果 方法二 GPS_18之相對誤差成果
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
29
結論與建議
1. 本研究以低價單頻GPS接收儀(型號GPS-721-MRTU)與網路RTK技術,於兩塊崩塌潛勢區–巃頭地區與樂野地區,實施長期地表位移監測。
2. 最適合本研究之濾波方式為罩窗寬度2880分鐘之高斯濾波。
3. 各GPS測站座標序列進行線性迴歸,計算出觀測時間內之位移量,其位移達數十公分,本研究雨量並不影響位移成果。
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
30
結論與建議
4. 以網路RTK技術監測地表位移,發現兩塊研究區皆有朝西北西方向移動之趨勢,與板塊運動造成之位移趨勢相符。而芮氏規模5.5地震導致位移也被網路RTK監測方法捕捉。
5. 研究區朝西北西方向水平移動,與板塊運動方向有關,而研究區域之坡向主要為東南向與南向,由此可證明研究區域於觀測期間並無地滑現象發生。
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
31
結論與建議
6. GPS-721-MRTU為低價之單頻GPS接收儀,在水平精度上面雖不盡理想,但在定位方面仍有週期性變化,若把觀測時間延長,此接收儀將有助於在GPS時間序列週期變化或大氣科學等方面的研究。
7. 相對誤差方法一說明監測成果並無明顯系統誤差積累現象。方法二則發現此GPS接收儀座標時間序列有周期性波動變化現象,且呈東南方向與西北方向相互循環。
前言 研究方法研究區域
與材料結果與討論 結論與建議
-
敬請斧正
32