로봇공학(Robotics) : Introductionmercury.kau.ac.kr/sjkwon/Lecture/robotics/Robotics... ·...
36
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon 로봇공학, Chapter 2 Instructor: 권 상 주 한국항공대학교 항공우주및기계공학부 (E-mail) [email protected] http://mercury.kau.ac.kr/sjkwon 1 로봇공학(Robotics) : Introduction
Transcript of 로봇공학(Robotics) : Introductionmercury.kau.ac.kr/sjkwon/Lecture/robotics/Robotics... ·...
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
Instructor: 권 상 주
한국항공대학교 항공우주및기계공학부
(E-mail) [email protected]
http://mercury.kau.ac.kr/sjkwon
1
로봇공학(Robotics): Introduction

2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
강의계획서
2

2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
강의계획서
3
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
로봇의역사와정의
역사
Robot의 어원 – 체코의 카렐 챠베크의 희극소설에서사용한
체코어 Robota에서유래, 1920
최초의 산업용 로봇 – Unimation사의 Unimate, 1960
최초의 Humanoid - ASIMO (Advanced Step in Innovative
Mobility), 2000
정의
움직이는 모든 것
Motion and/or force with intelligence
인간과 작업/환경을 연결하는 Mechatronic Interface
• Webster says: “An automatic device that performs functions normally ascribed to humans or a machine in the form of a human.”
4
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
History of Robotics
5
1922: Karel Čapek’s novel, Rossum’s Universal Robots, word “Robota”
(worker)
1952: NC machine (MIT)
1955: Denavit-Hartenberg Homogeneous Transformation
1967: Mark II (Unimation Inc.)
1968: Shakey (SRI) - intelligent robot
1973: T3 (Cincinnati Milacron Inc.)
1978: PUMA (Unimation Inc.)
1983: Robotics Courses
21C: Walking Robots, Mobile Robots, Humanoid Robots
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
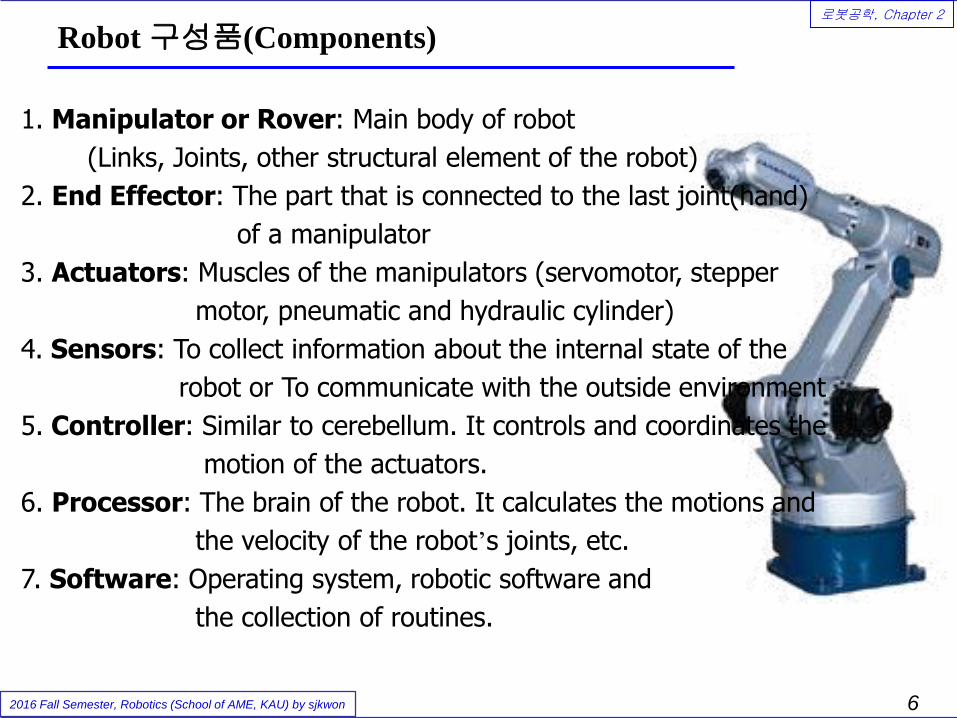
Robot 구성품(Components)
6
1. Manipulator or Rover: Main body of robot
(Links, Joints, other structural element of the robot)
2. End Effector: The part that is connected to the last joint(hand)
of a manipulator
3. Actuators: Muscles of the manipulators (servomotor, stepper
motor, pneumatic and hydraulic cylinder)
4. Sensors: To collect information about the internal state of the
robot or To communicate with the outside environment
5. Controller: Similar to cerebellum. It controls and coordinates the
motion of the actuators.
6. Processor: The brain of the robot. It calculates the motions and
the velocity of the robot’s joints, etc.
7. Software: Operating system, robotic software and
the collection of routines.
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
7
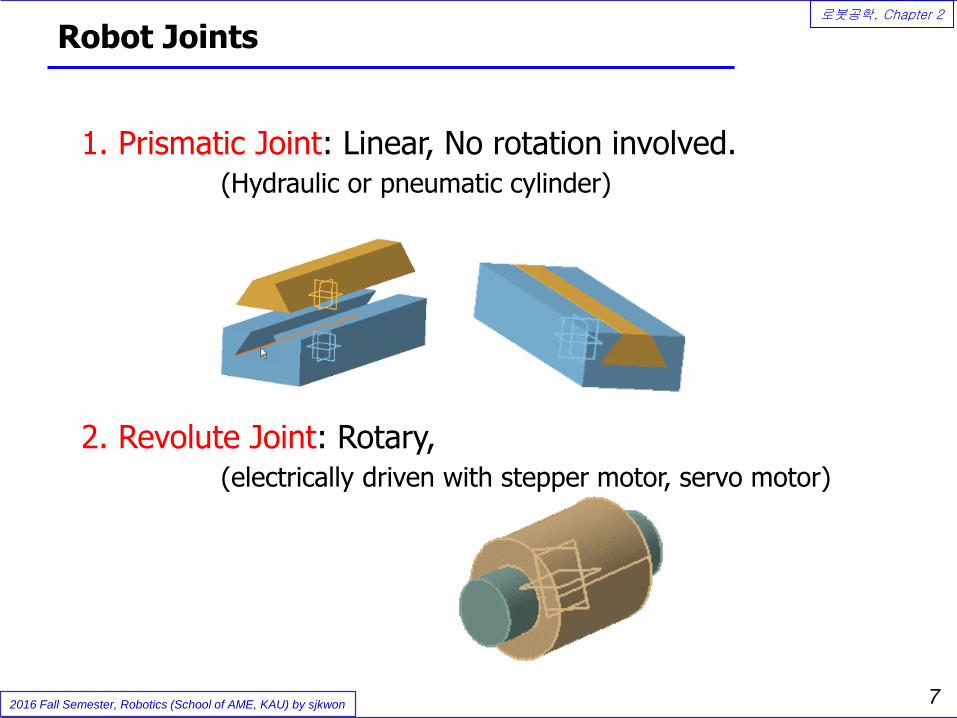
1. Prismatic Joint: Linear, No rotation involved.(Hydraulic or pneumatic cylinder)
2. Revolute Joint: Rotary,(electrically driven with stepper motor, servo motor)
Robot Joints
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
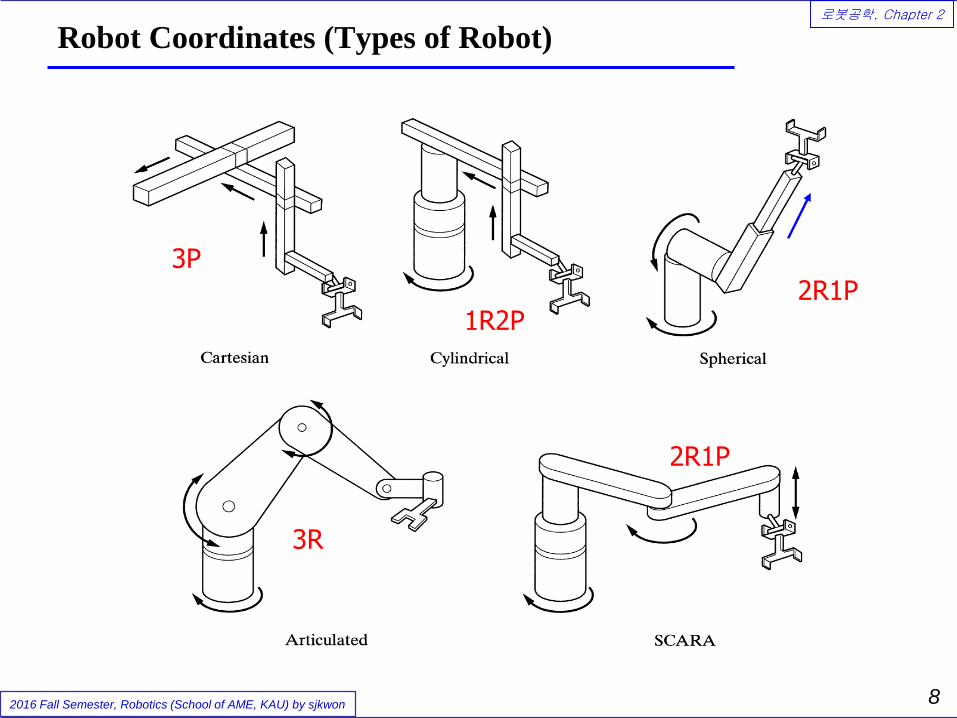
Robot Coordinates (Types of Robot)
8
3P
1R2P2R1P
3R
2R1P
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
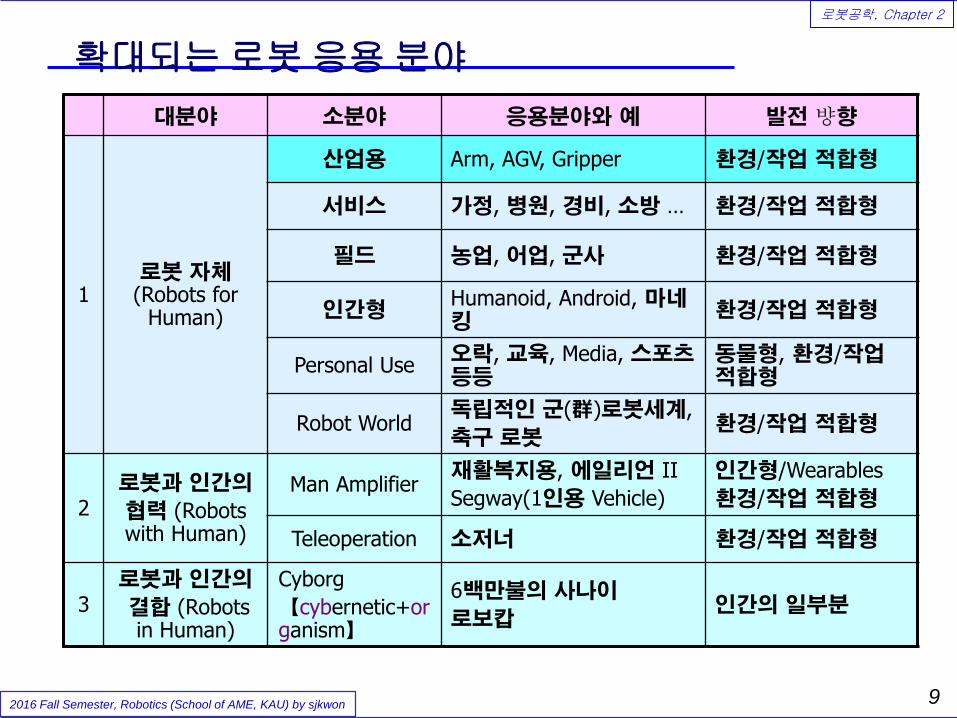
확대되는로봇응용분야
9
대분야 소분야 응용분야와 예 발전 뱡향
1로봇 자체
(Robots for Human)
산업용 Arm, AGV, Gripper 환경/작업 적합형
서비스 가정, 병원, 경비, 소방 … 환경/작업 적합형
필드 농업, 어업, 군사 환경/작업 적합형
인간형Humanoid, Android, 마네킹
환경/작업 적합형
Personal Use오락, 교육, Media, 스포츠등등
동물형, 환경/작업적합형
Robot World독립적인 군(群)로봇세계,
축구 로봇환경/작업 적합형
2로봇과 인간의
협력 (Robots with Human)
Man Amplifier재활복지용, 에일리언 II
Segway(1인용 Vehicle)
인간형/Wearables
환경/작업 적합형
Teleoperation 소저너 환경/작업 적합형
3로봇과 인간의
결합 (Robots in Human)
Cyborg
【cybernetic+organism】
6백만불의 사나이
로보캅인간의 일부분
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
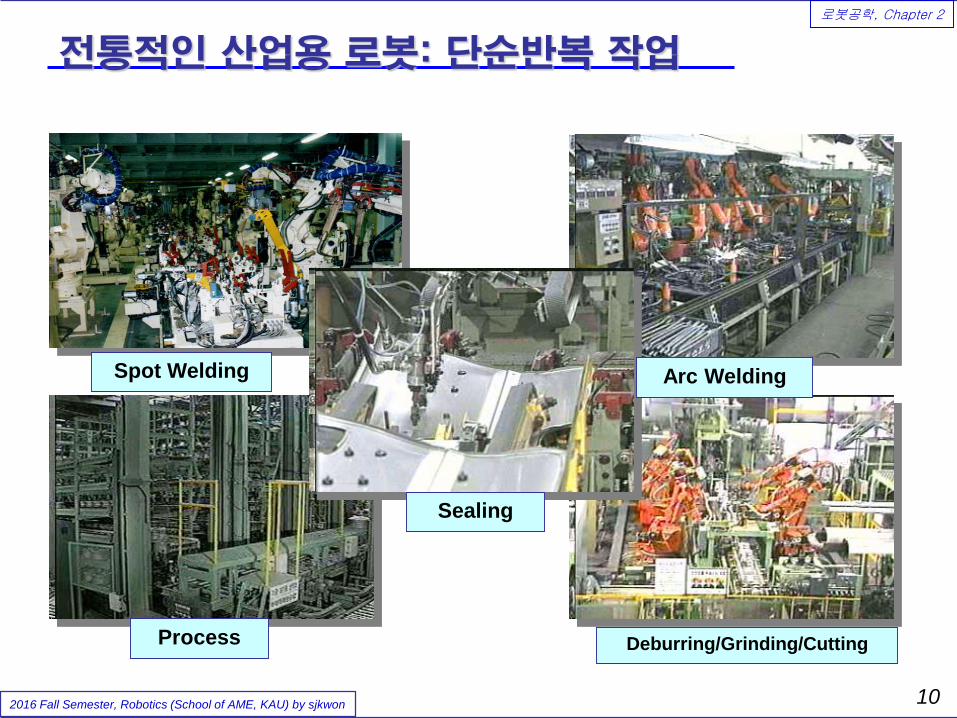
10
Arc Welding
Process Deburring/Grinding/Cutting
Sealing
Spot Welding
전통적인 산업용 로봇: 단순반복 작업
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
11
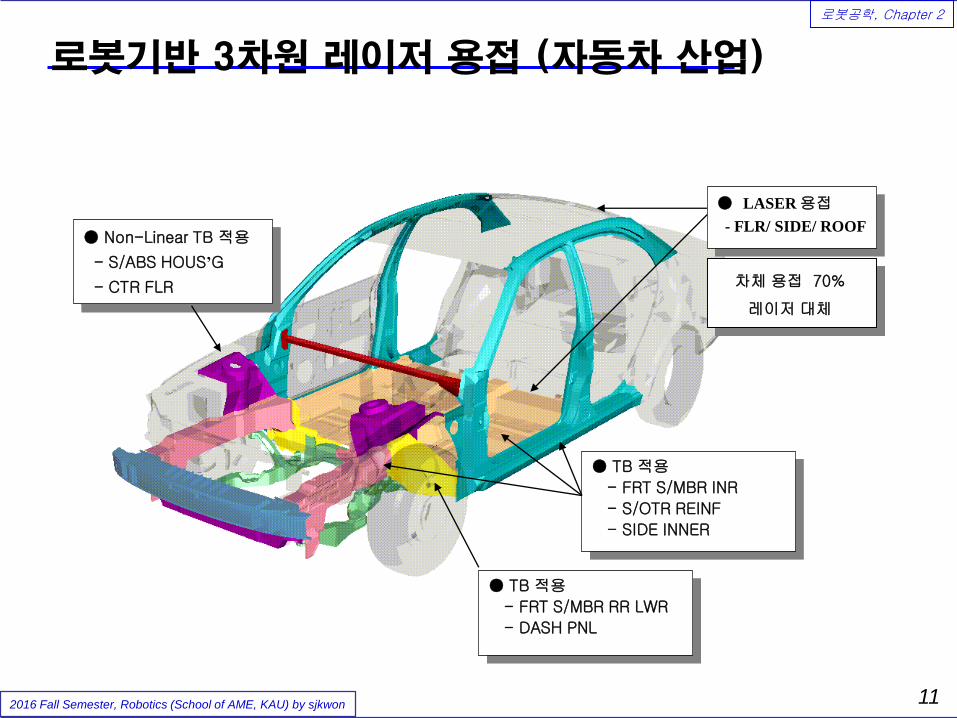
로봇기반 3차원 레이저 용접 (자동차 산업)
● TB 적용
- FRT S/MBR INR
- S/OTR REINF
- SIDE INNER
● TB 적용
- FRT S/MBR RR LWR
- DASH PNL
● Non-Linear TB 적용
- S/ABS HOUS’G
- CTR FLR
● LASER 용접
- FLR/ SIDE/ ROOF
차체용접 70%
레이저대체

2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
로봇산업의패러다임변화
12
산업용 로봇(제조업 용)
차세대 로봇
1980(1세대) 1990(2세대) 2000(3세대)
21세기는 인간 공존형 로봇의 시대
비제조업용 로봇(건설, 의료/복지,
농업, 원자력, 전기가스 등.)
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
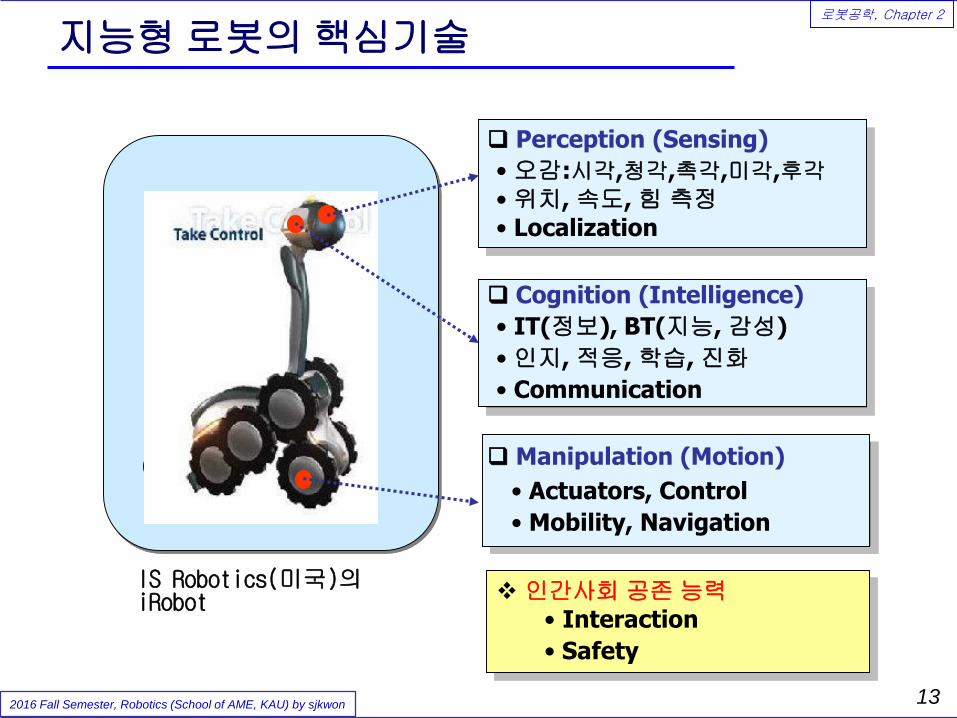
지능형로봇의핵심기술
13
Cognition (Intelligence)
• IT(정보), BT(지능, 감성)
• 인지, 적응, 학습, 진화
• Communication
• 오감:시각,청각,촉각,미각,후각
• 위치, 속도, 힘 측정• Localization
Manipulation (Motion)
• Actuators, Control
• Mobility, Navigation
IS Robotics(미국)의iRobot
Perception (Sensing)
인간사회공존능력• Interaction
• Safety
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
Minerva (미국 CMU)
14
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
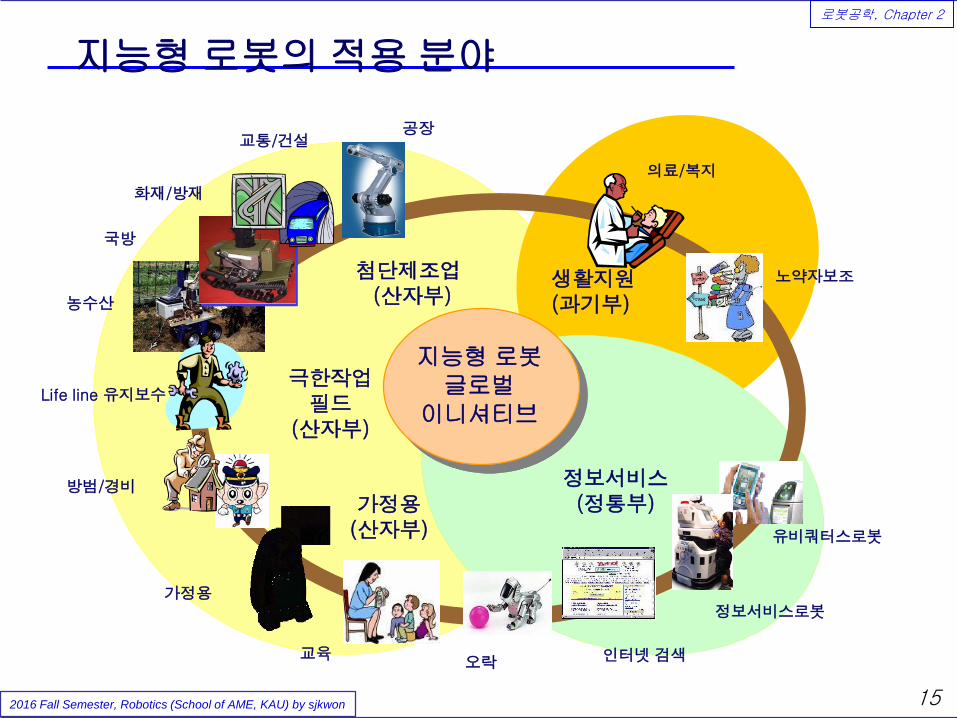
지능형로봇의적용분야
15
공장교통/건설
화재/방재
국방
농수산
Life line 유지보수
방범/경비
가정용
교육오락 인터넷 검색
정보서비스로봇
유비쿼터스로봇
노약자보조
의료/복지
생활지원(과기부)
첨단제조업(산자부)
극한작업필드
(산자부)
가정용(산자부)
정보서비스(정통부)
지능형로봇글로벌
이니셔티브
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
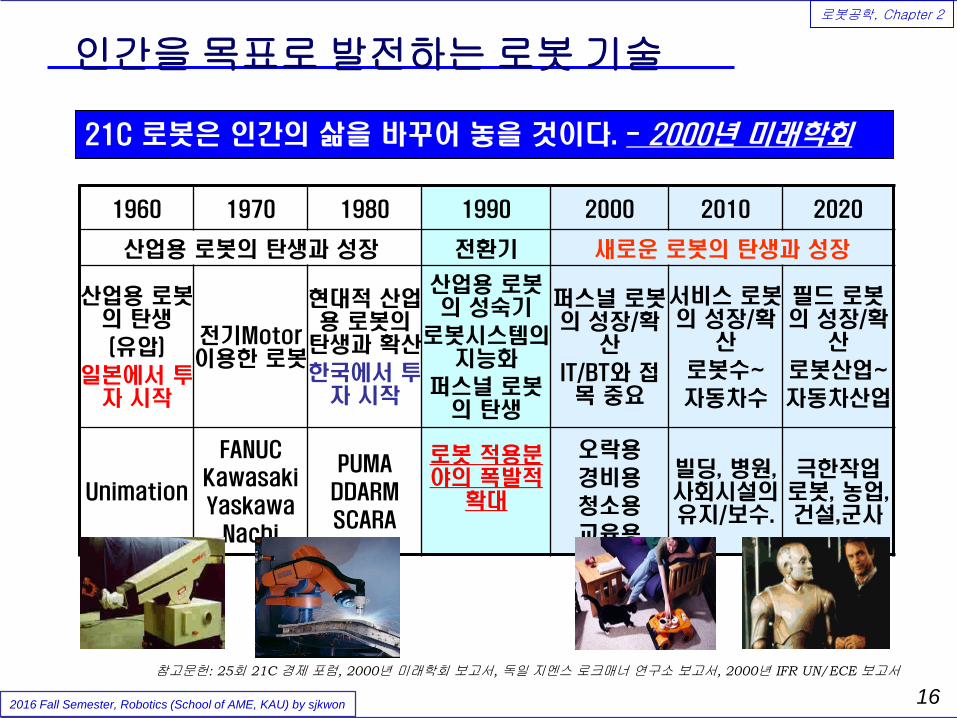
인간을목표로발전하는로봇기술
16
1960 1970 1980 1990 2000 2010 2020
산업용 로봇의 탄생과 성장 전환기 새로운 로봇의 탄생과 성장
산업용 로봇의 탄생
(유압)
일본에서 투자 시작
전기Motor 이용한 로봇
현대적 산업용 로봇의탄생과 확산
한국에서 투자 시작
산업용 로봇의 성숙기
로봇시스템의지능화
퍼스널 로봇의 탄생
퍼스널 로봇의 성장/확
산
IT/BT와 접목 중요
서비스 로봇의 성장/확
산
로봇수~
자동차수
필드 로봇의 성장/확
산
로봇산업~
자동차산업
Unimation
FANUC
Kawasaki
Yaskawa
Nachi
PUMA
DDARM
SCARA
로봇 적용분야의 폭발적
확대
오락용
경비용
청소용
교육용
빌딩, 병원, 사회시설의유지/보수.
극한작업로봇, 농업,건설,군사
21C 로봇은 인간의 삶을 바꾸어 놓을 것이다. - 2000년 미래학회
참고문헌: 25회 21C 경제 포럼, 2000년 미래학회 보고서, 독일 지멘스 로크매너 연구소 보고서, 2000년 IFR UN/ECE 보고서
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
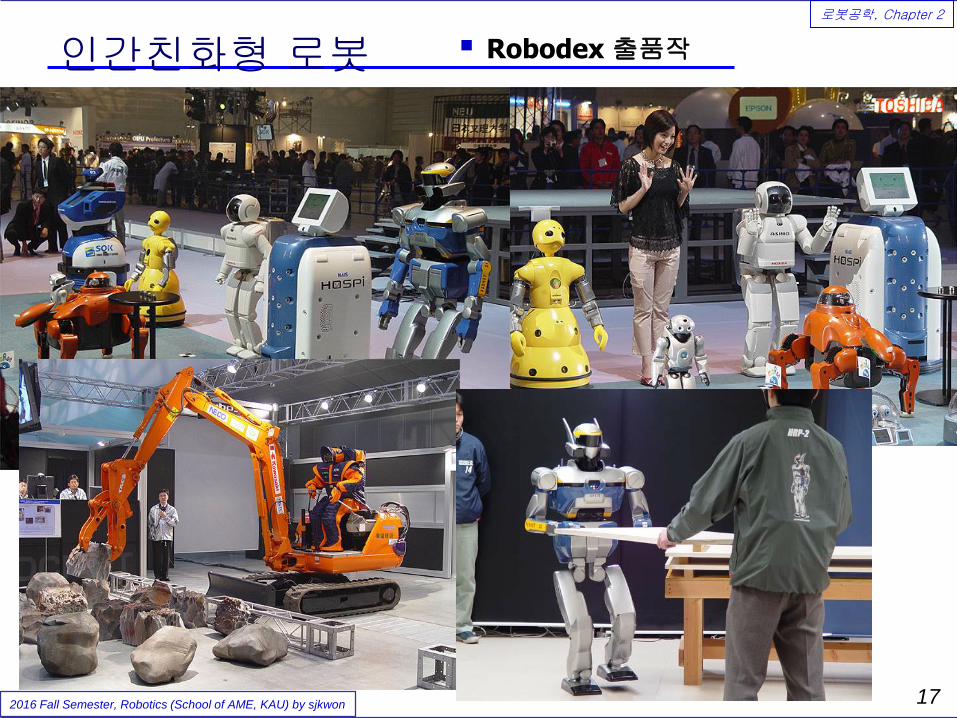
인간친화형 로봇 Robodex 출품작
17
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
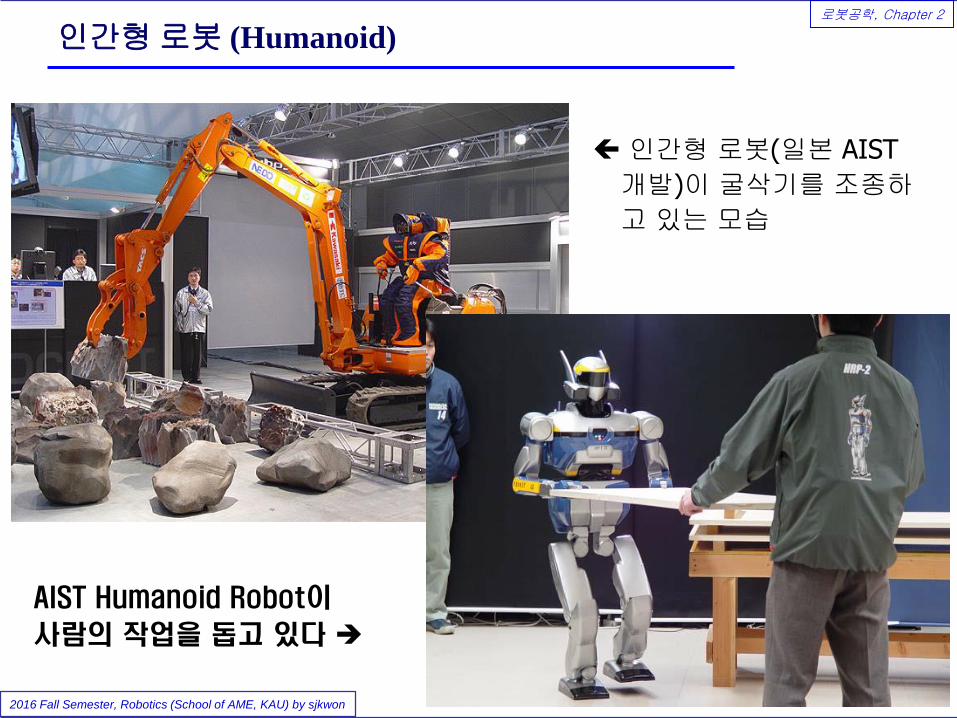
인간형로봇 (Humanoid)
인간형 로봇(일본 AIST
개발)이 굴삭기를 조종하
고 있는 모습
18
AIST Humanoid Robot이
사람의 작업을 돕고 있다
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
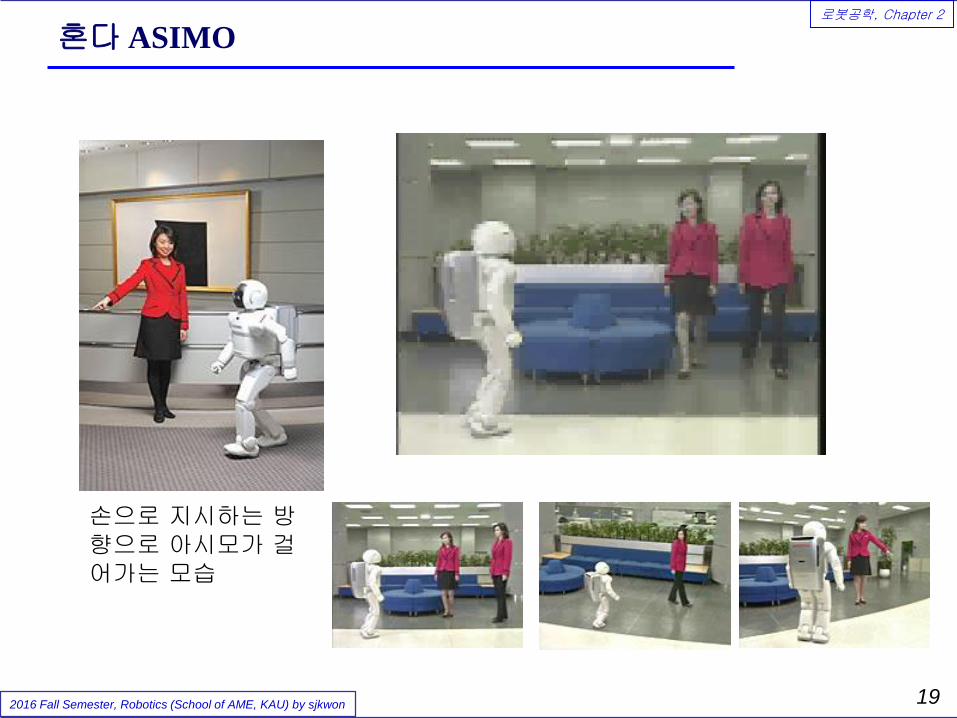
혼다 ASIMO
19
손으로 지시하는 방향으로 아시모가 걸어가는 모습
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
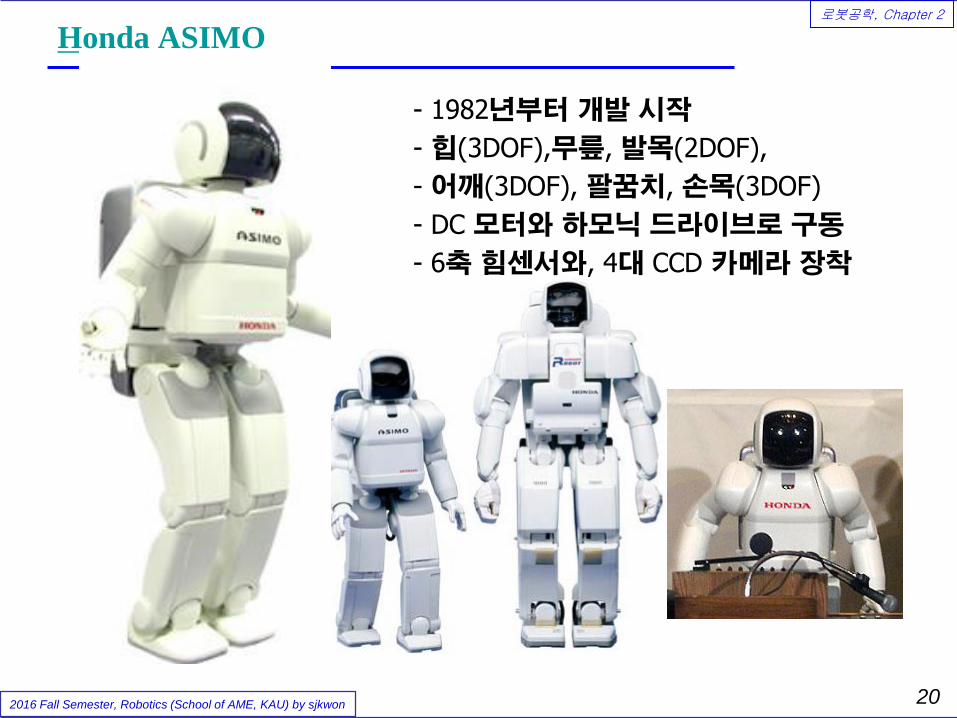
Honda ASIMO
20
- 1982년부터 개발 시작
- 힙(3DOF),무릎, 발목(2DOF),
- 어깨(3DOF), 팔꿈치, 손목(3DOF)
- DC 모터와 하모닉 드라이브로 구동
- 6축 힘센서와, 4대 CCD 카메라 장착

2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
오락용로봇 (Entertainment Robot)
애완견 로봇 아이보 (SONY)
머리, 몸통, 네다리, 꼬리 모듈로 구성
기쁨, 슬픔, 성남, 놀람, 두려움, 싫어
함의 6가지 감정 표현
넘어져도 스스로 일어날 수 있음
21
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
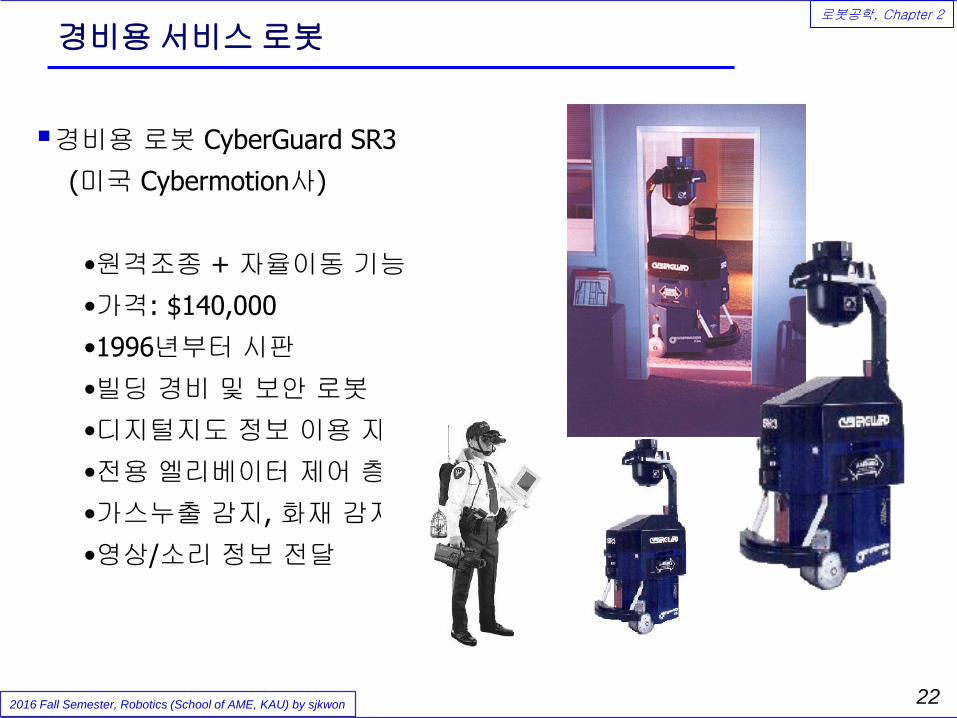
경비용서비스로봇
경비용 로봇 CyberGuard SR3
(미국 Cybermotion사)
•원격조종 + 자율이동 기능
•가격: $140,000
•1996년부터 시판
•빌딩 경비 및 보안 로봇
•디지털지도 정보 이용 자동 항법
•전용 엘리베이터 제어 층간 이동
•가스누출 감지, 화재 감지
•영상/소리 정보 전달
22

2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
극한작업용로봇
23
극지 탐사 로봇(CMU)
화성 탐사 로봇 소저너 (NASA/JPL)
원전 투입 로봇 Pioneer(체르노빌 탐사)
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
모바일로봇의핵심문제
1. 자기 위치 인식 (Localization)
• 로봇 내부센서 이용 방법 (Odometer, INS, Gyro)
• 외부 표식 및 센서 이용 방법 (Land mark, GPS)
2. 외부 환경 인식 (Environment Recognition)
• 초음파센서, 카메라, 레이저 파인더, 적외선 센서
3. 자율 주행 (Navigation)
• 외부 물체와의 간섭 회피 경로로 로봇 이동
4. 작업기능 구현 (Object Handling)
24
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
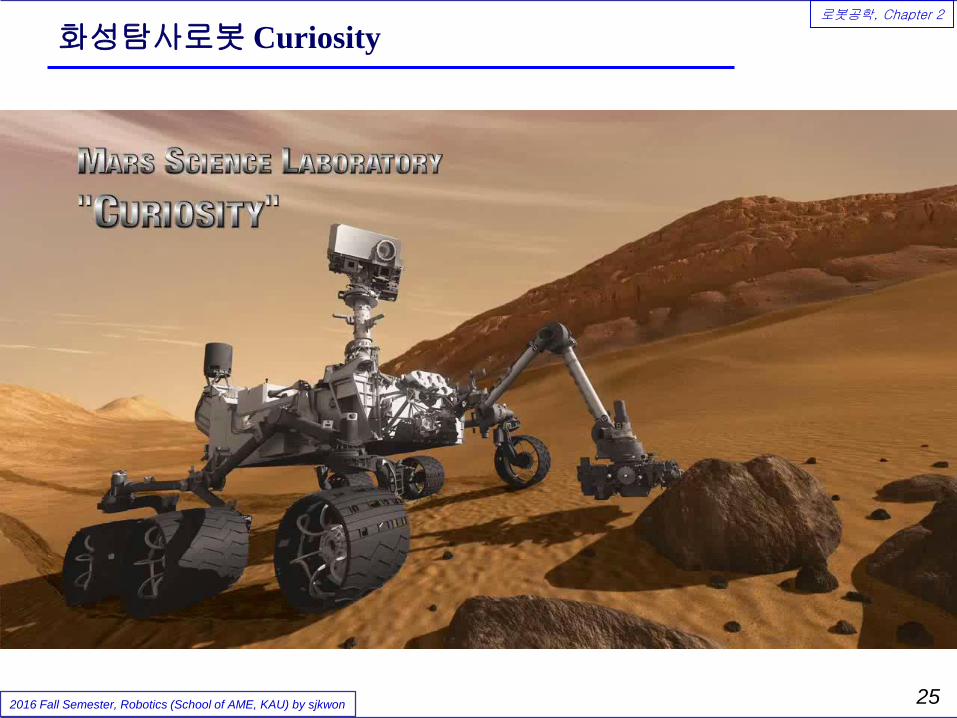
화성탐사로봇 Curiosity
25
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
로봇자동차 Google Car
26
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
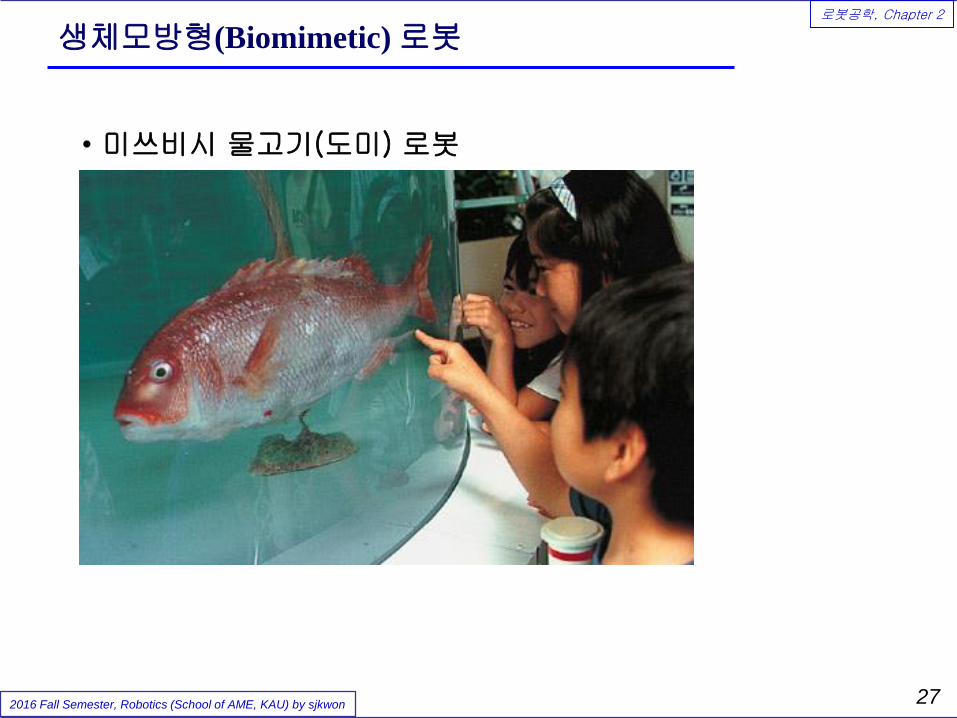
생체모방형(Biomimetic) 로봇
27
• 미쓰비시 물고기(도미) 로봇
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
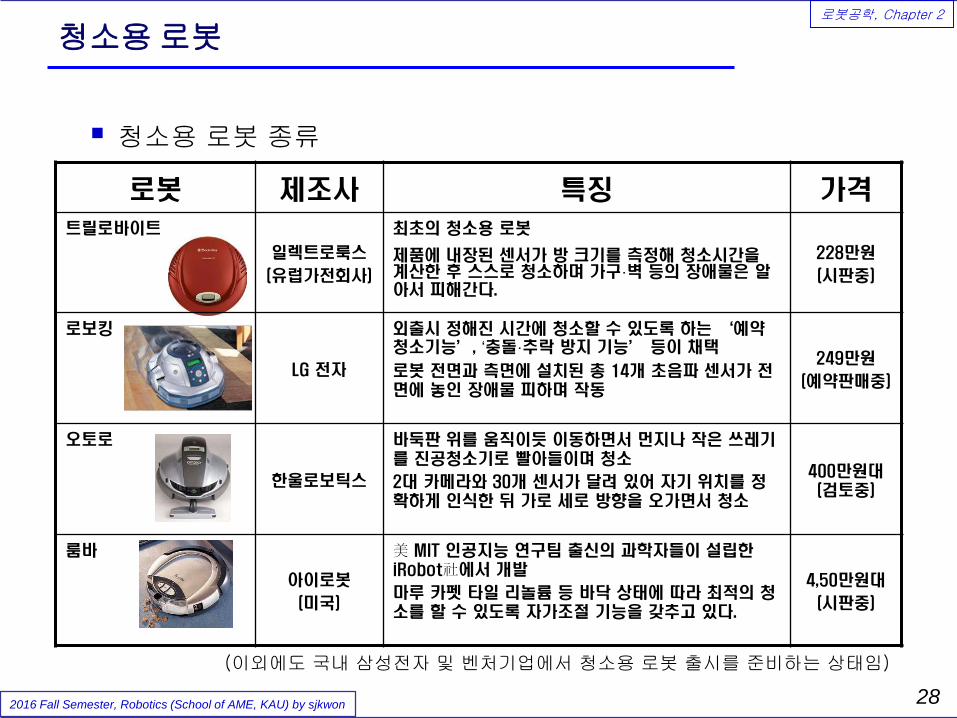
청소용로봇
청소용 로봇 종류
28
로봇 제조사 특징 가격
트릴로바이트
일렉트로룩스
(유럽가전회사)
최초의 청소용 로봇
제품에 내장된 센서가 방 크기를 측정해 청소시간을계산한 후 스스로 청소하며 가구·벽 등의 장애물은 알아서 피해간다.
228만원
(시판중)
로보킹
LG 전자
외출시 정해진 시간에 청소할 수 있도록 하는 ‘예약청소기능’, ‘충돌·추락 방지 기능’ 등이 채택
로봇 전면과 측면에 설치된 총 14개 초음파 센서가 전면에 놓인 장애물 피하며 작동
249만원
(예약판매중)
오토로
한울로보틱스
바둑판 위를 움직이듯 이동하면서 먼지나 작은 쓰레기를 진공청소기로 빨아들이며 청소
2대 카메라와 30개 센서가 달려 있어 자기 위치를 정확하게 인식한 뒤 가로 세로 방향을 오가면서 청소
400만원대(검토중)
룸바
아이로봇
(미국)
美 MIT 인공지능 연구팀 출신의 과학자들이 설립한iRobot社에서 개발
마루 카펫 타일 리놀륨 등 바닥 상태에 따라 최적의 청소를 할 수 있도록 자가조절 기능을 갖추고 있다.
4,50만원대
(시판중)
(이외에도 국내 삼성전자 및 벤처기업에서 청소용 로봇 출시를 준비하는 상태임)
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
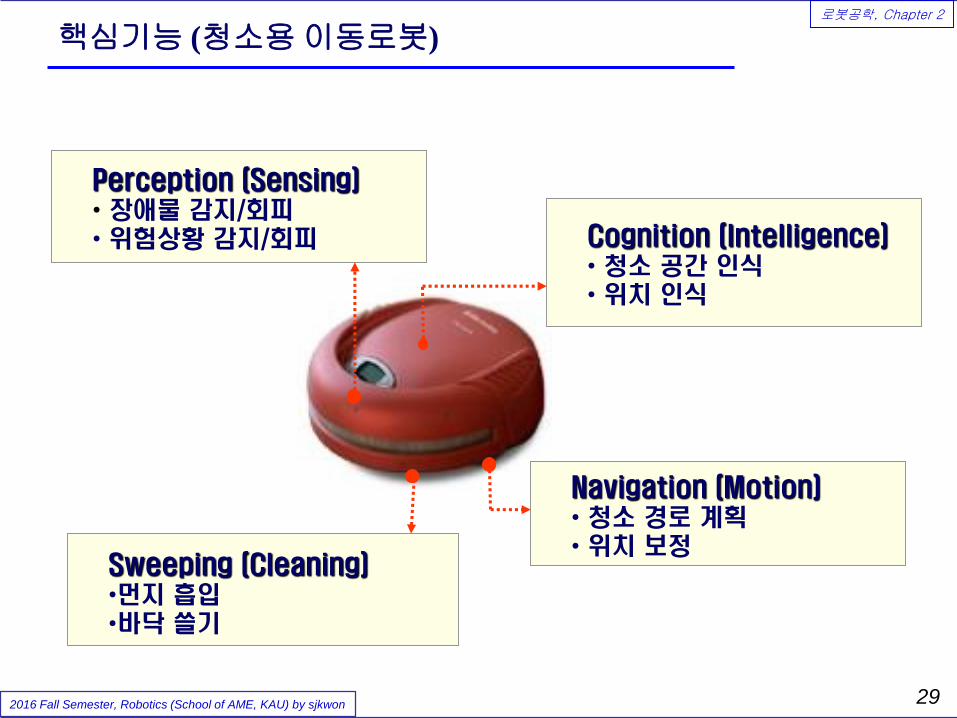
핵심기능 (청소용이동로봇)
29
Navigation (Motion)• 청소 경로 계획• 위치 보정
Cognition (Intelligence)• 청소 공간 인식• 위치 인식
Perception (Sensing)• 장애물 감지/회피• 위험상황 감지/회피
Sweeping (Cleaning) •먼지 흡입•바닥 쓸기
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
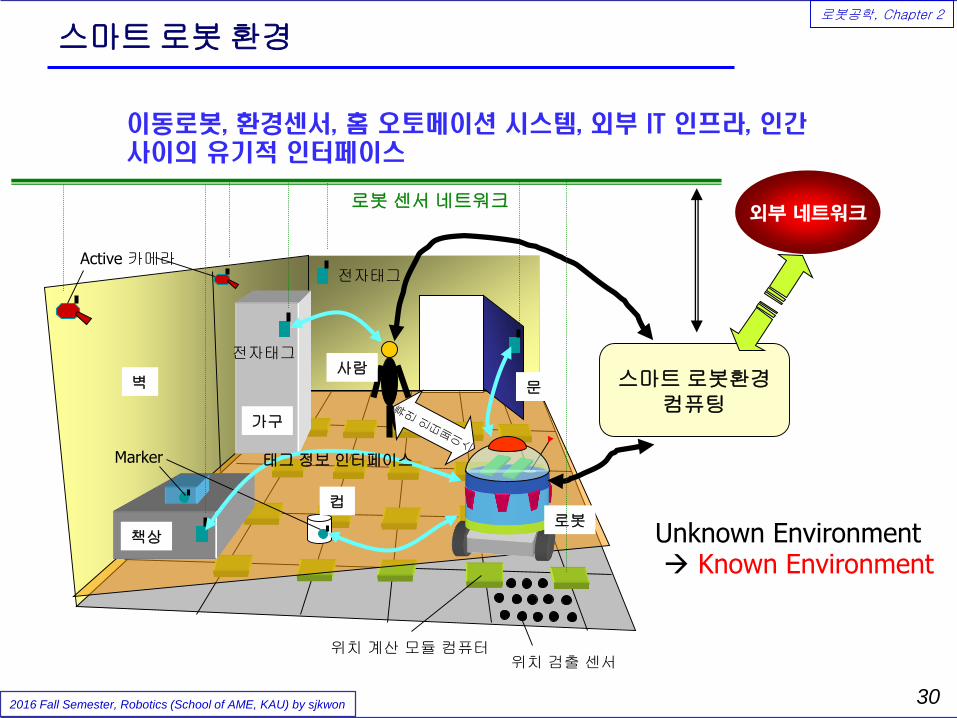
스마트로봇환경
30
스마트로봇환경컴퓨팅
외부 네트워크
위치 검출 센서위치 계산 모듈 컴퓨터
로봇
사람
가구
책상
벽 문
컵
Active 카메라
로봇센서네트워크
Marker 태그정보인터페이스
이동로봇, 환경센서, 홈 오토메이션 시스템, 외부 IT 인프라, 인간사이의 유기적 인터페이스
Unknown Environment Known Environment
전자태그
전자태그

2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
31
생체 모방 flapping로봇(엔터몹터)
비행 로봇(Hovering Robot)
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
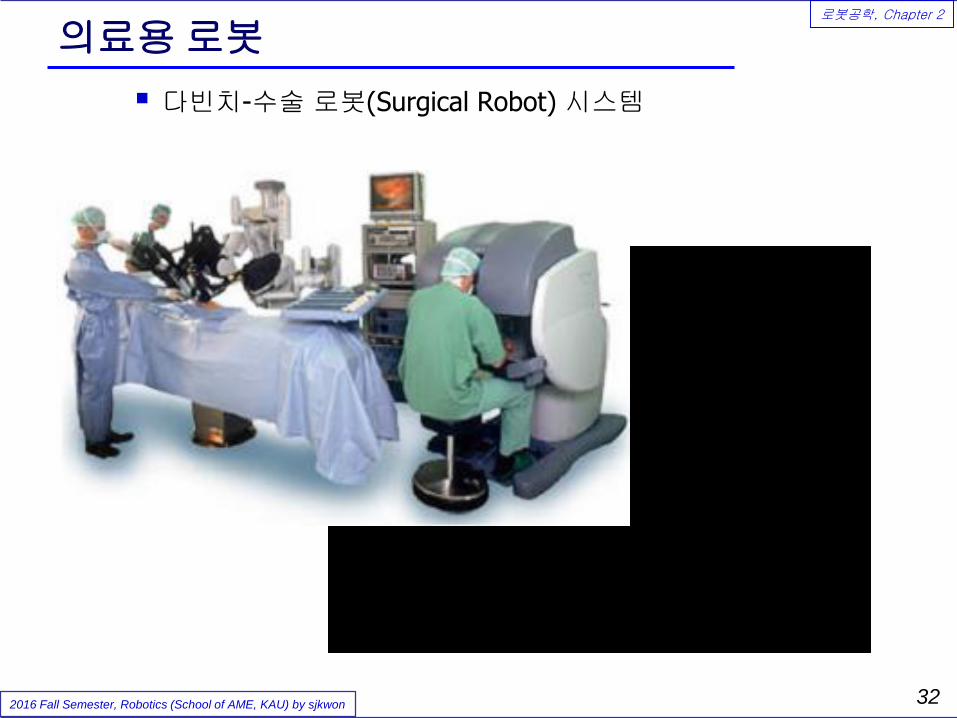
의료용로봇
다빈치-수술 로봇(Surgical Robot) 시스템
32
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
로봇공학과목의개요
로봇공학 과목의 목적:
다관절형 로봇 매니퓰레이터에 대한 로봇기구학 해석 및 동역학 모델링
방법을 학습한다.
로봇 제어를 위해서 요구되는 경로계획, 피드백 제어기 구성 및 로봇 운
동 시뮬레이션 방법을 학습한다.
또한 로봇 제작에 사용되는 센서와 구동기 및 비전시스템 등에 대하여
소개한다.
본 과목을 통하여 향후 로봇공학 또는 제어 및 메카트로닉스 분야에서
활약하고자 하는 학생들에게 필수 기본지식과 연구 동기를 제공한다.
로봇 시뮬레이션을 위해서는 Matlab(또는 MFC)를 활용한다 .
과제 계획
특정 Robot Arm의 기구학 솔류션 구하기
주어진 궤적을 추종하는 로봇제어 시뮬레이션 프로그래밍
33
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
34
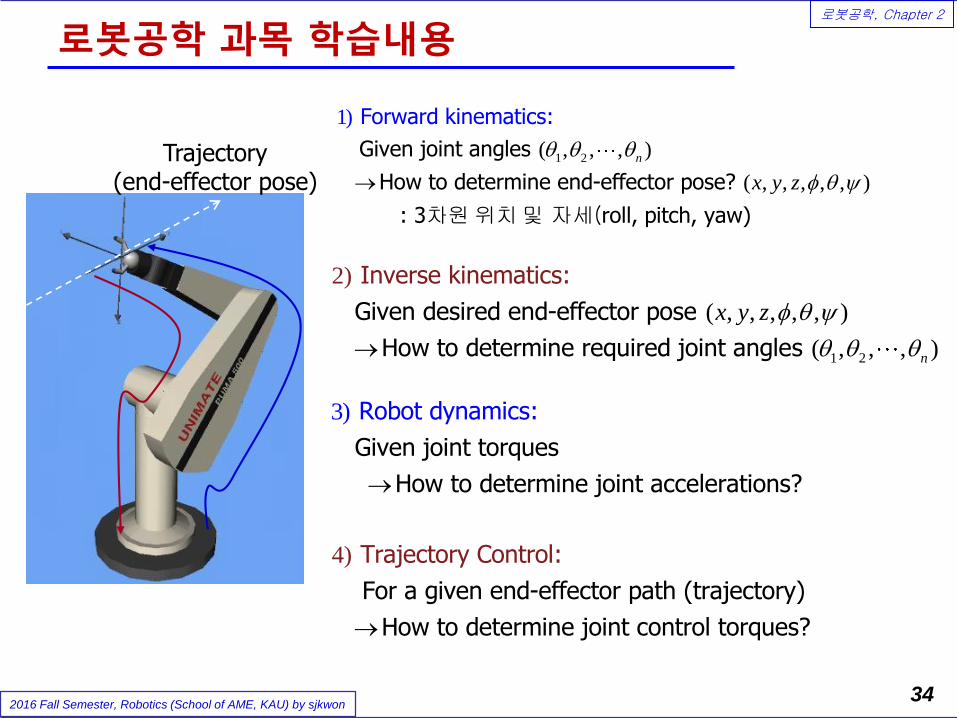
로봇공학 과목 학습내용
1 2
( , , ,
2
, , )
( , , ,
)
)n
x y z
Inve
Given desired end-effector pose
How to determine required joint angle
r
s
se kinematics
:
1 2( , , , )
( , ,
1)
, , , )
n
x y z
Given joint angles
How to determine
Forward kinematics:
end-effector pose?
: 3 roll, pitch,
yaw)
차원위치및 자세(
3)
Given joint torques
How to determine
Rob
join
ot dynamics:
t accelerati
ons?
4)
For a given end-effector path (trajectory)
How to determine joi
n
Trajectory Contro
t control tor
l:
ques?
Trajectory(end-effector pose)
2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
35
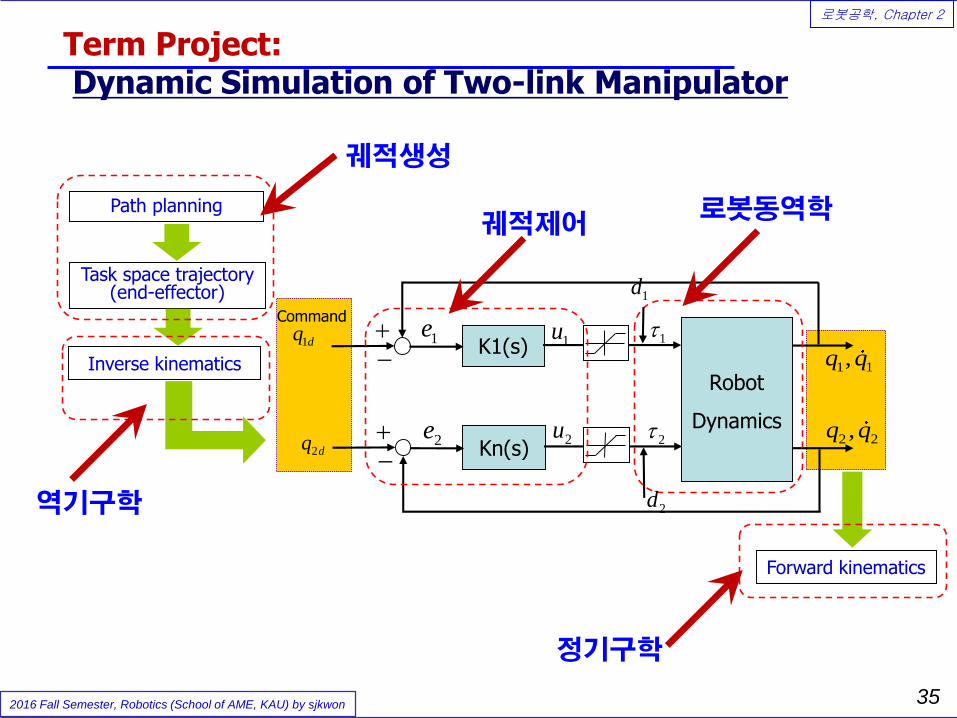
Term Project:Dynamic Simulation of Two-link Manipulator
Robot
Dynamics
K1(s)1
Command
dq
1 1,q q1e 1u
Kn(s)2e
2dq 2u 2 2,q q
Task space trajectory(end-effector)
Inverse kinematics
Path planning
Forward kinematics
1
1d
2
2d
정기구학
역기구학
로봇동역학궤적제어
궤적생성

2016 Fall Semester, Robotics (School of AME, KAU) by sjkwon
로봇공학, Chapter 2
Military Robot 빅독(Big Dog)
36