Raspberry piでシリアルサーボ
16
Raspberry Piでシリアルサーボ システム工学郡3年 山本達也
-
Upload
tatsuya-yamamoto -
Category
Technology
-
view
123 -
download
1
Transcript of Raspberry piでシリアルサーボ

Raspberry Piでシリアルサーボ
システム工学郡3年 山本達也

はじめに
•本当は画像処理をする予定でしたん
• カメラがちゃんと動かなかったので断念

Raspberry Piとは?
• $35で買えるお手軽PC
• CPUはARM11 700MHz
• メモリ 512MB
• SDカードからOS読み込み
• OSはubuntuベースのrasbian
• IO操作ができる
良く言うと超高スペックなマイコン、悪く言うと低スペックなPC

シリアルサーボとは?
•近藤科学が出しているサーボモータに付属するシリアル通信ができるモデルのサーボ。
•基本的にPWMも対応している。
•時代によって、ICS1.0~ICS3.5と規格が変わっていった。
•規格としては一線式UARTになっている。

UARTとは?
• UART (Universal Asynchronous Receiver Transmitter)とはシリアル通信の方式の一つである。ユーアートって読むらしい。
•似ている規格(ほぼ同じ?)としてRS-232CやUSARTやLINなどいろいろありますん。
• スタートビットでデータの送信を開始し、ストップビットで送信を終了する。

Raspberry PiでUART
•方法1• レジスタをたたく
• いろいろめんどい、だが高速
•方法2• WiringPiというライブラリを使用する ←採用
• GPIO,PWM,I2C,SPI,UART,LCDのライブラリがあり、お手軽

WiringPiのインストール
• Raspberry PiにRasbianが乗っていることが前提。Rasbian以外で動くかは知らないです。
•下のコマンドをターミナル上で実行(クローンしてビルド)
$ git clone git://git.drogon.net/wiringPi
$ cd wiringPi
$ ./build
これでおk!

WiringPiの使用方法
• Sample見たらわかるよん。
• GitHubにもそのうちあげますん。

ICS3.5の規格
•通信条件• 通信速度 115200bps(default), 625000bps, 1.25Mbps
• ビット長 8bit
• スタート 1bit
• ストップ 1bit
• フロー制御無し
• パリティ EVEN(偶数)
•送信コマンドのループバック、マルチドロップ接続
• シリアル通信モードへの移行• 電源投入時に信号線を500mS間、Hレベルに保つことで通信が可能になる。
• LレベルにするとPWMモードに移行する。

Raspberry Piで一線式UART
• とりあえず、RxとTxをつないでみた• →動かないのん
• つないでプルアップしてみた• →動かないのん

Raspberry Piで一線式UART
• とりあえず、RxとTxをつないでみた• →動かないのん
• つないでプルアップしてみた• →動かないのん
• ヒカリ大先生に聞いてみた• トランジスタを挟んでプルアップしたらいいっぽい。

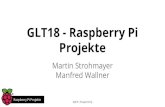
接続回路

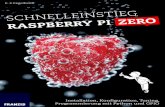
信号波形
送信信号 受信信号
なんか歪んでる、原因不明
いちおう、送受信は成功している


結果
•通信は成功していた!
•サーボ回った!
•サーボの回転角度は0~16383の14bit値 0は脱力
• ただし、約1~3000と約11000~16383では回転しなかった。• 回転値の計算間違いの可能性あり
• あと、パラメータ書き込み、読み込みコマンドが使用できたらスピード制限、電流制限ができるはず!

まとめ
• ICS3.5はわりと簡単• 送受信のペリフェラル関係が解決すれば簡単
• Raspberry PiでIO操作はわりと簡単
•要はスマートでインテリジェンスだからみんなRaspberry Piをしよう!