Curso de Bioestadística DEO/CICS. Pruebas de hipótesis MGA/DEO Pruebas de hipótesis MGA/DEO.
Upload
ognjenoklobdzijaCategory
view
22download
0description
1X.1. Mehanike veliine pri translatornom i rotacionom kretanju (NB! - podseanje)(kolona Veza vai kada translatorne veliine odgovaraju obimnim veliinama rotacionog kretanja)
Veliina Translatorno kretanje Veza Rotaciono kretanje
vreme t
put/ugao
0
, za:
( )za:
2
t
k p u
s v dt v const v t
v v ta const
1r
0
, za:
( )za:
2
t
k p u
dt const t
tconst
brzina/ugaona brzina
0
, za:ut
udsv s a dt a const a tdt
0
, za:ut
ud dt const tdt
ubrzanje/usporenje
dva v sdt
ddt
trzajdaj a v sdt
ddt
masa/momentinercije mase m re
2 = J
sila/moment PF m av
r = PT J
rad A =0
, za:t
P dt P const P t
, za: ( )k
p
s
k ps
F ds F const F s s
=
, za: ( )k
p
k pT d T const T
kinetika energija Ek =
2
2m v 2
2J
snaga P = Fv T
vreme ubrzanja/usporenja tu =
( ), za:
k
p
vk p
rez rezv
m v vm dv m constF F
( ), za:
k
p
k p
rez rez
JJ d J constT T
Znaenje indeksa u tabeli:u ubrzanje/usporenje,p poetna vrednost,
k krajnja vrednost,rez rezultantna vrednost ie ekvivalentna vrednost.
Veliina r je uz odgovarajui eksponent karakteristina veza odgovarajuih veliina u translatornom i rotacionom kretanju.
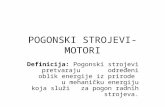
Promena |v| u zavisnosti od znaka a i v
Sl. 1. Promena vrednosti |v| pri promeni predznaka a i v
Veza n
obrt[ ]rad min[ ]s 30
n
Sl. 2. Teorijski i realni izgled funkcija
v,(t), a,(t), j,(t), F(t), T(t) i P(t)
v > 0, a > 0 |v| v > 0, a < 0 |v|
v < 0, a < 0 |v| v < 0, a > 0 |v|
2X.2. Izrazi za masu m i moment inercije mase J za neka homogena geometrijska telaU optem sluaju vai:
- masa:V
m dm ,
- moment inercije mase za teinu osu x: 2x xmJ r dm ,- tajnerova (Steiner) teorema za osu a paralelnu teinoj osi x: Ja = Jx + ms2, (s - razmak tih osa).
Telo Izrazi za m i J Telo Izrazi za m i JTelo rotacione izvodnice 2
1
2 ( )x
x
m f x dx
2
1
4 ( )2
x
xx
J f x dx
Kugla 343
m r
225x y z
J J J m r
uplja kugla
3 34 ( )3 s u
m r r
5 5
3 3
25
s ux y z
s u
r rJ J J mr r
za ;2
s us u
r rr r r
je:
24m r
223x y z
J J J m r
Pravi cilindar 2m r h 2
2xm rJ
2 2(3 )12y z
m r hJ J
uplji pravi cilindar
2 2( )s um r r h 2 2( )2
s ux
m r rJ
22 2( )
34
s u
y z
hm r rJ J
za ;2
s us u
r rr r r
je:
2m r h 2
xJ m r 2 2(6 )
12y zm r hJ J
Polukugla32
3m r
283320x y
J J m r
225z
J m r
Prava kupa
213
m r h
2310x
J m r
2 23 (4 )80y z
J J m r h
za tankozidi konusni platdebljine
30.2. Osnovni pojmovi o transformaciji energije
Sl. 1. Klasifikacija energije prema poreklu, [1]
Sl. 2. Konvencionalni prirodni oblici energije, transformacije ipostrojenja za transformaciju i korisni oblici energije, [1]
4Sl. 3. Transformacije neelektrinih oblika energije u elektrinu, [1]
5P.1. (primer) Prikaz rada pogonskog mehanizma u dijagramu T
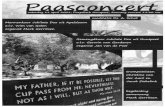
Zadatak: U dijagramu T prikazati sve faze rada mehanizma pogona kretanja kolica dizalicepri kretanju u smeru 1 (uz uspon staze i protiv vetra) i u smeru 2 (niz pad staze i niz vetar) na osnovukarakteristika pogonskog motora, mehanike konice i pojedinih otpora kretanju, datih na skici (svi momenti su svedeni na vratilo motora). Na dijagramu oznaiti stacionarne radne take pogona (uklju-ujui i stajanje), a za sve faze rada oznaiti moment ubrzanja/usporenja pogona pri nekoj brzini .Mehanika konica pri ukljuenju kasni za tMK mrtvo vreme konice.
Uproenja i zanemarenja: Ekvivalentna obrtna masa je tokom rada konstantna: J=const, svekarakteristike su date u istoj razmeri, a njihovo sabiranje/oduzimanje se moe vriti priblino grafiki. Zanemariti gubitke u prenosu snage od motora do pogonskih tokova kolica.
Sl. 1. Karakteristike pogonskog motora, konice i svih otpora kretanju
Otpori mogu biti reaktivni, potencijalni, ili kombinacija ova dva tipa. Na sl. 2. prikazan je tipian izgled karakteristika ovih vrsta otpora.
potencijalni otpor sa TO = const potencijalni otpor sa TOconst reaktivni otpor
Sl. 2. Karakteristike potencijalnog i reaktivnog otpora i njihova veliina pri = 0 (NB!)Otpor kotrljanja tokova (trenje) je reaktivni otpor po znaku je uvek suprotan brzini, sl. 3.Otpor nagiba puta je potencijalni otpor zadrava znak nezavisno od smera brzine, sl. 3.Otpor vetra, kao funkcija relativne brzine strujanja okolnog vazduha u odnosu na pokretni objekat,
sastoji se od 2 sabirka, sl. 3. i 4, a to su:- osnovni deo, koji zavisi od brzine vetra, ima karakter potencijalnog otpora, jer nije realno pret-
postaviti da vetar menja smer kad i pokretni objekat, ve moe da se pretpostavi da ima stalan smer, i - dodatni deo, koji zavisi od brzine pokretnog objekta, on ima karakter reaktivnog otpora, jer menja
smer pri promeni smera kretanja pokretnog objekta.
6Sl. 3. Otpori kretanju kolica Sl. 4. Otpor vetra kao funkcija relativnebrzine vazduha u odnosu na kolica
Zadato je da se kolica pri kretanju u smeru 1 kreu protiv vetra, a pri kretanju u smeru 2 uz pomo vetra. Zbog navedenog su ve unapred zadate razliite karakteristike ukupnog otpora vetra u zavisnosti od smera kretanja. Naime, otpor vazduha zavisi od relativne brzine vazduha u odnosu na prepreku na kojudeluje, sl. 4. U ovom sluaju, to je konstrukcija pokretnih kolica. Kada kolica stoje, relativna brzina vazduha prema kolicima jednaka je brzini vetra: vrel = vv. No, kada se kolica kreu, relativna brzina vazduha jednaka je zbiru (kolica se kreu protiv vetra), odn. razlici (kolica se kreu niz vetar) brzina vetra i kolica, sl. 4.
Sa TO oznaen je ukupni otpor kretanju kao suma otpora trenja kotrljanja, nagiba puta i vetra, sl. 5.
otpor trenja otpor nagiba puta otpor vazduha ukupni otporTtr = - sign const T = Gsin = const Tv = f (v2rel) TO = Ttr + T + Tv
Sl. 5. Sabiranje karakteristika pojedinanih otpora u karakteristiku ukupnog otpora
Mehanika konica ima karakteristiku tipa reaktivnog otpora. Stoga karakteristika mehanike ko-nice pri kretanju u smeru 2 moe da se smatra centralno simetrinom u odnosu na karakteristiku pri kreta-nju u smeru 1.
Mehanika konica po pravilu kasni pri ukljuenju za tMK za iskljuenjem pogonskog motora, zbog inercije masa elemenata mehanizma konice.
Brzina u trenutku reagovanja mehanike konice odreuje se iz osnovne jednaine kao:
1 1
1
( ) ( )0
kr poc k stMK
pog O O
J JJtT T T T
11 1 1( )
O MKk st MK
T t f tJ
odn. analogno i 22 2 2 ( )O MKk st MKT t f t
J
.
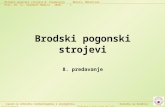
Na osnovu gornjih objanjenja je mogue prikazati rad pogonskog mehanizma kao na sl. 6.
7Sl. 6. Grafiki prikaz rada pogonskog mehanizma prema tekstu zadatka
Mada se to u zadatku ne trai, na sl. 6 je prikazano i koenje radom el. motora u reimu protiv-strujnog koenja (koenja kontrasmerom) umesto koenja mehanikom konicom.
Kako je zadato Ttr > T + Tv, a ukupni otpor ima preteno reaktivni karakter, u oba smera kretanjakolica pogonski motor radi u motorskom reimu rada, tj. u I i III kvadrantu. Da je kojim sluajem obratno, tj. da je Ttr < T + Tv, pogonski motor bi u smeru 2 kretanja kolica radio u generatorskom reimu rada, tj. uIV kvadrantu.
81.7. Formiranje kruto-kinetikog modela pogonskog mehanizma
Postupak redukcije masa i optereenja na osnovu Dalamberovog principa
Praenjem toka snage pri dizanju tereta (od motora kroz sistem do tereta), sl. 1, sledi:
1 1 1 2 2 2 2 3 3 3 3 4{[ ( ) ] } ( )M M K M S B B B B K K Q QT J J J i J i J i J J J i i m v / : ( )Q uk ukG i
uz: Q Qv a , 1 2 3R
uk B K R B K
i
i i i i i i i i i
, 1 2 3R
uk B K R B K
(redna veza PS, 2BB
id
!),
pa je: 1 2 3 42 2 2 2 21 1 1 2 1 2
( ) ( ) QM M M MM M K M S B QR R uk uk uk uk
GT J J J J J J J J m
i i i i i i
/ /
3 421 2 2 2 2 2
1 1 1 2 1 2
( )
O M ekv M
Q QS BM M K M
uk uk R R uk uk
T J
G mJ J J JJT J J Ji i i i i i
/ /M O M ekv M MT T J
Postupak redukcije masa i optereenja na osnovu Lagraneve jednaine II vrste
Uz uproenja: vratila apsolutno kruta, ue idealno savitljivo i neistegljivo, nema zazora u spregama zubaca zupanika i spojni-cama, konstantne mase i momenti inercija masa, zanemareni gubici(u cilju skraenja izvoenja), pa sistem ima 1 stepen slobode. Za generalisanu koordinatu q usvaja se ugao obrtanja rotora motoraM, pa je M generalisana brzina q . Uglovi obrtanja svih vratila,duina luka obrtanja bubnja i put dizanja tereta vezani su za usvoje-nu koordinatu navedenim prenosnim odnosima, pa je:
22 23 31 2 2
224
23 42
1 2 2 2 2 21 1 2
( )2 2 2
( )2 2
( )2
M K Mk
Q QS B B
QS B MM K
R uk
JJ J J JE
m vJ J J
mJ J J JJJ J Ji i i i i
0k kM
E Eq
3 421 2 2 2 2 2
1 1 2
( )Qk k S BM K MM R uk
mE E J J J JJJ J Jq i i i i i
3 421 2 2 2 2 2
1 1 2
( )Qk k S BM K MM R uk
mE E J J J JJd d J J Jdt q dt i i i i i
( ) ( )QMM M Q M M Q M Muk uk
Q
GA Q q T G s T G T
i i
0
k kE Ed Qdt q q
//
3 421 2 2 2 2 2
1 1 2
( )
O Mekv M
Q QS BM K M M
R uk ukTJ
m GJ J J JJJ J J Ti i i i i i
/ /ekv M M M O MJ T T
odn. dobija se identian rezultat (nakon dodavanja uticaja gubitaka u prenosu snage).
Sl. 1. Mehanizam pogona dizanja
9P.2. (primer) Svoenje pogonskog mehanizma na 1-maseni model Zadatak: Izvriti svoenje (redukciju) mehanizma pogona dizanja dizalice na 1-maseni model
na vratilo pogonskog el. motora za reime rada pogona:1) dizanje tereta i2) sputanje tereta,
i napisati odgovarajue jednaine kretanja modela.
Prenosni odnosi prenosnika snage su:
2/ 1
1
MM II
II
zi iz
, 4/ 23
IIII III
III
zi iz
, 6/ 3
5
IIIIII B
B
zi iz
, iM/B = iR = i1i2i3,
/2B
B Bv BB B
i iv d
, /B
Bv Q KQ
vi i nv
, /M
M Q uk R B KQ
i i i i iv
Stepeni iskorienja pojedinih stepeni prenosa u prenosniku snage su: - za reim rada dizanje tereta (smer toka snage motor teret): M-II = 1, II-III = 2, III-B = 3, M-B = R = 123, B-Bv = B,Bv-Q = K, M-Q = uk = RBK,- za reim rada sputanje tereta (smer toka snage teret motor): II-M = 1, III-II = 2, B-III = 3, B-M = R = '1'2'3, Bv-B = B B, Q-Bv = K, Q-M = 'uk = 'R'B'K.Ekvivalentna masa (ovde moment inercije mase) na vratilu el. motora, za sluaj bez gubitaka,
sledi iz uslova jednakosti kinetikih energija ekvivalentne mase (ovde moment inercije mase) na vratilu el. motora i svih masa pogonskog mehanizma:
0 2 2 2
//
2222
( )2 2 2 2
( )2 2 2
ekv M M M K I M II IIk ekv r k j
j
MQ QIV S B BIII III
J J J J JE E
m vJ J JJ
0/ 2 2 2 2
1 1 2( )QIV S BII III
ekv M M K IR uk
mJ J JJ JJ J J Ji i i i i
pa je ekvivalentni obrtni moment na vratilu el. motora usled inercije svih masa, za sluaj bez gubitaka: 0 0
// ekv M Min ekv MT J
10
Na mehanizam deluju samo 2 spoljna optereenja: moment motora i teina tereta. Ekvivalentno optereenje obrtnim momentom motora TM jednako je stvarnom, jer TM deluje na vratilu na koje se vriredukcija, pa iz gornjeg uslova jednakosti radova sledi:
// 1M M
M ekv M MM M
T TT Ti
(t.j. redukcija nije ni potrebna).
Ekvivalentno optereenje na vratilu motora usled teine tereta (ovde je to obrtni moment, jer se svoenje vri na obrtni element vratilo motora), za sluaj bez gubitaka, sledi iz uslova jednakosti radova optereenja ekvivalentnog obrtnog momenta usled teine tereta na vratilu motora i stvarne teine tereta:
0/ /
1( )O ekv r M M M O j M M QO ekv MMj
A T T A T Q h
0 /O ekv Muk
QTi
Ve prethodno izvedeni izraz za ekvivalentni obrtni moment na vratilu el. motora usled inercije svih masa, za sluaj bez gubitaka, moe se takoe dobiti iz uslova jednakosti radova, pod uslovom da su mase J = const:
0/ / ( ) 1
( )
in ekv r M in j M K I M Min ekv Mj
MII II II III III III IV S B B B Q Q Q
A T A J J J
J J J J J m v h
0 /
1 1 2
( )( ) Q QIV S B BII II III IIIM K I Min ekv M
R uk
m aJ J JJ JT J J Ji i i i i
0 /2 2 2 21 1 2( )
QIV S BII IIIM K I M ekv M M
R uk
mJ J JJ JJ J J Ji i i i i
Gubici potiu od prenosa snage za savlaivanje kako radnog otpora, tako i inercijalnih sila pri ubrza-nju sistema, a redukuju se za sluaj da su zadati:
- vrednou odgovarajuih otpora gubitaka na isti nain kao i optereenja, - stepenom iskorienja sledeom transformacijom, iji oblik zavisi od smera toka snage:
- el. motor teret, pogodno je snagu za savlaivanje j-tog gubitka izraziti kao:
1( ) ( 1)i jg j g j j u j i j i j i jr j r j
PP Q q P P P P
1( 1)Qg j i j
g jj j r j
P PQ
q q
Kako su potrebne vrednosti izlazne snage za savlaivanje:
- tereta Q: i QP Q v , = uk,
1( 1)Qguk
F Q
- inercije Q: Qi QinP F v , = uk,
1( 1)Q
inFg Q Quk
F m a
- inercije B: Bi in BP T , = R,
1( ) ( 1)B
inTg IV S B BR
T J J J
- inercije III: IIIi in IIIP T , = 1 2,
1 2
1( 1)III
inTg III IIIT J
- inercije II: IIi in IIP T , = 1,
1
1( 1)II
inTg II IIT J
- inercije M: Mi in MP T , = 1, 11( ) ( 1) 01
MinTg M K MT J J J
na osnovu jednakosti radova je ekvivalentni obrtni moment za savlaivanje gubitaka na vratilu motora:
11
/ / 1M
in
II III B Qin in in in
TQg ekv r g ekv M M g j g Q g M
jMT T T F
g II g III g B g Q
A T A F h T
T T T F h
/ / /
1 1 2
1 1( 1)
II III B Qin in in inT T T FQg g g g g Q in
g ekv M g ekv M g ekv Muk R uk uk uk
F T T T FT T T Q
i i i i i i i
2 2 2 21 1 21 1 2
1 1 1 1( 1) ( 1) ( 1) ( 1)QIV S BII III MR ukR uk
mJ J JJ Ji i ii i
i moe se dalje voditi samostalno, ili pridodati prvi lan uz T0O ekv/M:
0
/ / /1( 1)QO ekv M O ekv M g ekv M
uk uk uk uk uk
Q Q QT T Ti i i
a drugi lan uz T0in ekv/M:
0/ / / 2 2 2 21 1 2( )
Qin IV S BII IIIin ekv M M K I Min ekv M g ekv M
R uk
mJ J JJ JT T T J J Ji i i i i
2 2 2 21 1 21 1 2
1 1 1 1( 1) ( 1) ( 1) ( 1)( )
QIV S BII IIIM
R ukR uk
mJ J JJ Ji i i i i
/2 2 2 2
1 1 1 2 1 2( )QIV S BII III
M K I M ekv M MR R uk uk
mJ J JJ JJ J J Ji i i i i
Jekv/Mpa je ukupni obrtni moment na vratilu motora:
0 0/ / / // /M g M O ekv M in ekv M ekv M MO ekv M in ekv M
uk uk
QT T T T T T Ji
- teret el. motor (odn. konica), pogodno je snagu za savlaivanje j-tog gubitka izraziti kao:
( ) (1 )g j g j j u j i j u j u j j r u j r jP Q q P P P P P (1 )
Qg j u j
g j r jj j
P PQ
q q
Kako raspoloive vrednosti ulazne snage potiu od:
- tereta Q: u QP Q v , = uk, (1 )Q
g ukF Q
- inercije Q: Qu QinP F v , = uk, (1 )Q
inFg Q Q ukF m a
- inercije B: Bu in BP T , = R, ( ) (1 )B
inTg IV S B B RT J J J
- inercije III: IIIu in IIIP T , = 1 2, 1 2(1 )III
inTg III IIIT J
- inercije II: IIu in IIP T , = 1, 1(1 )II
inTg II IIT J
- inercije M: Mu in MP T , = 1, 1( ) (1 1) 0M
inTg M K MT J J Jna osnovu jednakosti radova je ekvivalentni obrtni moment za savlaivanje gubitaka na vratilu motora:
/ / 1M II
in in
III B Qin in in
T TQg ekv r g ekv M M g j g Q g M g II
jMT T F
g III g B g Q
A T A F h T T
T T F h
12
/ / /1 1 2
1 (1 )
II III B Qin in in inT T T FQg g g g g Q in
g ekv M ukg ekv M g ekv Muk R uk uk
F T T T FT T T Q
i i i i i i i
1 1 22 2 2 21 1 2
(1 ) (1 ) (1 ) (1 )( )
QIV S BII IIIR uk M
R uk
mJ J JJ Ji i i i i
i moe se dalje voditi samostalno, ili oduzeti prvi lan od T0O ekv/M:
0/ / / (1 )Q
O ekv M uk ukO ekv M g ekv Muk uk uk
Q Q QT T Ti i i
a drugi lan odT0in ekv/M:
0/ / / 2 2 2 21 1 2( )
Qin IV S BII IIIin ekv M M K I Min ekv M g ekv M
R uk
mJ J JJ JT T T J J Ji i i i i
1 1 22 2 2 21 1 2
(1 ) (1 ) (1 ) (1 )( )
QIV S BII IIIR uk M
R uk
mJ J JJ Ji i i i i
1 1 2 /2 2 2 21 1 2( )
QIV S BII IIIM K I R uk M ekv M M
R uk
mJ J JJ JJ J J Ji i i i i
Jekv/Mpa je ukupni obrtni moment na vratilu motora:
0 0/ / / // /M g M O ekv M in ekv M uk ekv M MO ekv M in ekv M
uk
QT T T T T T Ji
Kratki rezime obrazaca:- sluaj bez gubitaka:
0/ 2 2 2 2
1 1 2( )QIV S BII III
ekv M M K IR uk
mJ J JJ JJ J J Ji i i i i
0/O ekv M
uk
QTi
0 0 // ekv M Min ekv MT J 0 0 0
/ /M O ekv M in ekv MT T T
- sluaj sa gubicima, tok snage: el. motor teret:
/ 2 2 2 2
1 1 1 2 1 2( )QIV S BII III
ekv M M K IR R uk uk
mJ J JJ JJ J J Ji i i i i
/O ekv Muk uk
QTi
/ /in ekv M ekv M MT J / /M O ekv M in ekv MT T T
- sluaj sa gubicima, tok snage: teret el. motor:
/ 1 1 22 2 2 21 1 2( )
QIV S BII IIIekv M M K I R uk
R uk
mJ J JJ JJ J J Ji i i i i
/O ekv M ukuk
QTi
/ /in ekv M ekv M MT J / /M O ekv M in ekv MT T T
a u vezi sa izloenim analizu grupisanja masa i pridruivanja odgovarajueg u P.4.
13
REDUKCIJA MASA - Zadaci za vebu
Z.1 Kruni sto ST prenika dST i mase mST obre motoreduktor preko otvorenog zupastog para ZP brzinom nST. etiri radna komada Q dimenzija axbxc i mase mQ, rasporeeni su na preniku dQ. Premaemi mehanizma i datim podacima, sl. 1, odrediti ugaone brzine vratila reduktora M, 2 i 3, kao iekvivalentni moment inercije mase na vratilu el. motora!
Sl. 1. Skica pogonskog mehanizma obrtanja stola sa radnim komadima
Reenje:Prenosni odnosi: zupastih parova i1, i2 i iZP, reduktora iR i ukupni iuk jednaki su:
62 41 2
1 3 5; ; ZP
zz zi i iz z z
; iR = i1i2 ; iuk = iRiZP.
Iz brzine obrtanja stola nST sledi njegova ugaona brzina ST:30
STST
n
,
pa je ugaona brzina el. motora M odreena sa: M = STiuk ,
a ugaone brzine ostalih vratila odreene su sa: 2 31
; .M MRi i
Stepeni iskorienja prenosa su za reduktor: R = 12, ukupni: uk = RZP.
Moment inercije mase stola za vertikalnu osu obrtanja je:2
21 ( )2 2 8
ST ST STST ST
d m dJ m (-X.2 - tab.1, izraz za telo u obliku diska),
moment inercije mase radnog komada za vertikalnu teinu osu:2 2( )
12Q
z Qm a b
J
(-X.2 - tab.1, izraz za telo u obliku kvadra),
a iz tajnerove teoreme moment inercije mase radnog komada za osu obrtanja stola:2 2 2 2 2
2 2( ) ( )( ) [ ]2 12 4 4 3Q Q Q Q
Q z Q Q Q Qd m a b d m a bJ J m m d
,
pa je ukupni moment inercije mase obrtnog stola sa radnim komadima:2 2
2 21 ( )4 [ ]8 3ST Q ST Q ST ST Q Q
a bJ J J m d m d
.
14
Ekvivalentni moment inercije mase na vratilu el. motora odreen je iz jednakosti kinetikih energi-ja ekvivalentnog jednomasenog modela i viemasenog modela mehanizma za sluaj bez gubitaka, P.2.:
0 2 222 2/ 43 31 2 2
2
( )( ) 22 2 2 2 2
ekv M M ST Q STM M
M
J J JJJ J J
,
40 32/ 1
2 2 2
2 3( ) ( ) ( )
ST Qekv M M
M M M
ST
J JJJJ J J
,
pa nakon uzimanja u obzir gubitaka u prenosu, P.2, sledi:432
/ 1 2 2 21 1
.ST Qekv M MR R uk uk
J JJJJ J Ji i i
Z.2 Na osnovu datih podataka i skice pogona kretanja kolica (sl. 1, dva toka su pogonjeni, a druga dva slobodni), koja se kreu po blago nagnutoj inskoj stazi na otvorenom prostoru, odreditinepoznate veliine i:
- stacionarne otpore kretanju kolica,- ekvivalentni moment inercije masa na vratilu el. motora i potreban moment koenja za zaustav-
ljanje pogona za vreme tk, pri kretanju kolica nizbrdo uz pomo vetra.
Sl. 1. Mehanizam kretanja dizalice sa centralnim pogonom
Reenje:
Pri kretanju kolica na otvorenom, nagnutom terenu javljaju se stacionarni otpori:- otpor trenja kotrljanja tokova po inama: Wtr = wGkolcos ,
uz: w - koef. otpora kretanju toka po ini, mkol - masa kolica (teina kolica Gkol = gmkol),
- ugao nagiba puta.- otpor nagiba dizalike staze: W = Gkolsin ,- otpor vetra: Wv,- lokalni otpori: zanemareni,- ukupni stacionarni otpor kretanju kolica Wst = Wtr W Wv,
pri emu predznak + odgovara kretanju kolica uz nagib i protiv vetra, a predznak + kretanju niz nagib i uz pomo vetra.
Prenosni odnosi: zupastih parova i1 i i2, reduktora iR, toka iT i ukupni iuk iznose:2 4
1 2 1 21 3
2 1; ; ; ;R T uk R TT T
z zi i i i i i i i iz z d r
.
15
Brzine: ugaone (vratila) 2 i T, translatorna (kolica) vkol iznose:2
21 2
; ; ( )2
M M T T M MT kol T T T
R T R T uk
dv ri i i i i i i
.
Ukupni stepen iskorienja prenosa (uz zanemarene gubitke u leajevima transmisionih vratila itokova), za smer toka snage od tokova prema konici (pri koenju):
uk 12 R.
Ekvivalentni moment inercije mase na vratilu el. motora, za sluaj bez gubitaka:0 2 2 2 22
/ 1 32 22
( ) [ 4 2 ( )] 22 2 2 2 2
ekv M M M ES M S V T T kol kol
M
J J J J J J J J m vJ
,
0 32/ 1
2 2 2
2
4 2 ( )
( ) ( ) ( )
S V T kolekv M M ES
M M M
T kol
J J J J mJJ J J J
v
,
pa nakon uzimanja u obzir gubitaka u prenosu, P.2, sledi:32
/ 1 12 2 21
4 2 ( )S V T kolekv M M ES R uk
R uk
J J J J mJJ J J Ji i i
.
Ako se razmatra najnepovoljniji sluaj za konicu, merodavan je stacionarni otpor: Wst ko = W + Wv - Wtr,
pa je odgovarajui moment otpora redukovan na koeno vratilo:
/ /st ko uk
st M st Kuk
WT T
i
,
pri emu treba uoiti da zavisno od toga da li je po apsolutnoj vrednosti vei otpor Wtr ili suma otpora Wvi W, predznak otpora Wst ko moe biti + (tj. tei da nastavi kretanje kolica), ili - (tj. i sam koi, odn. pomae koenje).
Potreban moment konice za zaustavljanje kretanja kolica sadri 2 dela - moment za savlaivanje otpora (tj. zadravanje kolica od pomeranja usled vetra i nagiba, ovaj deo moe da bude i negativan!) imoment za zaustavljanje svih masa u kretanju:
/st ko uk M
K ekv Muk k
WT J
i t
.
NAPOMENA 1: Radna konica se po pravilu postavlja na vratilo motora, jer je tada najmanjipotreban moment koenja za isto vreme tk, a time i sama konica.
NAPOMENA 2: Pri izvoenju izraza za J'ekv nisu uzete u obzir neke mase sa skice (sasvim oprav-dano, zbog zanemarivog uticaja). Koje su to mase?
Z.3 Mehanizam pogona dizanja dizalice velike nosivosti podie teret pomou traka za veanje i traverze sa dve dvokrake kuke, sl. 1. Na osnovu skice i datih podataka odrediti nepoznate veliine, azatim i:
- ekvivalentni moment inercije masa na vratilu el. motora pri dizanju tereta,- ekvivalentni moment inercije masa na vratilu konice pri sputanju tereta i- momente stacionarnog otpora redukovane na vratilo el. motora pri dizanju i na vratilo konice pri
sputanju tereta i- potreban moment konice za zaustavljanje sputanja tereta za vreme tk.
16
Sl. 1. ema mehanizma pogona dizanja dizalice velike nosivosti
Reenje:
Prenosni odnosi: zupastih parova, reduktora iR, bubnja iB, koturae iK i ukupni iuk:62 4
1 2 3 1 2 31 3 5
2; ; ; ; ; ;KR B K uk R B RB K
zz z zi i i i i i i i i i i i iz z z d j
.
Brzine: ugaone vratila 2 i 3, bubnja B, translatorne obimna bubnja vB, tereta v su:
2 31 1 2 1 2 3
; ; ( ) ; ;M M M M B B MB K BR B K uk
vv vi i i i i i i i i i
.
Stepen iskorienja: - pri dizanju: reduktora R = 123, ukupni uk = RBK,- pri sputanju: reduktora 'R = '1'2'3, ukupni 'uk = 'R'B'K.
Ekvivalentni moment inercije mase na vratilu el. motora Jekv /M za sluaj bez gubitaka: 0 2 2 22
/ 1 3 32 2
224
2
( )2 2 2 2
( )( 2 2 ) 22 2
ekv M M M ES M
T QK S B B
M
J J J J JJ
m m vJ J J J
,
0 3 42/ 1
2 2 2 2
2 3
2 ( )
( ) ( ) ( ) ( )
T QK S Bekv M M ES
M M M M
B
m mJ J J J JJJ J J J
v
,
17
pa nakon uzimanja u obzir gubitaka u prenosu, pri dizanju, P.2, sledi:3 42
/ 1 2 2 2 2 21 1 1 2 1 2
2 ( ) T QK S Bekv M M ES
R R uk uk
m mJ J J J JJJ J J Ji i i i i
.
Ekvivalentni moment inercije mase na vratilu konice J'ekv/K (odreuje se analogno kao Jekv/M, ali seredukcija vri na vratilo konice) za sluaj bez gubitaka:
0 2 2 22/ 1 3 32 2
224
2
( )2 2 2 2
( )( 2 2 ) 22 2
ekv K B M ES M
T QK S B B
B
J J J J JJ
m m vJ J J J
,
0 1 32/ 4
2 2 2 2
2 3
2 ( )( ) ( ) ( ) ( )
T QM ESekv K K S B
B B B B
M
m mJ J J JJJ J J J J
v
.
Posmatrajui odnose brzina sa poetka zadatka lako se mogu prepoznati veze:
2 3 2 3 3
1 1 1; ; ;B B B BB KR M
i ii i i i v
,
pa nakon uzimanja u obzir gubitaka u prenosu, P.2, sledi:2 2 2 2
/ 1 2 2 3 2 3 3 3 3
4 2 2
( )
2 ( )
ekv K M ES R R
T QK S B B K
B K
J J J J i J i i J i
m mJ J J J
i i
NB! Mase vratila I, II i III redukuju se u smeru toka snage, pa su zbog toga stepeni iskorienja prenosa bez ' (R, 2, 3), a mase tereta i traverze suprotno smeru toka snage, pa su zbog toga stepeniiskorienja prenosa sa ' ('B, 'K).
Stacionarni moment otpora, redukovan na vratilo el. motora i na vratilo bubnja:- pri dizanju tereta:
/ /( ) ( )
;T Q T Qst M st Buk uk K B K B
m m g m m gT T
i i i
,
- pri sputanju tereta:
/ /( ) ( )
;T Q T Qst M uk st B K Buk K B
m m g m m gT T
i i i
.
Potreban moment konice za zaustavljanje sputanja tereta sadri 2 dela - moment za savlaivanje otpora (tj. zadravanje teine traverze i tereta) i moment za zaustavljanje svih masa u kretanju:
/( )T Q B
K K B ekv KK B k
m m gT J
i i t
.
NAPOMENA: Havarijska konica se postavlja to blie radnom ureaju, tj. teretu, iako je tu potre-ban najvei moment koenja za isto vreme tk, jer se tako postie najvea bezbednost sistema (npr. u slu-aju loma vratila reduktora, konica na vratilu motora ne spreava pad tereta!).
18
1.8. Odreivanje trajanja prelaznih reima rada
Postupak odreivanja Tin/M pri Jekv const (podseanje!)Ako je Jekv const (zbog stvarno promenljive mase, ili promenljivog poluprenika, a time i
momenta inercije mase, ili promenljivog prenosnog odnosa): Jekv = f(M, M, t), (t u zagradi oznaava eksplicitnu zavisnost), Tin/M ukljuuje dodatne lanove, koji zavise od parametara od kojih zavisi Jekv. Oovom treba da se vodi rauna pri sloenom kretanju nekog elemenata prenosnika (npr. klipni i poluni mehanizmi i sl.). Prema Lagranevoj jedn. II vrste za ekvivalentni jednomaseni model je:
/( )k k
j MM M j
E Ed Tdt
, uz: /j M
jQ T , pa je leva strana jednaine:
/ ( )k kin MM M
E EdTdt
(1)
a izraz za kinetiku energiju ekvivalentnog momenta inercije mase Jekv/M je:2
/2
ekv M Mk
JE (2)
pa je:2
//2
k ekv MMekv M M
M M
E J J
(3)
2/ / /
/( ) ( )2k ekv M ekv M ekv MM
M M M ekv M MM M M
E J J dJd d Jdt dt dt
,
a kako je:/ / / /ekv M ekv M ekv M ekv M
M MM M
dJ J J Jdt t
, i
2 2 2/ / / /
2( )ekv M ekv M ekv M ekv M
M MM M M MM
J J J Jddt t
, zamenom sledi:
2/ / //( ) 2k ekv M ekv M ekv Mekv M M M M M M
M MM
J J JEd J tdt
2 2 23 2 2/ / /
22 2 2ekv M ekv M ekv MM M M M
M M MM
J J Jt
(4)
2 2 22/ / / /( ) ( )
2 2 2 2k ekv M M ekv M ekv M ekv MM M
MM M M M M
E J J J J
(5)
zamenom (4) i (5) u (1) sledi: 02
/ / // / 2 2
ekv M ekv M ekv MMin M ekv M M M M M
M M
J J dJT Jdt
2 2 23 2 2/ / /
22 2 2ekv M ekv M ekv MM M M M
M M MM
J J Jt
(6)
a iz (6) sledi za sluaj da je Jekv/M:
= const / / / 0ekv M ekv M ekv MM M
J J Jt
/ /in M ekv M MT J (7)
= f(M) / / 0ekv M ekv MM
J Jt
2/
/ / 2ekv MM
in M ekv M MM
JT J
(8)
19
= f(M) / / 0ekv M ekv MM
J Jt
22/ /
/ / 2(2 )2ekv M ekv MM
in M ekv M M M MM M
J JT J
(9)
Izrazi za posmatrane veliine znatno su sloeniji kada vrednost neke od masa (time i ekvivalentne mase) nije konstantna, ve je funkcija nekog parametra (t, , i sl.). Zanemarenje ove zavisnosti vodipogrenom rezultatu. Ako se razmatraju ba picevi promenljive vrednosti posmatrane veliine (npr. ekvivalentne mase ili optereenja) i njima izazvani uticaji, takva pogreka je najee neprihvatljiva. No, za neke namene odreena uproenja su sasvim prihvatljiva, a zbog kraeg prorauna ak i poeljna. U sluaju periodino promenljivih vrednosti posmatranih veliina, esto je prihvatljivo uproenje (npr. pri odreivanju potrebne snage pogonskog motora, trajanja zaleta pogona i sl.) zamena stvarnog izraza zaveliinu V zavisnu od parametra p srednjom vrednou (nezavisnom od parametra) te veliine Vsr u tokunjene promene, odreenom kao:
1 ( )kr
poc
p
srkr poc p
V V p dpp p
(10)
U pogonskim sistemima esto je ova promena periodina, pa je npr. za Jekv zavisno od ugla koji semenja od 0 do 2, odn. od vremena t u toku periode promene Tper:
2
0
1 ( )2ekv sr ekv
J J d const
, odn. kao:
0
1 ( )perT
ekv sr ekvper
J J t dt constT
(11)
Postupak grafikog diferenciranja i integraljenja grafiki zadate funkcije (podseanje!)
Postupci grafikog diferenciranja ( f ---) i integraljenja ( f --) grafiki zadate funkcije ( f ) datisu na sl. 2. Pri rastojanju pola diferenciranja pd [mm] i integraljenja pi [mm], razmere u [jed/mm] su:
t ff fu u u p ,
ff
t f
uu
u p
.
Sl. 1. Postupci grafikog diferenciranja ( f ---) i integraljenja ( f --) funkcije (f )
20
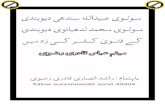
Veza dijagrama T = f(t) i = f(t) preko dijagrama = f(T)
Iz dijagrama = f(T) ne moe da se direktno oita zavisnost njegovih koordinata T i od t. Ali, nave prikazani nain, -1.8, moe da se iz dijagrama = f(T) grafoanalitiki odredi zavisnost = f(t),a zatim grafikom metodom, sl. 2, iz dijagrama = f(T) i = f(t) priblino (ali za veliku veinu namena dovoljno tano) odredi dijagram T = f(t). Na sl. 2. prikazan je postupak grafikog odreivanja zavisnosti T = f(t) na primeru dizanja tereta pogonom sa asinhronim kaveznim el. motorom i mehanikom konicom, koja kasni pri ukljuenju, tj. postoji mrtvo vreme konice. Pojedine take dijagrama T = f(t) (npr. taka CM) odreene su presekom vertikale sputene iz odgovarajue take sa jednakim momentom u dijagramu = f(T) (taka AM) i vertikale sputene iz odgovarajue take sa jednakom brzinom u dijagramu = f(t)(taka BM) do kose pomone linije, a zatim horizontalno produene ulevo u dijagram T = f(t).
Sl. 2. Postupak grafikog odreivanja dijagrama T = f(t) na osnovu dijagrama = f(T) i = f(t), za fazu dizanja tereta pogona dizanja sa asinhronim kaveznim motorom i mehanikom konicom, koja pri ukljuenju kasni za odreenu vrednost tzv. mrtvo vreme reagovanja konice.
Dijagram T = f(t) je podloga za npr. proveru zagrevanja el. motora, -2.3.2. Naravno da ovazavisnost T = f(t) moe da se odredi i grafoanalitiki, no, uz neto vei obim posla.