Parilas Flyer 12 - Fraunhofer ILT · PRojeCT NUMBeR: eCo/09/256174. Lorem Ipsum sIt amet Ipsum...
2
Members of the Consortium Lehrstuhl für Lasertechnik LLT www.llt.rwth-aachen.de Laser Analytical Systems & Automation GmbH www.lsa-systems.de TITECH GmbH www.titech.de Constellium www.constellium.com Funding Agency and Supporting Programme PRESENTATION OF THE PROJECT »PARILAS« Project Coordinator Dr. Reinhard Noll Phone +49 241 8906-138 [email protected] Chair for Laser Technology LLT, RWTH Aachen University Steinbachstraße 15, 52074 Aachen, Germany www.llt.rwth-aachen.de Project Leader and Organization Dipl.-Phys. Patrick Werheit Phone +49 241 8906-308 [email protected] Fraunhofer Institute for Laser Technology ILT Steinbachstraße 15, 52074 Aachen, Germany www.ilt.fraunhofer.de PILOT DEMONSTRATION OF HIGH PERFORMANCE ALUMINUM RECYCLING BY INLINE LASER IDENTIFICATION CONSORTIUM WWW.PARILAS.EU PROJECT NUMBER: ECO/09/256174
Transcript of Parilas Flyer 12 - Fraunhofer ILT · PRojeCT NUMBeR: eCo/09/256174. Lorem Ipsum sIt amet Ipsum...

Members of the Consortium
Lehrstuhl für Lasertechnik LLT
www.llt.rwth-aachen.de
Laser Analytical
Systems & Automation GmbH
www.lsa-systems.de
TITeCH GmbH
www.titech.de
Constellium
www.constellium.com
Funding Agency and Supporting Programme
P R E S E N TAT I O N O F T H E P R O J E C T » PA R I L A S «
Project Coordinator
Dr. Reinhard NollPhone +49 241 [email protected] for Laser Technology LLT, RWTH Aachen UniversitySteinbachstraße 15, 52074 Aachen, Germanywww.llt.rwth-aachen.de
Project Leader and Organization
Dipl.-Phys. Patrick WerheitPhone +49 241 [email protected] Institute for Laser Technology ILTSteinbachstraße 15, 52074 Aachen, Germanywww.ilt.fraunhofer.de
pILot DemonstratIon oF HIGH perFormance aLumInum recYcLInG BY InLIne Laser IDentIFIcatIon
CONSORTIUM
W W W. PA R I L A S . E U
P R o j e C T N U M B e R : e C o / 0 9 / 2 5 6 1 7 4

Lorem Ipsum sIt amet Ipsum consecteur venIat.
The LIBS sensor uses a 3-axis scanner to direct the next laser burst
at the target coordinates. The spectral data is analyzed by the
control computer which then makes a classification decision which
is forwarded to the diversion unit. The diversion unit then hits the
particle with a jet of compressed air to knock it into one of four
fractions product A, product B, reefed or reject.
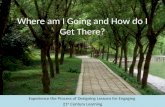
Method
• Vibratory feeder (1) spreads the pieces on a conveyor belt (2)
• Each scrap piece is detected by a 3D camera (3)
• A laser beam (4) with tailored pulse profile is focused on
each scrap piece. The surface material is thereby ablated
to uncover the bulk material
• The laser causes material to be evaporated into plasma,
emitting a spectral fingerprint
• The emitted light is detected by a multichannel spectrometer,
to characterize the composition of the sample
• The samples are sorted with regard to their alloying composition (5)
Expected Results
• Demonstration of the economic feasibility of high performance
aluminum recycling based on single particle sorting using
laser technology
• Sorting of 20 to 200 tons per day (depending on scrap sizes)
• System availability > 90 %
Objectives
The objective of PARILAS is to demonstrate the sorting
of post-consumer scrap aluminum into fractions which can
be re-melted and used to reduce the amount of prime metal
required to make aluminum alloys. To provide high quality
input material for remelters and refiners this mixture has to be
separated into cast and wrought fractions. The wrought fractions
have to be further allocated to alloy types. With well characterized
recycled aluminum alloy fractions, current limitations of the
process guidance in remelting and refining lines for the production
of secondary aluminum can be overcome. Furthermore it is
the aim to improve the quality and to expand the applicability
of secondary aluminum.
The planned pilot sorting machine consists of a vibratory feeder,
conveyor belt, 3D camera, control computer, laser induced
breakdown spectroscopy (LIBS) sensor, and a diversion unit:
The vibratory feeder spreads the particles into a single layer and
drops them down a chute onto the belt. The belt carries the
particles at 3 m/s under the line-laser of the 3D camera system.
The control computer uses the 3D data to generate targeting
information for the sensor.
Prototype Parilas-Demonstrator
1 Vibratory feeder
2 Conveyor belt
3 3D camera
4 Laser and spectrometer module
5 Diversion unit
PRojeCT »PARILAS«