
“Modelado y simulación de un actuador elástico en...
6
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO Tema A3b Mecanismos y Robótica: actuadores robóticos. “Modelado y simulación de un actuador elástico en serie” Carlos Manuel Lara-Barrios a , Andrés Blanco Ortega a , Arturo Abúndez Pliego a , Benjamín González Vizcarra b , Miguel Ángel Ávila Puic b a Tecnológico Nacional de México / Centro Nacional de Investigación y Desarrollo Tecnológico, Departamento de Ingeniería Mecánica, Prolongación Palmira s/n esq. Apatzingán, Col. Palmira, CP 62490, Cuernavaca, Morelos, México b Escuela de Ciencias de la Ingeniería y Tecnología / Universidad Autónoma de Baja California, Blvd. Universitario #1000, Unidad Valle de las Palmas, Tijuana, Baja California, México. *Autor contacto.Dirección de correo electrónico: [email protected] R E S U M E N El desarrollo de mecanismos de accionamiento para aplicaciones robóticas que interactúan con superficies irregulares ha permitido plantear el concepto de “actuador elástico en serie”. La investigación relacionada con estos dispositivos ha estudiado su aplicación en distintas áreas de la robótica como el diseño de vehículos de exploración o mecanismos de accionamiento en robots bípedos y en prótesis inteligentes. Junto con el diseño de estos actuadores, se han explorado también los algoritmos de control adecuados para dichas aplicaciones. En este artículo se presenta el modelado dinámico de un actuador elástico en serie y la evaluación de un algoritmo de control para seguimiento de trayectorias basado en la propiedad de planitud diferencial. Se presentan los resultados de simulación cuando el modelo dinámico sigue una trayectoria armónica con y sin perturbación armónica externa. Los resultados encontrados demuestran la robustez del algoritmo de control al compensar el seguimiento de trayectoria con perturbación. Palabras Clave: planitud diferencial, representación en espacio de estados, actuador elástico en serie (AES), simulación dinámica, robótica, control. A B S T R A C T The development of actuation mechanisms on robotic applications interacting with irregular surfaces has allowed the concept of "series elastic actuator". Related research with these devices have studied its applications on the field of robotics as exploration vehicles or actuation mechanisms on biped robots and intelligent prosthetics. Along with actuator design, control algorithms have been studied for such applications. This paper presents the dynamic modelling of a series elastic actuator and the assessment of a control algorithm for path tracking based on differential flatness. Simulation results are presented when the dynamic model follows a harmonic path with and without an external harmonic disturbance. Results shown that the robustness of the control algorithm compensates the path tracking with disturbances. Keywords: differential flatness, state-space representation, series elastic actuator (SEA), dynamic simulation, robotics, control. 1. Introducción El término “actuador” se puede definir como un componente de máquina cuya finalidad es transmitir una acción dentro de un sistema automatizado a partir de una fuente de energía de entrada. Los actuadores más comunes en aplicaciones robóticas transmiten fuerza mecánica a partir de energía neumática, hidráulica o eléctrica. Las características más comunes para la selección de actuadores en aplicaciones de robótica involucran aspectos como: densidad de fuerza, impedancia mecánica, ancho de banda de fuerza, rango dinámico, entre otras [1] . A mediados de la década de 1990, Pratt y Williamson propusieron el concepto de Actuador Elástico en Serie (AES, de Series Elastic Actuator en inglés) en [2] con el objetivo de ofrecer un sistema de accionamiento con características adecuadas para la transmisión de fuerzas y movimiento en aplicaciones de robótica humanoide y vehículos de exploración, como lo son la tolerancia a cargas de impacto, el control estable de la fuerza y la capacidad de almacenar energía potencial, principalmente. El principio de funcionamiento estaba basado en un ensamble motor- reductor conectado en serie con un elemento elástico pasivo (representado por un resorte) que a su vez se acopla con la carga a accionar. Esta configuración básica se presenta en la Figura 1. En comparación con sistemas de accionamiento convencionales, al emplear un AES la interfaz entre el actuador y su carga de salida se vuelve menos rígida, permitiendo tener un efecto de filtro paso bajo para cargas de impacto, reduciendo también las fuerzas de reacción no deseadas en los sistemas de transmisión acoplados al motor. ISSN 2448-5551 DM 1 Derechos Reservados © 2017, SOMIM
Transcript of “Modelado y simulación de un actuador elástico en...

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Tema A3b Mecanismos y Robótica: actuadores robóticos.
“Modelado y simulación de un actuador elástico en serie”
Carlos Manuel Lara-Barrios a, Andrés Blanco Ortega a, Arturo Abúndez Pliego a, Benjamín González
Vizcarra b, Miguel Ángel Ávila Puic b
aTecnológico Nacional de México / Centro Nacional de Investigación y Desarrollo Tecnológico, Departamento de Ingeniería Mecánica, Prolongación
Palmira s/n esq. Apatzingán, Col. Palmira, CP 62490, Cuernavaca, Morelos, México b Escuela de Ciencias de la Ingeniería y Tecnología / Universidad Autónoma de Baja California, Blvd. Universitario #1000, Unidad Valle de las Palmas,
Tijuana, Baja California, México.
*Autor contacto.Dirección de correo electrónico: [email protected]
R E S U M E N
El desarrollo de mecanismos de accionamiento para aplicaciones robóticas que interactúan con superficies irregulares
ha permitido plantear el concepto de “actuador elástico en serie”. La investigación relacionada con estos dispositivos
ha estudiado su aplicación en distintas áreas de la robótica como el diseño de vehículos de exploración o mecanismos
de accionamiento en robots bípedos y en prótesis inteligentes. Junto con el diseño de estos actuadores, se han explorado
también los algoritmos de control adecuados para dichas aplicaciones. En este artículo se presenta el modelado
dinámico de un actuador elástico en serie y la evaluación de un algoritmo de control para seguimiento de trayectorias
basado en la propiedad de planitud diferencial. Se presentan los resultados de simulación cuando el modelo dinámico
sigue una trayectoria armónica con y sin perturbación armónica externa. Los resultados encontrados demuestran la
robustez del algoritmo de control al compensar el seguimiento de trayectoria con perturbación.
Palabras Clave: planitud diferencial, representación en espacio de estados, actuador elástico en serie (AES), simulación
dinámica, robótica, control.
A B S T R A C T
The development of actuation mechanisms on robotic applications interacting with irregular surfaces has allowed the
concept of "series elastic actuator". Related research with these devices have studied its applications on the field of
robotics as exploration vehicles or actuation mechanisms on biped robots and intelligent prosthetics. Along with
actuator design, control algorithms have been studied for such applications. This paper presents the dynamic modelling
of a series elastic actuator and the assessment of a control algorithm for path tracking based on differential flatness.
Simulation results are presented when the dynamic model follows a harmonic path with and without an external
harmonic disturbance. Results shown that the robustness of the control algorithm compensates the path tracking with
disturbances.
Keywords: differential flatness, state-space representation, series elastic actuator (SEA), dynamic simulation, robotics,
control.
1. Introducción
El término “actuador” se puede definir como un componente
de máquina cuya finalidad es transmitir una acción dentro
de un sistema automatizado a partir de una fuente de energía
de entrada. Los actuadores más comunes en aplicaciones
robóticas transmiten fuerza mecánica a partir de energía
neumática, hidráulica o eléctrica. Las características más
comunes para la selección de actuadores en aplicaciones de
robótica involucran aspectos como: densidad de fuerza,
impedancia mecánica, ancho de banda de fuerza, rango
dinámico, entre otras [1] .
A mediados de la década de 1990, Pratt y Williamson
propusieron el concepto de Actuador Elástico en Serie
(AES, de Series Elastic Actuator en inglés) en [2] con el
objetivo de ofrecer un sistema de accionamiento con
características adecuadas para la transmisión de fuerzas y
movimiento en aplicaciones de robótica humanoide y
vehículos de exploración, como lo son la tolerancia a cargas
de impacto, el control estable de la fuerza y la capacidad de
almacenar energía potencial, principalmente. El principio de
funcionamiento estaba basado en un ensamble motor-
reductor conectado en serie con un elemento elástico pasivo
(representado por un resorte) que a su vez se acopla con la
carga a accionar. Esta configuración básica se presenta en la
Figura 1.
En comparación con sistemas de accionamiento
convencionales, al emplear un AES la interfaz entre el
actuador y su carga de salida se vuelve menos rígida,
permitiendo tener un efecto de filtro paso bajo para cargas
de impacto, reduciendo también las fuerzas de reacción no
deseadas en los sistemas de transmisión acoplados al motor.
ISSN 2448-5551 DM 1 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Este tipo de actuadores tiene un control preciso de la
fuerza a la salida en función de la deformación del resorte
en serie a partir de la ley de Hooke; evitando así el uso de
sensores costosos como celdas de carga que además no son
tolerantes ante determinadas fuerzas de impacto. En
términos generales, un ensamble de AES tiene propiedades
características de su diseño como lo son: baja impedancia
mecánica, baja fricción, ancho de banda mejorado y alta
sensibilidad a la fuerza [3].
Figura 1. Principio de funcionamiento de un actuador elástico en
serie.
El control para AES tuvo sus primeros acercamientos a
través de controladores anticipativos y retroalimentados
empleando lazos PID y sus variaciones típicas [2,4]. Los
desarrollos más recientes en este ámbito han empleado
también otras estrategias como el control de impedancia
[5,6], seguimiento de trayectorias [7–9] o control adaptativo
[10], principalmente para aplicaciones en el desarrollo de
prótesis robóticas de miembro inferior.
En este artículo se plantea el modelado de un AES en
espacio de estados y la simulación de un controlador para el
seguimiento de trayectorias basado en la propiedad de
planitud diferencial sobre un prototipo virtual con el
objetivo de abordar el diseño y la caracterización de este tipo
de actuadores.
La propiedad de planitud diferencial, planteada en
[11,12], permite realizar la planeación y el seguimiento de
trayectorias a partir de la definición de una salida plana del
sistema a partir de su matriz de controlabilidad. Un sistema
lineal es diferencialmente plano si todas las variables del
sistema pueden ser expresadas a partir de las derivadas
sucesivas de la salida plana.
La sección 2 de este artículo describe el modelo dinámico
del sistema a partir de un prototipo virtual, así como su
expresión en espacio de estados. La sección 3 presenta el
diseño del controlador para seguimiento de trayectorias a
partir del espacio de estados y la propiedad de planitud
diferencial. Posteriormente, la sección 4 muestra la
implementación del controlador en el prototipo virtual
dentro de un ambiente de simulación dinámica para
comprobar el seguimiento de trayectorias. Finalmente se
presentan los resultados de los análisis realizados en la
sección 5. La sección 6 presenta las conclusiones y el trabajo
futuro relacionado.
2. Modelado dinámico del actuador elástico en serie
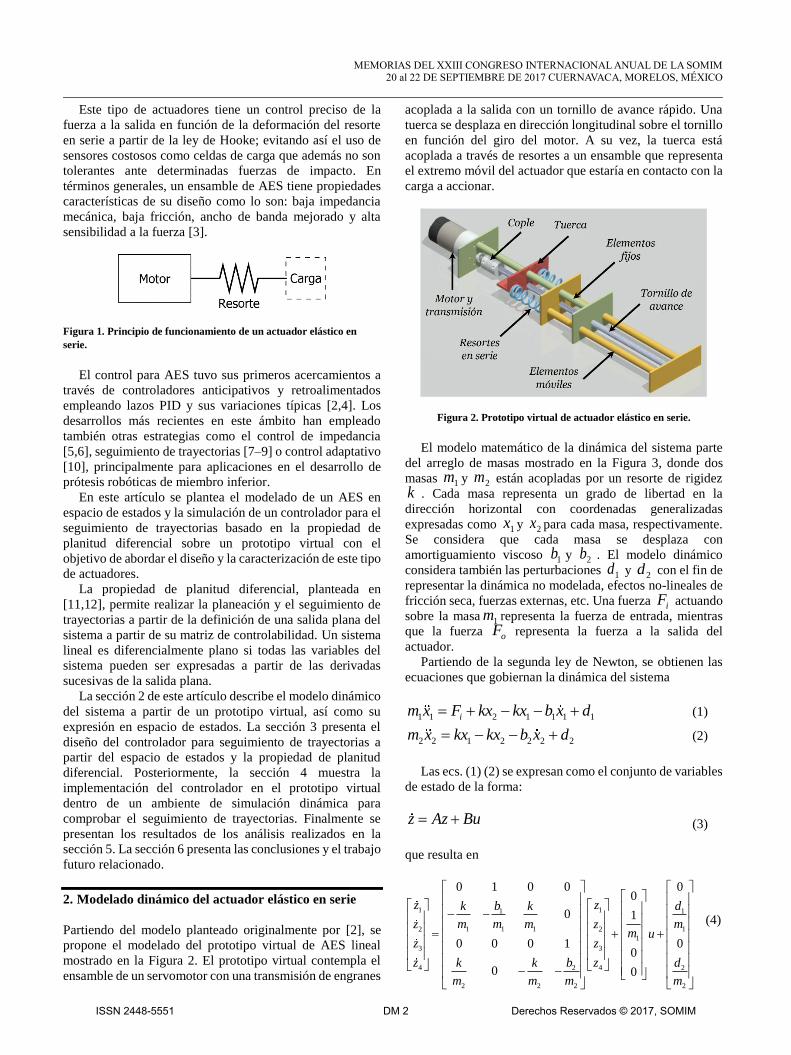
Partiendo del modelo planteado originalmente por [2], se
propone el modelado del prototipo virtual de AES lineal
mostrado en la Figura 2. El prototipo virtual contempla el
ensamble de un servomotor con una transmisión de engranes
acoplada a la salida con un tornillo de avance rápido. Una
tuerca se desplaza en dirección longitudinal sobre el tornillo
en función del giro del motor. A su vez, la tuerca está
acoplada a través de resortes a un ensamble que representa
el extremo móvil del actuador que estaría en contacto con la
carga a accionar.
Figura 2. Prototipo virtual de actuador elástico en serie.
El modelo matemático de la dinámica del sistema parte
del arreglo de masas mostrado en la Figura 3, donde dos
masas 1m y 2m están acopladas por un resorte de rigidez
k . Cada masa representa un grado de libertad en la
dirección horizontal con coordenadas generalizadas
expresadas como 1x y 2x para cada masa, respectivamente.
Se considera que cada masa se desplaza con
amortiguamiento viscoso 1b y 2b . El modelo dinámico
considera también las perturbaciones 1d y 2d con el fin de
representar la dinámica no modelada, efectos no-lineales de
fricción seca, fuerzas externas, etc. Una fuerza iF actuando
sobre la masa 1m representa la fuerza de entrada, mientras
que la fuerza oF representa la fuerza a la salida del
actuador.
Partiendo de la segunda ley de Newton, se obtienen las
ecuaciones que gobiernan la dinámica del sistema
1 1 2 1 1 1 1im x F kx kx b x d (1)
2 2 1 2 2 2 2m x kx kx b x d (2)
Las ecs. (1) (2) se expresan como el conjunto de variables
de estado de la forma:
z Az Bu (3)
que resulta en
11 1 1
11 1 12 2
1
3 3
4 4 2
2
2
2 2 2
0 1 0 0 00
0 1
0 0 0 1 00
0 0
bk kz z d
mz zm u
z z
z
m m m
b
m m m
z dk k
m
(4)
ISSN 2448-5551 DM 2 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
donde 1 1z x , 2 1z x , 3 2z x , 4 2z x y iF u .
Mientras que A representa la matriz dinámica, B es la
matriz de control, z es el vector de estados y u representa
el vector de entradas del sistema.
Figura 3. Diagrama esquemático del modelo dinámico del actuador
elástico en serie propuesto.
3. Diseño del controlador de seguimiento de trayectorias
basado en planitud diferencial
El controlador utiliza la propiedad de planitud diferencial de
la dinámica del sistema con el objetivo de realizar un
seguimiento de trayectorias. De acuerdo con esta propiedad,
un sistema es diferencialmente plano si su representación en
espacio de estados es controlable. Se obtuvo la matriz de
controlabilidad oC del sistema a partir de
2 3
oC B AB A B A B (5)
La controlabilidad de un sistema se comprueba siempre
que las dimensiones de la matriz de controlabilidad oC sean
iguales a su rango. Del cálculo resulta que el rango de
4oC , por lo cual el sistema es controlable y, a su vez,
diferencialmente plano.
La salida plana F del sistema en espacio de estados se
obtiene de la última fila en la inversa de la matriz de
controlabilidad oC . Lo cual se expresa como:
1
21
1 2 3
3
4
10 0 0 1 o
z
zF m m z
z
Cz k
(6)
De acuerdo con [12], la salida plana se expresa
únicamente a partir de la variable de estado, por lo cual la
salida plana se reduce a:
3z F (7)
Posteriormente, las variables de estado y la entrada de
control u se expresan en términos de F y sus derivadas
sucesivas:
2 21
m bz F F F
k k (8)
2 22
m bz F F F
k k (9)
4z F (10)
1 2
1 2 2 1
1 2 1 2 1 2
1
1
IVm mu F b m b m F
k k
m m b b F b b Fk
(11)
Se diseña el controlador promedio basado en la propiedad
de planitud diferencial. De la ec. (11) se sustituye la derivada
de alto orden por un controlador auxiliar auxv :
1 2 11 2 2 1
11 2 1 2 1 2
m m
auxk k
k
u v b m b m F
km km b b F b b F
(12)
Se define el control auxiliar para el seguimiento de
trayectorias planificadas deseadas (dF ) incluyendo dos
términos de acción integral que proporciona la robustez al
sistema en lazo cerrado frente a perturbaciones de primer
grado:
5 4
3 2 1 0
0 0 0
IV
aux d d d
t
d d d
t
d
v F t F F t F F t
F F t F F t F F d
F F d d
(13)
Donde i representa coeficientes constantes
seleccionados de manera que el polinomio cumpla con el
criterio de Hurwitz para garantizar que la dinámica del error
sea asintóticamente estable en el seguimiento de trayectorias
de la salida plana. Posteriormente, la salida plana y sus
derivadas sucesivas se calculan en términos de los estados
del sistema:
3F z (14)
4F z (15)
2 2
1 3 4
2 2 2 2
b dk kF z z z
m m m m (16)
2
2 2 2 2 2
1 2 3 42 2 2 2
2 22 2 2 2
+kb kb b b dk k
F z z z zm mm m m m
(17)
ISSN 2448-5551 DM 3 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Con el control propuesto vaux, se igualan las dos
relaciones del control (11) y (12) para obtener la dinámica
en lazo cerrado del sistema.
5 4
3 2
1 00 0 0
0
IV IV
d d d
d d
t t
d d
F F t F F t F F t
F F t F F t
F F d F F d d
(18)
Al considerar el error como de F F y derivar, se
obtiene el polinomio característico del sistema ( )p s en
lazo cerrado:
6 5 4 3 2
5 4 3 2 1 0 0p s s s s s s s (19)
Se propuso un polinomio de sexto orden para determinar
las ganancias del controlador:
3
2 22 0n ns s (20)
con valores 0.7071 y 20n .
4. Simulación
El modelo matemático del controlador basado en la
propiedad de planitud diferencial fue expresado en un
diagrama de bloques de Simulink dentro del software
matemático Matlab (como el mostrado en la Figura 4)
vinculado al software de ingeniería asistida por
computadora MSC ADAMS para obtener la respuesta del
sistema en el seguimiento de trayectorias con y sin
perturbaciones externas.
Para la simulación se consideró amortiguamiento viscoso
en ambas masas y una fuerza de perturbación, como se
observa en la Figura 5. La Tabla 1 presenta los valores de
simulación utilizados en el modelo dinámico del sistema. La
trayectoria deseada 3dz para el controlador consideró una
trayectoria sinusoidal, dada por la ec. (21)
3 sind dF t z A t (21)
con valores de amplitud 0.008A m y de frecuencia31.41 /rad s .
Tabla 1. Parámetros de simulación del AES.
Parámetro Valor Unidades
m1 0.042 kg
m2 0.328 kg
b1 2 Ns/m
b2 2 Ns/m
k 3960 N/m
Figura 4. Diagrama de bloques del modelo dinámico del AES y el
controlador para seguimiento de trayectorias.
Figura 5. Prototipo virtual del actuador elástico en serie dentro del
ambiente de simulación multicuerpo MSC ADAMS.
5. Resultados
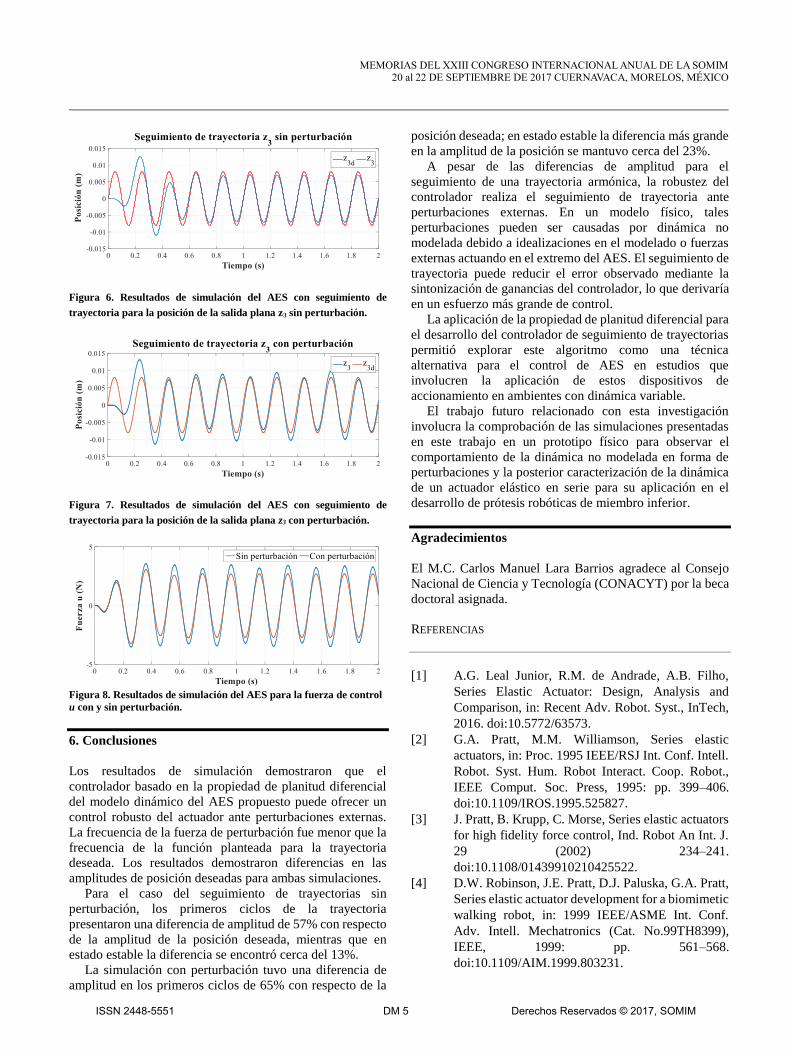
La Figura 6 muestra los resultados obtenidos del
seguimiento de trayectoria en la simulación del prototipo
virtual del AES dentro del ambiente de ADAMS View en
co-simulación con el controlador en Simulink basado en la
propiedad de planitud diferencial. En esta simulación no se
consideró perturbación sobre las masas del modelo
dinámico. Se observó el seguimiento de la trayectoria
deseada en la respuesta para 3z .
En la Figura 7 se muestra la respuesta obtenida al aplicar
una perturbación armónica modelada con la ec. (22) sobre la
masa 2m correspondiente a la salida plana 3z . Se observó
la compensación de la perturbación a partir del controlador
por planitud diferencial para alcanzar el seguimiento de
trayectoria.
2 0.005sin2
d t
(22)
Al graficar la fuerza de control u para ambos casos, se
observó una diferencia de amplitud entre la simulación sin
perturbación y la simulación con perturbación. La
comparación de la fuerza de control en estos dos casos se
muestra en la Figura 8.
ISSN 2448-5551 DM 4 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Figura 6. Resultados de simulación del AES con seguimiento de
trayectoria para la posición de la salida plana z3 sin perturbación.
Figura 7. Resultados de simulación del AES con seguimiento de
trayectoria para la posición de la salida plana z3 con perturbación.
Figura 8. Resultados de simulación del AES para la fuerza de control
u con y sin perturbación.
6. Conclusiones
Los resultados de simulación demostraron que el
controlador basado en la propiedad de planitud diferencial
del modelo dinámico del AES propuesto puede ofrecer un
control robusto del actuador ante perturbaciones externas.
La frecuencia de la fuerza de perturbación fue menor que la
frecuencia de la función planteada para la trayectoria
deseada. Los resultados demostraron diferencias en las
amplitudes de posición deseadas para ambas simulaciones.
Para el caso del seguimiento de trayectorias sin
perturbación, los primeros ciclos de la trayectoria
presentaron una diferencia de amplitud de 57% con respecto
de la amplitud de la posición deseada, mientras que en
estado estable la diferencia se encontró cerca del 13%.
La simulación con perturbación tuvo una diferencia de
amplitud en los primeros ciclos de 65% con respecto de la
posición deseada; en estado estable la diferencia más grande
en la amplitud de la posición se mantuvo cerca del 23%.
A pesar de las diferencias de amplitud para el
seguimiento de una trayectoria armónica, la robustez del
controlador realiza el seguimiento de trayectoria ante
perturbaciones externas. En un modelo físico, tales
perturbaciones pueden ser causadas por dinámica no
modelada debido a idealizaciones en el modelado o fuerzas
externas actuando en el extremo del AES. El seguimiento de
trayectoria puede reducir el error observado mediante la
sintonización de ganancias del controlador, lo que derivaría
en un esfuerzo más grande de control.
La aplicación de la propiedad de planitud diferencial para
el desarrollo del controlador de seguimiento de trayectorias
permitió explorar este algoritmo como una técnica
alternativa para el control de AES en estudios que
involucren la aplicación de estos dispositivos de
accionamiento en ambientes con dinámica variable.
El trabajo futuro relacionado con esta investigación
involucra la comprobación de las simulaciones presentadas
en este trabajo en un prototipo físico para observar el
comportamiento de la dinámica no modelada en forma de
perturbaciones y la posterior caracterización de la dinámica
de un actuador elástico en serie para su aplicación en el
desarrollo de prótesis robóticas de miembro inferior.
Agradecimientos
El M.C. Carlos Manuel Lara Barrios agradece al Consejo
Nacional de Ciencia y Tecnología (CONACYT) por la beca
doctoral asignada.
REFERENCIAS
[1] A.G. Leal Junior, R.M. de Andrade, A.B. Filho,
Series Elastic Actuator: Design, Analysis and
Comparison, in: Recent Adv. Robot. Syst., InTech,
2016. doi:10.5772/63573.
[2] G.A. Pratt, M.M. Williamson, Series elastic
actuators, in: Proc. 1995 IEEE/RSJ Int. Conf. Intell.
Robot. Syst. Hum. Robot Interact. Coop. Robot.,
IEEE Comput. Soc. Press, 1995: pp. 399–406.
doi:10.1109/IROS.1995.525827.
[3] J. Pratt, B. Krupp, C. Morse, Series elastic actuators
for high fidelity force control, Ind. Robot An Int. J.
29 (2002) 234–241.
doi:10.1108/01439910210425522.
[4] D.W. Robinson, J.E. Pratt, D.J. Paluska, G.A. Pratt,
Series elastic actuator development for a biomimetic
walking robot, in: 1999 IEEE/ASME Int. Conf.
Adv. Intell. Mechatronics (Cat. No.99TH8399),
IEEE, 1999: pp. 561–568.
doi:10.1109/AIM.1999.803231.
ISSN 2448-5551 DM 5 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
[5] F.C. Sup, M. Goldfarb, Design of a Pneumatically
Actuated Transfemoral Prosthesis, in: Dyn. Syst.
Control. Parts A B, ASME, 2006: pp. 1419–1428.
doi:10.1115/IMECE2006-15707.
[6] F. Sup, A. Bohara, M. Goldfarb, Design and Control
of a Powered Knee and Ankle Prosthesis, in: Proc.
2007 IEEE Int. Conf. Robot. Autom., IEEE, 2007:
pp. 4134–4139. doi:10.1109/ROBOT.2007.364114.
[7] N.P. Fey, A.M. Simon, A.J. Young, L.J. Hargrove,
Controlling Knee Swing Initiation and Ankle
Plantarflexion With an Active Prosthesis on Level
and Inclined Surfaces at Variable Walking Speeds,
IEEE J. Transl. Eng. Heal. Med. 2 (2014) 1–12.
doi:10.1109/JTEHM.2014.2343228.
[8] S. Pfeifer, Finding Best Predictors for the Control of
Transfemoral Prostheses, in: 9. Work.
“Automatisierungstechnische Verfahren Für Die
Medizin” (Automed Work. 2010), VDI Verlag,
2010: pp. 39–40. http://e-
citations.ethbib.ethz.ch/view/pub:42770 (accessed
January 26, 2017).
[9] Chengkun Zhang, S.K. Agrawal, Design of a
passive transfemoral prosthesis using differential
flatness theory, in: 2013 IEEE Int. Conf. Robot.
Autom., IEEE, 2013: pp. 2189–2193.
doi:10.1109/ICRA.2013.6630871.
[10] A.M. El-Sayed, N.A. Hamzaid, N.A. Abu Osman,
Technology Efficacy in Active Prosthetic Knees for
Transfemoral Amputees: A Quantitative
Evaluation, Sci. World J. 2014 (2014) 1–17.
doi:10.1155/2014/297431.
[11] M. Fliess, J. Lévine, P. Martin, P. Rouchon, Flatness
and defect of non-linear systems: introductory
theory and examples, Int. J. Control. 61 (1995)
1327–1361. doi:10.1080/00207179508921959.
[12] H. Sira-Ramírez, S.K. Agrawal, Differentially Flat
Systems, Taylor & Francis, New York, 2004.
ISSN 2448-5551 DM 6 Derechos Reservados © 2017, SOMIM










![“Diseño conceptual y fabricación de un prototipo de ...revistasomim.net/congreso2017/articulos/A1_154.pdf · los inventos por medio de patentes y modelos de utilidad [3]. ...](https://static.fdocument.pub/doc/165x107/5baf0c7209d3f2b5718dda34/diseno-conceptual-y-fabricacion-de-un-prototipo-de-los-inventos-por.jpg)







