

MAK669 LINEER ROBUST KONTROL -...
40
Transcript of MAK669 LINEER ROBUST KONTROL -...

2 2
lineer sistemi sadece ve sadece bütün kökleri
sol yarı düzlemde ise kararlıdır yani
Re{ ( )} 0,
A gibi bir matris böyle bir özelliğe sahipse "kararlı"
veya Hurw
: (
it
)
i
Teorem Hur
x Ax
t
A
B
w z
u
i
i
z denir. Karekteristik denklemin kökleri
0
bulunur.
sI A
Kararlılık analizi

Sistem kararlılığı
-
+ +
+
d
er( )K s ( )G s
yu
When a dynamic system is just described by its input/output relationship such as a transfer function (matrix), the system is stable if it generates bounded outputs for any bounded inputs. This is called the bounded-input-bounded-output (BIBO) stability. For a linear, time-invariant system modeled by a transfer function matrix (G(s) ), the BIBO stability is guaranteed if and only if all the poles of G(s) are in the open-left-half complex plane, i.e. with negative real parts.
1( ) ( )G s C sI A B D (I)
An essential issue in control-systems design is the stability. An unstable system is of no practical value. This is because any control system is vulnerable to disturbances and noises in a real work environment, and the effect due to these signals would adversely affect the expected, normal system output in an unstable system.
Sistem kararlılığı
When a system is governed by a state-space model such as (II), a stability concept called asymptotic stability can be defined. A system is asymptotically stable if, for an identically zero input, the system state will converge to zero from any initial states. For a linear, time-invariant system described by a model of (II), it is asymptotically stable if and only if all the eigenvalues of the state matrix A are in the open-left-half complex plane, i.e. with positive real parts.
( ) ( ) ( )
( ) ( ) ( )
x t Ax t Bu t
y t Cx t Du t
(II)
5
The concept of Lyapunov stability is one of the most prominent
and fundamental in dynamics and control. It is primarily
concerned with analyzing behavior of system trajectories near
equilibrium but without explicit computation of those solutions.
System stability can be interpreted as a continuity of the
system trajectories, with respect to initial conditions, over
infinite time interval. The keywords here are “over infinite time
interval.” They highlight the difference between the notions of
the stability and continuity on initial conditions.
Lyapunov kararlılık tanımı-
yörüngesel kararlılık

1 2
Sistemin aşağıdaki şekilde tanımlandığını düşünelim.
( , ) (1)
Burada durum vektörüdür ve ( , ) elemanlarının
, , , ve nin fonksiyonu olduğu bir n-vektördür.
Den
n
x f x t
x f x t
x x x t
0 00 0
0
klem (1) deki sistemin verilen bir başlangıç değerinde başlayan
. Bu çözümü gözlemlenen zaman olmak üzere
olarak gösterelim. Burada
tek
,
b
dir. Buradan
ir çözümü ol
(
( ;
u
,
n
;
s
) t x
t
x x t t
t x
t
0 0 0, )
yazılabilir.
t x
Lyapunov kararlılık analizi

: (1) sisteminde gibi bir durum vektorü
( , ) 0 (bütün değerleri için) (2)
sağlıyor ise sistem denge durumundadır denir. Eger sistem
l
D
i
enge durumu
neer ve zamandan b
e
e
x
f x t t
ağımsız bir sistem ise
( , )
( singüler degil ise).
Eger singüler ise sonsuz sayıda denge durumu vardır.
Nonlineer sistemlerde bir
tek bir denge durumu var
veya birden çok denge
durumu ol
d r
abi
ı
ef x t Ax
A
A
lir. Bu durum değişkenleri sistemin sabit
çözümlerine karşılık gelir ( bütün değerleri için).
Denge durumlarının bulunması sistemin deferansiyel denklemini
yani denklem (1) in çözümünü gerektirmez
ex x t
fakat sadece (2)
denkleminin çözümünü gerektirir.
Lyapunov kararlılık analizi

8 8
2 2 2 1/2
1 1 2 2
gibi bir denge durumu etrafını yarıçapı olan küresel bir bölge ile
Lyapunov anlamında kararlılı
gösterelim.
[( ) ( ) ( ) ] Euclid
k:
ean norm
( ) bölgesi aşağıdaki b
e
e
e e e n ne
x k
x x k
x x x x x x x x
S
0 0 0
ütün noktalardan ibaret olsun:
( ) bölgesi de aşağıdaki bütün noktalardan ibaret olsun:
( ; , ) için
e
e
x x
S
t x t x t t
Lyapunov kararlılık analizi
0xex
( )S
( )S

0x
xex
9 9
Kararlı Kararsız
Lyapunov kararlılık analizi
(1) denklemindeki sistemin gibi bir denge durumu olsun.
Eger zaman sonsuza doğru artarken ( ) bölgesinde
başlayan ( ) bölgesini terk etmeyen ( ) yörüngesi var ise
Lyapunov anlamında ka
r
arl
ex
t S
S S
0 0
denir. reel sayısı genelde
sayısına ve bağlıdır. Eğer sayısı bağlı değilse denge
durumu uniform olarak karar
ıdır
lı denir.
t t
0 0( ; , )t x t
10 10
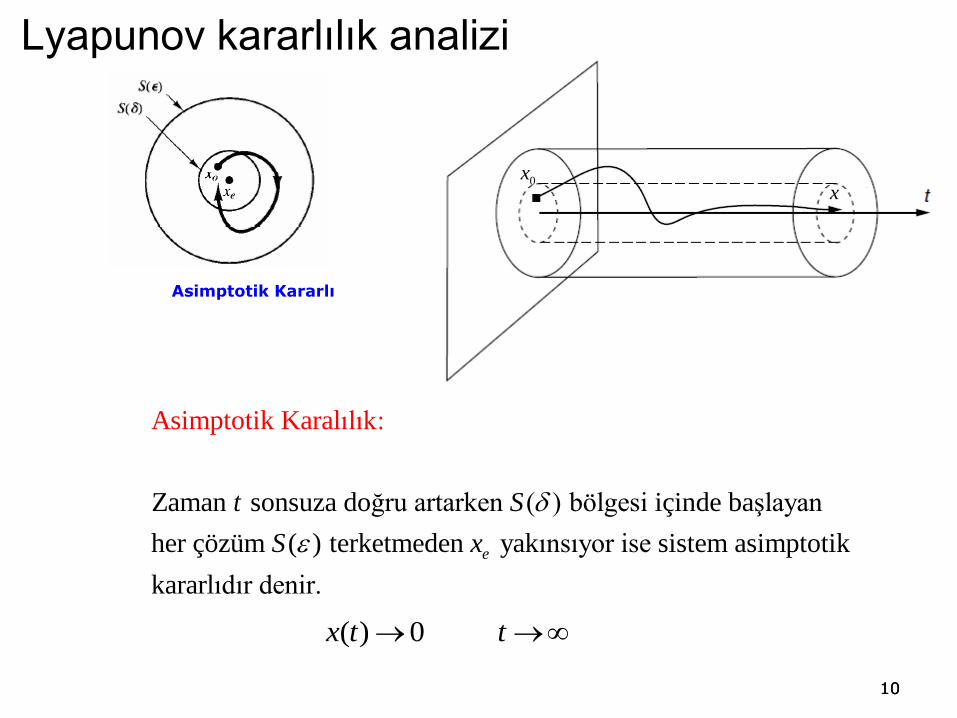
Asimptotik Kararlı
Zaman sonsuza doğru artarken ( ) bölgesi içinde başlayan
her çözüm ( ) terketmeden yakınsıyor ise sist
Asimptotik Karalıl
em asimptotik
kararlıdır denir.
ık:
e
t S
S x
( ) 0 x t t
Lyapunov kararlılık analizi
0xx
11 11
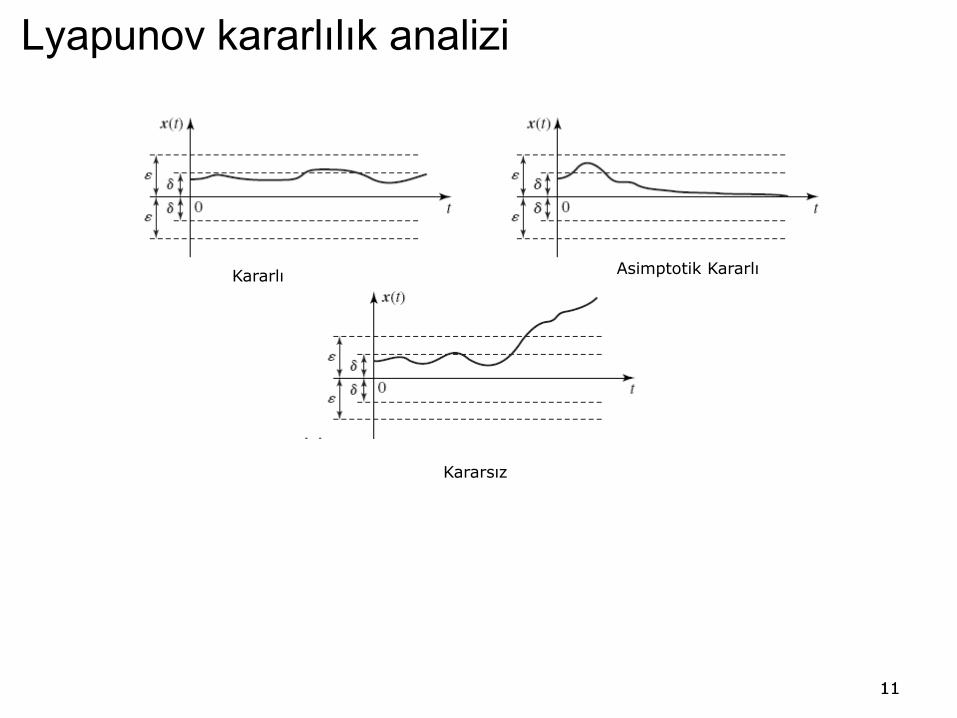
Lyapunov kararlılık analizi
Kararlı Asimptotik Kararlı
Kararsız

12 12
Küresel bölgede her bir durum değişkeninin ve
tanımlı bölgelerin düzlem üzerindeki
iz düşümü:
Lyapunov kararlılık analizi

13
0 0 0
0
Let ( ; ) denote a solution of (1) with the initial condition ( ) . Suppose that
this solution is unique and exists on a finite, possibly open-ended interval [ , ).
The continuity property of
x t x x t x
t T
0 0 ( ; ) due to changes in can be described as follows:
Given any positive constant 0, there must exist a sufficiently small positive
constant > 0, such that for all perturbed initial con
x t x x
0 0 0
0 0
0 0 0 0
ditions with ,
the corresponding perturbed solution ( ; ) deviates from the original
by no more than , that is, ( ; ) ( ; ) , for all .
Figure illustrates
x x x
x t x x
x t x x x t x t t T
the continuity property for a scalar system.
Lyapunov kararlılık analizi

14 14
Lyapunov kararlılık analizi
( , )
(0, ) 0 bütün değerleri için
sistemi eğer aşağıdaki şartları sağlayan bir Layapunov fonksiyonu
var ise asimtotik kararlıdır.
( ) 0 0
( ) 0 0
( ) 0 0
( ) 0
x f x t
f t t
V x x
V x x
V x x
V x x
0

15 15
( ) skalar fonksiyonu sıfır olmayan bütün durum değişkenleri için ( ) 0 sağlıyors
Pozitif tanımlı(posit
pozitif tanımlıdır
a
de
ive definite) skalar fon
nir. Sadece durum uzayının orijininde (
ksiyon:
V x x V x
V
Negatif tanımlı skalar fonksiyon:
Pozitif yarı tanımlı(positive semide
0) 0.
Eğer ( ) pozitif tanımlı ise
finite) skalar fonksiyon
( ) denir.
( ) fonksi
negatif tanımlıdır
yonu orijinde ve bazı dur
:
um d
V x V x
V x
Tan
eği
ıms
şkenle
ız ska
rinde sıfır
lar fonksiyo
olup
diğer bütün durum değişkenlerinde pozitifse denir.
Hem pozitif ve hemde negatif değerler alıyorsa V(x)
pozitif yarı tanımlıdır
tanımsız skalar
fon
n:
ksiyon denir.
2 2
1 2
2
1 2
2 2
1 1 2
2
1 2 2
( ) 2 pozitif tanımlı
( ) ( ) pozitif yarı tanımlı
( ) (3 2 ) negatif tanımlı
( ) tanımsız
V x x x
V x x x
V x x x x
V x x x x
Lyapunov kararlılık analizi
16 16
Lyapunov kararlılık analizi
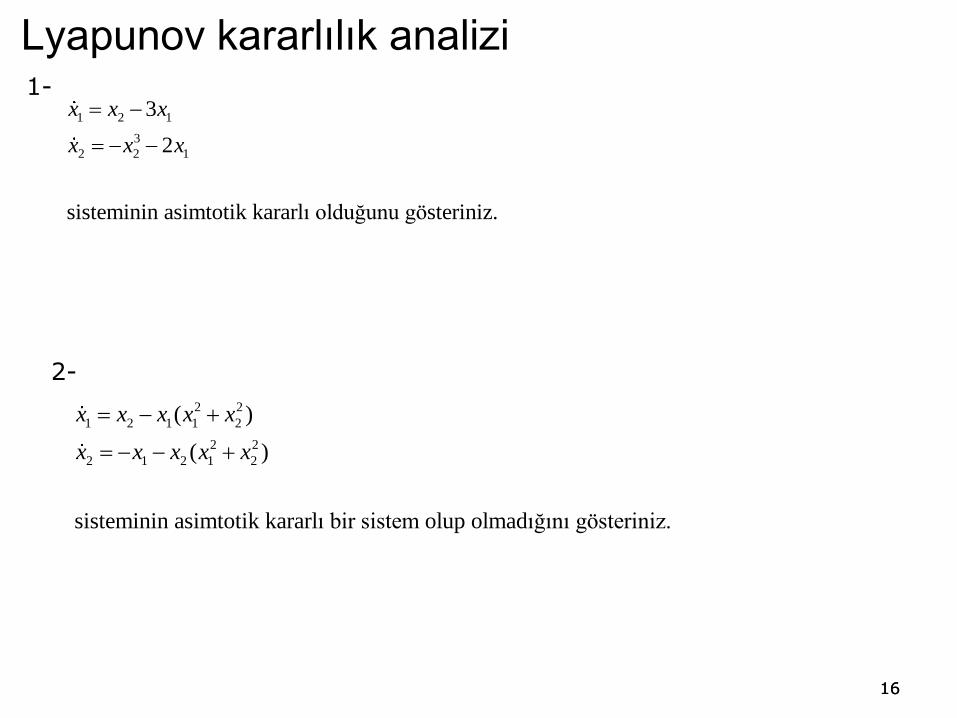
1 2 1
3
2 2 1
3
2
sisteminin asimtotik kararlı olduğunu gösteriniz.
x x x
x x x
2 2
1 2 1 1 2
2 2
2 1 2 1 2
( )
( )
sisteminin asimtotik kararlı bir sistem olup olmadığını gösteriniz.
x x x x x
x x x x x
1-
2-

17 17
Ödev
1 2
2 1 2
2 2
1 1 2
2 2
2 1 2 1 2
2 2
3 1 2 1 2
6 5
sisteminin
1 6
2
3 2
aday Lyapunov fonksiyonlari icin
asimtotik kararlı olup olmadiğini gösteriniz.
x x
x x x
V x x
V x x x x
V x x x x
2 2
1 1 1 2 2
2 2
2 1 2 1 2
( 1)
( 1)
sisteminin asimtotik kararlı
bir sistem olup olmadığını gösteriniz.
x x x x x
x x x x x
1- 2-
18 18
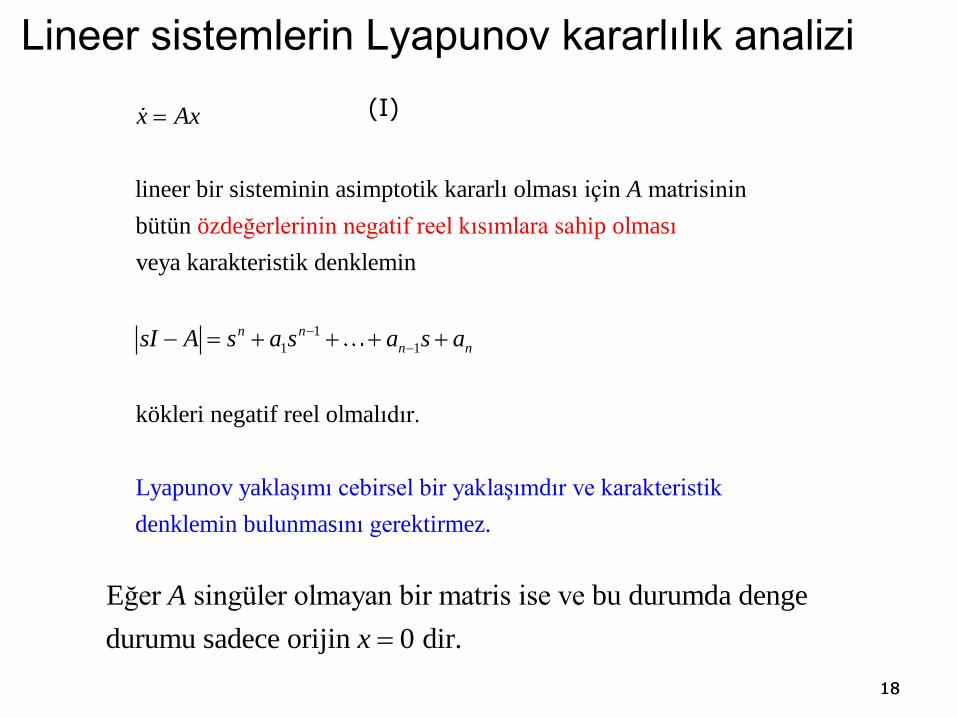
1
1 1
özdeğerlerinin negatif reel kısımlara sahip olmas
lineer bir sisteminin asimptotik kararlı olması için matrisinin
bütün
veya karakteristik denklemin
kökleri negatif r
ı
eel
n n
n n
x Ax
A
sI A s a s a s a
Lyapunov yaklaşımı cebirsel bir yaklaşımdır ve karakteristik
denklemin bulunmasını ger
o
e
lmalıd
kti
ır.
rmez.
Eğer singüler olmayan bir matris ise ve bu durumda denge
durumu sadece orijin 0 dir.
A
x
Lineer sistemlerin Lyapunov kararlılık analizi
(I)
19 19
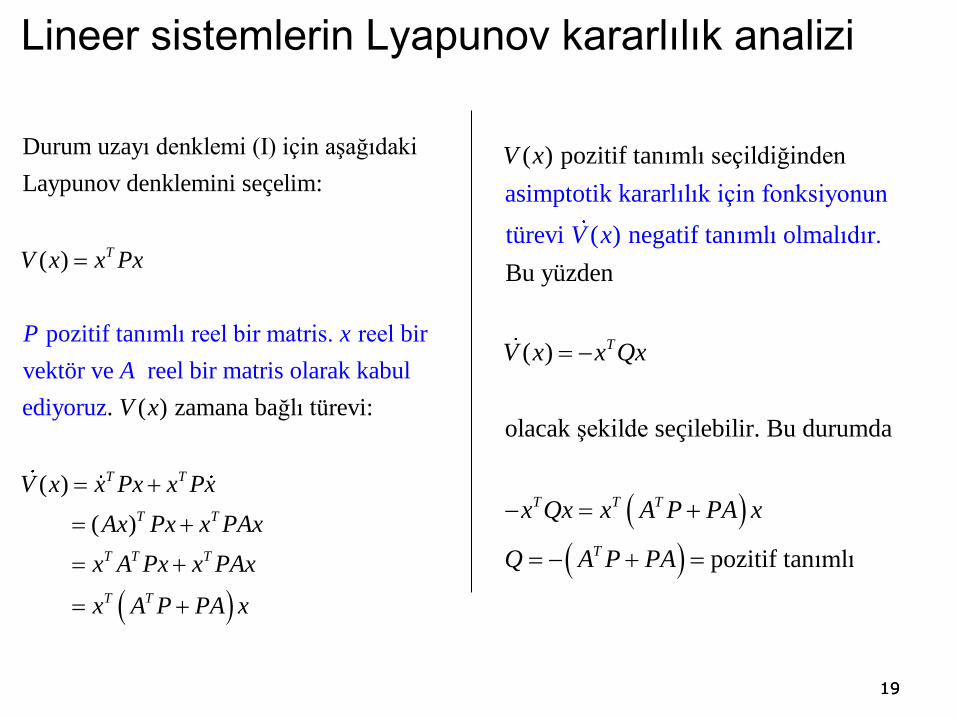
asimptotik kararlılık için fonksiyonun
türevi ( ) negatif tanımlı
( ) pozitif tanımlı seçildiğinden
Bu yüzden
( )
olacak şekilde
olmalıd
seçilebilir. Bu durumda
poz
ır.
i
T
T T T
T
V x
V x x Qx
x Qx x A P PA x
Q A P
V x
PA
tif tanımlı
Lineer sistemlerin Lyapunov kararlılık analizi
pozitif tanımlı reel bir matris. reel bir
Durum uzayı denklemi (I) için aşağıdaki
Lay
vektör ve reel bir matris olarak kabul
punov denklemini seçelim:
( )
. ( ) zamana bağlı tür
ed eiyoruz vi:
TV x x Px
V x
P x
A
( )
( )
T T
T T
T T T
T T
V x x Px x Px
Ax Px x PAx
x A Px x PAx
x A P PA x

20 20
pozitif tanımlı seçiliyor
pozitif tanımlı mı
V
erilen yakl
diye kontrol ediliyor
aşımda:
P
Q
Eger pozitif tanımlı seçilir nin pozitif tanımlı olup olmadığına
karar verilirse
TA P
Q P
PA Q
seçilirse
T
Q I
A P PA I
Lineer sistemlerin Lyapunov kararlılık analizi
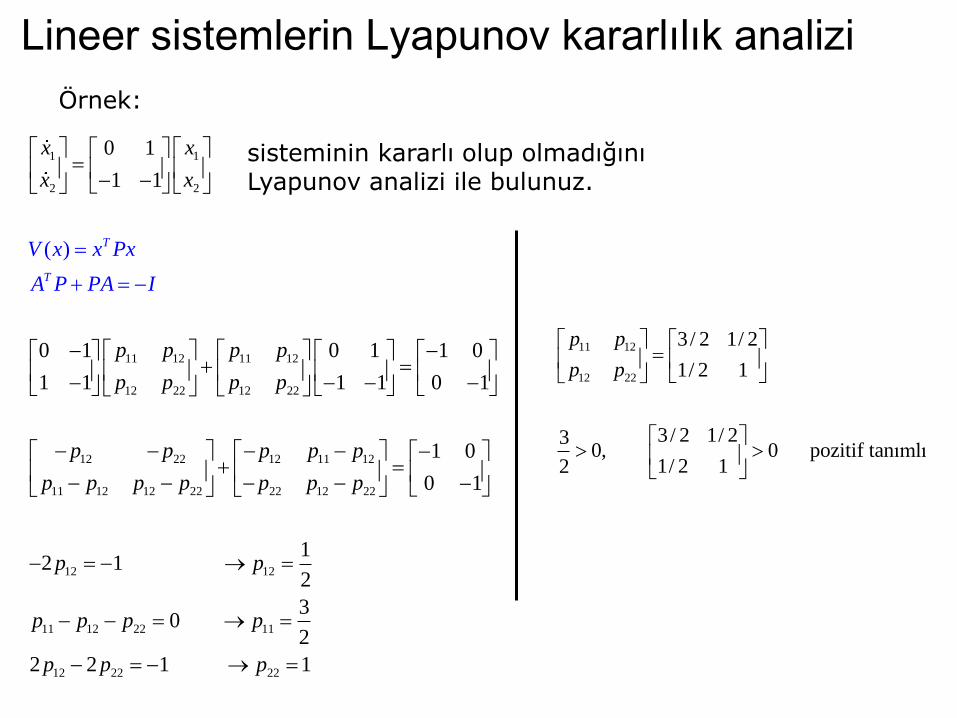
1 1
2 2
11 12 11 12
12 22 12 22
12 22 12 11 12
11 12 12 22 22 12 22
0 1
1 1
0 1 0 1 1 0
1 1 1 1 0 1
1 0
0 1
2
( ) T
T
x x
x x
p p p p
p p p p
p p p p p
p p p p p
V x x Px
A P PA I
p p
p
12 12
11 12 22 11
12 22 22
11
2
30
2
2 2 1 1
p
p p p p
p p p
11 12
12 22
3/ 2 1/ 2
1/ 2 1
3/ 2 1/ 230, 0 pozitif tanımlı
1/ 2 12
p p
p p
Örnek:
Lineer sistemlerin Lyapunov kararlılık analizi
sisteminin kararlı olup olmadığını Lyapunov analizi ile bulunuz.

1 2 2
1 2 1 1 2 2
2
1 2 1 2 1 2
1 2
1
1
2
P yerine yazılırsa Lyapunov fonksiyonu:
3 11 1( ) (3 2 2 )
1 22 2
Lyapunov fonksiyonunun türevi elde edilirse:
(3 ) (2 )
(3
( )
T
dx dxV VV x
x dt x
xV x x Px x x x x x
dt
xx
x x x x x x
x x
1
2 2 1
2
1 1
1 2 2 1 2 1 1 2
2 2
2 2
2 1 1
2
2 1 2
2
1 2
) (2 )
0 1(3 ) (2 ) ( 2 ) (2 )
( ) ( )
1 1
2 2
Ax
xx x
x
x xx x x x x x
V x x x
x xx x
x x x x x x
Lineer sistemlerin Lyapunov kararlılık analizi

1 1 1 1 1 1 2 1 2 2 1 2
2 2 2 2 1 2 2 1
1 1 1 2 2 1 1 2 2 1
2 2 2 2 2 2 2 2
1
2
( ) ( )
( ) ( )
0 0
0 0
0
m y k y c y k y y c y y
m y k y y c y y
m y c c c y k k k y
m y c c y k k y
yMq Cq Kq q
y
1c 1k
2m
1m
2c2k
1y
2y
Mekanik sistemler ve Lyapunov fonksiyonu
2 2
1 1 2 2
2 2
1 1 2 2 1
2 2 2 2
1 1 2 2 1 1 1 2 2
1( )
2
1[ ( ) ]
2
1( ( ) )
2
KE m y m y
PE k y k y y
TE k y k y y m y m y
kinetik enerji denklemi
potansiyel enerji denklemi
toplam enerji denklemi

Mekanik sistemler ve Lyapunov fonksiyonu
1 1
1 2 2 1
2 2 2
1 2 1 2
1 1
2 2
1 2 1 2
0,
01, pozitif tanımlı secilsin.
02
0 0
0 01
0 0 02
0 0 0
1( )
2
T
x Ax
q Ix A
q M K M C
KV x Px P
M
k k k y
k k yV y y y y
m y
m y
k k y k y
22 2 1
1
2
2 2 1 2 2 1 1 2 2
1
2
2 2 2 2 2
1 1 2 1 2 2 1 2 1 2 2
2 2 2 2
1 1 2 2 1 1 1 22 1 1 2 2
( )Toplam enerji
2
11( )
2( ( ) )
2k y y
y
yk y k y m
k
y m yy
y
k y k y k y y k y y k y m y m y k y y m y m yy
Lyapunov fonksiyonu mekanik sistemlerde örnekte oldugu gibi sistemin toplam enerji ile ilişkilendirilebilir.

Mekanik sistemler ve Lyapunov fonksiyonu
Mekanik bir sistemde Lyapunov
fonksiyonunun türevinin
0
olması demek sistemin toplam
enerjisinin
ile sistemin toplam
enerjisinin
azalması anlamındadır.
Dola
zamanla azalması kararlı
bir
yı
s t
sı
is em
V
oldugunu gösterir.
Seçilen P ve sistem matrisi A aşağıdaki eşitliği sağlaması için Q:
0 00
0
olarak bulunur. Bu sonuçtan Q pozitif fakat singuler
olduğundan dolayı Lyapunov kararlılık krite
TA P PA Q QC
ri olarak
çok küçük bir sayı olmak üzere 0 ve P aşağıdaki şekilde
seçilirse:
01 1
0 02 2 2
pozitif tanımlı bir
sisteminin kararlı
matr
olduğunu ispat
i t
l m
s
a az.
K C M K C MP
M M M M
P
x Ax
ir. Bu durumda Q
0
0
olarak bulunur. Yeterince küçük 0 için
pozitif tanımlı aynı zamanda Q pozitif
tanımlıdır. Bu nedenle sistemi kararlıdır.
KQ
C M
C M
x Ax
26 26
Kontrol edilebilirlik
1
1 1
0
şeklindeki dinamik bir sistem veya ( , ) matris
çifti herhangibir 0 zamanında
ve herhangibir (0) başlangıç şartında iken
eğer sistem durum vektörünü
Tanım:
( ) gibi sonlu
bir de
x t x
x Ax Bu
A B
t
x x
ğere yaklaşmasını sağlayan
kontrol edilebilirdir.
Diğer durumlarda ( , ) kontrol edilebilir değildi
( ) gibi bir giriş
r
varsa
.A B
u t
27 27
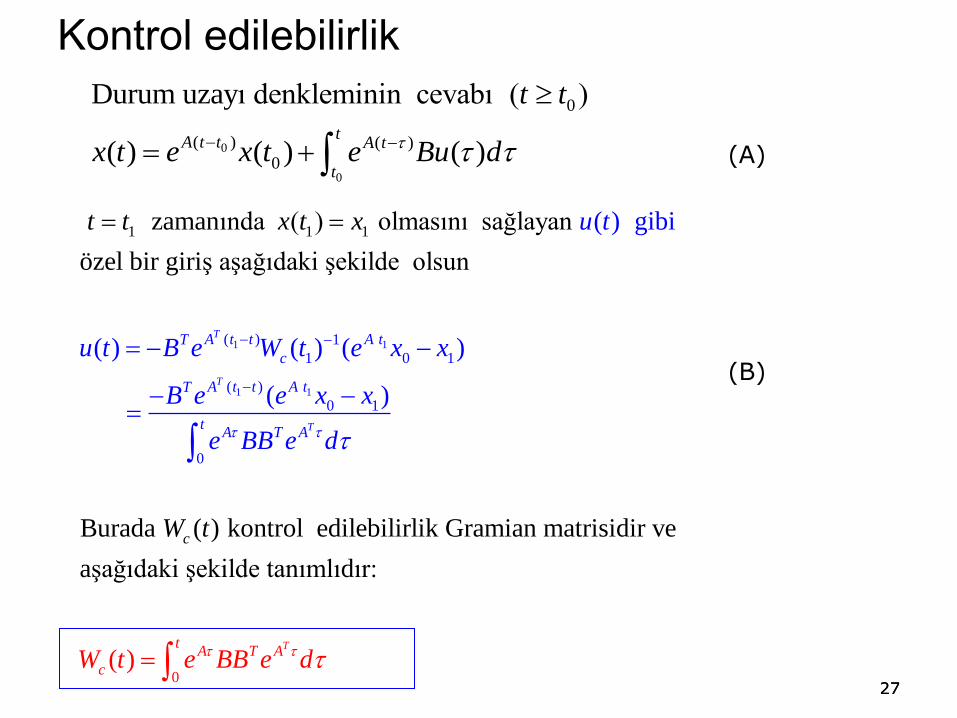
Kontrol edilebilirlik
0
0
0
( ) ( )
0
Durum uzayı denkleminin cevabı ( )
( ) ( ) ( )t
A t t A t
t
t t
x t e x t e Bu d
1 1
1 1
( ) 1
1 0 1
1
( )
0 1
0
1 1 zamanında ( ) olmasını sağlayan
özel bir giriş aşağıdaki şekilde olsun
( ) gibi
( ) ( ) ( )
Burada ( ) kontrol
( )
T
T
T
A t t A tT
c
A t t A tT
c
tA T A
u t
u t B e W t e x x
B e
t t
e x
x t
x
e BB e
x
W
d
t
0
edilebilirlik Gramian matrisidir ve
aşağıdaki şekilde tanıml
(
ı ır:
)
d
TtA T A
cW t e BB e d
(A)
(B)
28 28
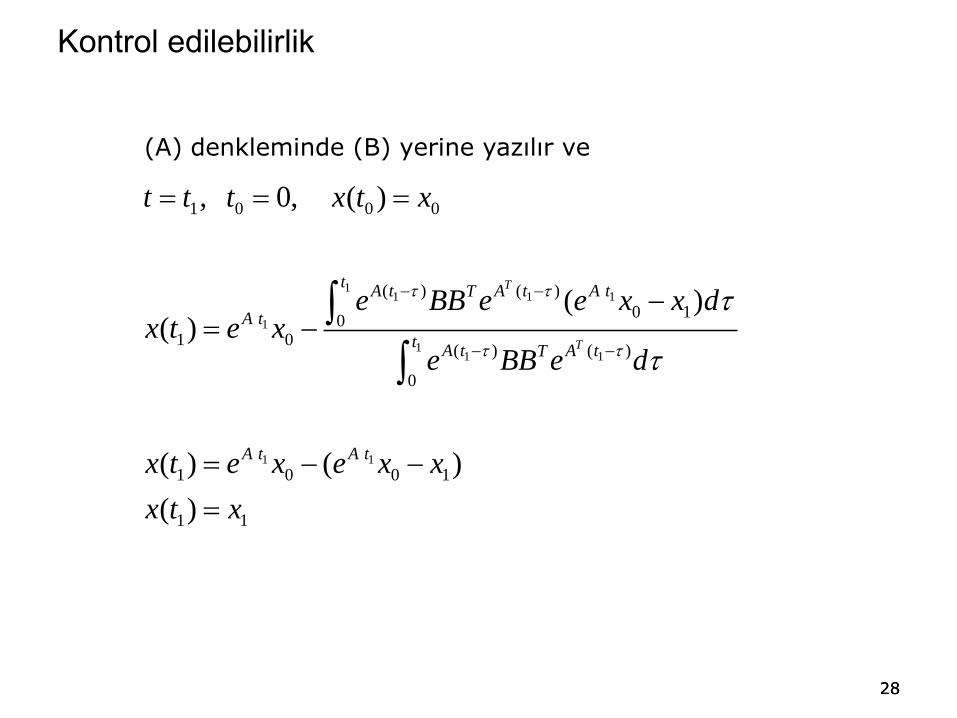
Kontrol edilebilirlik
11 1 1
1
11 1
1 1
1 0 0 0
( ) ( )
0 1 01 0
( ) ( )
0
1 0 0 1
1 1
, 0, ( )
( )( )
( ) ( )
( )
T
T
tA t A t A tT
A t
tA t A tT
A t A t
t t t x t x
e BB e e x x dx t e x
e BB e d
x t e x e x x
x t x
(A) denkleminde (B) yerine yazılır ve

0
0
( ) ( )
0
1 0
Bir önceki çözüm özel bir durum için yapıldı.
Genel kontrol edilebilirlik için durum uzayı denkleminin çözümünü
düşünelim:
( ) ( ) ( )
, 0 ve durum uzayının alacağı son
tA t t A t
tx t e x t e Bu d
t t t
11 1
11 1
11 1
1
1
( )
10
( )
0
0
( )
0
değer ( ) 0 kabul edersek:
( ) 0 (0) ( )
(0) ( )
(0) ( )
elde ed(0 il) .( ) ir
tAt A t
tAt A t
tAt A
A
t
t
x t
x t e x e Bu d
e x e Bu d
x e e Bu
x e Bu
d
d
Kontrol edilebilirlik matrisinin elde edilmesi

1
1
1
2 1
0 1 2 1
1
0
1
00
1
0
0
0
( ) ( ) ( ) ( ) , ( 0,1,2, 1)
oldugundan
( ) yazılabi
(0) ( )
lir.
(0) ( ) ( )
(0) ( )
(
At m
m
nA
t
k
k
k
ntk
k
k
n
A
tk
k
x e Bu d
e t I t A t A t A k m
e A
x A Bu d
x A B u
1
0
1
0
0
11
Kontrol edilebilirlik matrisi
1
)
( ) ( ) kabul edilirse
(0)
t
k
nk
k
k
n
n
d
u d
x A B
B AB A B
Kontrol edilebilirlik matrisinin elde edilmesi

31 31
Bir sistemin kontrol edilebilir olduğunu test etmenin bir çok yolu olmakla
birlikte birinci yöntem kontrol edilebilirlik matrisinin rankına bakmaktır.
( , ) sisteminin kontrol edilebilir olması içinA B
1
sadece ve sadece kontrol
edilebilirlik matrisi
rankının (tam rank) olması gerekir. Burada durum değişkeni sayısıdır.
nM B AB A B
n n
Kontrol edilebilirlik matrisi

Bir sistemin kontrol edilebilirligini hesaplamanin diger bir yolu
kontrol Gramian matrisinin hesaplanmasıdır.
( , ) sisteminin kontrol edilebilir olması için 0 herhangibir zaman için
sadece ve sade
A B t
(
ce Gramian matrisi ( ) nin tam rank(pozitif tanımlı)
olması gerekir.
Kararlı bir sistem için şeklinde kabul edebiliriz yani
( , ) sisteminin kontrol edilebilir ise kontrol edilebilirlik Gram
)
c
cP W
W t
A B
0
ian:
pozitif tanımlı 0 ve tam ranka sahiptir. aşağıdaki Lyapunov denkleminin
çözümünden elde edilir.
TtA T A
T T
P e BB e d
P P
AP PA BB
Kontrol edilebilirlik Gramian matrisi

1 1
2 2
1
2
2 0 1
3 5 0
1 1
x xu
x x
xy
x
1 1
2
1 2
0 3
n
n
M B A B
2 0 1 2
3 5 0 3AB
rank(M)=2 sistem kontrol edilebilirdir.
Örnek 1:
Kontrol edilebilirlik

1 1
2 2
1
2
2 0 1
3 5 0
1 1
x xu
x x
xy
x
Kontrol edilebilirlik
% ornek 2 A=[ -2 0 ; 3 -5]; B=[1;0]; C=[1 -1]; D=0; %Kontrol edilebilirlik sys=ss(A,B,[],[]); Wc=gram(sys,'c') n=rank(Wc) % Lyapunov denklemi kullanarak Wc1=lyap(A,B*B') n1=rank(Wc1)
Örnek 2:
kontrol edilebilirligini kontrol Gramian matrisi ile bulunuz.

0 1
0 1
Eger u(t) kontrol girişi zaman aralığında
verilen herhangi bir ( ) başlangıç çıkış değerinden ( )
herhangi bir sonlu çıkış değerine transer ediyorsa
kontrol sistemi çıkış ola
x Ax Bu
y Cx Du
t t t
y t y t
2 1
( 1)
rak kontrol edilebilirdir.
çıkış kontrol edilebilir olması için matrisinin rankı
olmalıdır.
n
C m n
C
M CB CAB CA B CA B D
M
n
Çıkış kontrol edilebilirlik

1 0
1
şeklindeki dinamik bir sistem veya ( , ) matris çifti eğer
herhangibir 0 zamanındaki (0) baslangıç şartı olmak uzere
[0, ] zaman aralığında çıkış ( ) ni
Tanım:
ngiriş ( ) ve
x Ax Bu
y Cx D
y t
u
A C
t x x
t u t
bulunabiliyorsa ölçülebilir denir.
Aksi durumlarda ( , ) öl
zaman geçm
çülebilir d
işind
eği r.
en
ldiA C
Ölçülebilirlik
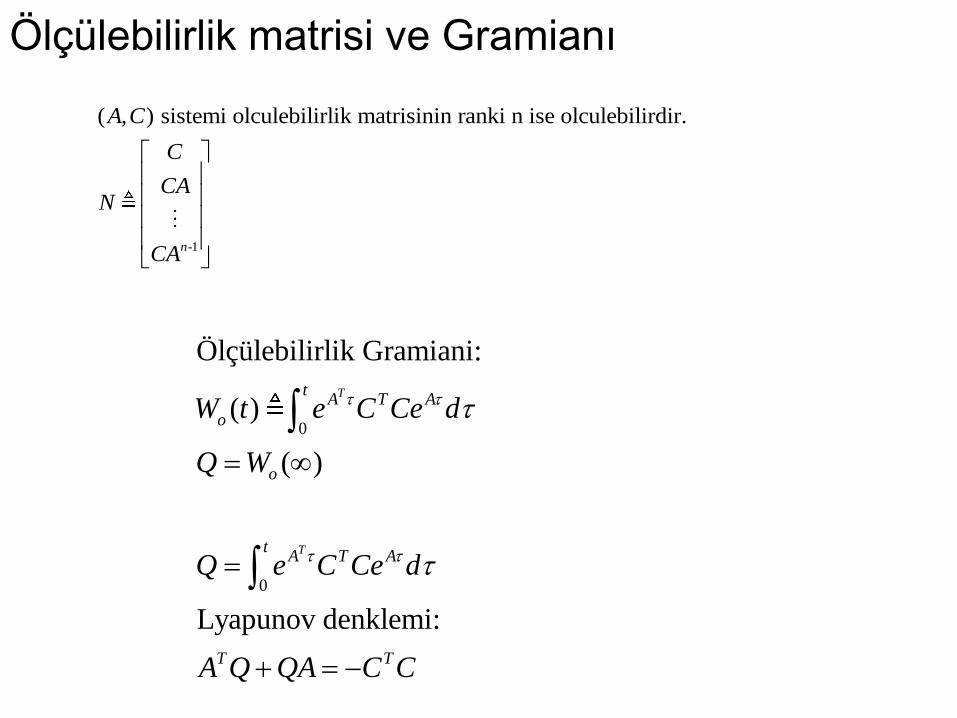
-1
( , ) sistemi olculebilirlik matrisinin ranki n ise olculebilirdir.
n
A C
C
CAN
CA
0
0
Ölçülebilirlik Gramiani:
( )
( )
Lyapunov denklemi:
T
T
tA T A
o
o
tA T A
T T
W t e C Ce d
Q W
Q e C Ce d
A Q QA C C
Ölçülebilirlik matrisi ve Gramianı

0
0
1
0
( ) ( )
0
0
[0, ] zaman aralığında verilen bir ( ) girişi
ve baslangıç şartı için sistemin çıkış cevabı:
( ) ( ) ( ) ( )
( ) 0, =0 kabul edilirse:
( ) (0)
tA t t A t
t
At
At
t u t
x
y t Ce x t Ce Bu d Du t
u t t
y t Ce x
e
1
0
1
0
1
0 1 1
0 1 1
1
( ) olduğundan
( ) ( ) (0)
( ) ( ) (0) ( ) (0) ( ) (0)
( ) ( ) ( ) ( ) (0)
nk
k
k
nk
k
k
n
n
n
n
t A
y t t CA x
y t t Cx t CAx t CA x
C
CAy t t t t x
CA
Ölçülebilirlik matrisinin elde edilmesi

Sensör
Aktüatör
1. Mod
2. Mod
3. Mod
Sensör ve aktüatorün 3. Modun nodal noktasına
yerleştirilmesinden dolayı 3. Modun hem kontrol
edilebilirliği hemde ölçülebilirliği yoktur.
Kontrol edilebilirlik ve ölçülebilirliğin fiziksel
olarak anlaşılması
1 1 2
2 2 1
( )
( )
mq k q q
mq k q q
1 1 2 2 3 1 4 2
1 1
2 2
3 3
4 4
, , , degisken donusumu
yapilirsa:
0 0 1 0
0 0 0 1
/ / 0 0
/ / 0 0
x q x q x q x q
x x
x xx Ax
x xk m k m
x xk m k m
1
1
2
1
3
1
1 1 0 0
0 0 1 1
0 0 0 0
0 0 0 0
( ) 2 Ölçülebilir i değ l
C
C AN
C A
C A
rank N
1
2
1 2
3
4
1
2
1
3
4
1 1 0 0
1 0 0 0
x
xy x x
x
x
x
xy x
x
x
1
1
2
1
3
1
1 0 0 0
0 0 1 0
-40 40 0 0
0 0 -40 40
( ) 4
C
C AN
C A
C A
rank N
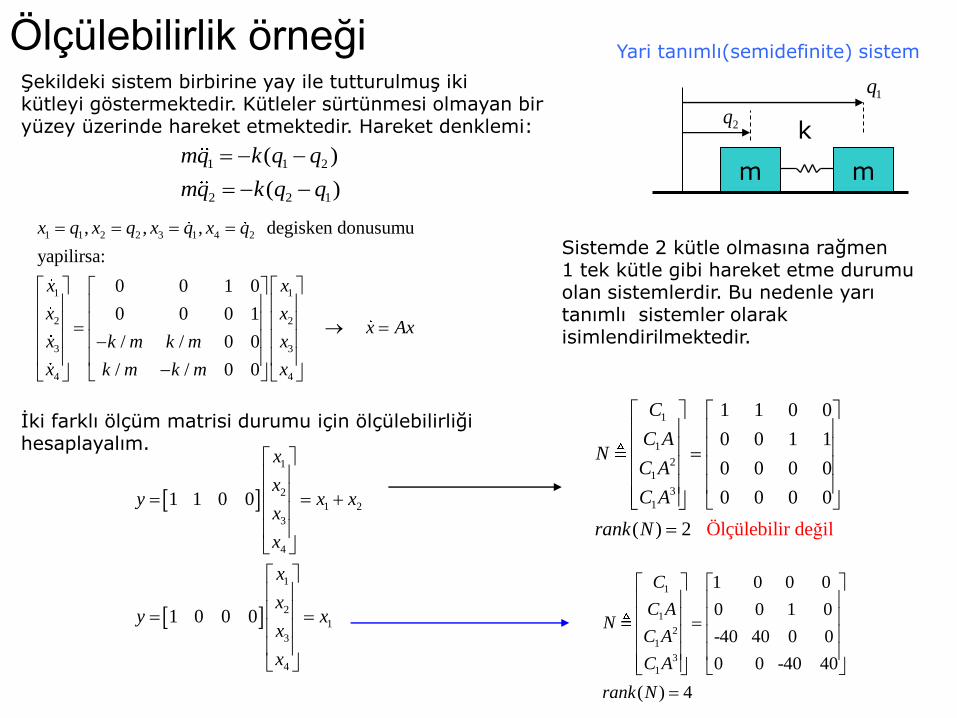
Yari tanımlı(semidefinite) sistem
2q
m m
k
1q
Ölçülebilirlik örneği Şekildeki sistem birbirine yay ile tutturulmuş iki kütleyi göstermektedir. Kütleler sürtünmesi olmayan bir yüzey üzerinde hareket etmektedir. Hareket denklemi:
İki farklı ölçüm matrisi durumu için ölçülebilirliği hesaplayalım.
Sistemde 2 kütle olmasına rağmen 1 tek kütle gibi hareket etme durumu olan sistemlerdir. Bu nedenle yarı tanımlı sistemler olarak isimlendirilmektedir.


















