
INFORME DE TAREAS REALIZADAS rev2 -...
63
INFORME DE TAREAS REALIZADAS PARA CULMINAR LA CONSTRUCCIÓN Y PUESTA EN MARCHA DEL LABORATORIO DE MÁQUINAS ELÉCTRICAS DE LA UNIVERSIDAD DE SAN BUENAVENTURA BOGOTÁ D.C. JULIÁN ANDRÉS VARELA GAITÁN UNIVERSIDAD DE SAN BUENAVENTURA FACULTAD DE INGENIERÍA INGENIERÍA MECATRÓNICA BOGOTÁ D.C. 2008
Transcript of INFORME DE TAREAS REALIZADAS rev2 -...

INFORME DE TAREAS REALIZADAS PARA CULMINAR LA CONSTRUCCIÓN Y PUESTA EN MARCHA DEL LABORATORIO DE MÁQUINAS ELÉCTRICAS
DE LA UNIVERSIDAD DE SAN BUENAVENTURA BOGOTÁ D.C.
JULIÁN ANDRÉS VARELA GAITÁN
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE INGENIERÍA
INGENIERÍA MECATRÓNICA
BOGOTÁ D.C.
2008
INFORME DE TAREAS REALIZADAS PARA CULMINAR LA CONSTRUCCIÓN Y PUESTA EN MARCHA DEL LABORATORIO DE MÁQUINAS ELÉCTRICAS
DE LA UNIVERSIDAD DE SAN BUENAVENTURA BOGOTÁ D.C.
JULIÁN ANDRÉS VARELA GAITÁN
Informe de tareas para optar al título de
Ingeniero Mecatrónico
Asesor
Alfonso Duque Jaramillo
Ingeniero Eléctrico
UNIVERSIDAD DE SAN BUENAVENTURA
FACULTAD DE INGENIERÍA
INGENIERÍA MECATRÓNICA
BOGOTÁ D.C.
2008

Nota de aceptación:
________________________________________
________________________________________
________________________________________
________________________________________
________________________________________
________________________________________
________________________________________
________________________________________
________________________________________ Firma de Asesor
________________________________________
Firma del Jurado
________________________________________
Firma del Jurado
Bogotá D.C.____, ______________ de 2008

CONTENIDO
INTRODUCCIÓN
1. PLANTEAMIENTO DEL PROBLEMA.
1.1 JUSTIFICACIÓN.
1.2 OBJETIVOS DEL PROYECTO.
1.2.1 OBJETIVO GENERAL.
1.2.2 OBJETIVOS ESPECÍFICOS.
2. DESARROLLO DE ACTIVIDADES.
3. DISEÑO DEL TACÓMETRO.
3.1 EL MICROCONTROLADOR.
3.1.1 LA ALIMENTACIÓN DE MICROCONTROLADOR.
3.1.2 EL OSCILADOR.
3.1.2.1 XT OSCILADOR CON CRISTAL DE CUARZO.
3.1.2.2 RC OSCILADOR CON RESISTENCIA Y CONDENSADOR.
3.1.2.3 OSCILADOR HS.
3.1.2.4 OSCILADOR LP.
3.1.2.5 OSCILADOR CON SEÑAL DE RELOJ EXTERNA.
3.1.3 EL RESET.
3.1.4 LA LCD (DISPLAY DE CRISTAL LÍQUIDO).
3.1.5 LA INTERFAZ AL COMPUTADOR.
3.2 CIRCUITO DEL DISEÑO COMPLETO.

3.3 PROGRAMACIÓN DEL MICROCONTROLADOR.
3.4 PROGRAMACIÓN DE LA INTERFAZ CON EL COMPUTADOR
UTILIZANDO LABVIEW.
4. CONCLUSIONES.

LISTA DE FIGURAS
Figura 1. Caja de conexión motores monofásicos (medidas en cm)
Figura 2. Esquema de conexión motor monofásico
Figura 3. Esquema circuito diodo emisor y diodo receptor.
Figura 4. Esquema circuito con disparador Smith Trigger.
Figura 5. Configuración típica de un oscilador de 16Mhz.
Figura 6. Configuración típica de un oscilador RC.
Figura 7. Configuración típica de una LCD para su
conexión a un microcontrolador.
Figura 8. Circuito de comunicación utilizando MAX232.
Figura 9. Diseño electrónico final del circuito del tacómetro.
Figura 10. Esquemático de elementos del tacómetro.
Figura 11. Máscara de pistas del tacómetro.
Figura 12. Máscara Antisolder del tacómetro.
Figura 13. Diagrama de flujo programa del microcontrolador.
Figura 14. Configuración del microcontrolador.
Figura 15. Interfaz numérica del programa.
Figura 16. Selección del puerto B0 y la naturaleza del pulso (flanco de
bajada).
Figura 17. Configuración del display de 2x16.
Figura 18. Configuración serial SCI (9600bps, 8 bits, impar)
Figura 19. Selección de la frecuencia de trabajo.
Figura 20. Ventana de programación de recursos.
Figura 21. Programación de estados.
Figura 22. Selección de variables.
Figura 23. Programación de la plantilla de visualización.
Figura 24. Inicialización de las rutinas.
Figura 25. Frecuencia de trabajo.
Figura 26. Módulo de pre- tarea rápida.
Figura 27. Módulo del estado de inicio.
Figura 28. Módulo del estado de muestreo.
Figura 29. Módulo del estado de visualización.
Figura 30. Ventana de la interfaz gráfica con Labview.
Figura 31. Ventana de programación de Labview.

INTRODUCCIÓN
En este trabajo se encuentran las tareas desarrolladas desde febrero hasta
octubre de 2008, mostrando detalladamente cómo se llevaron a cabo. Además el
diseño de un tacómetro digital con comunicación por interfaz al computador, con
el fin de visualizar la velocidad en la pantalla del PC, de cada tipo de motor
eléctrico orientado al control de los mismos, más adelante por otros estudiantes.
Este trabajo de grado surge de la necesidad de culminar la construcción del
laboratorio de máquinas eléctricas que aunque ya estaba en funcionamiento;
algunos de sus componentes debían ser reconstruidos ó reparados, además de
diseñar e implementar una herramienta que permitiera medir la velocidad de cada
motor, para así conocer el comportamiento de estas máquinas eléctricas.
Al ver esta necesidad, se formó un grupo de trabajo bajo la dirección del Asesor:
Ingeniero Alfonso Duque Jaramillo, el Ingeniero Baldomero Méndez por parte de la
Facultad de Ingeniería y el Ingeniero Heraldo Moya Martínez por parte de la
unidad de laboratorios de física y electrónica; los cuales brindaron total apoyo por
parte de la universidad para terminar la construcción del laboratorio. Gracias esta
gestión fueron asignados dos estudiantes en práctica empresarial, del programa
de Ingeniería Electrónica, para ayudar en el proyecto en el primer semestre de
2008.
1 PLANTEAMIENTO DEL PROBLEMA.
Como parte de los programas de Ingeniería Mecatrónica e Ingeniería Electrónica
de la Universidad de San Buenaventura, es de gran importancia la asignatura de
máquinas y motores eléctricos, porque proporciona al estudiante bases y
conocimientos importantes para su vida profesional. Estos conocimientos teóricos
aprendidos en clase deben complementarse experimentalmente por el estudiante
para que pueda hacer un paralelo entre lo teórico y la práctica. Allí los alumnos
tienen la posibilidad de experimentar en las áreas de máquinas eléctricas y en la
electrónica de potencia.
El proyecto de laboratorio de máquinas eléctricas, coordinado por el ingeniero
Alfonso Duque y por el ingeniero Heraldo Moya pretende dar continuidad a los
estudios de ingeniería.
Se plantea el desarrollo de una interfaz de control para que la medición de los
componentes en el laboratorio sean las adecuadas para que el alumno realice las
prácticas correspondientes.
A continuación se detallan los componentes que debe tener el laboratorio de
máquinas eléctricas al terminar al 100% su construcción.

El laboratorio consta de 6 módulos, cada uno equipado con:
• Módulo de potencia
o Fuente trifásica fija 208v
o Fuente trifásica variable 0 a 208v
o Fuente monofásica fija de 120v
o Fuente monofásica variable de 0 a 120v
o Salida DC variable de 0 a 277v
o Salida DC variable de 0 a 120v
o Guarda motor
o Interruptor de parada de emergencia
o Interruptor de arranque
o Interruptor Parada
o Interruptor de llave adicional
• Módulos de carga trifásica
o 2 Módulos de Carga resistiva.
o 2 Módulos de Carga inductiva
o 2 Módulos de Carga capacitiva
• Motor de corriente continua
• Motor trifásico de dos velocidades
• Motor monofásico con condensador de arranque
• Tres transformadores
• Riel de montaje y acople para los motores
• Alternador
• Vatímetro
• 3 Multímetros
• Tacómetro.
(Uno en cada motor del banco, con su respectiva interfaz al PC)

1.1 JUSTIFICACIÓN.
El proyecto no fue finalizado por falta de tiempo y por cierre de presupuesto por
parte de la Universidad.
Se vio la necesidad de terminar el laboratorio en un 100% y complementarlo
implementando la interfaz de control por medio de un computador para visualizar
los comportamientos de los motores, en un tacómetro.
Todo esto se conecta de una forma práctica para el laboratorio por medio de porta
bananas, para que el tiempo de la práctica se aproveche al máximo.
Al hacer un análisis detallado de las partes del laboratorio y para su total
funcionamiento, se vio la necesidad de terminar de construirlos, verificar su
montaje, revisar si había algún componente debía ser rediseñado, construido o
reparado. Todo esto para el correcto funcionamiento de los módulos y de la interfaz
con el computador.
Con base en estos análisis se planteó un objetivo general y varios específicos;

1.2 OBJETIVOS DEL PROYECTO.
1.2.1 OBJETIVO GENERAL:
Finalizar la construcción del laboratorio de máquinas y motores eléctricos de la
Universidad de San Buenaventura Bogotá D.C.
1.2.2 OBJETIVOS ESPECÍFICOS:
- Reconstruir módulos trifásicos de carga resistiva, carga capacitiva, carga
inductiva.
- Construcción de cargas resistivas para 12 y 120 voltios.
- Identificar los valores respectivos de las cargas resistivas para potencias de
100, 60 y 20 vatios.
- Puesta en marcha de las cargas capacitivas de 2.2 µF, 22 µF.
- Alinear los diferentes tipos de motores para su montaje en laboratorio.
- Revisar el cableado de los módulos de potencia y su funcionamiento.
- Adecuar motores para que tengan un tipo de conexión para laboratorio.
- Implementar una adquisición de datos con miras a un control posterior que
sirva como primer escalón en el desarrollo y construcción de un sistema de
control implementando un tacómetro.
- Señalización de todos los componentes del laboratorio.

2 DESARROLLO DE ACTIVIDADES.
El grupo de trabajo anteriormente mencionado empezó actividades en las
primeras semanas de marzo del 2008.
Las primeras actividades se enfocaron en saber los materiales con lo que se
contaban, cuáles servían y cuáles no, además de hacer un inventario.
Con el asesor del proyecto: Ing. Alfonso Duque se fijaron tareas y labores a
realizar; empezando con el desarme de las cargas resistivas que estaban en el
laboratorio.
Al desarmarlas y probarlas se llegó a la conclusión de que se debían volver a
construir con materiales nuevos; enseguida se compraron 2 metros cuadrados de
baldosa de 30 x 30 centímetros, las cuales debían servir para aislar los hilos de la
resistencia y soportar las altas temperaturas que se podían presentar en cada una
de estas resistencias.
Para este fin se compró resistencia de 256Ω por metro, y se realizó el siguiente
cálculo:
Se buscaba tener resistencias que disiparan 100, 60 y 20 vatios respectivamente y
estas debían ser montadas en una placa de cerámica cortada especialmente con
las medidas de los bancos de carga que ya estaban construidos.

Si se tiene en cuenta que la resistencia comercial que se debía comprar era de
256Ω por metro.
Cuántos metros se debían comprar si experimentalmente se llegó a la conclusión
de que las resistencias debían de ser así:
La resistencia que debía disipar 100 vatios a 120 voltios, debía tener cuatro hilos.
La resistencia que debía disipar 60 vatios a 120 voltios, debía tener 3 hilos.
La resistencia que debía disipar 20 vatios a 120 voltios, debía tener 2 hilos.
Se compraron en total más de 400 metros de resistencia que fue suficiente para
esta construcción.
Estas resistencias se construyeron y se probaron. Enseguida se volvieron a
instalar en las cajas, donde van las cargas resistivas, para su funcionamiento en el
laboratorio.
Al tiempo se desmontaron las platinas, en las cuales se fijan los motores a los
rieles; es decir, cada motor tiene un sistema de platinas con el cual se fija y se
atornilla al riel del módulo.
Estas platinas, están hechas de perfiles de acero normalizado, calibradas en 1/4
de pulgada de espesor, por 2 pulgadas de ancho.
Cada platina al ser desmontada, fue llevada a un taller de cromado en donde se
procedió a hacerle tratamiento a dichas platinas, con el fin de protegerlas del óxido
y darles un acabado más fino, lo que beneficia la estética del laboratorio.
Una vez fueron entregadas las platinas al proyecto, se volvieron a montar en los
motores y se ajustaron con tornillos a cada uno.
Enseguida se notó un problema en la forma en cómo se fijaban en un comienzo
los motores a los rieles del módulo, se llegó a la conclusión que lo mejor era volver
a construir estos topes, de forma que el motor quedara más ajustado y que la
forma de extracción del riel fuera más segura.
Cuando se revisaron los módulos de potencia de cada banco, se pudo evidenciar
que al ser este un laboratorio con fines educativos, la protección contra cortos
circuitos, que los fusibles de cada módulo brindaban; no estaban en una posición
de fácil acceso, porque en el caso de un corto circuito, y se tuviera que cambiar un
fusible, se debía desarmar por completo la carcasa del módulo de potencia; por lo
cual se optó por ubicar cuatro porta fusibles en la parte posterior de cada módulo.
Al tiempo que se desarrollaban muchas de estas labores se iba elaborando
también el diseño de un tacómetro el cual se desglosará más adelante.
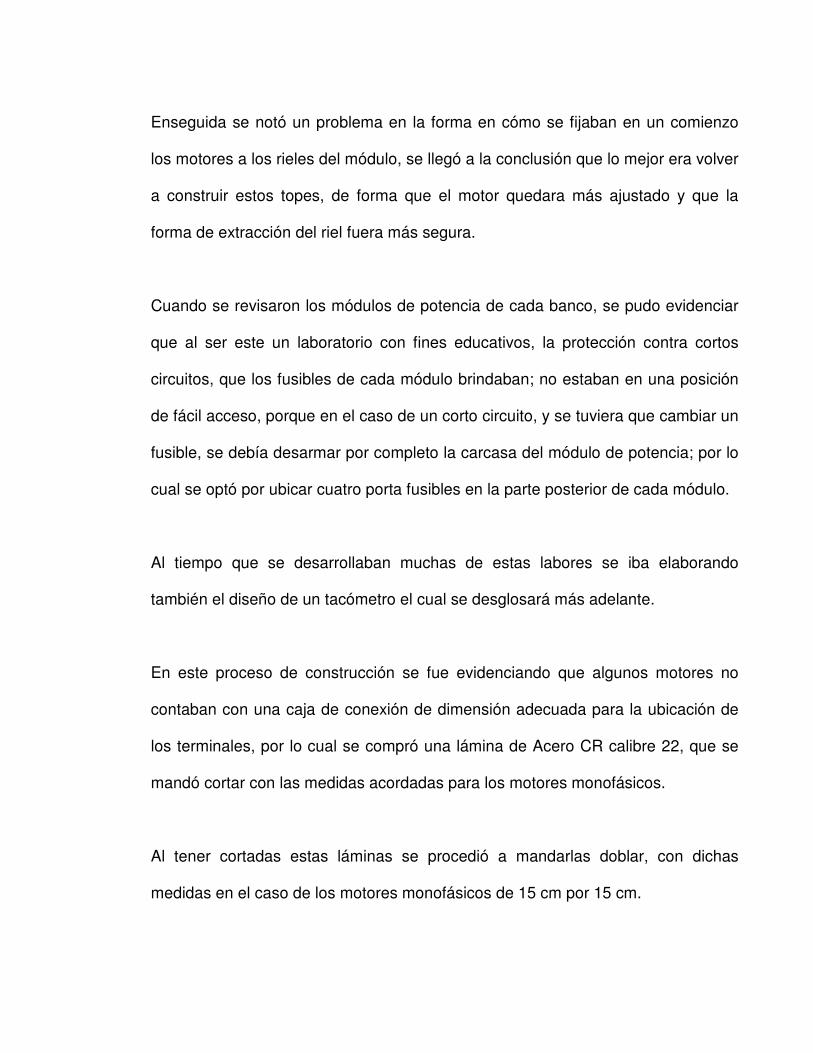
En este proceso de construcción se fue evidenciando que algunos motores no
contaban con una caja de conexión de dimensión adecuada para la ubicación de
los terminales, por lo cual se compró una lámina de Acero CR calibre 22, que se
mandó cortar con las medidas acordadas para los motores monofásicos.
Al tener cortadas estas láminas se procedió a mandarlas doblar, con dichas
medidas en el caso de los motores monofásicos de 15 cm por 15 cm.
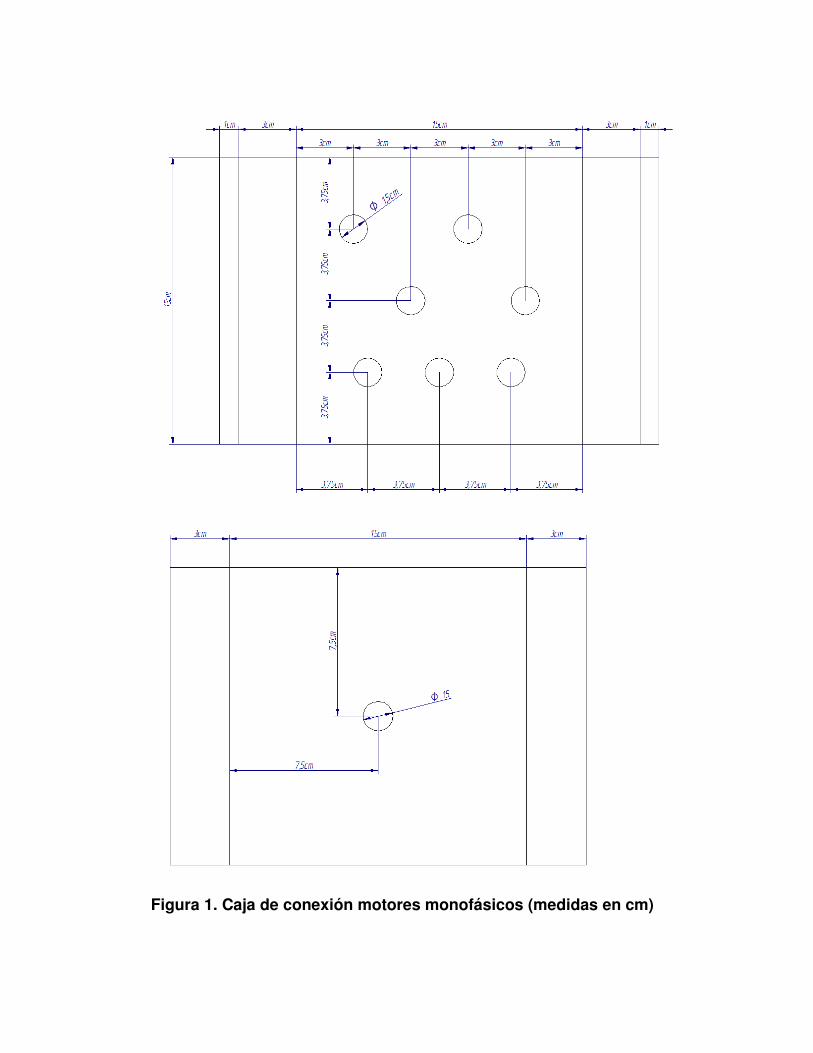
Figura 1. Caja de conexión motores monofásicos (medidas en cm)
En un taller de pintura electrostática, estas cajas se mandaron pintar con los
colores característicos de la Universidad de San Buenaventura (naranja y negro),
no sin antes abrir las perforaciones en las cuales se ubicarían los porta- bananas,
con el siguiente esquema:
Figura 2. Esquema de conexión motor monofásico
Enseguida se ubicaron dichos porta- bananas y se comenzó con la verificación y
conexión de cada uno de los motores; tanto monofásicos, trifásicos y dc.
En este proceso de verificación se evidenció que se debían desbaratar todas las
cajas de conexión de laboratorio, de todos los motores y volver a hacer todo el
montaje (en el caso de las que ya existían).
Se tuvo especial cuidado ya que de estos montajes depende, la vida útil de los
motores y de su correcto funcionamiento en el laboratorio.
En estas labores culminó el primer semestre del 2008 y en vacaciones se optó por
hacer la señalización de todos los componentes del laboratorio.
Los archivos de dicha señalización están adjuntos al presente documento, y en
fotografías se pueden ver los resultados obtenidos.
Esta señalización, en primera instancia, se quiso hacer con etiquetas en vinilo,
con letras grabadas y pintadas, pero por cuestión de costos y haciendo un estudio
concienzudo se llegó a la conclusión de que lo más seguro al hacer unas etiquetas
tan costosas y tan llamativas, es que algunas personas se las llevarían como
recuerdo.
Por esto en reunión se tomo la decisión de hacer etiquetas en acetato, pegadas
con papel contact, que serian muy prácticas, en colores algunas veces y muy
fáciles de reemplazar.
Así comenzó el segundo semestre del 2008, con un laboratorio físicamente ya en
marcha pero con muchas pequeñas tareas que debían de ser realizadas.
Este primer semestre comenzó con la compra de los materiales indispensables
para la construcción del tacómetro y su interfaz al computador.
Como primera tarea ya teniendo el diseño del tacómetro que se había realizado
anteriormente, se hicieron bocetos en el programa Eagle, para hacer la
elaboración de los circuitos impresos.

Con la elaboración de estos circuito se presentaron algunos problemas; ya que la
empresa encargada de elaborar estas baquelas presentó falta de calidad y pobres
acabados, entonces se tomó la decisión de que lo mejor era volver a hacer estos
circuitos en otra empresa de mayor reconocimiento, aunque esto acarreara
mayores costos.
Al hacer el diseño del tacómetro fue evidente que lo mejor era poner un tacómetro
en cada motor, que aunque fuera a un costo mayor, a largo plazo como no se
tendrían que estar pasando tacómetros de un motor a otro, esto alargaría
ampliamente la vida de los circuitos, al minimizar la manipulación de los mismos.
Por esto cada banco del laboratorio de máquinas eléctricas cuenta con tres
tacómetros; uno en cada motor del banco.
Al hacer la compra de los componentes de los tacómetros se contempló la
posibilidad de dejar tres circuitos aparte para los diferentes trabajos que se
puedan utilizar, por esto el laboratorio en total cuenta con 21 circuitos a la
disposición de los estudiantes que los necesiten.
Estos tacómetros en un principio serian entregados a la vista del estudiante, pero
en decisión tomada en reunión con el asesor y la unidad de laboratorios, fue
necesario hacer unas cajas en plástico que protegieran los tacómetros contra
robos de las LCD´s y de los Microcontroladores, lo cual haría más dispendiosa la
labor de mantenimiento del laboratorio.

Estas decisiones aunque muy acertadas, atrasaron un poco la culminación del
proyecto, ya que implicaban más tiempo y dinero que algunas veces fue difícil de
conseguir.
Las cajas de plástico se hicieron con forma de semicírculo, del mismo diámetro de
los motores más grandes del laboratorio, de color negro y con un visor
transparente para las LCD´s.
La fijación de estas cajas plásticas fue estudiada y probada, de diferentes
maneras para saber cuál era la mejor y con la aprobación de la unidad de
laboratorios después de muchas pruebas, fue fijar las cajas con tornillo pasante a
través del circuito, con tuerca fijada con traba roscas de fuerza alta.
Para la alimentación de los tacómetros se compraron adaptadores universales, los
cuales, después de estudiarlos y revisarlos con ayuda de un osciloscopio, se llegó
a la conclusión de que lo mejor era cambiarlos por unos fijos de 5 Voltios a
1Amperio; suficiente para alimentar el circuito del tacómetro. Además de ser de
mejor calidad, aunque un poco costosos, serían los mejores para la vida de los
circuitos y sus componentes.
La última tarea que se hizo para culminar la construcción del laboratorio, fue la
prueba de los tacómetros, hasta lograr que cada motor funcionara con su
respectivo circuito y todo lo que esto conlleva:
Compra y cambio de componentes electrónicos, como cristales diodos, entre
otros. Además de la programación del microcontrolador que tuvo algunos
problemas.
Al final se culminó el proyecto, con la ayuda de nuestro asesor, y todas las
personas que estuvieron siempre para ayudarnos.
3 DISEÑO DEL TACÓMETRO.
Tacómetro del griego tachos (velocidad) y metros (medida), es utilizado para medir
la velocidad de un objeto en este caso un eje rotatorio en revoluciones por minuto.
Se busca tener un circuito eléctrico que de forma digital pueda hacer una
transducción de esta velocidad y visualizar dicha medida.
Al tener un motor al cual medirle la velocidad en su eje, salen a relucir varias
preguntas:
¿De qué forma medir esta velocidad sin afectar el funcionamiento del motor?
¿Cómo lograr acoplar un transductor electrónico al eje, para tomar dicha medida?
Se revisaron varias metodologías y teniendo en cuenta los costos. Se tomó la
siguiente decisión:
Si se utilizaba algún tipo de sensor, de fabricación especial, los costos serían muy
elevados, así que no se tuvo en cuenta ninguna otra posibilidad, además de la
facilidad para trabajar con algunos componentes electrónicos de bajo costo y de
buen funcionamiento, la mejor alternativa que se tenía era trabajar con diodos
emisores y receptores utilizando una barrera para la toma de esta medida.
La opción de tomar un diodo emisor-receptor único con un medio reflejante, no se
tuvo en cuenta ya que con cualquier movimiento involuntario de la mano que toma
la medición, esta se vería afectada.

Se decidió que este método no es el más apropiado para ser utilizado en el
laboratorio de máquinas eléctricas, porque el diseño del tacómetro debe de
minimizar los efectos externos que puedan afectar la toma de la medición de la
velocidad.
Sabiendo que se utilizaría un método de barrera para medir la velocidad de este
eje, se contempló, poner como algún un tipo de hélice, para que cuando pasara
por frente del haz de luz del diodo emisor, se interrumpiera la luz en el diodo
receptor y éste gracias a su comportamiento eléctrico no condujera ningún voltaje
que marcará un pulso en el microcontrolador.
Por efectos de mantenimiento, esta posibilidad no se tuvo en cuenta ya que al
haber un material, con alguna dureza y algo llamativo podrían robarlo, o también
ocurrir algún accidente si un estudiante acercara sus dedos para tocarlo.
Por estas razones se pensó en perforar el eje del motor, sin antes contemplar las
consecuencias de esto, como: esfuerzos adicionales en los cojinetes del los
motores, pero al consultar con algunos profesores más especializados en estos
temas, se concluye que esta perforación no sería tan problemática ya que estos
motores al ser industriales, pueden soportar grandes cargas y esfuerzos.
Se tomó la decisión de perforar el eje de cada motor, de lado a lado, lo más
centrado posible. Para que el haz de luz de dichos diodos pasara a través de este.
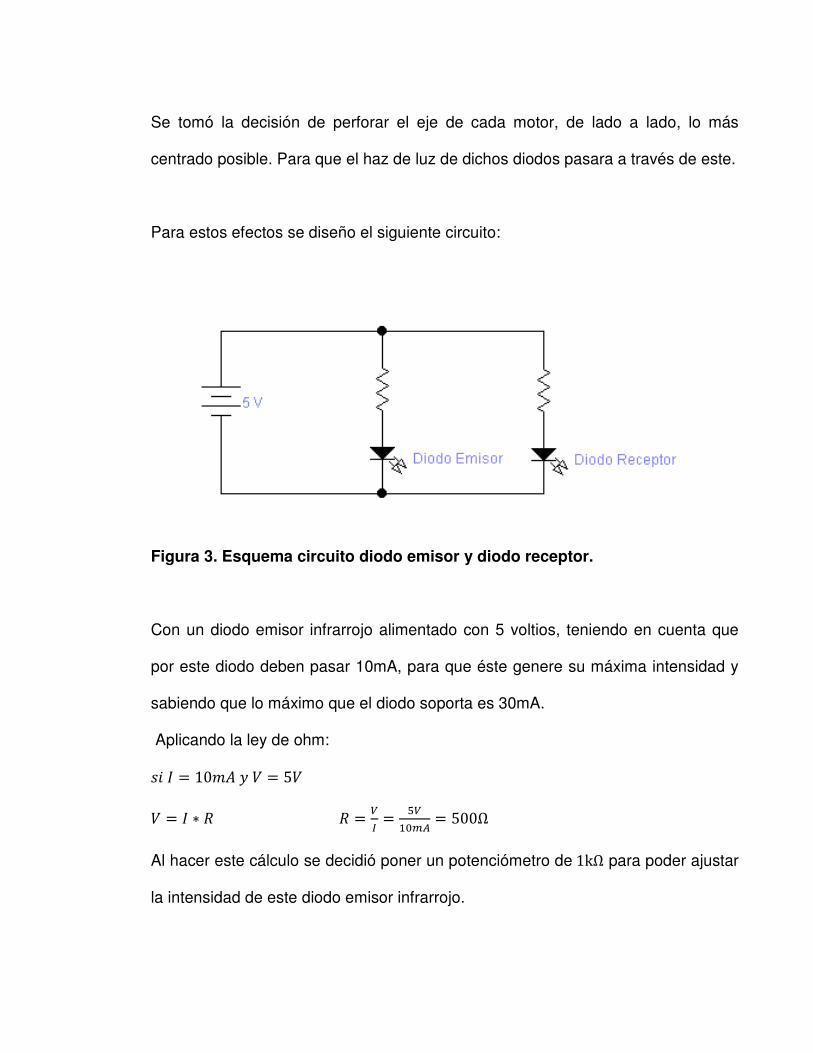
Para estos efectos se diseño el siguiente circuito:
Figura 3. Esquema circuito diodo emisor y diodo receptor.
Con un diodo emisor infrarrojo alimentado con 5 voltios, teniendo en cuenta que
por este diodo deben pasar 10mA, para que éste genere su máxima intensidad y
sabiendo que lo máximo que el diodo soporta es 30mA.
Aplicando la ley de ohm:
= 10 = 5
= ∗ =
=
= 500Ω
Al hacer este cálculo se decidió poner un potenciómetro de 1kΩ para poder ajustar
la intensidad de este diodo emisor infrarrojo.
Con un diodo infrarrojo receptor alimentado con 5 voltios, se tuvo en cuenta que al
recibir un estímulo luminoso por parte del diodo emisor, éste debe de conducir
corriente y comportarse como un corto circuito, dejando pasar por él los 5 voltios
de la alimentación.
Así que se optó por poner un potenciómetro mucho más grande, para el diseño se
utilizó uno de 50kΩ, para que el diodo se excite con una corriente muy pequeña,
por el orden de 0.1mA, para calibrar la sensibilidad del receptor infrarrojo.
Sabemos que este detector, funcionará cada vez que no detecte luz el diodo
receptor; así que se decidió utilizar un disparador Smith Trigger que funciona
como una compuerta NAND para que cuando no detecte luz en el receptor, se
produzca un disparo de 5 voltios a la entrada del microcontrolador.
Es decir, este disparador Smith Trigger genera una salida a nivel bajo cuando sus
dos entradas están a nivel alto y genera un nivel alto cuando cualquiera de sus
entradas están en un nivel bajo.
La salida de este circuito de disparo va a la entrada digital B0 del
microcontrolador.
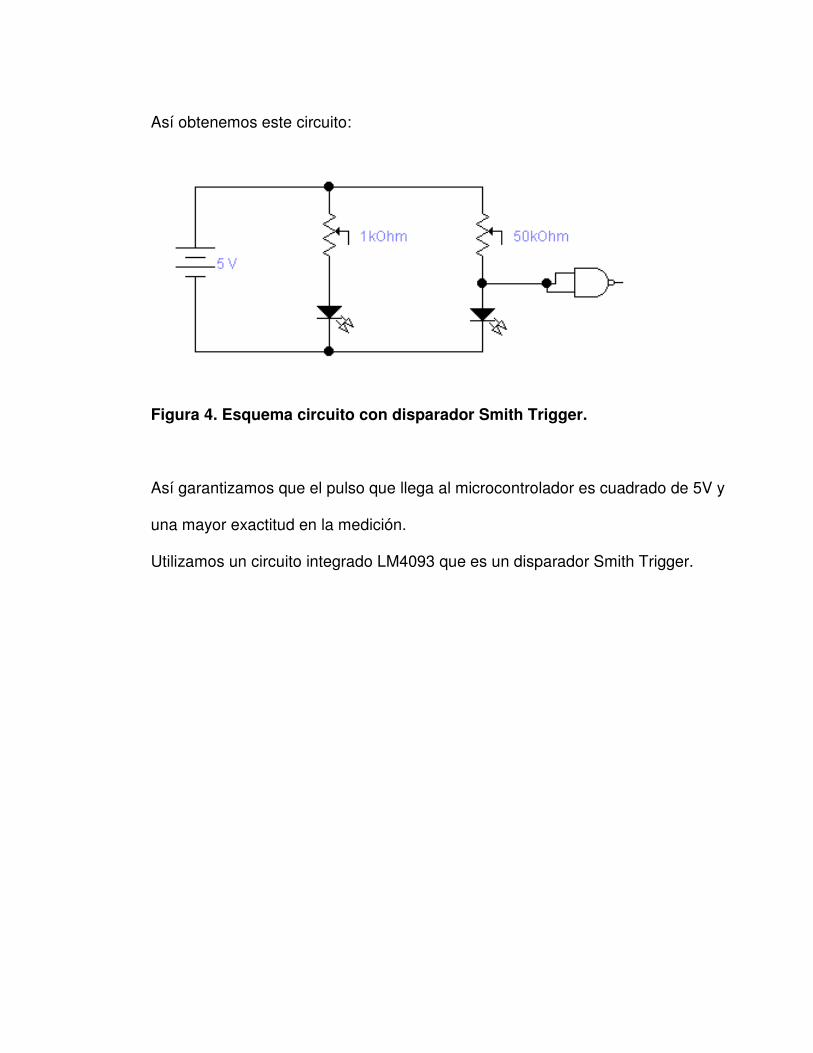
Así obtenemos este circuito:
Figura 4. Esquema circuito con disparador Smith Trigger.
Así garantizamos que el pulso que llega al microcontrolador es cuadrado de 5V y
una mayor exactitud en la medición.
Utilizamos un circuito integrado LM4093 que es un disparador Smith Trigger.

2.1 EL MICROCONTROLADOR.
Para esta clase de circuitos se trata de utilizar un microcontrolador rápido, que sea
confiable, que soporte el ruido; por esto se tuvo en cuenta en primer lugar el
microcontrolador de la serie HC908 de Motorola.
El microcontrolador de Motorola MC68HC908GP321
Este microcontrolador pertenece a la familia HC08 de Motorola, cuyas principales
características son:
Modelo de programación HC05 mejorado.
Control de bucles optimizado
16 modos de direccionamiento
Registro de índice y puntero de pila de 16-bits
Transferencia de datos de memoria a memoria.
Rápidas instrucciones de multiplicación de 8x8
Rápidas instrucciones de división de 16/8
Instrucciones BCD (Binario codificado en decimal)
Optimización para aplicaciones de control
Soporte eficiente del lenguaje C
1 Fuente: http://arantxa.ii.uam.es/~gdrivera/robotica/hc08/hc908gp32.htm
Las características principales del microcontrolador MC68HC908GP32 son:
Arquitectura de alto rendimiento M68HC08 optimizada para compiladores C
Compatible con la familia 68HC05
Frecuencia interna del bus de 8-MHz
Código de seguridad para la lectura y programación de la memoria FLASH
Firmware On-chip para la programación desde PC Programable en el circuito
Sistemas de protección:
"Watch Dog" opcional ( Computer Operating Properly (COP) reset)
Detección de baja tensión con reset opcional
Detección de código ilegal con reset
Detección de direccionamiento ilegal con reset
Diseño de bajo consumo, completamente estático y varios modos de operación
32 Kbytes de memoria FLASH programable en circuito
512 bytes de memoria RAM
Módulo de interfaz serie asíncrono (SPI)
Módulo de interfaz serie síncrono (SCI)
Dos temporizadores de 2 canales de 16 bits (TIM1 y TIM2) con captura de entrada
seleccionable, comparadores y capacidad de PWM en cada canal
8 canales para conversión AD por aproximaciones sucesivas de 8 bits
Módulo generador de reloj con PLL "on-chip"C
Hasta 33 pines de entradas/salidas de propósito general
Pullups seleccionables en los puertos A, C, y D. La selección puede ser de forma
individual, por bit.

Corriente de entrada / salida de hasta 10mA en todos los puertos
Puerto de 8-bits para manejo de teclado
Encapsulado plástico de 40 pines DIP, 42 pines SDIP o 44 pines QFP (quad flat
pack)2
Lo que en verdad fue un factor decisivo en la escogencia de este
microcontrolador, fue la orientación que fue impartida en clase:
En clase de Microcontroladores, se da especial énfasis en trabajar la herramienta
de Microgrades, que solo trabaja con Microcontroladores Motorola y en especial
con esta familia.
Además siempre se habló de la fiabilidad de estos componentes, su resistencia al
ruido, su excelente comportamiento en su módulo de PWM el cual era importante
tener en cuenta; ya que la finalidad es que esta misma tarjeta sea utilizada para un
posterior control de los motores del laboratorio y pensando en la facilidad de
programación, en el entorno gráfico que ofrece la herramienta de microgrades, al
final se tomo la decisión de trabajar con este microcontrolador.
Al trabajar con microgrades se tiene una configuración especial; hay que poner
una resistencia de 1kΩ en el pin de A0 en el microcontrolador, y trabajar con un
oscilador de 16Mhz.
2 Fuente: http://arantxa.ii.uam.es/~gdrivera/robotica/hc08/hc908gp32.htm
2.1.1 LA ALIMENTACIÓN DE MICROCONTROLADOR.
El microcontrolador MC68HC908GP32 por lo general se polariza con una fuente
DC de 5 voltios, de al menos 1 amperio, que son aplicados entre los pines: 1y 2
(VDDA Y VSSA) y entre los pines 19 y 20 (VSS Y VDD); siendo (VDDA y VDD), la
alimentación y (VSSA y VSS) la masa del chip.
2.1.2 EL OSCILADOR.
Este circuito le indica al microcontrolador la velocidad de trabajo, generando una
onda cuadrada de alta frecuencia, que se utiliza para sincronizar todas las
operaciones del sistema, es vital para la operación del microcontrolador ya que sin
él este simplemente no funciona.
En el microcontrolador MC68HC908GP32 los terminales del oscilador son el 4 y el
5 (OSC1 y OSC2) respectivamente y permite cinco tipos de osciladores para
definir la frecuencia de trabajo.
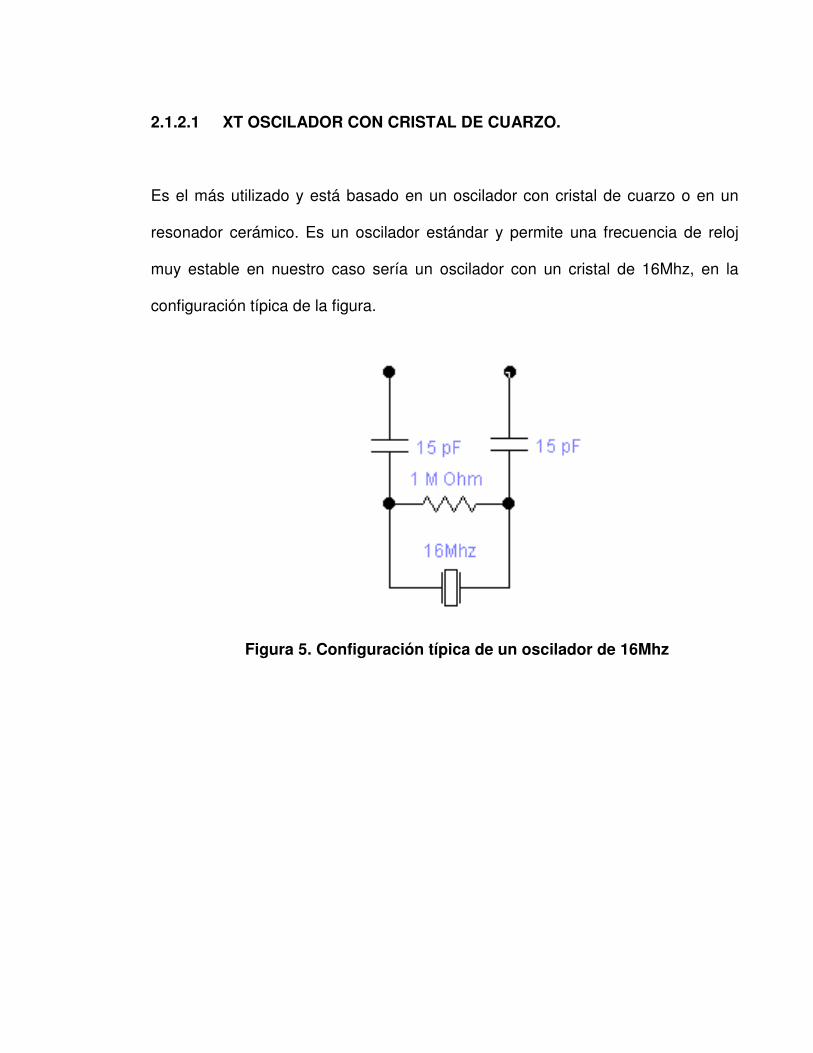
2.1.2.1 XT OSCILADOR CON CRISTAL DE CUARZO.
Es el más utilizado y está basado en un oscilador con cristal de cuarzo o en un
resonador cerámico. Es un oscilador estándar y permite una frecuencia de reloj
muy estable en nuestro caso sería un oscilador con un cristal de 16Mhz, en la
configuración típica de la figura.
Figura 5. Configuración típica de un oscilador de 16Mhz

2.1.2.2 RC OSCILADOR CON RESISTENCIA Y CONDENSADOR.
Este oscilador está formado por una resistencia y un condensador; es el oscilador
de más bajo costo, pero de muy baja precisión, es utilizado en procesos que no
necesitan exactitud de tiempo, por lo cual no es adecuado para la aplicación del
tacómetro.
Figura 6. Configuración típica de un oscilador RC.
2.1.2.3 OSCILADOR HS
Es un oscilador de cristal o resonador cerámico de alta velocidad (high speed
cristal / resonator), trabaja a altas frecuencias, su desventaja el costo y su
configuración típica es la misma que la del oscilador XT (ver Figura 4.).
2.1.2.4 OSCILADOR LP
Es un oscilador de cristal o resonador cerámico de baja potencia (low power
cristal), trabaja a altas frecuencias, su desventaja el costo y su configuración típica
es la misma que la del oscilador XT (ver Figura 4.)
2.1.2.5 OSCILADOR CON SEÑAL DE RELOJ EXTERNA
Este oscilador es utilizado cuando se necesita una señal exacta y se puede utilizar
un generador de señales por poner un ejemplo u otra señal de reloj externa.
Para nuestro caso no se tiene en cuenta por no ser utilizada en estas aplicaciones.
Para el diseño del tacómetro se escogió el oscilador XT con cristal de cuarzo en la
configuración típica del circuito de la figura, debido a su bajo costo y excelente
comportamiento en este tipo de aplicación.
2.1.3 EL RESET
El llamado reset en un microcontrolador es utilizado para reinicializar su
funcionamiento y así volver a comenzar desde cero sus rutinas, en donde las
variables del microcontrolador toman un valor conocido.
El terminal utilizado para el reset del microcontrolador MC68HC908GP32 es el
número 6 llamado RST y está negado; lo que quiere decir que el microcontrolador
se reinicializa con un nivel de voltaje bajo.
Por lo cual se pone un pulsador a la masa del circuito, el fabricante recomienda
poner una resistencia de 1kΩ desde el reset a la alimentación.
Con esto se logra que cada vez que se oprima el pulsador, el microcontrolador
volverá a su estado inicial.
2.1.4 LA LCD (DISPLAY DE CRISTAL LÍQUIDO)
La LCD (Liquid Crystal Display) o pantalla de cristal liquido es una pantalla
delgada y plana formada por un número de pixeles en color o monocromos
colocados delante de una fuente de luz o reflectora. A menudo se utiliza en
dispositivos electrónicos, ya que consume cantidades muy pequeñas de energía
eléctrica.
La configuración de una LCD de 2 filas por 16 caracteres suficiente para la
aplicación del tacómetro, con una velocidad de 9600 o 2400 baudios; por esto
esta LCD es la que se toma para el diseño del circuito. La LCD se conecta al
puerto A del microcontrolador el cual siempre se programa para este fin en
microgrades. Se debe tener en cuenta que hay que poner una resistencia de
contraste y la otra de iluminación como se muestra en la gráfica
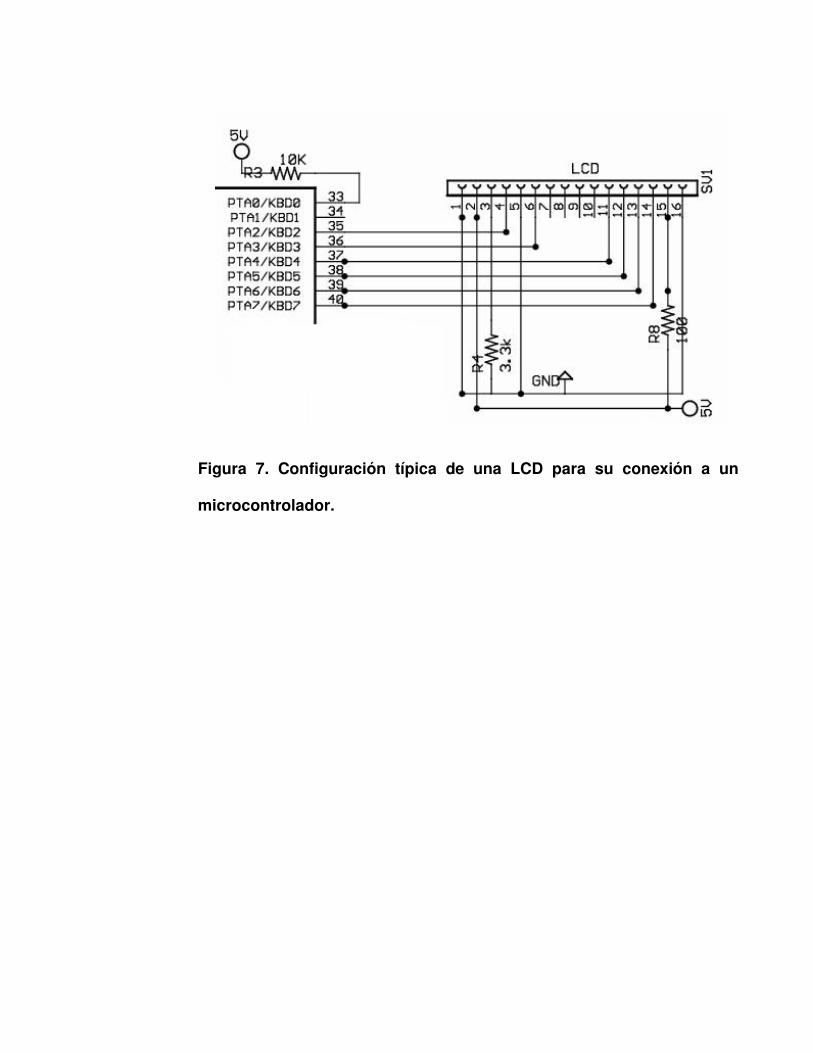
Figura 7. Configuración típica de una LCD para su conexión a un
microcontrolador.

2.1.5 LA INTERFAZ AL COMPUTADOR
Toda la información que es procesada en el microcontrolador puede ser enviada a
un computador por medio de sus pines de comunicación (RX y TX)
respectivamente,
El computador maneja niveles de voltaje de -8v a +8v que no puede ser conectada
al microcontrolador directamente.
Por lo cual se utiliza un circuito para convertir estos niveles TTL a niveles RS232
que son los del puerto serial que es por donde se comunican el microcontrolador
con el computador, por medio de un conector DB9 hembra.
Para esto existe un integrado que convierte estos niveles TTL a RS232 y
viceversa; para comunicar el circuito del microcontrolador con el computador hay
que implementar el siguiente circuito.
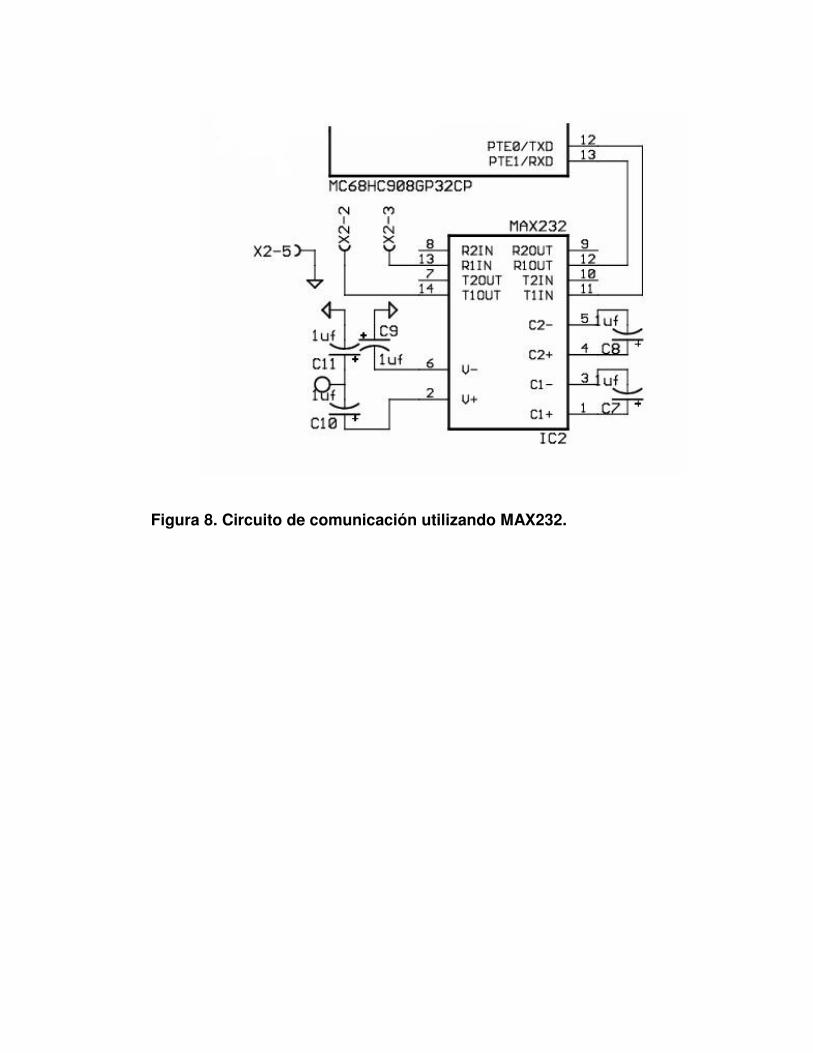
Figura 8. Circuito de comunicación utilizando MAX232.

2.2 CIRCUITO DEL DISEÑO COMPLETO
Así teniendo en cuenta todos los periféricos necesarios para el funcionamiento del
microcontrolador, de la visualización por medio de una LCD y del circuito de
disparo del tacómetro acoplado al eje del motor; podemos llegar a un diseño final
que se muestra a continuación:
Figura 9. Diseño electrónico final del circuito del tacómetro.
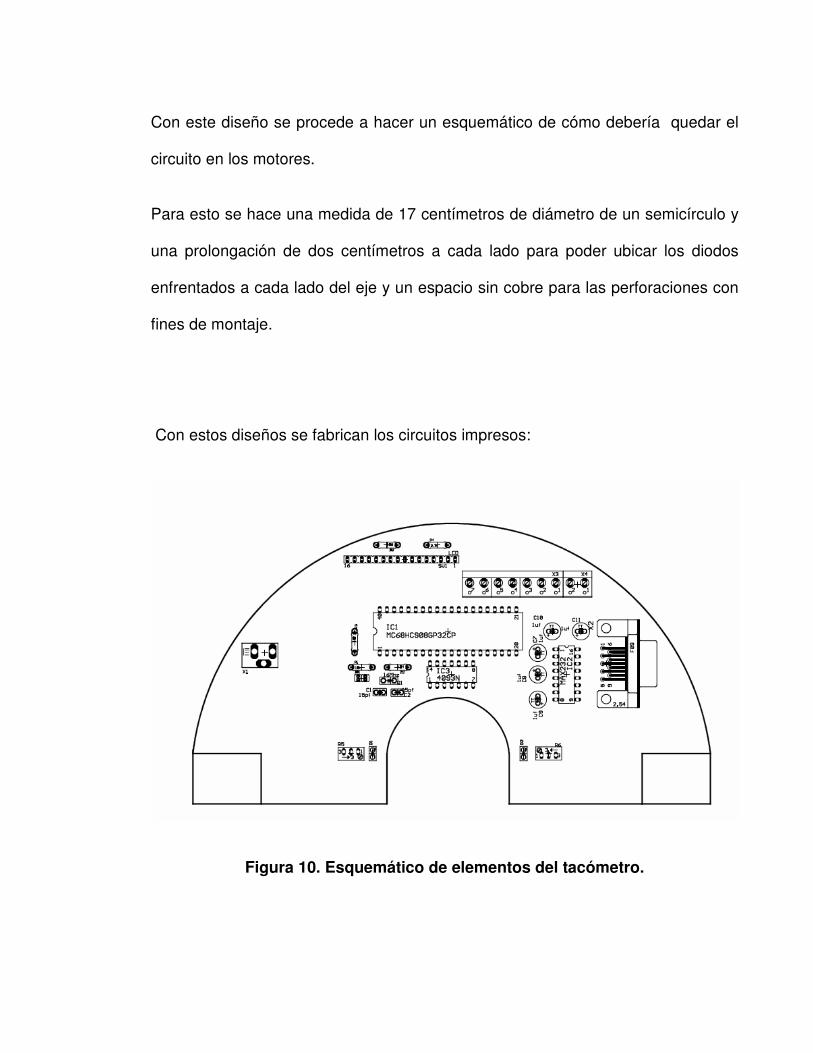
Con este diseño se procede a hacer un esquemático de cómo debería quedar el
circuito en los motores.
Para esto se hace una medida de 17 centímetros de diámetro de un semicírculo y
una prolongación de dos centímetros a cada lado para poder ubicar los diodos
enfrentados a cada lado del eje y un espacio sin cobre para las perforaciones con
fines de montaje.
Con estos diseños se fabrican los circuitos impresos:
Figura 10. Esquemático de elementos del tacómetro.

Figura 11. Máscara de pistas del tacómetro.
Figura 12. Máscara Antisolder del tacómetro.

3.4 PROGRAMACIÓN DEL MICROCONTROLADOR.
El programa del tacómetro se basa en el siguiente diagrama de flujo.
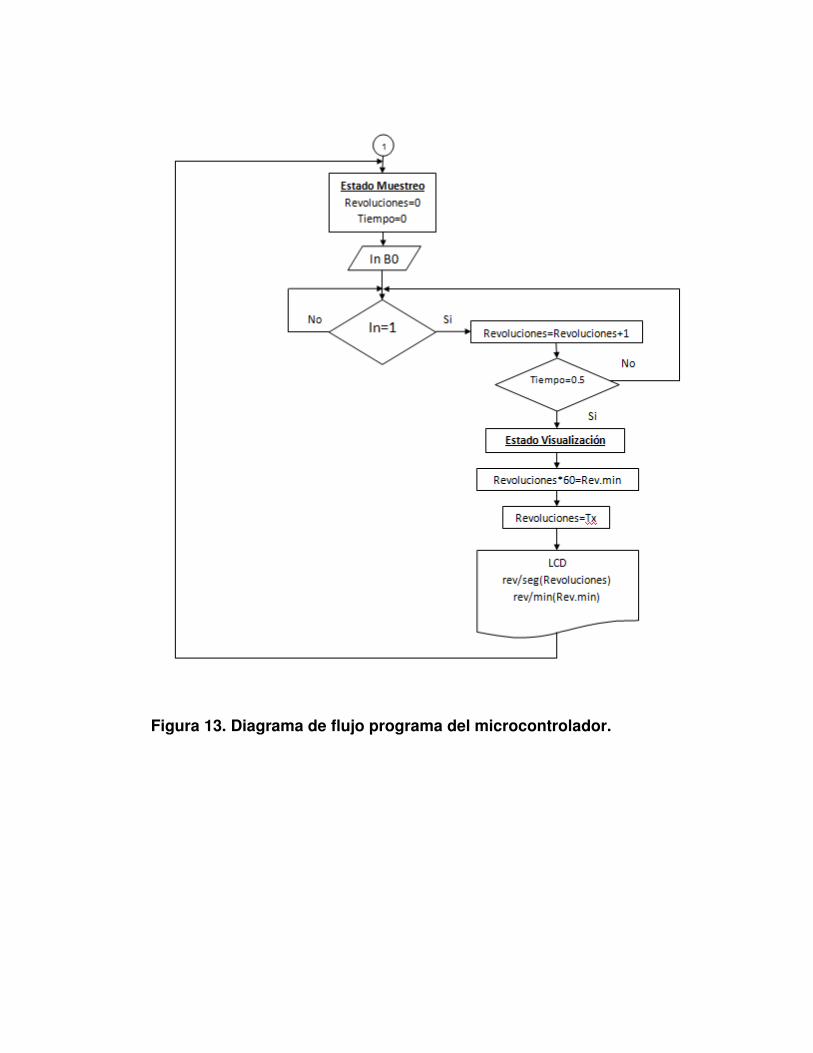
Figura 13. Diagrama de flujo programa del microcontrolador.
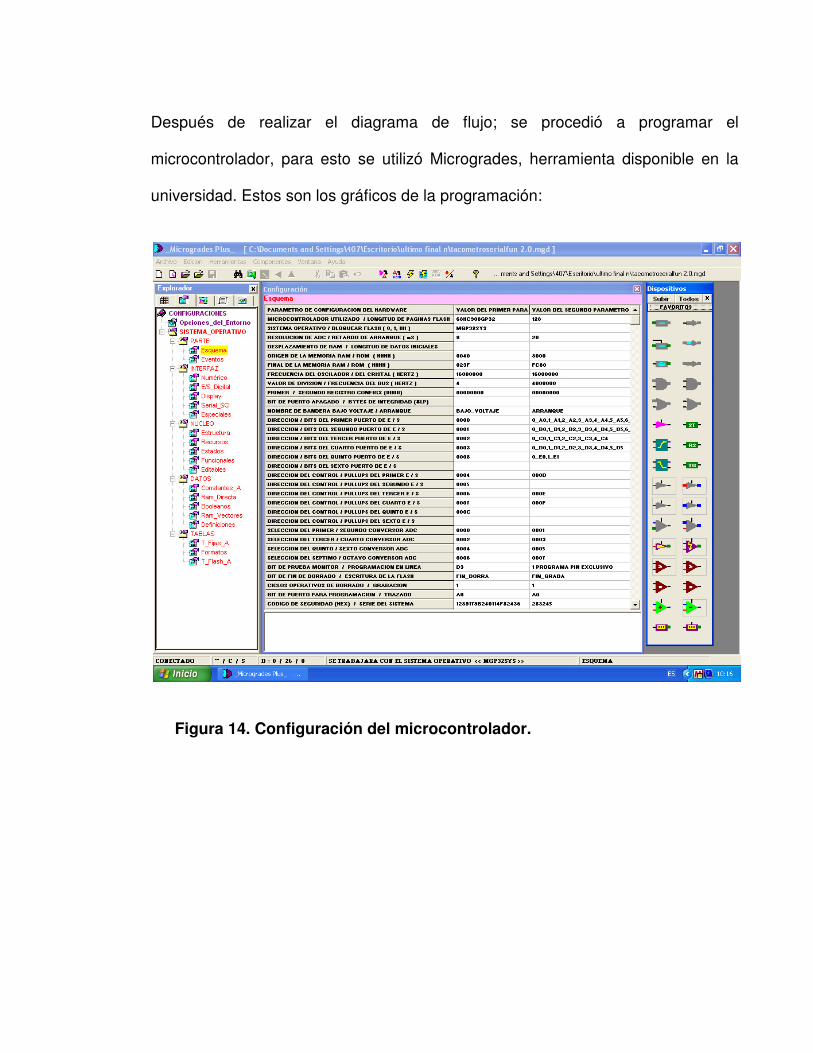
Después de realizar el diagrama de flujo; se procedió a programar el
microcontrolador, para esto se utilizó Microgrades, herramienta disponible en la
universidad. Estos son los gráficos de la programación:
Figura 14. Configuración del microcontrolador.
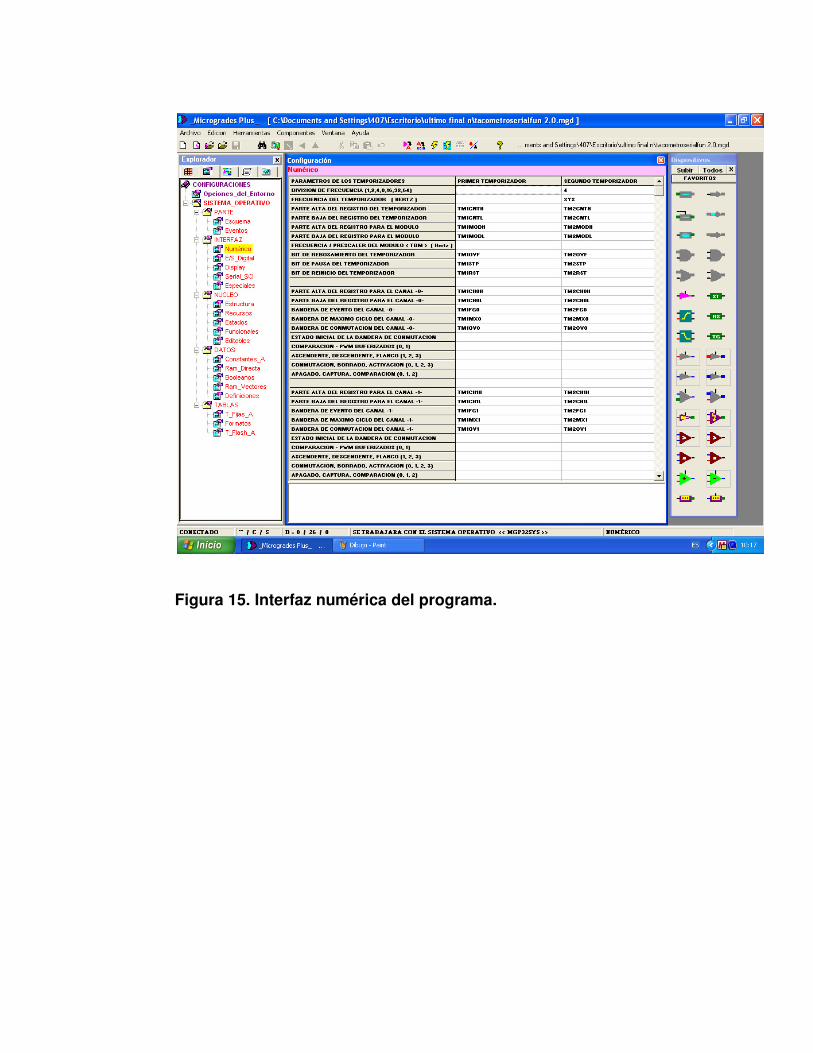
Figura 15. Interfaz numérica del programa.
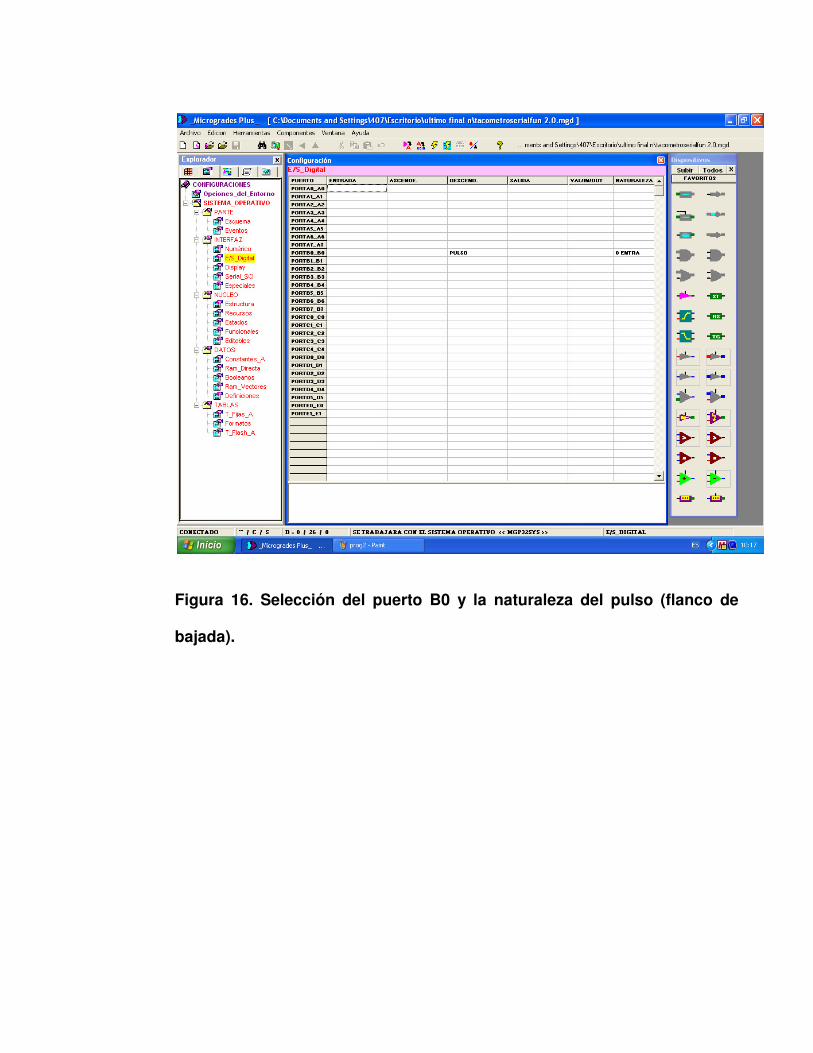
Figura 16. Selección del puerto B0 y la naturaleza del pulso (flanco de
bajada).

Figura 17. Configuración del display de 2x16.

Figura 18. Configuración serial SCI (9600bps, 8 bits, impar)
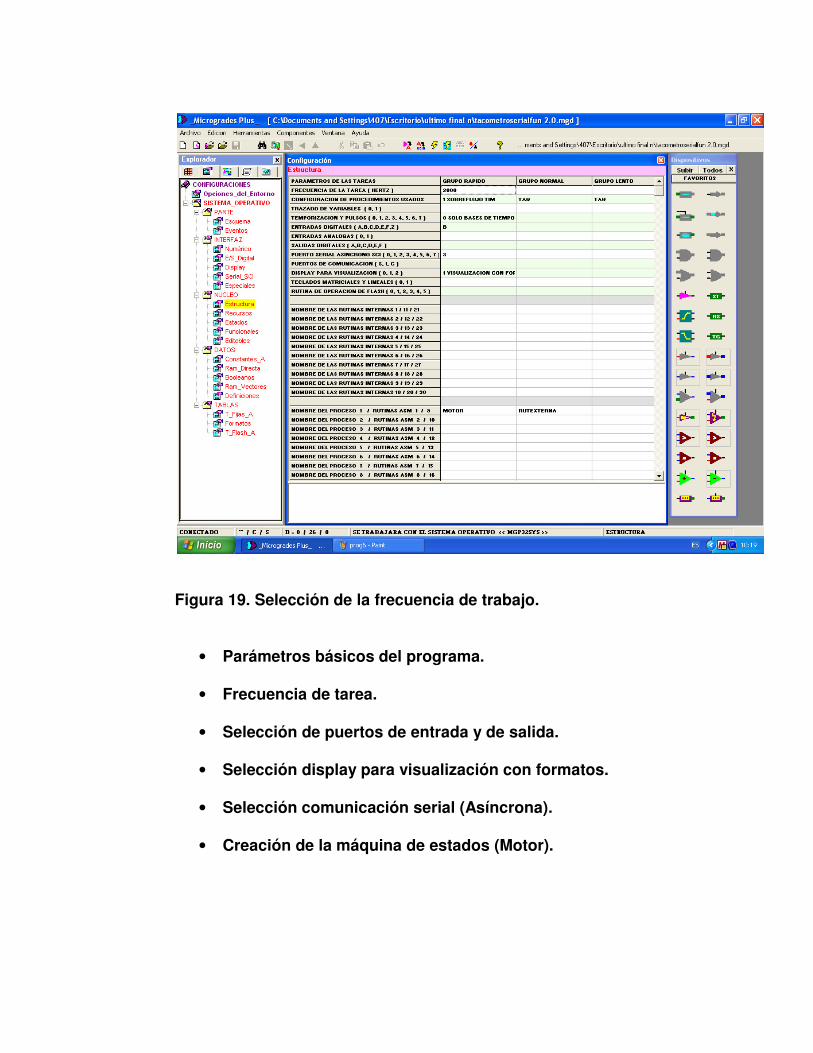
Figura 19. Selección de la frecuencia de trabajo.
• Parámetros básicos del programa.
• Frecuencia de tarea.
• Selección de puertos de entrada y de salida.
• Selección display para visualización con formatos.
• Selección comunicación serial (Asíncrona).
• Creación de la máquina de estados (Motor).

Figura 20. Ventana de programación de recursos.
• Ajuste de tiempo real en relojes (división de tiempo)
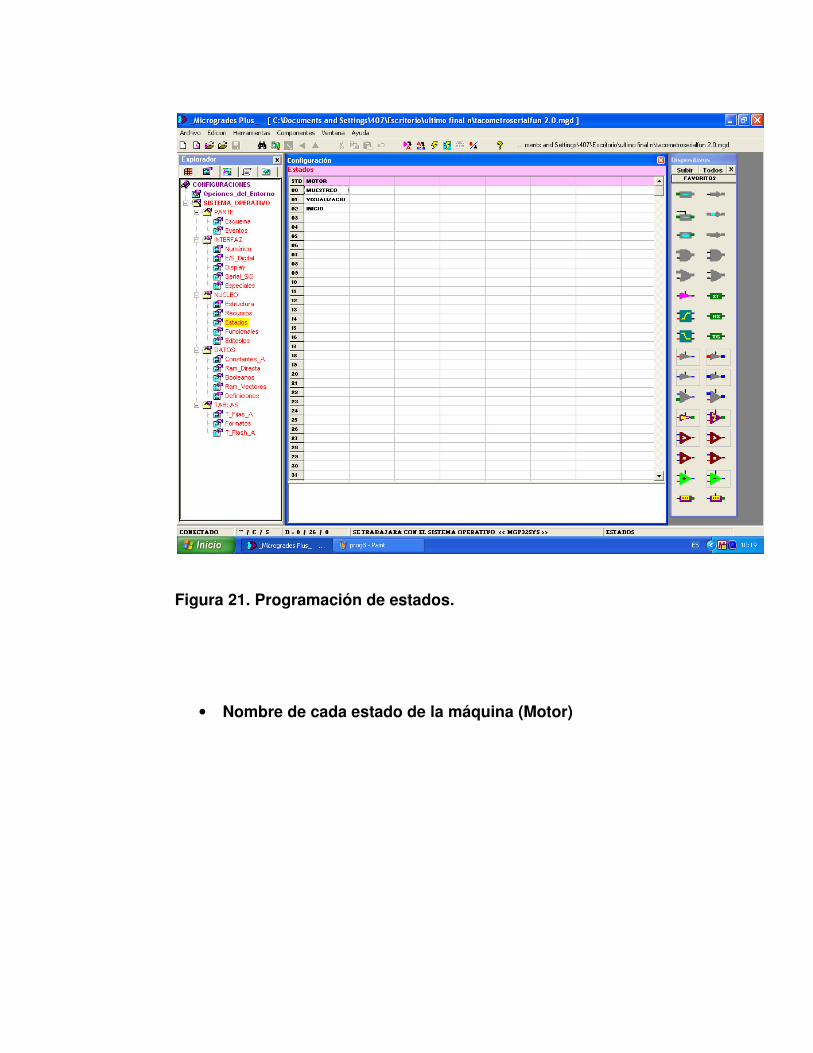
Figura 21. Programación de estados.
• Nombre de cada estado de la máquina (Motor)

Figura 22. Selección de variables.
• Revoluciones.
• Resultado.
• Resultado2.
• Tx.
• Rx (en el caso de que se necesite recibir datos del PC).
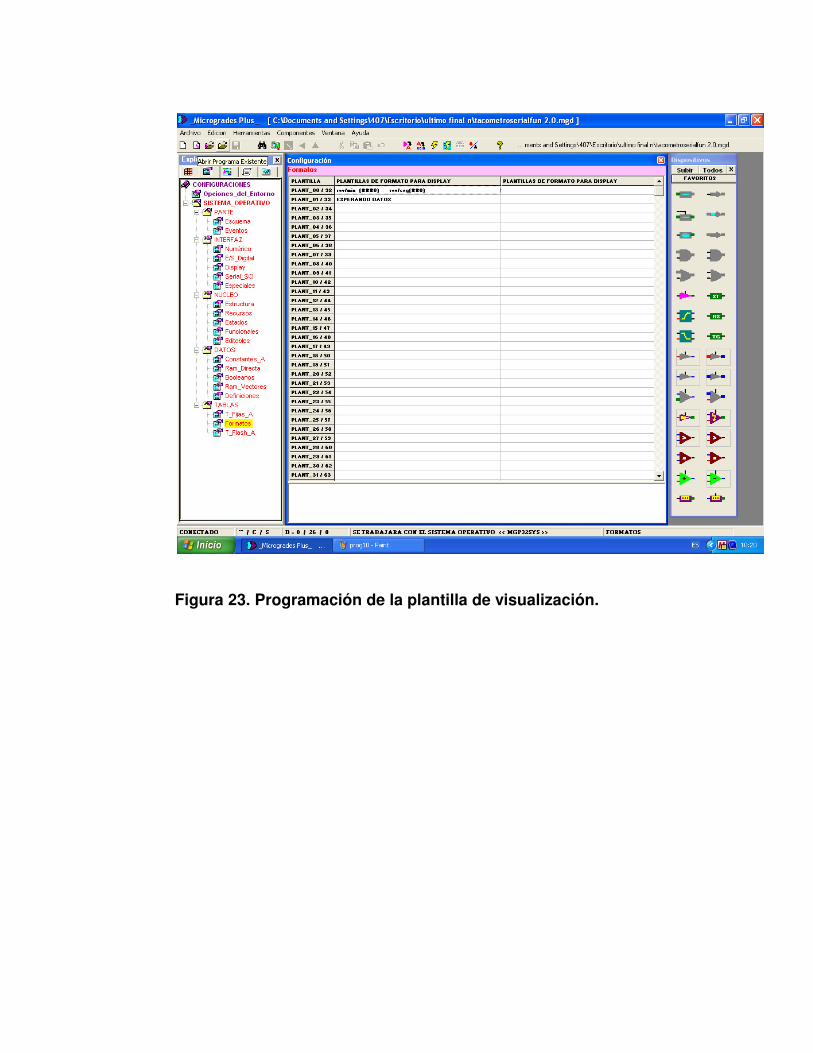
Figura 23. Programación de la plantilla de visualización.
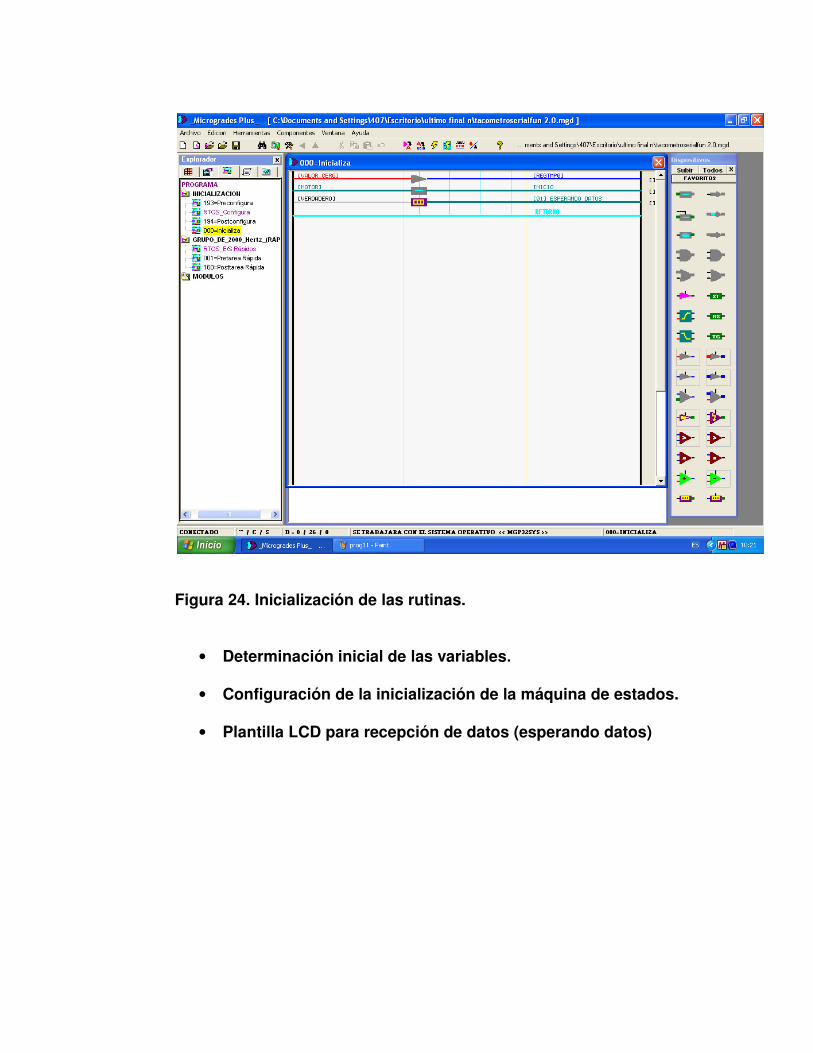
Figura 24. Inicialización de las rutinas.
• Determinación inicial de las variables.
• Configuración de la inicialización de la máquina de estados.
• Plantilla LCD para recepción de datos (esperando datos)
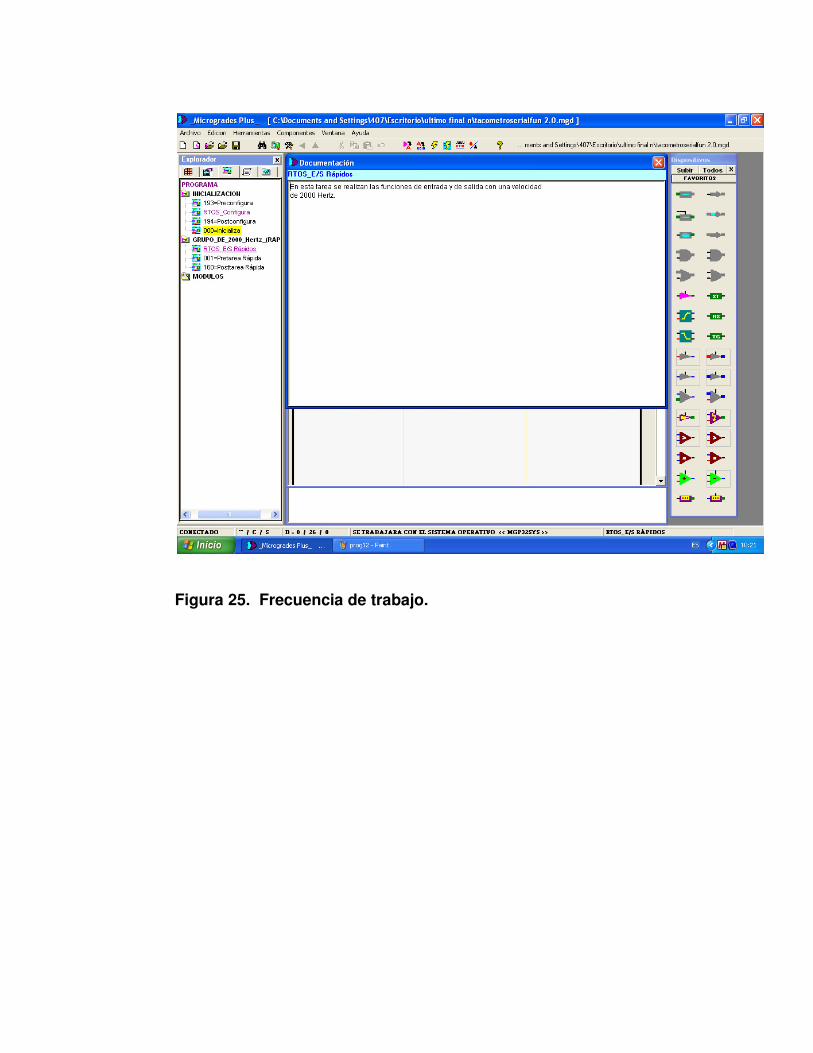
Figura 25. Frecuencia de trabajo.

Figura 26. Módulo de pre- tarea rápida.
• Se convoca a la máquina de estados (motor)
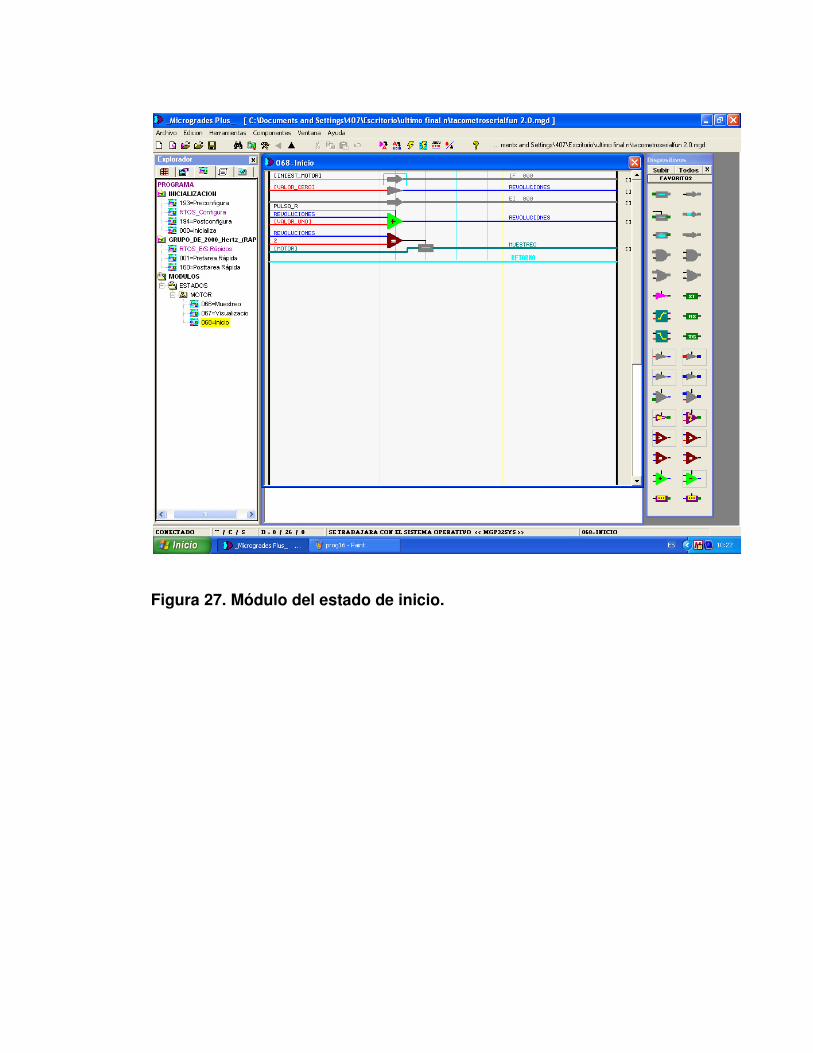
Figura 27. Módulo del estado de inicio.
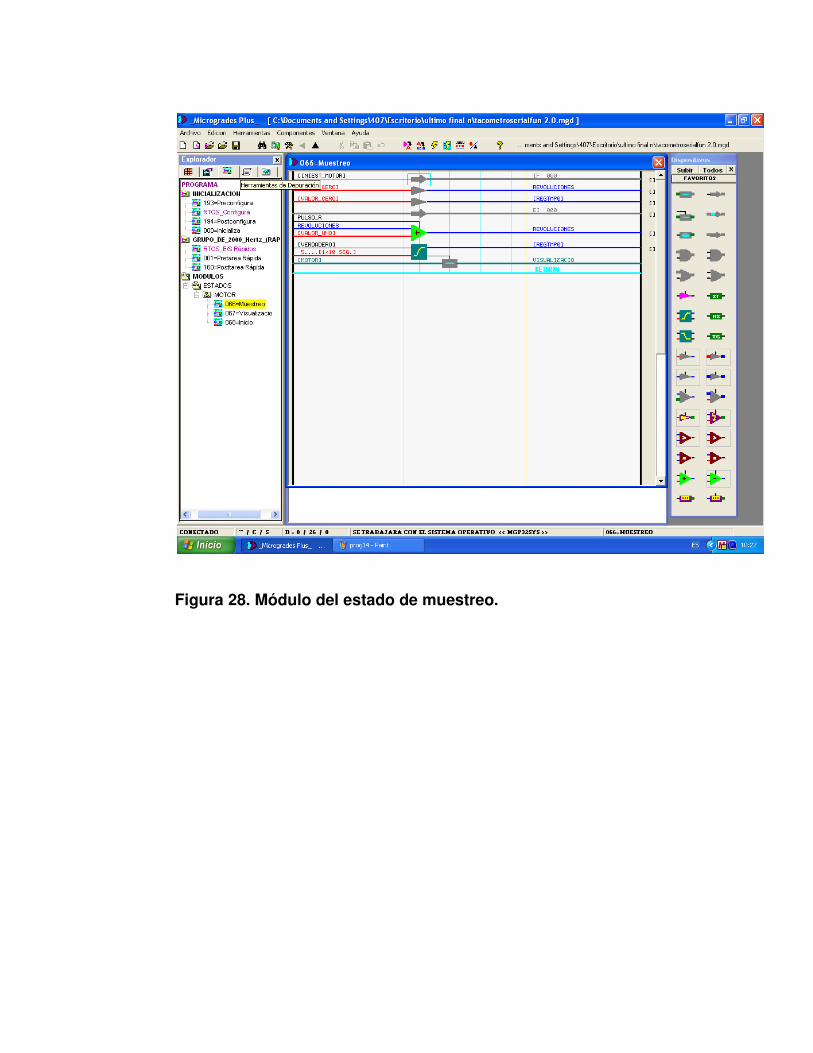
Figura 28. Módulo del estado de muestreo.
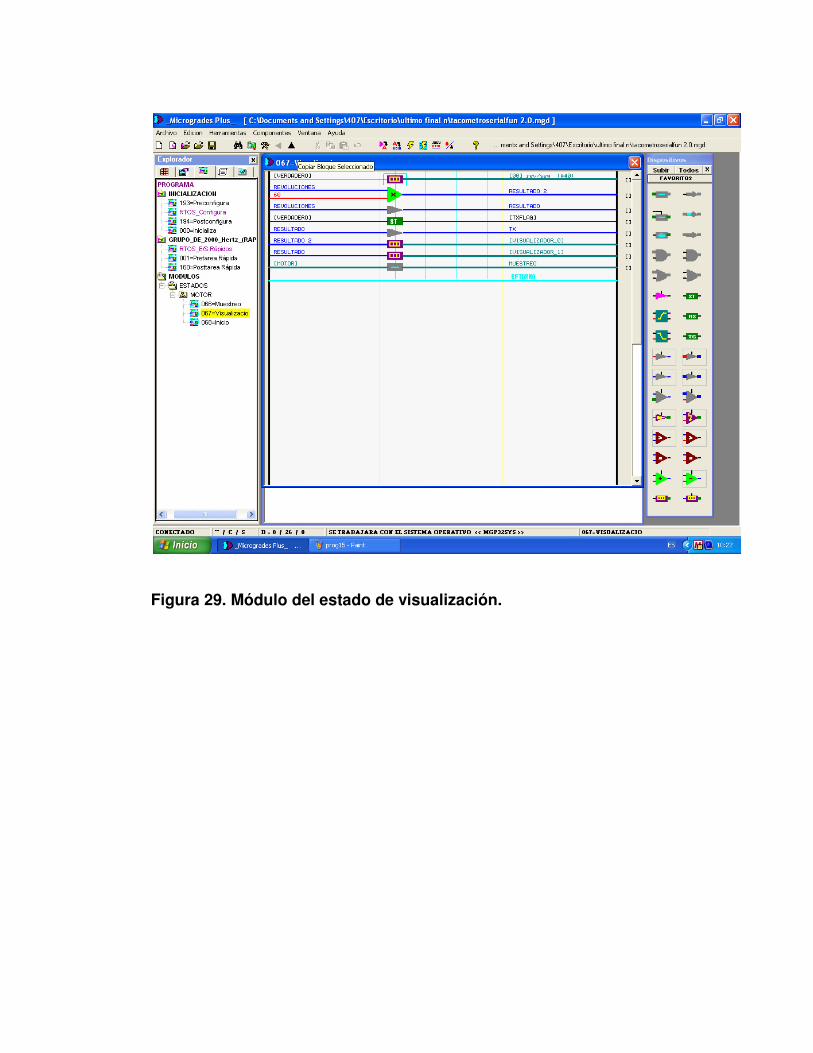
Figura 29. Módulo del estado de visualización.

3.5 PROGRAMACION DE LA INTERFAZ GRÁFICA EN LABVIEW.
Para esta interfaz se decidió utilizar el programa de NI (National Instruments),
Por ser el de más fácil alcance, gracias a que la universidad posee la licencia de
este producto; se puede instalar en cualquier computador de la universidad.
Las figuras de la programación de muestran a continuación:
Figura 30. Ventana de la interfaz gráfica con Labview.
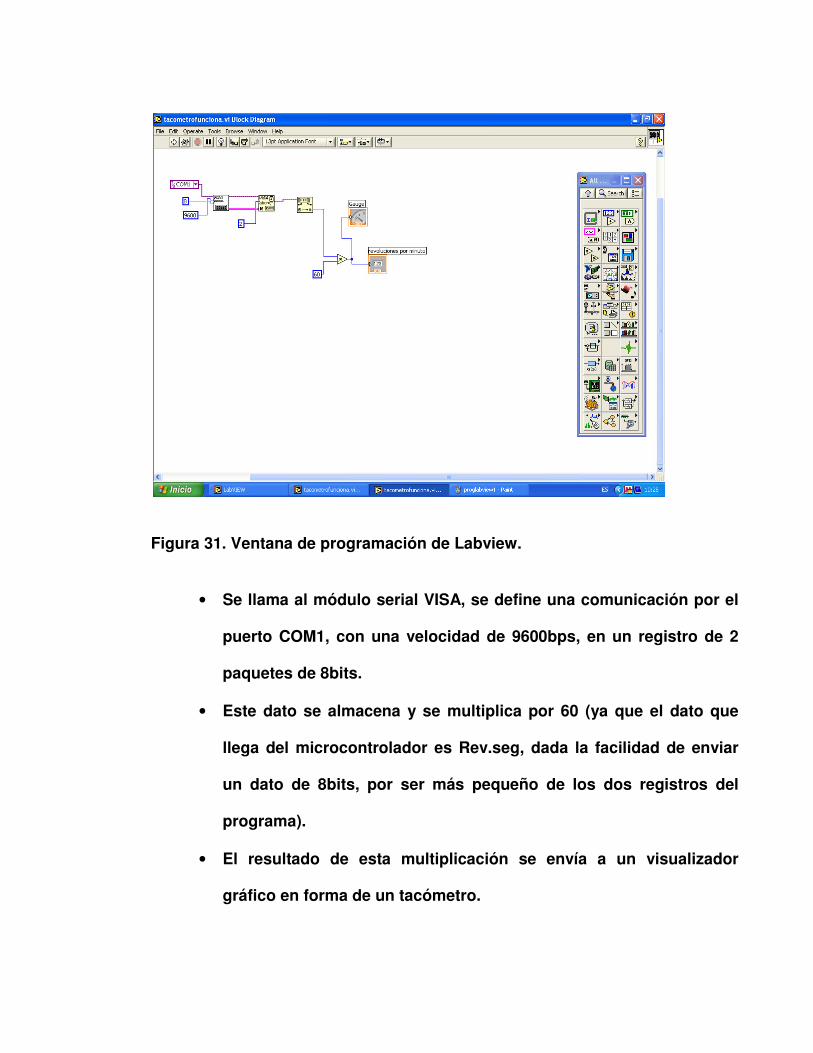
Figura 31. Ventana de programación de Labview.
• Se llama al módulo serial VISA, se define una comunicación por el
puerto COM1, con una velocidad de 9600bps, en un registro de 2
paquetes de 8bits.
• Este dato se almacena y se multiplica por 60 (ya que el dato que
llega del microcontrolador es Rev.seg, dada la facilidad de enviar
un dato de 8bits, por ser más pequeño de los dos registros del
programa).
• El resultado de esta multiplicación se envía a un visualizador
gráfico en forma de un tacómetro.
5. CONCLUSIONES.
El laboratorio de máquinas eléctricas aporta curricularmente a nuestro
programa de ingeniería Mecatrónica y Electrónica en las asignaturas de
máquinas y motores eléctricos y electrónica de potencia; sin mencionar
la pertinencia a cualquier otro programa que quiera incursionar en el
estudio de motores y control de máquinas eléctricas
La construcción de un tacómetro digital implica escoger calidad en los
componentes utilizados, ya que en el mercado encontramos mucha
cantidad a muy buenos precios pero con poca calidad para la
implementación de este tipo de proyectos
El usar la interfaz gráfica de Microgrades se llegó a la conclusión de que
esta herramienta no satisface las necesidades para este tipo de
aplicaciones dado que se presenta mucha lentitud por la cantidad de
subrutinas dedicadas para este proceso
El presupuesto inicial para la culminación de este laboratorio no alcanzó
finalmente y se incrementó en un 120%, que se refleja en los sobrecostos
por elementos de mala calidad y adicionales que surgieron a última hora.
















![Disparadores en ORACLE - KybeleDBD-2008-09]Disparadores.pdfDisparadores en ORACLE Ejemplo Estructura General de un Disparador INVENTARIO (num_producto, descripción, unidades_dispon,](https://static.fdocument.pub/doc/165x107/5e47e7da92f04a3bba7f3c16/disparadores-en-oracle-dbd-2008-09disparadorespdf-disparadores-en-oracle-ejemplo.jpg)

