GRANDEZZE SCALARI E GRANDEZZE VETTORIALI - … · RICHIAMI DI STATICA CONCETTO DI FORZA Il concetto...
116
GRANDEZZE SCALARI E GRANDEZZE VETTORIALI GRANDEZZE FISICHE Nella fisica la descrizione di entità basata solo su grandezze elementari si dimostra inadeguata alla rappresentazione degli oggetti e delle loro relazioni. Le grandezze fisiche si distinguono fondamentalmente in due classi. Quelle che risultano completamente definite quando se ne conosce la sola misura e quelle che richiedono di norma un maggior contenuto informativo. Le grandezze individuate da un solo numero che ne esprime la misura, eventualmente accompagnate da una unità di misura, si dicono grandezze scalari. Sono esempi di grandezze scalari il tempo, la massa, la temperatura, la densità, la frequenza, la carica elettrica. Vi sono invece grandezze che devono essere descritte da un numero, (modulo o intensità), che ne esprime la misura rispetto a una unità prefissata, e anche da una direzione e un verso. Tali grandezze sono dette grandezze vettoriali. Sono esempi di grandezze vettoriali lo spostamento, la forza, il campo elettrico, la velocità, l’accelerazione. SEGMENTI ORIENTATI E VETTORI. Scelta un’unità di misura, ad ogni segmento AB si può associare un numero reale non negativo AB. Sia allora AB la misura della lunghezza del segmento AB . È possibile definire un segmento orientato come quel segmento, di estremi A e B, nel quale sia assegnato un ordine e quindi si possa distinguere un punto iniziale ed uno finale. A tal fine si sceglie il simbolo AB convenendo di considerare A come il punto iniziale e B come quello finale. Graficamente ciò si esprime tramite una freccia che parte da A e giunge in B. Il simbolo BA individua il segmento orientato di verso opposto ad AB e si pone AB - BA = . Si noti che la misura della lunghezza di entrambi è ancora la medesima, AB = BA, e tale misura risulta un numero positivo se B A ≠ , mentre è nulla se B = A . In tal caso il segmento orientato AA è detto segmento orientato nullo. La lunghezza del segmento orientato si dice norma, in fisica intensità o modulo. Un vettore nel piano (o nello spazio) è quindi un ente geometrico caratterizzato da una direzione, un verso e un’intensità (modulo).
Transcript of GRANDEZZE SCALARI E GRANDEZZE VETTORIALI - … · RICHIAMI DI STATICA CONCETTO DI FORZA Il concetto...

GRANDEZZE SCALARI E GRANDEZZE VETTORIALI
GRANDEZZE FISICHE
Nella fisica la descrizione di entità basata solo su grandezze elementari si dimostra inadeguata alla rappresentazione degli oggetti e delle loro relazioni.
Le grandezze fisiche si distinguono fondamentalmente in due classi. Quelle che risultano completamente definite quando se ne conosce la sola misura e quelle che richiedono di norma un maggior contenuto informativo.
Le grandezze individuate da un solo numero che ne esprime la misura, eventualmente accompagnate da una unità di misura, si dicono grandezze scalari.
Sono esempi di grandezze scalari il tempo, la massa, la temperatura, la densità, la frequenza, la carica elettrica.
Vi sono invece grandezze che devono essere descritte da un numero, (modulo o intensità), che ne esprime la misura rispetto a una unità prefissata, e anche da una direzione e un verso. Tali grandezze sono dette grandezze vettoriali.
Sono esempi di grandezze vettoriali lo spostamento, la forza, il campo elettrico, la velocità, l’accelerazione.
SEGMENTI ORIENTATI E VETTORI.
Scelta un’unità di misura, ad ogni segmento AB si può associare un numero reale non
negativo AB. Sia allora AB la misura della lunghezza del segmento AB .
È possibile definire un segmento orientato come quel segmento, di estremi A e B, nel quale sia assegnato un ordine e quindi si possa distinguere un punto iniziale ed uno finale. A tal fine si
sceglie il simbolo AB convenendo di considerare A come il punto iniziale e B come quello finale.
Graficamente ciò si esprime tramite una freccia che parte da A e giunge in B.
Il simbolo BA individua il segmento orientato di verso opposto ad AB e si pone AB-BA = .
Si noti che la misura della lunghezza di entrambi è ancora la medesima, AB = BA, e tale misura risulta un numero positivo se BA ≠ , mentre è nulla se B=A . In tal caso il segmento
orientato AA è detto segmento orientato nullo. La lunghezza del segmento orientato si dice norma, in fisica intensità o modulo.
Un vettore nel piano (o nello spazio) è quindi un ente geometrico caratterizzato da una direzione, un verso e un’intensità (modulo).

2
Un vettore è rappresentato simbolicamente con una freccia la cui lunghezza, rapportata alla lunghezza dell’unità di misura (u), rappresenta il modulo, la retta (r) su cui giace rappresenta la direzione e la punta della freccia rappresenta il verso.
Un vettore può essere indicato in vari modi. I più comuni sono il grassetto (v) o una lettera
con sopra una barretta ( v ). Il modulo di un vettore è indicato con la simbologia v o con il
corsivo v. Si usa invece la notazione AB per individuare il segmento orientato rappresentativo del vettore.
Due vettori si dicono:
equipollenti quando hanno la stessa direzione, lo stesso verso e uguale modulo;
concordi se hanno stessa direzione e stesso verso;
discordi quando hanno stessa direzione e verso contrario;
opposti se hanno uguale intensità e sono discordi.
I punti A e B si chiamano rispettivamente origine ed estremo del vettore.
Se il punto A è fisso il vettore si dice applicato in A, se invece A è un qualunque punto della
retta r, sostegno di ( v ), il vettore si dice applicato ad r. Se non è applicato si dice libero.
SOMMA E DIFFERENZA DI VETTORI
Si ricorda che per sommare vettori si applica la Regola del Parallelogramma, cioè:
“ la somma ( v ) di due vettori 1v e 2v è data da un vettore diretto lungo la diagonale di un
parallelogramma che ha per lati i vettori 1v e 2v ed il cui modulo è rappresentato dalla
lunghezza della diagonale stessa”
Occorre notare che, in generale:
21 vvv +≠
r
u

3
La differenza fra due vettori si ottiene sommando al primo l’opposto del secondo, cioè:
v1-v2 =v1 +(- v2)
Il vettore che risulta dalla somma o dalla differenza di due o più vettori si dice Risultante. Si può dimostrare che il modulo di tale vettore può essere ricavato per via analitica applicando la seguente regola:
siano dati i due vettori v1 e v2 le cui rette d’azione si incontrano formando un angolo α; il modulo del vettore risultante è dato dalla relazione:
αcosvv2vvv 212
22
1 ++=
detta Equazione di Varignon.
Questa equazione è ricavabile facendo ricorso al Teorema di Carnot secondo il quale “in un triangolo qualsiasi il quadrato di un lato è uguale alla somma dei quadrati degli altri due diminuita del doppio prodotto di questi due lati per il coseno dell’angolo fra essi compreso”.
Dato allora un triangolo ABC i cui lati sono a, b, c e gli angoli interni α, β, γ, la misura di un lato è data dalle relazioni:
v1
v2
v=v1+v2
v1
v2 -v2
v1-v2 v1-v2

4
a2=b2+c2 - 2bc cos α b2=a2+c2 – 2ac cos β c2=a2+b2 – 2ab cos γ
Si noti che il teorema di Carnot generalizza il Teorema di Pitagora, a cui si riduce se si considera un triangolo rettangolo.
Ipotizzando che i lati BC e BA del precedente triangolo rappresentino due vettori dei quali si voglia determinare la risultante:
Possiamo allora, utilizzando la figura precedente, disegnare il parallelogramma delle forze ABCD del quale BD rappresenta la diagonale e quindi la risultante delle forze di partenza.
Consideriamo ora il triangolo ABD del quale la diagonale BD del parallelogrammo costituisce il lato b. Applicando allo stesso il Teorema di Carnot si ricava che:
a b
c B
C
A
β
γ
α
c
a b
B
C
A β
γ
180°- β
a
c D
β
a b
c B
C
A
β
γ
α
5
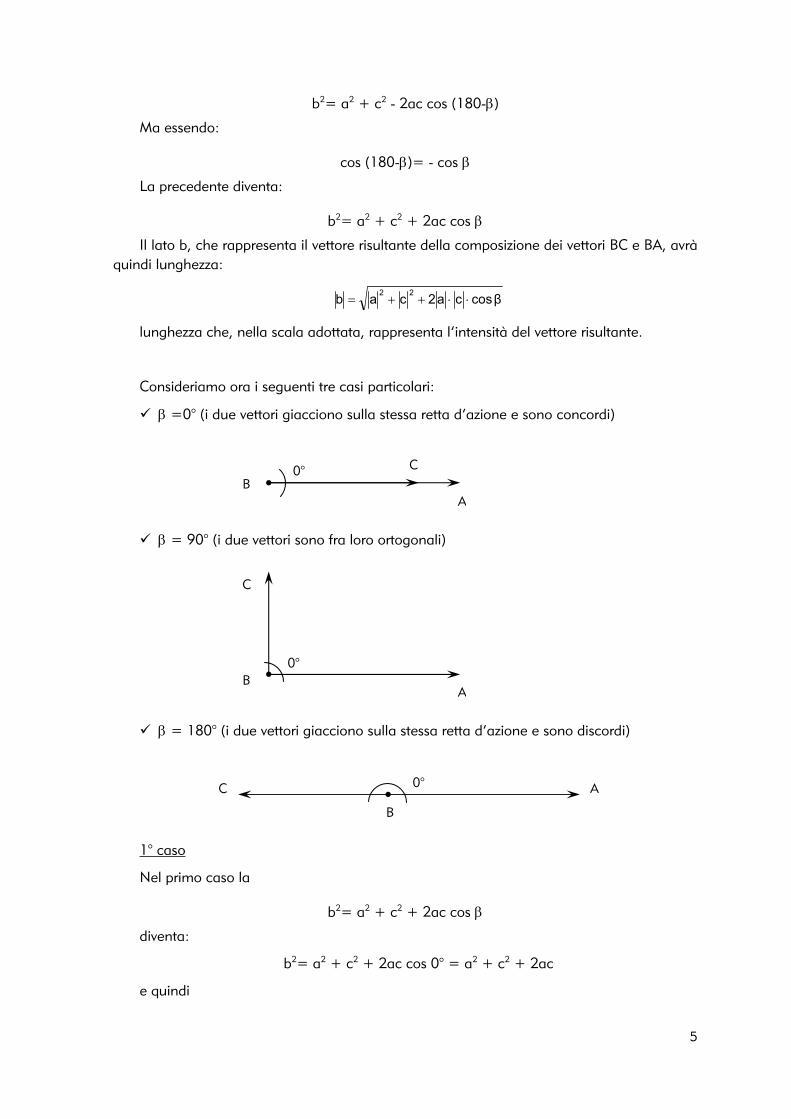
b2= a2 + c2 - 2ac cos (180-β)
Ma essendo:
cos (180-β)= - cos β
La precedente diventa:
b2= a2 + c2 + 2ac cos β
Il lato b, che rappresenta il vettore risultante della composizione dei vettori BC e BA, avrà quindi lunghezza:
βcosca2cab 22⋅⋅++=
lunghezza che, nella scala adottata, rappresenta l’intensità del vettore risultante.
Consideriamo ora i seguenti tre casi particolari:
β =0° (i due vettori giacciono sulla stessa retta d’azione e sono concordi)
β = 90° (i due vettori sono fra loro ortogonali)
β = 180° (i due vettori giacciono sulla stessa retta d’azione e sono discordi)
1° caso
Nel primo caso la
b2= a2 + c2 + 2ac cos β
diventa:
b2= a2 + c2 + 2ac cos 0° = a2 + c2 + 2ac
e quindi
B A
0° C
B A
0°
C
B
A 0° C

6
b2= (a+c)2
cioè:
b=a+c
Quindi quando due vettori giacciono sulla stessa retta d’azione e sono concordi la loro somma è data dalla somma dei loro moduli.
2° caso
La:
b2= a2 + c2 + 2ac cos β
diventa:
b2= a2 + c2 + 2ac cos 90°
cioè:
b2= a2 + c2
che si identifica col Teorema di Pitagora.
3° caso
La:
b2= a2 + c2 + 2ac cos β
diventa:
b2= a2 + c2 + 2ac cos 180°= a2 + c2 -2ac
cioè:
b2= (a - c)2
quindi:
b= a - c
Quando due vettori giacciono sulla stessa retta d’azione e sono discordi la loro somma è data dalla differenza dei loro moduli.

7
RICHIAMI DI STATICA
CONCETTO DI FORZA
Il concetto di forza è un concetto primitivo che, se non correttamente definito, potrebbe apparire alquanto generico e indeterminato. Non è però corretto fornire una definizione generica ed astratta di una entità fondamentale come la forza quando, per essa, si formulano proposizioni matematiche precise e dalla quale si fanno derivare, mediante procedimenti logici, i principi della statica e della dinamica.
E’ da notare inoltre che un concetto fisico può essere ben definito quando nel concetto stesso è implicito un metodo di misura. Si deve pensare quindi che esista la possibilità di considerare una forza come un ente misurabile.
Cerchiamo allora di aiutarci con un esempio per cercare di definire cosa si deve intendere per forza, non prima però di aver ricordato che un corpo in quiete, ma libero di spostarsi all’interno di un sistema di riferimento, si dice soggetto all’azione di una forza quando per effetto di questa inizia a muoversi, oppure, se già in movimento varia l’entità dello stesso. Se invece il corpo non è libero di muoversi rispetto al sistema di riferimento (corpo vincolato), si dice che è soggetto ad una forza quando, per effetto di questa, subisce una deformazione.
Si consideri allora un corpo materiale (P) e verifichiamo che un esempio di forza può essere rappresentato dal peso di tale corpo dal momento che è proprio a causa di questa forza che il corpo, se non ostacolato in qualche modo, si mette in movimento lungo una particolare direzione, la direzione del filo a piombo (la verticale) e con un certo verso di movimento (verso il centro della terra).
Se colleghiamo il corpo ad una estremità di un filo elastico (f), il cui altro capo sia fissato stabilmente, il filo subirà una deformazione e, in particolare, si allungherà. Sostituendo il corpo materiale (P) con altri di peso diverso vedremo che il filo subirà allungamenti diversi e potremo verificare che le entità degli allungamenti dipenderanno dai diversi pesi dei corpi applicati al filo. Stabilito infatti un peso campione, potremo applicare al filo dei pesi pari a 2, 3, …, n volte il
peso campione e noteremo che il filo subirà degli allungamenti l1, l2, …, ln. Avremo così
costruito una scala dei pesi che ci potrà consentire di misurare l’intensità di forze qualsiasi. Se applicheremo infatti all’estremità del filo elastico una forza diretta lungo il suo asse l’intensità della forza applicata sarà uguale a quella del peso che produce un uguale spostamento.
Tale dispositivo (detto dinamometro) consentirà così di mettere in relazione gli allungamenti del filo con le forze applicate e si potrà ancora convenire che l’entità della forza che muove il corpo possa essere rappresentata dal numero che esprime l’allungamento del filo elastico (delle caratteristiche e nelle condizioni stabilite) o da un numero proporzionale all’allungamento.
Ma per caratterizzare una forza non è sufficiente determinare la sua intensità poiché occorre anche specificare la direzione lungo la quale agisce, il verso secondo cui si esplica e il

8
suo punto di applicazione. Vedremo in seguito che una forza potrà quindi essere completamente caratterizzata mediante un vettore applicato.
Fig. 1
Si è visto il caso di un corpo che tende a muoversi ma un ragionamento del tutto analogo può essere fatto anche nel caso opposto, cioè quello di un corpo in quiete che sotto un'azione esterna si metta in movimento. Si dice allora, che anche questo corpo sarà soggetto ad una forza.
Si può quindi generalizzare il concetto di forza col dire:
“Dato un punto materiale libero di muoversi si intende per forza una grandezza fisica in grado di modificare lo stato di quiete o di moto (capace cioè di produrre o modificare un movimento) rispetto a un sistema inerziale1”.
“Per caratterizzare uno forza occorre definirne intensità, direzione, verso di azione e punto di applicazione”.
Si può quindi rappresentare una forza con un segmento orientato2 la cui lunghezza, una volta definita una unità di misura (u), rappresenta l'intensità della forza, e la cui direzione e verso (quest’ultimo indicato da una freccia) indicano la direzione ed il verso della forza.
Queste peculiarità delle forze inducono a pensare che esse siano grandezze vettoriali ma questo potrà essere confermato solo se saremo in grado di dimostrare che esse seguono la “regola del parallelogramma”, cosa che sarà verificata in seguito.
“Due forze si dicono equipollenti quando hanno lo stesso modulo, la stessa direzione e lo stesso verso”. Ciò significa che due frecce che hanno lunghezza, direzione e verso uguali ma diversi punti di applicazione sono due diverse rappresentazioni della tessa forza (fig. 2a).
Fig. 2
1 Un sistema inerziale è un sistema avente accelerazione nulla. Le leggi della fisica sono sempre le stesse per tutti i sistemi inerziali. Usualmente si fissa come sistema di riferimento la Terra nonostante che questa compia un moto di rotazione attorno al proprio asse, uno di rivoluzione attorno al sole, ecc.. Tale definizione si basa sulla constatazione a cui giunse Galileo conducendo un esperimento ideale secondo il quale dall’interno di una navicella non è possibile valutare se questa sia ferma o si muova di moto rettilineo uniforme. Galileo concluse che non è possibile distinguere lo stato di quiete da uno stato di moto con accelerazione nulla. 2 Un segmento si dice orientato quando è fissato su di esso un verso da assumersi come positivo.
pp’ P
f
P
P’ F
F
F
a) F. Equipollenti b) F. non Equipollenti
F1
F2
9
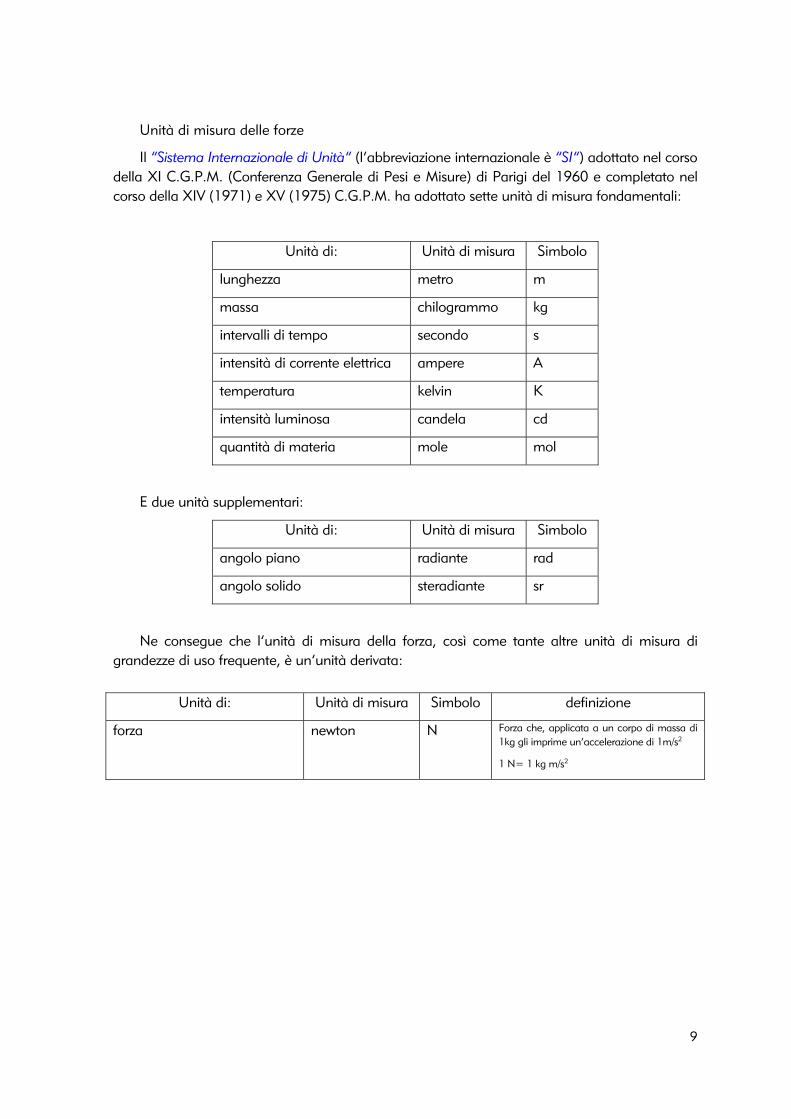
Unità di misura delle forze
Il “Sistema Internazionale di Unità” (l’abbreviazione internazionale è “SI”) adottato nel corso della XI C.G.P.M. (Conferenza Generale di Pesi e Misure) di Parigi del 1960 e completato nel corso della XIV (1971) e XV (1975) C.G.P.M. ha adottato sette unità di misura fondamentali:
Unità di: Unità di misura Simbolo
lunghezza metro m
massa chilogrammo kg
intervalli di tempo secondo s
intensità di corrente elettrica ampere A
temperatura kelvin K
intensità luminosa candela cd
quantità di materia mole mol
E due unità supplementari:
Unità di: Unità di misura Simbolo
angolo piano radiante rad
angolo solido steradiante sr
Ne consegue che l’unità di misura della forza, così come tante altre unità di misura di grandezze di uso frequente, è un’unità derivata:
Unità di: Unità di misura Simbolo definizione
forza newton N Forza che, applicata a un corpo di massa di 1kg gli imprime un’accelerazione di 1m/s2
1 N= 1 kg m/s2

10
FORZE APPLICATE AI CORPI
Si dice che “ad un corpo è applicata una forza se esso, trovandosi inizialmente in condizione di quiete e non essendo impedito a muoversi, tende a mettersi in movimento e si muove effettivamente mentre, se è trattenuto nella sua posizione da uno o più vincoli, questi si deformano più o meno a seconda della loro rigidità”.
A noi interessa in particolar modo studiare quali siano gli effetti indotti da forze applicate ai corpi. In particolare interessa conoscere:
− in primo luogo quali ripercussioni hanno queste forze ai fini dell'equilibrio dei corpi stessi se considerati come corpi rigidi, cioè corpi ideali che non possono essere deformati dalle forze;
− in secondo luogo interessa conoscere quali siano le sollecitazioni indotte nei corpi dalle forze agenti.
Ecco allora che entra in gioco un elemento fondamentale per caratterizzare una forza: il “punto di applicazione” della forza al corpo.
Il punto di applicazione è infatti determinante nel qualificare e quantificare l'effetto di una forza su un corpo.
Si deve intanto notare che in genere il punto di applicazione si rappresenta mediante un puntino che, idealmente, collega il segmento che rappresenta la forza col corpo.
Si è abituati a considerare il punto di applicazione posizionato sul segmento dalla parte opposta della freccia ma ciò non è corretto. Il punto di applicazione può essere localizzato in qualsiasi punto del segmento che rappresenta la forza o anche fuori da esso lungo la sua retta d'azione.
Fig. 3
“Quando una forza si sposta lungo la propria retta d'azione l'effetto sul corpo non cambia, purché non cambi il punto di applicazione”.
E' da notare che quando una forza cambia la propria direzione traslando parallelamente a se stessa l'effetto su un corpo cambia sempre perché cambia il punto di applicazione.
E' superfluo notare che quando una forza ruota attorno al punto di applicazione l'effetto di questa sul corpo cambia perché cambia la sua direzione.
F3
F2
F4
Punti di applicazione
F1

11
CONVENZIONE DEI SEGNI PER LE FORZE E LORO DESIGNAZIONE
Le forze vengono considerate, nei normali calcoli, come affette da un segno, che è strettamente legato al loro verso. Ciò allo scopo di distinguere il verso delle forze e di tradurre in termini matematici i problemi da risolvere.
Nel caso più generale si usa dare, per le forze che normalmente entrano in gioco nei problemi delle costruzioni:
Segno positivo:
− alle forze che vanno verso il basso, − alle forze che vanno da sinistra a destra.
Segno negativo:
− alle forze che vanno verso l’alto, − alle forze che vanno da destra a sinistra.
Fig. 4
In genere le forze vengono contraddistinte mediante lettere maiuscole dell'alfabeto latino sormontate da una freccia (che spesso viene omessa). Nella pratica sono comunemente usate le lettere P per i pesi (forze con direzione verticale ed orientate verso il basso)3 ed F per le forze altrimenti orientate. Sono frequentemente usate anche le lettere Q, per indicare la risultante di carichi ripartiti, q, per indicare i valori unitari dei carichi ripartiti ed S per indicare le spinte.
Le forze possono anche essere individuate da numeri posti agli estremi del segmento che le rappresenta.
Designare una forza come 01 significa che si tratta di una forza misurata dal segmento 01, avente verso da 0 a 1 e come linea d’azione quella su cui giace il segmento stesso.
Noi considereremo generalmente solo forze giacenti su uno stesso piano (forze complanari).
REGOLA DEL PARALLELOGRAMMA DELLE FORZE O DI GALILEO
Si consideri un filo inestensibile appoggiato su due pulegge complanari, che ipotizziamo poter ruotare senza attrito, e alle cui estremità siano attaccati i due pesi P1 e P2 (Fig. 5).
3 Il Secondo Principio della Dinamica (Legge Fondamentale della Dinamica) dice che “L’accelerazione di un punto materiale è in ogni istante direttamente proporzionale alla forza applicata; forza e accelerazione hanno sempre la
stessa direzione e lo stesso verso” amF = .
F1
F2 +
F3
F4
_
12
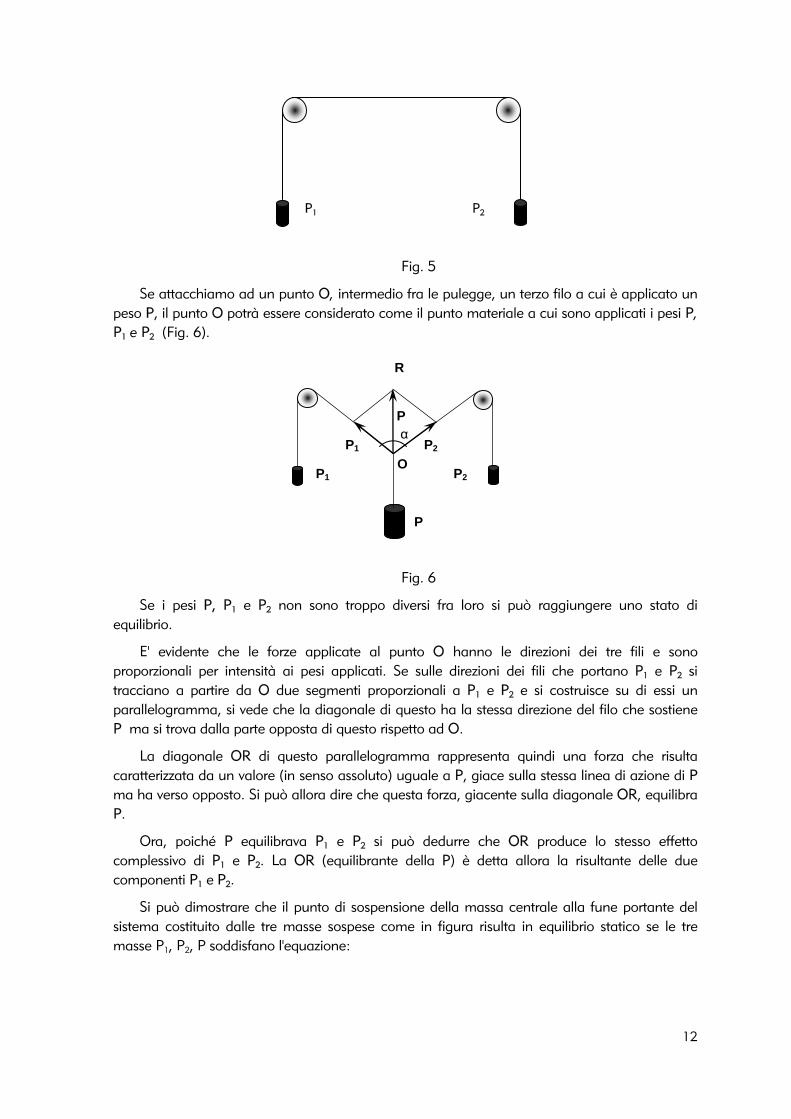
Fig. 5
Se attacchiamo ad un punto O, intermedio fra le pulegge, un terzo filo a cui è applicato un peso P, il punto O potrà essere considerato come il punto materiale a cui sono applicati i pesi P, P1 e P2 (Fig. 6).
Fig. 6
Se i pesi P, P1 e P2 non sono troppo diversi fra loro si può raggiungere uno stato di equilibrio.
E' evidente che le forze applicate al punto O hanno le direzioni dei tre fili e sono proporzionali per intensità ai pesi applicati. Se sulle direzioni dei fili che portano P1 e P2 si tracciano a partire da O due segmenti proporzionali a P1 e P2 e si costruisce su di essi un parallelogramma, si vede che la diagonale di questo ha la stessa direzione del filo che sostiene P ma si trova dalla parte opposta di questo rispetto ad O.
La diagonale OR di questo parallelogramma rappresenta quindi una forza che risulta caratterizzata da un valore (in senso assoluto) uguale a P, giace sulla stessa linea di azione di P ma ha verso opposto. Si può allora dire che questa forza, giacente sulla diagonale OR, equilibra P.
Ora, poiché P equilibrava P1 e P2 si può dedurre che OR produce lo stesso effetto complessivo di P1 e P2. La OR (equilibrante della P) è detta allora la risultante delle due componenti P1 e P2.
Si può dimostrare che il punto di sospensione della massa centrale alla fune portante del sistema costituito dalle tre masse sospese come in figura risulta in equilibrio statico se le tre masse P1, P2, P soddisfano l'equazione:
P1 P2
P1 P2
P
P2P1
P
R
O
α

13
P2 = P12 + P2
2 + 2P1P2cosα (4) indicando in essa, con α, l’angolo compreso fra le forze P1 e P2.
In tal modo si è giustificata sperimentalmente la regola di composizione delle forze applicate ad uno stesso punto e poiché tali forze si compongono con la regola del parallelogramma queste si possono considerare “grandezze vettoriali”.
Con lo stesso procedimento si opera se entra in gioco una terza forza, componendo questa con la risultante delle prime due fino ad ottenere una risultante R2 e così si può procedere fino ad aver esaurito il numero delle forze considerate.
“La risultante di un sistema di forze si ottiene componendo la risultante delle prime due forze con la terza forza, la nuova risultante con la quarta forza ecc.; le risultanti passeranno sempre per il punto di incontro delle linee di azione delle prime due forze considerate”.
Visto quindi che le forze sono dei vettori abbiamo la possibilità di sfruttare le proprietà dei vettori stessi per risolvere alcuni dei problemi pratici che si incontrano nei casi reali. In particolare può essere trovata soluzione al problema della composizione e scomposizione delle forze, argomento che nel campo delle costruzioni riveste notevole importanza.
SISTEMI DI FORZE
“Si definisce sistema di forze l'insieme di più forze agenti su un corpo”.
Facendo riferimento al piano queste possono trovarsi in uno dei seguenti casi:
− avere la stessa linea d'azione, − avere linee d'azione concorrenti in un punto, − avere linee d'azione non concorrenti in un punto.
Come si è visto precedentemente quella forza che applicata ad un corpo rigido produce lo stesso effetto di varie forze applicate si chiama risultante. La risultante può essere ricercata mediante una operazione detta composizione delle forze. L'operazione inversa, cioè la ricerca delle componenti che possono originare una forza dicesi scomposizione della forza.
“Quando la risultante di un sistema di forze è nulla il sistema si dice in equilibrio”.
“L'equilibrante di una forza è una forza che ha la stessa direzione ed intensità ma verso contrario”.
COMPOSIZIONE E SCOMPOSIZIONE DELLE FORZE
Per risolvere il problema della composizione delle forze si possono utilizzare tre procedimenti. Si può cioè applicare:
− il metodo del parallelogramma delle forze, − il metodo delle risultanti successive, − il metodo del poligono funicolare.
Al metodo del parallelogramma delle forze, applicabile anche ad un sistema di forze non complanari, si è accennato precedentemente.
4 Che corrisponde all’equazione: αcosvv2+v+v=v 21
22
21 (equazione di Varignon) ricordata nel
capitolo relativo ai vettori.

14
Il metodo delle risultanti successive discende da quello del parallelogramma ed è applicabile solo a forze complanari.
Fig. 7
Esso consiste nel riportare in scala, una di seguito all'altra facendo ricorso a forze equipollenti alle forze date, le forze in oggetto in modo da ottenere una poligonale (poligonale delle forze). Nel compiere tale operazione possono verificarsi due casi:
1. il primo punto della prima forza non coincide col punto estremo dell’ultima forza (poligonale aperta),
2. il primo punto della prima forza coincide col punto estremo dell’ultima forza (poligonale chiusa).
Nel primo caso appare evidente che collegando il primo e l’ultimo vertice della poligonale si ottiene la risultante del sistema di forze. Il lato che chiude la poligonale rappresenta in intensità e verso (ma non per quanto riguarda la retta d'azione) la risultante (Fig. 7).
Nel secondo caso si rileva invece che, essendo la distanza fra il primo e l’ultimo punto pari a zero, il modulo della risultante è nullo e quindi il sistema di forze è in equilibrio.
COMPOSIZIONE DI FORZE APPLICATE AD UNO STESSO PUNTO
Possono aversi tre casi:
1° caso: forze aventi la stessa linea d'azione.
“La risultante di forze che hanno la stessa linea di azione è una forza la cui intensità è data dalla somma algebrica delle intensità delle forze componenti e che agisce sempre sulla stessa linea d'azione di queste”.
Date le forze F1 ed F2 applicate al punto P, la composizione di dette forze può essere messa in evidenza graficamente mediante la Fig. 8.
F1
F2
F3
0
1
2
3
R
F1
F2
F3

15
Fig. 8
“Se la somma algebrica è nulla il sistema si dice in equilibrio”.
E' intuitivo infatti che se due forze, applicate ad uno stesso punto ed agenti su una stessa direzione, hanno uguale intensità e verso opposto sono in equilibrio.
2° caso: forze non aventi la stessa linea d'azione
a) Composizione di forze applicate ad uno stesso punto.
Qualora due o più forze concorrenti vengano applicate ad un corpo questo si sposta secondo la linea di azione ed il verso della risultante delle forze concorrenti.
Siano date due forze F1 ed F2 agenti lungo due linee d'azione diverse che si incontrano nel punto A (Fig. 9a).
Fig. 9a Fig. 9b
Applicando la regola del parallelogramma delle forze otteniamo la diagonale del parallelogramma ABCD che è la risultante R1 delle due forze date.
Con lo stesso procedimento si opera se entra in gioco una terza forza F3 (Fig. 9b), componendo quest'ultima con la risultante delle prime due e ottenendo la risultante R2, che è risultante di F1, F2 ed F3; e così via fino ad aver esaurito il numero delle forze considerate.
La risultante del sistema di forze dunque si ottiene componendo la risultante delle prime due forze con la terza forza, la nuova risultante con la quarta forza, ecc. e le risultanti passeranno sempre per il punto di incontro delle linee di azione delle forze considerate.
b) Composizione di forze non applicate ad uno stesso punto ma aventi direzioni concorrenti.
Qualora più forze siano applicate a punti diversi di uno stesso corpo ma le loro direzioni concorrano in un punto comune, la risultante del sistema di forze può essere ricavata facendo scorrere le forze fino ad incontrarsi ed applicando poi il metodo del parallelogramma (Fig. 10).
R1
D
F1
A
F2
B
C
A
B
C
D
F1
R1
F2
R2
F3
E
F
F1 P F2 F1
R F2

16
Fig. 10
3° caso: forze aventi linee d'azione non concorrenti in un punto. Poligono funicolare.
Nel caso in cui si dovessero comporre più forze giacenti nel piano non passanti per lo stesso punto si potrà usare la regola del parallelogramma con la ricerca delle risultanti successive R1, R2, ...Rn ma è preferibile ricorrere al metodo del “poligono funicolare” che ci consente di determinare anche le linee di azione delle forze.
Fig. 11
A
F1
F2
F1 F2 F3
F4
R
F1
0
1
F2
2
F3
3
4
P
F4
Fig. 11 a
Fig. 11 b
A
B
R
17
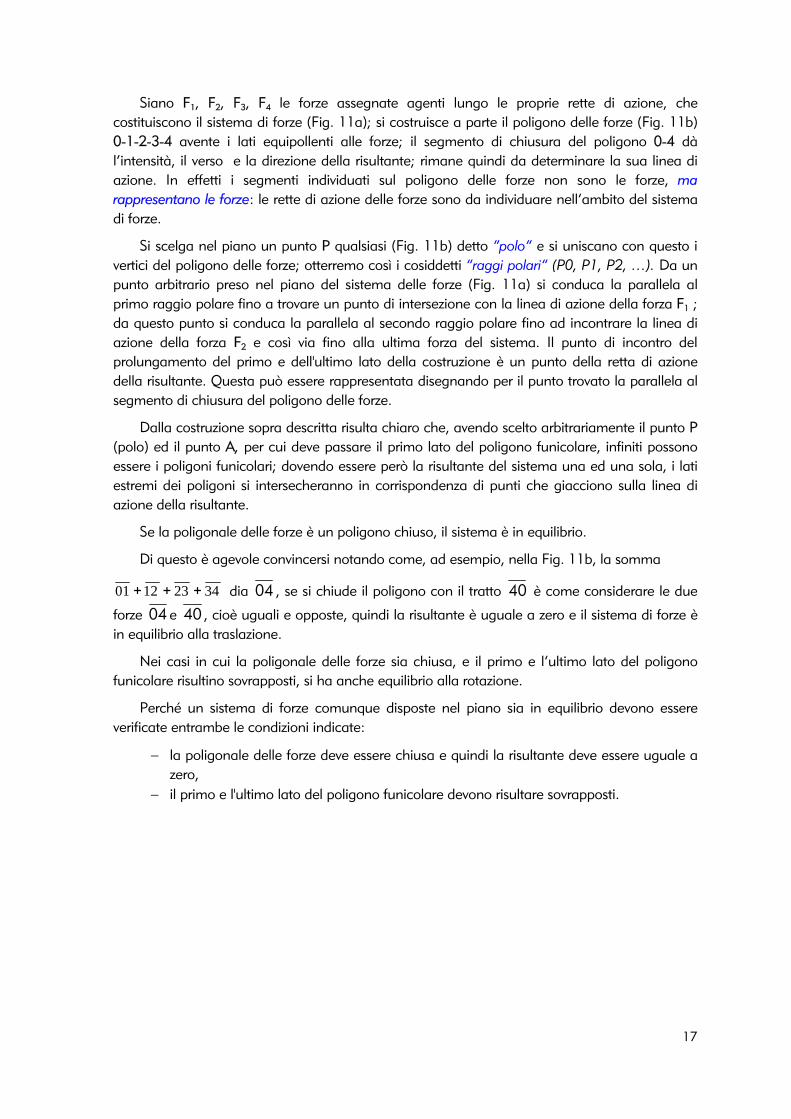
Siano F1, F2, F3, F4 le forze assegnate agenti lungo le proprie rette di azione, che costituiscono il sistema di forze (Fig. 11a); si costruisce a parte il poligono delle forze (Fig. 11b) 0-1-2-3-4 avente i lati equipollenti alle forze; il segmento di chiusura del poligono 0-4 dà l’intensità, il verso e la direzione della risultante; rimane quindi da determinare la sua linea di azione. In effetti i segmenti individuati sul poligono delle forze non sono le forze, ma rappresentano le forze: le rette di azione delle forze sono da individuare nell’ambito del sistema di forze.
Si scelga nel piano un punto P qualsiasi (Fig. 11b) detto “polo” e si uniscano con questo i vertici del poligono delle forze; otterremo così i cosiddetti “raggi polari” (P0, P1, P2, …). Da un punto arbitrario preso nel piano del sistema delle forze (Fig. 11a) si conduca la parallela al primo raggio polare fino a trovare un punto di intersezione con la linea di azione della forza F1 ; da questo punto si conduca la parallela al secondo raggio polare fino ad incontrare la linea di azione della forza F2 e così via fino alla ultima forza del sistema. Il punto di incontro del prolungamento del primo e dell'ultimo lato della costruzione è un punto della retta di azione della risultante. Questa può essere rappresentata disegnando per il punto trovato la parallela al segmento di chiusura del poligono delle forze.
Dalla costruzione sopra descritta risulta chiaro che, avendo scelto arbitrariamente il punto P (polo) ed il punto A, per cui deve passare il primo lato del poligono funicolare, infiniti possono essere i poligoni funicolari; dovendo essere però la risultante del sistema una ed una sola, i lati estremi dei poligoni si intersecheranno in corrispondenza di punti che giacciono sulla linea di azione della risultante.
Se la poligonale delle forze è un poligono chiuso, il sistema è in equilibrio.
Di questo è agevole convincersi notando come, ad esempio, nella Fig. 11b, la somma
34231201 +++ dia 04 , se si chiude il poligono con il tratto 40 è come considerare le due
forze 04 e 40 , cioè uguali e opposte, quindi la risultante è uguale a zero e il sistema di forze è in equilibrio alla traslazione.
Nei casi in cui la poligonale delle forze sia chiusa, e il primo e l’ultimo lato del poligono funicolare risultino sovrapposti, si ha anche equilibrio alla rotazione.
Perché un sistema di forze comunque disposte nel piano sia in equilibrio devono essere verificate entrambe le condizioni indicate:
− la poligonale delle forze deve essere chiusa e quindi la risultante deve essere uguale a zero,
− il primo e l'ultimo lato del poligono funicolare devono risultare sovrapposti.
18
COMPOSIZIONE DI FORZE COMPLANARI PARALLELE
Particolarmente interessante per le applicazioni pratiche è il caso di composizione di forze parallele.
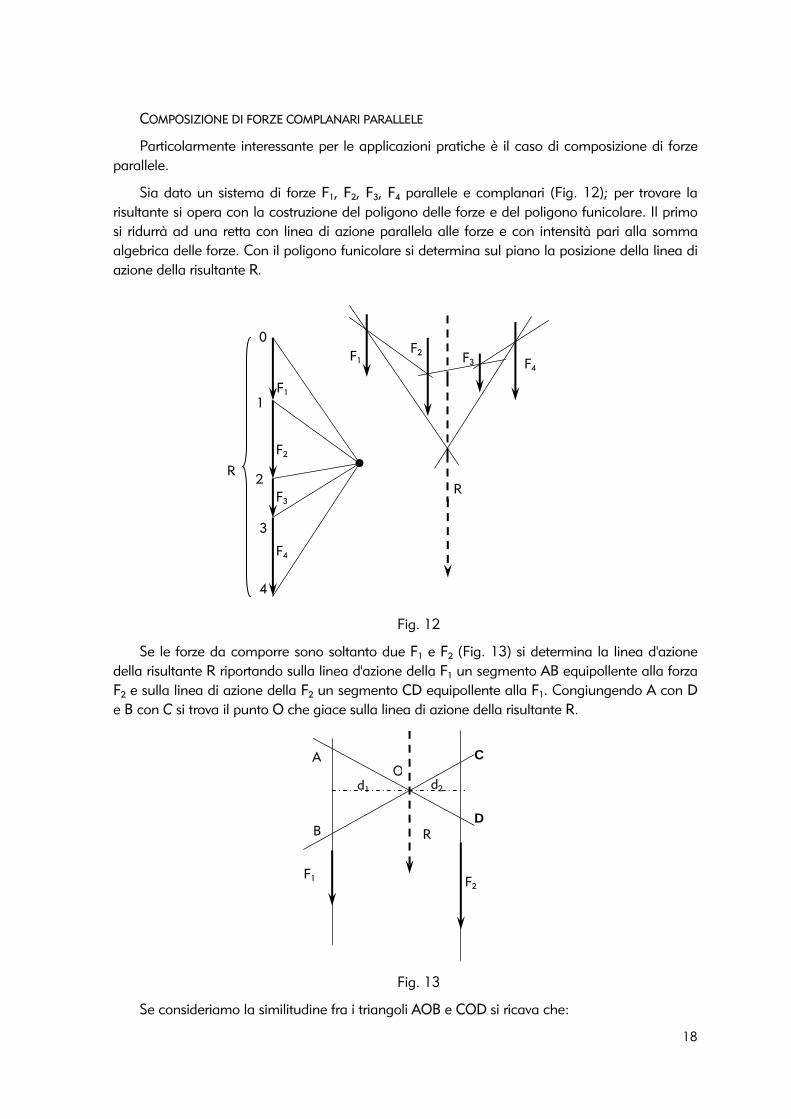
Sia dato un sistema di forze F1, F2, F3, F4 parallele e complanari (Fig. 12); per trovare la risultante si opera con la costruzione del poligono delle forze e del poligono funicolare. Il primo si ridurrà ad una retta con linea di azione parallela alle forze e con intensità pari alla somma algebrica delle forze. Con il poligono funicolare si determina sul piano la posizione della linea di azione della risultante R.
Fig. 12
Se le forze da comporre sono soltanto due F1 e F2 (Fig. 13) si determina la linea d'azione della risultante R riportando sulla linea d'azione della F1 un segmento AB equipollente alla forza F2 e sulla linea di azione della F2 un segmento CD equipollente alla F1. Congiungendo A con D e B con C si trova il punto O che giace sulla linea di azione della risultante R.
Fig. 13
Se consideriamo la similitudine fra i triangoli AOB e COD si ricava che:
P
R
F1 0
1
F2 F3
3
4
R
F4
F1
F2
F3
F4
2
A
F1 F2
B
C
D
Od2 d1
R

19
1
2
2
1
FF
dd
=
SCOMPOSIZIONE DI UNA FORZA IN DUE SECONDO LINEE DI AZIONE DATE
La scomposizione di una forza in due secondo linee di azione date si effettua seguendo le operazioni inverse rispetto a quelle sopra dette, applicando cioè il procedimento inverso della regola del parallelogramma. Data la forza R (Fig. 14) si tracciano per un suo estremo (A) le linee di azione (r, s) lungo le quali devono agire le forze.
Fig. 14 Fig. 15
Quindi si tracciano per l’altro estremo della R le parallele alle linee d’azione date. Si ottiene così un parallelogramma i cui lati concorrenti in A definiscono le forze cercate.
Si ricordi che, affinché sia possibile scomporre una forza nelle due componenti è necessario che tutte e tre le rette d’azione (della forza data e delle due componenti incognite) si incontrino in uno stesso punto (fig. 16). Ciò appare evidente se si considera che, per la regola del parallelogrammo, sulle tre rette d’azione stanno i due lati contigui e la diagonale del parallelogrammo, che quindi hanno il punto di vertice in comune. Non sarà invece possibile scomporre la forza in due componenti se le tre rette di azione non si incontrano in uno stesso punto.
Fig. 16a Fig. 16b
In alternativa, per individuare l’intensità delle forze incognite si può operare tracciando il poligono delle forze (in questo caso un triangolo delle forze) (Fig. 15). Si traccia la parallela (02) alla R nota, quindi da un estremo di questa si traccia la parallela ad una delle due direzioni.
Dall’altro estremo la parallela all’altra direzione. Nel triangolo così individuato 01 corrisponde
SI
s t
r
NO
r
t s
R R
F1
F2R
A F1
F2
R
0
1
2
r
s

20
alla 02 più 21. Sono noti così il verso (da 0 verso 2) e da 2 verso 1) delle due componenti e il modulo delle stesse individuato dalla lunghezza di ciascun segmento letto nella scala delle forze.
SCOMPOSIZIONE DI UNA FORZA SECONDO RETTE D'AZIONE PARALLELE
Anche per la scomposizione delle forze, il caso di rette di azione parallele è particolarmente interessante, in quanto è molto comune nelle strutture.
Sia da scomporre una forza R in due componenti F1 e F2 ad essa parallele di cui sono date le linee di azione (Fig. 17). Si segue una procedura inversa rispetto a quella vista a proposito del poligono funicolare, e cioè: si costruisce un poligono funicolare qualsiasi connettendo le tre linee d'azione delle forze e si disegna poi il poligono delle forze. Questo avrà il lato 02 di lunghezza pari alla risultante R. Il polo P viene individuato tracciando per gli estremi 0 e 2 della risultante
le parallele a l2 ed l3. Se per P si traccia la parallela ad l1, questa intercetta sulla risultante un
punto che definisce l’intensità di F1 ed F2. Operando nella maniera inversa sarà facile avere una spiegazione di questa costruzione.
Fig. 17
R
F1
F2
2
0
F1
l3 l2
l1
1 P
R
F2

21
MOMENTI STATICI DELLE FORZE
Si definisce “momento statico”, o “momento di primo ordine” di una forza F rispetto ad un
punto qualsiasi P (detto “centro dei momenti” o “polo”) o ad una retta ad essa parallela detta
asse, il prodotto della intensità della forza per la distanza d (detta “braccio di leva”, o
semplicemente “braccio”) della linea d’azione della forza dal punto o dall'asse (Fig. 18).
dFM ×=
“Dimensionalmente il momento si esprime mediante il prodotto fra l’unità di misura della
forza e l’unità di misura della lunghezza” (es. N x cm).
Fig. 18
Dalla definizione di momento si può dedurre che due forze di uguale intensità, applicate ad
uno stesso corpo possono avere un diverso effetto, ai fini della loro azione sul corpo, nel caso
che generino momenti di entità diversa.
Dalla figura 19 si nota che delle due forze F1 ed F2 (di uguale intensità) la F2, generando un
momento maggiore della F1, tende a far ruotare più facilmente il corpo attorno al punto A.
Fig. 19
Intendendosi quindi per momento anche la capacità di una forza di far ruotare un corpo,
per convenzione assumiamo il momento come positivo quando tende a far ruotare il corpo in
senso destrorso, cioè nel senso di rotazione delle lancette dell'orologio, negativo nel senso
contrario (Fig. 20).
Fig. 20
d d
r
P
F F
F2
F1
A a
b •
+ –

22
Teorema di Varignon o dei momenti statici
“La somma dei momenti statici rispetto ad un punto di un numero qualsiasi di forze è uguale
al momento della risultante rispetto allo stesso punto”.
Consideriamo il caso più comune che si analizza nelle strutture di fabbrica che è quello di
forze complanari.
Siano F1, F2, F3, .....Fn le forze componenti (Fig. 21) di distanza d1, d2, d3, ..... dn da un
punto P e sia R = F1 + F2 + F3 + ..... Fn la risultante di distanza dr dal punto P si ha:
MF1 + MF2 + MF3 + .... + MFn = MR
Fig. 21
Graficamente la ricerca del momento, sia delle forze componenti che della loro risultante
rispetto a un punto S , viene effettuata nel modo seguente: si traccia il poligono delle forze e si
determinano quindi la risultante R e le relative proiezioni da un punto P scelto a piacere di
distanza H dalla retta R. Si costruisce il poligono funicolare; conducendo per il punto S la
parallela alla R; i lati esterni del poligono funicolare staccano su questa un segmento AB di
lunghezza y, questo moltiplicato per la distanza polare H da il momento del sistema rispetto a S
(Fig. 22).
Ciò si dimostra considerando che dalla similitudine dei triangoli O4P e ABC risulta:
RH
yr= da cui: rRyH ⋅=⋅
e quindi, essendo R la risultante ed r il suo braccio rispetto ad S, si ha: yHM ×=
F3
Fn
dn
d3
dr
d1
F1 F2
d2
R
P

23
Fig. 22
MOMENTI DI COPPIE
Dato un sistema (Fig. 23) composto da due forze parallele di intensità uguale ma di verso
opposto (coppia di forze) F1 = –F2 = |F| , il suo momento rispetto ad un qualunque punto C
(centro dei momenti) è dato, per definizione, dalla relazione:
( ) bFa-aFaF-aFM 11 ⋅==⋅⋅=
Fig. 23
Poiché tale espressione si ottiene assumendo per centro dei momenti qualunque punto del
piano si può concludere che “il momento di una coppia rispetto ad un qualsiasi punto del piano
0
1
2
3
4
F1
P
H
F2
F4
F3
F1 F2
F4
F3
y
A
B
Sr C
R
R
a
b a1 C
F
F

24
è costante ed è dato dal prodotto dell’intensità di una delle due forze per la loro distanza, detta
braccio della coppia”. Questo momento è quindi uguale al momento di una delle forze rispetto
ad uno qualunque dei punti della linea d’azione dell’altra.
Anche nel caso delle coppie è possibile individuare un senso di rotazione positivo ed uno
negativo con lo stesso criterio indicato per il momento.
L’effetto di una coppia su un piano al quale è applicata dipende esclusivamente dalla
grandezza e dal segno del suo momento. Da ciò possiamo ricavare che:
− una coppia può essere comunque trasportata nel suo piano;
− una coppia può essere trasformata in un’altra che agisca sullo stesso piano a purché
rimanga invariato il prodotto di una delle forze per il braccio della coppia;
− un sistema di coppie, qualunque sia il loro numero, il loro segno e la loro grandezza può
essere ridotto ad una sola coppia risultante il cui momento sia uguale alla somma
algebrica dei momenti delle coppie date.
“Se un solido è soggetto all’azione di due momenti uguali e di segno opposto, esso è in
equilibrio”.
CENTRO DI VETTORI PARALLELI
Sia dato un sistema di vettori paralleli F1, F2, F3, con i relativi punto di applicazione e R ne
sia la risultante (Fig. 24) si dimostra che “facendo ruotare di uno stesso angolo tutti i vettori
intorno ai loro punti di applicazione, anche la risultante ruota intorno ad un punto fisso C”.
Fig. 24
R
F3
F2
F1
F2
C
R’
F1
F’3
F’2 F’1
F’1
F’2
F’3
F3 P
P’
F2
F1
F3
F2 R
25
Questo punto di rotazione della risultante si chiama “Centro dei vettori paralleli”.
Se graficamente costruiamo il poligono funicolare dei due sistemi, l’originale e quello
ottenuto dopo la rotazione, otterremo due risultanti che si incontrano nel punto cercato C.
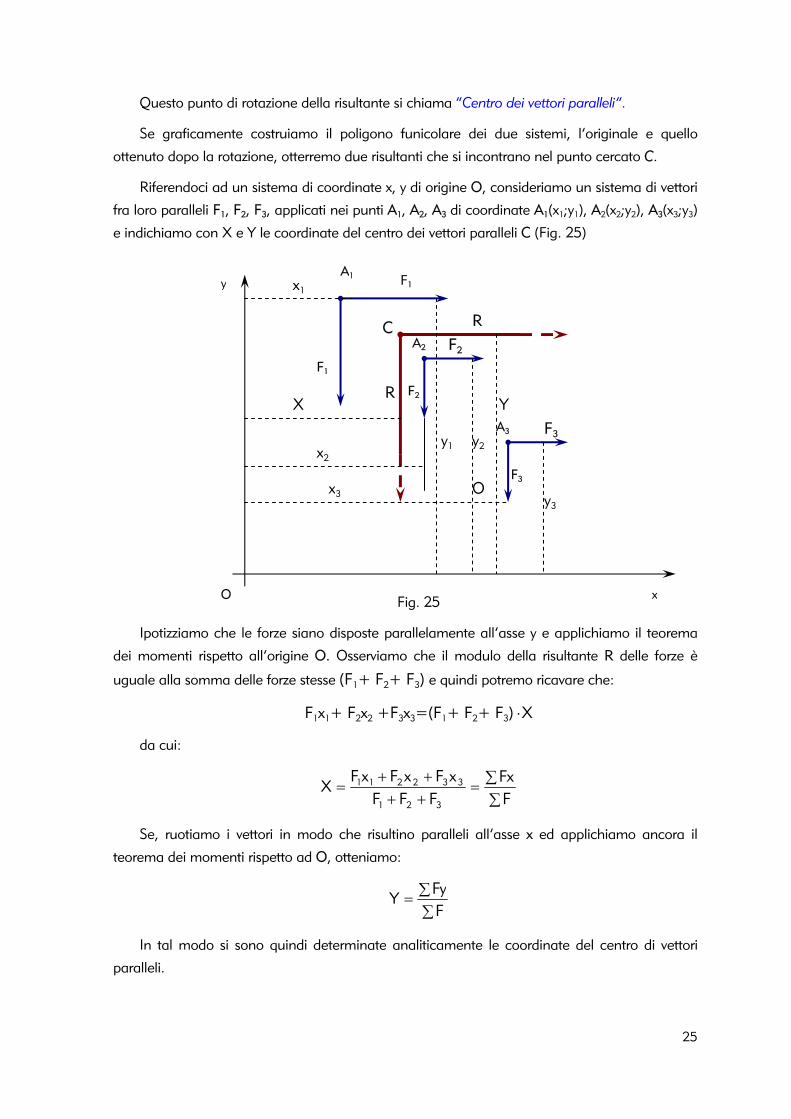
Riferendoci ad un sistema di coordinate x, y di origine O, consideriamo un sistema di vettori
fra loro paralleli F1, F2, F3, applicati nei punti A1, A2, A3 di coordinate A1(x1;y1), A2(x2;y2), A3(x3;y3)
e indichiamo con X e Y le coordinate del centro dei vettori paralleli C (Fig. 25)
Fig. 25
Ipotizziamo che le forze siano disposte parallelamente all’asse y e applichiamo il teorema
dei momenti rispetto all’origine O. Osserviamo che il modulo della risultante R delle forze è
uguale alla somma delle forze stesse (F1+ F2+ F3) e quindi potremo ricavare che:
F1x1+ F2x2 +F3x3=(F1+ F2+ F3) ⋅X
da cui:
∑∑=
++++
=FxF
FFFxFxFxF
X321
332211
Se, ruotiamo i vettori in modo che risultino paralleli all’asse x ed applichiamo ancora il
teorema dei momenti rispetto ad O, otteniamo:
∑∑=
FyF
Y
In tal modo si sono quindi determinate analiticamente le coordinate del centro di vettori
paralleli.
O
O
y
x
A1x1
y1
F2
X Y
F1
x2
y2
A2
A3
x3 y3
F2
F3
F3
F1
C
R
R

26
È possibile rilevare che se l’asse x passa per il centro C dei vettori paralleli risulta Y=0 e
quindi, per la relazione precedente, si ha:
∑ ∑ ∑ =⋅=⋅=⋅ 0F0FYyF
e quindi:
“il momento statico di un sistema di vettori paralleli rispetto ad un asse passante per il centro
dei vettori è nullo”
e, dal momento che se fosse ∑ =⋅ 0yF sarebbe, evidentemente Y=0 si può concludere
che vale anche l’inverso, e cioè:
“se il momento statico di un sistema di vettori rispetto ad un asse è nullo, l’asse passa per il
centro”.
BARICENTRO O CENTRO DI GRAVITÀ.
Se consideriamo un sistema di vettori paralleli applicati a punti dotati di massa e
consideriamo l’intensità dei vettori proporzionale alle masse dei punti di applicazione, si
definisce “Baricentro” o “Centro di gravità” il centro del sistema di vettori considerato. La ricerca
del baricentro coincide quindi con la ricerca del centro di un sistema di vettori paralleli.
Dal momento che possiamo considerare le linee, le superfici e i volumi come luoghi di
punti, questi ammettono un baricentro; per le nostre necessità considereremo solo linee e figure
omogenee, che hanno cioè in ogni loro parte la stessa densità di punti, dotati di massa uguale e
quindi come un sistema di forze parallele omogenee.
Dati questi presupposti risulta evidente che:
1. in un segmento rettilineo il baricentro si trova nel punto di mezzo (Fig. 26),
2. in una figura qualunque avente un asse di simmetria il baricentro si trova su detto asse,
3. in una figura qualunque avente un centro di simmetria il baricentro coincide con esso.
Fig. 26
l
A
B
C
l/2
l/2
27
Baricentri di figure piane irregolari
Per determinare il baricentro di una figura piana qualsiasi è necessario:
1) decomporla in figure piane semplici di cui si sa trovare il baricentro,
2) applicare ai baricentri parziali forze parallele proporzionali alle masse o, visto che si
tratta di figure omogenee, proporzionali alle aree delle figure semplici ottenute con la
scomposizione,
3) determinare il centro di questo sistema di forze parallele convenzionali con i
procedimenti esposto precedentemente.
Determinazione dei baricentri di figure piane.
Per il cerchio, l'ellisse, il quadrato e il rettangolo il baricentro coincide col centro di
simmetria. Per le figure piane più semplici descriviamo la costruzione grafica:
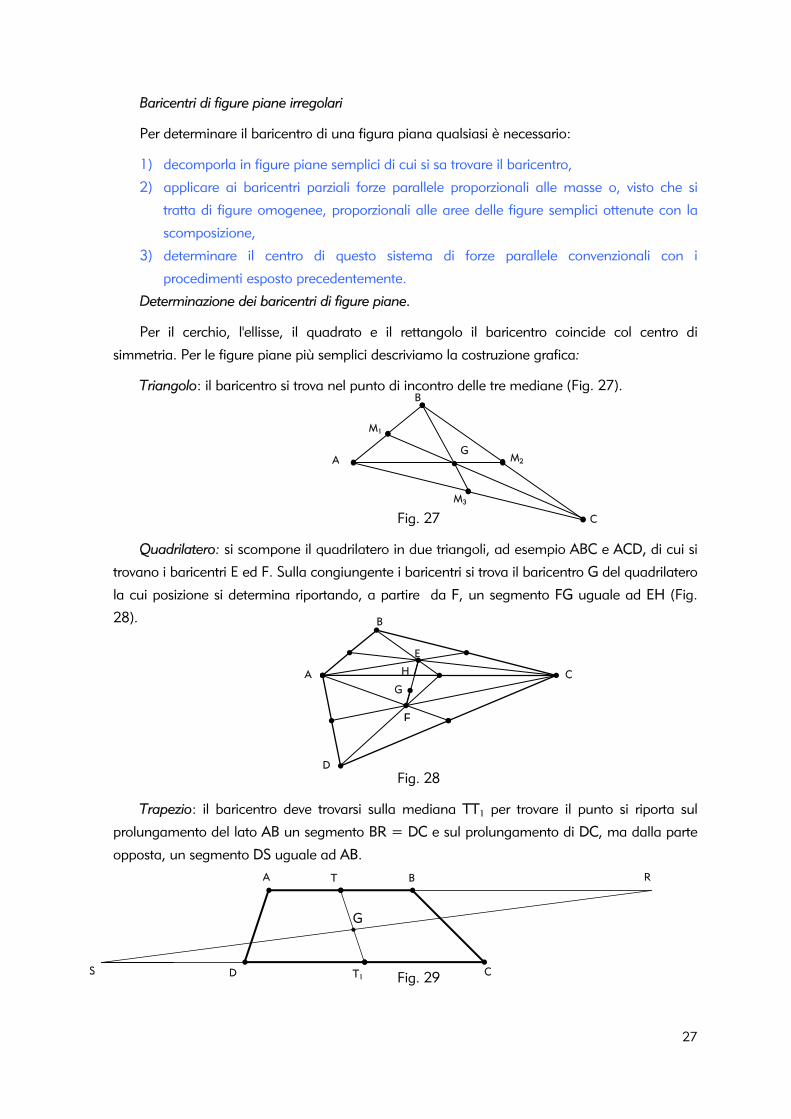
Triangolo: il baricentro si trova nel punto di incontro delle tre mediane (Fig. 27).
Fig. 27
Quadrilatero: si scompone il quadrilatero in due triangoli, ad esempio ABC e ACD, di cui si
trovano i baricentri E ed F. Sulla congiungente i baricentri si trova il baricentro G del quadrilatero
la cui posizione si determina riportando, a partire da F, un segmento FG uguale ad EH (Fig.
28).
Fig. 28
Trapezio: il baricentro deve trovarsi sulla mediana TT1 per trovare il punto si riporta sul
prolungamento del lato AB un segmento BR = DC e sul prolungamento di DC, ma dalla parte
opposta, un segmento DS uguale ad AB.
Fig. 29
B
A
D
C
E
H
G
F
A
B
C
M1
G M2
M3
A T B R
C T1 D S
• G

28
Il punto di incontro della congiungente RS e della mediana TT1 é il baricentro cercato G.
(Fig. 29).
Arco circolare: sia BAD l'arco circolare, AC l'asse di simmetria. Si conduca per A la tangente
dell'arco e si stacchi su questa un segmento AF uguale alla metà dello sviluppo dell'arco; si
unisca F con C e si conduca per D la parallela ad AC: il punto di intersezione della normale ad
AC tracciata per E e la AC è il baricentro G cercato. (Fig. 30).
Fig. 30 Fig. 31
Settore circolare: sulla tangente per A all’arco, si riporti il segmento AN’ sviluppo di metà
dell’arco MN e si unisca il punto N’ con C; diviso il raggio CN in tre parti uguali si tracci per il
punto più vicino ad N la parallela alla CA ottenendo il punto di intersezione B’ con la CN’. Il
piede della normale a CA condotta per B’ individua il baricentro G, cercato (Fig. 31).
A
B
F
E
D
•
C
G • •
•
•
• •
A
M
N’
1/3
C
G
•
•
1/3
1/3
B’ •
•
• • N
29
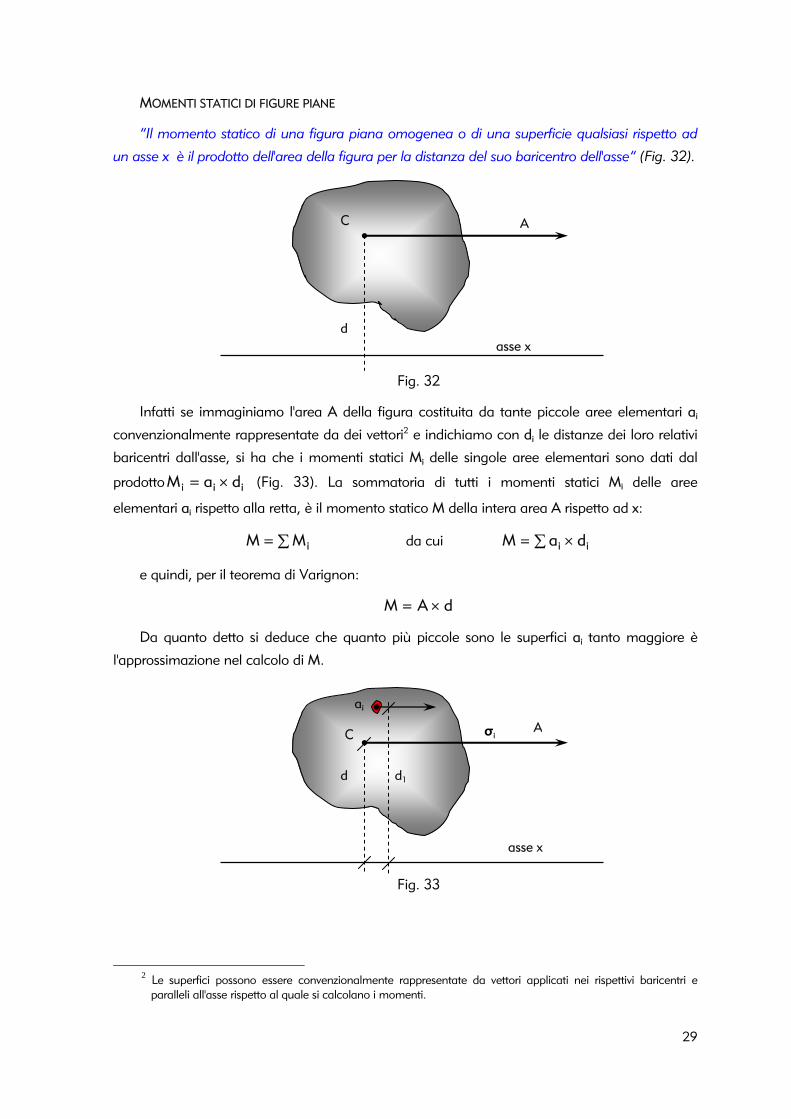
MOMENTI STATICI DI FIGURE PIANE
“Il momento statico di una figura piana omogenea o di una superficie qualsiasi rispetto ad
un asse x è il prodotto dell'area della figura per la distanza del suo baricentro dell'asse” (Fig. 32).
Fig. 32
Infatti se immaginiamo l'area A della figura costituita da tante piccole aree elementari ai
convenzionalmente rappresentate da dei vettori2 e indichiamo con di le distanze dei loro relativi
baricentri dall'asse, si ha che i momenti statici Mi delle singole aree elementari sono dati dal
prodotto iii daM ×= (Fig. 33). La sommatoria di tutti i momenti statici Mi delle aree
elementari ai rispetto alla retta, è il momento statico M della intera area A rispetto ad x:
∑= iMM da cui ∑ ×= ii daM
e quindi, per il teorema di Varignon:
dAM ×=
Da quanto detto si deduce che quanto più piccole sono le superfici ai tanto maggiore è
l'approssimazione nel calcolo di M.
Fig. 33
2 Le superfici possono essere convenzionalmente rappresentate da vettori applicati nei rispettivi baricentri e
paralleli all'asse rispetto al quale si calcolano i momenti.
C A
d asse x
C σi
d
asse x
d1
A
ai

30
Supponiamo che la figura piana presa in esame sia un rettangolo (Fig. 34) e l'asse x divida
la figura in due parti A1 e A2 diverse fra loro e con distanze dei rispettivi baricentri C1 e C2
dall'asse uguali a d1 e d2; il momento statico del rettangolo sarà M = M1 - M2 e cioè,
2211 dAdAM ⋅−⋅=
Fig. 34
Se come caso particolare risulta (Fig. 35) che A1 = A2 e d1 = d2 il momento statico è
uguale a zero.
0dAdAM 2211 =⋅−⋅=
Fig. 35
Da ciò si deduce che:
“Il momento statico di una figura piana qualsiasi rispetto ad un asse passante per il
baricentro è nullo; viceversa se il momento statico di una figura piana rispetto ad un asse è nullo,
questo asse è baricentrico”.
D
A B
E
A1 A
d2
asse x
C1
C
C2 A2
d1
D
A B
E
A1
d2
asse x C1
C
C2 A2
d1 •

31
MOMENTI DI INERZIA
“Si definisce momento di inerzia J di una forza F rispetto ad un punto o ad una retta ad essa
parallela (detta asse) il prodotto dell’intensità della forza per il quadrato della distanza della linea
d’azione della forza dal punto o dall’asse” (Fig. 36).
Fig. 36
2dFJ ⋅=
Il momento d’inerzia appartiene, con i momenti centrifughi, alla famiglia dei momenti di
secondo ordine perché la forza viene moltiplicata per una distanza al quadrato.
Più in generale è possibile definire il momento di inerzia di un sistema di grandezze F1, F2, F3,
rispetto all’asse x come la sommatoria dei prodotti delle grandezze per il quadrato delle rispettive
distanze dall’asse x di riferimento.
∑=++++= 2ii
2nn
233
222
211 xFxF......xFxFxFJ
Se rappresentiamo le grandezze con dei vettori, uguali o proporzionali alle grandezze F1, F2,
F3 e paralleli all’asse x di riferimento (Fig. 37) per questi vale tutto ciò che è stato indicato a
proposito delle forze.
Fig. 37
Per quanto sopra detto il momento d’inerzia, che si è riferito alle forze o a delle grandezze
generiche, può essere riferito anche a delle aree. In tal caso osserviamo che il momento
d’inerzia si ottiene, dal punto di vista dimensionale, come prodotto di una superficie per il
quadrato di una lunghezza (l2xl2=l4) e quindi si esprime in cm4, mm4, ecc.
d d
x
P
F F
asse x
F1
F3
F2
x1
x3 x2

32
Si è visto che per i momenti statici di un sistema di forze F1, F2, F3,…, Fn vale il teorema di
Varignon:
( ) 0321332211 YFFFaFaFaF ⋅++=⋅+⋅+⋅
ove Y0 rappresenta la distanza del centro dei vettori paralleli dall’asse x di riferimento.
Consideriamo allora i prodotti F·a2 come prodotti delle grandezze F⋅a (momenti statici) per
le loro distanze a dall’asse x. Applicando allora il teorema di Varignon ai vettori che
rappresentano i momenti statici si ha:
( ) ( ) ( ) ( ) ( ) rnn332211nnn333222111x YaF...aFaFaFaaF...aaFaaFaaFJ ⋅++⋅+⋅+⋅=⋅⋅++⋅+⋅+⋅=
Ove nn332211 aF...aFaFaF ⋅++⋅+⋅+⋅ rappresenta la grandezza del vettore
risultante Rx dei vettori momenti statici ed Yr è la sua distanza dall’asse x. Il momento di inerzia
può quindi essere espresso come il momento dei momenti statici di un insieme di grandezze. È
da notare che Y0 non coincide con Yr.
La formula precedente, tenendo conto della formula che scaturisce dal teorema di
Varignon si può scrivere anche:
( ) r0321x YYFFFJ ⋅⋅++=
Formula di trasposizione
Considerato un sistema di vettori paralleli F1, F2, F3 applicati nei punti 1, 2, 3 distanti delle
grandezze y1, y2, y3 dall’asse di riferimento x, sia C il centro del sistema di vettori e sia n un asse
parallelo ad y e passante per C. Detta d la distanza fra l’asse x e l’asse n e dette n1, n2, n3, le
distanze dei punti 1, 2, 3 dall’asse n,dalla Fig. 38 si può rilevare che:
y1= n1+d y2=n2+d n3 = d - n3
Fig. 38
Se sostituiamo questi valori nella:
233
222
211x yFyFyFJ ++=
otteniamo la:
233
222
211x )nd(F)dn(F)dn(FJ -++++=
dalla quale è possibile ricavare la:
y3
F1
F2
F3
n1
n3
n2n y1
y2d
x
1
2
3

33
x3212
332211233
222
211 J)FFF(d)nFnFnF(d2nFnFnF =++⋅++⋅+++ -
analizzando la quale si può notare che:
− i primi tre termini rappresentano il momento d’inerzia Jn rispetto all’asse n che passa
per il centro C;
− il secondo fattore del quarto termine è zero perché rappresenta il momento statico dei
vettori rispetto all’asse n;
− l’ultimo termine è il prodotto della somma dei vettori per il quadrato della distanza fra
gli assi x ed n.
potremo allora esprime tale risultato con la formula:
∑ ⋅= 2x dFJ
è possibile concludere allora enunciando il cosiddetto:
Teorema di Trasposizione: il momento d’inerzia di un sistema di vettori rispetto ad un asse
qualunque è uguale al momento d’inerzia rispetto all’asse parallelo passante per il centro,
aumentato del prodotto della somma dei vettori per il quadrato della distanza fra i due assi.
Momento d’inerzia di figure piane
Collegandoci a quanto si è detto a proposito della possibilità di passare dalla definizione di
momenti statici di vettori a quella di momenti statici di figure piane, anche per il momento
d’inerzia è possibile estendere il concetto alle figure piane. Possiamo infatti immaginare una
figura piana come composta da tante figure elementari molto piccole, o da strisce parallele di
altezza piccolissima, e di applicare nei baricentri di queste entità elementari dei vettori paralleli
di intensità uguale o proporzionale all’area delle figure o delle strisce. Facendo riferimento alla
Fig. 39 se dividiamo la superficie S in tante striscioline di superficie s1, s2, s3,…, sn che distano
rispettivamente x1, x2, x3,…, xn dall’asse x e rappresentiamo con un sistema di vettori applicati
nei baricentri i valori delle aree elementari il momento d’inerzia di tutta la superficie S rispetto
all’asse x sarà dato dalla relazione:
2nn
233
222
211x xs......xsxsxsJ ++++=
Fig. 39
h x1 x2 x3X0
b
s1 s2 s3

34
Momento d’inerzia di un rettangolo rispetto ad un asse coincidente con un lato
Sia dato un rettangolo e si voglia determinare il momento d’inerzia dello stesso rispetto ad
un asse x coincidente con la sua base. A tale scopo, si suddivide il rettangolo in tante striscioline
di uguale altezza e di area s e si applica a ciascuna di esse il relativo vettore s parallelo all’asse x
(Fig. 39). Il centro dei vettori paralleli si troverà ad una distanza X0 = h/2 rispetto all’asse x.
Se ai baricentri delle striscioline elementari applichiamo ora i vettori momenti statici:
11 xsm ⋅= 22 xsm ⋅= 33 xsm ⋅=
potremo notare dalla Fig. 40 che l’intensità di tali vettori varia con legge lineare dando
origine ad un diagramma triangolare.
Fig. 40
La risultante dei vettori momenti statici passerà quindi per il baricentro del diagramma
triangolare e quindi ad una distanza da x che può essere espressa dalla relazione:
h32
Xr =
se allora nella formula precedentemente ricavata:
( ) r0321x XXFFFJ ⋅⋅++=
sostituiamo alla somma dei vettori F1+F2+F3 l’area del rettangolo A = b · h, e a X0 e Xr i
valori corrispondenti per il caso del rettangolo con asse x coincidente con la base, otteniamo:
3x hb
31
h32
2h
hbJ ⋅=⋅⋅⋅=
Momento d’inerzia di un rettangolo rispetto ad un asse baricentrico parallelo ad un lato
Dalla precedente espressione si ricava facilmente il momento d’inerzia rispetto all’asse
passante per il baricentro e parallelo ad un lato. Dall’espressione relativa al teorema di
trasposizione:
2nx dAJJ ⋅+=
infatti possibile ricavare la:
Xr
b
m1 m2
m3
x
h

35
2xn dAJJ ⋅−=
dalla quale, sostituendo i valori relativi si ottiene:
323
n hb121
2h
bh3
bhJ ⋅=⎟
⎠⎞
⎜⎝⎛−=
MODULO DI RESISTENZA
Si indica come Modulo di resistenza Wx di una superficie piana rispetto ad un asse
baricentrico n, il rapporto fra il momento d’inerzia della superficie rispetto a quell’asse e la
distanza y dall’asse stesso delle fibre più sollecitate della sezione (e cioè i punti più distanti
dall’asse stesso):
yJ
W nn =
in particolare, considerando il rettangolo di Fig. 41, il valore del modulo di resistenza riferito
ai due assi x ed y, rispettivamente paralleli al lato minore e al lato maggiore, sarà dato dalle
relazioni:
2
3
x bh61
2h
bh121
W ==
e:
2
3
x hb61
2b
hb121
W ==
Fig. 41
x
y
h
b
36
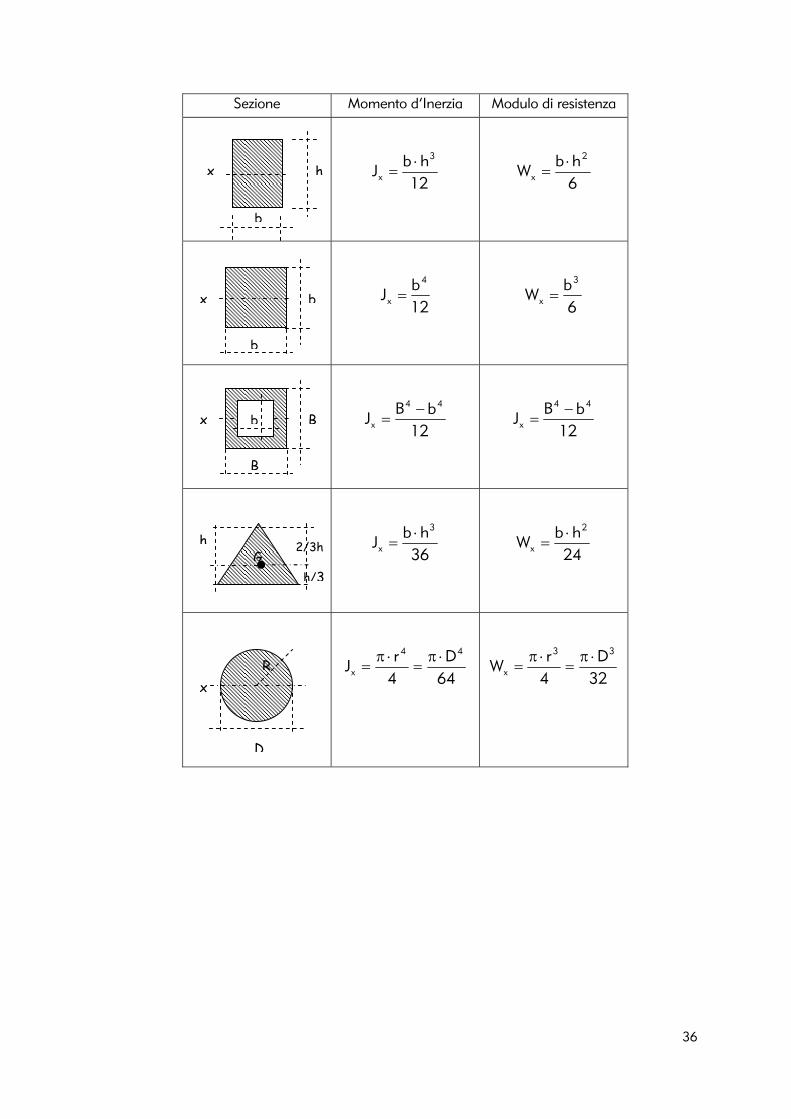
Sezione Momento d’Inerzia Modulo di resistenza
12hb
J3
x⋅
=
6hb
W2
x
⋅=
12b
J4
x =
6b
W3
x =
12bB
J44
x−
=
12bB
J44
x−
=
36hb
J3
x⋅
=
24hb
W2
x⋅
=
64D
4r
J44
x⋅π
=⋅π
=
32D
4r
W33
x⋅π
=⋅π
=
2/3h
h/3
hG
h x
b
b x
b
B x
B
b
D
x R
37
LE FASI DEL CALCOLO
Il procedimento di calcolo di una struttura può essere visto come il risultato di una serie di
fasi successive che, trattate analiticamente in modo autonomo ma con procedimenti
sequenziali, vengono alla fine a ricomporsi secondo lo schema razionale adottato dal
progettista.
Nelle pagine seguenti si affronteranno, seppur in modo succinto e semplificato, due capitoli
fondamentali della scienza delle costruzioni al fine di porre in evidenza le problematiche di base
che devono essere affrontate nella progettazione.
Nella prima parte si prenderanno in considerazione le forze esterne che agiscono sul corpo
e si studieranno le condizioni per le quali questo, considerato come un corpo rigido ideale,
raggiunge le condizioni di equilibrio. Si giungerà così a determinare il sistema completo delle
forze che agiscono sul corpo dall’esterno (sollecitazioni esterne): non solo le forze applicate, ma
anche le reazioni dei vincoli, cioè quelle forze che nascono in conseguenza dell’avere impedito i
movimenti del corpo rigido.
Nella seconda parte si prenderà in esame il comportamento dei corpi reali sollecitati dalle
forze esterne, e si analizzerà quindi cosa accade all’interno degli stessi per effetto delle forze
agenti per giungere a conclusioni che ci consentano di dimensionare elementi strutturali in
modo che siano in grado di resistere alle sollecitazioni esterne.
Infatti il corpo, sotto l’azione delle forze esterne, si deformerà in misura maggiore o minore
in relazione alla particolare situazione; il materiale si opporrà alla deformazione in quanto
nasceranno delle forze all’interno dello stesso (le sollecitazioni interne) ad ostacolare la
deformazione indotta dall’esterno. Sarà proprio in relazione alla possibilità di conoscere le
sollecitazioni interne, anzi le sollecitazioni interne riferite all’unità di superficie interessata (le
cosiddette sollecitazioni unitarie interne) che sarà possibile conoscere le condizioni di lavoro del
materiale di cui il corpo è costituito e, mettendole in relazione con le caratteristiche note del
materiale, giungere a indicare in quali condizioni lo stesso viene fatto lavorare.

38
ANALISI STATICA DEL CORPO RIGIDO
I VINCOLI
Con il termine di “elementi strutturali” si intendono quegli elementi costruttivi (travi, pilastri,
ecc.) che concorrono, nel loro insieme, a costituire una struttura. Più elementi strutturali devono
essere connessi tra loro, o con altri elementi che si suppongono fissi come il suolo mediante
“vincoli”, al fine di impedire ogni movimento, con la sola eccezione delle deformazioni elastiche.
“Si indicano col termine di vincoli le cause che limitano tutte, o solo alcune, fra le possibilità di
movimento di un elemento strutturale”.
I vincoli che collegano fra loro diverse parti di uno stesso elemento strutturale si dicono “vincoli
interni” mentre quelli che collegano gli elementi strutturali fra loro o col suolo, si dicono “vincoli
esterni”. Le forze che agiscono sul corpo vincolato generano, su ciascun vincolo, delle azioni alle
quali i vincoli stessi rispondono, in corrispondenza di ciascuna libertà di movimento impedita,
con forze uguali e contrarie alle componenti delle forze esercitate su di essi dal corpo (reazioni di
vincolo).
Riepilogando, i vincoli limitano le libertà di movimento di un corpo consentendo allo
stesso di muoversi solo nelle direzioni desiderate. Generalizzando si può definire quindi come
vincolo “ogni impedimento alla libera mobilità del corpo rigido”.
La determinazione delle “reazioni di vincolo” è indispensabile per riuscire a definire
qualitativamente e quantitativamente le “condizioni di equilibrio” del corpo e successivamente le
“sollecitazioni interne al corpo”. Queste ultime dipendono infatti da tutte le forze applicate,
reazioni dei vincoli comprese.
Nel parlare dei movimenti di un corpo rigido, o più in generale di un sistema di corpi rigidi,
ci si riferisce sempre a spostamenti infinitesimi a partire da una certa configurazione assunta
come configurazione iniziale.
CONDIZIONI DI EQUILIBRIO DI UN CORPO RIGIDO
Nello spazio i possibili movimento di un corpo possono essere studiati riferendosi alle
componenti di traslazione parallelamente agli assi cartesiani di riferimento e alle rotazioni
attorno ad assi a questi paralleli. Dato quindi un sistema di riferimento cartesiano (x;y;z) sono
possibili, nello spazio:
− tre traslazioni parallelamente ai tre assi ortogonali x, y, z,
− tre rotazioni attorno ad assi paralleli agli assi stessi.
In altri termini si può esprimere tale concetto affermando che: “Un corpo nello spazio ha sei
libertà di movimento”.
Se invece il corpo si trova in un piano le possibilità di movimento sono riconducibili a:
− due traslazioni, parallelamente ai due assi ortogonali x e y di riferimento,
− una rotazione, attorno ad assi normali al piano, paralleli all’asse z.

39
E quindi, analogamente a quanto si è detto sopra, si può affermare che:
Un corpo, nel piano, ha tre libertà di movimento.
Per impedire ogni movimento rigido del corpo (astraendo cioè dalle deformazioni elastiche)
occorre vincolarlo in modo tale da: impedire almeno tante possibilità di movimento quante
risultano essere le sue libertà di movimento, e cioè:
− sei nello spazio,
− tre nel piano.
In corrispondenza di ciascuna libertà di movimento impedita, i vincoli determinano forze, o
momenti, uguali e contrari a quelli ad essi trasmessi dal corpo rigido (reazioni di vincolo).
Classificazione dei vincoli
I vincoli possono essere classificati in base a diversi criteri ma, in primo luogo può essere
opportuno considerare una loro classificazione in base alle libertà di movimento che sono in
grado di impedire. Considerando un sistema nel piano, in base a questa classificazione i vincoli
possono essere distinti in:
− vincoli semplici o di grado 1,
− vincoli doppi o di grado 2,
− vincoli tripli o di grado 3,
a seconda che impediscano uno, due o tutti e tre i possibili movimenti di cui il sistema è
considerato capace.
VINCOLI SEMPLICI
I vincoli semplici sono capaci di impedire uno solo dei movimenti possibili. Essi hanno grado
di vincolo 1.
Esempio di questa categoria di vincoli è il carrello o appoggio semplice (Fig. 42)
Questo è un vincolo di grado 1 in quanto impedisce, al corpo rigido che vincola, solo la
traslazione nella direzione ortogonale al piano di scorrimento del carrello; consentendo invece le
traslazioni nella direzione parallela al piano di scorrimento e le rotazioni attorno all’asse della
cerniera. Il piano di scorrimento è usualmente indicato nelle schematizzazioni relative ai sistemi
piani con una linea sottostante il carrello.
Fig. 42
Y
X
φ CORPO RIGIDO
V
PIANO DI SCORRIMENTO
VINCOLO
V
A A
40
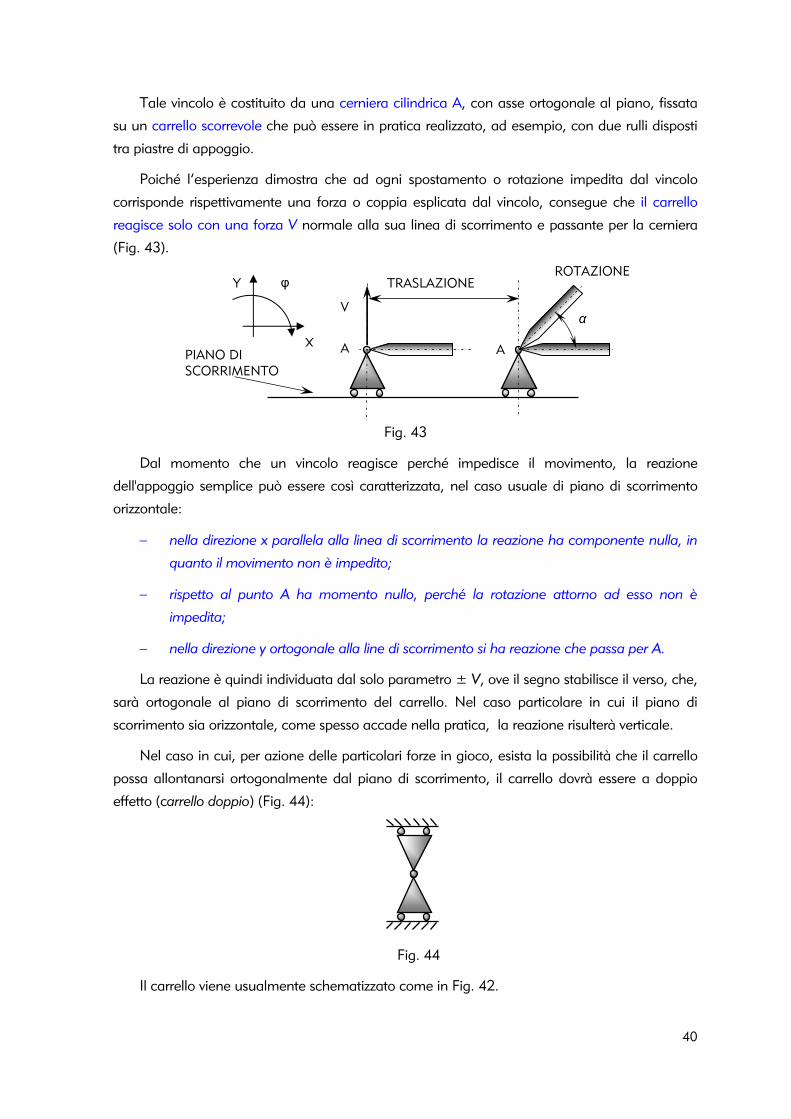
Tale vincolo è costituito da una cerniera cilindrica A, con asse ortogonale al piano, fissata
su un carrello scorrevole che può essere in pratica realizzato, ad esempio, con due rulli disposti
tra piastre di appoggio.
Poiché l’esperienza dimostra che ad ogni spostamento o rotazione impedita dal vincolo
corrisponde rispettivamente una forza o coppia esplicata dal vincolo, consegue che il carrello
reagisce solo con una forza V normale alla sua linea di scorrimento e passante per la cerniera
(Fig. 43).
Fig. 43
Dal momento che un vincolo reagisce perché impedisce il movimento, la reazione
dell'appoggio semplice può essere così caratterizzata, nel caso usuale di piano di scorrimento
orizzontale:
− nella direzione x parallela alla linea di scorrimento la reazione ha componente nulla, in
quanto il movimento non è impedito;
− rispetto al punto A ha momento nullo, perché la rotazione attorno ad esso non è
impedita;
− nella direzione y ortogonale alla line di scorrimento si ha reazione che passa per A.
La reazione è quindi individuata dal solo parametro ± V, ove il segno stabilisce il verso, che,
sarà ortogonale al piano di scorrimento del carrello. Nel caso particolare in cui il piano di
scorrimento sia orizzontale, come spesso accade nella pratica, la reazione risulterà verticale.
Nel caso in cui, per azione delle particolari forze in gioco, esista la possibilità che il carrello
possa allontanarsi ortogonalmente dal piano di scorrimento, il carrello dovrà essere a doppio
effetto (carrello doppio) (Fig. 44):
Fig. 44
Il carrello viene usualmente schematizzato come in Fig. 42.
Y
X
φ TRASLAZIONE
V α
ROTAZIONE
PIANO DI SCORRIMENTO
A A
41
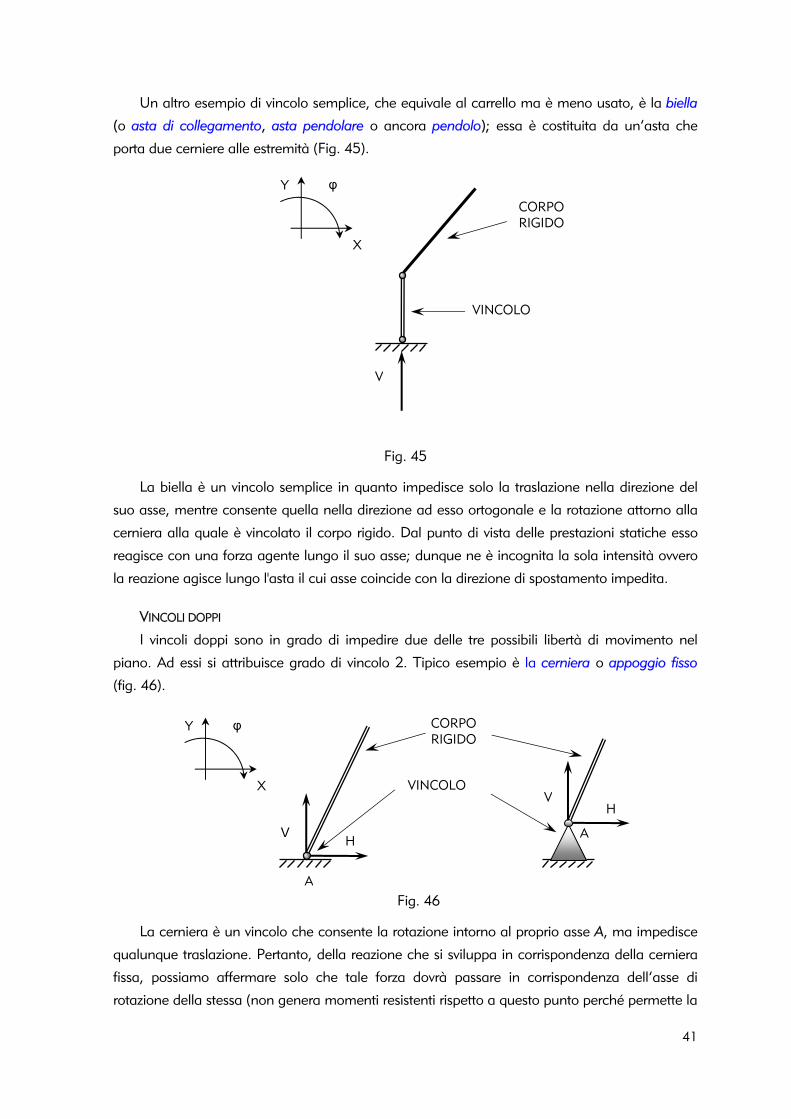
Un altro esempio di vincolo semplice, che equivale al carrello ma è meno usato, è la biella
(o asta di collegamento, asta pendolare o ancora pendolo); essa è costituita da un’asta che
porta due cerniere alle estremità (Fig. 45).
Fig. 45
La biella è un vincolo semplice in quanto impedisce solo la traslazione nella direzione del
suo asse, mentre consente quella nella direzione ad esso ortogonale e la rotazione attorno alla
cerniera alla quale è vincolato il corpo rigido. Dal punto di vista delle prestazioni statiche esso
reagisce con una forza agente lungo il suo asse; dunque ne è incognita la sola intensità ovvero
la reazione agisce lungo l'asta il cui asse coincide con la direzione di spostamento impedita.
VINCOLI DOPPI
I vincoli doppi sono in grado di impedire due delle tre possibili libertà di movimento nel
piano. Ad essi si attribuisce grado di vincolo 2. Tipico esempio è la cerniera o appoggio fisso
(fig. 46).
Fig. 46
La cerniera è un vincolo che consente la rotazione intorno al proprio asse A, ma impedisce
qualunque traslazione. Pertanto, della reazione che si sviluppa in corrispondenza della cerniera
fissa, possiamo affermare solo che tale forza dovrà passare in corrispondenza dell’asse di
rotazione della stessa (non genera momenti resistenti rispetto a questo punto perché permette la
Y
X
φ
CORPO RIGIDO
V
VINCOLO
Y
X
φ CORPO RIGIDO
V
VINCOLO
A
V
H
H
A
42
rotazione attorno all’asse della cerniera) e potrà avere come retta di azione una delle infinite
rette che passano per tale punto, determinata dalle componenti secondo due direzioni
ortogonali, ad esempio H e V. La cerniera fissa reagisce quindi con una forza che passa per il
suo centro, comunque giacente nel piano. Tale reazione può essere caratterizzata attraverso le
sue componenti H e V orientate secondo una coppia di assi cartesiani ortogonali.
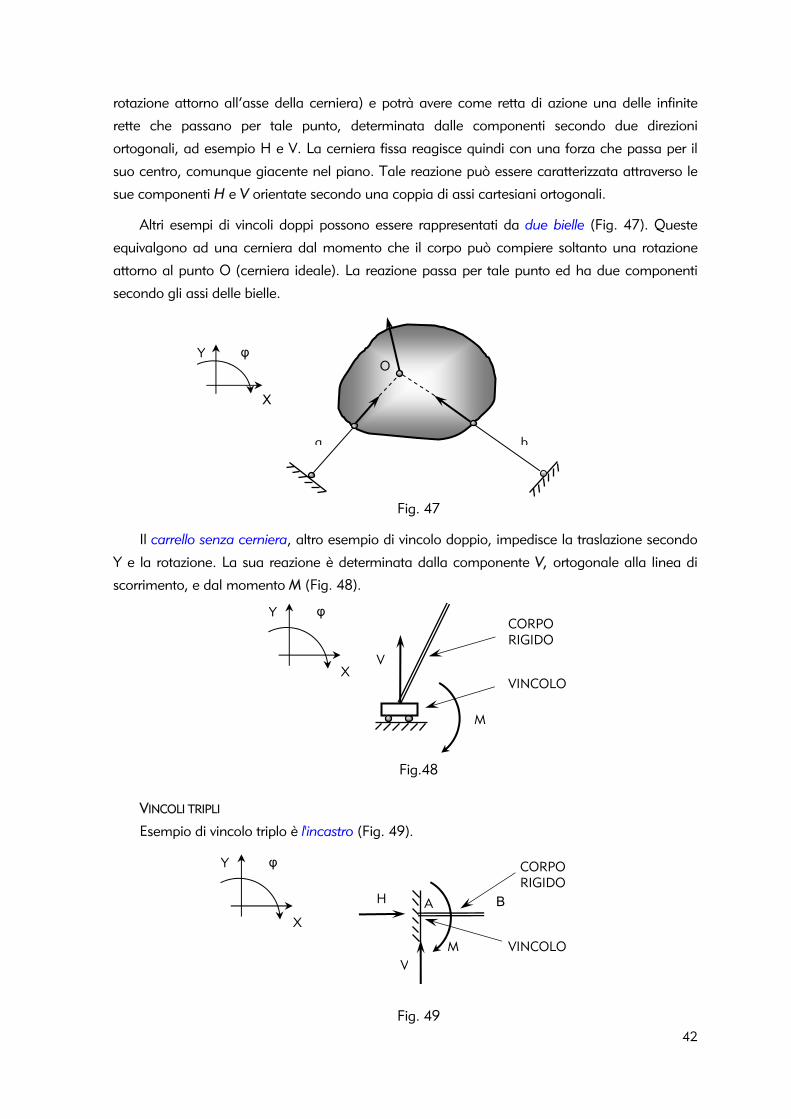
Altri esempi di vincoli doppi possono essere rappresentati da due bielle (Fig. 47). Queste
equivalgono ad una cerniera dal momento che il corpo può compiere soltanto una rotazione
attorno al punto O (cerniera ideale). La reazione passa per tale punto ed ha due componenti
secondo gli assi delle bielle.
Fig. 47
Il carrello senza cerniera, altro esempio di vincolo doppio, impedisce la traslazione secondo
Y e la rotazione. La sua reazione è determinata dalla componente V, ortogonale alla linea di
scorrimento, e dal momento M (Fig. 48).
Fig.48
VINCOLI TRIPLI
Esempio di vincolo triplo è l'incastro (Fig. 49).
Fig. 49
Y
X
φ
a
O
b
CORPO
RIGIDO V
VINCOLO
Y
X
φ
M
CORPO
RIGIDO H
VINCOLO
Y
X
φ
M V
A B

43
Questo è un vincolo di grado 3 perché impedisce tutte e tre le libertà di movimento nel
piano. Esso si realizza bloccando il corpo rigido AB nel punto A. La sua reazione equivale ad
una forza giacente nel piano; come suoi parametri possono assumersi le componenti secondo
due direzioni arbitrarie (in generale si scelgono due direzioni ortogonali) ed il momento rispetto
ad un punto del piano che di solito si fa coincidere con A.
Altro esempio di vincolo triplo è costituito da tre bielle non concorrenti in un punto (Fig. 50).
Fig. 50
Queste equivalgono infatti ad un incastro. Le prime due consentirebbero infatti una
rotazione istantanea intorno al loro punto d'incontro O. Tale rotazione è però impedita dalla
terza biella il cui asse non passa per O. La reazione è la risultante di tre forze agenti secondo gli
assi delle bielle. Nel caso dei vincoli tripli, diversamente da quanto abbiamo visto sia con quelli
semplici che con quelli doppi, non si ha alcun elemento utile a determinare la retta di azione
della reazione. Questo, comunque non costituisce un problema; infatti, come si vedrà in
seguito:
− la determinazione delle reazioni serve ai fini del calcolo delle caratteristiche di
sollecitazione degli elementi strutturali,
− nelle strutture isostatiche, così come saranno definite in seguito, potrà esistere solo
un vincolo di grado 3 e quindi se è presente un incastro non potranno essere
presenti altri vincoli,
− la determinazione delle caratteristiche di sollecitazione potrà essere condotta
considerando indifferentemente, per ciascuna sezione considerata, o le forze alla
sua destra o quelle alla sua sinistra,
− si potranno considerare allora, ai fini del calcolo solo le forze presenti dalla parte
opposta all’incastro senza quindi dover considerare le reazioni di vincolo.
Una ulteriore distinzione riguardante i vincoli è quella che considera se questi sono perfetti o
imperfetti. Potremo affermare che questo criterio considera il modo con il quale essi sono
realizzati: sarà perfetto un vincolo che impedisce i movimenti che deve impedire e consente
liberamente quei movimenti che deve consentire.
Y
X
φ
a
O
b
c
44
Nella realtà i vincoli non sono perfetti perché presentano dei cedimenti, dovuti a
deformazioni elastiche o anelastiche del materiale che li costituisce o che ne costituisce l'intorno.
I cedimenti dei vincoli, a condizione che non siano troppo grandi, sì da alterare sensibilmente la
posizione relativa degli elementi strutturali e delle forze agenti, non hanno importanza nelle
situazioni con vincoli strettamente sufficienti. In presenza di vincoli sovrabbondanti invece i
cedimenti possono avere un'influenza notevole.
E' da notare inoltre che, nella realtà, i vincoli sono imperfetti anche nel permettere
liberamente quei movimenti che devono consentire, a causa essenzialmente di resistenze
d'attrito. Di solito però queste imperfezioni sono di valutazione incerta e quindi si trascurano.
Una terza classificazione distingue i vincoli in:
− efficaci
− inefficaci
a seconda che siano pensati in maniera giusta per impedire i movimenti che devono
impedire in relazione alla disposizione delle forze agenti, oppure no.
Come si è visto è possibile classificare i vincoli in base a diversi criteri di giudizio ma è
opportuno ricordare che, in generale, si considerano vincoli ideali, che cioè non generano
resistenze di attrito e non sono soggetti a cedimenti. In certi casi, invece, è necessario
considerare anche tali eventualità ed allora parleremo di vincoli reali.
Concludendo, sulla base di quanto finora si è considerato, si può enunciare la seguente
definizione:
“i vincoli sono dei particolari dispositivi, o più semplicemente la conseguenza del modo di
disporre gli elementi strutturali rispetto ad altri considerati fissi, tali da impedire ad essi una o più
libertà di movimento”.
Infatti, in certe strutture caratterizzate da una particolare complessità il vincolo è
realizzato come uno speciale apparecchio facilmente individuabile anche ad una
osservazione sommaria: sono tali, ad esempio, le cerniere fisse in acciaio alla base di una
struttura in legno, i carrelli costituiti da piastre e rulli in acciaio su cui sono appoggiate le travi
dei ponti stradali, gli incastri a terra di una colonna di acciaio ecc. In altri casi
l’individuazione del vincolo può risultare meno immediata in quanto non è presente un
dispositivo specifico che si differenzia dall’elemento strutturale vero e proprio. Si pensi ad
esempio al collegamento di incastro fra un pilastro e una trave in calcestruzzo. In tal caso la
monoliticità della struttura non rende immediatamente evidente la presenza del vincolo. Altro
esempio può essere quello di una trave in legno di un solaio, semplicemente inserita nei muri
di un edificio. In questa circostanza pur non essendo presente alcun dispositivo particolare di
vincolo si realizzano situazioni di disposizione degli elementi strutturali tali da impedire alcuni
possibili movimenti. Ma ci si può trovare anche di fronte a situazioni di vincolo realizzate con
modalità ancora più semplici; basti pensare, ad esempio, al caso di una scala a pioli

45
appoggiata ad una parete. È in relazione alle possibilità di movimento che risulteranno
impedite che sarà possibile ascrivere ad un certo vincolo le diverse situazioni che si realizzano
nei punti ove la scala si appoggia al pavimento e alla parete: a livello del pavimento potremo
riconoscere un vincolo assimilabile a una cerniera fissa in quanto è lì che sono impedite le
traslazioni, e sulla parete è sufficiente che si realizzi un appoggio semplice. In nessuno dei
due punti è però evidente la presenza di un dispositivo di vincolo: è necessario e sufficiente,
che si verifichi un adeguato attrito dei piedi della scala sul pavimento perché si realizzi la
situazione di vincolo.

46
SISTEMI STATICAMENTE DETERMINATI O ISOSTATICI
Il numero dei vincoli di un corpo
Come si è visto un corpo in un piano ha solo tre possibilità di movimento. Ad esempio,
una trave che abbia la fibra media contenuta in un piano sul quale agiscono tutte le forze
esterne (per cui questa non tenderà ad uscire dal piano) avrà solo tre possibilità di
movimento: due traslazioni secondo assi paralleli all’asse x e all’asse y e una rotazione
intorno ad un asse normale al piano. Per impedire ogni movimento rigido di questo corpo
(non considerando cioè le deformazioni elastiche) sono necessari almeno tanti vincoli quante
sono le libertà di movimento.
Quando i vincoli sono in numero strettamente sufficiente ad impedire ogni movimento si
dice che il sistema è isostatico. Quando sono presenti dei vincoli in numero sovrabbondante,
il sistema si dice iperstatico, mentre se i vincoli sono insufficienti il sistema si dice labile. Tale
ultimo caso è molto diffuso nelle macchine ma non altrettanto nelle costruzioni.
Nei casi delle strutture più comuni, come le travi, ecc., i vincoli sono collocati in genere
nelle sezioni estreme e talvolta anche in punti intermedi. Ogni vincolo limita, allora, la
possibilità di movimento di un punto dell’asse geometrico o della sua tangente in quel punto.
Il carrello di Fig. 42, come si è visto, impedisce il movimento del punto A secondo la
direzione Y ma gli consente di muoversi nella direzione di X e consente inoltre alla tangente
in A all’asse di ruotare intorno ad A. Analogamente, si è visto che la cerniera consente solo
rotazioni della tangente in A attorno all’asse stesso, mentre l’incastro impedisce ogni
movimento. Nel caso di un carrello o di una cerniera applicati singolarmente ad un corpo,
affinché sia impedito ogni movimento del corpo stesso, occorrerà che questo sia soggetto
anche ad altri vincoli in grado di impedire i movimenti consentiti dai primi. Occorre notare
però che anche se il corpo non può effettuare i movimenti consentiti dal carrello e dalla
cerniera in modo rigido per effetto dell’ulteriore vincolo che glielo impedisce, in realtà potrà
compierli, in misura ridottissima, a seguito della sua deformazione elastica, cioè il suo asse si
deformerà in modo da rispettare soltanto quelle limitazioni(una, due o tre) che il vincolo gli
impone.
L’equilibrio tra i carichi e le reazioni
L’equilibrio fra i carichi applicati e le reazioni incognite si esprime attraverso alcune
equazioni (equazioni di equilibrio) che consentono di determinare i valori delle forze e dei
momenti che i vincoli sono in grado di generare. Se i parametri incogniti che caratterizzano le
reazioni sono in numero pari a quello delle equazioni di equilibrio il problema è possibile e
determinato, se i parametri incogniti sono in numero maggiore delle equazioni il problema è
indeterminato e, infine, se questi sono in numero minore, il sistema è impossibile.

47
Il terzo caso non interessa la scienza delle costruzioni mentre nel primo e nel secondo si
dice rispettivamente che la struttura è:
- Staticamente determinata
- Staticamente indeterminata
Ricordiamo che le componenti del movimento di un corpo nello spazio sono sei. Facendo
riferimento ad un sistema di coordinate cartesiane x, y, z, il corpo può infatti traslare
parallelamente ai tre assi di riferimento e può inoltre ruotare attorno ad assi a questi paralleli.
Questi possibili movimenti sono generati dalle forze applicate al corpo quando queste non sono
in equilibrio. Se invece le forze sono in equilibrio il corpo rimane immobile. La condizione di
equilibrio può essere espressa in modo analitico dalle seguenti equazioni:
∑Fx = 0 ∑ Fy = 0 ∑Fz = 0
∑Mx = 0 ∑My = 0 ∑Mz = 0
ove Fx, Fy, Fz sono le componenti secondo i tre assi di riferimento di tutte le forze note e
incognite ed Mx, My, Mz i loro momenti rispetto agli stessi assi.
Nel piano le equazioni di equilibrio si riducono invece a tre:
∑Fx = 0 ∑Fy = 0 ∑Mz = 0
essendo Fx e Fy le componenti secondo i due assi x ed y giacenti nel piano ed Mz i momenti
che generano rotazione attorno ad assi paralleli all’asse z uscente dal piano.
Le equazioni sopra riportate costituiscono la notazione matematica delle condizioni di
equilibrio dei corpi che, tradotta nel linguaggio corrente, sta ad indicare che affinché un corpo
sollecitato da un sistema di forze sia in equilibrio occorre che:
- La somma di tutte le forze parallele all’asse x deve essere uguale a zero (∑Fx = 0),
- La somma di tutte le forze parallele all’asse y deve essere uguale a zero (∑Fy = 0),
- La somma di tutte le forze parallele all’asse z deve essere uguale a zero (∑Fz = 0),
- La somma di tutti i momenti che inducono rotazione attorno ad assi paralleli all’asse x deve
essere uguale a zero (∑Mx = 0),
- La somma di tutti i momenti che inducono rotazione attorno ad assi paralleli all’asse y deve
essere uguale a zero (∑My = 0),
- La somma di tutti i momenti che inducono rotazione attorno ad assi paralleli all’asse z deve
essere uguale a zero (∑Mz = 0).
Il problema risulta quindi staticamente determinato se le reazioni dipendono da sei
parametri incogniti nello spazio e da tre nel piano, ovvero, dal momento che si ha per ogni
vincolo semplice un parametro incognito delle reazioni, se si hanno sei vincoli semplici nei
sistemi spaziali o tre vincoli semplici nei sistemi piani, oppure vincoli multipli equivalenti.
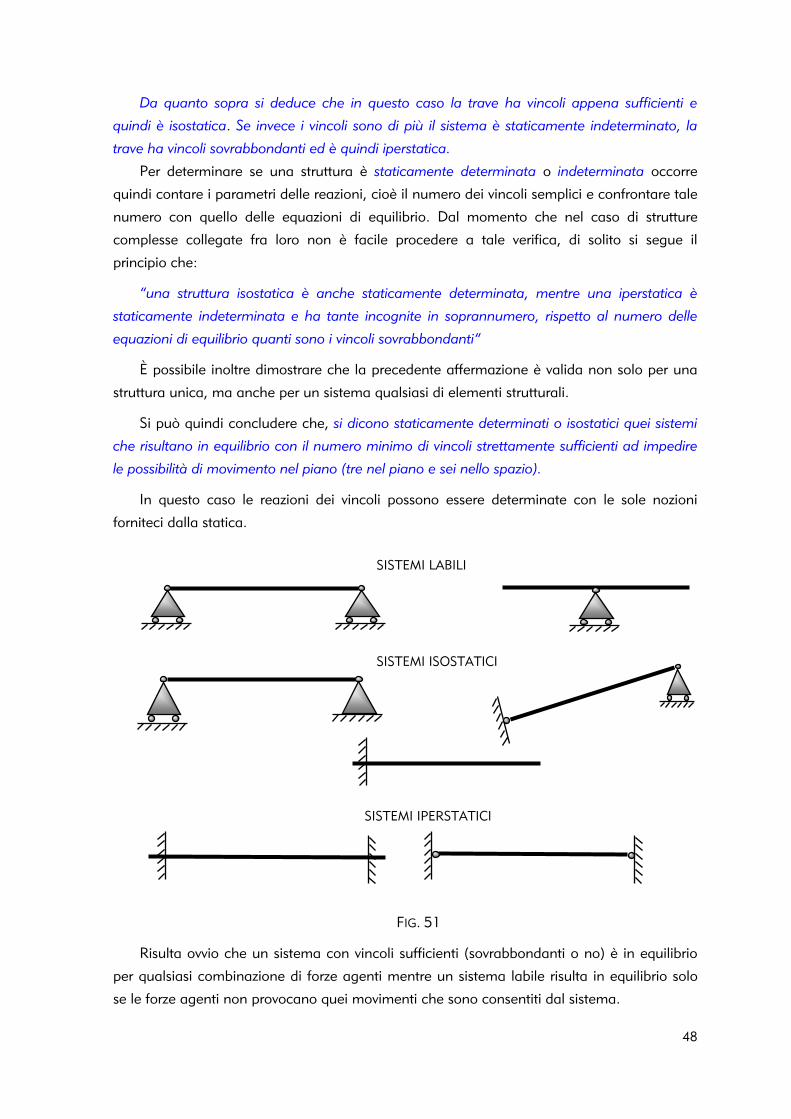
48
Da quanto sopra si deduce che in questo caso la trave ha vincoli appena sufficienti e
quindi è isostatica. Se invece i vincoli sono di più il sistema è staticamente indeterminato, la
trave ha vincoli sovrabbondanti ed è quindi iperstatica.
Per determinare se una struttura è staticamente determinata o indeterminata occorre
quindi contare i parametri delle reazioni, cioè il numero dei vincoli semplici e confrontare tale
numero con quello delle equazioni di equilibrio. Dal momento che nel caso di strutture
complesse collegate fra loro non è facile procedere a tale verifica, di solito si segue il
principio che:
“una struttura isostatica è anche staticamente determinata, mentre una iperstatica è
staticamente indeterminata e ha tante incognite in soprannumero, rispetto al numero delle
equazioni di equilibrio quanti sono i vincoli sovrabbondanti”
È possibile inoltre dimostrare che la precedente affermazione è valida non solo per una
struttura unica, ma anche per un sistema qualsiasi di elementi strutturali.
Si può quindi concludere che, si dicono staticamente determinati o isostatici quei sistemi
che risultano in equilibrio con il numero minimo di vincoli strettamente sufficienti ad impedire
le possibilità di movimento nel piano (tre nel piano e sei nello spazio).
In questo caso le reazioni dei vincoli possono essere determinate con le sole nozioni
forniteci dalla statica.
FIG. 51
Risulta ovvio che un sistema con vincoli sufficienti (sovrabbondanti o no) è in equilibrio
per qualsiasi combinazione di forze agenti mentre un sistema labile risulta in equilibrio solo
se le forze agenti non provocano quei movimenti che sono consentiti dal sistema.
SISTEMI IPERSTATICI
SISTEMI LABILI
SISTEMI ISOSTATICI

49
Si indica come grado complessivo di vincolo la somma dei singoli gradi di vincolo
ascrivibili ai diversi vincoli cui è connesso un elemento strutturale. Dal momento che nel
piano le libertà di movimento sono 3, risulteranno isostatici quegli elementi strutturali con
grado di vincolo complessivo pari a 3, labili se inferiore a 3, iperstatici se superiore a 3. La
figura 51 riporta alcuni semplici esempi di sistemi labili, isostatici e iperstatici.
LE REAZIONI DEI VINCOLI
Tutte le strutture di fabbrica, e ogni loro parte, devono risultare in equilibrio, cioè
vincolate col suolo o con altre strutture in modo da ottenere tale equilibrio.
Alle azioni che tendono a far muovere le strutture si debbono opporre delle forze
contrastanti o reazioni: queste reazioni sono ottenute, come si è visto, attraverso
l’applicazione di vincoli.
I sistemi isostatici vengono risolti con le nozioni fornite dalla statica, mentre per le
strutture iperstatiche si deve far ricorso a calcoli di ordine superiore.
CALCOLO DELLE REAZIONI DEI VINCOLI
La sostituibilità dei carichi con la risultante
Studiando una trave soggetta a più forze si è tentati di sostituire queste con la risultante per
semplificare lo studio.
Se la trave è isostatica e le reazioni sono quindi determinate dalla sola condizione di fare
equilibrio ai carichi è lecito evidentemente sostituire questi con la risultante senza che le reazioni
cambino.
Se invece si calcolano le caratteristiche di sollecitazione in una sezione o le deformazioni
nella struttura, come vedremo, la sostituzione non è più lecita perché sia le sollecitazioni che le
deformazioni dipendono dalle forze che precedono e seguono la sezione.
Lo stesso si può dire dello spostamento di una forza P lungo la sua retta d'azione.
E' lecito sostituire i carichi con la risultante, oppure spostare una forza lungo la sua retta
d'azione, solo per le travi isostatiche e limitatamente alla ricerca delle reazioni.
Il calcolo delle reazioni dei vincoli per le strutture isostatiche sottoposte ad un insieme di
forze, può essere fatto graficamente ed analiticamente. Consideriamo separatamente le due
possibilità.
Il calcolo grafico delle reazioni
Consideriamo una trave, intendendosi per trave un solido prismatico a sezione costante o
variabile gradatamente, appoggiato agli estremi A e B su due vincoli e caricata da un
sistema di forze verticali (F1, F2, F3) (Fig. 52). Per i punti A e B passano le risultanti (R1 ed R2),
delle forze applicate che agiscono sui vincoli.
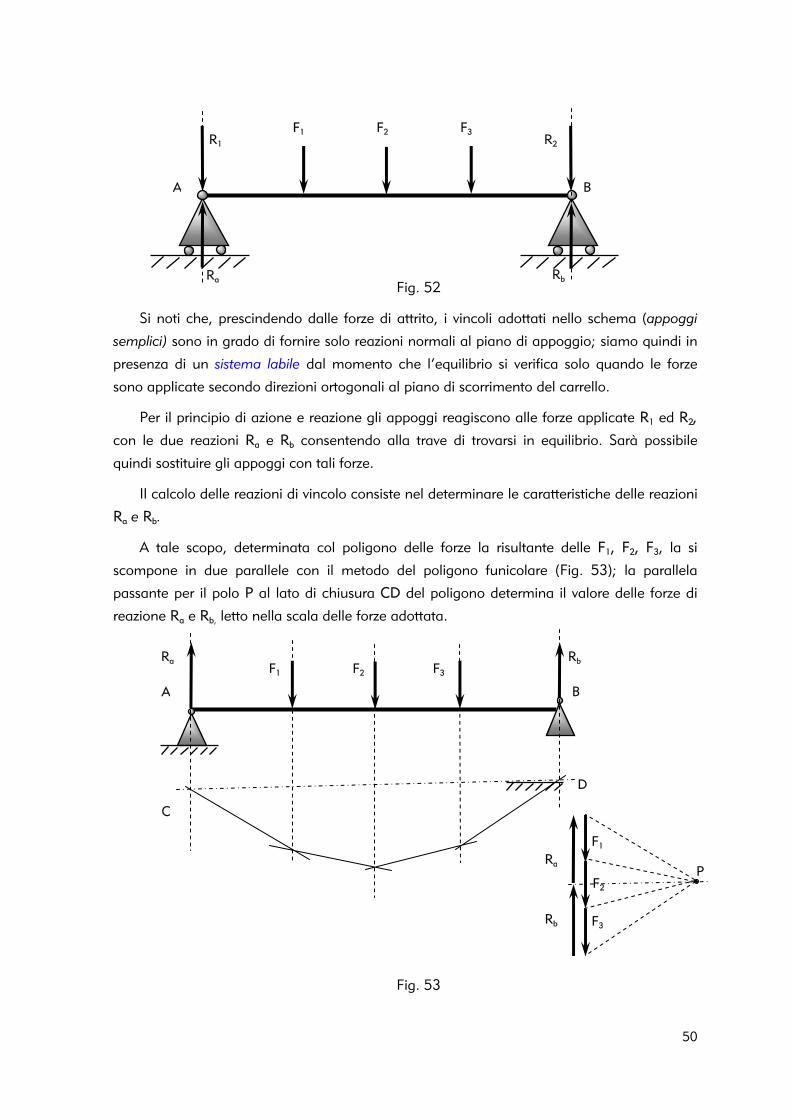
50
Fig. 52
Si noti che, prescindendo dalle forze di attrito, i vincoli adottati nello schema (appoggi
semplici) sono in grado di fornire solo reazioni normali al piano di appoggio; siamo quindi in
presenza di un sistema labile dal momento che l’equilibrio si verifica solo quando le forze
sono applicate secondo direzioni ortogonali al piano di scorrimento del carrello.
Per il principio di azione e reazione gli appoggi reagiscono alle forze applicate R1 ed R2,
con le due reazioni Ra e Rb consentendo alla trave di trovarsi in equilibrio. Sarà possibile
quindi sostituire gli appoggi con tali forze.
Il calcolo delle reazioni di vincolo consiste nel determinare le caratteristiche delle reazioni
Ra e Rb.
A tale scopo, determinata col poligono delle forze la risultante delle F1, F2, F3, la si
scompone in due parallele con il metodo del poligono funicolare (Fig. 53); la parallela
passante per il polo P al lato di chiusura CD del poligono determina il valore delle forze di
reazione Ra e Rb, letto nella scala delle forze adottata.
Fig. 53
A B
F1 F2 F3
RbRa
Ra
Rb
F1
F3
F2
P
C
D
A B
R2R1
F1 F2 F3
RbRa
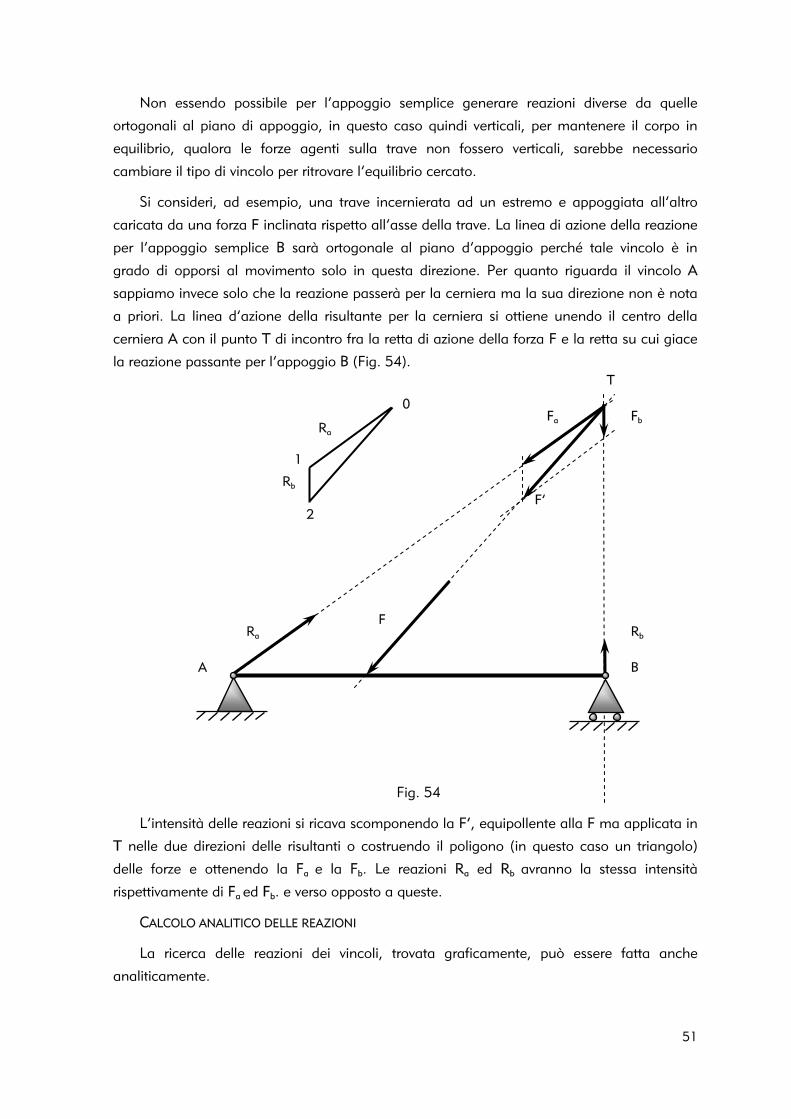
51
Non essendo possibile per l’appoggio semplice generare reazioni diverse da quelle
ortogonali al piano di appoggio, in questo caso quindi verticali, per mantenere il corpo in
equilibrio, qualora le forze agenti sulla trave non fossero verticali, sarebbe necessario
cambiare il tipo di vincolo per ritrovare l’equilibrio cercato.
Si consideri, ad esempio, una trave incernierata ad un estremo e appoggiata all’altro
caricata da una forza F inclinata rispetto all’asse della trave. La linea di azione della reazione
per l’appoggio semplice B sarà ortogonale al piano d’appoggio perché tale vincolo è in
grado di opporsi al movimento solo in questa direzione. Per quanto riguarda il vincolo A
sappiamo invece solo che la reazione passerà per la cerniera ma la sua direzione non è nota
a priori. La linea d’azione della risultante per la cerniera si ottiene unendo il centro della
cerniera A con il punto T di incontro fra la retta di azione della forza F e la retta su cui giace
la reazione passante per l’appoggio B (Fig. 54).
Fig. 54
L’intensità delle reazioni si ricava scomponendo la F’, equipollente alla F ma applicata in
T nelle due direzioni delle risultanti o costruendo il poligono (in questo caso un triangolo)
delle forze e ottenendo la Fa e la Fb. Le reazioni Ra ed Rb avranno la stessa intensità
rispettivamente di Fa ed Fb. e verso opposto a queste.
CALCOLO ANALITICO DELLE REAZIONI
La ricerca delle reazioni dei vincoli, trovata graficamente, può essere fatta anche
analiticamente.
A
T
Fb
B
F
F’
Fa
RbRa
Ra
Rb
1
2
0

52
Dalle condizioni di equilibrio di un sistema di forze sappiamo che questo si trova in
equilibrio quando sono impediti i due movimenti di traslazione ed il movimento di rotazione e
cioè quando la risultante di tutte le forze applicate al corpo è uguale a zero, ed è altresì
uguale a zero la somma di tutti i momenti rispetto ad un punto qualsiasi.
Pertanto sia data una trave caricata da un sistema di forze complanari F1, F2, F3 (Fig. 55)
a cui fanno reazione i vincoli A e B. L’insieme delle forze esterne applicate e delle reazioni
dei vincoli deve essere tale da costituire un sistema in equilibrio. Possiamo scrivere quindi in
modo sintetico che deve risultare:
∑ F = 0 ∑ Mz = 0
che sono le equazioni generali della statica. È opportuno ancora ricordare che, poiché
nel piano le forze applicate possono essere ricondotte alle due componenti parallele
rispettivamente agli assi x ed y, la generica ∑F deve essere intesa come comprensiva di tutte
le forze applicate, indipendentemente dalle loro direzioni. Più specificamente potremmo
esplicitare la ∑F con le scritture ∑Fx e ∑Fy intendendo esprimere con la prima la somma di
tutte le forze o le componenti che hanno direzione parallela all’asse x e con la seconda la
somma di tutte le forze o le componenti che hanno direzione parallela all’asse y.
Fig. 55
Impostando con queste equazioni un sistema e risolvendolo, si ottengono i valori dei
termini incogniti, cioè delle reazioni dei vincoli Ra ed Rb. Infatti, affinché si abbia equilibrio nel
sistema di forze applicate occorre che siano soddisfatte contemporaneamente le equazioni:
∑Fx = 0
∑Fy = 0
è chiaro che, per l’esempio citato, la ∑Fx = 0 è soddisfatta perché non esistono forze
che abbiano componente secondo l’asse x.
A B
F1 F2 F3
RbRa
a1 b1
a2
b3
l
b2

53
Se invece esplicitiamo la ∑Fy = 0 , si nota che la somma di tutte le forze parallele
all’asse y è data dalla:
0RRFFF ba321 =−−++
equazione con due incognite che non ci permette di ricavare i valori di Ra ed Rb.
Tali valori si possono invece ricavare ricorrendo alla ∑Mz = 0, ponendo cioè la
condizione di equilibrio dei momenti di tutte le forze rispetto ad un punto, se si ha
l’accortezza di scegliere questo punto in modo tale che il momento di una reazione incognita
si annulli. Questo si ottiene assumendo come polo dei momenti il punto A o il punto B degli
appoggi in modo da annullare il momento dovuto alla reazione passante per A o per B.
Considerando sempre la Fig. 55 e prendendo, ad esempio, come centro dei momenti il
punto B e considerando con segno positivo i momenti che producono una rotazione oraria e
negativo quelli che producono una rotazione opposta si avrà per la ∑ Mz=0:
0bFbFbFlR 332211a =⋅−⋅−⋅−⋅
Prendendo invece come centro il punto A, si avrà, sempre per la ∑Mz= 0:
0lRaFaFaF b332211 =⋅−⋅+⋅+⋅
Da queste si ricava:
lbFbFbF
R 332211a
⋅+⋅+⋅=
laFaFaF
R 332211b
⋅+⋅+⋅=
Conoscendo ora anche le reazioni Ra e Rb al sistema applicato, risulta intuitivo che,
perché la trave sia in equilibrio sarà:
∑Fy = 0
e cioè:
-Ra - Rb + F1 + F2 + F3 = 0
Se avessimo voluto utilizzare questa equazione sarebbe stato sufficiente sostituire in
questa il valore di una delle reazione Ra o Rb ricavato da una delle equazioni precedenti per
ricavare il valore dell’altra reazione.
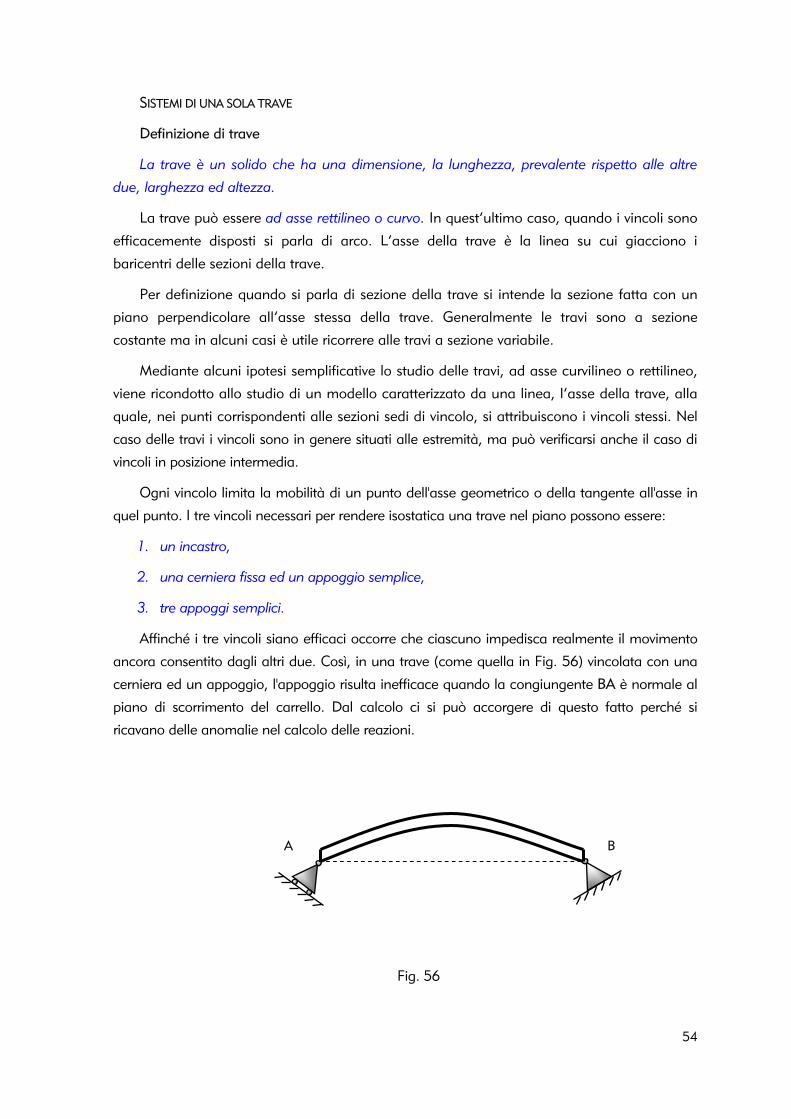
54
SISTEMI DI UNA SOLA TRAVE
Definizione di trave
La trave è un solido che ha una dimensione, la lunghezza, prevalente rispetto alle altre
due, larghezza ed altezza.
La trave può essere ad asse rettilineo o curvo. In quest’ultimo caso, quando i vincoli sono
efficacemente disposti si parla di arco. L’asse della trave è la linea su cui giacciono i
baricentri delle sezioni della trave.
Per definizione quando si parla di sezione della trave si intende la sezione fatta con un
piano perpendicolare all’asse stessa della trave. Generalmente le travi sono a sezione
costante ma in alcuni casi è utile ricorrere alle travi a sezione variabile.
Mediante alcuni ipotesi semplificative lo studio delle travi, ad asse curvilineo o rettilineo,
viene ricondotto allo studio di un modello caratterizzato da una linea, l’asse della trave, alla
quale, nei punti corrispondenti alle sezioni sedi di vincolo, si attribuiscono i vincoli stessi. Nel
caso delle travi i vincoli sono in genere situati alle estremità, ma può verificarsi anche il caso di
vincoli in posizione intermedia.
Ogni vincolo limita la mobilità di un punto dell'asse geometrico o della tangente all'asse in
quel punto. I tre vincoli necessari per rendere isostatica una trave nel piano possono essere:
1. un incastro,
2. una cerniera fissa ed un appoggio semplice,
3. tre appoggi semplici.
Affinché i tre vincoli siano efficaci occorre che ciascuno impedisca realmente il movimento
ancora consentito dagli altri due. Così, in una trave (come quella in Fig. 56) vincolata con una
cerniera ed un appoggio, l'appoggio risulta inefficace quando la congiungente BA è normale al
piano di scorrimento del carrello. Dal calcolo ci si può accorgere di questo fatto perché si
ricavano delle anomalie nel calcolo delle reazioni.
Fig. 56
A B
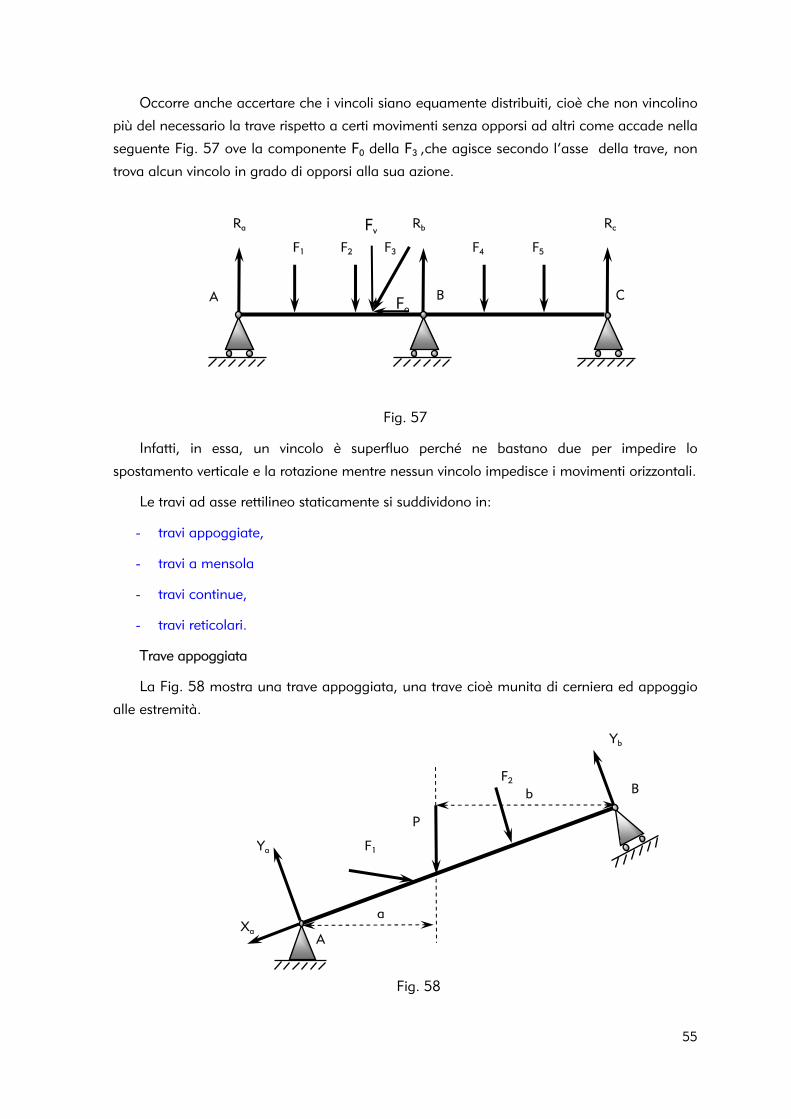
55
Occorre anche accertare che i vincoli siano equamente distribuiti, cioè che non vincolino
più del necessario la trave rispetto a certi movimenti senza opporsi ad altri come accade nella
seguente Fig. 57 ove la componente F0 della F3 ,che agisce secondo l’asse della trave, non
trova alcun vincolo in grado di opporsi alla sua azione.
Fig. 57
Infatti, in essa, un vincolo è superfluo perché ne bastano due per impedire lo
spostamento verticale e la rotazione mentre nessun vincolo impedisce i movimenti orizzontali.
Le travi ad asse rettilineo staticamente si suddividono in:
- travi appoggiate,
- travi a mensola
- travi continue,
- travi reticolari.
Trave appoggiata
La Fig. 58 mostra una trave appoggiata, una trave cioè munita di cerniera ed appoggio
alle estremità.
Fig. 58
A B
F1
Rb
F3
RcRa
F2 F4
C
F5
Fo
Fv
Xa
F1
b B
Yb
F2
a
P
A
Ya

56
Le sue reazioni dipendono da tre parametri che sono:
1. Nell'appoggio fisso le componenti Ya normale all'asse della trave e Xa secondo l'asse.
2. Nell'appoggio scorrevole la reazione Yb normale alla direzione di scorrimento che di
solito è parallela all'asse della trave.
Le equazioni di equilibrio fra i carichi e le reazioni sono:
ΣFx = 0 ΣFy = 0 ΣMz = 0
essendo x e y, rispettivamente le componenti secondo l'asse e la normale all'asse della trave
ed Mz i momenti rispetto a un punto qualunque del piano.
Se la trave è orizzontale (Fig.59) x e y sono le componenti rispettivamente orizzontali e
verticali.
La reazione dell'appoggio B è sempre verticale.
Se inoltre i carichi sono verticali, la ΣFx = 0 ci dice che anche la componente secondo l’asse
x dell'appoggio fisso è nulla, ossia che è verticale anche la reazione di questo appoggio. I
parametri incogniti si riducono in tal caso a due Ra e Rb, ma anche le equazioni si riducono a
due:
ΣFy = 0 e ΣMz= 0
Fig. 59
perché la ΣFx = 0 è stata utilizzata per dedurre che la componente secondo l’asse x è
nulla.
Le ΣFy = 0 e ΣMz = 0 contengono entrambe le incognite Ra e Rb, ma è facile ottenere
invece due equazioni contenenti ciascuna una sola incognita.
Infatti ΣMz = 0 si può scrivere utilmente una volta sola, perché se si scrivesse una seconda
volta, calcolando i momenti rispetto ad un secondo punto, l'equazione ottenuta sarebbe una
A B
P
RbRa
a
l
b

57
conseguenza della prima e della ΣFy = 0, cioè una combinazione lineare di queste e perciò
inefficace.
Ma le due ΣMz = 0 diventano entrambe efficaci se si rinuncia alla ΣFy = 0. Basta quindi
scrivere due volte l'equazione dei momenti rispetto ai punti B e A per eliminare ogni volta
un'incognita.
00RbPlR ba =⋅+⋅−⋅ 00RaPlR ab =⋅+⋅+⋅−
da cui:
lbP
Ra⋅
= laP
Rb
⋅=
Non sempre si può prevedere il verso di un parametro incognito e quindi il segno da
attribuire al termine che lo contiene nelle equazioni.
Conviene perciò assumere per ciascun parametro un senso positivo di riferimento e supporre
che esso abbia quel senso. Se poi nella risoluzione risulta un valore positivo il parametro ha il
senso supposto; se risulta negativo, ha il senso contrario.
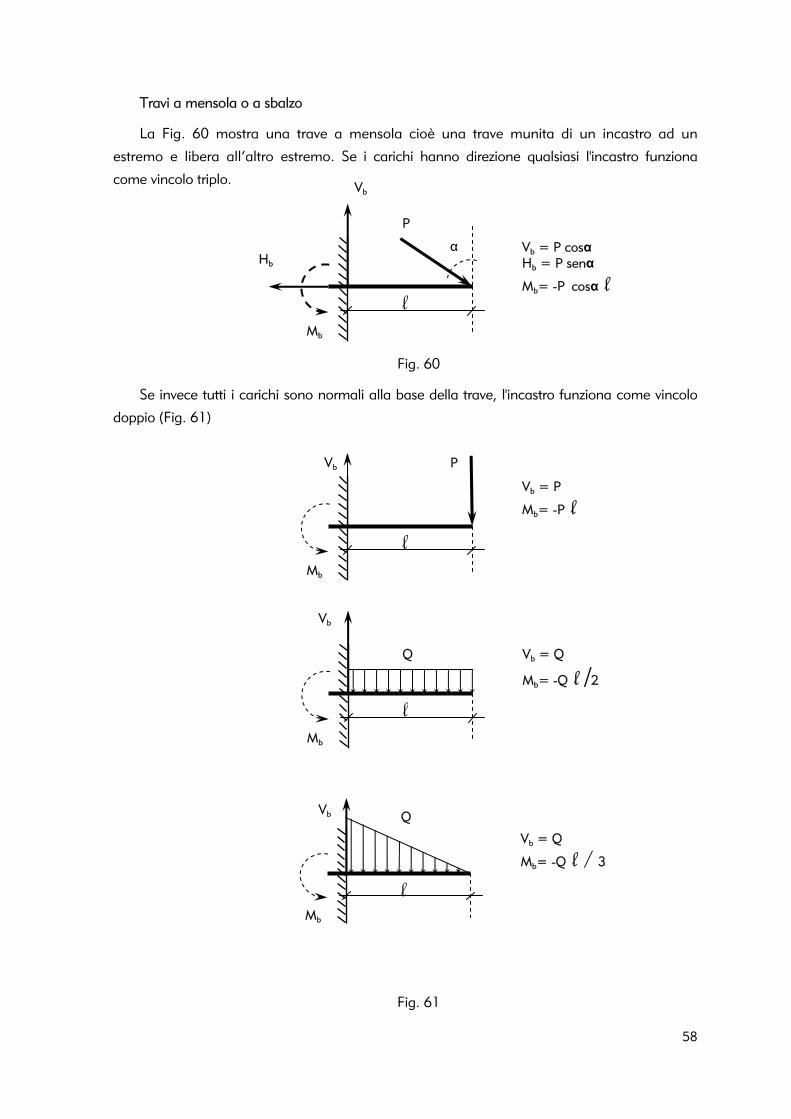
58
Travi a mensola o a sbalzo
La Fig. 60 mostra una trave a mensola cioè una trave munita di un incastro ad un
estremo e libera all’altro estremo. Se i carichi hanno direzione qualsiasi l'incastro funziona
come vincolo triplo.
Fig. 60
Se invece tutti i carichi sono normali alla base della trave, l'incastro funziona come vincolo
doppio (Fig. 61)
Fig. 61
α
P
l
Vb
Hb
Mb
Vb = P cosα Hb = P senα
Mb= -P cosα l
P
l Mb
Vb = P
Mb= -P l
Q
l
Vb
Mb
Vb = Q
Mb= -Q l /2
Q
l Mb
Vb = Q
Mb= -Q l / 3
Vb
Vb
59
SISTEMI PIANI DI PIÙ TRAVI
Vincoli esterni e vincoli interni
Nei sistemi di più travi (o corpi) si hanno vincoli esterni, che collegano alcune delle travi col
suolo, e vincoli interni che collegano le travi fra loro.
I vincoli esterni possono essere incastri, cerniere, appoggi semplici; quelli interni sono di
solito cerniere e talvolta bielle.
Non conviene considerare l'incastro fra i vincoli interni, perché due travi collegate con un
incastro costituiscono una trave unica.
I vincoli esterni devono essere almeno di grado tre altrimenti il sistema non è fissato al
suolo. Bastano tre quando le varie parti sono sufficientemente vincolate fra loro, altrimenti ne
occorrono più di tre.
Spesso un sistema isostatico resta tale se si sostituiscono dei vincoli interni con altrettanti
esterni, ma non è lecita la sostituzione inversa se i vincoli esterni sono soltanto tre.
Il computo dei vincoli
Ognuna delle travi del sistema ha tre libertà di movimento, se le travi sono n, si hanno 3n
libertà che bisogna impedire con almeno altrettanti vincoli.
Per computare i vincoli interni si ragiona così: una cerniera interna collegante due travi,
toglie a ciascuna due libertà di movimento, ma essa stessa ne conserva due, quindi sopprime
due libertà, ed è perciò un vincolo doppio, come le cerniere esterne. Se dunque si indicano con
“i” gli incastri, con “c” le cerniere colleganti ciascuna due travi (una delle quali può essere il
suolo, nel qual caso la cerniera è esterna), e con “a” gli appoggi semplici il sistema è isostatico
se risulta
3i + 2c + a = 3n
Se il primo membro risulta maggiore del secondo, il sistema è iperstatico: se risulta minore è
labile.
Si deve poi accertare che i vincoli siano efficaci, ossia che ciascuno impedisca realmente il
movimento consentito dai rimanenti.
Infine si deve accertare che i vincoli siano equamente distribuiti, cioè che una parte del
sistema non risulti troppo vincolata a scapito di un'altra che risulterebbe labile.
OSSERVAZIONI
Nella ricerca delle soluzioni in un sistema isostatico si possono sostituire alcuni carichi con la
loro risultante, ma ciò può essere fatto soltanto per le forze applicate a ogni singola trave del
sistema, altrimenti nelle equazioni ausiliarie non figurerebbero le forze giuste.
60
LE TENSIONI INTERNE
LE SEI IPOTESI FONDAMENTALI
Lo studio della teoria della resistenza dei materiali si basa su sei ipotesi fondamentali che
prevedono le condizioni che rendono valide le considerazioni successive:
1. Il corpo deve essere isotropo; per cui si considera la sua elasticità uguale in tutte le direzioni
e con lo stesso valore in ogni suo punto.
2. Il corpo deve ammettere un piano di simmetria nel quale agiscono tutte le forze esterne
applicate.
3. Le tensioni interne e le deformazioni sono regolate dalla Legge della Proporzionalità (legge
di Hooke).
4. Le sezioni rette del solido, rettilineo o curvilineo, si considerano piane e normali all’asse del
solido durante e dopo la deformazione quando questo è sottoposto all’azione di un sistema
di forze in equilibrio (Ipotesi di Bernoulli).
5. L’applicazione dei carichi deve avvenire in maniera statica, cioè gradatamente da un valore
zero, fino al valore massimo.
6. Quando su un corpo agiscono contemporaneamente più forze, l’effetto che esse producono
sul corpo (sollecitazioni unitarie, deformazioni, reazioni di vincolo) è uguale alla sommatoria
degli effetti che ciascuna di dette forze produrrebbe sul corpo, qualora agisse da sola
(Principio della sovrapposizione degli effetti).
DEFORMAZIONI
Legge di Hooke
Nello studio delle forze applicate ad un corpo si è supposto il corpo rigido, cioè
indeformabile.
In realtà i corpi in natura non sono rigidi, ma deformabili. Se vengono infatti sollecitati da
un sistema di forze reagiscono in vario modo deformandosi.
Semplificando si può spiegare il fenomeno della deformazione ricordando che i corpi sono
composti da molecole fra le quali si esercitano forze di coesione che mantengono queste
particelle ad una certa distanza fra loro. Tale distanza può subire variazioni sotto l’azione di
forze esterne applicate per cui si produce la deformazione del corpo. La deformazione, indicata
con ε si dice elastica se scompare una volta che vengono tolte le sollecitazioni esterne,
permanente se rimane anche dopo.
Le forze esterne possono essere concentrate (quando agiscono su una porzione ristretta del
corpo, teoricamente un punto) o ripartite (quando agiscono su una porzione ampia del corpo).
Nel caso delle forze ripartite risulta di notevole importanza la determinazione delle forze che

61
sono applicate sull’unità di superficie del corpo. Queste ultime vengono dette sollecitazioni
unitarie (σ) e, se le forze esterne sono uniformemente ripartite, il loro valore si ottiene dividendo
l’intensità totale della forza ripartita (N) per la superficie (A) su cui questa è applicata.
AN
=σ
Le σ si misurano di solito in N/mm2 o in daN/cm2 .
L’esperienza dimostra che aumentando il valore delle forze esterne aumentano anche le
deformazioni. Se in un corpo soggetto a sollecitazione σ gradatamente crescente si misura la
deformazione ε che si verifica, è possibile notare che questa varia dapprima in modo
proporzionale alla sollecitazione e poi, oltre un certo limite, chiamato Limite di proporzionalità,
cresce più rapidamente della sollecitazione. Al di sotto del limite di proporzionalità la
deformazione è quindi proporzionale alla forza agente e questo fatto è stato enunciato da
Robert Hooke nel 1697 attraverso una legge indicata come Legge di Hooke che verrà
esplicitata in seguito.
Si può notare ancora che oltre tale limite, anche al cessare dell’azione delle forze, il corpo
non riprende la forma originaria. Si dice allora che il corpo si è deformato in maniera
permanente. Continuando nell’azione delle forze, si arriva alla rottura del corpo stesso.
La tendenza delle molecole a mantenere le loro posizioni primitive e le loro distanze
reciproche, quando vengono sottoposte a delle forze esterne, è dovuta, come si è detto, alle
forze di legame interne, o tensioni interne o resistenze.
Si consideri un corpo prismatico, di sezione costante, di lunghezza iniziale l0 e soggetto
soltanto a due sistemi di forze esterne uguali e contrarie applicate normalmente alle sue sezioni
estreme e aventi la risultante passante per il baricentro della sezione. In tal caso lo sforzo
assiale è costante in tutte le sezioni ed è uguale alla risultante N di ciascun sistema di forze.
Indicando con x l’asse del corpo e con A l’area di ogni sezione ortogonale ad x si può
osservare che in ogni sezione si generano delle sollecitazioni unitarie normali alla sezione stessa
(e quindi dirette secondo l’asse x) il cui valore, come si è detto, viene indicato con σx ed è dato
dal rapporto:
AN
x =σ
E’ evidente che lo sforzo N provoca una variazione della lunghezza del solido che assume
una nuova lunghezza l .
Si può definire allora la quantità εx ,detta dilatazione o contrazione (e quindi più
genericamente deformazione) unitaria o percentuale lineare nella direzione x, che è ottenuta
come rapporto fra due lunghezze e quindi è un numero puro, indipendente cioè dall’unita di
misura delle l.

62
0
0x l
ll−=ε
Se non si oltrepassa il limite di proporzionalità, secondo la Legge di Hooke, la
deformazione è proporzionale alla sollecitazione che la provoca:
Ex
x
σε =
La precedente relazione ci permette di ricavare la:
xx Eεσ =
che esprime la cosiddetta Legge di Hooke o Legge di Proporzionalità.
Oggi è stato dimostrato che questa relazione è in realtà valida solo per alcuni metalli (ferro
e acciai) ma nonostante ciò la Legge di Hooke è una legge fondamentale della scienza delle
costruzioni per le semplificazioni che introduce.
Il fattore E di proporzionalità fra σx ed εx è chiamato Modulo di elasticità normale o Modulo
di Young ed è tipico di ogni materiale. Il modulo di elasticità è definito, per la relazione
precedente dalla:
x
xEεσ
=
per cui, essendo ε un numero puro, ha la stessa dimensione di σ.
E rappresenta la sollecitazione unitaria occorrente per determinare in un corpo elastico la
deformazione unitaria in senso parallelo alla sollecitazione.
Coefficienti che definiscono le proprietà di un corpo elastico
Lo studio delle deformazioni, e quindi delle sollecitazioni interne di un corpo continuo
elastico, è molto complesso e per tale motivo si deve procedere a delle semplificazioni. A tale
scopo si introducono i concetti di Perfetta elasticità, di Omogeneità e di Isotropia che consento
lo studio delle deformazioni considerando solo due costanti elastiche delle 21 che altrimenti
sarebbero necessarie. Tali costanti sono:
- Il modulo di Young, o modulo di elasticità normale E (sopra descritto),
- Il coefficiente di Poisson o di contrazione trasversale 1/m
Si è visto che un solido sollecitato assialmente subisce delle deformazioni longitudinali εx
ma contemporaneamente a queste si manifestano anche delle deformazioni trasversali εy e εz
uguali fra loro, di segno contrario alla εx ma di entità minore.
Queste deformazioni sono legate alla deformazione longitudinale dalla relazione:
mx
zy
εεε −==

63
nella quale il termine 1/m = v è detto Coefficiente di deformazione trasversale o
Coefficiente di Poisson.
Carichi di rottura e carichi di sicurezza
Per ciascuno dei materiali da costruzione ai quali sono affidate funzioni di resistenza a
sollecitazioni provenienti dall’esterno, devono essere individuati valori di resistenza caratteristici
ai quali far riferimento in fase di progettazione. A tale scopo vengono realizzati, con
apparecchiature e procedure opportune, vari tipi di prove sui materiali per valutare il grado di
resistenza e le qualità tipiche di ognuno di essi.
A scopo didattico si usa spesso far riferimento alla prova eseguita su una sbarretta di ferro
omogeneo soggetta a sforzi di trazione gradualmente crescenti, perché da essa si ricavano
risultati particolarmente efficaci per illustrare il comportamento dei materiali sottoposti a
sollecitazioni dall’esterno.
La prova è condotta con un’apparecchiatura che consente di seguire l’andamento del
fenomeno facendo riferimento ad un sistema di coordinate cartesiane (Fig. 62) nel quale sono
riportate sull’asse delle ordinate le sollecitazioni σx (N/mm2) applicate alla sbarretta di prova, e
sull’asse delle ascisse le deformazioni (allungamenti) εx (%) registrate
Dall’esame del diagramma ricavato a seguito della prova è possibile rilevare come,
partendo dall’origine, il diagramma si mantenga per un primo tratto rettilineo fino al punto P1
punto che viene detto limite di proporzionalità o di elasticità. Tale tratto rettilineo corrisponde
alla fase delle deformazioni elastiche proporzionali alle sollecitazioni. In tale tratto è valida la
legge di Hooke sopra ricordata.
Dal punto P1 al punto P2 il diagramma diviene una curva e pur mantenendosi il fenomeno
sempre nel campo delle deformazioni elastiche, gli allungamenti e gli sforzi non sono più
proporzionali. In corrispondenza di P2 termina la fase elastica; al crescere del carico si entra
nella terza fase o fase dello snervamento che mette in evidenza anomalie nel regime delle
deformazioni provocate da cedimenti del materiale. Per tale fase il diagramma, nel tratto P2 P3,
mette in evidenza l’alternanza di bruschi cedimenti e riprese di resistenza del materiale.
Fig. 62
O
σx
P1
P2 P3
Pmax
Pr
εx
• • •
••

64
Al crescere ancora del carico, nel tratto P3 Pmax si entra in una quarta fase in cui il materiale
subisce notevoli allungamenti, opponendo debole resistenza alla forza applicata (fase delle
grandi deformazioni permanenti o fase plastica); nel punto Pmax si ha la resistenza massima del
materiale.
Da qui in poi si ha un tratto discendente che indica il formarsi di allungamenti localizzati
accompagnati da contrazioni della sezione trasversale del provino fino a giungere alla rottura
improvvisa in corrispondenza del punto Pr.
In realtà i punti sopra indicati non sono punti geometrici veri e propri ma zone più o meno
ampie entro le quali cadono gli inizi delle fasi successive.
Se indichiamo con A l’area della sezione traversale del provino, si definisce come carico
unitario di rottura σr il rapporto fra il carico di rottura Pr e l’area della sezione primitiva:
APr
r =σ
Evidentemente nelle costruzioni, per assicurarne la stabilità, è necessario che il materiale
non venga sollecitato con carichi unitari prossimi al carico di rottura ed anzi occorre mantenersi
molto al di sotto del σr . Occorre poi tener conto che il materiale non deve essere neppure
sollecitato con sollecitazioni che ricadono nel campo delle deformazioni plastiche perché in tal
modo ogni sollecitazione produrrebbe delle deformazioni permanenti del corpo.
Carico di Sicurezza
A tale scopo si introduce il concetto di Carico di sicurezza k che definisce lo sforzo unitario
massimo ammissibile a cui può essere assoggettato un dato materiale. Poiché il
comportamento dei materiali è in genere diverso al variare del tipo di sollecitazione applicata si
distinguono, così come per i carichi di rottura, diversi carichi di sicurezza a seconda del tipo di
sollecitazione considerata (carico di sicurezza a trazione, compressione, ecc.).
Il valore dei carichi di sicurezza viene stabilito con metodologia sperimentale dopo aver
definito un fattore di sicurezza n detto Grado di sicurezza che fa riferimento non solo al tipo di
materiale ma anche ad altri parametri che caratterizzano lo stesso. Il valore del carico di
sicurezza k si ottiene dividendo il carico unitario di rotture σr per n
nk rσ=
Il grado di sicurezza è fissato con un criterio empirico. E' evidente che quanto più è
difettoso ed eterogeneo il materiale, ed offre quindi minori garanzie, tanto maggiore è il valore
di n. Questo dipende quindi dal tipo di materiale, dalla sua maggiore o minore eterogeneità,
dal tipo di sollecitazione, dal fatto che i carichi siano costanti o variabili, dalla maggiore o
minore probabilità di difetti nel materiale, ecc.
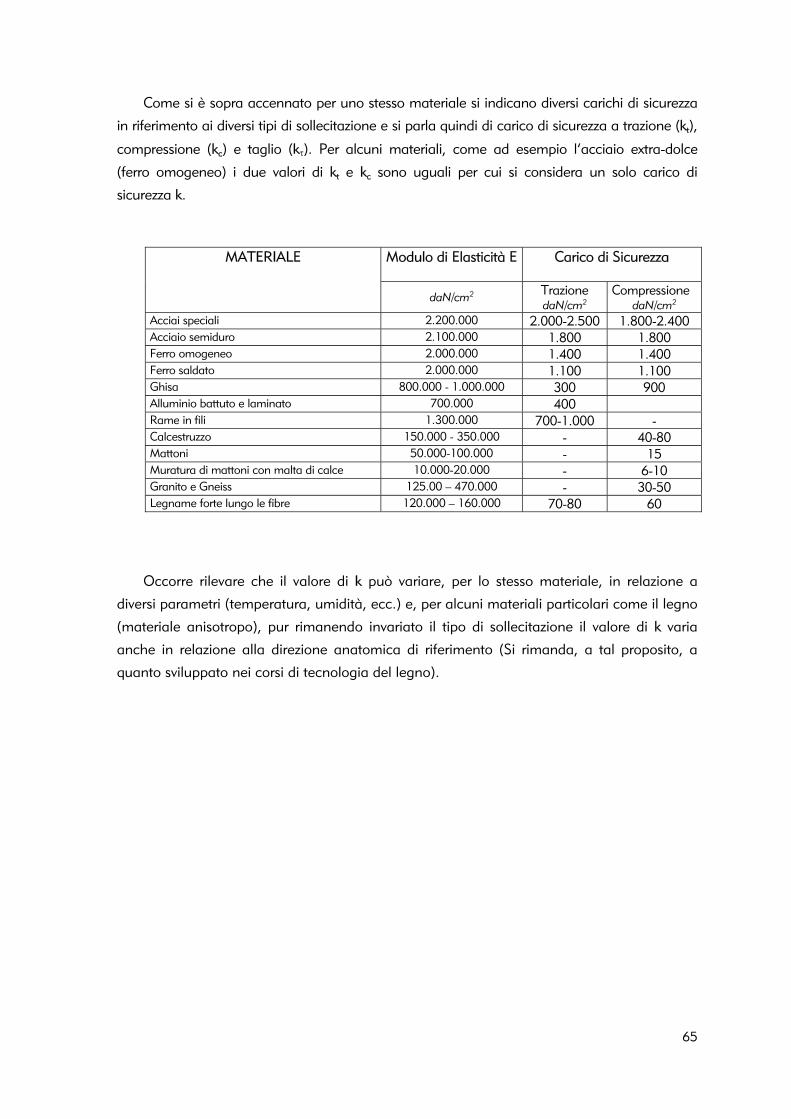
65
Come si è sopra accennato per uno stesso materiale si indicano diversi carichi di sicurezza
in riferimento ai diversi tipi di sollecitazione e si parla quindi di carico di sicurezza a trazione (kt),
compressione (kc) e taglio (kτ). Per alcuni materiali, come ad esempio l’acciaio extra-dolce
(ferro omogeneo) i due valori di kt e kc sono uguali per cui si considera un solo carico di
sicurezza k.
Modulo di Elasticità E
Carico di Sicurezza MATERIALE
daN/cm2 Trazione daN/cm2
Compressione daN/cm2
Acciai speciali 2.200.000 2.000-2.500 1.800-2.400 Acciaio semiduro 2.100.000 1.800 1.800 Ferro omogeneo 2.000.000 1.400 1.400 Ferro saldato 2.000.000 1.100 1.100 Ghisa 800.000 - 1.000.000 300 900 Alluminio battuto e laminato 700.000 400 Rame in fili 1.300.000 700-1.000 - Calcestruzzo 150.000 - 350.000 - 40-80 Mattoni 50.000-100.000 - 15 Muratura di mattoni con malta di calce 10.000-20.000 - 6-10 Granito e Gneiss 125.00 – 470.000 - 30-50 Legname forte lungo le fibre 120.000 – 160.000 70-80 60
Occorre rilevare che il valore di k può variare, per lo stesso materiale, in relazione a
diversi parametri (temperatura, umidità, ecc.) e, per alcuni materiali particolari come il legno
(materiale anisotropo), pur rimanendo invariato il tipo di sollecitazione il valore di k varia
anche in relazione alla direzione anatomica di riferimento (Si rimanda, a tal proposito, a
quanto sviluppato nei corsi di tecnologia del legno).

66
LA STABILITÀ DELLE COSTRUZIONI
Da quanto sopra ricordato deriva che in ogni membratura di una costruzione, soggetta
a carichi e che si comporta come un corpo elastico, ciascun punto è soggetto a sollecitazioni
unitarie. Si è visto anche che, volendo essere garantiti con un determinato grado di sicurezza
della stabilità della membratura, è necessario che le sollecitazioni unitarie prodotte dai
carichi siano in ogni punto inferiori, o al limite uguali, al carico di sicurezza.
Si deve notare però, e lo si vedrà in maggior dettaglio in seguito, che in una stessa
membratura le sollecitazioni unitarie possono essere diverse da un punto all’altro. Dal
momento che sarebbe complicato determinare le sollecitazioni in ogni punto della
membratura, al fine di verificare che in ciascun punto la sollecitazione effettiva sia inferiore o
uguale a quella ammissibile, si opera in modo cautelativo individuando la massima fra le
sollecitazioni unitarie presenti nella membratura e imponendo poi la condizione che:
“La massima sollecitazione presente risulti minore, o al limite uguale, al carico di
sicurezza del materiale”.
Indicando allora con σmax la sollecitazione massima così individuata la condizione di
stabilità della membratura si esprime in modo generale, per ogni tipo di sollecitazione, con
la relazione:
σmax ≤ k
detta Equazione generale di stabilità.
Occorrerà quindi, per ciascuna membratura in esame, individuare:
1. Il tipo di sollecitazione a cui e soggetta,
2. Il valore della sollecitazione unitaria massima,
3. Il carico di sicurezza per il tipo di materiale e per il tipo di sollecitazione in oggetto.
È chiaro che se la condizione suddetta risulta verificata per il punto in cui si manifesta la
sollecitazione massima, a maggior ragione la stessa sarà verificata per tutti gli altri punti
della membratura. Occorre però notare che nel caso di strutture complesse tale criterio può
portare a dimensionamenti eccessivamente abbondanti di alcune parti. In tali casi occorrerà
approfondire lo studio dell’andamento delle sollecitazioni al fine di suddividere la
membratura in parti sollecitate in modo diverso e procedere quindi alla determinazione della
stabilità di ciascuna di esse.
Si vedrà in seguito che a seconda del tipo di sollecitazione, la scienza delle costruzioni
indica i metodi per calcolare il valore (o i valori) di σmax e sarà quindi possibile scrivere, per
ciascun tipo di sollecitazione le Equazioni Particolari di Stabilità (alla trazione, compressione,
flessione, ecc.). Si vedrà inoltre che, in base al tipo di sollecitazione, si potranno determinare
il punto (o i punti) ove si verifica la sollecitazione massima.

67
IL DIMENSIONAMENTO DELLE MEMBRATURE
In base a quanto si è precedentemente osservato è possibile rilevare che il
dimensionamento di una membratura procede attraverso una serie di fasi diverse. In primo
luogo si deve precisare il tipo di sollecitazione presente, il tipo di membratura in esame, il
materiale scelto, ecc. (condizioni di carico e di posa). Successivamente occorre individuare,
con le formule opportune al caso, il valore della sollecitazione massima e quindi la
localizzazione di tale sollecitazione. A questo punto si deve impostare e risolvere l’equazione
generale di stabilità e quindi determinare le dimensioni della membratura in modo che la
condizione suddetta risulti verificata ove si manifesta la σmax.
Le fasi descritte rappresentano il Calcolo di Progetto con il quale si determinano,
attraverso gli opportuni calcoli, le dimensioni della membratura in modo che nelle condizioni
di carico e di posa precisate, questa risulti stabile entro i limiti del grado di sicurezza scelto.
Se invece le dimensioni della membratura sono assegnate è possibile, attraverso il
cosiddetto Calcolo di Verifica determinare se tali dimensioni sono sufficienti a sopportare i
carichi presenti, nelle date condizioni di posa e con il voluto grado di sicurezza. Anche tale
calcolo viene effettuato basandosi sull’equazione di stabilità.

68
PROBLEMI FONDAMENTALI DALLA RESISTENZA DEI MATERIALI
Calcolare una struttura significa studiare il suo comportamento quando sia assoggettata a
determinate azioni.
Lo scopo del calcolo è quello di valutare la sicurezza con cui la struttura è capace di
sopportare i fenomeni derivanti dall’applicazione delle azioni esterne. I fenomeni ai quali
comunemente si fa riferimento sono la rottura del materiale nella sezione maggiormente
sollecitata, a causa del valore eccessivo delle sollecitazioni, ovvero l’insostenibile deformabilità
delle membrature strutturali.
Per valutare l’effettivo grado di sicurezza delle strutture possono essere presi in
considerazione ulteriori fenomeni quali ad esempio le fessurazioni (nel caso del calcestruzzo
teso), il comportamento del materiale sotto carichi ripetuti, il comportamento della struttura
sotto azioni dinamiche, ecc.
Il calcolo, almeno secondo i due casi indicati come principali, può essere condotto in due
modi diversi che dipendono dallo scopo per cui lo stesso viene effettuato:
1. Calcolo di progetto: Considerati i carichi esterni applicati ed il peso proprio della struttura se
ne calcolano dimensioni e forma affinché questa sia in grado di resistere a quei determinati
carichi applicati.
2. Calcolo di verifica della stabilità: In relazione alle forze esterne agenti ed al peso proprio della
struttura si calcolano i carichi massimi di tensione che si sviluppano all’interno della struttura
stessa per verificare che essi siano inferiori o, al limite uguali, ai carichi di sicurezza.
Spesso il calcolo di progetto si unisce al calcolo di verifica dando luogo al calcolo misto che
si adotta quando alcune delle dimensioni geometriche della struttura sono già assegnate da
esigenze costruttive o architettoniche. Ad esempio, un solaio di lunghezza assegnata (esigenza
architettonica) formato da travi di acciaio di determinate dimensioni (esigenza costruttiva)
implicherà la determinazione del solo interasse fra le travi.
Le fasi fondamentali per il dimensionamento di una membratura qualsiasi sono le seguenti:
1. Individuazione del tipo di sollecitazione, del tipo di membratura, del materiale usato, ecc.,
2. Determinazione della sollecitazione massima a cui è soggetta la membratura,
3. Individuazione della posizione ove si esercitano le sollecitazioni massime,
4. Impostazione e risoluzione dell’Equazione generale di stabilità: σmax ≤ k
5. Determinazione delle dimensioni della membratura in modo che sia soddisfatta la
precedente equazione.
69
LA SICUREZZA DELLE STRUTTURE
Per valutazione della sicurezza di un complesso strutturale o di una porzione di una struttura
si intende il controllo di tre parametri fondamentali:
1. il rapporto fra l’entità sollecitante la struttura e l’entità resistente, ovvero fra il sistema di
forze applicate e quello in grado di provocare la rottura dell’opera,
2. la duttilità della struttura, cioè l’ampiezza e l’evidenza del preavviso del collasso finale,
valutata normalmente come la capacità a produrre deformazioni molto appariscenti ma non
pericolose con l’avvicinarsi del collasso,
3. la durabilità valutata come la possibilità dell’opera di mantenere costanti nel tempo i due
parametri precedenti.
La valutazione del livello di sicurezza può essere fatta secondo tre metodi, ciascuno dei
quali offre vantaggi diversi e procede da premesse profondamente diverse fra loro. Tali metodi
sono:
1. il Metodo delle tensioni ammissibili,
2. il Metodo del calcolo a rottura,
3. il Metodo semiprobabilistico agli stati limite.
Nei paragrafi successivi sarà fatto riferimento al Metodo delle tensioni ammissibili.
IL METODO DELLE TENSIONI AMMISSIBILI
Il metodo delle tensioni ammissibili è un metodo di tipo deterministico che consiste nel
valutare la sicurezza verificando che le massime tensioni calcolate nella sezione di maggior
sollecitazione di una membratura (σmax) siano convenientemente lontane dalle tensioni che
delimitano il campo di comportamento elastico del materiale (σel) o da quelle che determinano
la rottura (σr.).
La maggiore sollecitazione viene valutata adottando lo schema di carico ritenuto più
gravoso per l’elemento strutturale, sommando tutte le possibili azioni considerate col loro
massimo valore Qmax.

70
LE SOLLECITAZIONI
Si consideri una qualsiasi trave complessivamente in equilibrio soggetta a forze esterne Pn
ed a reazioni Rn complessivamente in equilibrio (Fig. 63). Una generica sezione S normale
all’asse geometrico del solido divide il sistema nei due tronchi Sa ed Sb su ognuno dei quali le
sole forze esterne attive e reattive non risultano più, in generale, in equilibrio (Fig. 64).
Fig. 63
Fig. 64
È quindi evidente che attraverso la sezione S ogni tronco trasmette all’altro una azione
interna capace di equilibrare le forze esterne agenti su quest’ultima. In particolare, l’azione che
G
Sa t
nS
S
Sb
n
G
t
n S
Sa
RA
A
P1
Rsb
n
t
S
G
P2 P3
RB
Sb
B
Rsa
P1
P2
P3
RB
Sb
Sa
RA
A
B
S

71
Sb trasmette ad Sa coincide con la risultante delle forze esterne agenti su Sb (RSb) e quella che Sa
trasmette a Sb con la risultante delle forze esterne su Sa (RSa).
Facendo riferimento al tronco Sa, scelta una terna cartesiana con origine nel baricentro G
della sezione S, la forza RSb , esercitata da Sb su Sa, mediante una opportuna coppia di trasporto
(M) può essere applicata in G e scomposta secondo gli assi n e t. Si ottengono in tal modo tre
componenti dette rispettivamente:
- N = Sforzo normale o Sollecitazione assiale in S,
- T = Sforzo di taglio in S,
- M = Momento flettente in S.
Analogamente l’azione di Sa su Sb (RSa) darà luogo a tre componenti N, T ed M, applicate
in G della sezione S del tronco Sb, uguali ed opposte alle precedenti in quanto per l’equilibrio
risulta sempre che RSa ed RSb sono uguali ed opposte, qualunque sia la sezione S considerata.
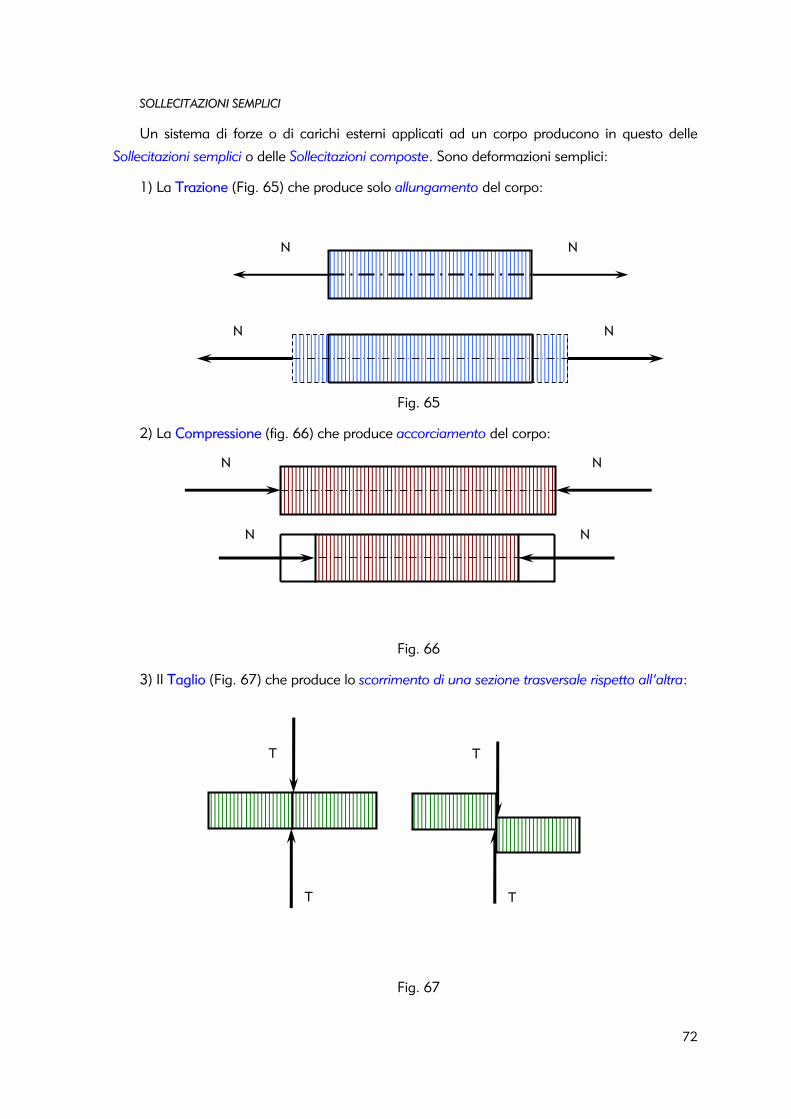
72
SOLLECITAZIONI SEMPLICI
Un sistema di forze o di carichi esterni applicati ad un corpo producono in questo delle
Sollecitazioni semplici o delle Sollecitazioni composte. Sono deformazioni semplici:
1) La Trazione (Fig. 65) che produce solo allungamento del corpo:
Fig. 65
2) La Compressione (fig. 66) che produce accorciamento del corpo:
Fig. 66
3) Il Taglio (Fig. 67) che produce lo scorrimento di una sezione trasversale rispetto all’altra:
Fig. 67
T
T
N N
N N
N N
N N
T
T
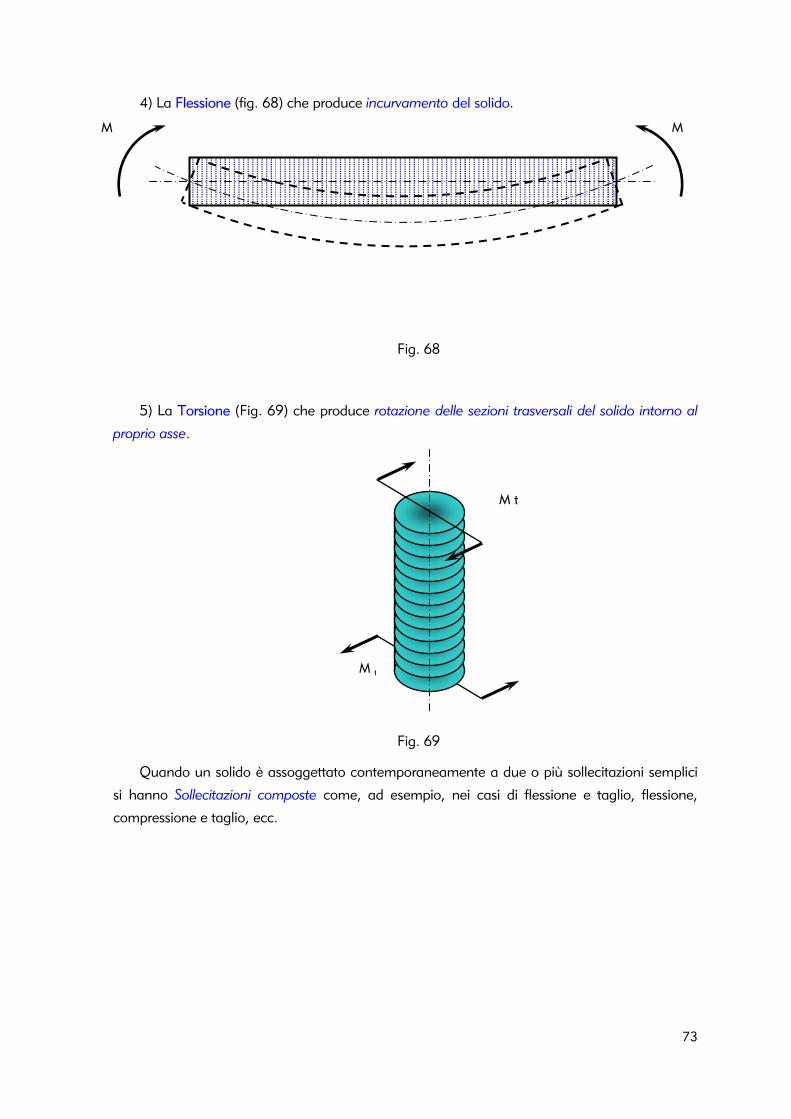
73
4) La Flessione (fig. 68) che produce incurvamento del solido.
Fig. 68
5) La Torsione (Fig. 69) che produce rotazione delle sezioni trasversali del solido intorno al
proprio asse.
Fig. 69
Quando un solido è assoggettato contemporaneamente a due o più sollecitazioni semplici
si hanno Sollecitazioni composte come, ad esempio, nei casi di flessione e taglio, flessione,
compressione e taglio, ecc.
M M
M t
M t
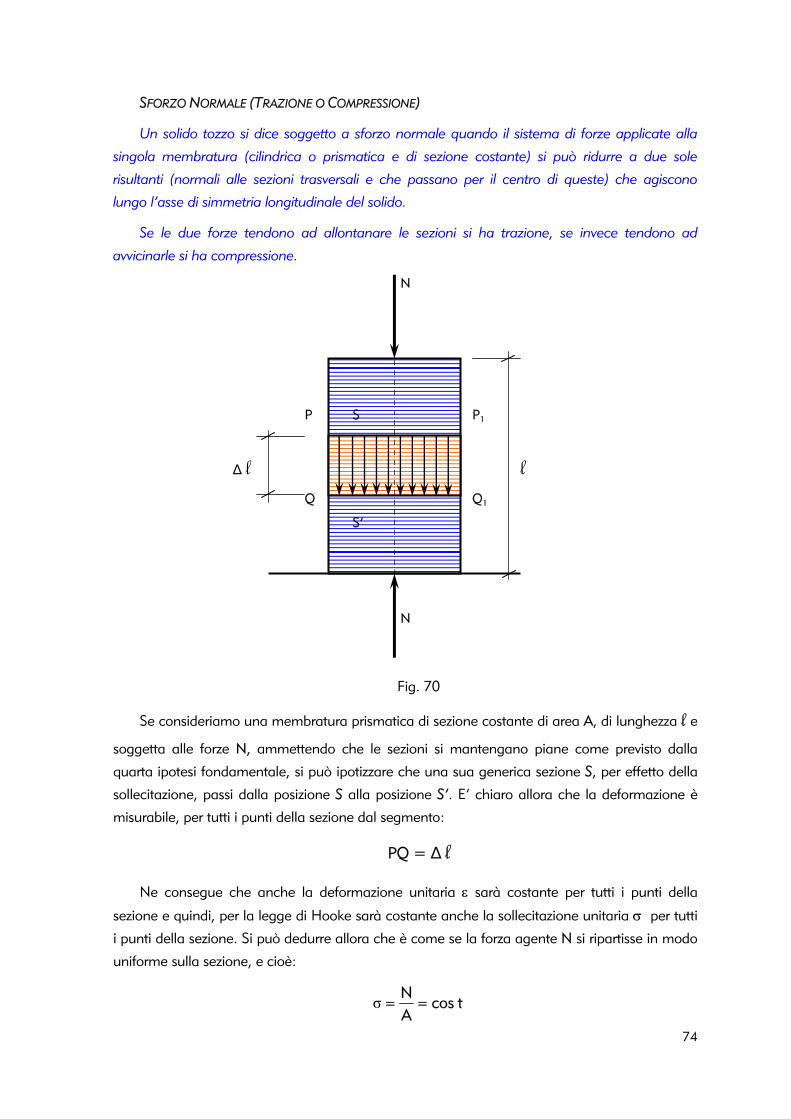
74
SFORZO NORMALE (TRAZIONE O COMPRESSIONE)
Un solido tozzo si dice soggetto a sforzo normale quando il sistema di forze applicate alla
singola membratura (cilindrica o prismatica e di sezione costante) si può ridurre a due sole
risultanti (normali alle sezioni trasversali e che passano per il centro di queste) che agiscono
lungo l’asse di simmetria longitudinale del solido.
Se le due forze tendono ad allontanare le sezioni si ha trazione, se invece tendono ad
avvicinarle si ha compressione.
Fig. 70
Se consideriamo una membratura prismatica di sezione costante di area A, di lunghezza l e
soggetta alle forze N, ammettendo che le sezioni si mantengano piane come previsto dalla
quarta ipotesi fondamentale, si può ipotizzare che una sua generica sezione S, per effetto della
sollecitazione, passi dalla posizione S alla posizione S’. E’ chiaro allora che la deformazione è
misurabile, per tutti i punti della sezione dal segmento:
PQ = ∆ l
Ne consegue che anche la deformazione unitaria ε sarà costante per tutti i punti della
sezione e quindi, per la legge di Hooke sarà costante anche la sollecitazione unitaria σ per tutti
i punti della sezione. Si può dedurre allora che è come se la forza agente N si ripartisse in modo
uniforme sulla sezione, e cioè:
tcosAN
==σ
N
N
l
S
S’
∆ l
P
Q
P1
Q1

75
Il diagramma dei carichi sarà allora rappresentato da una retta orizzontale Fig. 71
Fig. 71
Affinché sussista stabilità occorre che lo sforzo unitario massimo σmax non superi il valore
massimo ammissibile e cioè:
σmax ≤ k
ma poiché la σ è costante su tutta la sezione si potrà scrivere:
σ ≤ k.
Ricordando che:
AN
=σ
si potrà scrivere, sostituendo, l’equazione di stabilità per la trazione e per la compressione:
kAN
≤=σ
Utilizzando tale relazione si può procedere ad effettuare il:
- Calcolo di stabilità o di verifica: Nota la sezione A ed il carico ammissibile k calcolare la
forza massima N che la membratura può sopportare:
kAN≤=σ
- Calcolo di Progetto: Dato il valore del carico che grava sulla membratura ed il carico di
sicurezza del materiale determinare la dimensione della sezione:
N
A0
B1
σ
P
A1
P1
B0

76
kN
A ≥
Come si è visto in precedenza un solido si deforma se soggetto a forze esterne.
Nel caso in esame, detta l la lunghezza iniziale della membratura ed l’ la lunghezza dopo
che è avvenuta la sollecitazione (con l’ < l dal momento che il caso illustrato in figura riguarda
la compressione) generata dalla forza N, la variazione dimensionale sarà data da:
'lll −=∆
ma la deformazione unitaria sarà data dalla:
l'll
l
−=ε
per cui sarà, ricordando che :
εσ
=E
si ha:
lE
ll ⋅=⋅=σε∆
e, perciò:
El
AN
l ⋅=∆
Questa ultima relazione mostra che la deformazione di una membratura prismatica
soggetta a sforzo normale è direttamente proporzionale alla forza sollecitante ed alla sua
lunghezza ed inversamente proporzionale alla dimensione della sezione ed al modulo di
elasticità.
Per quanto riguarda la convenzione dei segni si indica come positivo lo sforzo di trazione e
negativo quello di compressione.

77
FLESSIONE SEMPLICE (RETTA)
Consideriamo una membratura prismatica e di sezione costante S.
Si dice che tale membratura è sollecitata a flessione semplice quando il sistema di forze
applicato può ridursi a due coppie (M), uguali e contrarie, applicate alle due sezioni estreme
del solido ed agenti in uno stesso piano (piano di sollecitazione) passante per l’asse
longitudinale della membratura e quindi perpendicolare alle sue sezioni trasversali.
Si dice asse di sollecitazione l’intersezione del piano di sollecitazione con il piano
contenente la sezione trasversale.
Supponiamo, come si è visto, di applicare le due coppie uguali e contrarie alle sezioni
estreme del solido e poniamo che le sezioni trasversali della membratura siano simmetriche
rispetto all’asse di sollecitazione cioè che questo coincida con un asse di simmetria della
sezione (flessione retta).
Fig. 72
s s
M M
Asse di sollecitazione
SezioneS
M -
M -
M + M +
Dicesi MOMENTO FLETTENTE in una generica sezione S della trave il momento, rispetto
all’asse di sollecitazione della sezione, di tutte le forze (reazioni di vincolo comprese) che si
trovano a sinistra o a destra di tale sezione.
Piano di sollecitazione
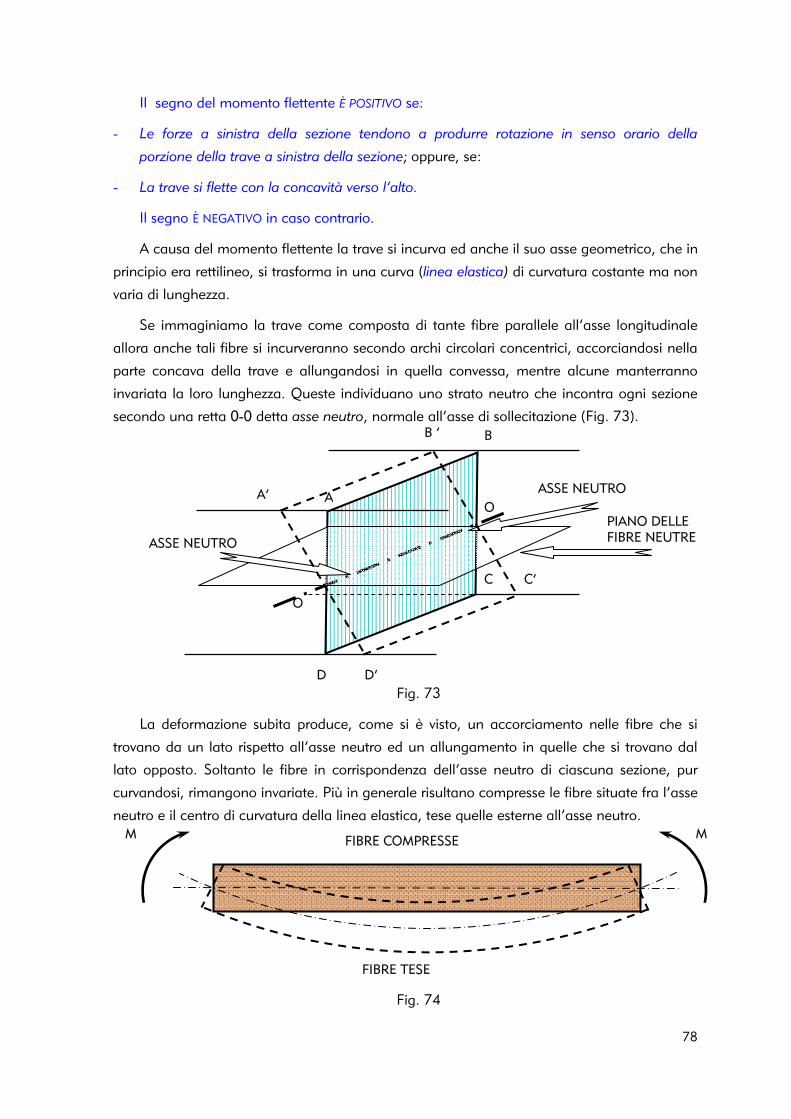
78
Il segno del momento flettente È POSITIVO se:
- Le forze a sinistra della sezione tendono a produrre rotazione in senso orario della
porzione della trave a sinistra della sezione; oppure, se:
- La trave si flette con la concavità verso l’alto.
Il segno È NEGATIVO in caso contrario.
A causa del momento flettente la trave si incurva ed anche il suo asse geometrico, che in
principio era rettilineo, si trasforma in una curva (linea elastica) di curvatura costante ma non
varia di lunghezza.
Se immaginiamo la trave come composta di tante fibre parallele all’asse longitudinale
allora anche tali fibre si incurveranno secondo archi circolari concentrici, accorciandosi nella
parte concava della trave e allungandosi in quella convessa, mentre alcune manterranno
invariata la loro lunghezza. Queste individuano uno strato neutro che incontra ogni sezione
secondo una retta 0-0 detta asse neutro, normale all’asse di sollecitazione (Fig. 73).
Fig. 73
La deformazione subita produce, come si è visto, un accorciamento nelle fibre che si
trovano da un lato rispetto all’asse neutro ed un allungamento in quelle che si trovano dal
lato opposto. Soltanto le fibre in corrispondenza dell’asse neutro di ciascuna sezione, pur
curvandosi, rimangono invariate. Più in generale risultano compresse le fibre situate fra l’asse
neutro e il centro di curvatura della linea elastica, tese quelle esterne all’asse neutro.
Fig. 74
FIBRE COMPRESSE
FIBRE TESE
M M
BB ‘
A’
D D’
A
C’
O
O
C
ASSE NEUTRO
ASSE NEUTRO
PIANO DELLE FIBRE NEUTRE
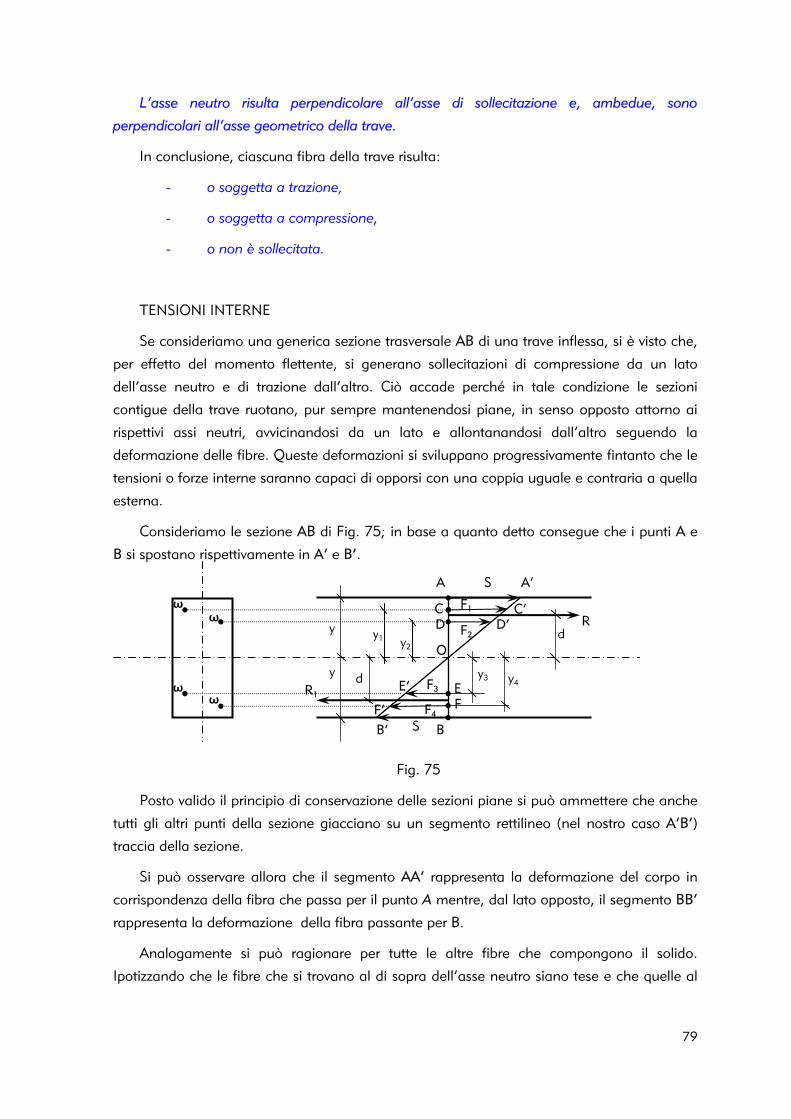
79
L’asse neutro risulta perpendicolare all’asse di sollecitazione e, ambedue, sono
perpendicolari all’asse geometrico della trave.
In conclusione, ciascuna fibra della trave risulta:
- o soggetta a trazione,
- o soggetta a compressione,
- o non è sollecitata.
TENSIONI INTERNE
Se consideriamo una generica sezione trasversale AB di una trave inflessa, si è visto che,
per effetto del momento flettente, si generano sollecitazioni di compressione da un lato
dell’asse neutro e di trazione dall’altro. Ciò accade perché in tale condizione le sezioni
contigue della trave ruotano, pur sempre mantenendosi piane, in senso opposto attorno ai
rispettivi assi neutri, avvicinandosi da un lato e allontanandosi dall’altro seguendo la
deformazione delle fibre. Queste deformazioni si sviluppano progressivamente fintanto che le
tensioni o forze interne saranno capaci di opporsi con una coppia uguale e contraria a quella
esterna.
Consideriamo le sezione AB di Fig. 75; in base a quanto detto consegue che i punti A e
B si spostano rispettivamente in A’ e B’.
Fig. 75
Posto valido il principio di conservazione delle sezioni piane si può ammettere che anche
tutti gli altri punti della sezione giacciano su un segmento rettilineo (nel nostro caso A’B’)
traccia della sezione.
Si può osservare allora che il segmento AA’ rappresenta la deformazione del corpo in
corrispondenza della fibra che passa per il punto A mentre, dal lato opposto, il segmento BB’
rappresenta la deformazione della fibra passante per B.
Analogamente si può ragionare per tutte le altre fibre che compongono il solido.
Ipotizzando che le fibre che si trovano al di sopra dell’asse neutro siano tese e che quelle al
D R
S
F1
F2
A’
EF
d
y4y3
y
y dR1
F3
F4
SB’ B
A
C
O
ω ω
ω ω
C’D’
E’
F’
y1 y2

80
di sotto siano compresse si può dedurre, ad esempio, che le fibre superiori si deformino delle
quantità CC’, DD’, ecc. e quelle inferiori delle quantità EE’, FF’, ecc.
Dal momento che la Legge di Hooke enuncia la proporzionalità fra sollecitazioni e
deformazioni, è possibile affermare che le deformazioni CC’, DD’, EE’, FF’ rappresentano, in
scala opportuna, anche le sollecitazioni F1, F2, F3, F4 in corrispondenza delle relative fibre.
Dalla similitudine dei triangoli AOA’ e COC’ si ricava allora che:
11 yy
FS=
da cui è possibile ricavare che:
yyS
F 11
⋅=
Indicando con σ, f1, f2, f3, f4 le resistenze interne unitarie sviluppate dalle fibre di area ω
si possono ricavare i corrispondenti valori delle resistenze delle fibre:
S=⋅ωσ 11 Ff =ω⋅ 22 Ff =ω⋅ 33 Ff =ω⋅ 44 Ff =ω⋅
Il momento delle resistenze rispetto all’asse neutro calcolato per la generica fibra
passante per C è dato allora da:
21111
111 y
yyy
yy
yyS
yF ⋅ω⋅σ
=⋅⋅ω⋅σ
=⋅⋅
=⋅
Analoghe espressioni possono essere scritte se si considerano gli altri triangoli simili ad
AOA’ e cioè: DOD’, EOE’, FOF’. Si otterranno allora le relazioni:
2222 y
yyF ⋅⋅=⋅ ωσ
2333 y
yyF ⋅ω⋅
σ=⋅
2444 y
yyF ⋅ω⋅
σ=⋅
e, sommando membro a membro si ottiene:
( ) Jy
yyyyy
yFyFyFyF 24
23
22
2144332211 ⋅
σ=⋅ω+⋅ω+⋅ω+⋅ω
σ=⋅+⋅+⋅+⋅
Se indichiamo con R ed R 1 le risultanti delle forze elementari sopra e sotto l’asse neutro,
queste devono generare una coppia interna capace di resistere alla coppia esterna. Tali
risultanti dovranno quindi essere uguali e di segno opposto, e cioè:

81
R = -R1
Da questo si deduce che l’asse neutro n passerà per il baricentro della sezione.
I momenti generati dalle suddette risultanti possono essere ricavati, ricordando il
Teorema di Varignon, con le seguenti relazioni:
dR......yFyF 2211 ⋅=+⋅+⋅
114433 dR......yFyF ⋅=+⋅+⋅
da cui, sommando membro a membro,
1144332211 dRdR......yFyFyFyF ⋅+⋅=++⋅+⋅+⋅
e cioè,
11 dRdRJy
⋅+⋅=⋅σ
Ricordiamo ora, che la somma dei momenti, rispetto ad un punto, delle forze che
costituiscono una coppia è uguale al momento della coppia. Nel nostro caso sarà allora:
r11 MdRdR =⋅+⋅
ove con Mr si indica il momento della coppia generata dalle forze interne.
Ma confrontando questa relazione con la precedente si può ricavare che:
rMJy
=⋅σ
Affinché si abbia equilibrio occorre che sia soddisfatta la relazione: M = Mr ; e quindi è
chiaro che sarà:
MJy
=⋅σ
Da questa relazione è possibile ricavare una nuova relazione che consente di definire il
valore della tensione unitaria massima che si verifica nelle fibre estreme:
JyM ⋅
=σ
La precedente relazione mette in evidenza che:
in una membratura soggetta a flessione la sollecitazione unitaria di trazione o di
compressione è direttamente proporzionale al momento flettente esterno e alla distanza della
fibra più sollecitata ed inversamente proporzionale al momento d’inerzia della sezione.

82
Ma, come si visto, yJ
rappresenta il Modulo o Momento di resistenza W della sezione
rispetto all’asse baricentrico, e potremo scrivere allora:
WM
=σ
e quindi L’EQUAZIONE PARTICOLARE DI STABILITÀ ALLA FLESSIONE sarà, indicando con K’ il
carico di sicurezza a trazione e con K’’ il carico di sicurezza a compressione:
'KWM
≤
''KWM
≤
L’equazione particolare di stabilità alla flessione ci permette di affrontare, come si è visto
per lo sforzo normale, i seguenti problemi:
CALCOLO DI VERIFICA: dati M e W verificare che sia: σmax ≤ K.
KWM
max ≤=σ
CALCOLO DI PROGETTO: dati M e K determinare W.
KM
W ≥
CALCOLO DEL MASSIMO MOMENTO AMMISSIBILE: dati W e K, trovare M.
WKM ⋅=
Si noti che nel caso in cui il materiale sia caratterizzato da diversi valori di K per la
trazione e per la compressione si dovrà usare, per la soluzione dei problemi sopra indicati,
quel valore che ci pone in condizione di maggior sicurezza e cioè il più piccolo fra i due.
Si noti ancora che nel caso di sezioni di forma particolare, come le sezioni rettangolari,
quelle a doppio T, ecc. si hanno valori diversi di J e di W a seconda che questi siano riferiti ai
due diversi assi di simmetria della sezione.
Questi valori sono indicati sui manuali con i simboli Jx e Jy e Wx e Wy e occorre fare molta
attenzione a scegliere quello che corrisponde alla reale direzione di sollecitazione della
struttura. Potendo scegliere si deve ricordare che la disposizione più vantaggiosa di tali
sezioni è quella che assicura il massimo W, cosa che avviene quando l’asse neutro risulta
parallelo alla dimensione minore.
Un’altra osservazione va fatta a proposito del valore di M.
Ricordando la definizione di momento flettente si può infatti dedurre che questo assume
valori diversi nelle varie sezioni della struttura.
83
Nelle formule sopra indicate si dovrà allora inserire il valore di M relativo alla sezione che
ci interessa che, di norma, è quella ove M risulta il massimo fra quelli calcolati.
Da quanto sopra detto e dalla figura della distribuzione delle tensioni lungo una sezione
(Fig. 75), si può dedurre che nella progettazione di una trave è necessario che la maggior
parte del materiale resistente sia nelle zone di maggior sollecitazione, cioè più lontano
possibile all’asse neutro.

84
TAGLIO SEMPLICE
Si dice che una sezione trasversale di una trave è soggetta a TAGLIO SEMPLICE quando la
stessa è sollecitata da una forza T situata nel piano della sezione e passante per il baricentro
di questa e a questa forza corrisponde un’altra forza –T, uguale e contraria che è applicata
alla faccia opposta della sezione.
Lo sforzo di taglio tende a far scorrere fra di loro le sezioni contigue.
Questo scorrimento induce un allontanamento delle molecole del materiale che
reagiscono con le loro forze di legame molecolare generando delle tensioni interne che si
oppongono alle forze esterne. Poiché tali tensioni devono opporsi a forze esterne disposte
tangenzialmente rispetto alla sezione, saranno anch’esse disposte tangenzialmente rispetto
alla sezione e per tale motivo saranno indicate come tensioni tangenziali e contraddistinte
con la lettera τ.
Fig. 76
Tale comportamento può essere esemplificato facendo riferimento all’azione di una
forbice che abbia le due lame che agiscono esattamente sullo stesso piano. Queste, nella
loro azione, dividono un corpo mediante lo scorrimento delle due parti lungo le superfici di
separazione.
Anche per la sollecitazione di taglio si adotta una convenzione dei segni secondo la quale
lo sforzo di taglio nella sezione è positivo quando la risultante delle forze situate a sinistra della
sezione è rivolta verso l’alto, negativo in caso contrario.
È abbastanza raro che si possa avere una sollecitazione di taglio semplice perché a
questa si accompagna sempre un momento flettente, come quando le lame della forbice
non sono perfettamente a contatto fra loro. In tal caso si ha sempre un piccolo braccio “a”
che genera un momento flettente.
Nel caso in cui si riesca a far in modo che il momento flettente abbia valore trascurabile
(giunzioni di lamiere con chiodature o bullonature fortemente serrate, particolari punti delle
capriate in legno, ecc.) si può ammettere che il taglio si ripartisca in modo uniforme sulla
sezione resistente e quindi la tensione tangenziale unitaria sarà data dalla relazione:
T
T
T
T
a

85
AT
=τ
formula che assomiglia molto a quella dello sforzo normale.
Da questa indicando con Kt il carico di sicurezza al taglio, si possono ricavare le relazione
utilizzabili per procedere ai soliti:
CALCOLO DI PROGETTO:
tKT
A ≥
CALCOLO DI VERIFICA:
AT
K t ≥
Come si è visto il taglio semplice si manifesta in strutture nelle quali
contemporaneamente non agisce flessione. Nel caso contrario, quando cioè nelle strutture
agiscono contemporaneamente flessione e taglio, si ha una sollecitazione di taglio diversa
che si chiama “Taglio misto a flessione” : In questo caso non è detto che in tutte le sezioni
della struttura si abbia contemporaneamente taglio ed anche flessione. In generale è così,
ma in qualche tratto della struttura, o in qualche sezione isolata può darsi che sia:
M=0 T≠ 0
M≠0 T=0
Si definisce sforzo di taglio in una generica sezione S la risultante di tutte le forze (reazioni
di vincolo comprese) che si trovano a sinistra o a destra della sezione.
Se una sezione è sollecitata a solo taglio significa che la risultante T passa per il
baricentro della sezione e genera quindi un momento nullo rispetto a questo.
Fig. 77
Considerando la Fig. 77 se trasportiamo T parallelamente a se stessa da S ad un’altra
sezione S’ anche la S’ sarà sollecitata dallo sforzo di taglio T ma dal trasporto di T nasce un
momento M che sollecita la S’ a flessione.
S S’
T T

86
Questo significa che se qualche sezione della trave può essere sollecitata a solo taglio,
nella generalità dei casi ogni sezione sarà sollecitata a taglio ed a flessione.
Sembrerebbe che in questo caso si avesse una sollecitazione composta ma ciò non è
perché le fibre ove si ha il massimo sforzo di taglio (quelle corrispondenti all’asse neutro)
sono quelle nelle quali si annullano le sollecitazioni di flessione mentre dove la flessione è
massima si annulla il taglio (fibre più lontane dall’asse neutro).
È per questo che le due sollecitazioni vengono trattate separatamente e si scrivono:
- una equazione di stabilità per la flessione,
- una equazione di stabilità per il taglio.
È ovvio che le equazioni di stabilità relative ai due tipi di taglio suddetti saranno diverse
e, precisamente si avrà per il taglio semplice:
AT
K t =≥ τ
ove T è lo sforzo tagliante totale nella sezione, A è l’area della sezione, Kt è il carico di
sicurezza al taglio e τ è la sollecitazione unitaria di taglio.
E per il taglio misto a flessione, considerata la sezione di una trave qualsiasi, nel nostro
caso di forma irregolare sarà:
Fig. 78
JbST
ki
it ⋅
⋅=τ≥
ove T è lo sforzo tagliante totale nella sezione calcolabile attraverso la definizione del
taglio in sezioni di trave inflessa, oppure attraverso il diagramma del taglio, J è il momento
d’inerzia rispetto all’asse baricentrico della sezione, bi è la lunghezza della generica fibra ed
Si è il momento statico della sezione.
•
•G
S
n
bihi
Gi
Ai
i si

87
È evidente che si avrà la τmax , in senso assoluto per quella trave, quando si considera la
sezione in cui il diagramma ci dice che T è massimo. Ma è da notare ancora che il valore di
τ non è costante nelle diverse fibre della sezione, ma assume valori diversi a seconda del
punto di tale sezione in cui si considera l’area unitaria si per la quale si valuta la τ. Se si
considera una fibra i avente una certa distanza dall’asse neutro n e parallela ad esso, la cui
lunghezza sia bi , la retta i divide la sezione in due parti. Considerando quella che non
comprende l’asse neutro questa avrà superficie Ai , il suo baricentro sarà Gi e questo disterà
dall’asse neutro del segmento hi .
Se si considera il momento statico Si di questa superficie, esso vale:
iii hAS ⋅=
Tale momento statico è riferito all’asse n.
Quanto più i è lontana dall’asse neutro, tanto più Ai è piccolo, fino a che, per la
distanza massima diventa Ai = 0 e quindi, Si = 0.
La formula:
JbST
ki
it ⋅
⋅=τ≥
ci dice che per Si = 0 diventa τi = 0, cioè la sollecitazione unitaria nella fibra i
all’estremo lembo della trave è uguale a zero. Invece, quando i si avvicina all’asse neutro
cresce Ai in conseguenza di Si; si ha quindi per τi il valore massimo.
Questo significa che quando il taglio è misto a flessione le τ non sono ripartite in
maniera uniforme nella sezione considerata ma assumono valori uguali a zero sui lembi più
lontani dall’asse neutro e valori massimi sull’asse neutro.
La formula predetta ci consente di determinare il valore di τ per le superfici unitarie che
si trovano su una linea i parallela all’asse neutro, ad una certa distanza da esso. Per tutte le
superfici unitarie il cui baricentro è su tale linea la τ ha lo stesso valore, ma cambiando la
linea i varia il valore di τ . Si può dimostrare che se la sezione è rettangolare il diagramma
delle τ , cioè la variazione di τ in funzione della posizione della retta i , ha forma parabolica
(Fig. 79a).
È utile confrontare tale diagramma con quello delle σ dovute alla flessione (Fig. 79b) ed
anche con quello delle τ che si hanno nel taglio semplice (Fig. 79c).
Fig. 79
a b c

88
Dalle due formule si vede che, nel caso del taglio semplice, la τ ha, in una sezione
normale, sempre lo stesso valore per ogni area elementare e quindi il diagramma delle τ è
un rettangolo.
Nel caso del taglio misto a flessione, invece, le τ non sono ripartite in maniera uniforme
nella sezione ma assumono valori uguali a zero sui lembi più lontani dall’asse neutro e valore
massimo sull’asse neutro.
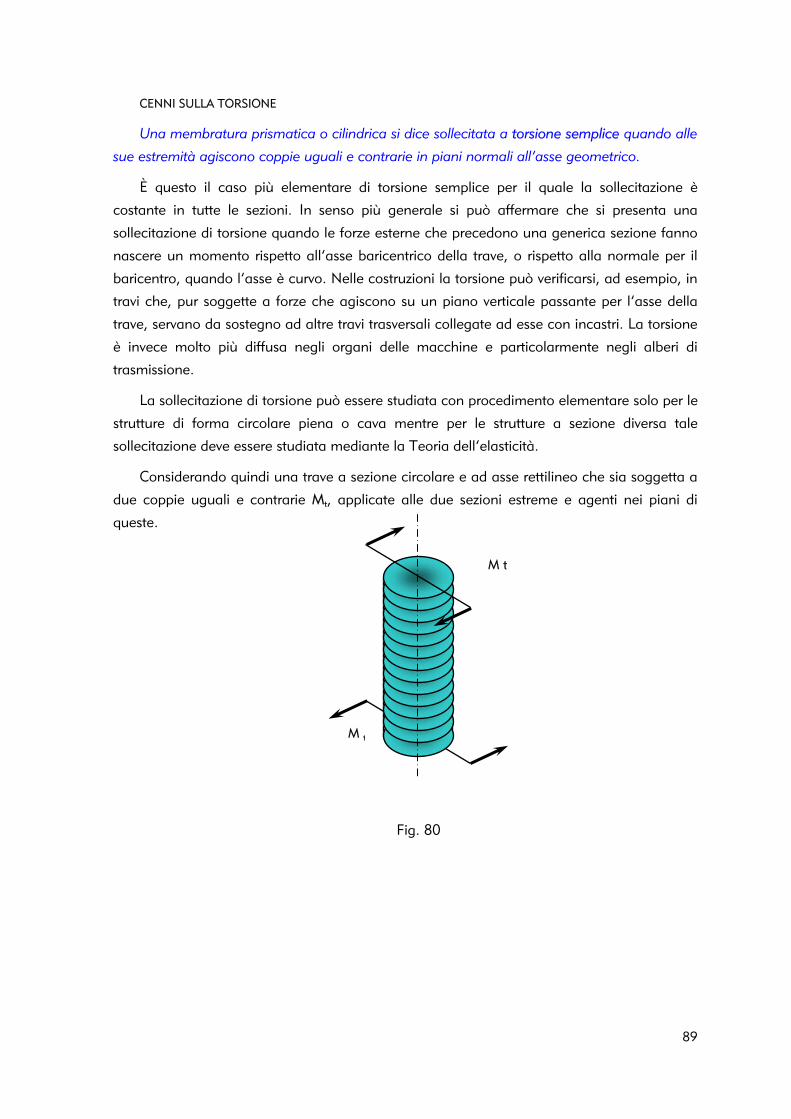
89
CENNI SULLA TORSIONE
Una membratura prismatica o cilindrica si dice sollecitata a torsione semplice quando alle
sue estremità agiscono coppie uguali e contrarie in piani normali all’asse geometrico.
È questo il caso più elementare di torsione semplice per il quale la sollecitazione è
costante in tutte le sezioni. In senso più generale si può affermare che si presenta una
sollecitazione di torsione quando le forze esterne che precedono una generica sezione fanno
nascere un momento rispetto all’asse baricentrico della trave, o rispetto alla normale per il
baricentro, quando l’asse è curvo. Nelle costruzioni la torsione può verificarsi, ad esempio, in
travi che, pur soggette a forze che agiscono su un piano verticale passante per l’asse della
trave, servano da sostegno ad altre travi trasversali collegate ad esse con incastri. La torsione
è invece molto più diffusa negli organi delle macchine e particolarmente negli alberi di
trasmissione.
La sollecitazione di torsione può essere studiata con procedimento elementare solo per le
strutture di forma circolare piena o cava mentre per le strutture a sezione diversa tale
sollecitazione deve essere studiata mediante la Teoria dell’elasticità.
Considerando quindi una trave a sezione circolare e ad asse rettilineo che sia soggetta a
due coppie uguali e contrarie Mt, applicate alle due sezioni estreme e agenti nei piani di
queste.
Fig. 80
M t
M t

90
In tal caso il momento torcente è costante in tutte le sezioni della trave mentre, se sulla
stessa agissero diverse coppie in diverse sezioni il momento torcente sarebbe costante nei
tratti compresi fra due coppie successive e sarebbe uguale alla somma algebrica delle coppie
che precedono la sezione considerata.
La suddetta trave, per effetto delle coppie torcenti, si deforma per rotazione relativa di
ogni sezione, nel proprio piano e attorno al proprio asse, rispetto alle altre.
Anche nel caso della torsione si deve notare che le tensioni interne, che si devono
opporre ad una coppia tangente alla sezione, saranno anch’esse disposte tangenzialmente
alla sezione, e saranno quindi indicate con la lettera τ.
La sollecitazione unitaria di torsione relativa ad una generica sezione S, non è costante
su tutta la sezione ma varia, lungo il raggio, da zero ad un valore massimo.
Nel caso, ad esempio, di una membratura a sezione circolare, la sollecitazione unitaria
di torsione in un qualunque punto P della sezione s giace sul piano della sezione, ha
direzione normale al raggio e vale:
p
t
JrM ⋅
=τ
ove:
- Mt è il momento torcente (momento della coppia esterna),
- r è la distanza del punto P dal centro della sezione,
- Jp è il momento polare d’inerzia della sezione.
Dalla precedente relazione si può dedurre allora che la massima sollecitazione unitaria di
torsione si verifica alla periferia della struttura, in corrispondenza del maggior valore di r:
p
tmax J
RM ⋅=τ
ove R = raggio della membratura
Nel caso della torsione di definiscono valori di sollecitazione ammissibili che
corrispondono a quelli indicati per il taglio (Kt).
L’equazione di stabilità risulta quindi essere:
p
tt J
RMK
⋅≥

91
FLESSIONE DEVIATA
Ogni qualvolta il piano su cui giace il sistema di forze applicato ad una trave inflessa, non
coincide con alcuno degli assi di simmetria della sezione, pur contenendo l’asse della trave, si
ha FLESSIONE DEVIATA.
Esempi di questo tipo di sollecitazione si hanno negli arcarecci dei tetti (travi appoggiate
obliquamente sulle capriate dei tetti, nei solidi a sezione irregolare e in tutti quei casi in cui le
forze agiscono obliquamente.
Fig. 80
La flessione deviata si può considerare come la somma di due sollecitazioni di flessione
semplice agenti secondo gli assi di simmetria della sezione x ed y
Consideriamo una sezione di un solido a sezione rettangolare appoggiato su una
superficie inclinata di un angolo α e sollecitato da una forza P verticale, che immaginiamo
applicata nel baricentro della sezione (Fig. 80).
Se scomponiamo la forza P nelle due componenti P1 e P2 che giacciono sugli assi di
simmetria della sezione, potremo facilmente ricavare le intensità di tali componenti che
saranno:
αcosPP1 = e αPsenP2 =
Queste due forze provocano due momenti flettenti massimi My (rispetto all’asse x) ed Mx
(rispetto all’asse y) i quali, se si suppone l’arcareccio di luce l semplicemente appoggiato ed
uniformemente caricato dal carico totale P, sono dati da:
8lsenP
My
α⋅= e
8coslP
Mx
α⋅=
y
b
h
B
A x
D
C
P2
P1
P
α

92
ma secondo la teoria delle travi inflesse 8
lPM
⋅= è il momento flettente massimo dello
stesso arcareccio sollecitato dallo stesso carico P uniformemente distribuito, qualora la
flessione sia retta. Per questo nella flessione deviata si avrà:
αMsenMy = e αcosMMx =
A tali momenti corrispondono le sollecitazioni unitarie massime così come definite per la
flessione semplice:
yy W
Msen ασ = e x
x WcosM ασ =
che si verificano rispettivamente sulle fibre estreme delle sezioni, nei punti d’incontro
dell’asse x e dell’asse y con i lati della sezione.
In realtà però i due momenti agiscono contemporaneamente per cui, per il principi della
sovrapposizione degli effetti, la sollecitazione unitaria totale σtot è data da:
yxtot σσσ +=
Per determinare la massima sollecitazione totale si devono conoscere le massime
sollecitazioni riferite agli assi x ed y.
Per la sezione rettangolare (come per le sezioni dei profilati più comuni inscrivibili nel
rettangolo) tale somma risulta massima per i vertici delle sezioni B e C poiché lì risultano
contemporaneamente massime, e dello stesso segno, sia la σx che la σy.
La verifica alla stabilità va quindi fatta per tali punti e l’equazione di stabilità assume, per
la parte compressa, la forma:
( ) cmaxyx K≤+ σσ
ossia:
cxy
KW
cosW
senM ≤⎟
⎟⎠
⎞⎜⎜⎝
⎛+
αα
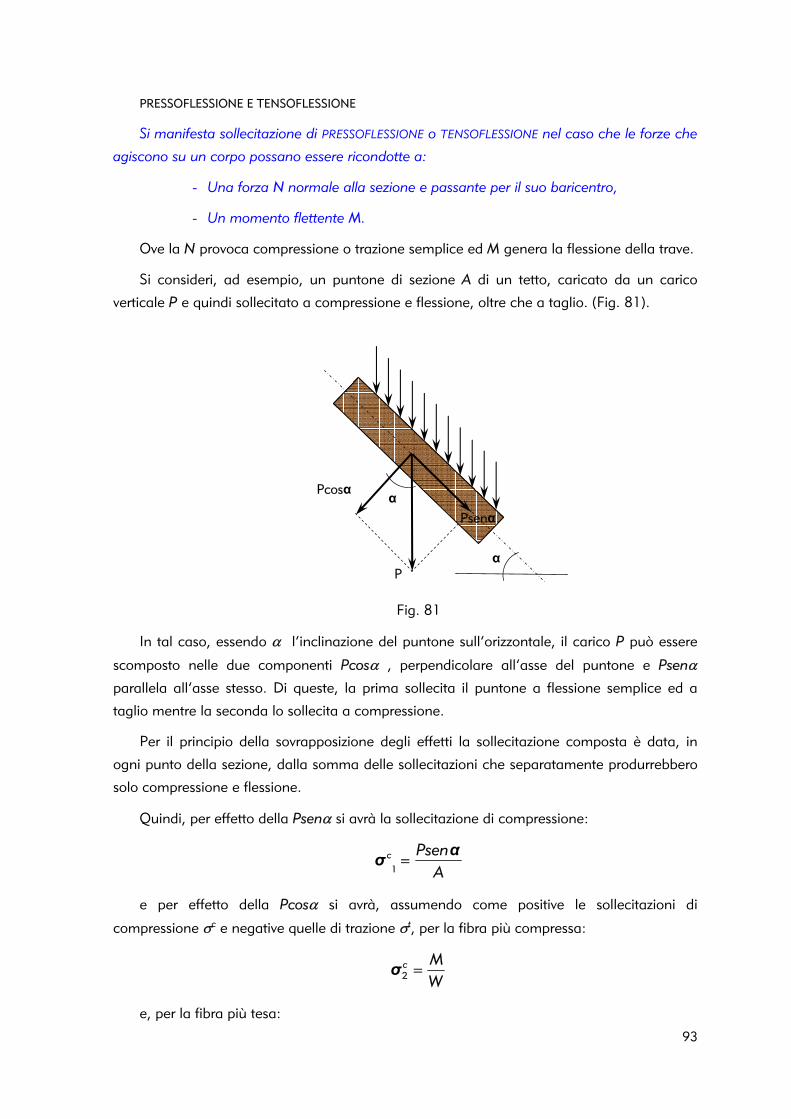
93
PRESSOFLESSIONE E TENSOFLESSIONE
Si manifesta sollecitazione di PRESSOFLESSIONE o TENSOFLESSIONE nel caso che le forze che
agiscono su un corpo possano essere ricondotte a:
- Una forza N normale alla sezione e passante per il suo baricentro,
- Un momento flettente M.
Ove la N provoca compressione o trazione semplice ed M genera la flessione della trave.
Si consideri, ad esempio, un puntone di sezione A di un tetto, caricato da un carico
verticale P e quindi sollecitato a compressione e flessione, oltre che a taglio. (Fig. 81).
Fig. 81
In tal caso, essendo α l’inclinazione del puntone sull’orizzontale, il carico P può essere
scomposto nelle due componenti Pcosα , perpendicolare all’asse del puntone e Psenα
parallela all’asse stesso. Di queste, la prima sollecita il puntone a flessione semplice ed a
taglio mentre la seconda lo sollecita a compressione.
Per il principio della sovrapposizione degli effetti la sollecitazione composta è data, in
ogni punto della sezione, dalla somma delle sollecitazioni che separatamente produrrebbero
solo compressione e flessione.
Quindi, per effetto della Psenα si avrà la sollecitazione di compressione:
APsenc ασ =
1
e per effetto della Pcosα si avrà, assumendo come positive le sollecitazioni di
compressione σc e negative quelle di trazione σt, per la fibra più compressa:
WMc =2σ
e, per la fibra più tesa:
Pcosα
P
Psenα
α
α

94
WMt −=2σ
Perciò, considerando la contemporaneità delle sollecitazioni di compressione e di
flessione, si avrà:
ttmax 21 σσσ += per le fibre più tese e:
ccmax 21 σσσ += per le fibre più compresse.
Potremo, allora, scrivere la relazione:
WM
APsen
tmax
cmax ±=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧ ασσ
Quindi l’equazione di stabilità diventa:
WM
APsen
K
K
t
c ±≥⎭⎬⎫
⎩⎨⎧ α
detta anche Formula Binomia perché è costituita, nel suo secondo membro da un
binomio.
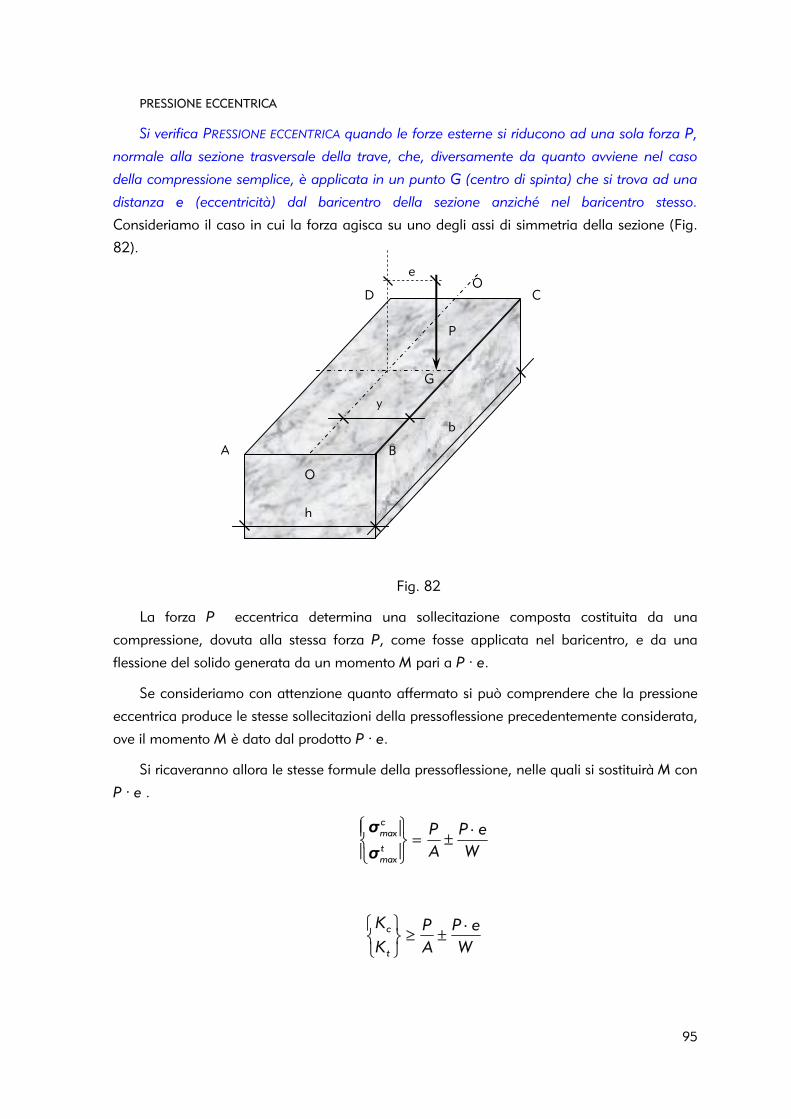
95
PRESSIONE ECCENTRICA
Si verifica PRESSIONE ECCENTRICA quando le forze esterne si riducono ad una sola forza P,
normale alla sezione trasversale della trave, che, diversamente da quanto avviene nel caso
della compressione semplice, è applicata in un punto G (centro di spinta) che si trova ad una
distanza e (eccentricità) dal baricentro della sezione anziché nel baricentro stesso.
Consideriamo il caso in cui la forza agisca su uno degli assi di simmetria della sezione (Fig.
82).
Fig. 82
La forza P eccentrica determina una sollecitazione composta costituita da una
compressione, dovuta alla stessa forza P, come fosse applicata nel baricentro, e da una
flessione del solido generata da un momento M pari a P · e.
Se consideriamo con attenzione quanto affermato si può comprendere che la pressione
eccentrica produce le stesse sollecitazioni della pressoflessione precedentemente considerata,
ove il momento M è dato dal prodotto P · e.
Si ricaveranno allora le stesse formule della pressoflessione, nelle quali si sostituirà M con
P · e .
WeP
AP
tmax
cmax ⋅
±=⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
σσ
WeP
AP
K
K
t
c ⋅±≥
⎭⎬⎫
⎩⎨⎧
A
D C
B
O
Oe
P
G
h
b
y

96
Determinazione della posizione dell’asse neutro
Nel caso sopra esaminato si manifestano quindi delle sollecitazioni interne dovute alla
sollecitazione di compressione ed altre sollecitazioni dovute alla flessione. Tali sollecitazioni
interagiscono fra di loro sommandosi algebricamente in virtù del principio della
sovrapposizione degli effetti.
Mentre la compressione determina sollecitazioni interne omogenee, la flessione porta a
sviluppare sia sollecitazioni di compressione che sollecitazioni di trazione che agiscono
contemporaneamente.
È interessante notare quindi, che anche nel caso non si abbiano condizioni iniziali che
facciano presupporre situazioni di trazione, questa sollecitazione può manifestarsi nella
struttura in conseguenza della presenza della flessione.
Alcuni materiali (murature, calcestruzzo, ecc.) non sono in grado di resistere a
sollecitazioni di trazione per cui è necessario garantire che le strutture realizzate con questi
materiali siano sollecitate soltanto a compressione.
Prendiamo in esame un solido abbastanza corto rispetto alle dimensioni della sezione e
caricato da una forza eccentrica P comunque agente su uno degli assi di simmetria della
sezione (Fig. 83). In relazione al variare dell’eccentricità varia proporzionalmente il momento
flettente. Se la forza fosse baricentrica tutta le sezione sarebbe sollecitata in modo costante
dal solo sforzo normale essendo nullo il momento (caso della compressione semplice) Fig.
83a. Man mano che consideriamo casi in cui la forza è applicata sempre più lontano dal
baricentro, e cresce quindi il momento flettente, aumentano anche le sollecitazioni
determinate da questa flessione.
Fig. 83
Lo studio dell’andamento delle sollecitazioni dovute alla flessione può essere condotto
prendendo in esame la posizione dell’asse neutro. Infatti se l’asse neutro, lungo il quale le
ba
n=∞ n •
e
c
n •
e
d
n•
e
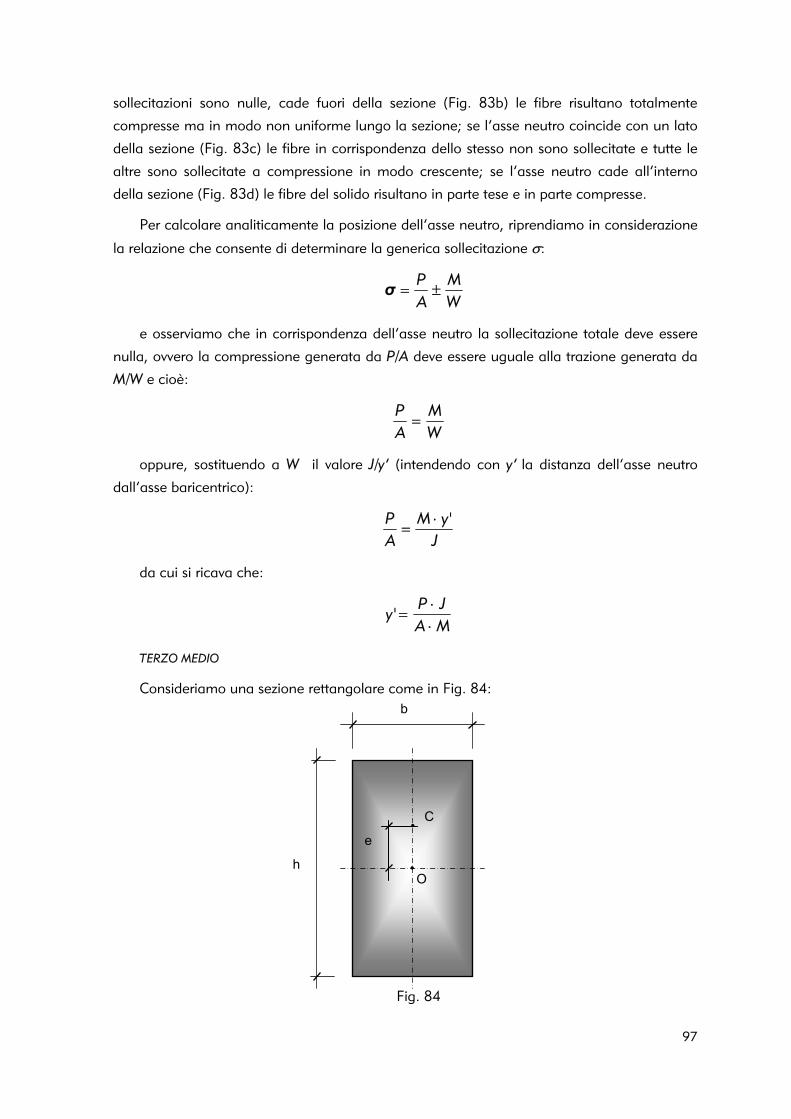
97
sollecitazioni sono nulle, cade fuori della sezione (Fig. 83b) le fibre risultano totalmente
compresse ma in modo non uniforme lungo la sezione; se l’asse neutro coincide con un lato
della sezione (Fig. 83c) le fibre in corrispondenza dello stesso non sono sollecitate e tutte le
altre sono sollecitate a compressione in modo crescente; se l’asse neutro cade all’interno
della sezione (Fig. 83d) le fibre del solido risultano in parte tese e in parte compresse.
Per calcolare analiticamente la posizione dell’asse neutro, riprendiamo in considerazione
la relazione che consente di determinare la generica sollecitazione σ:
WM
AP±=σ
e osserviamo che in corrispondenza dell’asse neutro la sollecitazione totale deve essere
nulla, ovvero la compressione generata da P/A deve essere uguale alla trazione generata da
M/W e cioè:
WM
AP=
oppure, sostituendo a W il valore J/y’ (intendendo con y’ la distanza dell’asse neutro
dall’asse baricentrico):
J'yM
AP ⋅=
da cui si ricava che:
MAJP
'y⋅⋅
=
TERZO MEDIO
Consideriamo una sezione rettangolare come in Fig. 84:
Fig. 84
• C
e
O
b
h •

98
Se C è il centro di spinta risulterà:
hbA ⋅= e 2
61
hbW ⋅=
Le sollecitazioni unitarie massime di compressione e di trazione saranno date dalla:
⎟⎠⎞
⎜⎝⎛ ±
⋅=
⋅⋅
±⋅
=⎪⎭
⎪⎬⎫
he
hbP
hbeP
hbP
maxt
cmax 6
1
6
2σσ
Analizzando la formula precedente è possibile rilevare che, nel caso della sollecitazione
di compressione, e cioè per:
⎟⎠⎞
⎜⎝⎛ +
⋅=
)he
hbPc 6
1σ
questa sarà positiva o nulla e quindi la porzione di sezione che, rispetto all’asse neutro, si
trova dalla parte in cui si verifica la sollecitazione è compressa se σc>0 o scarica se σc=0
Considerando invece la massima sollecitazione di trazione:
⎟⎠⎞
⎜⎝⎛ −
⋅=
he
hbPt 6
1σ
si può notare che la sollecitazione può essere negativa, nulla o positiva a seconda che
risulti:
⎪⎩
⎪⎨
⎧
>=<
−0
00
61
he
Allora, la porzione di sezione dalla parte di σtmax risulta:
- tesa se (σtmax <0),
- non sollecitata se (σtmax =0),
- compressa se (σtmax >0).
Analizzando la precedente:

99
⎪⎩
⎪⎨
⎧
>=<
−0
00
61
he
e cioè:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
>
=
<
he
he
he
6
6
6
1
è possibile ricavare che tale relazione è soddisfatta quando:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
>
=
<
h
h
h
e
616161
o, anche,
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⋅>
⋅=
⋅<
321
321
321
h
h
h
e
Dal momento che con e abbiamo indicato la distanza del centro di pressione dal baricentro
della sezione (eccentricità) e che h/3 rappresenta il terzo medio1 della dimensione h, è
possibile concludere che la porzione di sezione che si trova dalla parte della σtmax sarà :
- tesa quando il centro di pressione C cade all’esterno del terzo medio,
- non sollecitata quando il centro di pressione C cade in corrispondenza del terzo medio,
- compressa quando il centro di pressione C cade all’interno del terzo medio.
Analizziamo adesso i tre casi possibili, facendo riferimento alla Fig. 84a, b, c si può
concludere che:
- Se e > h/6 il centro di pressione si trova fuori dal terzo medio e perciò il solido risulta in
parte compresso ed in parte teso. Il diagramma delle sollecitazioni è incrociato, l’asse
neutro taglia la sezione (Fig. 85a),
- Se e = h/6 il centro di pressione si trova al limite del terzo medio e il solido risulta
completamente compresso, ad eccezione della fibra più estrema, dal lato opposto al
centro di pressione. Il diagramma è un triangolo, l’asse neutro coincide con un lato (Fig.
85b),
- Se e < h/6 il centro di pressione agisce entro il terzo medio e il solido è completamente
compresso. Il diagramma delle sollecitazioni è un trapezio, l’asse neutro è esterno alla
sezione (Fig. 85c)
1 Dividendo il segmento h in tre parti uguali si indica come “terzo medio” la parte centrale di tale segmento.

100
Fig. 85
È chiaro che nel caso il carico sia applicato nel baricentro (compressione semplice) il
solido è uniformemente compresso, il diagramma delle sollecitazioni è un rettangolo e l’asse
neutro è esterno alla sezione e all’infinito.
Si è detto che certi materiali (laterizi, materiali lapidei, ecc.) offrono una resistenza
inaffidabile o molto bassa alla trazione per cui non è possibile far affidamento sulle stesse
quando si manifesti tale sollecitazione. Dobbiamo, in tali casi garantire dunque che la
struttura sia sollecitata esclusivamente a compressione. Perché questa condizione sia
soddisfatta si è visto che la posizione del centro di pressione deve risultare all’interno del terzo
medio della sezione affinché l’asse neutro risulti esterno alle sezioni sollecitate.
Nocciolo centrale d’inerzia
Consideriamo una sezione rettangolare (Fig. 86) con i relativi assi baricentrici ortogonali
fra loro; quando il centro di pressione cade nei punti 1 o 2, l’asse neutro coincide con i lati
AD e BC; quando il centro di pressione cade nei punti 3 o 4 l’asse neutro coincide con i lati
AB o DC.
Fig. 86
a
• n-
+
h/6P
e
h/3 h/3 h/3
h/6P
e
b
•n+
h/6P
e
c
•n
+
h/3 h/3 h/3
h/3
A
D C
B
X
Y
h/3
b/3
23
1
4
b/3
b/3
h/3

101
Il rombo che si ottiene unendo i punti 1,2,3,4, prende il nome di nocciolo centrale
d’inerzia. Se il centro di pressione cade in un punto qualunque del nocciolo centrale
d’inerzia, la sezione risulta interamente compressa.
Risulta chiaro, anche per quanto detto nei paragrafi precedenti, che i punti 1,2,3,4, sono
posti ad 1/3 della lunghezza dell’asse considerato.
Le considerazioni che riguardano il terzo medio sono riferite a situazioni di sezione che
hanno una dimensione prevalente rispetto all’altra, mentre si deve ricorrere al concetto di
nocciolo centrale d’inerzia nel caso di sezioni le cui dimensioni non sono molto diverse fra
loro.
Tutte le considerazioni riportate a proposito del terzo medio possono essere riproposte, in
termini di nocciolo centrale d’inerzia, per questa seconda situazione
102
SOLIDI CARICATI DI PUNTA
Si consideri una solido prismatico o cilindrico di sezione costante la cui lunghezza sia
molto più grande rispetto alle dimensioni della sezione (superiore a circa 15 volte la
dimensione minima della sezione), soggetto a due forze comprimenti che agiscono sull’asse
longitudinale del solido e applicate nei baricentri delle sue sezioni estreme.
Tale caso non può essere trattato come una semplice compressione perché in tali
condizioni:
- è praticamente impossibile che la forza applicata agisca con precisione lungo l’asse
geometrico del solido e quindi esiste sempre una eccentricità che, se anche piccolissima,
porta ad una flessione laterale del solido,
- in secondo luogo, dato che i materiali che costituiscono il solido non sono perfettamente
omogenei e prismatici, la forza applicata non passa in tutte le sezioni in corrispondenza
del baricentro.
Inoltre l’eccentricità “e” del carico, rispetto all’asse dei baricentri delle varie sezioni,
risulta aumentata a causa delle deformazioni generate dalla compressione e quindi gli
spostamenti della linea di azione delle forze rispetto all’asse di simmetria non sono più
trascurabili.
In tali condizioni, a partire da un certo valore del carico, indicato come carico critico
(Pcr), la configurazione rettilinea dell’asse del solido assume una posizione di equilibrio
instabile, cioè l’asse si flette, ed una volta iniziata l’inflessione, la membratura viene
sollecitata da sforzi sempre maggiori fino al cedimento ed alla rottura
È necessario quindi prevedere che il corpo sia soggetto non solo alla semplice
compressione ma anche ad un momento M.
Si dice allora che il solido rettilineo, con dimensioni trasversali piuttosto piccole rispetto
alla lunghezza (solido snello), è soggetto a CARICO DI PUNTA. Quando ciò accade, come si è
detto, il corpo soggetto a compressione assiale si flette lateralmente oltre che comprimersi.
Ma mentre nello studio della compressione semplice si sono sempre considerati solidi
con una sezione abbastanza grande rispetto alla lunghezza, nel caso del carico di punta si
prendono in considerazione solidi con dimensioni piuttosto piccole rispetto alla lunghezza.
Orientativamente si può affermare che un solido che presenta una lunghezza superiore a
10 ÷ 15 volte il lato minore della sua sezione, quando è caricato a compressione semplice,
tende ad inflettersi lateralmente (Fig. 87)
Lo studio teorico di queste deformazioni è stato fatto da Eulero, che ha definito delle
formule che consentono di calcolare il valore di carico critico, oltre il quale il corpo si inflette
improvvisamente con una freccia che può essere considerevole. Queste formule vengono di
regola usate come formule di verifica, cioè servono a stabilire con quale grado di sicurezza
una certa membratura può sopportare un dato carico di punta. E poiché, come vedremo, il

103
Pcr è inversamente proporzionale ad una grandezza l0 (detta lunghezza libera di inflessione)
elevata al quadrato, legata fra l’altro alla lunghezza della membratura, tale carico critico
diminuisce con la lunghezza e per membrature lunghe risulta minore del carico di rottura a
compressione.
Fig. 87
La Formula generale di Eulero indica i parametri che vengono considerati nell’analisi dei
solidi caricati di punta:
20
2
lJE
P mincr
⋅⋅=π
in cui:
- E è il modulo di elasticità del materiale,
- Jmin è il momento d’inerzia minimo della sezione trasversale,
- l0 è la lunghezza teorica di calcolo (lunghezza libera di inflessione).
Poiché π2 è molto prossimo a 10 di solito si usa questo valore.
Questa formula non è però applicabile per corpi corti, in quanto fornisce valori superiori
a quelli che si ottengono con l’applicazione della formula della compressione semplice.
Dalla formula precedente si deduce che il carico Ps, che potremo applicare in sicurezza,
è una frazione n del carico Pcr , frazione che varia da materiale a materiale:
P P

104
crs Pn1
=P
ove:
- per membrature in ferro n = 3 - 4
- per membrature in ghisa n = 8
- per membrature in legno n = 8 - 10
- per le murature n = 12
Sapendo inoltre che un solido va calcolato al carico di punta quando il rapporto l0/a (ove
a rappresenta la dimensione del lato minore della sezione) è superiore ad un numero N
caratteristico per ogni materiale, e cioè:
- per il legname N = 11 ÷ 13
- per murature e c.a. N = 15
- per il ferro N = 20 ÷ 22
- per la ghisa N = 10
rimane da determinare la lunghezza teorica di calcolo l0 che dipende da come è
vincolato il solido. La lunghezza di calcolo l0, infatti, è la lunghezza libera d’inflessione, cioè
la distanza fra due punti di flesso o, considerando la parte inflessa della struttura come parte
di una sinusoide dovuta al ripetersi delle inflessioni, può essere consideratala come la
lunghezza di una semionda.
Si usa distinguere quattro situazioni di vincolo diverse che sono comunemente indicate
come i “Quattro casi di Eulero” che rappresentano membrature vincolate in modo diverso. Si
possono distinguere quindi le seguenti quattro situazioni (Fig. 88):
Fig. 88
l0= l
P P
l0=2l
l
l0=2/3l
l l l0=1/2l
P P
a b c d

105
Caso 1 - Il solido, di lunghezza l è incernierato alle due estremità attraverso le quali
passa la linea di azione del carico P (fig. 88a).
In questo caso le cerniere lasciano libere le estremità del solido di ruotare per cui
nessuna parte del corpo è limitata nella possibilità di questo movimento. Quindi è consentita
l’inflessione per tutta la lunghezza e risulterà quindi l0 = l. La formula di Eulero risulterà
allora:
2
2
lJE
P mincr
π=
Caso 2 - Nel secondo caso il solido è incastrato ad un estremo e libero all’altro, ove si
considera applicato il carico P (fig. 88b) e il suo comportamento è come quello di metà del
corpo dell’esempio precedente. Superando il carico critico il solido si inflette e si considera la
lunghezza della semionda l0 come doppia della lunghezza reale l. Sostituendo quindi a l0 il
valore 2l si ha:
2
2
41
lJE
P mincr
π=
Caso 3 - Il solido è incastrato ad un estremo e incernierato all’altro dove agisce il carico
P (fig. 88c). In tal caso dalla parte della cerniera il corpo è libero di ruotare e quindi di
inflettersi ma dalla parte dell’incastro il vincolo impedisce, in parte del solido, l’inflessione. Il
solido si inflette allora come in figura e la lunghezza libera di inflessione l0 assume il valore
di l⋅32
. Sostituendo si ha allora:
2
2
49
lJE
P mincr
π=
Caso 4 - Nel quarto caso il solido è incastrato a tutte e due le estremità (fig. 88d). Tale
situazione di vincolo limita ancor più la possibilità di libera inflessione del corpo che subisce
una deformazione con due punti di flesso. La lunghezza libera di inflessione è allora pari a
l⋅21
e quindi la formula diventa:
2
2
4l
JEP min
cr
⋅⋅⋅=π
E’ evidente che in tre di questi quattro casi, puramente teorici, almeno uno dei vincoli
deve essere mobile e guidato lungo la linea di azione del carico, altrimenti sarebbe
impossibile determinare le flessioni del solido caricato di punta. Fa eccezione il caso b) in
quanto un estremo è libero, ma anche qui la forza agente P deve essere considerata sempre
parallela nei vari spostamenti.

106
Nella pratica del calcolo per la realizzazione di strutture o sostegni che risultino caricati
di punta, dato che il caso d) non si verifica mai per la impossibilità di realizzare condizioni di
vincolo così esatte, si raggruppano i vari casi con questi criteri:
1. Strutture che sorreggono carichi non spingenti lateralmente, come sono le coperture
piane, i puntoni della capriate, ecc. Si riportano al caso 1) esaminato e si considera l0 = l
per cui si applica la:
2
21l
JEn
P mins
⋅⋅⋅=π
2. Strutture che sorreggono carichi spingenti anche lateralmente, come tettoie inclinate,
tralicci ecc. Si riportano al caso 2) esaminato e si considera l0 = 2l per cui si applica la:
2
2
411
lJE
nP min
s
⋅⋅⋅⋅=π
3. Strutture che sorreggono carichi non spingenti lateralmente, ma con le basi vincolate con
incastro, il più possibile rigido e di cui ci si sia accertati sicuramente. Si riportano al caso
3) considerando l0=2/3 l per cui si applica la:
2
2
491
lJE
nP min
s
⋅⋅⋅⋅=π
ALCUNE OSSERVAZIONI
Nelle travi caricate di punta l’inflessione ha luogo sul piano definito da Jmin e quindi la
trave si inflette mantenendosi nel piano di minor rigidezza.
Col carico centrato la trave si mantiene rettilinea fino a che P < Pcr. Se P ≥ Pcr la trave si
inflette improvvisamente con una freccia che diventa subito grandissima.
Nel caso invece di una trave con carico eccentrico P questa si inflette necessariamente
secondo il piano di sollecitazione che contiene P. Quindi J, entro certi limiti, non è quello
minimo ma quello definito da tale piano.
Col carico eccentrico la trave comincia ad inflettersi anche per piccoli valori di P e la
freccia cresce col crescere di questo. Solo per valori di P elevati può accadere che la trave,
prima di rompersi per flessione sul piano definito dalla forza P , ceda per carico di punta in
un piano diverso (quello cioè di minor rigidezza).
LIMITI DI VALIDITÀ DELLA FORMULA DI EULERO
Il valore del Pcr dato dalla Formula di Eulero risulta:

107
- Piccolo per travi lunghe: la trave arriva all’inflessione laterale per carichi di punta quando
la σ è ancora molto bassa.
- Grande per travi corte: la trave si infletterebbe lateralmente per valori di σ così alti da
essere addirittura superiori al carico di rottura.2.
La Formula di Eulero, infatti, riguarda solo la rottura per instabilità laterale e non la
rottura per schiacciamento. Per quest’ultima essa non serve. Perciò occorre preoccuparsi, per
le travi tozze anche di quest’ultimo pericolo.
Ad esempio, si considerino due sbarrette di ferro delle caratteristiche dimensionali
sottoindicate (la prima tozza e la seconda snella) per le quali si sono calcolati con la formula
di Eulero il carico critico Pcr,E e il valore di σ (indicato con σE ) che si ottiene introducendo
nella formula dello sforzo normale il valore del Pcr,E
kA
P E,crE ≤=σ
LUNGHEZZA
m
φ
mm
A
cm2
Pcr,E
daN
σE
daN/cm2
1,00 5 0,19635 6,36 32,4
0,25 20 3,1416 26.045 8.290
Supponendo di trovarci nel primo caso di Eulero, considerato il fondamentale, per il
quale l0 = l, è possibile rilevare che la σE non deve superare il valore di σel (sollecitazione al
limite di elasticità) altrimenti si avrebbe lo snervamento e la instabilità si verificherebbe
quando non vale più la Legge di Hooke e quindi non varrebbe più neppure la Formula di
Eulero. Si avrà allora:
20
220
2
lAJE
Al
JE
AP min
min
E,crE ⋅
⋅⋅=
⋅⋅
==π
π
σ
RAGGIO D’INERZIA (ρ) E RAPPORTO DI SNELLEZZA (λ)
Si definisce “Raggio d’Inerzia” ρ la radice quadrata del rapporto fra il momento d’inerzia
(baricentrico) e l’area della sezione considerata.
AJ
=ρ
2 Questo deriva dal fatto che Pcr (e Ps) sono in relazione con l0
2 posto al denominatore per cui se esso aumenta
diminuisce Pcr.

108
Si è visto che a seconda dell’asse baricentrico considerato il momento d’inerzia assume
valori diversi che variano fra un valore massi Jx ed uno minimo Jy.
L’area della sezione ha invece sempre lo stesso valore per cui il valore di ρ (detto anche
raggio giratore) è massimo quando si considera il momento d’inerzia massimo. Allora la
formula precedente diventa:
20
22
lE min
E
ρπσ ⋅⋅=
Si potrebbe dimostrare che i valori massimo e minimo di ρ corrispondono ai semiassi di
un’ellisse avente come centro il baricentro della sezione; tale ellisse prende il nome di Ellisse
Centrale d’Inerzia.
Si definisca “Rapporto di snellezza” λ il rapporto fra la lunghezza libera di inflessione della
trave e il raggio d’inerzia minimo.
min
lρ
λ 0=
Potremo scrivere allora la:
20
22
lE min
E
ρπσ ⋅⋅=
come:
el
min
E
El
E σλ
π
ρ
πσ ≤⋅
=⋅
= 2
2
2
20
2
e quindi:
limE
E λσ
πλ =≥
λlim ci consente di stabilire se il corpo è tozzo o snello.
Ad esempio si ha:
- Ferro omogeneo λlim = 100
- Acciai λlim = 80 – 90
- Ghisa λlim = 80
Dalle formule suddette si può anche ricavare la lunghezza libera di inflessione in
rapporto al diametro d oppure in rapporto al lato minore della sezione rettangolare b al
limite, cioè quello corrispondente al rapporto di snellezza limite.
109
METODO ω
Il carico di punta può essere calcolato anche con metodi diversi da quello di Eulero e, in
particolare, col cosiddetto Metodo ω che è reso obbligatorio per le strutture metalliche e in
C.A.
La formula relativa a tale metodo si applica per qualunque valore di λ, e cioè sia che la
struttura sia snella che tozza.
Si definisce il coefficiente ω come il rapporto fra il carico di sicurezza Kc del materiale
considerato ed un carico di sicurezza Kr opportunamente ridotto tenuto conto della snellezza
λ della trave:
r
c
kk
=ω
Il carico ammissibile Ps sulla struttura caricata di punta in condizioni di sicurezza è:
ωAk
=P cs F. di Verifica
ove:
- kc = carico di sicurezza del materiale
- A = Area della sezione della struttura
- ω = coefficiente definito come si è detto, ricavabile da apposite tabelle in
corrispondenza del λ della struttura
Volendo progettare la struttura, invece della predetta formula si usa la seguente Formula
di Progetto:
ckP
=Aω

110
STRUTTURE RETICOLARI
Le strutture reticolari sono dei sistemi rigidi costituiti da un insieme di aste rettilinee
che si considerano collegate fra loro, agli estremi, mediante cerniere prive di attrito (talora
si considerano semiincastrate). I punti in cui concorrono più aste si dicono nodi e si
considera che tutte le forze siano applicate nei nodi.
Queste strutture sono utilizzate per realizzare pilastri, travature e capriate. Talora si
realizzano torri per sostenere linee elettriche, teleferiche, gru, campate di ponti, ecc. in
questi casi le strutture hanno quasi sempre il carattere di strutture spaziali e come tali
vanno calcolate.
Le travi e le capriate invece, sono nella massima parte dei casi riconducibili a strutture
piane e quindi sono calcolabili come queste (tre equazioni in tre incognite).
Considerando un’asta generica, le cerniere con le quali questa termina trasmettono
all’asta stessa, nelle condizioni di equilibrio della travatura, forze uguali ed opposte agenti
lungo l’asse dell’asta. Tali forze possono esercitare sull’asta sollecitazioni di trazione
(tiranti) o sollecitazioni di compressione (puntoni).
Nelle strutture reticolari si possono considerare diversi elementi; nel caso dell’esempio
di fig. 89 si individuano:
- Un Corrente superiore,
- Un Corrente inferiore,
- Aste di parete (Montanti, e Aste Diagonali).
Fig. 89
Nelle strutture reticolari si hanno due tipi di vincolo:
- I vincoli esterni che collegano l’intera struttura con strutture esterne,
- I vincoli interni che collegano fra loro le aste della struttura
Corrente superiore
Corrente
inferiore
Aste diagonali Montanti
Nodi
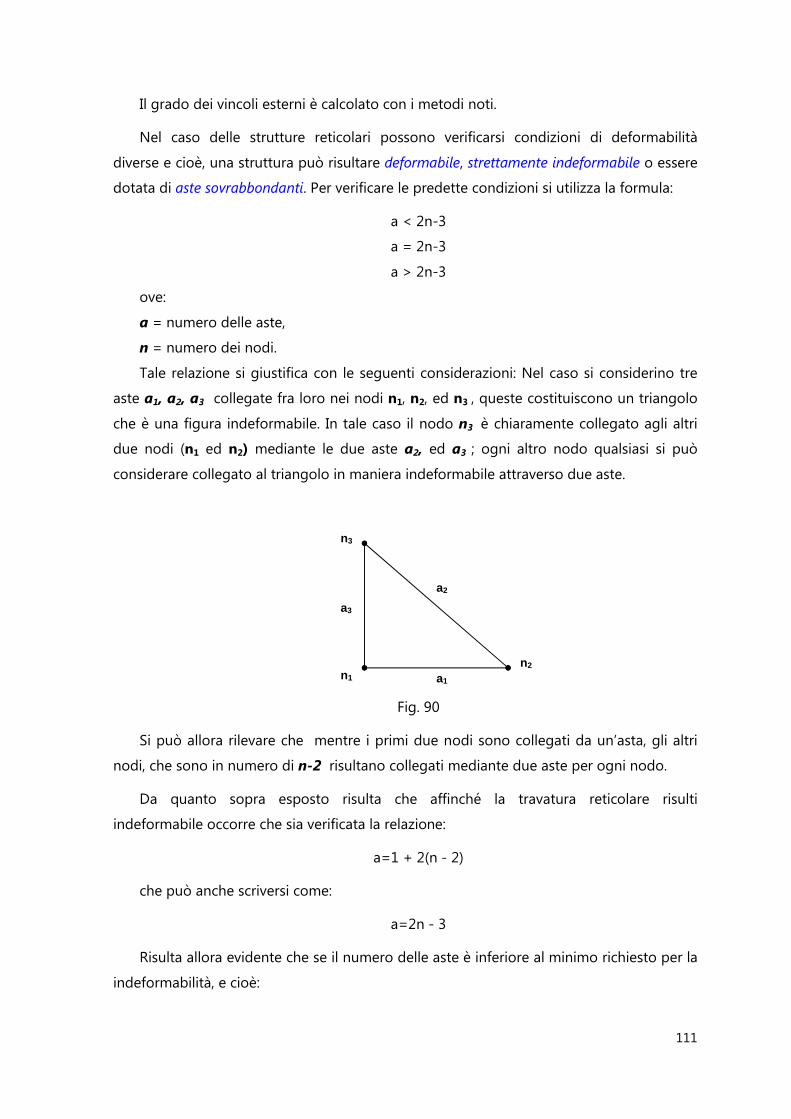
111
Il grado dei vincoli esterni è calcolato con i metodi noti.
Nel caso delle strutture reticolari possono verificarsi condizioni di deformabilità
diverse e cioè, una struttura può risultare deformabile, strettamente indeformabile o essere
dotata di aste sovrabbondanti. Per verificare le predette condizioni si utilizza la formula:
a < 2n-3
a = 2n-3
a > 2n-3
ove:
a = numero delle aste,
n = numero dei nodi.
Tale relazione si giustifica con le seguenti considerazioni: Nel caso si considerino tre
aste a1, a2, a3 collegate fra loro nei nodi n1, n2, ed n3 , queste costituiscono un triangolo
che è una figura indeformabile. In tale caso il nodo n3 è chiaramente collegato agli altri
due nodi (n1 ed n2) mediante le due aste a2, ed a3 ; ogni altro nodo qualsiasi si può
considerare collegato al triangolo in maniera indeformabile attraverso due aste.
Fig. 90
Si può allora rilevare che mentre i primi due nodi sono collegati da un’asta, gli altri
nodi, che sono in numero di n-2 risultano collegati mediante due aste per ogni nodo.
Da quanto sopra esposto risulta che affinché la travatura reticolare risulti
indeformabile occorre che sia verificata la relazione:
a=1 + 2(n - 2)
che può anche scriversi come:
a=2n - 3
Risulta allora evidente che se il numero delle aste è inferiore al minimo richiesto per la
indeformabilità, e cioè:
n3
a3
n1
n2
a2
a1

112
a<2n - 3
la travatura risulta deformabile, mentre nel caso opposto, e cioè per:
a>2n - 3
il numero delle aste risulta esuberante.
Affinché una travatura risulti indeformabile occorre quindi che le sue maglie siano
triangolari.
Perché si possa arrivare ad un risultato la formula deve sussistere per tutta la trave,
oppure per qualunque porzione di essa. Infatti, affinché si abbia l’indeformabilità, non solo
le aste debbono essere in numero strettamente sufficiente nel complesso della trave ma
devono essere anche distribuite all’interno della trave in modo che ciascun elemento
parziale della trave stessa risulti indeformabile. Ad esempio nella trave seguente, nel
quadrilatero P una delle diagonali è esuberante, cosa che si può verificare applicando la
formula a = 2n –3 (a= n° delle aste, n = n° dei nodi) mentre nel Q manca un’asta.
Fig. 91
Per il calcolo delle strutture reticolari si deve innanzitutto procedere a individuare tutte
le forze esterne applicate, comprese le reazioni dei vincoli esterni, che si determinano
come se la struttura non fosse reticolare.
Occorre poi precisare che si considerano le forze esterne come fossero sempre
applicate nei nodi. Se le forze agissero sulle aste, e non nei nodi, si dovrebbero
determinare, per ciascuna asta, le componenti agli estremi e considerare queste ultime
come agenti nella struttura reticolare sui nodi salvo, alla fine, tener conto che queste aste,
oltre ad essere sollecitate assialmente a trazione, compressione o carico di punta, possono
essere sollecitate anche a flessione e taglio. Ma questo, in genere, è un caso che interessa
solo qualche asta. In generale, invece, le aste delle strutture reticolari sono sollecitate solo
da compressione assiale, da trazione assiale o da carico di punta.
P Q a = 2n - 3
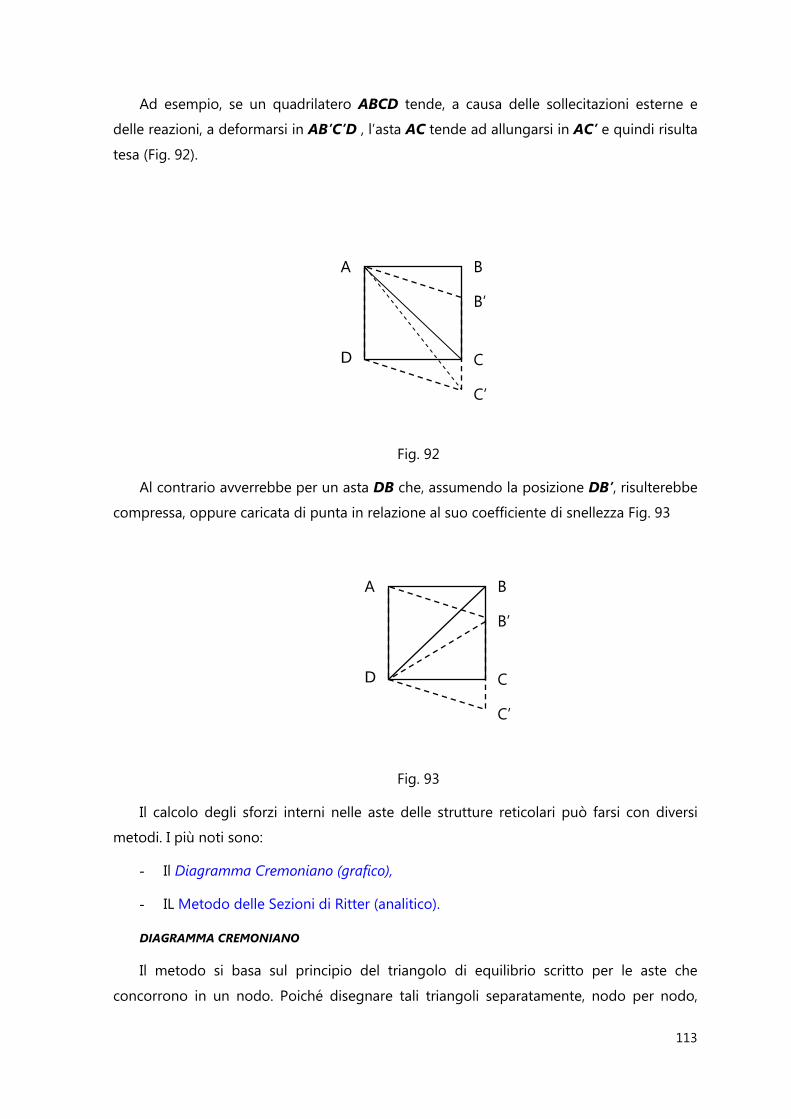
113
Ad esempio, se un quadrilatero ABCD tende, a causa delle sollecitazioni esterne e
delle reazioni, a deformarsi in AB’C’D , l’asta AC tende ad allungarsi in AC’ e quindi risulta
tesa (Fig. 92).
Fig. 92
Al contrario avverrebbe per un asta DB che, assumendo la posizione DB’, risulterebbe
compressa, oppure caricata di punta in relazione al suo coefficiente di snellezza Fig. 93
Fig. 93
Il calcolo degli sforzi interni nelle aste delle strutture reticolari può farsi con diversi
metodi. I più noti sono:
- Il Diagramma Cremoniano (grafico),
- IL Metodo delle Sezioni di Ritter (analitico).
DIAGRAMMA CREMONIANO
Il metodo si basa sul principio del triangolo di equilibrio scritto per le aste che
concorrono in un nodo. Poiché disegnare tali triangoli separatamente, nodo per nodo,
A
D
B
B’
C
C’
A
D
B
B’
C
C’

114
significa riportare rette parallele e lunghezze di segmenti con operazioni che danno
sempre luogo a numerosi errori, il Cremona studiò una regola che consentiva di disegnare
i triangoli di equilibrio riutilizzando per ciascuno dei successivi, gli stessi lati già disegnati
per i precedenti.
La ricerca degli sforzi fatta col metodo grafico non è molto precisa nei suoi risultati.
Essa impone di cominciare il calcolo da un nodo e proseguirlo nei successivi in modo che
per ogni nodo non si abbiano più di due incognite e ciò fino alla fine del calcolo. Questo
metodo non consente di calcolare gli sforzi in un’asta intera se prima non si sono calcolate
le precedenti.

115
METODO DELLE SEZIONI DI RITTER
Col metodo di Ritter si possono determinare gli sforzi in tre aste interne alla struttura
reticolare anche senza aver determinato quelli delle aste precedenti o seguenti. Anzi, con
questo metodo si riesce a determinare lo sforzo anche di una sola qualsiasi asta
intermedia.
Fig. 94
La struttura reticolare si immagina tagliata in modo da interrompere tre aste (come si
è detto supposte incernierate) non convergenti in un punto. Prima del taglio il moncone di
destra e quello di sinistra rimanevano in equilibrio, dopo il taglio entrambi crollano. Ciò
accade perché gli spezzoni di sinistra delle aste tagliate ora non riescono più a trasmettere
sforzi adeguati agli spezzoni di destra delle stesse e, viceversa, gli spezzoni di destra non
riescono più a reagire a tali sforzi trasmettendo agli spezzoni di sinistra forze uguali e
contrarie.
Lo stesso ragionamento si potrebbe fare anche considerando azioni le forze di destra
e reazioni le forze di sinistra.
Quando ancora non si è eseguito il taglio si ha equilibrio, in corrispondenza dei punti
ove questo verrà eseguito, perché in ciascuno di essi si manifestano un’azione e una
reazione uguali e contrarie.
P1
P2
P3
P4
P5
P7
P6
A
g b
a
D
d B
m
G
H f
h
llll C
L

116
È possibile concludere quindi che nei vari punti delle sezioni si manifestano sforzi
agenti lungo le aste, per ora sconosciuti, atti a realizzare l’equilibrio.
Che tali sforzi agiscano lungo le aste è evidente; ciò che non si conosce a priori sono il
loro verso e la loro intensità. Per determinare versi e direzioni degli sforzi incogniti si
procede nel seguente modo.
Si indicano nel disegno con un verso qualsiasi e con un’intensità qualsiasi gli sforzi
incogniti H, G, L, che si suppone che il moncone di destra trasmetta al moncone di sinistra.
Se si ammette che H, G, L agiscano sul moncone di sinistra, evidentemente
quest’ultimo resterà in equilibrio anche mancando il moncone di destra.
Scriviamo quindi l’equazione:
∑∑∑∑ ==== 0M z
relativa alle forze in oggetto e assumendo come poli quei punti che, ogni volta, fanno
si che delle tre incognite H, G, L se ne annullino due.
Scriviamo, ad esempio, l’equazione dei momenti rispetto a C.
Rispetto a tale punto i momenti delle forze H e G assumono valore zero perché il
braccio vale zero. Rimane quindi la sola incognita L il cui valore si può ricavare con la:
(((( )))) 0hLbPaPA 21 ====⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−
Scrivendo adesso la stessa equazione rispetto a D si annullano le incognite G ed L e
rimane la H che si può determinare:
(((( )))) 0fHmPdPcPA 321 ====⋅⋅⋅⋅++++⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−
e così via.
Quando i risultati ottenuti per H, G, L sono negativi significa che il verso ipotizzato nel
disegno, e in base al quale si sono fatti i calcoli, non è quello giusto e pertanto occorre
invertirlo.





![=µ P - die.ing.unibo.it · L’introduzione delle grandezze essenziali per la descrizione del campo magnetico prodotto dai ... la forza ) =qm +.Ma O¶HVSHULHQ]D KDVLQRUDHVFOXVRO¶HVLVWHQ]D](https://static.fdocument.pub/doc/165x107/5c68f50a09d3f242168c457c/-p-dieinguniboit-lintroduzione-delle-grandezze-essenziali-per-la.jpg)

![Illuminotecnica - Grandezze Fotometricheacustica.ing.unibo.it/AAI2/01 Grandezze Fotometriche.pdfTitle Microsoft PowerPoint - 01 Grandezze Fotometriche.ppt [modalità compatibilità]](https://static.fdocument.pub/doc/165x107/5f7df6314748e352b1085323/illuminotecnica-grandezze-grandezze-fotometrichepdf-title-microsoft-powerpoint.jpg)