Forward kinematics of the general 6–6 Stewart platform using algebraic elimination
13
Forward kinematics of the general 6±6 Stewart platform using algebraic elimination Tae-Young Lee, Jae-Kyung Shim * Department of Mechanical Engineering, Korea University, 5-Ka Anam-Dong Sungbuk-Ku, Seoul, 136-701, South Korea Received 19 June 2000; accepted 23 February 2001 Abstract It is known that the number of solutions of the forward kinematics of the general 6±6 Stewart platform is up to 40 in the complex domain. Finding all the solutions is necessary when all the possible postures are of interest or a unique actual posture is to be determined by choosing the correct one out of the solutions. In such cases, algebraic elimination method can be a powerful tool. In this article, an elimination procedure for the forward kinematics of the general 6±6 Stewart platform is presented, which leads to a 40th-degree univariate equation without factoring out or deriving the greatest common divisor. In addition, the pro- posed method, when implemented in a computer language, requires less computation time than the existing algorithms do mainly because the size of the ®nal Sylvester's matrix is relatively small. The algorithm is demonstrated by two numerical examples. Ó 2001 Published by Elsevier Science Ltd. 1. Introduction The Stewart platform is a fully parallel mechanism that generally consists of two rigid bodies connected to each other through six legs. Depending on the arrangement of the legs, the platform can be divided into dierent types such as the 3±3, 5±4, 6±5, and 6±6. Particularly, the general 6±6 Stewart platform has distinctly and arbitrarily located joints in its base and moving platform. This fact makes its forward kinematics the most challenging one among all the types of Stewart platforms. It is known that the number of solutions of the problem is up to 40 in the complex domain. When all the possible postures are of interest or a unique actual posture is to be de- termined by choosing the correct one out of the obtained solutions, a method to ®nd all the solutions is necessary. As is known, algebraic elimination can be a good solution method for such Mechanism and Machine Theory 36 2001) 1073±1085 www.elsevier.com/locate/mechmt * Corresponding author. Fax: +82-2-926-9290. E-mail address: [email protected] J.-K. Shim). 0094-114X/01/$ - see front matter Ó 2001 Published by Elsevier Science Ltd. PII:S0094-114X01)00034-9
-
Upload
tae-young-lee -
Category
Documents
-
view
219 -
download
1
Transcript of Forward kinematics of the general 6–6 Stewart platform using algebraic elimination

������� ������ � �� �� ���� ��� ������ �������� ����������� ��������
������� �� ���� �� ���� !
���������� ��� ������ ������������ ���� ����������� ���� �������� ����������� ����� � !�"#�� ��� ����
" �#� $% �� &'''( � ��� &) ������ &''$
��������
*� �� ��� ���� �� ���� �� �������� �� �� ������� ������ � �� �� ���� ��� ������ �������� ���� �� +' � �� ����, �����- ����� ��� �� �������� �� ���� �� ��� �� ������� ������� �� ������� �� � ��.� � ���� ������ �� �� � ������ � ������ �� ��� � � ��� �� �� ��������- *�� � ���� ������� �������� ����� � � � ������� ����- * ���� ���� �� � �������� ��� ������ �� ������� ������ � �� �� ���� ��� ������ �������� �� ������ ��� � ���� �� � +'��������#����� .����� ������� �� ����� ��� �� ���#�� �� ������ ���� ��#����- * �������� �� �������� ������ �� ������� � � ������ ������� �.���� ��� ��������� ��� ��� �� ,��������������� �� ���� � ��� �� ��/ �� �� 0�� � �#���1� �����, �� �����#� �����- �� ��������� ����������� � ��� ���� �� ,�����- � &''$ 2������� � 3��#�� � � ���-
� ���� ������
�� ������ �������� �� � ���� ������� � ����� ���� ����� ������ �� ��� ����� ����� � �� �� � � ���� ������� ��, ���- 4���� � �� ������� �� �� ���� �� �������� � � ��#��� ��� ��5�� � �� �� � �� �� )�)� 6�+� ��6� �� ���- 2���� ����� � �� ���� ��������� �������� ��� ����� �� �� ���������� �� ��� 7���� � ��� ��� �� ��#�� ��������- ������ � ���� ��� ������� ������ � �� ���� ������� � ���� ��� �� � �� �� ���������������- *� �� ��� ���� �� ���� �� �������� �� �� ������ �� �� �� +' � �� ����,�����- 8� ��� �� ������� ������� �� �� ����� �� � ��.� � ���� ������ �� �� � ������� � ������ �� ��� � � ��� �� �� ������ ��������� � ����� �� 0� ��� ���������� �� ���� - 9� �� ���� ������� �������� � � � ���� ������� ����� ��� �� �
: ����� �� :� �� ���� )� ;&''$< $'=)�$'>6���-��#��- ��?�� ��?� ���
!@��������� ������- ��,A B>&�&�%&��%&%'-
������ �$$����% 7�����C����-� -�� ;�-��- ����<-
''%+�$$+D?'$?E � � ���� ����� � &''$ 2������� � 3��#�� � � ���-
2**A �''%+�$$+D;'$<''')+�%

���- *� ������ ���� �� ������ ��� ���#�� � ��#����� ��� ����� .����� ����� ��� �� � ����� ��� �� ����� ������� ��� ,��� #������ F �� ���������� �� ����� �#������-
�� �� ,��� �� +' �0�������� �� �� ���� ��� ������ �������� ��� � 0������������ ���� ��� � "����#� G$H� �� ���� ��� ��# ������ �������� ����� ��0� ��� �� �������� �� �� ������- I��� G&H ����� � � +'������ ��#����� .����� � 0��� �� ������ ���� ��#���� �� �� �������� ��� ������ �� ��� )&'� ���� *�� �� G)H ���#� �� ���� �� ��� 6������� ��#����� .������ ���� �� ������ ���� ���� ��# +6� +6 ����� �- 4����� � ��- G+H ��� �� J������� �#��� � ���� ����� �� ������ +'������ ��� ����� ���� �� �>� �> � �#���1� �����, ����� � �> .������ �� �� ������ J�����������-
���� ���� ����� � ������� �������� ����� ��� �� ������� ������ � �� �� ������� ������ ��������� ��� � ��� �� ���� �� � +'������ ��#����� .����� ���� � ������ �� &>� &> � �#���1� �����, ������� �� ����� ��� �� ���#�� �� ������ ���� ��#����-�� ������� ��������� ��� � ��������� � @BB �� ���� � ,��� ���� � � �� )' �����0 �� ������ ��� ����� �� ����- ��� ���� �� ,����� �� ���#��� �� �������� ���#���� ���������-
� ��������� ���������� ���������
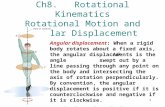
���- $ ����� � ������ ���� �� �� ���� ��� ������ ��������- �� ��, ����� ���� ���� ��� �� ������� �� �������� �� �� ��#�� �������� �� �� �� ����� ������� � � ��������� 7���- �� ������ �� �� ����� ��� �� �� ����� �� ��� �� ��� ���� �� ��� ����� �$ �� �$� ��� ��#� - �� � ��� �� ������� # ��� � � ��� �� ����� � ��� ��������� # ��� � � �����- �� ������� # ��� � ��� ��� �� �� ���� �� �� ����� �� ����� ������� � �� ��� ��- 8��� ��# �� ������ �� ������ ������� .������ ��������� �� �� ������� �� ����� ���� �� � � �� �� �� �������A
��� �� � ������ �� � �� � & � � &� � � � � � �$�
��� � &$� �&�
��� �� �� �� �� ���� �� � �� � ��������� �����,- K��� @� � 1� ������� G6H� � � �,����� ��
� � �� ���$�� ��� �)���� �� �� )� ) ����� �����, �� � �� � �������� )� ) ��� � ����� �����, ���� �������� ��������� ���� � �
� �' ��) �&�) ' ��$��& �$ '
��
��� �+�
����������� 3.- ;+< ��� 3.- ;)< ����
$'=+ &'�(' )��� *'��' � �� + ��� ����� ��$ ��� ��� & ��� ! ,-##�. �#" /�#0�

� � ��$$� �&$ � �&& � �&) &��$�& � �)� &��)�$ � �&�&��$�& � �)� $� �&$ � �&& � �&) &��&�) � �$�&��)�$ � �&� &��&�) � �$� $� �&$ � �&& � �&)
��
��� �6�
��� � � $� �&$ � �&& � �&)- 8��� �� ������ ;&<� 3.- ;$< � � ,���� ��
&�� ���� &�� �� &�� �� � �� � � �� � � &
� &$ � '� � &� � � � � �� ���
9������� �� ��������� �������� ��� �� # ��� � � ��$� �&� �)��� �� ��, 3.�- ;&< �� ;�< ���� �� ���� ��������� # ��� � �� �� # ��� �- ��� #������� ������ � ������ ������� �� ������� �� �� ��#�� �������� ��� ��# ��,��� �����-
� �������� ����� ���
��� ��� F �� ������� ��� ���� ����� ��������� # ��� � � � ������ � �� �������G)��H
� � ���� �=�9 ������ 3.- ;�< � � ������ �� ������� ���� ��#��� � ���
�� �� �� �� �� �� �$
&�� �� � �� � � &
� &$
� � '� � &� � � � � �� �>�
���- $- �� ���� ��� ������ ��������-
&'�(' )��� *'��' � �� + ��� ����� ��$ ��� ��� & ��� ! ,-##�. �#" /�#0� $'=6

���� 3.�- ;)< �� ;=<� � ����� �� �������� .�����
�� ���� �� ��� � �� �%�*� � �� � � ���� ��� ���� �� � � � �� �� ���� 3.�- ;>< �� ;%< � � ������ � �����, ���� ���������
�� �
�&$ �&& �&) ��&$ ��&& ��&) �&�)$ �)& �)) ��)$ ��)& ��)) �)�+$ �+& �+) ��+$ ��+& ��+) �+�6$ �6& �6) ��6$ ��6& ��6) �6��$ ��& ��) ���$ ���& ���) ��$ ��) �& �$ ��) �& '�) $ ��$ �) �$ ��$ '��& �$ $ ��& �$ �$ '
������������
������������
� � �������$
����������
����������� �� �$'�
���
� � ��� �� �$
&�� �� � �� � � &
� &$
�� � &� � � � � � �$$�
�� �� �� �� ; � &� � � � � �� � � $� &� )< �� �� ��� ������ �� # ���� � �� �-
'�' 1�������� ��������� �� ��� �-� ��$ � ���
�� ��������� �������� � �� � � 3.�- ;&< �� ;$'< � � ������� ��#�� �� ��� ������� � �$� �&� �� �) �� � ��� � �� �� ��� ��� ���#�� � ��#����� .����� ���� � ��#���1� ����� G=H- L ��� �� ��/ �� �� 0�� � �#���1� �����, �� ����� ���� � �������� � �� �.���� �� ���# � ���� �� ���������� �������� ��� ������ ���� �� �� ���������� �� ����� � �� �����,- I������ �� ���# �������� ��� ������ ����� �� ��������� ��/� � �#���1� �����, ��� �� �� ���� �� �� ������ �-
'�'�' & ��� ��������� � , � �� -� . $����� 2@������� 3.- ;$'< �� � ���� � ��� � ��, ����� �� � � �� ��� ��� �� �� �� ��������
�� =� = ����� �� �� >� = �����, � ������ � /�� ��� �� ,��� �� � �������- *� � ���� ���� ������ �� �� ��� �.��� ����� � ����� � ���#�� ���� =��� �� >�� ���� � � ����� � �� 3.- ;$'<� �� �������� ��� ��� ������ � �$� �&� �� �) �� ������ ���� ���������/����-
�$��$� �&� �)�
�'�����+� ����'�����)����� +
�$����$��&�
�) �
�'�����+� ��'�����)
��� +
�$���$��& � '� �$&�
�&��$� �&� �)�
���'�����)� ��'�����+����� +
�&����$��&�
�) �
�'�����)� ��'�����+
��� +
�&���$��& � '� �$)�
�)��$� �&� �)�
���'�����)� ��'�����+����� +
�)����$��&�
�) �
���'�����)
��� )
�)���$��& � '� �$+�
$'=� &'�(' )��� *'��' � �� + ��� ����� ��$ ��� ��� & ��� ! ,-##�. �#" /�#0�

��� ����� �� � $� &� )� �� ��� ������ ����� � ���� ���� �� � �� �� �F ������� �� � $� &� )� �� �� ������ .������ ���� ��� � �� �$ �� �& �� ������� �� ����� �� �)-9� �� �� 3.�- ;$&<�;$+< �� ��� +������ ��� ������ � �$� �&� �� �)� ��� ��� �� � +������ ���� ���� ��� � �� �$ �� �& � 3.- ;$+<-
'�'-' ��3 ��������� � , � �� � � � � !. $����� !* ������� �� 3.�- ;$&<�;$+<� ��� ������ � � �� ��� ��� ������ ���� �M � 3.- ;&<- *� �
�� � � �� �� ���� ) ���� �� � �� 3.- ;$'< � ���� ������ ���� �� 0��� 6 ����� ��� ����� ���� ������� �� �� = �F �� �����, �� � ����� � � ������ ���� �� �#�� ������� ���� � ��� ;$'<- 3� � �� ���� ����������� ���#��� � �� �� � ����� ������� ��� �� � � ���� �� �$� �&� �� �)- ����������� �� ��� ��# �������� �� � ��� 3.- ;&< ���� �� ���������� ��� ��� ������ �� ��� � � �$� �&� �� �) ���� ��������/����-
�$��$� �&� �)�
�'�����+� ����'����������� �
�$����$��&�
�) �
�'�����+� ��'������
��� �
�$���$��& � '� �$6�
�&��$� �&� �)�
���'������� ��'�����+����� �
�&����$��&�
�) �
�'������� ��'�����+
��� �
�&���$��& � '� �$��
�)��$� �&� �)�
���'������� ��'�����+����� �
�)����$��&�
�) �
���'������
��� �
�)���$��& � '� �$=�
* ���� �� �� ����� ��� ��� ������� � � �� �� �������� .������ ����� �� 3.- ;%<
$ $ '
$ ' $
' $ $
���
��� � � ���� �� ���� � �� �$>�
�� �� ���� ) ���� �� �� �F �� �����, � �� 3.- ;$'< �� ���� � �
$� �) $� �) �& � �$ �$� �) �$� �) �& � �$ '
$� �& �$ � �) $� �& �$� �& �$ � �) �$� �& '
�) � �& $� �$ $� �$ �) � �& �$� �$ �$� �$ '
���
���� �$%�
���� �� ���� �����,� � � ����� �� �������� ��� ������ � �� ��� �� �� � ��� ���3.�- ;$6<�;$=<-
����$� �&� �)�
�����'����������� �
������$��&�
�) �
���'������
��� �
�����$��& � '� � � +� 6� �� �&'�
��� ����� �� � $� � � � � �� � 3.�- ;$6<�;$=< �� ;&'< �� ��� ������ ����� � ���� ������ � �� �� �F ��� ���� �� � $� � � � � �� �� �� ������ .������ �� ������� �� ����� ���)-
&'�(' )��� *'��' � �� + ��� ����� ��$ ��� ��� & ��� ! ,-##�. �#" /�#0� $'==

'�' ' & ��� ��������� � , � �� -� . $�����$ �� � , � �� -� . ��$ � , � �� -.���� 3.�- ;$&<�;$+<� �� �������� ��� .������ � � ���#�
��$��$��&��)��&��)�)'��)��&�)'�
�'�$�&� ����'�����+
�����+
��$����$�
�&�
�)�
�'�$�&� ��'�����+
���+
��$���
$�
�&�'� �&$�
��&��$��&��)��$��)�')��)��$�')�
���'�����+� ��'�$�&
�����+
��&����$�
�&�
�)�
�'�����+� ��'�$�&
���+
��&���
$�
�&�'� �&&�
��� ������ �� � $� &� �� ��� ������� �� ����� �� � $� &� �� ������� �� ������ �� �)-
8��� �� ����� �� ���#�� �� 0# ������� ���� �$���& � � '� � � � � +� ���� 3.- ;$6<� �
����� �& � �$�& � �& � �&&� ��$ � �&$� �
�$ � �$�&� ��
$ � �&&� �� �$ ������ � �� �������� �����,����
�$�$ �
��& � �$�& �&�)$ �&�&& �&�$) �&�'+ '��& � �&& ' �&�)$ �&�&& �&�$) �&�'+
���$ � �&$ ��
$�&& ��$�$) ��
$�'+ ' '���
$ � �$�& ' ��$�&& ��
$�$) ��$�'+ '
���$ � �&& ' ' ��
$�&& ��$�$) ��
$�'+
��$ �$�+& �$�)) �$�&+ �$�$6 �$�'�
�����������
�����������
$�+$�
&&
�)$�)&
�&$�+&
�$�6&��&
��������
��������� �� �&)�
���
��& �
���'�����)��� )
�&���$��&�
���$ �
�'�$�&� ��'�����)
��� )
��$���
$�
�&�
��$ �
�'�����+� ��'�����6��� 6
�$���$��&� �&+�
�������� � � ���� �� .������ �$ � �&$� �$ � �$�&� ��& � �&$� �
�& � �$�&� ��
& � �&&� �� �& � ���������� �����, ���� � ���� �� ���# �� 0# ������� ���� �$�
��& � � &� � � � � �� ���� 3.-
;$�<
�&�& �
��$ � �&$ �$�+' �$�)$ �$�&& �$�$) '��$ � �$�& ' �$�+' �$�)$ �$�&& �$�$)
���& � �&$ ��
&�+' ��&�)$ ��
&�&& ' '���
& � �$�& ' ��&�+' ��
&�)$ ��&�&& '
���& � �&& ' ' ��
&�+' ��&�)$ ��
&�&&
��& �&��' �&�6$ �&�+& �&�)) �&�&+
�����������
�����������
$��$�6$�&�+$�
&&
�)$�)&
�&$�+&
��������
��������� �� �&6�
���
��$ �
���'�����)��� )
�$���$��&�
���& �
�'�����)� ��'�$�&
��� )
��&���
$�
�&�
��& �
�'�����6� ��'�����+��� 6
�&���$��&� �&��
��� �� ,��� �� � ������� �� �� ��� ��# ���� � ���� ;&)< �� ;&6<� ���� �� ���������� �� �F �� ����� � �$ �� �& ������ � /��� ��� � ���� �� ��� ��� ������ �� ���������� ����
$'=> &'�(' )��� *'��' � �� + ��� ����� ��$ ��� ��� & ��� ! ,-##�. �#" /�#0�

�$��$� �&� �)� ����$� �
�'�����+� ��'�����6� ��'��������� 6� ����� �
��$����$�
�&�
�) �
�'�����+� ��'�����6
��� 6
� �$���
$�
�& � '� �&=�
�&��$� �&� �)� ����&� �
�'�����6� ��'�����+� ��'��������� 6� ����� �
��&����$�
�&�
�) �
�'�����6� ��'�����+
��� 6
� �&���
$�
�& � '� �&>�
��� ������ �� � $� &� �� ��� ������� �� � ���� �� � $� &� �� ������� �� ������ �� �)- 9� ��
�� ���� �� ��� ������ ;&=< �� ;&>< �� 6������ ���� ��� � �� �$ �� �&-L ���� �� .������ �$� �&� �
�$� �� ��
&� �� 6������ ���� �$�6�& � � '� � � � � +� �� �$ �
� ���#�- *� � ���� �� .�������$ � �$��& � �&���$ � �$���
$ � �&���& � �$���
& � �&� ���$
� ���� �� �������� ���� � ��� � � ������
�)�) �
��$ � �$ �$�+' �$�)$ �$�&& �$�$) ' '��& � �& ' ' �&�)$ �&�&& �&�$) �&�'+
���$ � �$ ' ' ��
$�&& ��$�$) ��
$�'+ '���
$ � �& ' ' ' ��$�&& ��
$�$) ��$�'+
���& � �$ ��
&�+' ��&�)$ ��
&�&& ' ' '���
& � �& ' ��&�+' ��
&�)$ ��&�&& ' '
��$ ' � �$�+$ � �
$�)& � �$�&) � �
$�$+ � �$�'6
�����������
�����������
$�6$�+$�&�)$�
&&
�&$�)&
�$�+&�6&
����������
����������� �� �&%�
���
��$ �
�'�����+� ��'�����+��� +
� �$���
$�
�& � '� �)'�
�� ������ ��� �� ,��� �� � ������� �� 3.- ;&%< ���� �� �������� ��� ����� �� ���+ ���� ��� � �� �$ �� �&
�)��$� �&� �)� ����)� �
���'�����+� ��'����������� �
��)����$�
�&�
�) �
���'�����+
��� +
� �)���
$�
�& � '� �)$�
��� ��)��� �� ��� ������� �� � �)�� �� ������� �� ��)��� �� �)-
'-' �������� � ���������� �������� �� �
* ���� �� ���# � ��#����� ��� ����� � �) ���� �� ���# .������ � � � $� &� )��� � � $� � � � � ��� �� � � � $� &� )�� � �� �.���� �� ����� � � � �#���1� �����, �������) �� - ��� ���� ������� �� ���� ����� �� �$�
�& � �� ���# .������� �� ������ �� ����
�����- ��� � ������ ����� ��������� ���� .������ � ������� �� �� ���# �� � ���������� ���� ����� �� �� �$ �� �&� �� ���� ��� ,��� �� �� ����� �����.������ �� ���� ����� G=H- ���� $ ����� �� ���� ����� �� � ��� � �� ��� ��#.������ ��������� �� ��� &> .������- �� #���� �)�)'$ �� �)�&$$ �� �� .������)�)'$�& � �$ � �)�&$$�& � �& � ���� $ �� �� ��� �F ��� �� �)$�) �� �&$�&�) �� �� .������) � 3.- ;$+<- �� ���� ����� �� ���� &> .������ �� �� &> ���� ����� �� ����
&'�(' )��� *'��' � �� + ��� ����� ��$ ��� ��� & ��� ! ,-##�. �#" /�#0� $'=%

���� �� ���� ��� �� .��� �� � ���� ��� � �� �$ �� �&- * �����, ����� ��� �� .������ �� ����� ��
� � �� �)&���� � �� �� &>� &> �F �� �����, ������ �� � ���� �)� �� �� �� &> ���# ��� �� ��� �� ���� ����� �� �$�
�& ; � '� � � � � �� � � '� � � � � �� � �� �<-
*� � � � �� ���� �� .������ �� ���� ����� ;���� ����� ��< �� 3.- ;)&<� ��������� � ���� ��� ��� ���� � ��� �� ��# � �������- ������� �� �������� ���������� � �����0�-
����� � '� �))�N��� �� ������ ;))< ��� �� ���� �� � +'������ ��#����� .����� �� �������
+'�'
��) � '� �)+�
��� � � � '� � � � � +'� �� ��� ������ ����� � ���� ���� �� - ���#�� 3.- ;)+< ��#� +'����� �� �) � �� ����, �����-
* �� ���� �& � �$ �� �& � �& �� ��� ����� �� �)�)'$�& � �$ � �)�&$$�& � �&� �� 0�� ���#����� ��� ������ ��� ��� ��# ��� �� +$������ �� �� ���� � �� ���� ��
��$ � �)�&$$�)�+'�'
��) � '� �)6�
��& � �)�)'$�)�+'�'
��) � '� �)��
��� � � � $� &� �� � � � '� � � � � +'� �� ��� ������- @������� �� �������� �� �������� �� �� �� ���� ����� �� 3.�- ;)6< �� ;)�<� �� �� ,� ���� ���� �� ��� � � ������� +' �� �������� � ���� �� .����� �)�)'$�& � �$ � �)�&$$�& � �&
���� $
2������ &> .������ ��������� &>� &> � �#���1� �����,
3.;�< 4��� �� ��� ������ ���� ��� � �� �$ �� �& ����
��������� ��� ��# #�������
N����
�� 3.�-
)�� +�� 6�� ���
�$� $ �$ �&$� �&& +
�&� $ �$� �& �&$� �&& 6
�)� $ �$� �& �&$� �$�&� �&& �&$�&� �$�
&&� �
)& %
�� � $� � � � � ��� $ �
�$� �$� �& &
��)�)'$�& � �$ � �)�&$$�& � �&�� $ $
�)� �$�& $
����� &>
$'>' &'�(' )��� *'��' � �� + ��� ����� ��$ ��� ��� & ��� ! ,-##�. �#" /�#0�

�)�)'$��$
� �)�&$$�)�+'�'
��)
�� �)�&$$��&
� �)�)'$�)�+'�'
��)
�
� ��)�)'$�$ � �)�&$$�&�+'�'
��) �+'�'
��) � '� �)=�
��� � � ��)�)'$�$ � �)�&$$�&��-
' ' 4��� �����������
L ���#�� � � ��� ���� �� �����, � � 3.- ;)&<� � � ��� �� ���� � ��� ������� �� &=� &> �F �� �����, �� &> ���� ����� ��- �� �'$�
'&�� $� �� ���� ��
� ��� � � ������ �� ���� .������ �� &= �����- ������� ��� �� +' ����� �� �) ���� ��#����� .����� ;)+<� � � ����� �� ��������� #���� �� �$ �� �& � ���#�� ����� ��# ���� � ����- ��� �� � ��������� �� #���� �� �$� �&� �� �) ��� �� ���� � ��������� � ���#�� � & ���� ���� � �� 3.- ;$'<� ��� �� #���� �� � �� ������- 8�����$� �&� �� � �� ��� �� ������� �� ���� ���� � ���� �� �)-
! �������� ��������������
�� ��������� ��� � �� ����� � � ����� ���� ������� :9�I3:9�*@9 G>H� ������������� � � ������ ������- * ���� ������� � � �� ���� ���� �����0� ������ ����0 �� ������� ��� � ������� @?@BB ������ �� ��,���� ���� �� ������ �� ����� $6� 2@ ���- I ����� ������ � ���� G%H �� )' ������ �� ������ �� �� ������� ������5�����-
�� � ����� �� ������ �� ������� ��� 3.- ;)+< � � ���� � ���� ���� �� ,������� �� ��� ����� �F ��� G)�$'H- L ���� �� �������� �� ����� � ����� � ������������ +$ ���������� �� �� #���� ��� �) � �� &>� &> � �#���1� �����, � 3.- ;)&<� � �� �� +$���� .������ �� ���#� ���� �� ����� �� �� +$ �F ��� �� �� ��#����� ��� �����-N��� ���#�� �� � ��� ���#��� �� #���� �� ��� �� �F ���� � ��� � � � ��# ���������� ��� � ���� ��� � ���� � �������� �#�� �� �� +$� +$ �F �� �����, �� ��
���� &
*��� ���� ��� 3,���� $
�� ��
$ G'� '� 'H G'� '� 'H $+
& G6� '� 'H G+� '� 'H $&
) G$&� �$6� 'H G>� ��� 'H $=
+ G$>� ��� )H G$)� �)� �6H $6
6 G&'� $� �)H G$+� 6� &H &)
� G$'� >� 6H G�� $'� )H $%
&'�(' )��� *'��' � �� + ��� ����� ��$ ��� ��� & ��� ! ,-##�. �#" /�#0� $'>$

���� )
�������� ��� 3,���� $
����- "�������� �������� � ����������� �������� �
�$ �& �) �� �� ��
$ �'-'6>' �'-%$6> �'-'&'$ �&-&'>$ �$-)�6> �$)-=6=$& $-+)6= �$-='�> �'-�=$� �-)==% '-=)&> �$&-++$)) �)-==�$ &-%=>) '-+>6) &-$'=� )-)+=& $)-+&%�
+ �'-)%=% '-+)'= '-6>'� �&-6%>$ �&->%== $)-++>&
6 '-�+&' '-$�+) '-=&== >-)6%� ��-+666 %-$>%)
� �'-6�'' �'-%>&& '-�'$� '-==&6 �$)-=&�' &-�+6=
= '-$>$= '-'+6+ �$-'��+ �->6=$ '-&>&$ $&-&'&6
> �-'+$% �+-�=$% &-%>$� $)-$')= �'-%%=$ +->&='
%�$' '-&+6> '-)&6&� �'-��%%�'-'$$%� '-$''% '-''=6� �)-+$6>�'-=&&'� +-$='$ '-6�)+� �$&-%6>+ '-)=$��
$$�$& '-)&='�$-'>&�� '-&�%+ '-&&66� '-')&6 '-$=>>� &%-+&6% +)-=)>'� $�-�'=& ))-'%+6� 6�-'$6$�)&-=>>+�
$)�$+ '-�&�%�'-&��+� '-&>=6�'-$$%+� '-'$==�'-$%'6� �&-�6=)�&=-6$++� $'-&$$+�&-)%$'� &%-$6>6�$-�='$�
$6�$� '-&+%� '->�)+� '-$+$&�'-)+6'� �'-$%&+�'-'='%� $)-6+&= &=-')&>� &%-=�$+�$>-&$6%� $=-$�+= $'-&666�
$=�$> '-'6$&�'-+%$=� �'-6'&��'-$='>� '-$+&> '-&$%&� $'-%+)) $=-$$%�� $+-%&++�%-�=%&� �$6-=)>+ &-=&6'�
$%�&' '-&$)=�'-$$'6� '-+6+)�'-&+>�� '-'+&��'-&%>+� $$-%>'+ &>-�=6+� $>-))$� 6-&&�>� &6-�=)+ %-�+%&�
&$�&& �'-&%�&�'-==%%� �'-%)++�$-'%$6� '->%=>�'-���+� $&-+>=��$-$)>6� �-%'+6 $-%'$'� '-�&$$ $-=6=$�
&)�&+ �'-'&)6�'-=%>%� '-$'$$�'-=>$+� �$-'')$�'-$$$=� &=-'+=��'-6))6� )=-$>'��)-$=$+� �)-'&&%�+)-=>'%�
&6�&� �'-$%>) $-'&'+� �'-+>='�'->%&=� '-'6%'�'-)'+%� %+-%'&+ 6)-%''+� >-=+=6 &%-$&=>� �6>-$>&% %&-&%6>�
&=�&> '-&)=��'->&$'� �'-$$'& '-6$6'� �'-�>$&�'-$=6%� �$&->$=��+-+�)6� $%->&&$�&-=+%'� �'-$+%' $>-&�>>�
&%�)' '-)=>��'-=+''� �'-&++& '-=%>+� '->6+'�'-'$=6� $�-&%6%�+-&6)%� �$$-+&>��$+->$>>� �$'-%=%& %-$$$6�
)$�)& �'-$%6%�$-'$+=� �'-'%+&�$-')+>� �$-'>=+�'-&')%� �'-=�)'�&-$>�%� �$6-&'�'�)&-6&=&� �)6-')=+ $+-$�+&�
))�)+ '-&6$+�'-��%$� �'-&&�=�$-'$$=� $-'6$%�'-&$&=� �$-&'6��&-)�6)� �&�-$'+= +-)=6�� �6-'+)��&&-'>$>�
)6�)� �'-++&&�'-$$)�� �'-&&>=�'-$&)%� �$-$�)%�'-'$)�� $&-&'�) '-��)+� '-$6&'�'-+$&+� �-%%)%�$-$+>>�
)=�)> �'-6$)> '-==6>� '-6=''�'->6)$� '->&%) '-&)6>� �+-$$=>�'-)>)=� +-=$=+�$6-$6$>� $%-%�%$ )-6''&�
)%�+' '-'+=��$-='&)� '-+>%' $-+6)+� �'-6%%$ '-%&'+� $&-%=)+ '-6+)$� �+-)6'=�&-'%+6� �+-%&$> )-&>)&�
$'>&
&'�(
')���
*'��
'� ��
+���
�����
��$��� ���& ���
!,-##�.�#" /�#0�

���� ��- ��� ���#�� � ��#����� ��� ������ � �� ��� � @��� :��� ������ G$$H �� ������� � ����� ���� ������� �� ���� � ��� -
" ��������� �#������
�'�' 5�������� �3����� �
��� �� �� �� �� ����� �� ������ �� �������� �� �� ��� ������ �������� ���� ����� &� �� +' �������� � �� ����, ����� �� �� �����- I��#�� �� � ���� ���� ��������� �� �������� � ��# �� >� �� ��� �� �� +' �������� �� > �� �� ��� �� ���� ����� )-
�'-' 5�������� �3����� -
4������1� ���� �� ���� ���� ������� +' ��� ������� G$&H �� ��� ��� �� � �� ,����-K��� � ���� �� ����� �� � ��� �� ���� �� ��� ������� �� �� ���� ��� ��������������� � ������ �� ���� � ���� +- 9� �� ,� ��� � ������ �� +' ��� �������� ����� ���� 6-
�� ����� �.���� ��� �� ����� ��� �� �������� � �� ������� ��������� �� ����� '-&6� � � 2@ ;2����***��'' :I/< �� ������ ������ ��������� ��� �� ������� �#�#������ ,�����-
$ ����������
���� ���� ����� � ������� �������� ����� ��� �� ������� ������ � �� �� ������� ������ ��������� ��� � ��� �� ���#� � +'������ ��#����� ��� ������ ��#�� �,������ �� ���� ���� �� &>� &> � �#���1� �����,- �� �� ����� �.���� ������� �� ������ �� ������ �.��� ����� �� �� ��������� ��� �� ����� ��� � ������ �� ��,����� ����������- * ���� ����� �� ��� � ������� � @BB ������ ���� �� ������ ����� �� )' ����0 �� ������ � ���� ���� �� �������� ��# ���� � ��� - :�� �� ��� ��������� ��� �� ,� �� �� �� �� ������� � ���� ������ #����� ���� ���� ��� �������� $��� � �� ���� ����-
���� +
*��� ���� ��� 3,���� &
�� ��
$ G'� '� 'H G'� '� 'H $
& G$-$'=%$6� '� 'H G'-6+&>'6� '� 'H '-�+6&=6
) G'-6+%'%+� '-=6�'�)� 'H G'-%6�%$%� �'-6&>%$6� 'H $-'>�&>+
+ G'-=)6'==� �'-&&)%)6� '-6&6%%$H G'-��6>>6� �'-)6)+>&� $-+'&6)>H $-6')+)%
6 G'-6$+$>>� �'-6&�'�)� �'-)�>+$>H G'-+=>)6%� $-$6>=+&� '-$'=�=&H $-&>$%))
� G'-6%'+=)� '-'%+=))� �'-&'6'$>H G�'-$)='>=� �'-&)6$&$� '-)6)%$)H '-==$'=$
&'�(' )��� *'��' � �� + ��� ����� ��$ ��� ��� & ��� ! ,-##�. �#" /�#0� $'>)

��%�������
G$H :- "����#�� 9�:3 �- : �- 4�- $$6 ;$%%)< &==�&>&-
G&H :-�- I��� � : �- :� �- ���� )$ ;$%%�< )�6�)>'-
G)H @- *� ��� �A 2�� ���� �� 9�:3 43�@%>? :3@I�6>%+� $%%>-
���� 6
�������� ��� 3,���� &
����- "�������� �������� � ����������� �������� �
�$ �& �) �� �� ��
$ �&-=�&%)$$ �'->&$%+6> �'-'>+>'�> '-+>+�$$� �'->=)%)+= �'-')=&==%& �$-�))�+%% �'-=66=$+$ �'-+%=�&)= '-++&$%>= �'-=$)+%+) �'-6+)+%+6) )-)>�)>)& �$-)+66=>) '-$&'6'+� '-6&$>+== '->$'=&'& '-&�6)++�
+ +-&=&+%=+ �$-$'''))= �'-)$'%+%6 '-6)%>+>+ '-�=>>+'� '-+%==)+)
6 �$-))�>6)' �'-+$=$+%> '-)''�+6) '-+==>%$6 �'-=>$'%>> �'-+'$>=�$� $-)6>'%>& �'-+%=$'+& '-))'%6'= '-+>%$&&& '-�%�&)'' �'-6&6)=%&= �$-)='�>�' �'-=))+=6' �'-�)&'6>6 '-++)')=6 �'-66>�&$6 �'-='$$>+�> �$-$�$)�>= �'-=$&%'�) �'-=6>$'$$ '-+6>=)++ �'-)=)+>'% �'->'�&=&$% �$-$&%++=% �$-$66�6>% '-=&�=>+) '-%$===>$ �'-$$$$=�& '-)>$&$&>
$' �$-%))%&%& �$-)%)%+=$ �'->�6+%$6 '-6)6�&%= �'-=6'')'& �'-)>�=$6>$$ �'-6'6%%)) �'-)$&>=$6 '->6%)&'> '-%>%$)&) '-$$��=$) '-'>%+=$)
$& �$-%)=$%�6 �$-++)%�%$ '-+�6&+6� '->')&�=> �'-&%�''=$ '-6$�>6�6
$) �$-''=$$&' �'-�%>6�++ �'->�%=�&� '-+>6+>'> �'-&''>$>' �'->6'>='6$+ $-&%�%$�' �'-'$=&6') �$-'��='�$ '-�)�$=%6 '-==$6)=& '-'$6)='%
$6 �'-)>�$+'6 �'-$)�=)$= '-%'$&>'$ '-%%)=&6> '-$$$=>6% '-'')�$&=
$� �'-=$'>+$) �'-�>$>)6> �$-$+%>%=% '-6>6%$'� '-$�$+%>) �'-=%+$&')$= �'-&6�=+>> '-'&&)&+) '-%+='$�& '-%%)6==) '-'=%��66 �'-'>')6%&$> �'-6')&=+� �'-�>=%&%= �$-)%))6$' '-�=%=%�) '-)+>'�'= �'-�+66+�%$% $-$=>>�)= �'-&&)6�+& $-)�>++>6 '-%�>'%+) '-&)�==)+ �'-'>&'+==&' �$-+6�%$�% $-��'+)$' �$-+&6)$�) '-�>%+$>) '-6%)�66> �'-+$6'�')&$ '-'%6&')' '-&>&&��+ $-''=&'�) '-%66>�>' �'-'+�%%6� �'-&%''$))&& '->6+��)+ &-�$=+$�� �&-6&$$=&) '-%%>%'$& �'-'+$6�+) �'-'&$�6$=&) '-+$>$�>= �&-6'%=+$� $-�%)'))> '->%$)=+% �'-'=%>&=' �'-++�$>&$&+ �'->+'6%&) �'-�>�)=%) �$-'$6++'6 '-6)+'')+ '-''�$=+' �'->+6+6%>&6 $-'��+$)� �&-$%>6>'+ $-6)+&+=6 '-=>$$''+ '-'�>=%>& �'-�&'�')=&� �'-)+)))�+ $-+'++')' $-%>&6>%= '-%')$=+$ �'-+$>++6+ '-'%6>$&'
&= �)-�6&+$>+ 6-')&='&& �&-='&>>&' '-='=%�)' '-�>6>�>+ �'-$�>++&=&> �$-%$>%)'' &-�+&$>%6 �$-=>'>�6$ '-=$%$)$& '-�))>>&6 �'-&>+�>'%&% '-66�'>)% '-&$+$6&� '-%$>$')� '->�))&6� '-''6�++) �'-6'+�$6')' '-=$%+'%% +-)'�)$66 �)-&=�+6)) '-%%%�&=6 '-'&�$=6> �'-''==&)=)$ �$+-�$''+)' $=-=$$=%6' �=-%+�$)'' '-��=6)$> '-=)>)$>' �'-'%�)===)& �>-''')%%% +->>�)=>% $$-')=6>%$ '->)&&>+= �'-&>&=6$> '-+=�>$�&
)) &)-&&)6'+� �>-)>=%$)) �&%-$6%6&=) '->&6'>'& �'-)$>%&6= '-+��+''&
)+ �$-+�%>+&� �%-$>%%+)+ 6-'>6%�>6 '-%%6)�=� �'-'6$$%%) '-'>$)=6�
)6 +-%)6&&'% �'->'''+%) ��-6)=$%)� '->66=�6� �'-))+�=%& '-)%+6)$6
)� $-)%=%&'6 $$-)$�%+$= �=-$>$++&> '-%%>6&=' '-')$&$=+ '-'++6'>>
)= �&-�>%=%&% &-+6$�&6) +-+&$=6&% '->6+)=�& �'-&%+&')' '-+&>)6&6
)> �+->'%%='' �'-&'�=�&& �=-$)=%)=& '-%%$�)&% �'-$&�%$%6 '-'&)%6�>
)% $�-)6�'&>6 �$-+>>�+=> $>-'%>+>)� '->=''==6 �'-+6$$&&' �'-$%>�)'6+' �+$-='>=)�6 $-+�6=&�% �6)-%''%))� '-%6>'%>& �'-&>+')>= �'-')='$$�
$'>+ &'�(' )��� *'��' � �� + ��� ����� ��$ ��� ��� & ��� ! ,-##�. �#" /�#0�

G+H 9- 4������ 9- 9������ 4- ������ �A 2�� ���� �� 9�:3 43�@%>? :3@I�6%�%� $%%>-
G6H O- L������ L- "���� ������ �� ������ �� N�����I������ N� ����� ��- %�$$-
G�H 4- ��/���� @����������� ������ �� ����� 9 ���� 2��������� 4���� ��� $%%)� ��- $=6�$>$-
G=H :- "����#�� L- "���� 9�:3 �- : �- 4�- ;�� ��� 6'�� 9�#���� 4��� *���< $$= ;$%%6< =$�=%-
G>H �- 8������� �� :������� � L���� ����� �-� 8������ :���� @������� K�#���� 2���� @�������� $%%�-
G%H �-:- L������ ���������� ������ � ����A??���-����-��- ��?����?�������&?����������-����-
G$'H 9-J- 3���� ;3�-<� :��� ������ �A 4#������ � �� ���� ���� ����� 8�� � N� ����� ��- +6$�+='-
G$$H �-�- :������ @��� :��� ������ � ����A??����--�����-�?������ ?��,-����-
G$&H 2- 4������� 9�#� � � "���� ������ � =�$�� ����� 9 ���� 2��������� 4���� ��� $%%>-
&'�(' )��� *'��' � �� + ��� ����� ��$ ��� ��� & ��� ! ,-##�. �#" /�#0� $'>6