Mobile Robot Kinematics
54
Mobile Robot Kinematics داری ی ق ری ی ش د ی ع س ر کی د ل ص ف3 اب ی کAmirkabir University of Technology Computer Engineering & Information Technology Department ک ی ت ما ن ی س
description
Amirkabir University of Technology Computer Engineering & Information Technology Department. Mobile Robot Kinematics. سینماتیک. دکتر سعید شیری قیداری & فصل 3 کتاب. Kinematics. سینماتیک. معمولا مطالعه سینماتیک نقطه شروع استاندارد درس روباتیک است . - PowerPoint PPT Presentation
Transcript of Mobile Robot Kinematics

Mobile Robot Kinematics
قیداری شیری سعید دکتر
کتاب 3فصل
Amirkabir University of TechnologyComputer Engineering & Information Technology Department
سینماتیک

Kinematics
درس استاندارد شروع نقطه سینماتیک مطالعه معموال. است روباتیک
نظیر علوم سایر در روباتیک بر عالوه سینماتیک. دارد کاربرد نیز انیمیشن و گرافیک
سینماتیک: روبات حرکت هندسه تحلیلی مطالعه از است :عبارت
ثابت مختصات محور یک به نسبت حرکت باعث که گشتاوری یا و ها نیرو به نسبت
میشوند
سینماتیک

Forward kinematics
Given joint variables
End-effector position and orientation, -Formula?
),,,,,,( 654321 nqqqqqqqq
),,,,,( TAOzyxY x
y
z
روباتهای برای سینماتیک بحثصنعتی

روباتهای برای سینماتیک بحثصنعتی
مستقیم سینماتیک بحث درارائه روشی صنعتی روباتهای
ها لینک جهت و موقعیت که میشوداز تابعی بصورت را روبات ابزار و
به نسبت ها مفصل متغیرهای. میکند محاسبه مرجع محور
به مختصاتی فریمهای اینکار برایوصل روبات مکانیزم از بخش هر
این بین ارتباط سپس و شده. میشود بیان محورها
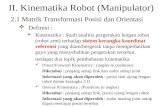
A 3-DOF Manipulator Arm

Given a desired position (P) & orientation (R) of the end-effector
Find the joint variables which can bring the robot the desired configuration
),,( 21 nqqqq
x
y
z
برای معکوس سینماتیک بحثصنعتی روباتهای

Inverse Kinematics
(1 … n) (x,y,z,x,y,z)
K-1

است مستقیم سینماتیک از تر سختزیرا:
و بوده خطی غیر حاصله معادالتحل راه همیشه اینرو از
آنها حل برای سیستماتیکی.closed formبصورت ندارد وجود
. نیست بفرد منحصر حل راه مشخصات به بستگی حل راه
دارد !solutions 2روبات
برای معکوس سینماتیک بحثصنعتی روباتهای

Forward and Inverse Kinematics
xw
Joint 1
Joint 2
Joint 3
Link 1z1
World (Base) Coordinate Frame
Tool Coordinate Frame
Joint 1
Joint 2
Joint 3
Link 1z1
World (Base) Coordinate Frame
Tool Coordinate Frame
1
2
zw
yt
zt
Link Space
n variables (1 … n)
Tool Space
6 variables (x,y,z,x,y,z)
Forward K
Inverse K

برای معکوس سینماتیک بحثصنعتی روباتهای

متحرک روباتهای سینماتیک
زمینه دو در متحرک روباتهای سینماتیک مطالعه: است الزم
نظر مورد عمل انجام برای روبات مناسب طراحی شده ساخته روبات کنترلی افزار نرم نوشتن
صنعتی روبات و متحرک روبات بین مهم اختالف یک . در صنعتی روبات است موقعیت گیری اندازه در
نسبت آنرا موقعیت میتوان لذا است ثابت نقطه یک. گرفت اندازه ثابت نقطه این به

روبات یک موقعیت کنترل
موارد تا است الزم روبات یک موقعیت کنترل برای: بدانیم را زیر
/ روبات دینامیکی سینماتیکی مدل زمین و چرخ بین تعامل مدل: نیاز مورد حرکت از تعریفی
- موقعیت کنترل سرعت کنترل. میکند برآورده را الزم نیازمندیهای که کنترلی قانون

مختصات تبدیل
عالقمند معموال روبات یک موقعیت بررسی هنگاممحور یک به نسبت آنرا موقعیت که هستیم
. بسنجیم مرجع مختصات ،چرخها نظیر روبوت یک اجزای حرکت حالیکه در
و سنسورها، گرفتن قرار بدنه غمحل به نسبت یره . میشوند گیری اندازه روبات
اهداف ویا روبات موقعیت تا است الزم اینرو ازگیری اندازه روبات موقعیت به نسبت که را دیگر
. نمود بیان مرجه مختصات محور به نسبت میشوند بود خواهد مختصات تبدیل به نیاز اینکار برای

Let and be arbitrary vectors in and be the angle from to , then
Where is the angle between the vectors and is the norm.
X.Y=0 if X is perpendicular to Y.
3R
cosyxyx
x yx y
x
y
x
خارجی ضرب

Mutually perpendicular
Unit vectors
Properties of orthonormal coordinate frame
0
0
0
jk
ki
ji
1||
1||
1||
k
j
i
i
jk
O
خارجی ضرب

Point represented in OXYZ:
zyx kji zyxxyz pppP
Tzyxxyz pppP ],,[
Vector represented in OXYZ:
x
y
z
P
O, O’i
jk
بردار و نقطه نمایش

Reference coordinate frame OXYZ
Body-attached frame O’uvw
wvu kji wvuuvw pppP
x
y
z
P
u
vw
O, O’
zwyvxu pppppp
Point represented in O’uvw:
Two frames coincide ==>
مختصات تبدیل

باشیم داشته دوران فقط که حالتی
wvu kji wvuuvw pppP
x
y
zP
zyx kji zyxxyz pppP
uvwxyz RPP u
vw
مختصات تبدیل
داد؟ ربط هم به را مختصات محور ایندو نقاط مختصات میتوان چگونه

Px , Py , and Pz represent the projections of P onto OX, OY, OZ axes, respectively
Since
wvux pppPp wxvxuxx kijiiii
wvuy pppPp wyvyuyy kjjjijj
wvuz pppPp wzvzuzz kkjkikk
wvu kji wvu pppP
ساده دوران حالت

Basic Rotation Matrix
Rotation about x-axis with
w
v
u
z
y
x
p
p
p
p
p
p
wzvzuz
wyvyuy
wxvxux
kkjkik
kjjjij
kijiii
x
z
y
v
wP
u
CS
SCxRot
0
0
001
),(

Basic Rotation Matrix
Rotation about x axis with
cossin
sincos
cossin0
sincos0
001
wvz
wvy
ux
w
v
u
z
y
x
ppp
ppp
pp
p
p
p
p
p
p
x
z
y
v
wP
u

Basic Rotation Matrices
Rotation about x-axis with
Rotation about y-axis with
Rotation about z-axis with
uvwxyz RPP
CS
SCxRot
0
0
001
),(
0
010
0
),(
CS
SC
yRot
100
0
0
),(
CS
SC
zRot

Basic Rotation Matrix
Obtain the coordinate of from the coordinate of
uvwxyz RPP
wzvzuz
wyvyuy
wxvxux
kkjkik
kjjjij
kijiii
R
xyzuvw QPP
TRRQ 1
31 IRRRRQR T
uvwPxyzP
<== 3X3 identity matrix
z
y
x
w
v
u
p
p
p
p
p
p
zwywxw
zvyvxv
zuyuxu
kkjkik
kjjjij
kijiii
Dot products are commutative!

Example
A point is attached to a rotating frame, the frame rotates 60 degree about the OZ axis of the reference frame. Find the coordinates of the point relative to the reference frame after the rotation.
)2,3,4(uvwa
2
964.4
598.0
2
3
4
100
05.0866.0
0866.05.0
)60,( uvwxyz azRota

Composite Rotation MatrixA sequence of finite rotations
Matrix multiplications do not commute
Rules:If rotating coordinate O-U-V-W is rotating about principal axis of OXYZ frame, then pre-multiply the previous (resultant) rotation matrix with an appropriate basic rotation matrix
If rotating coordinate OUVW is rotating about its own principal axes, then post-multiply the previous (resultant) rotation matrix with an appropriate basic rotation matrix

Example
Find the rotation matrix for the following operations:
Post-multiply if rotate about the OUVW axes
Pre-multiply if rotate about the OXYZ axes
...
axis OUabout Rotation
axisOW about Rotation
axis OYabout Rotation
Answer
SSSCCSCCSSCS
SCCCS
CSSSCCSCSSCC
CS
SCCS
SC
uRotwRotIyRotR
0
0
001
100
0
0
C0S-
010
S0C
),(),(),( 3

Coordinate Transformations• position vector of P in {B} is transformed to position vector of P in {A}
• description of {B} as seen from an observer in {A}
Rotation of {B} with respect to {A}
Translation of the origin of {B} with respect to origin of {A}

Coordinate Transformations
Two special cases
1 .Translation onlyAxes of {B} and {A} are
parallel
2 .Rotation onlyOrigins of {B} and {A} are
coincident
1BAR
'oAPBB
APA rrRr
0' oAr

Homogeneous Representation• Coordinate transformation from {B} to {A}
• Homogeneous transformation matrix
'oAPBB
APA rrRr
1101 31
' PBoAB
APA rrRr
10101333
31
' PRrRT
oAB
A
BA
Position vector
Rotation matrix
Scaling

Homogeneous Transformation
Special cases1 .Translation
2 .Rotation
10
0
31
13BA
BA RT
10 31
'33
oA
BA rIT

Example
Translation along z-axis with h:
1000
100
0010
0001
),(h
hzTrans
111000
100
0010
0001
1
hp
p
p
p
p
p
hz
y
x
w
v
u
w
v
u
x
y
z P
u
vw
O, O’
hx
y
z
P
u
vw
O, O’

Example
Rotation about the x-axis by
1000
00
00
0001
),(
CS
SCxRot
x
z
y
v
wP
u
11000
00
00
0001
1w
v
u
p
p
p
CS
SC
z
y
x

Example Find the homogeneous transformation matrix (T)
for the following operation:
:
axis OZabout ofRotation
axis OZ along d ofn Translatio
axis OX along a ofn Translatio
axis OXabout Rotation
Answer
44,,,, ITTTTT xaxdzz
1000
00
00
0001
1000
0100
0010
001
1000
100
0010
0001
1000
0100
00
00
CS
SC
a
d
CS
SC

Homogeneous Representation
A frame in space (geometric interpretation)
x
y
z
n
sa
1000zzzz
yyyy
xxxx
pasn
pasn
pasn
F
),,( zyx pppP
101333 PR
F
Principal axis n w.r.t. the reference coordinate system

Homogeneous Transformation
Translation
y
z
n
sa n
sa
1000
10001000
100
010
001
zzzzz
yyyyy
xxxxx
zzzz
yyyy
xxxx
z
y
x
new
dpasn
dpasn
dpasn
pasn
pasn
pasn
d
d
d
F
oldzyxnew FdddTransF ),,(

Homogeneous Transformation
21
10
20 AAA
Composite Homogeneous Transformation Matrix
0x
0z
0y
10 A
21A
1x
1z
1y 2x
2z2y
?i
i A1 Transformation matrix for adjacent coordinate frames
Chain product of successive coordinate transformation matrices

Homogeneous Transformations
With respect to the universal frame , the position of is:

Homogeneous Transformations
This equation can be reduced in a very handsome way by introducing homogenous coordinates and transformation .

Minimal Representation of Orientation
101333 PR
F

متحرک روباتهای سینماتیک :منظور به روبات مکانیکی عملکرد توصیف و طراحیهدف
کنترل این با است صنعتی روباتهای به شبیه متحرک رواتهای سینماتیک
. نماید حرکت محیط در آزادانه میتواند متحرک روبات که تفاوت روبات موقعیت گیری یاندازه برا مستقیمی روش آن بر عالوه
از گیری انتگرال با زمان طول در باید را موفعیت و نیست. آورد بدست شده انجام های حرکت
. شد خواهد گیری اندازه در خطا ایجاد به منجر اینکار متحرک های روبات در جدی ازمباحث یکی مسئله این با مقابله
میباشد. سر بر چرخها که محدودیتهائی از باید روبات حرکت فهم برای
. نمود شروع میکنند ایجاد حرکت راه

روبات موقعیت دادن نشان
که باشد صلب جسم یک روبات که میشود فرضصفحه یک روی بر و گرفته قرار چرخها روی
. میکند حرکت متغیر دو با میتوان را روبات صفحه x,yموقعیت در
متغیر یک مشخص و آن جهت دادن نشان براینمود
y
x

روبات موقعیت دادن نشان
: میشود استفاده مختصات فریم دو از اینکار برای و مرجع مختصات فریم یکی دارد قرار روبات روی بر که محلی فریم دیگری
میشود دادن نشان زیر بصورت مرجع فریم
میشود داده نشان زیر بصورت روبات فریم
},{: YX IIO
},{ YX RR

روبات موقعیت دادن نشان
مرجع فریم و روبات فریم بین زاویه اختالف اگربا روبات (برابر فریم مبدا و x,yدرنقطه) Pبوده
در باشد داشته قرار مرجع فریم به نسبتمرجع فریم به نسبت روبات فریم اینصورت
. میشود داده نشان بصورتزیر
y
x
I

روبات موقعیت دادن نشان
در حرکت تا است الزم روبات حرکت توصیف برایروبات فریم در حرکت به مرجع فریم راستای
. زیر دوران ماتریس از اینکار برای شود نگاشت. میشود استفاده
داریم قبل شکل حالت برای مثال برای
100
0
0
)(
CS
SC
Rot
100
001
010
)( 2Rot
IR R )(

مستقیم سینماتیک مدل
:هندسی ابعاد و روبات چرخهای سرعت اگر هدفخواهد چگونه روبات حرکت باشیم داشته را آنرا
شعاع بود؟ با یک هر چرخ دو دارای زیذ شکل باندازه rروبات و نقطه lبوده بین Pاز وسط در که . با برابر چرخها سرعت دارد فاصله دارد قرار چرخ . q1,q2دو مدل اینصورت در میباشد
: بود خواهد زیر بصورت روبات مستقیم سینماتیک


مثال

مستقیم سینماتیک محاسبه
هر تاثیر میتوان مرجع فریم در روبات حرکت محاسبه برایبه را نتیجه و کرده محاسبه را روبات فریم در چرخها از یک
. مینمائیم منتقل مرجع فریم محور جهت در روبات که کنیم فرض باشد Xاگر حرکت در
نقطه حرکت چرخها Pسرعت از یک هر چرخش بازا: بود خواهد زیر بصورت
با را مولفه ایندو میتوان دیفرانسیلی درایو با روبات یک درنمود جمع هم
22
.
11
.
)2/1()2/1( rrrr xx

مستقیم سینماتیک محاسبه
مولفهy. بود خواهد صفر حرکت این مولفه محاسبه چرخ tبرای فقط اگر باشید داشته نطر در
در چرخش به چپ چرخ حول روبات کند دوران راست . نقطه ای زاویه سرعت آمد :Pخواهد با بود خواهد برابر
داریم چپ چرخ برای ترتیب همین بهl
r
21
1
l
r
22
2
l
r
l
r
rr
RI
22
022
)(
21
21
1
مدل روابط این ترکیب بابصورت روبات سینماتیکی
بود خواهد زیر

مستقیم سینماتیک محاسبه
زیر رابطه از دوران ماتریس مقدار رابطه این در. میاید بدست
مجبور روبات حرکت توصیف برای کلی حالت دربر چرخ هر که را هائی محدودیت تا بود خواهیم
. بگیریم نظر در نیز را میکند اعمل حرکت
100
0
0
)( 1
CS
SC
Rot