Erik Kaju - Enhancement of Real-time Video ProcessingPerformance - Reaalaja videotöötluse...
71
EESTI INFOTEHNOLOOGIA KOLLEDŽ Erik Kaju REAALAJA VIDEOTÖÖTLUSE JÕUDLUSE PARENDAMINE EESTI INFOTEHNOLOOGIA KOLLEDŽI ROBOOTIKAKLUBI BOTMASTER PLATVORMI BAASIL Diplomitöö INFOTEHNOLOOGIA SÜSTEEMIDE ARENDAMISE ÕPPEKAVA Juhendaja: Valdur Kaldvee Tallinn/Stockholm 2013
description
Reaalaja videotöötluse jõudluse parendamine Eesti Infotehnoloogia Kolledži Robootikaklubi Botmaster platvormi baasilEnhancement of Real-time Video Processing Performance based on Estonian Information Technology College Robotics Club Botmaster Platform
Transcript of Erik Kaju - Enhancement of Real-time Video ProcessingPerformance - Reaalaja videotöötluse...

EESTI INFOTEHNOLOOGIA KOLLEDŽ
Erik Kaju
REAALAJA VIDEOTÖÖTLUSE JÕUDLUSE PARENDAMINE
EESTI INFOTEHNOLOOGIA KOLLEDŽI ROBOOTIKAKLUBI
BOTMASTER PLATVORMI BAASIL
Diplomitöö
INFOTEHNOLOOGIA SÜSTEEMIDE ARENDAMISE ÕPPEKAVA
Juhendaja: Valdur Kaldvee
Tallinn/Stockholm 2013
AUTORIDEKLARATSIOON
Deklareerin, et käesolev diplomitöö, mis on minu iseseisva töö tulemus, on esitatud Eesti
Infotehnoloogia Kolledžile lõpudiplomi taotlemiseks Infosüsteemide arendamise erialal.
Diplomitöö alusel ei ole varem eriala lõpudiplomit taotletud.
Autor E. Kaju ..............................
(allkiri ja kuupäev)
Töö vastab kehtivatele nõuetele
Juhendaja V. Kaldvee ................................
(allkiri ja kuupäev)
2
Sisukord
Lühendite ja mõistete loetelu.....................................................................................................6
Sissejuhatus..............................................................................................................................10
1 Analüüs................................................................................................................................13
1.1 Botmaster platvormi tehniline spetsifikatsioon............................................................13
1.1.1 Tarkvara................................................................................................................13 1.1.2 Riistvara................................................................................................................13
1.2 Videotöötlus ning selle alamprotsessid........................................................................14
1.2.1 Botmasteri videotöötluses kasutatavad värviruumid............................................14 1.2.1.1 YUV..............................................................................................................14 1.2.1.2 RGB(BGR)...................................................................................................15 1.2.1.3 HSL...............................................................................................................16 1.2.1.4 Ühekanaliline binaarne pilt...........................................................................16
1.2.2 Videotöötluse elutsükkel.......................................................................................17 1.2.3 Initsialiseerimine..................................................................................................18
1.2.3.1 HSL värviruumi otsingutabeli genereerimine ning pikslite konverteerimine RGB ja HSL värviruumide vahel...............................................................................18 1.2.3.2 Videohaaramise struktuuri sidumine kaameraga .........................................19 1.2.3.3 Videohaaramise struktuuri seadistamine.......................................................20
1.2.3.3.1 V4L seadistuste rakendamine................................................................20 1.2.3.4 Andmeladu masinnägemise saaduste hoiustamiseks....................................21
1.2.4 Kaadri töötlemine.................................................................................................21 1.2.4.1 Kaadri hankimine..........................................................................................21 1.2.4.2 ROI (Region of Interest) määramine............................................................22 1.2.4.3 Videotöötlusel kasutatavad pildiobjektid ja nende väärtustamine ..............22
1.2.4.3.1 IplImage iseloom...................................................................................23 1.2.4.3.2 Img........................................................................................................24
3
1.2.4.3.3 Work......................................................................................................24 1.2.4.3.4 Binary....................................................................................................24
1.2.4.4 Gaussi filtri rakendamine..............................................................................24 1.2.4.5 Objektide tuvastamine..................................................................................26
1.2.4.5.1 Golfipalli näide.....................................................................................26 1.2.4.5.2 Objektide tuvastamise protsessi kirjeldavad joonised..........................27
2 Praktiline teostus..................................................................................................................30
2.1 Videotöötluse jõudluse mõõtmise vahendi ning metoodika väljatöötamine ...............30
2.1.1 Nõuded.................................................................................................................30 2.1.2 Ajatemplite salvestamine......................................................................................31 2.1.3 Lahenduse disain..................................................................................................32 2.1.4 Tööriista ning selle rakendusliidese kasutamine..................................................33
2.2 Mõõtmise teostamine esialgse platvormi videotöötluse komponendi jõudlusele........35
2.2.1 Tulemused.............................................................................................................36 2.2.2 Hinnang tulemustele ning prioriteetide seadmine................................................40
2.3 Platvormi videotöötluse jõudluse parenduse võimalike metoodikate ja lähenemiste
analüüs.................................................................................................................................41
2.3.1 Üldine ..................................................................................................................41 2.3.2 Hüpotees - Kaadri hankimine...............................................................................42 2.3.3 Hüpotees - Objektide tuvastus..............................................................................43 2.3.4 Hüpotees - Kujutise kuvamine.............................................................................43
2.4 Lahenduste realiseerimine............................................................................................43
2.4.1 Mitmelõimeliste lahenduste realiseerimise võimalused Botmaster platvormis. . .43 2.4.2 Kaadri hankimine – mitmelõimeline lahendus.....................................................46
2.4.2.1 Eesmärk........................................................................................................46 2.4.2.2 Kontseptuaalne lahendus..............................................................................47
2.4.2.2.1 Ülevaade................................................................................................48 2.4.2.2.2 Takistused..............................................................................................48
2.4.2.3 Teostus – Realiseeritud lahendus..................................................................49 2.4.2.3.1 Põhimõte ning iseloomustus.................................................................50 2.4.2.3.2 Lahenduse tehnilised tunnusjooned......................................................51 2.4.2.3.3 Lahenduse väljatöötamine, silumine ning testimine.............................51 2.4.2.3.4 Lahendusega kaasnevad kõrvalmõjud süsteemile.................................52 2.4.2.3.5 Analüüs platvormi parendatud videotöötluse komponendi jõudlusele – mitmelõimeline lahendus......................................................................................53
2.4.3 Kujutise kuvamine – süsteemi paremaks jõudluseks optimeeritud lahendus ......56 2.4.3.1.1 Analüüs platvormi parendatud videotöötluse komponendi jõudlusele – optimeeritud kuvamise lahendus (+mitmelõimeline lah.)....................................57
3 Edaspidised väljavaated.......................................................................................................60
3.1 Objektide tuvastus - binaarpiltide väärtustamise optimeeritud lahendus.....................61
3.2 Objektide tuvastus – mitmelõimeline lahendus...........................................................63
4

4 Lõputöö tulemus..................................................................................................................64
5 Kokkuvõte............................................................................................................................65
6 Enhancement of real-time video processing performance based on EIK robotics club
"Botmaster" platform...............................................................................................................67
7 Kasutatud allikad.................................................................................................................70
8 Lisad.....................................................................................................................................72
5

Lühendite ja mõistete loetelu
Ajatempel Sümbolite jada (timestamp), mis tähistab kuupäeva ja/või aega, mis on seotud mingi kindla sündmusega. [1]
Amdahli seadus (Amdahl's Law) Matemaatiline arvutusviis, mille abil on võimalik välja selgitada maksimaalne eeldatav programmi jõudluse tõus, kui täiustatakse ainult teatud osa süsteemist.
API Rakendusliides, programmiliides, API-liides. Arvuti operatsioonisüsteemiga või rakendusprogrammiga määratud reeglistik, mille alusel rakendusprogramm kasutab operatsioonisüsteemi või teise rakendusprogrammi teenuseid.[2]
ATmega (Atmel megaAVR)
Atmel firma poolt toodetav mikrokontrollerite seeria .[1]
AVI (Audi Video Interleaved)
Multimeedia konteineri formaat. Avi fail võib sisaldada nii audio kui video andmeid ning võimaldab sünkroonset audio+video taasesitlust.
Binaarpilt vt. Kahendkodeeritud kujutis
Botmaster EIK Robootikaklubi roboti pilditöötlemise- ning juhtimisplatvorm.
CSV Komaeraldusega väärtused. Failivorming, kus andmebaasikirjed on üksteisest eraldatud komadega. [2]
EIK Eesti Infotehnoloogia Kolledž.
EIK Robootikaklubi 2002 aastal asutatud EIK üliõpilaste organisatsioon, mille üks peamisi eesmärke on osaleda Robotex võistlustel ja abistada võistluste korraldamisel. [1]
FireWire (IEEE1394) Jadasiini põhimõttel töötav kiire isokroonne andmeside liides, mis võimaldab andmete edastamist reaalajas. [1]
6
Fps Tele- või videopildi kaadrisageduse mõõtühik - kaadrit sekundis. [2]
Gaussi filter Gaussi filter on ribapääsfilter, millel on kellukakujuline sagedustunnusjoon. Gaussi filtri rakendamisel digitaalsele kujutisele ühtlustatakse läheduses olevate pikslite väärtused.
Gcc GNU kompilaator, millega on võimalik kompileerida C, C++, Objective-C, Fortran, Java, Ada, Go ja mitmetes teistes programmeerimiskeeltes loodud programme. [1]
GNU projekt 1984. aastal algatatud projekt, mille eesmärgiks oli luua UNIX- laadne operatsioonisüsteem, mis sisaldab ainult vaba tarkvara (GNU ei ole UNIX). [1]
GPL (litsents) General Public License - on enim levinud vaba tarkvara litsents, mis loodi GNU projekti jaoks. [1]
HSL Värviruum, kus värvid on defineeritud värvitooni, küllastatuse ja heleduse järgi. [1]
Intel Atom Intel-i poolt toodetud madala voolutarbega protsessorite tootemargi nimi. Intel Atom protsessorid on kasutuses väikest mõõtu mobiilsetes nutiseadmetes, mis vajavad kõrget arvutusvõimsust.
Intel Image Processing Library (IIPL)
OpenCV eelkäija - Intel-i arhitektuuri jaoks optimeeritud C teek, mis võimaldas teostada tüüpilisi pilditöötluse operatsioone. OpenCV C teegi programmiliides on jätkuvalt osaliselt identne IIPL-iga. [3]
Just-in-time initsialiseerimine
Objekti või mooduli initsialiseerimine teostatakse alles siis, kui seda vajatakse esimest korda. Esineb ka “lazy initialization” nime all.
Kaamera indeks Igale USB jadasiini või teise arvuti porti ühendatud kaamerale omistatakse OpenCV teegisisene järjekorranumber, mille abil määratakse, millisest kaamerast pilti/videovoogu lugeda.
Kahendkodeeritud kujutis
Kujutise kahendkodeerimine (image binarization) on masinnägemise protsess, mille abil kujutise pildimaatriksi andmed kahandatakse kahe võimaliku väärtuseni – 1 ja 0. (must ja valge) [4]
Kosteaeg Kosteaeg (latency) on aeg, mis kulub info jõudmiseks sisendist väljundisse (andurite lugemise, planeerimine). [1]
Krominantsus PAL-laadsete televisioonistandardite värvisignaali kodeerimismudelitele iseloomulik kanal, mis määrab kujutise värvi.
Luminents PAL-laadsete televisioonistandardite värvisignaali kodeerimismudelitele iseloomulik kanal, mis määrab kujutise heleduse.
LUT (Lookup-table) Vt. Otsingutabel
Make Utiliit, mis täidab Makefile failis kirjeldatud reeglite alusel erinavaid tegevusi. Kasutatakse tarkvara kompileerimise korralduste
7

automatiseerimiseks ja lihtsustamiseks. [1]
Makefile Spetsiaalse formaadiga fail, mis koos make utiliidiga aitab kompileerida ja hallata projekte. [1]
Masinnägemine MV(Machine vision) - kõrgtehnoloogia, mille eesmärgiks on masinale vahendada analoogselt elusolendi silmaga väliskeskkonna objekte, analüüsida nende objektide olemust ja kujundada masina otstarbekat tegevust nende objektide suhtes.
Matrox Imaging Library (MIL)
Laialdane tarkvaravahendite kogum, mis on mõeldud masinnägemise, kujutiste analüüsi ja meditsiinilise pilditöötluse tarkvara arendamiseks. Teegid toetavad C, C++, C# ja VisualBasic® programmeerimiskeeli. [5]
Monotoonne loendur Taimerites ning ajatembeldamiseks kasutatav loendur, mille näit kasvab vaid monotoonselt ning ei vähene iialgi. Loenduri väärtust ei saa ka muuta. [6]
OpenCV Open Source Computer Vision (OpenCV) on vabatarkvaraline reaalajas videotöötlemiseks mõeldud teek.
Otsingutabel (lookup-table, LUT) on andmete tabel arvutiteaduses, kuhu on salvestatud mingi funktsiooni väärtused, et asendada jooksvalt nende arvutamine [4].
Ov534 Linuxi driver, mis toetab PS3 Eye USB kaamerat. Nimetus tuleneb Omnivision OV534 USB-siinikiibist, mida kasutavad paljud veebikaamerad.
PAL Faasivaheldusega liin (Phase Alternation Line) - on üks kolmest maailmas enamlevinud televisoonistandardist. [2]
piksel(px) Tuletis sõnadest "picture" ja "element" - väikseim digitaalse kujutise element (punkt).
Pikslisügavus Pikslitele iseloomulik võimalike väärtuste amplituud. Näiteks 8-bitine pikslisügavus tähendab, et pikslil võib olla 2^8=256 erinevat väärtust.
Pildimaatriks Kujutise andmete (pikslite väärtused) esitamine andmemaatriksina.
PlayStation Eye (PS3 Eye)
Sony Playstation 3 mängukonsoolile loodud veebikaamera. [1]
POSIX Portable Operating System Interface – Unix operatsioonisüsteemi liides, mis kirjeldab ära, programmide ja operatsioonisüsteemide omavahelise suhtluse. [1]
Qmake Programm, mis automatiseerib Makefile loomise. [1]
Qt Platvormiülene tarkvaraarenduse raamistik, mis põhineb C++ programmeerimiskeelel.
Qt-OpenCV- Avatud lähtekoodiga reaalaja videovöö töötlemise platvorm.
8

Multithreaded Realiseeritud projekt põhineb Qt4, ja OpenCV C++ teekidel.
Raalnägemine Vt. Masinnägemine
RGB (BRG) Värviruum, kus kõik värvid tulevad kolme värvikanali (punane, roheline, sinine) liitmisel. [1]
Ring aquisition Masinnägemises kasutatav tarkvara disainimuster, mille kohaselt üldjuhul on kasutuses mitu vahepuhvrit kaadrite hoiustamiseks ning pidev tsükliline kaadrite hankimine kaamerast on eraldatud ülejäänud süsteemist.
Robotex Alates 2001. aastast toimuv rahvusvaheline robotite võistlus, mida korraldavad Tallinna Tehnikaülikool, Tartu Ülikool ning Eesti Infotehnoloogia Kolledž.
ROI ROI määrab, millist ala video kaadri peal töödeldakse.
SECAM Mäluga jadavärvid (Sequential Couleur Avec Memoire) - värvitelevisiooni standard
Semafor Paralleelprogrammeerimises nimetatakse semaforiks kaitstud muutujat (abstraktandmetüüpi), mida kasutatakse multiprotsessorkeskkonnas juurdepääsu piiramiseks jaosmälule. [2]
Singleton Tarkvara disainimuster, mille kohaselt klassi kuuluva(te) objekti(de) arv on rangelt piiratud ühele ning on ainult üks globaalne ligipääsupunkt. [7]
SVN Apache Subversion – vaba platvormiülene versioonihaldustarkvara.
Tehisnägemine Vt. Masinnägemine
UNIX 1969. aastal loodud hargtöötlusega, mitut kasutajat toetav, raudvarast sõltumatu operatsioonisüsteem.
USB Universaalne järjestiksiin (Universal Serial Bus) on levinud arvuti välissiini standard.
V4L, V4L2 (Video For Linux)
Video salvestamise programmiliides Linux keskkonnale. Toetab laia valikut riistvaralisi seadmeid.
Värviruum (värvimudel)
Abstraktne matemaatiline mudel, mis kirjeldab värvide esitamist aritmeetiliste korteežide abil. Enamasti on kolm või neli väärtust või värvikomponenti.
Video for Windows (VFW)
Vorming video- ja audioinformatsiooni salvestamiseks. Sellele vormingule vastavad failid on varustatud laiendiga *.AVI. [2]
YUV Televisioonis PAL-süsteemi juures kasutatav video värvisignaali kodeerimismudel (värvusruum). Y on heledus, U ja V on värvsussignaalid. [2]
9
Sissejuhatus
Eesti Infotehnoloogia Kolledži Robootikaklubi (EIK Robootikaklubi) on Eesti
Infotehnoloogia Kolledži (EIK) üliõpilaste organisatsioon, mis tegutseb aastast 2002 [8].
Klubi missiooniks on robootika ning teaduse populariseerimine. Põhiline fookus on robotite
ehitamisel. EIK Robootikaklubi osaleb aktiivselt rahvusvahelistel robotivõistlustel.
Traditsiooniliselt on üks nendest iga-aastaselt Eestis toimuv rahvusvaheline roboti võistlus
Robotex [9]. Robotite ehitus ning võistluseks ettevalmistamine on tudengite jaoks
mitmekülgselt arendav tegevus, sest protsessi käigus õpivad üliõpilased oma matemaatika-,
füüsika-, mehhaanika-, programmeerimise- ja elektroonikaalaseid teoreetilisi teadmisi
praktikas rakendama. Robotite ehitamine on meeskondlik tegevus, kus efektiivse töö
eelduseks on tihe koostöö ning teadmiste jagamine. Meeskonna liikmetel kujunevad välja
kindlad rollid, spetsialiseerumine ning kohustused.
EIK Robootikaklubi on aastate jooksul arendanud ainulaadset roboti juhtimisplatvormi
Botmaster [10], mis on kasutusel enamusel EIK Robootikaklubi kõrgema taseme robotitel.
Platvorm on väga paindlik ning võimaldab juhtida üksteisest täielikult erineva mehaanika ja
funktsionaalsusega roboteid. Platvormi tuum jääb samaks, kuid juhtloogika kohandamise teel
on võimalik lahendada erinevaid ülesandeid. Botmasteri platvormil põhinevad robotid on
10

täitnud erilaadseid eesmärke nagu näiteks toa koristamine, linnamaastikul navigeerimine või
võrkpalli ja jalgpalli mängimine [8].
EIK Robootikaklubi Botmaster juhtimisplatvormiga robotid on saavutanud silmapaistvaid
tulemusi rahvusvahelistel robotivõistlusel ning on läbi aegade olnud favoriidid roboti
võistlusel Robotex [8]. Konkurentide tase on väga kõrge ning platvormi edu jätkamine eeldab
arendajate pühendumust, jätkuvat täiustamist ning edasiarendust. Prioriteetsemad eesmärgid
on teha platvorm kiiremaks ja töökindlamaks.
Tänaseks on saavutatud olukord, kus robotites kasutatavad mehaanilised komponendid
ning elektroonika võimaldaksid ülesandeid lahendada oluliselt kiiremini. Samas
Botmaster platvormi masinnägemise komponent on olulisel määral roboti summaarset
jõudlust piirav tegur.
Käesolevas diplomitöös lahendatav probleem
Videotöötlus on arvutusmahukas ning ajakulukas protsess ning mobiilsete robotite
arvutusvõimsus on limiteeritud. On tarvis leida lahendusi, mis võimaldavad olemasoleva
arvutusvõimsuse juures saavutada kõrgemat efektiivsust video töötlemisel.
Robotite liikumiskiirus on piiratud Botmaster platvormi masinnägemise komponendi
kosteaja poolt. Botmasteri videotöötluse komponent on kriitilise tähtsusega ning reaalajas
töödeldav videovoog on roboti puhul tähtsaimaks sisendiks ümbritseva keskkonna kohta.
Robot võtab kaamerast pildi, töötleb seda ning analüüsib tuvastatud objekte. Juhtloogika
tasandil võetakse analüüsi tulemuste põhjal vastu otsuseid, kuidas konkreetses situatsioonis
käituda. Ühe videokaadri töötlemiseks kuluva aja vähendamine võimaldab saavutada
märgatavalt kiiremat roboti reageerimisvõimet, suuremaid sõidukiiruseid, sujuvamaid ning
optimaalseid liigutusi.
Käesoleva diplomitöö eesmärgid
Analüüsitakse ning realiseeritakse meetodid "Botmaster" platvormi masinnägemise
komponendi jõudluse tõstmiseks.
11
Autori eesmärgiks on viia läbi põhjalik uuring Botmasteri videotuvastuse komponendile ning
pakkuda välja võimalusi süsteemi kosteaja vähendamiseks. Kaalutleda erinevaid
realiseeritavaid lahendusi ning valida neist välja sobivaimad. Kavas on realiseerida valitud
lahendus ja seada edasised plaanid platvormi masinnägemise komponendi arenduseks.
Käesoleva diplomitöö tulemus on suunatud eelkõige Botmaster platvormi kasutajatele ehk
roboteid arendatavatele EIK Robootikaklubi liikmetele, kes osalevad robootika võistlustel.
Soovi korral saavad lõputöö tulemusi ära kasutada ka teised, kes tegelevad reaalaja
videotuvastuse/töötluse efektiivsusega ning analoogsete kosteaegade vähendamisega.
Botmaster tarkvara on traditsiooniliselt olnud avatud lähtekoodiga ning EIK Robootikaklubi
jagab soovijatele programmide algtekste.
Diplomitöös sisalduvad peatükid
Sissejuhatusele järgnevas analüüsi osas annab autor ülevaate masinnägemise ja reaalaja
videotöötluse üldistest põhimõtetest. Tehakse ülevaade EIK Robootikaklubi Botmaster
platvormi ülesehitusest, tehnilistest iseärasustest ning funktsionaalsusest. Keskendutakse
platvormi videotöötluse komponendile. Lugejal tekib ettekujutus kogu tehisnägemise
protsessist alates geomeetrilisest optikast ning kujutise kandumisest kaamera
maatrikssensorile ja lõpetades digitaalselt pildilt füüsiliste objektide tuvastamiseks
kasutatavate algoritmidega raalnägemise rakenduses.
Autor analüüsib potentsiaalseid lahendusi eelnevalt püstitatud probleemile. Uurib
analoogseid lahendusi mujalt maailmast. Autor annab hinnangud ning prioriseerib erinevad
võimalikud lahendused ja otsustab sobivaimate kasuks.
Realiseerimise osa kajastab diplomitöö praktilist poolt. Autor tutvustab Botmaster platvormi
masinnägemise mooduli jõudlustestimiseks loodud metoodikat, annab ülevaate
arendusprotsessist ning võtab kokku tehtud töö. Samuti pannakse paika tulevikuplaanid
Botmaster platvormi videotöötluse komponendi edasiseks arendamiseks.
Kokkuvõttes antakse ülevaade tehtud analüüsist, tööst ja tulemustest.
12

1 Analüüs
1.1 Botmaster platvormi tehniline spetsifikatsioon
1.1.1 Tarkvara
• Platvormi tarkvara arendamiseks kasutatavad programmeerimiskeeled: C++, C
• Välised teegid: OpenCV 2.0 – C, Qt 4 – C++
• Haldamine: svn, make, qmake ja gcc
• OS: UNIXi-laadsed operatsioonisüsteemid (Linux Ubuntu 10.04)
1.1.2 Riistvara
• Platvormi tarkvara ühilduvus riistvaraga:
◦ Juhtarvuti: moodsate arvutite seas piirangud puuduvad (Intel® Atom™ D525)
◦ Mikrokontroller: paljud 8-bitised mikrokontrollerid. (ATmega seeria kontrollerid)
◦ Kaamera: kõik OpenCV poolt toetatud (Playstation Eye USB 2.0 + ov534 driver)
◦ Täiturid: lai valik servo- ning alalisvoolumootoreid ning muud elektrooniliselt
juhitavad komponendid.
◦ Andurid: lai valik analoog- ning digitaalandureid
NB! Sulgudes on märgitud antud diplomitöö arendamisel ning testimisel kasutatud komponendid. Edaspidi mõeldakse „Botmaster platvormi“ all vaid tarkvara.
13
1.2 Videotöötlus ning selle alamprotsessid
Süsteemi parendamiseks on kõigepealt vaja anda ülevaade tarkvara komponentidest ja
ülesehitusest. Antud peatükk annab lugejale ettekujutuse tüüpilistest põhimõtetest, mida
kasutatakse tehisnägemise funktsionaalsuste loomisel.
1.2.1 Botmasteri videotöötluses kasutatavad värviruumid
1.2.1.1 YUV
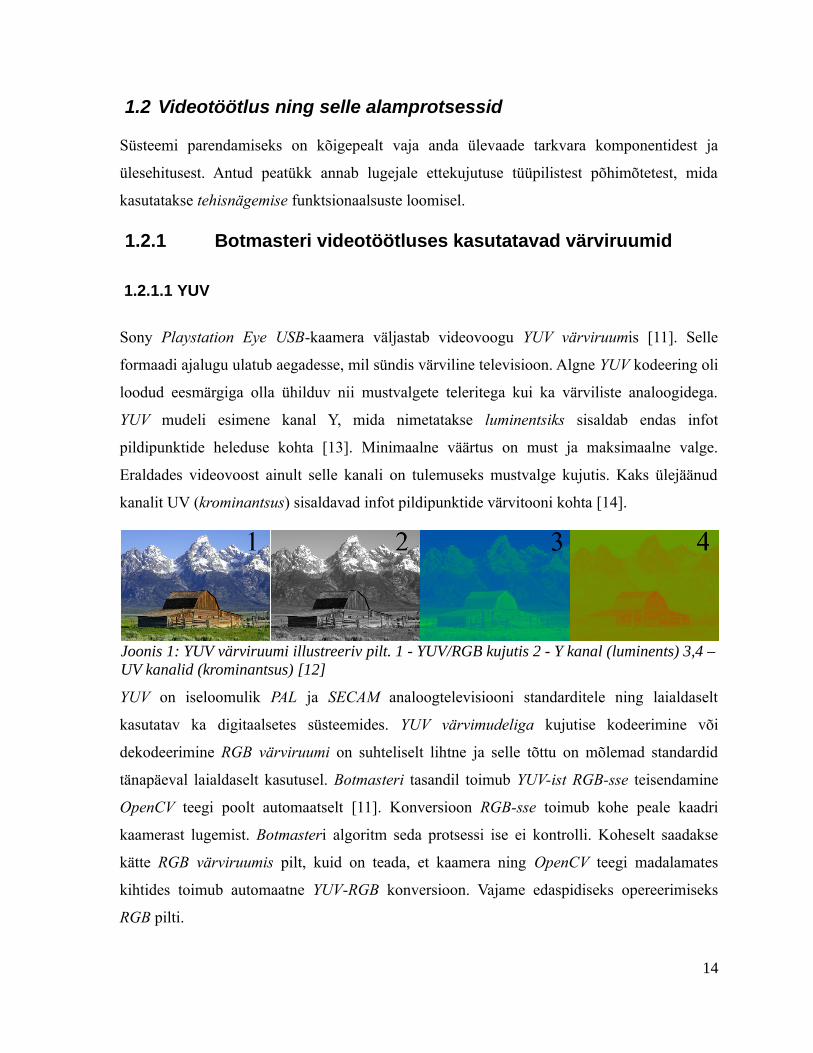
Sony Playstation Eye USB-kaamera väljastab videovoogu YUV värviruumis [11]. Selle
formaadi ajalugu ulatub aegadesse, mil sündis värviline televisioon. Algne YUV kodeering oli
loodud eesmärgiga olla ühilduv nii mustvalgete teleritega kui ka värviliste analoogidega.
YUV mudeli esimene kanal Y, mida nimetatakse luminentsiks sisaldab endas infot
pildipunktide heleduse kohta [13]. Minimaalne väärtus on must ja maksimaalne valge.
Eraldades videovoost ainult selle kanali on tulemuseks mustvalge kujutis. Kaks ülejäänud
kanalit UV (krominantsus) sisaldavad infot pildipunktide värvitooni kohta [14].
YUV on iseloomulik PAL ja SECAM analoogtelevisiooni standarditele ning laialdaselt
kasutatav ka digitaalsetes süsteemides. YUV värvimudeliga kujutise kodeerimine või
dekodeerimine RGB värviruumi on suhteliselt lihtne ja selle tõttu on mõlemad standardid
tänapäeval laialdaselt kasutusel. Botmasteri tasandil toimub YUV-ist RGB-sse teisendamine
OpenCV teegi poolt automaatselt [11]. Konversioon RGB-sse toimub kohe peale kaadri
kaamerast lugemist. Botmasteri algoritm seda protsessi ise ei kontrolli. Koheselt saadakse
kätte RGB värviruumis pilt, kuid on teada, et kaamera ning OpenCV teegi madalamates
kihtides toimub automaatne YUV-RGB konversioon. Vajame edaspidiseks opereerimiseks
RGB pilti.
14
Joonis 1: YUV värviruumi illustreeriv pilt. 1 - YUV/RGB kujutis 2 - Y kanal (luminents) 3,4 – UV kanalid (krominantsus) [12]

1.2.1.2 RGB(BGR)
RGB on tänapäeval tuntuim ning enim kasutatav värviruum. Selle kasutamine on levinud
arvutimonitorides, projektorites, televiisorites ning enamuses teistes seadmetes, mis kuvavad
inimsilmaga nähtavat pildikujutist. RGB värviruum tähendab, et iga värvilist pildipunkti
(pikslit) kirjeldatakse kolme värvikanali abil – punane (Red), roheline (Green) ja sinine
(Blue) [14]. Iga inimsilmaga eristatavat värvi kirjeldatakse nende kolme värvi
kombinatsiooniga. Seetõttu on RGB pilt silmale nähtav värvilisena.
Olenevalt värvisügavusest on igal värvikanalil kindel arv astet, mis kirjeldavad vastava värvi
intensiivsust. Botmasteri platvormi puhul saadakse RGB värviruumis pilt OpenCV
masinnägemise teegi vahendusel pildi laadimisel kaamerast. Botmasteri puhul on kasutatava
RGB värviruumi värvisügavus kaheksa bitine, ehk ühe piksli ühele värvikanalile vastab 256
(0-255) võimalikku täisarvu (2^8=256) [14]. Kolmekanalilises ja kaheksa bitise
pikslisügavusega RGB värviruumis on 256×256×256=16777216 erinevat värvitooni [14].
15
Joonis 2: Lihtne illustratsioon sellest, kuidas kolme värvi abil (Punane, Roheline, Sinine) saadakse muid värvispektri toone [15]

1.2.1.3 HSL
HSL värviruumi peetakse inimmõistusele kõige
enam arusaadavamaks. Levinud standardi järgi
määrab esimene kanal H (Hue) värvitooni. Toon
määratakse vahemikus 0°-359° [17]. Teine kanal S
(Saturation) määrab värvi intensiivsuse vahemikus
0-100% - 0 tähendab mustvalget varjundit ning 100
kõige eredamat [17]. Kolmas kanal L (Lightness)
määrab heledust ning samuti vahemikus 0-100% - 0
tähendab täiesti musta värvi ning 100 valget [17].
Botmasteris on HSLi puhul kasutusel 8-bitine
värvisügavus. See tähendab, et iga piksli H, S ning
L väärtusele vastab number vahemikus 0-255 [17].
1.2.1.4 Ühekanaliline binaarne pilt
Objektide tuvastamisel on kasutusel ka lihtne ühekanaliline
värviruum. Tarkvaras kasutatava OpenCV teegi iseärasustest
tulenevalt ning ülejäänud värviruumidega (RGB ja HSL)
ühildumise eesmärgil on ka siin pikslisügavuseks 8 bitti, kuid
tegelikkuses on programmi töös kasutatavad pikslite
väärtused vaid vahemikus 0-1.
Botmasteris kasutatav binaarne pilt on kahendkodeeritud
representatsioon HSL värviruumis olevast kujutisest (image
binarization) [4]. Tegemist on eriotstarbelise värviruumiga,
mille abil on mugav märkida tuvastatud alasid või huvi
pakkuvaid regioone [4].
16
Joonis 4: Illustreeriv lihtsustatud joonis binaarsest värviruumist. Iga tabeli ruut illustreerib ühte pikslit. Märgitud aladel on pikslite väärtuseks ühed, muudel aladel on nullid.
Joonis 3: HSL värviruumi iseloomustav joonis [16]

1.2.2 Videotöötluse elutsükkel
17
Joonis 5: Botmasteri käivitamise alguses teostatakse mitmed ühekordsed operatsioonid
Joonis 6: Iga kaadri kohta teostatakse rida korduvaid operatsioone, seejärel kuvatakse tulemus.
1.2.3 Initsialiseerimine
1.2.3.1 HSL värviruumi otsingutabeli genereerimine ning pikslite
konverteerimine RGB ja HSL värviruumide vahel
Botmasteri objektide tuvastamiseks kasutatakse kujutist HSL värviruumis. Värvitooni
väärtuse, värvi erksuse ning heleduse põhjal on kõige mugavam tuvastada lihtsamaid
erivärvilisi figuure. Algne RGB värvimudeliga pilt tuleb konverteerida HSL-i ning seda
võimaldab OpenCV teegi funktsionaalsus. Funktsioon cvCvtColor toetab konverteerimist
mitmete erinevate värviruumide vahel [11]. Jõudluse seisukohast on paraku oluliseks
probleemiks antud protseduuri suur arvutusmahukus.
RGB -> HSL konverteerimisel Botmasteris kasutatavate 8-bitiste pikslisügavuste puhul R, G
ja B väärtused konverteeritakse ujukoma kujule ning skaleeritakse vahemikku 0 kuni 1.
Konverteerimisel teostatavad arvutused [17]:
Juhul, kui , siis . Väljundväärtuste kuju: ,
, .
Seejärel väärtused konverteeritakse 8-bitisele pikslisügavusele iseloomulikule kujule:
(väärtuste vahemik 0-255)
OpenCV vahendite kasutamine ei ole kindlasti ainus võimalik viis. Botmasteri loojad on
katsetanud ka konversiooni, kus arvutused teostati täisarvudega ning jõudlus oli märgatavalt
parem.
18

Samas moodsate protsessorite jaoks ei ole ära kirjeldatud ujukomaarvutus sugugi suur
väljakutse. Jõudluse kadu on seotud sellega, et näiteks digitaalse pildi puhul resolutsiooniga
640x480 pikslit, tuleb BGR->HSL konverteerimisel sooritada arvutustehted iga piksli kohta
eraldi, ehk 307 200 korda järjest. Jõudluse tõstmiseks kasutatakse Botmasteris spetsiaalset
otsingutabelit [4].
Otsingutabel (lookup-table, edaspidi LUT) on andmete tabel arvutiteaduses, kuhu on
salvestatud mingi funktsiooni väärtused, et asendada jooksvalt nende arvutamine [4]. Antud
kontekstis on tegu tabeliga, mis sisaldab samale värvitoonile vastavate BGR ja HSL väärtuste
kombinatsioone. Programmi tööajas on otsingutabeli kasutamisest tulenev säästmine väga
suur, sest mälust andmete lugemine on kordades kiirem, kui seda on BGR->HSL arvutustehe.
Otsingutabeli väärtuste paarid arvutatakse programmi initsialiseerimise hetkel, mistõttu on
programmi käivitamine mõnevõrra aeglasem. Tabel salvestatakse operatiivmällu ning
hoitakse seal kuni programmi töö lõpuni. Tabeli maht on ligikaudu 50 megabaiti.
Otsingutabelis on 16777216 kombinatsiooni, ehk kaetud on absoluutselt kõik võimalikud 8-
bit pikslisügavusega RGB toonid.
Seega RGB pildiobjekti konverteerimisel HSL-i, Botmaster programmi töö käigus
arvutustehteid ei teostata, vaid võetakse soovitud HSL piksli väärtus suurest eelarvutatud
tabelist.
1.2.3.2 Videohaaramise struktuuri sidumine kaameraga
OpenCV C teegi videohaaramise (video capture) funktsioonid kasutavad struktuuri
CvCapture, millel ei ole avalikku liidest ning on kasutusel OpenCV funktsioonides
parameetrina [11]. Defineeritud CvCapture struktuur väärtustatakse OpenCV funktsiooniga
cvCaptureFromCAM [18], mis nõuab programmeerijalt teadmist, mis indeksiga kaamerat
tuleb kasutada. Juhul, kui arvutiga on ühendatud ainult üks kaamera, siis tavapärases
olukorras on kaamera indeksiks 0. CV_CAP_ANY[11] või lihtsalt -1 väärtusega atribuut
võimaldab valida esimese ettejuhtuva kaamera indeksi. CvCaptureFromCAM funktsioon
eraldab mälu ning initsialiseerib CvCapture struktuuri kindla kaamera videovoo lugemiseks.
OpenCV C teek toetab nelja erinevat kaameraliidest: Video for Windows (VFW), Matrox
Imaging Library (MIL) Windows keskkonnas ning V4L (Video For Linux) ja FireWire
(IEEE1394) [18]. Hetkel kasutatakse V4L võimalusi.
19

1.2.3.3 Videohaaramise struktuuri seadistamine
1.2.3.3.1 V4L seadistuste rakendamine
Videohaaramise funktsioonide ühiseltkasutataval CvCapture [11] struktuuril on lai valik
seadistamise võimalusi. Seadistamine toimub cvSetCaptureProperty [11] funktsiooni abil,
mis OpenCV teegi tasemel tähendab objekti omaduste muutmist, mis omakorda mõjutab
seda, kuidas riistvaralisel tasemel juhitakse kaamera registreid. See võib tähendada seda, et
kõik OpenCV teegi poolt pakutavad võimalused ei pruugi igal kaameral edukalt rakenduda
ning töövõimeliste seadistuste valik on piiratud kaamera draiveri võimalustega. Botmasteri ja
PS3 Eye kaamera puhul see väljendub selles, et seadistame edukalt kaamerast saadava pildi
mõõtmeid, kuid puudub võimalus OpenCV vahenditega juhtida kaamera kaadrisagedust.
Pildi mõõtmete seadistamiseks kasutame argumente CV_CAP_PROP_FRAME_WIDTH
(kaadri laius) ning CV_CAP_PROP_FRAME_HEIGHT (kaadri kõrgus) [18]. Tähtis on
kasutada vaid selliseid väärtuseid, mis on aktsepteeritavad kaamera ning draiveri poolt. PS3
Eye kaamera on võimeline töötama kahe erineva resolutsiooniga – 320x240 ning 640x480
[19]. Teistsuguste väärtuste kasutamine ei rakendu.
1.2.3.3.1.1 Kaamera ov534 draiveri täiendus
Sony Playstation Eye USB kaamera kasutamiseks Linux keskkonnas on vaja spetsiaalset
draiverit – ov534 [19]. See on GNU GPL litsentsiga levitatav draiver, mille lähtekood on
avalik. Kaamera ning draiver toetavad kaadrisagedust vahemikus 15-60fps resolutsiooniga
640x480px ning 30-125fps resolutsiooniga 320x240px. OpenCV vahenditega ei olnud
võimalik Botmaster rakendusest sättida kaamera videovoo kaadrisagedust (V4L sätestus)
ning resolutsiooni määramisel rakendus vaikimisi sagedus 30fps. Üks võimalik lahendus oli
täiendada ov534 draiverit selliselt, et see toetaks ainult meile vajalikku režiimi 640x480 ning
60fps. (Maksimaalne võimalik kaadrisagedus suurima resolutsiooniga) Sellise muudatuse
teostamine osutus väga lihtsaks. Nimelt ov534 draiveri lähtekoodis on videovoo režiimid
kahes massiivis koos vajalike registrite väärtustega. Ebavajalike režiimide
väljakommenteerimine piirab draiveri funktsionaalsust nii nagu Botmasteris vaja oleks.
Ainsaks võimalikuks kaadrisageduseks 640x480p resolutsiooni juures on nüüd 60 fps ning
kadus vajadus rakendada seadistusi V2L vahendite abil.
20

1.2.3.4 Andmeladu masinnägemise saaduste hoiustamiseks
Videopildil leiduvate esemete tuvastamisel luuakse erinevaid objekte, mida hiljem
kasutatakse roboti juhtloogikas otsuste langetamiseks. Need on erinevad OpenCV objektid
nagu cvSequence, cvContour, cvGraph jne [11][18]. Kuna kaadri puhul ei ole võimalik ette
ennustada, mis mahus kasulikku infot pildilt hangitakse, siis tuleb arvestada, et salvestatavad
andmestruktuurid on dünaamiliselt kasvavad. Mainitud OpenCV andmestruktuuride
salvestamiseks on teegis realiseeritud spetsiaalne objekt cvMemStorage [11]. CvMemStorage
kujutab endast sarnase suurusega mäluplokkide kogumit. Struktuur CvMemStorage sisaldab
endas infot alumise ning ülemise mäluploki kohta. Samuti infot ühe ploki suurusest ja
ülemise ploki vaba mälu kogust baitides. Alumine mäluplokk tähistab andmekogumi algust
ning ülemine tähistab hetkel kasutatavat, kuid tõenäoliselt mitte viimast andmekogumis.
Kõiki mäluplokke alumisest ülemiseni peetakse täielikult hõivatuks ning ülemist poolikult
hõivatuks. Juhul kui mäluplokid saavad otsa, siis reserveeritakse dünaamiliselt mälu uue
ploki jaoks või laenatakse mäluplokk teiselt CvMemStorage struktuurilt, mida päritakse. See
info ei ole programmeerijale üldjuhul vajalik, sest OpenCV teek teostab mäluhaldust
automaatselt. Sellest hoolimata võib rakenduse jõudluse mõjutamise eesmärgil printsiibi
tundmisest kasu olla, sest CvMemStorage konteineri defineerimisel on võimalik määrata ühe
mäluploki andmemaht. See mõjutab otseselt seda, kuidas hakkab toimima dünaamiline
mäluhaldus. Botmasteris defineeritakse CvMemStorage objekt vaikimisi ploki suurusega
64K. Konteineri defineerimiseks kasutatakse funktsiooni cvCreateMemStorage [11].
1.2.4 Kaadri töötlemine
1.2.4.1 Kaadri hankimine
Roboti tehisnägemise elutsükkel algab sellega, et USB kaamerast loetakse uus pildikaader.
See operatsioon teostatakse OpenCV C teegi funktsionaalsusega cvQueryFrame, mis on
tegelikult omakorda kombinatsioon funktsioonidest cvGrabFrame ja cvRetrieveFrame [11].
Esimene on kiire ja optimeeritud viis kaadri eraldamiseks kaamera puhvrist või AVI videost.
Selle funktsiooni eesmärgiks on maksimaalne võimalik kiirus. Hangitud kaader hoiustatakse
teegisiseselt ning see ei ole programmeerijale kättesaadav. Saadud kaader võib olla (olenevalt
21
kaamera/draiveri iseloomust) tihendatud (compressed). CvRetrieveFrame võimaldab
cvGrabFrame funktsiooniga haaratud kaadrile ligi pääseda ning see funktsioon tagastab
mäluviite kaadri objektile. Seega cvQueryFrame oli loodud programmeerija töö
lihtsustamiseks ning koodiloetavuse parandamiseks, sest ühe funktsiooniga täidetakse kaks
eraldiseisvat ülesannet [18]. Ühe kaameraga opereerimisel, nagu Botmasteri puhul, need kaks
käsklust ongi enamasti järjestikuselt teostatavad. Eraldi kasutatakse neid keeruliste
algoritmide puhul sünkroniseerimiseks juhul, kui videokaadreid loetakse samaaegselt
mitmest kaamerast. Botmasteris hetkel selle järgi vajadust ei ole.
1.2.4.2 ROI (Region of Interest) määramine
ROI määrab selle, millist ala video kaadri peal töödeldakse [17][4]. ROI seadistamiseks on
OpenCVs funktsioon cvSetImageROI [18][11]. ROI rakendatakse pildiobjektile ning ala
mõõtmed määratakse nelja koordinaadiga, ehk määratav töödeldav pind on
ristkülikukujuline. Keerulisemate ROI kujundite määramiseks on võimalik kasutada
kombinatsioone erinevatest ristkülikutest. Enamus OpenCV pilditöötluse funktsioone
arvestavad seadistatud ROI-ga, näiteks kõik pikslikoordinaadid pildi töötlemisel arvutatakse
ROI ristküliku ülemisest vasakust nurgast, mitte kaadri enda omast. ROI seadistust on
võimalik muuta rakenduse töö käigus – näiteks saab erineval ajahetkel kasutada erisugust
ROI väärtust või määrata individuaalne ROI erinevate objektide tuvastamiseks. ROI
kasutamisega on võimalik tõsta videotöötluse jõudlust, sest pildikaadrite osaline töötlemine
tähendab väiksemat töödeldavate pikslite arvu.
1.2.4.3 Videotöötlusel kasutatavad pildiobjektid ja nende väärtustamine
Selleks, et töödelda pilti programmiliselt, on olemas spetsiaalsed struktuurid/objektid, mille
abil saab igat videovoo pilti käsitleda iseseisva instantsina. OpenCV C teegis, mida kasutab
Botmaster, on selleks struktuuriks IplImage [11][18]. Erinevalt enamusest OpenCV
terminitest ei alga see “cv” lühendiga. Põhjus seisneb selles, et IplImage pärineb teegist, mis
oli OpenCV eelkäija – Intel Image Processing Library[3][18]. OpenCV uuem alternatiiv on
CvMat [11], mis on väga sarnane, kuid veel ei eksisteerinud ajahetkel, mil arendati esimest
Botmasteri prototüüpi.
22
1.2.4.3.1 IplImage iseloom
IplImage ise on vaid päis pildi kuvandi füüsilistele andmetele. See koosneb kahest osast –
mäluviide pildile ning meta-andmed, mis iseloomustavad kaadrit [18].
ImageData
Kõige tähtsam struktuuri koostisosa on imageData, mis on char tüüpi viit pildi pikslite
tõelistele väärtustele.
meta-andmed
Struktuuris on 21 erinevat parameetrit, mis iseloomustavad kujutise (imageData) tehnilisi
näitajaid. Botmasteri arendaja seisukohast on tähtsamad neist:
• Pikslisügavus (depth). Näiteks kasutades parameetrit IPL_DEPTH_8U, mis määrab
vahemikuks 8-bitise unsigned integeri, on ühe piksli väärtuse võimalik amplituud 0 ja
255 vahel. See on väikseim võimalik vahemik. Alternatiiviks on signed ja unsigned
tüüpi kuni 32-bitised integerid või koguni 64-bitine double-precision floating point.
Botmasteris on kasutusel pikslite väärtused vahemikus 0 kuni 255.
• Kanalite arv (nChannels). Pildi kanalite arv. Üldjuhul määrab see värviruumile
iseloomulikud kanalid, näiteks RGB värviruumi puhul on kolm kanalit – punane,
roheline, sinine. Enamus OpenCV funktsioone on loodud opereerimiseks kuni
neljakanaliste piltidega.
• Kanalite järjestus (dataOrder). Parameeter määrab selle, mis mustri järgi hoiustatakse
infot pildi pikslite kohta. Vaikimisi on andmete paigutus sektsioneeritud kindlas
järjekorras jadamisi, see näeb välja nii: . Alternatiiviks on
kanalite üksteisest eraldamine.
• Algupära (origin). Parameeter määrab, kust alustatakse piksli-koordinaatide
arvestamist – vasak ülemine serv või vasak alumine. Viimane on saanud nimeks
Windows bitmap style ning seletab ära oma päritolu.
• Laius (width) – Pildi laius pikslites.
• Kõrgus (heigth) – pildi kõrgus pikslites.
• ROI – Region of interest koordinaadid. NULL väärtus tähendab, et ROI on kogu pildi
ulatuses.
23

1.2.4.3.2 Img
Botmasteris kasutatav IplImage kujutise objekti viit on kasutusel kogu teostatava
videotöötluse elutsükli vältel. See väärtustatakse viitega pildile, kui kaamerast võetakse
kaader. Sisuliselt on tegemist RGB värviruumis kaadri toorikuga, mis on lähtematerjal pildi
töötlemiseks genereeritavate muude pildimaatriksite loomisel - work ja binary. Samuti
kasutatakse seda objekti pildi kuvamiseks tsükli lõppfaasis. Kõik lisainformatsioon, mis
Botmasteris kaadrile juurde joonistatakse (väravate piirid, pallide asukohad, statistiline tekst
jõudluse kohta jms) rakendatakse just sellele IplImage objektile.
1.2.4.3.3 Work
Pildimaatriks ‘work’ on samuti IplImage objekti viit. See on koopia ‘Img’ maatriksist, kuid
on eelpool mainitud LUT otsingutabeli abil konverteeritud kolmekanalilisse HSL värviruumi.
Pikslite värvitooni, heleduse ja värviküllastuse alusel tuvastatakse selle pildimaatriksi pealt
otsitavad objektid. Leitud objektide asukohad salvestatakse ülal mainitud spetsiaalsesse
andmelattu ning ‘Img’ maatriksile joonistatakse vajadusel info objektide asukoha kohta.
1.2.4.3.4 Binary
‘binary’ on lihtne ühekanalilise värviruumiga pildimaatriks, mille ainsad võimalikud
kasutatavad pikslite väärtused on kas nullid või ühed. See on mõeldud ‘work’ pildiobjekti
abistamiseks. Kui HSL värviruumi abil tuvastatakse objektide asukohad, siis binaarsele
maatriksile need märgitakse. Nullid määravad selle ala, kus otsitavat objekti ei ole ning ühed
määravad selle ala, kus on tuvastatud objekt.
1.2.4.4 Gaussi filtri rakendamine
Robotitel laialdaselt kasutatava PS3 Eye USB-kaamera videopildil esineb tihti teralisust ehk
müra. See on tingitud sellest, et siseruumides jaotub valgus ebaühtlaselt, kaamera sensor on
mõõtmetelt väike ning kaamera säriaeg on lühike. Samuti põhjustavad pildil müra roboti
elektroonilised komponendid, mis tekitavad sensorile elektrilisi laenguid. Kujutise teralisus
takistab pildi töötlemisel objektide tuvastamist. Lihtsalt öeldes müra tõttu tuvastusalgoritmid
leiavad kujutiselt palju väikeseid objekte, mida tegelikult ei eksisteeri. Masinnägemises
kasutatakse teralisuse vähendamiseks udustamist [17][4].
24

Botmasteris rakendatakse pildile gaussi filter, mis on arvutusmahult sobivaim viis mürast
vabanemiseks. Gaussi filtriga silutakse pildimaatriks ‘Work’, sest see on edaspidi sisendiks
teiste maatriksite genereerimisel. Gaussi filter rakendatakse OpenCV vahendite abil.
[20][21]
25
Joonis 7: Müra samasugusel kujutisel erineva sensori valgustundlikkuse (ISO) puhul[20]
Joonis 8: Gaussi filtri rakendamine offset tehnoloogiaga trükitud mustvalgele pildile[21]

1.2.4.5 Objektide tuvastamine
Olenevalt robotivõistluse ülesannetest, muutub igal korral ka raalnägemise funktsionaalsus,
eriti just objektide tuvastamise poolel. Erinevat tüüpi objektide leidmiseks on eraldi
algoritmid, kuid üldised kasutatavad printsiibid on sarnased. Tuvastamiseks kasutatakse
OpenCV masinnägemise funktsioone. Objektide ära tundmiseks kasutatavad parameetrid on
HSL värviruumis pikslitele iseärased tunnused - värvi toon, küllastus ja heledus [4]. Värvi
alusel kindlaks tehtud kontuurid sorteeritakse välja pindala ning kuju alusel. Botmasteri
programmi tasandil kasutatakse värvi tuvastamiseks ülal mainitud pildimaatriksit ‘work’.
Operatsioonideks leitud kontuuridega ja nende füüsiliste omaduste töötlemiseks kasutatakse
pildimaatriksit ‘binary’.
1.2.4.5.1 Golfipalli näide
Golfipalli tuvastamisel on värvuse tasandil tegemist konkreetse oranži värvitooniga, millele
lisanduvad kindel sobiv küllastus ja erksus. Väliskeskkonna valgustus on HSL-i kanalite
puhul kõige enam mõjuv tegur. Seetõttu ei kasutata masinnägemiseks staatilisi väärtuseid,
vaid on kindlad vahemikke, mis võivad sobida. Sobiva värvusega kontuuridest lähtuvalt, on
golfipalli tuvastamise algoritmis realiseeritud vaid ümarate objektide aktsepteerimine.
Pindala poolest on võimalikul pallil konkreetne väärtuste vahemik. Liiga suur tuvastatud
oranž pall on tõenäoliselt mingi viga, liiga väike võib olla lihtsalt müra. Pildi moonutuste
tõttu tohib nähtav pall olla ka ovaalse kujuga. Realiseeritud on ka piir, mis määrab, kus
ovaalsus läheb üle sirgjooneks. Algoritm aktsepteerib ka poolringikujulisi objekte, sest pall
võib olla näiteks osaliselt kaadrist väljas või paista välja mõne muu objekti, näiteks
vastasroboti tagant.
26

1.2.4.5.2 Objektide tuvastamise protsessi kirjeldavad joonised
27
Joonis 9: #1 Kaamerast saadud RGB värviruumis kujutis kirjutati “Img" objekti
Joonis 10: #2 "Img" objekti pikslite andmed konverteeriti HSL värviruumi ning kirjutati objekti "Work"

28
Joonis 11: #3 HSL värviruumis objekti kõik pikslid käiakse läbi ning algoritm valib välja potentsiaalselt sobivad pikslid. Sobivad pikslid väärtustatakse objektis "Binary" ühtedega, ülejäänud nullidega.
Joonis 12: #4 Objektide tuvastamise algoritmid analüüsivad leitud kontuure ning nende vastavust äriloogikaga paika pandud nõuetele. (Kuju, laius, pikkus, pindala jms.) Sobivad kontuurid salvestatakse objektis “CvMemStorage”.

29
Joonis 13: #5 RGB värviruumis objektil "Img" märgistatakse leitud objektid. Märgistamiseks käiakse läbi tuvastatud objektid andmekogumis "CvMemStorage". Vastavalt tuvastatud objekti tüübile valitakse märgistamise viis - näiteks golfipallidele joonistatakse ümber kollane ring. Seejärel rakendus Botmaster kuvab "Img" objekti kujutise koos märgistatud objektidega.

2 Praktiline teostus
2.1 Videotöötluse jõudluse mõõtmise vahendi ning metoodika
väljatöötamine
Masinnägemise komponendi jõudluse parendamisele suunatud produktiivne arendustöö
eeldab mugavat ning kiiret viisi hinnata videotöötluse hetkelist efektiivsust. Autor leidis, et
esimese sammuna videotöötlluse jõudluse parendamisel on vaja luua mugav tööriist, mis
võimaldaks tehisägemise efektiivsust hinnata ning mille mõõtmistulemused oleksid
omavahel võrreldavad.
2.1.1 Nõuded
Visiooni kohaselt olid seatud kindlad eesmärgid:
• Süsteemi jõudlus on kiiresti mõõdetav pärast igat koodimuudatust
• Automatiseeritud jõudlustest on seadistatav
• Automatiseeritud jõudlustest on kasutuskõlblik ka muudes sarnaste kosteaegadega
reaalajasüsteemides
• Automatiseeritud test on käivitatav mõne vajutusega
• Automatiseeritud jõudlustestimise vahendi implementatsioon on lõimeturvaline
30

• Aktiivses ega passiivses olekus mõõtmisvahend ei avalda tajutavat mõju testitava
süsteemi jõudlusele (ei koorma lisaks omakorda protsessorit), pigem on
aktsepteeritav ka suuremahuline operatiivmälu hõivamine.
• Testimisvahendi rakendusliides (API) on lihtsalt loetav/arusaadav ning võimaldab
märgistada mõõdetavaid protsesse piiramata koguses
• Testitulemused on salvestatavad ning töödeldavad levinud andmetöötlustarkvaradega
nagu LibreOffice või MS Excel
• Testitulemused on mugavalt loetavad
• Testitulemuste mõõtmisühikuteks on millisekundid, nanosekundid ning kaadrite arv
sekundis
Botmasteri arendajad on varasemalt samuti tegelenud platvormi kosteaegade mõõtmisega,
kuid kasutatud vahendid ei vastanud lõputöö autori soovidele.
Eelkõige:
• testitulemuste loetavuse seisukohast
• testide paindlikkuse ning seadistatavuse osas
• varasema mõõtmisvahendi tööpõhimõtte kohaselt teostati tulemuste arvutused
mõõdetava süsteemi töö ajal, mis võib avaldada mõju testitulemustele
Siiski oli Botmasteri arendajate varasem kogemus kosteaegade mõõtmisel väga heaks
sisendiks parendatud mõõtmisvahendi loomisel.
2.1.2 Ajatemplite salvestamine
Arvutisiseste sündmuste ajalise kestvuse mõõtmiseks kasutatakse loendureid – ajatempleid.
Loendurite kasutamiseks määratakse kaks hetke, mille vahel soovitakse mõõta ajakulu. See
protsess sarnaneb autode kiiruse mõõtmisele kiirteedel, kus teatud teelõikude alguses ning
lõpus fikseeritakse sõiduki sisenemise ja väljumise ajahetk ning kahe ajatempli võrdlemisel
tuletatakse masina keskmine sõidukiirus mõõdetava sõidudistantsi läbimisel. Botmasteris on
heaks näiteks kaamera pildi lugemine juhtarvuti mällu, kus esimeseks sündmuseks on
kaamerale pildi laadimise käskluse saatmine ja teiseks sündmuseks pildi juhtarvuti mällu
jõudmine. Vahetult enne esimest ning pärast teist sündmust fikseeritakse ajatempel.
31
Varasematele EIK Robootikaklubi kogemustele toetudes sai ajatemplite fikseerimise tarbeks
valitud ka varem kasutusel olnud POSIX [6] programmiliidese funktsionaalsus. Täpsemalt
funktsioon clock_gettime (formaat: time_t, long nanosec), mille parameetriks kasutatakse
monotoonset kella (CLOCK_MONOTONIC [6]). Antud POSIX programmiliidese
funktsionaalsus on väga sobilik Botmasteri testimiseks, kuna kõik EIK Robootikaklubi
robotid kasutavad Botmaster platvormi jooksutamiseks UNIX süsteemil põhinevaid
operatsioonisüsteeme ning clock_gettime [6] tagab väga head näitajad:
• Kõrge efektiivsus – väga väike üldkulu ehk ajatempli väärtuse lugemiseks kuluv aeg.
Väärtus saadakse loetud protsessori taktide jooksul, mis on märkimisväärselt kiire.
• Tulemused esitatakse väga suure täpsusega - täpsusskaalaks on nanosekundid. Üks
nanosekund on 1/1000000000 sekundit.
• Monotoonne loendur tähendab mõõtmistulemuste usaldusväärtust, kuna loenduri näit
kasvab vaid monotoonselt ning ei vähene iialgi. Loenduri väärtust ei saa ka muuta.
Valitud funktsionaalsuse ainsaks piiranguks on see, et ei ole teostatav protsesside mõõtmine,
mis kestavad üle ühe sekundi. See piirang ei ole Botmasteri masinnägemise mooduli jõudluse
mõõtmisel aktuaalne, kuna kõik mõõdetavad protsessid kestavad vaid sekundi murdosa.
2.1.3 Lahenduse disain
Tööriista loomisel on kasutatud singleton tarkvara disainimustrit, mille kohaselt [7]:
• Klassi kuuluva(te) objekti(de) arv on rangelt piiratud ühele ning on ainult üks
ligipääsupunkt - on välistatud olukord, et jõudlust mõõdab samaaegselt mitu
mõõtmisvahendi instantsi.
• "Global point of access" - globaalselt ligipääsetav kõikjal rakenduses. Ei ole
piiranguid, mis komponente ning millal mõõta.
• “Just-in-time“ initsialiseerimine
Märgitud iseärasuste saavutamiseks on kasutusel privaatne konstruktor ning pointer
staatilisele objekti instantsile [7]. Instantsi tagastav funktsioon on avalik ning esmasel
väljakutsumisel algul luuakse objekt ja seejärel tagastatakse. Järgnevatel kordadel toimub
lihtsalt olemasoleva objekti tagastamine.
32

Üldiselt ei soovitata andmeid ja objekte kasutada globaalse kehtivusega, kuid sellel
disainimustril on oma kindel nišš. Näiteks logimise tarkvarad on taolise ülesehitusega.
Samuti soovitatakse rakendada antud mustrit näiteks andmebaasisessioone käsitletavate
moodulite puhul, kui on vaja kindlasti vältida paralleelseid ühendusi. Ning hetkelgi
Botmasteris jõudluse mõõtmiseks see vastas täielikult nõudmistele.
Testi jooksutamise elutsükkel jaguneb kolmeks faasiks:
• Mõõtmise teostamine
• Tulemuste arvutamine, salvestamine
• Tulemuste ning analüüsi kuvamine
Mõõtmine
Testitav süsteem käivitatakse (toimub tavaline Botmasteri töö test-režiimis ehk töötab ainult
videotöötlemine) ning samaaegselt rakendub paika seatud ajatemplite väärtuste salvestamine
operatiivmällu. Tulemuste salvestamisel ei teostata ühtegi muud operatsiooni – kahe
ajatempli jäädvustamine võtab alla 2000ns, mis tähendab, et tööriist võimaldab salvestada
unikaalsete sündmuste ajalisi kestvusi sagedusega pool miljonit korda sekundis.
Tulemuste töötlemine
Testitava süsteemi mõõdetav töö peatatakse. Seejärel loetakse operatiivmälust kogutud
ajatemplid ning algoritm rehkendab koondtulemused. Saadud tulemused analüüsitakse ning
nende põhjal genereeritakse statistilised andmed nagu näiteks iga mõõdetava protsessi
esinemise sagedus või kõige aeglasem protsess. Tulemustest kompileeritakse struktureeritud
csv fail, mis salvestatakse juhtarvuti kõvakettale.
Tulemuste ning analüüsi kuvamine
Viimase sammuna toimub csv faili automaatne avamine, mis kuvab struktureeritud ning
mugavalt loetava tabeli koos tulemustega. Olenevalt seadistusest võib automaatselt
avanevaks redaktoriks olla näiteks Open-Office Calc või mõni lihtsam tekstiredaktor nagu
Gedit.
2.1.4 Tööriista ning selle rakendusliidese kasutamine
Mõõtmisvahend sai ristitud nimega „VisionTime“. Klassides, mille funktsioonide ning
protsesside jõudlust soovitakse mõõta, tuleb lisada VisionTime klassi päis.
33

#include "visiontime.h"
VisionTime liidese juhtimine käib kujul:
VisionTime::DO()->funktsiooniNimi(Parameeter);
Kokku on 6 avalikku juhtimisfunktsiooni.
Esimesed kolm on mõistlik käivitada testitava programmi (nt Botmasteri) main()
funktsioonis.
1. turnOn() funktsioon lülitab sisse VisionTime'i. Kui see välja kommenteerida, siis ülejäänud
VisionTime'i funktsioonid ei tee mitte midagi. (Testikomponendi aktiivne/passiivne olek):
VisionTime::DO()->turnOn();
2. setMeasureNumberOfFrames() - määrab mitme kaadri kohta tulemused arvutatakse.
Nimelt ei ole pilditöötluse kiirus konstantne, see muutub ajas pidevalt. Ühe kaadri mõõtmine
ei ole otstarbekas, sest tegu võib olla kaadriga, mis on tegelikust keskmisest parem/halvem.
VisionTime kogub info etteantud arvu kaadrite kohta ning arvutab keskmised.
VisionTime::DO()->setMeasureNumberOfFrames(90);
3. setMeasuringFromFrame() - määrab mitmendast kaadrist alates alustatakse mõõtmist.
Jällegi pilditöötluse kiirus pole konstante ja kaamera videovoo edastamise alguses on jõudlus
mõnevõrra kehvem ning paari sekundi pärast stabiliseerub.
VisionTime::DO()->setStartMeasuringFromFrame(120);
Järgmised kolm lähevad sinna, kus toimub mõõdetav töötlemistsükkel.
4. newFrame() - lipp, mis määrab uue kaadri alguse.Väljakutse tuleb panna koodis uue kaadri
funktsiooni vahetusse lähedusse.
VisionTime::DO()->newFrame();
5. markBegin() - lipp, mis määrab mõõdetava protsessi alguse. Funktsiooni argumendiks on
protsessi nimetus või lühend - seda kasutatakse lõpus tulemuste kokkuvõttes.
VisionTime::DO()->markBegin("LUT");// Mõõdetav protsess nt 'LUT' vms
6. markEnd() - lipp, mis määrab mõõdetava protsessi lõpu. Argument on sama nagu protsessi
alguse lipu puhul.
VisionTime::DO()->markEnd("LUT");
34

VisionTime aktsepteerib ka "alamprotsesse":VisionTime::DO()->markBegin("Process");VisionTime::DO()->markBegin("Sub-process1");//alamprotsess1VisionTime::DO()->markEnd("Sub-process1"); VisionTime::DO()->markBegin("Sub-process2");//alamprotsess2VisionTime::DO()->markEnd("Sub-process2"); //miskit muudVisionTime::DO()->markEnd("Process");
Kuid alamprotsess ei tohi olla sama nimega:
VisionTime::DO()->markBegin("Nimi");//mingi protsessVisionTime::DO()->markBegin("Nimi");//mõõdetav protsessVisionTime::DO()->markEnd("Nimi"); //Kumb lõpeb?VisionTime::DO()->markEnd("Nimi"); //Kumb lõpeb?
Samuti ei pea mõõdetavad protsessid esinema sama arv kordi. Iga protsessi keskmine
arvutatakse täpselt selle järgi kui tihti selle käivitamiseni programm jõudis. Ainus nõue on
see, et viimase mõõdetava kaadri lõpuks ei tohi olla ühtegi pooleliolevat protsessi.
Videotöötluse puhul on see loomulik, sest uue kaadri alguses on kogu eelmise kaadri
töötlemine juba läbitud.
2.2 Mõõtmise teostamine esialgse platvormi videotöötluse
komponendi jõudlusele
Peale mõõtmisvahendi implementeerimist ning selle töökindluse testimist, oli võimalik
alustada platvormi esimeste mõõtmistöödega. Botmasteri masinnägemise komponendi
allsüsteemidele olid lisatud jõudlustestimise raamistiku rakendusliidese taimerite lipud. Need
lipud jäävad tarkvara koodi kogu praktilise arenduse lõpuni ning võimaldavad iga hetk mõõta
komponentide kosteaegu. Autori visiooni järgi võivad need jääda Botmasteri lähtekoodi ka
pärast lõputöö valmimist ning olla soovi korral jõudluse indikaatoriks ka tulevaste arenduse
35

vältel. Juhul, kui jõudluse automaattestimise raamistik on passiivses olekus (seadistatustud
välja lülitatud olekusse), ei avalda see Botmasterile mingisugust mõju.
Esialgse süsteemi mõõtmine teostati kahe stsenaariumi järgi – täissuuruses pildi (640x480px)
ning poole väiksema resolutsiooniga kaadrite töötlemine (640x240px). Viimane on sarnane
võistlusrobotitel kasutatava seadistusega, kus on vaja maksimaalselt laia, kuid suhteliselt
kitsast pilti. Autor toetus varasematele kogemustele ning oletas, et jõudluse kasv süsteemi
parendamise käigus ei pruugi olla korrelleeruv erinevate resolutsioonide puhul – teisisõnu
tarkvaraline muudatus võib anda erinevat efektiivsuse võitu suurema ja väiksema
resolutsiooniga kaadrite töötluse puhul.
Raalnägemise jõudluse testimisel kasutatakse alati väga sarnast tausta – tulemuste
võrdlemiseks peavad olema mõõtmisel ka sarnased tingimused. Kõige lihtsam on valida
staatiline natüürmort, kus ei toimu mingit liikumist (täpselt samasuguse liikumise korduv
simuleerimine on keeruline). Oli valitud suhteliselt ebaühtlane taust, kus on heledad ning
tumedad varjundid – täpselt samasugust kasutatakse ka edaspidiste mõõtmiste puhul. Tasub
ära märkida, et tegemist on mõõtmise sooritamisega „ideaalsetes tingimustes“. Paralleeliks
võib tuua näiteks sõiduautode tehnilised spetsifikatsioonid, kus on kajastatatud tootjapoolne
ajaline hinnang sõiduki kiirendusele 0-100km/h – päriselus on tulemused mõnevõrra
tagasihoidlikumad, sest mängu tulevad piiravad tegurid nagu ilmastikutingimused (nt
vastutuul), teekatte tingimused, sõitjate ning pagasi kaal, sõiduvahendi amortiseerumine jne.
Ka lõputöös esitatud mõõtmistulemused annavad hea ülevaate jõudluse efektiivsusest ning on
igati võrreldavad omavahel, kuid päris võistlustingimustes võivad numbrilised väärtused olla
teised.
2.2.1 Tulemused
Tulemused näitasid, et esialgse süsteemi masinnägemise komponendi kaadrisagedus on
maksimaalse resolutsiooni puhul 19 ning poole väiksema pildiga 26 kaadrit sekundis.
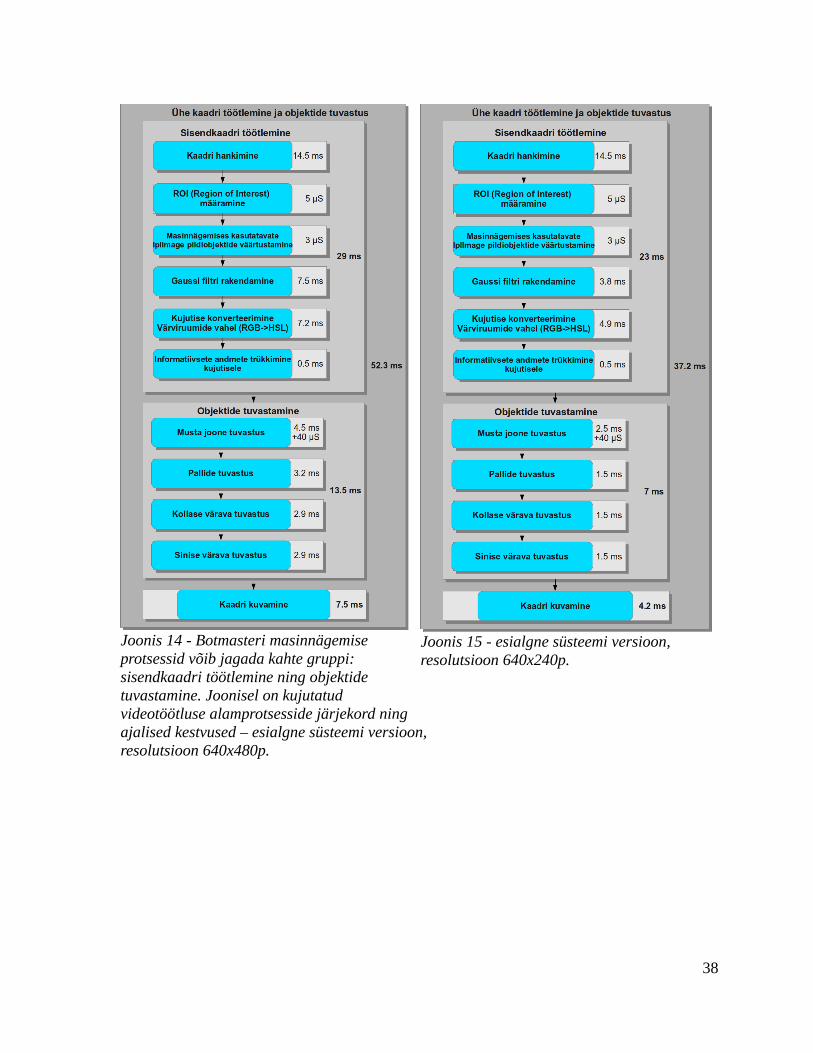
Tulemist selgus, et kõige aeganõudvam protsess on kaadri hankimine kaamerast. Sinna
alla läheb ajavahemik alustades kaamerale pildi laadimise käskluse saatmisest kuni
töötluseks valmis pildi jõudmiseni juhtarvuti mällu. Olenemata töödeldava pildi
resolutsioonist, alati 14 millisekundit kestvale kaadri laadimisele (kaamerast laetakse iga
kord täismahus kaader, mis hiljem vajadusel lõigatakse väiksemaks - seega selle protsessi
36

ajakulu alati sama) järgneb objektide tuvastamine, mis summaarselt võtab suure
resolutsiooniga 13,5ms ning väikesega 7ms. Objektide tuvastamine jaguneb neljaks osaks –
aeglaseim neist oli musta joone tuvastus (4,5ms ja 2,5ms), mõnevõrra kiirem palli otsimise
algoritm (3,2ms ja 1,5ms) ning viimased kaks omavahel võrdväärsed väravate otsimise
funktsioonid (sama funktsioon käivitatakse erinevate parameetritega kaks korda, mõlemal
korral kosteajad suure pildiga 2,8ms ning väiksega 1,5ms). Järgnes kaadri kuvamine
Botmaster rakenduses. Pildi näitamine nõuab aega 7,5ms, kitsama kaadri puhul 4,2ms.
Natukene kiiremad protsessid olid gaussi filtri rakendamine ja kujutise konversioon RGB ja
HSL pildiruumide vahel, mõlema ajakulu oli täispildi puhul <8ms ning väikese pildiga <5ms.
Ülejäänud protsesside kosteaegade summa on olenemata töödeldava kaadri resolutsioonist
ligikaudu 0,5ms.
37
38
Joonis 14 - Botmasteri masinnägemise protsessid võib jagada kahte gruppi: sisendkaadri töötlemine ning objektide tuvastamine. Joonisel on kujutatud videotöötluse alamprotsesside järjekord ning ajalised kestvused – esialgne süsteemi versioon, resolutsioon 640x480p.
Joonis 15 - esialgne süsteemi versioon, resolutsioon 640x240p.

NB! Sektordiagrammi lilla tulba koosseisu on lisatud ka kõik masinnägemise komponendi mõõtmise skoobist välja jäänud protsessid. Samuti ka platvormi muud kosteajad: roboti juhtloogika täitmine, suhtlus kontrolleriga jms.
39
Joonis 16: masinnägemise komponendi jõudlustestimise raamistikuga saadud tulemused esialgsele Botmasteri versioonile. Tulemused on sorteeritud kosteaegade ajakulu järgi (vasakpoolne tulemuste tulp), aeglasemad eespool.
640x480px 640x240pxFPS 19 26
90 90120 120
Avg_ms Avg_ms1 52.28 37.132 14.14 14.423 13.52 7.044 7.47 4.175 7.33 3.816 7.16 4.887 4.55 2.458 3.2 1.459 2.92 1.61
10 2.75 1.4111 0.34 0.3712 0.1 0.0613 0.04 0.04
14 0.04 0.0415 0.003 0.00316 0.003 0.00317 0.005 0.005
TULEMUSEDEsialgne süsteem (arenduse alguspunkt)
Resolutsioon
Vahelejäetud kaadrid enne Mõõtmise algustMõõdetud kaadrite arv
ProtsessKaader (Kõik kokku)Kaadri hankimineObjektide tuvastusKujutise kuvamineGaussi filterRGB-HSL KonverteerimineMusta joone tuvastusPallituvastusVärava tuvastus 1Värava tuvastus 2Statistika kandmine pildileVisuaalsete kuj kandmine pildileKaadrisageduse kalkuleerimineVärava ääre tuvastus(Musta joone tuvastuse lisa)Pildiobjektide väärtustamineprocfunct_stor_crt?! Mis see onROI määramine
Joonis 17: kosteaegade kestvuste suhe, esialgne süsteem.640x480p
27.05%
14.02%
13.70%25.86%
5.09%
14.29%
Joonis 18: kosteaegade kestvuste suhe, esialgne süsteem. 640x240p
38.84%
10.26%13.14%
18.96%
7.57%
11.23%

2.2.2 Hinnang tulemustele ning prioriteetide seadmine
Esialgse platvormi videotöötluse komponendi jõudluse mõõtmise eesmärgiks oli selgitada
välja kõige aeganõudvamad allsüsteemid – mida kauem kestab operatsioon, seda suurema
tõenäosusega on võimalik leida võimalusi selle optimeerimiseks. Autor toob välja, milliste
protsesside parendus oli valitud prioriteetseks ning millistele ei keskenduta.
Parendamiseks välja valitud allsüsteemid
• Kaadri hankimine – Platvormi kõige aeglasem protsess, mille kestvus jääb samaks
olenemata töödeldava kaadri suurusest. See on kõige prioriteetsem komponent, mida
tasub täiendada.
• Kujutise kuvamine – Aeglane protsess, mis ei mängi videotöötluses funktsionaalset
rolli, kuid on summaarset jõudlust aeglustav tegur. Uue kaadri võtmine ootab eelmise
kaadri kuvamise taga.
• Objektide tuvastus – Koosneb mitmest üksteisest sõltumatust alamprotsessist, mis
viitab sellele, et potentsiaalne optimeerimisvõimaluste spekter on lai.
Allsüsteemid, mille parendamisele ei keskenduta
• Gaussi filter – Gaussi filtri funktsionaalsuse implementeerimine on keeruline ning
väga aeganõudev. Botmasteris kasutatakse OpenCV teegi sisseehitatud
funktsionaalsust, mis ongi kõrgelt efektiivne ning optimeeritud. Autor leiab, et antud
protsessi kiirendamiseks väga palju alternatiive ei ole.
• RGB-HSL konversioon – Botmaster platvormi arendajad kasutavad selles allsüsteemis
väga efektiivset otsingutabelit ning pointer-aritmeetikat. Aja jooksul on korduvalt
tehtud katseid seda protsessi veelgi optimeerida, kuid need ettevõtmised ei ole toonud
soovitud tulemusi. On alust arvata, et oleme väga lähedal maksimaalsele võimalikule
efektiivsusele. Antud lõputöös sellele protsessile ei keskenduta.
• Kõik ülejäänud protsessid – nende summaarne ajaline kestvus on väga väike ning
tegemist on enamasti lihtsate operatsioonidega, mille parendamine antud kontekstis ei
ole otstarbekas.
40

2.3 Platvormi videotöötluse jõudluse parenduse võimalike
metoodikate ja lähenemiste analüüs
Autor valis välja prioriteetsemad masinnägemise komponendi allsüsteemid, mille
täiendamise abil on seatud eesmärgiks platvormi videotöötluse summaarse jõudluse tõstmine.
Antud peatükis tuuakse välja potentsiaalsed lahendused kosteaegade kärpimiseks ning
sõnastatakse hüpoteesid, millele loodetakse leida kinnitust väljavalitud parenduste
realiseerimise tulemusena. Võimalike lahenduste väljapakkumistel tugines autor eelnevale
kogemusele, publikatsioonidele ning sarnaste reaalajasüsteemide arenduses kasutatavatele
disanimustritele. Lisaks uuris autor analoogseid probleemilahendusi teistes projektides.
2.3.1 Üldine
Kindlasti on võimalik saavutada tulemusi riistvaraliste muudatuste abil. Näiteks juhtarvuti
asendamine sellisega, mille protsessoril on suurem taktisagedus ning tuumade arv. Samuti
võib vahetada välja videosisendi riistvaralise komponendi. Praeguse USB 2.0 kaamera
asemel saaks kasutada oluliselt kiiremat USB 3.0 või IEEE 1394 (FireWire) kaamerat. USB
3.0 protokoll on kordades suurema läbilaskevõimega ning IEEE 1394 standard oli loodud
spetsiaalselt pilditöötlusseadmete jaoks. Mainitud lahendused on antud lõputöö skoobist
väljas, kuna autori eesmärgiks on keskenduda vaid Botmaster tarkvara parendamisele ning
tulemus peab olema sõltumatu välistest teguritest nagu riistvara, draiverid, kasutatav
operatsioonisüsteem jms. Kõikide lisaarenduste testimine teostatakse rangelt võrdsetes
tingimustes.
Juhul, kui ülesannete täitmine ei sõltu üksteisest, võib teostada neid samaaegselt. Tuleb
arvestada sellega, et süsteemis oleks selleks piisavalt ressurssi, sest arvutusmaht ühe ajaühiku
kohta tõuseb kordades. Ideaalis võib jõuda tulemuseni, kus mitme paralleelselt lahendatava
ülesande summaarne kosteaeg võrdub kõige pikema ülesande täitmise ajaga.
Siinkohal tuuakse tihti näide auto ettevalmistamisest enne reisi, kus ülesanded jagatakse
järgmiselt: pagasi paigutamine kaheksa minutit, reisijate paigutamine viis minutit ja
tankimine kolm minutit. Tehes kõiki neid ülesanded üksteise järel, kulub nendele aeg 16
minutit. Samas pole ükski ülesanne teisest sõltuv ja need lahendatakse paralleelselt kaheksa
minuti jooksul. Seega on selliselt püstitatud ülesande juures võimalik kokku hoida pool ajast
41
tehes ülesandeid paralleelselt. Ülesannete paralleelne täitmine on levinud võte
reaalajasüsteemides, kus tihti domineerib tsükliline protsesside kulgemine. Autor panustab
võimalustele teostada üheaegselt erinevaid operatsioone või nende detailsemaid samme ning
saavutada sellega lühemat aega ühe kaadri töötlemisel.
2.3.2 Hüpotees - Kaadri hankimine
Autor uuris mujal maailmas realiseeritud videotöötluse lahendusi ning üks
märkimisväärsemaid antud lõputöö kontekstis oli iseenda eest rääkiva nimetusega projekt
„Qt-OpenCV-Multithreaded“ [22]. Tegemist on avatud lähtekoodiga platvormiga, mille
arendaja on otsinud lahendusi sarnasele probleemile. Märkimisväärseks teeb mainitud
projekti selle sarnanus EIK Robootikaklubis kasutatavate tehnoloogiate ning vahenditega.
Projekti arendaja on arendanud platvormi UNIX tüüpi operatsioonisüsteemi suunitlusega,
kasutatud on samasugust Playstation Eye USB kaamerat ning platvormi komponendid on
realiseeritud kasutades Qt ning OpenCV teeke. Projekti peamine fookus on mitmelõimelise
arhitektuuriga pilditöötlemisel. Näiteks on seal implementeeritud kaamerast kaadri võtmine,
mis toimub paralleelselt kaadri töötlemisega (näiteks filtrite rakendamisega). Kahjuks ei ole
võimalik Botmasterisse implementeerida selles projektis toimivaid valmislahendusi, kuna
Botmasteris ning „Qt-OpenCV-Multithreaded“ platvormides on kasutuses erinevad OpenCV
teegid. Botmaster kasutab vanemat C keele teeki, aga välismaises analoogis on C++
versioon. Need kaks teeki omavad sarnaseid funktsionaalsusi, kuid tegelikult on nad väga
erinevad – teistsugune rakendusliides, mäluhaldamise printsiibid jms. OpenCV teegi
väljavahetamine Botmasteris ei ole otstarbekas, kuna see oleks äärmiselt mahukas töö (eriti
objektide tuvastuse pool) ning Botmasteri arendajad on praeguse teegiga väga harjunud. Küll
aga andis mitmelõimelise lahendusega projekt lõputöö autorile ideid ning kinnitust, et
paralleelselt teostatavate protsessidega analoogsed lahendused toimivad ning jõudlus on
efektiivne. Mitmelõimeliste disainimustrite kasutamine on tänapäeval raalnägemises standard
ning kõrge tootlikuse võti [4].
Kaadri hankimise lahenduse ümberdisainimine suure tõenäosusega tõstab platvormi
efektiivsust.
42
2.3.3 Hüpotees - Objektide tuvastus
Autor vaatles seni objektide tuvastamise funktsionaalsusi musta kastina. Iga eraldiseisva
objekti tuvastamise funktsioonide uurimisel selgus, et neis esinevad väga sarnased mustrid
ning korduv funktsionaalsus.
Objektide tuvastamise lahenduse ümberdisainimine suure tõenäosusega tõstab
platvormi efektiivsust.
2.3.4 Hüpotees - Kujutise kuvamine
Kujutise kuvamine on arvutusmahult kallis protsess, mis kaadri töötlemise seisukohast ei loo
lisandväärtust. Kaadrite kuvamine on väga väärtuslik Botmaster tarkvara testimisel, eriti uute
objektide tuvastamise funktsionaalsuste loomisel. Kuid roboti töö ajal (võistlustingimustes)
on praeguse lahenduse disainis parandust vajav puudujääk:
• koormatakse juhtarvuti protsessorit
• uue kaadri võtmine (seega ka kogu uue kaadri töötlemine) ei alga enne kui eelmine
kaader kuvatakse Botmasteri graafilises liideses.
Töödeldava video kuvamise lahenduse ümberdisainimine suure tõenäosusega tõstab
platvormi efektiivsust.
2.4 Lahenduste realiseerimine
2.4.1 Mitmelõimeliste lahenduste realiseerimise võimalused
Botmaster platvormis
Ühelõimelise programmi täiustamine mitmelõimeliseks ning allsüsteemide protsesside
samaaegse täitmise implementeerimine eeldab eelnevat analüüsi. Autor kaardistas
protsessidevahelised sõltuvused, et tuvastada, milliseid neist oleks võimalik täita üheaegselt.
Mitmelõimeliste lahenduste arendamisel kutsutakse sellist võimalust protsesside
asünkroonsuseks (activity asynchrony) [23]. Sõltuvuste kindlakstegemiseks vaadati, kas
operatsiooni teostamine oleneb eelneva(te) allsüsteemi(de) tulemusest. Näiteks gaussi filtri
rakendamine ning RGB-HSL konversioon ei või olla üheaegselt täidetavad, sest eesmärgiks
43
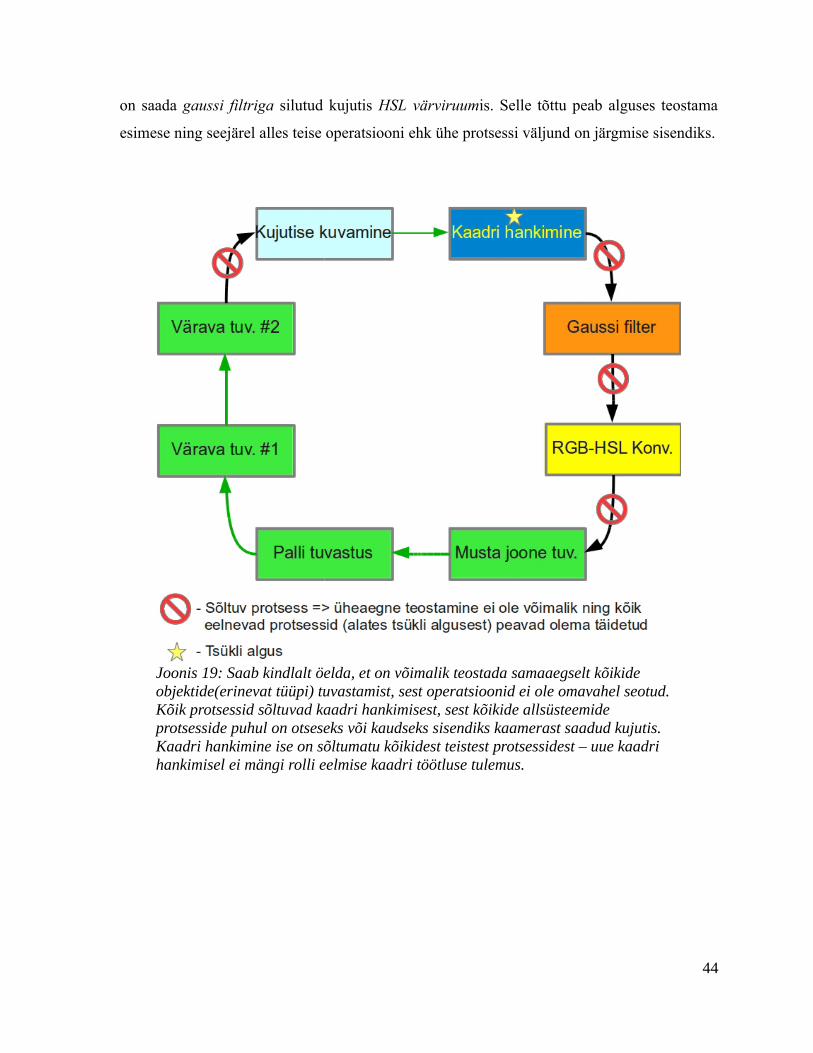
on saada gaussi filtriga silutud kujutis HSL värviruumis. Selle tõttu peab alguses teostama
esimese ning seejärel alles teise operatsiooni ehk ühe protsessi väljund on järgmise sisendiks.
44
Joonis 19: Saab kindlalt öelda, et on võimalik teostada samaaegselt kõikide objektide(erinevat tüüpi) tuvastamist, sest operatsioonid ei ole omavahel seotud. Kõik protsessid sõltuvad kaadri hankimisest, sest kõikide allsüsteemide protsesside puhul on otseseks või kaudseks sisendiks kaamerast saadud kujutis. Kaadri hankimine ise on sõltumatu kõikidest teistest protsessidest – uue kaadri hankimisel ei mängi rolli eelmise kaadri töötluse tulemus.

45
Joonis 20: Autor visualiseeris ühe võimaliku lahenduse.

Joonis 20 kirjeldab, et:
• Uue kaadri hankimist saab teostada kogu pildi töötlemise tsükli vältel. Autor arvutas,
et juhul kui gaussi filtrini jõudmiseks ei oleks vaja lugeda kaamerast pilti, vaid saaks
laadida mälust eelnevalt laetud (paralleelses lõimes) pilt, siis ideaalses olukorras võib
jõudluse efektiivsus tõusta 25-35%. Hinnangulise jõudluse võidu arvutamiseks
kasutati esialgse süsteemi mõõtmistulemusi ning kaadri keskmisest kestvusest lahutati
kaadri hankimiseks kuluv aeg, seejärel liideti eeldatav aeg (alla 2ms), mis kulub
kaadri laadimisele operatiivmälust.
• Kõikide objektide tuvastamise operatsioonide täitmist alustatakse üheaegselt.
Objektide tuvastamine kestab summaarselt sama kaua kui kõige aeglasem
tuvastamise allsüsteem – musta joone tuvastus. Autor arvutas, et ideaalis võib
jõudluse efektiivsus tõusta 15-20%. Hinnangulise jõudluse võidu arvutamiseks
kasutati esialgse süsteemi mõõtmistulemusi ning kaadri keskmisest kestvusest lahutati
palli ning väravate tuvastamisele kuluv aeg.
Mainitud arvutusviis on antud situatsioonis sobiv selleks, et teha kindlaks ligikaudsed
jõudluse paranemise väljavaated. Juhul, kui parendusi planeeritakse mitu korraga, siis on
arvutamiseks soovitatav kasutada Amdahli seadust [24]. See on matemaatiline arvutusviis,
mille abil on võimalik välja selgitada maksimaalne eeldatav programmi jõudluse tõus, kui
täiustatakse ainult teatud osa süsteemist. Seda võtet kasutatakse tihti tarkvaralahenduste
optimeerimisel lõimede abil.
2.4.2 Kaadri hankimine – mitmelõimeline lahendus
2.4.2.1 Eesmärk
Kaadri hankimise allsüsteemi lahenduse optimeerimise eesmärgiks on vabaneda kaamerast
kaadri hankimisele kuluvast ajalisest viivitusest. Mujal maailmas realiseeritud lahendused
annavad kinnitust, et eraldi lõimes kaadri lugemine kaamerast võimaldab saavutada
püstitatud eesmärki.
46

2.4.2.2 Kontseptuaalne lahendus
47
Joonis 21: Olemasolev ning uus kontseptuaalne lahendus

Joonis 21 annab ülevaate disainimuudatustest, mille abil oleks võimalik olulisel määral
parandada süsteemi jõudlust. On välja toodud olemasolev ning uus kontseptuaalne lahendus
ning nendevahelised erinevused.
2.4.2.2.1 Ülevaade
Olemasolev lahendus
• Süsteem toimib ühes lõimes ning protsessid korduvad tsükliliselt alati samas
järjekorras
Kontseptuaalne lahendus
• Süsteemis on kaks lõime, millest üks on orienteeritud ainult kaadri laadimisele
kaamerast
• Punase katkendliku joonega on märgitud kaadri hankimise operatsiooni lõpphetk, mis
ühtib kujutise kuvamise allsüsteemi lõppemisega
• Rohelise katkendliku joonega on märgitud kaadri hankimise operatsiooni alustamise
ajastus
Jooniselt on näha, et kaadri hankimise operatsiooni nihkumine paralleelsesse lõime lühendab
pealõime tsükli kestvust. Tsükkel lüheneb ligikaudu ühe kaadri hankimisele kuluva aja võrra.
2.4.2.2.2 Takistused
Näitena välja toodud kontseptuaalset lahendust on praktiliselt võimatu realiseerida. Takistus
seisneb selles, et puudub võimalus täpselt ajastada kaadri hankimise protsessi alustamist
teises lõimes.
Objektide tuvastuse ning muude allsüsteemide kosteajad olenevad videosisendi visuaalsest
keerukusest (vaatevälja kuuluvate objektide rohkus, valgustustingimused jms). Sarnane mõju
avaldub ka mitmetele teistele allsüsteemidele. Kaadri hankimise alustamist tuleks ajastada
täpselt nii, et operatsioon lõppeks üheaegselt mingi kindla protsessiga programmi peavoos
(olemasoleva süsteemi puhul kujutise kuvamisega) – see on lihtsal viisil praktiliselt
teostamatu, sest puudub võimalus prognoosida nimetatud protsesside ajalisi kestvusi.
Teoreetiliselt oleks võimalik luua algoritm, mis hindaks videokaadri keerukust ning suudaks
tuletada hinnangulisi eeldatavaid kosteaegu näiteks objektide tuvastusele või kujutise
kuvamisele – selline info oleks abiks antud kontseptuaalse lahenduse loomisel. See lisaks
48

programmile arvutusmahtu ning töökindlus oleks vaieldav. Autor kavatseb nimetatud
kontseptsioonile tuua sisse täiendused, et saada toimiv ning robustne lahendus.
2.4.2.3 Teostus – Realiseeritud lahendus
49
Joonis 22: Realiseeritud uuendused – eelnevalt kirjeldatud kontseptuaalse lahenduse täiustatud versioon

Joonis 22 kirjeldab realiseeritud täiendusi kaadri hankimise allsüsteemis. Parenduste
eesmärgiks oli programmi summaarse jõudluse tõstmine. Lahendus põhineb eelnevalt
väljatoodud kontseptuaalsel lahendusel, kuid omab mitmeid täiendusi, mille abil lahendati
ilmnenud probleemid takistuste ja kitsendustega.
2.4.2.3.1 Põhimõte ning iseloomustus
Üldine:
• Süsteemis on kaks lõime, millest üks on orienteeritud ainult kaadri laadimisele
kaamerast.
• Mõlemas lõimes toimuvad järjepidevad tsüklilised protsessid, mis ei ole omavahel
sünkroonis ning on täiesti sõltumatud. Mõlemad kestavad katkematult kuni
programmi töö lõpuni.
Lõim #2 (Kaadri hankimine)
• Kaadri hankimise lõime peamiseks komponendiks on tsükkel, milles toimub
lakkamatu värskete kaadrite laadimine kaamerast. Selline disainimuster on
tehisnägemises tuntud kui „ring acquisition“ ning sümboliseeribki seda, et kaadri
hankimise tsükkel käib konstantselt ringi [4].
• Hangitud kaadrite hoiustamiseks on kaks ühekaadrilist puhvrit, kuhu kordamööda
sisestatakse kaamerast saadud kaadrid. Eelmine puhvris olev kaader kirjutatakse üle
ning jääb kasutamata.
• Vahelüliks pea programmivoo ning kaadri hankimise lõime vahel on viimase
koosseisu kuuluv komponent kaadrite väljastamiseks. Kaadrite edastamiseks
pealõimesse kasutatakse kuhjuvat lähenemist, mida hallatakse põhimõttel: viimasena
sisse ning esimesena välja. Selline printsiip on tuntud LIFO loogika nime all [25]
(LIFO – last in, first out). Kaadri väljastaja teeb kindlaks, millisesse kahest puhvrist
oli viimati paigutatud värske kaader, ning edastab selle. Kaadri väljastamisel toimub
olemasoleva kujutise lugemine puhvrist (operatiivmälust), mis on kiire protsess.
Eeldatav kestvus olemasoleva riistvara puhul <1,5ms.
Lõim #1 (Pealõim)
• Pealõimes toimib kõik sarnaselt esialgsele süsteemile (selle ainsas lõimes), kuid
kaadri hankimise protsess on asendatud pöördumisega kaadri väljastaja poole.
50

2.4.2.3.2 Lahenduse tehnilised tunnusjooned
Protsesside eraldamiseks paralleelsesse lõime kasutati Qt teegi vahendit QThread [26].
Qthread on platvormist sõltumatu viis programmilõimede haldamiseks. QThread
funktsionaalsuse kasutuselevõtt oli tehtud „Qt-OpenCV-Multithreaded“ [22] projekti
eeskujul, kus sarnase eesmärgi täitmiseks kasutati just seda vahendit. Autor lähtus ka
eesmärgist kasutada just Qt alternatiive mitmelõimelise lahenduse implementeerimiseks.
Botmaster platvormis on üsna palju Qt teegil põhinevat funktsionaalsust ning arendajate
jaoks on kindlasti mugav, kui programmi erinevad osad on ühtses stiilis.
Qthreadi iseloomustus – mugav liides võimaldab: [27]
• Lihtsalt ning kiiresti luua funktsionaalsusi, mis peavad olema täidetud eraldi lõimes.
• Pärida infot iga lõime oleku kohta: jooksev, lõpetatud, ootamine.
• Juhtida lõime: käivitamine, peatamine.
• Seadistada igat eraldiseisvat lõime: prioriteet, virnmälu suurus jms.
• Seada lõimede prioritiseerimiseks 8 erinevat taset.
• Hallata signaale lõimede vahel.
Kaadri laadimiseks kaamerast ning kaadrite hoiustamiseks puhvrites on kasutusel samad
printsiibid ja andmestruktuurid, mis esinevad ka esialgses Botmaster platvormis.
2.4.2.3.3 Lahenduse väljatöötamine, silumine ning testimine
Lahenduse realiseerimiseks loodi mitu prototüüpi. Alustatud oli ühe puhvriga. Lõime
muutujate lukustamist testiti samuti erinevate Qt teegi semafor-vahenditega nagu QMutex
või QReadWriteLock [26]. Keeruline puhvriloogika, kus toimus katkematu kaadrite
kirjutamine samasse puhvrisse ning selle tõttu ka pidev elementide olekute muutumine, ei
tundunud autorile piisavalt hea lahendus. Üsna peagi jõuti lahenduseni, kus on kaks
üksteisest sõltumatut ühekaadrilist puhvrit, kuhu kaadrite kirjutamine toimub kordamööda.
Värskeima pildiga puhver ei ole kaadri hankimise lõime poolt lukustatud ning täidab
püstitatud eesmärgi – kiire kaadri edastamine pealõime.
51
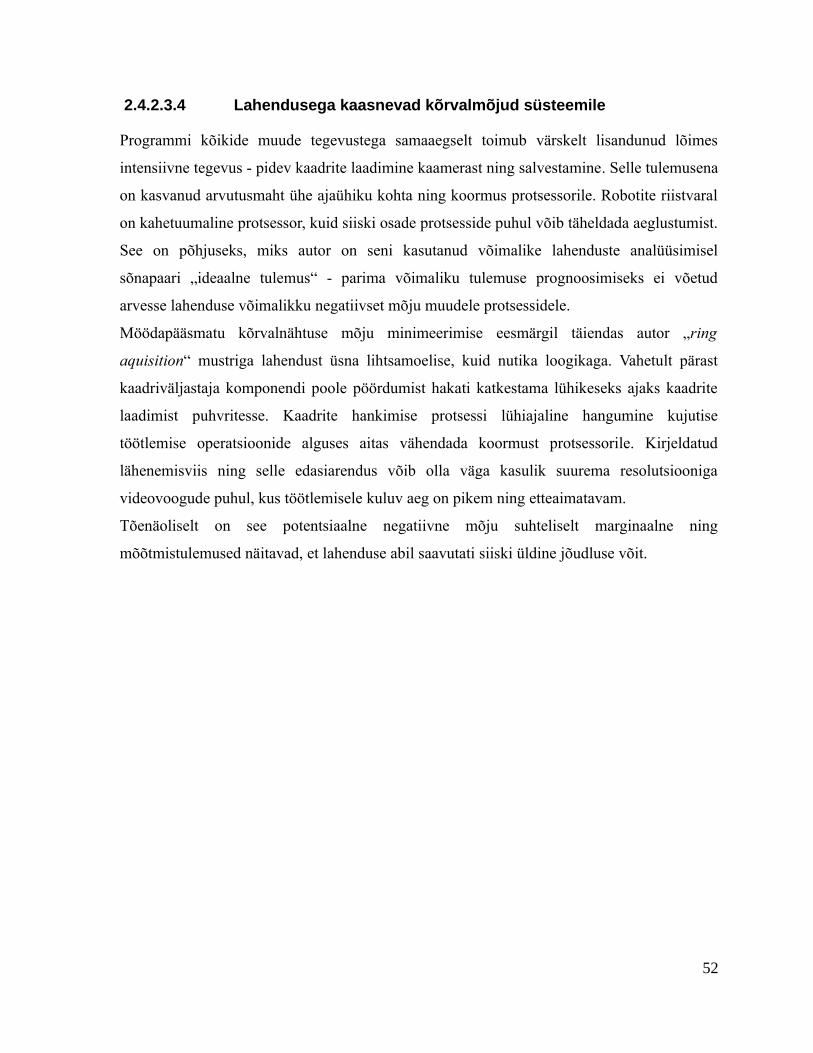
2.4.2.3.4 Lahendusega kaasnevad kõrvalmõjud süsteemile
Programmi kõikide muude tegevustega samaaegselt toimub värskelt lisandunud lõimes
intensiivne tegevus - pidev kaadrite laadimine kaamerast ning salvestamine. Selle tulemusena
on kasvanud arvutusmaht ühe ajaühiku kohta ning koormus protsessorile. Robotite riistvaral
on kahetuumaline protsessor, kuid siiski osade protsesside puhul võib täheldada aeglustumist.
See on põhjuseks, miks autor on seni kasutanud võimalike lahenduste analüüsimisel
sõnapaari „ideaalne tulemus“ - parima võimaliku tulemuse prognoosimiseks ei võetud
arvesse lahenduse võimalikku negatiivset mõju muudele protsessidele.
Möödapääsmatu kõrvalnähtuse mõju minimeerimise eesmärgil täiendas autor „ring
aquisition“ mustriga lahendust üsna lihtsamoelise, kuid nutika loogikaga. Vahetult pärast
kaadriväljastaja komponendi poole pöördumist hakati katkestama lühikeseks ajaks kaadrite
laadimist puhvritesse. Kaadrite hankimise protsessi lühiajaline hangumine kujutise
töötlemise operatsioonide alguses aitas vähendada koormust protsessorile. Kirjeldatud
lähenemisviis ning selle edasiarendus võib olla väga kasulik suurema resolutsiooniga
videovoogude puhul, kus töötlemisele kuluv aeg on pikem ning etteaimatavam.
Tõenäoliselt on see potentsiaalne negatiivne mõju suhteliselt marginaalne ning
mõõtmistulemused näitavad, et lahenduse abil saavutati siiski üldine jõudluse võit.
52
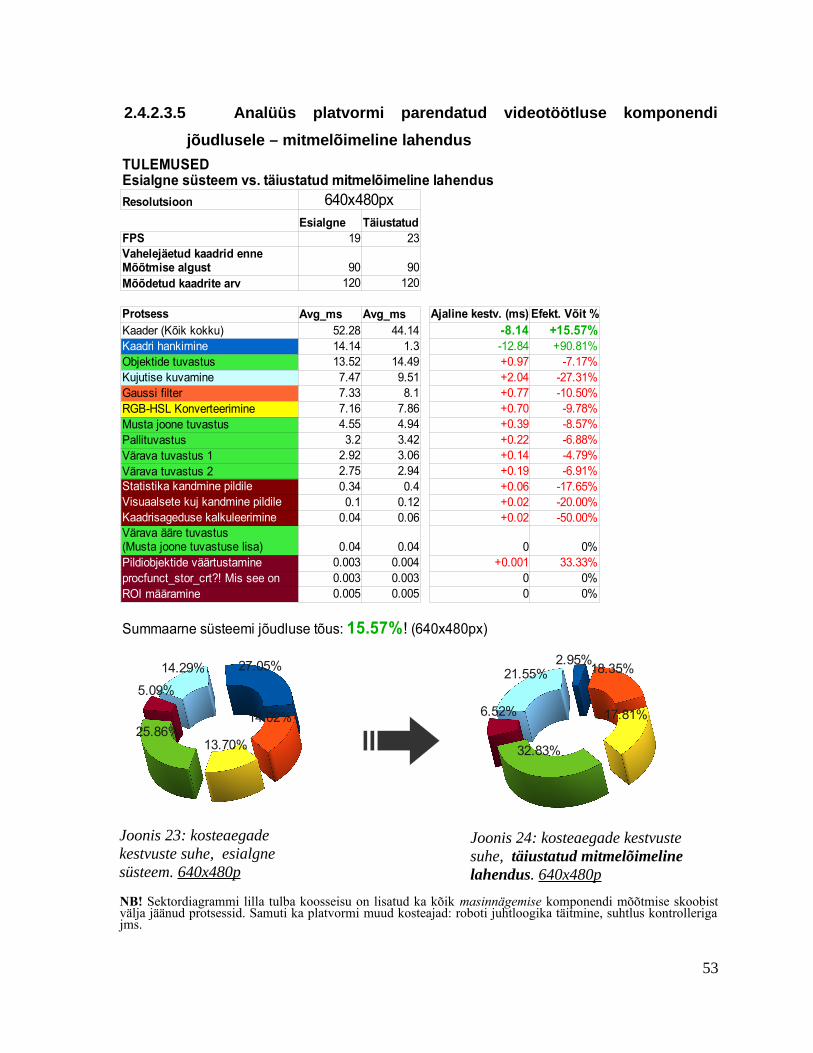
2.4.2.3.5 Analüüs platvormi parendatud videotöötluse komponendi
jõudlusele – mitmelõimeline lahendus
NB! Sektordiagrammi lilla tulba koosseisu on lisatud ka kõik masinnägemise komponendi mõõtmise skoobist välja jäänud protsessid. Samuti ka platvormi muud kosteajad: roboti juhtloogika täitmine, suhtlus kontrolleriga jms.
53
640x480px
FPS 19 23
90 90120 120
Avg_ms Avg_ms52.28 44.14 -8.14 +15.57%14.14 1.3 -12.84 +90.81%13.52 14.49 +0.97 -7.17%7.47 9.51 +2.04 -27.31%7.33 8.1 +0.77 -10.50%7.16 7.86 +0.70 -9.78%4.55 4.94 +0.39 -8.57%3.2 3.42 +0.22 -6.88%
2.92 3.06 +0.14 -4.79%2.75 2.94 +0.19 -6.91%0.34 0.4 +0.06 -17.65%0.1 0.12 +0.02 -20.00%
0.04 0.06 +0.02 -50.00%
0.04 0.04 0 0%0.003 0.004 +0.001 33.33%0.003 0.003 0 0%0.005 0.005 0 0%
TULEMUSEDEsialgne süsteem vs. täiustatud mitmelõimeline lahendus
Resolutsioon
Esialgne Täiustatud
Vahelejäetud kaadrid enne Mõõtmise algustMõõdetud kaadrite arv
Protsess Ajaline kestv. (ms) Efekt. Võit %Kaader (Kõik kokku)Kaadri hankimineObjektide tuvastusKujutise kuvamineGaussi filterRGB-HSL KonverteerimineMusta joone tuvastusPallituvastusVärava tuvastus 1Värava tuvastus 2Statistika kandmine pildileVisuaalsete kuj kandmine pildileKaadrisageduse kalkuleerimineVärava ääre tuvastus(Musta joone tuvastuse lisa)Pildiobjektide väärtustamineprocfunct_stor_crt?! Mis see onROI määramine
Summaarne süsteemi jõudluse tõus: 15.57%! (640x480px)
Joonis 23: kosteaegade kestvuste suhe, esialgne süsteem. 640x480p
27.05%
14.02%
13.70%25.86%
5.09%
14.29%
Joonis 24: kosteaegade kestvuste suhe, täiustatud mitmelõimeline lahendus. 640x480p
2.95%18.35%
17.81%
32.83%
6.52%
21.55%

NB! Sektordiagrammi lilla tulba koosseisu on lisatud ka kõik masinnägemise komponendi mõõtmise skoobist välja jäänud protsessid. Samuti ka platvormi muud kosteajad: roboti juhtloogika täitmine, suhtlus kontrolleriga jms.
54
640x240px
FPS 26 41
90 90120 120
Avg_ms Avg_ms37.13 24.12 -13.01 +35.04%14.42 1.2 -13.22 +91.68%7.04 7.04 0 0%4.17 4.23 +0.06 -1.44%3.81 3.89 +0.08 -2.10%4.88 4.96 +0.08 -1.64%2.45 2.48 +0.03 -1.22%1.45 1.46 +0.01 -0.69%1.61 1.59 -0.02 +1.24%1.41 1.4 -0.01 +0.71%0.37 0.35 -0.02 +5.41%0.06 0.07 +0.01 -16.67%0.04 0.05 +0.01 -25.00%
0.04 0.04 0 0%0.003 0.003 0 0%0.003 0.003 0 0%0.005 0.005 0 0%
TULEMUSEDEsialgne süsteem vs. täiustatud mitmelõimeline lahendus
Resolutsioon
Esialgne Täiustatud
Vahelejäetud kaadrid enne Mõõtmise algustMõõdetud kaadrite arv
Protsess Ajaline kestv. (ms) Efekt. Võit %Kaader (Kõik kokku)Kaadri hankimineObjektide tuvastusKujutise kuvamineGaussi filterRGB-HSL KonverteerimineMusta joone tuvastusPallituvastusVärava tuvastus 1Värava tuvastus 2Statistika kandmine pildileVisuaalsete kuj kandmine pildileKaadrisageduse kalkuleerimineVärava ääre tuvastus(Musta joone tuvastuse lisa)Pildiobjektide väärtustamineprocfunct_stor_crt?! Mis see onROI määramine
Summaarne süsteemi jõudluse tõus: 35%! (640x240px)
Joonis 25: kosteaegade kestvuste suhe, esialgne süsteem. 640x240p
38.84%
10.26%13.14%
18.96%
7.57%
11.23%
Joonis 26: kosteaegade kestvuste suhe, täiustatud mitmevooline lahendus. 640x240p
4.98%16.13%
20.56%
29.19%
11.61%
17.54%

Mõõtmistulemuste ülevaadeParendatud süsteemi mõõtmistulemused vastasid ootustele. Ilmnesid mitmed huvitavad
tendentsid.
Üldine
• Suurenenud arvutusmahud ning tõusnud koormus protsessorile avaldas negatiivset
mõju peaaegu kõikidele pealõimes kulgevatele allsüsteemidele. Õnneks uue
lahenduse aeglustav mõju teistele protsessidele on väga väike – enamuse protsesside
puhul praktiliselt tajumatu.
• Täiustatud allsüsteem on eraldi vaadeldavate protsesside seas nüüd lühima kosteajaga
(Eraldi vaadeldavad protsessid esinevad sektordiagrammides). Kolm kõige
aeglasemat allsüsteemi: Objektide tuvastus, kaadri kuvamine ning RGB-HSL
konversioon
Testid resolutsiooniga: 640x480px
• Kaadri hankimise ehk täiustatud allsüsteemi efektiivsus tõusis ~91%. Kosteaeg
vähenes ~13,2ms võrra ning on alla 1,5ms.
• Suurim efektiivsuse langus tabas kujutise kuvamise allsüsteemi. Ühe kaadri kuvamine
on muutunud ~2ms aeglasemaks (efektiivsus langes ~27,5%).
• Platvormi summaarne efektiivsus tõusis ~16%. Kaadrisagedus tõusis 4 kaadri
võrra ning on ~23fps.
Testid resolutsiooniga: 640x240px
• Kaadri hankimise ehk täiustatud allsüsteemi efektiivsus tõusis ~92%. Kosteaeg
vähenes ~13ms võrra ning on alla 1,5ms.
• Suurim efektiivsuse langus tabas gaussi filtri ning RGB-HSL konversiooni
allsüsteemi. Mõlemate protsesside kulgemine on muutunud ~0.1ms aeglasemaks. See
on väga väike erinevus. Võib öelda, et antud resolutsiooni puhul on negatiivne mõju
teistele süsteemidele minimaalne.
• Platvormi summaarne efektiivsus tõusis 35%. Kaadrisagedus tõusis 15 kaadri
võrra ning on ~41 fps.
55

2.4.3 Kujutise kuvamine – süsteemi paremaks jõudluseks
optimeeritud lahendus
Võrreldes teiste käsitletavate
protsessidega, kujutise väljatrükkimise
eripära seisneb selles, et see ei tekita
masinnägemise seisukohast mingit
väärtust. Robot ise liideses kuvatud pilti
ei kasuta. Reaalaja video mängimine on
kasulik masina loojatele: aitab mõista,
mida näeb robot. Roboti arendajad
kasutavad reaalset otsepilti roboti
ruumilise nägemise valemite loomisel,
värvitundlikkuse kalibreerimisel, roboti
testimisel ning roboti sihi etteandmisel
enne võistluse algust. Alates
momendist, kui mobiilne robot on
võistlustules ning liigub iseseisvalt
ringi, on kaadrite kuvamine ainult liigne koormus. Nagu on ilmnenud varasematest
mõõtmistulemustest – kaadrite kuvamine on üsna arvutusmahukas operatsioon, kuid
tõenäoliselt ei ole Botmaster platvormi loojad seda protsessi sellise pilguga testinud.
Lahendus
Autor realiseeris mõned triviaalsed täiendused. Uuendus seisneb selles, et alates roboti
väljumisest kõige esimesest, „stardivalmis“ olekust, kaadreid kuvatakse kas madala
sagedusega või ei kuvata üldse. Teisisõnu, videovoo kuvamine programmiliideses lõpetatakse
kohe, kui robot hakkab võistlusväljakul iseseisvalt tegelema. Väga lihtne lahendus võimaldab
roboti loojal/käivitajal enne stardisignaali kalibreerida tehisnägemise värvitaju ning viia läbi
muud visuaalsest vaateväljast olenevad seadistused. Samal ajal võistlustingimustes on roboti
efektiivsus kõrgem. Antud lahendus on arendaja poolt seadistatav. Näiteks testimise
eesmärgil on võimalik iga hetk jälle lülitada sisse kaadrite pidev kuvamine.
56
Joonis 27: Olenemata roboti juhtloogika keerukusest ning olekute arvust, kaadri kuvamine on otstarbekas ühes ainsas olekus – enne starti.

2.4.3.1.1 Analüüs platvormi parendatud videotöötluse komponendi
jõudlusele – optimeeritud kuvamise lahendus (+mitmelõimeline lah.)
NB! Sektordiagrammi lilla tulba koosseisu on lisatud ka kõik masinnägemise komponendi mõõtmise skoobist välja jäänud protsessid. Samuti ka platvormi muud kosteajad: roboti juhtloogika täitmine, suhtlus kontrolleriga jms.
57
640x480px
FPS 19 28
90 90120 120
Avg_ms Avg_ms52.28 34.96 -17.32 +33.13%14.14 0.77 -13.37 +94.55%13.52 14.6 +1.08 -7.99%7.47 0.003 -7.47 +99.96%7.33 7.46 +0.13 -1.77%7.16 9.32 +2.16 -30.17%4.55 5.14 +0.59 -12.97%3.2 3.36 +0.16 -5.00%
2.92 3.07 +0.15 -5.14%2.75 2.9 +0.15 -5.45%0.34 0.39 +0.05 -14.71%0.1 0.12 +0.02 -20.00%
0.04 0.04 0 0%
0.04 0.02 -0.020 +50.00%0.003 0.003 0 0%0.003 0.004 +0.001 -33.33%0.005 0.005 0 0%
TULEMUSEDEsialgne süsteem vs. täiustatud mitmelõimeline lahendus + optimeeritud kuvamise lahendus
Resolutsioon
Esialgne Täiustatud
Vahelejäetud kaadrid enne Mõõtmise algustMõõdetud kaadrite arv
Protsess Ajaline kestv. (ms) Efekt. Võit %Kaader (Kõik kokku)Kaadri hankimineObjektide tuvastusKujutise kuvamineGaussi filterRGB-HSL KonverteerimineMusta joone tuvastusPallituvastusVärava tuvastus 1Värava tuvastus 2Statistika kandmine pildileVisuaalsete kuj kandmine pildileKaadrisageduse kalkuleerimineVärava ääre tuvastus(Musta joone tuvastuse lisa)Pildiobjektide väärtustamineprocfunct_stor_crt?! Mis see onROI määramine
Summaarne süsteemi jõudluse tõus: 33,2%! (640x480px)
Joonis 29: kosteaegade kestvuste suhe, esialgne süsteem. 640x480p
27.05%
14.02%
13.70%25.86%
5.09%
14.29%
Joonis 28: kosteaegade kestvuste suhe, täiustatud mitmelõimeline lahendus + optimeeritud kuvamise lahendus. 640x480p
2.20%
21.34%
26.66%41.76%
8.03%0.01%
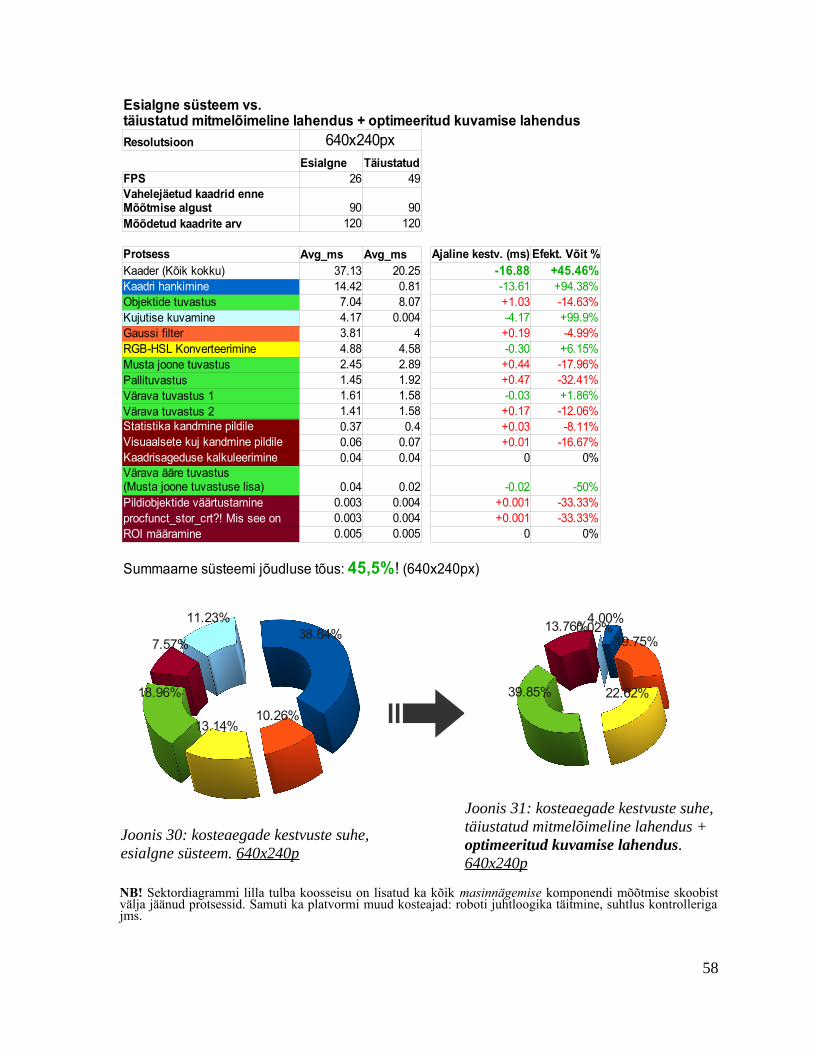
NB! Sektordiagrammi lilla tulba koosseisu on lisatud ka kõik masinnägemise komponendi mõõtmise skoobist välja jäänud protsessid. Samuti ka platvormi muud kosteajad: roboti juhtloogika täitmine, suhtlus kontrolleriga jms.
58
640x240px
FPS 26 49
90 90120 120
Avg_ms Avg_ms37.13 20.25 -16.88 +45.46%14.42 0.81 -13.61 +94.38%7.04 8.07 +1.03 -14.63%4.17 0.004 -4.17 +99.9%3.81 4 +0.19 -4.99%4.88 4.58 -0.30 +6.15%2.45 2.89 +0.44 -17.96%1.45 1.92 +0.47 -32.41%1.61 1.58 -0.03 +1.86%1.41 1.58 +0.17 -12.06%0.37 0.4 +0.03 -8.11%0.06 0.07 +0.01 -16.67%0.04 0.04 0 0%
0.04 0.02 -0.02 -50%0.003 0.004 +0.001 -33.33%0.003 0.004 +0.001 -33.33%0.005 0.005 0 0%
TULEMUSEDEsialgne süsteem vs. täiustatud mitmelõimeline lahendus + optimeeritud kuvamise lahendus
Resolutsioon
Esialgne Täiustatud
Vahelejäetud kaadrid enne Mõõtmise algustMõõdetud kaadrite arv
Protsess Ajaline kestv. (ms) Efekt. Võit %Kaader (Kõik kokku)Kaadri hankimineObjektide tuvastusKujutise kuvamineGaussi filterRGB-HSL KonverteerimineMusta joone tuvastusPallituvastusVärava tuvastus 1Värava tuvastus 2Statistika kandmine pildileVisuaalsete kuj kandmine pildileKaadrisageduse kalkuleerimineVärava ääre tuvastus(Musta joone tuvastuse lisa)Pildiobjektide väärtustamineprocfunct_stor_crt?! Mis see onROI määramine
Summaarne süsteemi jõudluse tõus: 45,5%! (640x240px)
Joonis 30: kosteaegade kestvuste suhe, esialgne süsteem. 640x240p
38.84%
10.26%13.14%
18.96%
7.57%
11.23%
Joonis 31: kosteaegade kestvuste suhe, täiustatud mitmelõimeline lahendus + optimeeritud kuvamise lahendus. 640x240p
4.00%
19.75%
22.62%39.85%
13.76%0.02%

Mõõtmistulemuste ülevaadeParendatud süsteemi mõõtmistulemused vastasid ootustele.
Üldine
• Täiustatud allsüsteem on eraldi vaadeldavate protsesside seas nüüd lühima
kosteajaga, sest mõõtmise ajal (testitakse roboti iseseisva tegevuse olekut) kosteaeg
peaaegu puudus (Eraldi vaadeldavad protsessid esinevad sektordiagrammides). Kolm
kõige aeglasemat allsüsteemi: Objektide tuvastus, RGB-HSL konversioon ning gaussi
filter.
Testid resolutsiooniga: 640x480px
• Kaadri hankimise ehk täiustatud allsüsteemi efektiivsus tõusis 99,9%. kosteaeg on
peaaegu olematu.
• Suurim efektiivsuse langus oli registreeritud objektide tuvastuse allsüsteemis.
Objektide tuvastamine on läinud ~1ms aeglasemaks (efektiivsus langes ~8%).
• Platvormi summaarne efektiivsus tõusis ~33%. Kaadrisagedus tõusis 9 kaadri
võrra ning on ~28 fps.
Testid resolutsiooniga: 640x240px
• Kaadri hankimise ehk täiustatud allsüsteemi efektiivsus tõusis ~99,9%. kosteaeg
on peaaegu olematu.
• Suurim efektiivsuse langus oli registreeritud objektide tuvastuse allsüsteemis.
Objektide tuvastamine on läinud ~1ms aeglasemaks (efektiivsus langes ~15%).
• Platvormi summaarne efektiivsus tõusis 45,5%. Kaadrisagedus tõusis 23 kaadri
võrra ning on ~49 fps.
59

3 Edaspidised väljavaated
Autor kavatseb pärast IT Kolledži lõpetamist jätkata tegevust robotiklubi liikmena ning
panustada organisatsiooni tulevikku. Eesmärgiks on jätkata klubi esindamist võistleja rollis
ning toetada ka uusi liikmeid jagades neile teadmisi ja kogemusi. Kindlasti on kavas jätkata
tööd seoses Botmaster platvormi täiendamisega. Väljakutsete seas on nii edastpidine
süsteemi funktsionaalsuse või jõudluse arengupotentsiaal, aga ka vajadus optimeerida
tarkvara ühildumiseks uute riistvaramoodulitega. Iga-aastaste rutiinide seas on vajadus lisada
või täiendada masinnägemise algoritme. Lõputöö sisukas analüüsi peatükk oli kirjutatud
lootusega luua tulevastele platvormi tehisnägemise komponendi arendajatele õppematerjal/
dokumentatsioon platvormi videotöötlemise kohta. Praktilise teostuse peatükk võib anda
ideid, kuidas analüüsida, realiseerida ning testida uusi lahendusi.
Järgnevad kaks alapeatükki annavad lühikese ülevaate edaspidistest väljavaadetest antud
lõputöö kontekstis – masinnägemise süsteemi seisukohast. Diplomitöö käigus tehtud
arvutused näitavad, et pärast rakendatud täiendusi on kosteaja poolest kõige aeglasemaks
allsüsteemiks jäänud objektide tuvastus. Autor on realiseerinud mitu põhjalikumalt testimata
prototüüpi, mis annavad lootust tõsta probleemse komponendi ning süsteemi summaarset
jõudlust veelgi.
60

3.1 Objektide tuvastus - binaarpiltide väärtustamise optimeeritud
lahendus
Autor teostas staatilise analüüsi Botmaster
platvormis realiseeritud objektide tuvastamise
algoritmidele ning funktsioonidele.
Abstraheerides masinnägemise komponendi
objektituvastuse funktsionaalsusi, võib
märgata, et nad kõik (erinevate objektide
tuvastamiseks on eraldiseisvad funktsioonid)
alluvad teatud mustrile ning sisaldavad
tüüpilisi samme. Mõned sammudest on
täielikult identsed – autor näeb selles
potentsiaali lahenduse efektiivsuse tõstmiseks.
Joonis 33 kirjeldab objektituvastuse
funktsioonides esinevaid samme. Punasega on
märgitud sammud, mis on identsed kõikide
objektide puhul. Rohelisega on märgitud
sammud, mille loogika on tihedalt seotud iga
konkreetse tuvastatava objekti tüübi individuaalse iseloomuga. Binaarpildi väärtustamise
sammus käiakse läbi kõik HSL värviruumis oleva kaadri pikslid ning algoritm valib välja
sobivamad. Aktsepteeritud pikslite asukohad kantakse binaarpildile, mis on sisendiks
järgnevale objektituvastamise loogikale. Praeguse implementatsiooni probleem seisneb
selles, et igat tüüpi objektide tuvastamiseks kontrollitakse kõik kaadri punktid iga kord uuesti
ning see on üsna mahukas protseduur. Autor panustab võimalusele eraldada (mainitud
funktsioonidest) binaarpildi väärtustamise funktsionaalsus ning teostada see vaid ühel korral
enne objektide tuvastamise funktsioonide väljakutsumist. Lahendus tähendaks seda, et ühe
sammuna käiakse läbi kõik HSL värviruumi kujutise pikslid (ainult üks kord kogu kaadri
kohta) ja luuakse eraldi binaarpildid kohe kõikidele objektituvastamise funktsioonidele.
61
Joonis 32: Lihtsustatud joonis tüüpilisest sammudest objektide tuvastamisel Botmaster platvormis

Lahenduse võlu seisneb selles, et mida rohkem erinevaid objekte on tarvis tuvastada
(ülesande suurem keerukus), seda suurem on efektiivsuse võit võrreldes praeguse süsteemiga.
62
Joonis 33: Võimalus teha tulevikus objektide tuvastamine veel efektiivsemaks. Illustreeriv näide kahe erinevat tüüpi objektide tuvastamisega
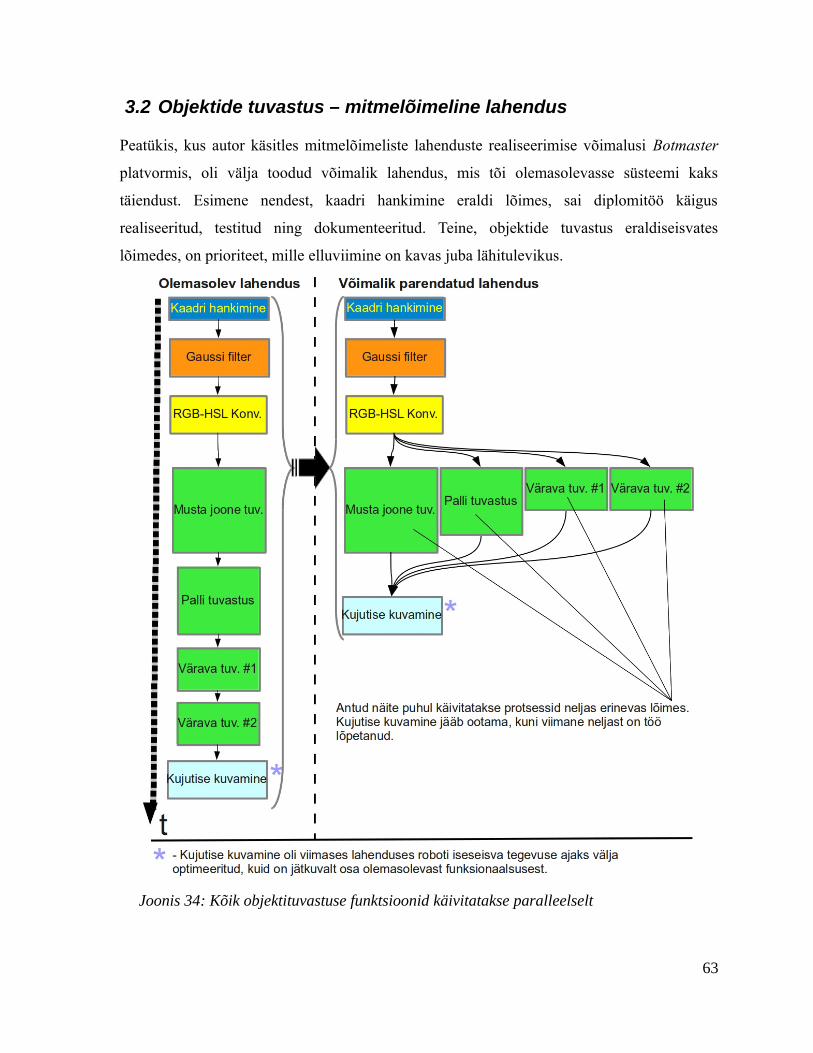
3.2 Objektide tuvastus – mitmelõimeline lahendus
Peatükis, kus autor käsitles mitmelõimeliste lahenduste realiseerimise võimalusi Botmaster
platvormis, oli välja toodud võimalik lahendus, mis tõi olemasolevasse süsteemi kaks
täiendust. Esimene nendest, kaadri hankimine eraldi lõimes, sai diplomitöö käigus
realiseeritud, testitud ning dokumenteeritud. Teine, objektide tuvastus eraldiseisvates
lõimedes, on prioriteet, mille elluviimine on kavas juba lähitulevikus.
63
Joonis 34: Kõik objektituvastuse funktsioonid käivitatakse paralleelselt

4 Lõputöö tulemus
Diplomitöö tulemusena:
• Valmis põhjalik tehniline analüüs Botmaster platvormi masinnägemise komponendile.
Lõputöö peatükk 1 sobib õppematerjaliks ning dokumentatsiooniks platvormi
tulevastele arendajatele, kes soovivad keskenduda videotöötluse funktsionaalsuste
täiendamiseks.
• Töötati välja mugav ning usaldusväärne videotöötluse jõudluse mõõtmise metoodika
ning automatiseeritud mõõtmisvahend. Realiseeritud automaattestimise raamistik
võib olla kasutatav tulevikus ka muude ülilühikeste kosteaegadega (0.001-99ms)
süsteemide komponentide jõudluse testimiseks.
• Püstitati kolm hüpoteesi platvormi ning selle tehisnägemise komponendi
allsüsteemide jõudluse tõstmise võimalikkusest.
• Süsteemi täiustati kahe uuendusega, mis parandasid platvormi jõudlust. Tänu
implementeeritud täiendustele, kaks püstitatud hüpoteesi osutusid õigeks.
• Pandi paika edaspidine plaan Botmaster platvormi videotöötluse komponendi
arenduseks. Plaan sisaldab konkreetseid väljapakutuid lahendusi mille realiseerimine
ning testimine annab vastuse kolmandale lõputöös püstitatud hüpoteesile.
Lõputöö eesmärk ehk "Botmaster" platvormi masinnägemise komponendi jõudluse
tõstmine, sai edukalt täidetud. Realiseeritud lahendused aitasid tõsta platvormi jõudlust
kuni 45,5%.
64

5 Kokkuvõte
Diplomitöös lahendatavaks probleemiks on arvutusmahuka ja ajakuluka masinnägemise
komponendi jõudlus ning selle piirav mõju mobiilsete robotite üldisele reageerimisvõimele
ning liikumiskiirusele. Videotuvastuse komponent on osa EIK Robootikaklubi
juhtimisplatvormist Botmaster. Botmaster platvorm on EIK Robootikaklubi poolt disainitud,
aastaid arendatud ning aktiivses kasutuses olev paindlik robootikaplatvorm. Platvormi
kasutavad erinevad rahvusvahelisel robotivõistlusel osalevad robotid. Video töötlemine
reaalajas on kaameraga varustatud robotitele esmaseks sisendiks ümbritseva keskkonna kohta
ning roboti juhtloogika täidab käske vastavalt pilditöötluse väljundile. Sellest tulenevalt
piirab platvormi tehisnägemise komponent olulisel määral roboti summaarset jõudlust.
Madala kaadrisagedusega videotuvastus ei võimalda robotitel reageerida kiirelt muutustele
ümbruskonnas ning kontrollida ennast adekvaatselt suurtel sõidukiirustel. Samuti on madala
kaadrisageduse puhul raske optimeerida roboti liigutuste iseloomu ning vältida eksimuse
võimalusi.
Diplomitöö eesmärgiks oli Botmaster platvormi videotuvastuse jõudluse suurendamine, et
parandada platvormi kasutatavate robotite latentsust. Pildi hankimiseks, töötlemiseks ning
65

objektide tuvastamiseks kuluv lühem kosteaeg annaks EIK robotitele hea eelise teiste
võistlustel konkureerivate robotite ees.
Diplomitöö käigus analüüsis autor probleemi ning uuris mujal maailmas analoogsete
probleemide lahendamiseks kasutatud meetodeid. Ühtlasi töötas autor välja mugava
metoodika Botmaster platvormi videotuvastuse komponendi jõudluse mõõtmiseks ning
analüüsimiseks. Spetsiaalse automatiseeritud mõõtmisvahendi loomine oli osa praktilisest
teostusest. Loodud jõudluse automaattestimise raamistik on väga täpne ning sobib
kasutamiseks ka muude lühikeste kosteaegade mõõtmiseks (<1s). Botmaster platvormi
videotuvastuse komponent jaotati detailselt eraldiseisvateks operatsioonideks. Analüüsimisel
mõõdeti iga kaardistatud protsessi kosteaegu ja selle tulemusena leiti operatsioonid, mida
tasub täiustada. Püstitati kolm hüpoteesi erinevate masinnägemise allsüsteemide kohta: EIK
Robootikaklubi roboti platvormi Botmaster videotuvastuse süsteemis esineb mitmeid
operatsioone, mida on võimalik ning tasub täistada. Eeldatavaks tulemuseks oli roboti
videotöötluse jõudluse kasv, mis väljendub roboti masinnägemise kaadrisageduse tõusus.
Pakuti välja detailsed lahendused platvormi täiustamiseks nii antud diplomitöö raames kui ka
edaspidistes arenduse iteratsioonides. Neljas väljapakutud uuenduses olid aluseks:
protsesside paralleelne täitmine eraldi lõimedes, algoritmide optimeerimine ning vabanemine
liigsetest operatsioonidest. Peale parenduste realiseerimist mõõdeti samades tingimustes ning
samal riistvaral töötava Botmaster platvormi tehisnägemise komponendi kosteaega uuesti.
Mõõtmise käigus selgus, et väljapakutud parendused avaldasid jõudlusele positiivset mõju
ning masinnägemise efektiivsus paranes.
Diplomitöös püstitatud hüpoteesid osutusid õigeks ning seatud eesmärgid said täidetud.
Diplomitöö autoril õnnestus ideaalsetes tingimustes tõsta platvormi efektiivsust kuni 45,5%.
Tegemist on EIK Robootikaklubi jaoks pidevas täiustamisfaasis oleva platvormiga. Autor
seadis paika plaanid seoses edaspidiste süsteemi täiendustega. Botmaster platvormi ning selle
videotöötluse rakenduse arendamine jätkub ka pärast käesoleva diplomitöö valmimist ning
autor kavatseb ka tulevikus uuringutega jätkata ning anda edasi teadmised uutele klubi
liikmetele.
66

6 Enhancement of Real-time Video Processing
Performance based on Estonian Information
Technology College Robotics Club Botmaster Platform
The purpose of this diploma thesis was to increase the performance of real-time video
processing system used in robotics. The system has been developed specially for autonomous
mobile robots based on The Estonian Information Technology College (ITC) robot control
platform called Botmaster. The machine vision feature performs computationally intensive
and time-consuming processes that set limits to overall robots' responsiveness and achievable
moving speeds. Botmaster robot control platform is a flexible software framework designed
by EIC Robotics Club. It has been developed for many years and is being actively used on
different purpose robots that compete on international robotics competitions. Real-time video
processing is the main informational input for high level robots equipped with digital camera.
Robot control logic layer generates behavior commands in accordance with the output of
computer vision component. Therefore the machine vision feature significantly constraints
the overall robot performance. Low framerate does not allow to gain rapid reaction time upon
changes in surrounding environment or obtain stability and control over robot on high
speeds. In addition, low framerate makes it very complicated to optimize the nature of robot's
movements and avoid mistakes robot's behavior.
67

Better latency of frame capture, image processing and object detection would provide an
advantage for EIC robots over other competitive machines.
During the thesis, author analyzed the problem and investigated best practises being used to
solve similar system enhancement challenges around the world. In addition, author
developed a convenient methodology for measurement and analysis of computer vision
performance in Botmaster platform. The design of special automated measurement tool was a
part of the practical realization in this thesis. Created performance automated-testing
framework is extremely accurate (nanosecond precision) and can be used for measuring rapid
latencies (<1s) in other systems. The machine vision component was split in detail into many
separate operations. Every single process and its latency were analysed – several operations
that must be improved were pointed out. Hypoteses were proposed about machine vision
component's sub-processes: computer vision component in Botmaster robot control platform
contains several operations that can and must be improved. An expected result was to achieve
growth in real-time video processing efficiency that would lead to higher framerate of
machine vision.
Author provided detailed system improvement solutions for implementation during this
particular thesis and in future development iterations. Proposed enhancement updates were
based on: concurrent execution of processes in separate threads, optimization of algorythms
and displacement of unnecessary operations. The development of provided solutions was
followed by performance measurement of the system again. Tests were executed in similar
conditions and on the same hardware as the initial system. Performance testing results
displayed that proposed solutions caused positive impact on real-time video processing
performance and efficiency of machine vision had been increased.
Hypotheses proposed in this thesis were proved to be correct and established goal was
achieved. The author of this diploma thesis succeeded in increasing the overall effectiveness
of platform in ideal conditions by approximately 45,5%.
The platform is being continuously techincally complemented by EIC Robotics Club. Author
has arranged development plans for near future. The development of Botmaster platform and
68

its machine vision component will be continued after completion of this thesis and author is
intending to continue researches and provide knowledge to new robotics club members and
developers.
69

7 Kasutatud allikad
1. Silver Kuusik, Eesti Infotehnoloogia Kolledži Robootikaklubi roboti juhtimisplatvormi täiustamine. (2011) Eesti Infotehnoloogia Kolledž, Eesti
2. Ingliskeelsete info- ja sidetehnoloogia terminite seletav sõnaraamat (25.05.2013). [www.vallaste.ee]
3. Intel® Corporation: Intel Image Processing Library - Quick Reference, (1997).
4. Alexander Hornberg (2006). Handbook of Machine Vision. WILEY-VCH Verlag Gmbh & Co KGaA: Weinheim, Germany.
5. Matrox Machine vision, image analysis and medical imaging software development kit (25.05.2013). [http://www.matrox.com/imaging/en/products/software/mil/]
6. Robert Love (2007). Linux System Programming: Talking Directly to the Kernel and C Library. O'Reilly Media: Sebastopol, CA, United States of America.
7. Christopher G. Lasater (2007). Design Patterns. Worldware Publishing, Inc.: Plano, United States of America.
8. Eesti Infotehnoloogia Kolledži Robootikaklubi. Saavutused (24.05.2013). [http://robot.itcollege.ee/?q=node/5]
9. Robotex: Where brains and metal meet (24.05.2013). [www.robotex.ee]
10. Robovision (24.05.2013). [http://wiki.itcollege.ee/index.php/Robovision]
11. Gary Bradski and Adrian Kaehler (2008). Learning OpenCV: Computer Vision with the OpenCV Library. O’Reilly Media, Inc.: Sebastopol, California, United States of America.
70

12. Kujutis: PD Photo.org - Royalty Free, Public Domain, Stock Photos: Grant Tetons Barns (23.05.2013). [http://pdphoto.org/PictureDetail.php?mat=pdef&pg=8145]
13. Mats Röjne (2003). Digital-TV via Mark, Satellit och Kabel. Studentlitteratur: Stockholm, Sweden.
14. Pakhira Malay K (2010). Computer Graphics, Multimedia And Animation. PHI Learning: Kalyani, West Bengal.
15. Kujutis: Arvuti graafika blogi: RGB_varvimudel.jpg (23.05.2013). [http://kristjanigraafika.blogspot.se/2011/01/raster-ja-vektor-varvid.html]
16. Kujutis: Wikimedia Commons, the free media repository: Hsl-hsv models.svg (24.05.2013). [http://commons.wikimedia.org/wiki/File:Hsl-hsv_models.svg]
17. Scott E. Umbaugh (2011). Digital Imaging Processing and Analysis: Human and Computer Vision. Taylor & Francis Group, LCC: Boca Raton, United States of America.
18. Intel Corporation, Willow Garage, Itseez: OpenCV v2.1 documentation, (23.05.2013). [http://opencv.willowgarage.com/documentation/c/genindex.html]
19. Ps3eye Linux (23.05.2013). [https://wiki.itcollege.ee/index.php/Ps3eye_Linux]
20. Kujutis: Photography 101 - Shutter speed, ISO and the exposure triangle: iso_settings_example3.jpg (24.05.2013). [http://zeebytes.blogspot.se/2012/09/photography-101-shutter-speed-iso-and.html]
21. Kujutis: Wikimedia Commons, the free media repository: Halftone,_Gaussian_Blur.jpg (24.05.2013). [http://commons.wikimedia.org/wiki/File:Halftone,_Gaussian_Blur.jpg]
22. Nick D'Ademo: Qt-Opencv-Multithreaded Documentation, (25.05.2013). [http://code.google.com/p/qt-opencv-multithreaded/wiki/Documentation]
23. Bo I. Sandén (2011). Design of Multithreaded Software: The Entity-Life Modeling Approach. John Wiley & Sons Inc.: Hoboken, New Yersey, United States of America.
24. Henry H. Liu (2009). Software Performance and Scalability: A Quantitative Approach. John Wiley & Sons, Inc.: Hoboken, New Jersey, United States of America.
25. Maurizio Gabbrielli, Simone Martini (2010). Programming Languages: Principles and Paradigms. Springer-Verlag: London, England.
26. Mark Summerfield (2010). Advanced Qt Programming: Creating Great Software with C++ and Qt 4. Prentice Hall: New Jersey, United States of America.
27. Digia, Nokia: Qt 4.8 Documentation: QThread Class Reference, (25.05.2013). [http://qt-project.org/doc/qt-4.8/qthread.html]
71