El-MASINOS- knyga
189
KLAIPĖDOS UNIVERSITETAS, JŪRŲ TECHNIKOS FAKULTETAS ELEKTROTECHNIKOS KATEDRA ELEKTROS MAŠINOS PASKAITŲ KONSPEKTAS elektros inžinerijos bakalaurams 5 KREDITAI Paruošė Loreta Simanynienė 2007
-
Upload
tomas-zaburas -
Category
Documents
-
view
3.475 -
download
45
Transcript of El-MASINOS- knyga
KLAIPĖDOS UNIVERSITETAS, JŪRŲ TECHNIKOS FAKULTETAS
ELEKTROTECHNIKOS KATEDRA
ELEKTROS MAŠINOS
PASKAITŲ KONSPEKTAS elektros inžinerijos bakalaurams
5 KREDITAI
Paruošė Loreta Simanynienė
2007

2TURINYS - PROGRAMA
Literatūra 4 Klausimai savikontrolei 4 Minimalūs klausimai savikontrolei 8 Priešistorė 10 Teorinio kurso įžanga 11
I. Nuolatinės srovės generatoriai 13 1. Įžanga. Nuolatinės srovės mašinų veikimo principas 13 2. Nuolatinės srovės mašinų konstrukcija 14 3. Inkaro apvijų sudarymo principas 51 4. Nuolatinės srovės mašinų inkaro reakcija 16 5. Inkaro apvijos elektrovara 20 6. Nuolatinės srovės mašinos sukimo momentas (elektromagnetinis momentas) 20 7. Generatoriaus ir variklio įtampų balanso lygtis 21 8. Nuolatinės srovės generatoriai ir jų charakteristikos 23 9. Svetimojo žadinimo generatorius ir jo charakteristikos 24 10. Lygiagrečiojo žadinimo generatorius ir jo charakteristikos 31 11. Nuosekliojo žadinimo generatorius ir jo charakteristikos 34 12. Mišriojo žadinimo generatorius ir jo charakteristikos 35 13. Lygiagretus nuolatinės srovės generatorių darbas 37
II. Nuolatinės srovės varikliai 39 14. Nuolatinės srovės elektros varikliai 39 15. Lygiagrečiojo arba svetimojo žadinimo variklio charakteristikos 40 16. Nuosekliojo žadinimo variklio charakteristikos 42 17. Mišriojo žadinimo variklio charakteristikos 43 18. Sukimo momentų balansas ir stabilaus variklių darbo sąlyga 43 19. Variklių paleidimas 45 20. Nuolatinės srovės variklių greičio reguliavimas 46 21. Elektros variklių elektrinis stabdymas 48 III. Elektros mašinų magnetinė sistema 53 22.Nuolatinės srovės mašinų magnetinė grandinė ir jos skaičiavimas 53 23. Oro tarpo, dantų sluoksnio, inkaro jungo, polių, statoriaus jungo magnetinė įtampa 56 24. Nuolatinės srovės mašinos įmagnetinimo charakteristika 60 IV. 25. Srovės komutacija 61 V. Nuolatinės srovės mašinų inkaro apvijos 68 26. Paprastoji kilpinė apvija. Sudėtinė kilpinė apvija 69 27. Paprastoji banginė apvija. Sudėtinė banginė apvija. Specialiosios banginės apvijos. 78 28. Apvijos simetrijos sąlygos. 87 29. Išlyginantieji sujungimai. 87 30. Nuolatinės srovės mašinų nuostoliai ir naudingumo koeficientas. 90 31. Mašinų įšilimas ir aušinimas 91
VI. Transformatoriai 94 32. Sandara, veikimas 94 33. Transformatoriaus elektrovara 97 34. Lygtys, atstojamoji schema ir vektorinės diagramos 97 35. Redukuotojo transformatoriaus parametrai 99 36. Redukuotojo transformatoriaus lygtys 99 37. Transformatoriaus tuščiosios veikos bandymas 101 38. Transformatoriaus trumpojo jungimo bandymas 103 39. Supaprastintos transformatoriaus vektorinės diagramos ir atstojamosios schemos 105 40. Antrinės įtampos kitimas 105
341. Trifaziai transformatoriai, jų įmagnetinimo srovės. 106
Įmagnetinimo srovės aukštesnės harmonikos 42. Transformatoriaus apvijų jungimo grupės 109 43. Nesimetrinė trifazių transformatorių apkrova 114 44. Pereinamieji procesai transformatoriuose. Viršįtampiai. 116 45. Specialieji transformatoriai 118 VII. Kintamosios srovės mašinos: asinchroninės mašinos 120 46. Asinchroninės narvelinės mašinos sandara 120 47. Kintamosios srovės mašinų apvijos: trifazės viensluoksnės, dvisluoksnės 121 48. Žingsnio sumažinimo, apvijos paskirstymo, griovelių įstrižumo koeficientai 125 49. Apvijų magnetovarą 126 50. Trifazis sukamasis magnetinis laukas 127 51. Trifazis dviejų polių porų besisukantis laukas 129 52. Dvifazis (nesimetrinis) sukamasis magnetinis laukas 129 53. Pulsuojamasis laukas 130 54. Asinchroninių mašinų veikimo principas (variklis, generatorius, stabdys) 131 55. Rotoriaus magnetinis laukas 133 56. Trifazė asinchroninė mašina su sustabdytu rotoriumi. 134
Elektrovara ir transformacijos koeficientai. Lygtys, atstojamoji schema, vektorinė diagrama. Įtampų ir magnetovarų pusiausvyros lygtys. Naudojimas.
57. Asinchroninė mašina su besisukančiu rotoriumi. Besisukančio ir sustabdyto 140 AM rotoriaus parametrų palyginimas. Pagrindinės lygtys ir atstojamosios schemos
58. Asinchroninių mašinų darbo režimai: variklio, generatoriaus, stabdymo 142 59. Asinchroninio variklio sukimo momentai ir charakteristikos. 143
AV energijos balansas. AM sukimo momentai. AV paleidimo momentas. AV darbo charakteristikos. AM srovių apskritiminė diagrama. AV apskritiminės diagramos braižymas iš t.v. ir tr. j. bandymų
60. Asinchroninių variklių paleidimas 151 61. Asinchroninių variklių greičio reguliavimas 153 62. Asinchroninių variklių stabdymas 156 63. Vienfaziai asinchroniniai varikliai. Elektromagnetinis momentas. 158
Paleidimas. Universalieji AV.AV su viena faze statoriuje 64. Specialiosios asinchroninės mašinos. AM su giliais grioveliais. 162
Dvigubo narvelio asinchroninis variklis. AM su feromagnetiniu rotoriumi. Valdomieji AV
VIII. Sinchroninės mašinos 168 65. Generatoriaus ir variklio režimas. 169 66. Sinchroninės mašinos inkaro reakcija, esant 3 būdingiausioms apkrovoms. 170 67. Sinchroninės mašinos įtampos lygtys, vektorių diagramos: generatoriaus
režimas supaprastintam ir nesupaprastintam variantui 174 68. Sinchroninio generatoriaus, dirbančio pavieniui, charakteristikos 177 69. Sinchroninių generatorių lygiagretus darbas ir SG darbas lygiagrečiai galingam tinklui 179 70. Kampinė charakteristika 182 71. Sinchroninio generatoriaus “V” charakteristikos 184 72. Sinchroninio variklio vektorinės diagramos atvejai 185 73. Sinchroninio variklio aktyvioji galia ir sukimo momentas. “V” kreivės 187 74. Sinchroninio variklio darbo charakteristikos 188 75. Sinchroninio variklio paleidimas 188 76. Specialiosios paskirties elektros mašinų apžvalga. 189
4
Literatūra
1. S. Marazas, Elektros mašinos 1d., 1989.304 p.; 2. S. Masiokas, Elektrotechnika (elektros mašinų skyriai), 1989 ir vėlesnės laidos, 423p.; 3. A. I. Voldek, Elektros mašinos, Leningradas, Energija,1978, 832p. (rusų klb.); 4. P. Kostrauskas, Elektros mašinos (Transformatoriai), K, KPI,1990 - 79p.; 5. P. Kostrauskas,Nuolatinės srovės elektros mašinos, KTU, Kaunas, “Technologija”, 1993, 94p.; 6. P. Kostrauskas, Asinchroninės elektros mašinos, KTU, Kaunas, “Technologija”, 1995, 115p.; 7. P. Kostrauskas, Sinchroninės elektros mašinos, KTU, Kaunas, “Technologija”, 2002, 107p.; 8. S. Gečys, A. Kalvaitis, Elektros mašinos, Laboratoriniai darbai, KTU, Kaunas, “Technologija”,
2002, 107p.; 62p.; 9. G. Rinkevičius, A. Simutis, Elektros mašinų parametrų ir charakteristikų nustatymas, KTU,
Kaunas, “Technologija”, 1999, 99p.; 10. M.M. Kacman, Elektros mašinos (rusų klb.)M., 2003, 469p. 11. I.P. Kopylov, Elektros mašinos, M., 2004,607p. (rusų klb.); 12. I.P. Kopylov, Elektros mašinų matematinis modeliavimas, M., 2001,327p. (rusų klb.)
KLAUSIMAI SAVIKONTROLEI 1. Nuolatinės srovės generatoriai
1.1. Nuolatinės srovės mašinos konstrukcija 1.2. Parašykite induktyviosios elektros mašinos elektrovaros formulę (elektromagnetinės indukcijos
dėsnis) 1.3. Kas tai yra mašinos geometrinė neutralė? 1.4. Kas tai yra inkaro reakcija ir kaip ji veikia pagrindinį mašinos magnetinį lauką? 1.5. Kur stengiamasi statyti šepečius? 1.6. Kaip mažinama inkaro reakcijos įtaka komutacijai? 1.7. Parašykite elektrovaros formulę. 1.8. Parašykite nuolatinės srovės generatoriaus įtampų balanso lygtis, galių balansą. 1.9 Parašykite nuolatinės srovės variklio įtampų balanso lygtis, galių balansą. 1.10 Kokias eksperimentines charakteristikas reikia turėti, norint sudaryti charakteringąjį trikampį ir ką
jis nusako, kaip jis sudaromas? 1.11. Nubraižykite nuolatinės srovės generatoriaus pagrindines charakteristikas. 1.12. Kaip palaikyti nuolatinės srovės generatoriaus įtampą pastovią, didėjant apkrovos srovei? 1.13. Kokios yra lygiagretaus žadinimo generatoriaus susižadinimo sąlygos?

51.14. Nubrėžkite svetimo ir lygiagretaus žadinimo generatorių išorines charakteristikas ir palyginkite
jas.
2. Nuolatinės srovės varikliai 2.1.Veikimo principas 2.2. Parašykite elektromagnetinės galios formulę. 2.3. Parašykite elektromagnetinio momento formulę. 2.4. Nubraižykite nuolatinės srovės variklio atstojamąją schemą ir parašykite, kam lygi :a) įtampa ant
išorinių variklio gnybtų; b) galios lygtį. 2.5 .Parašykite lygiagretaus (ar svetimo) žadinimo variklio greičio charakteristikos analitinę išraišką ir
nubraižykite greičio charakteristiką (natūralią ir veikiant inkaro reakcijai). 2.6.Parašykite lygiagretaus žadinimo variklio mechaninės charakteristikos analitinę išraišką ir
nubraižykite mechaninę charakteristiką [a) natūralią, b) esant įjungtai inkaro varžai, c) keičiant srautą, d) sumažinus įtampą].
2.4. Parašykite nuoseklaus žadinimo variklio mechaninės charakteristikos analitinę išraišką ir nubraižykite mechaninę charakteristiką.
2.5. Kokia variklių stabilaus darbo (padidėjusių greičių srityje) sąlyga? 2.7.Kokios šių variklių greičio reguliavimo galimybės? Paremkite charakteristikomis. 2.8. Kaip elektriškai stabdomi nuolatinės srovės varikliai (pagrįskite charakteristikomis)? 2.9. Kur ir dėl kokių savybių panaudojami nuolatinės srovės varikliai?
3. Nuolatinės srovės elektros mašinų magnetinė grandinė
3.1. Koks magnetinės grandinės skaičiavimo tikslas? 3.2. Kokiu dėsniu vadovaujantis skaičiuojamos magnetinės grandinės? 3.3. Parašykite formulę, rodančią ryšį tarp induktoriaus žadinimo srovės, magnetovaros ir dviejų polių
vijų skaičiaus. 3.4. Nubraižykite nuolatinės srovės mašinos įmagnetinimo charakteristiką. 3.5. Kokie magnetinės grandinės pradiniai parametrai turi būti žinomi ir koks parametras ieškomas? 3.6. Kuri mašinos magnetinės grandinės dalis turi didžiausią magnetinę varžą? 3.7. Nuo ko priklauso plieninių magnetinės grandinės dalių magnetinė varža? 3.8. Ką vadina magnetine įtampa? 3.9. Kaip skaičiuojamas magnetinio srauto tankis B, kai žinomas srautas (formulė)? Kokios jų
dimensijos? 3.10. Parašykite magnetinio lauko stiprio H formulę (kaip jis siejasi su B, kokia jo dimensija? 3.11. Kas tai yra magnetinio lauko stipris? 3.12. Kokia formule skaičiuojamas oro tarpo magnetinė įtampa?
4. Srovės komutacija
4.1 Kas tai yra „srovės komutacija“? 4.2 Kokia žinote komutacijos rūšis 4.3 Kaip galima pagerinti komutaciją? 4.4 Ką vadina „komutacijos laiku“?
5. Nuolatinės srovės elektros mašinų inkaro apvijos 5.1 Ką vadiname sekcija? 5.2 Iš ko susideda sekcija? 5.3 Ką vadiname elementariuoju grioveliu? 5.4 Ką vadiname poliaus žingsniu? 5.5 Kokias žinote apvijų rūšis? 5.6 Kas nulemia lygiagrečių šakų kiekį? 5.7 Ką nulemia lygiagrečių šakų kiekis? 5.8 Kur turi būti išdėstyti šepečiai? 5.9 Nuo ko priklauso evj kryptis? 5.10 Vienos lygiagretės šakos evj lygi 100V. Kam lygi visos mašinos evj?

65.11 . Vienos lygiagretės šakos srovė 5 A. Lygiagrečių šakų skaičius 4. Kam lygi mašinos inkaro
srovė? 5.12 . Kada reikės numatyti didelį lygiagrečių šakų skaičių? 5.13 . Paprastosios kilpinės apvijos lygiagrečių šakų skaičius 2a = 4. Kiek toje mašinoje bus polių? 5.14 . Kada patogiau naudoti sudėtinę kilpinę apviją? 5.15 . Ar galima sudaryti ir kilpinę paprastąją ir sudėtinę apviją, esant bet kuriam griovelių skaičiui? 5.16 . Kaip sujungia šepetys apvijas sudėtinėje kilpinėje apvijoje, lygiagrečiai ar nuosekliai? 5.17 . Kam visada lygus šepečių kiekis kilpinėje apvijoje (tiek paprastojoje, tiek ir sudėtingoje)? 5.18 . Koks skirtumas tarp paprastosios ir sudėtinės banginių apvijų. ? 5.19 . O kaip išoriškai jas atskirti? 5.20 . Kaip skirstomas elektros mašinų darbo režimas pagal mašinos temperatūrą? 5.21 . Kas nulemia leistiną elektros mašinos darbo temperatūrą? 5.22 . Kas nustato izoliacijos temperatūrą? 5.23 . Kiek metų siekia izoliacijos amžius? 5.24 . Kokie yra elektros mašinų aušinimo būdai?
6. Transformatoriai
6.1. Kas tai yra transformatorius? 6.2. Kuo pagrįstas transformatoriaus veikimas? 6.3. Kaip skirstomi transformatoriai? 6.4. Transformatoriaus veikimo principas 6.5. Parašykite transformacijos koeficiento visas Jums žinomas išraiškas. 6.7. Kokį transformatorių vadina redukuotu? 6.8. Parašykite transformatoriaus elektrovaros defektinės vertės išraišką. 6.9. Parašykite redukuotojo transformatoriaus įtampų balanso ir magnetovarų lygtis ir nubraižykite
atstojamąją schemą. 6.10. Nubraižykite redukuoto transformatoriaus vektorinę diagramą, kai apkrova aktyvioji, aktyviai
induktyvioji, talpinė. 6.11. Ką sužinome iš transformatoriaus tuščiosios veikos bandymo? 6.12. Ką sužinome iš transformatoriaus trumpojo jungimo bandymo? 6.13. Kaip kinta antrinė įtampa, augant apkrovos srovei, priklausomai nuo apkrovos pobūdžio? 6.14. Ką parodo transformatoriaus apvijų jungimo grupės? 6.15. Kaip žymimos jungimo grupės 6.16.Kokius žinote specialiuosius transformatorius? 6.17. Kuo skiriasi transformatorius nuo autotransformatoriaus?
7. Asinchroninės mašinos
7.1. Asinchroninio variklio veikimo principas. 7.2. Kokios būtinos sąlygos sukamajam laukui sukurti? 7.3. Parašykite statoriaus magnetinio lauko sukimosi greičio formulę. 7.4. Kada statoriuje susikuria pulsuojamasis (elipsinis) laukas? 7.5. Kokiose ribose gali būti slydimas variklio, generatoriaus, stabdžio režimuose? 7.6. Parašykite slydimo išraišką. 7.7. Nuo ko priklauso variklio išvystomas momentas? 7.8. Asinchroninio narvelinio variklio statoriaus laukas turi 4 polius. Kiek polių turi rotoriaus
magnetinis laukas? 7.9. Nuo ko priklauso rotoriuje indukuojamos elektrovaros ir pratekančios srovės dažnis? 7.10. Statoriaus magnetinis laukas sukasi 3000 aps/min greičiu. Kokiu greičiu sukasi rotoriaus laukas? 7.11. Kas daroma, kad elektrovaros pagrindinės harmonikos kreivės forma būtų artimesnė minusinei? 7.12. Nubraižykite besisukančios asinchroninės mašinos atstojamąją schemą ir paaiškinkite, nuo kurio
elemento priklauso mašinos mechaninė galia. 7.13. Nubraižykite besisukančios asinchroninės mašinos atstojamąją schemą ir paaiškinkite, nuo kurio
elemento priklauso mašinos elektromagnetinė galia.

77.14. Parašykite asinchroninio variklio mechaninio sukimo momento formulę. 7.15. Nubraižykite mechaninę charakteristiką ir pakomentuokite būdingiausius taškus. Pratęskite į kitus
mašinos režimus. Kokie jie? 7.16. Kam proporcingas asinchroninio variklio paleidimo momentas? 7.17. Kada paleidimo momentas maksimalus? 7.18. Kam proporcingas asinchroninio variklio maksimalus sukimo momentas Mmax? 7.19. Nuo ko priklauso varžos ( 1
2−ss R ' )dydis?
7.20. Nubraižykite asinchroninės mašinos apskritiminę diagramą. 7.21. Asinchroninio variklio paleidimas. Paremkite charakteristikomis. 7.22. Asinchroninio variklio greičio reguliavimas. Paremkite charakteristikomis. 7.23. Asinchroninio variklio stabdymas. Paremkite charakteristikomis. 7.24. Koks laukas susidaro vienfaziame (dvifaziame) variklyje? 7.25. Kaip paleisti vienfazį variklį? 7.26. Kas vyksta mašinoje, tekant realiai tuščiosios veikos srovei? 7.27. Kam lygus slydimas s paleidimo metu (trumpojo jungimo režime, idealioje tuščiojoje veikoje) ir
kaip pasiekiama ideali tuščioji veika? 7.28. Asinchroninio variklio rotorius sukasi 990 aps/min greičiu. Koks variklio polių porų skaičius p,
slydimas s, bei sinchroninis greitis n0? 7.29. Kokių rūšių magnetinius laukus žinote ir kokios kiekvieno jų susidarymo sąlygos? 7.30. Kelių fazių sistemos gali sukurti apskritiminį lauką? 7.31. Kaip skirstomi asinchroniniai varikliai pagal rotoriaus konstrukciją? 7.32. Kaip galima valdyti valdomo variklio sukimosi greitį? Paremkite M(n) charakteristikų šeima. Kur
koks laukas vyrauja? 8. Sinchroninės mašinos
8.1. Kaip skirstomos sinchroninės mašinos pagal rotoriaus konstrukciją? 8.2. Parašykite sinchroninės mašinos rotoriaus apsisukimų greičio formulę. 8.3. Kokiais režimais gali dirbti sinchroninės mašinos? 8.4. Kas tai yra sinchroninis kompensatorius? 8.5. Kuo skiriasi turbogeneratorius nuo hidrogeneratoriaus? 8.6. Sinchroninio variklio ir generatoriaus veikimo principas. 8.7. Kas sukuria sinchroninio variklio sukimo momentą, atsveriantį apkrovos momentą, M=Ms ?
Parašykite formulę. 8.8. Ar sinchroninis variklis turi paleidimo momentą? 8.9. Kaip paleidžiamas sinchroninis variklis? 8.10. Nuo ko priklauso sinchroninės mašinos cos φ? 8.11. Parašykite sinchroninės mašinos žadinimo apvijos (rotoriaus) magnetovaros formulę. 8.12. Kas kuria visos sinchroninės mašinos magnetovarą? 8.13. Nubraižykite sinchroninio neryškiapolio generatoriaus inkaro apvijos vienos fazės atstojamąją
schemą, įtampų pusiausvyros lygtį, vektorinę diagramą. 8.14. Nuo ko priklauso sinchroninio generatoriaus įtampos dydis ir fazė? 8.15. Kodėl ryškiapolėje mašinoje srovė išskiriama į dedamąsias, o neryškiapolėje ne? 8.16. Nubraižykite pavienio sinchroninio generatoriaus pagrindines charakteristikas. 8.17. Apibūdinkite sinchroninio generatoriaus sinchronizavimo sąlygas. 8.18. Kaip reguliuojama sinchroninio generatoriaus, dirbančio galingam tinklui, reaktyvioji galia? 8.19. Kaip reguliuojama sinchroninio generatoriaus, dirbančio galingam tinklui, aktyvioji galia, norint,
kad jis tiektų į tinklą aktyviąją galią? Nupieškite vektorinę diagramą. 8.20. Kas tai yra kampas Θ? 8.21. Kas tai yra sinchroninio generatoriaus, dirbančio galingam tinklui, kampinė ch-ka, kokiomis
sąlygomis ji sudaroma? 8.22. Nubraižykite sinchroninio generatoriaus (variklio) „V“ ch-kas. Pakomentuokite. 8.23. Kaip paleidžiamas sinchroninis variklis? 8.24. Nubraižykite sinchroninio variklio mechaninę charakteristiką.

8
MINIMALŪS KLAUSIMAI SAVIKONTROLEI
1. Nuolatinės srovės generatoriai
1.1. Nuolatinės srovės mašinos konstrukcija ir veikimo principas. 1.2. Parašykite induktyviosios elektros mašinos elektrovaros formulę (elektromagnetinės indukcijos
dėsnis) 1.3. Kaip mažinama inkaro reakcijos įtaka komutacijai? 1.4. Parašykite elektrovaros formulę. 1.5. Parašykite nuolatinės srovės generatoriaus įtampų balanso lygtį. 1.6 Kokias eksperimentines charakteristikas reikia turėti, norint sudaryti charakteringąjį trikampį ir ką
jis nusako, kaip jis sudaromas? 1.7. Nubraižykite nuolatinės srovės generatoriaus pagrindines charakteristikas. 1.8. Kokios yra lygiagretaus žadinimo generatoriaus susižadinimo sąlygos?
2. Nuolatinės srovės varikliai 2.1. Veikimo principas. 2.2. Parašykite elektromagnetinės galios formulę. 2.3. Parašykite elektromagnetinio momento formulę. 2.4. Nubraižykite nuolatinės srovės variklio atstojamąją schemą ir parašykite, kam lygi įtampa ant
išorinių variklio gnybtų; 2.5. Parašykite lygiagretaus žadinimo variklio mechaninės charakteristikos analitinę išraišką ir
nubraižykite mechaninę charakteristiką . 2.6. Nubraižykite nuoseklaus žadinimo variklio mechaninę charakteristiką. 2.7. Kokios šių variklių greičio reguliavimo galimybės? 2.8. Kaip elektriškai stabdomi nuolatinės srovės varikliai. 2.9. Kur ir dėl kokių savybių panaudojami nuolatinės srovės varikliai?
3. Nuolatinės srovės elektros mašinų magnetinė grandinė
3.1. Koks magnetinės grandinės skaičiavimo tikslas? 3.2. Kokiu dėsniu vadovaujantis skaičiuojamos magnetinės grandinės? 3.3. Kokie magnetinės grandinės pradiniai parametrai turi būti žinomi ir koks parametras ieškomas? 3.4. Kaip skaičiuojamas magnetinio srauto tankis B, kai žinomas srautas (formulė)? Kokios jų
dimensijos? 3.5. Parašykite magnetinio lauko stiprio H formulę (kaip jis siejasi su magnetinio srauto tankiu B,
kokia jo dimensija)?
4. Srovės komutacija 4.1 Kas tai yra „srovės komutacija“? 4.2 Kokia žinote komutacijos rūšis 4.3 Kaip galima pagerinti komutaciją?
5. Nuolatinės srovės elektros mašinų inkaro apvijos
5.1. Kokias žinote apvijų rūšis? 5.2. Kas nulemia lygiagrečių šakų kiekį? 5.3. Kur turi būti išdėstyti šepečiai? 5.4. Nuo ko priklauso evj kryptis? 5.6. Kada reikės numatyti didelį lygiagrečių šakų skaičių? 5.7. Koks skirtumas tarp paprastosios ir sudėtinės banginių apvijų. ? 5.8. Kaip skirstomas elektros mašinų darbo režimas pagal mašinos temperatūrą? 5.9. Kas nustato izoliacijos temperatūrą?

9
6. Transformatoriai
6. 1. Transformatoriaus veikimo principas 6. 2. Parašykite transformacijos koeficiento visas Jums žinomas išraiškas. 6.3. Parašykite transformatoriaus elektrovaros efektinės vertės išraišką. 6.4. Parašykite redukuotojo transformatoriaus įtampų balanso ir magnetovarų lygtis ir nubraižykite
atstojamąją schemą. 6.5. Nubraižykite redukuoto transformatoriaus vektorinę diagramą, 6.6. Ką sužinome iš transformatoriaus tuščiosios veikos bandymo? 6.7. Ką sužinome iš transformatoriaus trumpojo jungimo bandymo? 6.8. Kaip kinta antrinė įtampa, augant apkrovos srovei, priklausomai nuo apkrovos pobūdžio?
7. Asinchroninės mašinos
7.1. Asinchroninio variklio veikimo principas. 7.2. Kokios būtinos sąlygos sukamajam laukui sukurti? 7.3. Parašykite statoriaus magnetinio lauko sukimosi greičio formulę. 7.4. Parašykite slydimo išraišką. 7.5. Nuo ko priklauso variklio išvystomas momentas? 7.6. Nubraižykite besisukančios asinchroninės mašinos atstojamąją schemą ir paaiškinkite, nuo kurio
elemento priklauso mašinos mechaninė galia. 7.7. Parašykite asinchroninio variklio mechaninio sukimo momento formulę. 7.8. Nubraižykite mechaninę charakteristiką ir pakomentuokite būdingiausius taškus. 7.9. Asinchroninio variklio paleidimas. Paremkite charakteristikomis. 7.10. Asinchroninio variklio greičio reguliavimas. Paremkite charakteristikomis. 7.11. Asinchroninio variklio stabdymas. Paremkite charakteristikomis. 7.12. Koks laukas susidaro vienfaziame (dvifaziame) variklyje? 7.13. Kam lygus slydimas s paleidimo metu, (trumpojo jungimo režime, idealioje tuščiojoje veikoje) ir
kaip pasiekiama ideali tuščioji veika? 7.14. Kaip skirstomi AV pagal rotoriaus konstrukciją?
8. Sinchroninės mašinos
8.1. Kaip skirstomos SM pagal rotoriaus konstrukciją? 8.2. Parašykite SM rotoriaus apsisukimų greičio formulę. 8.3. Kokiais režimais gali dirbti sinchroninės mašinos? 8.4. Sinchroninio variklio ir generatoriaus veikimo principas. 8.5. Kaip paleidžiamas sinchroninis variklis? 8.6. Nuo ko priklauso sinchroninės mašinos cos φ? 8.7. Nubraižykite sinchroninio neryškiapolio generatoriaus inkaro apvijos vienos fazės atstojamąją
schemą, įtampų pusiausvyros lygtį, vektorinę diagramą. 8.8. Nuo ko priklauso sinchroninio generatoriaus įtampos dydis ir fazė? 8.9. Nubraižykite pavienio sinchroninio generatoriaus pagrindines ch-kas. 8.10. Apibūdinkite sinchroninio generatoriaus sinchronizavimo sąlygas. 8.11. Kaip reguliuojama sinchroninio generatoriaus , dirbančio galingam tinklui, reaktyvioji galia? 8.12. Kaip reguliuojama sinchroninio generatoriaus , dirbančio galingam tinklui, aktyvioji galia, norint,
kad sinchroninis generatorius tiektų į tinklą aktyviąją galią? Nupieškite vektorinę diagramą. 8.13. Kas tai yra sinchroninio generatoriaus, dirbančio galingam tinklui, kampinė ch-ka, kokiomis
sąlygomis ji sudaroma? 8.14. Nubraižykite sinchroninio variklio, sinchroninio generatoriaus „V“ ch-kas. Pakomentuokite. 8.15. Nubraižykite sinchroninio variklio mechaninę charakteristiką.

10
PRIEŠISTORĖ
Įprasta manyti, kad elektros mašinų istorija prasidėjo 1821 m., kai Maiklas Faradėjus išrado elektros variklį. 1-nuolatinis magnetas, apie kurį sukosi laidas su srove 2 (prijungtas prie cheminių elementų baterijos E). Šiame variklyje energijos keitimas vyko, nuolatinio magnetinio lauko ir ir nuolatinės srovės, tekančios laidininke, sąveika.
Būtina variklio darbo sąlyga – slystančio kontakto (tarp nejudančiosios ir judančiosios elektrinės grandinės dalių) buvimas.
Faradėjaus variklyje kontaktavo gyvsidabris, pripiltas į indą 4 ir viršutinė atrama 3.
Tuometinės fizikos išsivystymas buvo paruošęs dirvą Faradėjo atradimui.
Nežiūrint į modelio paprastumą, M. Faradėjo variklis iki šiol neturi griežto matematinio modelio, o unipoliarinės mašinos netapo elektromechanikos pagrindine kryptimi.
Elektrinės mašinos egzistavo ir iki 1821m. 17 a viduryje O. Gerikė aprašė pirmąją elektros mašiną
– besisukantį kamuolį iš sieros, trinamą rakų delnais. Tai buvo talpinė trinties mašina su darbo elektriniu lauku.
18 a pradžioje F. Gauksbi kamuolį iš sieros pakeitė pilnaviduriu stikliniu, įtvirtintu ant ašies. 18 a
gale trinties mašinų rotorių pradėta gaminti iš iki 2 m skersmens stiklinių diskų. Šių mašinų kibirkščių ilgis viršijo 1m.
Didelį indėlį elektrotechnikos išsivystymui įnešė Luidžis Galvanis (1737-1798). Jis vadovavo
Bolonijos universiteto praktinės anatomijos katedrai ir tyrinėjo raumenų ir nervų fiziologiją. 1786 m. jis pastebėjo varlės kojelės raumens susitraukimą , užtrumpinus kontūrą “geležis-varis-varlės kojelė”. Galvani tvirtino, kad jis išrado “gyvūninę elektrą”. 1791m. jis rašė, kad elektriniai reiškiniai būdingi visiems gyvūnams, taigi, ir žmogui.
1729 m. anglas S. Grėjus pasiūlė medžiagas skirstyti į laidininkus ir izoliatorius. 1733 m. prancūzas Š. Diufe atrado dviejų tipų krūvių egzistavimą, o B. Franklinas įvedė terminus
“teigiamo ir neigiamo” krūvių. 1745m. sukurtas kondensatorius. 1752m. B.Franklinas atrado “atmosferos elektrą” (nors žaibai trankėsi Žemėje visada) o 1753m.
Peterburge, tiriant žaibą, žuvo G. Richmanas, dirbęs kartu su M. Lomonosovu. Didis italų mokslininkas A. Volta (1745-1827) 1792m. paneigė L. Galvani tvirtinimus apie
gyvūninę elektrą, manydamas, kad varlės kojelės raumens susitraukimo priežastimi (ir elektros priežastimi) yra dviejų skirtingų metalų kontaktas. Vėlesnis mokslo vystymasis patvirtino, kad abu mokslininkai buvo teisūs.
18a. elektros mašinos buvo taikomos įvairiuose fiziologiniuose ir psichologiniuose bandymuose. Supratimas apie elektrą buvo siejamas su gyvais organizmais ir dieviškomis galiomis.
1800m. A. Volta sukuria elektrocheminį generatorių, susidedantį iš cinko ir vario diskų, atskirtų
rūgštimi. 1802 m. rusas V. Petrovas padarė bateriją iš 4200 varinių ir cinko diskų ir gavo elektrovarą

11(E), lygią 1700 V, o galia siekė 85 W. Dar jis atrado elektros lanko reiškinį ir stebėjo magnetinį ir šiluminį elektros srovės veikimą.
1820 m. Ž.Bio ir F. Savarr’as suformulavo srovės ir magneto tarpusavio poveikio dėsnį. Tais pačiais
metais G. Erstedas paskelbė darbą apie magnetinės rodyklės ir laido su srove tarpusavio poveikį, o F. Arago pasiūlė solenoidą. Po M. Faradėjaus induktyviosios elektros mašinos su magnetiniu lauku, kuriame vyksta elektromechaninis energijos keitimas, atradimo, pagrindinė sėkmės elektromechanikos srityje iki šiol yra susiję būtent su šia energijos keitimo rūšimi.
1826 m. G. Ohm’as (Omas) atrado jo vardu pavadintą dėsnį. 1831m. M. Faradėjus atrado
elektromagnetinės indukcijos dėsnį. Jis sakė, kad jam pavyko paversti magnetizmą į elektrą. Jo mąstymas apie magnetinį lauką kaip apie įpatingą materijos būseną pasirodė labai įžvalgūs ir turėjo didelę reikšmę elektros mašinų teorijai ir konstravimui.
1832m. E. Lencas suformulavo elektros mašinų apgręžiamumo principą, o po metų tai
pademonstravo praktiškai. 1834m. B. Jakobi sukonstravo variklį, kuris dirbo elektromagnetų pritraukomo ir atstūmimo
sąskaita. 1838m. jis valtyje (bote)įrengė 40 elektros variklių, dirbančių 2 velenams ir galvaninę bateriją iš 320 elementų. Botas plaukiojo Nevos upe keletą valandų. Tai buvo pirmas praktinis elektros mašinų pritaikymas.
1889m. M. Dolivo-Dobrovolskis sukuria trifazę kintamosios srovės sistemą ir sukonstruoja trifazį
narvelinį elektros variklį bei trifazį transformatorių. 1891m. pastatyta pirmoji trifazė elektrinė Laufene, kuri tiekė energiją tarptautinei parodai Frankfurte–prie-Maino (Vok.) tarptautiniam elektrotechnikų suvažiavimui. Elektros perdavimo linijos ilgis buvo 170 km., 300 arklio jėgų galios. Parodoje pirmą kartą įsižiebė 1000 kaitrinių lempučių, o 100 arklio jėgų AV demonstravo gražų dirbtinį krioklį
Teorinio kurso įžanga
Elektros mašina – elektromechaninis energijos keitimo įrenginys. Tai maždaug 140 metų senumo įrenginiai. Elektros mašinos (EM) yra pagrindinis energetinis įrenginys, naudojamas šiuolaikinėje elektrotechnikoje, kurių kol kas nėra kuo pakeisti, nežiūrint į kitų – elektronikos sričių išsivystymą. Elektros mašinų vystymosi šuolių sunku numatyti ateičiai. Panaudojus superlaidumo efektą, elektros mašinos konstrukcija keičiasi.
Elektrotechnika, kaip mokslas, pradėjo vystytis 19 šimtmečio pradžioje, palyginti su mechanika, yra jaunas mokslas.
Elektros mašina yra energetinis įrenginys, skirtas elektros energijos ir mechaninės energijos
formoms tarpusavyje keisti. Visos mašinos – apgręžiamos. Elektromechaninis energijos keitimas vyksta laukais, nejudančiais
vienas kito atžvilgiu, o rezultuojantį lauką mašinoje kuria statoriaus ir rotoriaus laukai. Rotorius gali suktis lauko greičiu arba kitokiu greičiu, tačiau rotoriaus ir statoriaus laukai nusistovėjusiame režime vienas kito atžvilgiu nejuda.
Svarbu yra racionalus energijos keitimas su kuo mažesniais nuostoliais. Elektros mašinos darbo procese figūruoja mechaninio judesio energija ir privalo būti bent du kūnai,
kurie juda vienas kito atžvilgiu ir tarp kurių veikia mechaninės jėgos. Dažniausiai yra naudojamas mechaninis judesys. Taigi, daugumoje yra sukamojo judesio mašinos. Tačiau yra linijiniai varikliai, skirti grynai transportui.
Daugumoje atvejų sukasi vienas kūnas kito atžvilgiu ir todėl skiriame statorių ir rotorių. Kai mašinų sukimosi kryptis yra pastovi, turime nuolatinio judesio elektros mašinos.
12Kai keičiasi judesio kryptis, vadinamos švytuojamosiomis mašinomis. Elektros mašinos gali būti skirstomos pagal įvairius požymius:
• Pagal laikines judesio savybes: 1. nuolatinis , o judesys gali būti bet koks:
a) sukamasis judesys, tai įprastinės mašinos – nuolatinio sukimosi; b) tiesinis judesys – tai tiesiaeigės nuolatinio judesio mašinos; c) sudėtingo judesio – pvz., riedančio rotoriaus mašinos;
2. periodinis (švytuojamasis): a) sukamasis judesys, tai švytuojamojo sukamojo judesio EM; b) tiesinis judesys – tai švytuojamojo tiesinio judesio; c) sudėtingo judesio – tai švytuojamosios sudėtingos trajektorijos
mašinos. 3. impulsinis : a) sukamasis judesys - tai diskrečiųjų impulsų (vienintelio impulso - sūkio impulso ar
impulsų serijos – žingsniniai sukieji varikliai) ir neapibrėžtų impulsų, pvz., kampinis pozicionavimas; b) tiesinis judesys – tai diskrečiųjų impulsų (tiesiaeigio impulso ar žingsniniai tiesinio judesio ir neapibrėžtų impulsų pvz., tiesinio pozicionavimo; c) sudėtingo judesio ..(galėtų būti)
• Pagal erdvines judesio savybes: sukamasis, tiesinis, sudėtingas judesys. • Pagal energijos keitimo kryptį: a) generatoriai, kuriuose mechaninė energija verčiama į elektros; b)
varikliai, kuriuose elektros energija verčiama į mechaninę; c) keitikliai, kuriuose naudojamas kombinuotas atvejis: vienų parametrų elektros energija keičiama į mechaninę, o vėliau į kitų parametrų energiją.
• Pagal srovę: nuolatinės ir kintamosios srovės
• Pagal galią: mažos, vidutinės, didelės galios elektros mašinos. Bet toks skirstymas yra reliatyvus. Pvz., nuolatinės srovės mašina 0,5 kW – mažos galios; 100 kW – vidutinės, iki 10 MW –didelės galios. O kintamosios srovės mašina 0,5 kW – mažos galios , bet didžiausia galia 1.000.000 kW , todėl kintamosios srovės mašinoms 10.000 kW galia gali būti tik vidutinė.
Keitimo tikslai įvairūs. Iš esmės, keitiklių funkcijas atlieka transformatorius, tik jo nelaikome elektros mašina. Galima gauti ir mechaninės energijos keitiklį. Betarpiškai keisti mechaninę energiją į elektros energiją negalima. Tikrumoje mechaninė energija → magnetinio lauko energija → elektros energija.
Tokios mašinos, dirbančios tarpininkaujant magnetinio lauko energijai, vadinamos induktyvinėmis mašinomis. Toks tarpininkavimas nepageidaujamas, nes įvedami papildomi nuostoliai. Visoms elektros mašinoms būdingas apgręžiamumo principas: kiekviena mašina gali dirbti tiek generatoriumi, tiek varikliu. Tačiau praktikoje kiekviena mašina turi apibrėžtą paskirtį, kad kiekviena mašina atitiktų nominalius darbo parametrus.
Pvz., variklio UN = 220 V, o generatorius dirbdamas turi duoti UN = 230 V įtampą, todėl mašinos
skirstomos į generatorius ir variklius.
13NUOLATINĖS SROVĖS MAŠINOS
Nuolatinės srovės mašinos naudojamos labai plačiai: nuolatinės srovės generatoriai – elektriniam suvirinimui, elektrolizei, magnetų žadinimo apvijai maitinti ir kt.; nuolatinės srovės varikliai – elektros traukai (transporte, liftuose, ekskavatoriuose).
Nuolatinės srovės mašinų veikimo principas Norint gauti nuolatinės elektrovaros šaltinį, turime turėti grandinę, kurioje indukuotume
nuolatinę elektrovarą (EV). 1Jeigu kalbama apie induktyviąsias elektros mašinas, veikiančias elektromagnetinės indukcijos
dėsniu, tai galima užrašyti: e w ddt
L didt
ddt
= − = − = −Φ Ψ Čia minusas – ženklų
sistemos susitarimo reikalas. Viską nulemia energijos tvarumo dėsnis. Jei laikysime energiją teikiamą objektui teigiama, tai išeinanti bus neigiama.
Čia ψ – surištasis magnetinis srautas; Φ- magnetinis srautas. w- vijų skaičius (šiuo atveju =1) Tačiau, jeigu norime gauti nuolatinę EV: e = const = E , reiktų keisti (visą laiką didinti) magnetinį srautą
dt-w= ΦdE ;
Turime pirmos eilės tiesinę dif. lygtį.: Išvada: Srautas privalo nuolat
Ct +ΦwE-=
wE-=
dtΦd kisti (didėti ar mažėti)
; Integruojame, sprendžiame. iš čia . proporcingai laikui
Taigi, jeigu norime neribotai ilgą laiką indukuoti EV, tai privalome keisti srautą. Bet jį keisti visą laiką neįmanoma, be to, feromagnetinės medžiagos turi ir prisotinimo efektą. Bet teoriškai galime didinti srautą nors ir iki begalybės, nors tai nerealu, prieštarauja praktikai.
Srauto analogu energetiniu požiūriu yra elektros krūvis ( o ne srovės analogas): Φ → Q.
Krūviu užkraudami kondensatorių, sutalpiname tam tikrą energijos kiekį, bet ne be galo didelį, nes per didelio energijos kiekio materija negali išlaikyti.
Todėl ir srautą galima didinti tik iki tam tikrų ribų. Praktiškai be galo didinti srauto neįmanoma. Atrodytų, kad negalima sukurti elektrinių mašinų, kurios dirbtų ilgą laiką.
Esmė tame, kad, naudojant nekintamus elektrinius kontūrus, tokių mašinų nesukurtume. Todėl tam tikslui naudojamos kontaktinės elektros mašinos, kuriose kontūrai yra
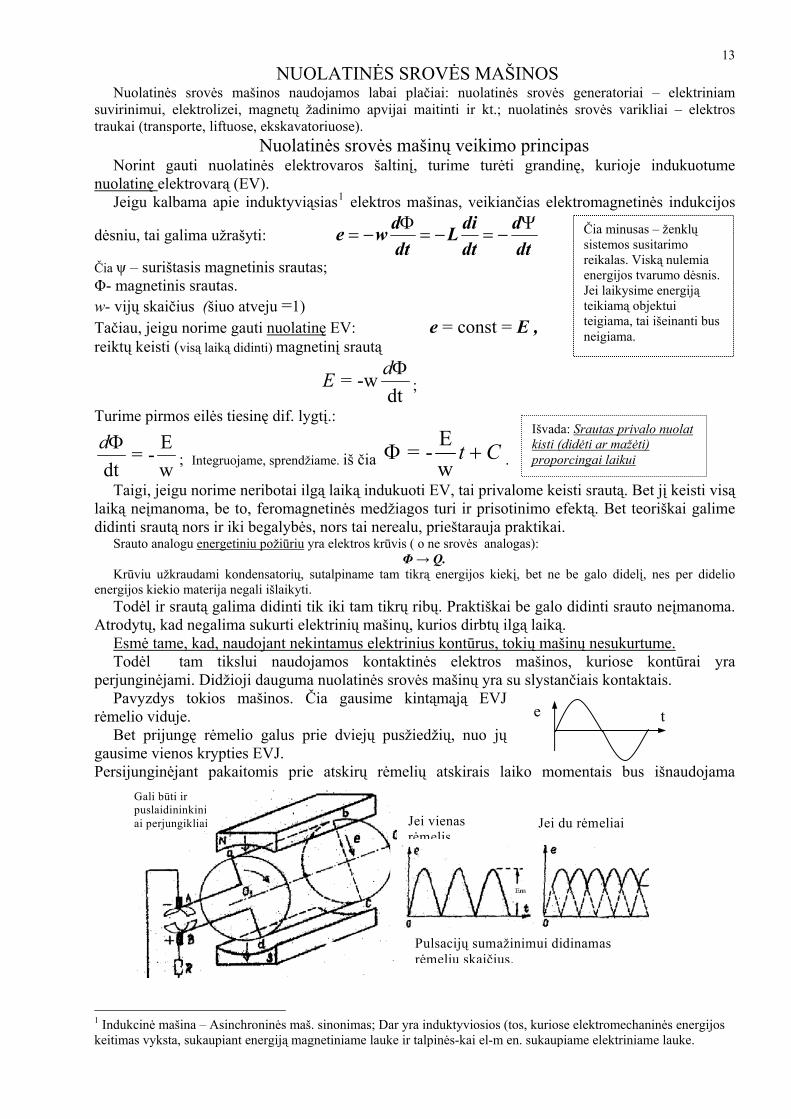
perjunginėjami. Didžioji dauguma nuolatinės srovės mašinų yra su slystančiais kontaktais. Pavyzdys tokios mašinos. Čia gausime kintąmąją EVJ
rėmelio viduje. t e Bet prijungę rėmelio galus prie dviejų pusžiedžių, nuo jų
gausime vienos krypties EVJ. Persijunginėjant pakaitomis prie atskirų rėmelių atskirais laiko momentais bus išnaudojama
Jei vienas rėmelis
Jei du rėmeliai
Pulsacijų sumažinimui didinamas rėmelių skaičius.
Gali būti ir puslaidininkiniai perjungikliai
1 Indukcinė mašina – Asinchroninės maš. sinonimas; Dar yra induktyviosios (tos, kuriose elektromechaninės energijos keitimas vyksta, sukaupiant energiją magnetiniame lauke ir talpinės-kai el-m en. sukaupiame elektriniame lauke.
14nedidelė apvijos dalis. Tikslinga, kad kiekvienu metu dalyvautų visos apvijos. Skirtingo dydžio elektrovaras turinčias apvijas galima jungti nuosekliai. Tie rėmeliai turėtų būti sujungiami į vieną uždarą kontūrą.
Pagal tokį principinį modelį komponuojama visos mašinos konstrukcija. Nuolatinės srovės mašinų konstrukcija
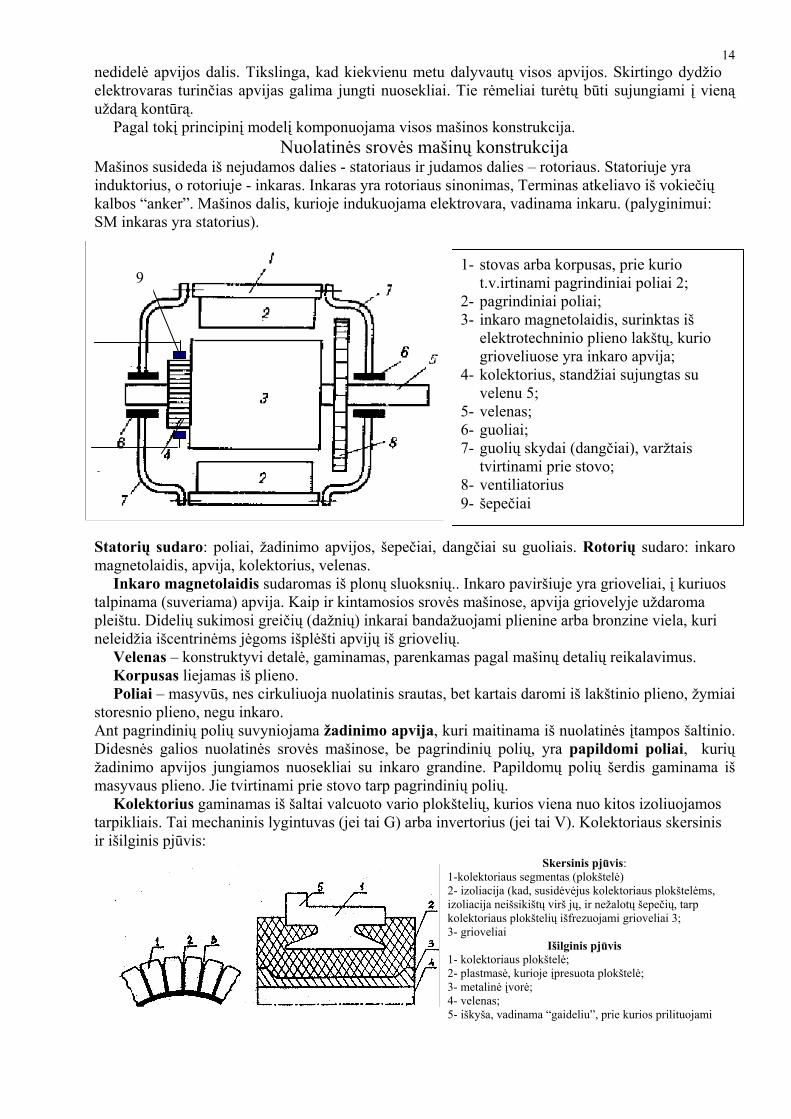
Mašinos susideda iš nejudamos dalies - statoriaus ir judamos dalies – rotoriaus. Statoriuje yra induktorius, o rotoriuje - inkaras. Inkaras yra rotoriaus sinonimas, Terminas atkeliavo iš vokiečių kalbos “anker”. Mašinos dalis, kurioje indukuojama elektrovara, vadinama inkaru. (palyginimui: SM inkaras yra statorius).
1- stovas arba korpusas, prie kurio t.v.irtinami pagrindiniai poliai 2;
2- pagrindiniai poliai; 3- inkaro magnetolaidis, surinktas iš
elektrotechninio plieno lakštų, kurio grioveliuose yra inkaro apvija;
4- kolektorius, standžiai sujungtas su velenu 5;
5- velenas; 6- guoliai; 7- guolių skydai (dangčiai), varžtais
tvirtinami prie stovo; 8- ventiliatorius 9- šepečiai
9
Statorių sudaro: poliai, žadinimo apvijos, šepečiai, dangčiai su guoliais. Rotorių sudaro: inkaro magnetolaidis, apvija, kolektorius, velenas.
Inkaro magnetolaidis sudaromas iš plonų sluoksnių.. Inkaro paviršiuje yra grioveliai, į kuriuos talpinama (suveriama) apvija. Kaip ir kintamosios srovės mašinose, apvija griovelyje uždaroma pleištu. Didelių sukimosi greičių (dažnių) inkarai bandažuojami plienine arba bronzine viela, kuri neleidžia išcentrinėms jėgoms išplėšti apvijų iš griovelių.
Velenas – konstruktyvi detalė, gaminamas, parenkamas pagal mašinų detalių reikalavimus. Korpusas liejamas iš plieno. Poliai – masyvūs, nes cirkuliuoja nuolatinis srautas, bet kartais daromi iš lakštinio plieno, žymiai
storesnio plieno, negu inkaro. Ant pagrindinių polių suvyniojama žadinimo apvija, kuri maitinama iš nuolatinės įtampos šaltinio. Didesnės galios nuolatinės srovės mašinose, be pagrindinių polių, yra papildomi poliai, kurių žadinimo apvijos jungiamos nuosekliai su inkaro grandine. Papildomų polių šerdis gaminama iš masyvaus plieno. Jie tvirtinami prie stovo tarp pagrindinių polių.
Kolektorius gaminamas iš šaltai valcuoto vario plokštelių, kurios viena nuo kitos izoliuojamos tarpikliais. Tai mechaninis lygintuvas (jei tai G) arba invertorius (jei tai V). Kolektoriaus skersinis ir išilginis pjūvis:
Skersinis pjūvis: 1-kolektoriaus segmentas (plokštelė) 2- izoliacija (kad, susidėvėjus kolektoriaus plokštelėms, izoliacija neišsikištų virš jų, ir nežalotų šepečių, tarp kolektoriaus plokštelių išfrezuojami grioveliai 3; 3- grioveliai
Išilginis pjūvis 1- kolektoriaus plokštelė; 2- plastmasė, kurioje įpresuota plokštelė; 3- metalinė įvorė; 4- velenas; 5- iškyša, vadinama “gaideliu”, prie kurios prilituojami

15Kolektorių plokštelės dažniau tvirtinamos ne plastmasėje, bet prispaudžiamaisiais metaliniais žiedais. Elektrinis kontaktas su kolektoriaus paviršiumi sudaromas šepečiais. (Tai istorinis pavadinimas.)Tai grafito arba metalo (anglies) grafito detalės, įrengtos ant sukiojamos konstrukcijos, kad galima būtų parinkti optimalią padėtį. Taigi, šepečių įtaisas susideda iš šepečių reketo, jo pirštų ir šepečių laikiklių.
Šepečių reketas (jis įgalina keisti šepečių padėtį statoriaus atžvilgiu) tvirtinamas prie guolių skydo ir tik didelės galios mašinose jis t.v.irtinamas prie stovo. Tarp šepečių reketo ir pirštų yra izoliacija. Ant kiekvieno piršto užmaunami šepečių laikikliai. Pirštų yra tiek, kiek ir mašinos pagrindinių polių. Šepečių laikiklis susideda iš apkabos 4, į kurią įdedamas šepetys 3, gaiduko 1, kurį galima atlenkti ir kuris perduoda spyruoklės 2 spaudimą šepečiui. Prie šepečio laikiklis tvirtinamas prie reketo
apkaba
šepetys
gaidukas
spyruoklė
Piršto apkaba Lankstus lynas pirštas
izoliacija
Šepečių laikiklis
4
3
5 6
piršto apkaba 5. Prie šepečio t.v.irtinamas lankstus laidininkas 6, jungiąs šepetį (kolektoriaus plokšteles) su išorine grandine. Viena iš gero mašinos darbo sąlygų yra tvirtas ir patikimas kontaktas tarp šepečio ir kolektoriaus. Spaudimas šepečio į kolektorių turi būti sureguliuotas, nes, esant per dideliam spaudimui, gali pirma laiko susidėvėti šepečiai ir perkaisti kolektorius, o esant nepakankamam spaudimui, gali kolektorius kibirkščiuoti.
Be to, mašinoje yra du guolių skydai. Mašinos apvijoms prijungti prie elektros tinklo, joje yra išvadų dėžutė.
Inkaro apvijų sudarymo principas
Inkaro apvija sudaryta iš daugybės elementarių vijų (rėmelių).Tos vijos jungiamos nuosekliai, kad sudarytų uždarą grandinę. Kiekvienos iš tų vijų galai jungiami prie kolektoriaus plokštelių.
Sekcija – inkaro apvijos dalis, kurios galai prijungti prie skirtingo poliarumo kolektoriaus plokštelių ( skirtingų polių). Žymėsime S.
S
S
K
ee
y1 S N
τ Kai kelios sekcijos, vienos pabaiga jungiama su kitos pradžia.

16Paprastojoje kilpinėje apvijoje kiekviena sekcija prijungiama prie dviejų greta esančių
kolektoriaus plokštelių. Klojant sekcijas ant inkaro šerdies, kiekvienos sekančios sekcijos pradžia jungiama su pirmesnės sekcijos galu.
I I
Jei kontūras uždaras, srovė išsišakoja tik į lyginį skaičių lygiagrečių šakų
+E
-E Kiekvienos sekcijos puslankis
Ilg
Ilg Šepečiai prijungiami ten, kur keičiasi srovės kryptis
Iš tiesų čia deda šepečius
Šepečių sąlyginis vaizdavimas
Geometrinė neutralė
Taip einama inkaro (ir kolektoriaus ) paviršiumi, ir vienu apėjimu sudedamos visos sekcijos, kol
paskutinės sekcijos galas sujungiamas su pirmosios pradžia, t.y. apvija uždaroma. Gauname, kad prie kiekvienos kolektoriaus plokštelės yra prijungti du sekcijų galai. Jei kolektoriaus plokšteles pažymėsime K, tai visuomet
S = K Sekcijos sujungiamos taip,kad sudarytų uždarą grandinę. Srovė I išsišakoja į dvi (šiuo atveju) dalis.
lygiagrečių šakų kiekįTą ,( į kurias srovė išsišakoja inkaro apvijoje) žymėsime 2a. (Pagal analogiją :polių skaičius – 2p, p – polių porų skaičius). a – lygiagrečių šakų porų skaičius. Sekcijos plotis (atstumas nuo vieno sekcijos šono iki kito) y1 turi būti toks, kad EVJ susidarančiose sekcijose visą laiką sumuotųsi, kad sekcijų šonai gulėtų ties skirtingais poliais. Matematiškai y1 ≈ τ.
τ - poliaus žingsnis, atstumas tarp gretimų polių ašių. Pasiaiškinsime plačiau. Kad būtų paprasčiau, tarkime, kad mašinos inkaro laidininkai išdėstyti inkaro paviršiuje. Tiesė,
einanti per inkaro centrą ir sudaranti su polių magnetine ašimi π /2 kampą, vadinama mašinos geometrine neutrale. Tai linija, kurios taškuose srautas lygus nuliui ir keičia kryptį.Tarkime, kad ant geometrinės neutralės sudėti šepečiai. Sukantis inkarui pagal laikrodžio rodyklę, visuose laidininkuose virš geometrinės neutralės, bus indukuojama EVJ nukreipta “nuo mūsų”, o laidininkuose, esančiuose žemiau geometrinės neutralės, -“į mus”. Tarp šepečių A ir B gaunama EVJ Ea lygi visų ričių elektrovarų geometrinei sumai. Geometrinė neutralė ir šepečiai dalija inkaro apviją į dvi lygiagrečias šakas. Jeigu vienos šakos srovė ilg, tai išorinės grandinės srovė Ia = 2 ilg,
Bendruoju atveju, kai polių porų skaičius p≥1, lygiagrečių šakų skaičius gali būti lygus 2a. .
Nuolatinės srovės mašinų inkaro reakcija
Mašinai dirbant tuščiosios veikos režimu, inkaro apvija srovė praktiškai neteka. Mašinos magnetinėje grandinėje veikia tik viena žadinimo apvijos magnetovara (MV). Magnetinis srautas, kurį sukuria žadinimo apvijos srovė, vadinamas pagrindiniu. Jis yra simetriškas polių ašies atžvilgiu, o magnetinio srauto tankio pasiskirstymas oro tarpe yra kreivė, artima trapecijai. (žr. 1 pav.). Tačiau mašinos darbo metu teka srovė ir inkaro apvijos laiduose, ir ši srovė taip pat yra magnetovaros šaltinis. Ši magnetovara pakeičia magnetinio lauko vaizdą. Tarkime, kad žadinimo magnetovara = 0 ir mašinoje veikia tik inkaro MV. Tada magnetinis laukas, sukurtas šios MV bus

17toks: (2 pav.). Matome, kad inkaro apvijos MV nukreipta šepečių linijos kryptimi (šiuo atveju geometrinės neutralės kryptimi). Pastebėtina, kas nors inkaras ir sukasi, bet inkaro apvijos MV kryptis erdvėje nesikeičia, nes priklauso tik nuo šepečių padėties. Didžiausia inkaro apvijos MV vertė yra ties šepečių linija, o ties polių ašimi ji = 0, tačiau inkaro srauto B tarp polių sumažėja (nes magnetinis laidis tarp poliais mažas; (padidėja magnetinė varža Rm inkaro srautui tarp polių). Inkaro apvijos MV dydis priklauso nuo poliaus žingsniui tenkančių inkaro apvijos laidininkų skaičiaus ir jais tekančios srovės stiprio-ampervijų)
Taigi, apkrautoje mašinoje veikia dvi MV: žadinimo ir inkaro. Inkaro apvijos magnetovaros įtaka mašinos magnetinio lauko pasiskirstymui vadinama
inkaro reakcija. Inkaro reakcija iškraipo pagrindinį magnetinį lauką, padarydama jį asimetrišką mašinos polių ašies atžvilgiu.

18 3 pav. matome generatoriaus režimu dirbančios mašinos atstojamojo lauko linijų pasiskirstymą,
inkarui sukantis pagal laikrodžio rodyklę. Lygiai taip pat linijos pasiskirsto ir variklyje, bet kai inkaras sukasi prieš rodyklę.
Jeigu tarsime, kad mašinos magnetinė sistema neprisotinta, tuomet inkaro reakcija
atstojamąjį magnetinį srautą tik iškraipys, nepakeisdama jo dydžio. Poliaus kraštas ir po juo esantys inkaro šerdies dantys papildomai įsimagnetina (kur inkaro MV kryptis sutampa su pagrindinių polių MV kryptimi); kitas poliaus kraštas ir dantys, kur inkaro MV nukreipta prieš pagrindinių polių MV, išsimagnetina. Atstojamasis magnetinis srautas tartum pasisuka tam tikru kampu pagrindinių polių ašies atžvilgiu. Fizinė neutralė nukrypsta nuo geometrinės kampu α. Kuo labiau mašina apkrauta, tuo labiau iškrypsta atstojamasis laukas, taigi, tuo didesnis fizinės neutralės pasisukimo kampas. Mašinai dirbant generatoriaus režimu, fizinė neutralė pakrypsta inkaro sukimosi kryptimi, o dirbant variklio režimu – priešingai. Tai blogina šepečių kontakto darbo sąlygas, kolektorius kibirkščiuoja.
Jei mašina prisotinta, magnetinio srauto tankis B sumažėja užbrūkšniuotu dydžiu 1 (3 pav.), tuo pačiu sumažėja atstojamojo srauto dydis: inkaro reakcija išmagnetina mašiną. Pablogėja mašinos darbinės savybės; generatoriuose sumažėja elektrovara; varikliuose – sukimo momentas.
Apibendrinimas: Kai šepečiai yra geometrinėje neutralėje, tai inkaro reakcijos srautas yra skersinis. Mašinos darbo metu veikia dvi magnetovaros ir mašinos magnetinis srautas pasikeičia.
Jeigu magnetinė grandinė pasižymėtų tiesinėmis savybėmis, tai galėtume sutapdinti srautus, taikyti superpozicijos principą. Bet netiesinei grandinei tas principas parodys netikslų vaizdą. Veikiant inkaro reakcijai, magnetinis laukas išsikreipia, oro tarpe po poliais pasidaro asimetrinis. Fizinė neutralė fn nesutampa su geometrine neutrale.
Inkaro reakcijai būdingi bruožai: a) Srautas asimetriškas polių ašies atžvilgiu; b) Fizinė neutralė nesutampa su geometrine neutrale; c) Vieno poliaus suminis srautas sumažėja. Inkaro reakcija sumažina poliaus srautą, nes prisisotina atskiros magnetinės grandinės dalys. Šis
reiškinys, deja, yra neišvengiamas.
Fizinės neutralės pasisukimas nepageidautinas, jeigu šepečius paliekame geometrinėje neutralėje, todėl Išilginė
reakcija šepečius stengiamasi
statyti fizinėje neutralėje, ten, kur labai mažai indukuojama E (arba kur ji =0), t.y. ten, kur yra mažiausia inkaro reakcijos EV.
Neutralės pasisukimas iššaukia šepečių kibirkščiavimą. Jeigu
suksime šepečius, tai fizinė neutralė suksis. Bet šepečių pasukimu galima pavyti neutralės sukimąsi ir reikalui esant, pralenkti.
Jeigu pasuksime šepečius ir jie užims maksimalų nuotolį nuo
geometrinės neutralės (900), sukimo momentas būtų lygus 0.
Čia turėsime išilginę inkaro reakciją (išmagnetinančią pagrindinių polių srautą.). Pasukę į priešingą pusę, gautume išilginę įmagnetinančią inkaro reakciją. (Tai kodėl taip
nesukama, ar tai būtų naudinga?) Ne, nes komutacijos požiūriu netinka toks pasukimas (dėl kibirkščiavimo)
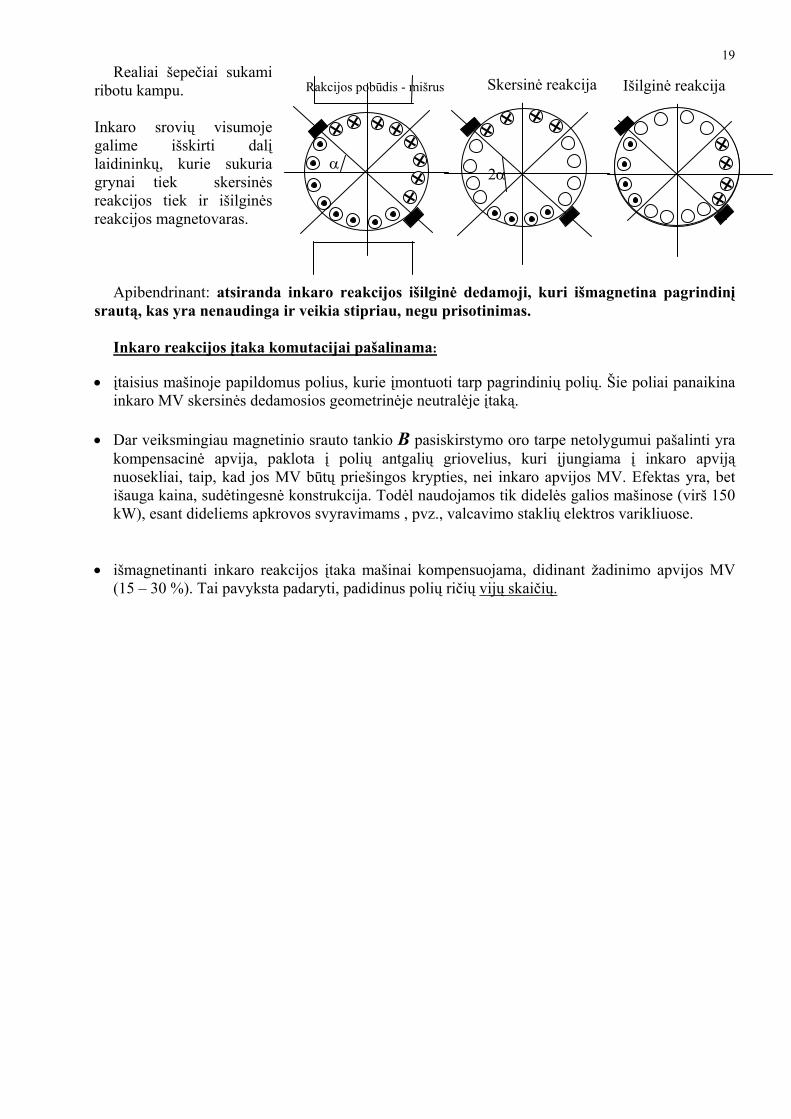
19Realiai šepečiai sukami
ribotu kampu.
Inkaro srovių visumoje galime išskirti dalį laidininkų, kurie sukuria grynai tiek skersinės reakcijos tiek ir išilginės reakcijos magnetovaras.
α 2α
Skersinė reakcija Išilginė reakcija Rakcijos pobūdis - mišrus
Apibendrinant: atsiranda inkaro reakcijos išilginė dedamoji, kuri išmagnetina pagrindinį srautą, kas yra nenaudinga ir veikia stipriau, negu prisotinimas.
Inkaro reakcijos įtaka komutacijai pašalinama:
• įtaisius mašinoje papildomus polius, kurie įmontuoti tarp pagrindinių polių. Šie poliai panaikina inkaro MV skersinės dedamosios geometrinėje neutralėje įtaką.
• Dar veiksmingiau magnetinio srauto tankio B pasiskirstymo oro tarpe netolygumui pašalinti yra
kompensacinė apvija, paklota į polių antgalių griovelius, kuri įjungiama į inkaro apviją nuosekliai, taip, kad jos MV būtų priešingos krypties, nei inkaro apvijos MV. Efektas yra, bet išauga kaina, sudėtingesnė konstrukcija. Todėl naudojamos tik didelės galios mašinose (virš 150 kW), esant dideliems apkrovos svyravimams , pvz., valcavimo staklių elektros varikliuose.
• išmagnetinanti inkaro reakcijos įtaka mašinai kompensuojama, didinant žadinimo apvijos MV
(15 – 30 %). Tai pavyksta padaryti, padidinus polių ričių vijų skaičių.

20INKARO APVIJOS ELEKTROVARA
Tai jėga, esanti tarp šepečių. Judant inkaro vijai statoriaus atžvilgiu greičiu v, kiekviename laidininke(pvz., ab) indukuota EV: ex = B
2τ x B(x)
B
l e
y=τ
Bx l v; (kadangi besisukdami laidininkai magnetinį srautą kerta statmenai, tai kampo neįvertiname, sin α = sin 900 = 1). Magnetinio srauto tankio B dydis priklauso nuo laidininko padėties. Norėdami rasti visos apvijos EV, tai reikėtų susumuoti visas elektrovaras, esančias vienoje lygiagretėje šakoje
E ex
Na
= ∑1
2
;
N – bendras apvijos laidininkų skaičius. N/2a – vienos lygiagrečios šakos laidininkų skaičius Įrašę ex reikšmę, turėsime, kad apvijos elektrovara:
E B lv lv Bx x
Na
Na
= =∑ ∑1 1
2 2
;
Bet magnetinio srauto tankis B išsidėstęs pagal kreivę, kurią apytikriai galime pakeisti stačiakampe kreive su vidutine reikšme BBvid..
B B Nax vid
Na
1
2
2∑ = ;
Savo ruožtu, laidininko greitį galima išreikšti: v = n τ 2p ; n – sukimosi greitis (sūkiais per sekundę); τ 2p – rotoriaus perimetras.
Įrašę reikšmes į elektrovaros išraišką, turėsime: E pB Navid= lnτ2
2;
Čia l τ Βvid = Φ − vieno poliaus srautas; Tada:
na
NpE Φ= ;
E = CE Φ n
NUOLATINĖS SROVĖS MAŠINOS SUKIMO MOMENTAS (ELEKTROMAGNETINIS
MOMENTAS)
Dirbant apkrautam generatoriui, apvijos laidininkais tekanti srovė sąveikauja su oro tarpo magnetiniu lauku. Kiekvieną inkaro apvijos laidininką veikia elektromagnetinė jėga: Fx= BBx l ia ;
Jos kryptį nustatome pagal kairės rankos
taisyklę.Elementaraus laidininko sukimo
21
momentas: m f Dx x=
2; (jėga, dauginta iš spindulio, peties) ; čia D – inkaro diametras.
Visų laidininkų su srove sukuriamas sukimo momentas:
=== ∑∑ 211
DliBmM a
N
x
N
x ....
Inkaro laidininko srovę ia išreikšime per srovę Ia – išorinėje grandinėje :
Jei mx ženklai vienodi, bus momentas maximalus Mmax
aI
i aa 2
= ;
Tada sukimo momentas:
NBDa
IlM vid
a
22= ;
Galima Mmax maksimali vertė, kai šepečiai yra fizinėje neutralėje
Inkaro diametras D p=
τπ2
; Tik man: jei yra papildomi poliai, šepečiai visada paliekami geometrinėje neutralėje
Tada turėsime:
NBpa
IlM vid
a
22
2 πτ
= ;
Bet sandauga l τ BBvid = Φ;
Todėl galutinai:
aIaNpM Φ=
π2
M = CM Φ Ια
Srautas, savo ruožtu, priklauso nuo žadinimo apvijos magnetovaros, bet jis priklauso ir nuo inkaro
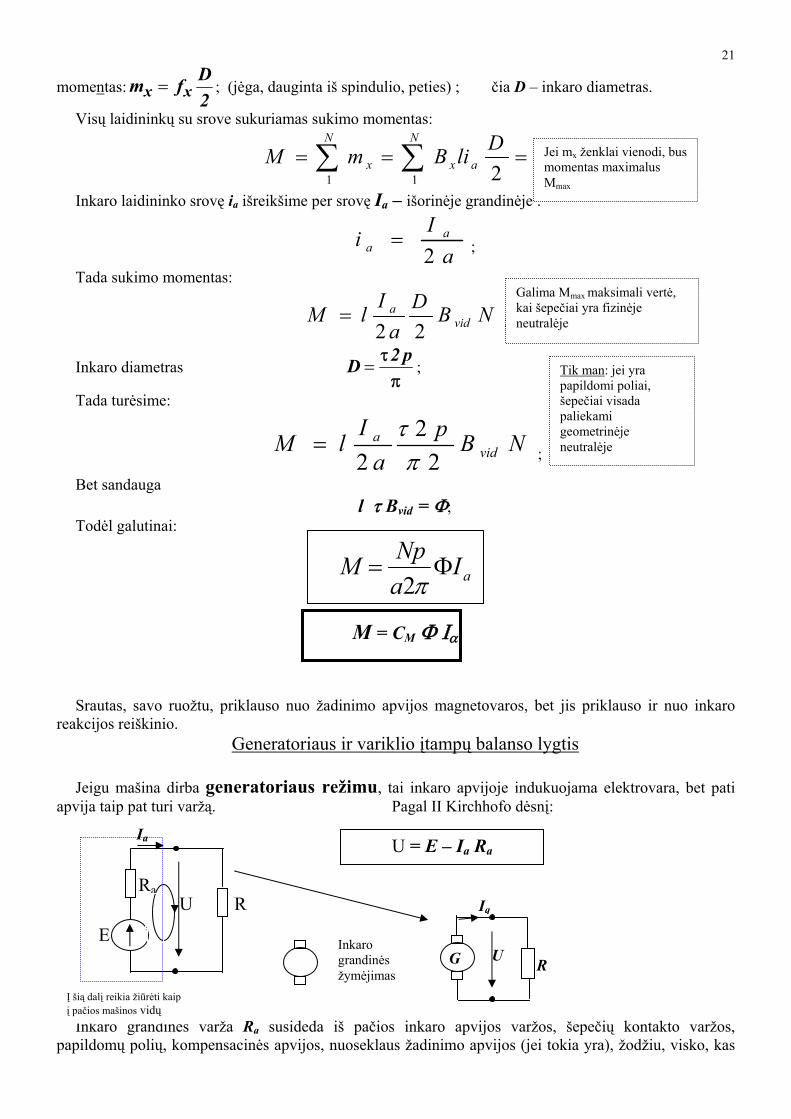
reakcijos reiškinio. Generatoriaus ir variklio įtampų balanso lygtis
Jeigu mašina dirba generatoriaus režimu, tai inkaro apvijoje indukuojama elektrovara, bet pati
apvija taip pat turi varžą. Pagal II Kirchhofo dėsnį: Inkaro grandinės varža Ra susideda iš pačios inkaro apvijos varžos, šepečių kontakto varžos,
papildomų polių, kompensacinės apvijos, nuoseklaus žadinimo apvijos (jei tokia yra), žodžiu, visko, kas
U = E – Ia Ra
Inkaro grandinės žymėjimas
G R U
R Ra
E
Į šią dalį reikia žiūrėti kaip į pačios mašinos vidų
U
Ia
Iq

22nuosekliai įjungta inkaro grandinėje. Šepečių kontakto varža yra netiesinė. Todėl bendroji varža yra taip pat netiesinė.
Šepečių kontakto varža kinta taip, kad, keičiantis srovei, įtampos kritimas nesikeičia. Tada U = E - Ra
’I –ΔUšRa
’ –paties inkaro varža, atmetus kitas varžas; ΔUš ≈ const, plačiame srovės kitimo intervale, kai I =var. Maždaug 1 V tenka, metalo-grafitinių šepečių porai; ir apie 2 V - grafitiniams šepečiams. Norint tiksliau
apskaičiuoti įtampos balansą, tai įvertinama. Mašinos apvijų varža skaičiuojama 750 C temperatūrai. Skaičiuojant reikia atsižvelgti į varžos pasikeitimą. Iš įtampų balanso lygties galima gauti naudingų išvadų ir apie galių balansą. Jei padauginsime iš srovės Ia:
U Ia = E Ia – Ia2 Ra
Mašinos galia
Elektromagnetinė galia, gaunama generatoriaus mechaninės galios sąskaita
Nuostolių galia
Jeigu mašina dirba variklio režimu: Inkaro grandinė jungiama prie išorinės įtampos. Srovei tekant, atsiranda sukimo momentas.
Bet, sukantis inkarui, indukuojasi elektrovara. Maitinanti įtampa turės nugalėti priešveikiančią elektrovarą. Todėl balanso lygtis:
U – E = Ia Ra ;
U = E + Ia Ra ; Čia E – priešveikianti EV.
Jei nebūtų priešveikiančios elektrovaros (E = 0 ) tai srovė būtų lygi:
aa R
U=R
E-U=aI ; tai negautume ir mechaninės energijos, būtų ne
variklis, o tiktai krosnelė. Jeigu padauginsime visus narius iš srovės Ia, tai gausime galių balansą:
EIa - duoda mechaninę energiją. Ši priešveikianti EV ir yra svarbiausią rolę atliekantis narys. Galia gali būti parodoma ir iš šios (jau matytos mums) išraiškos:
nE Φa
Np= N – apvijos laidininkų skaičius
V EU
Ia
Iš tinklo imama galia P1 Elektromagnetinė galia Pm, tai. svarbiausias narys
Šiluma, P0
U Ia = E Ia + Ia2 Ra
Jei abi puses padauginsime iš srovės Ia, ir dar iš (2π/2π) (nes operuojame sukimosi greičiu, o ne kampiniu greičiu –teisingiau būtų operuoti kampiniu greičiu, bet taip jau įprasta, deja))
ΩΦΦ M=2a2Np=
22
aNp= nInIEI aaa π
πππ
Pem= Pmech
Elektromagnetinė galia P em
Mechaninė galia P mech=P2+P0
Jei n –sukimosi greitis [aps/s], tai kampinis greitis Ω = 2π n [rad/s]; [s-1] “ “ “ [aps/min], “ “ Ω = 2π n/60 [rad/min]; [min-1] M – elektromagnetinis momentas.
23 Šios išraiškos ir parodo energijos keitimo priklausomybę ir parodo, kad priešveikianti EV yra tik
naudinga, bet ne žalinga, kaip kad buvo kažkada anksčiau manyta.
NUOLATINĖS SROVĖS GENERATORIAI IR JŲ CHARAKTERISTIKOS
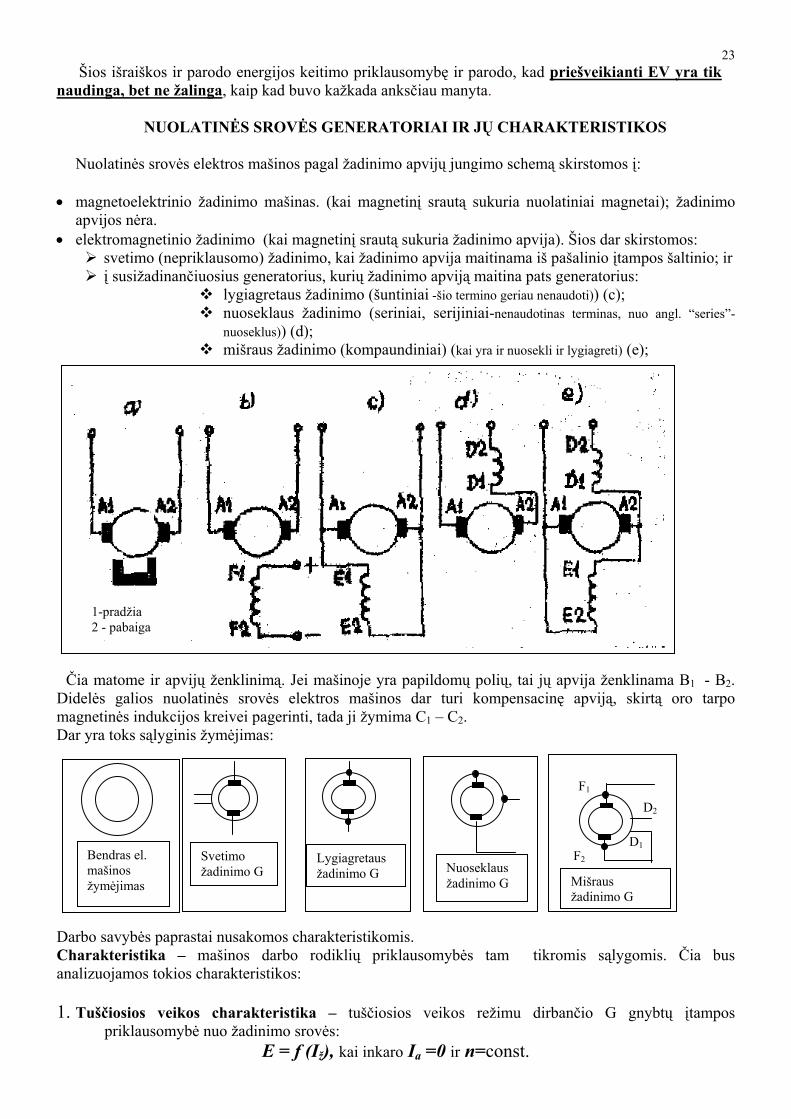
Nuolatinės srovės elektros mašinos pagal žadinimo apvijų jungimo schemą skirstomos į:
• magnetoelektrinio žadinimo mašinas. (kai magnetinį srautą sukuria nuolatiniai magnetai); žadinimo apvijos nėra.
• elektromagnetinio žadinimo (kai magnetinį srautą sukuria žadinimo apvija). Šios dar skirstomos: svetimo (nepriklausomo) žadinimo, kai žadinimo apvija maitinama iš pašalinio įtampos šaltinio; ir į susižadinančiuosius generatorius, kurių žadinimo apviją maitina pats generatorius:
lygiagretaus žadinimo (šuntiniai -šio termino geriau nenaudoti)) (c); nuoseklaus žadinimo (seriniai, serijiniai-nenaudotinas terminas, nuo angl. “series”-
nuoseklus)) (d); mišraus žadinimo (kompaundiniai) (kai yra ir nuosekli ir lygiagreti) (e);
Čia matome ir apvijų ženklinimą. Jei mašinoje yra papildomų polių, tai jų apvija ženklinama B1 - B2.
Didelės galios nuolatinės srovės elektros mašinos dar turi kompensacinę apviją, skirtą oro tarpo magnetinės indukcijos kreivei pagerinti, tada ji žymima C1 – C2.
1-pradžia 2 - pabaiga
Dar yra toks sąlyginis žymėjimas:
Svetimo žadinimo G
Lygiagretaus žadinimo G
D1
F1
F2
D2
Mišraus žadinimo G
Nuoseklaus žadinimo G
Bendras el. mašinos žymėjimas
Darbo savybės paprastai nusakomos charakteristikomis. Charakteristika – mašinos darbo rodiklių priklausomybės tam tikromis sąlygomis. Čia bus analizuojamos tokios charakteristikos: 1. Tuščiosios veikos charakteristika – tuščiosios veikos režimu dirbančio G gnybtų įtampos
priklausomybė nuo žadinimo srovės: E = f (Iž), kai inkaro Ia =0 ir n=const.
242. Apkrovos charakteristika – apkrauto G gnybtų įtampos priklausomybė nuo žadinimo srovės
U = f ( Iž ), kai inkaro Ia = const ir n = const.
3. Išorinė charakteristika – generatoriaus gnybtų įtampos U priklausomybė nuo apkrovos srovės (labiau reikšminga praktikoje):
U = f ( Ia), kai žadinimo Iž = const. ir n=const.
1. Trumpojo jungimo charakteristika – labiau teorinis pobūdis:
Ia = f ( Iž ), kai U = 0 ir n=const. 2. Reguliavimo charakteristika – turinti praktinę reikšmę
Iž = f ( Ia ), kai U = const. ir n=const.
Šios charakteristikos atvaizduoja statines mašinos savybes, charakterizuojančia mašinos nusistovėjusį darbą. Kartais aktualu žinoti mašinų dinamines charakteristikas, kai tos mašinos dirba automatinio valdymo sistemose. Tačiau dinamines charakteristikas nagrinės atskira disciplina.
SVETIMOJO ŽADINIMO GENERATORIUS
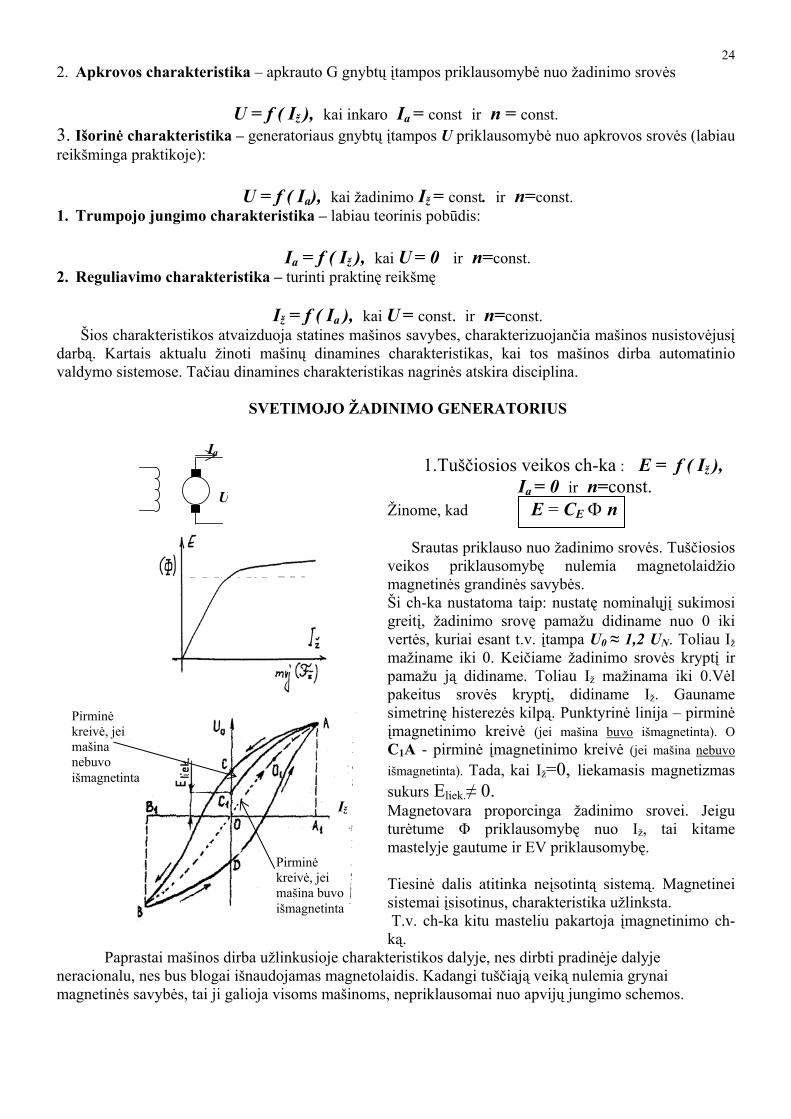
1.Tuščiosios veikos ch-ka : E = f ( Iž ), Ia = 0 ir n=const.
Ia
U
Iž
Pirminė kreivė, jei mašina nebuvo išmagnetinta
Pirminė kreivė, jei mašina buvo išmagnetinta
Žinome, kad E = CE Φ n Srautas priklauso nuo žadinimo srovės. Tuščiosios
veikos priklausomybę nulemia magnetolaidžio magnetinės grandinės savybės. Ši ch-ka nustatoma taip: nustatę nominalųjį sukimosi greitį, žadinimo srovę pamažu didiname nuo 0 iki vertės, kuriai esant t.v. įtampa U0 ≈ 1,2 UN. Toliau Iž mažiname iki 0. Keičiame žadinimo srovės kryptį ir pamažu ją didiname. Toliau Iž mažinama iki 0.Vėl pakeitus srovės kryptį, didiname Iž. Gauname simetrinę histerezės kilpą. Punktyrinė linija – pirminė įmagnetinimo kreivė (jei mašina buvo išmagnetinta). O C1A - pirminė įmagnetinimo kreivė (jei mašina nebuvo išmagnetinta). Tada, kai Iž=0, liekamasis magnetizmas sukurs Eliek.≠ 0. Magnetovara proporcinga žadinimo srovei. Jeigu turėtume Φ priklausomybę nuo Iž, tai kitame mastelyje gautume ir EV priklausomybę. Tiesinė dalis atitinka neįsotintą sistemą. Magnetinei sistemai įsisotinus, charakteristika užlinksta. T.v. ch-ka kitu masteliu pakartoja įmagnetinimo ch-ką.
Paprastai mašinos dirba užlinkusioje charakteristikos dalyje, nes dirbti pradinėje dalyje neracionalu, nes bus blogai išnaudojamas magnetolaidis. Kadangi tuščiąją veiką nulemia grynai magnetinės savybės, tai ji galioja visoms mašinoms, nepriklausomai nuo apvijų jungimo schemos.

252. Trumpojo jungimo ch-ka : Itr = f ( Iž ), kai U = 0 ir n= const Trumpasis jungimas – avarinis reiškinys, sukeliantis nereikalingas pasekmes. Tačiau tr. j. ch-kas
galima nustatyti nebūtinai darbiniame režime. Nustatant ją, būtina prisiminti, kad šiuo atveju žadinimo srovė Iž turi būti pakankamai maža, nes,
kadangi inkaro grandinės suminė varža Ra maža, tai iš G atstojamosios schemos : U = E- IaRa; ir kai U=0; 0=E- IaRa; tada Ia= E /Ra, E= IaRa; (1)
Vadinasi, trumpojo jungimo srovė gali neleistinai padidėti. Laboratorinėmis sąlygomis Iž parenkama taip, kad Ia tr< IaN.
Esant mažai žadinimo srovei Iž, taigi, ir E, pagrindinis srautas Φ bus taip pat mažas, vadinasi, tr. j. ch-ka nustatoma, esant neįsotintai magnetinei sistemai. Taigi, tr. j. ch-ka yra tiesė
Brūkšnine linija pavaizduota trumpojo jungimo ch-ka, kai nuolatinės srovės mašinos magnetinė sistema, prieš nustatant ch-ką, esti visiškai išmagnetinta. Jeigu
magnetinėje sistemoje yra
liekamojo magnetizmo, ch-ka
eina aukščiau (ištisinė linija).
=Itr 2
U=0
EIaNRa
IaN
Iž’
A
T.v. turėtų tiek indukuoti, , kai srovė inkare neteka. E=U (būtų, bet dabar, tr. j. U=0 E turi atsverti įtampa U inkaro apvijos varžoje, ir nesvarbu , ar teka srovė, ar ne,
Ašys sutapdintos dirbtinai, sutampa Iž ašis
Kol neįsotinta – tiesė, vėliau užlinksta
Iž
Turint t.v. charakteristiką ir tr. j. charakteristiką, galima nubrėžti charakteringąjį (reaktyvųjį) trikampį (nes eksperimentiškai yra lengvai išmatuojama), ir kuriuo yra plačiau naudojamasi nuolatinės srovės mašinų teorijoje. Tam: • Atidedame IaN ir brėžiame lygiagretę x ašiai iki tr.j. ch-kos. Gavome tšk. A. • Nuo A brėžiame statmenį žemyn. Gavome tšk. B (tai įtampos U taškas (tr. j. atveju U=0));
• Atidedame BD= IaN * Ra; (įtampos kritimą inkaro varžoje) (čia Ra - suminė inkaro grandinės varža);
• Nuo tšk. D brėžiame lygiagretę x ašiai iki t.v. ch-kos. Gauname tšk. C. • C sujungiame su B. Gavome charakteringąjį trikampį.
Pakomentuosime:
• Taškui A atitinkanti žadinimo srovė yra OB. • Trumpojo jungimo metu E=IaN Ra; (iš (1) išplaukia, nes U=0); Reiškia, taškas D reiškia elektrovarą
E. • Bet šitokiai E sudaryti, jeigu inkaro srovė netekėtų (esant t.v.), pakaktų žadinimo srovės OF
(FC=BD). Kodėl gi, tekant inkaro srovei, tai pačiai E gauti reikia didesnės žadinimo srovės (OB > OF)? Ogi todėl, kad inkaras sukuria skersinę išmagnetinančią reakciją, kuriai nugalėti žadinimo srovę reikia padidinti dydžiu FB.
• Trikampio statinis BD= IaN Ra proporcingas įtampos kritimui inkaro grandinėje, • Trikampio statinis CD= BF proporcingas skersinei išmagnetinančiai inkaro reakcijai,
• Trikampio viršūnė C priklauso t.v. charakteristikai;
Prie įvairių apkrovų
Iž
Itr
• Trikampio viršūnės B ordinatė lygi generatoriaus įtampai U (šiuo, tr. j. at.v.eju, U= 0)
Taigi, reaktyviojo trikampio kraštinės nusako 2
faktorius, dėl kurių sumažėja apkrauto G įtampa: įtampos kritimas inkare ir inkaro reakcija.
Charakteringąjį trikampį pasiūlė Hopkinsas 19 a gale

26Jeigu žinomos charakteringojo trikampio proporcijos, tai lengvai sudaroma tr. j. ch-ka, kuri didelėje
dalyje yra tiesinė. Trumpasis jungimas, kaip ir tuščia veika yra nesunkiai realizuojama ir didelės galios generatoriuose. Sukti nereikės didelės galios. Tokių ribinių režimų bandymai yra praktikuojami bandant ir visas elektros mašinas. Jie suteikia daug informacijos.
3. Apkrovos ch-ka : U = f ( Iž ), kai Ia = const ir n= const
Taigi, apkrovimo charakteristikos atskiras atvejis yra t.v. ch-ka. Inkaro grandinės įtampų balanso lygtis:
U = E – Ia Ra ; Tačiau apkrautame generatoriuje sumažėja ir pati EV, atsiranda reiškinys, kuris sumažina srautą dėl
išmagnetinančio inkaro reakcijos poveikio. EV sumažėjimą dėl inkaro reakcijos galime įvertinti tariamu žadinimo srovės sumažėjimu.
Išmagnetinantis inkaro reakcijos poveikis proporcingas inkaro srovei. Sudarysime apkrovos ch-ką:
• Kai žadinimo srovė Iž=OA1, tuščiosios veikos įtampa būtų U0=A1BB1. (atidedame) • Kadangi G apkrautas srove Ia, tai jo gnybtų įtampa yra U = A1A (atidedame) • Atidėkime AB = IaRa – įtampos kritimą
inkare; • Iš taško B brėžiame lygiagretę x ašiai iki tš.
C; C sujungiame su A. Gavome charakteringąjį trikampį.
• Skersinė inkaro reakcija proporcinga inkaro srovei Ia (kai magnetinė grandinė neįsotinta). Vadinasi, esant Ia= const, galios sąlyga : AB= const; CB= const. Iš
čia išplaukia, kad apkrovimo ch-ka – tai charakteringojo trikampio viršūnės A geometrinė taškų vieta, kai trikampio viršūnė C juda t.v. ch-kos kreive, o statinis CB lygiagretus su abscisių ašimi.
• Keičiantis inkaro srovės dydžiui, charakteringojo trikampio proporcijos nesikeis, keisis tiktai dydis. Pasinaudodami juo, mes galime rasti kitus ch-kos taškus., esant įvairioms srovėms;
Taigi, kad nubrėžti charakteringąjį trikampį iš bandymo duomenų, reikia turėti t.v. ch-ką; Ra ; ir bent vieną tašką U iš apkrovos ch-kos (jei iš tr. j. ch-kos, tai tik atvejui, kai U=0).
Atkreipsime dėmesį į tai, kad: įtampa U (AA1) yra mažesnė už už t.v. įtampą U0 (A1BB1): • dydžiu (B1B) dėl skersinės inkaro išmagnetinančiosios reakcijos ; • dydžiu (AB) - dėl įtampos kritimo inkaro varžoje,nes:
tekant inkaro apvija srovei Ia, atsiranda skersinė inkaro išmagnetinančioji reakcija, kuri sumažina oro tarpo pagrindinį magnetinį srautą, taip pat ir įtampą dydžiu BB1. Jeigu inkaro reakcijos nebūtų, tai įtampai A1B sukurti pakaktų žadinimo srovės Iž = OC1.
Vadinasi, dėl išmagnetinančios reakcijos žadinimo srovę turime padidinti dydžiu C1A1 = CB. Didėjant įsotinimui, statinis CB ilgėja, o apkrovimo ch-ka pereina į kreivę 3. Eksperimentinis ch-kos sudarymas yra gana keblus, esant didelės galios generatoriui. Todėl, turėdami
t.v. ch-ką, galime sudaryti apkrovos ch-ką, skaičiuojant grafiškai. Tenka pastebėti, kad tai, kas čia kalbėta, buvo pastebėta jau seniai ir tam tikra prasme yra klasika ir
yra teisinga apytikriai (istorizmo požiūriu). Pastaraisiais metais atsiradę nauji magnetinių grandinių tyrimo metodai, kompiuterinės programos baigtinių elementų metodu FEMM, leido daug tiksliau paskaičiuoti magnetinius laukus, ir pastebėta, kad mažesnių srovių srityje (kai dar neprisotinta), skersinė
27inkaro reakcija daug mažiau sumažina (arba visai nesumažina) pagrindinį srautą. T.y. charakteringas trikampis, slinkdamas žemyn, mažėja. Žr. ch-ka 4.
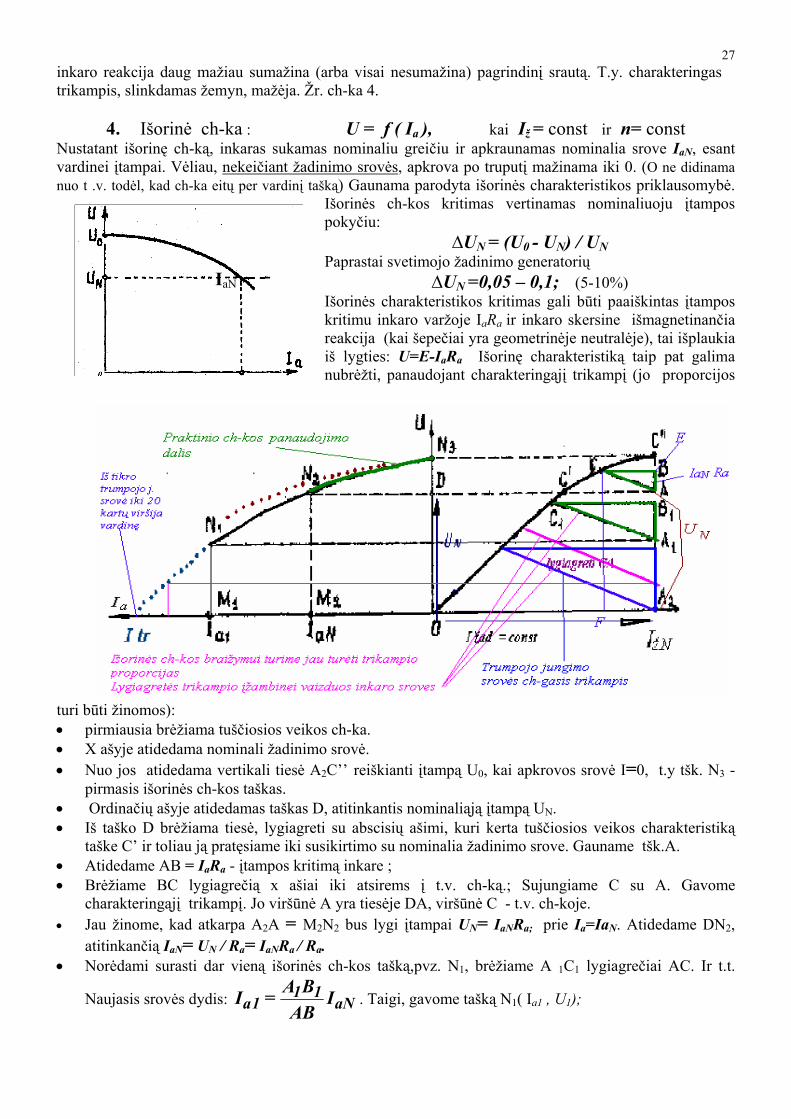
4. Išorinė ch-ka : U = f ( Ia ), kai Iž = const ir n= const
Nustatant išorinę ch-ką, inkaras sukamas nominaliu greičiu ir apkraunamas nominalia srove IaN, esant vardinei įtampai. Vėliau, nekeičiant žadinimo srovės, apkrova po truputį mažinama iki 0. (O ne didinama nuo t .v. todėl, kad ch-ka eitų per vardinį tašką) Gaunama parodyta išorinės charakteristikos priklausomybė.
Išorinės ch-kos kritimas vertinamas nominaliuoju įtampos pokyčiu:
∆UN = (U0 - UN) / UNPaprastai svetimojo žadinimo generatorių
∆UN =0,05 – 0,1; (5-10%) Išorinės charakteristikos kritimas gali būti paaiškintas įtampos kritimu inkaro varžoje IaRa ir inkaro skersine išmagnetinančia reakcija (kai šepečiai yra geometrinėje neutralėje), tai išplaukia iš lygties: U=E-IaRa Išorinę charakteristiką taip pat galima nubrėžti, panaudojant charakteringąjį trikampį (jo proporcijos
turi būti žinomos):
IaN
• pirmiausia brėžiama tuščiosios veikos ch-ka. • X ašyje atidedama nominali žadinimo srovė. • Nuo jos atidedama vertikali tiesė A2C’’ reiškianti įtampą U0, kai apkrovos srovė I=0, t.y tšk. N3 -
pirmasis išorinės ch-kos taškas. • Ordinačių ašyje atidedamas taškas D, atitinkantis nominaliąją įtampą UN. • Iš taško D brėžiama tiesė, lygiagreti su abscisių ašimi, kuri kerta tuščiosios veikos charakteristiką
taške C’ ir toliau ją pratęsiame iki susikirtimo su nominalia žadinimo srove. Gauname tšk.A. • Atidedame AB = IaRa - įtampos kritimą inkare ; • Brėžiame BC lygiagrečią x ašiai iki atsirems į t.v. ch-ką.; Sujungiame C su A. Gavome
charakteringąjį trikampį. Jo viršūnė A yra tiesėje DA, viršūnė C - t.v. ch-koje. • Jau žinome, kad atkarpa A2A = M2N2 bus lygi įtampai UN= IaNRa; prie Ia=IaN. Atidedame DN2,
atitinkančią IaN= UN / Ra= IaNRa / Ra. • Norėdami surasti dar vieną išorinės ch-kos tašką,pvz. N1, brėžiame A 1C1 lygiagrečiai AC. Ir t.t.
Naujasis srovės dydis: I B Ia a11= A
AB1
N . Taigi, gavome tašką N1( Ia1 , U1);

28
Čia U AA A
UN= A2 12
.
Jeigu srovė Ia bus du kartus didesnė, tai ir trikampis bus du kartus didesnis. Jeigu išorinę ch-ką vaizduosime tik iki nominalios srovės, tai įtampa pasikeis nežymiai.
Tik trumpojo jungimo srovės yra daug kartų didesnės už nominaliąją, iki 20 kartų. Iš tikrųjų horizontalusis trikampio statinis , įtampai U mažėjant, didėja ne visai proporcingai srovei Ia.
Todėl reali išorinė ch-ka būtų parodyta punktyru (rudu ).
• Išorinės ch-kos taškas su U=0 ,– tai būtų trumpojo jungimo režimo srovės taškas, esant pilnam žadinimui. Kadangi Ra maža, tai ši srovė 5-20 kartų viršija IaN. Tai gana pavojinga, nes atsiranda elektros lankas tarp šepečių (apskritiminė ugnis), taip pat dideli mechaninės jėgos ir sukimo momentai. Todėl eksploatuojant vidutinės ir didelės galios generatorius, įjungiami į inkaro grandinę greit paveikiantys (per 0,01 – 0,05 sek.) automatiniai išjungikliai. Vienok, jie neapsaugo nuo trumpojo jungimo mašinos viduje.
5. Reguliavimo ch-ka Iž = f ( Ia ) , kai n = nN = const, U= const.
Priežastinio ryšio tarp Iž ir Ia nėra (jei keisime Ia, iš tiesų Iž nesikeis). Čia Iž – nepriklausomas dydis Ji tik parodo, kaip reikia keisti žadinimo srovę, kad, kintant srovei, įtampa nesikeistų. Eksperimentiškai ji nustatoma taip: generatoriui dirbant neapkrautam, žadinimo grandinėje nustatoma srovė Iž0 , kuri atitinka nominaliąją generatoriaus gnybtų įtampą UN. Didinant G apkrovą, didėja įtampos kritimas suminėje varžoje Ra , taip pat didėja skersinė inkaro išmagnetinančioji reakcija. (Šepečiai pasukti nuo geometrinės neutralės G inkaro sukimosi kryptimi kampu α.) Vadinasi, G gnybtų įtampa kris. Taigi, didėjant inkaro apkrovos srovei Ia,, kad įtampa išliktų pastovi, reikia didinti žadinimo srovę Iž.
Reguliavimo ch-ka brėžiama šitaip: (reikia turėti t.v. ch-ką ; Ra ; charakteringąjį trikampį ir įbrėžti seriją trikampių su ta sąlyga, kad U=const.)
• Ordinačių ašyje atidedamas tšk. D, kurį atitinka UN;

29• Iš tš.D keliamas statmuo iki susikirtimo su t.v. ch-ka, gaunamas C’. Pratęskime liniją, jos tęsinyje
vėliau bus tšk. A) • Atidedame DD’= IaN Ra ir brėžiame lygiagretę x ašiai iki C. • Įbrėžiame trikampį ABC (atitinkantis nominaliai srovei IN., o proporcijos jau t.b. žinomos); • Taško C’ projekcija į x ašį lygi žadinimo srovei OF, kai apkrovos srovė Ia=0. Taigi, F – reguliavimo
ch-kos pirmasis taškas. • Kadangi UN = const, tai visų ch-gųjų trikampių apatinio smailiojo kampo viršūnė bus tiesėje DA. • Ia ašyje atidedama nominalioji srovė IaN= Ia1 (taškas G1). Gaunamas ch-kos antrasis taškas F1, kuris
atitinka nominalųjį režimą. • Norint surasti kitus žadinimo srovės taškus, pakanka nubrėžti atkarpas, // su AC, pvz., A 1C1. • Gauname žadinimo srovę OF’’;
• o jai atitinkančią inkaro srovę Ia2 nubrėšime pagal proporciją: aNa IAC
CI 11
2A
= .
Reguliavimo ch-ka srovių ašyse pavaizduosime atskirai:
Kadangi ši ch-ka gali būti gauta, turint t.v. ch-ką ir charakteringojo trikampio proporcijas, todėl yra svarbu jas žinoti.
Kyla statyn, nes ryškėja inkaro reakcija
Tai galima apskaičiuoti arba surasti eksperimentiškai. Skaičiuojant, reikia žinoti Ra. Išmagnetinantį poveikį irgi
galima žinoti. Jeigu turime realią mašiną, tai galima eksperimentiškai nustatyti.
Jeigu nežinome trikampio, bet žinome t.v. ch-ką ir bent vieną išorinės ch-kos tašką A (iš apkrovos ch-kos) lygų U1(geriausia nominaliam taškui), o taip pat Ra ,galima trikampį sudaryti. Toliau atidedame IaRa ir t.t.
Kartais keblu, kad reikia turėti apkrovos ch-kos tašką. Pvz., turime apkrauti galingą 1000-čių kW generatorių. Problema - kur energiją dėti?
Tada bus paprasčiau atlikti trumpojo jungimo bandymą, galėsime sukti su mažu varikliu.
Patogiau charakteringąjį trikampį sudaryti iš tr.j. ch-kos. Turime turėti Itr1, Iž; Ra. Reikia parinkti trumpojo jungimo srovę artimą nominaliai.

30
Inkaro grandinės varžos matavimas:
Inkaro grandinės varžą yra gana sunku išmatuoti. Jeigu inkaras stovi, tai jos varžos dydis gali priklausyti nuo atsitiktinės kontakto varžos. Taigi, reikia
žinoti varžą, kuri yra, tekant nominaliai srovei. Reikia matuoti, kai sukasi ir kai teka nominalaus dydžio srovė. Todėl geriausiai tinka voltmetro-
ampermetro būdas.
Nors ir nesužadintame G gali indukuotis liekamojo magnetizmo EV Eliek
Iš anksto nežinome nei jos krypties, nei jos dydžio. U ± Eliek = IRa
Atliekami du matavimai, taip, kad vieno matavimo metu Eliek būtų teigiama, o antruoju at.v.eju Eliek neigiama, pakeičiant rotoriaus sukimosi kryptį.(Žinoma, jeigu galima sukti, o jei ne, tai pakeičiamas nuolatinės srovės poliarumas):
1) U1 + Eliek = I1Ra
2) U2 - Eliek = I2Ra U1 + U2 = Ra ( I1 + I2 )
R UI Ia = U1 +
+2
1 2
Pvz, U1 =10V; U2=8V; Sudedame, taip eliminuojame
nežinomą dydį Eliek

31LYGIAGRETAUS ŽADINIMO GENERATORIUS IR JO
CHARAKTERISTIKOS Lygiagretaus žadinimo generatorius priklauso susižadinančiųjų generatorių klasei. Susižadinimo
principas pagrįstas tuo, kad: • kartą įmagnetinta magnetinė mašinos sistema išlaiko nedidelį liekamojo magnetizmo srautą Φliek. • Φliek besisukančio inkaro apvijoje indukuoja EV Eliek, kuri žadinimo apvijoje sukuria nedidelę
žadinimo srovę Iž; Φliek→ Eliek→ Iž; • Jeigu magnetovara Iž wž savo kryptimi sutaps su Φliek , tai ji sustiprins pagrindinių polių srautą; • O dėl to padidės generatoriaus EV, taip pat žadinimo srovė Iž;. • Susižadinimas tęsis iki tol, kol generatoriaus įtampą atsvers įtampos kritimas žadinimo grandinėje,
t.y. Iž Rž = U0. Lygiagretaus žadinimo generatorius susižadina iki įtampos, kurią nulemia t.v. ir žadinimo apvijos V-A ch-kų susikirtimo taškas
Žadinimo kontūro įtampų balanso lygtis pagal II Kirchhoffo dėsnį:
e + eLž =Rž iž; čia eLž – saviindukcijos elektrovara (žadinimo apvijoje; inkare labai maža) Iš čia e = Rž iž -eLž ;
O kadangi e didtLz z= -L ;
Gauname:
e R Ldidtz z
z= iz + (1)
čia e – elektrovaros momentinė reikšmė; iž – žadinimo grandinės srovės momentinė reikšmė; Lž – lygiagretaus žadinimo apvijos ir inkaro induktyvumų suma; Rž - žadinimo grandinės aktyvioji varža . Ji susideda iš: Rž = Ra +Rš + RE +R’
E; Ra – inkaro, Rš – šepečių; RE – lygiagretaus žadinimo apvijos aktyvioji varža; R’
E – valdoma, reguliuojama kintamoji varža. Šiame paveiksle matome atitinkamus (1) lygties narius:
Lž
1 – tuščiosios veikos ch-ka; 2 – įtampos kritimas žadinimo kontūro aktyviojoje varžoje Rž..

32 (1) lygtį perrašome taip: (ta vertikali atkarpa-skirtumas) (2)
( )didt
RL
z z
z=
e - iz (2)
Mus domina žadinimo srovės kitimo greitis ir ženklas. Kadangi Lž > 0 (induktyvumas gali būti tik teigiamas), tai iš sąlygos esant
( e-iž Rž ) > 0, gauname: didt
z > 0
Ši nelygybė rodo, kodėl didėja žadinimo srovė (didėjančios funkcijos iž išvestinė teigiama).
Paveiksle matome, kad žadinimo srovė liausis didėti, kai didt
= 0 z , t.y. taške A.
Vadinasi, žadinimo srovės nusistovėjęs dydis lygus Iž0 , o įtampos nusistovėjęs dydis: U0=Ea0. (2) lygtis nusako : lygiagretaus žadinimo generatoriaus susižadinimo sąlygas:
1. Magnetinėje mašinos sistemoje turi būti liekamasis magnetizmas, kuris sukuria magnetinį srautą sukantis rotoriui, magnetinis srautas indukuoja Eliek.
2. žadinimo apvija turi būti prijungta taip, kad jos magnetinio srauto kryptis sutaptų su liekamojo magnetinio srauto Φliek kryptimi;
3. žadinimo grandinės varža negali viršyti kritinės varžos reikšmės Rž kr , nes tuo atveju ( e-iž Rž ) < 0 ir susižadinimo procesas nebevyktų.
4. Inkaro sukimosi greitis turi būti didesnis už kritinį nkr ; jeigu sukimosi greitis nepakankamai didelis, tai tuščiosios veikos. charakteristiką vaizduoja kreivė 3 , kuriai kritinė varža R kr2 < Rkr1, vadinasi, mažėjant sukimosi greičiui, kritinė varža taip pat mažėja.
Charakteristikos
Gali būti sudaromos tos pačios, kaip ir svetimo žadinimo generatoriaus.
Tuščiosios veikos ch-ka.
Φ
Ιžw
E nuo jungimo nepriklauso, nulemia pagaminimas
Kur R>kritinę, nebesusižadins, nebeįmanoma sudaryti pilnos ch-kos
Ją sudarant eksperimentiškai, reiktų lygiagretaus žadinimo generatorių paversti svetimo žadinimo generatoriumi (nes realiai generatorius jau apkrautas savuoju žadinimu) Tačiau dėl mažos imamos galios žadinimui (apie 1%) galima sudaryti ir realiai. Pradžia gali eiti ne nuo 0. (Kodėl ? Todėl, kad kur jau nebesusižadina, virš kritinės varžos, nebesudarysi ch-kos) Kadangi lygiagretaus žadinimo G žadinamas tik viena kryptimi, tai jo tuščiosios veikos charakteristika išsidėsčiusi tiktai pirmajame kvadrante.
Lygiagretaus žadinimo generatoriaus apkrovos ir reguliavimo ch-kos nesiskirs nuo atitinkamų svetimojo žadinimo generatoriaus ch-kų.
33
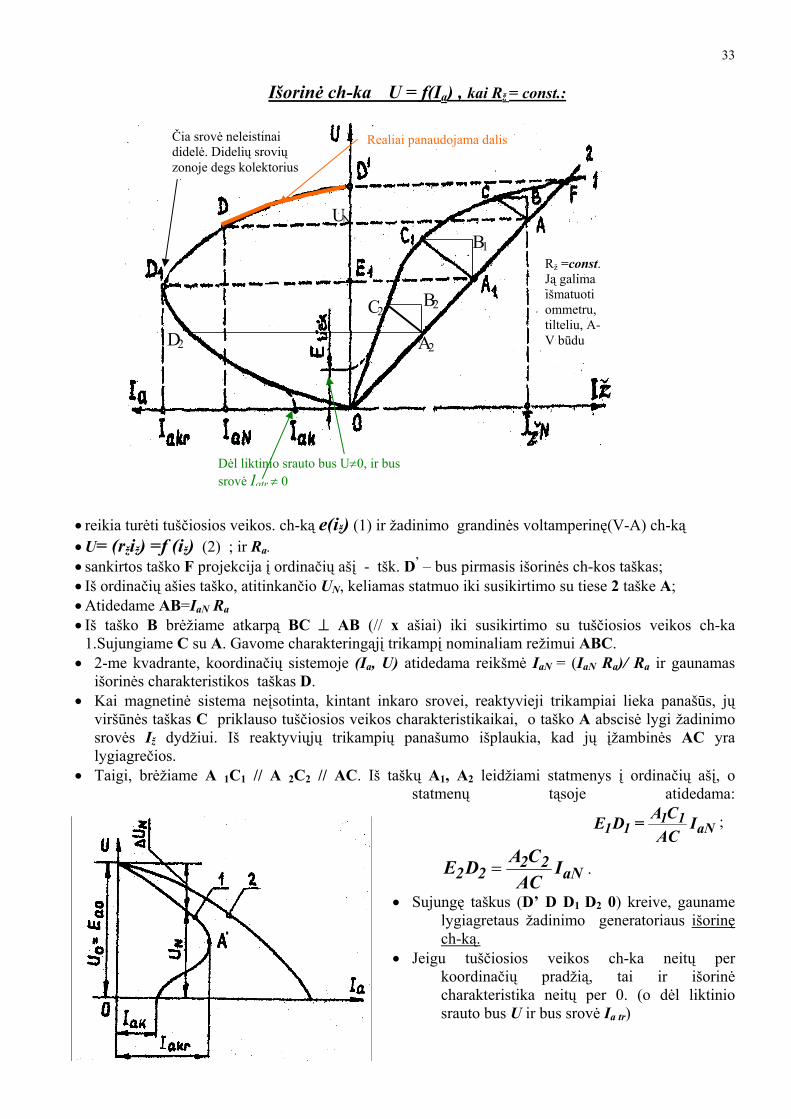
Išorinė ch-ka U = f(Ia) , kai Rž = const.:
UN
• reikia turėti tuščiosios veikos. ch-ką e(iž) (1) ir žadinimo grandinės voltamperinę(V-A) ch-ką • U= (ržiž) =f (iž) (2) ; ir Ra. • sankirtos taško F projekcija į ordinačių ašį - tšk. D’ – bus pirmasis išorinės ch-kos taškas; • Iš ordinačių ašies taško, atitinkančio UN, keliamas statmuo iki susikirtimo su tiese 2 taške A; • Atidedame AB=IaN Ra • Iš taško B brėžiame atkarpą BC ⊥ AB (// x ašiai) iki susikirtimo su tuščiosios veikos ch-ka
1.Sujungiame C su A. Gavome charakteringąjį trikampį nominaliam režimui ABC. • 2-me kvadrante, koordinačių sistemoje (Ia, U) atidedama reikšmė IaN = (IaN Ra)/ Ra ir gaunamas
išorinės charakteristikos taškas D. • Kai magnetinė sistema neįsotinta, kintant inkaro srovei, reaktyvieji trikampiai lieka panašūs, jų
viršūnės taškas C priklauso tuščiosios veikos charakteristikaikai, o taško A abscisė lygi žadinimo srovės Iž dydžiui. Iš reaktyviųjų trikampių panašumo išplaukia, kad jų įžambinės AC yra lygiagrečios.
• Taigi, brėžiame A 1C1 // A 2C2 // AC. Iš taškų A1, A2 leidžiami statmenys į ordinačių ašį, o statmenų tąsoje atidedama:
E D CAC
IaN1= A1
1 1 ;
E D A CAC
IaN2 22 2= .
• Sujungę taškus (D’ D D1 D2 0) kreive, gauname lygiagretaus žadinimo generatoriaus išorinę ch-ką.
• Jeigu tuščiosios veikos ch-ka neitų per koordinačių pradžią, tai ir išorinė charakteristika neitų per 0. (o dėl liktinio srauto bus U ir bus srovė Ia tr)
C2
A2
B2
B1
D2
Realiai panaudojama dalis Čia srovė neleistinai didelė. Didelių srovių zonoje degs kolektorius
Rž =const. Ją galima išmatuoti ommetru, tilteliu, A-V būdu
Dėl liktinio srauto bus U≠0, ir bus srovė I ≠ 0 atr
34Atskirai pavaizduosime ir palyginsime išorinę ch-ką svetimo (2 kreivė) ir lygiagretaus žadinimo
(1 kreivė) generatorių. Lygiagretaus žadinimo generatoriaus išorinė ch-ka minkštesnė, negu svetimojo žadinimo
žadinimo generatoriaus: 1 - lygiagretaus žadinimo generatoriaus išorinė ch-ka; 2 – svetimojo žadinimo generatoriaus išorinė ch-ka;
Lygiagretaus žadinimo generatoriaus išorinės ch-kos spartų kritimą galima paaiškinti tuo, kad be priežasčių, dėl kurių mažėja svetimojo žadinimo generatoriaus įtampa (inkaro išmagnetinimo reakcija ir įtampos kritimas inkaro varžoje Ra) , yra dar ir trečia įtampos mažėjimo priežastis, kurią sukelia pirmosios dvi – įtampos mažėjimas prie žadinimo grandinės gnybtų (svetimojo žadinimo generatoriaus žadinimo grandinės gnybtų įtampa pastovi).
Taške A inkaro srovė pasiekia maksimumą, lygų Ia kr , o paskui pradeda mažėti iki trumpojo jungimo srovės Ia tr< Ia kr. Vadinasi, lygiagretaus žadinimo generatoriui trumpojo jungimo srovė nepavojinga. Tačiau, trumpojo jungimo srovė Ia tr yra nedidelė tik nusistovėjusi. O pereinamojo proceso metu (kol ateis į tą tašką) pasieks dideles sroves Ia kr, kuri didesnės galios generatoriuose yra pavojingos 2 požiūriais: 1. Šiluminiu požiūriu, nes gadina izoliaciją. (Trumpą laiką, nors ir didelė srovė, nespės įkaisti
mašina). 2. Be to, nuolatinės srovės mašinoms didelės srovės pavojingos dėl srovės komutacijos (šepečių
kontaktų). Kyla pavojus, kad tarp šepečio ir kolektoriaus įsižiebs elektros lankas. Trumpojo jungimo ch-ka neturi prasmės Itr = f(Iž). Ją galima, esant reikalui, sudaryti, pakeitus schemą (pakeitus žadinimo pobūdį)
Naudingi patarimai:
Jeigu bandome lygiagretaus žadinimo generatorių ir jis nesusižadina, tai reikia patikrinti: • Žadinimo grandinės varžą. Jeigu ir po to nesusižadina, tai galima spėti, kad neteisingai sujungta apvija,
tada reikia perjungti žadinimo arba inkaro apvijos kryptį. Jeigu ir po to nesusižadina, tai galima galvoti, kad nėra liekamojo magnetizmo.
• Pasitaiko ir tokie atvejai, kada susižadina generatorius, bet ne tuo poliarumu. Tam, kad pakeisti poliarumą, reikia permagnetinti.(Per žadinimo apviją iš atskiro šaltinio praleisti priešingos krypties srovę – pakeisti Φliek kryptį.)
• Būna, kad avarinio režimo metu pasikeičia generatoriaus duodamas poliarumas. Taip pasitaiko, kada generatorius dirba su varikliu. Šiam reiškiniui pašalinti reikia permagnetinti.
• Įtampos reguliavimą galima atlikti ribotame intervale, nes perėjus per kritinę varžos reikšmę, įtampos daugiau negalėsime sumažinti;
• Čia nesistengiame išlaikyti Iž = const, čia yra kita sąlyga išorinei ch-kai sudaryti, kinta tiktai apkrova, o žadinimo srovė keičiasi savaime.
• Susižadinimo efektą pastebėjo Symensas 19 a.
Ia=Iž
NUOSEKLIOJO ŽADINIMO GENERATORIUS
Nuosekliojo žadinimo generatoriaus žadinimo ir apkrovos srovė yra ta pati (Iž =Ia), todėl šio generatoriaus savybes nusako išorinė ch-ka (OAA1A2).
Visas likusias charakteristikas galima gauti, prijungus prie generatoriaus svetimą žadinimą.
Kadangi reaktyviųjų trikampių viršūnių A A1 A2 ordinatės lygios generatotoriaus gnybtų įtampai, o viršūnės C C1 C2 sutampa su tuščiosios veikos charakteristika, ir šių trikampių kraštinių ilgiai proporcingi inkaro (šiuo atveju ir žadinimo) srovei, tai nubrėžti išorinę ch-ką 2 nesudėtinga.
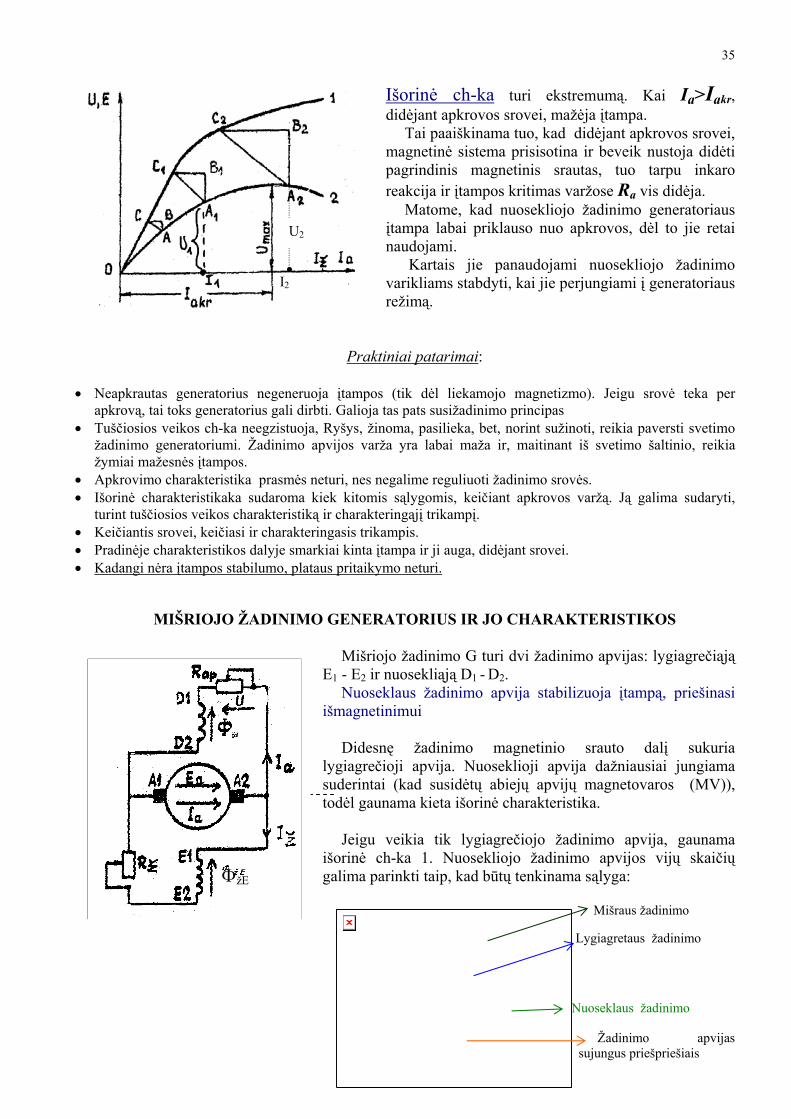
35
Išorinė ch-ka turi ekstremumą. Kai Ia>Iakr, didėjant apkrovos srovei, mažėja įtampa.
U2
I2
Tai paaiškinama tuo, kad didėjant apkrovos srovei, magnetinė sistema prisisotina ir beveik nustoja didėti pagrindinis magnetinis srautas, tuo tarpu inkaro reakcija ir įtampos kritimas varžose Ra vis didėja.
Matome, kad nuosekliojo žadinimo generatoriaus įtampa labai priklauso nuo apkrovos, dėl to jie retai naudojami.
Kartais jie panaudojami nuosekliojo žadinimo varikliams stabdyti, kai jie perjungiami į generatoriaus režimą.
Praktiniai patarimai:
• Neapkrautas generatorius negeneruoja įtampos (tik dėl liekamojo magnetizmo). Jeigu srovė teka per apkrovą, tai toks generatorius gali dirbti. Galioja tas pats susižadinimo principas
• Tuščiosios veikos ch-ka neegzistuoja, Ryšys, žinoma, pasilieka, bet, norint sužinoti, reikia paversti svetimo žadinimo generatoriumi. Žadinimo apvijos varža yra labai maža ir, maitinant iš svetimo šaltinio, reikia žymiai mažesnės įtampos.
• Apkrovimo charakteristika prasmės neturi, nes negalime reguliuoti žadinimo srovės. • Išorinė charakteristikaka sudaroma kiek kitomis sąlygomis, keičiant apkrovos varžą. Ją galima sudaryti,
turint tuščiosios veikos charakteristiką ir charakteringąjį trikampį. • Keičiantis srovei, keičiasi ir charakteringasis trikampis. • Pradinėje charakteristikos dalyje smarkiai kinta įtampa ir ji auga, didėjant srovei. • Kadangi nėra įtampos stabilumo, plataus pritaikymo neturi.
MIŠRIOJO ŽADINIMO GENERATORIUS IR JO CHARAKTERISTIKOS
Mišriojo žadinimo G turi dvi žadinimo apvijas: lygiagrečiąją E1 - E2 ir nuosekliąją D1 - D2.
Nuoseklaus žadinimo apvija stabilizuoja įtampą, priešinasi išmagnetinimui
Didesnę žadinimo magnetinio srauto dalį sukuria
lygiagrečioji apvija. Nuoseklioji apvija dažniausiai jungiama suderintai (kad susidėtų abiejų apvijų magnetovaros (MV)), todėl gaunama kieta išorinė charakteristika.
Jeigu veikia tik lygiagrečiojo žadinimo apvija, gaunama
išorinė ch-ka 1. Nuosekliojo žadinimo apvijos vijų skaičių galima parinkti taip, kad būtų tenkinama sąlyga: ΦžΕ
Mišraus žadinimo
Lygiagretaus žadinimo
Nuoseklaus žadinimo
Žadinimo apvijas sujungus priešpriešiais

36∆U1 = ∆U2 ,
Šiuo atveju mišraus žadinimo (kompaundinio) G-riaus išorinė charakteristika 3 bus artima tiesei: U ≅ UN.
Sutartinai įjungta nuoseklaus žadinimo apvija (NŽA) stabilizuoja įtampą, koreguoja srautą. Naudojami generatoriai ten, kur reikia palaikyti įtampą.
Kai žadinimo apvijos įjungtos priešpriešiais, apkrovos srovei didėjant, įtampa smarkiai krinta (4 kreivė). Taip dažnai jungiamos suvirinimo generatorių apvijos, kai reikia gauti staigiai
krintančią išorinę ch-ką. Tada gaunama stabilizuota srovės reikšmė. Mišraus žadinimo generatoriai pasižymi įvairesnėmis savybėmis ir galimybėmis. Naudojami
generatoriai, kuriuose viena apvija yra kaip pagrindinė, o kita yra mažiau įtakos turinti (silpnai veikianti) į magnetovaros sukūrimą. Nuo to priklauso charakteris. Galimi jungimo variantai, kai abi apvijos veikia sutartinai, arba priešpriešiais. Svarbiausia savybė – atitinkama išorinė charakteristika. Sudarysime iš tuščiosios veikos charakteristikos, jeigu žinoma lygiagretaus žadinimo generatoriaus volt-amperinė ch-ka.
Nuoseklaus žadinimo apvija priešinasi išmagnetinančio poveikio įtakai. Todėl charakteringasis
trikampis keičia proporcijas. Gali pavirsti vertikalia tiese, arba, priešingos krypties: Tarkime, lygiagretaus žadinimo generatoriaus charakteringasis trikampis buvo toks:
Žinome, kad CB dydžiu sumažėjo pagrindinis srautas (žadinimo srovės masteliu) dėl išmagnetinančios inkaro reakcijos. Įjungus suderintai papildomą nuoseklaus žadinimo apviją, (žinodami inkaro srovę ir vijų skaičių) galima pilnai kompensuoti išmagnetinimą ar “perkompensuoti” ir tada trikampio kraštinė CB trumpėja, ar net trikampis “persiverčia” iš kairės į dešinę pusę. A
B C
Charakteringojo trikampio taškas C
visada atsiremia į t.v. ch-ką, o taškas A – į voltamperinę ch-ką.
C’’
A
B C C’
A
BC C’
U E
Iž
Nuoseklaus žadinimo apvija gali būti įvertinta atitinkamu charakteringojo trikampio pasikeitimu. Nuoseklaus žadinimo apvija (NŽA) stabilizuoja įtampą. Tai supaprastina įtampos stabilumą užtikrinančių reguliatorių konstrukciją.
Norint gauti kitokio pobūdžio charakteristiką,

37 nuoseklaus žadinimo apvija gali būti jungiama priešpriešiais.(Gaunama stabilizuota srovės
reikšmė.) Čia buvo charakteristikos, atspindinčios generatorių statines savybes. Priežastinius ryšius, kuriuos grafiškai išreiškia charakteringasis trikampis, galima ir kitaip pavaizduoti.
Galima ir statines charakteristikas pavaizduoti struktūrine schema:
1/R U I
I = UR
= U 1R
⎛⎝⎜
⎞⎠⎟
Ce n Φ Ε n=const
1/R Generatoriaus apkrovą atvaizduojantis elementas
I priklauso nuo U tokiu ryšiu
Norint gauti E, Φ reikia padauginti iš CEn (jei n=const). Jei būtų n≠const, reiktų jį vaizduoti kaip kitą elementą atskirai
Pavyzdžiui, svetimo žadinimo generatoriui sudarysime struktūrinę schemą statiniam režimui (kaip
keičiasi srovė, keičiantis žadinimo srovei).
čia nekinta apsisukimai, srovė. Jei srovės kistų, reikėtų induktyvumo blokų; jei apsisukimai kistų,
reikėtų tai įvertinti atskiru kintamuoju. Panašiai galima sudaryti lygiagretaus žadinimo generatoriaus struktūrinę schemą. Galima modeliuoti, pvz, “Simulinku”
Lygiagretus nuolatinės srovės generatorių darbas
Nuolatinės srovės generatoriai gali būti jungiami lygiagrečiam darbui. Jungiant lygiagrečiam darbui
kelis generatorius, reikia laikytis tokių sąlygų: 1. Prijungiamojo generatoriaus elektrovara Ea0 turi būti lygi tinklo įtampai UT; 2. Prijungiamojo generatoriaus gnybtų poliarumas turi atitikti tinklo poliarumą.
Tarkime, kad generatorius G1 šynose sudaro įtampą UT. Norint prie šių šynų prijungti generatorių G2, elgiamasi šitaip: • pirminis variklis įsuka generatoriaus G2 inkarą iki
nominalaus sukimosi greičio; • pamažu didinama generatoriaus G2 žadinimo srovė, kol
Ea2 = UT; • jeigu generatoriaus G2 poliarumas atitinka šynų poliarumą,
tai voltmetras V1 rodo 0; • priešingu atveju voltmetras rodys ≈2UT; (tada
generatoriaus G2 gnybtus reikia sukeisti vietomis; • kirtikliu Q2 generatorius G2 prijungiamas prie tinklo.
Q1 Q2
E - RaI = U, neig. grįžtamasis
ryšys
Iž I’ž Φ Ce n
Ε U 1/R I
-ka
-RaRaI
Kažkoks koef., įvertinantis inkaro reakcijos išmagnetinantį poveikį žadinimo srovės vienetais
Sumavimas, tam tikras signalas
Priežastinis ryšys tarp Iž ir srauto Φ

38Kadangi Ea2= UT, tai generatorius G2 dirbs T.V. režimu. Tai išplaukia iš generatoriaus įtampų
balanso (pusiausvyros) lygties U=Ea-IaRa;
Čia U=UT ; Ea=Ea2; Ia=Ia2.
Taigi : I URa
Ta
22
= Ea2 −; (1)
Vadinasi, norint apkrauti G2, reikia padidinti jo elektrovarą Ea2. Apkrovai kintant, abiejų generatorių srovės pasiskirsto pagal jų išorines charakteristikas.
Iš čia galima padaryti tokią IŠVADĄ:
Didėjant apkrovai, generatorius, kurio išorinė charakteristika kietesnė, apkraunamas daugiau. Pirmojo generatoriaus srovė apskaičiuojama panašiai kaip ir antrojo:
I URa
Ta
11
= Ea1 −; (2)
Jeigu Ea1 = Ea2, tai iš (1) ir (2) išplaukia II
RR
aa
aa
12
21
= .
Vadinasi, apkrova generatoriuose pasiskirsto atvirkščiai proporcingai suminėms inkaro grandinių varžoms.
Nuosekliojo žadinimo generatoriai lygiagrečiam darbui nejungiami, tokia sistema yra nestabili.
Mišriojo žadinimo generatoriai lygiagrečiai gali dirbti stabiliai, jeigu jų nuosekliojo žadinimo apvijų galai, prijungti prie šepečių, sujungiami trumpai vadinamuoju išlyginamuoju laidu. Tuomet abiejų generatorių nuosekliosios apvijos yra sujungiamos lygiagrečiai ir, stiprėjant vieno generatoriaus apkrovos srovei, abiejų generatorių nuosekliosiose apvijose srovės stiprės vienodai, o apkrova generatoriuose taip pat pasiskirstys vienodai.
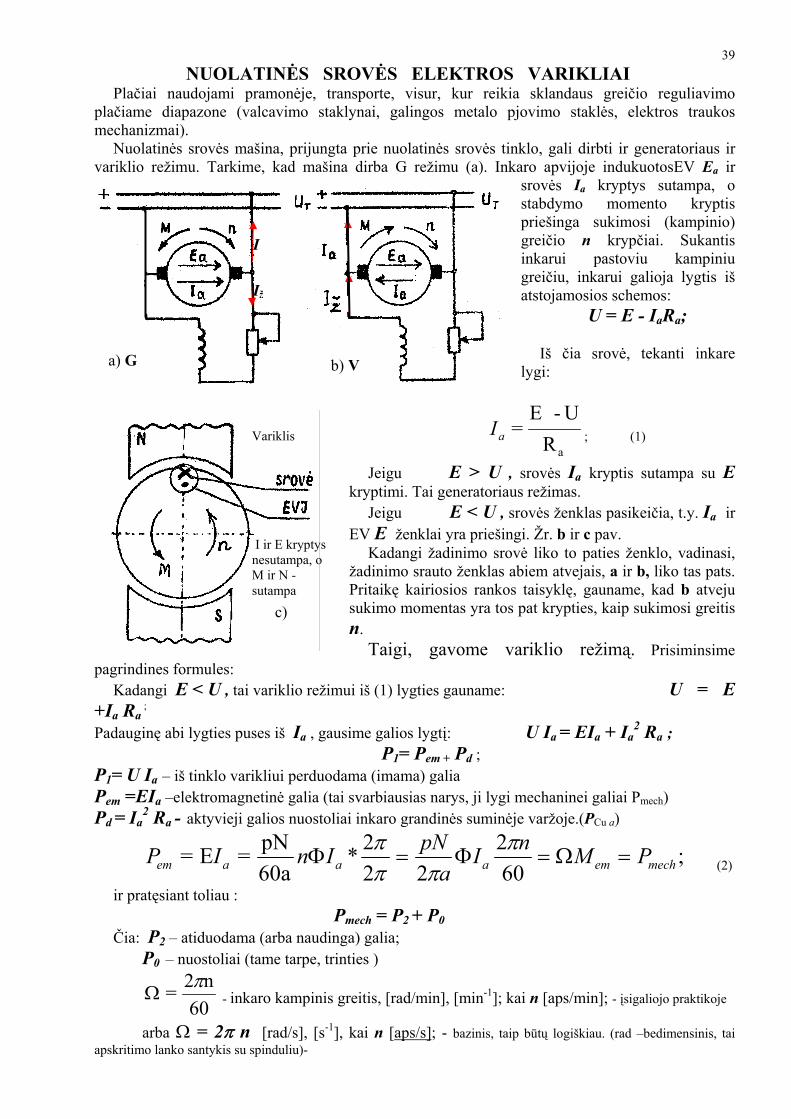
39NUOLATINĖS SROVĖS ELEKTROS VARIKLIAI
Plačiai naudojami pramonėje, transporte, visur, kur reikia sklandaus greičio reguliavimo plačiame diapazone (valcavimo staklynai, galingos metalo pjovimo staklės, elektros traukos mechanizmai).
Nuolatinės srovės mašina, prijungta prie nuolatinės srovės tinklo, gali dirbti ir generatoriaus ir variklio režimu. Tarkime, kad mašina dirba G režimu (a). Inkaro apvijoje indukuotosEV Ea ir
srovės Ia kryptys sutampa, o stabdymo momento kryptis priešinga sukimosi (kampinio) greičio n krypčiai. Sukantis inkarui pastoviu kampiniu greičiu, inkarui galioja lygtis iš atstojamosios schemos:
a) G b) V
I
Iž
U = E - IaRa; Iš čia srovė, tekanti inkare
lygi:
aRU-E
=aI ; (1)
Jeigu E > U , srovės Ia kryptis sutampa su E kryptimi. Tai generatoriaus režimas.
Jeigu E < U , srovės ženklas pasikeičia, t.y. Ia ir EV E ženklai yra priešingi. Žr. b ir c pav.
Kadangi žadinimo srovė liko to paties ženklo, vadinasi, žadinimo srauto ženklas abiem atvejais, a ir b, liko tas pats. Pritaikę kairiosios rankos taisyklę, gauname, kad b atveju sukimo momentas yra tos pat krypties, kaip sukimosi greitis n.
Taigi, gavome variklio režimą. Prisiminsime pagrindines formules:
c)
I ir E kryptys nesutampa, o M ir N - sutampa
Variklis
Kadangi E < U , tai variklio režimui iš (1) lygties gauname: U = E +Ia Ra
;
Padauginę abi lygties puses iš Ia , gausime galios lygtį: U Ia = EIa + Ia2 Ra ;
P1= Pem + Pd ; P1= U Ia – iš tinklo varikliui perduodama (imama) galia Pem =EIa –elektromagnetinė galia (tai svarbiausias narys, ji lygi mechaninei galiai Pmech) Pd = Ia
2 Ra - aktyvieji galios nuostoliai inkaro grandinės suminėje varžoje.(PCu a)
;602
222*
60apN=E= mechemaaaem PMnI
apNInIP =Ω=Φ=Φ
πππ
π (2)
ir pratęsiant toliau : Pmech = P2 + P0
Čia: P2 – atiduodama (arba naudinga) galia; P0 – nuostoliai (tame tarpe, trinties )
60n2= π
Ω - inkaro kampinis greitis, [rad/min], [min-1]; kai n [aps/min]; - įsigaliojo praktikoje
arba Ω = 2π n [rad/s], [s-1], kai n [aps/s]; - bazinis, taip būtų logiškiau. (rad –bedimensinis, tai apskritimo lanko santykis su spinduliu)-

40
čia Mem= M pNa
Ia=2π
Φ (2)
Mem– elektromagnetinis momentas [Nm] N - bendras apvijos laidininkų skaičius Iš (2) išplaukia, kad : elektromagnetinio momento kryptį (ženklą) galima keisti dviem būdais:
keičiant inkaro srovės Ia kryptį arba keičiant Φ (Iž) ženklą.
VARIKLIŲ CHARAKTERISTIKOS
LYGIAGREČIOJO arba SVETIMOJO ŽADINIMO VARIKLIO CH-KOS
-U Jeigu U =const, tai lygiagretaus žadinimo variklio schema yra lygiai
tokia pat, kaip ir svetimo žadinimo. Vienas iš ch-kos reikšmių yra sukimosi greitis n, sukimo momentas M. Sudaromos ch-kos atspindi šių dydžių priklausomybę. Greičio charakteristika : n = f (Ia); U = const, Iž = const; Ieškosime ryšio tarp sukimosi greičio ir EV išraiškos:
E = CE Φ n; (1) E = U - IaRa ; (2)
(1) įrašę į (2), turėsime: CE Φ n = U - IaRa ; Iš čia išreikšime apsisukimus:
n RC
IaE
a= UCEΦ Φ
− .
Gavome greičio charakteristikos analitinę išraišką. Matome, kad inkaro sukimosi greitis yra didėjanti įtampos funkcija ir mažėjanti magnetinio srauto funkcija
Laikysime, kad Φ ≅ const, tai tuomet grafikas bus toks. Analogiška greičio ch-kai yra mechaninė ch-ka.
Mechaninė charakteristika: n = f (M); arba M = f (n) kai U = const, ir Iž = const
Prisiminę, kad M = CM Φ Ia; iš čia išreiškus srovę ΦMCM=aI ; ir tai
įrašius į greičio n išraišką, turėsime:
n RC C
a
E M= U
CEΦ− M
Φ2 ;
Kai magnetinė sistema stipriai įsotinta, didėjant M (Ia), didėja išmagnetinančioji reakcija, tai mažina pagrindinį srautą, todėl didėja n. (nes priklausomybė atvirkštinė). Taigi, stipriai įsotintų lygiagretaus žadinimo variklių mechaninė charakteristika yra kylanti tiesė (2). Pavaros stabilumo sumetimais tai ne
n0
n Dėl išmagnetinančios
ro reakcijos Φ ė
inkamaž ja, greitis didėja
Ia
n0
n Nuo srauto sumažėjimo,kai labai prisotinta
M
natūrali Dirbtinė, su Rp inkaro grandinėje
MN
13
2
Δn
Rp Ia E
Rrp

41visuomet leistina. To galima išvengti, ant pagrindinių polių paklojus nuoseklią žadinimo apviją, vadinamą stabilizuojančiąja, kurios srautas būtų nukreiptas ta pačia kryptimi kaip ir lygiagretaus žadinimo apvijos. O jos vijų skaičius parenkamas nedidelis, (apie10% įprastos nuosekliosios žadinimo apvijos), toks, kad jos srautas kompensuotų pagrindinio srauto sumažėjimą dėl inkaro išmagnetinančios reakcijos poveikio. Tuo atveju pagrindinis srautas lieka pastovus, kai M = var. Charakteristikos (natūraliosios) greičio pokytis nedidelis: Δn = 2 – 8 % .
Kai inkaro grandinėje yra papildoma varža, Rp, mechaninės charakteristikos lygtis pasikeis į:
nR R
C CMa p
E M= U
CEΦ Φ−
+2 ;
Šitokia mechaninė ch-ka vadinama dirbtine. n
M 0
Φ1
Φ2
Φ3 Φ4 Φ1<Φ2<Φ3<Φ4
Jei keisime srautą Φ, t.y. keisime žadinimo srovę Iž, gausime
tokią tiesių šeimą Sukimosi dažnį galima keisti,
keičiant tinklo įtampą U. M
n
Ch-ka M(n):
Sukeitus ašis Mechaninė ch-ka yra pati reikšmingiausia ch-ka. Variklio eksploatacines ypatybes nusako jo darbo charakteristikos.
Tai įvairių darbo rodiklių priklausomybė nuo naudingosios (atiduodamos) galios (t.y.mechaninės galios P2):
P2N
n ;Ia ; M; P1 ;η = f (P2 ), kai U = const,ir Iž =const Nuolatinės srovės mašinų, kaip ir kintamosios srovės
mašinų elektromagnetinis momentas išreiškiamas lygtimi:
M Pem=Ω
;
Savo ruožtu elektromagnetinis momentas susideda iš:
M = M0 + Mv + Md ; Čia: M0 – momentas, kurį lemia mechaniniai, magnetiniai ir papildomieji nuostoliai;
Mv – velenui perduodamas momentas, (naudingasis momentas) apskaičiuojamas pagal formulę:
M Pv = 2
Ω;
P2 – naudingoji galia: P2 = Pem – P0; Ω - inkaro kampinis greitis, [rad/s]; P0 – mechaniniai ir magnetiniai nuostoliai;
M J ddtd =Ω ; - dinaminis momentas.
Čia J – inercijos momentas [kg m2].

42(dėl inercijos momento J dimensijos): J/s2= M; J=M s2 =[N m]*[s2] = [(kg*m)/s2*m s2] = [kg*m2]; nes [N]=[(kg*m)/s2].
Iš tinklo imama galia: P1 = Pem + Pcu a ; čia Pcu a =Ia
2Ra ; Apibendrinant:
Lygiagrečiojo ar svetimo žadinimo variklio mechaninė charakteristika – kieta, greitis mažai tekinta;
Kadangi U = const, tai P1 proporcingas Ia.
η =PP
21
; Tuščiojoje veikoje η = 0, po to, augant P2, η greitai auga, bet prie
didelių apkrovų vėl mažėja, nes smarkiai išauga nuostoliai inkaro grandinėje. Galios koeficiento max būna prie nominalios galios arba prie mažesnės už nominalią
(atiduodamą) galią. Toje vietoje, kur pastovūs nuostoliai susilygina su kintamaisiais, gaunamas max.
NUOSEKLIOJO ŽADINIMO VARIKLIO CH-KOS
Srovė, imama iš tinklo, teka inkaro ir žadinimo apvija
nuosekliai, todėl Ia= Iž .
E
Ia
D1
D2
+ - U
I Jeigu svetimo žadinimo atveju Φ ≅ const, tai nuoseklaus žadinimo atveju, jei magnetolaidis neįsotintas, tarp srauto ir inkaro srovės yra ryšys:
ž
Iž=Ia
Φ = k Iž= k Ia , čia k – yra kintamas dydis, bet galima jį naudoti kaip ryšio koeficientą. Įrašome tokią srauto išraišką į anksčiau turėtą greičio charakteristiką, turėsime tokią analitinę greičio išraišką:
n RC
IkI
RC k
aE
aa
aE
= UC
= UCE EΦ Φ
− − ;
Jeigu nebūtų antro nario, tai greičio priklausomybė
vaizduotų hiperbolę. Įvertinus antrą narį, tai turėsime hiperbolę, pastumtą žemyn.
Kai n=0, turėsime paleidimo srovę. Esant mažoms inkaro srovėms, greitis gali augti į begalybę.
Tokio variklio negalima palikti neapkrauto. Kintant srovei Ia, greitis keičiasi plačiose ribose. Tokia
ch-ka vadinama minkšta. Analogiškai galėtume rasti mechaninę charakteristiką. Iš momento formulės:
M = CM Φ Ia= CM k Ia2
išreiškime srovę ir įstatykime ją į greičio formulę:
;C
CU=n
;CU
=
E
M
M
kCR
kM
kCR
MkCk
n
E
a
E
a
E
−
−I MC ka
M= ;
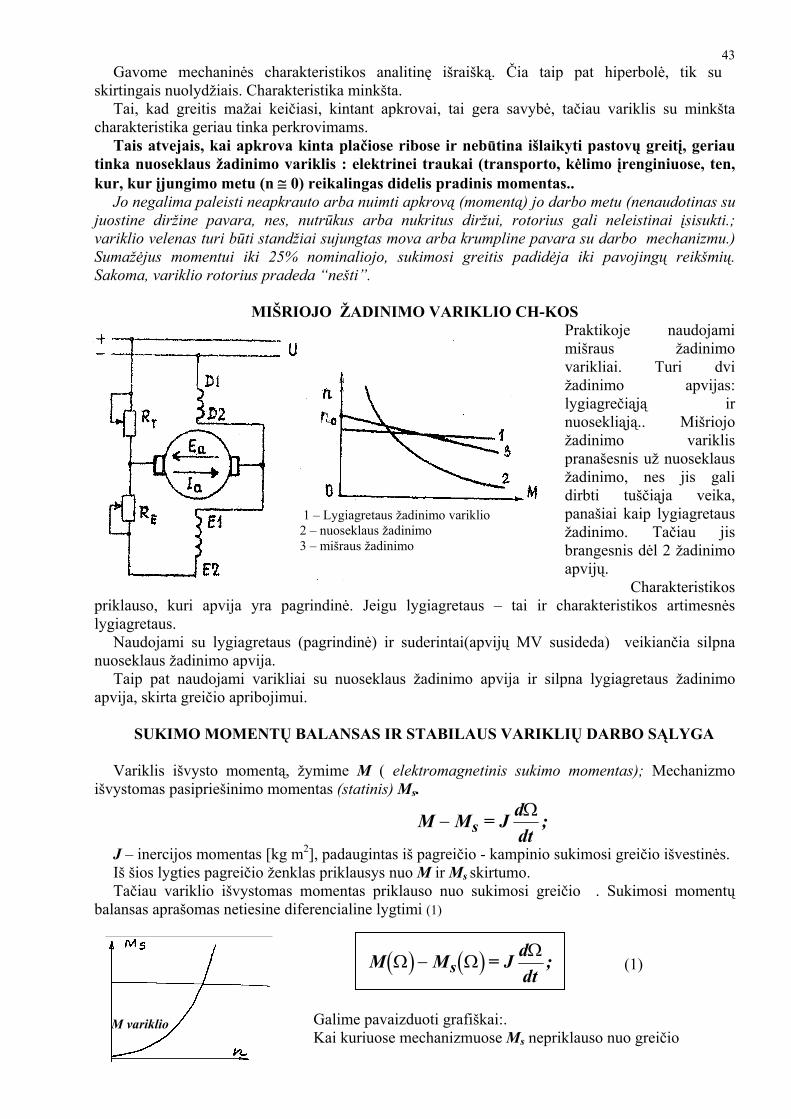
43Gavome mechaninės charakteristikos analitinę išraišką. Čia taip pat hiperbolė, tik su
skirtingais nuolydžiais. Charakteristika minkšta. Tai, kad greitis mažai keičiasi, kintant apkrovai, tai gera savybė, tačiau variklis su minkšta
charakteristika geriau tinka perkrovimams. Tais atvejais, kai apkrova kinta plačiose ribose ir nebūtina išlaikyti pastovų greitį, geriau
tinka nuoseklaus žadinimo variklis : elektrinei traukai (transporto, kėlimo įrenginiuose, ten, kur, kur įjungimo metu (n ≅ 0) reikalingas didelis pradinis momentas..
Jo negalima paleisti neapkrauto arba nuimti apkrovą (momentą) jo darbo metu (nenaudotinas su juostine diržine pavara, nes, nutrūkus arba nukritus diržui, rotorius gali neleistinai įsisukti.; variklio velenas turi būti standžiai sujungtas mova arba krumpline pavara su darbo mechanizmu.) Sumažėjus momentui iki 25% nominaliojo, sukimosi greitis padidėja iki pavojingų reikšmių. Sakoma, variklio rotorius pradeda “nešti”.
MIŠRIOJO ŽADINIMO VARIKLIO CH-KOS
Praktikoje naudojami mišraus žadinimo varikliai. Turi dvi žadinimo apvijas: lygiagrečiąją ir nuosekliąją.. Mišriojo žadinimo variklis pranašesnis už nuoseklaus žadinimo, nes jis gali dirbti tuščiąja veika, panašiai kaip lygiagretaus žadinimo. Tačiau jis brangesnis dėl 2 žadinimo apvijų.
Charakteristikos priklauso, kuri apvija yra pagrindinė. Jeigu lygiagretaus – tai ir charakteristikos artimesnės lygiagretaus.
1 – Lygiagretaus žadinimo variklio 2 – nuoseklaus žadinimo 3 – mišraus žadinimo
Naudojami su lygiagretaus (pagrindinė) ir suderintai(apvijų MV susideda) veikiančia silpna nuoseklaus žadinimo apvija.
Taip pat naudojami varikliai su nuoseklaus žadinimo apvija ir silpna lygiagretaus žadinimo apvija, skirta greičio apribojimui.
SUKIMO MOMENTŲ BALANSAS IR STABILAUS VARIKLIŲ DARBO SĄLYGA
Variklis išvysto momentą, žymime M ( elektromagnetinis sukimo momentas); Mechanizmo
išvystomas pasipriešinimo momentas (statinis) Ms.
M Ms− = J ddtΩ ;
J – inercijos momentas [kg m2], padaugintas iš pagreičio - kampinio sukimosi greičio išvestinės. Iš šios lygties pagreičio ženklas priklausys nuo M ir Ms skirtumo. Tačiau variklio išvystomas momentas priklauso nuo sukimosi greičio . Sukimosi momentų
balansas aprašomas netiesine diferencialine lygtimi (1)
( ) ( )M MsΩ ΩΩ
− = J ddt
;
M variklio
(1)
Galime pavaizduoti grafiškai:. Kai kuriuose mechanizmuose Ms nepriklauso nuo greičio
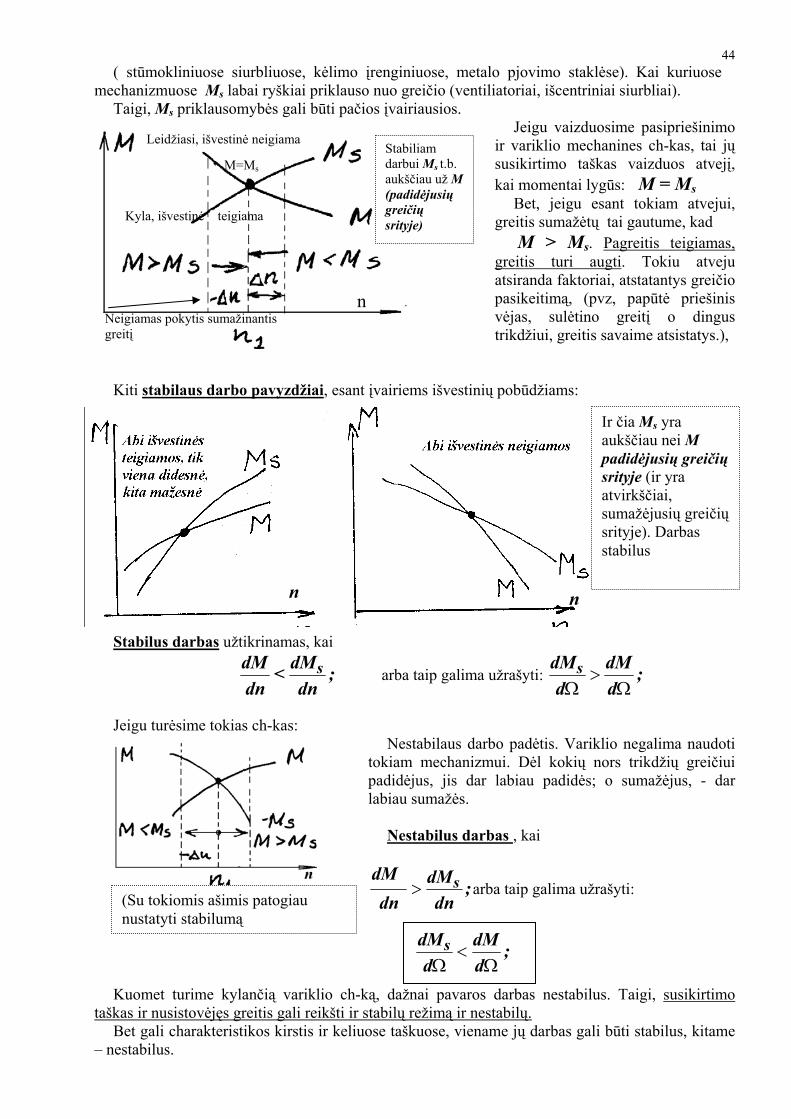
44( stūmokliniuose siurbliuose, kėlimo įrenginiuose, metalo pjovimo staklėse). Kai kuriuose
mechanizmuose Ms labai ryškiai priklauso nuo greičio (ventiliatoriai, išcentriniai siurbliai). Taigi, Ms priklausomybės gali būti pačios įvairiausios.
Jeigu vaizduosime pasipriešinimo ir variklio mechanines ch-kas, tai jų susikirtimo taškas vaizduos atvejį, kai momentai lygūs: M = Ms
n
Leidžiasi, išvestinė neigiama
Kyla, išvestinė teigiama
M=Ms
Neigiamas pokytis sumažinantis greitį
Stabiliam darbui Ms t.b. aukščiau už M (padidėjusių greičių srityje)
Bet, jeigu esant tokiam atvejui, greitis sumažėtų tai gautume, kad
M > Ms. Pagreitis teigiamas, greitis turi augti. Tokiu atveju atsiranda faktoriai, atstatantys greičio pasikeitimą, (pvz, papūtė priešinis vėjas, sulėtino greitį o dingus trikdžiui, greitis savaime atsistatys.),
Kiti stabilaus darbo pavyzdžiai, esant įvairiems išvestinių pobūdžiams:
Stabilus darbas užtikrinamas, kai
Ir čia Ms yra aukščiau nei M padidėjusių greičių srityje (ir yra atvirkščiai, sumažėjusių greičių srityje). Darbas stabilus
n n
dMdn
< dMdn
s ; arba taip galima užrašyti: dMd
dMd
sΩ Ω
> ;
Jeigu turėsime tokias ch-kas:
Nestabilaus darbo padėtis. Variklio negalima naudoti tokiam mechanizmui. Dėl kokių nors trikdžių greičiui padidėjus, jis dar labiau padidės; o sumažėjus, - dar labiau sumažės.
(Su tokiomis ašimis patogiau nustatyti stabilumą
Nestabilus darbas , kai
dMdn
dMdn
s> ;arba taip galima užrašyti:
Kuomet turime kylančią variklio ch-ką, dažnai pavaros darbas nestabilus. Taigi, susikirtimo
taškas ir nusistovėjęs greitis gali reikšti ir stabilų režimą ir nestabilų.
dMd
dMd
sΩ Ω
< ;
Bet gali charakteristikos kirstis ir keliuose taškuose, viename jų darbas gali būti stabilus, kitame – nestabilus.

45Pvz.: lygiagretaus žadinimo variklio mechaninė ch-ka n(M) ir M(n) - natūrali ir jei pasireiškia
išmagnetinanti inkaro reakcija (punktyrinė linija)- mėlyna spalva. Ir apkrovos mechaninė ch-ka M(n) – žalia spalva. (Pvz., stūmoklinių mechanizmų sukimo momentas beveik pastovus, nuo apsisukimų nepriklauso). Ch-kos kertasi dviejuose taškuose, iš kurių taškas A– stabilaus darbo taškas, kitas B – nestabilaus.
n0
n Jeigu pasireiškia išmagnetinanti inkaro reakcijos
Ia
M
M n
A B Ms
Nestabilus taškas Stabilus
taškasnatūrali
reakcija Apkrova
Variklis
Φ↓;n↑
M’ M↑
Tokiu atveju, kad variklio darbas būtų stabilus, daromas variklis su mišriu žadinimu. Norint patogiau nustatyti stabilumą, pasirenkamos ašys M(n), o ne n(M).
VARIKLIŲ PALEIDIMAS Paleidžiant variklius reikia:
• Sukurti pakankamai didelį paleidimo momentą; • Apriboti variklio paleidimo sroves.
Žinome, kad M = CM Φ Ia ; Srovė, tekanti inkaro grandinėje:
I nRa
a= U - E
R= U - C
aEΦ ; (1)
Paleidžiant, kol variklis nesisuka, priešveikiančios elektrovaros E dar nėra, ir, kadangi varža Ra yra palyginti maža, tai paleidimo srovė bus didelė:
I Ip n= URa
>> ;
Tokia didelė paleidimo srovė labai apsunkina komutacijos procesą ir apkrauna variklį termiškai Todėl tiesiog iš tinklo paleidžiami tik mažos galios varikliai (iki 0,5 kW). Didesnės galios variklius paleidžiant reikia:
• Mažinti tinklo įtampą ,arba • Didinti grandinės varžą
Naudojamas reostatinis paleidimas - paleidimo reostatai nuosekliai įjungiami į inkaro grandinę.
Čia draudžiama jungti, bus mažas srautas pradžioje. Variklis pradės suktis su dideliais vargais ir tokia schema negali būti naudojama
Užtikrinant max srautą ši varža paleidime t.b. lygi 0
Rrp
Čia draudžiama jungti, bus mažas srautas pradžioje. Variklis pradės suktis su dideliais vargais ir tokia schema negali būti naudojama
Užtikrinant max srautą ši varža paleidime t.b. lygi 0
Rrp
I
Ia
Iž
E
Tada paleidimo srovė:
( )IR
Ipp
N= URa +
≈ ÷2 3 ;
Pradiniam paleidimo momentui įjungiama didžiausia reostato varža. Paleidimo varžos skaičiavimą, parinkimą nagrinėsite pavarų kurse. Orientaciniai:
Rp >> Ra;
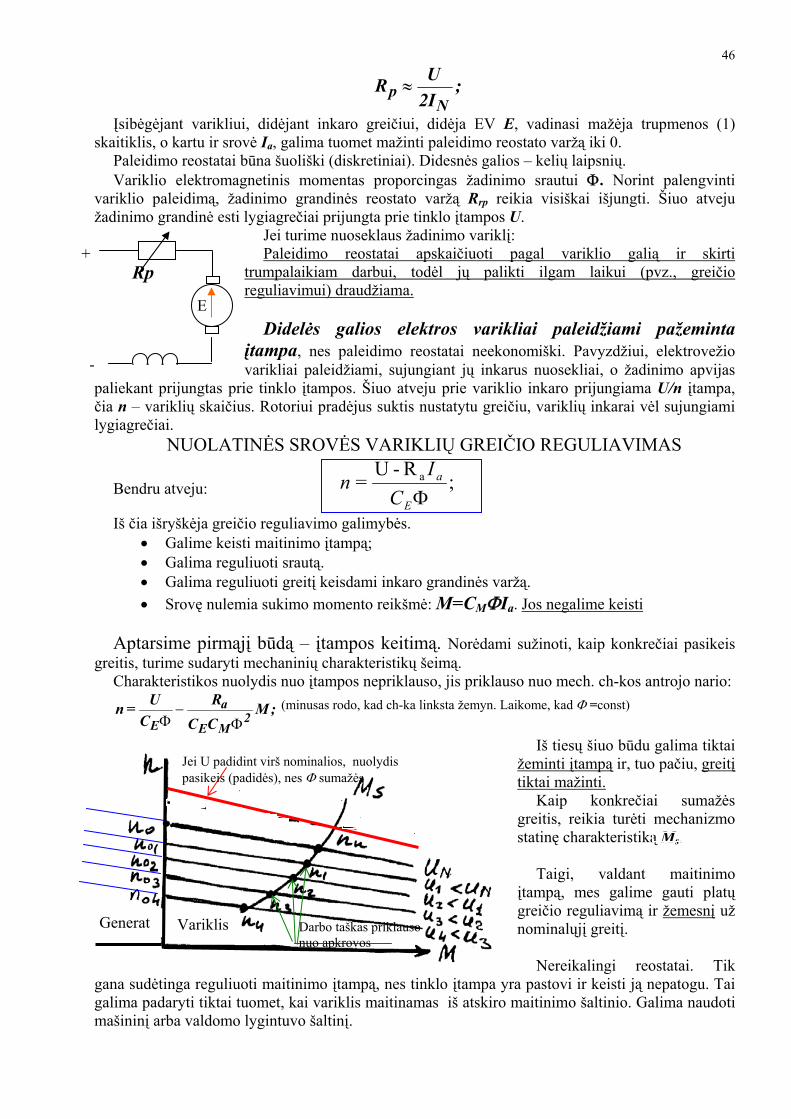
46
Rp ≈U
2IN;
Įsibėgėjant varikliui, didėjant inkaro greičiui, didėja EV E, vadinasi mažėja trupmenos (1) skaitiklis, o kartu ir srovė Ia, galima tuomet mažinti paleidimo reostato varžą iki 0.
Paleidimo reostatai būna šuoliški (diskretiniai). Didesnės galios – kelių laipsnių. Variklio elektromagnetinis momentas proporcingas žadinimo srautui Φ. Norint palengvinti
variklio paleidimą, žadinimo grandinės reostato varžą Rrp reikia visiškai išjungti. Šiuo atveju žadinimo grandinė esti lygiagrečiai prijungta prie tinklo įtampos U.
Jei turime nuoseklaus žadinimo variklį: Paleidimo reostatai apskaičiuoti pagal variklio galią ir skirti
trumpalaikiam darbui, todėl jų palikti ilgam laikui (pvz., greičio reguliavimui) draudžiama.
Didelės galios elektros varikliai paleidžiami pažeminta
įtampa, nes paleidimo reostatai neekonomiški. Pavyzdžiui, elektrovežio varikliai paleidžiami, sujungiant jų inkarus nuosekliai, o žadinimo apvijas
paliekant prijungtas prie tinklo įtampos. Šiuo atveju prie variklio inkaro prijungiama U/n įtampa, čia n – variklių skaičius. Rotoriui pradėjus suktis nustatytu greičiu, variklių inkarai vėl sujungiami lygiagrečiai.
Rp +
-
E
NUOLATINĖS SROVĖS VARIKLIŲ GREIČIO REGULIAVIMAS
Bendru atveju: ;R-U
= a
ΦE
a
CI
n
Iš čia išryškėja greičio reguliavimo galimybės. • Galime keisti maitinimo įtampą; • Galima reguliuoti srautą. • Galima reguliuoti greitį keisdami inkaro grandinės varžą. • Srovę nulemia sukimo momento reikšmė: M=CMΦIa. Jos negalime keisti
Aptarsime pirmąjį būdą – įtampos keitimą. Norėdami sužinoti, kaip konkrečiai pasikeis greitis, turime sudaryti mechaninių charakteristikų šeimą.
Charakteristikos nuolydis nuo įtampos nepriklauso, jis priklauso nuo mech. ch-kos antrojo nario:
n RC C
Ma
E M= U
CEΦ Φ− 2 ; (minusas rodo, kad ch-ka linksta žemyn. Laikome, kad Φ =const)
Iš tiesų šiuo būdu galima tiktai žeminti įtampą ir, tuo pačiu, greitį tiktai mažinti.
Kaip konkrečiai sumažės greitis, reikia turėti mechanizmo statinę charakteristiką Ms.
Taigi, valdant maitinimo
įtampą, mes galime gauti platų greičio reguliavimą ir žemesnį už nominalųjį greitį.
Nereikalingi reostatai. Tik
gana sudėtinga reguliuoti maitinimo įtampą, nes tinklo įtampa yra pastovi ir keisti ją nepatogu. Tai galima padaryti tiktai tuomet, kai variklis maitinamas iš atskiro maitinimo šaltinio. Galima naudoti mašininį arba valdomo lygintuvo šaltinį.
Generat Variklis Darbo taškas priklauso nuo apkrovos
Jei U padidint virš nominalios, nuolydis pasikeis (padidės), nes Φ sumažės
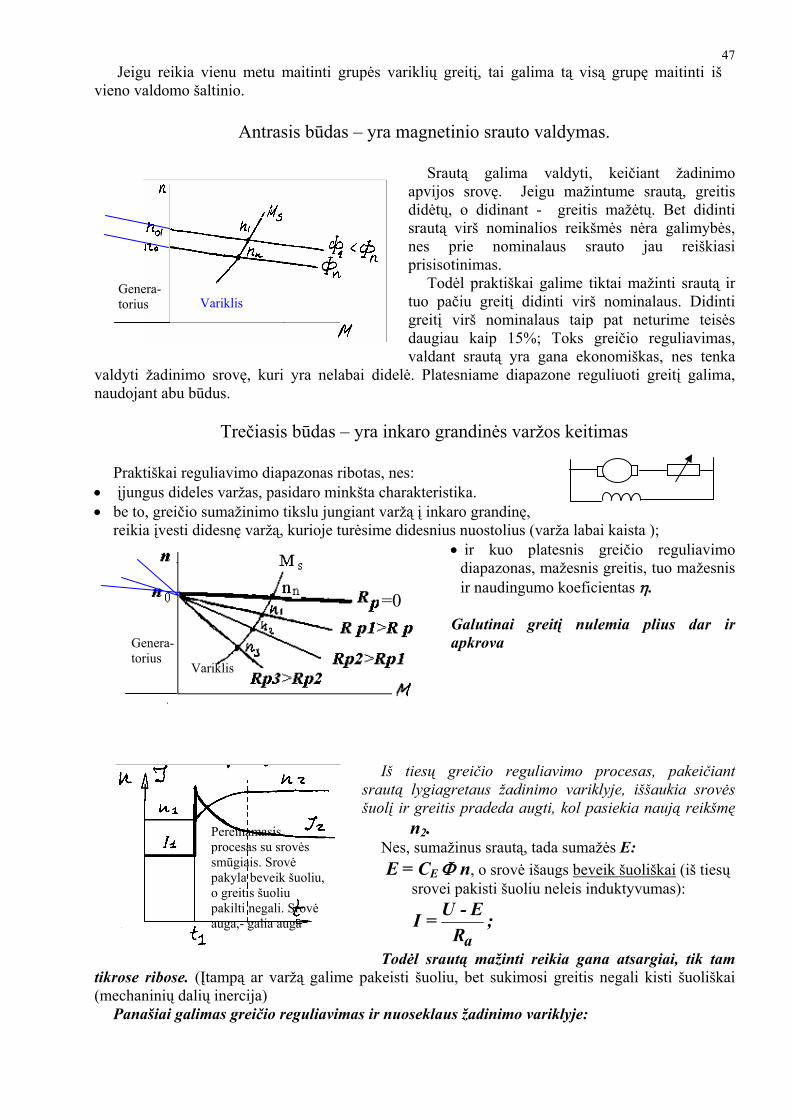
47 Jeigu reikia vienu metu maitinti grupės variklių greitį, tai galima tą visą grupę maitinti iš
vieno valdomo šaltinio.
Antrasis būdas – yra magnetinio srauto valdymas. Srautą galima valdyti, keičiant žadinimo
apvijos srovę. Jeigu mažintume srautą, greitis didėtų, o didinant - greitis mažėtų. Bet didinti srautą virš nominalios reikšmės nėra galimybės, nes prie nominalaus srauto jau reiškiasi prisisotinimas.
Todėl praktiškai galime tiktai mažinti srautą ir tuo pačiu greitį didinti virš nominalaus. Didinti greitį virš nominalaus taip pat neturime teisės daugiau kaip 15%; Toks greičio reguliavimas, valdant srautą yra gana ekonomiškas, nes tenka
valdyti žadinimo srovę, kuri yra nelabai didelė. Platesniame diapazone reguliuoti greitį galima, naudojant abu būdus.
Variklis Genera- torius
Trečiasis būdas – yra inkaro grandinės varžos keitimas
Praktiškai reguliavimo diapazonas ribotas, nes:
• įjungus dideles varžas, pasidaro minkšta charakteristika. • be to, greičio sumažinimo tikslu jungiant varžą į inkaro grandinę,
reikia įvesti didesnę varžą, kurioje turėsime didesnius nuostolius (varža labai kaista ); • ir kuo platesnis greičio reguliavimo
diapazonas, mažesnis greitis, tuo mažesnis ir naudingumo koeficientas η.
Genera-torius
Variklis
=0 Galutinai greitį nulemia plius dar ir apkrova
Iš tiesų greičio reguliavimo procesas, pakeičiant srautą lygiagretaus žadinimo variklyje, iššaukia srovės šuolį ir greitis pradeda augti, kol pasiekia naują reikšmę n2.
Nes, sumažinus srautą, tada sumažės E: E = CE Φ n, o srovė išaugs beveik šuoliškai (iš tiesų
srovei pakisti šuoliu neleis induktyvumas):
I ERa
= U - ;
Todėl srautą mažinti reikia gana atsargiai, tik tam tikrose ribose. (Įtampą ar varžą galime pakeisti šuoliu, bet sukimosi greitis negali kisti šuoliškai (mechaninių dalių inercija)
Pereinamasis procesas su srovės smūgiais. Srovė pakyla beveik šuoliu, o greitis šuoliu pakilti negali. Srovė auga,- galia auga
Panašiai galimas greičio reguliavimas ir nuoseklaus žadinimo variklyje:

481. Galima reguliuoti srautą. Reostatas turės būti didelėms srovėms. Bet kadangi įtampos
kritimas žadinimo apvijoje yra mažas, tai energetiniu požiūriu nesiskirs nuo lygiagretaus žadinimo variklio. Tik čia turės būti galingesni pagal srovę kontaktai ir reostatas.
Reguliuojant šiuo būdu, srovė išsišakoja per žadinimo apviją (ten srovė sumažės, srautas sumažės) ir reostatą, taigi variklio greitis padidės: Φ↓; n↑;
Čia t.b. mažos varžos, bet didelių srovių reostatas
UžN << U U
E
2. Galima šuntuoti inkaro apviją.
Schema atrodys taip: Iž galima tokiu būdu padidinti, bet energija bus naudojama reostatui kaitinti, būdas neekonomiškas.
Taigi, srautas didės, greitis mažės: Φ↑; n↓;
Šuntuojant žadinimo apviją
Šuntuojant inkaro apviją Natūrali mech.
ch-ka
U
Didelės varžos reostatas
E
Antrame kvadrante bus generatorius, bet energija nebus grąžinama į tinklą, energijos pakaks tik nuostoliams reostate padengti.
Nubraižysime mechanines charakteristikas
aptartiems 2 atvejams. Matome, kad šuntuojant žadinimo apviją,
mechaninė ch-ka kyla aukštyn į didesnių greičių zoną, o šuntuojant inkaro apviją, ch-ka leidžiasi žemyn į mažesnių greičių sritį.
ELEKTROS VARIKLIŲ ELEKTRINIS STABDYMAS
Pirmieji elektros mašinų terminai buvo: • “Elektromagnetinė mašina” (apibūdinti varikliui – iš elektros gauni jėgą); • “Magnetoelektrinė mašina” (apibūdinti nuolatinės srovės generatoriui – iš magneto (sukant)
gauni elektrą); 19a. 9-tame dešimtmetyje Symensas pasiūlė nuolatinės srovės generatorių vadinti dinamoelektrine mašina (sutrumpintai – “dinama”) (dina – jėga), o elektros variklį vadinti elektrodinamine mašina. Dabartiniai pavadinimai atsirado po eilės dešimtmečių.
Kaip matysime vėliau, šie pavadinimai kai kur dar išlikę. Kartais kyla reikalas atjungti variklį, kaip galima greičiau sustabdyti (nėra laiko laukti, kol sustos pats); arba gali būti reikalingas tik pristabdymas (troleibusas, pvz., arba krovinį reikia nuleisti ribotu greičiu).
Variklį galima stabdyti mechaniniais stabdžiais arba elektromagnetiniu momentu. Pastarasis stabdymas vadinamas elektriniu. Taigi, kad greitis mažėtų, reikia išvystyti stabdantį momentą, priešingą sukimo momentui.

49Elektrinio stabdymo būdai: • dinaminis stabdymas; • priešjungimo stabdymas; • generatorinis (rekuperacinis, regeneracinis) stabdymas.
Aptarsime kiekvieną atskirai.
Dinaminis stabdymas
Paremtas tuo, kad variklio inkaro apvija atjungiama nuo tinklo ir sujungiama per išorinę
dinaminio stabdymo (apkrovos) varžą Rap. Žadinimo apvija lieka prijungta prie tinklo. Variklis tampa autonominiu generatoriumi. Stabdant dinaminiu būdu, elektros pavaroje sukaupta kinetinė energija (besisukančių masių mechaninė energija) verčiama elektros energija., kuri išsisklaido varžoje Rap.
Inkaro grandinėje indukuotos evj kryptis lieka ta pati, kaip ir dirbant variklio režimu. Ar kelio nuolydis, ar iš inercijos sukaupta kinetinė energija turi būti pakeista ir kažkokiu būdu
suvartota. Šitokio stabdymo metu inkaro srovė keičia kryptį kartu su elektromagnetinio momento kryptimi. Teoriškai stabdymo intensyvumą galima reguliuoti, keičiant žadinimo srovę. (didinti reikėtų, bet praktiškai to neįmanoma padaryti, tai tik teorinės galimybės. Sudegintume apviją ir ne ką tepadidintume).
Pradėjus stabdymą, variklis vis dar suksis ir toliau. Inkaro grandinėje indukuosis EV, pratekės srovė, variklis dirbs kaip generatorius, atsiras pasipriešinimo momentas. Kaip mažės greitis, pavaizduosime grafiškai : jeigu greitis mažės, mažės EV E ir srovė, todėl stabdymo ch-ka
Rap
U
Ia
Jei nebus apkrovos, nebus ir stabdančio momento. O jei užtrumpintume, gautume pasipriešinimo momentą, bet sudegintume, didelės srovės tekėtų
Rap↓;Ia↑; Mst↑; bet vis tiek , jei n→0, Mst→0
E
Iž
V bus ten kur M ir n ženklai sutampa, 1,3 kvadrantuose
G
G bus ten, kur M ir n ženklai nesutampa, 2,4 kvadrantuose
V Rap - max
Sumažinome Rap
Kai n=0,ir Mstabd=0, nebestabdo
Jei dar sumažinsime Rap, tai Mst ↑, bet tekės labai didelė srovė
Mst1 Mst3
-n
n
Mst2

50vaizduojama tiese, einančia per koordinačių pradžią. Stabdymo varža turi būti parenkama tokia, kad srovė nebūtų perdaug didelė, neviršytų (2 ÷ 3) IN.
Stabdymo pradžioje, kol greitis didelis, stabdymo momentas didesnis. Mažėjant greičiui, momentas mažėja, artėja prie 0, bet visai nesustabdo
(Pvz., troleibusas vis tiek riedės toliau, o kad visai sustabdyti, reikės dar ir mechaninių stabdžių. Čia veikia aktyvus sukimo momentas (pakalnė, ar į kalną) ir pasyvus – inercija. Jei lygioje vietoje, troleibusas sustos, o jei į kalną kyla, tai pradės riedėti atgal, o jei nuo kalno leidžiasi, tai gal tik pristabdys, ribotu greičiu riedės žemyn. Pilnam sustabdymui reikės kitų būdų (mechaninių stabdžių).
Apibendrinant: dinaminio stabdymo metu: • variklis tampa svetimo žadinimo. Srautas Φ = const. • Msuk ≡ Ia(inkaro, t.y. stabdymo) ≡ E ≡ n (kai Φ = const.) • Kuo didesnis n, tuo didesnis stabdymo momentas (stabdymas): Mst ≡ n; • Mst = Cst n; (čia Cst –stabdymo konstanta, priklausanti nuo Φ, Rap; CE; CM). Tai tiesės,
einančios per koordinačių pradžią lygtis. (Dinaminio stabdymo ch-ka – tiesė, einanti per koordinačių pradžią;)
• Taigi, mažų greičių srityje stabdymas mažai efektyvus. Todėl efektyvumo padidinimui reikia keisti (mažinti) apkrovos varžos Rap dydį (bet ne iki trumpojo jungimo, nes sudegintume, didelės srovės tekėtų).
Stabdomi dinaminiu būdu, nuoseklaus žadinimo varikliai neturi išsimagnetinti, todėl žadinimo apviją reikia perjungti taip, kad, pereinant prie dinaminio stabdymo, srovės kryptis joje nesikeistų.
Realizuojama tam skirta schema (žr. pav.)
Stabdymas priešjungimu (priešpriešiniu jungimu)
Šiuo būdu stabdoma tada, kai rotoriaus sukimosi greitį reikia sumažinti iki 0. Šiuo atveju keičiama inkaro apvijos srovės kryptis (žadinimo kryptis neturi pasikeisti, todėl tai paprasčiau realizuoti su svetimo žadinimo varikliu). Kodėl? Todėl, kad jeigu pakeistume poliarumą inkaro grandinės kartu su žadinimu, tai gautume tos pačios krypties sukimo momentą. Elektromagnetinis momentas keičia ženklą. Paprastai toks stabdymo būdas naudojamas prieš pakeičiant variklio sukimosi kryptį (prieš reversuojant).
Variklis taip prijungiamas prie maitinimo šaltinio, kad būtų išvystytas priešingos krypties sukimosi momentas, o charakteristika atsidurtų II kvadrante.
Norint pakeisti momento kryptį, reikia pakeisti inkaro prijungimo kryptį, atitinkamai sukeičiant inkaro apvijos galus
Rpr + -
(-) (+)
E
U

51Jeigu atjungtume žadinimo apviją, nors ir trumpam, tai gautume nepageidaujamą greičio
srovės padidėjimą, nes būtų didelis induktyvumas L (inkaro apvijos induktyvumas mažesnis už žadinimo apvijos induktyvumą), indukuojama didelė E , daug didesnė už nominalią darbo įtampą. Tai pavojinga. Taigi, komutacijos sąlygos lengviau įvykdomos, perjungiant inkaro grandinę.
Jeigu normaliai dirbant I = U - ERa
; o po sukeitimo (U+E) , tada priešjungimo srovę
reikės riboti, įjungiant inkaro grandinėje papildomą varžą Rpr.
IRpr
pr= U + E
Ra +;
Prie schemos prijungus priešingo poliarumo įtampą, pakinta inkaro grandinės srovės kryptis ir
variklio momentas tampa stabdymo momentu. Stabdymas priešiniu jungimu veikia tol, kol elektromagnetinio momento kryptis yra priešinga inkaro kampinio greičio krypčiai. Dirbant šiuo režimu, įtampos ir evj E kryptys sutampa. Iš paskutinės formulės matyti: srovei iki leistinos reikšmės riboti į inkaro grandinę reikia įvesti didesnę varžą negu paleidžiant variklį.
Stabdymo priešjungimu esmė: esant tam pačiam apsisukimo greičiui, reikia peršokti į II
kvadrantą (su priešingu momento ženklu), kaip? • Pakeičiant inkaro prijungimo poliarumą ir įjungiant Rpr priešjungimo srovės
sumažinimui. • Rp parenkama tokio dydžio, kad apribotume sroves, kiek didesnes už IN,(iki 8 IN).
Priešjungimo stabdymo metu bus naudojama energija iš tinklo ir plius naudojama mechaninė stabdymo energija, ir viskas bus paverčiama šiluma.

52
Generatorinis (rekuperatorinis) stabdymas
Generatorinis stabdymas yra ekonomiškiausias, nes dalį stabdymui panaudotos energijos galima grąžinti į tinklą. Tarkime, elektrovežiui (ar kitai transporto priemonei) riedant į pakalnę, jo ratų sukimosi greitis vis didėja, o variklio elektrovara E viršija tinklo įtampą, ir srovės kryptis keičia ženklą ; tas pats vyksta, nuleidžiant krovinį.
Tik kai greitis pasidaro didesnis už tuščiosios veikos greitį, išvystomas stabdymas. Elektros mašina ima dirbti generatoriaus režimu, o elektromagnetinio momento ženklas tampa
priešingos sukimosi greičio ženklui – rotorius stabdomas. Mechaninė energija bus paverčiama elektros energija. Stabdymo momentą galima reguliuoti žadinimo srove. Generatorinis stabdymas galimas tik esant lygiagrečiojo žadinimo apvijai. Nuosekliojo žadinimo mašina generatorinio stabdymo metu dirba nestabiliai.
Galima naudoti ribotame diapazone ( kai greitis >n0). Tas diapazonas gali būti išplėstas, valdant
plačiau maitinimo įtampą. Tada atsiranda didesnės galimybės išnaudoti generatorinį stabdymą, išsiplečia valdymo diapazonas. Generatorinis stabdymas praktikuojamas transporto priemonėse.
Taii atliekama, stabdymo metu perjungiant kelis variklius, dirbančius lygiagrečiai, į nuoseklų
jungimą, tada gaunasi tas pats efektas, lyg sumažintume įtampą tiek kartų, kiek įjungta variklių nuosekliai:
53ELEKTROS MAŠINŲ MAGNETINĖ SISTEMA
NUOLATINĖS SROVĖS MAŠINŲ MAGNETINĖ GRANDINĖ ir jos skaičiavimas
Visų elektros mašinų pagrindinį (darbo) magnetinį srautą kuria statoriaus arba rotoriaus apvijų
magnetovaros jėgos. Pagrindinio magnetinio srauto jėgų linijos užsidaro per mašinos dalis, sudarančias jos magnetinę grandinę. Magnetinės grandinės dalys yra: stovas, polių šerdys (įskaitant ir polių antgalius), inkaro šerdis ir oro tarpas tarp poliaus antgalių ir inkaro. Nesvarbu, kiek polių (2, 4, ar 6) yra NSM-je, visais atvejais magnetinė sistema yra išsišakojusi simetriška magnetinė grandinė. Kiekvieno poliaus magnetinis srautas pasiskirsto į dvi lygias dalis ir praeina per du gretimus polius.
Rotacinės elektros mašinos skiriamos į ryškiapoles ir neryškiapoles. Ryškiapolių elektros mašinų grupei priklauso:
• nuolatinės srovės elektros mašinos, • ryškiapolės sinchroninės mašinos ir • kai kurios kintamosios srovės kolektorinės mašinos.
Neryškiapolių elektros mašinų grupei priklauso: • didelė dalis asinchroninių mašinų; • neryškiapolės sinchroninės mašinos ir • dalis kintamosios srovės kolektorinių mašinų.
Žadinimo srovė gali būti; o nuolatinė (nuolatinės srovės mašinos ir sinchroninės mašinos) arba o kintamoji (asinchroninės mašinos ir kintamosios srovės kolektorinės mašinos).
Ir nuolatinės ir kintamosios srovės mašinų magnetinės grandinės apskaičiuojamos panašiai: ir vienu ir kitu atveju naudojamasi pilnosios srovės dėsniu.
Dirbant elektros mašinai tuščiosios veikos (t.v.) režimu, pagrindinis magnetinis srautas pasiskirsto simetriškai poliaus geometrinės ašies atžvilgiu, taip pat vienodai po visais poliais. Todėl pakanka ištirti dviejų polių magnetinę grandinę.
Magnetinės grandinės skaičiavimo tikslas – nustatyti vienos polių poros ryšį tarp
magnetinio srauto Φ ir magnetovaros F: Vieno poliaus srautas Φ = f (Fž ) vieno poliaus MV, jei nesusitarta kitaip. Magnetinio srauto dimensija [Wb], o CGS sistemoje [maksvelai].
(Čia srautas 1-am poliui. Polių gali būti daug, 10-14, tada reikėtų dauginti, bet taip neoperuojama; svarbiausia žinoti 1 poliaus MV, bet galima traktuoti įvairiai, kaip susitarsime).
O jau iš MV galima apskaičiuoti žadinimo apvijos vijų skaičų w ar Iž, reikalingą pageidaujamam srautui sukurti. .
Magnetinė grandinė skaičiuojama, vadovaujantis pilnosios srovės dėsniu:
čia H – magnetinio lauko stipris [A/m].Čia dešinėje lygybės pusėje vietoje vijų skaičiaus yra sumos ženklas, tai “visos srovės”, jos gal nevienodos. Kai per daug vijų teka ta pati srovė, tai rašomas vijų skaičius w.
Komentaras: H geriau tiktų pavadinti magnetinančios jėgos intensyvumu. Jis priklauso nuo
vijų skaičiaus, tekančios srovės stiprio ir nuo vidutinės magnetinės linijos ilgio l, o nuo medžiagos nepriklauso. Vadinasi, jei tas ilgis bus toks pat, tai tiek ore, tiek ir feromagnetinėje medžiagoje ta pati ritė, tekant tai pačiai srovei, sukurs to paties didumo H. Tačiau B feromagnetinėje medžiagoje bus tiek kartų didesnė, kiek feromagnetinės medžiagos μa (magnetinė skvarba) didesnė už oro: μ0
= 4π* 10-7 [H/m]. Praktikoje naudojamasi santykime magnetine skvarba μr = μa / μ0, kuri parodo, kiek kartų įvairių medžiagų μa yra didesnė ar mažesnė už tuštumos. μr pateikiama žinynuose, ir
žinant μ0, galima apskaičiuoti medžiagos μa. l
Iw=H ; tai yra magnetovara, reikalinga
Hdl = i∑∫

54magnetiniam srautui pravaryti ne per visą uždarą grandinę, o per tos grandinės ilgio vienetą. Pilnosios srovės dėsnis: ∑Hl=∑Iw; galioja vienalytėms magnetinėms grandinėms) (magnetinės grandinės kontūro magnetinių įtampų algebrinė suma lygi magnetovarų algebrinei sumai). Sandauga Hl dar vadinama magnetine įtampa F = Hl [A]. Čia H – magnetinio lauko stipris. jis priklauso nuo B = Φ / S ; ir , kai suskaičiuojami visų magnetinės grandinės dalių B (ir oro tarpe taip pat), iš įmagnetinimo kreivių randamas H . (Tik oro tarpe ne iš kreivės, o pagal formulę, esančią žemiau) l- magnetinės grandinės dalies ilgis.
Magnetinio lauko stipris oro tarpe randamas iš formulės: BBδ = μ0 Hδ ; Iš čia Hδδ
μ=
B
0,=
0.8*10 B6δ ; o Bδ rasime iš formulės Bδ B = Φ /Sδ, jeigu turime srautą Φ ). Įstatome į pilnosios
srovės dėsnio formulę ir randame magnetovarą (magnetinę įtampą) Fž (IN).
Paveiksle parodyta nuolatinės srovės keturpolės ryškiapolės elektros mašinos magnetinė
grandinė.
l N
S
+ +
bj
lm
N S lm lm
++
lz
lz
δ δ
δ δ
la
la
lj
lm
lm lm
bm
ba
Čia : lj – statoriaus jungo magnetinės linijos vidutinis ilgis; la – rotoriaus inkaro (jungo) magnetinės linijos vidutinis ilgis; lm – poliaus magnetinės linijos vidutinis ilgis;
lz – dantų sluoksnio magnetinės linijos vidutinis ilgis; δ – oro tarpo ilgis; bm – poliaus plotis; ba – inkaro jungo aukštis,bj – statoriaus jungo aukštis

55Taikant pilnosios srovės dėsnį, dešinėje formulės pusėje sumuotume dviejų polių žadinimo apvijų abiejų pusių sroves (polių poros)
Bendruoju atveju magnetinio lauko stipris H kiekviename taške yra skirtingas. Uždavinio supaprastinimui visoje magnetinėje grandinėje išskiriame atskiras dalis, kuriose galima laikyti magnetinio lauko stiprį vienodu.
Išskirsime: • oro tarpą δ , kurių yra 2 magnetinio lauko grandinėje; • inkaro dantų sluoksnį lz, kurių yra 2 magnetinio lauko grandinėje • inkaro jungu praeinančią grandinę la; • poliaus magnetinės linijos vidutinį ilgį lm; • statoriaus korpuso (jungo) magnetinės linijos vidutinį ilgį lj;
Išskaidę magnetinę grandinę į atskiras dalis, galime integralą užrašyti baigtine suma (kitaip tariant, pritaikome uždarajai magnetinei grandinei II Kirchhofo dėsnį – magnetinių įtampų pusiausvyros lygtį): Fž = Fδ + Fz +Fa + Fm +Fj ;
Čia Fž - žadinimo apvijos magnetovara; Fδ - oro tarpo magnetinė įtampa; Fz –dantų sluoksnio magnetinė įtampa; Fa- inkaro magnetinė įtampa; Fm- polių ir Fj- statoriaus jungo magnetinės įtampos.
Arba: wžiž = Fž = ΣHl = Hδ 2δ + Hz2lz + Ha la + Hm 2lm +Hj lj ; (1) Šios sandaugos ir yra ne kas kita, kaip magnetinės įtampos tam tikrose dalyse. (Paprastai susitartas rezultatas yra 1 poliaus srautas nuo 2 polių MV, o jei norėtume 1 poliaus
srautą rasti nuo 1 poliaus MV, rezultatą, t.y. magnetovarą dalintume pusiau. Skaičiavimo eiga: 1.Turi būti žinoma magnetinės grandinės (MG) matmenys ir medžiagos. Toliau, žinodami,
koks yra srautas Φ, galime paskaičiuoti magnetovarą (magnetinę įtampą) Fž . (iš kur žinosime srautą Φ ? O gi, pvz, projektuojame mašiną 220V, n=const tai iš ryšio tarp E=CEΦn, )
2. Atvirkščiu atveju : (duota MG matmenys, medžiaga, MV, reikia rastiΦ ). (Šiaip jau neįmanoma, turint MV, rasti srautą, nes iš anksto nežinome Rm). Tada naudojamas priartėjimo metodas: užsiduodame srautą ir skaičiuojame MV. Jeigu nepataikysime, tai pasirenkame mažesnį ir t.t.
Čia taikomas tiesioginio uždavinio sprendimo būdas: spėtinai
pasirinkus 5 – 6 ieškomojo Φ vertes, apskaičiuojamos MV. Pirmajai srauto reikšmei patogu užsiduoti galimai didžiausią Φmax. Tam laikoma, kad 2 oro tarpų magnetinė įtampa 2Hδlδ >> negu likusiose dalyse, taigi, ≅MV, tada
Φmax ;= = =INR
IN IN
m lS
lSaμ μδ2
0
nes orui μr = 1;(μa=μ0).
Dimensija magnetinės varžos Rm [A/Wb]. S – magnetolaidžio skerspjūvis.
Fm
Φ
Φmax
(IN)
Φ
Fm
Gaunama paklaida. Tikrumoje Φ turi būti mažesnis. Todėl parinksime toliau Φ <Φmax. Skaičiavimą nutrauksime, kai gausime MV reikšmę, mažesnę už sąlygoje duotą. Taip gaunama amperveberinė ch-ka tiriamai grandinei :
Pagal sąlygoje duotą MV – Fm iš kreivės atskaitomas ieškomas Φ. Parenkant magnetinę grandinę projektuojamai mašinai, naudojami empiriniai duomenys. Iš
daugelio skaičiavimų parenkamas optimaliausias variantas. MV vertės atskirose MG dalyse skirtingos ir priklauso nuo tų dalių magnetinės varžos.
Didžiausią magnetinę varžą Rm turi oro tarpas. Todėl didžioji suminės MV Fž dalis sueikvojama oro tarpo magnetinei varžai įveikti. Kitų plieninių MG dalių magnetinės varžos Rm priklauso nuo

56plieno magnetinio prisotinimo laipsnio. Labiausiai magnetiškai prisotinti yra dantys (nes grioveliai sumažina plotą)), todėl jų Rm didesnė, negu kitų plieninių magnetinės grandinės dalių varža.
Polių poros (dviejų polių) žadinimo apvijos paskaičiuota MV Fž nulemia 0,5 poliaus srauto? žadinimo apvijos 2 ričių? vijų skaičių.( ką tas skaičiuojamas kontūras apima) (abejoju, pasiaiškinti, kur poliaus srautas, kaip ritės, ar pusrites)?
(wž = Fž / 2iž, (:iš 2, nes čia Fž - 2 ričių (1 ritės/2) (ar 4 pusričių?) MV,) čia iž – srovės,
tekančios žadinimo apvija,stipris, A; žadinimo srovė imama 1% Iav.)
1. Oro tarpo magnetinė įtampa (Fδ = Hδ 2δ) (skaičiuojame plotams, su tūriu būtų surišta sukaupta energija)
Kiekviena el. mašina projektuojama fiksuotai elektrovarai Ea=CE n Φ; čia Φ - oro tarpo pagrindinis magnetinis srautas: Φ = ατ lδ Bδ ; čia lδ - skaičiuojamasis mašinos ilgis; τ - poliaus žingsnis; α - poliaus koeficientas (α=b/τ) ; kur b – poliaus plotis BBδ - oro tarpo magnetinio srauto tankio maksimali reikšmė.
Sudėtingiausias magnetinio lauko pobūdis yra oro tarpe, kuriam tenka iki 60-80% magnetovaros. Turime srautą Φ, skaičiuosime pagal formulę magnetinio srauto tankį:
B Wbm
δδ
=S
= [T]Φ [ ][ ]2
;
Surasime skerspjūvio plotą, kuriuo praeina magnetinės linijos per oro tarpą.
Čia bδ - vidutinis oro tarpo plotis, įvertinantis lauko išsiplėtimą; bp- poliaus antgalio plotis bδ = bp + δ ; (tai empyrika, 2 po 0,5δ)
Tada plotas Sδ = bδ Lδ , kur ;2
'L= m aL
L+
δ Čia Lδ - oro tarpo
ilgis ašine (išilgine) kryptimi; Lm -poliaus ilgis; La’ – inkaro ilgis, atmetus aušinimo kanalą Po to, jau turėdami BBδ , ir prisiminę formulę Bδ B = μ0 Hδ ; kur μ0 = 4π 10-7 [H/m],
paskaičiuojame m. lauko stiprį: H B Bδδ
δμ= = 0,8* 106
0;
Apskaičiavus magnetinio lauko stiprį Hδ, galima ieškoti ir magnetinės įtampos:
Fδ = Hδ 2δ’; Čia δ’ = δ kδ , kur kδ - Karterio koeficientas, įvertinantis
inkaro magnetolaidžio dantytumą (dėl ko oro tarpo BBδ kreivė yra banguota
kδ > 1 (tas pats efektas, tarytum didesnis oro tarpas)

57Konkrečios reikšmės skaičiuojamos empiriškai. Jeigu griovelių nebūtų, tai oro tarpo BBδ būtų lygi BmaxB . Reali oro tarpo BBδ < Bmax. Kartais būna dantytas ir statoriaus magnetolaidis. Formulės – žinynuose. Skaičiuojame plotams, su tūriu būtų surišta sukaupta energija!
2. Dantų sluoksnio magnetinė įtampa Fz
Skaičiuojama vienam dančiui trims dantų zonos skerspjūviams. (Ar paskui dauginama iš dantų skaičiaus? Ne.) Didelės galios mašinų grioveliai būna stačiakampiai, o dantys trapeciniai. Dantys paprastai būna stipriai įsotinti. Jeigu danties maksimalus srauto tankis >1,8T, tai dalis magnetinio srauto “nebesutelpa” dantyje ir dalis
magnetinio srauto eina ir grioveliu(Φg).
τz
bz1
bz2
bz3
bg
lz lz
Magnetinio srauto tankis dantyje bus skirtingas. Reikia žinoti, koks srautas praeina dantimi, kad paskui skaičiuoti magnetinio srauto tankį. O sužinome taip: jei danties žingsnis τz , tai Φz = Bδ τ Lδ ;
Čia Lδ - oro tarpo ilgis ašine (išilgine kryptimi) Toliau galima skaičiuoti magnetinio srauto tankį dantyje. Galimi 2 atvejai:
2.1 Magnetinio srauto tankis BBz <1,8 T (nedidelis) (tai visas srautas praeina dantimi, dantis nėra prisotintas). Skaičiuojama taip. Srautas Φz jau žinomas, BBz skaičiuojamas trijuose taškuose:
Bzz
z1
1
= =ΦS b L k
z
z a uzp1
Φ'
; Analogiškai randami BBz2 ir Bz3B
čia kužp<1; įvertina tik gryną danties geležį, atmetus izoliaciją tarp plokštelių Toliau ieškosime magnetinio srauto stiprio. Tam privalome
žinoti ryšį tarp magnetinio lauko stiprio ir magnetinio srauto tankio tai medžiagai, iš kurios inkaras pagamintas. Gali būti duota, sakysime, grafiškai. Po to skaičiuojamas vidutinis magnetinio lauko stipris -
apytikriai pagal Simpsono formulę:
HH H H
zz z z
vid=
+ +1 2
46
;3 Toliau surandama
dantų sluoksnio magnetinė įtampa: Fz = Hz vid 2lz; kur lz – danties aukštis (griovelio gylis).
2.2 Jei magnetinio srauto tankis BBz >1,8 T,
bz 2 bg
tai reikia atsižvelgti į srauto dalį, atsišakojančią grioveliu Φg.
Iš tikrųjų srautas susideda : Φz=Φz’+Φg; (srauto dantimi ir grioveliu) Visus narius padaliname iš skerspjūvio ploto Sz i (i – tajam skerspjūviui)

58
Φ Φ Φz
z z
g
zS S Si i
= z'+
i
; Paskutinį narį padauginame iš santykio Sg/Sg(griovelio)
Φ Φ Φz
z z
g
z
g
gS S SSS
i i i
= z'+ ;
ir gauname B: iz
ggi S
SBB +'
zz B=i ;
SS
bb
g
z
g
zi i
= = kg ;
kg – griovelio pločio koeficientas; Tada gausime tokią išraišką: BBzi =Bzi
’+ Bg kg Čia BBg= Bδ (oro)
Toliau mus domina magnetinio lauko stipris. Jau žinome, kad magnetinio srauto tankis B surištas su magnetinio lauko stipriu H per medžiagos įmagnetinimo kreivę.
O magnetinio srauto tankis oro tarpe Bδ yra apytikriai tiesiškai proporcingas H (ore –
neferomagnetinėje medžiagoje) Skaičiavimo supaprastinimui laikoma, kad pjūvyje “i” visų griovelio taškų ir visų danties taškų magnetinio lauko stipris yra toks pat
Hzi ≅ Hgi ; Tuomet skaičiuotinas BBzi(Hz) = Bzi
’(Hz) +μ0 Hz kg ; Kiekvienai griovelio pločio koeficiento reikšmei galime sudaryti grafikus B(H): Dantų sluoksnio H apskaičiuojamas taip:
Danties aukštis
padalijamas į n elementarių
intervalų. Kiekvienam
dalijimo taškui apskaičiuojamas
danties koeficientas kg, Iš kreivių šeimos pasirenkame tą kreivę, kuri
atitinka apskaičiuotąjį
kg.
Jeigu nebūtume
įvertinę atsišakojančio
lauko, tai gautume didesnę H reikšmę.

59 Iš tikrųjų H bus mažesnė.
3. Inkaro jungo magnetinė įtampa (Fa= Hala)
Vieno poliaus pagrindinis magnetinis srautas šakojasi į dvi dalis: ΦΦ
a =2
;
BL k
aa a
a=
S =
ba a uzp
Φ Φ' ;
D
la
ba
čia ba -inkaro jungo aukštis; La
’ – inkaro matmuo išilgine mašinos ašimi , atmetus aušinimo kanalą; S = La
’ ba – inkaro jungo skerspjūvio plotas; kužp – magnetolaidžio užpildymo koeficientas,(kFe) (Jei masyvus, kužp= 1, jei tarpeliai su izoliacija, kužp < 1) Iš inkaro plieno įmagnetinimo kreivės BBa=f(Ha) nustatome magnetinio lauko stiprį Ha.
Inkaro jungo (ilgyje) magnetinė įtampa: Fa =Ha la
Čia ( )lD l b
paz a≈
− −22
π; yra inkaro junge praeinančios grandinės ilgis
Vardiklis 2p – polių skaičius (1 polių pora)
4. Magnetinės grandinės įtampa poliuose (Fm= Hm 2lm)
Φp = Φ kδ ; priklauso nuo polių geometrinės formos kδ >1, (nes prie vieno poliaus pagrindinio srauto Φ prisideda sklaidos srautas )
Suradę srauto reikšmę, skaičiuojame BS L k
mm m uzp
mm
m= =
b m
Φ Φ ;
Čia bm – poliaus plotis; Lm – poliaus matmuo išilgine mašinos ašimi; Sm=bm Lm– poliaus skerspjūvio plotas; kužp.m – polių užpildymo koeficientas (jei vientiso metalo, =1 )
Iš poliaus įmagnetinimo kreivės BBm=f(Hm) nustatome magnetinio lauko stiprį Hm. Dviejų polių magnetinė įtampa (praeinant per 2 polius nagrinėjamame kontūre):
Fm= 2 Hm hm
5. Statoriaus jungo magnetinė įtampa (Fj = Hj lj)
Srautas, praeinantis jungu: ΦΦ
jp=
2; (kodėl 0,5 poliaus srauto? Todėl, kad poliaus srautas išsišakoja)
Statoriaus jungo vidutinė magnetinė indukcija : ΒΦ Φ
jj
j
j
j jS b L= = ;
Čia bj – jungo aukštis; Lj– jungo matmuo išilgine mašinos ašimi; Sj - jungo skerspjūvio plotas; Iš jungo įmagnetinimo kreivės BBj = f(Hj) nustatome magnetinio lauko stiprį Hj.
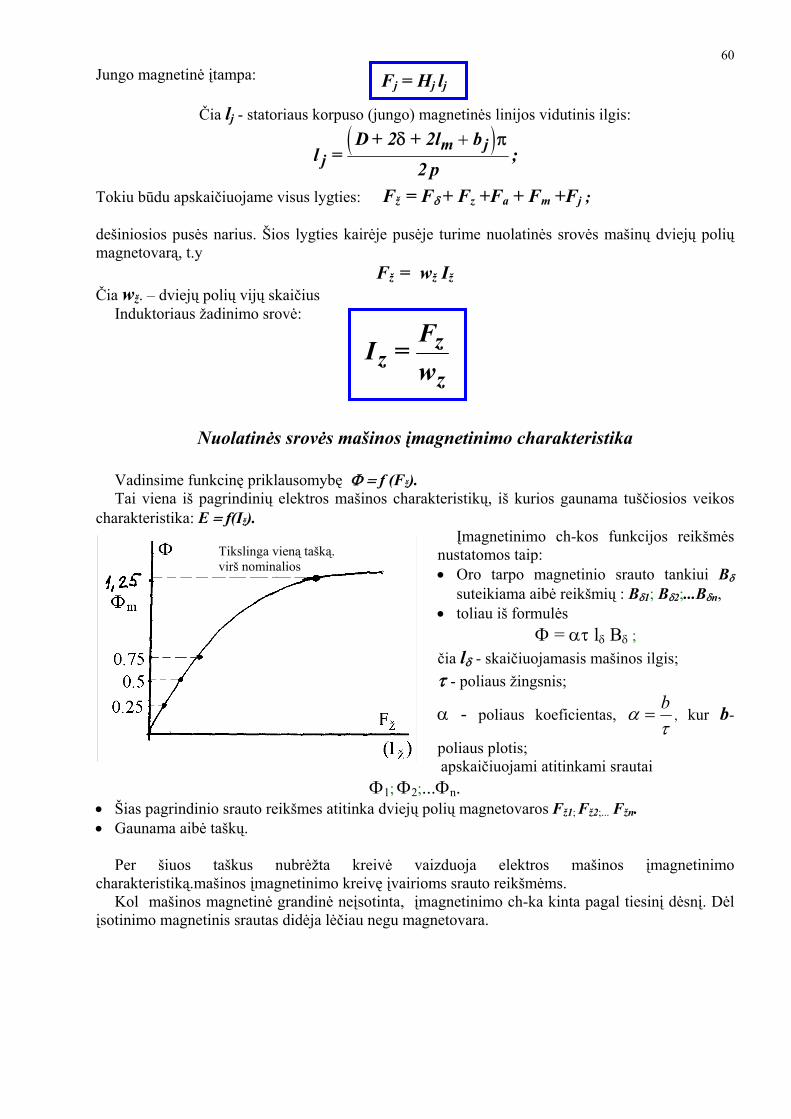
60Jungo magnetinė įtampa:
Čia lj - statoriaus korpuso (jungo) magnetinės linijos vidutinis ilgis:
( )l
b
pj
jm=
D + 2 + 2lδ π+
2;
Fj = Hj lj
Tokiu būdu apskaičiuojame visus lygties: Fž = Fδ + Fz +Fa + Fm +Fj ;
dešiniosios pusės narius. Šios lygties kairėje pusėje turime nuolatinės srovės mašinų dviejų polių magnetovarą, t.y
Fž = wž Iž Čia wž. – dviejų polių vijų skaičius
Induktoriaus žadinimo srovė:
IFwz
z
z=
Nuolatinės srovės mašinos įmagnetinimo charakteristika
Vadinsime funkcinę priklausomybę Φ = f (Fž). Tai viena iš pagrindinių elektros mašinos charakteristikų, iš kurios gaunama tuščiosios veikos
charakteristika: E = f(Iž). Įmagnetinimo ch-kos funkcijos reikšmės
nustatomos taip: Tikslinga vieną tašką. virš nominalios
ė ė i • Oro tarpo magnetinio srauto tankiui BBδ suteikiama aibė reikšmių : Bδ1B ; Bδ2;...Bδn,
• toliau iš formulės Φ = ατ lδ Bδ ;
čia lδ - skaičiuojamasis mašinos ilgis; τ - poliaus žingsnis;
α - poliaus koeficientas, ατ
=b
, kur b-
poliaus plotis; apskaičiuojami atitinkami srautai
Φ1; Φ2;...Φn. • Šias pagrindinio srauto reikšmes atitinka dviejų polių magnetovaros Fž1; Fž2;... Fžn. • Gaunama aibė taškų.
Per šiuos taškus nubrėžta kreivė vaizduoja elektros mašinos įmagnetinimo
charakteristiką.mašinos įmagnetinimo kreivę įvairioms srauto reikšmėms. Kol mašinos magnetinė grandinė neįsotinta, įmagnetinimo ch-ka kinta pagal tiesinį dėsnį. Dėl
įsotinimo magnetinis srautas didėja lėčiau negu magnetovara.

61
4. SROVĖS KOMUTACIJA (Perjungimas)
Sukantis mašinos inkarui, kolektoriaus plokštelės paeiliui liečia šepetį. Pereinant šepečiui nuo vienos plokštelės ant kitos, apvijos sekcija perjungiama iš vienos lygiagrečios šakos į kitą, vadinasi, sekcijoje srovė pakeičia ženklą.
Srovės krypties pasikeitimas sekcijoje, pereinant jai iš vienos lygiagrečios šakos į kitą, vadinamas srovės komutacija.
Sekcija, kurioje vyksta komutacija, vadinama komutuojančiąja sekcija. Perjungiamoje (komutuojamoje) sekcijoje teka kintamoji srovė, ir per laiką, kol šepetys nušliaužia
nuo 1 iki 2 kolektoriaus plokštelės, srovė pamažu turi išnykti, o po to jos kryptis turi pasikeisti priešinga.
Pavaizduosime komutacijos pradžią ir pabaigą ir srovės, tekančios sekcijoje, grafinį vaizdą
i
Ilg
-Ilg Tk
t
Laikas, per kurį įvyksta komutacijos procesas, vadinamas komutacijos periodu Tk. Tai - nedidelis
laiko tarpas nuo momento, kai kolektoriaus plokštelė pradeda liesti šepetį, iki momento, kai plokštelė visai atsiskiria nuo šepečio: Jis priklauso nuo sukimosi greičio ir kolektoriaus plokštelių skaičiaus:
T bnkbk
sk
= ;
Čia k – kolektoriaus plokštelių kiekis; n – inkaro sukimosi greitis [aps/s]; (jei n [aps/ min], reikėtų skaitiklį * iš 60); bš – šepečio plotis; bk – kolektoriaus plokštelės plotis.
Keičiantis srovės krypčiai, šepetys gali kibirkščiuoti. Jeigu nekibirkščiuoja – komutacija gera. Net ir
esant gerai komutacijai, kibirkščiavimą gali sukelti mechaninės priežastys (nustatomos išoriškai apžiūrint). Taigi, per trumpą komutacijos laikotarpį vyksta gana sudėtingas procesas.
Išsiaiškinsime, pagal kokį dėsnį kinta srovė per šį komutacijos laikotarpį.
Srovės nagrinėjimui padarysime prielaidas: • šepečiai yra geometrinėje neutralėje, • izoliacija tarp kolektoriaus plokštelių yra siaura; • bš = bk (šepečio plotis lygus kolektoriaus plokštelės pločiui; • komutuojančioje sekcijoje per visą komutacijos periodą nesiindukuoja elektrovaros (idealiu atveju) ,
• šepečio ir kolektoriaus plokštelės laidis yra proporcingas jų lietimosi plotui: ;1
2
1
2
2
1
ii
SS
rr
== (arba šepečių
kontaktų varža atvirkščiai proporcinga šepečių plotui; varžos kinta, kadangi kinta plotai);
Ilg – lygiagrečios šakos srovė Ia- inkaro srovė
i=+Ilg i= -Ilg i –komutuojamoje sekcijoje
Stabilus taškas
Nusistovėjusi srovė
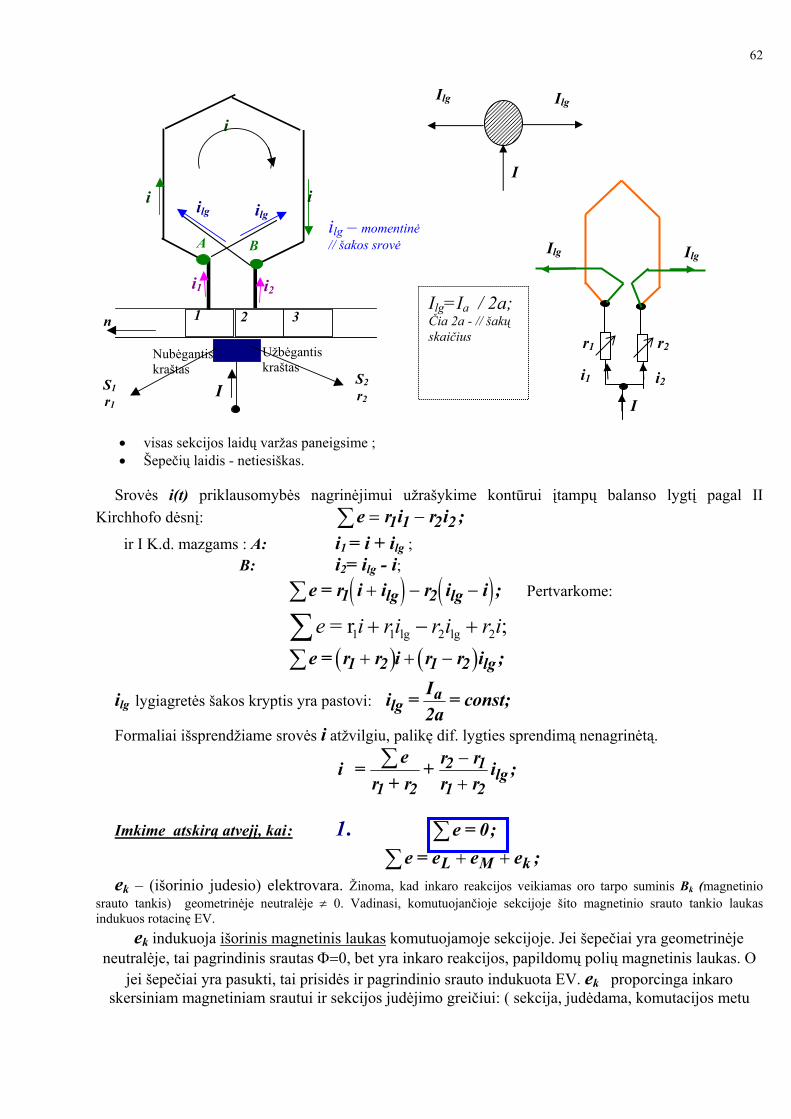
62
• visas sekcijos laidų varžas paneigsime ; • Šepečių laidis - netiesiškas.
Srovės i(t) priklausomybės nagrinėjimui užrašykime kontūrui įtampų balanso lygtį pagal II
Kirchhofo dėsnį: e r i r i∑ = −1 1 2 2 ; ir I K.d. mazgams : A: i1 = i + ilg ; B: i2= ilg - i;
( ) ( )e i r i i= r i1 + − −∑ lg lg ;2 Pertvarkome:
∑ +−+ ;r= 2lg2lg11 iriririe( ) ( )e r i r r= r1 i+ + −∑ 2 1 2 l ;g
ilg lygiagretės šakos kryptis yra pastovi: ilg = I2a
= const;a
Formaliai išsprendžiame srovės i atžvilgiu, palikę dif. lygties sprendimą nenagrinėtą.
i rr r
=e
r + r+ r i ;
1 22
lg∑ −
+1
1 2
Imkime atskirą atvejį, kai : 1. e =∑ 0;
e = eL∑ + +e eM k ; ek – (išorinio judesio) elektrovara. Žinoma, kad inkaro reakcijos veikiamas oro tarpo suminis BBk (magnetinio
srauto tankis) geometrinėje neutralėje ≠ 0. Vadinasi, komutuojančioje sekcijoje šito magnetinio srauto tankio laukas indukuos rotacinę EV.
ek indukuoja išorinis magnetinis laukas komutuojamoje sekcijoje. Jei šepečiai yra geometrinėje neutralėje, tai pagrindinis srautas Φ=0, bet yra inkaro reakcijos, papildomų polių magnetinis laukas. O
jei šepečiai yra pasukti, tai prisidės ir pagrindinio srauto indukuota EV. ek proporcinga inkaro skersiniam magnetiniam srautui ir sekcijos judėjimo greičiui: ( sekcija, judėdama, komutacijos metu
Ilg Ilg
I
n
I S2 r2
S1 r1
1 2 3
A B
i1 i2
ilg ilg i i
i
I
i1 i2
r2 r1
Ilg Ilg
ilg – momentinė // šakos srovė
Nubėgantis kraštas
Užbėgantis kraštas
Ilg=Ia / 2a; Čia 2a - // šakų skaičius

63
kerta inkaro skersinio (išorinio) magnetinio lauko jėgų linijas, todėl joje yra indukuojama EV :
e ek aqd
dtaq
= =Φ
;
( ek=2 Bk l v ws ; čia ws –sekcijos vijų skaičius, BBk - inkaro reakcijos iššauktas magnetinio srauto tankis)
ek gali greitinti, gali ir lėtinti procesą. Didėjant apkrovai, didėja inkaro reakcija ir ek ( ir ), o kartu ir kibirkščiavimas e∑
čia eL – saviindukcijos EV: komutuojančiojoje sekcijoje teka kintamoji srovė. Per laiko periodą Tk ji pasikeičia nuo + ilg iki - ilg . Vadinasi, komutuojančią sekciją veiks saviindukcijos EV.
Labai greitai kintant srovei, komutuojančioje sekcijoje atsiranda gana didelė eL , nes: a) inkaro apvija yra feromagnetinėje aplinkoje, todėl sekcijos induktyvumas yra nemažas; b) srovė turi pasikeisti labai staiga. Ši dedamoji trukdo keistis srovei, lėtina procesą, (ženklas nesikeičia. Neigiamas, jei laikysimės susitarimo, kad kai trukdo kisti srovei)
e = -LL sdidt
; Ls – sekcijos induktyvumas;
eM – savitarpės (abipusės) indukcijos EV. (Inkaro griovelyje yra keli atskiroms sekcijoms priklausantys aktyvieji šonai (2 ir daugiau) ir visos šios sekcijos komutuojamos vienu metu, (nes šepečiai jas yra sujungę trumpai) tai kiekvieno iš tų šonų kintantis magnetinis srautas indukuoja kituose šonuose šią EV.
eM = -M didt
;
čia M – savitarpio induktyvumo koeficientas Be to, reikia atsiminti, kad paprastai šepetys yra platesnis už kolektoriaus padalą ir šepetys sujungia trumpai kartu keletą sekcijų.
Pagal Lenco dėsnį abi EV, eL ir eM lėtina procesą, trukdo kisti sekcijos srovei komutuojančioje sekcijoje, jos abi sudaro reaktyviąją (atstojamąją) EV eR: eR = eL + eM
bet per komutacijos periodą srovė neišvengiamai pasikeičia priešinga. (Geriausia, kai ek ≥ eR) Taigi, jeigu atvejis idealus 1. eL + eM = ek arba ek = eR (kairė pusė
atsveria dešiniąją)
i r rr r
i irr
rr
=−+
=−
+2 11 2
1
1
1
2
1
2
lg lg ; (padalinome iš r2)
S = tT2
kSmax ; S = t
T1k
1 −⎛⎝⎜
⎞⎠⎟ Smax ;
Prisimename lygybę: (izoliacija plonytė, nepaisome storio)
rr
= SS
=1 - t
T
= tT
12
21
kk
tTk
t−; Įstatę gautą
varžų santykio išraišką į srovės lygtį, gauname:
i i T t tt T t
i T tT
it
T tt
T t
kk
kk
k
k
=−
+=
− −+ −
=−−
−
1
12
lg lg lg ;
ir galutinai gauname, kad srovė komutuojamoje sekcijoje proporcinga laikui :
S
t
Tk
S1(t) S2(t)
Šepečių plotas kinta komutacijos laike:
Priimame, kad šepečio laidis proporcingas plotui

64
i tT
ik
= Tk − 2lg ;
Šiuo atveju gauname tiesinę priklausomybę ir galime atvaizduoti grafiškai:
i
-i
Ilg
-Ilg
i1
i2
i2=0
i1=0
0
α2
α2
α1
α1
i2
i1
t1 t2
Tk
t
ilg
Tokia komutacija vadinama tiesine. Čia srovės tankis po šepečiu lieka pastovus visą komutacijos periodą. Iš grafiko galime nustatyti ir sroves i1 ir i2.
Žinodami, kaip kinta šepečių plotai, mes galime skaičiuoti ir srovės tankį.
;Si=J 1
1
11 αtg≡ ;
Si
=J 22
22 αtg≡
Dimensija J: [A /m2] ; Praktiškai J ≈ 6 [A/mm2] Iš šių formulių matome, kad srovės tankis po šepečiu proporcingas tg α1 (tg α2), t.y. jis pastovus per
visą šepečio plotį. Kontakto srovės tankis turi būti <<< nei srovės tankis laiduose, todėl kontaktas turi būti platus
(kontakto varža t.b. labai maža, lyginant su laidininko) Tiesinės (idealiosios) komutacijos atveju kampai α nekinta
α1= α2= const Srovės tankis abiejuose šepečio kraštuose yra pastovus. Tiesinė komutacija yra geriausia, nes ji mašinoje nesukelia jokių kenksmingų pasekmių. Srovės
tankis po šepečiu nekinta per visą komutacijos periodą. Mat, esant tiesinei komutacijai, srovės, tekančios kontaktu šepetys – kolektoriaus plokštelė, stipris kinta proporcingai šio kontakto plotui.
Dabar imkime atvejį 2. e∑ > 0;
Realiomis sąlygomis komutacijos procesas vyksta žymiai sudėtingiau. Jeigu komutuojančią sekciją
veriantis magnetinis srautas nelygus 0, tai komutacija bus kur kas sudėtingesnė. Komutacijos periodas labai trumpas, 10-4 – 10-5 s. Taip greitai kintant srovei, komutuojančioje
sekcijoje atsiranda saviindukcijos EV eL.
Taigi, vykstant realiai sekcijos komutacijai, joje indukuojama EV: e∑ = e + e ;R k
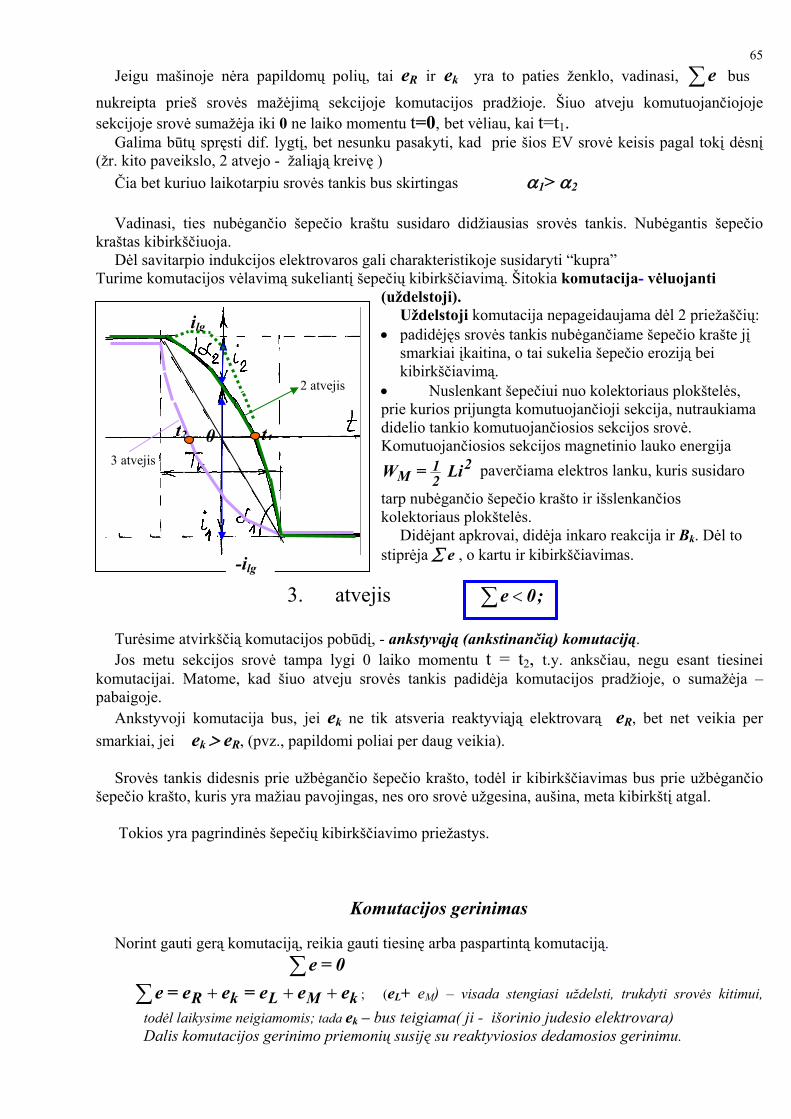
65
eJeigu mašinoje nėra papildomų polių, tai eR ir ek yra to paties ženklo, vadinasi, ∑ bus
nukreipta prieš srovės mažėjimą sekcijoje komutacijos pradžioje. Šiuo atveju komutuojančiojoje sekcijoje srovė sumažėja iki 0 ne laiko momentu t=0, bet vėliau, kai t=t1.
Galima būtų spręsti dif. lygtį, bet nesunku pasakyti, kad prie šios EV srovė keisis pagal tokį dėsnį (žr. kito paveikslo, 2 atvejo - žaliąją kreivę )
Čia bet kuriuo laikotarpiu srovės tankis bus skirtingas α1> α2 Vadinasi, ties nubėgančio šepečio kraštu susidaro didžiausias srovės tankis. Nubėgantis šepečio
kraštas kibirkščiuoja. Dėl savitarpio indukcijos elektrovaros gali charakteristikoje susidaryti “kupra”
Turime komutacijos vėlavimą sukeliantį šepečių kibirkščiavimą. Šitokia komutacija- vėluojanti (uždelstoji).
Uždelstoji komutacija nepageidaujama dėl 2 priežaščių: • padidėjęs srovės tankis nubėgančiame šepečio krašte jį
smarkiai įkaitina, o tai sukelia šepečio eroziją bei kibirkščiavimą.
• Nuslenkant šepečiui nuo kolektoriaus plokštelės, prie kurios prijungta komutuojančioji sekcija, nutraukiama didelio tankio komutuojančiosios sekcijos srovė. Komutuojančiosios sekcijos magnetinio lauko energija W = LiM
12
2 paverčiama elektros lanku, kuris susidaro
tarp nubėgančio šepečio krašto ir išslenkančios kolektoriaus plokštelės.
Didėjant apkrovai, didėja inkaro reakcija ir BBk. Dėl to stiprėja ∑ e , o kartu ir kibirkščiavimas.
3. atvejis
2 atvejis
3 atvejis
ilg
-ilg
t10t2
e∑ < 0; Turėsime atvirkščią komutacijos pobūdį, - ankstyvąją (ankstinančią) komutaciją. Jos metu sekcijos srovė tampa lygi 0 laiko momentu t = t2, t.y. anksčiau, negu esant tiesinei
komutacijai. Matome, kad šiuo atveju srovės tankis padidėja komutacijos pradžioje, o sumažėja – pabaigoje.
Ankstyvoji komutacija bus, jei ek ne tik atsveria reaktyviąją elektrovarą eR, bet net veikia per smarkiai, jei ek > eR, (pvz., papildomi poliai per daug veikia).
Srovės tankis didesnis prie užbėgančio šepečio krašto, todėl ir kibirkščiavimas bus prie užbėgančio
šepečio krašto, kuris yra mažiau pavojingas, nes oro srovė užgesina, aušina, meta kibirkštį atgal. Tokios yra pagrindinės šepečių kibirkščiavimo priežastys.
Komutacijos gerinimas
Norint gauti gerą komutaciją, reikia gauti tiesinę arba paspartintą komutaciją. e∑ = 0
e e ek M∑ + + ek+= e = eR L ; (eL+ eM) – visada stengiasi uždelsti, trukdyti srovės kitimui,
todėl laikysime neigiamomis; tada ek – bus teigiama( ji - išorinio judesio elektrovara) Dalis komutacijos gerinimo priemonių susiję su reaktyviosios dedamosios gerinimu.
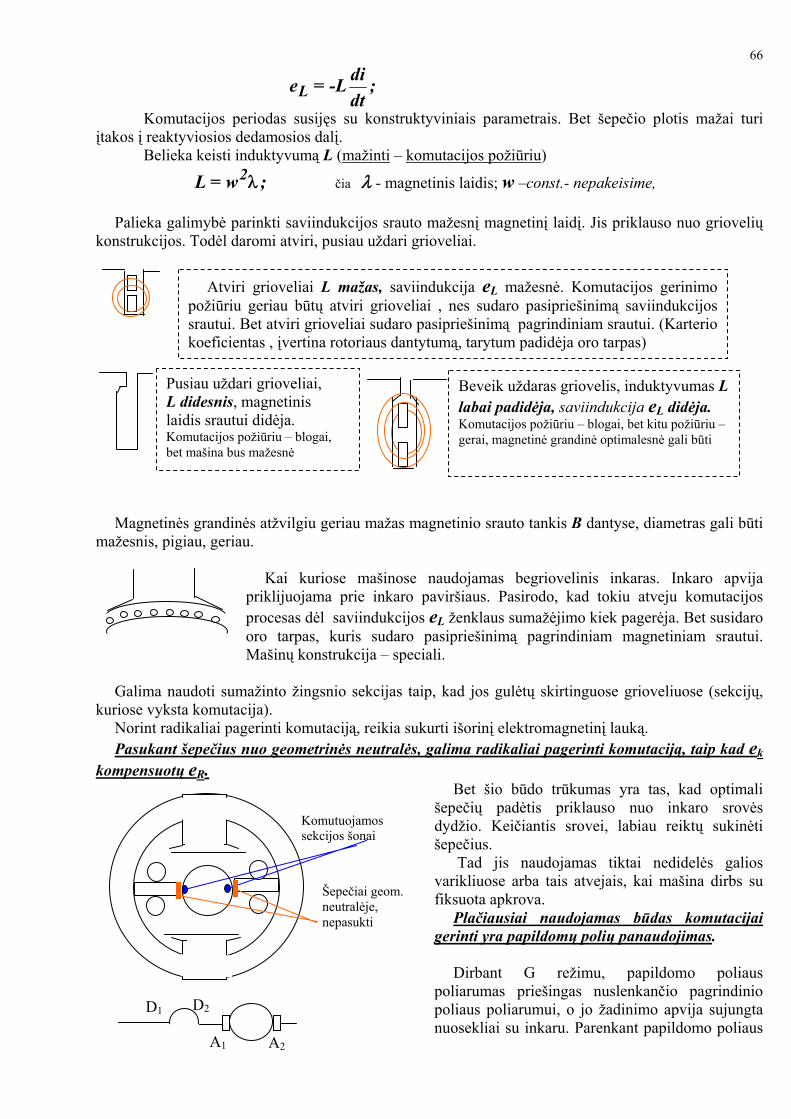
66
e = -L didtL ;
Komutacijos periodas susijęs su konstruktyviniais parametrais. Bet šepečio plotis mažai turi įtakos į reaktyviosios dedamosios dalį.
Belieka keisti induktyvumą L (mažinti – komutacijos požiūriu)
čia λ - magnetinis laidis; w –const.- nepakeisime, L = w2λ ;
Palieka galimybė parinkti saviindukcijos srauto mažesnį magnetinį laidį. Jis priklauso nuo griovelių konstrukcijos. Todėl daromi atviri, pusiau uždari grioveliai.
Atviri grioveliai L mažas, saviindukcija eL mažesnė. Komutacijos gerinimo požiūriu geriau būtų atviri grioveliai , nes sudaro pasipriešinimą saviindukcijos srautui. Bet atviri grioveliai sudaro pasipriešinimą pagrindiniam srautui. (Karterio koeficientas , įvertina rotoriaus dantytumą, tarytum padidėja oro tarpas)
Pusiau uždari grioveliai, L didesnis, magnetinis laidis srautui didėja. Komutacijos požiūriu – blogai, bet mašina bus mažesnė
Beveik uždaras griovelis, induktyvumas L labai padidėja, saviindukcija eL didėja. Komutacijos požiūriu – blogai, bet kitu požiūriu – gerai, magnetinė grandinė optimalesnė gali būti
Magnetinės grandinės atžvilgiu geriau mažas magnetinio srauto tankis B dantyse, diametras gali būti
mažesnis, pigiau, geriau.
Kai kuriose mašinose naudojamas begriovelinis inkaras. Inkaro apvija priklijuojama prie inkaro paviršiaus. Pasirodo, kad tokiu atveju komutacijos procesas dėl saviindukcijos eL ženklaus sumažėjimo kiek pagerėja. Bet susidaro oro tarpas, kuris sudaro pasipriešinimą pagrindiniam magnetiniam srautui. Mašinų konstrukcija – speciali.
Galima naudoti sumažinto žingsnio sekcijas taip, kad jos gulėtų skirtinguose grioveliuose (sekcijų,
kuriose vyksta komutacija). Norint radikaliai pagerinti komutaciją, reikia sukurti išorinį elektromagnetinį lauką. Pasukant šepečius nuo geometrinės neutralės, galima radikaliai pagerinti komutaciją, taip kad ek
kompensuotų eR. Bet šio būdo trūkumas yra tas, kad optimali
šepečių padėtis priklauso nuo inkaro srovės dydžio. Keičiantis srovei, labiau reiktų sukinėti šepečius.
D1 D2
A1 A2
Komutuojamos sekcijos šonai
Šepečiai geom. neutralėje, nepasukti
Tad jis naudojamas tiktai nedidelės galios varikliuose arba tais atvejais, kai mašina dirbs su fiksuota apkrova.
Plačiausiai naudojamas būdas komutacijai gerinti yra papildomų polių panaudojimas.
Dirbant G režimu, papildomo poliaus
poliarumas priešingas nuslenkančio pagrindinio poliaus poliarumui, o jo žadinimo apvija sujungta nuosekliai su inkaru. Parenkant papildomo poliaus

67
apvijos vijų skaičių, galima pasiekti, kad būtų tenkinama sąlyga
∑ e = eR +ek = 0 ⇒ ek= - eR . Tai tiesinės komutacijos atvejis. Papildomų polių srautas turi keistis, keičiantis inkaro grandinės srovei. Tai realizuojama labai
paprastai – papildomų polių apviją jungiant nuosekliai su inkaru. Kartais įrengiamas tiktai vienas papildomas polius. Jis indukuos tik vienoje sekcijos dalyje
papildomą EV, bet tas nieko blogo nesudaro. Taigi, papildomų polių panaudojimas yra pagrindinė komutacijos gerinimo priemonė
( vidutinės ir didelės galios mašinose). Na, o kompensacinė apvija tik inkaro reakciją gerina
Naudingi patarimai plačiau:
• Didelės galios elektros mašinose komutacijai pagerinti naudojama kompensacinė apvija. Ji taip pat jungiama nuosekliai su inkaro apvija, o jos poliarumas parenkamas taip, kad esant bet kokiai apkrovai, inkaro reakcija būtų beveik kompensuojama. • Techniniais ir ekonominiais sumetimais mažos galios elektros mašinose (iki 1 kW) daryti papildomus polius, tuo labiau kompensacinę apviją, neracionalu. Čia uždelstoji komutacija sušvelninama, perstumiant šepečius nuo geometrinės neutralės inkaro sukimosi kryptimi, dirbant G režimu, ir prieš inkaro sukimosi kryptį, dirbant variklio režimu. Šepečių pasukimo kampas turi būti didesnis už fizinės neutralės kampą. • Esant įvairioms mašinos apkrovoms (inkaro srovei Ia), kinta inkaro reakcija, kinta ir kampas, kuriuo reikėtų pasukti šepečius. Todėl realiai šepečiai pastatomi į fiksuotą padėtį, kurioje visišką reaktyviosios EV kompensavimą atitinka tam tikra vidutinė apkrova. • Komutacijos procesą galima pagerinti, didinant šepečio kontaktinę varžą. Didžiausią lyginamąją elektrinę varžą turi angliniai-grafitiniai šepečiai (ρ ≤ 60 Ω mm2 /m), kiek mažesnę – grafitiniai ir elektrografitiniai šepečiai, mažiausią – variniai- grafitiniai ir bronziniai-grafitiniai šepečiai. • Nemažą reikšmę komutacijai turi ir šepečių plotis. Kuo platesnis šepetys, tuo daugiau sekcijų tuo pat metu komutuoja, vadinasi, padidėja eM. Tačiau labai siauri šepečiai nepakankamai mechaniškai atsparūs. Tikslinga naudoti šepečius, kurių plotis lygus dviems kolektoriaus padaloms (paprastoji apvija). • Jei mašina projektuojama darbui sunkiomis sąlygomis (esant dideliems sukimosi greičiams, dideliems perkrovimams), stengiamasi mažinti sklaidos magnetinį laidį Λ. Tam tikslui daromi atviri platūs ir žemi inkaro grioveliai. • Didelę įtaką komutacijai turi inkaro apvijos tipas. Jei apvija sutrumpinta, (y1<τ), tai drauge komutuojančių sekcijų aktyvieji šonai bus skirtinguose grioveliuose, dėl to sumažės abipusės indukcijos EV eM. Čia aptartos elektromagnetinės komutacijos priežastys.
Yra ir mechaninių. Tai :
o minimalus kolektoriaus mušimas, dėl kurio ima vibruoti šepečiai, pakankamas šepečių prispaudimas prie kolektoriaus;
o kolektorių liečiančio šepečio paviršiaus kokybė; o kolektoriaus švarumas; Aptarnaujantis personalas turi viso to neužmiršti.

68NUOLATINĖS SROVĖS MAŠINŲ INKARO APVIJOS
Inkaro apvijos pagrindinis elementas (arba elementari apvijos dalis) yra sekcija, sudaryta iš vienos arba kelių vijų, kurios du galai jungiami prie skirtingų kolektoriaus plokštelių. Sekcija susideda iš aktyviųjų
šonų ir galūnių, jungiančių aktyviuosius šonus. Aktyvieji šonai suklojami į inkaro griovelius dviem sluoksniais. Sekcijos jungiamos nuosekliai ir sudaro uždarą grandinę. Be to, kiekvienos sekcijos pradžia ir galas prijungti prie dviejų kolektoriaus plokštelių: prie kiekvienos plokštelės prijungiama vienos sekcijos pradžia ir kitos sekcijos galas., t.y., vienai sekcijai tenka viena kolektoriaus plokštelė. Jeigu griovelyje yra du aktyvieji šonai skirtinguose sluoksniuose (viršutinis vienos sekcijos ir apatinis kitos sekcijos šonas), tai jis vadinamas elementariuoju grioveliu. Bendruoju atveju viršutiniame ir apatiniame sluoksnyje gali būti n aktyviuojų šonų (4; 6; 8 ir t.t.).
S N
y1
τ
1 2 10 11
Čia matome 4 elementarius griovelius, kurie šiuo atveju yra ir realūs. Dažniausiai daromos dvisluoksnis išdėstymas sekcijų grioveliuose. Čia aktyviųjų šonų griovelyje n = 2
1 2 3 4
Viename realiame griovelyje dvi sekcijos. Čia realių griovelių matome Z = 2; o elementarių griovelių Ze = 4. Aktyviųjų šonų viename realiame griovelyje n = 4. Viename realiame griovelyje yra 2 elementarūs grioveliai
1 2 3
Čia griovelis susideda iš 3 elementariųjų griovelių, n = 6; Z = 1; Ze =3;
Kadangi sekcija susideda iš 2 aktyviųjų šonų, tai kiekvieną sekciją atitinka vienas elementarus griovelis. Galioja lygybė: S = K = Ze ; čia S - sekcijų skaičius, K - kolektoriaus plokštelių skaičius, Ze - elementariųjų griovelių skaičius; Kad EVJ, indukuojamos aktyviuosiuose sekcijos šonuose, susidėtų, sekciją į inkaro šerdies griovelius reikia dėti taip, kad sekcijos plotis būtų lygus poliaus žingsniui, arba tik nežymiai nuo jo skirtųsi. y1 – sekcijos plotis; jis renkamas artimas poliaus žingsniui τ:
y1 ≅ τ ; (čia formulės esmė: S= τ )
Poliaus žingsnis τ – inkaro paviršiaus dalis, tenkanti vienam poliui:
τ π= D2p ; čia D – inkaro skersmuo ( ilgio vienetais);
N S
τ
τ
Arba τ = Z2p
e ; (sąlyginiais vienetais -elementariais grioveliais)
Šį atstumą patogiausia įvertinti elementariais grioveliais. Sekcijos plotis, išreikštas elementariais grioveliais, gali būti tik sveikas skaičius
y1 – būtinai sveikas skaičius. (Dažniausiai turime realius griovelius, kuriuos matome magnetolaidyje - Z.) Tarp realių ir elementarių griovelių galioja toks santykis: Z ≤ Ze;
Sekcijos plotis arba apvijos pirminis žingsnis: y1Z2p= e ± ε; arba y1
S2p= ± ε; (nes Ze=S),
čia ε - dydis, mažesnis už 1, ε < 1, kurį atimant arba pridedant galima gauti žingsnį y1, išreikštą sveiku skaičiumi.

69Yra skiriamos:
• paprastoji kilpinė , • paprastoji banginė, • kilpinė sudėtinė; • banginė sudėtinė ir • mišrioji apvijos.
Apvijos schema turi parodyti: Kaip sekcijos jungiamos tarpusavyje ir prie kolektoriaus plokštelių; Šepečių kiekį ir orientacinę jų padėtį. Esminis požymis – lygiagrečių šakų kiekis (nuo to priklauso įtampa, srovė). Srovę lygiagretėje
šakoje nulems galia. Pvz. Mašina U=100 V; I=100 A; Tada galia P=10.000=10kW; Kadangi išlaikomas apvijos uždarumo principas, minimaliai srovė pasidalins į lyginį skaičių lygiagrečių šakų (į 2- minimaliu atveju), tarkime 2 šakas po 50 A. Jei srovės tankis (maždaug standartinis)
J=5A/mm2, tai laido skerspjūvis bus S AA
mm
= = 10 mm2505 2
. Jei šį skaičių gautume didesnį,
reikėtų storesnio laido, bet jis gali netilpti į griovelį, tada išeitis – didinti // šakų skaičių. Čia gavome realaus laidininko skerspjūvį, būna ir didesnių.
Išvada: Lygiagrečių šakų kiekį nulemia srovė. Jei norime plonesnių laidų, reikia daugiau lygiagrečių šakų (tos pačios galios mašinai).
Vidutinės, didelės galios mašinų apvijos kartais klojamos vienu sluoksniu (lyg “apsiuvamas” inkaras. Mažos galios, ypač siekiant automatizuoti klojimą, iš pradžių užvyniojami inkaro gilesni griovelių sluoksniai, po to klojami viršutiniai sluoksniai. To privalumas – lengviau suvynioti, trūkumas – gaunasi asimetrinė apvija (jei ji ilgesnė), padidėja apvijos varža, dėl to padidėja nuostoliai.
Dažniausiai klojamos dvisluoksnės apvijos, nors čia daug rankų darbo, neįmanoma automatizuoti. Sekcijos paruošiamos iš anksto, jų plotis atitinka reikiamą griovelių kiekį, darbininkui belieka sekcijas įsprausti į atitinkamą griovelio sluosnį.
Paprastoji kilpinė apvija
Čia kiekviena sekcija prijungiama prie dviejų greta esančių kolektoriaus
plokštelių. Gali būti vienos vijos ar dviejų vijų sekcija. Klojant sekcijas ant inkaro šerdies, kiekvienos sekančios sekcijos pradžia jungiama su pirmesnės sekcijos galu. Taip einama inkaro (ir kolektoriaus) paviršiumi, ir vienu apėjimu sudedamos visos sekcijos, kol paskutinės sekcijos galas sujungiamas su pirmosios pradžia, t.y. apvija uždaroma. Parodysime apvijų žingsnius – atstumus ant inkaro tarp sekcijų šonų. Trumpiausias atstumas inkaro paviršiuje tarp tos pačios sekcijos aktyviųjų šonų vadinamas pirminiu daliniu apvijos žingsniu (inkaru) y1. Kaip minėjome, šis atstumas ir t.b. ≅ τ. y2 – antrinis dalinis žingsnis (inkaru) - atstumas tarp pirmosios sekcijos apatinio sluoksnio aktyviojo šono ir antrosios sekcijos viršutinio sluoksnio aktyviojo
šono.(Taip pat matuojamas elementariais grioveliais).
y
y1
y2
y2
yk
Žinant y1 ir y2, galima rasti apvijos žingsnį y: (tai atstumas tarp dviejų viena paskui kitą einančių sekcijų aktyviųjų šonų, esančių viename sluoksnyje.)
y = y1 - y2, Paprasčiausiu atveju y =1 – paprasta kilpinė apvija; y > 1 – sudėtinė kilpinė apvija; (Paprastai apsiribojama y =2.)

70Klodami apvijos sekcijas, pasislenkame ne tik inkaro šerdimi, bet ir kolektoriumi. Atstumas tarp 2 kolektoriaus plokštelių, prie kurių prijungta tos pačios sekcijos pradžia ir galas, vadinamas žingsniu kolektoriumi yk
yk = y Apvijos žingsniai kolektoriumi matuojami kolektoriaus padalomis (plokštelėmis).
Parodyta apvija vadinama dešinine ( y = +1), nes, klodami sekcijas, einame inkaru į dešinę. Gali būti ir kairinė, tada y = -1. Bendru atveju paprastajai kilpinei apvijai: y = ±1.
I pvz. paprastosios kilpinės apvijos išklotinės sudarymo pavyzdį. Dvipolė mašina
Duota: dvipolės mašinos: 2p=2; S=K=9; y=1; Apskaičiuosime pirminį apvijos žingsnį : y1
12= = =S
2p92± −ε 4; (kad gauti sveiką skaičių
geriau naudoti minusą (-), negu (+) pliusą); Antrinis žingsnis: y y2 1= y = 4 = 3;1 − − Dabar pakanka davinių sudaryti schemai.
Išklotinė braižoma taip:
1. Sužymimi ir sunumeruojami visi grioveliai; be to, sekcijos numeris atitinka numerį griovelio, kurio viršutiniame sluoksnyje yra tos sekcijos vienas iš aktyviųjų šonų.
2. Viršutinio sluoksnio aktyvieji šonai schemoje vaizduojami ištisinėmis linijomis, o apatinio
sluoksnio šonai – brūkšninėmis; 3. Braižomos ir sužymimos kolektoriaus plokštelės; 4. Braižymo patogumui sudaroma sujungimų lentelė, kurioje horizontalios linijos vaizduoja
sekcijas, o pasvirusios – sekcijų jungimo nuo kolektoriaus pusės tvarką. 5. Nubraižomi polių kontūrai. Kiekvieno poliaus zonai tenka 9/2=4,5 griovelių. Poliaus plotį imti
siauresnį, apie 0,8τ. Polių poliarumas keičiasi paeiliui.

716. Nubraižomi šepečiai. Atstumas tarp šepečių taip pat turi atitikti poliaus žingsnį: K/2p
kolektoriaus padalų. Šiuo atveju taip: 9/2=4,5. Jei pirmas šepetys ant (9-1) kolektoriaus plokštelės, tai sekantis už 4,5, - ant 5: Šepetys statomas maždaug ties poliaus ašimi. Šepečiai išdėstomi ant kolektoriaus tolygiai. Tiksli vieta nustatoma eksperimentiškai.
Išdėstydami šepečius ant kolektoriaus vaizdumo dėlei manykime, kad apvijos elektrinis kontaktas su
išorine grandine vyksta ne per kolektorių ir šepečius, o per vadinamuosius sąlyginius šepečius, kurie lyg būtų prispausti prie inkaro paviršiaus. Tada didžiausią mašinos EV vertę atitinka sąlyginių šepečių buvimas geometrinėje neutralėje. Bet kadangi kolektoriaus plokštelės, prie kurių prijungtos sekcijos, pasuktos šių sekcijų aktyviųjų šonų atžvilgiu maždaug 1/2 τ, tai, pereinant nuo sąlyginių šepečių prie realių, iš tiesų šepečiai prispaudžiami prie kolektoriaus ties pagrindinių mašinos polių ašimis.
Šepečiai turi būti ten, kur keičiasi elektrovaros kryptis (Specialiai nedaroma vienodo griovelių skaičiaus vienam poliui, nes žymiai padidėja elektrovaros pulsacijos.)
Apvijos savybės: gavome 2 lygiagrečias šakas su elektrovara e.
I = Ia, nes ši mašina dvipolė
IlgIlg
e eGeometrinė neutralė
Sąlyginiai šepečiai
Realūs šepečiai- ties polių ašimi
N
S
Kryptis priklauso nuo to, ar tai G ar V
(e kryptis priklauso nuo to, ar tai G ar V) Visuomet gauname lyginį lygiagrečių šakų skaičių. Čia 2a = 2; (gali būti 4 ir t.t.)
Bendru atveju kiekvienos lygiagrečios šakos sekcijų EV sumuojasi. Kadangi visos šakos sujungtos lygiagrečiai, tai visos inkaro apvijos elektrovara lygi vienos lygiagrečios šakos elektrovarai, tuo tarpu inkaro apvijos srovė lygi visų apvijos šakų srovių sumai.
Ia= 2a * ilg;
Nagrinėjamoji inkaro apvija turi 2 lygiagrečias šakas, t.y. tiek, kiek mašinoje yra pagrindinių polių. Toks sutapimas ne atsitiktinis, nes paprastojoje kilpinėje apvijoje lygiagrečių šakų skaičius visada lygus pagrindinių mašinos polių skaičiui: 2a=2p; Arba šiuo atveju 2a = 2 ;
(Kilpinės apvijos šepečių skaičius, taip pat šakų skaičius priklauso nuo polių skaičiaus.)
Nuo inkaro apvijos lygiagrečiųjų šakų skaičiaus priklauso pagrindiniai mašinos darbo parametrai: įtampa ir srovės stipris.
Pvz.:
Duota: šešiapolė mašina, 2p = 6 ; kilpinė apvija iš 36 sekcijų.: S =36; Rasti: mašinos elektrovarą E ir srovės stiprį Ia, jeigu kiekvienoje apvijos sekcijoje indukuojasi EV, kurios efektinė vertė E=10V ( atskirų sekcijų E sumuojasi, sudarydamos vienos // šakos E), o sekcijų vieno aktyviojo šono laido skerspjūvio plotas apskaičiuotas Ilg =15 A.

72Sprendimas:
// šakų skaičius 2a = 2p = 6, be to, kiekviena lygiagreti šaka turi sekcijų Sl.š.=S/2a=S/2p=36/6=6. Tuomet vienos lygiagretės šakos elektrovara E = 6 *10 = 60 V; mašinos srovė Ia = 6*15= 90 A. Jeigu mašina turėtų 8 polius, o visos kitos sąlygos būtų tos pačios, tai jos E sumažėtų iki 40 V, o srovė Ia sustiprėtų iki 120 A. Sprendimas baigtas.
2 Pvz. paprastosios kilpinės apvijos:
1 4/
2 5/
3 6/
7/
5
4
8/
12 1/
13 2/
6 9/
7
Keturpolės mašinos
Duota: keturpolės mašinos: 2p=4; S=K=14; y=1; Skaičiuojame pirminį ir antrinį apvijos žingsnius:
y1 = - = 3144
24 ; y2 = 3 - 1 = 2;
• Nustatome poliaus (šepečių) žingsnį τ = S/2p = 14/4 = 3,5; Tam atstumą, išreikštą grioveliais (ar sekcijomis) daliname iš 4 ir tai bus poliaus žingsnisτ, pats polius bus truputį siauresnis . Sekcijos plotis nebūtinai sutampa su poliaus žingsniu . • Dabar galime pažymėti elektrovarų kryptis sujungimų lentelėje;
N S
τ10/
8 11/
10 13/
11 14/
14 3/
1
9 12/

73
Pirmąjį šepetį tikslinga dėti ant 4-tos kolektoriaus plokštelės; • Antrąjį : už 3,5 ant tarp 7-8 kolektoriaus padalų; • Trečiąjį:už (2*3,5) ant 11 kolektoriaus padalos; • Ketvirtąjį: už (3*3,5), ant 14-1 kolektoriaus padalų (šepetys maždaug ties poliaus ašimi.) • Matome, kad turi būti ne mažiau 4 šepečių, ir dabar juos reikia sujungti elektriškai (lygiagrečiai
vienavardžius).
! ! ! Paprastojoje kilpinėje apvijoje – kiek polių, tiek ir šepečių.
Sąlyginių šepečių išdėstymas ant inkaro
Dėl asimetrijos susidaro uždara grandinė, teka srovė,kuri gali sutapti, gali nesutapti su išorine šepečių srove
1,2,3
A1
A2
Pvz, jei e1> e2, tai tekės srovė
e1
e1
BB B1 B2
e2
3 pvz. paprastosios kilpinės apvijos pavyzdys:
( savarankiškam darbui) Duota: Z = Ze=16; 2p = 4 (keturpolė mašina); Rasti: Nubraižyti paprastosios dešininės
kilpinės apvijos išklotinę, išdėstyti šepečius, nustatyti lygiagrečių šakų skaičių. Sprendimas:

741. Pirmasis dalinis žingsnis parenkamas lygus y1=τz ± ε
arba 1 5/
2 6/
y Zpe
1 20= = 16
4= 4.± ±ε 7/ 3
8/ 4 2. Iš apvijos tipo išplaukia, kad rezultatinis (atstojamasis) žingsnis ir žingsnis kolektoriumi lygus 1:
y = yk=1.
3. Antrasis dalinis žingsnis y2 = y – y1 = 1- 4= -3.
τ = = =Sp2
164
4
Bus didelės elektrovaros E pulsacijos dėl to, kad sekcijos S plotis sutampa su poliaus žingsniu, bet užtat yra vaizdu braižymo prasme.
Šepetys čia:
1. Matome apvijos išklotinę; induktoriaus poliai išdėstyti virš inkaro su apvija. Rodyklėmis
pažymėtos viršutinio sluoksnio sekcijų elektrovaros. 2. Šepečių plotis lygus kolektoriaus plokštelės pločiui. 3. Grioveliai 2, 6, 10 ir 14 sutampa su geometrine neutrale. Vadinasi, šepečių A1 ir A2 poliarumas
neigiamas, o šepečių B1 ir B2 - teigiamas. Vienodo poliarumo šepečiai sujungiami lygiagrečiai 4. Taigi, šiuo atveju inkaro apviją šepečiai dalija į 4 lygiagrečias šakas, kurių sekcijos sujungtos
nuosekliai ir jų EV kryptys sutampa.
1 2 3 4 5 6 7 8 9 13 1410 11 12S S
2 3 4 5 6 7 9 12 1 16
N N 15 16
S
8 10 11 13 14 155
- - + +A1 A2
B1 B22 sekcija(ji baigiasi ties 3 kol. plokštele) užtrumpinta A1 šepečiu
EVJ kryptis, ją nulemia poliai, o srovės kryptį nulemia šepečių vieta
Srovė čia pasidalina į 4 // šakas
5 6
7 8 9
10
11
12 13
14
15
16
1
9/
10/
11/
12/
13/
14/
15/
16/
1/
2/
3/
4/
5/

755. Taigi paprastoje kilpinėje apvijoje lygiagrečių šakų skaičius 2a lygus polių skaičiui 2p, t.y. 2a =
2p= 4.
Sudėtinė kilpinė apvija
Paprastojoje kilpinėje apvijoje lygiagrečių šakų yra tiek, kiek mašinoje yra pagrindinių polių. Todėl norint, kad apvijoje būtų daug lygiagrečių šakų (o tai būtina, norint gauti žemos įtampos mašinas, arba norint naudoti plonesnius laidus, optimizuojant srovės tankį laiduose) reikėtų mašiną daryti daugiapolę. Tada ji būtų daug didesnė ir brangesnė. Paprasčiau palikti seną polių skaičių, o vietoje paprastosios kilpinės apvijos imti sudėtinę Tokia inkaro apvija – tai keletas paprastųjų kilpinių apvijų, suvyniotų ant vieno inkaro.
Sudėtinės kilpinės apvijos lygiagrečių šakų skaičius: 2a = 2p * m; Čia m – kartotinumo koeficientas, nusakantis paprastųjų kilpinių apvijų, iš kurių sudaryta sudėtinė
apvija, skaičių. Mašinoje su sudėtine kilpine apvija šepečių plotis turi būti toks, kad kiekvienas šepetys tuo pačiu
metu dengtų ne mažiau kaip m kolektoriaus plokštelių, t.y. tiek, kiek į sudėtinę apviją įeina paprastųjų apvijų (šepečių plotis padidėja). Šiuo atveju apvijos šepečiu sujungiamos lygiagrečiai viena su kita. Tam tenka vienos apvijos sekcijų šonus ir kolektoriaus plokšteles praskirti ir įdėti tarp jų kitos apvijos sekcijų šonus bei kolektoriaus plokšteles. Taip apvijos žingsnis padidėja m kartų:
y = yk= m .
1. pvz. sudėtinės kilpinės apvijos:
a) kai apvija susideda iš yra 2jų uždarų dalių Duota: Ant keturpolės 2p = 4 nuolatinės srovės mašinos inkaro yra sudėtinė kilpinė apvija,
susidedanti iš S=16 sekcijų. Reikia sudaryti išklotinę apvijos schemą, kai : kartotinumo koeficientas m=2.
Sprendimas: apvijos žingsniai:
y1 = = - 0 = 4; Z2p
164
e ± ε
y = y = m = 2;ky2 = y - y = 4 - 2 = 21
;
1 5/
3 7/
5 9/
7 11/
9 13/
11 15/
13 1/
15 3/
1
2 6/
4 8/
6 10//
8 12/
10 14/
12 16/
14 2
16 4/
2
Šepečių poliaus)žingsnis:τ = = =Sp2
164
4
Sudarome lentelę pirmajai ir antrajai apvijai: Pirmiausiai išdėstysime visas vienos
paprastosios apvijos sekcijas (nelyginių numerių sekcijas (1, 3, 5 ir t.t.). šių sekcijų galus prijungiame prie nelyginių kolektoriaus plokštelių.
Po to ant inkaro išdėstysime kitas paprastosios apvijos sekcijas (su lyginiais numeriais: 2; 4; 6; ir t.t.) Šepečiai išdėstomi ir jų poliarumas nustatomas ta pačia tvarka, kaip ir paprastojoje kilpinėje apvijoje. Šepečių plotis laikomas lygus dvigubai kolektoriaus padalai. Apvijos lygiagrečių šakų skaičius:
2a = 2 p * m = 4 * 2 =8
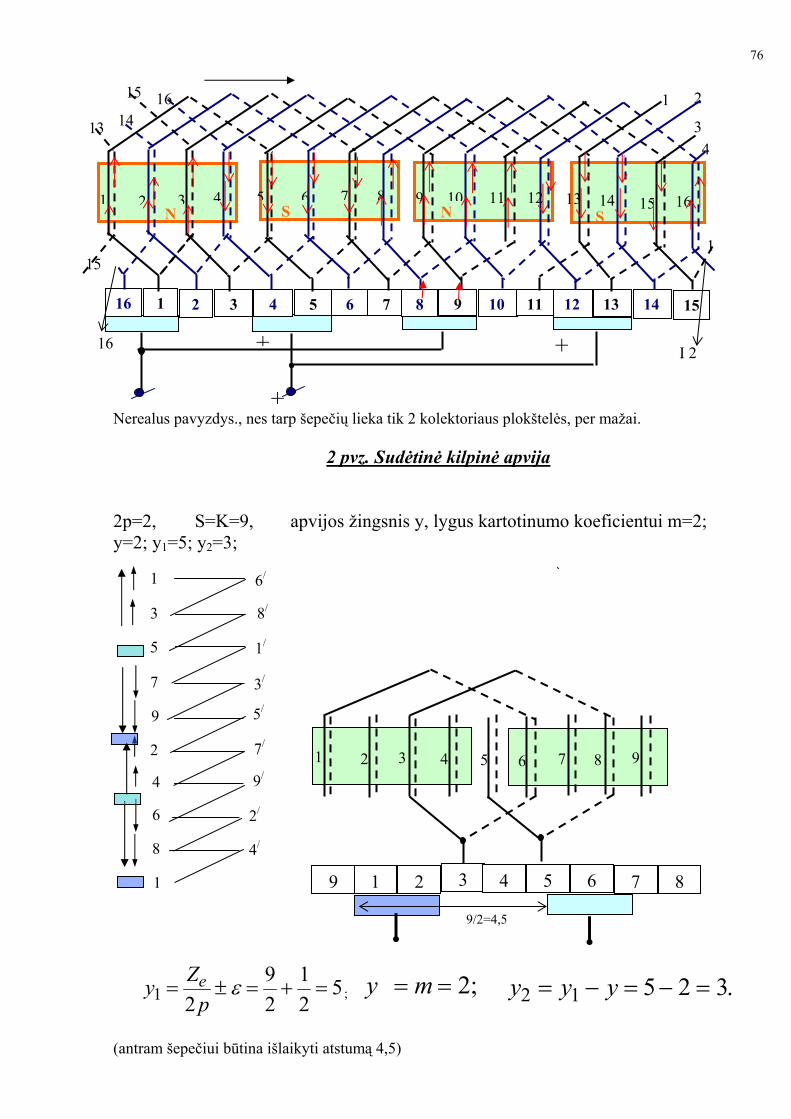
76
Nerealus pavyzdys., nes tarp šepečių lieka tik 2 kolektoriaus plokštelės, per mažai.
2 pvz. Sudėtinė kilpinė apvija
2p=2, S=K=9, apvijos žingsnis y, lygus kartotinumo koeficientui m=2; y=2; y1=5; y2=3;
y Zpe
1 292
12
5= ± = + =ε ; y m= = 2; y y y2 1 5 2 3= − = − = .
(antram šepečiui būtina išlaikyti atstumą 4,5)
1 2 3 4 5 6 7 8 9 13 14 10 11 12N N S S
2 3 4 5 6 7 8 9 10 11 12 13 1 16 14 15
15
1
13
15
3
15
16
214
16 Į 2
4
16
1
- -+ +
+-
1 6/
3 8/
5 1/
7 3/
9 5/
2 7/
4 9/
6 2/
8 4/
1
1 2 3 4 5 6 7 8 9
3 4 5 6 7 8219
9/2=4,5

77
Kai yra lyginis griovelių skaičius, (dvipolėje mašinoje) visada gauname du kartus uždarą apviją.
Viena dalis apvijos sudaro uždarą kontūrą ir kita dalis apvijos taip pat.
šepetys šepetys
Vienu platesniu šepečiu iš karto prisijungiame prie dviejų išsišakojimo taškų.
šepetys
Kai sekcijų skaičius ir apvijos žingsnis turi bendrą daliklį, gauname tiek kartų uždarą apviją, koks yra
tas daliklis. Išvada: Ar paprastoji kilpinė apvija ar sudėtinė, šepečių kiekis visuomet lygus
polių kiekiui. Tiek paprastąją, tiek sudėtinę apviją galima sudaryti, esant bet kuriam griovelių
skaičiui.

78Paprastoji banginė apvija
Kilpinėje apvijoje antrasis žingsnis buvo
daromas atgal. Bet galima daryti antrą žingsnį pirmyn ta
pačia kryptimi, kaip ir pirmasis žingsnis. Taigi, banginė apvija gaunama, nuosekliai jungiant ties įvairiomis polių poromis esančias sekcijas. Banginės apvijos sekcijų galai prijungiami prie kolektoriaus plokštelių, viena nuo kitos nutolusių per apvijos žingsnį y, lygų apvijos žingsniui kolektoriumi yk.:
y = yky = y1 +y2 ;
y1 ≈ τ ; y2 ≈ τ (poliaus žingsniui) Vieną kartą apeinant inkarą, suklojama
tiek sekcijų, kiek apeinant inkarą mašinoje yra polių porų, be to, paskutinės sekcijos galas prijungiamas prie kolektoriaus plokštelės, kuri yra greta pirmosios.
kairinė
dešininė
Kadangi apvijos žingsnis kolektoriumi yk apima tą kolektoriaus apskritimo ilgį, kuris atitinka vieną
polių porą, tai, vieną kartą apėję kolektorių, mes pasislenkame dydžiu m=1 (paprastoje, o sudėtingoje gali būti > 1; per kolektoriaus padalų skaičių (yk p)) ir ateiname prie plokštelės, esančios greta pirmosios. Taigi galime užrašyti
y p ± m = Z . e Galime neprieiti arba pereiti, todėl m bus su minusu (–) - kairinei apvijai, su pliusu (+ )- dešininei
apvijai). Turėsime pilną apėjimą, t.y. elementarių griovelių skaičių. Bangos apvijos žingsnis (rezultatinis, arba apvijos žingsnis kolektoriumi, arba suminis žingsnis
inkaru)
yp
= y = Zk
e m = K 1p
± ± ;
Pirminis žingsnis yp1 2
= Ze ± ε; Antrinis žingsnis y2 = y- y1 ;
m – būtinai sveikas skaičius, matuojamas elementarių griovelių skaičiumi.
Jeigu m=1, gauname paprastą bangos apviją. Jeigu m>1, gauname sudėtinę bangos apviją. Išnagrinėsime paprastosios banginės apvijos schemos sudarymo
pavyzdį;
Bangos apvijai reikalingas ne bet koks griovelių skaičius, o toks , kad apvijos (rezultatinis) žingsnis išeitų sveikas skaičius.
I paprastosios banginės apvijos pavyzdys
Duota: Nuolatinės srovės keturpolė mašina 2p=4 turi paprastąją banginę apviją, susidedančią iš S
=13 sekcijų. Reikia nubraižyti išklotinę.

79Sprendimas: Apvijos žingsniai:
ypk = y = K 1 = 13 - 1
2= 6± ;apvijos žingsnis
Pirminis yp1 2
= Z = 134
- 14
= 3e ± ε ;
Antrinis y y2 = - y = 6 - 3 = 31 ;Sudarome sujungimų lentelę. Atstumas tarp šepečių: 13 / 4 =3,25 griovelio
• Apvija susideda iš 2 // šakų: 2a=2. Ši priklausomybė būdingai paprastajai banginei apvijai, kurioje lygiagrečių šakų skaičius, nepriklausomai nuo pagrindinių polių skaičiaus, mašinoje visada lygus2.
• Kiekvienos // šakos sekcijos tolygiai paskirstytos po visais mašinos
poliais; • Turint tokią apviją, užtektų 2 šepečių, pvz., BB1ir A1. Tačiau tada nebeliktų
apvijos simetrijos, nes // šakų sekcijų skaičius būtų nevienodas: vienoje šakoje 7 sekcijos, o kitoje – 6. Todėl dažniausiai mašinoje įrengiama tiek šepečių, kiek yra pagrindinių polių; tada sumažėja kiekvienam šepečiui
tenkantis srovės stipris ir kolektoriaus matmenys.
1 4/
7 10/
13 3/
6 9/
12 2/
5 8/
11 1/
4 7/
10 13/
3 6/
9 12/
2 58 111
• Pirmasis šepetys turės būti ten, kur elektrovara keičia ženklą. Tai ryškiausiai matosi ties 7 sekcija (7
kolektoriaus plokštelė). Kitas šepetys – už 3,25 kolektoriaus padalų.
1 2 3 4 5 6 7 8 9 10 11 12 13
3 2 4 5 6 7 8 9 10 11 12 13 1
B1A1
++- -3,25 3,25
Kiekvieno poliaus zonai tenka po ¼ visų griovelių skaičiaus (3,25)
3,25
A1
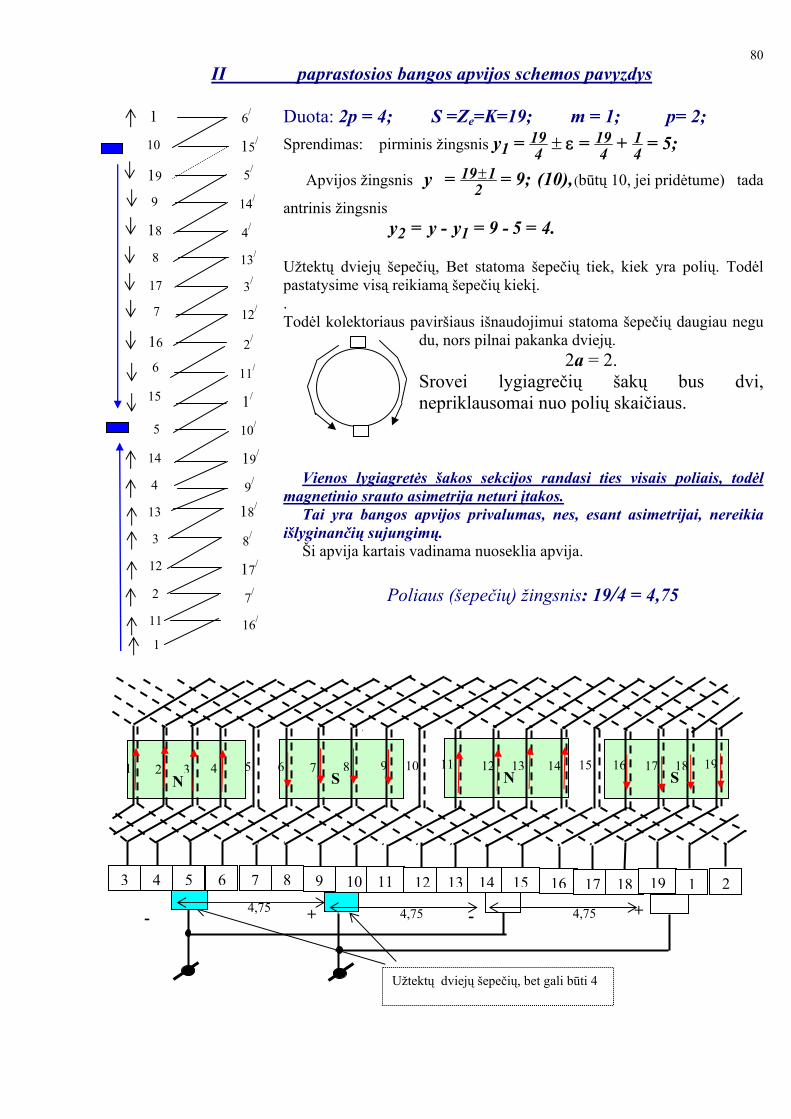
80II paprastosios bangos apvijos schemos pavyzdys
Duota: 2p = 4; S =Z =K=19; m = 1; p= 2; 1 6/
10 15/
19 5/
9 14/
18 4/
8 13/
e
y1 = = + =194
194
14± ε 5; Sprendimas: pirminis žingsnis
Apvijos žingsnis y = = 9; (10),19 12± (būtų 10, jei pridėtume) tada
antrinis žingsnis y2 1= y - y = 9 - 5 = 4.
Užtektų dviejų šepečių, Bet statoma šepečių tiek, kiek yra polių. Todėl pastatysime visą reikiamą šepečių kiekį. . Todėl kolektoriaus paviršiaus išnaudojimui statoma šepečių daugiau negu
du, nors pilnai pakanka dviejų. 2a = 2.
Srovei lygiagrečių šakų bus dvi, nepriklausomai nuo polių skaičiaus.
Vienos lygiagretės šakos sekcijos randasi ties visais poliais, todėl
magnetinio srauto asimetrija neturi įtakos. Tai yra bangos apvijos privalumas, nes, esant asimetrijai, nereikia
išlyginančių sujungimų. Ši apvija kartais vadinama nuoseklia apvija.
Poliaus (šepečių) žingsnis: 19/4 = 4,75
Užtektų dviejų šepečių, bet gali būti 4
2
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
6 7 8 9 10 11 12 13 14 15 16 17 18 19 15 4 3
- -+ +
N N S S
4,75
4,75 4,75
16
3/ 17
12/
2/
6 11/
7
1/
5 10/
14 19/
4
15
13
3
12
2
11 1
9/
18/
8/
17/
7/
16/
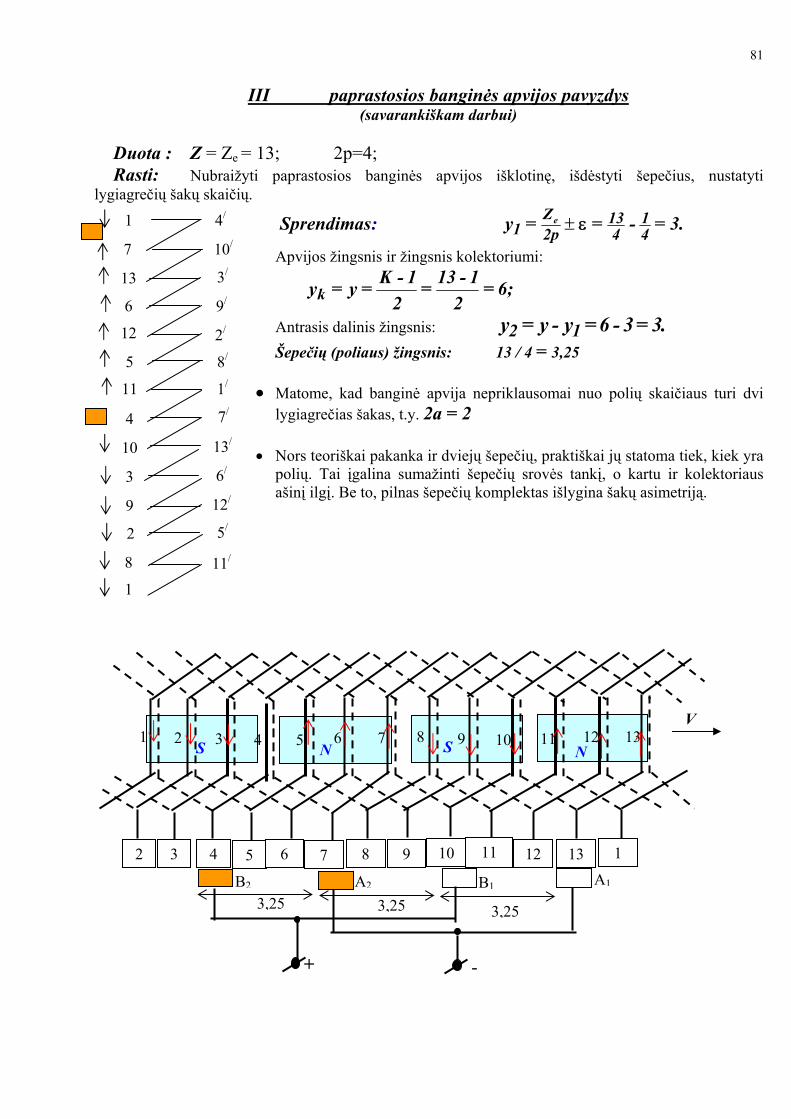
81
III paprastosios banginės apvijos pavyzdys (savarankiškam darbui)
Duota : Z = Z = 13; 2p=4; e Rasti: Nubraižyti paprastosios banginės apvijos išklotinę, išdėstyti šepečius, nustatyti
lygiagrečių šakų skaičių.
Sprendimas: y1 = = - =Z2p
134
14
e ± ε1 4/
7 10/
13 3/
6 9/
12 2/
5 8/
11 1/
4 7/
10 13/
3 6/
9 12/
2 5/
8 11/
1
3.
Apvijos žingsnis ir žingsnis kolektoriumi:
yk = y = K - 12
= 13 - 12
= 6;
Antrasis dalinis žingsnis: y2 = y - y =6 - 3 = 3.1Šepečių (poliaus) žingsnis: 13 / 4 = 3,25
• Matome, kad banginė apvija nepriklausomai nuo polių skaičiaus turi dvi lygiagrečias šakas, t.y. 2a = 2
• Nors teoriškai pakanka ir dviejų šepečių, praktiškai jų statoma tiek, kiek yra polių. Tai įgalina sumažinti šepečių srovės tankį, o kartu ir kolektoriaus ašinį ilgį. Be to, pilnas šepečių komplektas išlygina šakų asimetriją.
1 2 3 4 5 6 7 8 9 10 11 12 13 N N S S
V
4 5 6 7 8 9 10 11 12 13 1 3 2
B1B2 A2 A1
+ -
3,25 3,25 3,25

82
Sudėtinė banginė apvija
Kelios paprastosios banginės apvijos, sudėtos į vieno inkaro griovelius, sudaro sudėtinę banginę apviją. Kadangi paprastoji banginė apvija susideda iš 2 lygiagrečių šakų, tai sudėtinėje apvijoje lygiagrečių šakų skaičius
2a = 2m, m- kartotinumo koeficientas Šiuo atveju inkare išdėstyta m paprastųjų banginių apvijų. Šepečių plotis parenkamas taip, kad kiekvienas jų dengtų ne mažiau kaip m kolektoriaus plokštelių. Ši apvija apskaičiuojama taip pat, kaip ir paprastoji, tačiau apvijos žingsnį kolektoriumi surasti reikia
pagal formulę:
y = y =kK m
p± ;
I sudėtinės banginės apvijos pavyzdys
Duota: keturpolės mašinos 2p=4 inkare yra sudėtinė banginė apvija, susidedanti iš 2 paprastųjų
(m=2). Apvija susideda iš 18 vienavijų sekcijų: S=18 Nubraižyti išklotinę.
y124
= Z2p
= 184
= 4;e ± −εSprendimas: ieškome apvijos žingsnių: pirminis
y = y = K mp
= 18 - 22
= 8;k±
Antrinis žingsnis yApvijos žingsnis 2 = y - y = 8 – 4 = 4. 1
Sudarome apvijos sekcijų sujungimo lentelę:
• Iš pradžių susidėjo nelyginės sekcijos, po to –lyginės
1 5/
9 13/
17 3/
7 11/
15 1/
5 9/
13 17/
3 7/
15/
2 6/
10 14/
18 4/
8 12/
16 2/
6 10/
14 18/
4 8/
12 16/11
1 2
• Apvijos lygiagrečių šakų skaičius: • 2a = 2m = 4. • Poliaus (šepečių)žingsnis :
==p
S2
τ 18 / 4 = 4,5
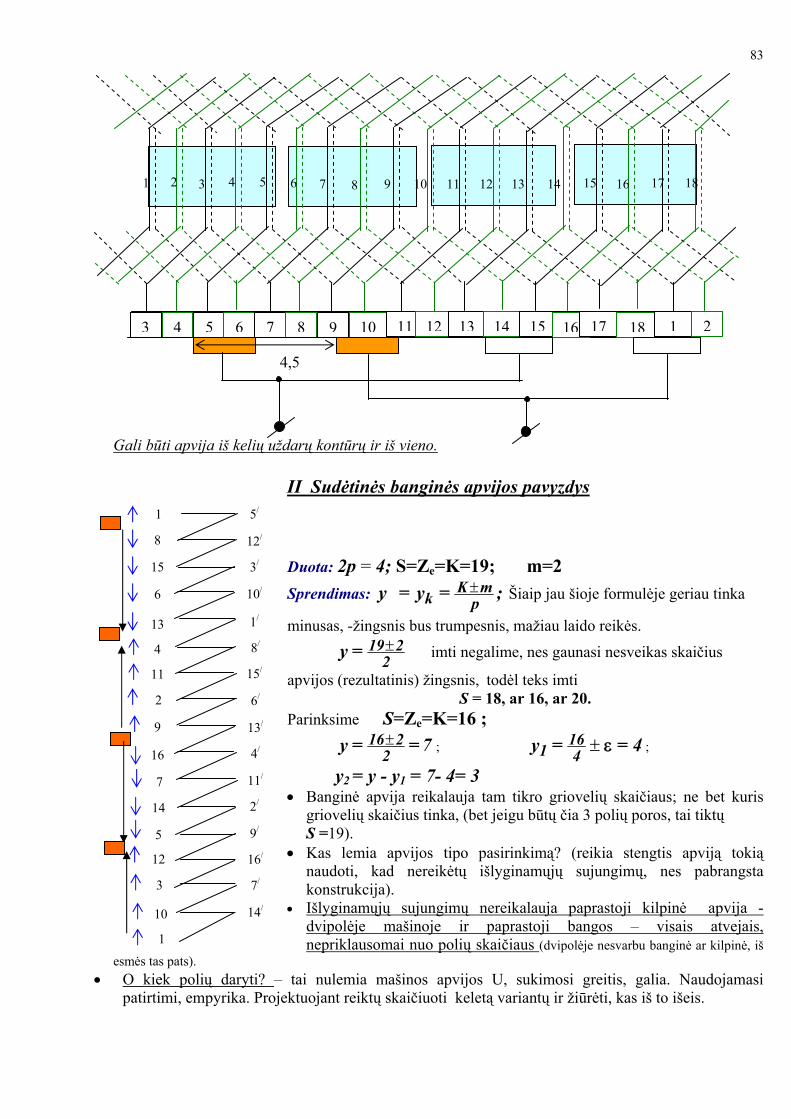
83 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 Gali būti apvija iš kelių uždarų kontūrų ir iš vieno.
II Sudėtinės banginės apvijos pavyzdys
Duota: 2p = 4; S=Ze=K=19; m=2
Sprendimas: y = y =kK m
p± ; Šiaip jau šioje formulėje geriau tinka
minusas, -žingsnis bus trumpesnis, mažiau laido reikės.
y = 19 22± imti negalime, nes gaunasi nesveikas skaičius
apvijos (rezultatinis) žingsnis, todėl teks imti S = 18, ar 16, ar 20.
Parinksime S=Ze=K=16 ;
y = = 716 22± ; y1 = =16
4 ± ε 4 ;
y2 = y - y1 = 7- 4= 3 • Banginė apvija reikalauja tam tikro griovelių skaičiaus; ne bet kuris
griovelių skaičius tinka, (bet jeigu būtų čia 3 polių poros, tai tiktų S =19).
• Kas lemia apvijos tipo pasirinkimą? (reikia stengtis apviją tokią naudoti, kad nereikėtų išlyginamųjų sujungimų, nes pabrangsta konstrukcija).
• Išlyginamųjų sujungimų nereikalauja paprastoji kilpinė apvija - dvipolėje mašinoje ir paprastoji bangos – visais atvejais, nepriklausomai nuo polių skaičiaus (dvipolėje nesvarbu banginė ar kilpinė, iš
esmės tas pats). • O kiek polių daryti? – tai nulemia mašinos apvijos U, sukimosi greitis, galia. Naudojamasi
patirtimi, empyrika. Projektuojant reiktų skaičiuoti keletą variantų ir žiūrėti, kas iš to išeis.
1 5/
8 12/
15 3/
6 10/
13 1/
4 8/
11 15/
2 6/
9 13/
16 4/
7 11/
14 2/
5 9/
12 16/
3 7/
10 14/
1
3 54 6 7 8 9 10 11 12 13 14 15 16 17 18 1 2
4,5

84Antra vertus, kodėl nevisada pasitenkinama tais 2 ( paprastoji kilpinė ir banginė) apvijų tipais?• Lemiantis kriterijus – apvijos srovės dydis. Paprastoji kilpinė- dvipolėje ir paprastoji banginė – nepriklausomai nuo polių kiekio turi 2 // šakas. Jei tikslinga 4 // šakų (6, ar net16) - nei viena nebetinka, tada rinksimės tokią, kuri turi daugiau // šakų (daugiapolėje – paprastoji kilpinė apvija, arba sudėtinė banginė ar net ir sudėtinė kilpinė) ; (dvipolėje - tik sudėtinė kilpinė apvija)
• Jeigu apvijos žingsnis y ir griovelių (sekcijų) skaičius S turi bendrą daliklį (>1) gauname tiek kartų
užsidarančią apviją, kiek yra tas daliklis. • Pakanka dviejų praplatintų šepečių, bet galima statyti ir pilną šepečių komplektą, kad geriau
išnaudoti kolektoriaus paviršių.
Lygiagrečių šakų gauname 4: 2a = 4;•
nes visuomet 2a = 2m
čia m - apvijos kartotinumo koeficientas Sudėtinėje banginėje apvijoje lygiagrečių šakų skaičius nuo polių skaičiaus
nepriklauso ( kilpinėje apvijoje buvo 2a = 2p m ir nuo polių skaičiaus priklauso)
Poliaus žingsnis (šepečių žingsnis) : 16/4 = 4 kolektoriaus padalų Čia bus 4lygiagrečios šakos
Na, o koks skirtumas tarp paprastosios ir sudėtinės banginių apvijų?
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 N N S S
4 5 6 7 8 9 10 11 12 13 14 15 16 1 3 2
4 4 4
Esminį skirtumą sudaro apvijos žingsnio formulė. Tuo pačiu skirsis ir lygiagrečių šakų kiekis. Paprastojoje banginėje jis visada lygus 2, na, o jei reikia daugiau, tai reikės daryti sudėtinę banginę apviją.
O kaip išoriškai jas atskirti? Tenka pilnai apeiti ratą ir jei grįžti į gretimą griovelį, tai bus paprastoji, o jei į tolimesnį, - tai bus
sudėtinė.
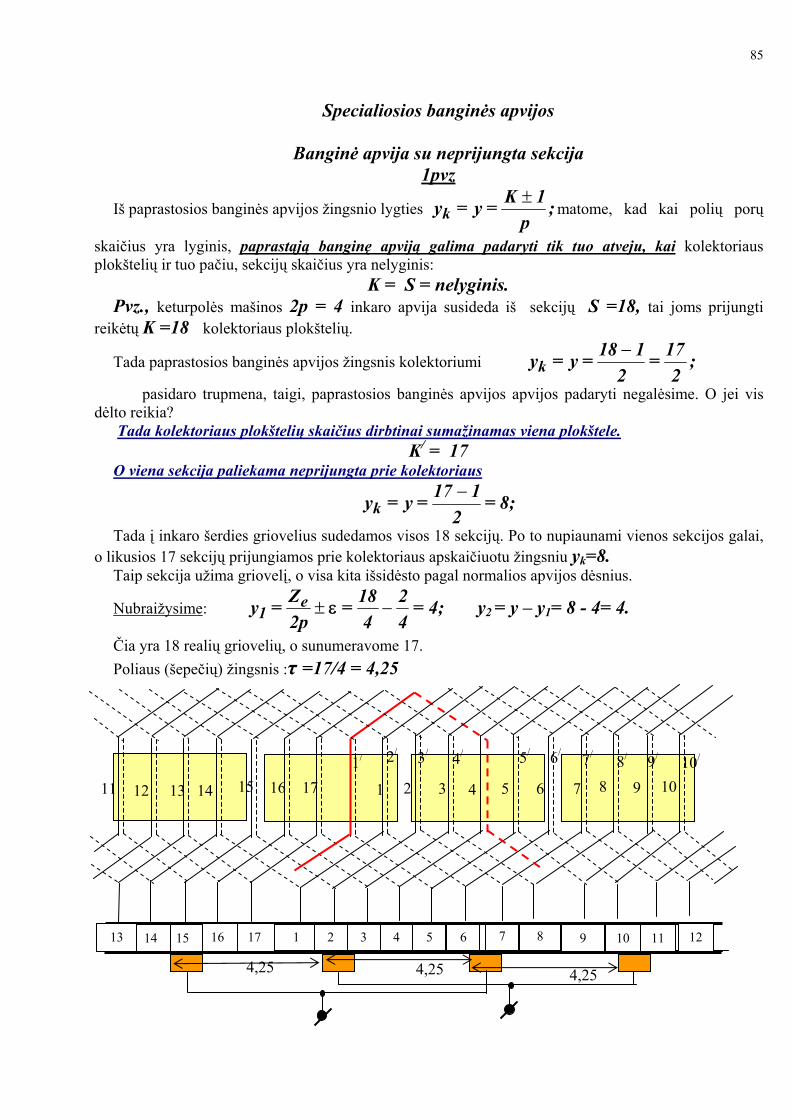
85
Specialiosios banginės apvijos
Banginė apvija su neprijungta sekcija 1pvz
Iš paprastosios banginės apvijos žingsnio lygties yk = y = K 1p
;±matome, kad kai polių porų
skaičius yra lyginis, paprastąją banginę apviją galima padaryti tik tuo atveju, kai kolektoriaus plokštelių ir tuo pačiu, sekcijų skaičius yra nelyginis:
K = S = nelyginis. Pvz., keturpolės mašinos 2p = 4 inkaro apvija susideda iš sekcijų S =18, tai joms prijungti
reikėtų K =18 kolektoriaus plokštelių.
yk = y = 18 12
= 172
;−Tada paprastosios banginės apvijos žingsnis kolektoriumi
pasidaro trupmena, taigi, paprastosios banginės apvijos apvijos padaryti negalėsime. O jei vis dėlto reikia?
Tada kolektoriaus plokštelių skaičius dirbtinai sumažinamas viena plokštele. K/ = 17
O viena sekcija paliekama neprijungta prie kolektoriaus
yk = y = 17 12
= 8;−
Tada į inkaro šerdies griovelius sudedamos visos 18 sekcijų. Po to nupiaunami vienos sekcijos galai, o likusios 17 sekcijų prijungiamos prie kolektoriaus apskaičiuotu žingsniu yk=8.
Taip sekcija užima griovelį, o visa kita išsidėsto pagal normalios apvijos dėsnius.
Nubraižysime: y Ze1 =
2p= 18
424
= 4;± −ε y = y – y = 8 - 4= 4. 2 1
Čia yra 18 realių griovelių, o sunumeravome 17. Poliaus (šepečių) žingsnis :τ =17/4 = 4,25
14 11 12 13 15 16 17 1 2 3 4 5 6 8 9 10 1/ 2/ 4/3/ 5/ 6/ 7/
7
8/ 9/ 10/
1 2 3 4 5 6 7 8 9 10 11 12 17 16 15 14 13
4,25 4,25 4,25
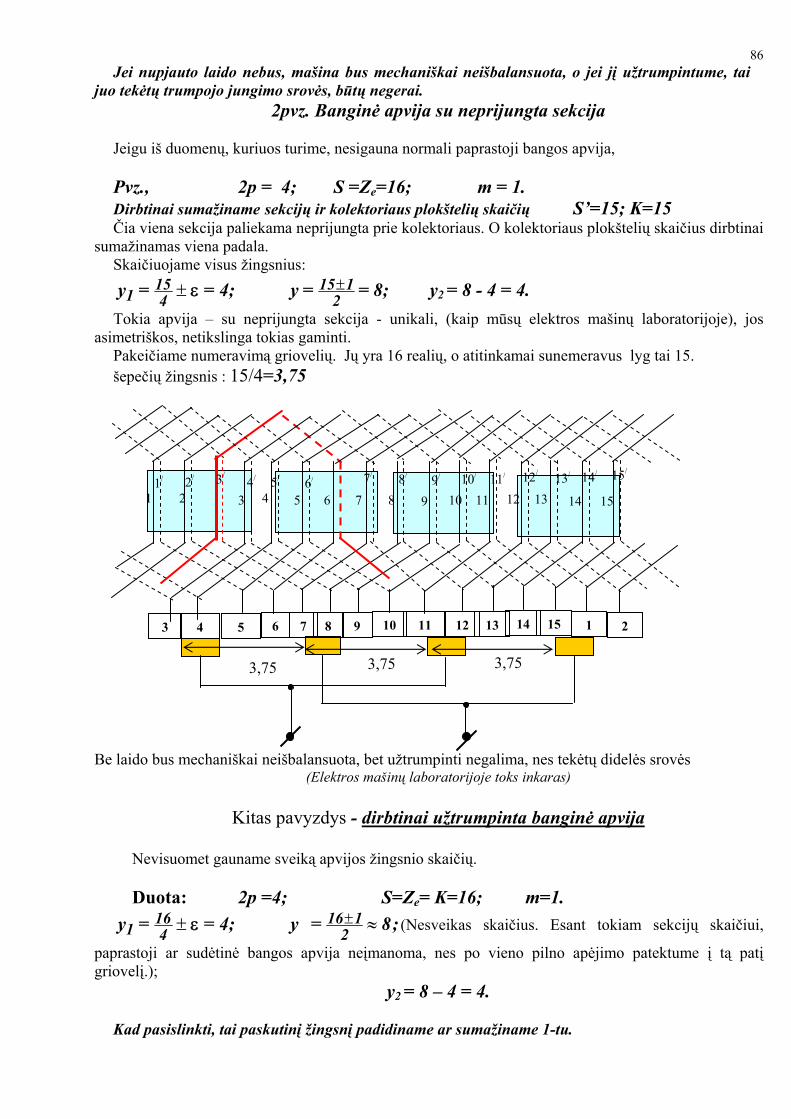
86Jei nupjauto laido nebus, mašina bus mechaniškai neišbalansuota, o jei jį užtrumpintume, tai
juo tekėtų trumpojo jungimo srovės, būtų negerai. 2pvz. Banginė apvija su neprijungta sekcija
Jeigu iš duomenų, kuriuos turime, nesigauna normali paprastoji bangos apvija, Pvz., 2p = 4; S =Z =16; m = 1. eDirbtinai sumažiname sekcijų ir kolektoriaus plokštelių skaičių S’=15; K=15 Čia viena sekcija paliekama neprijungta prie kolektoriaus. O kolektoriaus plokštelių skaičius dirbtinai
sumažinamas viena padala. Skaičiuojame visus žingsnius:
y = = 8;215 1±y1 4= =15 ± ε 4; y = 8 - 4 = 4. 2
Tokia apvija – su neprijungta sekcija - unikali, (kaip mūsų elektros mašinų laboratorijoje), jos asimetriškos, netikslinga tokias gaminti.
Pakeičiame numeravimą griovelių. Jų yra 16 realių, o atitinkamai sunemeravus lyg tai 15. šepečių žingsnis : 15/4=3,75
Be laido bus mechaniškai neišbalansuota, bet užtrumpinti negalima, nes tekėtų didelės srovės
1 2 3/
3 4 5 6 7 8 9 10 11 12 13 14 15
7
1/ 2/ 4/ 5/ 6/ 7/ 8/ 9/ 10/ 11/ 12/ 13/ 14/ 15/
8 9 10 11 12 13 14 15 1 6 54 3 2
3,75 3,75 3,75
(Elektros mašinų laboratorijoje toks inkaras)
Kitas pavyzdys - dirbtinai užtrumpinta banginė apvija
Nevisuomet gauname sveiką apvijos žingsnio skaičių. Duota: 2p =4; S=Z = K=16; m=1. e
y1 = =164 ± ε y = ;16 1
2± ≈ 84; (Nesveikas skaičius. Esant tokiam sekcijų skaičiui,
paprastoji ar sudėtinė bangos apvija neįmanoma, nes po vieno pilno apėjimo patektume į tą patį griovelį.);
y = 8 – 4 = 4. 2 Kad pasislinkti, tai paskutinį žingsnį padidiname ar sumažiname 1-tu.

87
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Nenormalūs žingsniai, apvija neužsidaro, todėl 1 ir 6/ sujungiami dirbtinai ir prijungiami prie 1
kolektoriaus plokštelės. Tokia apvija gali dirbti, bet akivaizdi asimetrija. Visos kitos savybės tokios pat, bet nepageidautina
asimetrija.
Apvijos simetrijos sąlygos
Nuolatinės srovės mašinų apvijos simetrijos sąlyga : lygiagrečios šakos turi turėti tas pačias elektrines savybes,- vienodą elektrinę varžą ir vienodą elektrovarą
.Nesimetrinėje inkaro apvijoje lygiagrečių šakų apkrovos srovė pasiskirsto nevienodai, o dėl to vienos šakos perkraunamos, o kitos apkraunamos nevisiškai. Perkrautos šakos labiau šyla, padidėja inkaro nuostoliai, sumažėja naudingumo koeficientas.
I sąlyga• : kiekviena lygiagrečių šakų pora turi susidėti iš vienodo sekcijų skaičiaus; Ši sąlyga bus išpildyta, jei kiekvienai // šakų porai teks sveikas sekcijų skaičius
Sa = N1; čia N1 – natūrinis (sveikas) skaičius;
Ir jei ši sąlyga nebus išpildyta, // šakų elektrinė varža ir EV bus nevienodos. • II sąlyga : Kadangi S = Ze ≥ Z, tai svarbu, kad kiekvienos lygiagrečių šakų poros sekcijos inkare
užimtų vienodą griovelių skaičių, t.y. Za = N1;
Čia Z – realių inkaro griovelių skaičius. • III sąlyga : Kiekviena lygiagrečių šakų pora turi užimti vienodą padėtį polių sistemos atžvilgiu, o tai
įmanoma tada, kai t.y. 2 pa = N1; (1)
Sudėtinei kilpinei apvijai 2a = 2 m p. Įrašę tai (1) lygtį, gauname:
;N== 1m2
pm2p2 =a
p(sveikas skaičius)
Vadinasi, sudėtinė kilpinė apvija gali būti simetrinė tiktai tada, kai m=2.
Išlyginantieji sujungimai
Nevisuomet pavyksta vienodai išdėstyti rotorių polių atžvilgiu. Netgi laikantis simetrijos sąlygų, inkaro apvijos lygiagrečių šakų elektrovaros daugiapolėse mašinose gali būti nevienodos. To priežastis yra magnetinė asimetrija, dėl kurios vienavardžių polių magnetiniai srautai yra nevienodi.

88Tai dėl to, kad jau gaminant elektros mašiną, atsiranda defektų: tuštumos lietuose stovuose, blogai
surinkti poliai, neteisingai centruotas inkaras, dėl to oro tarpai po poliais pasidaro nevienodi.
Asimetrija, statoriaus ir rotoriaus ašys nesutampa, nelygūs tarpeliai
Dėl asimetrijos susidaro uždara grandinė, teka srovė,kuri gali sutapti, gali nesutapti su išorine šepečių srove
1,2,3
Pvz, jei e1> e2, tai tekės srovė
e1
e2
A1
A2
B2 B1
Magnetinės asimetrijos įtaka mašinos darbui priklauso nuo inkaro apvijos tipo. Banginė apvija nejautri magnetinei asimetrijai. Banginėse apvijose kiekvienos lygiagretės šakos
sekcijos tolygiai išdėstytos po visais mašinų poliais, todėl čia lygiagrečių šakų EV yra vienodos, nežiūrint magnetinės asimetrijos, nes ji vienodai veikia visas lygiagretės apvijos šakas.
Sudėtingoj bangos apvijoje ta problema gali būti Kilpinėse apvijose kiekvienos lygiagrečios šakos sekcijos išdėstytos po viena polių pora, todėl
lygiagrečių šakų EV-varos pasidaro nevienodos dėl magnetinės asimetrijos. Tuomet lygiagrečiai sujungtų šepečių elektriniai potencialai taip pat tampa nevienodi – uždaroje išorinėje grandinėje ima tekėti išlyginimo srovės, kurios papildomai apkrauna šepečius. ( pvz., iš šepečio A į šepetį A1 2 (jei e1>e ) , o jei visose 4 inkaro apvijos šakose EV bus nevienoda, tai tai šios srovės tekės ir šepečių B – B2 1 2 grandine. (Atsižvelgiant į apvijos varžą, - srovės gana didelės). Šios srovės, susidėdamos su apkrovos srove, netolygiai apkrauna lygiagrečias šakas, dėl to perkaista apvija, tai iššaukia šepečių kibirkščiavimą ir pirmalaikį susidėvėjimą, padidėja elektriniai nuostoliai. Be to, po kai kuriais šepečiais padidėja srovės tankis, viršydamas leistiną, dėl to kibirkščiuoja kolektorius. Kad nebūtų šepečių perkrovimo,
paprastųjų kilpinių apvijų taškai, kurių daromi išlyginantieji sujungimai inkaro apvijos viduje - elektriniai potencialai turi būti vienodi, sujungiami tarpusavyje elektriškai. Šiuo atveju išlyginimo srovės tekės apvijos viduje, neapkraudamos šepečių ir juos jungiančių šynų.
Išlyginančios srovės stipris nepriklauso nuo mašinos apkrovos. Todėl ši srovė neišnyksta ir t.v.
režime, kai I =0. Tai trikdo mašinos darbą. aTada apvijoje atsirandančios išlyginančiosios srovės tekės apvijos viduje, neištekėdamos į šepečius ir
juos jungiančias šynas. pirmosios rūšies išlyginamaisiais Šie sujungimai daromi iš varinių laidų ir yra vadinami
sujungimais. Galima jungti tarpusavyje: • Sekcijų galus, prijungiamus prie kolektoriaus plokštelių • (arba) galinės apvijos dalis priešingoje kolektoriui pusėje. • Bet sujungimai komplikuoja konstrukciją, reikia papildomai laidų, todėl geriau nenaudoti
kilpinės apvijos daugiapolėje mašinoje. (Dvipolėje mašinoje tokios problemos nėra.) Lygiagrečių šakų elektrovarų skirtumas gali būti nedidelis, pvz., 201 V; 199 V; skirtumas 2 V:
201-199=2 V; Bet srovė gausis gana didelė, atsižvelgiant į apvijos varžą. Pvz., U=2V, R=0,1Ω, I=2/0,1=20A.
Sudėtinėse kilpinėse ir banginėse apvijose lygiagrečiai sujungiamos per kolektoriaus ir šepečių kontaktą paprastosios apvijos, kurios sudaro sudėtinę. Praktiškai sunku pasiekti, kad kiekviena paprastoji apvija sudarytų vienodą šepečių ir kolektoriaus kontaktą, todėl srovė tarp paprastųjų apvijų pasiskirsto netolygiai
Šiems reiškiniams pašalinti naudojami antrosios rūšies išlyginantieji sujungimai, kuriais paprastųjų
apvijų vienodų potencialų taškai sujungiami tarpusavyje elektriškai.
89Svarbiausias skirtumas eksploatacijai yra : Lygiagrečių šakų skaičius. Kilpinei apvijai: 2a
y=S mp±Banginei apvijai: 2a =2m
Patarimai, parenkant apvijos rūšį: • Geriausia naudoti paprasčiausią apviją. Pvz., dvipolei mašinai gerai tinka paprastoji kilpos apvija. • Kilpinėje apvijoje skirtingų lygiagrečių šakų sekcijos atsiduria ties viena polių pora ir todėl
reikalingi išlyginantieji sujungimai ; • Banginei apvijai tik sudėtinei reikalingi II rūšies išlyginantieji sujungimai • Daugiapolei mašinai ir kilpinei sudėtinei apvijai reikalingi dvejopi išlyginamieji sujungimai • Panašiai yra, jeigu apvija sudėtinė kilpinė arba banginė, tolygesniam srovių pasiskirstymui
reikalingi išlyginamieji sujungimai Praktinį apvijos tipo parinkimą nulemia išlyginamųjų sujungimų reikalingumas!•
Jeigu labai didelės srovės mašinoje, tai naudinga turėti daugiau lygiagrečių šakų. Paprastai Ia≤ 200 ÷ 300 A. O jei daugiau, tai teks naudoti daugiapolę mašiną. Tada naudotina būtų
paprastoji bangos apvija. Bet jeigu nepakanka skerspjūvio, tai naudojama sudėtinė (lygiagrečių šakų padidinimui). (Tik
didelės galios mašinose tikslinga panaudoti mišriąją apviją.)
Mišrioji apvija (Latūro)
Didelės galios mašinose naudojama mišrioji apvija. Ji sudaryta iš kilpinės ir banginės apvijų, sudėtų į tuos pačius griovelius ir prijungtų prie bendro kolektoriaus. Skirtingai nuo kilpinės arba banginės, mišrioji klojama 4 sluoksniais. Jos abi dirba lygiagrečiai. Tam reikia, kad lygiagrečių šakų kiekis tiek kilpos, tiek bangos turi būti vienodas. Prie kiekvienos kolektoriaus plokštelės prilituojami 2 laidininkai.
2ak=2ab
Todėl 2p yk=2m, kai p>1. Todėl yk=1 paprastoji kilpos apvija... Tada p = m sudėtinga bangos apvija Pasirodo, kad bangos apvijos sekcija sujungia tarpusavyje kilpos apvijos sekcijas taip, kad bangos
apvija tarnauja išlyginančiais sujungimais kilpos apvijai. Ir atvirkščiai. Todėl papildomų išlyginančiųjų sujungimų nereikia daryti.
Dirbtinai uždaryta banginė apvija
Daroma tada, kai dėl mašinos parametrų yra reikalinga banginė apvija, o inkaro griovelių ir kolektoriaus plokštelių yra tiek, kad jos padaryti neįmanoma.
Pvz., keturpolės mašinos 2p=4;inkaro griovelių skaičius Z=12; o kolektorius susideda iš K=12 plokštelių. Tada paprastosios banginės apvijos padaryti negalima, nes
yk = 12 - 12
≠ nelygu sveikam skaičiui;
Paprastąją banginė apviją padaryti būtų galima, jeigu ji susidėtų iš 13 sekcijų, o kolektorius iš 13 plokštelių:
yk = 13 - 12
= 6;
Bet inkare yra tik 12 griovelių, o kolektorius turi tik 12 plokštelių, todėl galima išdėstyti ant šerdies ir prijungti prie kolektoriaus tik 12 sekcijų. Šiuo atveju ir daroma dirbtinai uždaryta banginė apvija iš 12

90sekcijų, o trūkstamoji 13-ta sekcija ir kolektoriaus plokštelė pakeičiama laidininku, kuriuo uždaroma apvija.
Skaičiuojant dirbtinai uždarytos banginės apvijos žingsnius, atsižvelgiama į tai, kad inkaro šerdyje yra vienu grioveliu daugiau, o kolektorius turi viena plokštele daugiau, lyginant su jų tikruoju skaičiumi.
Taigi, mūsų pavyzdyje skaičiuojant apvijos žingsnius,, reikia imti Z=13; K=13;
y1 = 134
- 0,25 = 3; y = y = = = 6;kK -1
213-1
2Tada apvijos žingsniai:
y = y-y = 6-3 = 3. 2 1 Braižant apviją, reikia atsiminti, kad kiekvieną kartą, apeinant inkarą, kai sudedama p sekcijų, šių
sekcijų žingsniai kolektoriumi kaitaliojami: vienos sekcijos žingsnis daromas pilnas, (yk), o kitos – sutrumpinamas vieno kolektoriaus padala:
y/ = yk k-1 = 6-1 = 5; Sekantį kartą apeinant inkarą, sekcijų žingsniai vėl kaitaliojami. Sudėjus paskutinę sekciją, jos galas
laidininku sujungiamas su pirmosios sekcijos pradžia.
1 2 3 4 5 6 7
NUOLATINĖS SROVĖS MAŠINŲ NUOSTOLIAI IR NAUDINGUMO KOEFICIENTAS
Čia kalbama apie energijos nuostolius. Galios nuostolių nereikia painioti su įtampos kritimu.
Nuostoliai turi atspindėti galios tam tikrą netekimą. Energijos keitimas visuomet surištas su energijos nuostoliais.
Visada P1> P2; η = ;PP
2
1
Nuostolių galią pavadinsime P - P = P;1 2 Δ∑ Skiriami nuostoliai:
• Elektriniai; • Magnetiniai; • Mechaniniai; • Papildomi.
Elektriniai nuostoliai - yra visose elektrinėse grandinėse, kuriomis teka srovė:
ΔPe = RI 2 ; Skiriami: inkaro apvijos varžoje, šepečių kontakto, be to, visose kitose apvijose (nuoseklaus
žadinimo, papildomų polių apvijos).
8 9 10 12 11

91Lygiagretaus arba svetimo žadinimo apvijoje nuostoliai bus pastovūs, o visi kiti – kintamieji.
Skaičiuojant elektrinius nuostolius, reikia atsižvelgti į apvijų varžos priklausomybę nuo temperatūros, nes apvijų varža pastebimai priklauso nuo temperatūros.
Gryniems metalams : 0,004 / 10 0 C; arba 0,4% /1 C Paprastai nuostoliams skaičiuojama temperatūra 750C. Jei žinoma, imama tikslesnė reikšmė. Galios nuostoliai magnetinėje grandinėje. Juos gauname tuomet, kai magnetinis srautas kinta
feromagnetinės medžiagos viduje. Nuostoliai inkaro magnetolaidyje. Magnetolaidžio sluoksniavimas sumažina tik sūkurines sroves. Šiek tiek yra nuostolių polių galūnėse nuo inkaro magnetolaidžio dantytumo. (Nepainioti magnetinės
įtampos kritimo oro tarpuose). Jeigu magnetinės įtampos analogas yra įtampa, tai magnetinę srovę - magnetinio srauto kitimo greitį
galime laikyti analogiška elektrinei srovei: ddtΦ = a ; (”magnetinė srovė” ) Tada F a = p;
čia F – magnetovara, a - magnetinė srovė; p – galia. Kadangi inkaro magnetolaidyje srautas kinta, tai atsiranda ir srovės analogija. Nuostoliai skaičiuojami pagal magnetolaidžio masę, Φ kitimo greitį. Žinynuose duodami savitieji
nuostoliai. Mechaniniai nuostoliai atsiranda dėl trinties guoliuose, šepečių trinties. Magnetiniai ir mechaniniai nuostoliai pastovūs, nepriklauso nuo mašinos apkrovos srovės.
papildomų nuostoliųPrie priskiriami visi antraeiliai nuostoliai, kuriuos nevisada žinome. Inkaro reakcijos, srovės komutacijos.
Vidutinės galios mašinose nuostoliai priimami 1% nuo galios, jei nėra kompensacinės apvijos, ir 0,5 %, jei ji yra.(tik galingose mašinose ji dedama)
Δ Δ Δ Δ ΔP P Pmg mech p∑ P+ + += Pe ;
Galime skaičiuoti naudingumo koeficientą:
;P
P=P
=2
2
1
1
∑∑
Δ+
Δ−
PPP
η
varikliui generatoriui Varikliui P – mechaninę galią būtų sunkiau išmatuoti., generatoriui – priešingai. 2Mums, elektrikams patogiausia matuoti elektrinę galią, o ne mechaninę. Mažos galios mašinose naudingumo koeficientas žemesnis, vidutinės ir didelės galios – didesnis.
Visa nuostolių galia virsta šiluma (pagrindinai). Todėl mašinos kaista.
MAŠINŲ ĮŠILIMAS IR AUŠINIMAS
Įšilimas yra natūralus reiškinys. Leistiną darbo temperatūrą nulemia izoliacijos savybės. Bet visi kiti mašinos mazgai gali dirbti ir prie aukštesnių temperatūrų.
Leistiną izoliacijos temperatūrą nustato izoliacijos klasės. A klasės 105 0C. Izoliacijos darbo amžius, neviršijant leistinos temperatūros turi siekti 15 metų. Kartu tai apsprendžia
mašinos amžių. Po tokio laiko atliekamas mašinos kapitalinis remontas, kurio metu keičiama apvija. 0C mašinos amžių sutrumpina dvigubai. Temperatūros viršijimas virš leistinos 8
Todėl net ir trumpalaikis temperatūros pakilimas žymiai viršijant leistiną trumpina mašinos darbo amžių, ypač aukštos įtampos mašinose.
. Įšilimo procesas vyksta pagal pagrindines termodinamikos taisykles. Išsiskiriant tam tikram šilumos
kiekiui prie tam tikros temperatūros nusistovi balansas ir toliau mašinos temperatūra nekyla. Jei tik yra

92temperatūrų skirtumas, vyksta šilumos mainai. Temperatūra nusistovi tada, kai išsiskiriamos šilumos kiekis susilygina su atiduodamu.
Praėjus 3-4 laiko konstantoms, pasiekiama nusistovėjusi temperatūra Θ.
Mašina, nors ir nevienalytė, bet jos įšilimas visvien keičiasi pagal eksponentę. Laiko konstanta priklauso nuo mašinos galios. Pagal tai, kaip kinta temperatūra, mašinos darbo režimas skirstomi į: ilgalaikį; trumpalaikį; trumpalaikį kartotinį.
Θ
ΘT T
t laikas
Leistina temperatūra
Ilgalaikis darbo režimas toks, kuomet įjungus mašiną, ji dirba tiek ilgai, kad temperatūra pasiekia nusistovėjusią reikšmę:
Θ∞ ≤ Θleistiną. Trumpalaikis darbo režimas toks, kai temperatūra nespėja pasiekti nusistovėjusios reikšmės, t.y. ji
atjungiama ir mašina spėja ataušti. Jeigu mašina dirba pagal tokį režimą, mes
mašiną galime perkrauti (trumpą laiką).
Θ
Θleistina
Td
t
Mes iš tos pačios mašinos galime gauti didesnę galią.
Trumpalaikis kartotinis darbo režimas toks, kai periodiškai cikliškai kartojasi mašinos įjungimo ir atjungimo ciklai. Pauzės trukmė tokia, kad mašina nespėja ataušti iki pradinės temperatūros.
IT = TT
100% dc
Θ
Θleistina
Tc
t
Td Tp
, čia ĮT – įjungimo trukmė

93MAŠINŲ AUŠINIMO BŪDAI
Natūralus ir dirbtinis aušinimas. Natūralus tai toks, kai mašinoje nėra specialių įrenginių, padidinančių šilumos atidavimą aplinkai. Tai naudojama mažos galios mašinose, nes jose yra dideli santykiniai paviršiai ir jų pakanka
natūraliam mašinos aušinimui. Dirbtinis: savaiminis ir nepriklausomas. Kai aušinančio oro srautą sukuria ventiliatorius ant pačios mašinos veleno – savaiminis. Nepriklausomas aušinimas - tai toks, kai mašiną aušina specialus ventiliatorius, nepriklausantis nuo
mašinos darbo. Jeigu mašina uždara, vienas ventiliatorius viduje, o išorinis aušina korpusą.(apipučia) Kuo didesnės galios mašina, tuo sunkiau sprendžiamas aušinimo klausimas. Nuolatinės srovės mašinoms (ribinės galios apie 10.000 kW), nepakanka natūralaus aušinimo, dar
reikia ir priverstinio aušinimo, ypač jei greitis valdomas: jei jis pats suka savo ventiliatorių, tai prie mažų greičių pasidaro neefektyvus savas aušinimas.
. Kintamosios srovės didelės galios mašinų korpusas užpildomas vandeniliu (uždaras korpusas). H2
geriau perneša šilumą ir mažesni aerodinaminiai nuostoliai. Gali būti labai galingų mašinų labiausiai kaistančios dalys - apvijos (vamzdeliai) aušinamos
destiliuotu vandeniu (dielektrikas). Jeigu tos pačios galios mašina daugiau kaista, tai reiškia, kad mažesnių gabaritų mašina gali atiduoti
didesnę galią. Dabar leidžiama mašinoms įkaisti iki 1500C tik reikia apsaugos, kad neprisiliesti.

94TRANSFORMATORIAI
Transformatorius (T)– statinis elektros įrenginys, skirtas elektros srovės parametrams keisti (paaukštinti ar pažeminti įtampą, sustiprinti ar susilpninti srovę). Čia nedalyvauja mechaninė energija – nėra judamų viena kitos atžvilgiu judamų dalių. Veikimas pagrįstas elektromagnetinės indukcijos reiškiniu- abipuse indukcija tarp apvijų. Bendra visų transformatorių galia yra keletą kartų didesnė negu visų mašinų, nes perduodant elektros energiją, tenka keletą kartų keisti elektros srovės parametrus.
Transformatorių išsivystymas susijęs su kintamosios srovės vystymusi. Būtent galimybė keisti kintamosios srovės parametrus nulėmė kintamosios srovės paplitimą.
Elektrinėse generatoriai gamina elektros energiją su įtampa U<24kV, nes esant didesnėms įtampoms, iškyla sunkumai su izoliacija. Perduoti elektros energiją dideliais atstumais esant tokiai, palyginti, žemai įtampai, ekonomiškai neapsimoka dėl didelių nuostolių linijoje (P=UIcosϕ, ta pati galia gaunasi prie didesnės srovės, dėl to padidėja galios nuostoliai laiduose (I2R), t.y. dėl to tektų didinti laidų skerspjūvį). Todėl elektros stotyse galios T pakelia U iki110, 220; 330,500; 750,1150 kV. Na, o vartotojams vėl T pagalba U pažeminama keliais etapais: 35(10) kV; 10(6)kV; 380/220V.
Istorija: 1889 Dolyva-Dobrovolskis pasiūlė trifazį T bei AV. Pastebimas tam tikras grįžimas prie nuolatinės srovės. Pvz., perduodant kintamąją srovę perduodama galia
proporcinga efektinei kintamosios srovės reikšmei. O izoliacija turi išlaikyti amplitudinę reikšmę. Tuo tarpu nuolatinė srovė neturi padidintos amplitudės.
Skiriami: Galios transformatoriai (energetiniai, didelės galios: trifaziai virš 6,3 kVA, vienfaziai virš 5
kVA,) matavimo transformatoriai; suvirinimo transformatoriai; mažų galių transformatoriai (atskiriems aparatūros vienetams maitinti); pagal dažnį – pramoninio ir aukštesnio dažnio.
Sandara: Transformatorių magnetolaidžiai: atlieka dvi funkcijas:1) sudaro magnetinę grandinę srautui užsidaryti; 2) ant jo tvirtinamos apvijos, jų išvadai, perjungikliai. Jie gaminami iš elektrotechninio plieno lakštų. Šis plienas (su Si priedu iki 4%) turi didelį magnetinį laidį ir mažą liekamąjį magnetinio srauto tankį B. To pasėkoje gaunama:
• didelis magnetinis srautas prie mažų magnetovarų; • siaura histerezės kilpa ir todėl maži histerezės (galios) nuostoliai pliene. • Magnetolaidžio lakštai, apie 0,5 mm storio, („šichtuoti“), oksiduojami arba padengiamu plona
izoliacine plėvele. Lakštų sąlyčio vietoje yra didelė elektrinė varža. Dėl to bus silpnos sūkurinės srovės, tuo pačiu maži šių srovių sukelti galios nuostoliai. Taigi, sluoksniavimas apsaugo nuo sūkurinių srovių.
Transformatoriaus apvijos:
Ant transformatoriaus magnetolaidžio šerdžių užmaunami izoliaciniai cilindrai, ant jų vyniojamos apvijos (sklaidos srauto sumažinimui pirminė ir antrinė apvijos dedamos ant tos pačios šerdies.) Transformatoriaus apvijos gaminamos iš apvalaus ir stačiakampio skerspjūvio izoliuotų varinių ar aliuminio laidų.
Izoliacija:
Izoliacinis cilindras gaminamas iš kabelinio popieriaus, suklijuoto bakelitiniu laku.Šis cilindras įveržiamas mediniais kaiščiais, įspraudžiamais tarp magnetolaidžio šerdies ir cilindro sienelės. Taip sumažėja vibracijos bei triukšmai. Dar naudojama tarpvijinė izoliacija, izoliacija tarp apvijos sluoksnių, tarp apvijos ričių ir magnetolaidžio. Magnetolaidis įžeminamas. Transformatoriaus magnetolaidis su apvijomis gali būti patalpintas į metalinį baką su transformatorine alyva, kuri aušina ir izoliuoja apvijas. Tai – alyviniai transformatoriai.

95Daugiausia čia naudojamos A izoliacinės klasės (1050C) medžiagos: transformatorinė alyva,
kabelinis popierius, elektrokartonas, medvilnė, baltasis ir raudonasis bukas, beržas. Transformatoriaus veikimas
Transformatoriaus veikimui išaiškinti nagrinėjamas vienfazis dviejų apvijų transformatorius.
Veikimas pagrįstas abipuse indukcija (čia kaip procesas) tarp T apvijų. Ta apvija, kuri jungiama prie srovės šaltinio, vadinama pirmine ir žymima su indeksu “1”,o prie kurios jungiasi apkrova - antrine ir žymima su indeksu “2”. Šis skirstymas – sąlyginis. (pvz. Kruonio hidroakumuliacinė elektrinė. Naktį
energija nukreipta į vieną pusę, dieną – į kitą. Žymėjimas transformatorių:
Pradžioje nagrinėsime idealizuodami realų T,
kuriame nepaisome apvijos varžų ir yra pilnas magnetinio srauto ryšys tarp wI ir w2 apvijų.
Pirminė apvija prijungiama prie tinklo, kurio įtampa u1. Pirmine transformatoriaus apvija teka srovė i1, kuri
sukuria magnetinį srautą Φ, susietą su abiem apvijomis.
Φ i1 35kV
10kV 110kV
u
u2 w2 e2
1 w1 e1 F1
F2
Pvz, energiją “gaudo” 2 apvijos
i2
Jei pirminės ir antrinės apvijų vyniojimo kryptis ta pati, tai srautas Φ apvijose indukuoja (remiantis elektromagnetinės indukcijos dėsniu) tos pačios krypties EV-varas e1 ir e2. Jei prie antrinės grandinės prijungta apkrova, tai antrinės grandinės generatorinė EV e sukurs srovę i2 2. Šios srovės sukurtas magnetinis srautas bus išmagnetinantis ir veiks prieš pagrindinį magnetinį srautą Φ. Srovės i2
išmagnetinantį veikimą kompensuos srovės i1 prieauglis, dėl to srautas Φ praktiškai liks beveik nepakitęs. Kiekvienam apvijos kontūrui galioja II Kirchhoffo dėsnis: u1 = e1; u = e2 2;
Atsižvelgiant į teigiamas kryptis, šių EV išraiškos:
e = w ddt1 1Φ ; e = w d
dt2 2Φ ;
uu
ee
12
12
≅ = ww
= k12
Santykis vadinamas transformacijos koeficientu.
Aukštinančio transformatoriaus: k<1; Žeminanančio : k>1; Jeigu paneigti nuostolius, (būtų P1 = P2), tai galioja lygybė:
ii
= uu
1k
12
21≅u1i1 = u2 i2; Iš čia santykis:
Apvijoje su didesniu vijų skaičiumi Srovės apvijose pasiskirsto atvirkščiai proporcingai įtampoms!teka mažesnė srovė ( ir atvirkščiai)
Panagrinėsime realų transformatorių:
Realus T skiriasi nuo idealaus štai kuo:
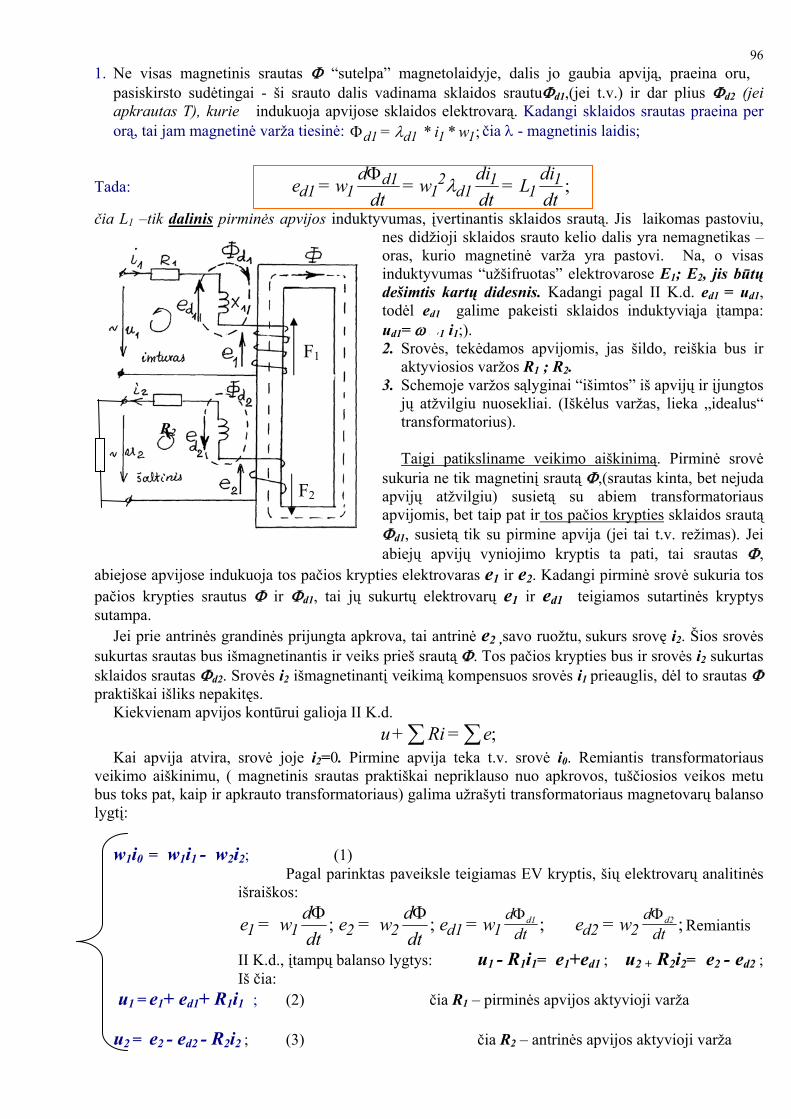
961. Ne visas magnetinis srautas Φ “sutelpa” magnetolaidyje, dalis jo gaubia apviją, praeina oru,
pasiskirsto sudėtingai - ši srauto dalis vadinama sklaidos srautuΦd1,(jei t.v.) ir dar plius Φd2 (jei apkrautas T), kurie indukuoja apvijose sklaidos elektrovarą. Kadangi sklaidos srautas praeina per orą, tai jam magnetinė varža tiesinė: Φd1 d1 1 1= * i wλ * ; čia λ - magnetinis laidis;
Tada: e = w ddt
= w didt
= L didtd1 1
d112
d11
11Φ
λ ;
čia L1 –tik dalinis pirminės apvijos induktyvumas, įvertinantis sklaidos srautą. Jis laikomas pastoviu, nes didžioji sklaidos srauto kelio dalis yra nemagnetikas – oras, kurio magnetinė varža yra pastovi. Na, o visas induktyvumas “užšifruotas” elektrovarose E1; E2, jis būtų dešimtis kartų didesnis. Kadangi pagal II K.d. ed1 = ud1, todėl ed1 galime pakeisti sklaidos induktyviąja įtampa: ud1= ω L1 i1;). 2. Srovės, tekėdamos apvijomis, jas šildo, reiškia bus ir
aktyviosios varžos R1 ; R2. 3. Schemoje varžos sąlyginai “išimtos” iš apvijų ir įjungtos
jų atžvilgiu nuosekliai. (Iškėlus varžas, lieka „idealus“ transformatorius). Taigi patiksliname veikimo aiškinimą. Pirminė srovė
sukuria ne tik magnetinį srautą Φ,(srautas kinta, bet nejuda apvijų atžvilgiu) susietą su abiem transformatoriaus apvijomis, bet taip pat ir tos pačios krypties sklaidos srautą Φd1, susietą tik su pirmine apvija (jei tai t.v. režimas). Jei abiejų apvijų vyniojimo kryptis ta pati, tai srautas Φ,
abiejose apvijose indukuoja tos pačios krypties elektrovaras e1 ir e2. Kadangi pirminė srovė sukuria tos pačios krypties srautus Φ ir Φd1, tai jų sukurtų elektrovarų e1 ir ed1 teigiamos sutartinės kryptys sutampa.
Jei prie antrinės grandinės prijungta apkrova, tai antrinė e2 ,savo ruožtu, sukurs srovę i2. Šios srovės sukurtas srautas bus išmagnetinantis ir veiks prieš srautą Φ. Tos pačios krypties bus ir srovės i2 sukurtas sklaidos srautas Φd2. Srovės i2 išmagnetinantį veikimą kompensuos srovės i1 prieauglis, dėl to srautas Φ praktiškai išliks nepakitęs.
Kiekvienam apvijos kontūrui galioja II K.d. u+ Ri = e∑ ∑ ;
Kai apvija atvira, srovė joje i2=0. Pirmine apvija teka t.v. srovė i0. Remiantis transformatoriaus veikimo aiškinimu, ( magnetinis srautas praktiškai nepriklauso nuo apkrovos, tuščiosios veikos metu bus toks pat, kaip ir apkrauto transformatoriaus) galima užrašyti transformatoriaus magnetovarų balanso lygtį:
w1i0 = w1i1 - w2i2; (1)
Pagal parinktas paveiksle teigiamas EV kryptis, šių elektrovarų analitinės išraiškos:
e = w ddt1 1Φ ; e = w d
dt2 2Φ ; e = wd1 1
ddt
d1Φ ; e = wd2 2d
dtd2Φ ; Remiantis
II K.d., įtampų balanso lygtys: u1 - R1i1= e1+ed1 ; u2 + R2i2= e2 - ed2 ; Iš čia:
u1 = e1+ ed1+ R1i1 ; (2) čia R1 – pirminės apvijos aktyvioji varža u2 = e2 - ed2 - R2i2 ; (3) čia R2 – antrinės apvijos aktyvioji varža
R2
F1
F2

97
Lygtys 1, 2, 3 – vadinamos pagrindinėmis transformatoriaus lygtimis. Jos yra transformatoriaus atstojamųjų schemų ir vektorinių diagramų pagrindas.
Transformatoriaus elektrovara
Tarkime, kad transformatoriaus pirminės apvijos sukurtas magnetinis srautasΦ yra sinusinis
(kintantis laiko atžvilgiu): Φ = Φ sin ω t ; (1) m 1
Šis srautas veikia transformatoriaus apvijas ir jose indukuoja elektrovaras:
e = w = w t1 1ddt 1 1 m 1Φ
Φω ωcos ;
e = E sin t21 m1 1ωπ
+⎛⎝⎜
⎞⎠⎟;Šią lygtį galima perrašyti taip: (2)
Maksimali pirminės apvijos elektrovara Em1 = 2π f1 w1 Φm ;
E = E2
= 4,44 f w ;1m1
1 1 mΦEfektinė pirminės apvijos elektrovara:
Atitinkamai antrinės apvijos elektrovara: E = 4,44 f2 1 w2 Φ . m
0elektrovara pralenkia 90Palyginus (1) ir (2) lygtis, matyti, kad kampu srautą, kuris ją indukuoja. Dydžius, kintančius sin dėsniu, galima užrašyti simboliškai (kompleksiškai) (tada nereikia operuoti
amplitudinėmis vertėmis, galima ir efektinėmis). Taigi, ryšys tarp magnetinio srauto ir elektrovaros (vadovėliuose gali būti kitokie ženklai, bet tai tik
ženklų sistemos pasirinkimo klausimas) E = j ω1 1 Φ; E = j ω2 2 Φ;
Lygtys, atstojamoji schema ir vektorinės diagramos
Pagrindinis srautas priklauso nuo magnetovaros, kurią sukuria pirminė ir antrinė apvijos. Todėl magnetovarų balanso lygties
w1I0 = w1I1 - w2I2; abi puses padalinkime iš w1:
I = I + I ww
;1 0 221
I = I + I 1k
;1 0 2 (1) srovių balanso lygtis
I IIš čia seka, kad į srovę 1 galima žiūrėti, kaip susidedančią iš dviejų dedamųjų: viena jų 0
apsprendžia pagrindinį magnetinį srautą Φ, o antra Ik2 kompensuoja antrinės apvijos srovės
išmagnetinantį poveikį. I Tuščiosios veikos srovė sudaro tik keletą % srovės 1N. Ją paneigus, iš (1) seka, kad apvijų srovės
(apytikriai) atvirkščiai proporcingos vijų skaičiui: (Lygybė būtų, jei būtų I0 = 0)
;k;1
2
2
1
1
2
2
1II
ww
k1
ww
II ≈==≈ (viską rašome žeminančiam T)

98Iš šios formulės seka, kad apvijoje su didesniu vijų skaičiumi teka mažesnė srovė.
Toliau užrašysime įtampų balanso lygtis kompleksine forma:
U = E + E + R I ;1 1 d1 1 1
U = E - E - R I ;2 2 d2 2 2
Elektrovarą Ed1 atsveria įtampos kritimas pirminės apvijos sklaidos induktyviojoje varžoje X1, o elektrovarą Ed2 atsveria įtampos kritimas antrinės apvijos sklaidos induktyviojoje varžoje X2:
E = jXd1 1 I1 ; E = jXd2 2 I2; Tada galime perrašyti įtampų balanso lygtis: U1 = E1 + jX1I1+R1I1; (2) U2 = E2 - jX2I2 – R2I2; (3) Šias (1),(2),(3) lygtis atitinka atstojamoji schema:
Z2
Čia ryšys tarp pirminės ir antrinės apvijų – magnetinis. Šiose apvijose srautas Φ indukuoja
elektrovaras E1 ir E2 Apvijų sklaidos induktyviosios varžos X ir X1 2, o aktyviosios R ir R . 1 2
. Pirmine apvija teka srovė IPrie pirminės apvijos gnybtų prijungta įtampa U1 1. Antrine grandine, ją apkrovus, tekėtų srovė I2. Matome pažymėtas sąlygines EV kryptis.
Pavaizduosime bendro pavidalo vektorinę diagramą, atitinkančią (1),(2),(3) lygtis. • Atskaitos vektorius – pagrindinis magnetinis
srautas, (kurio didumas
I2’=I2/k
R-L apkrova
φ1
φ2 δ
U1
jx1I1
R1I1
E1
E2
Φ
I1
-R2I1
-jx2I2
ΦmE
4,44fw= 1
1; )
0• E ir E kampu. 1 2 pralenkia srautą 90• Įmagnetinimo srovė I0 pralenkia srautą Φ dėl to,
kad realus transformatoriusturi nuostolius, tai nuostolių kampas δ.
• I2 kampas priklauso nuo apkrovos pobūdžio. Čia pasirinkome R-L, todėl I2/k atsilieka kampu ϕ 2 nuo E . 2
• Srovė I braižoma kaip suma I ir I /k. Srovė I1 0 2 1 atsilieka nuo įtampos U1, nes transformatorius naudoja reaktyviąją galią dėl I ir nuostolių. 0
• Gavome k ≈ 4,8. Kai transformacijos koeficientas k pakankamai
didelis, E1 ir E dydžiai smarkiai skiriasi. 2
Šiuo atveju vektorinę diagramą braižyti nelabai patogu, todėl kartais geriau naudoti redukuotojo (perskaičiuoto) transformatoriaus lygtis, atstojamąją schemą ir vektorinę diagramą.

99Redukuotojo transformatoriaus parametrai
Redukuotu transformatoriumi vadinamas toks, kurio antrinė apvija sąlygiškai pakeista nauja apvija, turinčia tiek pat vijų, kiek jų yra pirminėje apvijoje, o nuostoliai ir galia nepakitę. Tada transformacijos koeficientas k’= 1
Jei naujosios apvijos, turinčios vijų skaičių w2’= w , parametrai žymimi : E ’; I ’; R ’; X1 2 2 2 2’, tai galima
užrašyti, kad E ’= E . 2 1
Tada el-magnetinę schemą galima supaprastinti, sujungiant vienodų potencialų taškus a1 ir a2, b1 ir b . Galima užrašyti, kad transformacijos koeficientas 2
1;==k2
/2
2
1EE
EE =
Tuomet ;Ek =E 22
/
Iš redukuoto T apibrėžimo Iš čia: E I = E I ;2'
2'
2 2
I = ;2' I
k2
’ ’ 2Naudojantis galios nuostolių pastovumo sąlyga: R2 (I2 ) = R2I22; Ir kadangi: k = I2/I2
’ ;
’R2 = k2 ’R2 Analogiškai: X = k2X2 2
Redukuotojo transformatoriaus parametrai naudojami pagrindinėms lygtims, atstojamajai schemai ir vektorinei diagramai sudaryti. Realius dydžius randame iš redukuotų atitinkamai perskaičiuodami.
Redukuotojo transformatoriaus lygtys
Redukuotojo transformatoriaus parametrus įrašius į įtampų balanso lygtis, gausime redukuotojo
transformatoriaus įtampų balanso lygtis, U = E + jX I R I1 1 1 1 1 1+ ;
U = E - jX I R I2'
2'
2 2 2 2' ' ' ';−
Dabar prisiminkime srovių balanso lygtį:
I = I + I 1k
;1 0 2 iš čia: I = I -Ik0 12 ; I = I - I0 1 2' ; arba
Pastebime, kad redukavimas I lygties nepakeičia, II-je - atsiranda štrichai; na, o III-čia pasikeičia iš esmės. Bet visgi pastebėkime, kad II tam tikra prasme pasikeičia, E ’ tampa lygi E . 2 1
Pagal šias lygtis nubraižome atstojamąją schemą. Vienodų potencialų taškai sujungti į a ir b.
Za’
Čia srovių teigiamos kryptys pasirinktos laisvai. Čia kaip taikant I K.d.. Pasirenkame, o atsakymas parodys, ar gerai.
Redukuotojo transformatoriaus schema neturi magnetinio ryšio elementų tarp pirminės ir antrinės grandinių.

100Arba paprasčiau (varžų dedamąsias pakeitus kompleksinėmis varžomis) - turėsime „T“ pavidalo atstojamąją schemą: Ji susideda iš 3 šakų: • a b – įmagnetinimo šaka. Šios šakos
srovė I
I1
I0
U1
Z1 Z2’
E1= E2’ U2
’I2
’
Z0 Za’(apkrovos
a
b
priklauso ne vien tik nuo elektrovaros E , bet ir nuo šios šakos varžų R ir X0 1 0 0. Jos abi sudaro įmagnetinimo šakos kompleksinę varžą Z0.
Z0 = R0 + jX ; 0
Įtampos kritimą šioje varžoje, tekant srovei I0 atsveria elektrovara E1:
’E1 = E = Z I2 0 0 ; 2Aktyvioji galia varžoje R0 atitinka magnetinių nuostolių galią: P0 = R0 I . 0
• Pirminė šaka su varža Z1= R1 + jX ir srove I ; 1 1 ’ ’ ’• Antrinė šaka su varža Z2 = R2 + jX2 ir srove I2
’ ;
R-L ’Keičiant apkrovos varžą Za , atstojamojoje schemoje
galima gauti visus transformatoriaus darbo režimus Visi atstojamosios schemos parametrai, išskyrus Za
’, yra pastovūs dydžiai ir gali būti nustatyti t.v. ir tr. j. bandymais. Reiškinių nagrinėjimas pačiame transformatoriuje dažnai pakeičiamas lengvesniu nagrinėjimu palyginti paprastoje redukuotojo T atstojamojoje schemoje. Rezultatų tikslumas priklauso nuo atstojamosios schemos parametrų nustatymo tikslumo.
Iš redukuotojo transformatoriaus schemos gali būti gauta srovių balanso lygtis, taikant I Kirchhoffo dėsnį mazgui a arba b: I1= I0 +I2
’; Šiai elektrinei schemai nubraižysime vektorinę diagramą
aktyviajai- induktyviajai (R-L) apkrovai. Toliau bus nagrinėjamas tik redukuotas T.
Nubraižysime vektorinę diagramą aktyviajai apkrovai (R).
Braižymo seka: • Laisvai pasirenkama U2
’ ir, žinant, kad srovė turi
sutapti faze su įtampa, nubrėžiama srovė I2’;
• Iš įtampų balanso lygties: E2’= U2
’+ R2’I2
’ +jX2’I2
’; - sumuojame įtampų kritimus srovės I2
’atžvilgiu ir gauname E2
’= E1; • Brėžiame srautą Φ, 900 kampu atsiliekantį nuo
E1;(savo masteliu) • Brėžiame I0, nedideliu nuostolių kampu δ pralenkiančią
srautą Φ. • Turėdami I0 ir I2
’, pagal srovių balanso lygtį galime rasti I1 = I0 + I2
’; • dabar jau yra atskaitos vektorius I1, galėsime ieškoti U1
= E1 + R1I1 + jX1I1
=E2’
I2’
U2’
R2’I2
’
X2’I2
’
E1=E2’
Φ I0
I1
R1I1jX1I1
U1
R
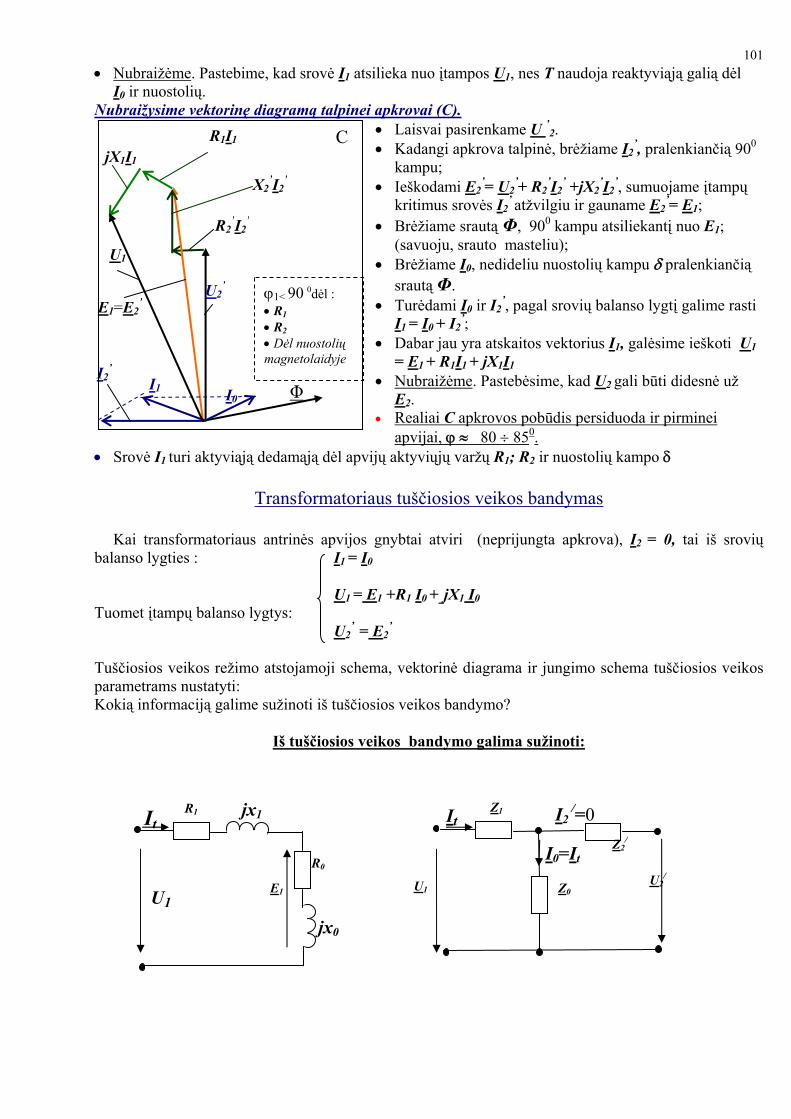
101• Nubraižėme. Pastebime, kad srovė I1 atsilieka nuo įtampos U1, nes T naudoja reaktyviąją galią dėl
I0 ir nuostolių. Nubraižysime vektorinę diagramą talpinei apkrovai (C).
’• Laisvai pasirenkame U . 2
• Kadangi apkrova talpinė, brėžiame I2’, pralenkiančią 900
kampu; • Ieškodami E2
’= U2’+ R2
’I2’ +jX2
’I2’, sumuojame įtampų
kritimus srovės I2’ atžvilgiu ir gauname E2
’= E1; • Brėžiame srautą Φ, 900 kampu atsiliekantį nuo E1;
(savuoju, srauto masteliu); • Brėžiame I0, nedideliu nuostolių kampu δ pralenkiančią
srautą Φ. • Turėdami I0 ir I2
’, pagal srovių balanso lygtį galime rasti I1 = I0 + I2
’; • Dabar jau yra atskaitos vektorius I1, galėsime ieškoti U1
= E1 + R1I1 + jX1I1 • Nubraižėme. Pastebėsime, kad U2 gali būti didesnė už
E2. • Realiai C apkrovos pobūdis persiduoda ir pirminei
apvijai, ϕ ≈ 80 ÷ 850. • Srovė I1 turi aktyviąją dedamąją dėl apvijų aktyviųjų varžų R1; R2 ir nuostolių kampo δ
Transformatoriaus tuščiosios veikos bandymas
Kai transformatoriaus antrinės apvijos gnybtai atviri (neprijungta apkrova), I2 = 0, tai iš srovių
balanso lygties : I1 = I0
U1 = E1 +R1 I0 + jX1 I0Tuomet įtampų balanso lygtys: U2
’ = E2’
Tuščiosios veikos režimo atstojamoji schema, vektorinė diagrama ir jungimo schema tuščiosios veikos parametrams nustatyti: Kokią informaciją galime sužinoti iš tuščiosios veikos bandymo?
Iš tuščiosios veikos bandymo galima sužinoti:
I2’
U2’
R2’I2
’
X2’I2
’
E1=E2’
Φ I0I1
R1I1
U1
C jX1I1
ϕ1< 90 0dėl : • R1 • R2 • Dėl nuostolių magnetolaidyje
U1
U2/
It R1 jx1
R0
jx0
E1 U1
Z1
Z0
I0=It
It I2 /=0
Z2/

102
U1
It ≈ I0A W
Pt ≈ P0
VU20
V V U1
Dėl srauto nuostolių magnetolaidyje, nes srovė-tik keli % nuo nominalios
Φ
E1 =E2’= U2
I0 =It
RtI0
U1 jxtI0
1.Transformacijos koeficientą. Voltmetrai: Pirminė apvija prijungiama prie nominaliosios U1N;
Pirmasis voltmetras rodys įtampą U1N; antrasis – antrinės grandinės nominalią įtampą U20. Iš to
galima sužinoti transformacijos koeficientą k ;UU
1N
20≅
2. Tuščiosios veikos srovę. Ampermetras rodys t.v. srovę It (tai santykinė įmagnetinimo šakos srovė, ji
tesudaro vos kelis % nuo nominaliosios srovės) i = 100(%);tI
It
1N
3. Atstojamosios schemos varžas.Voltmetro ir ampermetro būdu nuolatine srove galima būtų nustatyti ominę apvijų varžą R . Antroji varža R1 0 – nuostoliai magnetolaidyje. Aktyviajai varžai nustatyti reikalingi ampermetro ir vatmetro rodmenys.
;IP=RR=R 2t
t01t +Aktyvioji tuščiosios veikos varža Z
Pilnoji tuščiosios veikos varža ;I
U=Z0
1Nt Z = R jX = Z + Z Z ;t t t 1 0 0+ ≅
Induktyvioji sklaidos t.v. varža ;RZ=X 2t
2tt −
Praktiškai R1 < R0; ir X1<<<X0; Aktyvioji varža didesnė už ominę dėl nuostolių magnetolaidyje.
4. Tuščiosios veikos galios nuostolius. Vatmetras rodys aktyviąją galią, (pliene, magnetolaidyje, tai magnetiniai nuostoliai – jie proporcingi įtampos kvadratui P0 ≡ U1
2) ; Visa tuščiosios veikos galia praktiškai padengia nuostolius magnetinėje grandinėje. P Pt m≈ Δ ;
Nubraižysime tuščiosios veikos ch-kų pobūdį. It=f(U1); Pt=f(U1); cos ϕt=f(U1); (parabolės). Kodėl krenta cosφ? cosφ krenta, nes tai nulemia srautas Φ, kuriam magnetinė varža
netiesinė (magnetolaidžiu srauto linijos užsidaro). Ji keičiasi, keičiant U, jai augant, prisisotina, auga nuostoliai. Čia negalioja Omo (Ohmo) dėsnis, todėl ir srovė netiesinė, parabolė.
Redukuoto transformatoriaus atstojamosios schemos antrinės grandinės parametrai nustatomi
atliekant trumpojo jungimo bandymą.
1<< Z0
Grubiai vertinant

103Transformatoriaus trumpojo jungimo bandymas
Trumpasis jungimas yra toks transformatoriaus darbo režimas, kai antrinė apvija yra sujungta
trumpai, o antrinė įtampa U2 = 0. Jeigu eksploatacijos metu įvyksta trumpasis jungimas, tai išauga neleistinai didelės I1 ar I2 srovės. Tačiau, bandant, mes galime ramiausiai atlikti trumpojo jungimo bandymą, žinodami, kad bandymo srovės neturi viršyti nominalių srovių ir įtampų.
Transformatoriaus trumpojo jungimo režimas gaunamas trumpai sujungus (per ampermetrą) antrinę grandinę.
Pirminės grandinės įtampa iš lėto didinama tol, kol srovė antrinėje grandinėje pasiekia vardinę vertę
A W
V AU1tr
I1tr I2N
U1tr
I1tr Z2
’
Z0
I2N’
I0
Z1
“T” pavidalo atstojamoji schema
U parenkama tokia, kad (I1 1tr ≈ I1N ) srovės neviršytų nominalių. Pirminės grandinės įtampa Utr , kurią prijungus, antrinėje trumpai sujungtoje apvijoje teka vardinė
srovė I2N, vadinama trumpojo jungimo įtampa. Ji dažnai reiškiama %. Trumpojo jungimo atvejui pagrindinės T lygtys :
U1tr = E1 + R1 I1tr + jX1 I1tr ; U2tr
’ = 0 = E2
’ – R2’ I2N
’ - jX2
’ I2N’ ;
I0 = I1tr – I2N’; (kadangi t.v. srovė
I0 labai silpna, jos galima nepaisyti.) Tada I1tr = I2N’;
Į tai atsižvelgus, nubraižoma vektorinė diagrama, trumpojo jungimo įtampų trikampis, o kraštines
padalinus iš srovės I1tr, gaunamas trumpojo jungimo varžų trikampis.
U2tr=0
X2’ I1tr
’
Φ
E1=E2’
I1tr=I2N’
R1I1tr
jX1I1tr U1tr
R2’ I1tr
RtrI1tr
jXtrI1trk U1tr
Rtr
jXtr
Ztr
ϕtr ϕtr
Trumpojo jungimo atstojamosios transformatoriaus varžos: Rtr= R1+R2
’
X tr= X1+X2’
Ztr= Rtr+jXtr Taigi, atlikus trumpojo jungimo bandymą, nustatomi trumpojo jungimo parametrai ir nubraižoma
trumpojo jungimo vektorinė diagrama bei atstojamoji schema.

104Sudarius trumpojo jungimo trikampį, lengviau nagrinėti transformatoriaus darbą; o trumpojo
jungimo parametrų nustatymo tikslumas susijęs su transformatoriaus analizės tikslumu.
Trumpojo jungimo parametrų nustatymas
Φ
I1tr
RtrI1tr
jXtrI1tr U1tr
U1tr
I1tr Rtr jXtr
Iš trumpojo jungimo bandymo galima sužinoti: 1. Transformacijos koeficientą
k = II2tr1tr
;
2. Trumpojo jungimo įtampą 0 (keli % UN
( )u = UU
100trtr1
; %
3. Trumpojo jungimo galią, (kurią parodo vatmetras) P Ptr el≈ Δ ;
Kadangi t.v. srovės I praktiškai nepaisome, tai nepaisome ir T magnetinių galios nuostolių P0 m. Aktyvioji galia, kurią rodo vatmetras, yra T elektrinių nuostolių (apvijose) galia. Kadangi įtampa maža, tai nuostolių magnetolaidyje beveik nebus, o apvijose tekės nominalios srovės, todėl čia gausime nuostolius apvijose – elektrinius nuostolius (vario nuostolius P ). Cu
P1tr= RtrI1tr2
4. Trumpojo jungimo varžas
Voltmetro-ampermetro būdu nuolatine srove nustatomos ominės varžos R1 ir R2. (Kol dar neužtrumpinta). Toliau, tekant kintamajai srovei:
Galima apskaičiuoti:
R = PI
tr1tr
1tr2 ; (iš vatmetro ir ampermetro rodmenų); R2
’=Rtr – R1;
Kadangi U1tr= ZtrI1tr, tai Z = UI
tr1tr
1tr; ir X = Z R ;tr tr
2tr
2−
Ztr ≈ Z1+Z2
’ ; Galime sužinoti, kam bus lygi
Z ZZ21 2
' tr≈ ≈ ;
nes apvijų varžos beveik vienodos, jei apvijos užima maždaug tą patį tūrį. (bendru atveju), jei nežinome konkretesnių duomenų. (Tai priklauso nuo apvijų konstrukcijos, galios) . Iš t.v. bandymo galime rasti Z0 ≈ Zt – Z1;
“T” pavidalo apytikslė atstojamoji schema turi nedidelį skaičių elementų. Bet galima sudaryti dar paprastesnę”Γ ” (gama, graikiškai) pavidalo schemą:
Ši schema atitinka * schemą (8psl.). O pagal šią schemą transformatoriaus tyrimas trumpojo jungimo režime nėra tikslus, nes I1 pasirodytų didesnė, nei iš tikrųjų. Bet tarpiniame - darbo režime ji yra tikslesnė už trumpojo jungimo atvejį,bet ne taip tiksli kaip tuščiosios veikos metu. Panaudojus pataisos koeficientą, padidinus Ztr , gausime tikslią srovės reikšmę.
U
Itr
U1
I1 Ztr
Zt
I2’
It
U2’ Z’
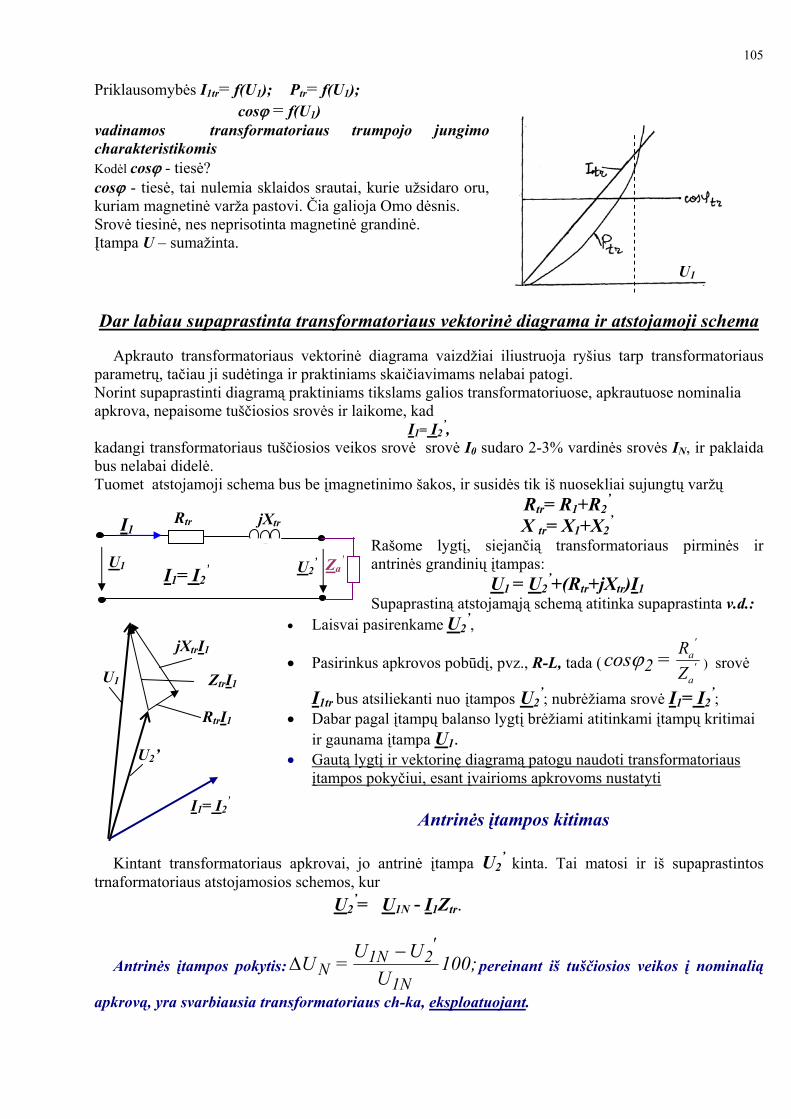
105 Priklausomybės I1tr= f(U = f(U); P ); 1 tr 1
cosϕ = f(U ) 1vadinamos transformatoriaus trumpojo jungimo charakteristikomis
U1
Kodėl cosϕ - tiesė? cosϕ - tiesė, tai nulemia sklaidos srautai, kurie užsidaro oru, kuriam magnetinė varža pastovi. Čia galioja Omo dėsnis. Srovė tiesinė, nes neprisotinta magnetinė grandinė. Įtampa U – sumažinta.
Dar labiau supaprastinta transformatoriaus vektorinė diagrama ir atstojamoji schema
Apkrauto transformatoriaus vektorinė diagrama vaizdžiai iliustruoja ryšius tarp transformatoriaus
parametrų, tačiau ji sudėtinga ir praktiniams skaičiavimams nelabai patogi. Norint supaprastinti diagramą praktiniams tikslams galios transformatoriuose, apkrautuose nominalia apkrova, nepaisome tuščiosios srovės ir laikome, kad
’I1= I , 2kadangi transformatoriaus tuščiosios veikos srovė srovė I sudaro 2-3% vardinės srovės I0 N, ir paklaida bus nelabai didelė. Tuomet atstojamoji schema bus be įmagnetinimo šakos, ir susidės tik iš nuosekliai sujungtų varžų
Rtr= R1+R2’
Za’U2
’ U1
I1Rtr jXtr
I1= I2’
X tr= X1+X2’
Rašome lygtį, siejančią transformatoriaus pirminės ir antrinės grandinių įtampas:
U1 = U2’+(Rtr+jXtr)I1
Supaprastiną atstojamąją schemą atitinka supaprastinta v.d.: ’
• Laisvai pasirenkame U , 2
U2’
I1= I2’
RtrI1
U1
jXtrI1
ZtrI1
cos =2RZ
a'
a'ϕ• Pasirinkus apkrovos pobūdį, pvz., R-L, tada ( ) srovė
I1tr bus atsiliekanti nuo įtampos U2’; nubrėžiama srovė I1= I2
’; • Dabar pagal įtampų balanso lygtį brėžiami atitinkami įtampų kritimai
ir gaunama įtampa U1. • Gautą lygtį ir vektorinę diagramą patogu naudoti transformatoriaus
įtampos pokyčiui, esant įvairioms apkrovoms nustatyti
Antrinės įtampos kitimas
Kintant transformatoriaus apkrovai, jo antrinė įtampa U2’ kinta. Tai matosi ir iš supaprastintos
trnaformatoriaus atstojamosios schemos, kur U2
’= U1N - I1Ztr.
ΔU = U UU
100;N1N 2
'
1N
−Antrinės įtampos pokytis: pereinant iš tuščiosios veikos į nominalią
apkrovą, yra svarbiausia transformatoriaus ch-ka, eksploatuojant.

106Kad vartotojas gautų reikiamą įtampą, perdavimo linijose svarbu įtampos pokytis. Yra leidžiamos
tam tikros ribos. Antrinės įtampos U2 priklausomybė nuo srovės I vadinama transformatoriaus išorine 2ch-ka:
U = f(I2 2)
Šios kreivės forma priklauso nuo T apkrovos pobūdžio
.
Trifaziai transformatoriai
Trifazes sroves ir įtampas galima transformuoti, naudojant tris vienfazius transformatorius. Toks transformatorius vadinamas grupiniu. Jis yra simetriškas (tiek apkrautas tiek ir ne)
Jei grupinio transformatoriaus magnetolaidžio dalis
be apvijų sujungtume į vieną, tai tos dalies srautas, esant simetrinei sistemai
Φ Φ ΦA B C+ + = 0 ;
Magnetolaidžio dalis, kurioje magnetinio srauto nėra – nereikalinga. Taip sujungus, gaunamas trifazis transformatorius su bendru magnetolaidžiu.
Toliau galima vidurinę dalį išmesti. Gauname
trišerdį magnetolaidį. Tokie trifaziai šerdiniai transformatoriai žymiai
patogesni, lengvesni ir pigesni, todėl plačiai paplitę. Jeigu maitinimo įtampos ir apkrova simetriniai, tai
kiekviena fazė elgiasi vienodai, kaip ir vienfazis. Todėl nėra reikalo kiekvienai fazei braižyti vektorių
diagramas, galima pasitenkinti ir viena. Kai apkrova nesimetrinė, vaizdas skiriasi.
Trišerdis T
Šerdis
Jungas
Trumpesnis Φ kelias
Trifazių transformatorių įmagnetinimo srovės
Trišerdžio transformatoriaus įmagnetinimo srovių asimetrija
Toks trišerdis transformatorius yra truputį asimetriškas. Taip gavosi tuomet, kai vidurinįjį magnetolaidį sutrumpinome. B faze srautas praeina trumpesnį kelią, o kraštinių fazių magnetolaidžiai ilgesni, taigi, ir įmagnetinimo srovės didesnės, kad gauti tą patį srautą Todėl tam pačiam srautui sukurti vidurinėje fazėje reikės truputį mažesnės magnetovaros, negu kraštinėse. Ir

107 I = I > I .
Ao Co Bo
Srovės nelygumą matome srovių vektorių išsidėstyme. Normaliai tuščiosios veikos srovės turėtų būti simetrinės, ypač atvejui, kai nėra neutraliojo laido, srovių vektorinė suma privalo būti lygi = 0. Taigi, jei yra asimetrija ir nėra neutraliojo laido, turi pasikeisti ir fazės dydis taip,
kad vektorinė suma išliktų = 0. Gaunasi nesimetrinės srovės, o galios – dar labiau nesimetrinės.
α
IBo
ICo IAo
α
Taigi, kai pirminė trišerdžio T-riaus apvija sujungta žvaigžde be neutraliojo laido Y /... :
I + I + I = 0; Ao Bo Co
Jei ϕAt > ϕBt >ϕCt ; tai susidaro paradoksas, kad PAt< PBt< PCt Galias nulemia kampai, ten kur kampas minimalus,
ten galia maksimali. Jei yra neutralusis laidas, arba apvijos sujungtos
trikampiu, bus kitaip (sudėtingai). Todėl, atliekant tokio transformatoriaus tuščiosios
veikos bandymą, reikia matuoti visų fazių galias. Kai tokį transformatorių apkrauname simetrine
apkrova, ši asimetrija pradingsta, ir neturi žymesnės įtakos į transformatoriaus darbą.
UA
UC
ICo
UB
IAo
IBo
ϕCt
ϕAt≈900; Pa≈0
ϕBt
δ
Labiau aktyvi srovė
Įmagnetinimo srovės (tuščiosios veikos srovės) aukštesnės harmonikos
Jau kalbėjome anksčiau, kad jei įtampa U – sin, elektrovara EV turėtų atsverti įtampą U, tada ir
srautas privalo būti artimas Φ - sin , tik atsiliekantis nuo EV 900 kampu. Tuščiosios veikos metu pirminės apvijos srovė lygi t.v. srovei;
i1 = i . 0
Jei tiksliau, srautą Φ kuria, tuo pačiu ir T-riaus magnetolaidį įmagnetina t.v. srovės reaktyvioji dedamoji i0r. Dėl T-riaus plieno sotinimo srautą kurianti rovė i0r ir srautas Φ kinta skirtingai.
Vienfazio T įmagnetinimo srovės
kreivę matome paveiksle.
t
t
Φ Φ=f(t)
Φ=f(i0r) • I-me kvadrante – T-riaus įmagnetinimo kreivė Φ=f(i0r). Ji atspindi T-riaus sotinimą, kurį rodo kreivės netiesiškumas, bet neįvertina magnetinių galios nuostolių. Į juos atsižvelgsime kiek vėliau.
i0r
• II-me kvadrante – srauto kitimo kreivėΦ=f(t). Magnetinis srautas – sinusinė laiko funkcija.
• IV-me kvadrante- grafiniu būdu gauta reaktyviosios t.v. srovės kitimo kreivė i0r= f(t). Ši srovė – nesinusinė, nors jos sukurtas srautas sinusinis.
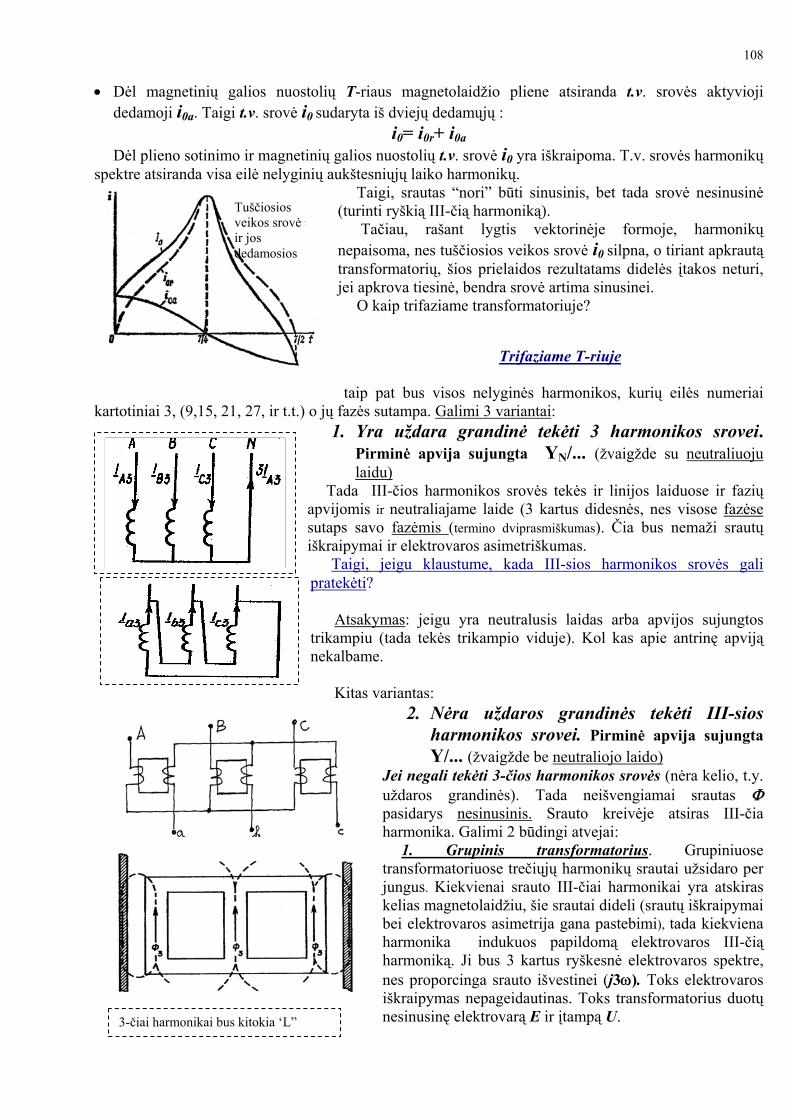
108
• Dėl magnetinių galios nuostolių T-riaus magnetolaidžio pliene atsiranda t.v. srovės aktyvioji dedamoji i0a. Taigi t.v. srovė i0 sudaryta iš dviejų dedamųjų :
i0= i0r+ i0aDėl plieno sotinimo ir magnetinių galios nuostolių t.v. srovė i0 yra iškraipoma. T.v. srovės harmonikų
spektre atsiranda visa eilė nelyginių aukštesniųjų laiko harmonikų. Taigi, srautas “nori” būti sinusinis, bet tada srovė nesinusinė
(turinti ryškią III-čią harmoniką).
Tuščiosios veikos srovė ir jos dedamosios
Tačiau, rašant lygtis vektorinėje formoje, harmonikų nepaisoma, nes tuščiosios veikos srovė i0 silpna, o tiriant apkrautą transformatorių, šios prielaidos rezultatams didelės įtakos neturi, jei apkrova tiesinė, bendra srovė artima sinusinei.
O kaip trifaziame transformatoriuje?
Trifaziame T-riuje
taip pat bus visos nelyginės harmonikos, kurių eilės numeriai
kartotiniai 3, (9,15, 21, 27, ir t.t.) o jų fazės sutampa. Galimi 3 variantai: 1. Yra uždara grandinė tekėti 3 harmonikos srovei.
Pirminė apvija sujungta YN/... (žvaigžde su neutraliuoju laidu)
Tada III-čios harmonikos srovės tekės ir linijos laiduose ir fazių apvijomis ir neutraliajame laide (3 kartus didesnės, nes visose fazėse sutaps savo fazėmis (termino dviprasmiškumas). Čia bus nemaži srautų iškraipymai ir elektrovaros asimetriškumas.
Taigi, jeigu klaustume, kada III-sios harmonikos srovės gali pratekėti?
Atsakymas: jeigu yra neutralusis laidas arba apvijos sujungtos
trikampiu (tada tekės trikampio viduje). Kol kas apie antrinę apviją nekalbame.
Kitas variantas:
2. Nėra uždaros grandinės tekėti III-sios harmonikos srovei. Pirminė apvija sujungta Y/... (žvaigžde be neutraliojo laido)
3-čiai harmonikai bus kitokia ‘L”
Jei negali tekėti 3-čios harmonikos srovės (nėra kelio, t.y. uždaros grandinės). Tada neišvengiamai srautas Φ pasidarys nesinusinis. Srauto kreivėje atsiras III-čia harmonika. Galimi 2 būdingi atvejai:
1. Grupinis transformatorius. Grupiniuose transformatoriuose trečiųjų harmonikų srautai užsidaro per jungus. Kiekvienai srauto III-čiai harmonikai yra atskiras kelias magnetolaidžiu, šie srautai dideli (srautų iškraipymai bei elektrovaros asimetrija gana pastebimi), tada kiekviena harmonika indukuos papildomą elektrovaros III-čią harmoniką. Ji bus 3 kartus ryškesnė elektrovaros spektre, nes proporcinga srauto išvestinei (j3ω). Toks elektrovaros iškraipymas nepageidautinas. Toks transformatorius duotų nesinusinę elektrovarą E ir įtampą U.
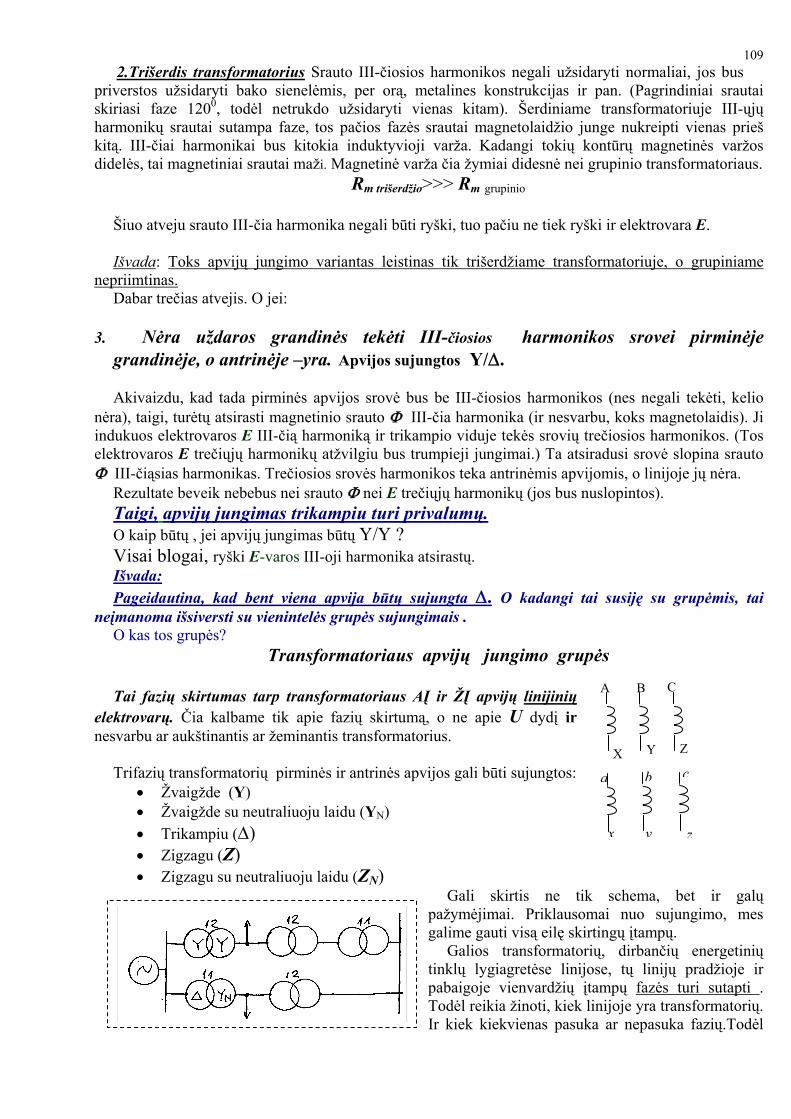
109 2.Trišerdis transformatorius Srauto III-čiosios harmonikos negali užsidaryti normaliai, jos bus
priverstos užsidaryti bako sienelėmis, per orą, metalines konstrukcijas ir pan. (Pagrindiniai srautai skiriasi faze 1200, todėl netrukdo užsidaryti vienas kitam). Šerdiniame transformatoriuje III-ųjų harmonikų srautai sutampa faze, tos pačios fazės srautai magnetolaidžio junge nukreipti vienas prieš kitą. III-čiai harmonikai bus kitokia induktyvioji varža. Kadangi tokių kontūrų magnetinės varžos didelės, tai magnetiniai srautai maži. Magnetinė varža čia žymiai didesnė nei grupinio transformatoriaus.
Rm trišerdžio>>> R m grupinio
Šiuo atveju srauto III-čia harmonika negali būti ryški, tuo pačiu ne tiek ryški ir elektrovara E. Išvada: Toks apvijų jungimo variantas leistinas tik trišerdžiame transformatoriuje, o grupiniame
nepriimtinas. Dabar trečias atvejis. O jei:
3. Nėra uždaros grandinės tekėti III-čiosios harmonikos srovei pirminėje grandinėje, o antrinėje –yra. Apvijos sujungtos Y/Δ.
Akivaizdu, kad tada pirminės apvijos srovė bus be III-čiosios harmonikos (nes negali tekėti, kelio
nėra), taigi, turėtų atsirasti magnetinio srauto Φ III-čia harmonika (ir nesvarbu, koks magnetolaidis). Ji indukuos elektrovaros E III-čią harmoniką ir trikampio viduje tekės srovių trečiosios harmonikos. (Tos elektrovaros E trečiųjų harmonikų atžvilgiu bus trumpieji jungimai.) Ta atsiradusi srovė slopina srauto Φ III-čiąsias harmonikas. Trečiosios srovės harmonikos teka antrinėmis apvijomis, o linijoje jų nėra.
Rezultate beveik nebebus nei srauto Φ nei E trečiųjų harmonikų (jos bus nuslopintos). Taigi, apvijų jungimas trikampiu turi privalumų. O kaip būtų , jei apvijų jungimas būtų Y/Y ? Visai blogai, ryški E-varos III-oji harmonika atsirastų. Išvada: Pageidautina, kad bent viena apvija būtų sujungta Δ. O kadangi tai susiję su grupėmis, tai
neįmanoma išsiversti su vienintelės grupės sujungimais . O kas tos grupės?
Transformatoriaus apvijų jungimo grupės
A B C
X Y Z
a b c
x y z
Tai fazių skirtumas tarp transformatoriaus AĮ ir ŽĮ apvijų linijinių elektrovarų. Čia kalbame tik apie fazių skirtumą, o ne apie U dydį ir nesvarbu ar aukštinantis ar žeminantis transformatorius.
Trifazių transformatorių pirminės ir antrinės apvijos gali būti sujungtos:
• Žvaigžde (Y) • Žvaigžde su neutraliuoju laidu (YN) • Trikampiu (Δ) • Zigzagu (Z) • Zigzagu su neutraliuoju laidu (ZN)
Gali skirtis ne tik schema, bet ir galų pažymėjimai. Priklausomai nuo sujungimo, mes galime gauti visą eilę skirtingų įtampų.
Galios transformatorių, dirbančių energetinių tinklų lygiagretėse linijose, tų linijų pradžioje ir pabaigoje vienvardžių įtampų fazės turi sutapti . Todėl reikia žinoti, kiek linijoje yra transformatorių. Ir kiek kiekvienas pasuka ar nepasuka fazių.Todėl
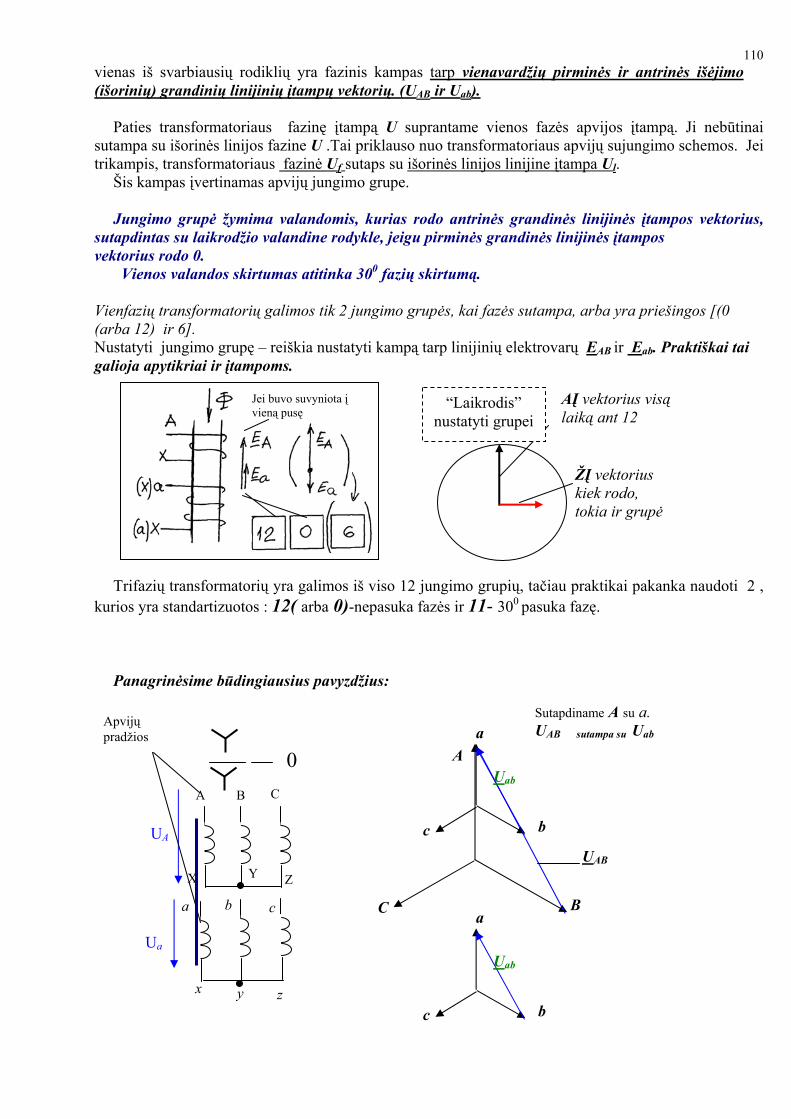
110vienas iš svarbiausių rodiklių yra fazinis kampas tarp vienavardžių pirminės ir antrinės išėjimo (išorinių) grandinių linijinių įtampų vektorių. (UAB ir Uab).
Paties transformatoriaus fazinę įtampą U suprantame vienos fazės apvijos įtampą. Ji nebūtinai
sutampa su išorinės linijos fazine U .Tai priklauso nuo transformatoriaus apvijų sujungimo schemos. Jei trikampis, transformatoriaus fazinė Uf sutaps su išorinės linijos linijine įtampa Ul.
Šis kampas įvertinamas apvijų jungimo grupe. Jungimo grupė žymima valandomis, kurias rodo antrinės grandinės linijinės įtampos vektorius,
sutapdintas su laikrodžio valandine rodykle, jeigu pirminės grandinės linijinės įtampos vektorius rodo 0.
Vienos valandos skirtumas atitinka 300 fazių skirtumą.
Vienfazių transformatorių galimos tik 2 jungimo grupės, kai fazės sutampa, arba yra priešingos [(0 (arba 12) ir 6]. Nustatyti jungimo grupę – reiškia nustatyti kampą tarp linijinių elektrovarų EAB ir Eab. Praktiškai tai galioja apytikriai ir įtampoms.
Trifazių transformatorių yra galimos iš viso 12 jungimo grupių, tačiau praktikai pakanka naudoti 2 ,
kurios yra standartizuotos : 12( arba 0)-nepasuka fazės ir 11- 300 pasuka fazę. Panagrinėsime būdingiausius pavyzdžius:
AĮ vektorius visą laiką ant 12
ŽĮ vektorius kiek rodo, tokia ir grupė
“Laikrodis” nustatyti grupei
Jei buvo suvyniota į vieną pusę
A B C
X Y Z
a b c
x y z
Ua
UA
0
Apvijų pradžios
A
B C
UAB
a
b c
Uab
a
b c
Sutapdiname A su a. UAB sutampa su Uab
Uab

111Kitas atvejis, pakeitus sujungimą: antrinės apvijos galai sukeičiami, gautume 6 grupę
Ua
UA
6 A B C
X Y Z
a b c
x y z C
A
B
a
b c
UAB
a
b c
Uab
Uab
Uab
11
A B C
x
X Y Z
a b c
UA
Ant vieno magnetolaidžio užmautos abi apvijos, todėl Uac kryptis
sutaps su UA
y z
Uac
UAB
UA
UC
300
UB
Ucb Uab
Uab
Tenka pakeisti Uba į Uab
Uba
Uac

112
1
A B C
x
Nubraižytose jungimo schemose priimta, kad pirminių ir antrinių apvijų vyniojimo kryptys tos
pačios. Standartas reikalauja, kad nepriklausomai nuo to, kiek apvijų turi transformatorius ir kiek fazių, 1 , ar 3, leidžiamos jungimo grupės 0 ir 11.
Lygiagretus transformatorių darbas
Kaip taisyklė, dirba keletas lygiagrečiai sujungtų transformatorių. To reikia dėl:
• elektros tiekimo patikimumo; • didesnės galios perdavimo; • efektyvios priežiūros (galima , sumažėjus apkrovai, atjungti vieną transformatorių ir atlikti
profilaktiką) Dviejų ar daugiau transformatorių lygiagrečiu darbu vadinamas toks darbas, kai pirminės apvijos
prijungtos prie bendro pirminio tinklo, o antrinės – prie bendro antrinio tinklo. Perduodant didelės galios elektros energiją, vietoje vieno galingo patogiau lygiagrečiai sujungti kelis
transformatorius. Įvykus avarijai, atjungiami tik tie transformatoriairiai, kurių linijose vyks remontas. Kai apkrova maža, dalį transformatorių galima atjungti, kad būtų mažesni galios nuostoliai.
Lygiagrečiai gali būti sujungti tokie transformatoriai, kuriuose esant tuščiajai veikai, neatsiranda išlyginanti srovė, o apkrovus srovės pasiskirsto proporcingai transformatorių vardinėms galioms.
Tam reikia, kad lygiagrečiai sujungtų transformatorių tuščiosios veikos įtampos būtų lygios ir tos pačios fazės. Srovės pasiskirsto proporcingai vardinėms galioms tuomet, kai trumpojo jungimo įtampos lygios.
Sujungti transformatorius lygiagrečiam darbui galima, tik laikantis tam tikrų sąlygų:
1. Vienodi transformacijos koeficientai . Esant vienodoms pirminėms įtampoms.Tada pirminei įtampai esant vienodai, antrinės įtampos bus vienodos taip pat. Nesilaikant šios sąlygos, net ir tuščiojoje veikoje tarp lygiagrečiai sujungtų transformatorių teka išlyginančioji srovė - dėl antrinių įtampų skirtumo (gali tekėti vardinės srovės). Apkrovus transformatorius, ši srovė susideda su apkrovos srove. Todėl transformatorius, kurio tuščiosios veikos U2 didesnė (kurio k mažesnis), bus perkrautas, o transformatorius, nors ir tos pačios galios, bet su didesniu k, bus nepakankamai apkrautas. Kadangi transformatoriui perkrovimas neleistinas, todėl reikia sumažinti bendrą apkrovą
X Y Z
a b c
UA
Ant vieno magnetolaidžio užmautos abi apvijos, todėl Uab kryptis
sutaps su UA
y z
Uab
a taškas viršuje, b taškas apačioje, sutampantis su x
UAB
UA
UC
300
UB
Ubc
Uab
Uca
Uab
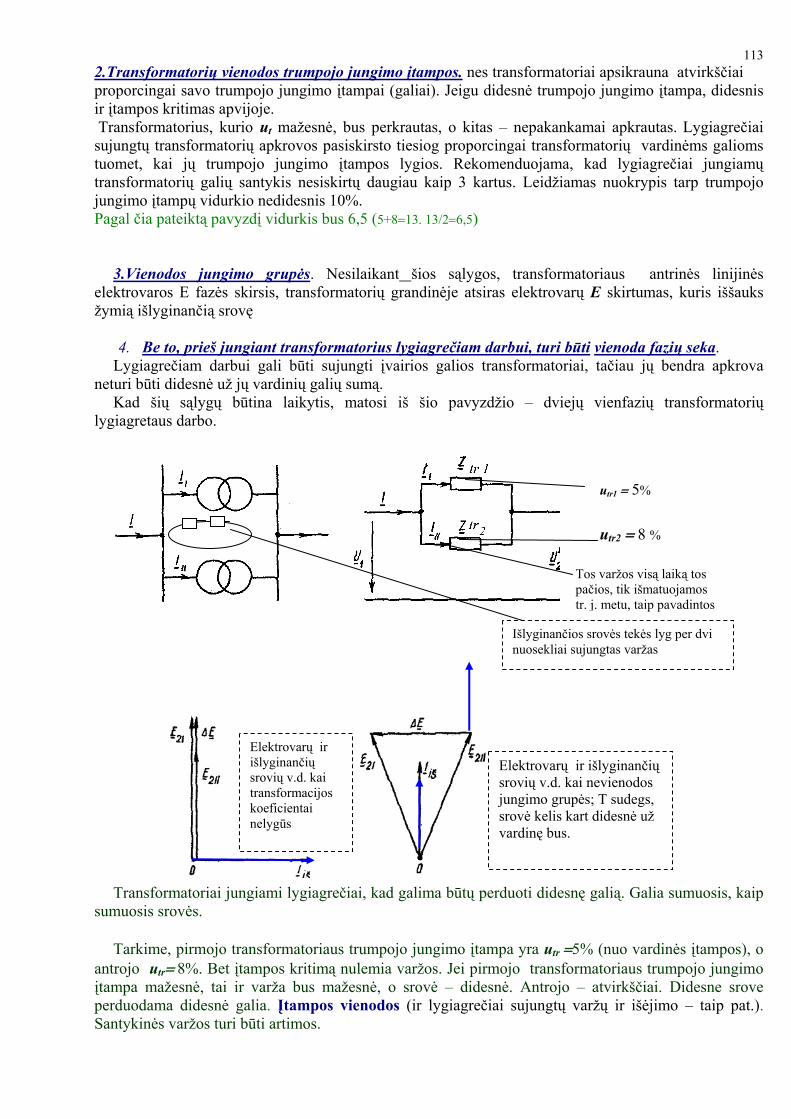
1132.Transformatorių vienodos trumpojo jungimo įtampos. nes transformatoriai apsikrauna atvirkščiai proporcingai savo trumpojo jungimo įtampai (galiai). Jeigu didesnė trumpojo jungimo įtampa, didesnis ir įtampos kritimas apvijoje. Transformatorius, kurio ut mažesnė, bus perkrautas, o kitas – nepakankamai apkrautas. Lygiagrečiai sujungtų transformatorių apkrovos pasiskirsto tiesiog proporcingai transformatorių vardinėms galioms tuomet, kai jų trumpojo jungimo įtampos lygios. Rekomenduojama, kad lygiagrečiai jungiamų transformatorių galių santykis nesiskirtų daugiau kaip 3 kartus. Leidžiamas nuokrypis tarp trumpojo jungimo įtampų vidurkio nedidesnis 10%. Pagal čia pateiktą pavyzdį vidurkis bus 6,5 (5+8=13. 13/2=6,5)
3.Vienodos jungimo grupės. Nesilaikant šios sąlygos, transformatoriaus antrinės linijinės
elektrovaros E fazės skirsis, transformatorių grandinėje atsiras elektrovarų E skirtumas, kuris iššauks žymią išlyginančią srovę
4. Be to, prieš jungiant transformatorius lygiagrečiam darbui, turi būti vienoda fazių seka.
Lygiagrečiam darbui gali būti sujungti įvairios galios transformatoriai, tačiau jų bendra apkrova neturi būti didesnė už jų vardinių galių sumą.
Kad šių sąlygų būtina laikytis, matosi iš šio pavyzdžio – dviejų vienfazių transformatorių lygiagretaus darbo.
Tos varžos visą laikpačios, tik išmatuojtr.
ą tos amos
j. metu, taip pava
Transformatoriai jungiami lygiagrečiai, kad galima būtų perduoti didesnę galią. Galia sumuosis, kaip sumuosis srovės.
Tarkime, pirmojo transformatoriaus trumpojo jungimo įtampa yra utr =5% (nuo vardinės įtampos), o
antrojo utr= 8%. Bet įtampos kritimą nulemia varžos. Jei pirmojo transformatoriaus trumpojo jungimo įtampa mažesnė, tai ir varža bus mažesnė, o srovė – didesnė. Antrojo – atvirkščiai. Didesne srove perduodama didesnė galia. Įtampos vienodos (ir lygiagrečiai sujungtų varžų ir išėjimo – taip pat.). Santykinės varžos turi būti artimos.
Elektrovarų ir išlyginančių srovių v.d. kai nevienodos jungimo grupės; T sudegs, srovė kelis kart didesnė už vardinę bus.
Elektrovarų ir išlyginančių srovių v.d. kai transformacijos koeficientai nelygūs
dintos
utr1 = 5%
utr2 = 8 %
Išlyginančios srovės tekės lygnuosekliai sujungtas varžas
per dvi

114Srovė trumpojo jungimo bandymo metu laikoma vienetine, I=1(santykiniais dydžiais). Įtampa santykiniais dydžiais išreiškia varžą. Čia pavyzdyje - 5% ir 8%. Sujungti lygiagrečiai, pvz., 500 kVA ir 10 kVA transformatorius negalima, nes mažesniojo
transformatoriaus trumpojo jungimo utr didesnė ir varža didesnė. Tačiau galima, pvz., 560 kVA + 320 kVA transformatorius. Parenkama artimų standartų.
usantykinė
5% 8%
1 I Srovė santykinė, lyginant su vardine
0,5
Sujungus lygiagrečiai, abi įtampos bus vienodos
Pirmasis bus pilnai išnaudotas
Antrasis bus nepilnai išnaudotas, tik apie 0,5 vardinės srovės.
U1
U2
Turi būti apylygės galios.
Nesimetrinė trifazių transformatorių apkrova
Esant simetrinei apkrovai, trifazis transformatorius gali būti vertinamas kaip vienfazis. Tačiau ne
visada transformatoriaus fazių apvijos apkrautos simetriškai. Kai apkrova nesimetrinė, tada jau negalima traktuoti kaip vienfazio. Labai retai visos trys fazės
užsitrumpina. Ribiniai nesimetrinės apkrovos atvejai yra vienfaziai ir dvifaziai trumpieji jungimai. Esant nesimetrinei apkrovai, atsiranda papildomi elektromagnetiniai reiškiniai, kurie nepalankiai
veikia transformatoriaus darbą: atsiranda įtampų asimetrija, padidėja nuostoliai ir įšilimas. Ypač tai ryšku, jei yra nesimetrinis trumpasis jungimas.
Skirtingai sujungus transformatoriaus apvijas, nesimetrinės apkrovos atveju gaunami skirtingi magnetiniai srautai magnetolaidžio šerdyse, skirtingos apvijų E-varos ir įtampos.
Nesimetrinės apkrovos tyrimo metodas.
Kaip žinia, trifazė sistema vaizduojama trimis besisukančiais vektoriais, tarp kurių fazinis kampas 1200. Trifazių nesimetriškai apkrautų transformatorių darbo režimus patogu nagrinėti simetrinių dedamųjų metodu. Galima būtų nagrinėti ir kontūrais).
Nesimetrinę sistemą (fazės A, B, C) galima išskaidyti į 3 simetrines sistemas:
1. tiesioginės sekos vektorių A1, B , C1 1 sistemą; čia vektoriai sudaro simetrinę trifazę sistemą, besisukančią kampiniu greičiu ω = 2πf prieš laikrodžio rodyklę
2. atvirkštinės sekos vektorių A , B , C2 2 2 sistemą; čia vektoriai sudaro simetrinę trifazę sistemą,
besisukančią tuo pačiu kampiniu greičiu pagal laikrodžio rodyklę. Tam, kad būtų galima atvirkštinės sekos vektorius sudėti su tiesioginės sekos vektoriais, reikia atvirkštinės sistemos vektorius, pvz., B ir C sukeisti vietomis. Tuo pačiu pakeičiama vektorių sistemos sukimosi kryptis. 2 2
3. nulinės sekos vektorių A , B , C0 0 0 sistemą; nulinės sistemos vektoriai lygūs, jų fazės sutampa ir jie sukasi kampiniu greičiu prieš laikrodžio rodyklę.
Visų simetrinių sistemų tos pačios fazės vektorių geometrinė suma lygi nesimetrinės sistemos
atitinkamos fazės vektoriui (ir atvirkščiai).

115Tuomet A = A1+ A + A ; 2 0
B = B1+ B2+ B0; C = C1+ C2+ C0; Vektorinės diagramos- paveiksle. Tiesioginės, atvirkštinės ir nulinės sekų
kompleksams galioja lygybės: fazei A:
A A Be Ce113
j120 j2400 0
= + +⎛⎝⎜
⎞⎠⎟ ,
A A Be Ce213
j240 j1200 0
= + +⎛⎝⎜
⎞⎠⎟ ,
( )A A B C013= + + ;
Fazei B pasukimo operatorius keičiasi rotacijos principu
B Ae B Ce113
j240 j1200 0
= + +⎛⎝⎜
⎞⎠⎟ ;
B Ae B Ce213
j120 j2400 0
= + +⎛⎝⎜
⎞⎠⎟ ;
( )B A B C013= + + ;
Šiose lygtyse kompleksus A, B, C pakeitus srovėmis, gausime:
I I I e I e ;A113
j120 j2400 0
= + +⎛⎝⎜
⎞⎠⎟A B C
I I I e I eA13 A B
j240C
j1202
0 0
= + +⎛⎝⎜
⎞⎠⎟ ;
( )I I I IA13 A B C0
= + + ;
Atitinkamai A fazės įtampos simetrinių sekų vektoriai bus:
U U U e U e ;A13 A B
j120C
j2401
0 0
= + +⎛⎝⎜
⎞⎠⎟
U U U e U e ;A13 A B
j240C
j1202
0 0
= + +⎛⎝⎜
⎞⎠⎟
( )U U U UA13 A B C0
= + + ;
Simetrinių dedamųjų metodas pagrįstas superpozicijos principu, todėl prisotintoms magnetinėms sistemoms jis netinka.
Tiesioginės ir atvirkštinės sekų srovių ir įtampų sukeltieji elektromagnetiniai reiškiniai iš esmės niekuo nesiskiria nuo tų, kurie vyksta transformatoriuose, kai apkrova simetrinė. Todėl galioja lygtys, vektorinės diagramos ir atstojamosios schemos.
Tačiau visai skirtingus reiškinius sukelia nulinės sekos srovės, kurios atsiranda dėl nesimetrinės apkrovos, kai: • neutraliuoju laidu žvaigžde sujungtoje trifazėje apvijoje teka srovė;
Labai svarbus atvejis, kai antrinėje gali tekėti (YN), o pirminėje – negali (Y). Grupiniame transformatoriuje tada būtų neleistinai iškreiptos antrinės įtampos (nesimetriškai). Todėl su tokia schema grupinis transformatorius negali būti naudojamas
Trišerdis iškreipia žymiai mažiau. Gali būti naudojama tokia schema, bet vis vien reikalauja riboti nulinės sekos dedamąją (nulinės sekos srovę). Reikia stengtis tolygiai paskirstyti vienfazius imtuvus.
• arba kai transformatoriaus pirminės apvijos sujungtos trikampiu. Tada antrinės įtampos žymiai mažiau iškraipomos. (Žvaigždė su neutraliuoju laidu (Y )N turi būti, kad būtų kur prijungti vienfazius imtuvus. Trikampis netiktų dėl saugos reikalavimų (įžeminimui nėra vietos)
• Jei neutraliojo laido nėra, nėra ir nulinės sekos srovių. Bet jei trikampis, gali tekėti trikampio viduje.

116Detaliau – vadovėlyje.
Pereinamieji procesai transformatoriuose
Pasikeitus transformatoriaus apkrovai arba maitinimo įtampai, naujasis režimas pasiekiamas tik po
tam tikro laiko. Vyksta pereinamieji procesai (kurį laiką). Praktinę reikšmę turi tokie pereinamieji procesai, kurių metu atsiranda viršįtampiai arba perdaug
didelės srovės, t.y. susidaro pavojingos transformatoriaus darbui sąlygos. Viršįtampiai susidaro sudėtingose energetinėse sistemose dėl atmosferinių elektros išlydžių (žaibo).
Priklausomai nuo to, kokiu momentu įjungiame, galime gauti įvairius atvejus: Nagrinėsine du būdingus atvejus:
1. Neapkrautą transformatorių užtrumpinus (staigus trumpasis jungimas)
Priklausomai nuo to, kokiu momentu užsitrumpins, galime gauti skirtingus atvejus: a) kai įtampa prasideda nuo max; kaip tada bus su srove?
Šiuo atveju srovės smūgio nebus, pavojaus nebus, srovė pradeda sklandžiai didėti nuo 0. Iškart nusistovi periodinė srovė, aperiodinė dedamoji lygi 0.
Rtr
U1
I1= I2’
Zt
Xtr i
u
b) kai įtampa prasideda nuo 0; kaip tada bus su srove? Žinome, kad srovė induktyvume 900 atsilieka nuo įtampos. Tačiau pereinamojo proceso metu, tik įjungus, srovė gali prasidėti tiktai nuo 0. Ir tik po kokių 5 periodų ji nusistovės atsiliekanti 900. Srovės amplitudė bus dvigubai didesnė. Taigi, srovės smūgis bus, bet nedidelis
Juodoji eksponentė - tai aperiodinė srovė, nuolatinė, vienos krypties + periodinė raudonajai (sudėtinga)
Bet nuo vieno ar kelių smūgių apsauga neturi atjungti, turi
būti su laiko išlaikymu.
⟨ ⟩
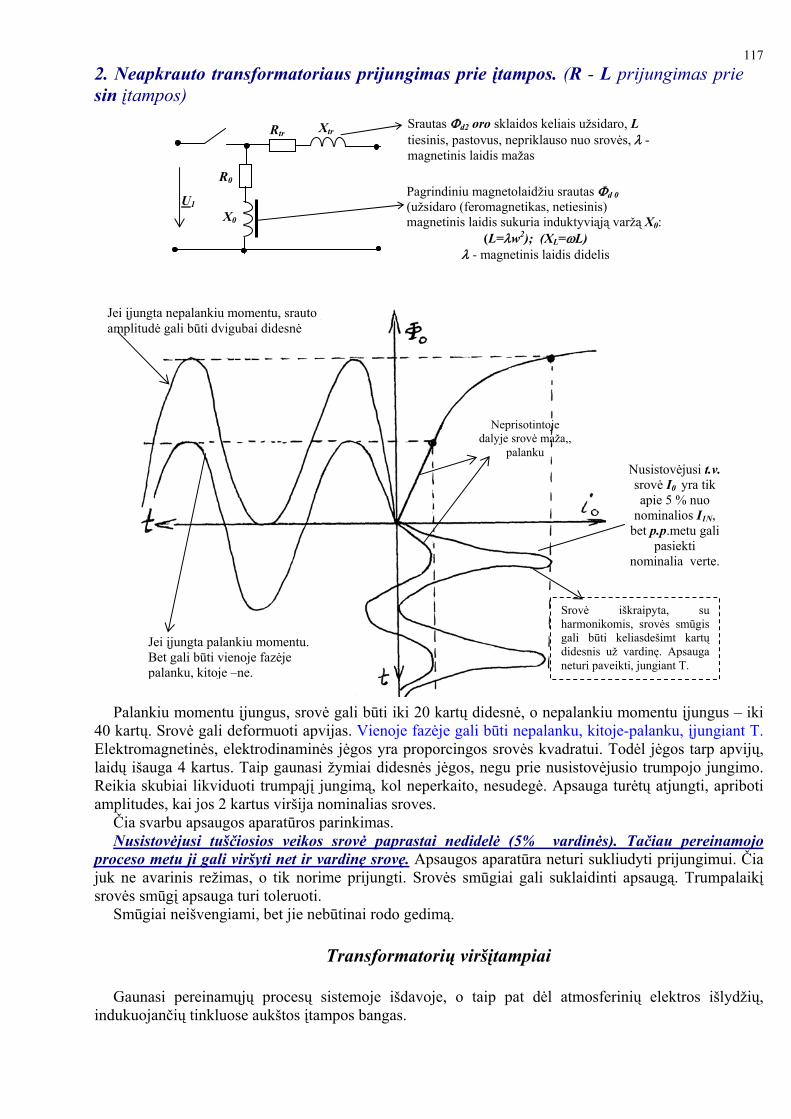
1172. Neapkrauto transformatoriaus prijungimas prie įtampos. (R - L prijungimas prie sin įtampos)
Rtr
U1 X0
R0
Xtr Srautas Φd2 oro sklaidos keliais užsidaro, L tiesinis, pastovus, nepriklauso nuo srovės, λ - magnetinis laidis mažas
Pagrindiniu magnetolaidžiu srautas Φd 0 (užsidaro (feromagnetikas, netiesinis) magnetinis laidis sukuria induktyviąją varžą X0:
(L=λw2); (XL=ωL) λ - magnetinis laidis didelis
Nusistovėjusi t.v. srovė I0 yra tik apie 5 % nuo
nominalios I1N, bet p.p.metu gali
pasiekti nominalią vertę.
Srovė iškraipyta, su harmonikomis, srovės smūgis gali būti keliasdešimt kartų didesnis už vardinę. Apsauga neturi paveikti, jungiant T.
Jei įjungta nepalankiu momentu, srauto amplitudė gali būti dvigubai didesnė
Jei įjungta palankiu momentu. Bet gali būti vienoje fazėje palanku, kitoje –ne.
Neprisotintoje dalyje srovė maža,,
palanku
Palankiu momentu įjungus, srovė gali būti iki 20 kartų didesnė, o nepalankiu momentu įjungus – iki 40 kartų. Srovė gali deformuoti apvijas. Vienoje fazėje gali būti nepalanku, kitoje-palanku, įjungiant T. Elektromagnetinės, elektrodinaminės jėgos yra proporcingos srovės kvadratui. Todėl jėgos tarp apvijų, laidų išauga 4 kartus. Taip gaunasi žymiai didesnės jėgos, negu prie nusistovėjusio trumpojo jungimo. Reikia skubiai likviduoti trumpąjį jungimą, kol neperkaito, nesudegė. Apsauga turėtų atjungti, apriboti amplitudes, kai jos 2 kartus viršija nominalias sroves.
Čia svarbu apsaugos aparatūros parinkimas. Nusistovėjusi tuščiosios veikos srovė paprastai nedidelė (5% vardinės). Tačiau pereinamojo
proceso metu ji gali viršyti net ir vardinę srovę. Apsaugos aparatūra neturi sukliudyti prijungimui. Čia juk ne avarinis režimas, o tik norime prijungti. Srovės smūgiai gali suklaidinti apsaugą. Trumpalaikį srovės smūgį apsauga turi toleruoti.
Smūgiai neišvengiami, bet jie nebūtinai rodo gedimą.
Transformatorių viršįtampiai
Gaunasi pereinamųjų procesų sistemoje išdavoje, o taip pat dėl atmosferinių elektros išlydžių, indukuojančių tinkluose aukštos įtampos bangas.

118Nagrinėjant pereinamuosius procesus viršįtampių metu tenka įvertinti talpas tarp atskirų vijų ir
tarp vijų bei korpuso. Tai įtampos prieauglis virš vardinės įtampos. Dažniausiai būna periodinio arba aperiodinio pobūdžio
impulsai. Skirstomi: 1. komutaciniai (atsiranda dėl trumpojo jungimo); 2. avariniai, kuriuos sukelia linijų komutacija (perjungimai); 3. atmosferiniai (dėl atmosferinių elektros iškrovų.)
Atsiradus viršįtampiams, reiškinių pobūdis priklauso nuo viršįtampio bangos formos. (stačiakampė, aperiodinė, sudėtinga, periodinė).
Paprastai komutaciniai viršįtampiai viršija vardinę fazinę įtampą 2-5 kartus, avariniai- 7-8 kartus, o atmosferiniai – 7-12 kartų.
Jeigu viršįtampis didesnis už vardinę fazinę įtampą daugiau kaip 3 kartus, jis jau pavojingas transformatoriui ir gali sukelti avariją.
Elektros linijų ir pastočių apsaugai įrengiami iškrovikliai., kurių veikimas pagrįstas linijos įžeminimu, veikiant viršįtampiui. Vieni iš tokių yra kibirkštiniai viršįtampių iškrovikliai. Jam veikiant, pramušamas oro tarpas tarp dviejų elektrodų: vienas elektrodas prijungtas prie linijos, kitas – prie žemės (įžemintas). Pramušus oro tarpą, viršįtampis nepranyksta visiškai, o tik sumažėja. Toks sumažintas viršįtampis linijos laidais sklinda greičiu, artimu šviesos greičiui ir pasiekia transformatoriaus gnybtus.
Apsaugai – sustiprinamos pirmų ir paskutinių vijų izoliacija, naudojami talpiniai ekranai: žiediniai, diskiniai, cilindriniai iš metalizuoto elektrokartono (perpjauto spindulio kryptimi, kad nesusidarytų trumpojo jungimo srovės).
Transformatoriaus apsauga nuo viršįtampių
Ji yra dvejopa: išorinė ir vidinė. Išorinės apsaugos tikslas – sumažinti viršįtampį ir jo frontą padaryti lėkštesnį. Ši apsauga įrengiama
linijoje; tai įvairūs iškrovikliai, įžemintuvai, žaibolaidžiai. Vidinė – sudaroma sustiprinant pirmųjų ir paskutiniųjų apvijos vijų izoliaciją (iki 38,5 kV; 110 kV))
ir naudojant talpinius ekranus (iš metalizuoto elektrokartono)- žiedinius ir diskinius, talpinius. (110kV). Spindulio kryptimi ekranai perpjaunami, kad nesusidarytų trumpai sujungtų vijų.
Specialieji transformatoriai:
Matavimo transformatoriai
Kintamosios srovės grandinėse plačiai
naudojami srovės ir įtampos matavimo T-riai. Matavimo prietaisai ar relių apvijos, jungiamos per šiuos T-rius, atskiriamos nuo aukštos įtampos. Padidėja prietaisus aptarnaujančio personalo darbo sauga ir sudaromos sąlygos paprastais matavimo prietaisais išmatuoti stiprias sroves ir aukštas įtampas.
• Įtampos transformatoriai naudojami voltmetrų ir kitų prietaisų įtampos ričių grandinėse; jais transformuojama matuojamoji įtampa. Dirba tuščiosios veikos režimu.
w1=1÷2; w2=100÷200
• Srovės transformatoriai naudojami ampermetrų, srovės relių apvijų, vatmetrų ir elektros skaitiklių srovės ričių grandinėse.; jais transformuojamas matuojamosios srovės stipris. Dirba trumpojo jungimo režimu. Antrinės grandinės negalima palikti atviros.

119Suvirinimo transformatoriai
• Lankinis suvirinimas
Tai vienfazis žeminantis transformatorius, kuris tinklo 220 arba 380 V įtampą transformuoja į 60-70 V įtampą, nes tokia įtampa reikalinga stabiliam lanko degimui.
Darbo režimas artimas trumpajam režimui , nes
elektros lanko varža labai maža. Dėl to srovės stiprio apribojimui į transformatoriaus antrinę grandinę nuosekliai įjungiama reaktyvioji ritė RR su skečiamąja šerdimi. Dėl to pakinta transformatoriaus išorinė ch-ka. Ji pasidaro staigiai krentanti. Keisdami RR ritės magnetinės grandinės oro tarpą, galime labai sklandžiai keisti ritės
induktyviosios varžos dydį. Kartu kinta ir išorinės ch-kos polinkio kampas, taigi, ir srovės stipris. Minimalų tarpą atitinka silpniausia srovė (1-kreivė); maksimalų tarpą – stipriausia srovė (2-kreivė).
RR
1 2
• Kontaktinio suvirinimo transformatoriai dirba impulsiniu režimu. Jie ypatingi tuo, kad jų antrinė
įtampa nedidelė (5-15 V), o antrinė srovė – šimtai amperų.
Autotransformatoriai
Tai toks transformatorius, kuris turi vieną apviją ir kurio nuimama įtampa turi galvaninį (elektrinį) ryšį su pirmine. Dalis energijos perduodama tiesiogiai, elektriškai, o dalis – kaip transformatoriuje, per magnetinį lauką.
Antrinė apvija yra dalis pirminės.Gali būti aukštinantis ir žeminantis. Pagrindinis privalumas – sugebėjimas perduoti didesnę galią. Autotransformatoriams galioja tos pačios transformatorių lygtys. Gali būti vienfaziai ir trifaziai.
Autotransformatoriuje mažesnė antrinės grandinės srovė, mažesni galios nuostoliai, mažesnis
bendrosios apvijos dalies vijų skerspjūvis, gerokai mažesnė masė. Jis daug pigesnis už dviejų apvijų transformatorių.Tačiau jį plačiau panaudoti trukdo elektrinis ryšys.
Nesvarbu, kokio didumo antrinė įtampa, prisilietimo įtampa antrinėje grandinėje gali būti lygi pirminės grandinės aukštai įtampai. Ypač pavojinga juos naudoti galinėse pastotėse.
Mažos galios autotransformatoriai plačiai naudojami laboratorijoje įtampai reguliuoti, scenos
apšvietimui valdyti, asinchroninių variklių paleidimui ir kitur. Didelės galios autotransformatoriai retai turi didesnį transformacijos koeficientą kaip 2.
Kitaip neapsimoka, nes atsiranda saugos klausimai.
Trūkumas – didesnės trumpojo jungimo srovės.
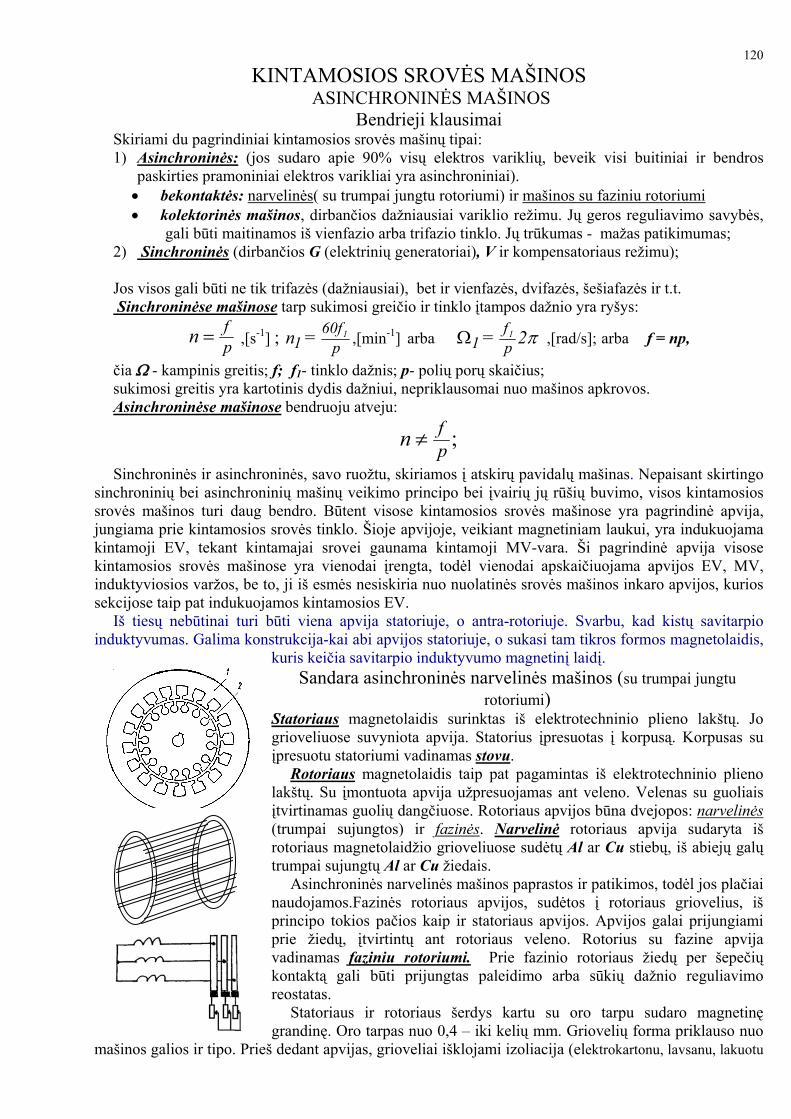
120
KINTAMOSIOS SROVĖS MAŠINOS ASINCHRONINĖS MAŠINOS
Bendrieji klausimai Skiriami du pagrindiniai kintamosios srovės mašinų tipai: 1) Asinchroninės: (jos sudaro apie 90% visų elektros variklių, beveik visi buitiniai ir bendros
paskirties pramoniniai elektros varikliai yra asinchroniniai). • bekontaktės: narvelinės( su trumpai jungtu rotoriumi) ir mašinos su faziniu rotoriumi • kolektorinės mašinos, dirbančios dažniausiai variklio režimu. Jų geros reguliavimo savybės,
gali būti maitinamos iš vienfazio arba trifazio tinklo. Jų trūkumas - mažas patikimumas; 2) Sinchroninės (dirbančios G (elektrinių generatoriai), V ir kompensatoriaus režimu); Jos visos gali būti ne tik trifazės (dažniausiai), bet ir vienfazės, dvifazės, šešiafazės ir t.t. Sinchroninėse mašinose tarp sukimosi greičio ir tinklo įtampos dažnio yra ryšys:
n fp= ,[s-1] ; n =1
60fp
1 ,[min-1] arba Ω1fp= 21 π ,[rad/s]; arba f = np,
čia Ω - kampinis greitis; f; f1- tinklo dažnis; p- polių porų skaičius; sukimosi greitis yra kartotinis dydis dažniui, nepriklausomai nuo mašinos apkrovos. Asinchroninėse mašinose bendruoju atveju:
n fp≠ ;
Sinchroninės ir asinchroninės, savo ruožtu, skiriamos į atskirų pavidalų mašinas. Nepaisant skirtingo sinchroninių bei asinchroninių mašinų veikimo principo bei įvairių jų rūšių buvimo, visos kintamosios srovės mašinos turi daug bendro. Būtent visose kintamosios srovės mašinose yra pagrindinė apvija, jungiama prie kintamosios srovės tinklo. Šioje apvijoje, veikiant magnetiniam laukui, yra indukuojama kintamoji EV, tekant kintamajai srovei gaunama kintamoji MV-vara. Ši pagrindinė apvija visose kintamosios srovės mašinose yra vienodai įrengta, todėl vienodai apskaičiuojama apvijos EV, MV, induktyviosios varžos, be to, ji iš esmės nesiskiria nuo nuolatinės srovės mašinos inkaro apvijos, kurios sekcijose taip pat indukuojamos kintamosios EV.
Iš tiesų nebūtinai turi būti viena apvija statoriuje, o antra-rotoriuje. Svarbu, kad kistų savitarpio induktyvumas. Galima konstrukcija-kai abi apvijos statoriuje, o sukasi tam tikros formos magnetolaidis,
kuris keičia savitarpio induktyvumo magnetinį laidį. Sandara asinchroninės narvelinės mašinos (su trumpai jungtu
rotoriumi) Statoriaus magnetolaidis surinktas iš elektrotechninio plieno lakštų. Jo grioveliuose suvyniota apvija. Statorius įpresuotas į korpusą. Korpusas su įpresuotu statoriumi vadinamas stovu.
Rotoriaus magnetolaidis taip pat pagamintas iš elektrotechninio plieno lakštų. Su įmontuota apvija užpresuojamas ant veleno. Velenas su guoliais įtvirtinamas guolių dangčiuose. Rotoriaus apvijos būna dvejopos: narvelinės (trumpai sujungtos) ir fazinės. Narvelinė rotoriaus apvija sudaryta iš rotoriaus magnetolaidžio grioveliuose sudėtų Al ar Cu stiebų, iš abiejų galų trumpai sujungtų Al ar Cu žiedais.
Asinchroninės narvelinės mašinos paprastos ir patikimos, todėl jos plačiai naudojamos.Fazinės rotoriaus apvijos, sudėtos į rotoriaus griovelius, iš principo tokios pačios kaip ir statoriaus apvijos. Apvijos galai prijungiami prie žiedų, įtvirtintų ant rotoriaus veleno. Rotorius su fazine apvija vadinamas faziniu rotoriumi. Prie fazinio rotoriaus žiedų per šepečių kontaktą gali būti prijungtas paleidimo arba sūkių dažnio reguliavimo reostatas.
Statoriaus ir rotoriaus šerdys kartu su oro tarpu sudaro magnetinę grandinę. Oro tarpas nuo 0,4 – iki kelių mm. Griovelių forma priklauso nuo
mašinos galios ir tipo. Prieš dedant apvijas, grioveliai išklojami izoliacija (elektrokartonu, lavsanu, lakuotu
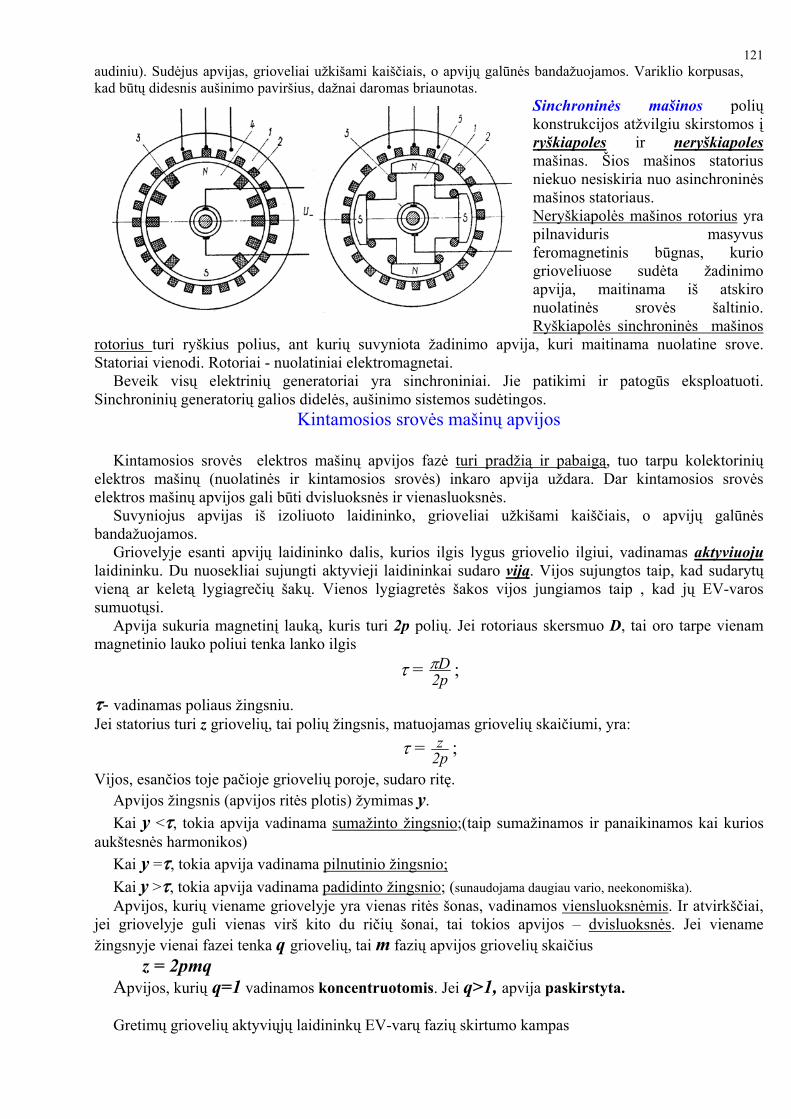
121audiniu). Sudėjus apvijas, grioveliai užkišami kaiščiais, o apvijų galūnės bandažuojamos. Variklio korpusas, kad būtų didesnis aušinimo paviršius, dažnai daromas briaunotas.
Sinchroninės mašinos polių konstrukcijos atžvilgiu skirstomos į ryškiapoles ir neryškiapoles mašinas. Šios mašinos statorius niekuo nesiskiria nuo asinchroninės mašinos statoriaus. Neryškiapolės mašinos rotorius yra pilnaviduris masyvus feromagnetinis būgnas, kurio grioveliuose sudėta žadinimo apvija, maitinama iš atskiro nuolatinės srovės šaltinio. Ryškiapolės sinchroninės mašinos
rotorius turi ryškius polius, ant kurių suvyniota žadinimo apvija, kuri maitinama nuolatine srove. Statoriai vienodi. Rotoriai - nuolatiniai elektromagnetai.
Beveik visų elektrinių generatoriai yra sinchroniniai. Jie patikimi ir patogūs eksploatuoti. Sinchroninių generatorių galios didelės, aušinimo sistemos sudėtingos.
Kintamosios srovės mašinų apvijos
Kintamosios srovės elektros mašinų apvijos fazė turi pradžią ir pabaigą, tuo tarpu kolektorinių elektros mašinų (nuolatinės ir kintamosios srovės) inkaro apvija uždara. Dar kintamosios srovės elektros mašinų apvijos gali būti dvisluoksnės ir vienasluoksnės.
Suvyniojus apvijas iš izoliuoto laidininko, grioveliai užkišami kaiščiais, o apvijų galūnės bandažuojamos.
Griovelyje esanti apvijų laidininko dalis, kurios ilgis lygus griovelio ilgiui, vadinamas aktyviuoju laidininku. Du nuosekliai sujungti aktyvieji laidininkai sudaro viją. Vijos sujungtos taip, kad sudarytų vieną ar keletą lygiagrečių šakų. Vienos lygiagretės šakos vijos jungiamos taip , kad jų EV-varos sumuotųsi.
Apvija sukuria magnetinį lauką, kuris turi 2p polių. Jei rotoriaus skersmuo D, tai oro tarpe vienam magnetinio lauko poliui tenka lanko ilgis
τ π= D2p ;
τ- vadinamas poliaus žingsniu. Jei statorius turi z griovelių, tai polių žingsnis, matuojamas griovelių skaičiumi, yra:
τ = z2p ;
Vijos, esančios toje pačioje griovelių poroje, sudaro ritę. Apvijos žingsnis (apvijos ritės plotis) žymimas y. Kai y <τ, tokia apvija vadinama sumažinto žingsnio;(taip sumažinamos ir panaikinamos kai kurios
aukštesnės harmonikos) Kai y =τ, tokia apvija vadinama pilnutinio žingsnio; Kai y >τ, tokia apvija vadinama padidinto žingsnio; (sunaudojama daugiau vario, neekonomiška). Apvijos, kurių viename griovelyje yra vienas ritės šonas, vadinamos viensluoksnėmis. Ir atvirkščiai,
jei griovelyje guli vienas virš kito du ričių šonai, tai tokios apvijos – dvisluoksnės. Jei viename žingsnyje vienai fazei tenka q griovelių, tai m fazių apvijos griovelių skaičius z = 2pmq
Apvijos, kurių q=1 vadinamos koncentruotomis. Jei q>1, apvija paskirstyta. Gretimų griovelių aktyviųjų laidininkų EV-varų fazių skirtumo kampas
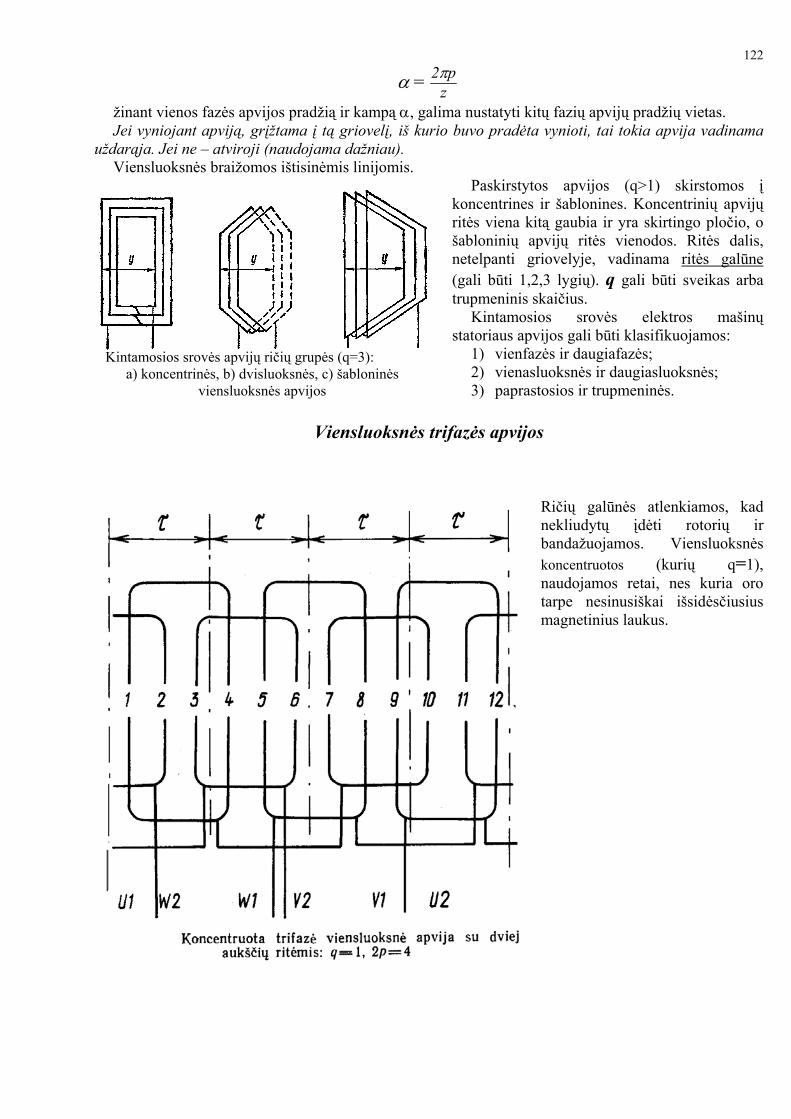
122
α π= 2 pz
žinant vienos fazės apvijos pradžią ir kampą α, galima nustatyti kitų fazių apvijų pradžių vietas. Jei vyniojant apviją, grįžtama į tą griovelį, iš kurio buvo pradėta vynioti, tai tokia apvija vadinama
uždarąja. Jei ne – atviroji (naudojama dažniau). Viensluoksnės braižomos ištisinėmis linijomis.
Paskirstytos apvijos (q>1) skirstomos į koncentrines ir šablonines. Koncentrinių apvijų ritės viena kitą gaubia ir yra skirtingo pločio, o šabloninių apvijų ritės vienodos. Ritės dalis, netelpanti griovelyje, vadinama ritės galūne (gali būti 1,2,3 lygių). q gali būti sveikas arba trupmeninis skaičius.
Kintamosios srovės apvijų ričių grupės (q=3): a) koncentrinės, b) dvisluoksnės, c) šabloninės
viensluoksnės apvijos
Kintamosios srovės elektros mašinų statoriaus apvijos gali būti klasifikuojamos:
1) vienfazės ir daugiafazės; 2) vienasluoksnės ir daugiasluoksnės; 3) paprastosios ir trupmeninės.
Viensluoksnės trifazės apvijos
Ričių galūnės atlenkiamos, kad nekliudytų įdėti rotorių ir bandažuojamos. Viensluoksnės koncentruotos (kurių q=1), naudojamos retai, nes kuria oro tarpe nesinusiškai išsidėsčiusius magnetinius laukus.

123Dažniau vyniojamos apvijos su q>1, su koncentriškai išdėstytomis nevienodo pločio ritėmis.
ir su vienodomis ritėmis

124Koncentruotos ir koncentrinės apvijos gali turėti 2 ar 3 lygių ričių grupes. Apvijos klojamos su
1200 skirtumu viena nuo kitos. Beveik visos trifazės viensluoksnės apvijos pilnojo žingsnio (y=τ), išskyrus grandininę apviją, kurios žingsnis sumažintas (y<τ).
Čia apvijos ričių grupės vyniojamos ne gretimuose grioveliuose, bet vieną griovelį praleidžiant.? Praleistuose grioveliuose vyniojamos kitų fazių ritės. Ritės persipina ir primena grandinę.
Dvisluoksnės trifazės apvijos
Vienas ričių šonas atsiduria viršutiniame griovelio sluoksnyje, kitas- apatiniame (kaip ir nuolatinės srovės inkaro apvijose). Šios apvijos patogios, nes visos ritės vienodos, jos šabloninės, galima automatizuoti. Gali būti bet kokio žingsnio y. Apvija su sumažintu žingsniu: (paprastai šios apvijos gaminamos su sveikuoju q.
Dvisluoksnė trifazė trupmeninė apvija, kurios q=11/4; 2p=4; y=3 ir fazių srovių vektorinė diagrama

125Apvijų EV ir apvijos koeficientas
Besisukantis m. laukas kerta apvijas ir jose indukuoja EV (vienoje apvijos // šakoje):
e w ddt= Φ ;
w- vienos // šakos vijų skaičius. Jei srautas sinusinis, t.y. Φ = Φm sinω1t, tai e = Emsin(ω1t + 900). Norint, kad EV kreivės forma būtų kuo artimesnė sinusinei, imamasi priemonių:
• mažinamas apvijos žingsnis (y<τ) ( ky žingsnio sumažinimo koeficientas) • apvija paskirstoma (q>1); ( kp apvijos paskirstymo koeficientas) • daromi įstriži grioveliai ( kd griovelių įstrižumo koeficientas)
Tačiau visos šios priemonės mažina EV.; tai įvertinama apvijos koeficientu kw = ky kp kd (<1)
Tada apvijoje indukuotos EV amplitudė : Em =2πfkwΦm;
O efektinė vertė: E k fEw
m= =2
4 44, Φw m;
Norint apskaičiuoti EV, būtina žinoti apvijos koeficientą. Pasiaiškinsime atskirai:
Žingsnio sumažinimo koeficientas
Norint sumažinti arba panaikinti kai kurias EV-varos aukštesniąsias harmonikas, mažinamas apvijos
žingsnis y. (Vektorinė atimtis) Stengiamasi parinkti tokį kampą β, kad nežymiai sumažėjus 1-ajai harmonikai, pranyktų arba
smarkiai sumažėtų mažų numerių aukštesnės harmonikos.
Apvijos paskirstymo koeficientas

126
Paskirstytos apvijos magnetinis laukas oro tarpe yra laiptuotas ir artimesnis sinusinei negu koncentruotos apvijos stačiakampis laukas.
Griovelių įstrižumo koeficientas
Jei statorius ir rotorius turi dantelius ir griovelius, tai, sukantis rotoriui, magnetinis laukas oro tarpe pulsuoja, nes kinta magnetinės grandinės laidis. Kai rotoriaus dantis atsiduria prieš statoriaus dantį, laidis didesnis negu tada, kai rotoriaus dantis yra prieš statoriaus griovelį. Pulsuojantis magnetinis laukas indukuoja aukštesnio dažnio EV, kurios vadinamos dantų harmonikomis1. Siekiant panaikinti šias harmonikas, dantys daromi įstriži.
Jei statoriaus ir rotoriaus magnetolaidžio, kurio grioveliuose yra apvija, grioveliai sudaro su mašinos ašimi kampą γ , tai dėl įstrižumo sumažėja EV, indukuota griovelyje gulinčiuose laidininkuose. Jei griovelių įstrižumo nebūtų, tai griovelyje AB EV-vara būtų lygi apskritimo lankui CD. Dėl įstrižumo ši EV proporcinga apskritimo stygai CD
Apvijų magnetovara (MV)
Pilnojo žingsnio ritės MV F ir jos 1; 3; 5 erdvės harmonikos
Magnetinis laukas erdvėje – oro tarpe
Tekėdama apvijomis, srovė sukuria MV-varą. Ši MV (erdvėje) yra stačiakampis, kurio aukštis kinta tokiu dėsniu, kokiu kinta srovė. (Iš tiesų – tai oro tarpo magnetinės įtampos kritimas). Ją galima
išskleisti Furje eilute. Šių harmonikų polių žingsniai mažesni už žingsnį τ tiek kartų, koks yra harmonikos eilės numeris.
1 Nesinusinę laiko f-ją – I ar U kitimą laiko t atžvilgiu galima išskleisti laiko harmonikų spektru. Nesinusinę erdvės f-ją
- B pasiskirstymą oro tarpe galima išskleisti erdvės harmonikų spektru).
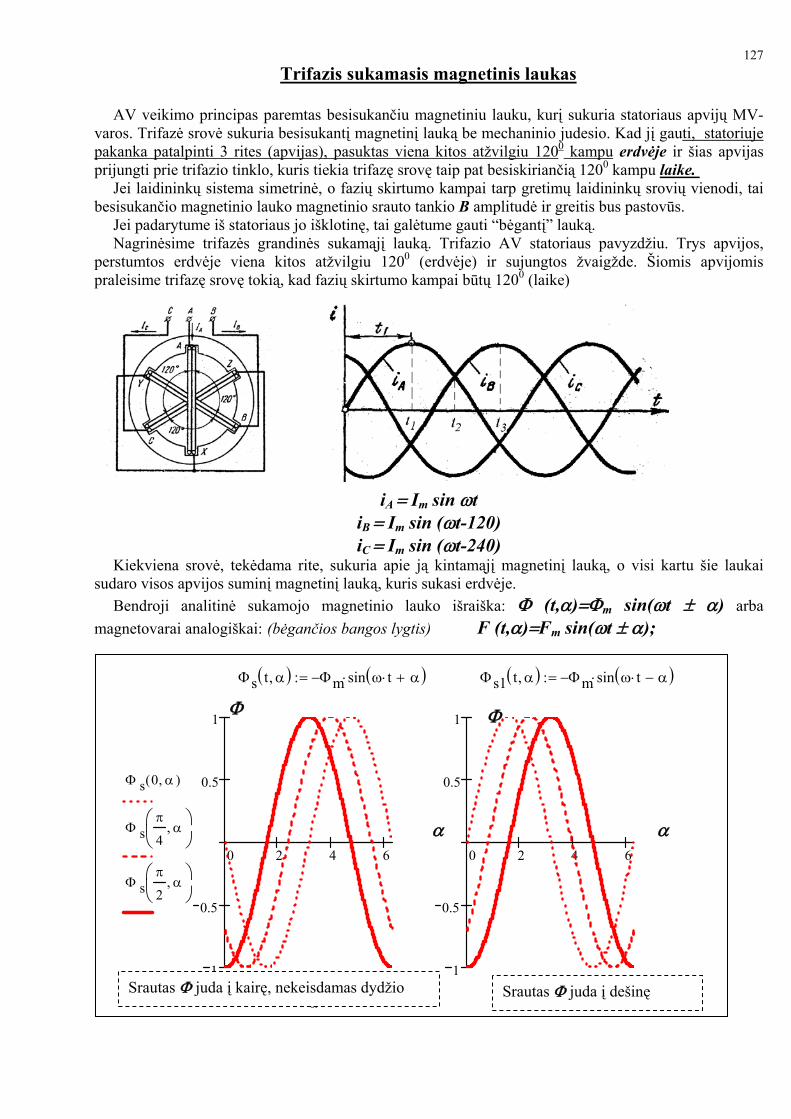
127Trifazis sukamasis magnetinis laukas
AV veikimo principas paremtas besisukančiu magnetiniu lauku, kurį sukuria statoriaus apvijų MV-
varos. Trifazė srovė sukuria besisukantį magnetinį lauką be mechaninio judesio. Kad jį gauti, statoriuje pakanka patalpinti 3 rites (apvijas), pasuktas viena kitos atžvilgiu 1200 kampu erdvėje ir šias apvijas prijungti prie trifazio tinklo, kuris tiekia trifazę srovę taip pat besiskiriančią 1200 kampu laike.
Jei laidininkų sistema simetrinė, o fazių skirtumo kampai tarp gretimų laidininkų srovių vienodi, tai besisukančio magnetinio lauko magnetinio srauto tankio B amplitudė ir greitis bus pastovūs.
Jei padarytume iš statoriaus jo išklotinę, tai galėtume gauti “bėgantį” lauką. Nagrinėsime trifazės grandinės sukamąjį lauką. Trifazio AV statoriaus pavyzdžiu. Trys apvijos,
perstumtos erdvėje viena kitos atžvilgiu 1200 (erdvėje) ir sujungtos žvaigžde. Šiomis apvijomis praleisime trifazę srovę tokią, kad fazių skirtumo kampai būtų 1200 (laike)
iA = Im sin ωt iB = Im sin (ωt-120) iC = Im sin (ωt-240)
Kiekviena srovė, tekėdama rite, sukuria apie ją kintamąjį magnetinį lauką, o visi kartu šie laukai sudaro visos apvijos suminį magnetinį lauką, kuris sukasi erdvėje.
Bendroji analitinė sukamojo magnetinio lauko išraiška: Φ (t,α)=Φm sin(ωt ± α) arba magnetovarai analogiškai: (bėgančios bangos lygtis) F (t,α)=Fm sin(ωt ± α);
Φs t α,( ) Φm− sin ω t⋅ α+( )⋅:= Φs1 t α,( ) Φm− sin ω t⋅ α−( )⋅:=
0 2 4 6
1
0.5
0.5
1Φ
Φ s 0 α,( )
Φ sπ
4α,⎛⎜
⎝⎞⎟⎠
Φ sπ
2α,⎛⎜
⎝⎞⎟⎠
α
0 2 4 6
1
0.5
0.5
1 Φ
Srautas Φ juda į kairę, nekeisdamas dydžio Srautas Φ juda į dešinę
α α
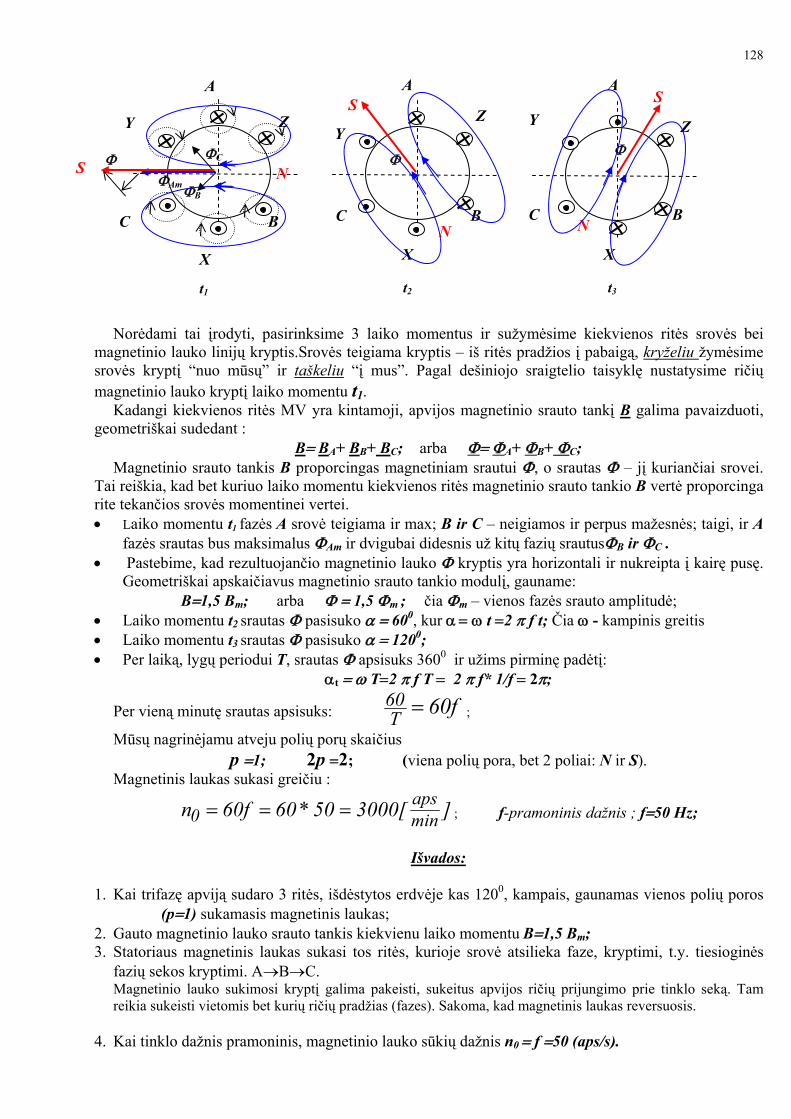
128
Norėdami tai įrodyti, pasirinksime 3 laiko momentus ir sužymėsime kiekvienos ritės srovės bei
magnetinio lauko linijų kryptis.Srovės teigiama kryptis – iš ritės pradžios į pabaigą, kryželiu žymėsime srovės kryptį “nuo mūsų” ir taškeliu “į mus”. Pagal dešiniojo sraigtelio taisyklę nustatysime ričių magnetinio lauko kryptį laiko momentu t1.
Kadangi kiekvienos ritės MV yra kintamoji, apvijos magnetinio srauto tankį B galima pavaizduoti, geometriškai sudedant :
B= BA+ BB+ BC; arba Φ= ΦA+ ΦB+ ΦC; Magnetinio srauto tankis B proporcingas magnetiniam srautui Φ, o srautas Φ – jį kuriančiai srovei.
Tai reiškia, kad bet kuriuo laiko momentu kiekvienos ritės magnetinio srauto tankio B vertė proporcinga rite tekančios srovės momentinei vertei. • Laiko momentu t1 fazės A srovė teigiama ir max; B ir C – neigiamos ir perpus mažesnės; taigi, ir A
fazės srautas bus maksimalus ΦAm ir dvigubai didesnis už kitų fazių srautusΦB ir ΦC . • Pastebime, kad rezultuojančio magnetinio lauko Φ kryptis yra horizontali ir nukreipta į kairę pusę.
Geometriškai apskaičiavus magnetinio srauto tankio modulį, gauname: B=1,5 Bm; arba Φ = 1,5 Φm ; čia Φm – vienos fazės srauto amplitudė;
• Laiko momentu t2 srautas Φ pasisuko α = 600, kur α = ω t =2 π f t; Čia ω - kampinis greitis • Laiko momentu t3 srautas Φ pasisuko α = 1200; • Per laiką, lygų periodui T, srautas Φ apsisuks 3600 ir užims pirminę padėtį:
αt = ω T=2 π f T = 2 π f* 1/f = 2π;
Per vieną minutę srautas apsisuks: 60T 60f= ;
Mūsų nagrinėjamu atveju polių porų skaičius p =1; 2p =2; (viena polių pora, bet 2 poliai: N ir S).
Magnetinis laukas sukasi greičiu :
n 60f 60* 50 3000[ ]0apsmin= = = ; f-pramoninis dažnis ; f=50 Hz;
Išvados:
1. Kai trifazę apviją sudaro 3 ritės, išdėstytos erdvėje kas 1200, kampais, gaunamas vienos polių poros
(p=1) sukamasis magnetinis laukas; 2. Gauto magnetinio lauko srauto tankis kiekvienu laiko momentu B=1,5 Bm; 3. Statoriaus magnetinis laukas sukasi tos ritės, kurioje srovė atsilieka faze, kryptimi, t.y. tiesioginės
fazių sekos kryptimi. A→B→C. Magnetinio lauko sukimosi kryptį galima pakeisti, sukeitus apvijos ričių prijungimo prie tinklo seką. Tam reikia sukeisti vietomis bet kurių ričių pradžias (fazes). Sakoma, kad magnetinis laukas reversuosis.
4. Kai tinklo dažnis pramoninis, magnetinio lauko sūkių dažnis n0 = f =50 (aps/s).
ΦAm
t1 t2 t3
N
S
N S Φ
Φ
C
A A
B B C
Z
X X
Y Y Z
ΦB
ΦC
N
S
Φ
A
B C
X
Y Z

129Trifazis dviejų polių porų besisukantis laukas
Norint turėti lėčiau besisukantį magnetinį lauką, reikia didinti ričių skaičių kiekvienoje fazėje, t.y. didinti statoriaus polių porų skaičių (o fazių skirtumą tarp srovių laike išlaikant 1200). Kadangi ričių yra dvigubai daugiau, gaunami dvigubai mažesni kampai tarp jų pradžių (600), o kiekviena ritė gaubia statorių 900 kampu. Vienos fazės ritės sujungtos nuosekliai. (Sujungus lygiagrečiai, gautume p=1)
Taigi, jei 6 ričių apviją įjungsime į trifazį tinklą, susidarys 2 polių porų magnetinis laukas (2 šiaurės N ir 2 pietų poliai S), kuris per periodą erdvėje pasisuks 1800.
2p = 4; arba p =2;
tada n 1500[ ];060f
p3000
2apsmin= = = arba ( n [0
fp
apss= ]; )
Bendruoju atveju statoriaus magnetinio lauko sukimosi greitis:
p 1 2 3 4 5 n0 3000 1500 1000 750 600
Magnetinio lauko sukimosi greitis dar vadinamas sinchroniniu.
Dvifazis (nesimetrinis) sukamasis magnetinis laukas
Pastovaus didumo besisukantį magnetinį lauką galima gauti ir panaudojus ne 3, o 2 rites, kuriose srovės skiriasi faze 900.
Statoriaus apvijos ritės išdėstomos 900 kampu erdvėje, o srovės jose turi skirtis 1/4 periodo (900). Nagrinėsime 3 pasirinktais laiko momentais. Čia taip pat magnetinio srauto tankis B proporcingas
srovei. Iš vektorių padėčių matome, kad suminis magnetinis laukas sukasi erdvėje. Visais laiko momentais
Φ = Φ1+Φ2; (1)
Kadangi vektoriai statmeni vienas kitam, Φ Φ Φ= +12
22 ;
Φ1≡ i1; Φ2 ≡ i2; o srovės ritėse i1=Im sin ωt; i2 = Im sin(ωt-900) = - Im cos ωt; todėl įstačius į (1)formulę, gausime Φ = Φm= const;;
S2 Z2 A1
A2
X1 X2
B1
B2 C1
C2
Y1
Y2
Z1
N1
N2 S1 Y2
A1
A2
X1
X2
C1 B1
B2
Y1
Z2
Z1 C2
600
2’
Φ
2
t1
S
1
1’
2’
Φ1m
Φ2=0
1
1
1
1
Φ
2 2
’
’
Φ1
’
2
2m
t2 t3
N N
N
S
Φ2 Φ
Φ
S
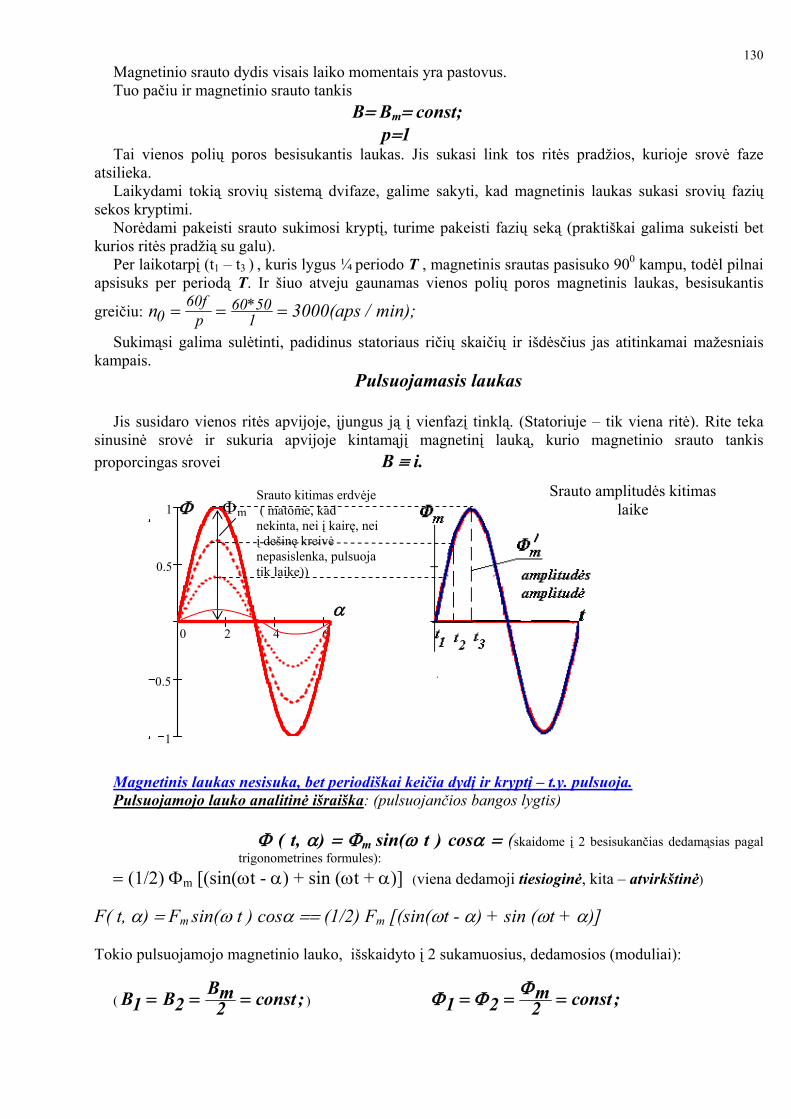
130Magnetinio srauto dydis visais laiko momentais yra pastovus. Tuo pačiu ir magnetinio srauto tankis
B= Bm= const; p=1
Tai vienos polių poros besisukantis laukas. Jis sukasi link tos ritės pradžios, kurioje srovė faze atsilieka.
Laikydami tokią srovių sistemą dvifaze, galime sakyti, kad magnetinis laukas sukasi srovių fazių sekos kryptimi.
Norėdami pakeisti srauto sukimosi kryptį, turime pakeisti fazių seką (praktiškai galima sukeisti bet kurios ritės pradžią su galu).
Per laikotarpį (t1 – t3 ) , kuris lygus ¼ periodo T , magnetinis srautas pasisuko 900 kampu, todėl pilnai apsisuks per periodą T. Ir šiuo atveju gaunamas vienos polių poros magnetinis laukas, besisukantis
greičiu: n 3000(aps / min);060f
p60*50
1= = =
Sukimąsi galima sulėtinti, padidinus statoriaus ričių skaičių ir išdėsčius jas atitinkamai mažesniais kampais.
Pulsuojamasis laukas
Jis susidaro vienos ritės apvijoje, įjungus ją į vienfazį tinklą. (Statoriuje – tik viena ritė). Rite teka sinusinė srovė ir sukuria apvijoje kintamąjį magnetinį lauką, kurio magnetinio srauto tankis proporcingas srovei B ≡ i.
Magnetinis laukas nesisuka, bet periodiškai keičia dydį ir kryptį – t.y. pulsuoja. Pulsuojamojo lauko analitinė išraiška: (pulsuojančios bangos lygtis)
Φ ( t, α) = Φm sin(ω t ) cosα = (skaidome į 2 besisukančias dedamąsias pagal trigonometrines formules):
= (1/2) Φm [(sin(ωt - α) + sin (ωt + α)] (viena dedamoji tiesioginė, kita – atvirkštinė) F( t, α) = Fm sin(ω t ) cosα == (1/2) Fm [(sin(ωt - α) + sin (ωt + α)] Tokio pulsuojamojo magnetinio lauko, išskaidyto į 2 sukamuosius, dedamosios (moduliai):
( B1 B2Bm2 ;= = = const ) Φ Φ Φ
1 2 m2 ;= = = const
0 2 4 6
1
0.5
0.5
11
1−
Φ 0.4 α,( )
Φπ
4 α
Φ Srauto kitimas erdvėje ( matome, kad nekinta, nei į kairę, nei į dešinę kreivė nepasislenka, pulsuoja tik laike))
t3
Φ
t1 t2
t
Srauto amplitudės kitimas laike
Φm Amplitudës amplitudë
Φm
Srauto amplitudės kitimas laike
α,⎛⎜⎝
⎞⎟⎠
Φπ
2α,⎛⎜
⎝⎞⎟⎠
0
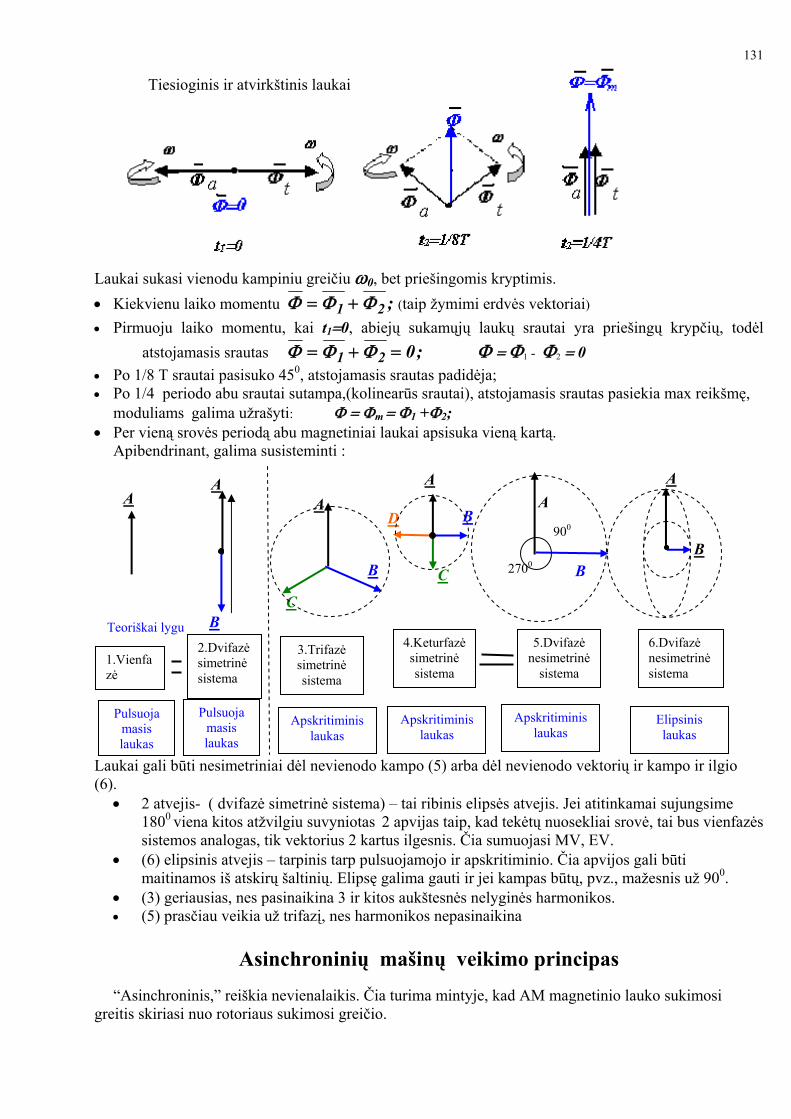
131
Tiesioginis ir atvirkštinis laukai
Laukai sukasi vienodu kampiniu greičiu ω0, bet priešingomis kryptimis. • Kiekvienu laiko momentu Φ Φ Φ= +1 2 ; (taip žymimi erdvės vektoriai) • Pirmuoju laiko momentu, kai t1=0, abiejų sukamųjų laukų srautai yra priešingų krypčių, todėl
atstojamasis srautas Φ Φ Φ= + =1 2 0; Φ = Φ1 - Φ2 = 0
• Po 1/8 T srautai pasisuko 450, atstojamasis srautas padidėja; • Po 1/4 periodo abu srautai sutampa,(kolinearūs srautai), atstojamasis srautas pasiekia max reikšmę,
moduliams galima užrašyti: Φ = Φm = Φ1 +Φ2; • Per vieną srovės periodą abu magnetiniai laukai apsisuka vieną kartą.
Apibendrinant, galima susisteminti :
Laukai gali būti nesimetriniai dėl nevienodo kampo (5) arba dėl nevienodo vektorių ir kampo ir ilgio (6).
• 2 atvejis- ( dvifazė simetrinė sistema) – tai ribinis elipsės atvejis. Jei atitinkamai sujungsime 1800 viena kitos atžvilgiu suvyniotas 2 apvijas taip, kad tekėtų nuosekliai srovė, tai bus vienfazės sistemos analogas, tik vektorius 2 kartus ilgesnis. Čia sumuojasi MV, EV.
• (6) elipsinis atvejis – tarpinis tarp pulsuojamojo ir apskritiminio. Čia apvijos gali būti maitinamos iš atskirų šaltinių. Elipsę galima gauti ir jei kampas būtų, pvz., mažesnis už 900.
• (3) geriausias, nes pasinaikina 3 ir kitos aukštesnės nelyginės harmonikos. • (5) prasčiau veikia už trifazį, nes harmonikos nepasinaikina
Asinchroninių mašinų veikimo principas
“Asinchroninis,” reiškia nevienalaikis. Čia turima mintyje, kad AM magnetinio lauko sukimosi
greitis skiriasi nuo rotoriaus sukimosi greičio.
1.Vienfazė
A A
B 2.Dvifazė simetrinė sistema
B
A
C
3.Trifazė simetrinė sistema
Pulsuojamasis laukas
Pulsuojamasis laukas
Apskritiminis laukas
4.Keturfazė simetrinė sistema
Teoriškai lygu 5.Dvifazė
nesimetrinė sistema
Apskritiminis laukas
Apskritiminis laukas
Elipsinis laukas
6.Dvifazė nesimetrinė sistema
A
B
C
D
A
B
A
900
2700
B

132Istorija
1824 m. pranc. moksl. Arago atrado “elektromagnetinio sukimosi” reiškinį. 1831m. bandymus pakartojo ir aprašė Faradėjus. 1879 m. anglas Baili gavo sukamąjį magnetinį lauką stovinčių elektromagnetų pagalba. 1885 m. Turino prof. Feraris atrado sukamąjį magnetinį lauką ir sukūrė dvifazį indukcinį variklį. Bet neįvertino savo išradimo, nes skaitė, kad η < 0,5. 1887 m., nepriklausomai nuo Ferario, sukamąjį magnetinį lauką atrado Tesla, sukūrė keletą dvifazių ir trifazių variklių (fazių skirtumas 600). 1888 m. Dolivo-Dobrovolskis sukūrė trifazę sistemą, kurios fazės skyrėsi 1200 kampu, 1889 m. atitinkamą asinchroninį variklį. Taip pat įžiūrėjo Ferario klaidą, apskaičiuojant η. Jau pirmasis variklis turėjo η =80%. Kadangi antrasis variklis dirbo blogiau (dėl mažos rotoriaus apvijos varžos), buvo sukurtas variklis su faziniu rotoriumi. Netrukus buvo sukurti ir kiti asinchroninių variklių variantai.( su dvigubu trumpai sujungtu narveliu).
Veikimo principas remiasi besisukančio magnetinio lauko ir rotoriaus apvijos srovių, sukurtų kertant
šias apvijas sukamajam magnetiniam laukui, sąveika.
Sukamojo magnetinio lauko sukimosi greitis: n fp0 = ;
Rotoriaus sukimosi greitis n. n ≠ n0. Asinchroninio variklio veikimo principas
Turime statoriuje patalpintą trifazę apviją, erdvėje perstumtą kas 1200, ir prijungtą prie trifazio tinklo,
kurio srovės laike skiriasi taip pat 1200. Jau įrodėme, kad tada sukuriamas besisukantis magnetinis laukas. Jis kerta,veria rotoriaus laidininkus
(stiebus) ir, remiantis elektromagnetinės indukcijos dėsniu, indukuoja juose EV-varą: e= B l v;
Stiebais ima tekėti srovės, nes rotoriaus apvija uždara. Šių srovių ir statoriaus lauko sąveika sukuria rotoriaus apvijos laidininkus veikiančią elektromagnetinę jėgą.
Pavaizduosime magnetinį lauką, besisukantį pagal laikrodžio rodyklę. Kad būtų lengviau nustatyti indukuotos EV kryptį, įsivaizduokime, kad laukas nejuda, o laidas juda kairėn (reliatyviai). Tada pagal dešinės rankos taisyklę randame EV kryptį “į mus”.
arba reliatyviai
V
n0
B
n0
V VF
F
Pažymime taškeliu indukuotos EV kryptį. Rėmelis uždaras, taigi, juo tekės srovė. Trečiame pav. – laidininkas su srove magnetiniame lauke. Pagal kairės rankos taisyklę nustatome
jėgos, kuri veikia laidininką, kryptį: F=B I l; Matome, kad jėgų dvejetas (arba momentas– jėga * iš peties) nukreipti magnetinio lauko sukimosi
kryptimi. Nagrinėjome variklio pavyzdžiu, o apibendrinant galimi 3 atvejai :
Variklis; 1 > s > 0 Generatorius; 0 > s > - ∞ Elektromagnetinis stabdis; ∞ > s > 1
F
Jei įsuktume rotorių kitu varikliu, pvz
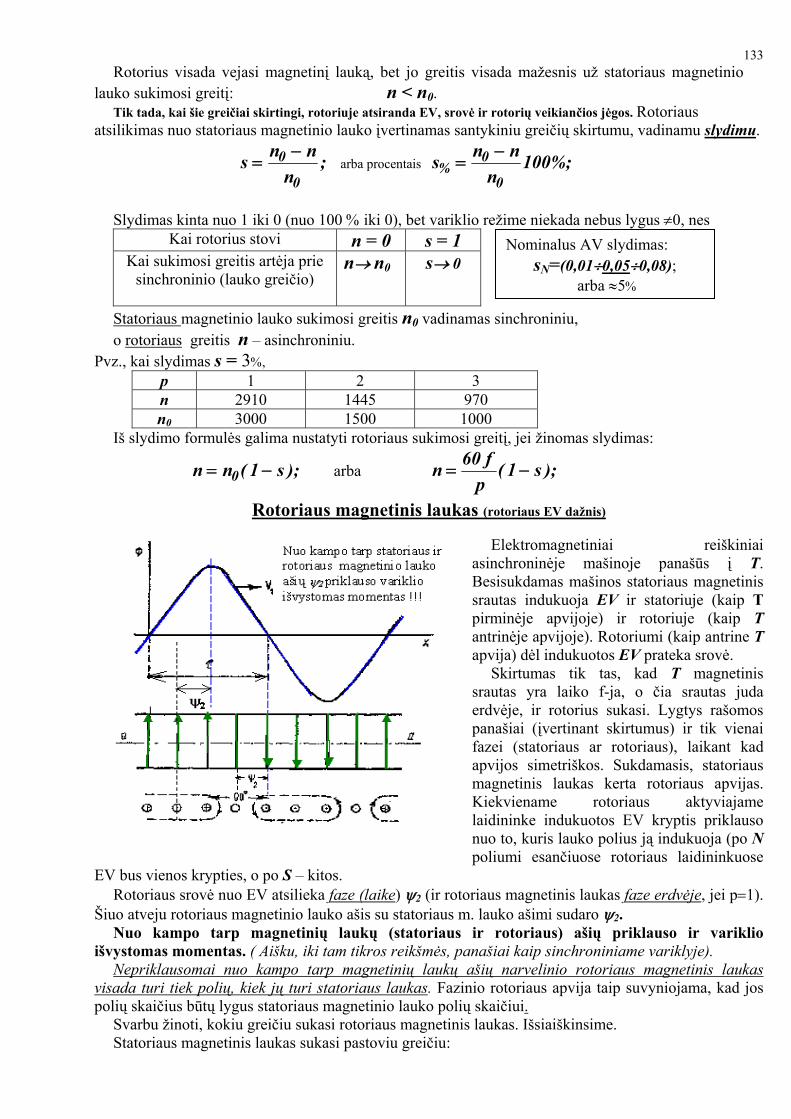
133Rotorius visada vejasi magnetinį lauką, bet jo greitis visada mažesnis už statoriaus magnetinio
lauko sukimosi greitį: n < n0. Tik tada, kai šie greičiai skirtingi, rotoriuje atsiranda EV, srovė ir rotorių veikiančios jėgos. Rotoriaus
atsilikimas nuo statoriaus magnetinio lauko įvertinamas santykiniu greičių skirtumu, vadinamu slydimu.
s n nn
=−0
0; arba procentais s n n
n% =−0
0100%;
Slydimas kinta nuo 1 iki 0 (nuo 100 % iki 0), bet variklio režime niekada nebus lygus ≠0, nes
Kai rotorius stovi n = 0 s = 1 Kai sukimosi greitis artėja prie
sinchroninio (lauko greičio)
n→ n0 s→ 0 Nominalus AV slydimas:
sN=(0,01÷0,05÷0,08); arba ≈5%
Statoriaus magnetinio lauko sukimosi greitis n0 vadinamas sinchroniniu, o rotoriaus greitis n – asinchroniniu.
Pvz., kai slydimas s = 3%, p 1 2 3 n 2910 1445 970 n0 3000 1500 1000
Iš slydimo formulės galima nustatyti rotoriaus sukimosi greitį, jei žinomas slydimas:
n n s= −0 1( ); arba n fp
s= −60 1( );
Rotoriaus magnetinis laukas (rotoriaus EV dažnis)
Elektromagnetiniai reiškiniai asinchroninėje mašinoje panašūs į T. Besisukdamas mašinos statoriaus magnetinis srautas indukuoja EV ir statoriuje (kaip T pirminėje apvijoje) ir rotoriuje (kaip T antrinėje apvijoje). Rotoriumi (kaip antrine T apvija) dėl indukuotos EV prateka srovė.
Skirtumas tik tas, kad T magnetinis srautas yra laiko f-ja, o čia srautas juda erdvėje, ir rotorius sukasi. Lygtys rašomos panašiai (įvertinant skirtumus) ir tik vienai fazei (statoriaus ar rotoriaus), laikant kad apvijos simetriškos. Sukdamasis, statoriaus magnetinis laukas kerta rotoriaus apvijas. Kiekviename rotoriaus aktyviajame laidininke indukuotos EV kryptis priklauso nuo to, kuris lauko polius ją indukuoja (po N poliumi esančiuose rotoriaus laidininkuose
EV bus vienos krypties, o po S – kitos. Rotoriaus srovė nuo EV atsilieka faze (laike) ψ2 (ir rotoriaus magnetinis laukas faze erdvėje, jei p=1).
Šiuo atveju rotoriaus magnetinio lauko ašis su statoriaus m. lauko ašimi sudaro ψ2. Nuo kampo tarp magnetinių laukų (statoriaus ir rotoriaus) ašių priklauso ir variklio
išvystomas momentas. ( Aišku, iki tam tikros reikšmės, panašiai kaip sinchroniniame variklyje). Nepriklausomai nuo kampo tarp magnetinių laukų ašių narvelinio rotoriaus magnetinis laukas
visada turi tiek polių, kiek jų turi statoriaus laukas. Fazinio rotoriaus apvija taip suvyniojama, kad jos polių skaičius būtų lygus statoriaus magnetinio lauko polių skaičiui.
Svarbu žinoti, kokiu greičiu sukasi rotoriaus magnetinis laukas. Išsiaiškinsime. Statoriaus magnetinis laukas sukasi pastoviu greičiu:

134
n fp0
60= ;
Iš čia tinklo (tuo pačiu ir statoriaus srovės) dažnis : f f pn= =1
060
;
(statoriaus EV-varos dažnis lygus ją indukavusio magnetinio srauto, t.y. tinklo įtampos, prie kurios prijungta statoriaus apvija, dažniui, f1 = f);
Tačiau rotoriuje indukuojamos EV-varos ir pratekančios srovės dažnis priklauso nuo rotoriaus greičio lauko atžvilgiu, t.y. nuo greičių skirtumo
(n0 - n);
Todėl rotoriaus srovės dažnis: ( )f
p n n2
060
=−
; (1)
Prisiminus slydimo formulę s n nn
=−0
0; Iš čia (n0 - n) = s n0 . Tai įstačius į (1) formulę:
f pn s sf20
60= = ;
Variklį paleidžiant n=0 s=1 f2=f, tai max, lygus 50 Hz Įsisukus nominaliai n=nN sN =0,05 f2=s f = 0,05*50 =2,5 Hz
f2= s f
Artėjant greičiui prie n0 n→n0 s→0 f2→0 Gavome, kad rotoriaus EV-varos ir srovės dažnis proporcingas rotoriaus slydimui, t.y. priklauso
nuo rotoriaus sukimosi greičio. Rotoriaus magnetinio lauko sukimosi greitis rotoriaus atžvilgiu:
n2r = f2/p = f s / p = n0 s ; (greitis mažas, nes s mažas)
Rotoriaus magnetinio lauko sukimosi greitis statoriaus lauko atžvilgiu:
n2 = n + n2r = n0 (1-s) + n0 s = n0Rotoriaus apvijos srovės sukurtas magnetinis laukas, nesvarbu, koks rotoriaus sukimosi greitis,
sukasi sinchroniškai su statoriaus magnetiniu lauku. Nuo šių laukų stiprio ir kampo tarp jų priklauso sukimo momento dydis.
Trifazė asinchroninė mašina su sustabdytu rotoriumi
Tarkime, kad trifazės asinchroninės mašinos apvija prijungta prie trifazio simetrinio tinklo. Rotorius nesisuka, statoriaus ir rotoriaus apvijos reliatyviai taip pat nejuda. Į tokią asinchroninę mašiną galim žiūrėti kaip į trifazį transformatorių, kurio pirminė apvija yra statoriaus apvija, o antrinė – rotoriaus. Statoriaus ir rotoriaus apvijomis tekančių srovių sukurto magnetinio lauko Φm (amplitudė) slinkdama oro tarpu, indukuoja EV-varas e1 ir e2 , kurios kinta sinuso dėsniu. Jų efektinis dydis: statoriaus: E1 = 4,44 kw1 w1 f1 Φm; (1)
O sustabdyto rotoriaus fazės apvijos efektinė EV: E2 = 4,44 kw2 w2 f1 Φm; (2)
Čia kw1- kw2 statoriaus ir rotoriaus vienos fazės apvijos 1-sios harmonikos apvijos koeficientas,
(įvertina fazių nesutapimą vijose);
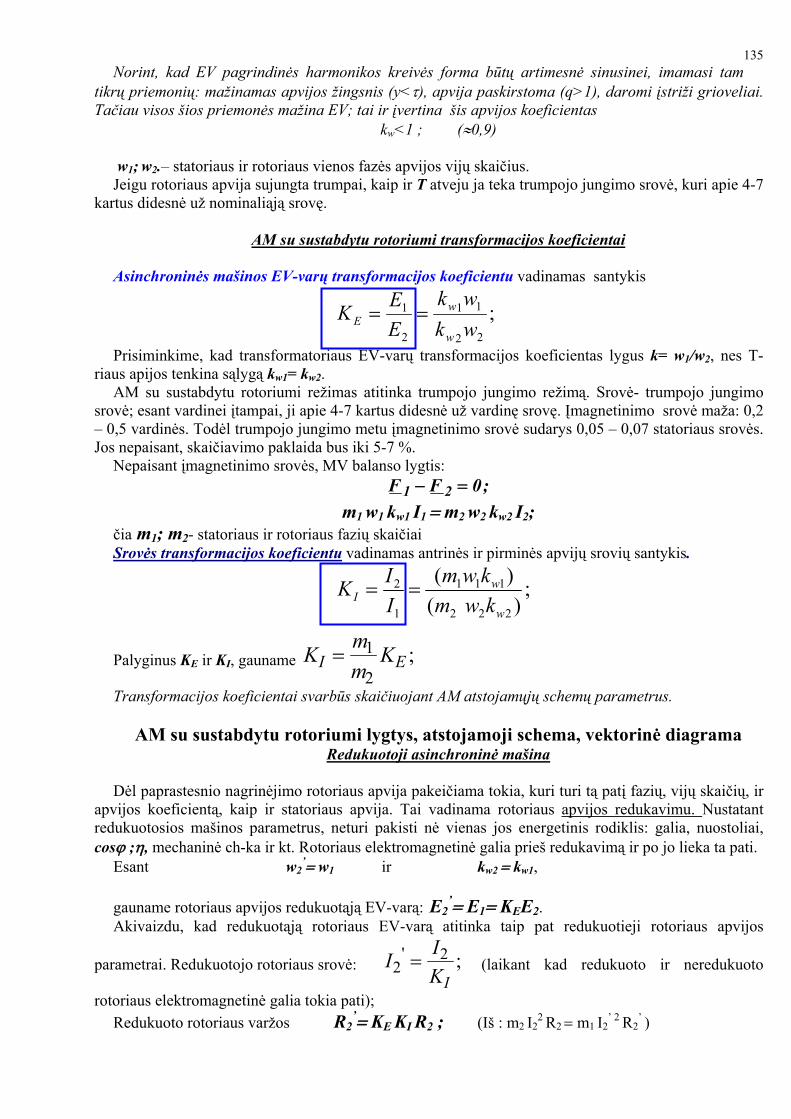
135Norint, kad EV pagrindinės harmonikos kreivės forma būtų artimesnė sinusinei, imamasi tam
tikrų priemonių: mažinamas apvijos žingsnis (y<τ), apvija paskirstoma (q>1), daromi įstriži grioveliai. Tačiau visos šios priemonės mažina EV; tai ir įvertina šis apvijos koeficientas
kw<1 ; (≈0,9)
w1; w2.– statoriaus ir rotoriaus vienos fazės apvijos vijų skaičius. Jeigu rotoriaus apvija sujungta trumpai, kaip ir T atveju ja teka trumpojo jungimo srovė, kuri apie 4-7
kartus didesnė už nominaliąją srovę.
AM su sustabdytu rotoriumi transformacijos koeficientai
Asinchroninės mašinos EV-varų transformacijos koeficientu vadinamas santykis
;22
11
2
1
wkwk
EEK
w
wE ==
Prisiminkime, kad transformatoriaus EV-varų transformacijos koeficientas lygus k= w1/w2, nes T-riaus apijos tenkina sąlygą kw1= kw2.
AM su sustabdytu rotoriumi režimas atitinka trumpojo jungimo režimą. Srovė- trumpojo jungimo srovė; esant vardinei įtampai, ji apie 4-7 kartus didesnė už vardinę srovę. Įmagnetinimo srovė maža: 0,2 – 0,5 vardinės. Todėl trumpojo jungimo metu įmagnetinimo srovė sudarys 0,05 – 0,07 statoriaus srovės. Jos nepaisant, skaičiavimo paklaida bus iki 5-7 %.
Nepaisant įmagnetinimo srovės, MV balanso lygtis: F F1 2 0− = ;
m1 w1 kw1 I1 = m2 w2 kw2 I2; čia m1; m2- statoriaus ir rotoriaus fazių skaičiai Srovės transformacijos koeficientu vadinamas antrinės ir pirminės apvijų srovių santykis.
;)(
)(
222
111
w
w
kwmkwm
=1
2I I
IK =
Palyginus KE ir KI, gauname K mm
KI E= 1
2;
Transformacijos koeficientai svarbūs skaičiuojant AM atstojamųjų schemų parametrus.
AM su sustabdytu rotoriumi lygtys, atstojamoji schema, vektorinė diagrama Redukuotoji asinchroninė mašina
Dėl paprastesnio nagrinėjimo rotoriaus apvija pakeičiama tokia, kuri turi tą patį fazių, vijų skaičių, ir
apvijos koeficientą, kaip ir statoriaus apvija. Tai vadinama rotoriaus apvijos redukavimu. Nustatant redukuotosios mašinos parametrus, neturi pakisti nė vienas jos energetinis rodiklis: galia, nuostoliai, cosϕ ;η, mechaninė ch-ka ir kt. Rotoriaus elektromagnetinė galia prieš redukavimą ir po jo lieka ta pati.
Esant w2’= w1 ir kw2 = kw1,
gauname rotoriaus apvijos redukuotąją EV-varą: E2
’= E1= KEE2. Akivaizdu, kad redukuotąją rotoriaus EV-varą atitinka taip pat redukuotieji rotoriaus apvijos
parametrai. Redukuotojo rotoriaus srovė: I IKI
22' ;= (laikant kad redukuoto ir neredukuoto
rotoriaus elektromagnetinė galia tokia pati); Redukuoto rotoriaus varžos R2
’= KE KI R2 ; (Iš : m2 I22 R2 = m1 I2
’ 2 R2’ )
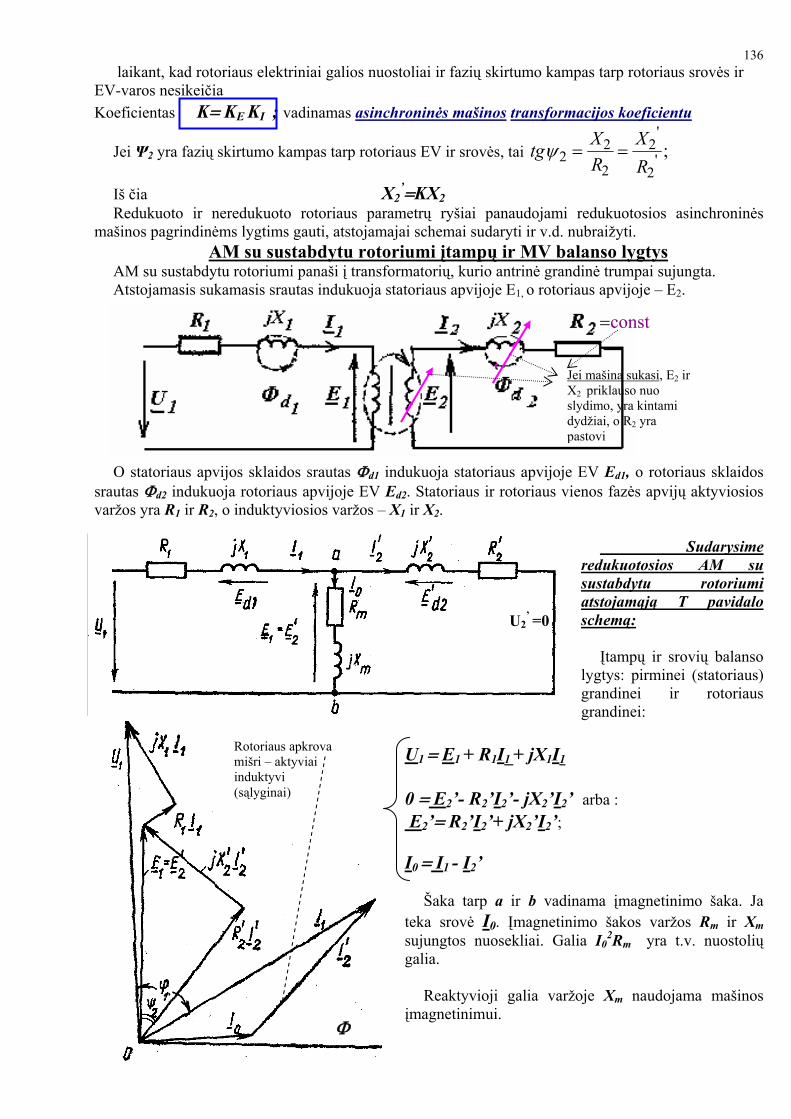
136 laikant, kad rotoriaus elektriniai galios nuostoliai ir fazių skirtumo kampas tarp rotoriaus srovės ir
EV-varos nesikeičia Koeficientas K= KE KI ; vadinamas asinchroninės mašinos transformacijos koeficientu
Jei Ψ2 yra fazių skirtumo kampas tarp rotoriaus EV ir srovės, tai tgXR
XR
ψ22
2
2
2= =
'
' ;
Iš čia X2’=KX2
Redukuoto ir neredukuoto rotoriaus parametrų ryšiai panaudojami redukuotosios asinchroninės mašinos pagrindinėms lygtims gauti, atstojamajai schemai sudaryti ir v.d. nubraižyti.
AM su sustabdytu rotoriumi įtampų ir MV balanso lygtys AM su sustabdytu rotoriumi panaši į transformatorių, kurio antrinė grandinė trumpai sujungta. Atstojamasis sukamasis srautas indukuoja statoriaus apvijoje E1, o rotoriaus apvijoje – E2.
O statoriaus apvijos sklaidos srautas Φd1 indukuoja statoriaus apvijoje EV Ed1, o rotoriaus sklaidos srautas Φd2 indukuoja rotoriaus apvijoje EV Ed2. Statoriaus ir rotoriaus vienos fazės apvijų aktyviosios varžos yra R1 ir R2, o induktyviosios varžos – X1 ir X2.
Sudarysime
redukuotosios AM su sustabdytu rotoriumi atstojamąją T pavidalo schemą:
Įtampų ir srovių balanso
lygtys: pirminei (statoriaus) grandinei ir rotoriaus grandinei:
U1 = E1 + R1I1 + jX1I1
0 = E2’- R2’I2’- jX2’I2’ arba : E2’= R2’I2’+ jX2’I2’; I0 = I1 - I2’
Šaka tarp a ir b vadinama įmagnetinimo šaka. Ja
teka srovė I0. Įmagnetinimo šakos varžos Rm ir Xm sujungtos nuosekliai. Galia I0
2Rm yra t.v. nuostolių galia.
Reaktyvioji galia varžoje Xm naudojama mašinos
įmagnetinimui. Φ
Rotoriaus apkrova mišri – aktyviai induktyvi (sąlyginai)
=const
Jei mašina sukasi, E2 ir X2 priklauso nuo slydimo, yra kintami dydžiai, o R2 yra pastovi
U2’ =0
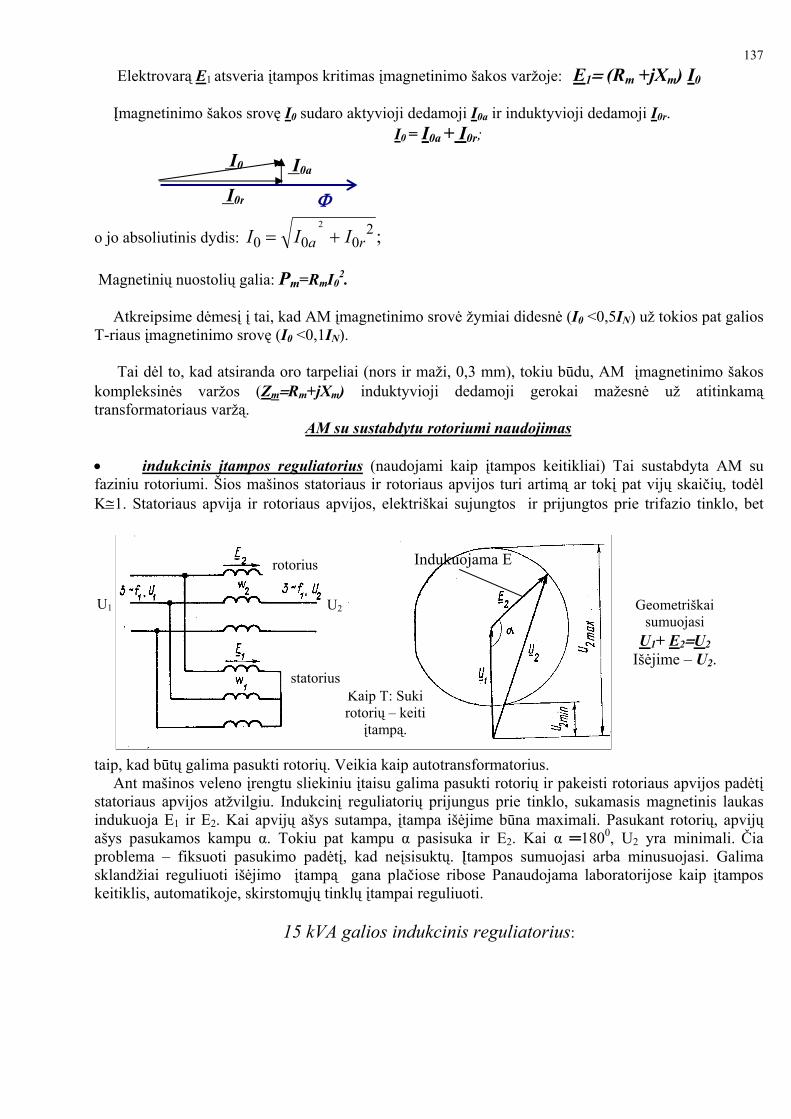
137 Elektrovarą E1 atsveria įtampos kritimas įmagnetinimo šakos varžoje: E1= (Rm +jXm) I0 Įmagnetinimo šakos srovę I0 sudaro aktyvioji dedamoji I0a ir induktyvioji dedamoji I0r.
I0 = I0a + I0r;
I0r Φ
I0a I0
o jo absoliutinis dydis: I I Ia r0 0 022
= + ;
Magnetinių nuostolių galia: Pm=RmI02.
Atkreipsime dėmesį į tai, kad AM įmagnetinimo srovė žymiai didesnė (I0 <0,5IN) už tokios pat galios
T-riaus įmagnetinimo srovę (I0 <0,1IN). Tai dėl to, kad atsiranda oro tarpeliai (nors ir maži, 0,3 mm), tokiu būdu, AM įmagnetinimo šakos
kompleksinės varžos (Zm=Rm+jXm) induktyvioji dedamoji gerokai mažesnė už atitinkamą transformatoriaus varžą.
AM su sustabdytu rotoriumi naudojimas
• indukcinis įtampos reguliatorius (naudojami kaip įtampos keitikliai) Tai sustabdyta AM su faziniu rotoriumi. Šios mašinos statoriaus ir rotoriaus apvijos turi artimą ar tokį pat vijų skaičių, todėl K≅1. Statoriaus apvija ir rotoriaus apvijos, elektriškai sujungtos ir prijungtos prie trifazio tinklo, bet
taip, kad būtų galima pasukti rotorių. Veikia kaip autotransformatorius.
Kaip T: Suki rotorių – keiti
įtampą.
Indukuojama E
Geometriškai sumuojasi
U1+ E2=U2 Išėjime – U2.
rotorius
statorius
U1 U2
Ant mašinos veleno įrengtu sliekiniu įtaisu galima pasukti rotorių ir pakeisti rotoriaus apvijos padėtį statoriaus apvijos atžvilgiu. Indukcinį reguliatorių prijungus prie tinklo, sukamasis magnetinis laukas indukuoja E1 ir E2. Kai apvijų ašys sutampa, įtampa išėjime būna maximali. Pasukant rotorių, apvijų ašys pasukamos kampu α. Tokiu pat kampu α pasisuka ir E2. Kai α 1800, U2 yra minimali. Čia problema – fiksuoti pasukimo padėtį, kad neįsisuktų. Įtampos sumuojasi arba minusuojasi. Galima sklandžiai reguliuoti išėjimo įtampą gana plačiose ribose Panaudojama laboratorijose kaip įtampos keitiklis, automatikoje, skirstomųjų tinklų įtampai reguliuoti.
15 kVA galios indukcinis reguliatorius:

138
Kitaip sujungus apvijas, gaunamas fazės reguliatorius.
• fazės reguliatorius skirtas antrinės įtampos fazei keisti pirminės įtampos atžvilgiu. Čia antrinės įtampos dydis nesikeičia. Tai yra trifazė pasukimo įtaisu (sliekine pavara) sustabdyta asinchroninė mašina su kontaktiniais žiedais. Įtampa prijungiama prie statoriaus apvijos, o gaunama tarp rotoriaus apvijos gnybtų. Čia statoriaus ir rotoriaus apvijos tarp savęs elektriškai nesujungtos. Naudojamas laboratoriniams bandymams. Statoriaus apvija sujungiama žvaigžde arba trikampiu ir prijungiama prie įtampos. Sukamasis laukas indukuoja statoriaus ir rotoriaus apvijose EV. Pasukus
rotorių statoriaus atžvilgiu kampu α, proporcingu kampu rotoriaus apvijose indukuota EV pralenks arba atsiliks nuo statoriaus EV todėl pasukant rotorių, proporcingu kampu pasukami visi antrinės grandinės (rotoriaus) EV –varų ir įtampų vektoriai. Pasukimo kampai matuojami elektriniais laipsniais.
α
A
B C
α a
b
c
U1
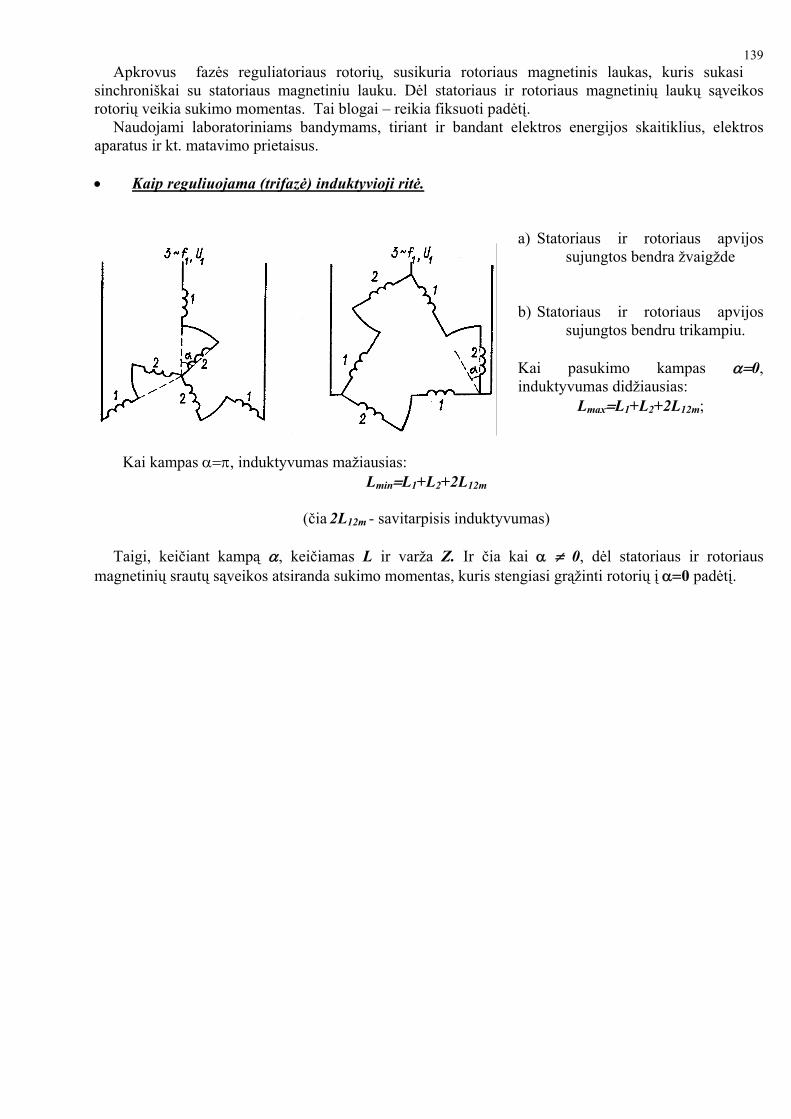
139Apkrovus fazės reguliatoriaus rotorių, susikuria rotoriaus magnetinis laukas, kuris sukasi
sinchroniškai su statoriaus magnetiniu lauku. Dėl statoriaus ir rotoriaus magnetinių laukų sąveikos rotorių veikia sukimo momentas. Tai blogai – reikia fiksuoti padėtį.
Naudojami laboratoriniams bandymams, tiriant ir bandant elektros energijos skaitiklius, elektros aparatus ir kt. matavimo prietaisus.
• Kaip reguliuojama (trifazė) induktyvioji ritė.
a) Statoriaus ir rotoriaus apvijos sujungtos bendra žvaigžde
b) Statoriaus ir rotoriaus apvijos
sujungtos bendru trikampiu. Kai pasukimo kampas α=0, induktyvumas didžiausias:
Lmax=L1+L2+2L12m;
Kai kampas α=π, induktyvumas mažiausias:
Lmin=L1+L2+2L12m
(čia 2L12m - savitarpisis induktyvumas)
Taigi, keičiant kampą α, keičiamas L ir varža Z. Ir čia kai α ≠ 0, dėl statoriaus ir rotoriaus
magnetinių srautų sąveikos atsiranda sukimo momentas, kuris stengiasi grąžinti rotorių į α=0 padėtį.

140Asinchroninė mašina su besisukančiu rotoriumi
Besisukančio ir sustabdyto AM rotoriaus parametrų palyginimas
Jau žinome, kad rotoriaus apvijoje tekančios srovės ir EV-varos dažnis f2 priklauso nuo slydimo.:
f2 = s f1Besisukančio rotoriaus EV-vara:
E2s = 4,44 f2 w 2kw2 Φm = s E2;
Besisukančio rotoriaus sklaidos induktyvioji varža :
X2s = 2π f L2 2 = 2π s f1 L2 = s X2;
- stovinčio (sustabdyto, s=1), rotoriaus EV ir induktyvioji sklaidos varža. Čia E ir X2 2Paneigus rotoriaus apvijoje srovės išstūmimo efektą, besisukančio rotoriaus aktyvioji varža :
R2s = R2= const
AM su besisukančiu rotoriumi pagrindinės lygtys ir atstojamosios schemos
Ką tik akcentavome, kad besisukančio rotoriaus srovė priklauso nuo E2 ir X2, kurie priklauso nuo slydimo s (t.y., kintantys dydžiai) ir nuo R2, kuri yra pastovi:
I EZ
sER jsX
s
s2
2
2
2
2 2= =
+( ); (: s)
I ERs
jX2
22
2
=+( )
;
INaujoji srovės 2 išraiška turi ir kitą fizikinę prasmę: besisukantį rotorių galima pakeisti sustabdytu
rotoriumi, kurio )( 2s
Raktyvioji varža yra kintantis, priklausantis nuo slydimo s, dydis, , o kiti
parametrai išlieka tokie pat, kaip ir asinchroninėje mašinoje su sustabdytu rotoriumi. Pastebėsime, kad rotoriaus matematinis modelis fizikinių reiškinių požiūriu yra neteisingas. Bet juo
yra paprasčiau matematiškai modeliuoti ryšius tarp rotoriaus apvijos elektrinių dydžių.
‘Tada lygtyse vietoje varžos R2 reikia įrašyti (R2‘/s).
U1 = E1 + R1I1 + jX1I1
0 = E2’- (R2’/s) I2’- jX2’I2’ arba : E2’= (R2’/s) I2’+ jX2’I2’; I0 = I1 - I2’

141’Vektorinė diagrama analogiška sustabdytai mašinai, tik varža R čia padalinta iš s. 2
Φ
s
Variklinis režimas
Generatoriaus režimas
E1=E2/
’Asinchroninės mašinos T pavidalo atstojamoji schema: Varžą (R2 /s) galima suskaidyti į dvi
dedamąsias:
s
Elektromagnetinė galia priklausys
Rs
R ss
R22 2
1'' ';= +
− (1)
Šis modelis
vaizduojamas atstojamojoje schemoje:
Nuostoliai rotoriaus
aktyviojoje varžoje
Mechaninė galia priklauso nuo šios varžos. Į ją galima žiūrėti kaip į išorinę
varžą, įjungtą į nejudamo rotoriaus apviją. Šiuo atveju AM dirba kaip T,
apkrautas aktyviąja apkrova. Tai vienintelis kintamas schemos
parametras
T pavidalo schema
12
−ss R '
) varžos dydis priklauso nuo slydimo, vadinasi, nuo AV veleno mechaninės apkrovos.(
12
−ss R 'Pvz., jei variklio veleno apkrovos momentas M =0, tai slydimas s ≅ 0. Tada (2 = ∞), o tai
atitinka variklio t.v. režimą. Jei variklio veleno apkrovos momentas didesnis už sukimo momentą, tai variklio rotorius sustoja (s=
1). Tada ( 12
−ss R '=0), o tai atitinka AV trumpojo jungimo režimą.
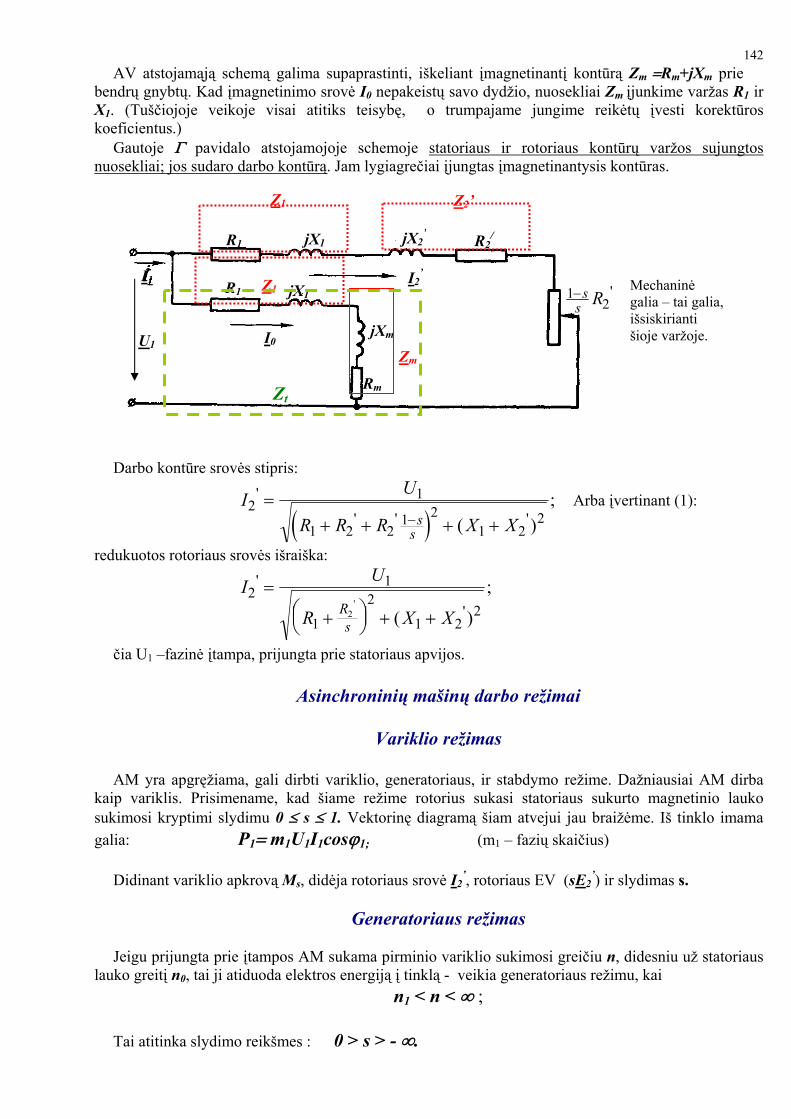
142AV atstojamąją schemą galima supaprastinti, iškeliant įmagnetinantį kontūrą Z =Rm m+jXm prie
bendrų gnybtų. Kad įmagnetinimo srovė I0 nepakeistų savo dydžio, nuosekliai Z įjunkime varžas Rm 1 ir X1. (Tuščiojoje veikoje visai atitiks teisybę, o trumpajame jungime reikėtų įvesti korektūros koeficientus.)
Gautoje Γ pavidalo atstojamojoje schemoje statoriaus ir rotoriaus kontūrų varžos sujungtos nuosekliai; jos sudaro darbo kontūrą. Jam lygiagrečiai įjungtas įmagnetinantysis kontūras.
R1
R1
Rm
R2/
jX1 12
−ss R '
U1
I1 I2’
I0jXm
jX1 jX2’
Z Z ’
Darbo kontūre srovės stipris:
( )I U
R R R X Xss
21
1 2 21 2
1 22
'
' ' '( );=
+ + + +− Arba įvertinant (1):
redukuotos rotoriaus srovės išraiška:
I U
R X XRs
21
1
2
1 222
'
''
( )
;=
+⎛⎝⎜
⎞⎠⎟ + +
čia U1 –fazinė įtampa, prijungta prie statoriaus apvijos.
Asinchroninių mašinų darbo režimai
Variklio režimas
AM yra apgręžiama, gali dirbti variklio, generatoriaus, ir stabdymo režime. Dažniausiai AM dirba kaip variklis. Prisimename, kad šiame režime rotorius sukasi statoriaus sukurto magnetinio lauko sukimosi kryptimi slydimu 0 ≤ s ≤ 1. Vektorinę diagramą šiam atvejui jau braižėme. Iš tinklo imama galia: P1= m1U1I1cosϕ1; (m1 – fazių skaičius)
Didinant variklio apkrovą Ms, didėja rotoriaus srovė I2
’, rotoriaus EV (sE2’) ir slydimas s.
Generatoriaus režimas
Jeigu prijungta prie įtampos AM sukama pirminio variklio sukimosi greičiu n, didesniu už statoriaus
lauko greitį n0, tai ji atiduoda elektros energiją į tinklą - veikia generatoriaus režimu, kai n1 < n < ∞ ;
Tai atitinka slydimo reikšmes : 0 > s > - ∞.
21
Z1
Zm
Mechaninė galia – tai galia, išsiskirianti šioje varžoje.
Zt
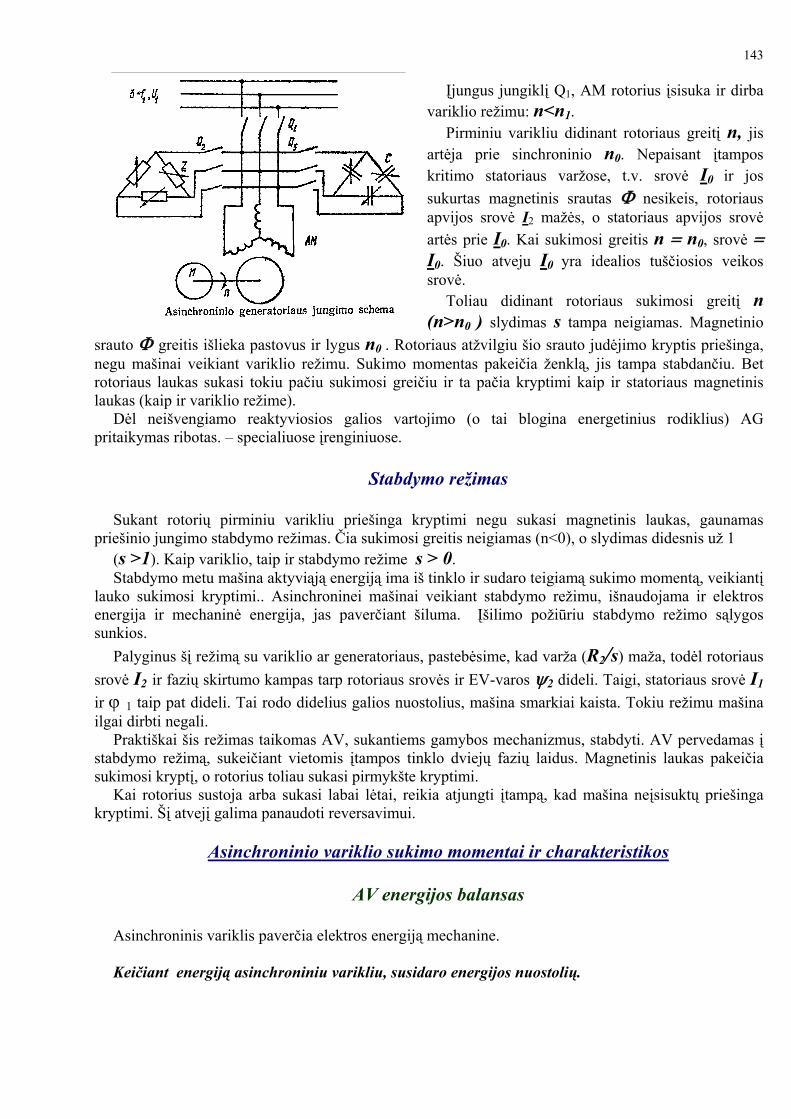
143 Įjungus jungiklį Q1, AM rotorius įsisuka ir dirba
variklio režimu: n<n1. Pirminiu varikliu didinant rotoriaus greitį n, jis
artėja prie sinchroninio n0. Nepaisant įtampos kritimo statoriaus varžose, t.v. srovė I0 ir jos sukurtas magnetinis srautas Φ nesikeis, rotoriaus apvijos srovė I2 mažės, o statoriaus apvijos srovė artės prie I0. Kai sukimosi greitis n = n0, srovė = I0. Šiuo atveju I0 yra idealios tuščiosios veikos srovė.
Toliau didinant rotoriaus sukimosi greitį n (n>n0 ) slydimas s tampa neigiamas. Magnetinio
srauto Φ greitis išlieka pastovus ir lygus n0 . Rotoriaus atžvilgiu šio srauto judėjimo kryptis priešinga, negu mašinai veikiant variklio režimu. Sukimo momentas pakeičia ženklą, jis tampa stabdančiu. Bet rotoriaus laukas sukasi tokiu pačiu sukimosi greičiu ir ta pačia kryptimi kaip ir statoriaus magnetinis laukas (kaip ir variklio režime).
Dėl neišvengiamo reaktyviosios galios vartojimo (o tai blogina energetinius rodiklius) AG pritaikymas ribotas. – specialiuose įrenginiuose.
Stabdymo režimas
Sukant rotorių pirminiu varikliu priešinga kryptimi negu sukasi magnetinis laukas, gaunamas
priešinio jungimo stabdymo režimas. Čia sukimosi greitis neigiamas (n<0), o slydimas didesnis už 1 (s >1). Kaip variklio, taip ir stabdymo režime s > 0. Stabdymo metu mašina aktyviąją energiją ima iš tinklo ir sudaro teigiamą sukimo momentą, veikiantį
lauko sukimosi kryptimi.. Asinchroninei mašinai veikiant stabdymo režimu, išnaudojama ir elektros energija ir mechaninė energija, jas paverčiant šiluma. Įšilimo požiūriu stabdymo režimo sąlygos sunkios.
Palyginus šį režimą su variklio ar generatoriaus, pastebėsime, kad varža (R2/s) maža, todėl rotoriaus srovė I2 ir fazių skirtumo kampas tarp rotoriaus srovės ir EV-varos ψ2 dideli. Taigi, statoriaus srovė I1 ir ϕ 1 taip pat dideli. Tai rodo didelius galios nuostolius, mašina smarkiai kaista. Tokiu režimu mašina ilgai dirbti negali.
Praktiškai šis režimas taikomas AV, sukantiems gamybos mechanizmus, stabdyti. AV pervedamas į stabdymo režimą, sukeičiant vietomis įtampos tinklo dviejų fazių laidus. Magnetinis laukas pakeičia sukimosi kryptį, o rotorius toliau sukasi pirmykšte kryptimi.
Kai rotorius sustoja arba sukasi labai lėtai, reikia atjungti įtampą, kad mašina neįsisuktų priešinga kryptimi. Šį atvejį galima panaudoti reversavimui.
Asinchroninio variklio sukimo momentai ir charakteristikos
AV energijos balansas
Asinchroninis variklis paverčia elektros energiją mechanine. Keičiant energiją asinchroniniu varikliu, susidaro energijos nuostolių.
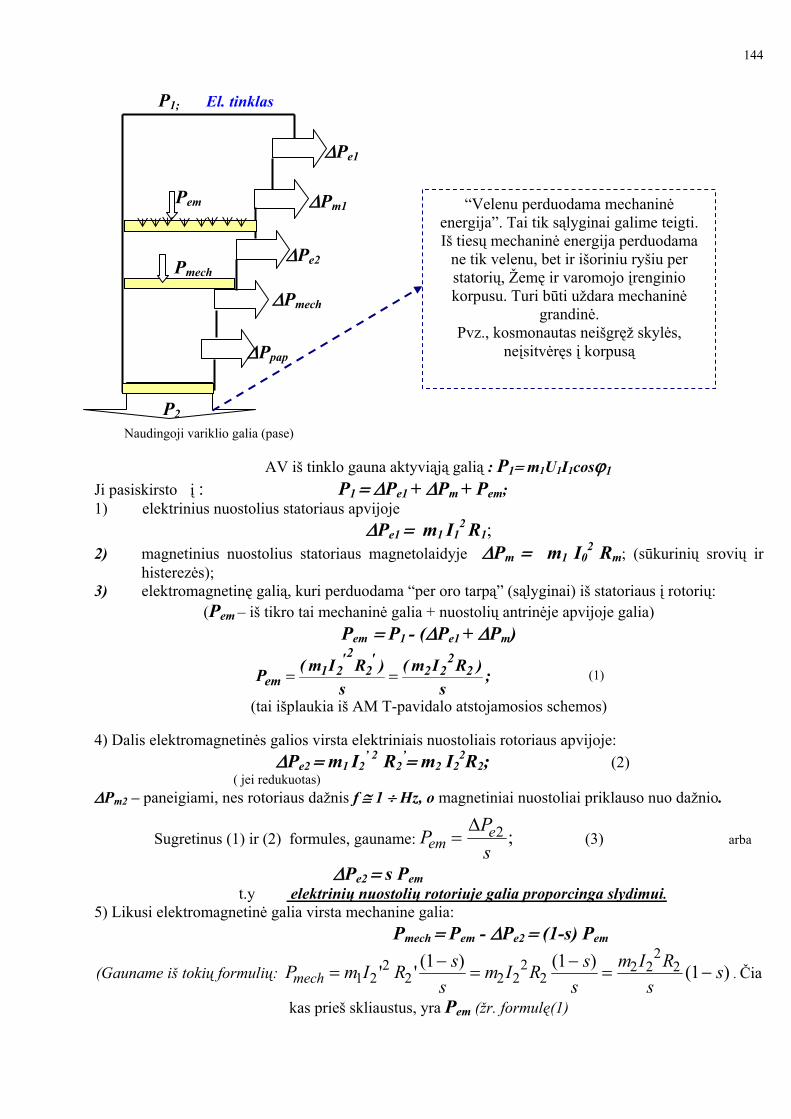
144
P1; El. tinklas
ΔPe1
AV iš tinklo gauna aktyviąją galią : P1= m1U1I1cosϕ1
Ji pasiskirsto į : P1 = ΔPe1 + ΔPm + Pem; 1) elektrinius nuostolius statoriaus apvijoje
ΔPe1 = m1 I12 R1;
2) magnetinius nuostolius statoriaus magnetolaidyje ΔPm = m1 I02 Rm; (sūkurinių srovių ir
histerezės); 3) elektromagnetinę galią, kuri perduodama “per oro tarpą” (sąlyginai) iš statoriaus į rotorių:
(Pem – iš tikro tai mechaninė galia + nuostolių antrinėje apvijoje galia) Pem = P1 - (ΔPe1 + ΔPm)
P m I Rs
m I Rsem = =( ) ( ) ;
' '1 2
22 2 2
22 (1)
(tai išplaukia iš AM T-pavidalo atstojamosios schemos)
4) Dalis elektromagnetinės galios virsta elektriniais nuostoliais rotoriaus apvijoje: ΔPe2 = m1 I2
’ 2 R2
’= m2 I22R2; (2)
( jei redukuotas) ΔPm2 – paneigiami, nes rotoriaus dažnis f ≅ 1 ÷ Hz, o magnetiniai nuostoliai priklauso nuo dažnio.
Sugretinus (1) ir (2) formules, gauname: PPseme=
Δ 2 ; (3) arba
ΔPe2 = s Pem t.y elektrinių nuostolių rotoriuje galia proporcinga slydimui.
5) Likusi elektromagnetinė galia virsta mechanine galia: Pmech = Pem - ΔPe2 = (1-s) Pem
(Gauname iš tokių formulių: P m I R ss
m I R ss
m I Rs
smech =−
=−
= −1 22
2 2 22
22 2
221 1 1' ' ( ) ( ) ( ) . Čia
kas prieš skliaustus, yra Pem (žr. formulę(1)
ΔPm1Pem
ΔPe2Pmech
ΔPmech
ΔPpap
“Velenu perduodama mechaninė energija”. Tai tik sąlyginai galime teigti. Iš tiesų mechaninė energija perduodama
ne tik velenu, bet ir išoriniu ryšiu per statorių, Žemę ir varomojo įrenginio korpusu. Turi būti uždara mechaninė
grandinė. Pvz., kosmonautas neišgręž skylės,
neįsitvėręs į korpusą
P2
Naudingoji variklio galia (pase)

145Mechaninius nuostolius ΔPmech lemia guolių trintis, ventiliaciniai nuostoliai. Papildomus galios
nuostolius ΔPpap sudaro magnetinio lauko pulsacija statoriaus ir rotoriaus dantyse bei nuostoliai, kuriuos sukelia sklaidos srautai mašinos konstrukcinėse dalyse.
Likusi dalis yra naudingoji galia P2. Galima užrašyti Pmech = P + ΔP2 mech + ΔPpap.
η = = −PP
PP
2
1 11 Δ ;Variklio naudingumo koeficientas
Čia variklio suminiai nuostoliai: ΔP = ΔPe1 + ΔPm1 + ΔPe2 + ΔPmech + ΔPpap Vidutinės ir didelės galios AV η = 0,83-0,95, mikrovariklių η=0,1 – 0,3.
Asinchroninės mašinos sukimo momentai
Variklio sukimo momentas yra vienas svarbiausių jo mechaninių dydžių. AV elektromagnetinį momentą (mechaninį sukimo momentą) lemia rotoriaus apvijos srovės ir oro
tarpo suminio magnetinio lauko sąveika. Jis proporcingas elektromagnetinei galiai:
;0Ω
= emPM (4)
čia Ω0 – sinchroninis kampinis sukimo greitis, SI sistemoje [rad/s],[1/s], tai tas pats, kaip ir [Hz].
;60
2 00
nπ=Ω (aps/min) ; arba taip: Ωčia čia n0 0 = 2π n ; tada čia n0 0 (aps/s) ) - statoriaus
(suminio) magnetinio lauko (pagrindinės harmonikos) (sinchroninis) kampinis greitis – mechaninis
dydis; (arba galėtų būti ir šitaip: ;Ω
= mechPM ;Ω= MPmechiš čia tada čia Ω - rotoriaus mechaninis
kampinis sukimosi greitis)
n fp0
60= ;Kadangi sinchroninis greitis (aps/min),
;260
6020 pp
fp
f ωππ===Ωtai (5)
čia ω - statoriaus (tinklo) srovės ir įtampos kampinis dažnis
PPseme=
Δ 2 ;Į (4) lygtį įstatome elektromagnetinės galios išraišką ( iš ankstesnio psl. : (3))
;0
/2
2/21
0
2
sRIm
sPM e
Ω=
ΩΔ
=
T.y. AV elektromagnetinis momentas proporcingas elektrinių nuostolių rotoriaus apvijoje galiai Į paskutinę formulę įstatykime redukuotos rotoriaus srovės išraišką (iš 3 psl.) ir kampinio greičio iš (5):

146
( )][;
2 22
/1
22
/
1
/22
11Nm
XXs
RRf
sR
pUmM
⎥⎥⎦
⎤
⎢⎢⎣
⎡++⎟⎟
⎠
⎞⎜⎜⎝
⎛+
≅
π
M≡U2 !!! Jei įtampa sumažėja 20%, tai momentas M sumažėja beveik per pusę. s priklauso nuo rotoriaus R ; Mkritinis 2 max nuo rotoriaus varžos R2 nepriklauso. Nuo šios varžos priklauso tik Mmax vieta charakteristikoje ERealiai varžas R1 ; R2
‘ sužinome iš t.v. ir tr.j. bandymų duomenų; Jei čia įrašyti slydimo s išraišką, gautume mechaninės charakteristikos M(n) lygtį. Šią išraišką atitinka variklio elektromagnetinio momento priklausomybės nuo slydimo grafikas M=f(s) Matome, kad srovė monotoniškai auga iki savo max reikšmės, tuo metu kai slydimas artėja prie ± ∞. Kodėl,
didėjant slydimui srovei tebeaugant, momentas nuo maksimalaus pradeda mažėti, juk magnetinis laukas tas pats? Todėl, kad srovė vis labiau vėluoja, keičiasi jos fazė, didėjant slydimui. Prisiminkime
formulę I ERs
jX2
22
2
=+( )
; Srovę nulemia labiau induktyvioji varža. Srovė vis labiau vėluoja, magnetinis
laukas užbėgs į priekį, o kai s→ ∞, magnetinis laukas nebesąveikauja su srove, momento nebebus. Pagal šią formulę matematiškai sakome, kad R2 mažėja. Tačiau iš tikrųjų keičiasi induktyvioji varža X2).
Šią išraišką kartais vadina mechanine charakteristika, nors labiau įprasta mechanine ch-ka vadinti
priklausomybę n=f(M) arba M=f(n); Abu pavadinimus galima laikyti
lygiaverčiais. Paveiksle matome, kad neigiamas sukimo momentas gaunamas, dirbant G režimu(s<0).
Jei s=0, tai I’2=0 ir M=0.
Esant tam tikram slydimui sC, sukimo momentas pasiekia max: Mmax. Taigi, didinant s , nuo 0 iki sC, sukimo momentas didėja nuo 0 iki Mmax. Toliau didinant slydimą, M mažėja, o srovė I2
’ visą laiką didėja nes tampa vis labiau reaktyvi. Aktyvioji srovės I2
’ dedamoji , didėjant slydimui, iš pradžių didėja,
n0
b)
1≈U , skiriasi įtampos kritimu varžose R1 1 ir X 1.Todėl jei rašytume lygybę, reikėtų įvesti pataisos koeficientus.
a)
+∞ -∞

147o toliau mažėja (pamatysime apskritiminėje diagramoje).
Sukimo momentas proporcingas aktyviajai srovės I2a dedamajai. Tuo galima paaiškinti kreivės M(s) kitimo pobūdį.
Jei ašyse M ir n, tai ch-ka M(n), atrodys taip (žr. 7 psl.pav.b)): Maksimalus sukimo momentas proporcingas įtampos kvadratui, nepriklauso nuo rotoriaus
aktyviosios varžos R2 (atvirkščiai proporcingai priklauso nuo X2) ir gaunamas, esant tam tikram slydimui sC.
Taigi, siekiant padidinti maksimalų sukimo momentą, varža X2 mažinama. Tuo tikslu rotoriaus grioveliai atidaromi. Sumažėja rotoriaus griovelių sklaidos srautas, magnetinis laidis λ mažėja, induktyvumas L mažėja, taigi, ir varža X mažėja (Prisiminkime priklausomybes: ↓X2 . L=2π f L↓ ; ↓L=λ↓w2;)
Maksimalaus sukimo momento santykis su vardiniu sukimo momentu nusako variklio perkrovimo
galimybę ir vadinamas variklio perkrautumo koeficientu
k MMm
N= = ÷max , ,1 7 3 0
Tai galioja bendros paskirties pramoniniams varikliams. Jų slydimas sC = 0,06 - 0,5
AV paleidimo momentas Prijungus AV prie įtampos, atsiranda rotorių sukantis sukimo momentas, vadinamas paleidimo
momentu. Variklio paleidimo momentu n2=0, ir s=1. Tada išvystomas paleidimo momentas įgys pavidalą:
( ) ( )M m pU R
f R R X Xp =
+ + +⎡⎣⎢
⎤⎦⎥
1 12
2
1 22
1 22
2
'
' 'π
Mmax
n
Mp
n0 nN nkr
M MN
Paleidimo momentas Mp proporcingas tinklo įtampos
kvadratui, priklauso nuo rotoriaus varžų. Didinant rotoriaus varžą ’R2 slydimas sC, kuriam esant gaunamas Mmax, didėja. Kai sC =1,
paleidimo momentas maksimalus (Mp = Mmax.). Tai bus tada, kai ’ ’R2 = X2 .
Toliau didinant rotoriaus varžą R2’, paleidimo momentas mažėja. Normaliai rotoriaus aktyvioji varža
yra gerokai mažesnė už rotoriaus induktyviąją sklaidos varžą, todėl paleidimo momentui padidinti stengiamasi paleidžiant variklį rotoriaus aktyviąją varžą padidinti.
Varikliui įsisukus, didelė aktyvioji rotoriaus apvijos varža nenaudinga.
AV darbo charakteristikos
Tai galios P1, sukimosi greičio n (arba slydimo s), elektromagnetinio sukimo momento M, naudingumo koeficiento η, galios koeficiento cosϕ priklausomybės nuo variklio atiduodamos (naudingosios) galios P , esant U2 1 = const ir f= const.

148Didinant apkrovą P2, variklio greitis
mažėja, o slydimas didėja beveik tiesiniu dėsniu. Sukimo momentas taip pat beveik tiesiškai priklauso nuo P . 2
Galios ir naudingumo koeficientai didžiausi, kai naudingoji galia artima vardinei galiai P2N.
I ir cosϕ (ir nuo jų priklausantis P1 1)
prasideda ne nuo 0, bet yra pakilę. Kodėl? Tai dėl nuostolių tuščiojoje veikoje: kai P2=0, P1≠ 0, nes jau iškart teka tam tikra srovė- nėra režimo, kad netekėtų srovė. O jei teka kažkokia srovė, bus ir kažkoks cosϕ. Tie nuostoliai pasidarys = 0 jau generatoriaus režime, (pamatysime vėliau, žr. į žemiau pateikiamą AM apskritiminę diagramą)).
Iš darbo ch-kų galima rasti visus variklio darbą apibūdinančius dydžius, esant įvairioms variklio apkrovoms.
Laboratorijoje atlikus vien tik t.v. ir tr. j. bandymus, pagal rezultatus galima sudaryti apskritiminę
diagramą ir iš jos nustatyti srovę, galią, galios nuostolius, slydimą, sūkių dažnį, elektromagnetinius sukimo momentus, naudingumo ir galios koeficientus, esant įvairioms apkrovoms. Tais duomenimis remiantis, sudaromos darbo ir mechaninės charakteristikos.
Asinchroninės mašinos srovių apskritiminė diagrama
Darbo ir mechanines charakteristikas daug paprasčiau sudaryti ir užtruks mažiau laiko , nei jas gauti
laboratorijose eksperimentiškai. Trūkumas – srovių diagrama neatspindi AM parametrų pasikeitimo, kintant apkrovai ir darbo režimui. Neįvertinami 1) srovės išstūmimo efektas (iš tiesų rotoriaus srovės dažnis kinta plačiose ribose, dažniui augant, srovė išstumiama į paviršių (daromi gilūs, dvigubi grioveliai dėl geresnio paleidimo momento), 2) prisotinimas ir kt. Sakoma, kad srovių diagrama sudaroma mašinai su pastoviais parametrais.
Susipažinsime su supaprastinta srovių apskritimine diagrama. Pavyzdžiui, turime grandinę iš R, L. Teka srovė I, ji sukelia įtampos kritimus U ir Ua L. Sudarome įtampų trikampį. Padalinus trikampio
kraštines iš X, gausime trikampį HDC, kur statinis HD - tai srovės vektorius. Nubrėžkime įtampos vektorių, sudarantį kampą ϕ su srove. Keičiantis aktyviajai varžai intervale nuo 0 iki ∞ keisis srovė ir trikampio statiniai, tačiau įžambinė nesikeis ir bus lygi U/X. Nepriklausomai nuo apkrovos didumo, trikampis lieka status. Srovės vektoriaus viršūnė brėš pusę apskritimo variklio režime (jei prisidėtų ir generatoriaus režimas – būtų pilnas apskritimas.
ϕ ϕ
(:X)
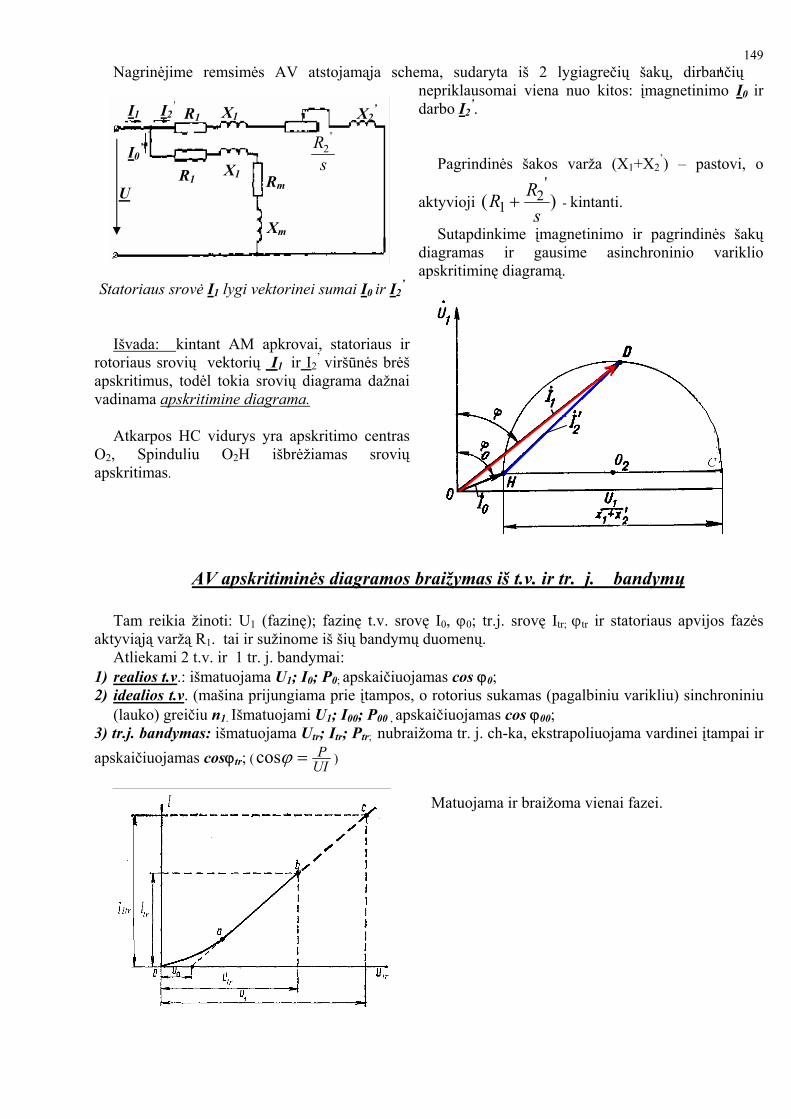
149Nagrinėjime remsimės AV atstojamąja schema, sudaryta iš 2 lygiagrečių šakų, dirbančių
nepriklausomai viena nuo kitos: įmagnetinimo I0 ir darbo I ’.
X2’I1 I2
’
I0’
U
R1
R1
X1
X1 Rm
Xm
Rs2
'
2
’Pagrindinės šakos varža (X +X1 2 ) – pastovi, o
aktyvioji ('
R R )s12+ - kintanti.
Sutapdinkime įmagnetinimo ir pagrindinės šakų diagramas ir gausime asinchroninio variklio apskritiminę diagramą.
’ Statoriaus srovė I lygi vektorinei sumai I1 0 ir I2 Išvada: kintant AM apkrovai, statoriaus ir
rotoriaus srovių vektorių I ’ 1 ir I2 viršūnės brėš
apskritimus, todėl tokia srovių diagrama dažnai vadinama apskritimine diagrama.
Atkarpos HC vidurys yra apskritimo centras
O , Spinduliu O2 2H išbrėžiamas srovių apskritimas.
AV apskritiminės diagramos braižymas iš t.v. ir tr. j. bandymų
Tam reikia žinoti: U1 (fazinę); fazinę t.v. srovę I0, ϕ ; tr.j. srovę I ϕ0 tr; tr ir statoriaus apvijos fazės
aktyviąją varžą R1. tai ir sužinome iš šių bandymų duomenų. Atliekami 2 t.v. ir 1 tr. j. bandymai:
1) realios t.v.: išmatuojama U ; I1 0; P0; apskaičiuojamas cos ϕ0; 2) idealios t.v. (mašina prijungiama prie įtampos, o rotorius sukamas (pagalbiniu varikliu) sinchroniniu
(lauko) greičiu n Išmatuojami U ; I1. 1 00; P apskaičiuojamas cos ϕ00 , 00; 3) tr.j. bandymas: išmatuojama U ; I ; Ptr tr tr; nubraižoma tr. j. ch-ka, ekstrapoliuojama vardinei įtampai ir apskaičiuojamas cosϕ cosϕ = P
UI ) tr; (
Matuojama ir braižoma vienai fazei.
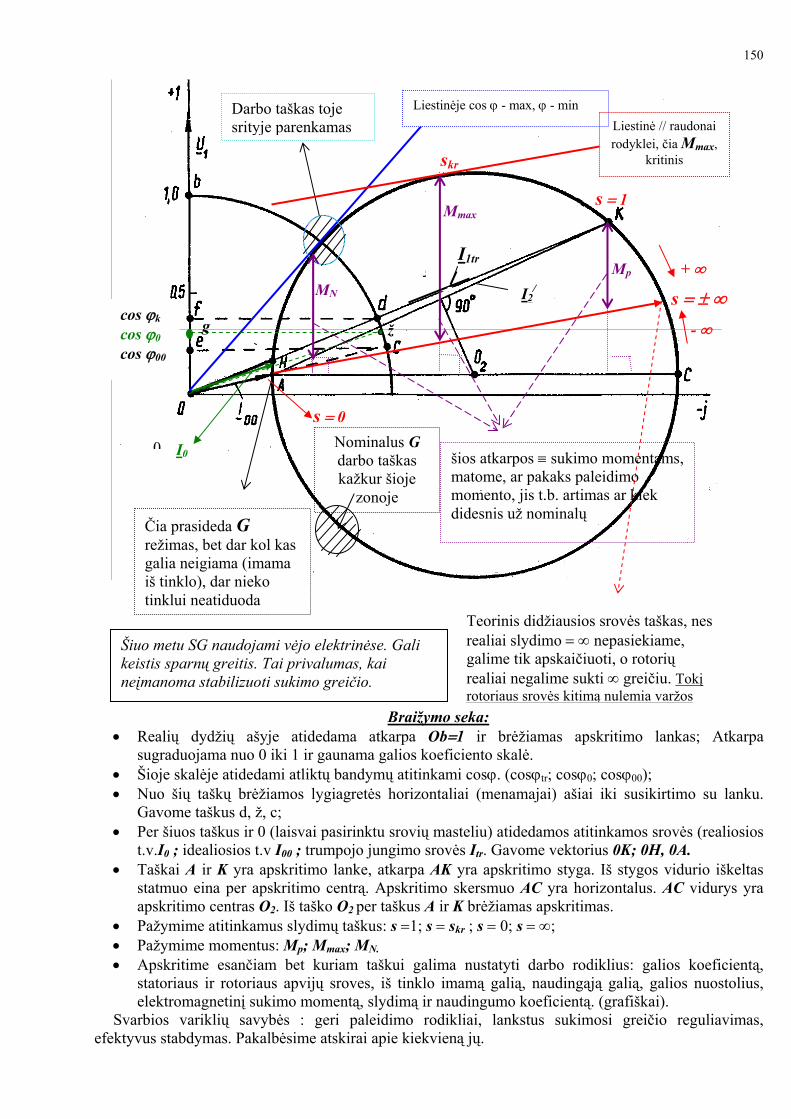
150
s=1
I1tr
Liestinėje cos ϕ - max, ϕ - min Darbo taškas toje srityje parenkamas
Mmax
Mp MN
Liestinė // raudonai rodyklei, čia Mmax,
kritinis skr
s = 1
Braižymo seka: • Realių dydžių ašyje atidedama atkarpa Ob=1 ir brėžiamas apskritimo lankas; Atkarpa
sugraduojama nuo 0 iki 1 ir gaunama galios koeficiento skalė. • Šioje skalėje atidedami atliktų bandymų atitinkami cosϕ. (cosϕtr; cosϕ0; cosϕ00); • Nuo šių taškų brėžiamos lygiagretės horizontaliai (menamajai) ašiai iki susikirtimo su lanku.
Gavome taškus d, ž, c; • Per šiuos taškus ir 0 (laisvai pasirinktu srovių masteliu) atidedamos atitinkamos srovės (realiosios
t.v.I0 ; idealiosios t.v I00 ; trumpojo jungimo srovės Itr. Gavome vektorius 0K; 0H, 0A. • Taškai A ir K yra apskritimo lanke, atkarpa AK yra apskritimo styga. Iš stygos vidurio iškeltas
statmuo eina per apskritimo centrą. Apskritimo skersmuo AC yra horizontalus. AC vidurys yra apskritimo centras O2. Iš taško O2 per taškus A ir K brėžiamas apskritimas.
• Pažymime atitinkamus slydimų taškus: s =1; s = skr ; s = 0; s = ∞; • Pažymime momentus: Mp; Mmax; MN. • Apskritime esančiam bet kuriam taškui galima nustatyti darbo rodiklius: galios koeficientą,
statoriaus ir rotoriaus apvijų sroves, iš tinklo imamą galią, naudingąją galią, galios nuostolius, elektromagnetinį sukimo momentą, slydimą ir naudingumo koeficientą. (grafiškai).
Svarbios variklių savybės : geri paleidimo rodikliai, lankstus sukimosi greičio reguliavimas, efektyvus stabdymas. Pakalbėsime atskirai apie kiekvieną jų.
s = ± ∞
- ∞
+ ∞
cos ϕk
cos ϕ0
cos ϕ00
Teorinis didžiausios srovės taškas, nes realiai slydimo = ∞ nepasiekiame, galime tik apskaičiuoti, o rotorių realiai negalime sukti ∞ greičiu. Tokį rotoriaus srovės kitimą nulemia varžos
šios atkarpos ≡ sukimo momentams, matome, ar pakaks paleidimo momento, jis t.b. artimas ar kiek didesnis už nominalų
Čia prasideda G režimas, bet dar kol kas galia neigiama (imama iš tinklo), dar nieko tinklui neatiduoda
Nominalus G darbo taškas kažkur šioje
zonoje
Šiuo metu SG naudojami vėjo elektrinėse. Gali keistis sparnų greitis. Tai privalumas, kai neįmanoma stabilizuoti sukimo greičio.
0
s = 0
ž g
I0
I2/

151
Asinchroninių variklių paleidimas
Prijungus AV prie įtampos, jame vyksta pereinamasis procesas. Be periodinės kintamosios srovės, atsiranda aperiodinė gęstančioji nuolatinė dedamoji. Po kelių periodinės srovės dedamosios periodų aperiodinė srovės dedamoji gerokai sumažėja. Srovės dedamosios sukuria savus magnetinius laukus, dėl kurių sąveikos atsiranda atitinkamos elektromagnetinio sukimo momento dedamosios. Kadangi pereinamojo proceso laiko konstanta maža ir pereinamasis procesas per kelis periodus užgęsta, tai jis žymesnės įtakos paleidimui neturi.
Nagrinėsime variklio paleidimo procesą nusistovėjusiame režime. Tai bus statinės charakteristikos M=f(s) ir I1=f(s). Iš jų randama paleidimo momentas ir paleidimo srovė.
Variklio paleidimo procesą apibūdina šie dydžiai: MM
p
N1. Paleidimo momento santykis ;
II
p
N2. Paleidimo srovės santykis ;
3. Paleidimo laikas tp ; 4. energijos nuostoliai paleidimo metu Wp.
AV paleidimo proceso pradžia analogiška tr.j. režimui, todėl įmagnetinimo srovės galima nepaisyti (I0≈0).
Iš AM atstojamosios schemos (paneigus įmagnetinimo šaką) galima užrašyti:
( ) ( )I U
R R X Xp
'
' ';=
+ + +
1
1 22
1 22
(1)
Mm p I R
fpp= 1
22
12( )
;'
πir (žr. 26 psl. momento lygtį, ir prie s=1. Ten buvo
taip: pfs
sRImM π2;1; 0
0
'2
2'21 =Ω=
Ω= ; čia p- polių porų skaičius)
(tai išplaukia iš momento priklausomybės nuo slydimo formulės atvejui, kai s =1) Iš (1) matyti, kad paleidimo srovę galima mažinti 2 būdais:
1. mažinant tinklo įtampą U ; 12. didinant mašinos varžas.
Sumažinus paleidimo srovę, sumažėja energijos nuostoliai, tuo pačiu ir variklio įšilimas paleidimo metu. Tačiau sumažėja ir paleidimo momentas, kuris proporcingas paleidimo srovės kvadratui. Paleidimo momentui Mp padidinti į rotoriaus grandinę galima įjungti papildomą rezistorių, bet dėl to padidėja elektriniai galios nuostoliai. Todėl, varikliui įsisukus, iš rotoriaus grandinės rezistorius turi būti išjungtas. Ši problema varikliuose su faziniu rotoriumi ir narveliniame rotoriuje sprendžiama skirtingai.
1. Variklio su faziniu rotoriumi paleidimas:
Rp

152
Į rotoriaus grandinę per žiedų – šepečių kontaktą įjungiamas paleidimo reostatas. Paleidimo metu reostato varža didžiausia. Variklio rotoriui įsisukant, varža palaipsniui mažinama. Pasiekus vardinį režimą, rotoriaus žiedai sujungiami trumpai. Pastaruoju metu dar gaminami AV rotoriai, veikiantys su stipriu srovės išstūmimo efektu. Šis efektas trumpai sujungto rotoriaus apvijoje padidina rotoriaus aktyviąją varžą, vadinasi, ir paleidimo momentą. Tam daromi rotoriai su giliais grioveliais, dvigubu narveliu ir masyviuose feromagnetiniuose rotoriuose.
Matome 4 pakopų paleidimo procesą, esant pastoviam apkrovos momentui. (M =const); staip pat matome paleidimo proceso statoriaus srovės kitimo grafiką. AV, kurių galia siekia šimtus
KW ir daugiau, naudojami 2-3 pakopų paleidimo reostatai. 2. Tiesioginis paleidimas:
Paprasčiausias būdas – prijungti AV prie vardinės įtampos. Šiuo atveju paleidimo srovė Ip = (4-7)IN.
Tiesioginis paleidimas leistinas, jei paleidimo metu tinklo įtampos kritimas neviršija 10 - 15% tinklo vardinės įtampos. Jeigu elektros energijos tinklas nedidelės galios palyginant su elektros variklio galia, o įtampos kritimas tinkle viršija 15%, tai variklis paleidžiamas pažeminant variklį maitinančią įtampą.
Įtampą pažeminti galima naudojant: • Reaktorius; • Autotransformatorius; • Perjungiant variklio apviją iš trikampio į žvaigždę.
Atkreipsime dėmesį į tai, kad sukimo momentas tiesiog proporcingas įtampos kvadratui U2, todėl įtampą sumažinus 2 kartus, sukimo momentas sumažės 4 kartus. Pažeminta įtampa varikliai paleidžiami be apkrovos arba esant nedidelei apkrovai. Aptarsime atskirai :
3. Paleidimas naudojant reaktorius (induktyviąsias varžas)
Jie įjungiami nuosekliai statoriaus apvijai. Dėl įtampos kritimo
reaktoriuose variklis gauna pažemintą įtampą. Paleidimo srovė sumažėja. Reaktoriai parenkami taip, kad paleidimo srovė būtų ne daugiau kaip 2 – 2,5 karto didesnė už vardinę. Šiuo būdu paleidimo srovę galima sumažinti 1,66 – 3,5 karto palyginti su
tiesioginio paleidimo srove, o paleidimo momentas sumažėja 2,5 – 12 kartų. Šis paleidimas naudojamas, kai variklio apkrova paleidimo metu nedidelė.
2M≡U ; Jei Ip sumažės↓ 2 kartus, tai U sumažės↓ 2 kartus, o paleidimo momentas Mp sumažės ↓4 kartus. Jungiamos reaktyvios induktyviosios varžos, o ne aktyviosios srovei mažinti todėl, kad tada būtų dideli aktyviosios energijos nuostoliai. O jei įjungtume talpines, tai paleidimo srovė dar padidėtų, nes variklis turi savo XL. Tada varžos susikompensuotų, atstojamoji Z sumažėtų, o srovė dar padidėtų . Čia
I UZ
↓ =↑
;tikslas – padidinti Z, kad sumažėtų Ip.

1534. Paleidimas naudojant autotransformatorių
Įtampai sumažinti ir paleidimo srovei apriboti galima naudoti
trifazį autotransformatorių. Pradžioje įjungiamas 1 jungiklio padėtimi auto–T, statorius maitinamas pažeminta įtampa. Varikliui įsisukus, jungiklis pervedamas į 2 padėtį., taip statorius prijungiamas prie vardinės įtampos. Paleidimo momentas proporcingas įtampos kvadratui.
Ip sumažės ↓ m kartų, bet ir M sumažės ↓ m kartų.
5. Paleidimas, perjungiant statoriaus apviją Sujungiant statoriaus apviją žvaigžde, o paskui
perjungiant trikampiu, galima paleisti tuos variklius, kurių statoriaus apvijos normaliam darbui jungiamos trikampiu.
Įjungimo metu variklio apvijos gauna 3 kartų mažesnę įtampą, tai apvijomis tekės 3 kartų mažesnės fazinės srovės. Paleidimo srovė sumažės 3 kartus.
Tačiau paleidimo momentas sumažėja taip pat 3 kartus.
AV sukimosi greičio reguliavimas
Tai yra jo rotoriaus sukimosi greičio keitimas, esant pastoviai apkrovai (kai variklis išvysto pastovų momentą.
Pagrindinis AV trūkumas – tai greičio reguliavimo sunkumai.
n n s s fp
s= − = −0 1 60 1( ) ( )s n nn
=−0
0;Iš slydimo formulės : išreiškiame ;
Iš čia matome, kad reguliuoti greitį galima, keičiant: 1. polių porų skaičių p (narveliniams varikliams); 2. tinklo dažnį f; 3. rotoriaus slydimą s (varikliams su faziniu rotoriumi). Slydimą s galima keisti:
a) keičiant maitinimo įtampą; b) sudarant rotoriuje papildomą slydimo dažnio EV; c) maitinant statoriaus apviją kintamosios įtampos impulsais.
1. AV greičio reguliavimas, keičiant polių porų skaičių
galimas, perjungiant statoriaus apviją. Kiekviena apvijos fazė suskirstoma į 2 dalis, kurios gali būti jungiamos lygiagrečiai arba nuosekliai. Jei bus sujungta //, susidarys viena polių pora ir greitis bus 3000 aps/min. Jei nuosekliai – susidarys 2 polių poros, greitis bus 1500 aps/min.

154
Dviguba žvaigždė
Dviguba žvaigždė
Ms
Jei reikia 4 greičių AV, naudojamos 2 statoriaus trifazės apvijos (6 ritės), o kiekviena jų dar gali būti perjungiama skirtingiems greičiams. Greitis reguliuojamas šuoliais, konstrukcija speciali.
Tai tinka narveliniam rotoriui, nes čia susidaro tiek polių, kiek jų turi statoriaus sukamasis magnetinis laukas. Pramonė gamina 2, 3,4 sukimosi greičių AV. Šios savybės neturi fazinis rotorius, todėl reguliuojant šiuo būdu, vienu metu reikėtų perjungti ir
statoriaus ir rotoriaus apvijas. Konstrukcija tampa sudėtinga. 2. AV greičio reguliavimas, keičiant tinklo įtampą.
Šiuo būdu apsisukimų greitį galima tik mažinti.
Sukimo momentas M ≡ U2 proporcingas tinklo įtampos kvadratui .
Mažinant tinklo įtampą, keičiasi AV mechaninė ch-ka ir
slydimas s. Šiuo būdu slydimą galima keisti
nuo 0 iki sC.
Kritinis slydimas sC išlieka pastovus.
Ypač efektyviai slydimas keičiasi padidinus rotoriaus aktyviąją varžą R2. a) pvz. – kai rotoriaus grandinės aktyvioji varža R maža, b) – kai R2 2 padidinta (feromagnetinis vientisas rotorius)
Slydimas reguliuojamas mažinant įtampą šiais būdais: Naudojant elektroniką, • (kiti žemiau paminėti būdai pamažu tampa senienomis, ypač droselis)
• Jungiant varžas nuosekliai su statoriaus apvija, • Autotransformatoriumi, • Droseliu, įmagnetinant jį nuolatine srove ir t.t.(pamagnetinančiu droseliu) - seniena
Visais atvejais mažinant įtampą, slydimas didėja. Tuo pačiu proporcingai slydimui didėja elektriniai galios nuostoliai rotoriaus grandinėje. Didėjant galios nuostoliams, naudingumo koeficientas mažėja. Todėl šis reguliavimas neekonomiškas. Jis daugiausia taikomas mažos galios asinchroniniams varikliams.
3. AV greičio reguliavimas, keičiant maitinimo įtampos dažnį Pastaruoju metu dažninis AV sukimosi greičio reguliavimas taikomas gana plačiai; tai geležinkelio
ir autotransporto traukos pavaros, metalurgijos ir metalo apdirbimo staklių pavaros. Joms paleisti būtinas didelis pradinis sukimo momentas, o pavarai įsisukus – variklio galios pastovumas. AV dažnio keitiklis turi tenkinti tam tikrus reikalavimus: keičiant dažnį, būtina keisti ir įtampos vertę.
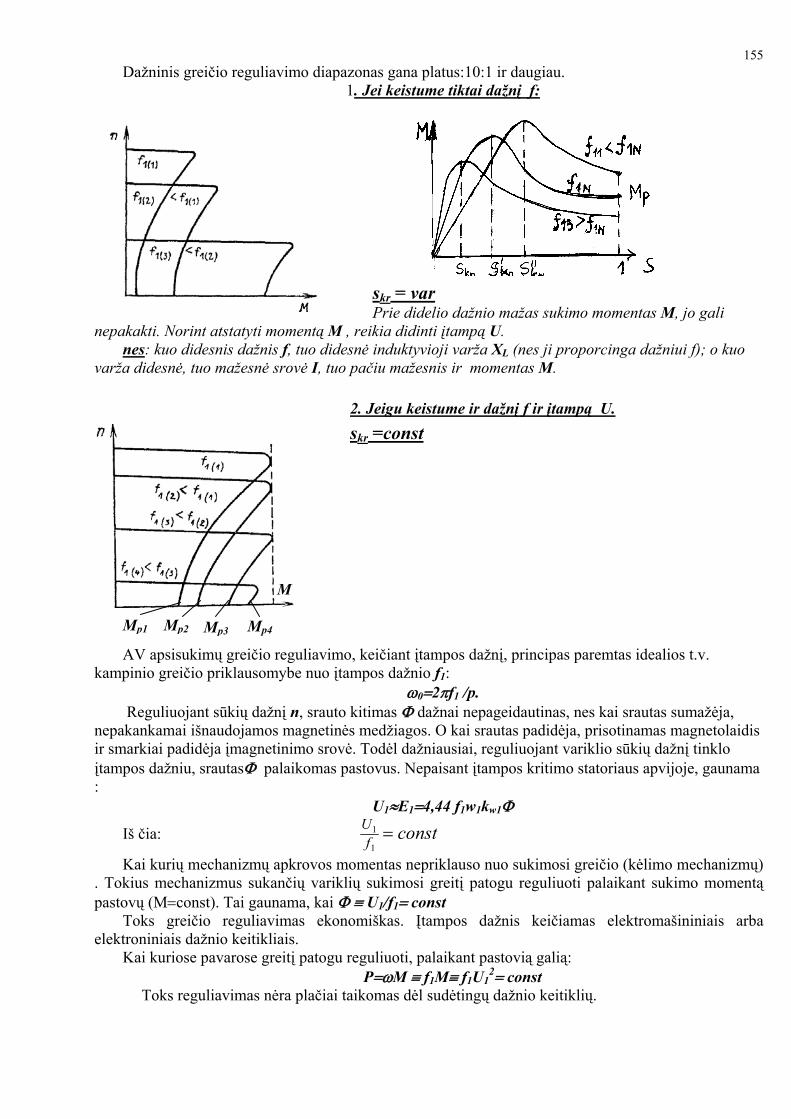
155Dažninis greičio reguliavimo diapazonas gana platus:10:1 ir daugiau.
1. Jei keistume tiktai dažnį f:
skr = var Prie didelio dažnio mažas sukimo momentas M, jo gali
nepakakti. Norint atstatyti momentą M , reikia didinti įtampą U. nes: kuo didesnis dažnis f, tuo didesnė induktyvioji varža XL (nes ji proporcinga dažniui f); o kuo
varža didesnė, tuo mažesnė srovė I, tuo pačiu mažesnis ir momentas M.
2. Jeigu keistume ir dažnį f ir įtampą U. skr =const
M
Mp1 Mp2 Mp3 Mp4
AV apsisukimų greičio reguliavimo, keičiant įtampos dažnį, principas paremtas idealios t.v. kampinio greičio priklausomybe nuo įtampos dažnio f : 1
ω0=2πf /p. 1
Reguliuojant sūkių dažnį n, srauto kitimas Φ dažnai nepageidautinas, nes kai srautas sumažėja, nepakankamai išnaudojamos magnetinės medžiagos. O kai srautas padidėja, prisotinamas magnetolaidis ir smarkiai padidėja įmagnetinimo srovė. Todėl dažniausiai, reguliuojant variklio sūkių dažnį tinklo įtampos dažniu, srautasΦ palaikomas pastovus. Nepaisant įtampos kritimo statoriaus apvijoje, gaunama :
U1≈E1=4,44 f1w k1 w1Φ Uf const1
1=Iš čia:
Kai kurių mechanizmų apkrovos momentas nepriklauso nuo sukimosi greičio (kėlimo mechanizmų) . Tokius mechanizmus sukančių variklių sukimosi greitį patogu reguliuoti palaikant sukimo momentą pastovų (M=const). Tai gaunama, kai Φ ≡ U1/f1= const
Toks greičio reguliavimas ekonomiškas. Įtampos dažnis keičiamas elektromašininiais arba elektroniniais dažnio keitikliais.
Kai kuriose pavarose greitį patogu reguliuoti, palaikant pastovią galią: 2P=ωM ≡ f M≡ f U = const 1 1 1
Toks reguliavimas nėra plačiai taikomas dėl sudėtingų dažnio keitiklių.

156Prisiminus momento formulėje ryšį su dažniu: dažniui didėjant, greitis didėja, paleidimo
momentas mažėja: f
M p1
≡
Dažnį sumažinus, paleidimo momentas padidėja. s RX X
kr ≈+
2
1 2
'
'
Šioje formulėje X2’ priklauso nuo dažnio: f↓; X2
’↓; skr↑. ! Keičiant dažnį, reikia reguliuoti ir įtampą (kadangi kinta momentai). Įtampos ir dažnio santykis
priklauso nuo apkrovos pobūdžio. Jei I/U=const, Ra =const.
4.AV greičio reguliavimas, įjungiant į rotoriaus grandinę papildomą aktyviąją varžą Šiuo būdu reguliuojami AV su faziniu rotoriumi. Aktyvioji varža Rp jungiama į rotoriaus grandinę per žiedų ir šepečių kontaktą ir ji turi dirbti ilgą laiką (paleidimo reostatas šiam tikslui netinka). Sukimo momentas išlieka pastovus. Gaunami nemaži galios nuostoliai reostate, todėl būdas neekonomiškas. Didinant varžą, mechaninė charakteristika minkštėja. Didėjant apkrovos momentui Ms, slydimas mažėja.. Trūkumas – slydimas priklauso nuo apkrovos.
Neapkrauto variklio slydimo reguliuoti praktiškai neįmanoma. 4. Impulsinis sukimosi greičio reguliavimas
AV sukimosi greitį n (slydimą s) galima reguliuoti maitinant variklio statoriaus apviją kintamosios įtampos impulsais. Jai veikiant, rotorius įsisuka, o nutrūkus impulso veikimui – variklis stabdomas. Keičiant impulsų trukmę ir jų dažnį, rotorius sukasi tam tikru vidutiniu greičiu. Variklis visą laiką veikia tai paleidimo, tai stabdymo p.p. režimais. Tai realizuojama valdomais puslaidininkiais (tiristoriais arba tranzistoriais). Šiuo atveju AV režimas yra dinaminis, kadangi jo rotoriui suteikiamo pagreičio ženklas nuolat keičiasi. Kartais šiuo metodu reguliuojamas greitis, maitinant variklį per nuosekliai įjungtus į statoriaus grandinę rezistorius, juos periodiškai šuntuojant. Taip reguliuojami nedidelės galios (30-50 W) varikliai.
Principinėje schemoje Z – nuosekliai su AV statoriaus apvija įjungta kompleksinė varža; S – automatinis jungiklis, šuntuojantis varžas.
Asinchroninių variklių stabdymas
Greitai AV sustabdomas elektriniais ir mechaniniais būdais. Čia aptarsime tik elektrinius būdus. Variklis gali būti stabdomas dviem tikslais:
1. Variklį norima visiškai sustabdyti 2. Norima apriboti variklio rotoriaus sukimosi greitį. Čia gali būti taikomi 3 elektrinio stabdymo
būdai. Aptarsime visus atvejus atskirai. Stabdymas vyksta tada, kai sukimosi greičio n ir momento M ženklai priešingi!
Stabdymas atjungiant variklį nuo įtampos •
Atjungus variklį nuo įtampos, leidžiama jam pačiam sustoti. Jei prieš išjungiant variklį rotoriaus kampinis greitis ω, tai besisukančių dalių kinetinė energija

157W=Jω2/2.
J – besisukančių dalių inercijos momentas. Iki sustojant varikliui, visa kinetinė energija suvartojama trinčiai nugalėti. Atjungus variklį nuo įtampos, laikas iki sustojimo tiesiog proporcingas besisukančių dalių kinetinei energijai ir atvirkščiai proporcingas trinties nuostoliams.
Stabdymas priešiniu jungimu•
Varikliui dirbant, sukeičiamos dvi statoriaus apvijos fazės. Tuomet statoriaus magnetinis laukas sukasi prieš rotoriaus sukimosi kryptį. AM dirba stabdymo režimu. Slydimas s >1. Taške C rotoriaus permagnetinimo dažnis
f2 ≈2f1, todėl rotoriaus apvijos srovė smarkiai padidėja. Taip pat išauga ir rotoriaus plieno
nuostoliai (taške A plieno nuostoliai paneigtinai maži). Elektromagnetiniu požiūriu AM perkrauta. Jei rotorius fazinis, stabdymo srovėms apriboti į rotoriaus grandinę įjungiamas papildoma aktyvioji varža. Stabdymo operacijos automatizuojamos. Jei perjunginėjama rankiniu būdu, reikia stebėti, kad varikliui sustojus arba beveik sustojus, jis būtų atjungtas nuo įtampos. Nes kitaip jis pradės suktis į priešingą pusę.
Kas vyks po stabdymo – dar neaišku, priklausys nuo išorinių sąlygų.
variklis
stabdis
stabdis variklis
Stos tik iš inercijos
Generatorinis (rekuperacinis) stabdymas• Variklis pervedamas į generatoriaus režimą. Atsiranda mašiną stabdantis sukimo momentas:
n>n0; (s<0; M<0). Tai gali įvykti, elektros mašinai riedant stačia nuokalne, ar kai nuleidžiamas sunkus krovinys. Mechaninė energija virsta elektrine ir atiduodama į tinklą. Variklis virsta generatoriumi ir išvysto stabdymo momentą. Stabdymo momentui padidinti
praktikuojamas statoriaus apvijos perjungimas iš žvaigždės į trikampį.
n>0; M<0. Kai šie ženklai priešingi, vyksta stabdymas
Taip stabdymo momentas padidėja 3 kartus, tik reikia atsižvelgti į tai, kad fazės apvijai nebūtų per aukšta linijinė įtampa. Norint asinchroninę mašiną pervesti į generatoriaus režimą, esant palyginti nedideliems rotoriaus sukimosi greičiams, reikia mažinti statoriaus magnetinio lauko sukimosi greitį n1, perjungiant statoriaus apvijos polių skaičių.
Šitoks stabdymo būdas plačiai taikomas geležinkelio transporte: judant sąstatui nuo kalno, traukos asinchroninės mašinos rotoriaus sukimosi greitis viršija magnetinio srauto sukimosi greitį – AM virsta G, kurio rotorius yra stabdomas, o generatoriaus elektrinė galia per statoriaus grandinę atiduodama į tinklą.
Matome, kad rekuperaciniu stabdymu AM neperkraunama elektromagnetiškai, o dalį energijos grąžina į tinklą. Tačiau rotorius stabdomas tik iki AM sinchroninio sukimosi greičio. Norint sinchroninį greitį mažinti, tenka: mažinti įtampos dažnį f1, didinti polių porų skaičių (jau tai aptarėme).

158Dinaminis stabdymas•
Jeigu besisukant AM rotoriui, atjungsime statoriaus apviją nuo tinklo ir prijungsime prie nuolatinės
įtampos šaltinio, tai rotoriaus apvija iš inercijos judės statoriaus apvijos sukurtame nejudamame nuolatiniame magnetiniame lauke, o rotorių veiks stabdymo momentas. (Trumpai sujungta rotoriaus apvija juda nejudančiame magnetiniame lauke, taigi, susikurs stabdantis sukimo momentas).
Čia rotoriaus stabdymo procesas lėtesnis negu
priešinio jungimo atveju. Stabdymo momento vertė priklauso nuo nuolatinės įtampos vertės ir rotoriaus apvijos elektromagnetinių parametrų; jeigu rotorius fazinis, stabdymo efektyvumo padidinimui padidinti į rotoriaus grandinę gali būti jungiamos papildomos aktyviosios varžos.
Stabdymo metu veikia kaip sinchroninis
generatorius, kurio energija suvartojama rotoriuje. Susikuria generatorinis stabdymo momentas. Toks stabdymas vadinamas dinaminiu stabdymu.
M(s) neturi prasmės Ch-ka
nusileido
AM paverčiama SG, kurio energija suvartojama rotoriuje
stabdymui
Visos dinaminio stabdymo operacijos automatizuojamos.
Vienfaziai asinchroniniai varikliai
Tai AV, kurių statoriaus apvija jungiama prie vienfazio tinklo, o rotorius – trumpai sujungtas. “Vienfazis – tai reiškia maitinamas iš vienfazio tinklo, o apvija statoriuje gali būti 1, 2 ar net 3. Jų galia siekia iki kelių šimtų vatų, rodikliai blogesni nei trifazių, tų pačių matmenų ir masės vienfazis AV turi 50-60%trifazio AV galios.
Dažnai elektros energija tiekiama vienfaziu tinklu: gyvenamieji namai, geležinkelio transportas, geologiniai gręžiniai. Tai grindžiama ekonominiais sumetimais. Vienfazę elektros energiją galima tiekti 2 laidais; jeigu vienfazė elektros linija pakankamai ilga, vietoje vieno laido naudojama žemė; taigi šiuo atveju vienfazė energija transportuojama vienu oro linijos arba kabelio laidu ir žeme. Tuo būdu vienfazio elektros tinklo privalumas – savikaina ir eksploatavimas yra pigesni. Tačiau kyla klausimas, kaip panaudoti vienfazę įtampą AV maitinimui? Yra 2 būdai:
• Kuriami specialūs vienfaziai varikliai, kurių statoriuje suklota viena fazė, maitinama iš vienfazio tinklo;
• Naudojami jau ištirti trifaziai, kurių fazės jungiamos įvairiomis schemomis (universalieji AV). Jų galia gali siekti 1000 kW.
Vienfazį variklį galima nagrinėti kaip trifazį, kurio viena fazė atjungta (simetrinių dedamųjų metodu; nesimetrinis atvejis).
Vienfazio AV elektromagnetinis momentas
Jau anksčiau įrodėme, kad vienfazė apvija asinchroninės mašinos oro tarpe kuria pulsuojamąjį magnetinį lauką, kurį galima išskaidyti į du priešingomis kryptimis slenkančius laukus, kurie veikia tą patį rotorių, kuria elektromagnetinį momentą, kaip ir trifazis variklis.Šių laukų amplitudės lygios pulsuojamojo lauko amplitudės maksimumo pusei. Vienas jų vadinamas tiesioginiu (ar
tiesioginės sekos) (kurio sukimosi kryptis sutampa su laisvai pasirinkta rotoriaus sukimosi kryptimi) +M, o kitas vadinamas atvirkštiniu: -M. Kadangi abu el-m momentai veikia tą patį rotorių, tai suminis M lygus momentų algebrinei sumai.

159Vienfazio AV rotoriui stovint (s=1) suminis momentas
M=0. T.y. vienfazis AV neturi paleidimo momento, negali pats pradėti suktis. Tik rotorių pasukus viena ar
kita kryptimi ((s≠1), jis ima suktis bet kuria kryptimi. Mechaninių momentų simetrija suyra. Ta kryptimi variklio sukimo momentas padidėja ir jei jis didesnis už pasipriešinimo momentą, rotoriaus sūkių dažnis didėja. Darbo taškas patenka į charakteristikos stabilaus darbo sritį; variklis normaliai dirba. Variklis vienodai
paleidžiamas tiesioginio ar atvirkštinio lauko kryptimi.
stabdis variklis
variklis stabdis
Tiesioginės sekos magnetinio lauko atžvilgiu rotoriaus slydimas ( )sn n
n11 2
1=
−;
atvirkštinės sekos magnetinio lauko atžvilgiu rotoriaus slydimas: ( )
;1
212 n
nns
+=
Sulyginus abu greičius, gausime: n1 - s1n1 = s2n1 - n1; Iš čia: s2 = 2 – s1. Suprantama, kad toks variklio paleidimo būdas nėra patogus. Geriau, kai jis turi paleidimo momentą.
Vienfazių asinchroninių variklių paleidimas
Jau žinome, kad vienfazis AV neturi pradinio paleidimo momento. Jam sukurti variklio statoriuje gali
būti suklota paleidimo fazė, kuri užima 1/3 statoriaus griovelių, o darbinė fazė – 2/3 griovelių. Darbinės ir paleidimo fazės suklotos taip, kad jų magnetovaros sudaro 90 el. laipsnių. Į paleidimo fazės grandinę įjungiamas laiko fazę pasukantis elementas – kompleksinė elektrinė varža. Dažniausiai tai aktyvioji arba talpinė varža, rečiau induktyvioji.
Rotoriui įsisukus, paleidimo fazė jungikliu atjungiama. Dažnai naudojami vienfaziai AV, kurių paleidimo fazėje įjungta aktyvioji varža. Ji gaminama iš
mažesnio negu darbinė apvija skerspjūvio laido. Dalis paleidimo fazės gali būti daroma bifiliarinė, kad sumažėtų jos induktyvumas. Taigi paleidimo fazės aktyvioji varža didesnė, o induktyvioji mažesnė negu darbinės fazės. Vadinasi, paleidimo fazės srovė I pralenks laiko kampu ψ darbinės fazės srovę Ip d.
Rečiau jungiama induktyvioji varža. Tada srovė I atsilieka laiko kampu ψ nuo darbinės fazės I . p dJeigu reikia gauti didesnį paleidimo momentą, tai paleidimo fazėn jungiama talpinė varža. Šiuo
atveju srovė Ip pralenks laiko kampu ψ nuo darbinės fazės srovę Id laiko kampu ψ≈900.
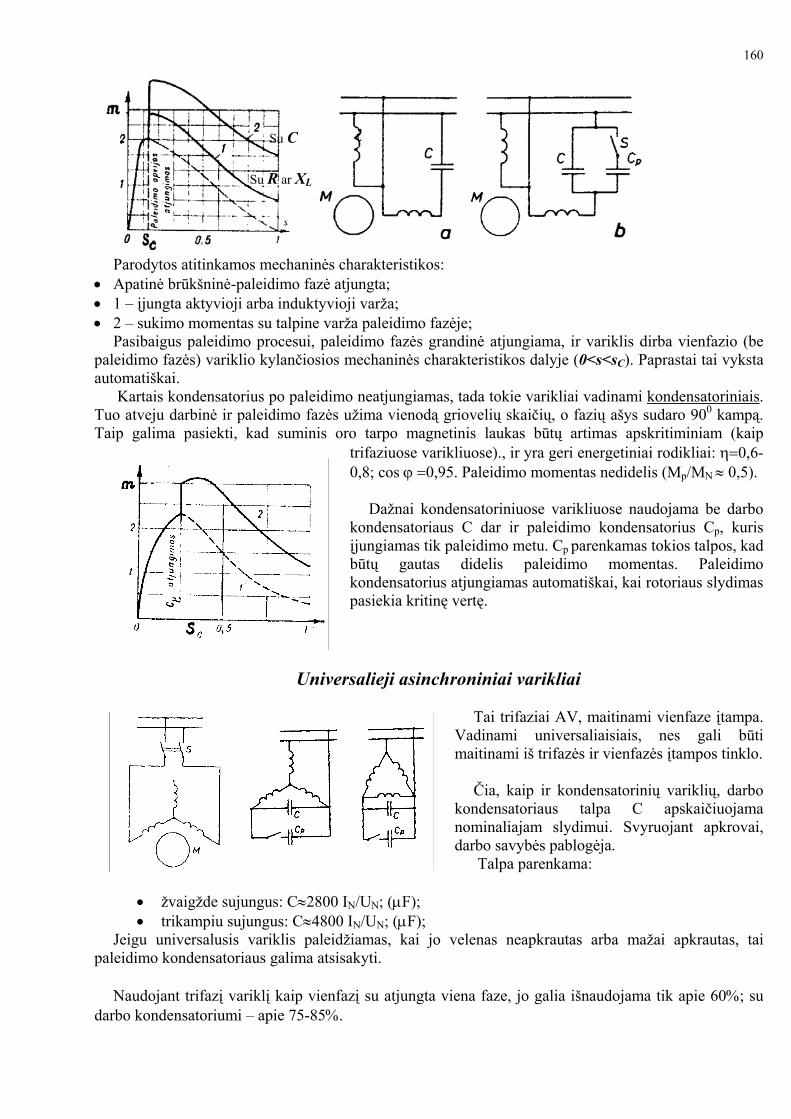
160
Su C
Su R ar XL
Parodytos atitinkamos mechaninės charakteristikos: • Apatinė brūkšninė-paleidimo fazė atjungta; • 1 – įjungta aktyvioji arba induktyvioji varža; • 2 – sukimo momentas su talpine varža paleidimo fazėje;
Pasibaigus paleidimo procesui, paleidimo fazės grandinė atjungiama, ir variklis dirba vienfazio (be paleidimo fazės) variklio kylančiosios mechaninės charakteristikos dalyje (0<s<sC). Paprastai tai vyksta automatiškai.
Kartais kondensatorius po paleidimo neatjungiamas, tada tokie varikliai vadinami kondensatoriniais. Tuo atveju darbinė ir paleidimo fazės užima vienodą griovelių skaičių, o fazių ašys sudaro 900 kampą. Taip galima pasiekti, kad suminis oro tarpo magnetinis laukas būtų artimas apskritiminiam (kaip
trifaziuose varikliuose)., ir yra geri energetiniai rodikliai: η=0,6-0,8; cos ϕ =0,95. Paleidimo momentas nedidelis (M /Mp N ≈ 0,5).
Dažnai kondensatoriniuose varikliuose naudojama be darbo
kondensatoriaus C dar ir paleidimo kondensatorius Cp, kuris įjungiamas tik paleidimo metu. Cp parenkamas tokios talpos, kad būtų gautas didelis paleidimo momentas. Paleidimo kondensatorius atjungiamas automatiškai, kai rotoriaus slydimas pasiekia kritinę vertę.
Universalieji asinchroniniai varikliai
Tai trifaziai AV, maitinami vienfaze įtampa. Vadinami universaliaisiais, nes gali būti maitinami iš trifazės ir vienfazės įtampos tinklo.
Čia, kaip ir kondensatorinių variklių, darbo
kondensatoriaus talpa C apskaičiuojama nominaliajam slydimui. Svyruojant apkrovai, darbo savybės pablogėja.
Talpa parenkama:
• žvaigžde sujungus: C≈2800 IN/UN; (μF); • trikampiu sujungus: C≈4800 IN/UN; (μF);
Jeigu universalusis variklis paleidžiamas, kai jo velenas neapkrautas arba mažai apkrautas, tai paleidimo kondensatoriaus galima atsisakyti.
Naudojant trifazį variklį kaip vienfazį su atjungta viena faze, jo galia išnaudojama tik apie 60%; su
darbo kondensatoriumi – apie 75-85%.

161AV su viena faze statoriuje
Vienfazis AV su ekranine apvija poliuose
Mažos galios (iki 100W) vienfazių AV paleidimo momentui sukurti naudojamas ryškiapolis statorius
su vienfaze koncentruota apvija. Ant išreikštų statoriaus skeltinių polių dalių uždėtos trumpai sujungtos apvijos (ekraninės)1.
I FPrijungus statoriaus fazę prie vienfazio įtampos šaltinio, faze tekės srovė , kurios MV 1 1 ’neekranuotoje poliaus dalyje kurs magnetinį srautą Φ1 ir ekranuotoje poliaus dalyje – srautą Φ . 1
Ekraninę apviją 1 galima įsivaizduoti kaip T antrinę trumpai sujungtą apviją (T pirminė apvija –5). Ekraninėje apvijoje srautas ’Φ indukuoja EV 1E2, kuri atsilieka nuo ją sukūrusio magnetinio srauto 900. Ekranine apvija teka srovė, kurios MV F2
’ kuria magnetinį srautą Φ2’. Srautų Φ2
’ ir Φ1
’ suma lygi ekranuotos poliaus dalies srautui Φ2.
Kampas Θ - tai laiko kampas (fazė) tarp magnetinių srautų Φ1 irΦ2.
Kadangi magnetiniai srautai Φ1 irΦ2
sudaro erdvinį kampą α ir laiko kampą Θ (fazė tarp magnetinių srautų), tai jų sąveika su rotoriaus srovėmis lemia pradinį paleidimo
momentą: Mp=CΦ1Φ2sinα sinΘ .
Šių variklių techniniai ir energetiniai rodikliai blogesni negu kondensatorinių, tačiau jie plačiai naudojami, kur pavaros pradinis pasipriešinimo momentas tenkina sąlygą M / Mk N≤0,4. Variklio rotorius nereversuojamas.
Vienfazis AV su laiptuotuoju oro tarpu
Variklio statoriaus paketo, surinkto iš elektrotechninio plieno
lakštų, poliaus antgalis 1 laiptuotas. Ant polių suvyniota vienfazė apvija 2. Rotoriaus 3 apvija trumpai sujungta. Įjungus statoriaus apviją į vienfazį tinklą, statoriaus ir rotoriaus apvijų srovės kuria magnetinius srautus ir Φ Φ1 2 , kurie erdvėje sudaro kampą α. Šių srautų laiko fazės skiriasi nedideliu kampu. Čia, kaip ir variklyje su ekranine apvija, rotorių veiks pradinis paleidimo momentas
M CΦp 1Φ2sinα sinΘ, Kuris rotorių suks prieš laikrodžio rodyklę. Jeigu rotoriaus apvija srovė neteka, tai Θ=0. Šių variklių paleidimo momentas mažas (M ≈0,1 Mp N), todėl jie taikomi ribotai.
Egzistuoja ir kiti pavyzdžiai, pvz., vienfazis AV su asimetriniu statoriaus magnetolaidžiu ir kt.

162
Specialiosios asinchroninės mašinos AM su giliais grioveliais
Visada siekiama, kad variklis, apkrautas vardine apkrova, turėtų didelį naudingumo koeficientą. Tuo
tikslu mažinami elektriniai galios nuostoliai rotoriaus apvijoje; šie nuostoliai proporcingi slydimui. Taigi slydimas turi būti kuo mažesnis. O jis tuo mažesnis, kuo variklio mechaninės charakteristikos darbinė dalis statesnė (“kietesnė charakteristika”. Tokias mechanines ch-kas turi AV, kurių rotoriaus aktyvioji varža R2 maža. Bet tokių variklių mažas paleidimo momentas. Savo ruožtu, paleidimo momentas didinamas didinant paleidimo metu rotoriaus aktyviąją varžą R2. Rotoriui įsisukus, ji sumažėja.Taip buvo sukurti pagerintų paleidimo savybių AV su giliais grioveliais: didelis paleidimo momentas esant mažai paleidimo srovei.
Tokio variklio rotoriaus griovelio gylis 6-12 kartų
didesnis už plotį. Jų forma gali būti stačiakampė, trapecinė, ovalinė ir kt.
Srovės išstūmimo efektas atsiranda dėl rotoriaus aktyviojo laidininko sklaidos srauto Φd indukuotų EV-varų
Ed2 .Rotoriaus masyvų aktyvųjį laidininką (iš siaurų varinių juostelių) galima įsivaizduoti sudarytą iš daugelio plonų vienodo skerspjūvio lygiagrečiai griovelyje suklotų laidininkų. Apatinio sluoksnio laidininkus gaubia didesnis sklaidos srautas Φ ir juose indukuojama didesnė EV Ed d2. Jos didumas priklauso nuo rotoriaus srovės dažnio f2 ir slydimo s
Ed2 = jX2sI2 = jω L2I2 =j2π sf1L I2 2 ; Ed2 ir induktyvioji sklaidos
varža X2s paleidimo metu (s=1) didelės ir mažėjant slydimui s, mažėja. Srovės tankio pasiskirstymas giliame griovelyje žr.pav. b).
Iš šios kreivės matome, kad beveik visa rotoriaus srovė teka viršutine stiebo dalimi, kurios skerspjūvis daug mažesnis už viso stiebo. Dėl to tarytum padidėja apvijos aktyvioji varža, kuri apriboja rotoriaus srovę, o tuo
pačiu padidina variklio paleidimo momentą. Rotoriaus narvelio aktyviojo laidininko srovės tankis sluoksniuose pasiskirsto atvirkščiai proporcingai varžoms. Srovės tankis viršutiniame sluoksnyje B gerokai didesnis nei apatiniame A
Φd
Srovės išstūmimo efektas trumpai sujungto rotoriaus su giliais grioveliais aktyviajame laidininke, esančiame feromagnetike
Ekvivalentinis laidininkas paleidime
j A mmIS= [ / ]2 Veikia
R
Veikia X↑ I↓
Kai rotorius įsisuka ir slydimas arti 0, rotoriaus srovės dažnis 2-3 Hz. Esant tokiam dažniui, induktyvioji rotoriaus laidininko varža daug mažesnė už aktyviąją varžą ir srovės pasiskirstymui beveik neturi įtakos. Srovė pasiskirsto tolygiai visame laidininko skerspjūvyje. (2 kreivė -b) pav.).
O kadangi variklio paleidimo metu srovė išstumiama į viršutinį sluoksnį, tai galima aktyvų laidininką
pakeisti ekvivalentišku mažesnio skerspjūvio laidininku viršutiniame sluoksnyje.
↓↑=
SR 1
Jo aktyvioji varža ir kartu rotoriaus apvijos aktyvioji varža paleidimo metu didesnė. Kai rotorius įsisuka ir srovė pasiskirsto tolygiai visame skerspjūvyje, rotoriaus apvijos aktyvioji varža
sumažėja. Darbo srityje gaunama kieta mechaninė ch-ka. Tokiu būdu variklio su giliais grioveliais paleidimo momentas didesnis, o paleidimo srovė mažesnė
nei normalaus variklio.
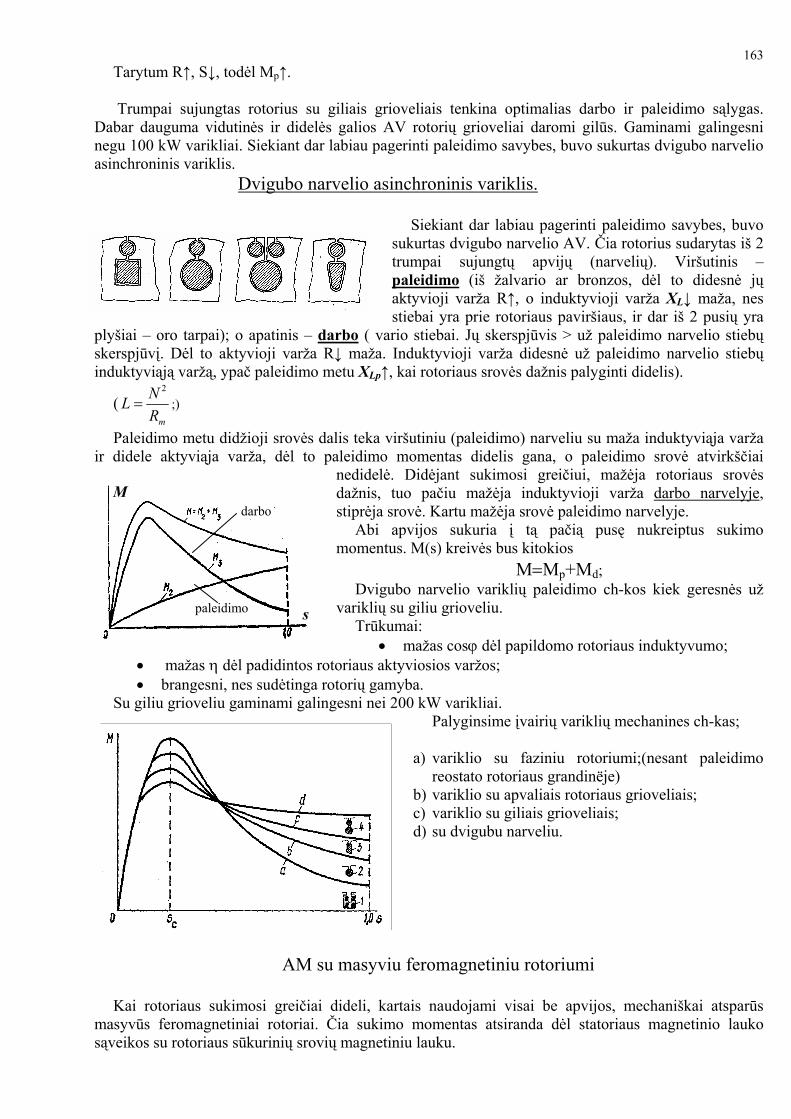
163Tarytum R↑, S↓, todėl M ↑. p Trumpai sujungtas rotorius su giliais grioveliais tenkina optimalias darbo ir paleidimo sąlygas.
Dabar dauguma vidutinės ir didelės galios AV rotorių grioveliai daromi gilūs. Gaminami galingesni negu 100 kW varikliai. Siekiant dar labiau pagerinti paleidimo savybes, buvo sukurtas dvigubo narvelio asinchroninis variklis.
Dvigubo narvelio asinchroninis variklis.
Siekiant dar labiau pagerinti paleidimo savybes, buvo sukurtas dvigubo narvelio AV. Čia rotorius sudarytas iš 2 trumpai sujungtų apvijų (narvelių). Viršutinis – paleidimo (iš žalvario ar bronzos, dėl to didesnė jų aktyvioji varža R↑, o induktyvioji varža XL↓ maža, nes stiebai yra prie rotoriaus paviršiaus, ir dar iš 2 pusių yra
plyšiai – oro tarpai); o apatinis – darbo ( vario stiebai. Jų skerspjūvis > už paleidimo narvelio stiebų skerspjūvį. Dėl to aktyvioji varža R↓ maža. Induktyvioji varža didesnė už paleidimo narvelio stiebų induktyviąją varžą, ypač paleidimo metu X ↑, kai rotoriaus srovės dažnis palyginti didelis). Lp
mRNL
2
=( ;)
Paleidimo metu didžioji srovės dalis teka viršutiniu (paleidimo) narveliu su maža induktyviąja varža ir didele aktyviąja varža, dėl to paleidimo momentas didelis gana, o paleidimo srovė atvirkščiai
nedidelė. Didėjant sukimosi greičiui, mažėja rotoriaus srovės dažnis, tuo pačiu mažėja induktyvioji varža darbo narvelyje, stiprėja srovė. Kartu mažėja srovė paleidimo narvelyje.
M
s paleidimo
darbo Abi apvijos sukuria į tą pačią pusę nukreiptus sukimo
momentus. M(s) kreivės bus kitokios M=M +Mp d;
Dvigubo narvelio variklių paleidimo ch-kos kiek geresnės už variklių su giliu grioveliu.
Trūkumai: • mažas cosϕ dėl papildomo rotoriaus induktyvumo;
• mažas η dėl padidintos rotoriaus aktyviosios varžos; • brangesni, nes sudėtinga rotorių gamyba.
Su giliu grioveliu gaminami galingesni nei 200 kW varikliai. Palyginsime įvairių variklių mechanines ch-kas;
a) variklio su faziniu rotoriumi;(nesant paleidimo reostato rotoriaus grandinëje)
b) variklio su apvaliais rotoriaus grioveliais; c) variklio su giliais grioveliais; d) su dvigubu narveliu.
AM su masyviu feromagnetiniu rotoriumi
Kai rotoriaus sukimosi greičiai dideli, kartais naudojami visai be apvijos, mechaniškai atsparūs
masyvūs feromagnetiniai rotoriai. Čia sukimo momentas atsiranda dėl statoriaus magnetinio lauko sąveikos su rotoriaus sūkurinių srovių magnetiniu lauku.

164Čia kaip ir narveliniuose rotoriuose su giliais grioveliais atsiranda srovės išstūmimo efektas. Srovė
teka rotoriaus paviršiumi. Gylis, kuriuo teka, priklauso nuo slydimo. Šio tipo rotorių aktyvioji varža didesnė už induktyviąją ir todėl max sukimo momentas gaunasi esant slydimui s >1. C
Stengiantis sumažinti rotoriaus aktyviąją varžą, jo paviršius padengiamas variu. Keičiant dangos storį, varžą galima keisti plačiose ribose.
Valdomieji asinchroniniai varikliai (dvifaziai) (0,1-300W)
Naudojami automatinio valdymo sistemose, kur variklis dažnai paleidžiamas ir stabdomas, kur turi
būti maža rotoriaus inercija, pvz., užrašančiuose registravimo prietaisuose, ten, kur reikalingas plačiose ribose valdomas greitis.
Tuo tikslu rotoriai gaminami tuščiaviduriai. Mažesniems sukimosi greičiams vartojama pramoninio dažnio 50 Hz įtampa, o didesniems - 200, 400, 500, ir 1000 Hz dažnių įtampos.
Jiems keliami reikalavimai:
1. Variklis turi veikti tik tada, kai prijungiama įtampa, nutraukus įtampą, variklis turi tuoj pat sustoti 2. Variklio darbo stabilumas prie įvairių sukimosi greičių; 3. Greičio reguliavimas plačiame diapazone; (keičiant amplitudę ar fazę), 4. Beveik tiesinė mechaninė ir reguliavimo ch-kos (tam tikslui rotoriaus aktyvioji varža turi būti didelė, ir,
atjungus valdymo įtampą, bus efektyviai stabdoma) 5. Didelis paleidimo momentas (tam tikslui paleidžiant reikalingas sukamasis apskritiminis magnetinis laukas).
Maksimalus sukimo momentas gaunamas, esant kritiniam slydimui = 3÷4); 6. Maža valdymo galia, didelis greitis ir patikimumas, maži matmenys ir masė.
Valdant (keičiant) variklio srovę, galima keisti (valdyti) variklio sukimosi greitį. Ta valdymo srovė keičiama taip, kad sukuriamas magnetinis laukas, kuris keičiasi nuo pulsuojamojo iki sukamojo apskritiminio (tarpe jų - elipsinis laukas).
Esminis skirtumas nuo paprasto vienfazio, kuriame
sukuriamas pulsuojamasis magnetinis laukas yra tas, kad čia mechaninė ch-ka turi būti priešingai orientuota, t.y. kad, įsukus tokio variklio rotorių, jis toliau savaime nesisuktų (reikalaujama, kad sukimosi greitis priklausytų nuo valdymo signalo, valdymo srovės.
sukamasis pulsuojamasis
Mp=0 Skritinis
Mp
Tuo tikslu daroma rotoriaus didesnė aktyvioji varža, ir
tiek didesnė, kad kritinis slydimas būtų didesnis už 1 (artimas 2, net 3, 4).
Įprastiniame vienfaziame variklyje gauname tokias ch-
kas:
Valdomame gauname tokias ch-kas Abiem atvejais pavaizduotos mechaninės ch-kos , kai yra pulsuojamasis ir sukamasis apskritiminis
laukas (ribiniai atvejai). O kai laukas elipsinis, būtų visa eilė tarpinių ch-kų.

165 Kad pasižymėtų geromis dinaminėmis savybėmis (kad greit sureaguotų), gaminami su tuščiaviduriu
rotoriumi be magnetolaidžio. Jie taip sukonstruoti, kad sukamasis apskritiminis magnetinis laukas gaunamas tada, kai norime gauti
didžiausią sukimosi greitį, o mažesniam greičiui sukuriamas elipsinis laukas, o pulsuojamasis laukas sukuriamas nuliniam greičiui, tada kaip tik gaunamas stabdymo efektas.
Statoriuje yra dvifazė apvija: žadinimo fazė, pastoviai prijungta prie vienfazio tinklo, ir valdymo apvija, tarp kurios gnybtų siunčiamas valdymo signalas.
Statoriaus fazių ašys sudaro 900 kampą. Į žadinimo fazės grandinę nuosekliai įjungiamas kondensatorius, kuris lemia fazių skirtumą tarp srovių I ir Iž v. Dėl to variklyje sukuriamas sukamasis magnetinis laukas.
Jeigu valdymo apvijoje signalo nėra, tai variklio oro tarpe veikia pulsuojamasis magnetinis laukas, kuris paleidimo momento nesukuria. Jeigu dirbant valdomajam asinchroniniam varikliui signalas Us nutrūksta, tai rotorius galėtų suktis ir toliau kaip paprastas vienfazis variklis. Bet toks reiškinys valdomajam varikliui neleistinas: rotorius privalo sustoti, kai tik signalas pranyksta (kitaip jis tampa nebevaldomas).
Šitokį efektą galima pasiekti padidinus rotoriaus apvijos aktyviąją varžą. Pasiaiškinsime apie tai plačiau: dirbant VV su valdymo signalu Us, mechaninės ch-kos darbo taškas
A (kreivėje M1). Signalui dingus, variklis dirbs kaip vienfazis, o jo darbo taškas B atsidurs ant kreivės M. Čia variklis išvysto sukimo momentą ir rotorius nenustoja suktis.
Didinant rotoriaus aktyviąją varžą, mechaninių charakteristikų kritiniai slydimai persislenka į
didesnių slydimų pusę. II-me pav. kritinis slydimas sC>1 (gali pasiekti 3; 4), o suminė elektromechaninė ch-ka atvaizduota
kreive M. Dabar, nutrūkus signalui Us, momentas pasidaro neigiamas (taške B), ir variklio rotorius stabdomas.
Išvada: padidinus rotoriaus apvijos aktyviąją varžą, esant pulsuojamajam laukui ir įsukus rotorių pašaliniu momentu bet kuria kryptimi, rotorius automatiškai sugrįš į ramybės būseną (s=1).
Jei bus nepakankamo didumo rotoriaus aktyvioji varža, rotorius ir toliau suksis (jei pasipriešinimo momentas mažesnis už variklio elektromagnetinį momentą). Tokia vienfazės AM savybė vadinama rotoriaus savieiga. Čia ji turi būti pašalinta.
Siekiant pašalinti inertiškumą, padidinti greitaeigiškumą, tenka mažinti rotoriaus inercijos momentą.
J. Tuo tikslu rotorius dažnai daromas palengvintas, tuščiaviduris, be šerdies ir apvijos (plonasienis Al cilindras – stiklinėlė; iš aliuminio lydinių arba plieno).

166Rotorius (pagal konstrukciją) gali būti:
1. narvelinis; 2. tuščiaviduris nemagnetinis aliuminio. Iš Al ar jo lydinių pagamintas rotorius vadinamas
tuščiaviduriu nemagnetiniu (R2 didelė, X2 maža dėl didelio nemagnetinio tarpo) Dėl to mechaninė ch-ka gera.
3. tuščiaviduriu feromagnetiniu plieno rotoriumi. (Iš plieno pagamintas rotorius vadinamas tuščiaviduriu feromagnetiniu rotoriumi (neturi vidinio statoriaus, tada magnetolaidžiu tarnauja pats rotorius).
Abiejuose elektromagnetiniai procesai panašūs. Rotorius turi padidintą aktyvinę varžą (vadinasi, pašalinama savieiga) ir mažą inercijos momentą.
Toks AV turi du statorius: išorinį, su apvija 1 ir vidinį (be apvijos), įeinantį į tuščiavidurį rotorių 3. Vidinis statorius reikalingas, kad sumažėtų magnetinė varža pagrindiniam srautui.Toliau -
tuščiavidurį plonasienį (bus palyginti didelė aktyvioji varža) rotorių 2, išorinio statoriaus apviją 4, veleną 5 ir įvorę 6 rotoriaus cilindrui pritvirtinti.
Čia tikslas – gauti mechaninių ch-kų šeimą. Jas formuojame, keisdami magnetinį lauką nuo pulsuojamojo iki apskritiminio sukamojo lauko. Tai įmanoma realizuoti 2-fazei asimetrinei apvijai (tai lygu 4- fazei simetrinei);
Keisti (valdyti magnetinį lauką galima, keičiant vienos iš tų dvifazių apvijų srovę (o ji priklauso nuo įtampos).
Generatoriaus režimas,
Tai vadinama : 1) amplitudiniu valdymu; 2) fazinis valdymas (tada reikės dar fazės valdymo įrenginio). 3) dar gali būti amplitudinis - fazinis valdymas.
Amplitudinio valdymo atveju: U1=const ; (I1=const). Keičiant I2 amplitudę (U2 amplitudę)
gauname laukus nuo pulsuojamojo iki sukamojo apskritiminio . Čia valdymo tikslas toks: • Norint, kad greičiau suktųsi, reikės didesnės valdymo
įtampos; • Norint, kad suktųsi priešinga kryptimi, reikia pakeisti U2
kryptį (sukeitėme galus lab. d. ); • Norint, kad sustotų, reikia sumažinti įtampą U2 iki 0.
I1
I2
Jei bandysime sukti šioje ch-kos dalyje (pašaliniu momentu) atsiras stabdymas. Esant bet kuriam greičiui, veiks stabdymo momentas.
Išvystomas momentas priešingo ženklo negu sukimosi greitis – t.y. stabdymas

167Fazinio valdymo atveju bus kiek sudėtingiau, bet esmė ta pati: laukas keičiasi nuo pulsuojamojo
iki apskritiminio. Kai srovės statmenos, - laukas apskritiminis, o kai fazės sutampa, - pulsuojamasis; kai kampas tarp 0
ir 900 – elipsinis.
I2 I1
I2
I2
Bet visa bėda – mažas naudingumo koeficientas.
Valdymo esmė – mažesnis greitis gaunamas, didinant slydimą s, o tai reiškia atitinkamai mažesnį η (nes čia daugiau oro tarpų), ypač mažų greičių srityje; taip pat didesni gabaritai. Taigi, greitį valdome nuostolių sąskaita (didelio s sąskaita), todėl naudojama tik mažos galios varikliams, kokių nors pagalbinių mechanizmų valdymui (pvz., atidaryti – uždaryti kokią nors sklendę lėčiau ar greičiau).
Šiuose varikliuose sukimo momentas atsiranda sąveikaujant
statoriaus apvijos sukurtam magnetiniam laukui su rotoriaus sūkurinių srovių sukurtu magnetiniu lauku.
Skirtumas tarp el-m reiškinių, vykstančių nemagnetiniame ir feromagnetiniame tuščiaviduriuose rotoriuose:
feromagnetiniame rotoriuje• srovė išstumiama į ploną rotoriaus paviršiaus sluoksnį, kurio storis priklauso nuo slydimo. Kuo didesnis slydimas, tuo daugiau srovė išstumiama į rotoriaus paviršių.
Tuščiavidurio feromagnetinio rotoriaus varžos priklauso nuo rotoriaus srovės dažnio, taigi ir nuo slydimo. Techninėms savybėms pagerinti kartais rotoriaus paviršius padengiamas variu. Tada rotoriaus varžą galima keisti didelėse ribose. Varikliai su feromagnetiniais rotoriais turi gerokai didesnį inercijos momentą, jį veikia nemažos
radialinės jėgos. Dėl to nėra plačiai taikomi ir negali konkuruoti su nemagnetiniais tuščiaviduriais rotoriais;
nemagnetiniuose rotoriuose toks efektas nepastebimas. • Bet jiems būdingas didelis nemagnetinis tarpas tarp išorinio ir vidinio statorių magnetolaidžių.
= (0,8 – 0,9) ITuo paaiškinama didelė variklio t.v. srovė : I0 N ir mažas galios koeficientas. Dėl didelių tuščiosios veikos srovės ir slydimo gaunami dideli galios nuostoliai. Naudingumo koeficientas mažas.
Nemagnetinis rotorius taikomas plačiau už feromagnetinį dėl mažo inercijos momento.
Iš specialiųjų elektros mašinų dar gali būti paminėti: • švytuojamosios elektros mašinos; • tiesiaeigiai AV; • selsinai; • pasukamieji transformatoriai Apie tai bus nagrinėjama atskirame “Specialiųjų mašinų” kurse, I-ojo kurso magistrantams

168SINCHRONINĖS MAŠINOS
SM – tai kintamosios srovės bekolektorė mašina. Jos darbo esmė skiriasi nuo AM tuo, kad jos
rotoriaus sukimosi greitis n proporcingas tinklo dažniui f:
n fp
= ; n fp
=60 ; čia p- mašinos polių porų skaičius
SV, skirtingai nuo kitų tipų variklių, sukimosi greitis yra labai pastovus. SM gali dirbti G, V ir kompensatoriaus režimu. Elektrinių elektros energijos generatoriai – tai
sinchroninės mašinos: hidroelektrinėse hidrogeneratorius suka vandens turbinos, šiluminėse, atominės turbogeneratorius suka garo turbinos; kai kada SG suka vidaus degimo varikliai. Šiuolaikinių SG galia siekia 1500 MW, projektuojami ir galingesni energoblokai. Galingi SG dažniausiai dirba lygiagrečiai vieni su kitais ir jų gaminama elektros energija tiekiama į bendrą elektros tinklą, energetinę sistemą. Be to, SG yra autonominio maitinimo šaltiniai transporte, lėktuvuose ir kilnojamose elektrinėse.
SV naudojami rečiau, ir tai dažniausia aukštos įtampos galingi varikliai metalurgijos fabrikuose, šachtose, šaldytuvuose, naftotekių kompresorinėse, jie suka valcavimo staklynus, siurblius, ventiliatorius.
Pastaruoju metu gaminamos SM, skirtos dirbti G ir V režimu. Tai hidroakumuliacinių elektrinių SM: apkrovos piko metu SM dirba generatoriaus režimu, o kai elektros energijos paklausa minimali – variklio režimu; tuomet SM suka siurblius, kurie kelia vandenį į viršutinį tvenkinį iš apatinio. Tokios SM dirba Kruonio hidroakumuliacinėje elektrinėje.
Specialūs SV (mažos galios) – mikrovarikliai –plačiai naudojami valdymo ir prietaisų sistemose: el. laikrodžiuose, automatiniuose savirašiuose prietaisuose, programavimo įrenginiuose, garso ir vaizdo įrašymo sistemose ir kt.
SM dar gali dirbti ir kompensatoriaus režimu: tai darbo režimas, kada SM tiekia į tinklą arba iš jo ima reaktyviąją galią.
Kai srovė I pralenkia faze maitinančią įtampą U, ši savybė panaudojama cosϕ gerinimui elektros tinkle.
Sinchroniniai statiniai kompensatoriai įrengiami stambiose
pramonės įmonėse ir pastotėse. Jų trūkumas tas, kad jie reaktyviąją galią gali tik tiekti į tinklą.
a) ryškiapolis rotorius b) neryškiapolis rotorius; 1 – rotoriaus magnetolaidis; 2 – žadinimo apvija;
d-d išilginė ašis; q-q skersinė ašis
SM sudaryta iš statoriaus ir rotoriaus. Statorius nesiskiria nuo AM statoriaus. Jo grioveliuose suklota trifazė apvija. Rotoriai būna 2 pavidalų: ryškiapoliai (hidroelektrinėse – hidrogeneratoriai) ir neryškiapoliai (šiluminėse elektrinėse – turbogeneratoriai). Žadinimo lauką kuria rotoriaus žadinimo apvija tekanti nuolatinė srovė. Taigi, SM darbui būtinas nuolatinės įtampos šaltinis – žadintuvas.
Kai mašina dvipolė (p=1) ir įtampos dažnis f=50 Hz, sukimosi greitis n=3000 aps/min. Tokie dideli greičiai lemia dideles išcentrines jėgas, todėl tada rotoriai ir gaminami neryškiapoliai, o
jų skersmuo neviršija 1,25 m, bet ilgi. Turbogeneratorių rotoriai gaminami iš vientiso aukštos kokybės legiruoto plieno. Rotoriaus
paviršiuje išfrezuojami žadinimo apvijos grioveliai. Ribinių galių (iki 1200 MW) turbogeneratorių rotoriaus žadinimo apvijos dažnai būna superlaidžios (krioturbogeneratoriai); tai leidžia padidinti naudingumo koeficientą iki 99,2% ir sumažinti medžiagų sąnaudas iki 0,5 kg/kW. Rotoriaus ir statoriaus apvijos intensyviai aušinamos dujomis (oru arba vandeniliu) arba skysčiais (vandeniu).
Hidrogeneratorių rotoriaus velenas sujungtas su vandens turbinos velenu. Kadangi rotoriaus sukimosi greitis mažas (428,6 – 62,5 aps/min), tai rotoriaus skersmuo siekia nuo 3,5 iki 12,92m. Hidrogeneratorių masė ir medžiagų sąnaudos didesnės negu turbogeneratorių.
Dabar vis plačiau diegiami kapsuliniai hidrogeneratoriai su horizontaliu velenu. G uždaromas hermetinėje kapsulėje, kuri panardinama vandens sraute (upėje); rotoriaus velenas sujungiamas su
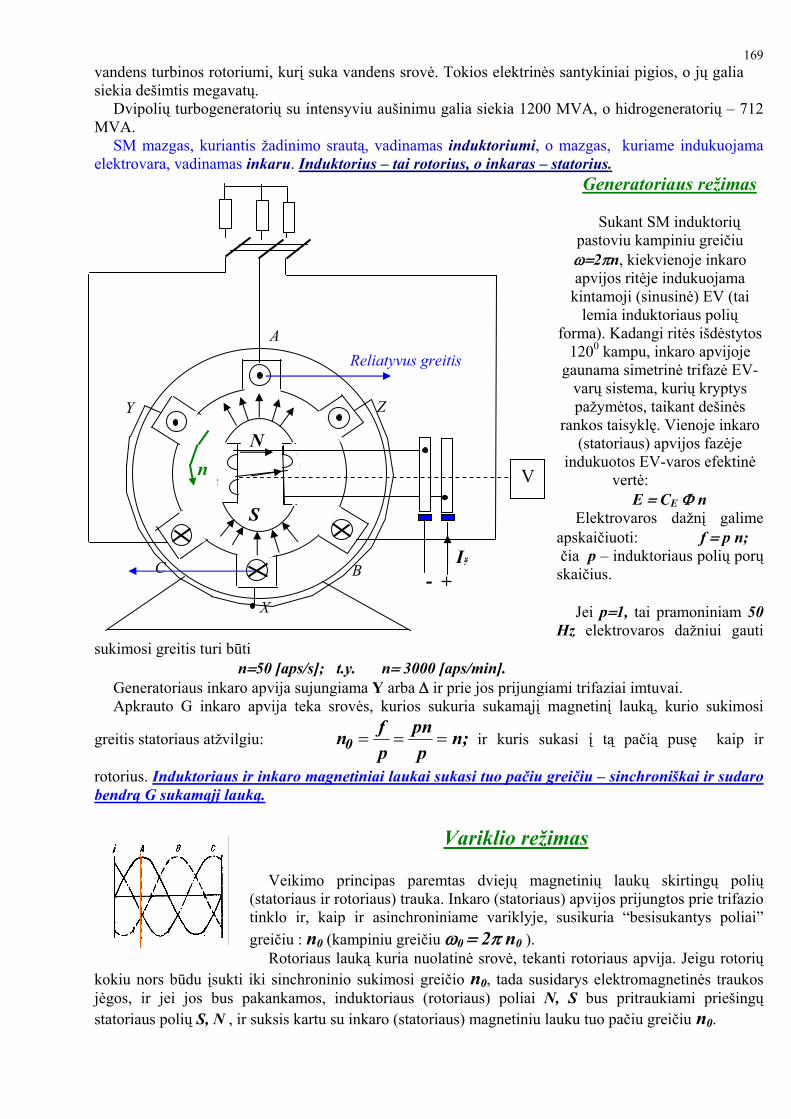
169vandens turbinos rotoriumi, kurį suka vandens srovė. Tokios elektrinės santykiniai pigios, o jų galia siekia dešimtis megavatų.
Dvipolių turbogeneratorių su intensyviu aušinimu galia siekia 1200 MVA, o hidrogeneratorių – 712 MVA.
SM mazgas, kuriantis žadinimo srautą, vadinamas induktoriumi, o mazgas, kuriame indukuojama elektrovara, vadinamas inkaru. Induktorius – tai rotorius, o inkaras – statorius.
Generatoriaus režimas
Sukant SM induktorių pastoviu kampiniu greičiu ω=2πn, kiekvienoje inkaro apvijos ritėje indukuojama
kintamoji (sinusinė) EV (tai lemia induktoriaus polių
forma). Kadangi ritės išdėstytos 1200 kampu, inkaro apvijoje
gaunama simetrinė trifazė EV-varų sistema, kurių kryptys pažymėtos, taikant dešinės
rankos taisyklę. Vienoje inkaro (statoriaus) apvijos fazėje
indukuotos EV-varos efektinė vertė:
E = CE Φ n Elektrovaros dažnį galime
apskaičiuoti: f = p n; čia p – induktoriaus polių porų skaičius.
Jei p=1, tai pramoniniam 50
Hz elektrovaros dažniui gauti sukimosi greitis turi būti
Iž
N
S
V
- +
A
X
B
Y
C
Z
n
Reliatyvus greitis
n=50 [aps/s]; t.y. n= 3000 [aps/min]. Generatoriaus inkaro apvija sujungiama Y arba Δ ir prie jos prijungiami trifaziai imtuvai. Apkrauto G inkaro apvija teka srovės, kurios sukuria sukamąjį magnetinį lauką, kurio sukimosi
greitis statoriaus atžvilgiu: n fp
pnp
n;0 = = = ir kuris sukasi į tą pačią pusę kaip ir
rotorius. Induktoriaus ir inkaro magnetiniai laukai sukasi tuo pačiu greičiu – sinchroniškai ir sudaro bendrą G sukamąjį lauką.
Variklio režimas
Veikimo principas paremtas dviejų magnetinių laukų skirtingų polių
(statoriaus ir rotoriaus) trauka. Inkaro (statoriaus) apvijos prijungtos prie trifazio tinklo ir, kaip ir asinchroniniame variklyje, susikuria “besisukantys poliai” greičiu : n0 (kampiniu greičiu ω0 = 2π n0 ).
Rotoriaus lauką kuria nuolatinė srovė, tekanti rotoriaus apvija. Jeigu rotorių kokiu nors būdu įsukti iki sinchroninio sukimosi greičio n0, tada susidarys elektromagnetinės traukos jėgos, ir jei jos bus pakankamos, induktoriaus (rotoriaus) poliai N, S bus pritraukiami priešingų statoriaus polių S, N , ir suksis kartu su inkaro (statoriaus) magnetiniu lauku tuo pačiu greičiu n0.

170Idealios t.v. režime (pasipriešinimo momentas Ms = 0) rotoriaus ir statoriaus magnetinių laukų
ašys sutampa, o rotoriaus poliai yra veikiami ašinių jėgų F1 ir F2, kurios nesukuria nei sukamojo nei pasipriešinimo momento.
Kampas tarp laukų ašių: Θ = 0;
N
S
N
S
Θ=0 SV rotoriaus sukimosi greitis lygus magnetinio lauko sukimosi
greičiui: n n fp
;0= =
F
F
Jei prie mašinos veleno pridėsime mechaninę apkrovą, kuri sukurs pasipriešinimo momentą Ms, rotoriaus magnetinio lauko ašis atsilenks, atsiliks kampu Θ prieš variklio sukimosi kryptį. s=0 M
Dabar statoriaus sukamasis laukas “ves” paskui save rotorių ir jo lauką. Taigi, dėl rotoriaus stabdymo statoriaus ir rotoriaus laukų ašys nesutaps kampu Θ, kurio dydis ir priklausys nuo Ms.
Tarp polių veiks savitarpio traukos jėgos F, kurių tangentinės dedamosios Fτ sukurs sukimo momentą M, atsveriantį apkrovos momentą, t.y. M = Ms
M = 2Fτ R = 2 F R sinΘ ; čia R – rotoriaus spindulys; Padidinus mechaninę apkrovą,
kampas Θ didėja iki tam tikros ribos; tai veda prie variklio sukimo momento didėjimo, bet rotoriaus sukimosi greitis išlieka toks pat:
n = n0Išvados: 1. SV neturi paleidimo momento;
2. SV gali suktis tik statoriaus magnetinio lauko sukimosi greičiu
n = n0 = 60f/p, kuris nepriklauso nuo apkrovos didumo.
Sinchroninės mašinos inkaro reakcija Jeigu inkaro apvija apkrauta, tai šalia induktoriaus magnetinio lauko bus ir inkaro magnetinis laukas,
kuris tam tikru būdu veiks induktoriaus lauką. Taigi, veikia 2 magnetovaros: 1) žadinimo apvijos (rotoriaus): Fž= Iž wž/p; (Fž → Φž) Čia (wž/p) – žadinimo apvijos vijų skaičius polių porai; wž – bendras žadinimo apvijos vijų skaičius
(ant kiekvieno poliaus po 1 ritę – jei ryškiapolė mašina), sujungtos nuosekliai. 2) inkaro apvijos (statoriaus) : Fa→ Φa (daugiafazės apvijos rezultatinė MV-vara) Inkaro magnetinio lauko poveikį induktoriaus laukui vadinsime inkaro reakcija. (Statoriaus
lauko poveikis žadinimo laukui.) Ji daro didelę įtaką SM ch-koms. Poveikis priklauso nuo srovės dydžio ir fazės. Inkaro reakcijos įtaką SM darbui nagrinėsime G režime supaprastintam neryškiapoliui sinchroniniam generatoriui trims ribinės apkrovos atvejams: R, L, C.
Paprastumo dėlei laikysime, kad magnetolaidis neįsotintas. Induktorius sukamas pastoviu greičiu ir
inkaro apvijos ritėse indukuojama EV. Kai prie G prijungtas simetrinis imtuvas, inkaro apvija teka vienodų amplitudžių, besiskiriančios faze 1200 srovės. Išskirsime laiko momentą t, kai A fazės srovė maksimali.
1) Inkaro srovės Ia ir elektrovaros Ea fazės sutampa , kampas tarp jų Ψ=0 ( Apkrova iš tiesų R-C pobūdžio, nes C turės kompensuoti apvijos induktyvumą L – sinchroninę reaktyviąją varžą)
N
S
Ms Fr
n=n0
F
Θ
N
S
Fτ
M
>0
n=n0

171 Šiuo atveju EV Ea ir srovė Iaq pasiekia maksimalias vertes vienu metu, kai induktoriaus (rotoriaus)
magneto N-S ašis sutampa su inkaro (statoriaus) apvijų A-x plokštuma. Srovę Iaq kuria magnetovara Faq
(srautas Φaq).
Inkaro EV ir srauto kryptys nustatytos pagaldešinės rankos taisyklę.
Ea visada pralenkia Φž 900 kampu
N N
q q
R-(C)
n=n0
Φaq
Φž
Ea Iaq
Ψ=0 S
Inkaro fazės EV
Θ<0
Matome, kad inkaro reakcijos srautasΦaq yra skersinėje ašyje q-q (kur magnetinio srauto tankis yra mažiausias, labiausiai nutolęs nuo poliaus N vidurio). Tokia inkaro reakcija vadinama skersine
Braižymo seka:
1) Atskaitos vektorius magnetinis srautas Φž; (orientuojame analogiškai abiejuose paveiksluose); 2) Ea pralenkia srautą 900 kampu; (kaip transformatoriuje, ten tai įrodėme); 3) Brėžiame Iaq, sutampančią faze su elektrovara Ea, nes tai išplaukia iš pasirinkto apkrovos tipo; 4) Teigiama srovė Iaq sukuria neigiamą srautą Φaq (remiantis čia pasirinkta ženklų sistema); 5) Φaq ir Φž vektorinė suma yra suminis (oro tarpo) mašinos magnetinis srautasΦ.
Atkreipsime dėmesį, kad: 1. Kai mašina neįsotinta, skersinė inkaro reakcija Φaq “pasuka” suminio magnetinio lauko ašies padėtį
induktoriaus atžvilgiu, suminis laukas turėtų ryškiai padidėti, bet to realiai neįvyksta dėl įsotinimo. Jei mašinos magnetinė sistema įsotinta, realiai suminio srauto Φ dydis padidės nežymiai arba net sumažės.
2. Sukant induktorių, inkaro reakcijos laukas sukasi sinchroniškai ir todėl srautų padėtis nepasikeis. 3. Inkaro reakcijos srautas Φaą faze 900 kampu atsilieka nuo induktoriaus polių srauto Φž . 4. Atstojamasis srautas Φ = Φž + Φa pasisuka srauto Φž atžvilgiu kampu Θ kryptimi, priešinga rotoriaus
sukimosi krypčiai. Generatoriui šis kampas laikomas neigiamu, Θ < 0.
Poveikis: • Jei magnetinė grandinė būtų neįsotinta, tai būtų indukuojamos nemažos papildomos EV inkaro
apvijoje; • Realiai dėl įsotinimo pasireiškia išmagnetinantis skersinės inkaro reakcijos poveikis (vienur stiprina,
kitur silpnina; stiprinimas nejaučiamas dėl soties, silpninimas yra ženklus); • Dėl šios inkaro reakcijos sumažėja G įtampa, jį apkrovus. Taigi reikės padidinti žadinimo srovę,
norint atstatyti įtampą 2) Apkrova induktyvioji (nepaisome inkaro apvijos aktyviosios varžos) - L, srovė Iad atsiliks
nuo elektrovaros Ea 900 kampu , Ψ=900
Φ
Θ
Erdviniai vektoriai srautų
Φ
Laiko (E ir I) ir erdvės (srautųΦ ) vektorių vaizdai analogiški
ž Φ
Φaq

172 Reliatyviai piešiame magneto polius N-S , pralenkiančius srovę
Braižymo seka:
N
N d
1) Pirmiausiai brėžiame srautą Φž; 2) Toliau Ea, 900 kampu pralenkiančią srautą Φž; 3) Po to brėžiame srovę Iad, atsiliekančią nuo elektrovaros 900 kampu, nes apkrova – induktyvioji. 4) Teigiama srovė Iad sukurs neigiamą srautą Φad. (remiantis čia pasirinkta ženklų sistema); 5) Suminis mašinos srautas Φ yra vektorinė sumaΦ = Φž + Φad arba skirtumas moduliams
Φ = Φž - Φad
Išvados: 1. Šiuo atveju Iad srovė pasieks maksimumą vėliau, tada, kai rotoriaus magneto ašis N-S bus jau
pasisukusi sukimo kryptimi 900 kampu. 2. Inkaro reakcijos srauto Φad kryptis priešinga statoriaus polių srautui Φž. Dėl to suminis srautasΦ ir
tuo pačiu generatoriaus elektrovara sumažės. 3. SrautasΦ yra išilginėje mašinos ašyje d-d. 4. Tai išilginė išmagnetinanti inkaro reakcija. Ji silpnina žadinimo magnetinį lauką.
3) Apkrova talpinė - C, (nepaisome aktyviosios varžos) srovė Iad pralenks EV Ea 900 kampu ,
Ψ= - 900
Šiuo atveju inkaro srovė Iad pasiekia amplitudinę vertę ketvirtadaliu periodo anksčiau nei EV Ea.
Induktoriaus ir inkaro kuriamų srautų kryptys sutaps. Tai – išilginė įmagnetinanti inkaro reakcija. Ji stiprina žadinimo magnetinį lauką.
4) paprastai sinchroninio generatoriaus apkrova mišri,
N
N d Φ d
Φad
C
S
Φad Φž
Ea
Iad
Ψ= -90
Φn=n0
Φž
Φ d Φž Φad
L n=n0 ΦΦ ad ž
S
Iad
Ψ=90
E
Φ
a
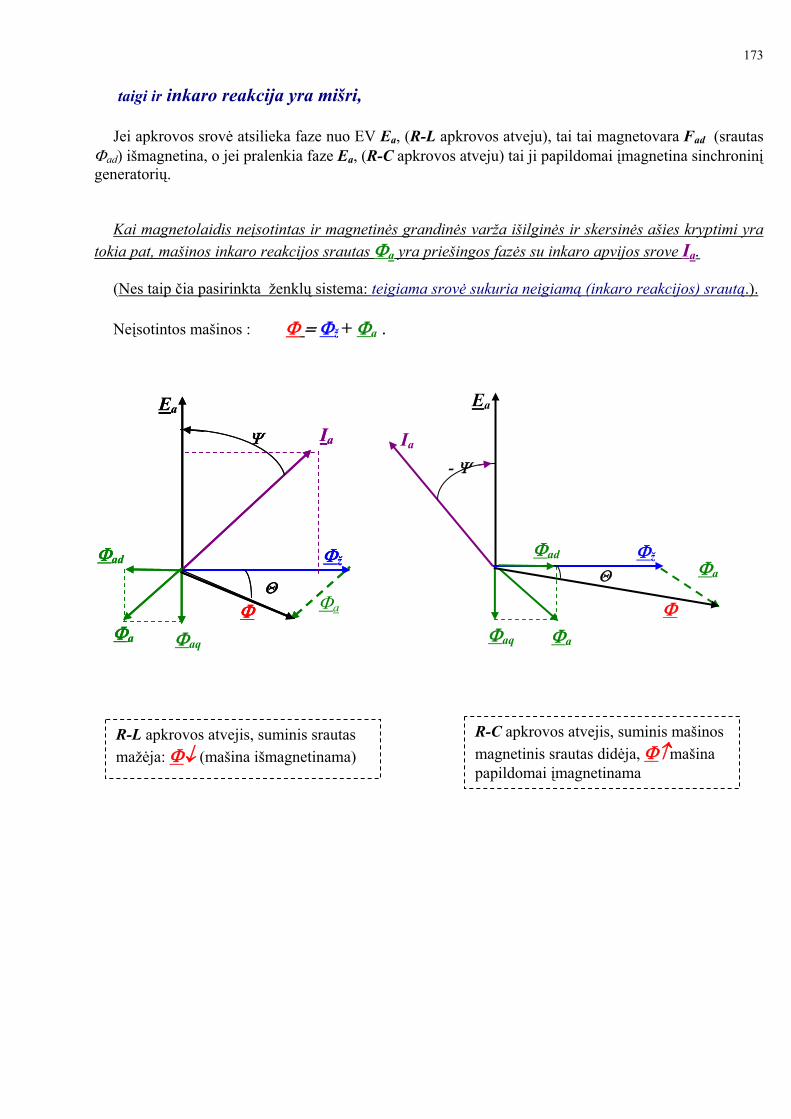
173 taigi ir inkaro reakcija yra mišri, Jei apkrovos srovė atsilieka faze nuo EV Ea, (R-L apkrovos atveju), tai tai magnetovara Fad (srautas
Φad) išmagnetina, o jei pralenkia faze Ea, (R-C apkrovos atveju) tai ji papildomai įmagnetina sinchroninį generatorių.
Kai magnetolaidis neįsotintas ir magnetinės grandinės varža išilginės ir skersinės ašies kryptimi yra
tokia pat, mašinos inkaro reakcijos srautas Φa yra priešingos fazės su inkaro apvijos srove Ia. (Nes taip čia pasirinkta ženklų sistema: teigiama srovė sukuria neigiamą (inkaro reakcijos) srautą.). Neįsotintos mašinos : Φ = Φž + Φa .
EEa
Φaq
Φž Φad
IaΨ
Φa
Φ Θ
a
Φaq
Φž Φad
Φa
Φ
Θ
Ia
- Ψ
Φa
Ea
I
Φž Φad
Ψ a
Θ
Φa
Φ Φ
R-L apkrovos atvejis, suminis srautas mažėja: Φ↓ (mašina išmagnetinama)
R-C apkrovos atvejis, suminis mašinos magnetinis srautas didėja, Φ↑
mašina
papildomai įmagnetinama
a
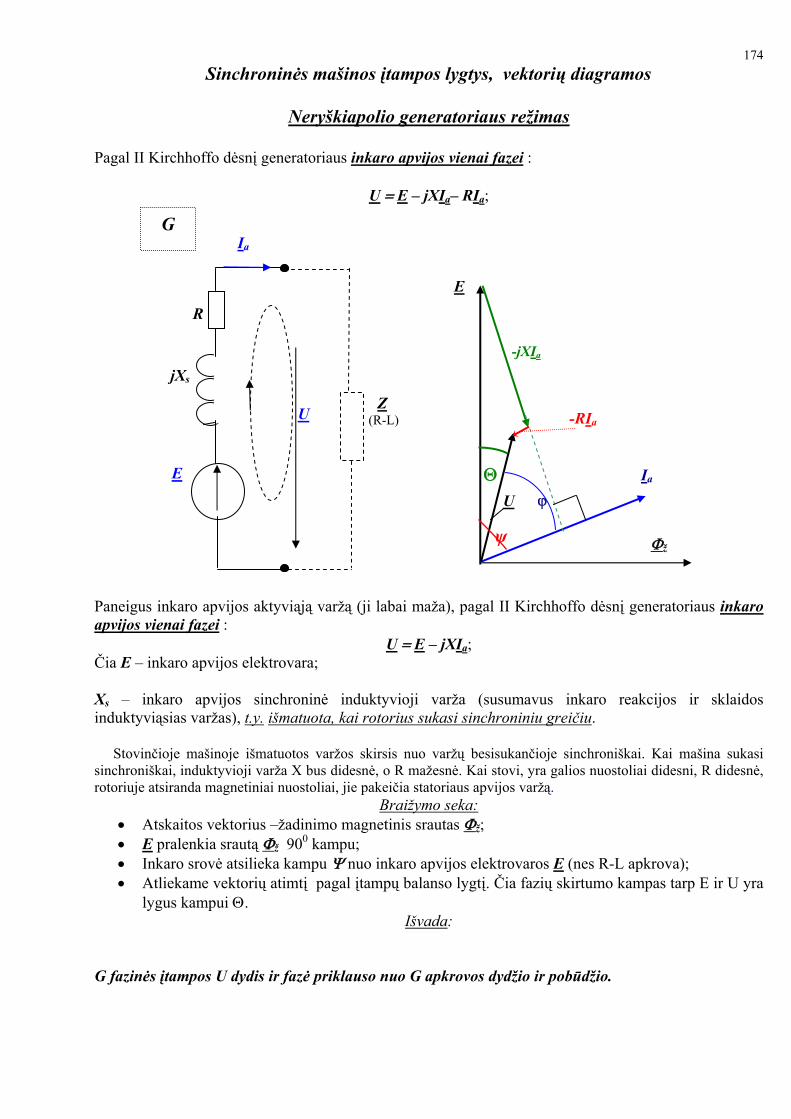
174Sinchroninės mašinos įtampos lygtys, vektorių diagramos
Neryškiapolio generatoriaus režimas
Pagal II Kirchhoffo dėsnį generatoriaus inkaro apvijos vienai fazei :
U = E – jXIa– RIa;
Paneigus inkaro apvijos aktyviąją varžą (ji labai maža), pagal II Kirchhoffo dėsnį generatoriaus inkaro apvijos vienai fazei :
U = E – jXIa; Čia E – inkaro apvijos elektrovara; Xs – inkaro apvijos sinchroninė induktyvioji varža (susumavus inkaro reakcijos ir sklaidos induktyviąsias varžas), t.y. išmatuota, kai rotorius sukasi sinchroniniu greičiu.
Stovinčioje mašinoje išmatuotos varžos skirsis nuo varžų besisukančioje sinchroniškai. Kai mašina sukasi sinchroniškai, induktyvioji varža X bus didesnė, o R mažesnė. Kai stovi, yra galios nuostoliai didesni, R didesnė, rotoriuje atsiranda magnetiniai nuostoliai, jie pakeičia statoriaus apvijos varžą.
Braižymo seka: • Atskaitos vektorius –žadinimo magnetinis srautas Φž; • E pralenkia srautą Φž 900 kampu; • Inkaro srovė atsilieka kampu Ψ nuo inkaro apvijos elektrovaros E (nes R-L apkrova); • Atliekame vektorių atimtį pagal įtampų balanso lygtį. Čia fazių skirtumo kampas tarp E ir U yra
lygus kampui Θ. Išvada:
G fazinės įtampos U dydis ir fazė priklauso nuo G apkrovos dydžio ir pobūdžio.
jXs
Z (R-L)
Ia
E
G
U
E
R
Φž
Ia Θ U ϕ
-jXIa
ψ
-RIa

175Ryškiapolio generatoriaus režimas
Φž
E
Ia
Tekėdama inkaro apvija, srovė papildomai (dėl saviindukcijos) sukuria 2: inkaro reakcijos
Φa = Φad + Φaq ir sklaidos Φaσ magnetinius laukus. Atsižvelgus į pasirinktą ženklų sistemą, jie priešingos fazės, kaip juos kuriančios srovės Ia dedamosios: išilginė Id ir skersinė Iq
Šie srautai susiję su inkaro apvija ir indukuoja joje 900 pralenkiančias elektrovaras: Ea (susidarančią iš išilginės, skersinės: Ea= Ead+ Eaq) ir sklaidos Eaσ.
Šias elektrovaras galima pakeisti atitinkamais įtampų kritimais. Taigi, statoriaus įtampas sudaro:
• Fž → Φž → E; (žadinimo apvijos sukurtas pagrindinis srautas, ir jį 90 pralenkianti elektrovara, t.y., lygi srauto išvestinei)
0
• Fad → Φad → Ead = Iad jXd; (dėl išilginės inkaro reakcijos poveikio); • Faq → Φaq → Eaq = Iaq jXq; (dėl skersinės inkaro reakcijos poveikio);
Magnetiniai srautai Φad,Φaq juda oro tarpe sinchroniškai su rotoriumi, taigi, jie kerta inkaro laidininkus, indukuodami fazėse išilginę ir skersinę EV.
• Faσ→ Φaσ → Eaσ = Ia jXaσ ; (sklaidos srautas). Srauto Φaσ neskaidome į dedamąsias, nes jis
nepriklauso nuo rotoriaus padėties, laikome, kad magnetinė varža (arba magnetinis laidis) sklaidos srautui nesikeičia.
• Ua = IaR1 (įtampa krenta aktyviojoje statoriaus (inkaro) apvijos varžoje);
Φa Φaσ
Ea
Eaσ
Id
Eaq
Ead
Φad
Φaq
Iq Ryškiapolėje mašinoje proporcijos tarp srovių ir srautų skirtingos, nes yra skirtingos magnetinės varžos (magnetiniai laidžiai) skersai ir išilgai. Srovė Ia (kurios dydis ir ypač fazė priklauso nuo apkrovos pobūdžio), išskiriama į vienodas dedamąsias, kurios sukuria nevienodus srautus.

176Nuo jų visų priklausys apkrauto sinchroninio generatoriaus įtampa.
Pastebėsime, kad sinchroninė varža Xs priklauso nuo srovės fazės elektrovaros atžvilgiu (ψ), nuo reakcijos pobūdžio, nuo to, kokiu keliu užsidaro magnetinis srautas
Sinchroninio ryškiapolio generatoriaus fazės įtampų pusiausvyros lygtis (atstojamoji schema paprastai
nesudaroma, todėl, kad fiziškai sudėtinga srovę išskaidyti į dedamąsias,(atskirti, kur tekės viena dedamoji, kur kita), lengva tik matematiškai, iš tiesų laidais teka viena bendra srovė, o dedamosios-tai tik dirbtinis skaidymas, )
U = E - jXad Id – jXaq Iq - jXaσIa - RaIa Čia U – generatoriaus gnybtų įtampa; E – žadinimo srovės indukuota elektrovara; Ia – inkaro apvijos srovė; Xad - inkaro reakcijos išilginė reaktyvioji (induktyvioji) varža; (Xad> Xaq) Xaq- inkaro reakcijos skersinė reaktyvioji (induktyvioji) varža; Xaσ– inkaro apvijos sklaidos induktyvioji varža; Ra – inkaro apvijos aktyvioji varža. Ra << Xa (todėl kartais paneigiamas įtampos kritimas (RaIa),
nes jis tesudaro 1-2 %) . Priėmę, kad : Xd = Xad + Xaσ ; Xq = Xaq + Xaσ ; (Xd> Xq) gausime:
U = E – jXd Id – jXq Iq – RaIa;
Arba ( E= U+ jXd Id+ jXq Iq+ RaIa;)
čia Xd – išilginė sinchroninė reaktyvioji (induktyvioji) varža; Xq – skersinė sinchroninė reaktyvioji (induktyvioji) varža.
Iš vektorinęs diagramos: Ia = Id + Iq;
Id = Ia sin Ψ; -inkaro išilginė fazinė srovė; Iq= Ia cos Ψ; -inkaro skersinė fazinė srovė; Ψ- kampas tarp inkaro srovės ir elektrovaros vektorių; ϕ - kampas tarp inkaro srovės ir įtampos vektorių; Θ - apkrovos kampas (kampas tarp inkaro apvijos elektrovaros E ir įtampos U vektorių.
Matome, kad generatoriaus įtampos dydis ir fazė priklauso nuo generatoriaus apkrovos dydžio ir pobūdžio.
Išvados iš vektorinės diagramos:
pagrindinis faktorius, veikiantis apkrauto G įtampos
pakitimą, yra inkaro magnetinio srauto išilginė dedamoji, sukurianti evj. Ead;
kai SG apkrautas R-L apkrova, t.y. kai Ia atsilieka faze nuo E, tai, didėjant apkrovai, įtampa U mažėja dėl inkaro reakcijos išmagnetinančios įtakos.
Kai SG apkrautas R-C apkrova, t.y. kai Ia pralenkia faze E , tai, didėjant apkrovai, įtampa U didėja dėl inkaro reakcijos papildomo įmagnetinimo.
Φž
Palyginus su neryškiapoliu, čia nėra statmenumo (punktyras). Nors srovės dedamosios vienodos, tačiau įtampų kritimai nevienodi. Tarytum būtų įtampos kritimas sinchroninėje varžoje X, priklausantis nuo srovės fazės evj E atžvilgiuΨ. Dėl to atsiranda aktyvioji galia.

177 Skersinė srovės dedamoji Iq sutampa faze su elektrovara E!
Sinchroninio generatoriaus (dirbančio pavieniui) charakteristikos
1. Tuščiosios veikos ch-ka : E = f(Iž), kai Ia = 0,
n=const. Paprastai braižomos kylanti ir krintanti ch-kos šakos, kurios dėl
magnetinės grandinės histerezinių savybių nesutampa. (jei pilną kilpą braižyti, tai nebus nuo 0) Iž
2. Trumpojo jungimo ch-ka: Ia tr=f(Iž),
kai U= 0, n = nN;
Ją galima gauti trumpojo jungimo bandymu, statoriaus apvijos gnybtus sujungus trumpai. Rotorius sukamas vardiniu greičiu. Mašina žadinama, didinant žadinimo srovę iki inkaro srovės vertės, 25 % viršijančios
Eaσ
Pagrindinis magnetinis srautas labai mažas, o tai reiškia, kad mašinos magnetinė grandinė neprisotinta. Dėl to trumpojo jungimo ch-ka yra tiesė. (Panašiai kaip ir nuolatinės srovės generatoriaus atveju)
Aktyvioji statoriaus apvijos varža yra maža, palyginus su induktyviąja. Ją paneigus, laikysime, kad tr.j. bandymo metu SG apkrova (jo paties apvijos) yra grynai
induktyvinė ir todėl SG inkaro reakcija yra išilginė išmagnetinanti. Tai rodo vektorinė diagrama: Etr, indukuojamą statoriaus apvijoje, atsveria išilginės inkaro reakcijos
ir sklaidos EV: Etr = Ead + Eaσ Žadinimo apvijos magnetovarą tartum sudaro dvi dedamosios: viena kompensuoja įtampos kritimą
jIaXσ, o kita – inkaro reakcijos išmagnetinantį poveikį jIdXad,
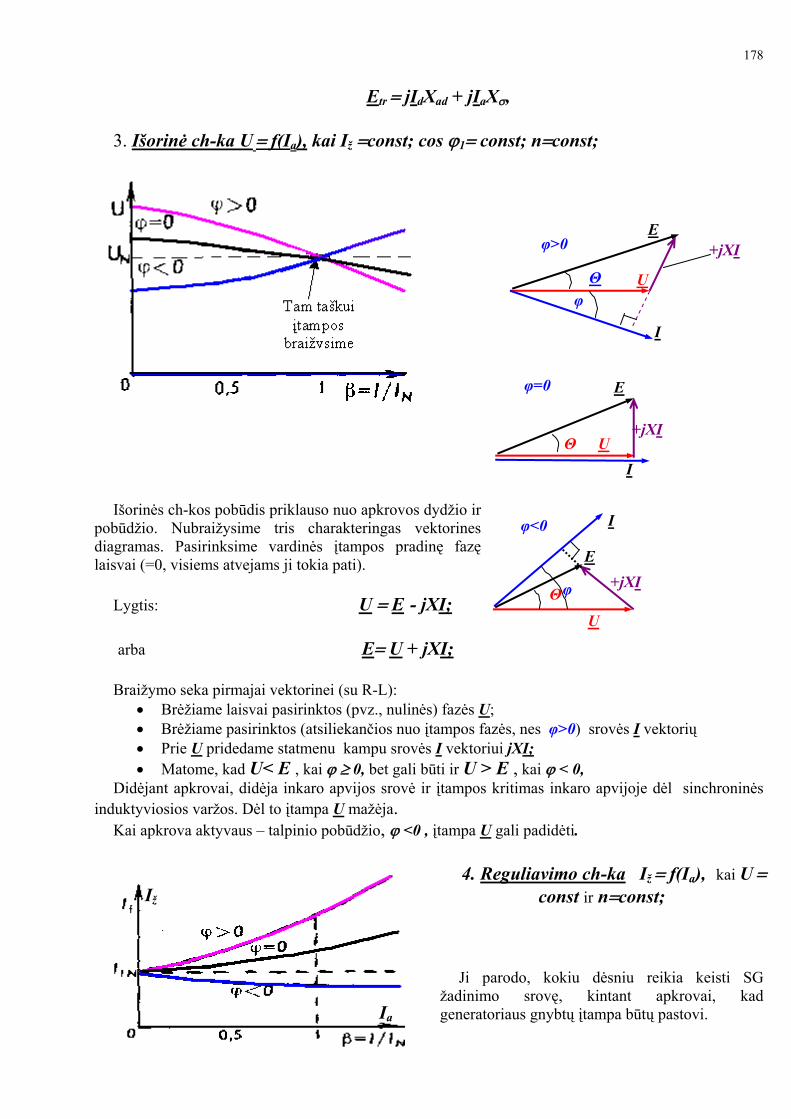
178
Etr = jIdXad + jIaXσ,
3. Išorinė ch-ka U = f(Ia), kai Iž =const; cos ϕ1= const; n=const;
Išorinės ch-kos pobūdis priklauso nuo apkrovos dydžio ir
pobūdžio. Nubraižysime tris charakteringas vektorines diagramas. Pasirinksime vardinės įtampos pradinę fazę laisvai (=0, visiems atvejams ji tokia pati).
Lygtis: U = E - jXI; arba E= U + jXI; Braižymo seka pirmajai vektorinei (su R-L):
• Brėžiame laisvai pasirinktos (pvz., nulinės) fazės U; • Brėžiame pasirinktos (atsiliekančios nuo įtampos fazės, nes φ>0) srovės I vektorių • Prie U pridedame statmenu kampu srovės I vektoriui jXI; • Matome, kad U< E , kai ϕ ≥ 0, bet gali būti ir U > E , kai ϕ < 0,
Didėjant apkrovai, didėja inkaro apvijos srovė ir įtampos kritimas inkaro apvijoje dėl sinchroninės induktyviosios varžos. Dėl to įtampa U mažėja.
Kai apkrova aktyvaus – talpinio pobūdžio, ϕ <0 , įtampa U gali padidėti.
4. Reguliavimo ch-ka Iž = f(Ia), kai U = const ir n=const;
Ji parodo, kokiu dėsniu reikia keisti SG
žadinimo srovę, kintant apkrovai, kad generatoriaus gnybtų įtampa būtų pastovi.
E φ>0
U
E
U
φ=0
U
φ<0
I
Θ φ
+jXI
I Θ
I
E
+jXI
+jXIΘ φ
Iž
Ia
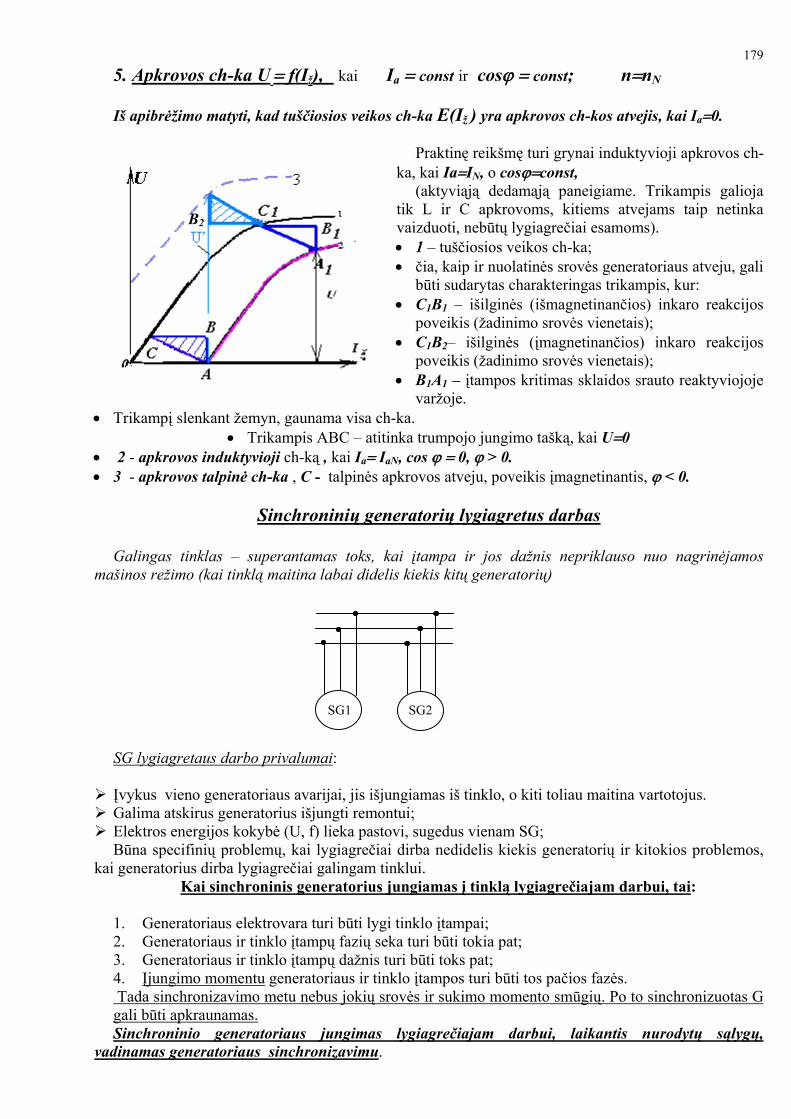
1795. Apkrovos ch-ka U = f(Iž), kai Ia = const ir cosϕ = const; n=nN Iš apibrėžimo matyti, kad tuščiosios veikos ch-ka E(Iž ) yra apkrovos ch-kos atvejis, kai Ia=0.
Praktinę reikšmę turi grynai induktyvioji apkrovos ch-ka, kai Ia=IN, o cosϕ=const,
B2
A (aktyviąją dedamąją paneigiame. Trikampis galioja tik L ir C apkrovoms, kitiems atvejams taip netinka vaizduoti, nebūtų lygiagrečiai esamoms). • 1 – tuščiosios veikos ch-ka; • čia, kaip ir nuolatinės srovės generatoriaus atveju, gali
būti sudarytas charakteringas trikampis, kur: • C1BB1 – išilginės (išmagnetinančios) inkaro reakcijos
poveikis (žadinimo srovės vienetais); • C1BB2– išilginės (įmagnetinančios) inkaro reakcijos
poveikis (žadinimo srovės vienetais); • BB1A1 – įtampos kritimas sklaidos srauto reaktyviojoje
varžoje. • Trikampį slenkant žemyn, gaunama visa ch-ka.
• Trikampis ABC – atitinka trumpojo jungimo tašką, kai U=0 • 2 - apkrovos induktyvioji ch-ką , kai Ia= IaN, cos ϕ = 0, ϕ > 0. • 3 - apkrovos talpinė ch-ka , C - talpinės apkrovos atveju, poveikis įmagnetinantis, ϕ < 0.
Sinchroninių generatorių lygiagretus darbas
Galingas tinklas – superantamas toks, kai įtampa ir jos dažnis nepriklauso nuo nagrinėjamos mašinos režimo (kai tinklą maitina labai didelis kiekis kitų generatorių)
SG1 SG2
SG lygiagretaus darbo privalumai:
Įvykus vieno generatoriaus avarijai, jis išjungiamas iš tinklo, o kiti toliau maitina vartotojus. Galima atskirus generatorius išjungti remontui; Elektros energijos kokybė (U, f) lieka pastovi, sugedus vienam SG; Būna specifinių problemų, kai lygiagrečiai dirba nedidelis kiekis generatorių ir kitokios problemos,
kai generatorius dirba lygiagrečiai galingam tinklui. Kai sinchroninis generatorius jungiamas į tinklą lygiagrečiajam darbui, tai:
1. Generatoriaus elektrovara turi būti lygi tinklo įtampai; 2. Generatoriaus ir tinklo įtampų fazių seka turi būti tokia pat; 3. Generatoriaus ir tinklo įtampų dažnis turi būti toks pat; 4. Įjungimo momentu generatoriaus ir tinklo įtampos turi būti tos pačios fazės. Tada sinchronizavimo metu nebus jokių srovės ir sukimo momento smūgių. Po to sinchronizuotas G gali būti apkraunamas. Sinchroninio generatoriaus jungimas lygiagrečiajam darbui, laikantis nurodytų sąlygų,
vadinamas generatoriaus sinchronizavimu.

180
Nesilaikant kurios nors sinchronizavimo sąlygos, statoriaus apvijoje atsiranda didelės išlyginančios
srovės, galinčios sukelti avariją. Patenkinus pirmąsias 3 sąlygas, SG įtampa dar gali nesutapti faze su tinklo įtampa. Fazių sutapimas kontroliuojamas sinchronoskopu. Paprasčiausias sinchronoskopas yra 3
kaitinamosios lempos, įjungtos tarp G inkaro apvijos fazių pradžių ir tinklo. Kai G ir tinklo įtampos nesutampa faze, lempos šviečia, o kai sutampa, lempos užgęsta. (Žr. lab.
darbą). Elektrinėse naudojami sudėtingi automatiniai sinchronizatoriai, kurie visas operacijas atlieka
automatiškai.
Sinchroninio generatoriaus darbas lygiagrečiai galingam tinklui
Iki šiol nagrinėjome SG lygiagretųjį darbą, kai Ea=E=const. (Iž buvo = const)
-UT UG -UT
Dabar panagrinėsime, kas bus, kai sinchronizavus SG, (tada SG dirbs lygiagrečiojo darbo režimu), ryškiai keisime žadinimo srovę.
Matysime, kad keičiant žadinimą, keičiasi tik reaktyvioji galia. Aktyvioji galia P= 0 išlieka lygi nuliui (dirbant SG lygiagrečiai tinklui, SG-riaus apkrovą suvokiame kaip išvystomą aktyviąją galią.)
• I. v.d. Kai mašina dirba lygiagrečiai su tinklu Ia = 0,( ir P= 0;) Ir jo elektrovara atitinka sąlygą: E= - UT Tai matome ir vektorinėje diagramoje.
• II. v.d. Padidinus žadinimo srovę Iž, tarkime gauname E>UT, tada inkaro apvija tekės srovė Ia, kuri atsilieka 900 kampu nuo E ir U (Ψ =ϕ=900) . Šiuo atveju mašina atiduos į tinklą reaktyviąją galią, tačiau P=0. Vadinasi, padidinus žadinimą, SG apkraunamas induktyviąja srove, o tinklas – talpine srove. • III. v.d Jeigu sumažinti žadinimo srovę Iž taip, kad E<UT, tada inkaro srovė pralenks E ir U 900 kampu (Ψ = ϕ = - 900). Šiuo atveju mašina ims iš tinklo reaktyviąją galią. Tačiau ir čia P=0. Vadinasi, srovė yra talpinė SG atžvilgiu, ir induktyvioji tinklo atžvilgiu.
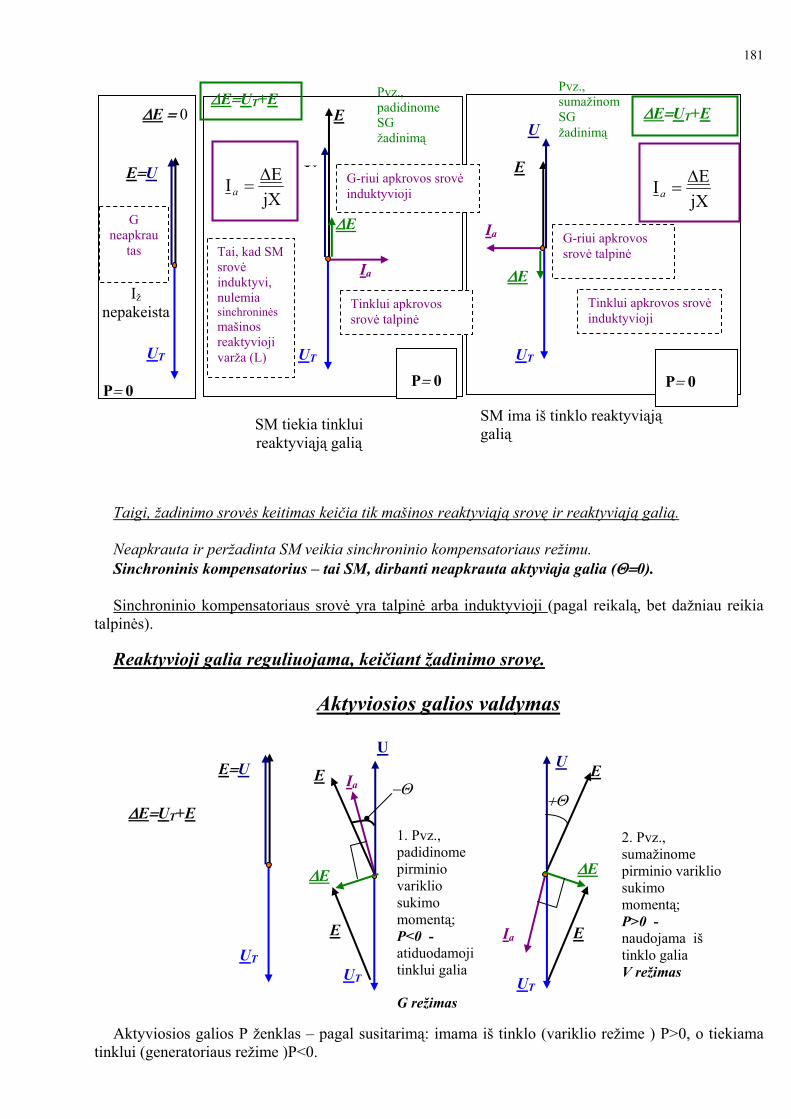
181
U
UT
ΔE
Ia
E=U
UT
Ia
UT
E
ΔE
U E ΔE=UT+E
Pvz., sumažinom SG žadinimą
ΔE=UT+E ΔE = 0
Tinklui apkrovos srovė talpinė
G-riui apkrovos srovė induktyvioji
Tai, kad SM srovė induktyvi, nulemia sinchroninės mašinos reaktyvioji varža (L)
jXEI Δ
=a
G-riui apkrovos srovė talpinė
Tinklui apkrovos srovė induktyvioji
jXEI Δ
=a
G neapkrau
tas
P= 0 P= 0 P= 0
SM tiekia tinklui reaktyviąją galią
SM ima iš tinklo reaktyviąją galią
Iž nepakeista
Pvz., padidinome SG žadinimą
Taigi, žadinimo srovės keitimas keičia tik mašinos reaktyviąją srovę ir reaktyviąją galią. Neapkrauta ir peržadinta SM veikia sinchroninio kompensatoriaus režimu. Sinchroninis kompensatorius – tai SM, dirbanti neapkrauta aktyviąja galia (Θ=0). Sinchroninio kompensatoriaus srovė yra talpinė arba induktyvioji (pagal reikalą, bet dažniau reikia
talpinės).
Reaktyvioji galia reguliuojama, keičiant žadinimo srovę.
Aktyviosios galios valdymas
U
Aktyviosios galios P ženklas – pagal susitarimą: imama iš tinklo (variklio režime ) P>0, o tiekiama tinklui (generatoriaus režime )P<0.
UT
ΔE
Ia E=U
UT
Ia
UT
EU
ΔE
1. Pvz., padidinome pirminio variklio sukimo momentą; P<0 - atiduodamoji tinklui galia
G režimas
E
ΔE=UT+E −Θ
+Θ
2. Pvz., sumažinome pirminio variklio sukimo momentą; P>0 - naudojama iš tinklo galia V režimas
E E

1821. Norint generatorių apkrauti (kad G tiektų į tinklą aktyviąją galią), reikia padidinti jį sukančio pirminio variklio (garo ar vandens turbinos) sukimo momentą (t.y. bent trumpam (p.p.) laikui padidinti sukimosi greitį). Tuomet E vektorius, nekeisdamas ilgio, užbėga į priekį kampu Θ, atsiranda ΔE, kuri ir sukuria srovę. Srovė turi ryškią aktyvią dedamąją, mašina veiks G režimu, atiduodama aktyvią galią tinklui. Bet tada atsiranda stabdantis momentas ir darosi sunkiau sukti tuo padidintu greičiu ir todėl nusistovi buvęs sinchroninis greitis. 2. O jei bandysime stabdyti, mažinti sukimosi greitį, bent trumpam laikui (pereinamajam procesui), tai E vektorius atsiliks kampu Θ, atsiras neišbalansuota elektrovara ΔE ir srovė, naudojanti aktyviąją galią iš tinklo, tuo pačiu atsiras ir varantysis sukimo momentas – mašina pereis į variklio režimą, stengdamasi išlaikyti tą patį sinchroninį sukimosi greitį.
Taigi, aktyviąją galią galime valdyti, keisdami sukimo momentą: varantį (G) arba stabdantį (V).
Jeigu drauge vieno ar kito režimo atveju keisime žadinimo srovę, tai taip pat galėsime valdyti reaktyviąją galią. Tai yra nepaprastai reikšmingas sinchroninės mašinos privalumas, lyginant su asinchronine mašina. Todėl, kad ir generatorius, ir variklis gali ir naudoti, ir atiduoti reaktyviąją galią. Jei norime, gali veikti su cosϕ =1. Tai geriausia tos mašinos atžvilgiu, bei gretimos asinchroninės mašinos, kaip taisyklė, reikalauja reaktyviosios galios, todėl sinchroninės mašinos dažniausiai projektuojamos taip, kad, išvystydamos vardinę aktyviąją galią, dar galėtų atiduoti tam tikrą reaktyviąją galią. (Vardinis būna cosϕ = 0,8).
Esant reikalui, gali veikti su kokiu nori cosϕ , svarbu tik neperkrauti srovėmis. Pvz., sinchroninio kompensatoriaus režime cosϕ ≈ 0. Ir tai normalu.
Kampinė charakteristika
Ji sudaroma, kai yra fiksuota įtampa, kai SG dirba galingam tinklui; tada nebetinka anksčiau aptartos pavienio SG ch-kos, jos nebetenka prasmės, (nes ten įtampa keitėsi),
išskyrus reguliavimo ch-ką (bet juk ji ir sudaroma, palaikant pastovią įtampą).
Sinchroninės mašinos kampine charakteristika yra vadinama jos aktyviosios galios arba elektromagnetinio momento priklausomybė nuo kampo Θ:
P=f(Θ) arba M=f(Θ) Bendruoju atveju trifazės mašinos
Pem= P= 3 UI cosφ; Čia U, I – generatoriaus fazinė įtampa ir srovė.
Braižysime SG inkaro apvijos vektorinę diagramą vienai fazei, laikydami, kad srovė skiriasi faze kampu ϕ. Apytiksliai įtampų pusiausvyros lygtis neryškiapolei mašinai: E=U+ jXI
+1
+j
U
A
Ef
jXI
Ψ
Θ
ϕ 0
D
C
I
B
Ψ
Iš tšk. C išvedame statmenis į OD ir OA. Iš stačiųjų Δ OAC ir OAD statinis OA:
U cosϕ = Ef cosΨ (1)
Iš stačiųjų Δ BCD ir OCB statinis BC (dviejų trikampių
kampai su atitinkamai statmenomis kraštinėmis yra lygūs): XI cosΨ= U sinΘ. Iš čia:
IXU Θ
=Ψsincos .

183Įstatome cosΨ išraišką į (1) ir gauname :
Θ= sincosIX
UEU fϕ ; padauginame iš srovės I ir gauname
galią:
Θ= sincosIXIUE
UI fϕ ;
Θ= sinX
UEP f
Aktyvioji galia vienai fazei. Matome, kad tai sinusinė kampo Θ funkcija, kurios maksimali vertė bus:
;max XUE
P f= - didžiausia tos galios vertė
Visoms trims fazėms būtų: Θ= sin3X
UEP
Tai galioja ir sinchroninio variklio galiai skaičiuoti (nepaisant variklio nuostolių galios). Kadangi
pasirinkome, jog variklio Θ >0, o generatoriaus Θ <0, tada mašinos aktyvioji galia P<0 (generatoriui) arba P>0 (varikliui), priklausomai nuo SM darbo režimo.
Bendruoju atveju: P = Pmax sin Θ (2)
Elektromagnetinis generatoriaus pasipriešinimo ar variklio sukimo momentas
;Ω
= emPM
čia Ω - mašinos rotoriaus kampinis greitis; Prisiminę, kad P=Pem
Ir įrašę galios vertę iš (2), gausime: ;sinP
M max
ΩΘ
=
(Matome, kad ir momentas M – sinusinė kampo Θ funkcija. Žinome, kad P = Ω M; tada Pmax / Ω = Mmax;)
M = Mmax sinΘ
Čia ;max XUE
MΩ
=
- didžiausio mašinos elektromagnetinio momento vertė vienai fazei. Trims fazėms – daugintume iš 3.
;3
max XEU
MΩ
=
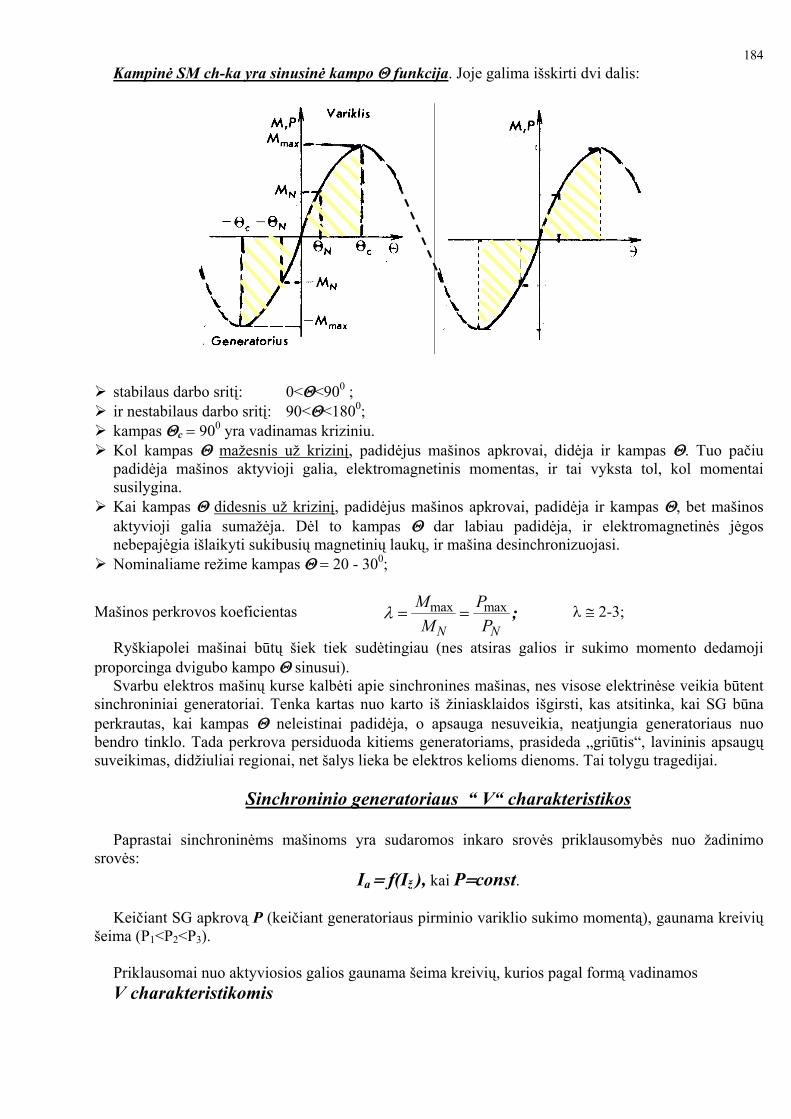
184Kampinė SM ch-ka yra sinusinė kampo Θ funkcija. Joje galima išskirti dvi dalis:
stabilaus darbo sritį: 0<Θ<900 ; ir nestabilaus darbo sritį: 90<Θ<1800; kampas Θc = 900 yra vadinamas kriziniu. Kol kampas Θ mažesnis už krizinį, padidėjus mašinos apkrovai, didėja ir kampas Θ. Tuo pačiu padidėja mašinos aktyvioji galia, elektromagnetinis momentas, ir tai vyksta tol, kol momentai susilygina.
Kai kampas Θ didesnis už krizinį, padidėjus mašinos apkrovai, padidėja ir kampas Θ, bet mašinos aktyvioji galia sumažėja. Dėl to kampas Θ dar labiau padidėja, ir elektromagnetinės jėgos nebepajėgia išlaikyti sukibusių magnetinių laukų, ir mašina desinchronizuojasi.
Nominaliame režime kampas Θ = 20 - 300;
Mašinos perkrovos koeficientas λ = =MM
PPN N
max max ; λ ≅ 2-3;
Ryškiapolei mašinai būtų šiek tiek sudėtingiau (nes atsiras galios ir sukimo momento dedamoji proporcinga dvigubo kampo Θ sinusui).
Svarbu elektros mašinų kurse kalbėti apie sinchronines mašinas, nes visose elektrinėse veikia būtent sinchroniniai generatoriai. Tenka kartas nuo karto iš žiniasklaidos išgirsti, kas atsitinka, kai SG būna perkrautas, kai kampas Θ neleistinai padidėja, o apsauga nesuveikia, neatjungia generatoriaus nuo bendro tinklo. Tada perkrova persiduoda kitiems generatoriams, prasideda „griūtis“, lavininis apsaugų suveikimas, didžiuliai regionai, net šalys lieka be elektros kelioms dienoms. Tai tolygu tragedijai.
Sinchroninio generatoriaus “ V“ charakteristikos
Paprastai sinchroninėms mašinoms yra sudaromos inkaro srovės priklausomybės nuo žadinimo
srovės: Ia = f(Iž ), kai P=const.
Keičiant SG apkrovą P (keičiant generatoriaus pirminio variklio sukimo momentą), gaunama kreivių
šeima (P1<P2<P3). Priklausomai nuo aktyviosios galios gaunama šeima kreivių, kurios pagal formą vadinamos V charakteristikomis
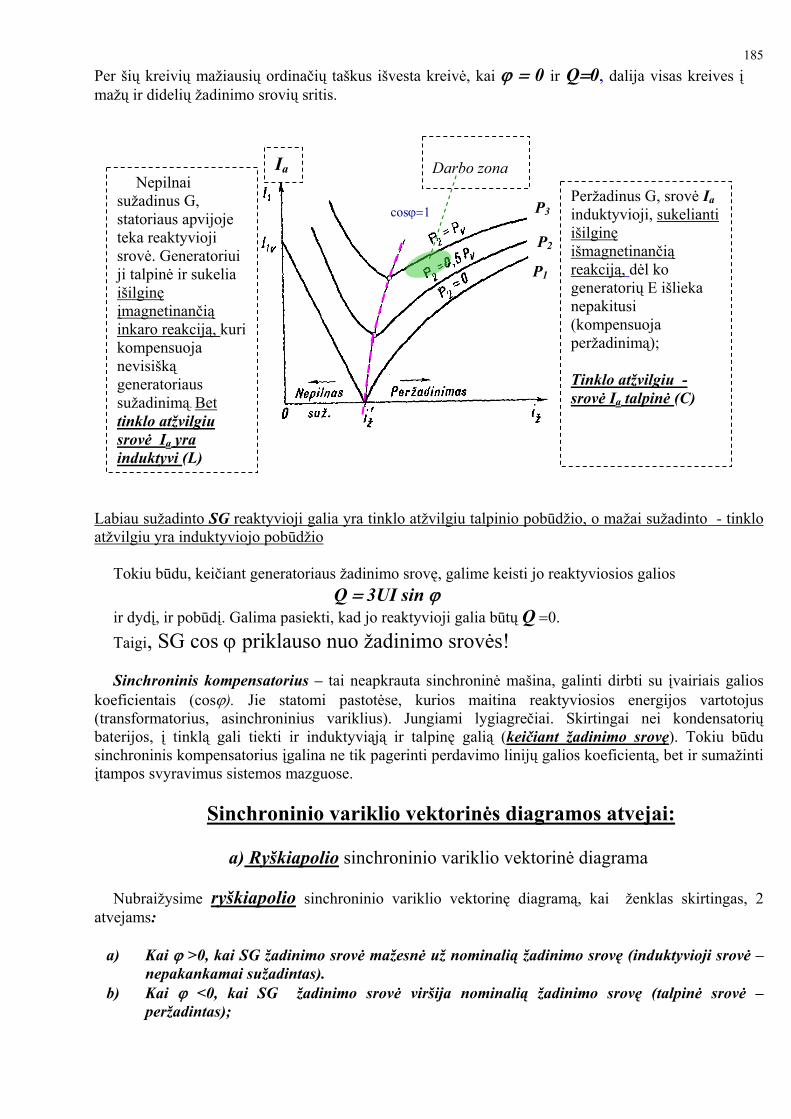
185Per šių kreivių mažiausių ordinačių taškus išvesta kreivė, kai ϕ = 0 ir Q=0, dalija visas kreives į mažų ir didelių žadinimo srovių sritis.
Labiau sužadinto SG reaktyvioji galia yra tinklo atžvilgiu talpinio pobūdžio, o mažai sužadinto - tinklo atžvilgiu yra induktyviojo pobūdžio
Tokiu būdu, keičiant generatoriaus žadinimo srovę, galime keisti jo reaktyviosios galios
Q = 3UI sin ϕ ir dydį, ir pobūdį. Galima pasiekti, kad jo reaktyvioji galia būtų Q =0. Taigi, SG cos ϕ priklauso nuo žadinimo srovės! Sinchroninis kompensatorius – tai neapkrauta sinchroninė mašina, galinti dirbti su įvairiais galios
koeficientais (cosϕ). Jie statomi pastotėse, kurios maitina reaktyviosios energijos vartotojus (transformatorius, asinchroninius variklius). Jungiami lygiagrečiai. Skirtingai nei kondensatorių baterijos, į tinklą gali tiekti ir induktyviąją ir talpinę galią (keičiant žadinimo srovę). Tokiu būdu sinchroninis kompensatorius įgalina ne tik pagerinti perdavimo linijų galios koeficientą, bet ir sumažinti įtampos svyravimus sistemos mazguose.
Sinchroninio variklio vektorinės diagramos atvejai:
a) Ryškiapolio sinchroninio variklio vektorinė diagrama
Nubraižysime ryškiapolio sinchroninio variklio vektorinę diagramą, kai ženklas skirtingas, 2
atvejams:
a) Kai ϕ >0, kai SG žadinimo srovė mažesnė už nominalią žadinimo srovę (induktyvioji srovė – nepakankamai sužadintas).
b) Kai ϕ <0, kai SG žadinimo srovė viršija nominalią žadinimo srovę (talpinė srovė – peržadintas);
cosϕ=1 P3
P2
P1
Peržadinus G, srovė Ia induktyvioji, sukelianti išilginę išmagnetinančią reakciją, dėl ko generatorių E išlieka nepakitusi (kompensuoja peržadinimą); Tinklo atžvilgiu - srovė Ia talpinė (C)
Nepilnai sužadinus G, statoriaus apvijoje teka reaktyvioji srovė. Generatoriui ji talpinė ir sukelia išilginę įmagnetinančią inkaro reakciją, kuri kompensuoja nevisišką generatoriaus sužadinimą. Bet tinklo atžvilgiu srovė Ia yra induktyvi (L)
Darbo zona Ia
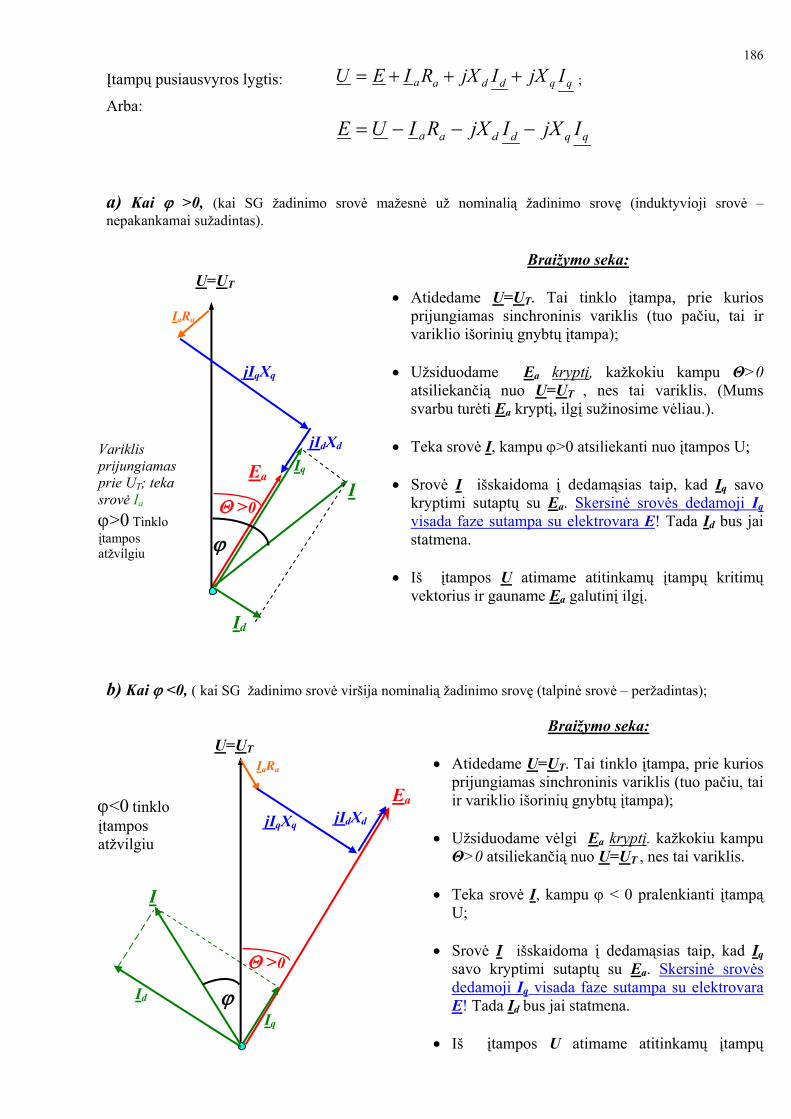
186
Įtampų pusiausvyros lygtis: qqddaa IjXIjXRIEU +++= ;
Arba:
qqddaa IjXIjXRIUE −−−=
a) Kai ϕ >0, (kai SG žadinimo srovė mažesnė už nominalią žadinimo srovę (induktyvioji srovė – nepakankamai sužadintas).
Braižymo seka:
Variklis prijungiamas prie UT; teka srovė Ia
ϕ>0 Tinklo įtampos atžvilgiu
I
U=UT • Atidedame U=UT. Tai tinklo įtampa, prie kurios
prijungiamas sinchroninis variklis (tuo pačiu, tai ir variklio išorinių gnybtų įtampa);
• Užsiduodame Ea kryptį, kažkokiu kampu Θ>0
atsiliekančią nuo U=UT , nes tai variklis. (Mums svarbu turėti Ea kryptį, ilgį sužinosime vėliau.).
• Teka srovė I, kampu ϕ>0 atsiliekanti nuo įtampos U; • Srovė I išskaidoma į dedamąsias taip, kad Iq savo
kryptimi sutaptų su Ea. Skersinė srovės dedamoji Iq visada faze sutampa su elektrovara E! Tada Id bus jai statmena.
• Iš įtampos U atimame atitinkamų įtampų kritimų
vektorius ir gauname Ea galutinį ilgį.
b) Kai ϕ <0, ( kai SG žadinimo srovė viršija nominalią žadinimo srovę (talpinė srovė – peržadintas);
Braižymo seka:
• Atidedame U=UT. Tai tinklo įtampa, prie kurios
prijungiamas sinchroninis variklis (tuo pačiu, tai ir variklio išorinių gnybtų įtampa);
• Užsiduodame vėlgi Ea kryptį. kažkokiu kampu Θ>0 atsiliekančią nuo U=UT , nes tai variklis.
• Teka srovė I, kampu ϕ < 0 pralenkianti įtampą
U; • Srovė I išskaidoma į dedamąsias taip, kad Iq
savo kryptimi sutaptų su Ea. Skersinė srovės dedamoji Iq visada faze sutampa su elektrovara E! Tada Id bus jai statmena.
• Iš įtampos U atimame atitinkamų įtampų
Θ >0
Ea Iq
Id
ϕ
IaRa
jIqXq
jIdXd
I
U=UT
Θ >0
Ea
Iq
Id ϕ
IaRa
jIjIqXq dXd ϕ<0 tinklo įtampos atžvilgiu

187kritimų vektorius ir gauname galutinį Ea ilgį.
Sinchroninio neryškiapolio variklio aktyvioji galia ir sukimo momentas.
“V” kreivės
Sinchroninio variklio inkaro apvijos supaprastinta atstojamoji schema. Čia vektorinė diagrama skirsis nuo sinchroninio generatoriaus vektorinės diagramos tik tuo, kad sinchroninio variklio atveju
srovės vektoriaus kryptis priešinga negu SG, E nukreipta prieš srovę. Pagal II Kirchhoffo dėsnį:
U= E +jXI ;
Kai tinklo įtampa pastovi, maksimalus variklio momentas priklauso tik nuo
elektrovaros E, t.y. nuo rotoriaus žadinimo srovės Iž
Čia UT = U = const.,
• “V” kreivėse punktyrinė linija atitinka maksimalų galios koeficientą.
• Kairėje nuo jos – žadinimo srovė mažesnė
už nominaliąją, o iš tinklo imama srovė – induktyvioji;
• Dešinėje – žadinimo srovė didesnė už
nominaliąją, o SV atiduoda į tinklą reaktyviąją galią. Tai nukrauna elektrinių generatorius nuo reaktyviosios galios gamybos, o perdavimo linijas ir tinklus – nuo reaktyviosios galios transportavimo (nuo reaktyvių srovių).
P1< P2 < P3
jX
I
E
U
V
Φž
Ef I
Θ Ψ
U=UT
ϕ
+jXI
+1
a c
b
Čia Θ >0
Ψ
+j
0

188
Sinchroninio variklio darbo charakteristikos
n=f/p=const
n
variklis generatorius
n0
-M
P2- variklio naudingoji galia M
Sukamasis momentas M P= 2
Ω ; ( Ω = 2π n ) tiesiog proporcingas naudingajai
galiai. Variklio naudojama aktyvioji galia P1 = P2 + ∑ ΔP ; Kur ΔP - galios nuostoliai. Didėjant P2, didėja ir nuostoliai, todėl P1 auga sparčiau negu P2. Sinchroninio variklio galios koeficientas mažėja, augant apkrovai.
Variklio inkaro srovė I PUa
a= 1
3 cosϕ auga sparčiau negu P1, nes cosϕ mažėja.
Sinchroninio variklio paleidimas
Sinchroninio variklio rotorius privalo suktis tuo pačiu greičiu kaip statoriaus magnetinis laukas.
Prijungus statoriaus apviją prie trifazio tinklo, sukamasis magnetinis laukas statoriuje atsiranda akimirksniu, o rotorius dėl didelės mechaninės inercijos negali pradėti suktis staiga.
Pralekiantys statoriaus magnetinio lauko poliai paeiliui tai atstumtų, tai pritrauktų rotoriaus magnetinius polius –to pasėkoje rotorius nesisuktų, o tik vibruotų.
Taigi, paleidžiant sinchroninį variklį, pradžioje rotorių reikia įsukti iki greičio, artimo ar lygaus sinchroniniam.
Įsukus sinchroninį variklį, reikia sinchronizuoti (kaip SG), ir tik po to inkaro apviją galima prijungti prie tinklo.
Tai –gana sudėtinga. Yra 2 sinchroninio variklio paleidimo būdai:
1. Įjungimas pagalbiniu varikliu ( analogiškas SG įjungimui lygiagrečiam darbui). Sinchroninis variklis turi būti visai neapkrautas, arba mažai apkrautas.
2. Asinchroninis įjungimas. (čia rotoriaus polių antgaliuose yra paleidimo apvija.)
Nesužadintas sinchroninis variklis prijungiamas prie trifazio tinklo.

189 Statoriaus sukamasis magnetinis laukas indukuoja rotoriaus paleidimo apvijoje elektrovarą, kuri
trumpai sujungtais paleidimo apvijos strypais priverčia tekėti sroves. Taip sukuriamas asinchroninis momentas, kuris ima sukti variklio rotorių.
Kai rotoriaus slydimas siekia apie 5 %, žadinimo apvija prijungiama prie maitinimo šaltinio, ir variklis pradeda dirbti kaip sinchroninis (priešingų ženklų magnetinės linijos “sukimba” ir toliau sukasi sichroniškai).
Specialios paskirties sinchroninės mašinos
• Reaktyvieji SV • Histereziniai varikliai • Švytuojamieji varikliai • Tiesiaeigiai varikliai • SM su nuolatiniais magnetais • Bekontaktės SM su elektromagnetiniu žadinimu • Reduktoriniai sinchroniniai varikliai • Žingsniniai SV • Ir t.t.
Apie tai bus kalbama I-jame magistrantūros - specialiųjų elektros mašinų kurse.