中央農業総合研究センターニュース · 中央農業総合研究センターニュース 研究情報 圃場のモニタリングと無線lan機能を持つ計測ロボット:

報告様式9
農業ハウスのIoT技術応用研究
~インターネット接続による農業ハウスの双方向性制御の研究~
1. 研究動機・目的
前年度の研究で、農業ハウスに搭載されたセン
サー、カメラを用いて農業ハウス内のデータを取
得し、インターネットを通じて、インターネット
接続が可能な端末――スマートフォンで農業ハウ
スの状態が確認できるモニタリングシステムの構
築し、その有効性を確かめた(図1)。
図1 モニタリングシステム画面
今年度は、逆にスマートフォンから農業ハウス
へデータを送信する機能。遠隔操作機能を追加で
きるシステムを構築しようと考えた。
2. 農業ハウスの調査
農業ハウスを遠隔操作するにあたって、農業ハ
ウスの調査を行った。
今回、遠隔操作しようと考えた機器、遮光カー
テン・谷換気、はどちらも200V動作の三相誘導電
動駆動機で動作していることが分かった。(図2)
図2 誘導電動駆動器
これが使用される理由としては、小型で高トル
クであるからだと考えた。動作用の機器が既にあ
り、これを用いて制御しようと考えた。
また、他の機器についても調査を行ったところ
(図3)、すべて200Vの交流で動作することが分
かった。
図3 他の機器
また、ハウスに用いられる電源についても調査
を進めた。ハウスの電源を確認したところ
R[赤]S[白]T[黒]C[緑]の四線が確認できた。
図4 各線の電圧
それぞれの線の電圧を測定してみた所(図 4)、
赤、白、黒、同士ならば200Vを出力するのに対し
て、緑を入れると違う結果になることが分かった。
このことから緑はアースではないかと考えた。
この結果から配線は異容量V結線三相四線式では
ないかと考えた(図5)。
図5 異容量V結線三相四線式
整理番号 SG150054
活動番号 A-001
ボイラー 光合成促進機

実際に農業ハウス近くの変電設備を確認してみ
た所、農業ハウスに繋がる変電設備に異容量V結
線三相四線式に用いるトランスを確認できた(図
6)ので、農業ハウスの電源は異容量V結線三相
四線式ではないかと判断した。
図6 確認した変電設備(〇がトランス)
3. インターフェースの構想
先ほどの調査から、ハウス内機器を動作させる
ためには、交流200Vを(ON)/(OFF)することが出
来るインターフェースがあれば良いと考え、製作
するためにインターフェースの構想を始めた。
図7 ラズベリーパイ
遠隔操作するための機器は制御が容易であるラ
ズベリーパイ(図7)を用いたいと考えていた。
しかし、ラズベリーパイを用いるのは、いくつか
問題点があるため、ここの仕様について考えなく
てはならなくなった。何故なら、ラズベリーパイ
で直接 200V を制御すると、ラズベリーパイの基
盤が焼けてしまう恐れがあり、また、ラズベリー
パイと200V機器の間にリレーを挟んだとしても、
リレーのコイルから発生するノイズがラズベリー
パイに悪影響を及ぼす危険があり、ラズベリーパ
イで 200V の電圧を制御するのはリスクが高いか
らと分かったからである。対応策としては、ノイ
ズ除去のためにフォトカプラを使う事であるが、
わざわざそのために基盤を作り出すのはコストが
高い。
そこで以下の様な構造を考えた。(図8)
図8 三層構造
インターネットから機器へ命令が届くまで、三
つの機器を重ねた三層構造になっている。
・ラズベリーパイでは、インターネットからくる
命令をシーケンサーへ伝える。また、シーケン
サーからくる情報をインターネットの向こう側
に居る人間へ伝える。
・シーケンサーでは、フォトカプラを内蔵してお
り、それを利用したノイズ除去によってシステ
ムの安定化をする。また、ラズベリーパイの信
号を保存する機能、日が変わったら保存をリセ
ットする機能がある。ラズベリーパイからくる
信号を適切にリレーへ伝える。リレーからの信
号をラズベリーパイへ伝える。
・リレーでは、ハウス内の 200V 機器の制御をす
る。シーケンサーからの信号を電動駆動へ伝え、
電動駆動が正常に動いていれば、シーケンサー
へ伝える。これにより、簡単に高圧電気を制御
出来ると考え、また、仕様が変更される場合で
も、リレー部分の設計、接線の変更をすれば、
簡単に対応できる柔軟性が高いシステムだと言
える。
また、インターネットが繋がらない場合を考え、
遠隔操作はコマンドを送信し保存して動作させる
仕組み、遠隔操作しない場合、自動制御に移る機
能を考えた。
遠隔操作をコマンドで行うことで、インターネ
ットが繋がらなくても遠隔操作命令は実行された
ままで済む。また、常に通信して遠隔操作する場
合と違って、通信量が少ないのでスマホの通信料
が少なく済む。遠隔操作しない場合、自動制御に
農業ハウスを任せることで、遠隔操作しなくても
ある程度は農業ハウスを維持することが出来る。

また、常に遠隔操作しなくても良くなり、放置し
てもある程度は大丈夫になる。ただし、ある程度
である。しかし、その程度が外れた場合でも、遠
隔操作で対応することが出来る。
遠隔操作にはタイマーと温度センサーを用いた
ものを使っている(図9)。
図9 自動化に用いている機器
今回、遠隔操作する、遮光カーテン・谷換気を
動作させる、三相誘導電動駆動機は以下の様に制
御する仕組みを考えた。(図10)
図10 三相誘導電動駆動機の制御図
リレーが動作しないときは、自動制御に。動作
しているときは、シーケンサーによって動作する。
開きたいときは、[開]と、コモンである[C]に繋
げる事で動作をし、逆に、閉じたいときは、[閉]
と[C]を繋げて動作。停止は何処も繋げないことで
停止させる。この仕組みは、遮光カーテンと谷換
気の制御に使った。
他にも、谷換気が開いているあいだは、CO2 を
無駄にしない様に、CO2 発生器の動作を停止でき
るように信号を送る機能を考えた。
また、何らかの理由で遠隔操作を遮断できるよ
うに、物理的に遠隔操作を遮断する機能が必要だ
と考えた。
以上の事を踏まえて、インターフェースを設計
した。設計図はインターフェースに設置する機器
の場所を記す機械的な設計図を書いてから、機器
に繋ぐ接線を記す電気的な設計図(図11)を書
いた。
図11 製作したインターフェースの接線表
4. インターフェースの製作
今後、修理することを考え、製作した線の長さ
CRB 遮光カーテンリモート制御/インターネット接続IFボックス
ケーブル名称 略称 長さ(cm) 接続先1 接続先2
外部系 遮光カーテン制御盤-開信号 SCC-開 CR CCB-R
(四芯) 遮光カーテン制御盤-閉信号 SCC-閉 CS CCB-S
遮光カーテン制御盤電源-R SCC-R C開 CCB-開遮光カーテン制御盤電源-S SCC-S C閉 CCB-閉
(四芯) タイマ-開信号 SCT-開 TR CTB-R
タイマ-閉信号 SCT-閉 TS CTB-S
タイマ電源-R SCT-R T開 CTB-開
タイマ電源-S SCT-S T閉 CTB-閉
谷換気系(x2) 谷換気PLC電源 TSE PLC-24VDC P24
(三芯) 谷換気西リモート切り替え TRE PLC-Y1 R1
谷換気東リモート切り替え TRW PLC-Y2 R2
(三芯) 谷換気PLC電源-G TSE-C PLC-COM0 G
谷リモート手動切り替え確認 TRK PLC-X13 TM谷換気リモートリレー状態確認 TRI PLC-X14 TR
(五芯) 西谷換気リモート-開 TER-K PLC-Y8 西41
西谷換気リモート-閉 TER-H PLC-Y9 西51東谷換気リモート-開 TWR-K PLC-Y10 東41東谷換気リモート-閉 TWR-H PLC-Y11 東51谷換気リモート-COM TR-C PLC-COM3 91
ラズパイ系 ラズパイ出力信号0 RS-0 RP0[出力] PLC-X0
(五芯) ラズパイ出力信号1 RS-1 RP1 PLC-X1
ラズパイ出力信号2 RS-2 RP2 PLC-X2
ラズパイ出力信号3 RS-3 RP3 PLC-X3ラズパイ出力信号_COM[他と共通] RN-C RP-COM1 PLC-COM0
(五芯) ラズパイ出力信号4 RS-4 RP4[出力] PLC-X4
ラズパイ出力信号5 RS-5 RP5 PLC-X5
ラズパイ出力信号6 RS-6 RP6 PLC-X6ラズパイ出力信号7 RS-7 RP7 PLC-X7ラズパイ出力信号_COM[他と共通] RN-C RP-COM2 PLC-COM0
(五芯) ラズパイ出力信号8 RS-8 RP8[出力] PLC-X10
ラズパイ出力信号9 RS-9 RP9 PLC-X11ラズパイ出力信号10 RS-10 RP10 PLC-X12ラズパイ出力信号11 RS-11 RP11 PLC-X13ラズパイ出力信号_COM[他と共通] RN-C RP-COM3 PLC-COM0
(五芯) ラズパイ入力信号0 RN-0 RP0[入力] PLC-Y14
ラズパイ入力信号1 RN-1 RP1 PLC-Y15ラズパイ入力信号2 RN-2 RP2 PLC-Y16ラズパイ入力信号3 RN-3 RP3 PLC-Y17ラズパイ入力信号_COM RS-C RP-COM PLC-COM4
電源系 タイマ電源供給-R TE-R CR TR
タイマ電源供給-S TE-S CS TS電源供給スイッチ EKS CR PSW-2シーケンサ電源供給-L SE-L CS PLC-Lシーケンサ電源供給-N SE-N PSW-1 PLC-Nコンセント電源供給-L CE-L CS CON-Lコンセント電源供給-N CE-N PSW-1 CON-N
リレー系 遮光カーテン操作盤_開制御 SKS-K C開 CRR-9
遮光カーテン操作盤_閉制御 SKS-H C閉 CRR-10遮光カーテン操作盤_COM SKS-C CC CRR-11タイマ_開制御 SKT-K T開 CRR-1タイマ_閉制御 SKT-H T閉 CRR-2タイマ_COM SKT-C TC CRR-3リモート_開制御 SKR-K PLC-Y4 CRR-5リモート_閉制御 SKR-H PLC-Y5 CRR-6
リモート_COM SKR-C PLC-COM2 CRR-7
リモート確認 RK PLC-X14 CRR-12リモート確認_COM RK-C PLC-COM0 CRR-8コイル SKC PLC-COM0 CRS-2コイル_COM SKC-C PLC-Y0 CRR-14コイル電源 SKC-E PLC-24 PLC-COM1
内部その他 リモート無効切り替えスイッチ RMK CRS-1 CRR-13
遮光カーテンR-COM SKT-RC1 CR CCタイマR-COM SKT-RC2 TR TC
リモート切り替え確認 RKK PLC-Y15 CRS-11リモート切り替え確認_COM RKK-C PLC-COM0 CRS-14
リレー動作コイル
リレー
開 閉 C
シーケンサー
自動制御装置
モータ駆動回路

を記録した。
線を作る際、ピッタリに配線すると、後に修正
する際、不便であると判断し若干の余裕を持たせ
て線の製作、配線を施した。
図12 ラズパイ・PLC・遮光カーテン制御リレー
内臓インターフェース
図13 谷換気制御リレー内臓インターフェース
また、シーケンサーのプログラムを製作した。
命令を一時保存する機能は学校の実習で学んだ
範囲でできたが、午後6時で命令を一旦、削除す
る機能の製作には苦労した。時間を指定する命令
の仕方が分からなかったので、調べる必要性があ
った。
5. インターフェースの取り付け・テ
スト
完成したインターフェースに対して何度かテス
トをして、設計と同じように出来ており、動作は
完璧であると判断し、実際に農業ハウスに取り付
けた。
取り付けて、実際に動作テストしてみたところ、
遮光カーテンは正常に動作する事が出来た。
しかし、谷換気に対しては、動作しなかった。
6. 考察・反省
遮光カーテンの動作に成功し、遮光カーテンの
調査結果と設計思想が正しかったと言える。
谷換気が動作しなかったことを踏まえ、考えて
いた方法で谷換気動作するのか、手動で線を繋げ
て確認したところ、考えていた方法では動作しな
いことが分かった。遮光カーテンと同じ動作方法
ではなかった。
遮光カーテンと同じように動作するだろうと主
観で判断してしまったのが悪かった。谷換気も動
作方法を調査するべきであった。
7. 今後の予定
不幸中の幸い、製作したインターフェースのリ
レー部分の改修を行うだけで谷換気は動作できそ
うなので、谷換気を動作させる構造を考えてリレ
ー部分を改修して農業ハウスに設置していきたい。
また、農業ハウスに設置し、運用した時、農業ハ
ウスにおける植物の生育に、どのような効果が現
れるのか研究していきたいと考えている。
8. まとめ
完全に完成とはならなかったが、低コストで農
業ハウスを遠隔操作する事が出来たという、IoT
の新しい可能性を示すことが出来た。この三層構
造のシステムは、高電圧機器の制御を、低価格で
直ぐに実装できるので、様々な場所に用いること
が出来ると考える。
また、農業ハウスの双方向性制御システムが完
成すれば、農家が農業ハウスに行かなくてもある
程度は管理が出来る。つまり、農家の働く時間が
減るので、その分、栽培管理する範囲を増やし、
栽培量を上げることができる。また、栽培状況は
常にモニタリングシステムによって収集されてい
る、そのデータからは作物の栽培周期のデータ、
また農家の歴代の感もデータに残っている。この
データを用いれば、後継者の育成に役立てること
ができ、またこのデータをビックデータとして用
いれば、AIによって栽培管理の補助、代理管理を
することが出来ると考えている。
以上の事から農業ハウスに双方管理システムを
用いると、農業の新しいスタイルを生み出すと考
えている。
9. 謝礼
学習の場を設けていただいた、諏訪東京理科大
学の松江教授をはじめ、信州大学農学部春日教授、
研究の場を貸していただいた「いちご園みつこ屋」
の神野様、顧問の石澤先生、塩沢先生にお礼を申
し上げます。
←ラズベリーパイ
←シンケーサー
↑遮光カーテン
制御リレー
←谷換気 制御リレー

10. 成果発表実績
2017.8 全国総文祭自然科学部門物理分野発表
(於:宮城専修大)
2017.9 日本植物学会高校生ポスター発表
(於:東京理科大・野田キャンパス)
2017.12 信州サイエンスキャンプ・全国総文県予選
(於:諏訪東京理科大)
2017.12 信州アプリコンテストZERO
Yahoo!JAPAN賞受賞(於:長野市芸術館)
2017.12 産業教育MIRAIフェア ポスター発表
(於:県総合教育センター)
2018.1 全国ものづくり高大連携発表会展示発表
(於:駒ヶ根市アイパル)
2018.2 長野県産業教育振興会上伊那支部研修会
生徒研究発表(於:南箕輪村)
2018.3 信州サイエンスミーティングポスターセッション
(於:信州大学理学部)
2018.8 全国総文祭自然学部部門発表予定
(於:諏訪東京理科大学)
11. 大学等研究者(講師)の指導の状況
信州大学農学部 教授 春日重光 氏
システムの機能設定検討段階
・ハウス栽培方法と管理のポイント指導
いちご園みつこ屋(神野いちご園)神野幸洋
システムの機能設定段階・運用評価改善段階
・栽培方法と指導と栽培管理に必要なシステム
機能仕様作成
・開発システムの試験運用と評価・改良提案
諏訪東京理科大学工学部 教授 松江英明 氏
システム開発・研究計画作成段階
・無線ネットワークの基本特性と機能指導
・研究全体計画の作成、連携分担の策定指導
研究実施段階
・研究状況の確認・評価
・研究方向の修正等の指導助言
研究まとめ段階
・まとめの方向性と内容項目の選定指導
・継続研究テーマの設定について
諏訪東京理科大学経営情報学部 講師 山口一弘 氏
研究計画作成段階
・実現可能性の評価と必要知識の提示・指導
研究段階
・技術指導と実現方法への助言
・端末装置の回路設計指導
・機器の動作確認と改良指導
研究まとめ段階
・技術的要素の確認と裏付け指導
報告様式 9
高精度干渉計型電波望遠鏡の制作
~干渉計型電波望遠鏡制作に向けて~
1.研究動機と目的
私たちの同好会は、単一型電波望遠鏡を用いた
太陽電波の観測・研究を行ってきた。
これまでに、太陽フレアの観測など様々な成果
を得られてきた。しかし、問題点や調整しなけれ
ばならない点も存在している。
解決するにはより高精度で制御しやすい観測シ
ステムや駆動システムを構築する必要があるので、
私たちは干渉型電波望遠鏡の開発とそのために必
要な新たな単一型電波望遠鏡と、それを用いた干
渉型電波望遠鏡の開発と研究をすることにした。
2.研究内容
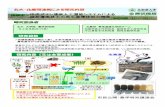
(1)現在の単一型電波望遠鏡での成果
現在我々は太陽電波の観測太陽電波望遠鏡を用
いて観測を行っている。下の図は、観測に成功し
た電波変動のグラフである。
<上:2015/3/15 23:36 ~ (UST)>
<中:2015/3/15 3:20 ~ (UST)>
<下:2014/12/20 00:24 ~ (UST)>
(2)2017 年9月の太陽フレア観測について
日本時間で今年の9月6日に 11 年ぶりの、最
強クラスである X9.3 レベルの大規模フレアが発
生した。本校でもそのフレアの観測を行った。下
のグラフは太陽フレアによる電波変動のデータで
ある。残念ながら、我々の使っている単一型電波
望遠鏡では観測することはできなかった。我々の
単一型電波望遠鏡ではデータはとれたものの、フ
レアと思われる変動は観測できておらず、グラフ
の作成ができなかったので、フレアを観測できな
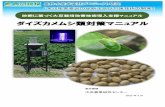
かった理由を探すため、我々の観測データと国立
天文台野辺山観測所観測データを比較した。野辺
山観測所の 17Ghz・34Ghz 干渉計では、太陽フレア
による電波変動を観測できていた。しかし、17Ghz
干渉計の観測データにはノイズらしきものが入っ
ており、それに対して 34Ghz 干渉計の観測データ
には 17Ghz 干渉計で発生していたノイズが無くな
っており、鮮明な観測ができていた。
我々が観測に用いているのは 4Ghz 帯単一型電
波望遠鏡である。そして、34Ghz 干渉計でやっと
ノイズのない鮮明な観測を行えていたことから、
我々が使用している 4Ghz 帯単一型電波望遠鏡で
は今回のフレアは観測することはできないのでは
ないかという結論に至った。
<野辺山観測所データ>
3.結果・考察
(1)観測グラフから
これはある観測データから出した、追尾制御時
のローテータモータ起動ノイズとアンテナブーム
の慣性によるがたつきが表れているのをまとめた
グラフである。
整理番号 SG150054
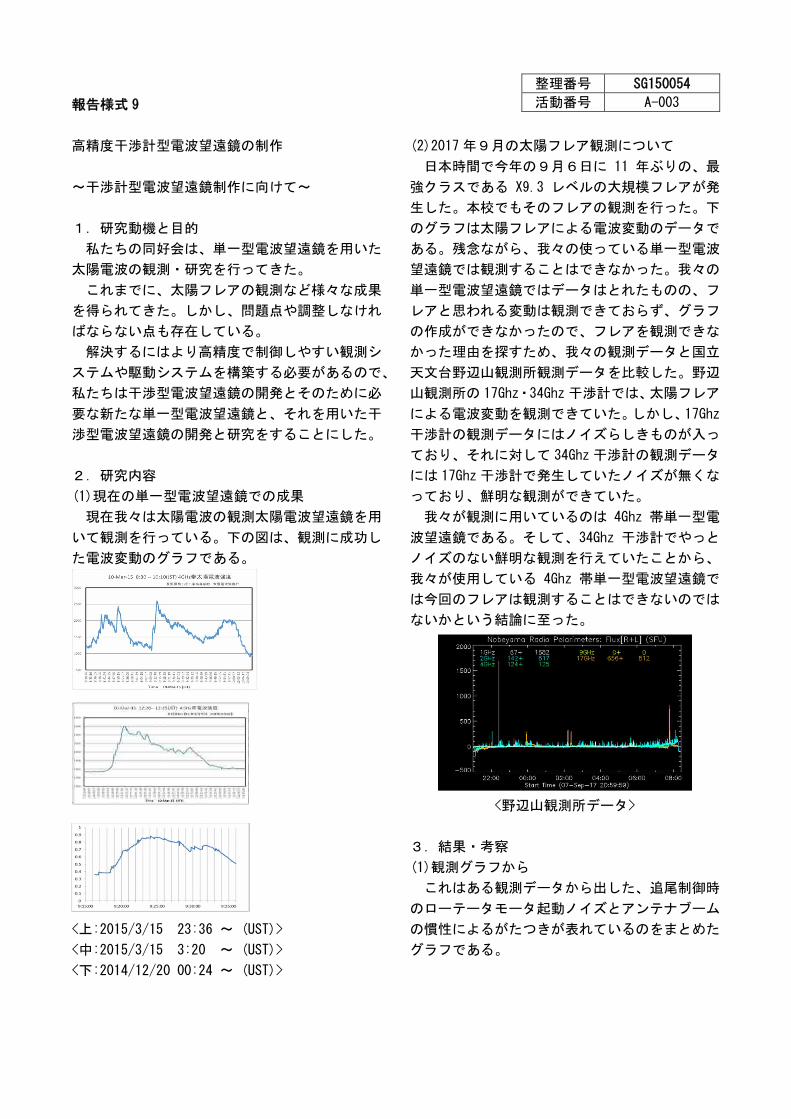
活動番号 A-003
グラフから観測時に毎秒±1[mv]ほどの小さな
変動が発生していることが分かった。この変動は、
長年の使用による不調によるものだと判断した。
調子の悪いまま観測しても、満足に観測を行えな
いかもしれないので、これから先も太陽電波の高
精度な観測を行えるようにするために、新たに単
一型電波望遠鏡の開発をしている。
(2)新たな単一型電波望遠鏡の開発
現在使用している単一型電波望遠鏡からの変更
点として。アンテナ追尾の駆動システムの変更を
した。アンテナ追尾の駆動システムにウォームギ
アとステッピングモーターを用いることで、現在
使っている単一型電波望遠鏡よりも正確な制御や、
より高精度な観測行うことをを実現できる。また、
新しい単一型電波望遠鏡で精度のよい観測を行え
るようになれば、干渉型電波望遠鏡として運用す
ることもでき、太陽電波観測の幅をさらに広げる
ことができる。
<開発中の新単一型電波望遠鏡筐体>
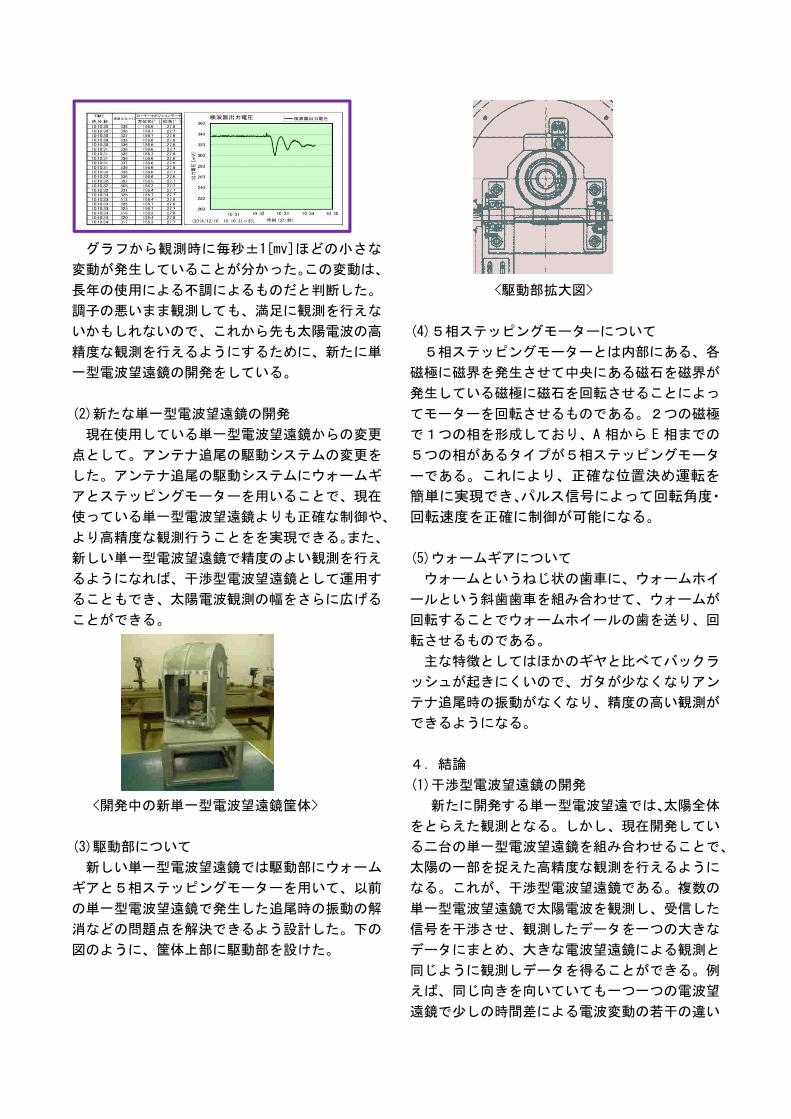
(3)駆動部について
新しい単一型電波望遠鏡では駆動部にウォーム
ギアと5相ステッピングモーターを用いて、以前
の単一型電波望遠鏡で発生した追尾時の振動の解
消などの問題点を解決できるよう設計した。下の
図のように、筐体上部に駆動部を設けた。
<駆動部拡大図>
(4)5相ステッピングモーターについて
5相ステッピングモーターとは内部にある、各
磁極に磁界を発生させて中央にある磁石を磁界が
発生している磁極に磁石を回転させることによっ
てモーターを回転させるものである。2つの磁極
で1つの相を形成しており、A 相から E 相までの
5つの相があるタイプが5相ステッピングモータ
ーである。これにより、正確な位置決め運転を
簡単に実現でき、パルス信号によって回転角度・
回転速度を正確に制御が可能になる。
(5)ウォームギアについて
ウォームというねじ状の歯車に、ウォームホイ
ールという斜歯歯車を組み合わせて、ウォームが
回転することでウォームホイールの歯を送り、回
転させるものである。
主な特徴としてはほかのギヤと比べてバックラ
ッシュが起きにくいので、ガタが少なくなりアン
テナ追尾時の振動がなくなり、精度の高い観測が
できるようになる。
4.結論
(1)干渉型電波望遠鏡の開発
新たに開発する単一型電波望遠では、太陽全体
をとらえた観測となる。しかし、現在開発してい
る二台の単一型電波望遠鏡を組み合わせることで、
太陽の一部を捉えた高精度な観測を行えるように
なる。これが、干渉型電波望遠鏡である。複数の
単一型電波望遠鏡で太陽電波を観測し、受信した
信号を干渉させ、観測したデータを一つの大きな
データにまとめ、大きな電波望遠鏡による観測と
同じように観測しデータを得ることができる。例
えば、同じ向きを向いていても一つ一つの電波望
遠鏡で少しの時間差による電波変動の若干の違い
を見ることもできたり、広範囲にわたる観測を行
うことができたりするようになり、観測の範囲を
広げることができる。
(2)今後への課題
新たな単一型電波望遠鏡は着実に完成に近づい
ており、完成に伴い、追尾時の微小な振動のない
駆動システムや、精度のよい太陽電波観測をする
ための機材の開発も実現することができた。
今後は、完成までに観測システムや観測データ
の自動保存を行うためのシステムを構築し、完成
した設備で実際に太陽電波の観測を行い、干渉型
電波望遠鏡での観測も行っていく予定である。
5. 謝辞
今年の研究を進めるに当たり、野辺山太陽電波
観測所の篠原さんと研究員の皆様、株式会社赤坂
鐵工所様、焼津天文科学館の学芸員の皆さん、地
元企業の株式会社ヤマウラ様、株式会社ヨウホク
様、株式会社宮脇製作所様には、電波望遠鏡の開
発にも携わって頂きました。また、本研究の指導
者である石澤先生、塩澤先生には、研修の引率や、
わからないところのアドバイスなどしていただき、
大変お世話になりました。
6. 参考文献等
ttp://www.tristate.ne.jp/picnic.htm
C-NIC について
7. 成果発表実績
2017.12 信州サイエンスキャンプ・全国総文県予選
(於:諏訪東京理科大)
2018.1 全国ものづくり高大連携発表会展示発表
(於:駒ヶ根市アイパル)
2018.3 信州サイエンスミーティングポスターセッション
(於:信州大学理学部)
2018.3 日本天文学会ジュニアセッション
口頭発表・ポスターセッション
(於:千葉大学西千葉キャンパス)
8. 大学等研究者(講師)の指導の状況
○国立天文台野辺山宇宙電波観測所
研究技師 御子柴 廣 氏
研究計画段階
・電波天文学解説・研究テーマ情報提供
・電波天文学全般指導
○国立天文台野辺山宇宙電波観測所
特任専門員 衣笠 健三 氏
研究計画・初期段階
・日本の宇宙電波観測の状況説明・指導
・電波望遠鏡の仕組み
○国立天文台野辺山宇宙電波観測所
技師 篠原 徳之 氏
研究計画段階
・計画立案指導・テーマ設定助言
実施段階
・技術指導
・基本設計助言指導
・組立製作指導
・観測データ解析指導
・観測所観測データの取得方法指導
研究まとめの段階
・結果データの評価指導
・次期研究テーマの設定と継続研究の方向指導
○焼津天文科学館 学芸員 松永 歩 氏
実施段階
・焼津天文台での天体観測指導
・反射型光学望遠鏡の構造・製造方法指導
(株)赤阪鐵工所 開発設計チーム 主任 市川伸洋 氏
研究実施段階
・駆動部機構の基本設計
・組立時の技術指導
(株)赤阪鐵工所プラント営業チーム リーダー 森川洋行 氏
研究実施段階
・組立作業の準備・基本技術指導
・必要の部品の一部提供
(株)ヤマウラ エンジアリング事業部長 山下 良一 氏
研究段階
・筐体・シャフト部の加工製造技術指導
・シャフト部品等の製造・提供
(株)ヨウホク 代表 北林 友和 氏
研究実施段階
・筐体蓋等板材加工品の製造技術指導
・組立前板材部品の加工の技術指導
・板材関係部品の製造・提供
(株)宮脇製作所 代表 宮脇 眞 氏
・板材部費・パキン等の製造技術等指導
・パッキン部品利用方法指導
・板材・パッキン部品の製造・提供

報告様式 9
花芽分化制御のための低コスト環境制御
の効果について
1. 動機及び目的
先行研究として遮光処理とミスト処理を使った促
成栽培を行った。今年度は、山上げ栽培を行い、その
データと今年の処理区、未処理区のデータを比較しど
の程度の差が生じるのかを検証する。
2.基礎知識
1) 栽培についてイチゴの栽培方法には普通栽培と促
成栽培がある。普通栽培とは、温室など特別な施
設を使用しない露地で栽培する方法です。促成栽
培は、ハウス内で、人の手を加えることにより休
暇をさせないことで、収穫時期を早くする栽培で
す。
図1 露地栽培のスケジュール
図1は、普通栽培のイチゴのスケジュールです。収
穫がイチゴの旬である4月から6月に収穫時期が重
なっていることがわかります。
図2 促成育成のスケジュール
図2は、ビニールハウスを利用した栽培方法の中で
は、最もオーソドックスな栽培方法で親株から発生し
た子株をポットに移し、9月中旬に花芽分化する。
先行研究では、普通ポット育苗で大型の施設を必要
としなく、ミスト冷却を使用することにより、コスト
を抑えて育成ができるかを検証した。
3.方法
1)遮光処理とミスト処理
先行研究を行い以下が花芽分化のスケジュール
です。
6月中旬 子苗(ランナー)発生
7月上旬 挿し苗
8月上旬 活着確認・追肥開始
8月 20 日 日長が短くなり始めるので促進処理を開
始。促進処理は、肥料を断ち切り、温度
を低下させること。
約 30 本を露地設置、残りをハウス内に。ハウス内の
ものには、促進処理を加える、遮光処理とミスト冷却
による温度低下を行う。
ミスト冷却については雨天曇天を除いた 9~16時の
間に 4~5 分の間隔で 4~5 秒ミストを噴射させます。
葉に水滴が残ると病気になってしまうため、天候に合
わせ葉に水滴が残らない程度にミストを噴射する。
今年度の研究では、昨年度の研究で行ったミスト処
理と遮光処理の処理区と未処理区のデータと山上げ
のデータ、この3つのグループでどの程度の差が生ま
れるのかを確認する。その3つの管理方法は以下のと
おりです
① 露地栽培(対照区)
駒ケ根市内 神野さんのイチゴハウス
標高 約 648m
1日1回の水やり、遮光およびミスと処理を行って
いない
② 促成栽培(処理区)
場所と標高は①と同じ
ミスト処理、遮光処理
※ミストは日の出一時間後から日の入りに2時間前
まで4~5分間隔で1回5秒程度、雨天時は休止
③ 山上げ(八ヶ岳農場)
八ヶ岳中央農業実践大学校実習農地の一部
標高 約 1257m
①、②より約 600m 標高が高いので 3.6°低い場所
で促成栽培をしている
4.結果
1)促成栽培による促進効果
図 3 昨年度のミスト冷却のデータ
ミスト冷却の効果は、ミスト動作用の電磁弁の駆動
整理番号 SG150054
活動番号 A-005

信号、外気温度、ハウス内の3か所の温度を取り込み、
検証した。図5は 2016年のモニタリングデータです。
一番上から、ミスト動作用の電磁弁の駆動信号、その
下が外気温度、下3本がハウス内の3か所の温度変化
です。この測定結果からミスト冷却の後のハウス内の
温度は下がり、その後徐々に上がる変化が繰り返して
いることが分かりました。このことから、ハウス内の
温度を2~3度下げることに成功した。
2)花芽分化観察結果
表 1 花芽分化状態記録 2016
表 1 の結果より、処理区と対照区の比較を行うため
処理区から3株、対照区から2株を観察したところ、
処理区のすべての株に十分な花芽の膨らみがあるの
に対して、対照区の株は花芽の発生が確認できる程度
であったので、9/13 で促進処理を終了し、定植の準備
をして、9/15 に定植した。
3)開花調査結果
表2 出蕾比較
表3 開花比較
開花調査結果は、出蕾率 50%で見ると、処理区が
10/21、対照区が 10/27 と 6 日間の差があり、開花率
50%で見ると、処理区が 11/4、対照区が 11/9 と 5 日
間の差が見られました。
4)山上げ結果と処理区、未処理区との比較
図 4 今年度のミスト冷却のデータ
表 4 花芽分化状態記録 2017
表 5 分化期間内の気温状況
図 4は今年のミスト冷却のデータです。表 4 は3つの
比較対象の分化状態の記録です。表 5 の通り今年は去
年に比べて気温が低かったため、ミスト冷却を行うほ
どの気温ではなかったと言える。昨年の記録では、気
温が高く、ミスト冷却が行われるような場合にはしっ
かりと効果が確認できた。この3つのデータを比較す
ると山上げの気温が約2~3℃程度低いことが分か
り、山上げは促成栽培に適していることが分かりまし
た。
5.結論
今年はミスト処理を行わなくてもいい気象状況だ
ったが、昨年は日が出ており気温が高かったため、ミ
スト処理が盛んに行われていた。今年と昨年の気象状
況に差はあるが、規定日までには花芽分化が行われて
いた。標高が高い場所での促成栽培はより効果が見ら
れた。
6.課題
今回の研究では日長と気温を制御した花芽分化と
山上げ・促成栽培の比較検証を行いました。促成栽培
には様々な方法があることを調べていくうちに知り
ました。例えば、ナノバブル水を飽和させ活性酸素を
発生させ、それを植物に与え促成させる方法などがあ
ります。この例を含めた様々な促成栽培の研究を行い、
どのような気象状況でも花芽分化を行えるような手
法を研究していきたいです。
8.謝辞
今回、共同研究として協力していただいた信州大学
農学部の春日重光教授、諏訪東京理科大学の松江英明
教授、八ヶ岳中央農業実践大学校様、ハウスを提供し
てくださった神野幸洋様、私達の研究に協力していた
だいたことに感謝申し上げます。
9.成果発表実績
2017.9 日本植物学会高校生ポスター発表
(於:東京理科大・野田キャンパス)
2017.12 信州サイエンスキャンプ・全国総文県予選
(於:諏訪東京理科大)
2017.12 産業教育 MIRAI フェア ポスター発表
(於:県総合教育センター)
2018.1 全国ものづくり高大連携発表会展示発表
(於:駒ヶ根市アイパル)
2018.2 長野県産業教育振興会上伊那支部研修会
生徒研究発表(於:南箕輪村)
2018.3 信州サイエンスミーティングポスターセッション
(於:信州大学理学部)
10. 大学等研究者(講師)の指導の状況
信州大学農学部 教授 春日 重光 氏
研究計画・準備段階
・いちご促成栽培技術と促進処理指導
・栽培管理・生育研究におけるデータ化について
研究段階
・分化促進段階におけるデータ評価と補足データ収
集に関する助言・指導
いちご園みつこ屋(神野いちご園) 神野 幸洋 氏
研究開始段階
・花芽分化促進処理の方法と技術指導
・促進処理に必要な管理設備の機能について
・促進処理評価に向けた必要データ項目の設定
研究段階Ⅰ(花芽促進処理段階)
・実験に必要な苗の提供
・通常の栽培管理と状況記録
・花芽検定の技術指導と結果の評価
研究段階Ⅱ(育成・収穫期段階)
・定植指導と栽培管理
・生育状況管理・記録の指導・補助
研究まとめ段階
・結果の評価・考察に関する助言
諏訪東京理科大学工学部 教授 松江 英明 氏
研究実施段階
・栽培圃場の環境計測の指導
・八ヶ岳圃場の環境記録データの提供
・研究関連データの測定・収集方法等の指導助言
研究まとめ段階
・結果データのまとめ方と評価指導
八ヶ岳中央農業実践大学校
教務課長・教官 奥 久司 氏
研究実施段階
・実験苗の通常管理と検体採取
・実験苗の生育状況記録と連絡
研究まとめ段階
・研究結果の評価
・継続研究の方向性指導と情報提供

報告様式9
太陽活動の太陽光発電への影響と信州における
高効率設置に関する研究
1. 研究動機・目標
登校中に多くの太陽光発電施設を目にするように
なったが、その設置角度に違いがあり、ベストな設
置角は何度なのか疑問を持った。また、本校には太
陽が発する4GHz 帯の電波を観測する太陽電波望遠
鏡(図1)があり、太陽活動について研究を行ってき
ている。この電波望遠鏡の太陽追尾機能を利用すれ
ば、常時太陽方向にパネルを向けた発電についてデ
ータをとることができ、これと比較検討することで、
最適設置について研究することが可能であると考え
た。また、太陽観測と同じタイミングで、データを収
集すれば、太陽活動によって、太陽光発電がどのよ
うな影響を受けるのではないかと考えた。
図1:4GHz帯太陽電波望遠鏡
2. 研究の基礎知識
(1) 太陽光セルの出力特性について
太陽光セルは、シリコンのpn接合面に光を当て
ると接合面に N 型側に電子(-)、P 型側に正孔(+)が
集まるという性質を利用している。
図2:太陽光モジュールの等価回路
(SHARP社製品規格表より引用)
このセルを数段直列に接続したものが太陽光モジ
ュールでその等価回路を図2に示す。この回路に示
すようにモジュールは、受光した太陽光の量に対応
した定電流を発生する。外部に負荷装置を接続して
この電流を取り出して利用することになる。接続す
る負荷の抵抗値を上げていくと端子電圧も上がって
いき、取り出せる電力量も上がっていくが、内部に
あるダイオード性の性質により一定の電圧(順方向
電圧降下)を超えるとモジュール内部に電流が流れ
て、外部には電流が取り出せなくなる。横軸に端子
電圧、縦軸に取り出せた電力をとって、この様子を
グラフ化したものが、出力特性である。その例が後
述のグラフ1である。
3.ソーラーパネルの製作
(1)使用モジュールの決定
図3:太陽電波望遠鏡先端部形状
図3は本校にある太陽電波望遠鏡の先端部分の形
状である。この部分にソーラーモジュールを設置す
ることとし、取り付け可能サイズのソーラーモジュ
ールの中から、特性が公開されている SHRAP 製の
LR0GC02 を使用することにした。このソーラーモジ
ュールは、現在最も広く使われている多結晶シリコ
ン型のソーラーセルが使われている。図 4 は、
LR0GC02の形状で、外形寸法は、縦41mm、横67.5mm
である。
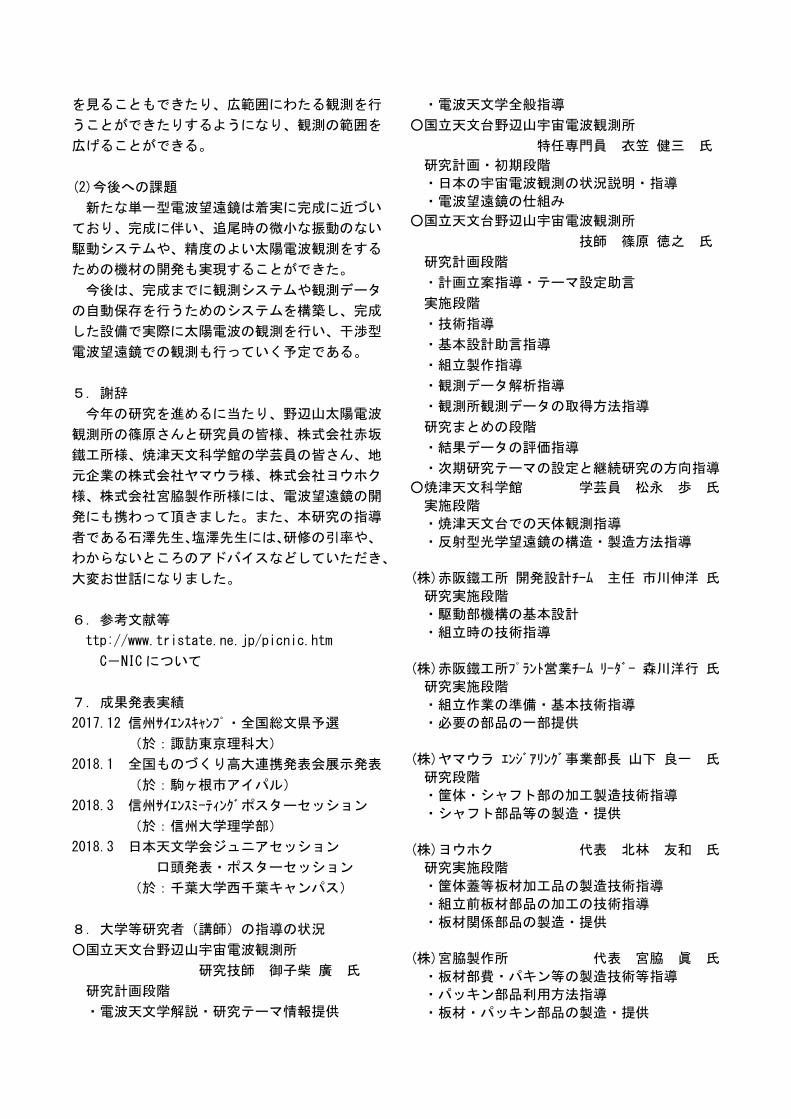
グラフ1は、メーカー公表の出力特性である。端
子電圧の増加に伴い、直線的に出力電力が増えてい
き、電圧が4.5V以上になると急激に下がっていく。
整理番号 SG150054
活動番号 A-007
先端部サイス ゙縦70.0mm 横72.0mm
これが出力特性である。
出力電力が0Wになった時の電圧が6Vで、出力電力
の大きさに関係なく、
図4:SHRAP社のLR0GC02
グラフ1:メーカーの出力特性グラフ
項目 内容
最大出力電力 TYP. 300 mW
最大出力電圧 TYP. 4.5 V
最大出力電流 TYP. 67 mA
外形寸法 67.5×41.0×0.8 mm
表1:LR0GC02の定格
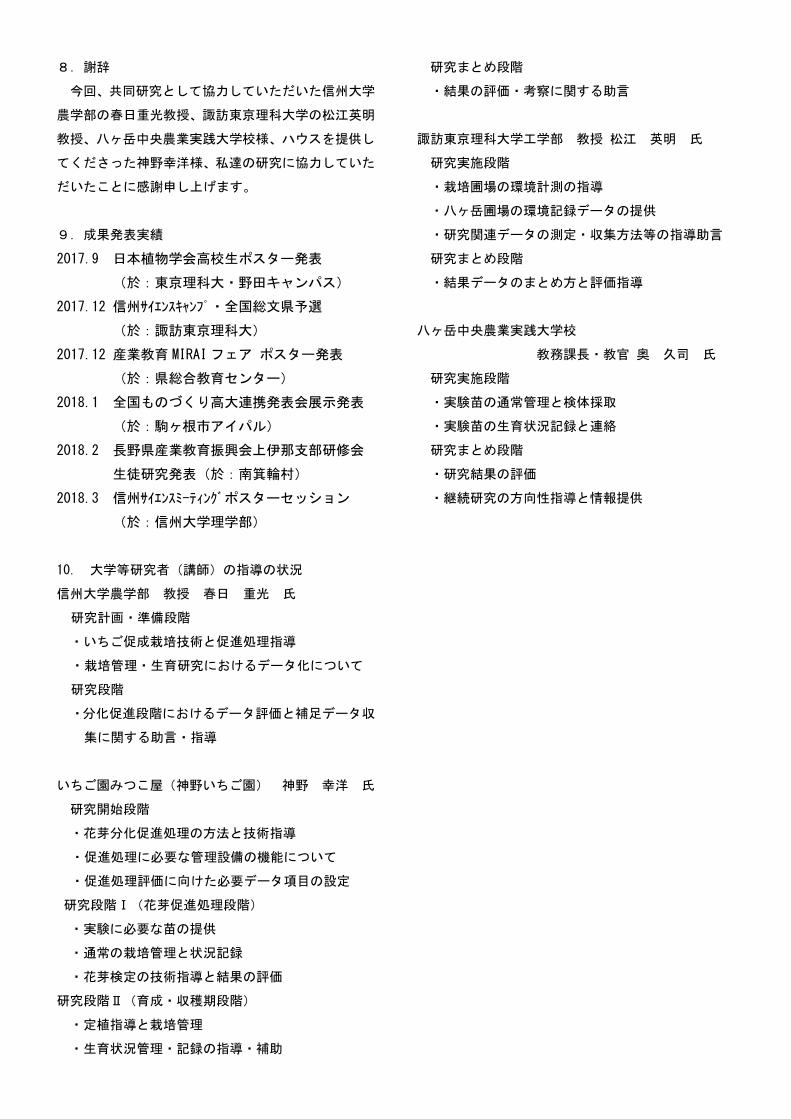
(3)特性測定
メーカー発表と同様の特性が得られるか調べるた
め、太陽光モジュールを日光に向け出力特性を調査
した。太陽光モジュールと可変抵抗を繋げ、電圧計
を並列に、電流計を直列に繋いだ。可変抵抗の値を
変えていき、出力された電力を調べてグラフにした。
図5:測定に使用した回路図
グラフ2:受光量による出力の変化
グラフ 2 は、横軸を端子電圧、縦軸を出力電力で
示した。グラフ 2 に示すように、出力電力が最大出
力点まで直線的に増えていくが、4.5V以降の出力電
力が低下しており、グラフ 1 の本製品の特性グラフ
と一致していることが分かった。
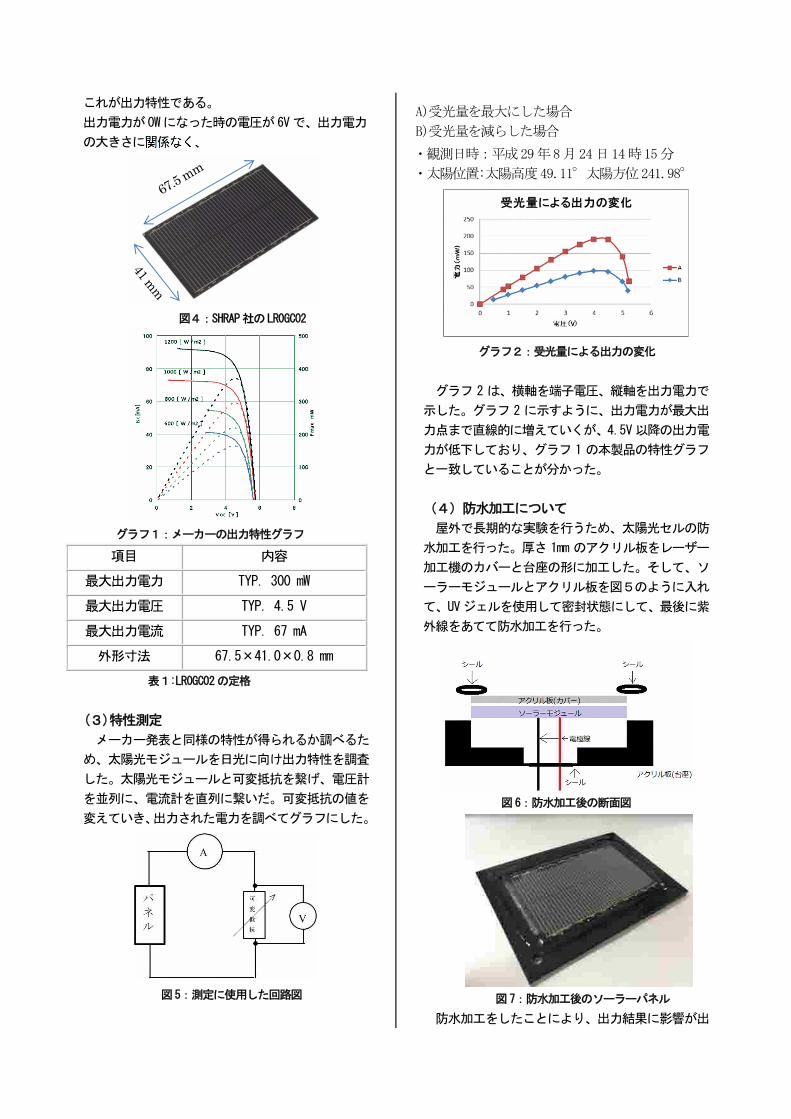
(4)防水加工について
屋外で長期的な実験を行うため、太陽光セルの防
水加工を行った。厚さ 1mm のアクリル板をレーザー
加工機のカバーと台座の形に加工した。そして、ソ
ーラーモジュールとアクリル板を図5のように入れ
て、UVジェルを使用して密封状態にして、最後に紫
外線をあてて防水加工を行った。
図6:防水加工後の断面図
図7:防水加工後のソーラーパネル
防水加工をしたことにより、出力結果に影響が出
・観測日時:平成29年8月24日14時15分
・太陽位置:太陽高度49.11°太陽方位241.98°
A)受光量を最大にした場合
B)受光量を減らした場合
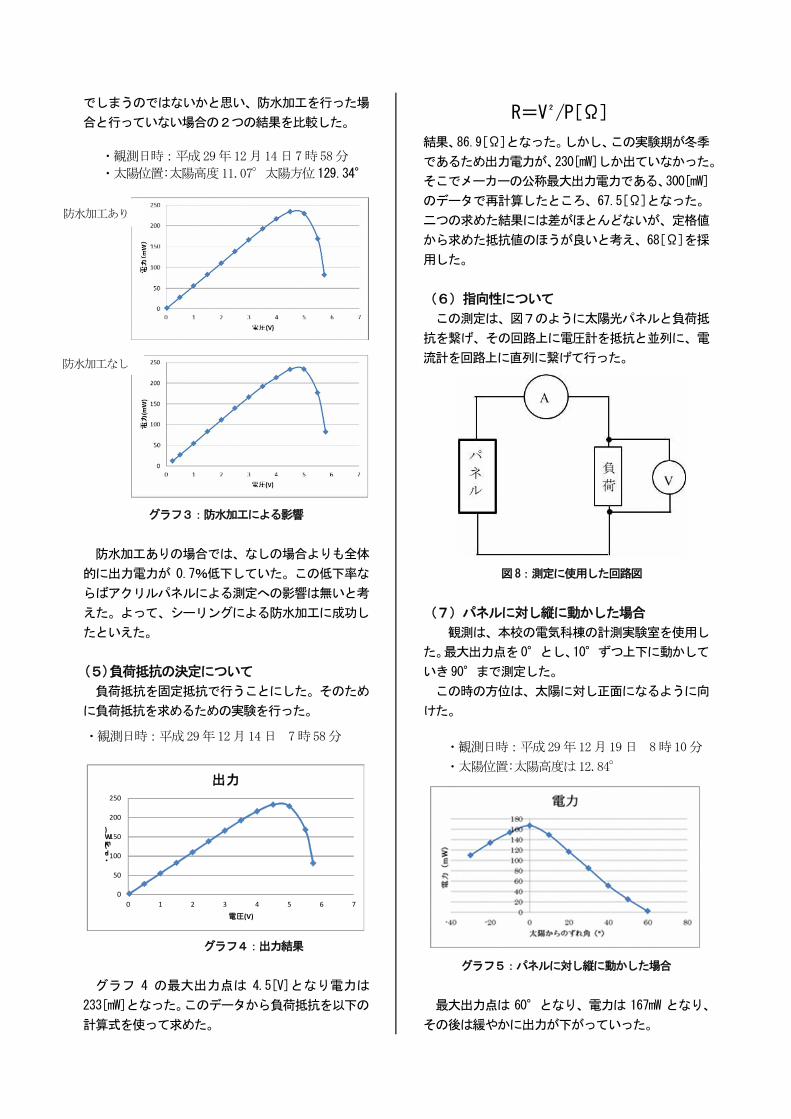
でしまうのではないかと思い、防水加工を行った場
合と行っていない場合の2つの結果を比較した。
グラフ3:防水加工による影響
防水加工ありの場合では、なしの場合よりも全体
的に出力電力が 0.7%低下していた。この低下率な
らばアクリルパネルによる測定への影響は無いと考
えた。よって、シーリングによる防水加工に成功し
たといえた。
(5)負荷抵抗の決定について
負荷抵抗を固定抵抗で行うことにした。そのため
に負荷抵抗を求めるための実験を行った。
グラフ4:出力結果
グラフ 4 の最大出力点は 4.5[V]となり電力は
233[mW]となった。このデータから負荷抵抗を以下の
計算式を使って求めた。
R=V²/P[Ω]
結果、86.9[Ω]となった。しかし、この実験期が冬季
であるため出力電力が、230[mW]しか出ていなかった。
そこでメーカーの公称最大出力電力である、300[mW]
のデータで再計算したところ、67.5[Ω]となった。
二つの求めた結果には差がほとんどないが、定格値
から求めた抵抗値のほうが良いと考え、68[Ω]を採
用した。
(6)指向性について
この測定は、図7のように太陽光パネルと負荷抵
抗を繋げ、その回路上に電圧計を抵抗と並列に、電
流計を回路上に直列に繋げて行った。
図8:測定に使用した回路図
(7)パネルに対し縦に動かした場合
観測は、本校の電気科棟の計測実験室を使用し
た。最大出力点を0°とし、10°ずつ上下に動かして
いき90°まで測定した。
この時の方位は、太陽に対し正面になるように向
けた。
グラフ5:パネルに対し縦に動かした場合
最大出力点は 60°となり、電力は 167mW となり、
その後は緩やかに出力が下がっていった。
0
50
100
150
200
250
0 1 2 3 4 5 6 7
・d・ヘ(mW)
電圧(V)
出力
防水加工あり
防水加工なし
・観測日時:平成29年12月14日7時58分
・太陽位置:太陽高度11.07°太陽方位 129.34°
・観測日時:平成29年12月14日 7時58分 ・観測日時:平成29年12月19日 8時10分
・太陽位置:太陽高度は12.84°
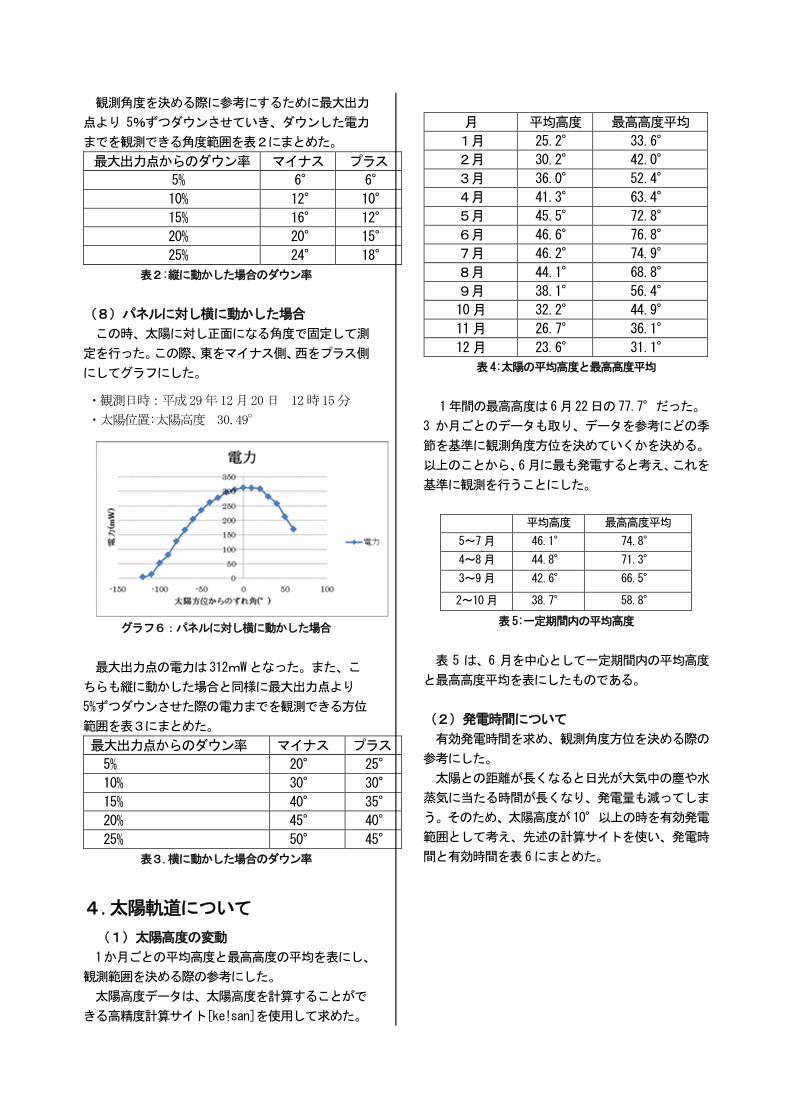
観測角度を決める際に参考にするために最大出力
点より 5%ずつダウンさせていき、ダウンした電力
までを観測できる角度範囲を表2にまとめた。
最大出力点からのダウン率 マイナス プラス
5% 6° 6°
10% 12° 10°
15% 16° 12°
20% 20° 15°
25% 24° 18°
表2:縦に動かした場合のダウン率
(8)パネルに対し横に動かした場合
この時、太陽に対し正面になる角度で固定して測
定を行った。この際、東をマイナス側、西をプラス側
にしてグラフにした。
グラフ6:パネルに対し横に動かした場合
最大出力点の電力は312mWとなった。また、こ
ちらも縦に動かした場合と同様に最大出力点より
5%ずつダウンさせた際の電力までを観測できる方位
範囲を表3にまとめた。
最大出力点からのダウン率 マイナス プラス
5% 20° 25°
10% 30° 30°
15% 40° 35°
20% 45° 40°
25% 50° 45°
表3.横に動かした場合のダウン率
4.太陽軌道について
(1)太陽高度の変動
1か月ごとの平均高度と最高高度の平均を表にし、
観測範囲を決める際の参考にした。
太陽高度データは、太陽高度を計算することがで
きる高精度計算サイト[ke!san]を使用して求めた。
月 平均高度 最高高度平均
1月 25.2° 33.6°
2月 30.2° 42.0°
3月 36.0° 52.4°
4月 41.3° 63.4°
5月 45.5° 72.8°
6月 46.6° 76.8°
7月 46.2° 74.9°
8月 44.1° 68.8°
9月 38.1° 56.4°
10月 32.2° 44.9°
11月 26.7° 36.1°
12月 23.6° 31.1°
表4:太陽の平均高度と最高高度平均
1年間の最高高度は6月22日の77.7°だった。
3 か月ごとのデータも取り、データを参考にどの季
節を基準に観測角度方位を決めていくかを決める。
以上のことから、6月に最も発電すると考え、これを
基準に観測を行うことにした。
平均高度 最高高度平均
5~7月 46.1° 74.8°
4~8月 44.8° 71.3°
3~9月 42.6° 66.5°
2~10月 38.7° 58.8°
表5:一定期間内の平均高度
表 5 は、6 月を中心として一定期間内の平均高度
と最高高度平均を表にしたものである。
(2)発電時間について
有効発電時間を求め、観測角度方位を決める際の
参考にした。
太陽との距離が長くなると日光が大気中の塵や水
蒸気に当たる時間が長くなり、発電量も減ってしま
う。そのため、太陽高度が10°以上の時を有効発電
範囲として考え、先述の計算サイトを使い、発電時
間と有効時間を表6にまとめた。
・観測日時:平成29年12月20日 12時15分
・太陽位置:太陽高度 30.49°

表6:発電可能時刻
5.設置角度方位について
指向性と太陽軌道の調査データをもとに設置角度
方位を決めた。
(1)学校周辺の太陽光パネルの設置角度の調査
学校周辺に設置してあるパネルの写真を撮って、
そこから角度を測った。
図9.A地点 F地点
表7は、学校周辺のA~I地点の方位と角度を表
にしたものである。この地域に設置されている太陽
光パネルの角度を調査し、設置角度方位を決める際
の参考にした。
学校周辺に設置されている太陽光パネルの角度 方位 角度
A地点 180° 30°
B地点 170° 15°
C地点 175° 20°
D地点 180° 15°
E地点 160° 10°
F地点 195° 10°
G地点 195° 20°
H地点 180° 20°
I地点 180° 10°
表7:学校周辺の太陽光パネルの角度
(2) 最適角度について
設置角度は90°から太陽高度を引くことで求め
られる。表5より、最も平均高度と最高高度平均が
高かったのが6月だった。
地元の太陽光発電施設設置業者(ネクスト・アン
ド・リソース株式会社)に話を伺ったところ、20°
~30°で設置するのが良いと聞いた。
表2より、ダウン率を最小にするために太陽位置
から±6°以内に収めたいと考えた。また、表6よ
り発電時間が10時間を超えている時期に観測した
いと考え、表5の3~9月の最高高度平均データを
基準にしていきたいと考え、この時期の最高高度平
均と1年の最高高度との比較をした。1年の最高高
度から設置角度を求めた結果、12.3°となった。ま
た、3~9月の最高高度平均から設置角度を求めた
結果23.5°となった。朝や夕方の高度も考慮する
と、12.3°より23.5°のほうがより発電できるの
ではないかと考えた。そのため、23~24°で行う。
表7の太陽光パネルの角度の中心が20°である
ことと企業から聞いた話の角度範囲内であることか
らこの設置角度は妥当だと判断した。
(3) 最適方位について
方位は南中時の180°に近いほど発電効率が上が
るのではないかと考え、設置方位は180°から±
2°の間で行うことにした。
発電開始時刻 発電終了時刻 有効時
間[h]
1月(上旬) 8時15分 15時45分 7.50
1月(下旬) 8時00分 16時00分 8.00
2月(上旬) 8時00分 16時15分 8.25
2月(下旬) 7時15分 16時45分 9.50
3月(上旬) 6時30分 17時15分 10.75
3月(下旬) 6時30分 17時15分 10.75
4月(上旬) 6時30分 17時15分 10.75
4月(下旬) 6時15分 17時00分 10.75
5月(上旬) 5時45分 17時45分 12.00
5月(下旬) 5時45分 17時45分 12.00
6月(上旬) 5時45分 18時00分 12.25
6月(下旬) 5時45分 18時00分 12.25
7月(上旬) 5時45分 18時00分 12.25
7月(下旬) 5時45分 18時00分 12.25
8月(上旬) 6時15分 17時30分 11.25
8月(下旬) 6時15分 17時30分 11.25
9月(上旬) 6時15分 17時15分 11.00
9月(下旬) 6時15分 17時15分 11.00
10月(上旬) 7時00分 16時45分 9.75
10月(下旬) 7時15分 15時45分 8.50
11月(上旬) 7時15分 15時45分 7.75
11月(下旬) 7時45分 15時30分 7.75
12月(上旬) 7時45分 15時30分 7.75
12月(下旬) 8時15分 15時30分 7.25

6.試験装置について
(1)試験装置
図10:試験装置
先述した中で求めた設置角度が23~24°、設置方位が
180°から±2°で、20個の太陽光パネルが必要となるた
め、20個のパネルを設置でき、同時にモニタ出来る試験
装置を作った。太陽光パネルとターミナル端子を繋
ぐケーブルは、事前に測って3mが適格だと判断し
3mで接続する。ターミナル端子の防水は、開閉の
できる防水ボックスに入れることで解決し、太陽光
パネルを繋いだケーブルはボックスの側面に穴を開
け、そこから通してターミナル端子と接続した。20
個の太陽光パネルを固定して観測をおこなうが、出
力された電力は20個の出力電力を同時にモニタ出
来る装置を使用する。モニタ装置の防水も、同様の
防水ボックスに入れることで解決した。ボックス内
で計測に必要な回路を組み、土台の下に装置を固定
して完成する予定だが、今回の研究ではそこまで進
めることができなかった。
7.まとめ
試験装置の完成までが今回の研究目的だった
が、完成まで至らなかったのが反省点である。
今後は、試験装置を完成させることと、試験装
置を用いて長期的な観測をおこなっていきた
い。
8.謝辞 本研究をするにあたって、諏訪東京理科大学様、
KOA株式会社様、ネクストエナジー・アンド・リソー
ス株式会社様、株式会社ヨウホク様、株式会社宮脇
製作所様、有限会社湯沢電工様には大変お世話にな
りました。ありがとうございました。
9.参考文献
多結晶シリコン太陽電池について
https://unit.aist.go.jp/rcpv/ci/about_pv/types
/c-Si.html
表1の規格表
http://www.sharp.co.jp/corporate/news/090526-
a-2.html
図2とグラフ1について
http://akizukidenshi.com/download/ds/sharp/LR0
GC02.pdf
発電量について
http://standard-
project.net/solar/hatsudenryo_1day.html
高精度計算サイトについて
http://keisan.casio.jp/has10/SpecExec.cgi?id=s
ystem/2006/1185781259
10. 成果発表実績
2017.12 信州サイエンスキャンプ・全国総文県予選
(於:諏訪東京理科大)
2017.12 産業教育MIRAIフェア ポスター発表
(於:県総合教育センター)
2018.1 全国ものづくり高大連携発表会展示発表
(於:駒ヶ根市アイパル)
2018.3 信州サイエンスミーティングポスターセッション
(於:信州大学理学部)
信州自然エネルギー・環境教育支援事業
長野県教育委員会最優秀賞 受賞

11. 大学等研究者(講師)の指導の状況
諏訪東京理科大学工学部 教授 渡辺 康之 氏
研究テーマ設定・計画作成段階
・太陽光発電モジュールの基礎理論指導
・特性試験・実験方法の概要説明
・研究テーマ例の提示・情報提供
研究段階
・太陽光発電モジュールの基礎実験方法指導
・太陽光発電パネルの特性試験方法指導
研究まとめ段階
・実験結果の評価方法指導
・継続研究テーマ設定指導・対応研究者の紹介
KOA(株)技術イニシアティブ 技創りセンター
応用技術グループ 赤羽 秀樹 氏
研究段階
・実験用不可抵抗の特性と製造方法指導
・観測装置用負荷抵抗装置の提供
(株)ヨウホク 社長 北林 友和 氏
研究段階
・パネル化の指導・助言
・取り付け機構設計指導・助言
・固定具金具の製造指導・提供
(株)宮脇製作所 社長 宮脇 眞 氏
研究段階
・実験台の設計指導・助言
・実験台製造技術指導・素材提供