
중대형LPG액상분사엔진의연소특성향상연구 ... · 2010-10-16 · 저작자표시-비영리-변경금지 2.0 대한민국 이용자는 아래의 조건을 따르는

저 시-비 리- 경 지 2.0 한민
는 아래 조건 르는 경 에 한하여 게
l 저 물 복제, 포, 전송, 전시, 공연 송할 수 습니다.
다 과 같 조건 라야 합니다:
l 하는, 저 물 나 포 경 , 저 물에 적 된 허락조건 명확하게 나타내어야 합니다.
l 저 터 허가를 면 러한 조건들 적 되지 않습니다.
저 에 른 리는 내 에 하여 향 지 않습니다.
것 허락규약(Legal Code) 해하 쉽게 약한 것 니다.
Disclaimer
저 시. 하는 원저 를 시하여야 합니다.
비 리. 하는 저 물 리 목적 할 수 없습니다.
경 지. 하는 저 물 개 , 형 또는 가공할 수 없습니다.
공학박사 학위논문
대역폭을 통한 직류 배전 시스템의
전압 안정도 해석 및 설계
Bandwidth-Based Stability Analysis and
Design Specification for DC Distribution
Systems
2018년 2월
서울대학교 대학원
전기·컴퓨터공학부
강 상 우
대역폭을 통한 직류 배전 시스템의
전압 안정도 해석 및 설계
지도 교수 하 정 익
이 논문을 공학박사 학위논문으로 제출함
2017년 12월
서울대학교 대학원
전기·컴퓨터공학부
강 상 우
의 공학박사 학위논문을 인준함
2017년 12월
위 원 장 설 승 기 (인)
부위원장 하 정 익 (인)
위 원 조 보 형 (인)
위 원 원 충 연 (인)
위 원 이 규 찬 (인)

i
초 록
본 논문에서는 직류 배전 시스템을 안정적으로 설계하기 위한
방법에 대하여 연구한다. 전력변환장치로 인해 나타나는 정전력 부하가
가진 음의 저항 특성으로 인해 댐핑이 줄어들어 직류 배전 시스템의
안정도가 불안정하게 나타날 수 있기 때문에, 직류 배전 시스템에 대한
안정적인 설계가 중요하다. 기존에 시스템 설계 방법으로 사용되는
임피던스 판별법의 경우 주파수에 대한 임피던스의 크기와 위상을
동시에 고려해야 하기 때문에 설계 정보로 활용하기에는 복잡하며,
구성요소의 가변성이 존재하는 직류 배전 시스템을 대상으로
적용하기에는 한계가 존재한다.
본 논문에서는 1차 대역필터의 통과 주파수 범위로 정의되는
대역폭(Bandwidth)을 통해 시스템의 안정성을 분석한다. 대역폭은
명확한 값을 지님과 동시에, 보드선도 상에서 임피던스의 크기와 위상
정보를 포함하기 때문에 설계 정보로 활용 시 큰 이점이 존재한다. 본
논문에서는 먼저 직류 배전 시스템의 구성 요소 모델링을 통해 버스 및
부하단 시스템에 대한 대역폭을 정의하였다. 그리고 나이퀴스트 안정도
판별법을 바탕으로 대역폭과 시스템의 전압 안정도의 관계에 대하여
분석하였다. 또한 단일 버스 및 부하단을 대상으로 한 분석을 통해서
버스의 대역폭과 부하단의 대역폭 사이의 관계식을 유도하였다.
직류 배전 시스템은 구성 요소의 가변성으로 인해 특성이 독립적인
다중 전원단으로 시스템이 구성될 수 있으며, 부하단 역시 다양한
부하가 존재할 수 있다. 이를 위해 대역폭이 서로 다른 다중 전원단
시스템이 병렬로 연결되는 경우에 등가 버스 대역폭에 대해서

ii
분석하였다. 또한, 대역폭이 서로 다른 부하단이 병렬로 연결되는
경우의 등가 부하단 대역폭에 대하여 분석하였다. 분석된 결과를
바탕으로 안정적인 직류 배전 시스템을 설계하기 위한 설계 방법에
대하여 제안하였다. 안정적인 버스를 유지하기 위해 기준 그룹-발전
그룹에 기반한 전원단 설계와 가상 그룹에 기반한 전원단 설계를
제안하고 예시 설계를 모의 실험을 통해 확인하였다. 또한 다른 설계
방법으로 가상 그룹에 기반한 전원단 설계를 제안하고 예시 설계를 모의
실험을 통해 확인하였다. 그리고 실제 설계를 진행하는 경우에 존재하는
현실적인 고려사항들에 대하여 분석하였다.
제안된 대역폭 기반의 안정도 분석에 대한 검증을 위해 축소된
하드웨어 시스템을 구성하여 대역폭 해석의 결과에 대하여 실험을 통해
검증하였다.
주요어 : 직류 배전 시스템, 전압 안정도, 대역폭, 드룹 제어, 정전력
부하
학 번 : 2013-20735
iii
목 차
제 1 장 서 론 ........................................................................ 1
1.1 연구의 배경 ............................................................................. 1
1.2 연구의 목적 및 범위 ................................................................ 8
1.3 논문의 구성 ........................................................................... 12
제 2 장 임피던스 기반 직류 배전 시스템의 모델링과 임피던스 판
별법.. ......................................................................................... 13
2.1 직류 배전 시스템의 모델링 ................................................... 13
2.1.1 드룹 제어가 적용된 전원단(Source) ............................... 13
2.1.2 케이블(Cable) ................................................................. 26
2.1.3 부하단(Load) .................................................................. 28
2.2 임피던스 기반 전압 안정도 해석........................................... 31
제 3 장 대역폭 해석에 기반한 시스템 안정도 분석 및 설계 방안..
.................................................................................................. 35
3.1 나이퀴스트 안정도 판별법 ..................................................... 35
3.2 대역폭과 전압 안정도 ............................................................ 40
3.2.1 버스 임피던스와 대역폭 ................................................ 40
3.2.2 부하단 임피던스와 대역폭 ............................................. 44
3.2.3 대역폭과 전압 안정도 .................................................... 46
3.3 다중 전원단 시스템에서의 등가 버스 대역폭........................ 60
3.3.1 버스 대역폭 ................................................................... 65
3.3.2 높은 버스 대역폭 .......................................................... 69
iv
3.3.3 낮은 대역폭 ................................................................... 74
3.4 다중 부하단 시스템에서의 등가 부하단 대역폭 .................... 79
3.5 안정도 보장을 위한 직류 배전 시스템의 설계 방안 ............. 85
3.5.1 버스 설계 ....................................................................... 85
3.5.2 부하단 설계 ................................................................... 89
제 4 장 직류 배전 시스템의 대역폭 기반 설계 및 고려사항.. . 93
4.1 개요 ....................................................................................... 93
4.2 시스템 설계 1 – 기준 그룹/발전 그룹.................................... 95
4.2.1 버스 설계 – 기준 그룹 .................................................. 95
4.2.2 버스 설계 – 발전 그룹 ................................................ 100
4.2.3 부하 설계 ..................................................................... 111
4.3 시스템 설계 2 – 가상 그룹 .................................................. 117
4.3.1 버스 설계 – 가상 그룹 ................................................ 117
4.3.2 설계 1과 설계 2의 비교 .............................................. 120
4.4 모의 실험 결과 .................................................................... 122
4.4.1 대역폭과 전압 안정도 결과 ......................................... 124
4.4.2 배전단 캐패시턴스(Csta) 유무에 따른 차이 ................. 130
4.4.3 기준 그룹 - 발전 그룹 결과 ........................................ 134
4.4.4 가상 그룹 결과 ............................................................ 137
4.5 현실적인 고려사항 ............................................................... 122
4.5.1 디지털 제어의 시 지연(Time delay) .............................. 139
4.5.2 V-I 드룹 제어의 출력 임피던스 및 출력 전류 피드포워드
제어 ............................................................................................. 143
4.5.3 캐패시터의 ESR ........................................................... 157
4.5.4 버스 대역폭 측정 방법 및 버스 설계 고려사항 ........ 161
v
제 5 장 실험 및 결과.. ........................................................... 165
5.1 시스템 구성 ......................................................................... 165
5.2 48 V 시스템 설계 및 실험 결과 ........................................... 166
5.2.1 48 V 시스템 설계 ......................................................... 166
5.2.2 실험 및 결과 ............................................................... 171
5.3 250 V 시스템 설계 및 실험 결과 ......................................... 180
5.3.1 250 V 시스템 설계 ........................................................ 180
5.3.2 실험 및 결과 ............................................................... 186
제 6 장 결론 및 향후 과제.. ................................................... 197
6.1 결론 ..................................................................................... 197
6.2 향후 과제 ............................................................................. 199
참고문헌 .................................................................................. 201
Abstract .................................................................................. 213

vi
표 목차
표 2.1 드룹 제어에 따른 출력 임피던스 정리.......................... 21
표 2.2 보드 선도에 사용된 벅 컨버터의 파라미터 ................... 21
표 3.1 버스 및 부하다 대역폭에 해당하는 파라미터 ............... 48
표 3.2 fload,1를 구성하는 서로 다른 파라미터 ........................... 52
표 3.3 대역폭과 안정도 관계 검증을 위한 예제 ...................... 58
표 3.4 가상 그룹에 기반한 계통 정의 및 접속 규정 ............... 91
표 4.1 직류 배전 시스템의 예시 설계 사양 ............................. 93
표 4.2 기준 그룹-발전 그룹 시스템 설계 결과 ..................... 116
표 4.3 모의 실험 회로 파라미터 ............................................ 123
표 4.4 분석에 사용되는 파라미터 .......................................... 141
표 5.1 실험 시스템의 스펙 및 파라미터 ................................ 168
표 5.2 250V 실험 시스템의 스펙 및 파라미터 ...................... 181
표 5.3 fLC에 따라 정해지는 부하단 대역폭 및 용량 .............. 184

vii
그림 목차
그림 1.1 교류 전력 시스템의 안정도 분류 [33] ....................... 2
그림 1.2 전력변환장치로 직렬 연결된 시스템............................ 3
그림 1.3 교류 시스템에 연결되는 직류 부하의 전력변환장치 ... 3
그림 1.4 Passivity 기반의 전원단 어드미턴스 제한 방식 [52]
.................................................................................................... 7
그림 1.5 공통연결점을 기준으로 하는 임피던스 기반의 대역폭 분
석 ............................................................................................... 10
그림 2.1 직류 배전 시스템의 구성요소 .................................... 13
그림 2.2 I-V 드룹 제어의 동작 방식 ...................................... 14
그림 2.3 전원단 전력변환장치의 I-V 드룹 제어 구조 ............ 14
그림 2.4 간략화된 I-V 드룹 제어 구조 .................................. 15
그림 2.5 벅 컨버터의 I-V 드룹 제어 구조 ............................. 16
그림 2.6 벅 컨버터의 간략화 된 I-V 드룹 제어 구조 ............ 16
그림 2.7 V-I 드룹 제어의 동작 방식 ...................................... 17
그림 2.8 전원단 전력변환장치의 V-I 드룹 제어 구조 ............ 18
그림 2.9 간략화된 V-I 드룹 제어 구조 .................................. 18
그림 2.10 단일 루프 제어에 적용된 V-I 드룹 제어의 구조 ... 19
그림 2.11 간략화된 V-I 드룹 제어 구조 ................................ 19
그림 2.12 테브닌 등가회로로 치환된 전원단 전력변환장치 .... 21
그림 2.13 PI 제어기가 적용된 전류 루프 Ti 예시 ................... 22
그림 2.14 전류 전달함수와 근사화된 Tcl 비교 ........................ 22

viii
그림 2.15 식 (2.5)와 식 (2.14)의 출력 임피던스 비교 ......... 23
그림 2.16 V-I 및 I-V 드룹 제어의 출력 임피던스 보드 선도 비
교 ............................................................................................... 25
그림 2.17 식 (2.10)의 출력 임피던스 Zo를 이루는 각 성분에 대
한 보드 선도 ............................................................................. 25
그림 2.18 케이블의 임피던스 모델 .......................................... 27
그림 2.19 케이블 파라미터 예시 [91] .................................... 27
그림 2.20 케이블 사이즈에 대한 허용 전류 규격 [93] .......... 28
그림 2.21 정전력 부하의 입력 임피던스 보드 선도 ................ 30
그림 2.22 소신호 기반의 임피던스 모델링을 통한 부하단 ...... 30
그림 2.23 서브 시스템에 대한 임피던스 판별법 ...................... 31
그림 2.24 [42]에서 제안하는 금지 영역의 복소평면 .............. 33
그림 2.25 임피던스로 표현된 [42]의 금지영역 ...................... 34
그림 2.26 다양한 금지영역을 통한 안정도 판별법 [40] ......... 34
그림 3.1 보드 선도에서 표현되는 위상 .................................... 38
그림 3.2 위상 차이에 따른 나이퀴스트 선도 개형
(a) -180o보다 큰 경우 (b) -180o보다 작은 경우 ................. 38
그림 3.3 공통 연결점에서 바라본 버스 임피던스의 구성 ........ 40
그림 3.4 버스 임피던스의 보드 선도 ....................................... 41
그림 3.5 드룹 저항에 따른 버스 임피던스의 보드 선도 .......... 43
그림 3.6 전원단 차단 주파수에 따른 버스 임피던스의 보드 선도
.................................................................................................. 43
그림 3.7 부하단 구성 ............................................................... 45

ix
그림 3.8 입력 캐패시터와 저항에 따른 부하단 임피던스 보드 선
도 ............................................................................................... 45
그림 3.9 단일 전원의 버스와 부하단으로 구성된 시스템 ........ 46
그림 3.10 버스 임피던스와 부하단 임피던스의 보드 선도 ...... 47
그림 3.11 버스 임피던스와 부하단 임피던스에 대한 나이퀴스트
선도 ........................................................................................... 47
그림 3.12 그림 3.9의 나이퀴스트 선도 시스템의 모의 실험 결과
.................................................................................................. 48
그림 3.13 버스와 부하단 임피던스의 대역폭 비교 .................. 48
그림 3.14 버스와 부하단 대역폭이 조정된 시스템 .................. 48
그림 3.15 버스와 부하단 임피던스의 보드 선도 (fbus, fbus,1, fload,
fload,1) ........................................................................................ 50
그림 3.16 버스와 부하단 임피던스의 나이퀴스트 선도
(fbus, fbus,1, fload,1, fload,2) ............................................................ 50
그림 3.17 fbus와 fload,1을 결합한 시스템의 모의 실험 결과 ...... 51
그림 3.18 fbus와 fload,2를 결합한 시스템의 모의 실험 결과 ...... 51
그림 3.19 fbus,1와 fload,2를 결합한 시스템의 모의 실험 결과 ... 51
그림 3.20 대역폭이 동일하고 파라미터가 다른 부하단 임피던스와
버스 임피던스의 보드 선도 ....................................................... 52
그림 3.21 대역폭이 동일하고 파라미터가 다른 부하단 임피던스와
버스 임피던스에 대한 나이퀴스트 선도 결과 ........................... 53
그림 3.22 서로 다른 파라미터의 fload,1의 시뮬레이션 결과 ..... 53
그림 3.23 동일한 버스와 부하단 대역폭에서 교점의 위치 ...... 54
x
그림 3.24 fLC와 fbw에 따른 ksta ............................................... 56
그림 3.25 대역폭과 전압 안정도 .............................................. 57
그림 3.26 부하의 기준 대역폭 이하와 이상에서의 시스템 보드 선
도 (ksta=0.2) ............................................................................ 58
그림 3.27 부하의 기준 대역폭 이하와 이상에서의 나이퀴스트 선
도 결과 (ksta=0.2) ................................................................... 59
그림 3.28 Cond1에 대한 모의 실험 결과 ................................ 59
그림 3.29 Cond2에 대한 모의 실험 결과 ................................ 59
그림 3.30 다중 전원단 시스템으로 구성된 버스 ...................... 60
그림 3.31 동일한 4개의 전원단 시스템으로 이루어진 버스 임피
던스와 부하단 임피던스의 보드 선도 (fbw=300Hz) ................ 62
그림 3.32 동일한 4개의 전원단 시스템으로 이루어진 버스 임피
던스와 부하단 임피던스에 대한 나이퀴스트 선도 결과
(fbw=300Hz) ............................................................................ 62
그림 3.33 동일한 4개의 전원단 시스템에 대한 모의 실험 결과
(fbw=300Hz) ............................................................................ 63
그림 3.34 동일한 4개의 전원단 시스템으로 이루어진 버스 임피
던스와 부하단 임피던스의 보드 선도 (fbw=450Hz) ................ 63
그림 3.35 동일한 2개의 전원단 시스템으로 이루어진 버스 임피
던스와 부하단 임피던스에 대한 나이퀴스트 선도 결과
(fbw=450Hz) ............................................................................ 64
그림 3.36 동일한 4개의 전원단 시스템에 대한 모의 실험 결과
(fbw=450Hz) ............................................................................ 64

xi
그림 3.37 대역폭이 다른 전원단이 병렬로 붙는 경우 ............. 65
그림 3.38 비슷한 대역폭을 구성하는 임피던스를 나타내는 근사
보드 선도 ................................................................................... 66
그림 3.39 병렬로 구성된 두 전원단 컨버터의 임피던스 크기 차이
가 나는 경우 ............................................................................. 68
그림 3.40 전원단의 제어 대역폭이 다른 두 전원단 컨버터가 병렬
로 구성되는 경우 ...................................................................... 69
그림 3.41 높은 대역폭이 가능한 임피던스 조합 ...................... 70
그림 3.42 높은 대역폭 추가 시 Case 1에 해당하는 시스템 보드
선도 ........................................................................................... 70
그림 3.43 Case 2의 병렬 임피던스와 부하 임피던스의 근사 보드
선도 ........................................................................................... 70
그림 3.44 높은 대역폭 추가 시 Case 2에 해당하는 시스템 보드
선도 ........................................................................................... 71
그림 3.45 높은 대역폭 추가 시 Case 3에 해당하는 시스템 보드
선도 ........................................................................................... 73
그림 3.46 낮은 대역폭이 가능한 임피던스 조합 ...................... 74
그림 3.47 낮은 대역폭 추가 시 Case 1에 해당하는 시스템 보드
선도 ........................................................................................... 74
그림 3.48 Case 2의 병렬 임피던스와 부하 임피던스의 근사 보드
선도 ........................................................................................... 76
그림 3.49 낮은 대역폭 추가 시 Case 2에 해당하는 시스템 보드
선도 ........................................................................................... 76

xii
그림 3.50 낮은 대역폭 추가 시 Case 3에 해당하는 시스템 보드
선도 ........................................................................................... 77
그림 3.51 다중 전원단 병렬 연결 시 등가 버스 대역폭 .......... 78
그림 3.52 다중 부하단으로 연결되어 있는 구조 ...................... 79
그림 3.53 부하 병렬 시 시스템 임피던스에 대한 보드 선도 ... 81
그림 3.54 부하 병렬 시 시스템에 대한 나이퀴스트 선도 결과 ...
.................................................................................................. 81
그림 3.55 동일한 2개 부하가 연결된 시스템에 대한 모의 실험
결과 ........................................................................................... 82
그림 3.56 서로 다른 대역폭을 지닌 부하단의 보드 선도 ........ 83
그림 3.57 대역폭이 다른 부하의 병렬 보드 선도 .................... 83
그림 3.58 다중 부하가 연결되어 있는 경우의 등가 부하단 대역폭
.................................................................................................. 84
그림 3.59 직류 배전 시스템의 설계 ....................................... 85
그림 3.60 기준 그룹 – 발전 그룹 구조의 설계 방식 ............... 87
그림 3.61 가상 그룹 구조의 설계 방식 ................................... 88
그림 4.1 기준 그룹/발전 그룹 기반 직류 배전 시스템 구조 .... 95
그림 4.2 확장 가능한 최대 용량을 고려한 설계 ...................... 96
그림 4.3 드룹 저항과 케이블 저항이 고려된 계통전압 강하 ... 97
그림 4.4 버스 임피던스 보드 선도 ........................................... 99
그림 4.5 근사 보드 선도 – 낮은 용량의 발전 그룹에 가능한 유형
(a) fbus,g<10Fbus, (b) fbus,g>10FLC .......................................... 102
그림 4.6 식 (4.14)를 만족시키는 10kW 발전 그룹이 연결된 경
xiii
우 버스 보드 선도 ................................................................... 104
그림 4.7 식 (4.15)를 만족시키는 10kW 발전 그룹이 연결된 경
우 버스 보드 선도 ................................................................... 104
그림 4.8 근사 보드 선도 – 비슷한 용량의 발전 그룹에 가능한 유
형 ............................................................................................. 106
그림 4.9 150kW 발전 그룹이 연결된 경우 버스 보드 선도 ........
................................................................................................ 107
그림 4.10 근사 보드 선도 – 큰 용량의 발전 그룹에 가능한 유형
................................................................................................ 108
그림 4.11 600kW 발전 그룹이 연결된 경우 버스 보드 선도 110
그림 4.12 모든 발전 그룹이 연결된 경우 버스 보드 선도 .... 110
그림 4.13 식 (4.12), (4.14) 및 (4.17)을 가지는 부하 임피던스
보드 선도 ................................................................................. 113
그림 4.14 가상 그룹 기반 직류 배전 시스템의 구조 ............. 117
그림 4.15 설계된 가상 그룹의 임피던스 보드 선도 .............. 119
그림 4.16 모의 실험 회로도 ................................................... 122
그림 4.17 200 kW 부하에 대한 나이퀴스트 선도 결과 ......... 125
그림 4.18 20kW 부하 변동에 대한 200kW 시스템의 모의 실험
결과 ......................................................................................... 125
그림 4.19 Ls 변동에 대한 나이퀴스트 선도 결과 .................. 127
그림 4.20 Ls(200uH)에 대한 모의 실험 결과 ....................... 127
그림 4.21 Ls(50uH)에 대한 모의 실험 결과 ......................... 128
그림 4.22 기준 그룹의 fbw 변동에 대한 나이퀴스트 선도 결과
xiv
................................................................................................ 129
그림 4.23 fbw(50Hz)에 대한 모의 실험 결과 ........................ 129
그림 4.24 Csta가 있는 10kW 부하에서 시스템 나이퀴스트 선도
결과 ......................................................................................... 131
그림 4.25 Csta가 있는 시스템에서 1kW 부하 변동에 대한 10kW
시스템 의 안정도 .................................................................... 131
그림 4.26 Csta가 없는 시스템에서의 10kW 부하에 대한 나이퀴스
트 선도 .................................................................................... 133
그림 4.27 Csta가 없는 시스템에서 1kW 부하 변동에 대한 10kW
시스템 의 안정도 .................................................................... 133
그림 4.28 Csta가 없는 시스템에서 동특성이 조절된 부하에 대한
시스템 안정도 .......................................................................... 134
그림 4.29 기준 그룹(200kW), 발전 그룹(770kW)과 부하
(950kW)에 대한 보드 선도 ................................................... 135
그림 4.30 기준 그룹(200kW), 발전 그룹(770kW)과 부하
(950kW)에 대한 나이퀴스트 선도 결과 ................................ 135
그림 4.31 950kW 부하변동까지의 모의 실험 결과 ............... 136
그림 4.32 가상 그룹 설계에서 1MW 용량에 대한 버스와 부하의
임피던스 보드 선도 ................................................................. 137
그림 4.33 1MW 용량에 대한 버스와 부하의 나이퀴스트 선도 ....
................................................................................................ 138
그림 4.34 1MW 용량에 해당하는 모의 실험 결과 ................. 138
그림 4.35 디지털 제어의 시 지연을 반영한 V-I 드룹 제어 구조
xv
................................................................................................ 140
그림 4.36 더블 샘플링(Tsamp=0.5Tsw)과 시 지연이 없는 경우
(Tsamp=0)에 대한 전류루프 게인 Ti 보드 선도 .................... 141
그림 4.37 더블 샘플링(Tsamp=0.5Tsw)과 시 지연이 없는 경우
(Tsamp=0)에 대한 전압루프 게인 Tv 보드 선도 .................... 142
그림 4.38 더블 샘플링(Tsamp=0.5Tsw)과 시 지연이 없는 경우
(Tsamp=0)에 대한 출력 임피던스 Zo 보드 선도 .................... 142
그림 4.39 더블 샘플링(Tsamp=0.5Tsw)과 시 지연이 없는 경우
(Tsamp=0)에 대한 버스 임피던스 Zb 보드 선도 .................... 143
그림 4.40 전압 루프로 인한 출력 임피던스와 드룹 루프로 인한
출력 임피던스 .......................................................................... 145
그림 4.41 V-I 드룹 제어가 적용된 전원단 출력 임피던스와 전압
제어 루프의 대역폭을 가지는 1차 저역필터 시스템 ............... 145
그림 4.42 V-I 드룹 제어 및 전압제어 루프의 대역폭을 가지는 1
차 저역필터 시스템에 대한 버스 임피던스 ............................. 146
그림 4.43 부하단 대역폭 이전에 교점이 생기는 .................. 147
그림 4.44 임피던스 크기의 증가로 인해 불안정한 시스템을 나타
내는 나이퀴스트 선도 .............................................................. 148
그림 4.45 시스템의 교점이 부하단 대역폭 이후에서 버스 임피던
스의 상승하는 크기와 만나는 경우 ......................................... 148
그림 4.46 시스템의 교점이 V-I 드룹 제어로 인해 위상이 더 빠
르게 상승하는 영역에서 발생하는 경우 .................................. 150
그림 4.47 시스템의 교점이 V-I 드룹 제어로 인해 위상이 더 빠
xvi
르게 상승하는 영역에서 발생하는 경우에 대한 나이퀴스트 선도
결과 ......................................................................................... 150
그림 4.48 전압루프 대역폭으로 20Hz를 설계한 V-I 드룹 제어의
출력 임피던스 .......................................................................... 151
그림 4.49 전압루프 대역폭으로 20Hz를 설계한 V-I 드룹 제어가
적용된 버스 임피던스 .............................................................. 152
그림 4.50 출력 전류 피드포워드가 적용된 간단화된 V-I 드룹 제
어 구조 .................................................................................... 153
그림 4.51 전압 루프의 대역폭이 20Hz인 경우에 출력 전류 피드
포워드를 적용한 버스 임피던스 .............................................. 153
그림 4.52 전압 루프의 대역폭이 300Hz인 경우에 출력 전류 피
드포워드를 적용한 버스 임피던스 ........................................... 154
그림 4.53 출력 피드포워드 루프에 저역필터가 적용된 V-I 드룹
제어 ......................................................................................... 155
그림 4.54 전압 루프의 대역폭이 300Hz인 경우에 1kHz 저역필
터를 출력 전류 피드포워드 루프에 적용한 버스 임피던스 ..... 155
그림 4.55 저역필터의 대역폭에 따른 버스 임피던스의 변화 . 156
그림 4.56 전원단 출력 캐패시터에 ESR이 추가된 회로 ....... 157
그림 4.57 부하단 입력 캐패시터에 ESR이 추가된 회로 ....... 157
그림 5.1 실험에 사용한 세트 ................................................. 167
그림 5.2 실험에 사용된 회로도 .............................................. 167
그림 5.3 전원단 컨버터 1,2의 디지털 제어 블록 다이어그램 167
그림 5.4 Type-3 보상기의 파라미터 .................................... 168

xvii
그림 5.5 설계된 부하단 벅 컨버터의 입력 임피던스 ............. 168
그림 5.6 전해 (68uF) 및 필름 캐패시터 (10uF, 32uF)의 ESR
측정 결과 ................................................................................. 171
그림 5.7 ESR이 고려된 버스 임피던스와 1차 출력 저역필터를 출
력 임피던스로 가지는 버스 임피던스(=기준 버스 임피던스)의 비
교 ............................................................................................. 172
그림 5.8 42uF 부하 캐패시터를 가지는 부하단이 연결된 시스템
에서 전원단의 제어 대역폭이 1kHz로 설계된 경우의 시뮬레이션
(왼쪽) 및 실험 결과(오른쪽).................................................. 173
그림 5.9 42uF 부하 캐패시터를 가지는 부하단이 연결된 시스템
에서 전원단의 제어 대역폭이 200Hz로 감소한 경우의 시뮬레이션
(왼쪽) 및 실험 결과(오른쪽).................................................. 174
그림 5.10 140W에서의 실험 확대 파형 ................................. 174
그림 5.11 200Hz 전원단 제어 대역폭을 가지는 버스 임피던스와
1kHz 전원단 제어 대역폭을 가지는 기준 버스 임피던스 ...... 175
그림 5.12 10uF 부하 캐패시터를 가지는 부하단이 연결된 시스템
에서 전원단의 제어 대역폭이 1kHz로 감소한 경우의 시뮬레이션
(왼쪽) 및 실험 결과(오른쪽).................................................. 176
그림 5.13 10uF 부하 캐패시터를 가지는 부하단이 연결된 시스템
에서 전원단의 제어 대역폭이 200Hz로 감소한 경우의 시뮬레이션
(왼쪽) 및 실험 결과(오른쪽).................................................. 177
그림 5.14 4W에서 8W로 부하가 변동하는 경우의 필터 전류 및
버스 전압의 동특성 (왼쪽: 1kHz 제어 대역폭, 오른쪽: 200Hz 제

xviii
어 대역폭) ............................................................................... 178
그림 5.15 8W에서 16W로 부하가 변동하는 경우의 필터 전류 및
버스 전압의 동특성 (왼쪽: 1kHz 제어 대역폭, 오른쪽: 200Hz 제
어 대역폭) ............................................................................... 178
그림 5.16 16W에서 25W로 부하가 변동하는 경우의 필터 전류
및 버스 전압의 동특성 (왼쪽: 1kHz 제어 대역폭, 오른쪽: 200Hz
제어 대역폭) ........................................................................... 178
그림 5.17 대역폭이 높은 발전 그룹이 연결된 경우 .............. 179
그림 5.18 실험에 사용된 250V 시스템 회로도 ..................... 181
그림 5.19 전원단 및 부하단 컨버터의 제어 블록 다이어그램181
그림 5.20 버스 임피던스에 대한 보드 선도 ........................... 183
그림 5.21 3kW에 해당하는 부하단 입력 임피던스 ................ 184
그림 5.22 22uF의 캐패시턴스를 포함한 부하단 컨버터의 입력 임
피던스 ...................................................................................... 185
그림 5.23 실험 결과에 대한 모의실험 결과.
(a): 이상적인 정전력 부하와 V-I 드룹 제어가 적용된 버스
(b): 부스트 컨버터가 적용된 부하단 컨버터와 V-I 드룹 제어가
적용된 버스
(c): 부스트 컨버터가 적용된 부하단 컨버터와 출력 전류 피드포
워드가 추가된 V-I 드룹 제어가 적용된 버스
(d): 부스트 컨버터로 이루어진 부하단 컨버터와 전원단 제어 대
역폭이 절반으로 줄어든 버스
(e): 제어 대역폭이 1.5배 늘어난 부하단 컨버터와 V-I 드룹 제

xix
어가 적용된 버스
(f): 제어 대역폭이 0.5배 줄어든 부하단 컨버터와 V-I 드룹 제어
가 적용된 버스 ........................................................................ 188
그림 5.24 V-I 드룹 제어가 적용된 버스와 22uF의 부하단 캐패
시터를 가지는 부하단 컨버터의 실험 결과 ............................. 189
그림 5.25 시스템이 불안정해지는 순간을 확대한 파형 ......... 190
그림 5.26 V-I 드룹 제어에 출력 전류 피드포워드가 경우의 실험
결과 ......................................................................................... 192
그림 5.27 V-I 드룹 제어가 적용된 전원단의 제어 대역폭을
50Hz 줄인 결과 ...................................................................... 193
그림 5.28 부하단 컨버터의 제어 대역폭을 1.5배 증가시킨 실험
결과 ......................................................................................... 194
그림 5.29 부하단 컨버터의 제어 대역폭을 0.5배 감소시킨 실험
결과 ......................................................................................... 195
xx
1
제 1 장 서 론
1.1 연구의 배경
직류 배전 시스템은 전력전자 기술의 발달과 함께 직류 형태의
에너지를 사용하는 디지털 부하, 신 재생 에너지 및 에너지 저장장치의
보급과 이들을 통합하는 마이크로그리드의 확산으로 인해 많은 관심을
받고 있다 [1-11]. 전자기기들의 보급과 사물 인터넷의 활성화로
전력량이 큰 폭으로 증가하고 있는 데이터센터의 경우 전력손실을
줄이기 위한 목적으로 현재의 교류기반 시스템을 직류기반 시스템으로
바꾸기 위한 연구가 활발히 이루어지고 있는데 [12-14], 인텔 社 및 NTT
社에서 480 V 기반의 교류 시스템과 400 V 기반의 직류 시스템에 대해
비교한 결과 직류 시스템으로의 변화를 통해 전력변환 단계가 줄어들어
기존 교류 시스템 대비 약 7-8%의 에너지 절감 효과와 함께 33%의 공간
절약 및 15%의 전기시설 비용 감소의 결과를 얻었다 [15-16]. 최근
각광을 받고 있는 마이크로그리드에서도 교류 시스템에 대한 운영상의
이점을 바탕으로 직류 기반의 마이크로그리드에 대한 연구가 활발히
이루어지고 있는데 [17-28], 국내에서는 한국전력에서 전라남도
서거차도에서 태양광 200 kW, 풍력 100 kW, 에너지 저장장치 1.5 MWh를
통합한 직류 배전망 사업을 추진하여 주민 편의 개선 및 에너지 효율
향상을 목표로 하고 있다 [29]. 직류기반 전기추진 선박은 연비 개선 및
소음 감소에 효과적이라는 결과를 얻었으며 [30-31], Boeing 787 및
A380에 적용된 More Electric Aircraft (MEA) 구조에도 직류 배전 시스템이
사용되고 있다 [32].

2
안정적인 전력 시스템의 동작을 위해서는 시스템의 안정도를 고려한
설계가 필수적이다. 전력 시스템 안정도는 주어진 초기 동작 조건에서
외란이 가해진 후 전체 시스템의 손상 없이 동작 평형점으로 도달할 수
있는 능력으로 정의된다 [33]. 교류 전력 시스템의 안정도는 그림 1.1과
같이 위상각 안정도(Rotor angle stability), 주파수 안정도(Frequency stability),
전압 안정도(Voltage stability)로 나눌 수 있으며, 각각의 안정도는 다시
세부 안정도 항목으로 분류된다. 독립된 항목으로 분류되지만 각각의
안정도는 모두 연관성을 지니며, 교류 계통망에 대해 정의된 다양한
접속규정들에 맞춰 구성요소를 설계하는 것으로 시스템을 안정적으로
운용할 수 있다. 직류 시스템에서는 발전원이 전력변환장치를 통해 직류
계통과 분리되고, 주파수가 존재하지 않는다. 따라서, 직류 시스템의
안정도에서는 그림 1.1의 위상각 안정도와 주파수 안정도는 소거되고
전압 안정도가 전체 시스템 안정도의 고려 대상이 된다.
직류 시스템의 전압 안정도는 그림 1.2에 나와있는 전력변환장치들
사이의 상호간섭에 의해 결정되는데, 이 중 부하단(Load System)에
그림 1.1 교류 전력 시스템의 안정도 분류 [33]

3
존재하는 정전력 부하(Constant Power Load, CPL)가 시스템을 불안정하게
만드는 주된 요소가 된다 [34]. 교류 시스템 역시 정전력 부하로 인해
불안정해질 수 있지만 [35-37], 정전력 부하로 인한 전압 안정도는 교류
시스템에 비해 직류 시스템에서 더 문제가 될 수 있다. 그림 1.3은 교류
시스템에 연결되는 직류 부하의 전력변환장치이며, 정전력 부하로
동작하는 DC/DC 컨버터 앞에 역률보상회로(PFC)가 존재하여 계통의
역률 규정에 대응한다. 전압과 전류의 위상을 맞추기 위한 PFC의
동작으로 해당 부하는 정저항 부하(Constant Resistor Load, CRL)로
동작하고 [38], 그에 따라 교류 시스템에 감쇠(Damping) 요소로
작동하므로 시스템의 안정도 향상에 기여한다. 반면 직류 시스템에서는
PFC가 사라지고 정전력 부하로 동작하는 DC/DC 컨버터가 직접적으로
연결되기 때문에, 시스템에 음의 저항(Negative Incremental Resistance)으로
Source System
LoadSystem
v
Interaction
그림 1.2 전력변환장치로 직렬 연결된 시스템
그림 1.3 교류 시스템에 연결되는 직류 부하의 전력변환장치
4
나타나게 되어 안정성을 저해하는 요소가 된다. 따라서 안정적인 직류
시스템의 운용을 위해서는 설계 시 전압 안정도에 대한 고려가
필수적으로 요구된다.
직류배전 전기추진 선박에 대해 정의된 국제 규격인 IEEE Standard
1709(IEEE Recommendation Practice for 1kV to 35kV Medium-Voltage DC
Power Systems on Ships)에서는 전압 안정도에 대해 시간 영역의
시뮬레이션 기반 검증과 주파수 영역의 임피던스 기반 판별을 제시한다
[39]. 임피던스 판별법은 그림 1.2와 같이 연결된 전력변환장치 사이에서
정의되는 입/출력 임피던스를 바탕으로 System loop gain을 정의하고 이를
기반으로 시스템의 안정도를 판단한다 [40-49]. 안정도 판별에 대한
여유도를 부여하는 정도에 따라 Middlebrook [41], GMPM [42], OAC [43-45]
등 다양한 방법들이 제안 되었으며, 시스템 내부의 상태를 알 필요 없이
임피던스 정보만을 통해 안정도를 판별할 수 있기 때문에 시스템의
형태가 고정되어 있지 않아도 되는 장점을 가지고 있다. 하지만 기존에
제안되었던 임피던스 판별법을 통해 시스템의 전압 안정도를 판별할
수는 있지만, 배전 시스템 설계에 적용하기 위한 직접적인 설계 정보를
얻기는 힘들다는 한계가 있다. 그 이유는 제시된 설계 조건들의 과다한
설계 안정도 및 복잡성에 존재한다. 참고문헌 [41]에서는 전원단 출력
임피던스의 크기보다 부하단 입력 임피던스의 크기를 충분히 크게
만드는 것을 안정한 시스템의 설계 조건으로 제시하였는데, 해당 조건을
지키는 설계를 배전 시스템에 적용하는 것도 어렵지만, 해당 조건을
만족시키지 않는다고 시스템이 항상 불안정한 것이 아니기 때문에
과다한 설계 안정도로 인해 시스템에 불필요한 낭비가 발생하게 된다.
이를 해결하기 위해 [42-49]에서는 복소평면 상에서 정의된 금지
영역(Forbidden Zone)을 기반으로 부하단의 입력 임피던스에 대한 설계
조건을 제시해 [41]에 존재하는 과다한 설계 안정도를 줄이려고 하였다.

5
금지영역을 임피던스 보드 선도로 표현할 경우 크기(Magnitude)와
위상(Phase)이 주파수(Frequency)에 대해 동시에 고려되기 때문에 [41]에
비해 과도하게 확보되는 설계 여유도가 감소하는 장점이 존재한다.
하지만 크기와 위상에 대해 정의된 설계 조건을 동시에 만족시켜야 하기
때문에 설계 조건의 정형화가 어려워진다. 그로 인해 배전 시스템에
대한 설계 기준으로 적용하기에는 어려움이 발생한다.
시스템에 대한 소신호 및 대신호 기반의 전압 안정도 해석을 통해
시스템의 설계 정보를 얻으려는 연구들 역시 제안되었다. 소신호 기반의
Hopf bifurcation point 해석 [50-57]은 시스템의 상태 공간 방정식으로부터
고유값을 도출하여 시스템의 특정 변수의 변화가 안정도에 미치는
영향에 대해 분석한다. 파라미터가 고정되어 있는 상황에서 변수를
설정하고, 해당 변수를 스윕(sweep)하여 얻게 되는 시스템의 고유값
궤적을 통해 변수의 방향성과 시스템의 안정도 사이의 관계를 파악하여
안정도를 늘리는 방향으로 설계를 제안한다. 대신호 기반의 에너지 직접
해석법 [58-65]은 Lyapunov 이론을 통해 시스템의 평형점 근처에서
발생하는 소신호 외란이 아닌 부하 급변, 초기 구동 및 고장 등과 같은
대신호 외란에 대해 시스템 안정도를 해석하기 위해 제안되었다. 소신호
해석법이 변수 변화에 대해 시스템의 안정성 여부만을 판단하는 것과
달리 대신호 해석법의 경우 시스템이 안정할 수 있는 상태 변수의
궤적을 직접 구할 수 있기 때문에 소신호 해석법에 비해 얻을 수 있는
설계 정보가 많아지는 장점이 존재한다. 하지만 서술된 소신호 및
대신호 기반의 방법은 시스템의 상태 공간 방정식을 기반으로 하기
때문에 해석의 대상이 되는 시스템이 고정이 되어 있어야 하는 문제가
있다. 또한 시스템이 복잡해질수록 분석해야 하는 상태 변수 방정식의
복잡도가 기하급수적으로 증가한다는 단점이 존재한다. 소신호 기반의
분석인 경우 컨버터 내부의 상태변수들과 시스템에 존재하는

6
수동소자들의 개수에 의해 상태 변수 방정식의 차원이 결정되며, 대신호
기반의 분석은 정전력 부하의 모델이 반영되는 경우 기하급수적으로
모델의 차원이 증가하는 문제가 발생한다. 따라서, 소신호 및 대신호
기반의 전압 안정도 해석을 통한 시스템 설계는 모든 시스템의
구성요소가 고정되어 있거나 작은 범위를 대상으로 하는 시스템에서는
사용이 가능하지만, 시스템이 복잡해질수록 사용이 어려워진다. 이러한
단점으로 인해 해당 방법의 경우 직접적인 시스템 설계에
활용하기보다는 이미 설계된 시스템을 최적화하는 용도에 적합하다.
마찬가지 맥락으로 해석된 시스템의 설계 정보를 바탕으로 시스템의
안정도를 향상시키는 방향에 대해서도 다양한 연구들이 진행되었다.
주로 능동 댐핑(Active Damping)을 활용하여 시스템 안정도를 향상시키는
시도를 하였는데, 별도의 하드웨어와 함께 고성능 통신을 활용하여
불안정을 일으키는 전력변환장치를 실시간으로 보상해주는 방법 [66-67],
제어를 통해 전원단 임피던스를 수정하는 방법 [57, 59, 68-70], 제어를
통해 부하단 임피던스를 수정하는 방법 [60, 61, 71-75], 그리고 병렬 능동
댐퍼를 추가해 시스템을 안정화하는 방법 [76-81, 86] 등 다양한 연구들이
제안되었다. 하지만 시스템이 고정되어 있는 상황에서 사용하는 것이
효과적인 방법들이기 때문에 직접적인 설계 방법으로 사용하기에는
적절하지 않으며, 앞서 언급된 소신호 및 대신호 기반의 안정도 해석과
함께 설계된 시스템의 최적화의 관점에서 적합한 방법이 된다.
직류 배전 시스템은 구성 요소의 플러그 앤 플레이(Plug&Play, PnP)
동작으로 인해 가변성과 확장성을 가지므로, 고정된 시스템의 안정도
해석을 통한 설계보다는 시스템을 구성하는 개별 요소들에 대한 설계
조건을 제시해 전체 안정도에 대한 해석 없이, 개별 구성 요소들의 설계
조건을 만족하는 것으로 전체 안정도를 유지하는 것이 바람직한 접근
방법이다. 이를 위해 [82-83]은 passivity 기반의 안정도 판별 [84]을 통해

7
self-disciplined stabilization을 위한 직접적인 전원단 설계 조건에 대해
제안하였다. 해당 방법에서는 그림 1.4와 같이 전원단과 부하단
컨버터에서 발생할 수 있는 어드미턴스 영역(Admittance region)에 대해
전원단의 어드미턴스 영역을 제한한다. 이를 통해 두 컨버터 시스템의
위상 차이를 항상 설정된 PM(Phase Margin) 이상으로 유지하게 만들면,
두 시스템은 최소한의 PM을 유지하게 되므로 전체 시스템이 passivity를
유지할 수 있다. Passivity 이론에 따라 passivity를 만족하는 시스템이
연결되는 경우에는 전체 시스템 역시 passivity를 만족하기 때문에, 개별
컨버터의 설계 조건을 지키는 것으로 전체 시스템의 안정도가
자동적으로 보장된다. 그로 인해 시스템이 복잡해져도 전체 시스템
안정도에 대한 별도의 해석이 필요하지 않게 된다. 하지만 전원단의
위상 각도를 해당 연구와 같이 제한할 수 있는 경우는 케이블
임피던스가 고려되지 않았을 때로, 실제 케이블 임피던스가 존재하게
되면 인덕턴스 성분으로 인해 제 4사분면(Re>0, Im<0)에서 허용가능한
어드미턴스 영역을 제한해 PM을 유지하는 것이 어려워진다. 또한, 저항
부하를 가정한 것과 달리 실제 시스템의 안정도에 문제를 일으키는
Im
Re
AdmissibleAdmittance Region
180o
Source
Load
Im
Re
AdmissibleAdmittance Region
120o
Source
Load
(a) (b)
그림 1.4 Passivity 기반의 전원단 어드미턴스 제한 방식 [52]

8
정전력 부하가 연결되는 경우에 부하의 어드미턴스 영역은 제
1사분면(Re>0, Im>0)이 아닌 제 2사분면(Re<0, Im>0)에 위치하기 때문에
단순히 전원단에만 설계 조건을 제시하는 것으로 안정도를 유지하는
것이 힘들어지는 문제가 발생한다.
정리하면 임피던스 판별법과 소신호 및 대신호 기반의 해석방법과
같은 기존의 연구들은 제한된 영역에 대해 정의된 직류 시스템에
대해서는 안정도 해석을 바탕으로 설계 정보를 얻는 것이 원활하였지만,
확장성과 변동성을 지니는 직류 배전 시스템을 대상으로 하는 경우에는
설계에 대한 명확한 정보를 얻기 힘들었다. 그로 인해 배전단의 버스
캐패시턴스를 키워 강한 계통(Stiff grid)을 만들어 안정도를 유지하는
방향으로 설계가 이루어져 왔는데 [85], 배전단의 버스 캐패시터가
커지게 되면 사고 시 발생하는 사고 전류로 인한 문제 가 발생하게 된다
[86]. 이는 직류 배전 시스템에 대한 설계 기준의 부재에 기인한다.
1.2 연구의 목적 및 범위
본 논문에서는 임피던스 판별법을 바탕으로 안정적인 직류 배전
시스템의 운용을 위하여 개별 구성요소에 대한 설계 기준을 제안하는
것을 목적으로 한다. 임피던스 판별법은 시스템 내부의 상태를 알 필요
없이 임피던스를 통해 시스템의 안정도를 판별할 수 있기 때문에 설계
지향적(Design-Oriented)인 해석 방법이지만, 기존의 연구들은 제한적인
설계 대상 및 설계 조건의 복잡성으로 인해 직접적으로 설계에
활용하기에는 어려움이 존재했다. 본 논문에서는 크기(Magnitude)와
위상(Phase)이 동시에 고려되면서, 설계 조건의 복잡성을 해결하기 위해
두 특성을 동시에 포함하고 있는 정보인 대역폭(Bandwidth)을 활용하여
시스템의 안정도 해석 및 설계 기준을 제안한다. 일반적으로 대역폭은
9
대역 필터의 통과 주파수 범위를 나타내는 값으로 대역폭을 기점으로
시스템의 특징이 변하게 된다. 배전 시스템 구성요소에 대한 서브
시스템 모델링 결과로, 전압 안정도 해석에는 1차 통과 필터가 사용된다.
따라서 본 논문에서 사용되는 대역폭은 절대값의 크기가 3dB인
지점이자 기울기가 0dB에서 ±20dB/dec로 크기가 변하는 지점이며,
위상은 초기 위상 대비 45o가 변하는 지점을 지칭한다. 단일 값으로
수치화되어 표현되며, 크기와 위상 정보를 포함하기 때문에 대역폭을
통한 설계 기준의 제시는 기존 연구들의 한계를 보완할 수 있는 장점이
존재한다.
본 논문에서 연구할 직류 배전 시스템은 발전원과 전력변환장치를
포함하는 전원단, 전원단과 공통 연결점(Point of Common Coupling, PCC)을
연결하는 케이블, 그리고 공통 연결점에 연결되는 부하단으로 구성된다.
본 논문에서는 공통 연결점을 다중 전원단이 접속하는 경우 전원단이
만나는 지점 및 전원단과 부하단이 연결되는 지점으로 정의하며,
부하단과 밀접한 위치로 가정한다. 전원단의 경우 전력 분배를 목적으로
사용되는 드룹 제어(Droop Control)를 적용하며, 테브닌(Thevenin)
등가회로를 적용한 출력 임피던스 모델을 사용해 임의의 전력변환장치를
가정한다. 케이블 길이가 길어지는 배전 시스템에서, 직류 배전 시스템의
전압 안정도를 판단함에 있어 컨버터의 출력 임피던스 뿐 아니라
케이블의 임피던스가 버스 임피던스에 미치는 영향이 크기 때문에 [87-
88] 케이블 역시 모델에 반영한다. 부하단에 존재하는 정전력 부하의
경우 직류 선박, 데이터 센터 등과 같이 시스템이 고정되어 있는 응용
분야가 아닌 경우에는 설계의 관점에서 알 수 없는 것(Unknown)이기
때문에 안정도 해석을 위해 이상적인 특징을 가정한다. 본 논문에서
분석할 시스템 모델의 배전단에는 캐패시터가 없으며, 개별 부하가
캐패시터를 포함하여 부하단을 구성하는 것으로 가정한다.

10
임피던스 판별법을 통한 전압 안정도 해석은 시스템을 두 그룹으로
나누어 전원단의 출력 임피던스와 부하단의 입력 임피던스를 비교한다.
본 논문에서는 그림 1.5와 같이 공통 연결점을 기준으로 시스템을 두
그룹으로 나누었으며, 이를 기준으로 전원단을 포함하는 버스의
대역폭과 정전력 부하를 포함하는 부하단의 대역폭을 유도한다.
대역폭과 시스템의 전압 안정도 사이의 관계를 나타내기 위해 정의된
버스의 대역폭과 부하의 대역폭에 대한 시스템 안정도의 변화를
관찰하고, 안정도를 유지하기 위한 대역폭 사이의 관계에 대해 분석한다.
실제 시스템에서는 서로 다른 파라미터를 가지는 전원단이 다중으로
시스템에 접속 되기 때문에, 대역폭이 서로 다른 다중 전원단이 공통
연결점에 병렬로 구성되는 경우 발생하는 결과에 대한 분석이 필요하다.
따라서 대역폭이 서로 다른 다중 전원단으로 구성된 경우의 등가
대역폭에 대해 분석한다. 마찬가지로 부하단 역시 용량에 따라 다양한
파라미터를 가지기 때문에, 대역폭이 서로 다른 다중 부하단이 병렬로
구성되는 경우의 등가 대역폭에 대해 분석한다. 대역폭과 안정도, 다중
그림 1.5 공통연결점을 기준으로 하는 임피던스 기반의 대역폭 분석
11
전원단 및 부하단 구성 시의 등가 대역폭에 대한 결과를 바탕으로 직류
배전 시스템이 안정적으로 동작하기 위한 전원단과 부하단에 대한 설계
방안을 대역폭을 통해 제안한다.
제시된 설계 방안을 바탕으로 직류 배전 시스템 설계를 진행한다.
대역폭 설계 기준을 통해 380V/200kW 시스템을 구성하며, 모의 실험을
통해 설계의 유효성을 입증한다. 그리고, 축소된 실험 회로를 통하여
대역폭 기반의 설계에 대한 검증을 수행하였다.

12
1.3 논문의 구성
본 논문의 구성은 다음과 같다.
2장에서는 본 논문에서 사용되는 직류 배전 시스템의 구성요소에
대한 모델링을 수행한다. 그리고 임피던스 판별법에 대한 기존 연구를
검토한다.
3장에서는 모델링 된 구성요소에 대해 임피던스를 기반으로
대역폭을 유도한다. 대역폭과 시스템 안정도의 관계에 대해 분석하며,
다중 전원단과 부하단이 병렬되어 있는 경우의 등가 대역폭에 대해
분석한다. 대역폭을 통해 안정적인 시스템 설계 방안에 대해 제안한다.
4장에서는 제안된 설계 방안을 바탕으로 직류 배전 시스템의 설계를
수행한다. 안정한 시스템 설계를 위한 전원단 역할 구조를 설명하며,
이를 기반으로 시스템을 설계하여 모의 실험을 통해 유효성을 검증한다.
그리고 실제 컨버터로 구현할 시에 필요한 현실적인 고려사항들에
대하여 분석한다.
5장에서는 제안된 대역폭 기반의 해석 및 설계를 검증하기 위해서,
축소 실험 세트를 구성하여 유효성을 검증한다.
6장에서는 본 논문의 결과와 향후 과제를 기술한다.

13
제 2 장 임피던스 기반 직류 배전 시스템의
모델링과 임피던스 판별법
본 장에서는 본 논문에서 사용하게 될 직류 배전 시스템의 모델링에
대해 다룬다. 그리고 기존의 임피던스 기반의 전압 안정도 해석 방법들
에 대해 기술한다.
2.1 직류 배전 시스템의 모델링
직류 배전 시스템은 그림 2.1과 같이 전원단(Source), 케이블(Cable)
및 부하단(Load)으로 구성된다. 본 논문에서 공통 연결점(Point of Common
Coupling, PCC)은 다중 전원단 구성 시 각각의 케이블이 모이는 지점으로
정의되며, 부하와 공통 연결점 사이의 거리는 가깝다고 가정한다. 각 구
성요소의 내부 모델과 함께 임피던스로 표현되는 모델링을 수행한다.
2.1.1 드룹 제어가 적용된 전원단(Source)
전원단은 태양광, 배터리, AC 계통, 연료전지 등과 같은 발전원과 벅,
부스트 등의 전력변환장치를 포함한다. 본 연구에서 전력변환장치의 제
그림 2.1 직류 배전 시스템의 구성요소

14
어는 드룹 제어(Droop Control)를 적용하여 출력 전압을 제어하는 것으로
가정한다. 드룹 제어로는 I-V 드룹 제어와 V-I 드룹 제어가 사용될 수 있
으며 [89], 각 경우에 대한 구조와 출력 임피던스를 분석한다.
그림 2.2는 I-V 드룹 제어의 동작 방식으로 출력 전압 vo를 기반으로
출력 전류 io를 제어하는 구조를 지닌다. 이 때, 출력 전류의 지령치는
*( )dc o d oV v k i (2.1)
와 같이 정해진다. 그림 2.3은 전력변환장치에 적용되는 I-V 드룹 제어의
구조로 내부 전류루프(Inner Current Loop)-외부 전류루프(Outer Current
Loop)-드룹 전압루프(Droop Voltage Loop)를 포함하는 삼중 루프의 형태를
나타내게 된다. Vdc는 무부하 출력 전압, kd는 드룹 상수, io*는 출력 전류의
지령치, Ti는 내부 전류루프 게인(Inner Current Loop Gain), iL은 인덕터 전류,
그림 2.2 I-V 드룹 제어의 동작 방식
iL
HoHiPWMd iL
*Vdc
vo
Ti
Co
io
kd
io*
그림 2.3 전원단 전력변환장치의 I-V 드룹 제어 구조

15
iL*는 인덕터 전류 지령치, Hi는 내부 전류루프 보상기, Ho는 외부 전류루
프 보상기를 지칭한다. iL*에서 iL로의 전달함수를 Tcl이라고 하면,
* 1iL
clL i
TiT
i T
(2.2)
제어 구조는 그림 2.4로 간략하게 표현될 수 있다. 출력 임피던스 Zo는
1 o clo
o d o cl
H TZ
sC k H T
(2.3)
로 정리되며, 식 (2.3)을 다시 정리하면
1 / ( ) 1 /
1 / 1 /d o cl d
obw bw
d o clbw
o
k H T kZ
s s
k H T
C
(2.4)
와 같이 표현할 수 있다. ωbw는 드룹 제어루프의 대역폭을 나타낸다.
그림 2.4 간략화된 I-V 드룹 제어 구조

16
한편, 전력변환장치가 벅 컨버터인 경우 인덕터 전류와 출력 전류가
동일하다. 따라서 그림 2.3은 그림 2.5와 같이 표현되며 동일한 방법으로
간략화된 드룹 제어 구조는 그림 2.6으로 정리된다. 이 경우 출력 임피던
스는 아래와 같다.
1 / ( )1
1 /d cl
oo d cl bw
d clbw
o
k TZ
sC k T s
k T
C
(2.5)
iL
kdHiPWMd iL
* Vdc
vo
Ti
Co
그림 2.5 벅 컨버터의 I-V 드룹 제어 구조
iL
kd
Vdc
vo
Tcl
Co
그림 2.6 벅 컨버터의 간략화 된 I-V 드룹 제어 구조
17
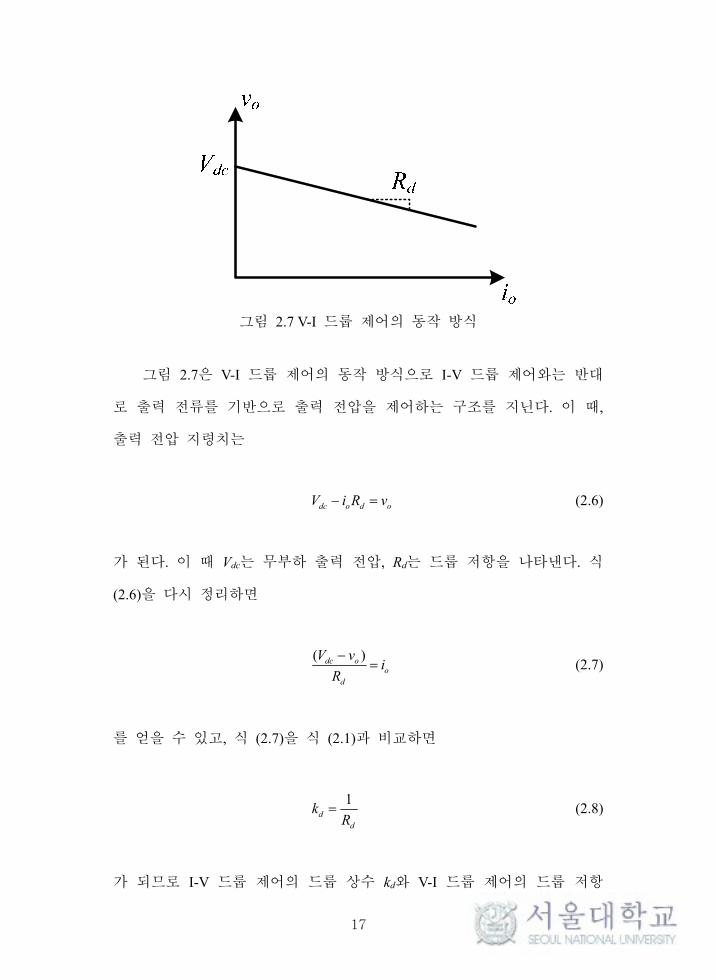
그림 2.7은 V-I 드룹 제어의 동작 방식으로 I-V 드룹 제어와는 반대
로 출력 전류를 기반으로 출력 전압을 제어하는 구조를 지닌다. 이 때,
출력 전압 지령치는
dc o d oV i R v (2.6)
가 된다. 이 때 Vdc는 무부하 출력 전압, Rd는 드룹 저항을 나타낸다. 식
(2.6)을 다시 정리하면
( )dc oo
d
V vi
R
(2.7)
를 얻을 수 있고, 식 (2.7)을 식 (2.1)과 비교하면
1d
d
kR
(2.8)
가 되므로 I-V 드룹 제어의 드룹 상수 kd와 V-I 드룹 제어의 드룹 저항
그림 2.7 V-I 드룹 제어의 동작 방식

18
Rd는 역수가 되는 것을 알 수 있다.
그림 2.8은 V-I 드룹 제어의 구조로 내부 전류루프(Inner Current
Loop)-외부 전압루프(Outer Voltage Loop)로 구성되어 있다. I-V 드룹 제어
에서 드룹 제어기가 피드백 제어 경로에 포함된 것과 달리 V-I 제어기에
서 드룹 제어기는 일종의 피드 포워드 경로를 형성하기 때문에 피드백
제어 회로에는 포함되지 않는다. Hv는 전류 보상기를 나타내며, 동일하게
Tcl을 적용하면 그림 2.9와 같이 간략화 된 제어 구조를 얻을 수 있다.
출력 임피던스 Zo는
1 d v clo
o v cl
R H TZ
sC H T
(2.9)
그림 2.8 전원단 전력변환장치의 V-I 드룹 제어 구조
iL
Hv
vo
Tcl
Co
Rd
io
Vdc
그림 2.9 간략화된 V-I 드룹 제어 구조

19
가 되며, 이 식을 다시 정리하면
1 / ( )
1 / 1 /v cl d
obw bw
v clbw
o
H T RZ
s s
H T
C
(2.10)
로 표현이 가능하다.
한편, 내부 전류 루프를 포함하는 이중 루프 제어(Two-Loop Control)
이외에 출력전압 제어만을 적용한 단일 루프 제어(Single-Loop Control)에
V-I 드룹 제어를 적용할 수도 있는데, 이 경우의 드룹 제어 구조와 간략
HvPWMd Vdc
vo
Tv
Co
Rd
io
vo*
그림 2.10 단일 루프 제어에 적용된 V-I 드룹 제어의 구조
그림 2.11 간략화된 V-I 드룹 제어 구조

20
화 된 제어 구조는 그림 2.10과 그림 2.11로 표현 된다. vo*에서 vo로의 전
달함수를 Tvl이라고 하면,
* 1o v
vlo v
v TT
v T
(2.11)
가 되고, 출력 임피던스 Zo는 다음과 같이 표현된다.
1v
o dv
TZ R
T
(2.11)
Tcl과 Tvl은 각각 전류루프의 대역폭과 전압루프의 대역폭을 차단 주파수
로 가지는 1차 시스템으로 근사가 가능하며, 전압 루프의 대역폭을 ωbw
라고 하면 식 (2.11)은 다음과 같이 표현된다.
1 /d
obw
RZ
s
(2.12)
그림 2.12는 테브닌 등가회로로 치환된 전원단 전력변환장치의 구조
를 나타내며, 출력 임피던스 Zo를 드룹 제어기의 종류 및 적용 구조에
따라 표 2.1에 정리하였다. 드룹 제어가 적용된 전원단 전력변환장치의
출력 임피던스는 단일 1차 시스템으로 구성된 경우와 1차 시스템의 합으
로 표현된 경우로 정리가 가능하다. 아래에서는 벅 컨버터를 전원단 전
력변환장치로 사용하여 단일 1차 시스템으로 표현되는 I-V 드룹이 적용
된 출력 임피던스와 1차 시스템의 합으로 표현되는 이중 루프 V-I 드룹
이 적용된 출력 임피던스에 대한 보드 선도를 비교하여, 드룹 제어가 적
용된 전력변환장치의 출력 임피던스 모델링을 수행한다. 그림 2.13-그림

21
2.16의 보드 선도에 사용된 변수는 표 2.2에 나타난다.
그림 2.12 테브닌 등가회로로 치환된 전원단 전력변환장치
표 2.1 드룹 제어에 따른 출력 임피던스 정리
Droop Type Structure Output Impedance, Zo
I-V
Two-loop (General)
1 / ( ) 1 /
1 / 1 /d o cl d
obw bw
d o clbw
o
k H T kZ
s s
k H T
C
Two-loop (Buck-type)
1 / ( )
1 /d cl
obw
d clbw
o
k TZ
s
k T
C
V-I
Two-loop (General)
1 / ( )
1 / 1 /v cl d
obw bw
v clbw
o
H T RZ
s s
H T
C
Single-loop (General) 1 1 /
v do d
v bw
T RZ R
T s
표 2.2 보드 선도에 사용된 벅 컨버터의 파라미터
입력전압 100 V 스위칭 주파수 100 kHz
출력전압 48 V 드룹 저항 Rd 0.64 Ω
필터 인덕터 200 uH 출력 캐패시터 250 uF
전류 보상기 Hi200
(1 )2 500
s
s 전압 보상기 Hv
1000(1 )
2 100
s
s

22
Mag
nitu
de (
dB)
Pha
se (
deg)
그림 2.13 PI 제어기가 적용된 전류 루프 Ti 예시
Mag
nitu
de (
dB)
Pha
se (
deg)
그림 2.14 전류 전달함수와 근사화된 Tcl 비교
23
-50
-40
-30
-20
-10
0
Mag
nitu
de (
dB)
(2.5)(2.14)
100 101 102 103 104 105-90
-45
0
45
Pha
se (
deg)
Bode Diagram
Frequency (Hz)
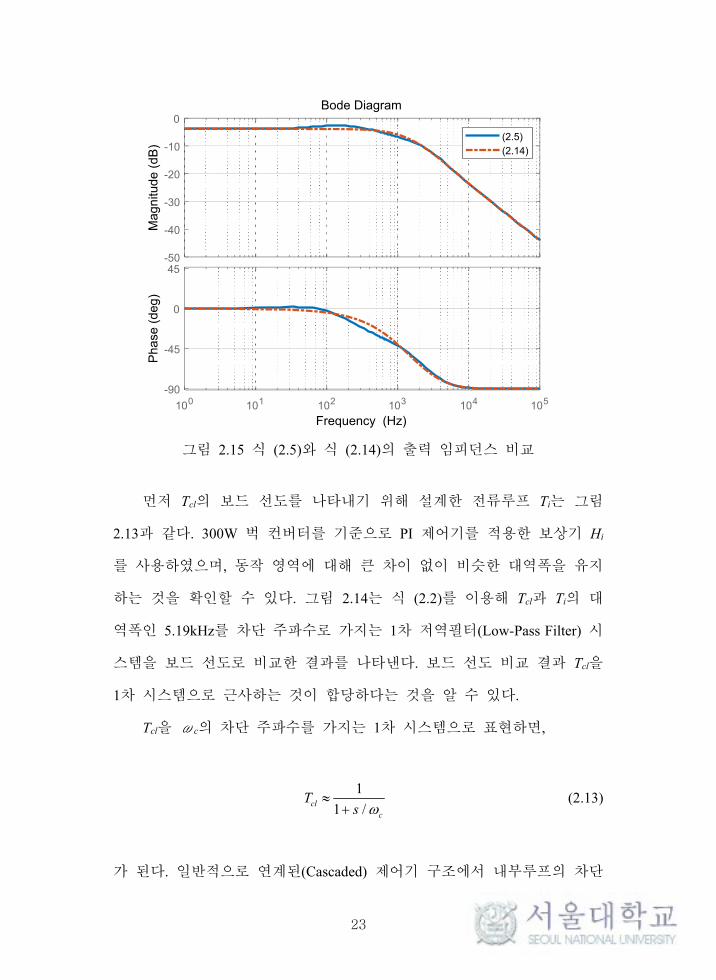
그림 2.15 식 (2.5)와 식 (2.14)의 출력 임피던스 비교
먼저 Tcl의 보드 선도를 나타내기 위해 설계한 전류루프 Ti는 그림
2.13과 같다. 300W 벅 컨버터를 기준으로 PI 제어기를 적용한 보상기 Hi
를 사용하였으며, 동작 영역에 대해 큰 차이 없이 비슷한 대역폭을 유지
하는 것을 확인할 수 있다. 그림 2.14는 식 (2.2)를 이용해 Tcl과 Ti의 대
역폭인 5.19kHz를 차단 주파수로 가지는 1차 저역필터(Low-Pass Filter) 시
스템을 보드 선도로 비교한 결과를 나타낸다. 보드 선도 비교 결과 Tcl을
1차 시스템으로 근사하는 것이 합당하다는 것을 알 수 있다.
Tcl을 ωc의 차단 주파수를 가지는 1차 시스템으로 표현하면,
1
1clc
Ts
(2.13)
가 된다. 일반적으로 연계된(Cascaded) 제어기 구조에서 내부루프의 차단

24
주파수인 ωc가 외부 루프의 드룹 전압 제어기의 제어 대역폭 ωbw보다
크게 설계된다. 따라서 출력 임피던스인 식 (2.5)는
1 /
1 / 1 /d d
obw bw
dbw
o
k RZ
s s
k
C
(2.14)
와 같이 표현이 가능하다. 즉, 출력 임피던스 Zo는 드룹 저항 Rd를 크기
로 가지는 1차 저역필터 시스템으로 표현이 될 수 있다. 그림 2.15는 ω
bw가 1kHz로 설계된 경우 식 (2.5)의 실제 출력 임피던스와 식 (2.14)의
출력 임피던스를 비교한 보드 선도를 나타낸다. 보드 선도 결과 I-V 드
룹 제어가 적용된 전원단 출력 임피던스를 식 (2.14)와 같이 표현할 수
있음을 알 수 있다.
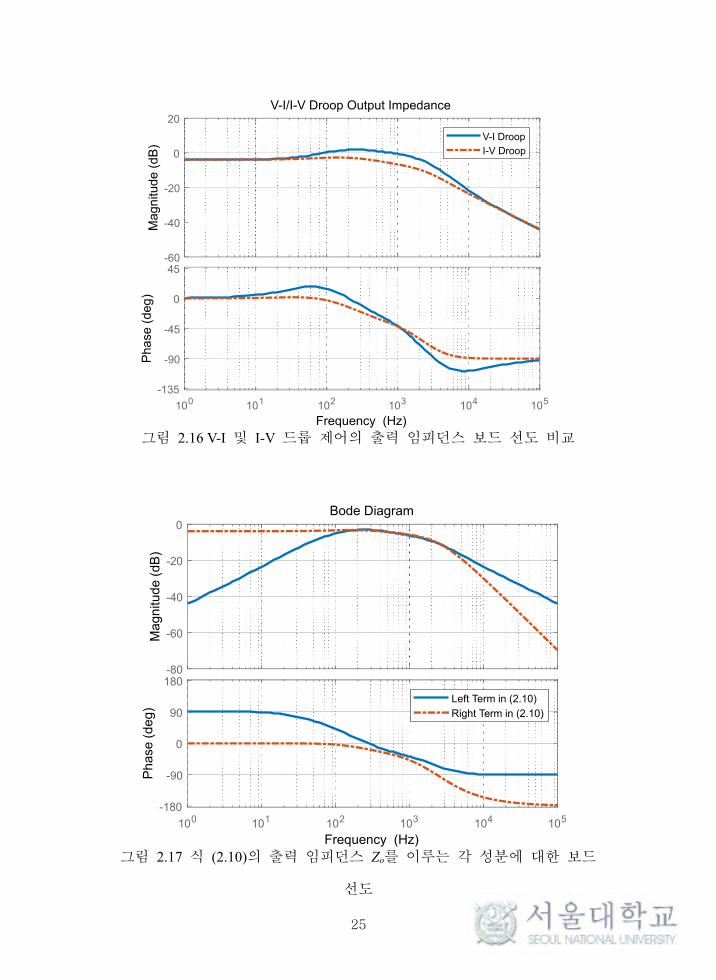
다음으로 V-I 드룹 제어기의 출력 임피던스 보드 선도를 나타내기
위해, I-V 드룹 제어기의 드룹 전압 제어 대역폭인 1kHz와 동일한 대역
폭을 만드는 전압 보상기 Hv를 V-I 드룹 제어기에 적용하였다. 전압 보
상기 Hv는 PI 제어기를 사용하였으며, 식 (2.9)에 따라 나타낸 출력 임피
던스와 그림 2.15에 나타난 I-V 드룹 제어기가 적용된 출력 임피던스의
결과를 비교하여 그림 2.16에 나타낸다.
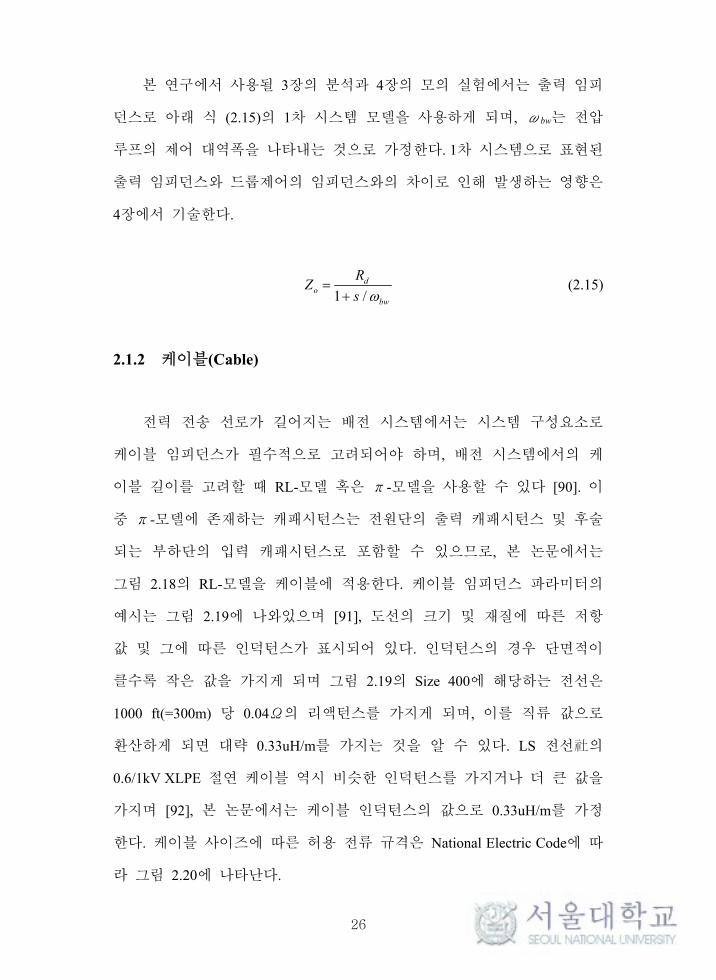
V-I 드룹 제어의 출력 임피던스는 1차 시스템과 차이를 나타내며,
이 결과는 출력 임피던스가 두 1차 시스템의 합으로 이루어져 있기 때문
에 발생한다. 식 (2.10)의 왼쪽 성분과 오른쪽 성분을 비교한 결과가 그
림 2.17에 나타나며, 중간 대역폭에서 두 1차 시스템의 비슷한 크기로 인
해 출력 임피던스가 달라지게 된다. 하지만 전체 개형의 전반적인 형태
는 1차 저역통과 필터 시스템의 개형과 유사하다고 할 수 있다.
25
-60
-40
-20
0
20
Mag
nitu
de (
dB)
V-I DroopI-V Droop
100 101 102 103 104 105-135
-90
-45
0
45
Pha
se (
deg)
V-I/I-V Droop Output Impedance
Frequency (Hz) 그림 2.16 V-I 및 I-V 드룹 제어의 출력 임피던스 보드 선도 비교
-80
-60
-40
-20
0
Mag
nitu
de (
dB)
100 101 102 103 104 105-180
-90
0
90
180
Pha
se (
deg)
Left Term in (2.10)Right Term in (2.10)
Bode Diagram
Frequency (Hz) 그림 2.17 식 (2.10)의 출력 임피던스 Zo를 이루는 각 성분에 대한 보드
선도
26
본 연구에서 사용될 3장의 분석과 4장의 모의 실험에서는 출력 임피
던스로 아래 식 (2.15)의 1차 시스템 모델을 사용하게 되며, ωbw는 전압
루프의 제어 대역폭을 나타내는 것으로 가정한다. 1차 시스템으로 표현된
출력 임피던스와 드룹제어의 임피던스와의 차이로 인해 발생하는 영향은
4장에서 기술한다.
1 /d
obw
RZ
s
(2.15)
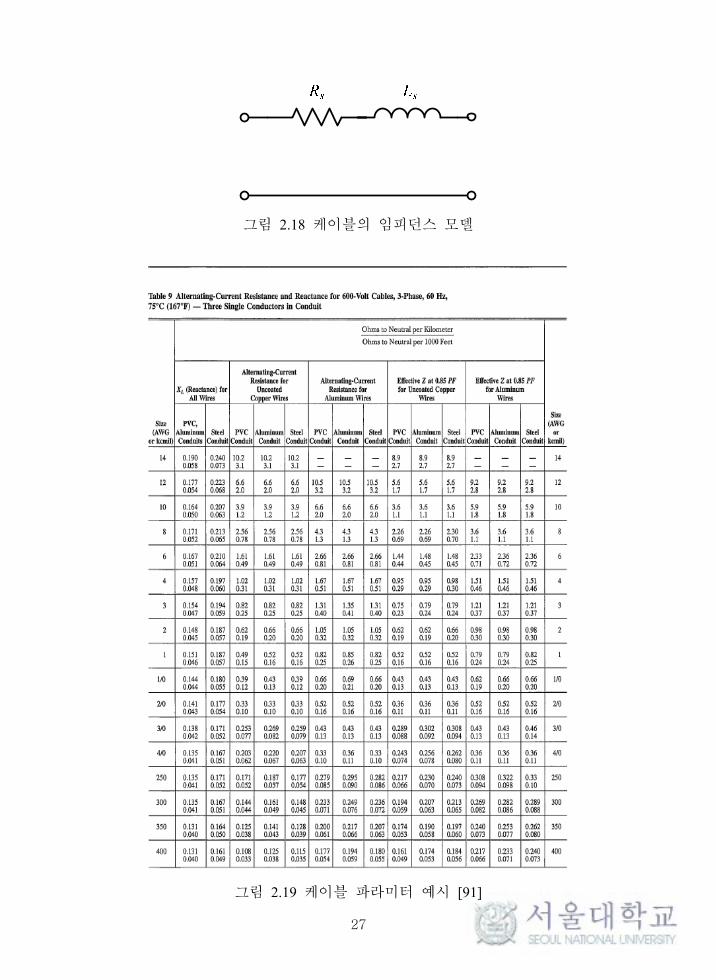
2.1.2 케이블(Cable)
전력 전송 선로가 길어지는 배전 시스템에서는 시스템 구성요소로
케이블 임피던스가 필수적으로 고려되어야 하며, 배전 시스템에서의 케
이블 길이를 고려할 때 RL-모델 혹은 π-모델을 사용할 수 있다 [90]. 이
중 π-모델에 존재하는 캐패시턴스는 전원단의 출력 캐패시턴스 및 후술
되는 부하단의 입력 캐패시턴스로 포함할 수 있으므로, 본 논문에서는
그림 2.18의 RL-모델을 케이블에 적용한다. 케이블 임피던스 파라미터의
예시는 그림 2.19에 나와있으며 [91], 도선의 크기 및 재질에 따른 저항
값 및 그에 따른 인덕턴스가 표시되어 있다. 인덕턴스의 경우 단면적이
클수록 작은 값을 가지게 되며 그림 2.19의 Size 400에 해당하는 전선은
1000 ft(=300m) 당 0.04Ω의 리액턴스를 가지게 되며, 이를 직류 값으로
환산하게 되면 대략 0.33uH/m를 가지는 것을 알 수 있다. LS 전선社의
0.6/1kV XLPE 절연 케이블 역시 비슷한 인덕턴스를 가지거나 더 큰 값을
가지며 [92], 본 논문에서는 케이블 인덕턴스의 값으로 0.33uH/m를 가정
한다. 케이블 사이즈에 따른 허용 전류 규격은 National Electric Code에 따
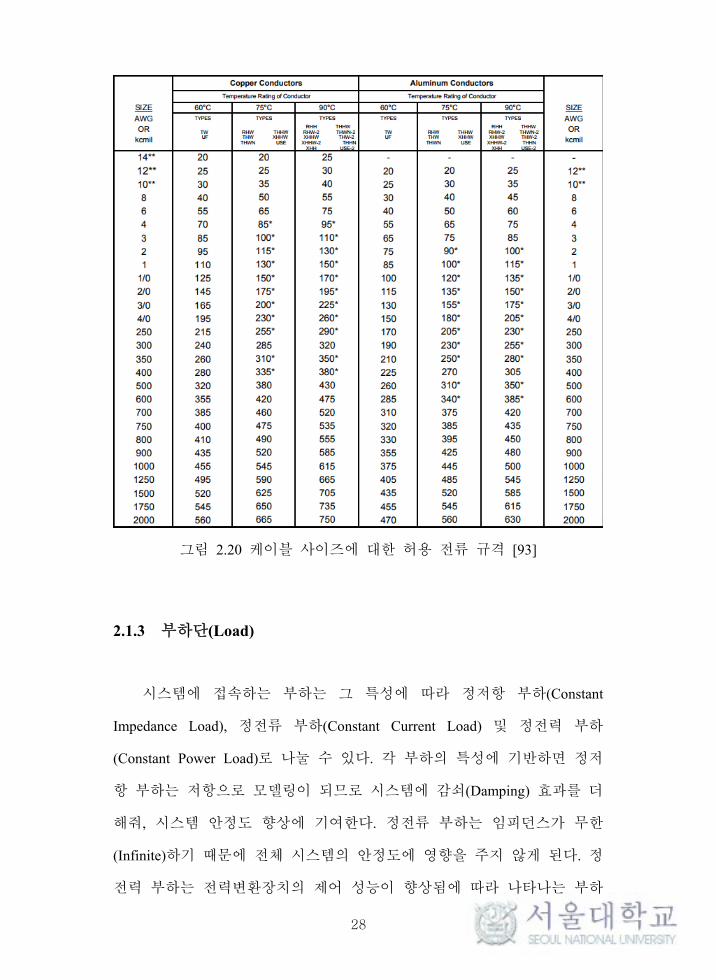
라 그림 2.20에 나타난다.
27
그림 2.18 케이블의 임피던스 모델
그림 2.19 케이블 파라미터 예시 [91]
28
그림 2.20 케이블 사이즈에 대한 허용 전류 규격 [93]
2.1.3 부하단(Load)
시스템에 접속하는 부하는 그 특성에 따라 정저항 부하(Constant
Impedance Load), 정전류 부하(Constant Current Load) 및 정전력 부하
(Constant Power Load)로 나눌 수 있다. 각 부하의 특성에 기반하면 정저
항 부하는 저항으로 모델링이 되므로 시스템에 감쇠(Damping) 효과를 더
해줘, 시스템 안정도 향상에 기여한다. 정전류 부하는 임피던스가 무한
(Infinite)하기 때문에 전체 시스템의 안정도에 영향을 주지 않게 된다. 정
전력 부하는 전력변환장치의 제어 성능이 향상됨에 따라 나타나는 부하

29
의 특성으로, 전력변환장치의 출력 성분(전압, 속도 등)에 대한 제어가
이루어지면 입력 전압 Vin과 입력 전류 Iin의 곱이 일정하게 제어 된다.
소신호 분석에 기반하는 임피던스 모델로 전력 변환장치의 입력 임피던
스 Zin을 표현하면,
2
in in in
in inin in
in in
P I V
V PZ R
I V
(2.16)
과 같이 입력 임피던스는 음의 저항(Negative Incremental Resistance, NIR)
으로 모델링이 된다. 음의 저항은 동작 영역에 따라 다른 값을 가지게
되며, 실제 컨버터의 입력 임피던스에 대한 보드 선도인 그림 2.21에서
위상이 -180도로 나타난 것과 부하에 따른 보드선도의 크기를 통해 확인
할 수 있다. 음의 저항은 앞선 정전력 부하와 정전류 부하와 달리 시스
템의 감쇠를 줄여 불안정한 시스템을 만들 수 있기 때문에, 시스템의 안
정도를 고려할 때는 정전력 부하로 인한 영향이 매우 중요하다. 따라서
본 논문에서 지칭하는 부하는 정전력 부하를 가정한다.
정전력 부하는 전력변환장치의 전압 제어 대역폭 내에서만 정전력
특성을 유지할 수 있기 때문에 그림 2.21에서 위상은 주파수가 상승함에
따라 점점 증가하며 음의 저항 특성에서 벗어나게 된다. 하지만 배전 시
스템에서의 부하는 알 수 없는 것(Unknown)이기 때문에, worst-case를 고
려하여 정전력 부하는 주파수 성분 없이 상수 값을 가지는 음의 저항으
로 모델링한다.
본 논문에서 직류 배전 시스템에는 별도의 버스 캐패시터가 존재하
지 않는다. 대신 음의 저항으로 모델링되는 전력변환장치에 병렬로 부하
단 캐패시터가 연결되어 부하단을 구성한다. 따라서 부하단의 모델링은

30
그림 2.22과 같이 캐패시터와 음의 저항인 부하로 병렬 구성된다.
M
agn
itude
(dB
)P
hase
(de
g)
그림 2.21 정전력 부하의 입력 임피던스 보드 선도
CL -RL
그림 2.22 소신호 기반의 임피던스 모델링을 통한 부하단의 모델

31
2.2 임피던스 기반 전압 안정도 해석
2
1
AA
A
VF
V 2
1
BB
B
VF
V
그림 2.23 서브 시스템에 대한 임피던스 판별법
임피던스 판별법은 전력변환장치로 구성된 직류 시스템의 전압
안정도를 판단하는 일반적인 방법이다. 그림 2.23의 시스템에서 전원단
서브시스템(Source Subsystem)과 부하단 서브시스템(Load Subsystem)의
무부하 전압 전달함수를 각각 FA와 FB로 정의하며, 독립적으로 안정하며
잘 설계가 되어 있는 상황에서, 전체 시스템의 전압 전달함수는
2
1 11
B A B A BAB
bA m
l
V F F F FF
ZV TZ
(2.5)
로 표현된다. 여기서 Zb는 전원단 서브시스템의 출력 임피던스, Zl는 부하
단 서브시스템의 입력 임피던스를 나타내며, Tm은 system loop gain으로 정
의되며 두 서브시스템 사이의 부하 효과(Loading Effect)를 나타낸다. 나이
퀴스트 판별법에 의해 Tm이 (-1,0)을 감싸지 않는다면 전체 시스템은 안
정한 상태가 된다.
나이퀴스트 조건을 기반으로 [40]에서는
1l b mZ Z T (2.6)

32
를 안정도 판별법으로 제시한다. 해당 방법은 모든 주파수 대역에서 출
력 임피던스와 입력 임피던스를 분리 해 놓는 방법으로 이 경우 시스템
의 전압 안정도는 개별 서브시스템의 안정도에만 의존한다. 임피던스의
크기라는 값을 통해 정량화된 설계 조건을 간단하게 제시할 수 있지만,
많은 경우에 두 서브시스템 사이의 임피던스의 차이를 크게 설계하는 것
은 어려운 일이다. 또한 (2.6)의 조건이 강력하게 지켜지지 않는다는 것
이 시스템의 불안정으로 이어지는 것은 아니며, [41]의 적용이 컨버터 내
부의 Input filter와 컨버터간의 안정도 확보 및 동특성에 대한 간섭을 배
제하는 목적으로 나온 것인 만큼 배전 시스템의 설계 기준으로 적용하기
에는 어려운 점이 존재한다.
이를 보완하기 위해 [42-49]에서는 금지 영역(Forbidden Zone)에 기반
을 둔 임피던스 판별법을 제시한다. 이 방법은 복소평면 상에서 (-1,0)을
포함하는 금지 영역을 설정하고, 이 영역을 피해가는 조건을 부하의 설
계 조건으로 제공한다. 참고문헌 [42]에서는 그림 2.24의 금지영역을 지
정하여 해당 영역에 대응하는 임피던스 조건인 식 (2.7)을 부하 설계 조
건으로 제시한다.
1 2 1,2
[ ], 6
180 180 , 60
b l
o o ob l
Z Z GM dB GM
PM Z Z PM PM
(2.7)
여기서 GM은 이득 여유(Gain Margin), PM은 위상 여유(Phase Margin)을
의미한다.
그림 2.25는 식 (2.7)에 대응하는 임피던스 영역을 보드 선도로 표현
한 것으로 주어진 금지 영역을 피해 부하의 임피던스를 설계하는 것으로
안정도를 만족시킬 수 있다. 다른 방법들도 그림 2.26과 같이 다양한 금
지 영역을 통한 안정도 판별을 제시한다 [40]. 하지만 기존의 방법들은

33
고정된 전원단 서브시스템을 통해 부하 서브시스템에 대한 기준을 제공
하기 때문에 전원단의 탈/부착이 가능한 배전 시스템에서 전원단 서브시
스템의 임피던스가 변화하는 경우에 대해서는 설계에 대한 고려가 되지
않았다. 또한 제시된 금지 영역 기반의 설계를 정형화한 식 (2.7)을 설계
조건으로 제시하기에는 지나치게 복잡해 질 수 있다는 한계가 존재한다.
10.5
ForbiddenZone
그림 2.24 [42]에서 제안하는 금지 영역의 복소평면

34
-10
-20
-30
-40
-50
|Zl|
Gain Limit
100
0
-100
100 1000 10000 100000
Frequency [Hz]
Unacceptable phase band
Unacceptable phase bandlZ
그림 2.25 임피던스로 표현된 [42]의 금지영역
그림 2.26 다양한 금지영역을 통한 안정도 판별법 [40]
35
제 3 장 대역폭 해석에 기반한 시스템 안정도
분석 및 설계 방안
임피던스를 통한 시스템의 전압 안정도 해석에서는 임의의 지점을
기준으로 출력 임피던스와 입력 임피던스를 비교한다. 본 논문에서는 임
의의 지점을 공통 연결점으로 설정해 좌측을 버스의 출력 임피던스, 우
측을 부하단의 입력 임피던스로 분리한다. 먼저 나이퀴스트 안정도 판별
법과 보드 선도를 통한 안정도 판별법에 대해 설명한다. 그 후, 버스와
부하단의 대역폭을 정의하고 대역폭과 전압 안정도 사이의 기본적인 관
계를 분석한다. 다중 전원단 시스템으로 이루어진 버스의 대역폭과 다중
부하단으로 이루어진 시스템의 대역폭에 대해 연구한다. 이를 기반으로
직류 배전 시스템의 설계 방안에 대해 제안한다.
3.1 나이퀴스트 안정도 판별법
본 절에서는 본 장의 분석에서 사용하게 될 나이퀴스트 안정도 판별
법과 보드 선도를 통한 안정도 판별 방법에 대해 소개한다.
나이퀴스트 판별법은 개루프(Open Loop) 시스템의 주파수 응답과 개
루프 극점(Pole)들로부터 폐루프(Closed Loop) 시스템의 안정도를 결정하
는 방법이다 [94]. 그림 2.23의 직렬 연결된 서브 시스템에서 전원단이
무부하 상태에서 안정하며, 부하단에 이상적인 전압원을 연결한 경우 시
스템이 안정하다고 가정한다. 즉, 개별적인 시스템이 안정한 상황에서 전
원단의 출력 임피던스 Zb와 부하단의 입력 임피던스 Zl이 각각 아래와
같이 표현된다.
36
(1 / )
(1 / )
b b b
ll
l
Z R s
RZ
s
(3.1)
식 (3.1)은 후술할 버스 임피던스와 부하단의 임피던스의 형태에 해당한
다.
앞서 정의한 것과 같이 system loop gain Tm을 Zb/Zl로 정의하면, 통합
시스템이 안정하기 위해서는 식 (2.5)에서 유도한 것과 같이 시스템의 특
성 방정식(Characteristics Equation)인
1 0mT (3.2)
의 모든 근이 s평면 왼쪽 반평면에 위치해야 한다. 여기서 개루프 시스
템의 주파수 응답인 Tm에 나이퀴스트 판별법을 적용하기 위한 전제로 s
가 무한대로 발산할 때, Tm의 극한값이 0 또는 상수값으로 수렴해야 한
다. 하지만 현재 Tm의 극한값은
lim lim lim[ (1 )(1 )]b bms s s
l l b l
Z R s sT
Z R
(3.3)
가 되기 때문에, 나이퀴스트 판별법을 적용하기 위한 전제를 만족시키지
않는다. 한편 Rb와 Rl이 0이 아니라면, 식 (3.1)에서 보는 것처럼 Zb와 Zl
역시 0이 될 수 없기 때문에 식 (3.2)는
1 0
0
1 (1 / ) 0
m
b l
m
T
Z Z
T
(3.4)

37
와 같이 나타낼 수 있다. 즉, 식 (3.4)에 해당하는 특성 방정식이 모두 동
일한 해를 가지게 된다. 따라서, 나이퀴스트 판별법의 전제 조건인 극한
값의 수렴성을 만족하는
11 0
mT (3.5)
을 사용하여 나이퀴스트 판별법을 적용한다. 이 때의 개루프 시스템 주
파수 응답은 1/Tm인 Zl/Zb가 된다.
나이퀴스트 판별 방법은 다음과 같이 표현될 수 있다.
Z N P (3.6)
여기서 Z는 s평면의 오른쪽 반평면에 존재하는 1+(1/Tm)의 영점의 개수,
N은 (-1,0)을 시계방향으로 감싸는 횟수, 그리고 P는 s평면의 오른쪽 반
평면에 존재하는 (1/Tm)의 극점의 개수를 의미한다. 시스템이 안정하기
위해서는 Z=0이 되어야 하므로 시스템이 안정하기 위한 조건은
N P (3.7)
가 된다. 개루프 시스템 주파수 응답인 1/Tm에서
1
(1 )(1 / )l l
m b b l b
Z R
T Z R s s
(3.8)
P=1이 된다. 따라서, 식 (3.1)로 주어진 시스템이 안정하기 위해서는 나
이퀴스트 선도가 (-1,0)을 반시계 방향으로 한번 감싸야 한다.

38
Rl
Rb
Zb
Zl
1l
b
Z
Z
-180o
-90o
0o
45o
90o
-135o
mφ
그림 3.1 보드 선도에서 표현되는 위상
1A
m
-1
B1
A
m
-1B
(a) (b)
그림 3.2 위상 차이에 따른 나이퀴스트 선도 개형
(a) -180o보다 큰 경우 (b) -180o보다 작은 경우
39
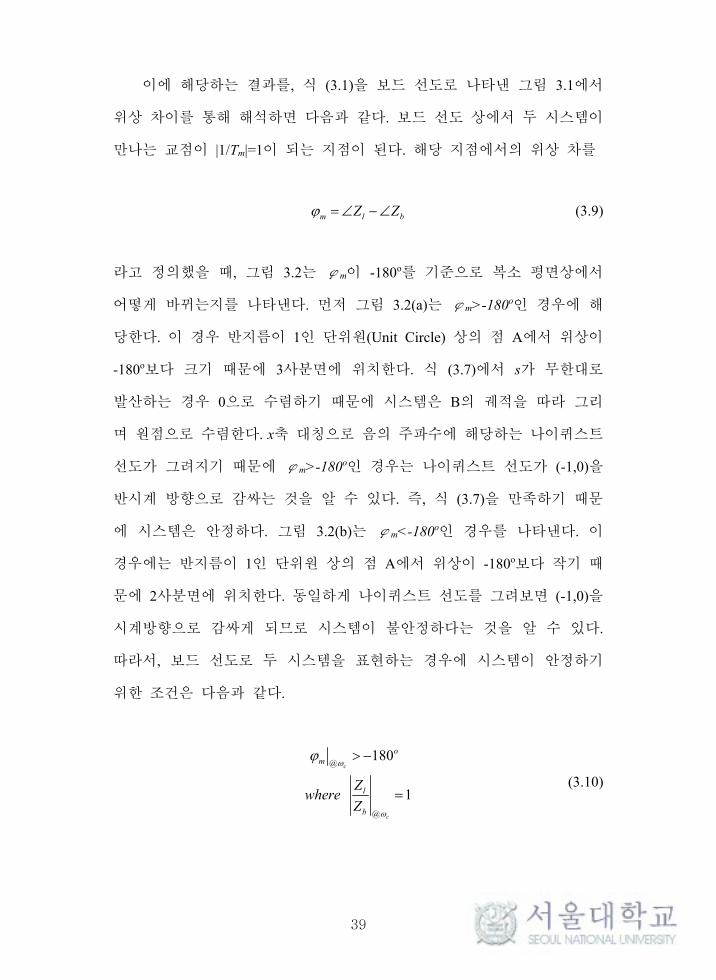
이에 해당하는 결과를, 식 (3.1)을 보드 선도로 나타낸 그림 3.1에서
위상 차이를 통해 해석하면 다음과 같다. 보드 선도 상에서 두 시스템이
만나는 교점이 |1/Tm|=1이 되는 지점이 된다. 해당 지점에서의 위상 차를
m l bZ Z (3.9)
라고 정의했을 때, 그림 3.2는 φm이 -180o를 기준으로 복소 평면상에서
어떻게 바뀌는지를 나타낸다. 먼저 그림 3.2(a)는 φm>-180o인 경우에 해
당한다. 이 경우 반지름이 1인 단위원(Unit Circle) 상의 점 A에서 위상이
-180o보다 크기 때문에 3사분면에 위치한다. 식 (3.7)에서 s가 무한대로
발산하는 경우 0으로 수렴하기 때문에 시스템은 B의 궤적을 따라 그리
며 원점으로 수렴한다. x축 대칭으로 음의 주파수에 해당하는 나이퀴스트
선도가 그려지기 때문에 φm>-180o인 경우는 나이퀴스트 선도가 (-1,0)을
반시계 방향으로 감싸는 것을 알 수 있다. 즉, 식 (3.7)을 만족하기 때문
에 시스템은 안정하다. 그림 3.2(b)는 φm<-180o인 경우를 나타낸다. 이
경우에는 반지름이 1인 단위원 상의 점 A에서 위상이 -180o보다 작기 때
문에 2사분면에 위치한다. 동일하게 나이퀴스트 선도를 그려보면 (-1,0)을
시계방향으로 감싸게 되므로 시스템이 불안정하다는 것을 알 수 있다.
따라서, 보드 선도로 두 시스템을 표현하는 경우에 시스템이 안정하기
위한 조건은 다음과 같다.
@
@
180
1
c
c
om
l
b
Zwhere
Z
(3.10)

40
3.2 대역폭과 전압 안정도
3.2.1 버스 임피던스와 대역폭
그림 3.3 공통 연결점에서 바라본 버스 임피던스의 구성
그림 3.3은 각각 그림 2.12와 그림 2.18로 표현된 전원단 컨버터와
케이블의 합으로 구성된 버스를 나타낸다. 드룹 제어가 적용된 경우에
해당하는 버스 임피던스(Zb)는 2장에서 모델링 한 것과 같이 식 (3.11)으
로 나타난다. 본 절에서는 380V/100kW에 해당하는 전원단 컨버터가 있
는 경우를 바탕으로 분석을 진행한다. 400V를 기준으로 드룹 전압으로
인한 전압 강하를 5%로 가정하였으며, 허용 전류를 기준으로 그림 2.19
및 그림 2.20를 바탕으로 400-500 kcmil의 도선을 바탕으로 하였다. 전체
케이블 길이 300m를 대상으로 할 때, 분석에 사용된 파라미터는 Rd=0.2
Ω, fbw=300Hz, Rs=30mΩ, Ls=100μH으로 정리되며, 그림 3.4는 버스 임피
던스의 보드 선도를 나타낸다.
1 /d
b s sbw
RZ R sL
s
(3.11)
본 장의 분석에서 사용된 전원단 시뮬레이션 회로도는 그림 2.6과 같으
며, 대역폭 분석을 위해 Tcl=1이라고 가정하였다.
41
-20
-10
0
10
20
Mag
nitu
de (
dB)
ZbZb with Zo=Rd
101 102 103 1040
45
90
Pha
se (
deg)
Bode Diagram
Frequency (Hz) 그림 3.4 버스 임피던스의 보드 선도
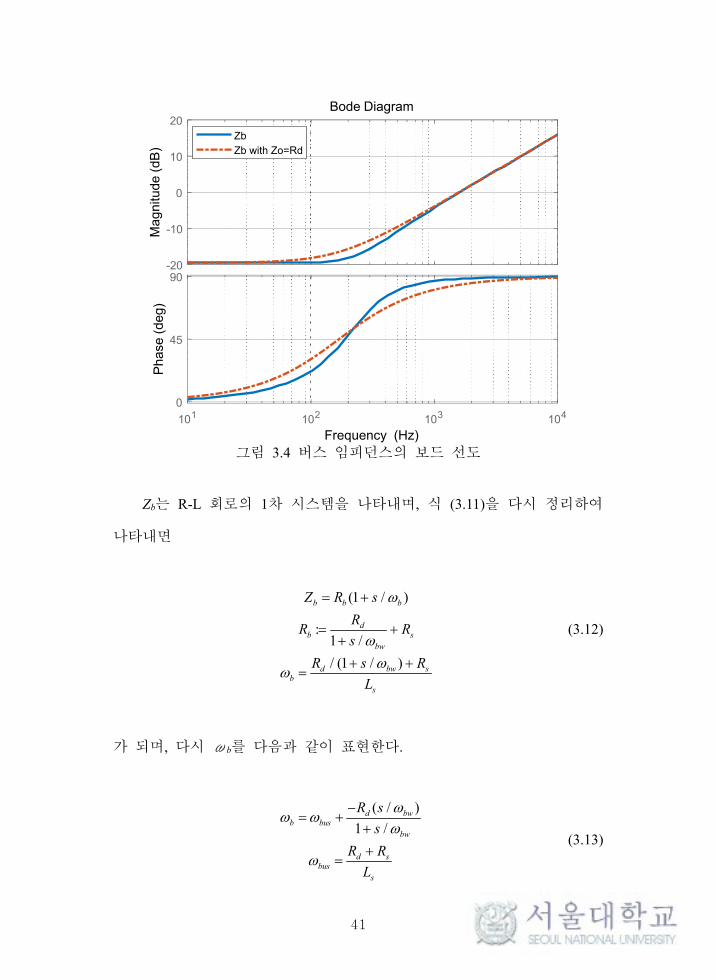
Zb는 R-L 회로의 1차 시스템을 나타내며, 식 (3.11)을 다시 정리하여
나타내면
(1 / )
:1 /
/ (1 / )
b b b
db s
bw
d bw sb
s
Z R s
RR R
s
R s R
L
(3.12)
가 되며, 다시 ωb를 다음과 같이 표현한다.
( / )
1 /d bw
b busbw
d sbus
s
R s
s
R R
L
(3.13)

42
여기서 ωb는 Zb의 영점으로 시스템의 대역폭에 해당하는 파라미터이다.
서론에서 소개한 것처럼 통과 필터의 대역폭을 본 연구에서 활용하게 되
며 그에 따라 ωb는 버스의 대역폭으로 정의된다. 하지만 ωbw로 인해 ω
b가 주파수에 따라 변하게 되므로 일정한 값으로 표현하기가 어려운 문
제가 있다. 따라서 식 (3.13)와 같이 ωb를 상수 성분에 해당하는 ωbus와
ωbw로 이루어진 주파수에 의존하는 성분으로 분리한다. 그리고 ωbus를
버스의 대역폭인 ωb를 나타내는 상수 값으로 정의한다. 아래 내용에서
는 편의를 위해 대역폭을 지칭하는 경우에 각 주파수와 주파수를 호환하
여 표시하기로 한다 (ωbus↔fbus).
1차 시스템에서의 대역폭은 통과 주파수의 범위를 나타내며, 식
(3.12)의 통과 성분은 저항으로 지칭한다. 따라서 버스는 fbus까지 저항의
성격을 나타내는 것으로 이해할 수 있다. 본 논문에서는 전원단 컨버터
의 제어 대역폭(fbw)과 함께 fbus와 fbw를 버스의 특징으로 정의한다.
한편 Zo에 존재하는 fbw로 인해 나타나는 Zb의 보드 선도는 저항이
고정되어 있는 1차 시스템과 비교 했을 때 차이가 존재한다. 그림 3.4에
서 버스 임피던스의 보드 선도(실선)와 Zo가 Rd로 고정되어 있는 1차 시
스템의 보드 선도(점선)을 비교했을 때, 대략 fbus를 기점으로 낮은 주파
수에서는 파라미터가 고정된 1차 시스템에 비해 버스 임피던스의 위상이
천천히 상승하고 높은 주파수에서는 위상이 더 빠르게 상승한다는 것을
알 수 있다. 이러한 특징은 fbus<<fbw로 갈수록 점점 사라져 Zb는 실제 1차
시스템과 동일해지게 된다.
전원단 컨버터의 드룹 저항 Rd와 제어 대역폭 fbw는 버스 임피던스에
영향을 준다. 그림 3.5와 그림 3.6은 Rd와 fbw에 따른 Zb의 보드 선도를
나타낸다. Rd가 감소하면 식 (3.13)에 따라 fbus가 줄어들게 되며, 대역폭이
줄어들게 된다. 즉, 통과 주파수의 범위가 감소하므로 버스가 저항으로
보이는 주파수 대역이 좁아진다. fbw가 감소하면 식 (3.13)에서 정의된 fbus

43
에는 영향을 주지 않지만, 식 (3.12)에 나와있는 Zb의 영점에 영향을 주
게 된다. Rd가 저항으로 보이는 주파수 범위가 줄어들기 때문에 유효 저
항이 감소해 Zb의 위상 특성이 그림 3.6과 같이 변하게 된다.
-30
-20
-10
0
10
20
Rd2Rd0.5Rd
100 101 102 103 1040
45
90
Bode Diagram
Frequency (Hz) 그림 3.5 드룹 저항에 따른 버스 임피던스의 보드 선도
-30
-20
-10
0
10
20
Mag
nitu
de (
dB)
101 102 103 1040
45
90
Pha
se (
deg)
fbw
2fbw
0.5fbw
Bode Diagram
Frequency (Hz) 그림 3.6 전원단 차단 주파수에 따른 버스 임피던스의 보드 선도

44
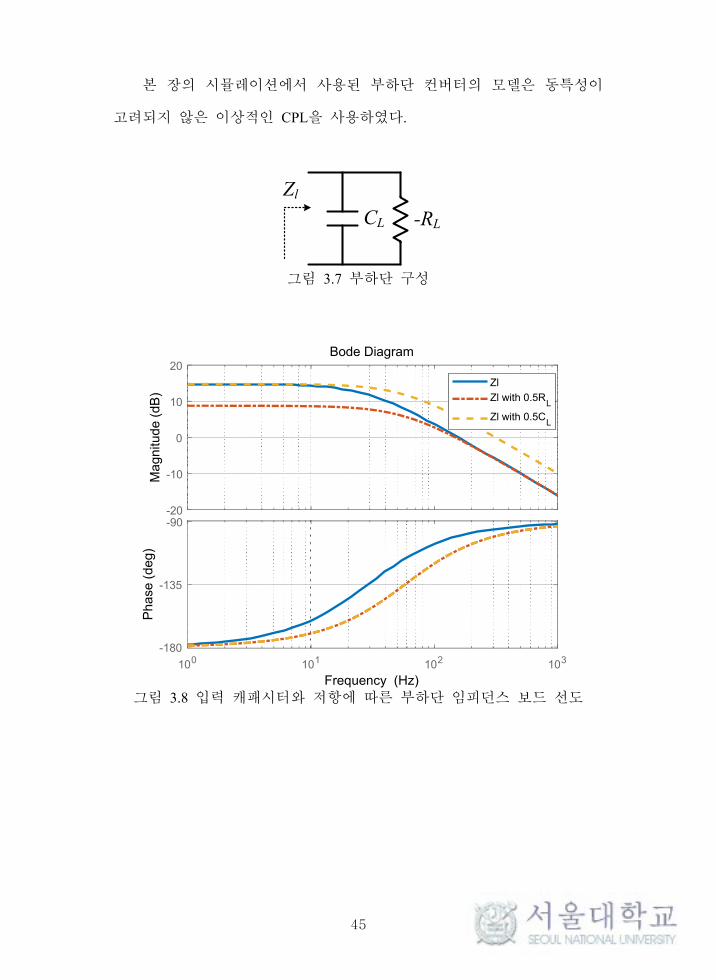
3.2.2 부하단 임피던스와 대역폭
2장에서 모델링 결과로 부하단은 그림 3.7과 같이 부하 캐패시터와
이상적인 CPL로 모델링되는 컨버터로 구성되며, 입력 임피던스는 식
(3.14)로 표현된다.
1L
lL L
RZ
sC R
(3.14)
식 (3.14)은 부하단 임피던스 Zl을 나타내며 우반면에 극점이 하나
있는 1차 저역 통과필터 시스템으로 표현된다. 버스에서와 마찬가지로
식 (3.11)은
1 /
1
Ll
load
loadL L
RZ
s
R C
(3.15)
와 같이 나타낼 수 있으며, fload를 부하단의 대역폭으로 정의한다. 부하단
은 fload의 대역폭까지 음의 저항에 해당하는 특징을 지니는 것으로 이해
할 수 있다.
그림 3.8은 CL=1mF, RL=5.48Ω인 상태에서 부하 캐패시터와 저항의
크기가 변하는 경우 임피던스 보드 선도를 나타낸다. 대역폭이 클수록
음의 저항이 넓은 주파수 범위에서 보이게 된다. 본 논문에서는 부하 컨
버터를 이상적인 CPL로 가정하여 모든 주파수에서 동일한 값을 가지는
저항으로 가정하므로, 버스 임피던스와 달리 부하단 임피던스의 위상 변
화 양상은 1차 시스템의 위상 변화와 동일한 모습을 보인다.
45
본 장의 시뮬레이션에서 사용된 부하단 컨버터의 모델은 동특성이
고려되지 않은 이상적인 CPL을 사용하였다.
CL -RL
Zl
그림 3.7 부하단 구성
-20
-10
0
10
20
Mag
nitu
de (
dB)
Zl
Zl with 0.5RL
Zl with 0.5CL
100 101 102 103-180
-135
-90
Pha
se (
deg)
Bode Diagram
Frequency (Hz) 그림 3.8 입력 캐패시터와 저항에 따른 부하단 임피던스 보드 선도

46
3.2.3 대역폭과 전압 안정도
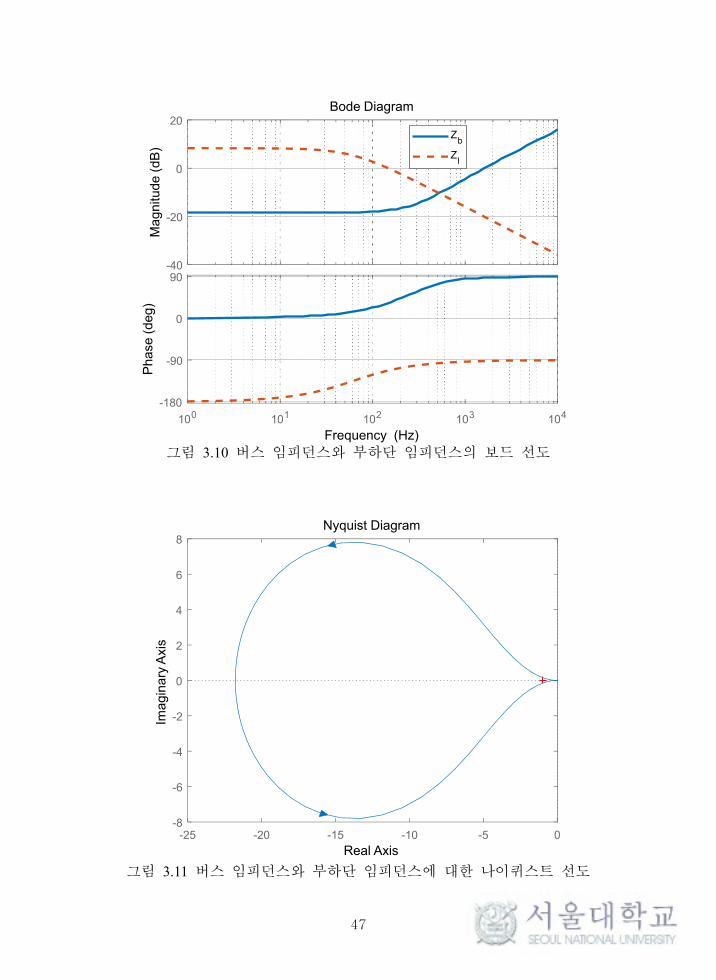
그림 3.9 단일 전원의 버스와 부하단으로 구성된 시스템
본 절에서는 버스와 부하단에 대해 정의된 대역폭 값과 시스템 안정
도 사이의 관계에 대해서 기술한다. 버스와 부하단의 대역폭을 변화시켜
가면서 시스템 안정도가 어떻게 바뀌는지 살펴보고, 대역폭과 전압 안정
도 사이의 관계식에 대해 유도한다.
그림 3.9는 버스와 부하가 결합된 시스템으로 파라미터는 3.2.1절과
3.2.2절에 사용한 값이며, 전압 안정도를 판별하기 위해 Zb와 Zl의 보드
선도 및 나이퀴스트 선도를 도시한 결과는 그림 3.10과 그림 3.11과 같다.
3.1절에서 소개한 것처럼 전압 안정도는 임피던스가 만나는 점에서
의 위상차에 의해 결정된다. 그림 3.10에서 현재 두 임피던스 보드 선도
가 만나는 점에서의 Zl 위상은 -90o에 가까우며, Zb는 90o에서 조금의 여
유를 지닌다. 따라서 교점에서의 위상차가 -180o보다 크며, 3.1절에서 확
인한 것과 같이 현재 시스템은 안정한 상태가 됨을 알 수 있다. 이 결과
는 그림 3.11의 나이퀴스트 선도 결과에서도 확인할 수 있는데, 현재 반
시계 방향으로 (-1,0)을 한번 감싸고 있으므로 해당 시스템은 안정하다.
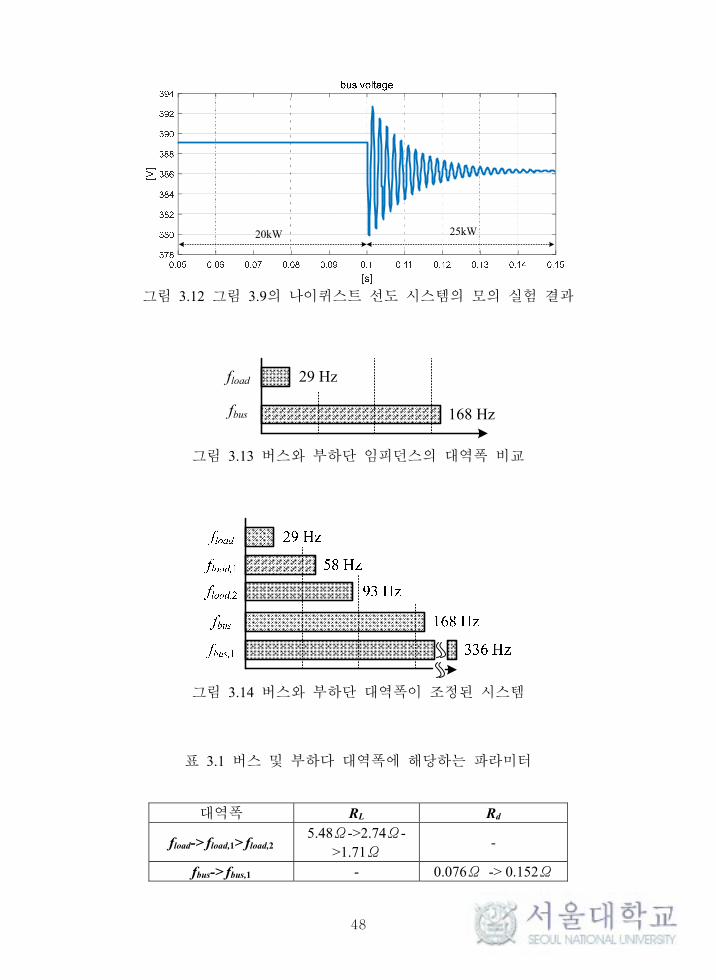
이 시스템에 대한 모의 실험 결과는 그림 3.12에 나와 있으며, 평형상태
에서 RL만큼의 부하 변동이 발생한 후 다시 평형점으로 수렴하는 것을
확인할 수 있다. 이 때, 부하 변동시에 관측되는 전압의 진동(Oscillation)
은 시스템의 댐핑이 부족하다는 의미로 안정성에 대한 여유도(Margin)가
충분하지 않은 상태를 의미한다.
47
-40
-20
0
20
Mag
nitu
de (
dB)
Zb
Zl
100 101 102 103 104-180
-90
0
90
Pha
se (
deg)
Bode Diagram
Frequency (Hz) 그림 3.10 버스 임피던스와 부하단 임피던스의 보드 선도
-25 -20 -15 -10 -5 0-8
-6
-4
-2
0
2
4
6
8Nyquist Diagram
Real Axis
Imag
inar
y A
xis
그림 3.11 버스 임피던스와 부하단 임피던스에 대한 나이퀴스트 선도
48
20kW 25kW
그림 3.12 그림 3.9의 나이퀴스트 선도 시스템의 모의 실험 결과
fbus
fload
168 Hz
29 Hz
그림 3.13 버스와 부하단 임피던스의 대역폭 비교
그림 3.14 버스와 부하단 대역폭이 조정된 시스템
표 3.1 버스 및 부하다 대역폭에 해당하는 파라미터
대역폭 RL Rd
fload-> fload,1> fload,2 5.48Ω->2.74Ω-
>1.71Ω -
fbus-> fbus,1 - 0.076Ω -> 0.152Ω
49
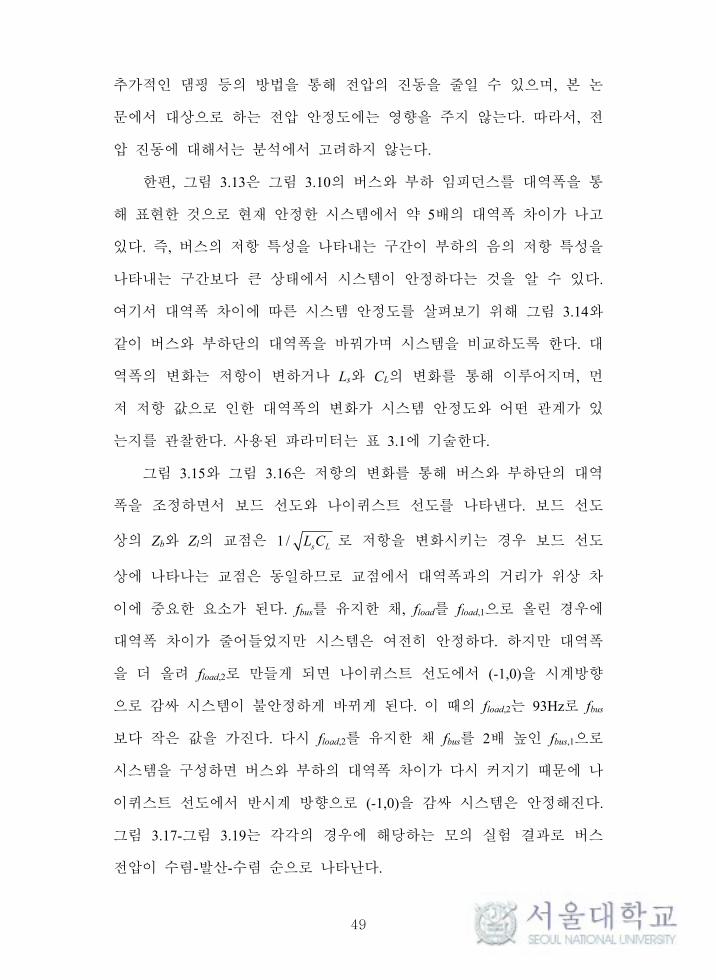
추가적인 댐핑 등의 방법을 통해 전압의 진동을 줄일 수 있으며, 본 논
문에서 대상으로 하는 전압 안정도에는 영향을 주지 않는다. 따라서, 전
압 진동에 대해서는 분석에서 고려하지 않는다.
한편, 그림 3.13은 그림 3.10의 버스와 부하 임피던스를 대역폭을 통
해 표현한 것으로 현재 안정한 시스템에서 약 5배의 대역폭 차이가 나고
있다. 즉, 버스의 저항 특성을 나타내는 구간이 부하의 음의 저항 특성을
나타내는 구간보다 큰 상태에서 시스템이 안정하다는 것을 알 수 있다.
여기서 대역폭 차이에 따른 시스템 안정도를 살펴보기 위해 그림 3.14와
같이 버스와 부하단의 대역폭을 바꿔가며 시스템을 비교하도록 한다. 대
역폭의 변화는 저항이 변하거나 Ls와 CL의 변화를 통해 이루어지며, 먼
저 저항 값으로 인한 대역폭의 변화가 시스템 안정도와 어떤 관계가 있
는지를 관찰한다. 사용된 파라미터는 표 3.1에 기술한다.
그림 3.15와 그림 3.16은 저항의 변화를 통해 버스와 부하단의 대역
폭을 조정하면서 보드 선도와 나이퀴스트 선도를 나타낸다. 보드 선도
상의 Zb와 Zl의 교점은 1 / s LL C 로 저항을 변화시키는 경우 보드 선도
상에 나타나는 교점은 동일하므로 교점에서 대역폭과의 거리가 위상 차
이에 중요한 요소가 된다. fbus를 유지한 채, fload를 fload,1으로 올린 경우에
대역폭 차이가 줄어들었지만 시스템은 여전히 안정하다. 하지만 대역폭
을 더 올려 fload,2로 만들게 되면 나이퀴스트 선도에서 (-1,0)을 시계방향
으로 감싸 시스템이 불안정하게 바뀌게 된다. 이 때의 fload,2는 93Hz로 fbus
보다 작은 값을 가진다. 다시 fload,2를 유지한 채 fbus를 2배 높인 fbus,1으로
시스템을 구성하면 버스와 부하의 대역폭 차이가 다시 커지기 때문에 나
이퀴스트 선도에서 반시계 방향으로 (-1,0)을 감싸 시스템은 안정해진다.
그림 3.17-그림 3.19는 각각의 경우에 해당하는 모의 실험 결과로 버스
전압이 수렴-발산-수렴 순으로 나타난다.

50
-40
-20
0
20Zb(fbus)Zl(fload1)Zl(fload2)Zb(fbus1)
100 101 102 103 104-180
-90
0
90
Bode Diagram
Frequency (Hz)
그림 3.15 버스와 부하단 임피던스의 보드 선도 (fbus, fbus,1, fload, fload,1)
그림 3.16 버스와 부하단 임피던스의 나이퀴스트 선도
(fbus, fbus,1, fload,1, fload,2)
51
40kW 50kW
그림 3.17 fbus와 fload,1을 결합한 시스템의 모의 실험 결과
70kW 80kW
그림 3.18 fbus와 fload,2를 결합한 시스템의 모의 실험 결과
70kW 80kW
그림 3.19 fbus,1와 fload,2를 결합한 시스템의 모의 실험 결과

52
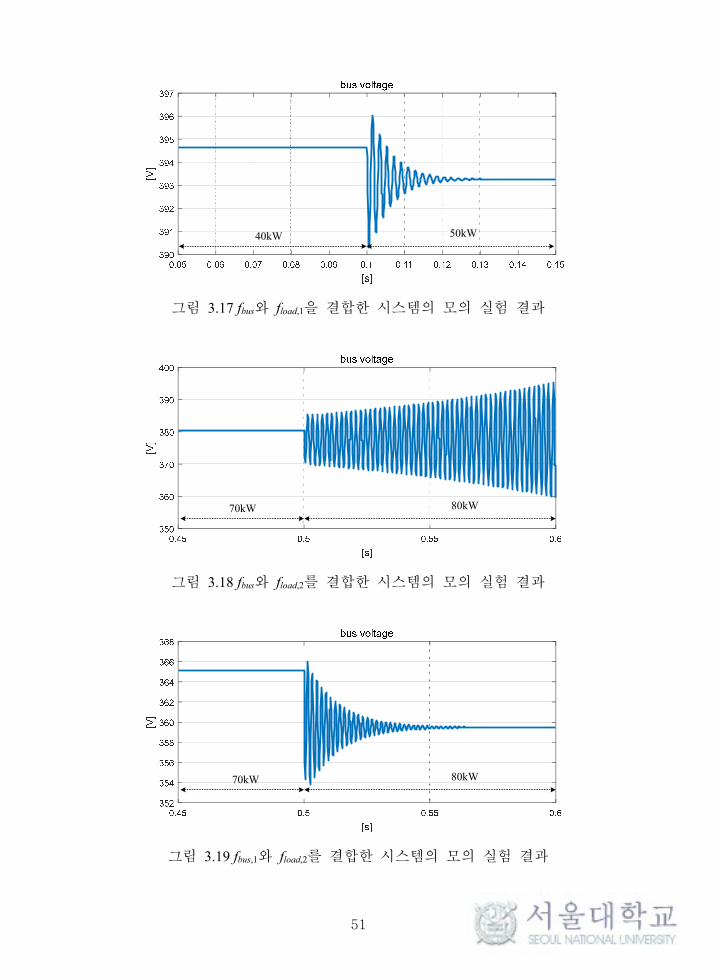
앞선 부하에 따른 대역폭 변동의 결과에서 fbus>fload인 경우에 시스템
이 부분적으로 안정하다는 것을 알 수 있다. 이번에는 Ls와 CL이 변하는
경우 대역폭과 안정도 사이의 관계를 관찰한다. 버스와 부하 대역폭을
각각 fbus와 fload1로 가지는 시스템에 대해 파라미터 구성을 표 3.2와 같이
수정해 보드 선도, 나이퀴스트 선도 결과 및 시뮬레이션 결과를 그림
3.20-그림 3.22에 나타내었다.
표 3.2 fload,1를 구성하는 서로 다른 파라미터
Conv New fload,1 CL=1mF, RL=2.74Ω CL=10uF, RL=274Ω fbus Rd=0.076Ω, fbw=200Hz, Rs=30mΩ, Ls=100uH
-40
-20
0
20
40
60
Mag
nitu
de (
dB)
ZbZl(Conv)Zl(New)
100 101 102 103 104-180
-90
0
90
Pha
se (
deg)
Bode Diagram
Frequency (Hz)
그림 3.20 대역폭이 동일하고 파라미터가 다른 부하단 임피던스와 버스
임피던스의 보드 선도
53
-9 -8 -7 -6 -5 -4 -3 -2 -1 0-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05ConvNew
Nyquist Diagram
Real Axis
Imag
inar
y A
xis
그림 3.21 대역폭이 동일하고 파라미터가 다른 부하단 임피던스와
버스 임피던스에 대한 나이퀴스트 선도 결과
[V]
400 W 500 W
그림 3.22 서로 다른 파라미터의 fload,1의 시뮬레이션 결과

54
fbus
fload
C decrease
L decrease
1
LC
그림 3.23 동일한 버스와 부하단 대역폭에서 교점의 위치
그림 3.23은 버스와 부하단의 대역폭이 동일한 캐패시턴스와 인덕턴
스가 변함에 따라 버스와 부하단의 임피던스가 만나는 점이 바뀌는 것을
나타낸다. 표 3.2의 New에 해당하는 값은 인덕턴스는 동일하지만 캐패시
턴스가 줄어들기 때문에, 새로운 시스템의 교점 fLC는 기존 시스템에 비
해 주파수가 커지게 된다. 이 때, 그림 3.4에서 살펴본 것처럼 전원단 컨
버터의 Rd가 fbw에 의해 주파수가 커질수록 작아지기 때문에 버스 임피던
스의 위상은 실제 1차 시스템보다 대역폭 이후 주파수에서 빠르게 상승
한다. 따라서 기존 경우보다 뒤에서 형성되는 교점에서, 부하 임피던스의
위상 상승 속도보다 버스 임피던스의 위상 상승 속도가 더 크게 나타남
으로 인해 위상 차가 벌어지게 된다. 그 결과 캐패시턴스가 작은 값으로
이루어진 대역폭은 그림 3.21의 나이퀴스트 선도에서 (-1,0)을 시계방향으
로 감싸게 되어 시스템이 불안정해지게 된다. 결국 기본적으로 대역폭
차이에 의해 시스템의 안정도가 결정이 되는 것에 더해, 전원단 컨버터
의 대역폭 fbw와 두 시스템의 교점으로 정의되는 fLC(= 1 / 2 s LL C )가 대
역폭의 안정한 거리를 결정짓는 요소로 영향을 주게 된다.

55
만약 fbw >> fLC 관계가 성립하는 시스템이라면, fLC에서 전원단의 출력
임피던스 Zo는 드룹 저항 Rd로 근사가 가능하다. 따라서 버스와 부하 모
두 이상적인 1차 시스템의 특성을 지니게 된다. 이 경우에 교점에서의
위상을 -180o보다 크게 유지하기 위해서는 버스의 저항 영역이 부하의
저항 영역보다 크면 된다. 따라서 대역폭과 시스템의 안정도 사이에는
다음과 같은 식이 성립한다.
1,
BW LC load b bus
d sload bus
L L s
f f
R R
R C L
(3.16)
여기서 ωbus를 다시 세부적으로 정의하면 다음과 같다.
,
bus source cable
d ssource cable
s s
R R
L L
(3.17)
버스의 대역폭을 나타내는 값 ωbus는 전원단 컨버터의 대역폭 ωsource와
케이블의 대역폭 ωcable의 합으로 구성된다.
fbw >> fLC 관계가 성립하지 않는 경우에는 fLC에서 달라지는 Zo의 크
기를 고려해야 한다. fLC에서의 Zo의 크기는
@2
@
(1 )1 / 1 ( )
LC
LC
d d LCo f
LCbw bwf
bw
R R fZ j
fs ff
(3.18)
가 되며, fLC와 fbw 사이의 거리의 제곱에 반비례하게 저항 값이 줄어들어
나타나는 것을 알 수 있다. 새로운 Zo의 저항 값을ωb에 대입하면
56
2
2
1 ( )1
1 ( )
ds
LC
bwb source cable
LCs
bw
RR
f
ffLf
(3.19)
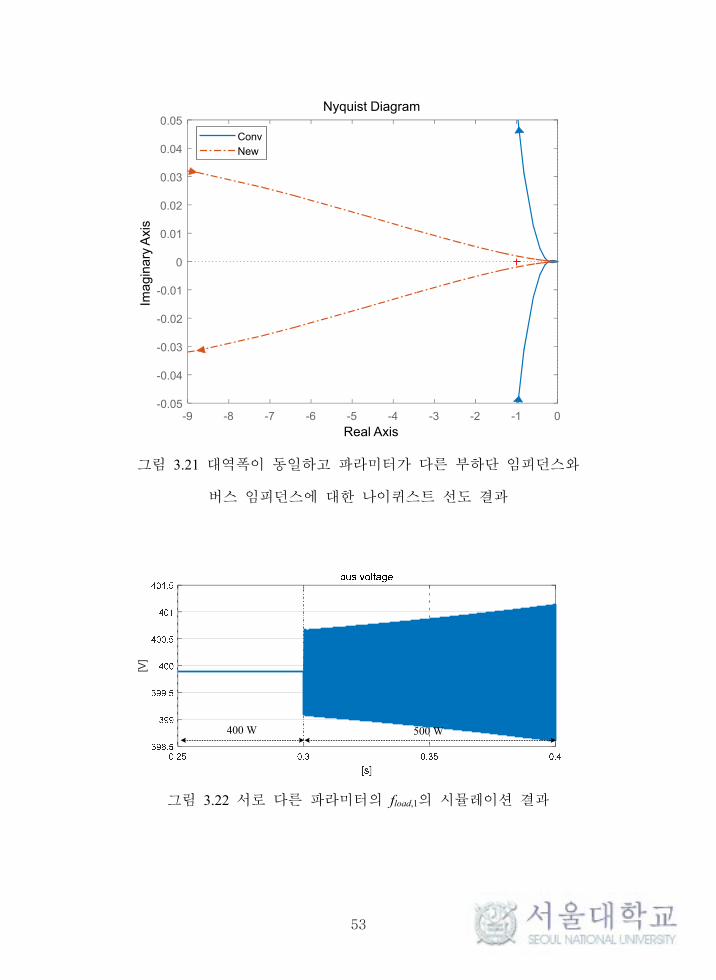
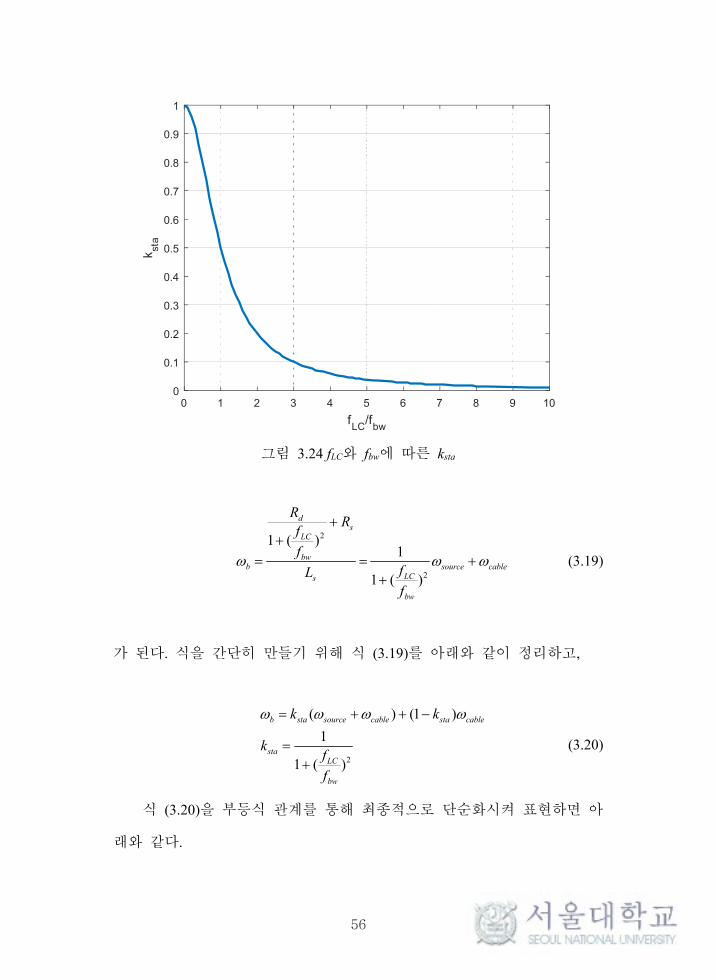
가 된다. 식을 간단히 만들기 위해 식 (3.19)를 아래와 같이 정리하고,
2
( ) (1 )
1
1 ( )
b sta source cable sta cable
staLC
bw
k k
kf
f
(3.20)
식 (3.20)을 부등식 관계를 통해 최종적으로 단순화시켜 표현하면 아
래와 같다.
0 1 2 3 4 5 6 7 8 9 10
fLC
/fbw
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
k sta
그림 3.24 fLC와 fbw에 따른 ksta

57
( ) (1 ) ( )b sta source cable sta cable sta source cable sta busk k k k (3.21)
이 식을 식 (3.16)에 대입하면 일반적으로 대역폭과 시스템 안정도 사이
에는 다음과 같은 식이 성립한다.
load sta busf k f (3.22)
여기서 ksta는 시스템이 안정하기 위해서 필요한 부하 대역폭에 대한 버
스 대역폭의 비율이며, 직류 배전 시스템의 부하단 접속을 위한 설계 기
준이 된다. ksta는 그림 3.24와 같은 값을 지닌다. 식 (3.22)은 식 (3.21)의
근사로 인해 충분 조건에 해당하는 값을 지닌다. 충분 조건의 여유도는
(1-ksta)ωcable 크기에 의해 결정되며 ksta가 작을수록, ωcable이 클수록 설계
의 여유도가 증가하게 된다.
그림 3.25는 대역폭과 전압 안정도 사이의 관계에 대해 정리한다. 단
일 전원단으로 이루어진 버스와 부하단에 대해서 fbw와 fLC 관계에서 유
도된 ksta를 통해 fload<kstafbus의 조건을 만족하도록 시스템을 설계하면 시
스템의 전압 안정도가 보장된다. 해당 조건은 충분조건에 해당한다.
그림 3.25 대역폭과 전압 안정도

58
표 3.3 대역폭과 안정도 관계 검증을 위한 예제
Case
Parameter 167 , 47 , 1 , 2 , 0.2bus cable bw LC staf Hz f Hz f kHz f kHz k
Condition 1: 0.2
2 : 0.5load bus
load bus
Cond f f
Cond f f
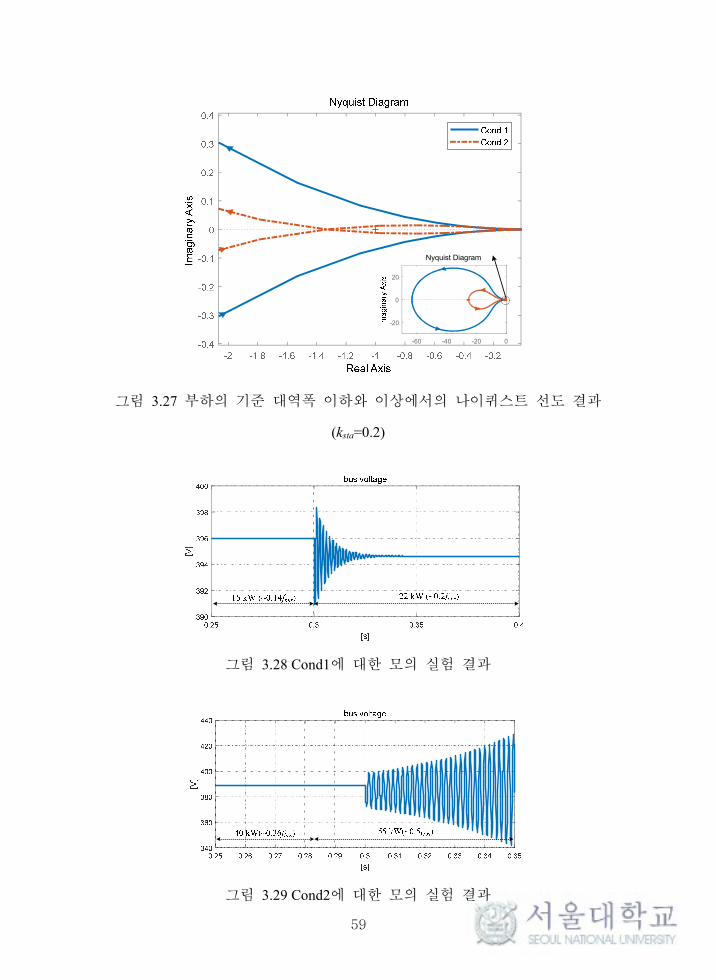
표 3.3의 예제를 통해 식 (3.22)의 유효성을 검증해본다. 표 3.3의
Case는 fLC=2fbw에 해당하는 조건으로 ksta는 0.2가 된다. 해당 경우에서 부
하의 대역폭을 fbus의 0.2배 및 0.5배로 설계한 경우의 전압 안정도는 그
림 3.26의 보드 선도와 그림 3.27의 나이퀴스트 선도를 통해 확인할 수
있다. 표 3.3에 나타난 케이블 대역폭 fcable과 (1-ksta)의 곱으로 발생하는
충분조건으로 인해 식 (3.22)의 결과가 충분 조건으로 동작하게 되어
Cond 1이 안정한 결과가 나타나며, Cond 2에서 불안정한 결과가 나타나게
된다. 그림 3.28과 그림 3.29는 시뮬레이션 결과를 나타낸다.
그림 3.26 부하의 기준 대역폭 이하와 이상에서의 시스템 보드 선도
(ksta=0.2)
59
-60 -40 -20 0
-20
0
20
Nyquist Diagram
그림 3.27 부하의 기준 대역폭 이하와 이상에서의 나이퀴스트 선도 결과
(ksta=0.2)
그림 3.28 Cond1에 대한 모의 실험 결과
그림 3.29 Cond2에 대한 모의 실험 결과

60
3.3 다중 전원단 시스템에서의 등가 버스 대역폭
그림 3.30 다중 전원단 시스템으로 구성된 버스
그림 3.30은 다중 전원단 컨버터가 공통 연결점에 연결되어 구성된
버스를 나타낸다. 개별 버스의 대역폭과 전원단의 제어 대역폭을 fbus,i 및
fbw,i라고 지칭하고 등가 버스 대역폭 및 제어 대역폭을 fbus 및 fbw로 하기
로 한다. 본 절에서는 다중 전원단을 구성할 경우 생길 수 있는 문제에
대해 분석한다. 기존의 연구들이 드룹 제어가 적용된 전원단 컨버터를
병렬할 경우 시스템 안정도가 개선되는 것으로 분석하는 것과 달리 [95-
96], 본 절에서는 시스템 안정도가 감소할 수 있음을 보이고 기존 연구
들의 경우와 비교한다. 그 후, 각기 다른 대역폭 특징을 지닌 버스가 병
렬되는 경우의 등가 버스 대역폭 및 특징들에 대해 분석한다.
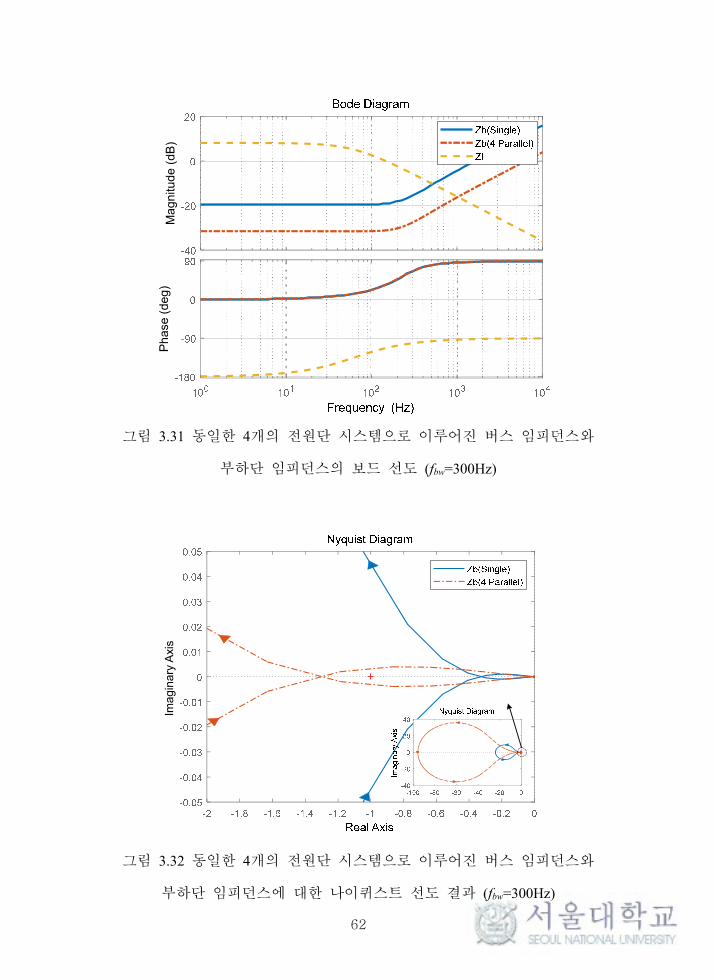
먼저 전원단이 병렬로 연결될 경우에 생길 수 있는 현상에 대해 알
아보기 위해 fbus=168Hz / fcable=47Hz / fbw=300Hz / fLC=500kHz / fload=66Hz를
파라미터로 가지는 시스템에서 동일한 fbus와 fbw를 가지는 전원단이 4개
가 병렬로 연결되는 경우를 살펴본다. 하드웨어의 제정수는 Ls,i(100uH),

61
CL(1mH)을 가정한다. 동일한 전원단을 병렬했으므로, Rs,i과 Ls,i의 비율이
동일하게 줄어들어 fbus와 fbw는 유지되는 것을 그림 3.31의 보드 선도에서
확인할 수 있다. 하지만 병렬로 인해 등가 인덕턴스 Leq가 0.25배로 줄어
들기 때문에 fLC는 1kHz로 증가한다. 한편, 병렬을 하기 전 시스템은 fcable
의 영향으로 인해 ksta는 0.27로 현재 fload/fbus인 0.38보다 크지만 그림 3.32
의 나이퀴스트 선도 결과 반시계 방향으로 (-1,0)을 감싸면서 안정한 것
을 볼 수 있다. 하지만, 전원단 병렬 결과 fLC의 증가로 ksta가 0.1로 줄어
들게 되어, 나이퀴스트 선도 결과 반시계 방향으로 감는 궤도를 벗어나
시계방향으로 (-1,0)을 감싸 불안정한 시스템을 나타낸다.
이번에는 다른 파라미터는 동일하게 유지하고 fbw가 450Hz로 증가된
경우를 살펴본다. 이 경우 ksta는 전원단의 병렬 후에도 ksta는 약 0.2의 값
을 유지하게 되므로, 단일 전원단 시스템이 안정한 상태에서 전원단이
병렬로 구성되어도 시스템은 안정도를 유지한다. 그림 3.34와 그림 3.35
의 보드 선도 및 나이퀴스트 선도 결과에서 시스템의 안정성을 확인할
수 있으며 모의 실험 결과 역시 일치한다.
한편, 기존의 연구에서 언급된 결과로 [93-94] 전원단의 병렬로 인해
드룹 전압의 변동폭이 줄어 안정성이 증가하는 경우 역시 존재한다. 이
러한 상황은 fbw>>fLC를 만족하여 전원단의 병렬에도 ksta값이 거의 일정한
경우로 용량이 큰 전력변환장치에서 fbw를 높이기에는 한계가 있으므로
일반적으로 큰 값이 캐패시터 뱅크(Capacitor bank)가 배전단에 존재하는
경우에 해당한다. 하지만, 예를 들어 fLC를 2배 낮추기 위해서는 필요한
캐패시턴스는 4배가 증가되어야 하기 때문에 용량에 대한 확장이 요구되
는 시스템인 경우에는 전원단의 병렬로 인한 안정도에 대한 고려가 필요
하다.
62
Ma
gn
itud
e (
dB
)P
ha
se (
de
g)
그림 3.31 동일한 4개의 전원단 시스템으로 이루어진 버스 임피던스와
부하단 임피던스의 보드 선도 (fbw=300Hz)
Imag
inar
y A
xis
그림 3.32 동일한 4개의 전원단 시스템으로 이루어진 버스 임피던스와
부하단 임피던스에 대한 나이퀴스트 선도 결과 (fbw=300Hz)

63
60 kW50 kW
그림 3.33 동일한 4개의 전원단 시스템에 대한 모의 실험 결과
(fbw=300Hz)
-40
-20
0
20
Mag
nitu
de (
dB)
Zb(Single)Zb(4 Parallel)Zl
100 101 102 103 104-180
-90
0
90
Pha
se (
deg)
Bode Diagram
Frequency (Hz)
그림 3.34 동일한 4개의 전원단 시스템으로 이루어진 버스 임피던스와
부하단 임피던스의 보드 선도 (fbw=450Hz)

64
Imag
inar
y A
xis
그림 3.35 동일한 2개의 전원단 시스템으로 이루어진 버스 임피던스와
부하단 임피던스에 대한 나이퀴스트 선도 결과 (fbw=450Hz)
그림 3.36 동일한 4개의 전원단 시스템에 대한 모의 실험 결과
(fbw=450Hz)

65
fbus
fbus1
fbus2
fbus3
?
그림 3.37 대역폭이 다른 전원단이 병렬로 붙는 경우
정리하면 fbw와 fLC가 충분히 떨어진 시스템이 아닌 경우에는 시스템
의 발전량 증가가 시스템의 안정도에 부정적인 영향을 줄 수 있으므로
고려가 필요하다. 이어지는 내용에서 그림 3.37의 내용을 논의한다. 버스
대역폭 fbus 및 전원단 제어 대어폭 fbw를 가지고 있는 시스템에 대해 식
(3.23)의 비를 지니는 대역폭 fbus1, fbus2, fbus3라는 전원단이 연결되는 경우의
등가 대역폭에 대해 분석한다.
1
2
3
0.9 1.1
1.1
0.9
bus bus bus
bus bus
bus bus
f f f
f f
f f
(3.23)
3.3.1 버스 대역폭 fbus1
fbus1은 기존 버스 대역폭 fbus에서 10%의 변동을 지니는 값으로 일반
적으로 10% 오차 범위의 경우 근사적으로 비슷한 값으로 간주하므로,
해당 경우는 비슷한 대역폭이 병렬로 연결되는 경우를 의미한다. 비슷한

66
대역폭을 지닌 두 버스 임피던스를 아래와 같이 표현할 때,
1 1 1
(1 / )
(1 / )b b b
b b b
Z R s
Z R s
(3.24)
대역폭이 비슷하기 때문에 병렬 임피던스를 구해보면 식 (3.25)으로 단순
화가 된다. 즉, 비슷한 대역폭을 붙이는 경우에 기존 대역폭인 fbus가 그
대로 유지된다.
11 1
1
/ / (1 / ( ))b bb b b b
b b
R RZ Z s
R R
(3.25)
등가 전원단의 대역폭 fbw는 식 (3.10)의 Rb를 케이블 저항 Rs를 무시
하여 식 (3.25)에 넣으면
1 1
1 1 1(1 / ) (1 / )b b d d
b b d bw d bw
R R R R
R R R s R s
(3.26)
fbus
fbus1Rb1
Rbfbus
fbus1Rb1
Rb
(a) (b)
그림 3.38 비슷한 대역폭을 구성하는 임피던스를 나타내는 근사 보드
선도
67
와 같이 정리된다. 이 때, 두 임피던스에서 크기 차이가 10배 이상 벌어
지는 경우인 그림 3.38(a)와 같은 경우에는 식 (3.26)은 Rd로 근사가 되어
등가 전원단의 제어 대역폭 fbw는 기존 전원단의 제어 대역폭이 된다. 반
면, 임피던스 크기가 비슷한 상태인 그림 3.38(b)와 같은 경우에는 Rd≒
Rd1이 되어
1
1
1
1
2(1 / )
2
b b d
b b havg
bw bwhavg
bw bw
R R R
R R s
(3.27)
로 정리된다. 이 때, ωhavg는 ωbw와 ωbw1의 조화평균(Harmonic Average)으
로 산술평균과 조화평균의 부등식인 식 (3.28)에 따라
1 1
1
2
2bw bw bw bw
bw bw
(3.28)
버스의 등가 전원단의 제어 대역폭은 기존 버스의 전원단 제어 대역폭의
2배를 넘을 수 없지만, 추가적으로 붙는 전원단 컨버터의 특징에 의해
낮아질 수 있다. 따라서, 비슷한 대역폭이 병렬로 붙는 경우에 기존 대역
폭의 특징을 유지하기 위해서는 임피던스 크기 차이를 많이 유지하는 것
이 필요하며, 이 경우에도 병렬로 다수의 전원단 컨버터가 붙는 경우에
는 기존 대역폭의 특징을 저하시키게 되므로 바람직하지 않다.
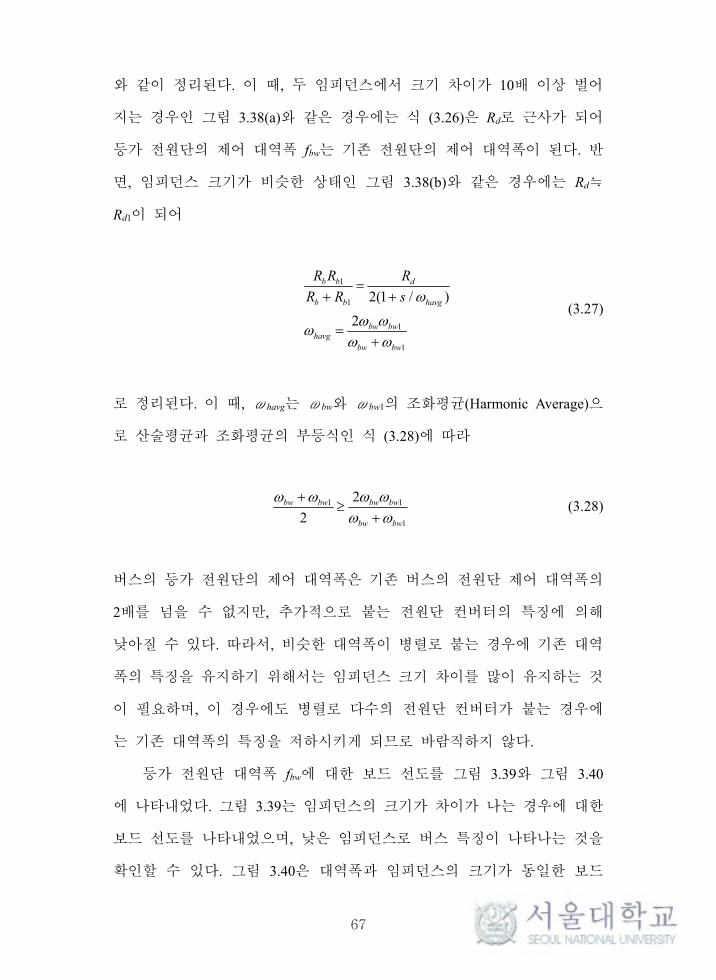
등가 전원단 대역폭 fbw에 대한 보드 선도를 그림 3.39와 그림 3.40
에 나타내었다. 그림 3.39는 임피던스의 크기가 차이가 나는 경우에 대한
보드 선도를 나타내었으며, 낮은 임피던스로 버스 특징이 나타나는 것을
확인할 수 있다. 그림 3.40은 대역폭과 임피던스의 크기가 동일한 보드

68
선도가 다른 전원단 대역폭을 가진 채 병렬되는 경우를 나타낸다. 300Hz
의 기존 전원단 제어 대역폭 fbw가 있을 때, 600Hz의 전원단 제어 대역폭
fbw1을 가지는 전원단이 병렬로 연결되는 경우에 대역폭은 비슷한 값을
유지하며, 위상 특성은 식 (3.28)에 따라 기존 fbw보다는 좋으며, fbw1보다
는 나빠진 것을 확인할 수 있다.
Ma
gnitu
de (
dB)
Pha
se (
deg)
그림 3.39 병렬로 구성된 두 전원단 컨버터의 임피던스 크기 차이가
나는 경우
69
Ma
gnitu
de (
dB)
Pha
se (
deg)
그림 3.40 전원단의 제어 대역폭이 다른 두 전원단 컨버터가 병렬로
구성되는 경우
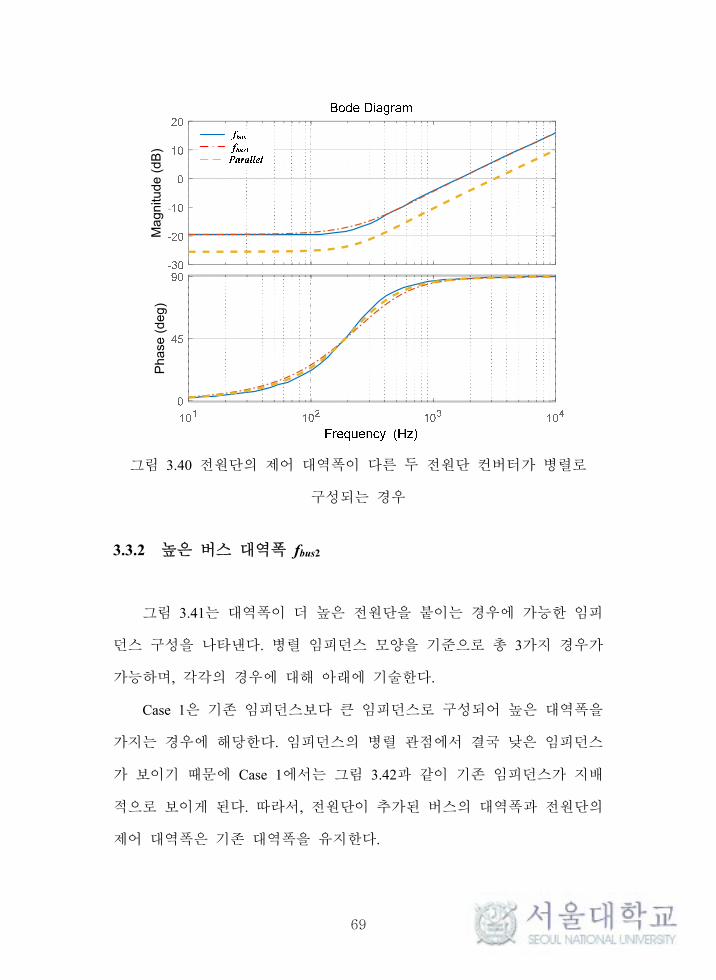
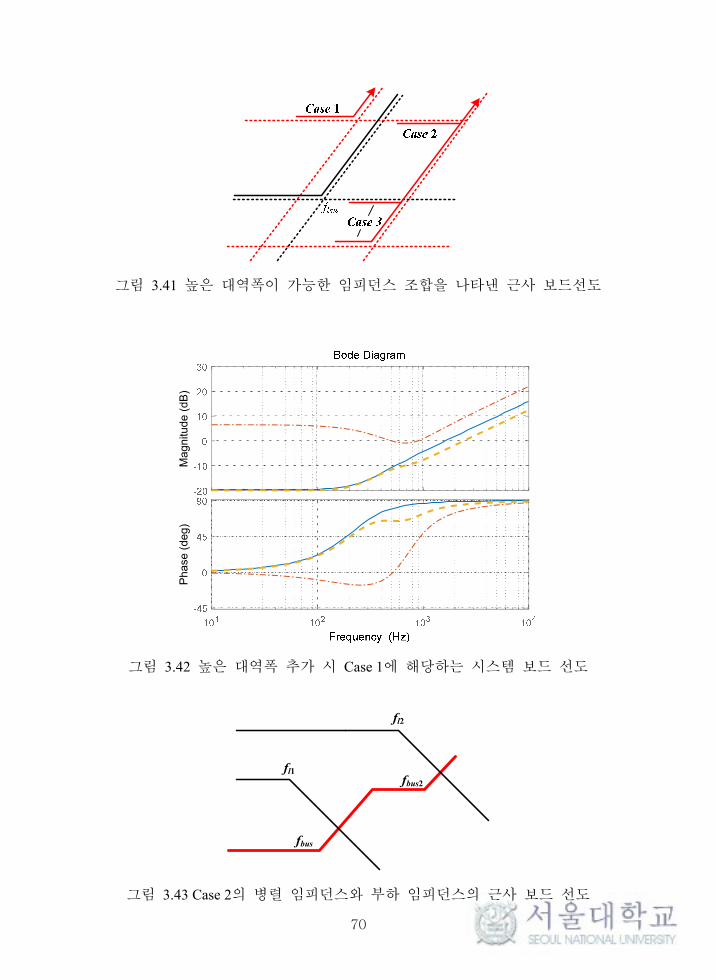
3.3.2 높은 버스 대역폭 fbus2
그림 3.41는 대역폭이 더 높은 전원단을 붙이는 경우에 가능한 임피
던스 구성을 나타낸다. 병렬 임피던스 모양을 기준으로 총 3가지 경우가
가능하며, 각각의 경우에 대해 아래에 기술한다.
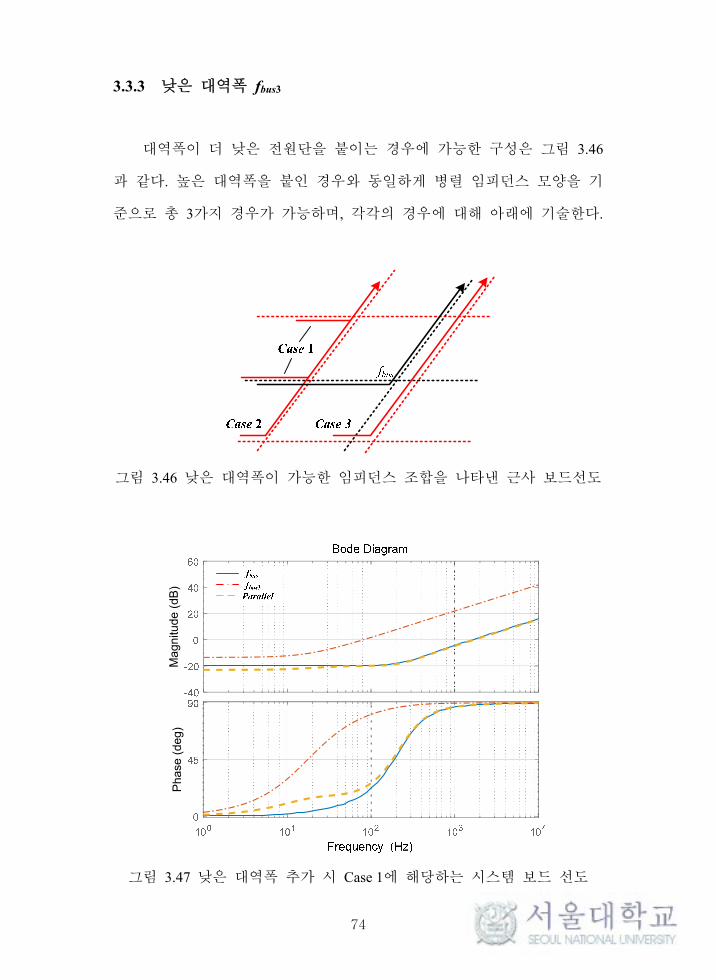
Case 1은 기존 임피던스보다 큰 임피던스로 구성되어 높은 대역폭을
가지는 경우에 해당한다. 임피던스의 병렬 관점에서 결국 낮은 임피던스
가 보이기 때문에 Case 1에서는 그림 3.42과 같이 기존 임피던스가 지배
적으로 보이게 된다. 따라서, 전원단이 추가된 버스의 대역폭과 전원단의
제어 대역폭은 기존 대역폭을 유지한다.
70
그림 3.41 높은 대역폭이 가능한 임피던스 조합을 나타낸 근사 보드선도
Mag
nitu
de (
dB)
Pha
se (
deg)
그림 3.42 높은 대역폭 추가 시 Case 1에 해당하는 시스템 보드 선도
fbus
fbus2
fl1
fl2
그림 3.43 Case 2의 병렬 임피던스와 부하 임피던스의 근사 보드 선도

71
Ma
gnitu
de (
dB)
Pha
se (
deg)
그림 3.44 높은 대역폭 추가 시 Case 2에 해당하는 시스템 보드 선도
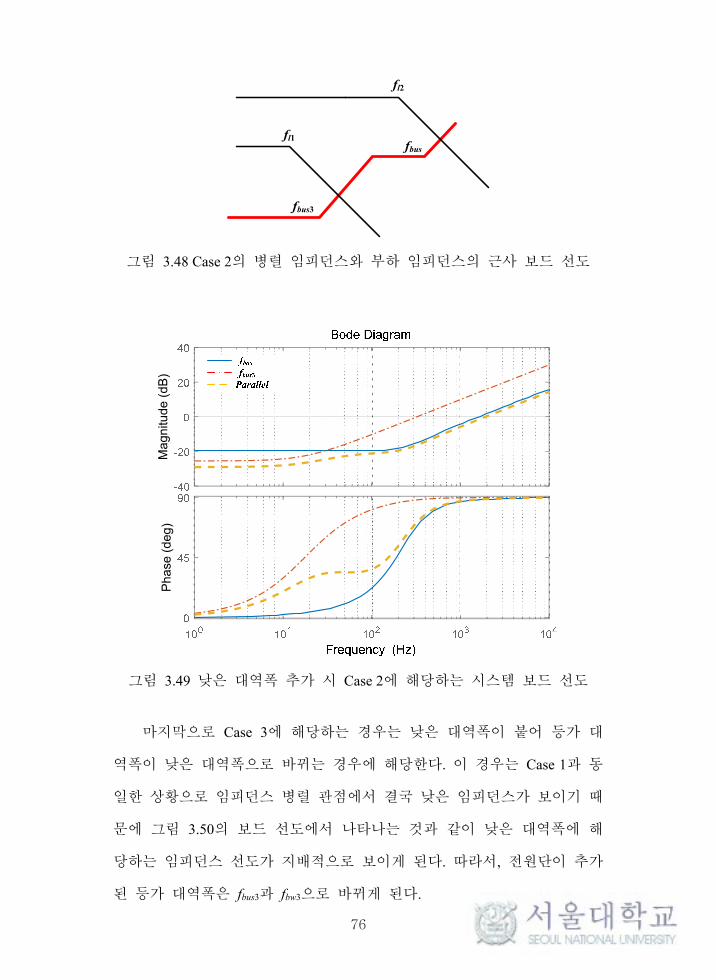
Case 2는 병렬 임피던스의 모양이 주파수에 따라 달라지게 되는데,
그림 3.43는 병렬 임피던스의 근사적인 모양을 나타낸다. 병렬 버스의 대
역폭 fbus와 전원단의 대역폭 fbw는 부하와 만나는 점인 fLC에서의 버스 특
징에 의해 결정되므로 Case 2의 등가 대역폭은 부하의 형태에 따라 바뀌
게 된다. 만약 fl1의 대역폭을 가지는 부하가 접속되는 경우에는 대역폭
이 높은 fbus2의 특성보다는 fbus의 특성이 중요하게 되지만, fl2의 대역폭을
가지는 부하가 접속되는 경우에는 fbus2의 특성이 버스의 등가 대역폭이
된다. 그림 3.44는 Case 2에 해당하는 보드 선도에 대해 나타낸다.
Case 1과 Case 2의 fl1과 만나는 시스템은, 높은 대역폭을 가진 전원단
이 붙었을 때 기존 대역폭이 유지되는 경우에 해당한다. 각각의 보드 선
도는 그림 3.42과 그림 3.44와 같은데, 기존 대역폭과의 차이로는 위상
특성이 모두 향상되었다는 점이 있다. 특히 Case 2에서 뚜렷하게 향상된

72
위상 특성을 관찰할 수 있는데, 높은 대역폭 전원단의 저항 성분과 기존
전원단의 인덕턴스로 인해 영점이 추가로 생겨 위상 특성이 향상되는 것
을 알 수 있다. 이 때, 향상된 위상 특성을 얻기 위해서는 fbus2의 저항 성
분이 부하와 시스템의 교점인 fLC까지는 특성을 유지해야 한다. 따라서
Case 2와 같은 특징을 나타내기 위해서는 기존 대역폭을 가진 버스에 높
은 대역폭을 가지고 병렬로 접속되는 버스에 대해 아래와 같은 특징이
요구되며, 이 때 높은 대역폭에 대한 정의를 아래 식과 같이 10배를 기
준으로 설정하였다.
2 10bus LC
bw LC
f f
f f
(3.29)
마지막으로 Case 3에 해당하는 경우는 높은 대역폭이 붙어 등가 대
역폭이 높은 대역폭으로 바뀌는 경우에 해당한다. 이 경우는 Case 1과 반
대되는 상황이며 임피던스의 병렬 관점에서 결국 낮은 임피던스가 보이
기 때문에 그림 3.45의 보드 선도에서 나타나는 것과 같이 높은 대역폭
에 해당하는 임피던스 선도가 지배적으로 보이게 된다. 따라서, 전원단이
추가된 등가 대역폭은 fbus2와 fbw2로 바뀌게 된다.
Case 2의 fl2와 만나는 시스템과 Case 3는 높은 대역폭을 가진 전원단
이 붙었을 때, 기존 대역폭이 유지되지 않는 경우에 해당한다. 각각의 보
드 선도가 그림 3.44와 그림 3.45을 통해 나타났는데 기존 대역폭이 유지
되는 경우와 비교했을 때의 차이는, 등가 대역폭의 특성이 높은 대역폭
을 가진 버스의 특징이었던 fbus2 및 fbw2보다 나빠졌다는 점이다. 그림
3.44의 높은 주파수 부분을 살펴보게 되면 기존 fbus2만 있을 때의 위상보
다 더 빠르게 위상이 상승하는 것을 볼 수 있으며 그림 3.45에서는 전
영역에서 더 빠르게 위상이 상승하게 된다. 한편, 이 경우에 해당하는 상

73
황은 Case 1과 Case 2의 fl1과 만나는 전원단 컨버터가 다수 병렬로 연결
된 경우로도 이해할 수 있다. 동일한 전원단 컨버터를 여러 개 병렬하게
되면 대역폭은 그대로인 상황에서 임피던스의 크기가 줄어들게 되므로
그림 3.41의 Case 1과 Case 2는 Case 3의 그래프로 변하게 된다. 따라서
이 경우 역시 식 (3.25)와 같은 특징이 설계 조건으로 요구된다.
정리하면 기존 대역폭을 가지는 시스템에 기존보다 높은 대역폭의
버스가 연결되는 경우에는
- 향상된 위상 특성을 가지는 기존 대역폭의 시스템
- 대역폭 특성이 다소 나빠진 높은 대역폭의 시스템
으로 바뀌게 되며, 위의 특성을 만족하기 위해서는 식 (3.25)가 설계 조
건으로 만족되어야 한다.
Ma
gnitu
de (
dB)
Pha
se (
deg)
그림 3.45 높은 대역폭 추가 시 Case 3에 해당하는 시스템 보드 선도
74
3.3.3 낮은 대역폭 fbus3
대역폭이 더 낮은 전원단을 붙이는 경우에 가능한 구성은 그림 3.46
과 같다. 높은 대역폭을 붙인 경우와 동일하게 병렬 임피던스 모양을 기
준으로 총 3가지 경우가 가능하며, 각각의 경우에 대해 아래에 기술한다.
그림 3.46 낮은 대역폭이 가능한 임피던스 조합을 나타낸 근사 보드선도
Mag
nitu
de (
dB)
Pha
se (
deg)
그림 3.47 낮은 대역폭 추가 시 Case 1에 해당하는 시스템 보드 선도

75
Case 1은 기존 임피던스보다 크거나 비슷한 임피던스로 구성되어 낮
은 대역폭을 가지는 경우에 해당한다. 임피던스의 병렬 관점에서 결국
낮은 임피던스가 보이기 때문에 Case 1에서는 그림 3.47과 같이 기존 임
피던스가 지배적으로 보이게 된다. 따라서 전원단이 추가된 등가 대역폭
은 기존 대역폭인 fbus와 fbw로 표현할 수 있다.
Case 2는 병렬 임피던스의 모양이 주파수에 따라 달라지게 되는데,
그림 3.48는 병렬 임피던스의 근사적인 모양을 나타낸다. 마찬가지로 버
스의 대역폭 fbus와 전원단의 대역폭 fbw는 부하와 만나는 점인 fLC에서의
값이 중요하기 때문에 Case 2의 등가 대역폭은 부하의 형태에 따라 바뀌
게 된다. 만약 fl1의 대역폭을 가지는 부하가 접속되는 경우에는 기존 대
역폭인 fbus보다는 fbus3에 영향을 받게 되지만, fl2의 대역폭을 가지는 부하
가 접속되는 경우에는 기존 대역폭인 fbus의 특성이 버스의 등가 대역폭
이 된다. 그림 3.49은 Case 2에 해당하는 보드 선도에 대해 나타낸다.
Case 1과 Case 2의 fl2와 만나는 시스템은 일부는 낮은 대역폭을 가진
전원단이 붙었을 때, 기존 대역폭이 유지되는 경우에 해당한다. 다중
Case 1의 병렬 시 Case 2로 등가 될 수 있다는 점에서 두 경우는 결국 유
사한 경우라고 생각할 수 있다. 보드 선도가 그림 3.47과 그림 3.49과 같
은데, 공통적으로 위상 특성이 나빠진 것을 알 수 있다. 이는 높은 대역
폭을 붙였을 때의 Case 2 중 일부와 Case 3에 해당하는 현상에서 상대적
인 위치가 반대로 뒤바뀐 상황과 일치한다. 하지만 시스템 교점 fLC 부근
에서 위상 특성이 크게 다르지 않으므로 안정도에 큰 문제가 생기지는
않는다. 추가로 붙는 시스템의 대역폭 fbus2가 fbus와 차이가 클수록 시스템
에 미치는 영향이 감소하므로 식 (3.29)와 마찬가지로 10배의 대역폭 기
준을 설정하여 아래와 같은 대역폭 설계가 요구된다.
3 10bus busf f (3.30)
76
fbus
fbus3
fl1
fl2
그림 3.48 Case 2의 병렬 임피던스와 부하 임피던스의 근사 보드 선도
Mag
nitu
de (
dB)
Pha
se (
deg)
그림 3.49 낮은 대역폭 추가 시 Case 2에 해당하는 시스템 보드 선도
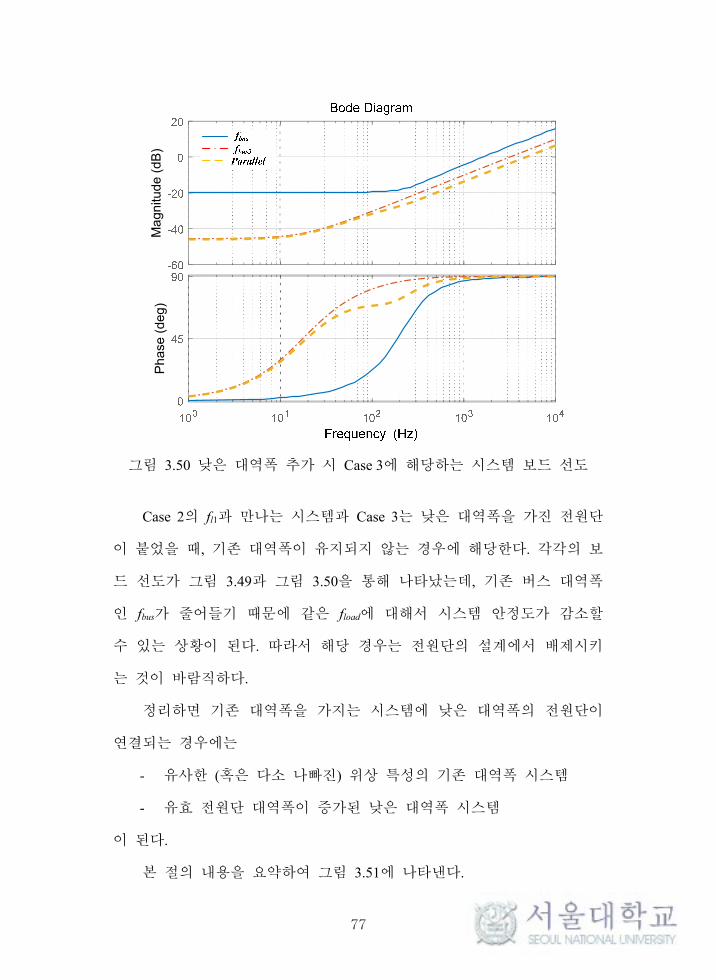
마지막으로 Case 3에 해당하는 경우는 낮은 대역폭이 붙어 등가 대
역폭이 낮은 대역폭으로 바뀌는 경우에 해당한다. 이 경우는 Case 1과 동
일한 상황으로 임피던스 병렬 관점에서 결국 낮은 임피던스가 보이기 때
문에 그림 3.50의 보드 선도에서 나타나는 것과 같이 낮은 대역폭에 해
당하는 임피던스 선도가 지배적으로 보이게 된다. 따라서, 전원단이 추가
된 등가 대역폭은 fbus3과 fbw3으로 바뀌게 된다.
77
Ma
gnitu
de (
dB)
Pha
se (
deg)
그림 3.50 낮은 대역폭 추가 시 Case 3에 해당하는 시스템 보드 선도
Case 2의 fl1과 만나는 시스템과 Case 3는 낮은 대역폭을 가진 전원단
이 붙었을 때, 기존 대역폭이 유지되지 않는 경우에 해당한다. 각각의 보
드 선도가 그림 3.49과 그림 3.50을 통해 나타났는데, 기존 버스 대역폭
인 fbus가 줄어들기 때문에 같은 fload에 대해서 시스템 안정도가 감소할
수 있는 상황이 된다. 따라서 해당 경우는 전원단의 설계에서 배제시키
는 것이 바람직하다.
정리하면 기존 대역폭을 가지는 시스템에 낮은 대역폭의 전원단이
연결되는 경우에는
- 유사한 (혹은 다소 나빠진) 위상 특성의 기존 대역폭 시스템
- 유효 전원단 대역폭이 증가된 낮은 대역폭 시스템
이 된다.
본 절의 내용을 요약하여 그림 3.51에 나타낸다.

78
그림 3.51 다중 전원단 병렬 연결 시 등가 버스 대역폭
79
3.4 다중 부하단 시스템에서의 등가 부하단 대역폭
CL -RL
fload
Load
CL,i -RL,i
i-th load
fload,i
fload,1
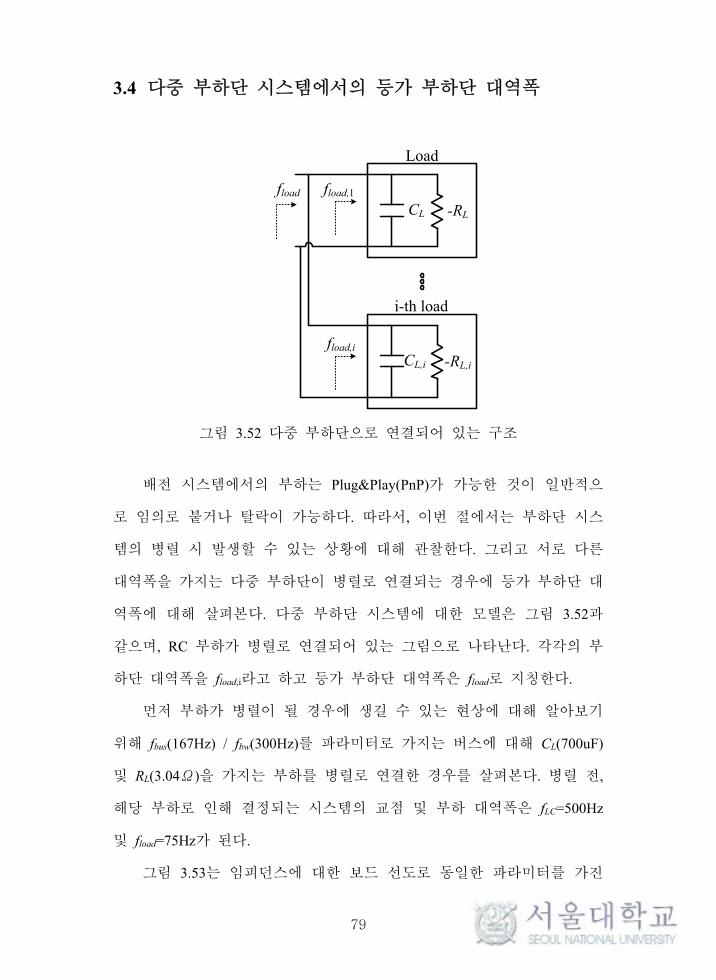
그림 3.52 다중 부하단으로 연결되어 있는 구조
배전 시스템에서의 부하는 Plug&Play(PnP)가 가능한 것이 일반적으
로 임의로 붙거나 탈락이 가능하다. 따라서, 이번 절에서는 부하단 시스
템의 병렬 시 발생할 수 있는 상황에 대해 관찰한다. 그리고 서로 다른
대역폭을 가지는 다중 부하단이 병렬로 연결되는 경우에 등가 부하단 대
역폭에 대해 살펴본다. 다중 부하단 시스템에 대한 모델은 그림 3.52과
같으며, RC 부하가 병렬로 연결되어 있는 그림으로 나타난다. 각각의 부
하단 대역폭을 fload,i라고 하고 등가 부하단 대역폭은 fload로 지칭한다.
먼저 부하가 병렬이 될 경우에 생길 수 있는 현상에 대해 알아보기
위해 fbus(167Hz) / fbw(300Hz)를 파라미터로 가지는 버스에 대해 CL(700uF)
및 RL(3.04Ω)을 가지는 부하를 병렬로 연결한 경우를 살펴본다. 병렬 전,
해당 부하로 인해 결정되는 시스템의 교점 및 부하 대역폭은 fLC=500Hz
및 fload=75Hz가 된다.
그림 3.53는 임피던스에 대한 보드 선도로 동일한 파라미터를 가진

80
임피던스의 병렬이므로 병렬 부하의 대역폭은 fload로 유지된다. 동시에
병렬로 인해 등가 부하단의 캐패시턴스가 기존 단일 부하단이 있는 상황
에 비해 두배로 늘어나기 때문에 fLC가 420Hz로 줄어들게 된다. 한편, 기
존에 부하단이 단일로 구성되어 있는 경우에 ksta는 0.27이며, fload/fbus가
0.44이지만 fcable에 의한 영향으로 시스템이 현재 댐핑이 없는 시스템에
가깝게 수렴하는 상태가 된다. 이는 그림 3.54의 나이퀴스트 선도 결과에
나타나있는데 결과적으로 시스템은 안정한 상태이지만, 안정과 불안정의
경계에 가까운 위치라는 것을 알 수 있다. 여기서 병렬로 부하가 붙는
경우에 fLC 감소로 인해 ksta는 0.34로 늘어나게 되고, 시스템의 안정도 여
유가 증가하게 된다. 이러한 결과는 나이퀴스트 선도에서 확인이 가능하
며 (-1,0)이 시계 방향으로 감싸는 원에서 멀어진 것을 관찰할 수 있다.
그림 3.55의 모의 실험 결과에서도 부하 변동에 대한 시스템의 수렴 속
도가 훨씬 빨라지는 것으로 관찰할 수 있다.
해당 경우는 fbw와 fLC가 근처에 있는 경우에 부하단의 병렬이 시스
템의 안정도를 증가시킬 수 있는 경우로, 동일한 조건 하에서 전원단의
병렬이 시스템 안정도를 감소시켰던 것과 반대되는 경우에 해당한다. 마
찬가지로 fbw와 fLC가 충분히 멀리 떨어진 상태인 경우에는 부하단의 병
렬은 시스템의 안정도에 큰 영향을 주지 못한다. 이어지는 내용에서는
대역폭이 다른 부하단이 병렬로 연결되는 경우의 등가 부하단 대역폭에
대해서 분석한다.
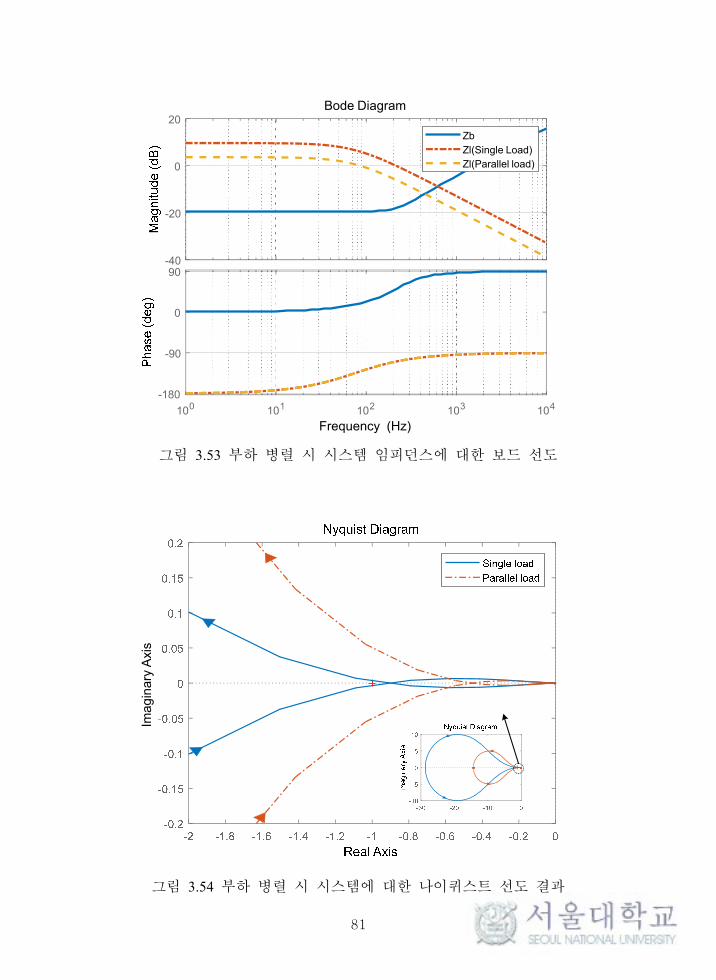
81
-40
-20
0
20
ZbZl(Single Load)Zl(Parallel load)
100 101 102 103 104-180
-90
0
90
Bode Diagram
Frequency (Hz)
그림 3.53 부하 병렬 시 시스템 임피던스에 대한 보드 선도
Imag
inar
y A
xis
그림 3.54 부하 병렬 시 시스템에 대한 나이퀴스트 선도 결과
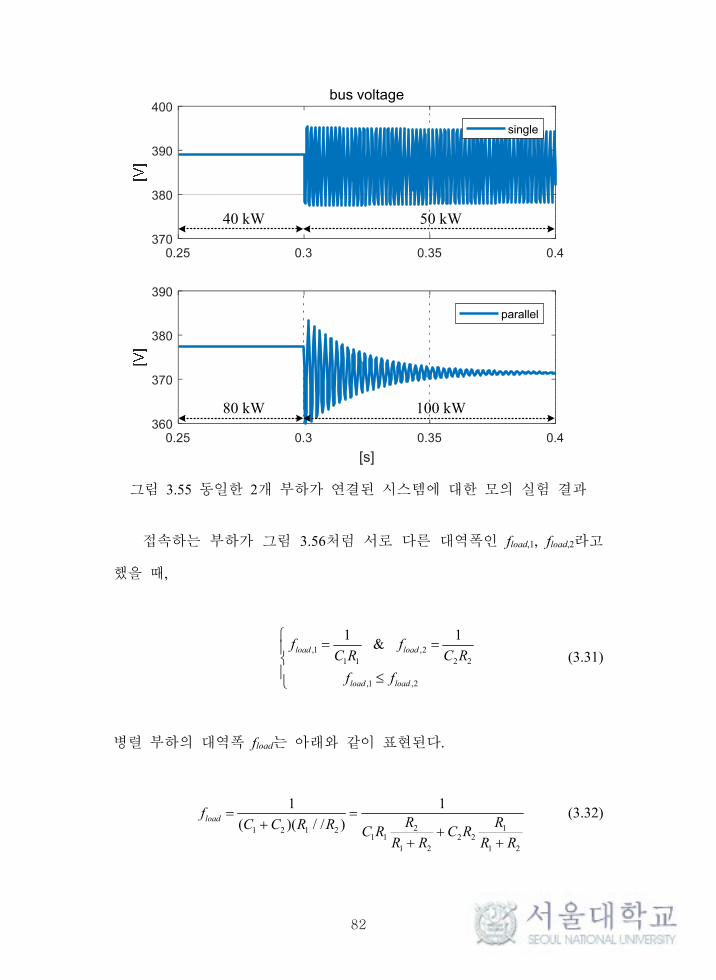
82
0.25 0.3 0.35 0.4370
380
390
400bus voltage
single
0.25 0.3 0.35 0.4
[s]
360
370
380
390
parallel
50 kW40 kW
100 kW80 kW
그림 3.55 동일한 2개 부하가 연결된 시스템에 대한 모의 실험 결과
접속하는 부하가 그림 3.56처럼 서로 다른 대역폭인 fload,1, fload,2라고
했을 때,
,1 ,21 1 2 2
,1 ,2
1 1&load load
load load
f fC R C R
f f
(3.31)
병렬 부하의 대역폭 fload는 아래와 같이 표현된다.
2 11 2 1 21 1 2 2
1 2 1 2
1 1
( )( / / )loadfR RC C R R C R C R
R R R R
(3.32)

83
C1 C2
R1
R2
fload,1
fload,2
fload?
그림 3.56 서로 다른 대역폭을 지닌 부하단의 보드 선도
-10
0
10
20
30
40
Mag
nitu
de (
dB)
fload1fload2fload
10-1 100 101 102 103-180
-135
-90
Pha
se (
deg)
Bode Diagram
Frequency (Hz)
그림 3.57 대역폭이 다른 부하의 병렬 보드 선도
이 때, fload,1≤fload,2 조건을 적용하면
2 12 2 1 1 2 2 1 1
1 2 1 2
R RC R C R C R C R
R R R R
(3.33)
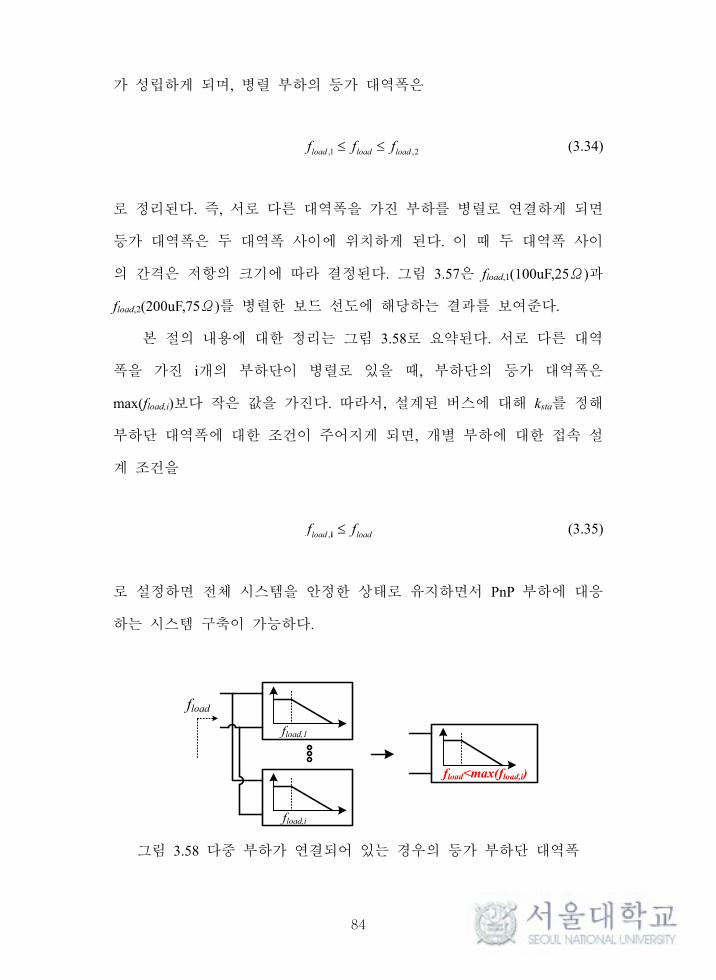
84
가 성립하게 되며, 병렬 부하의 등가 대역폭은
,1 ,2load load loadf f f (3.34)
로 정리된다. 즉, 서로 다른 대역폭을 가진 부하를 병렬로 연결하게 되면
등가 대역폭은 두 대역폭 사이에 위치하게 된다. 이 때 두 대역폭 사이
의 간격은 저항의 크기에 따라 결정된다. 그림 3.57은 fload,1(100uF,25Ω)과
fload,2(200uF,75Ω)를 병렬한 보드 선도에 해당하는 결과를 보여준다.
본 절의 내용에 대한 정리는 그림 3.58로 요약된다. 서로 다른 대역
폭을 가진 i개의 부하단이 병렬로 있을 때, 부하단의 등가 대역폭은
max(fload,i)보다 작은 값을 가진다. 따라서, 설계된 버스에 대해 ksta를 정해
부하단 대역폭에 대한 조건이 주어지게 되면, 개별 부하에 대한 접속 설
계 조건을
,iload loadf f (3.35)
로 설정하면 전체 시스템을 안정한 상태로 유지하면서 PnP 부하에 대응
하는 시스템 구축이 가능하다.
fload,1
fload,i
fload
fload<max(fload,i)
그림 3.58 다중 부하가 연결되어 있는 경우의 등가 부하단 대역폭
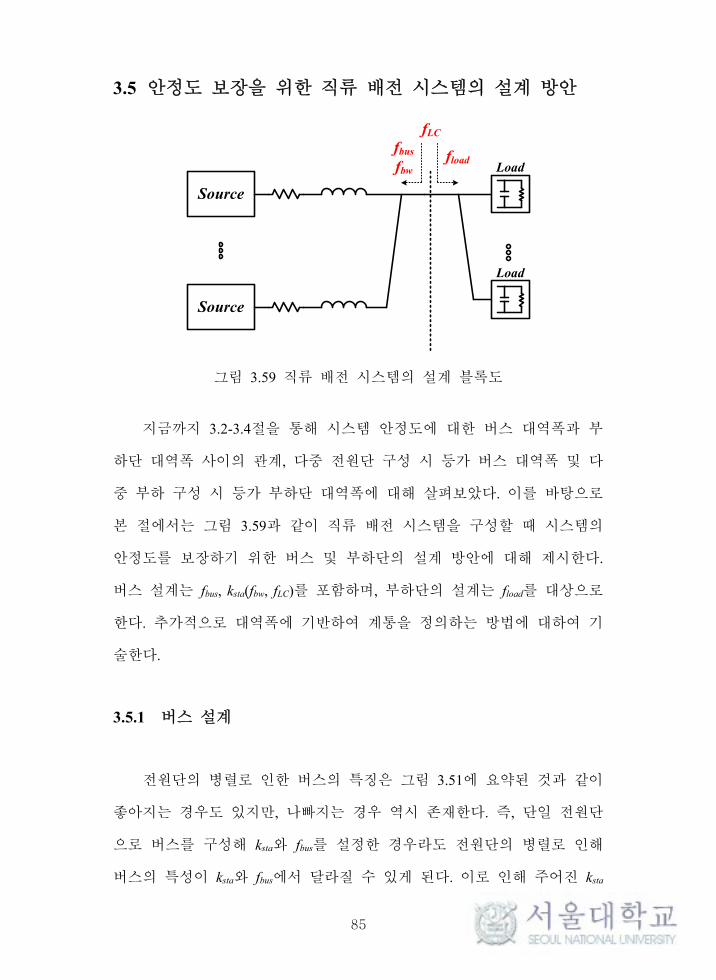
85
3.5 안정도 보장을 위한 직류 배전 시스템의 설계 방안
Source
Source
Load
Load
fbus
fbwfload
fLC
그림 3.59 직류 배전 시스템의 설계 블록도
지금까지 3.2-3.4절을 통해 시스템 안정도에 대한 버스 대역폭과 부
하단 대역폭 사이의 관계, 다중 전원단 구성 시 등가 버스 대역폭 및 다
중 부하 구성 시 등가 부하단 대역폭에 대해 살펴보았다. 이를 바탕으로
본 절에서는 그림 3.59과 같이 직류 배전 시스템을 구성할 때 시스템의
안정도를 보장하기 위한 버스 및 부하단의 설계 방안에 대해 제시한다.
버스 설계는 fbus, ksta(fbw, fLC)를 포함하며, 부하단의 설계는 fload를 대상으로
한다. 추가적으로 대역폭에 기반하여 계통을 정의하는 방법에 대하여 기
술한다.
3.5.1 버스 설계
전원단의 병렬로 인한 버스의 특징은 그림 3.51에 요약된 것과 같이
좋아지는 경우도 있지만, 나빠지는 경우 역시 존재한다. 즉, 단일 전원단
으로 버스를 구성해 ksta와 fbus를 설정한 경우라도 전원단의 병렬로 인해
버스의 특성이 ksta와 fbus에서 달라질 수 있게 된다. 이로 인해 주어진 ksta
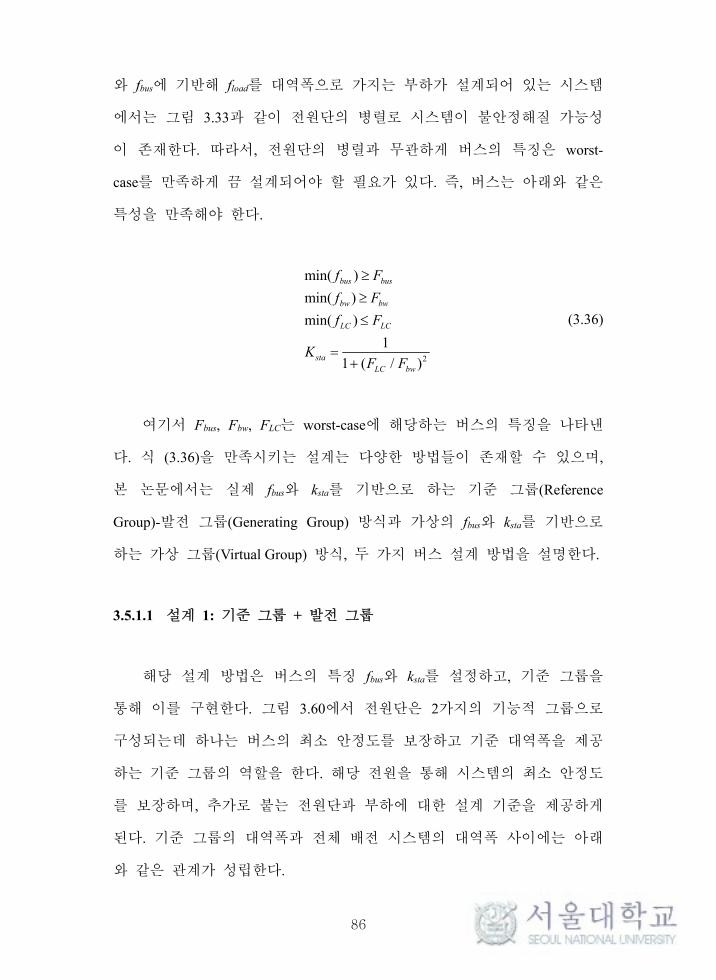
86
와 fbus에 기반해 fload를 대역폭으로 가지는 부하가 설계되어 있는 시스템
에서는 그림 3.33과 같이 전원단의 병렬로 시스템이 불안정해질 가능성
이 존재한다. 따라서, 전원단의 병렬과 무관하게 버스의 특징은 worst-
case를 만족하게 끔 설계되어야 할 필요가 있다. 즉, 버스는 아래와 같은
특성을 만족해야 한다.
2
min( )
min( )
min( )
1
1 ( / )
bus bus
bw bw
LC LC
staLC bw
f F
f F
f F
KF F
(3.36)
여기서 Fbus, Fbw, FLC는 worst-case에 해당하는 버스의 특징을 나타낸
다. 식 (3.36)을 만족시키는 설계는 다양한 방법들이 존재할 수 있으며,
본 논문에서는 실제 fbus와 ksta를 기반으로 하는 기준 그룹(Reference
Group)-발전 그룹(Generating Group) 방식과 가상의 fbus와 ksta를 기반으로
하는 가상 그룹(Virtual Group) 방식, 두 가지 버스 설계 방법을 설명한다.
3.5.1.1 설계 1: 기준 그룹 + 발전 그룹
해당 설계 방법은 버스의 특징 fbus와 ksta를 설정하고, 기준 그룹을
통해 이를 구현한다. 그림 3.60에서 전원단은 2가지의 기능적 그룹으로
구성되는데 하나는 버스의 최소 안정도를 보장하고 기준 대역폭을 제공
하는 기준 그룹의 역할을 한다. 해당 전원을 통해 시스템의 최소 안정도
를 보장하며, 추가로 붙는 전원단과 부하에 대한 설계 기준을 제공하게
된다. 기준 그룹의 대역폭과 전체 배전 시스템의 대역폭 사이에는 아래
와 같은 관계가 성립한다.

87
,
,
bus r bus
sta r sta
f F
k K
(3.37)
발전 그룹(Generating group)은 탈/부착이 가능한 발전원으로의 역할을
수행한다. 이 때, 발전 그룹의 특징인 fbus,g와 fbw,g의 설계는 기준 그룹의
대역폭인 fbus,r과 fbw,r를 기준으로 한다. 설계는 시스템의 안정도를 나빠지
지 않게 만드는 방향으로 대역폭 설계가 이루어져야 하는데, 이 방향에
해당하는 설계로는 그림 3.51에서 버스 특성을 향상시키는 방법과 특성
을 유지시키는 방법으로 제한된다. 이 중에서도 실제 시스템을 설계하는
관점에서 가능한 방법은 제한이 될 수 있는데, 이에 대해서는 4장에서
기술하도록 한다. 따라서 기준 그룹-발전 그룹 설계를 통해 전원단을 구
성하였을 때 등가 버스의 대역폭은 다음과 같이 주어진다.
bus bus
sta sta
f F
k K
(3.38)
그림 3.60 기준 그룹 – 발전 그룹 구조의 설계 방식

88
기준 그룹의 경우 시스템의 안정성을 형성하는 측면에서 마이크로그
리드에서 계통을 형성하는 Grid-forming inverter와 유사한 의미를 지닌다.
기준 그룹 내의 컨버터는 여러 개로 구성이 될 수 있으며, 동일한 컨버
터가 병렬로 구성이 되는 경우에는 기준 그룹의 내부 구성 요소 역시 탈
/부착이 가능하게 된다. 발전 그룹은 형성된 시스템의 안정도에 영향을
주지 않거나 향상시키는 역할을 하며, 이는 계통에 파워 공급만을 담당
하는 Grid-feeding inverter 및 계통 상태를 보조하는 Grid-supporting inverter
와 유사한 의미를 지닌다. 하지만, 계통을 형성하는 Grid-forming의 역할
을 수행하지 않는 Grid-feeding inverter 및 Grid-supporting inverter와 달리
본 논문에서는 모두 드룹 제어를 가정하기 때문에 발전 그룹 역시 grid-
forming의 기능을 할 수 있는 차이점을 지닌다.
3.5.1.2 설계 2: 가상 그룹
Source
Source
fbus,v1
fbw,v1
fbus
fbw
fbus,vi
fbw,vi
그림 3.61 가상 그룹 구조의 설계 방식
가상 그룹을 통한 시스템 설계에서도 설계 1과 마찬가지로 버스의
worst-case 특징인 Fbus와 Ksta를 설정한다. 다만, 설계 1에서 기준 그룹을
통해 Fbus와 Ksta를 시스템의 기준 대역폭으로 제시한 것과 달리 가상 그
룹 방식에서는 별도의 기준 그룹이 존재하지 않는다. 대신 가상 그룹 방

89
식에서는 가상의 기준 그룹이 존재하는 것처럼 생각하고, 해당 가상 기
준 그룹이 버스의 특징으로 제시하는 Fbus와 Ksta를 유지하는 방향으로 전
원단을 설계하게 된다.
이 경우에 가능한 설계 방식은 설계 1에 비해 제한적으로, 버스 특
징을 구현하는 물리적인 그룹이 존재하지 않기 때문에 그림 3.51에서 버
스 특징을 유지할 수 있는 전원단의 설계는 적용할 수 없다. 따라서 가
능한 방식은 높은 대역폭을 붙이는 방식만이 가능하다. 이를 위한 가상
그룹의 전원단 설계 조건은 식 (3.29)을 다시 적은 식 (3.39)과 같으며,
,
,
10bus v LC
bw v LC
f F
f F
(3.39)
버스의 특징은 식 (3.40)를 만족한다.
,
,
bus bus r
sta sta r
f f
k k
(3.40)
3.5.2 부하단 설계
전압 안정도를 유지하기 위한 대역폭의 관계를 식 (3.35)와 함께 적
으면
,iload load sta busf f k f (3.41)
가 된다. 시스템이 안정하기 위해서는 전원단 설계를 통해 주어진 ksta와
fbus의 곱보다 부하단의 등가 대역폭 fload가 낮게 유지되어야 한다. 이를
위해서는 개별 부하단의 대역폭 fload,i를 부하단의 등가 대역폭 fload보다

90
작게 설계를 해야 한다. 전원단 설계로부터 보장된 worst-case 버스 특징
인 Fbus와 Ksta에 따라 개별 부하단 설계는
,iload sta busf K F (3.42)
를 만족하도록 설계하면 시스템 안정도를 만족시킬 수 있다. 식 (3.38)이
적용되는 부하는 시스템을 불안정하게 만들 수 있는 정전력 부하를 대상
으로 하며, 정전류 부하나 정저항 부하의 경우는 식 (3.38)과 무관하게
시스템 안정도를 유지한다.
한편, 버스 설계에서 제시된 FLC는 버스에 존재하는 케이블 인덕턴
스 성분과 부하의 캐패시턴스 성분으로 결정이 된다. 따라서, 버스에서
설계된 FLC를 만족시키기 위해서는 부하단에 고정적인 캐패시턴스 값이
요구된다. 단순히 식 (3.36)의 조건을 고려한다면 부하가 큰 상황에서는
RL이 작기 때문에 CL이 커져 FLC를 만족할 수 있지만, 경부하 상황으로
가게 되면 RL이 커져 CL이 작아지는 문제가 발생한다. 즉, 시스템이 경부
하에서 worst-case로 제시된 버스 특징을 달성하지 못할 수 있다. 이를
해결하기 위한 방법으로 아래의 두 가지가 가능하다.
- FLC를 만족하기 위한 고정적인 캐패시턴스 Csta를 부하단에 설치
- 식 (3.38)에 더해 최소 부하 캐패시턴스 Csta를 부하단 설계 조건
으로 추가 제시
각각의 방법에 대해서 4장 시스템 설계에 대한 모의 실험에서 확인하도
록 한다.

91
3.5.3 대역폭을 기반으로 하는 계통
가상 그룹에 기반한 설계 방법을 활용하면 일반적인 직류 계통에 대
한 설계 기준을 표현하는 것이 가능하다. 먼저 설계의 대상이 되는 직류
계통을 FLC bandwidth grid로 정의한다. 그리고 해당 계통이 정의되면 Ksta
와 Fbus는 미리 정해진 값을 가지고 있다고 가정한다. 이 경우, 전원단 접
속 조건은 식 (3.35)으로 주어지며 부하단 접속 조건은 식 (3.37)로 주어
지게 된다. 즉, 임의의 직류 배전 시스템을 FLC bandwidth grid라고 정의하
는 경우 해당 시스템이 안정하기 위해 필요한 전원단의 접속 조건과 부
하단의 접속 조건은 표 3.4와 같이 주어지게 된다.
표 3.4 가상 그룹에 기반한 계통 정의 및 접속 규정
계통 정의 FLC bandwidth grid
정의된 값 Ksta, Fbus
전원단 접속 조건 ,
,
10bus v LC
bw v LC
f F
f F
부하단 접속 조건 load sta busf K F
본 논문의 연구에서는 대역폭 기반의 계통을 개념적으로 정의하는
것에 제한한다. 하지만 전원단 및 부하단 전력변환장치에 대한 실제 정
보들을 기반으로 FLC, Ksta 및 Fbus에 대한 현실적인 값들을 얻을 수 있
는 경우에 해당 방법은, 직류 계통에 대한 정의 및 시스템 안정도를 위
한 접속 규정을 제시한다는 측면에서 보편적인 기준이 될 수 있는 가능
성을 제시할 수 있는 특징을 지닌다.

92

93
제 4 장 직류 배전 시스템의 대역폭 기반 설계
및 고려사항
4.1 개요
지금까지 대역폭에 기반하여 직류 배전 시스템을 해석한 결과 직류
버스의 특징을 나타내는 값으로 fbus, fbw, fLC가 사용되며, 부하단은 fload를
통해 표현되었다. 이 때, 부하단의 설계 조건인 fload는 나머지 특징들이
결정된 후에 정해지는 값이기 때문에 버스의 특징에 의존적이다. 서로
다른 대역폭을 가진 부하단의 병렬 시 등가 대역폭이 간단하게 표현되는
것에 비해, 서로 다른 대역폭을 가진 전원단을 병렬로 연결하는 경우 fbus
와 fbw가 다양한 형태로 변할 수 있기 때문에 버스의 특징이 고정되지
않는 문제가 발생하였다. 이로 인해 기존에 안정한 시스템이 전원단의
병렬로 인해 불안정한 시스템으로 바뀌는 것이 확인되었기 때문에, 버스
가 제공하는 특징의 하한선을 보장하는 것은 시스템을 설계하기 위해 필
수적인 조건이 된다. 이를 위한 여러 가지 방법 중에서 본 논문에서는
두 가지 시스템 설계 방법으로 기준 그룹-발전 그룹 설계 방식과 가상
그룹 설계 방식을 설명한다.
표 4.1 직류 배전 시스템의 예시 설계 사양
설계 사항 값
정상상태 전압 범위 375-400 [V]
설치 용량 200 [kW]
설치 용량을 포함한 확장 용량 1000 [kW]

94
본 절에서는 제안된 시스템 설계 방식을 적용해 가상의 직류 배전
시스템을 설계하는 것을 목적으로 한다. 가상의 직류 배전 시스템은 표
4.1과 같은 예시 설계 사양을 지니는 것으로 가정한다. 정상상태 전압 범
위는 일반적으로 드룹 저항으로 인한 전압 강하와 케이블로 인한 전압
강하, 그리고 기타 여분의 합을 통해 10% 이내로 이루어지며 [97], 본 시
뮬레이션에서는 드룹과 케이블에 의한 전압 강하만을 고려하여 전압 범
위를 설정하였다. 설계의 목적은 전압 안정도를 만족시켜 수렴하는 시스
템이기 때문에 기타 설계 사양들은 고려하지 않는다. 또한, 부하의 형태
는 시스템 안정도에 영향을 주는 정전력 부하만이 존재한다고 가정하여
worst-case를 모의한다. 공통 연결점의 위치는 설정이 되어 있으며 버스
설계 시 케이블 임피던스 정보는 결정되는 것으로 가정한다. 만약 케이
블 임피던스의 변동 범위가 주어지게 되면, 가장 큰 임피던스를 기준으
로 설계를 진행하는 것이 worst-case에 해당한다.
시스템 설계는 제안하는 두 가지 방식으로 각각 진행하며, 각 방식
의 장/단점에 대해 논의한다. 모의 실험을 통해 제안하는 대역폭을 바탕
으로 하는 설계의 유효성을 확인한다. 전원단 컨버터는 모두 드룹 제어
를 사용하며, 1차 시스템의 출력 임피던스 특징을 나타내는 벅 컨버터 기
반의 I-V 드룹제어를 적용하여 모의 실험을 진행한다. 부하단의 경우
worst-case를 가정하여 동특성이 이상적인 정전력 부하를 가정하여 모의
실험에 사용하였다.
제안하는 설계 방식의 유효성을 확인한 후, 현실적인 고려사항에 대
해서 분석한다. 먼저 디지털 제어가 적용되는 경우에 나타날 수 있는 점
들에 대하여 분석한다. 그리고 2장의 전원단 모델링에서 언급하였듯이,
드룹 제어가 적용된 실제 출력 임피던스는 1차 시스템과 비슷할 수도 있
지만 차이가 발생하는 경우도 존재하기 때문에 이러한 출력 임피던스가
대역폭 설계에 미치는 영향에 대해 분석한다. 다음으로 캐패시턴스의

95
ESR로 인한 영향을 살펴본다. 그리고 버스의 대역폭 특성을 측정하는
방법에 대하여 설명하며, 버스의 대역폭 설계에 필요한 사항들에 대하여
분석한다.
4.2 시스템 설계 1 – 기준 그룹/발전 그룹
Source
Source
Reference Group
Generating Group
fbus,g
fbw,g
fbus
fbw Load
Load
fload
fLCfbus,r
fbw,r
그림 4.1 기준 그룹/발전 그룹 기반 직류 배전 시스템 구조
본 절에서는 기준 그룹 및 발전 그룹을 바탕으로 시스템 설계를
진행한다. 표 4.1에 제시된 예시 설계 사양을 대상으로 200kW의 기준
그룹과 나머지 용량에 해당하는 발전 그룹을 설계하고, 부하단 설계
조건을 제시한다. 시스템 설계의 결과로 그림 4.1의 대역폭 기준들을
정리하여 나타낸다.
4.2.1 버스 설계 – 기준 그룹
기준 그룹에서는 시스템 설계에 사용이 가능한 기준 대역폭 fbus 및
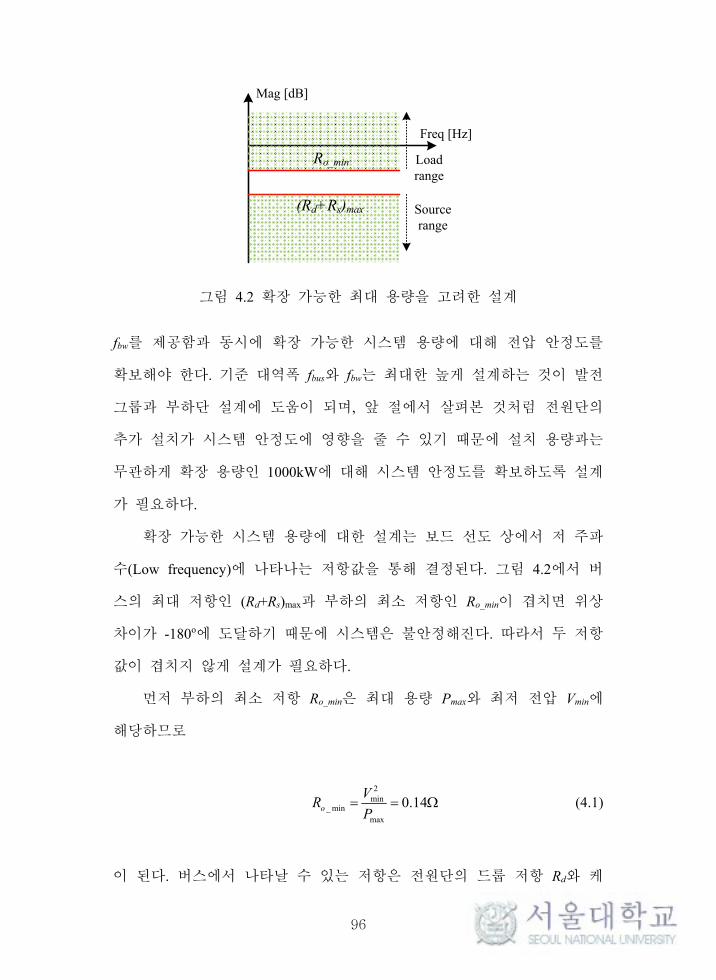
96
fbw를 제공함과 동시에 확장 가능한 시스템 용량에 대해 전압 안정도를
확보해야 한다. 기준 대역폭 fbus와 fbw는 최대한 높게 설계하는 것이 발전
그룹과 부하단 설계에 도움이 되며, 앞 절에서 살펴본 것처럼 전원단의
추가 설치가 시스템 안정도에 영향을 줄 수 있기 때문에 설치 용량과는
무관하게 확장 용량인 1000kW에 대해 시스템 안정도를 확보하도록 설계
가 필요하다.
확장 가능한 시스템 용량에 대한 설계는 보드 선도 상에서 저 주파
수(Low frequency)에 나타나는 저항값을 통해 결정된다. 그림 4.2에서 버
스의 최대 저항인 (Rd+Rs)max과 부하의 최소 저항인 Ro_min이 겹치면 위상
차이가 -180o에 도달하기 때문에 시스템은 불안정해진다. 따라서 두 저항
값이 겹치지 않게 설계가 필요하다.
먼저 부하의 최소 저항 Ro_min은 최대 용량 Pmax와 최저 전압 Vmin에
해당하므로
2min
_ minmax
0.14o
VR
P (4.1)
이 된다. 버스에서 나타날 수 있는 저항은 전원단의 드룹 저항 Rd와 케
Mag [dB]
Freq [Hz]
Load range
Source range
Ro_min
(Rd+Rs)max
그림 4.2 확장 가능한 최대 용량을 고려한 설계
97
이블 저항 Rs의 합이며, 이 값이 Ro_min보다 작아야 한다.
_ mind s oR R R (4.2)
계통에 발생하는 전압 강하는 그림 4.3과 같이 드룹 저항 Rd로 인한
강하와 케이블 저항 Rs로 인한 강하가 합쳐져서 나타난다. 이 때 전압
강하의 합이 표 4.1에서 주어진 계통 정상 전압의 허용치 범위 ΔV=25V
를 만족해야 한다.
케이블에서 발생하는 전력 손실에 대한 전체 전력의 비율을 lloss라고
했을 때, 케이블 저항은
max2max
losss
P lR
I (4.3)
가 되며, 케이블 양단에 걸리는 전압 Vline은
maxmax min
max min( / )loss
line s loss
P lV R I l V
P V (4.4)
으로 표현된다. 즉, 최대 전력일 때 케이블에서 발생하는 전압 강하는 가
V
그림 4.3 드룹 저항과 케이블 저항이 고려된 계통전압 강하

98
장 낮은 버스 전압에 케이블의 손실 비율인 lloss의 곱으로 나타난다. 여
기서 lloss를 1%로 선택하면 Vline은 약 4V가 되며, 따라서 드룹 저항으로
인한 전압 범위를 20V로 설정하게 되면 전체 정상 전압 범위인 25V 이
내로 전압이 설정된다. 1% 라인 손실과 20V 드룹 전압 범위를 식 (4.2)에
대입하면
max2
max max
0.01200.14d c
PR R
I I (4.5)
이 되며, 위 식을 다시 정리하게 되면
max 170I A (4.6)
이 된다. 다시 버스 최소 전압을 곱하게 되면
max 64.6P kW (4.7)
를 얻을 수 있다.
전원단 용량이 약 65kW를 넘게 되면 드룹 저항과 케이블 저항의 합
이 최대 시스템 용량에 해당하는 저항보다 낮아지면서, 주어진 정상 동
작 전압의 범위를 만족하는 설계가 가능하다. 이 때, Pmax의 최소값은 케
이블에서 발생하는 전압 강하의 비율에 따라 달라질 수 있으며 전압 강
하가 클수록 요구되는 전원단 용량이 커지게 된다. 한편 fbus와 fbw는 크게
설계될수록 유리한데, fbus가 크기 위해선 Rd가 커야 하므로 용량이 작은
전원단을 사용할수록 좋다. 또한 fbw가 커지기 위해선 기본적으로 스위칭
주파수가 높을수록 좋은데 이 역시 용량이 작은 전원단일수록 유리하게
된다. 본 설계에서는 기준 그룹에 동일한 100kW 전원단 2개를 사용하여
200kW를 구성하였다.

99
100kW에 해당하는 드룹 저항 Rd와 1% 손실에 해당하는 케이블 저
항 Rs는
0.076
0.014d
s
R
R
(4.8)
가 된다. 그림 2.19를 참고하여 해당 케이블 저항에 대해 발생하는 인덕
턴스를 100uH로 가정하고, 전원단의 제어 대역폭 fbw는 100Hz로 설정한
다. 정리하면 기준 그룹의 특성은 식 (4.9)로 정리되며, 그림 4.4는 버스
임피던스인 Zb를 나타낸다.
,
,
143
100
50
bus r
bw r
eq
f Hz
f Hz
L H
(4.8)
-40
-20
0
20
Mag
nitu
de (
dB)
Zb_r(200kW)
Zb_r(100kW)
100 101 102 103 104-45
0
45
90
Pha
se (
deg)
Bode Diagram
Frequency (Hz)
그림 4.4 버스 임피던스 보드 선도
100
추가적으로 결정되어야 할 기준 그룹의 특징은 ksta로 본 설계 예제
에서는 ksta를 0.1로 설정하였다. 이에 따라 결정되는 fLC와 fLC를 만족하기
위한 부하단의 최소 캐패시턴스 Csta는 식 (4.9)와 같다.
,
,
0.1
300
5.6
sta r
LC r
sta
k
f Hz
C mF
(4.9)
이 때, 시스템의 worst-case 안정도 Fbus, Fbw, FLC, Ksta는 다음과 같은 관계
가 성립한다.
,
,
,
,
bus bus r
bw bw r
LC LC r
sta sta r
F f
F f
F f
K k
(4.10)
4.2.2 버스 설계 – 발전 그룹
발전 그룹 설계는 Fbus, Fbw, FLC를 통해 이루어진다. 표 4.1에 따라 최
대 용량 이내 범위에서 10kW, 150kW 및 600kW의 전원단이 현재 설계된
기준 그룹으로 이루어진 버스에 추가된다고 할 때, 이들을 설계하는 것
에 대하여 설명한다.
4.2.2.1 10kW 전원단 컨버터
먼저 10kW 전원단 컨버터를 설계하는 방법에 대하여 설명한다. 같
은 전압 범위를 가질 때, 용량이 작은 경우 드룹 저항이 크기 때문에 현
재 설정된 버스 임피던스의 저 주파수 크기보다 위쪽에 위치하게 된다.

101
이 경우에 전원단의 설계는 그림 4.5과 같이 대역폭이 낮은 경우와 높은
경우 모두 가능하다.
그림 4.5(a)는 전원단이 아래와 같은 대역폭을 가진 경우에 해당한다.
, 10bus g busf F (4.11)
대역폭이 기준 대역폭보다 매우 작게 설계되어 있는 경우로 Rd가 작은
상태이므로 선로 길이가 매우 길거나, 추가적인 필터 요소로 인해 케이
블에 인덕턴스가 매우 커진 상황에 해당한다. 버스 임피던스가 발전 그
룹의 임피던스보다 더 작아 전체 임피던스는 버스 임피던스로 유지되며,
전체 시스템의 특성 또한 기존 대역폭을 유지한다.
두 번째 경우인 그림 4.5(b)는 아래와 같은 대역폭을 가진 경우에 해
당한다.
,
,
10bus g LC
bw g LC
f F
f F
(4.12)
이 경우 전체적인 임피던스 모양은 3.3절의 그림 3.44에서 설명한 것과
같이 주파수에 따라 바뀌게 된다. 하지만 시스템 대역폭 fLC가 고정되어
있는 상황에서(부하가 증가할수록 fLC는 커지기 때문에 왼쪽으로 이동),
식 (4.12)의 조건을 만족하도록 전원단이 붙는 경우에는 전체 버스의 대
역폭 특징은 기존 대역폭 특징을 따라가게 된다. 동시에 위상 특성이 향
상되기 때문에 이 경우는 시스템 안정도 향상에 기여하게 된다. Rd값이
크면서 Ls값이 같거나 작기 때문에, 소규모 분산전원을 설치하면서 필터
가 없이 짧은 길이에 케이블로 연결된 경우에 해당한다.
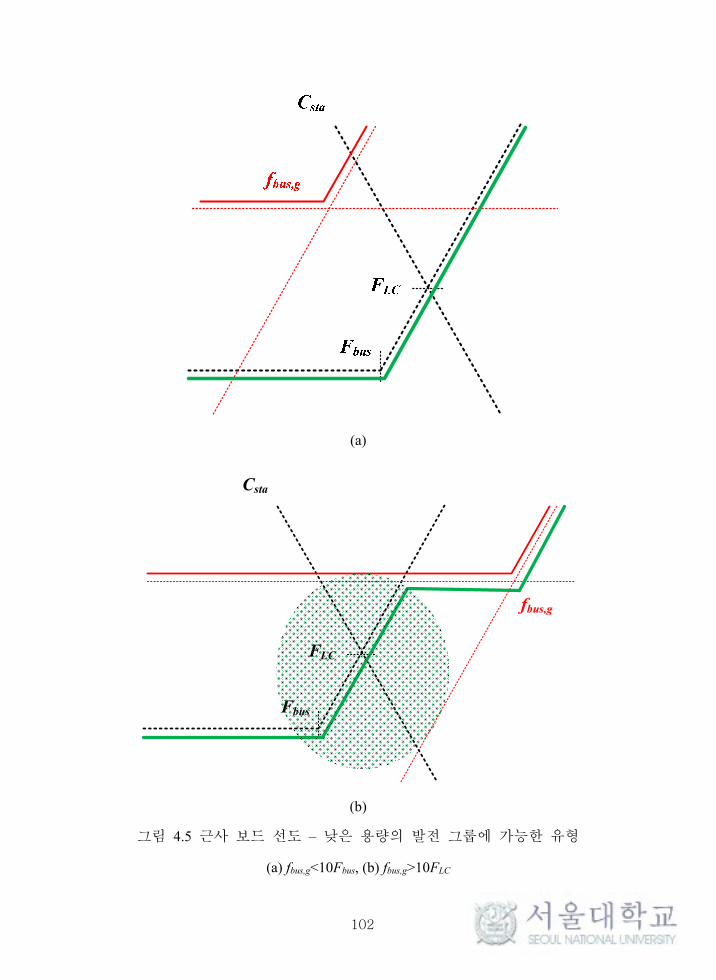
102
(a)
Csta
Fbus
FLC
fbus,g
(b)
그림 4.5 근사 보드 선도 – 낮은 용량의 발전 그룹에 가능한 유형
(a) fbus,g<10Fbus, (b) fbus,g>10FLC

103
10 kW의 용량을 가지는 전원단을 식 (4.11)와 식 (4.12)을 만족하도록
설계하는 예제는 다음과 같다. 드룹 전압 범위 20 V 기준 10 kW 컨버터
의 드룹 저항 Rd와 1% 전력 손실 기준 케이블 저항 Rs는
0.76
0.14d
c
R
R
(4.13)
이며, 전원단 대역폭을 각각 500Hz로 가정한다. 식 (4.11)와 (4.12)의 발전
그룹의 대역폭을 10배를 기준으로 생각하면 버스 대역폭 및 필요한 인덕
턴스 값은 다음과 같다.
, 1410
10
busbus g
g
ff Hz
L mH
(4.14)
는 (4.11)에 해당하며,
, 10 3
48
bus g LC
g
f f kHz
L H
(4.15)
는 (4.12)에 해당한다. 각각의 경우에 해당하는 발전 그룹의 출력 임피던
스와 버스에 연결한 후의 버스 임피던스는 그림 4.6과 그림 4.7에 나타난
다.

104
-40
-20
0
20
40
100 101 102 103-45
0
45
90
Ref.Gen.Bus
Bode Diagram
Frequency (Hz)
그림 4.6 식 (4.14)를 만족시키는 10kW 발전 그룹이 연결된 경우 버스
보드 선도
-40
-30
-20
-10
0
10
101 102 103 104-45
0
45
90
Ref.Gen.Bus
Bode Diagram
Frequency (Hz)
그림 4.7 식 (4.15)를 만족시키는 10kW 발전 그룹이 연결된 경우 버스
보드 선도

105
두 경우 모두 기존 버스의 대역폭 특징이 그대로 유지되어 발전 그
룹의 설계로 적합하다는 것을 알 수 있다. 특히 식 (4.15)를 만족하는 경
우에는 전반적인 위상 특성이 향상되었는데 이는 높은 주파수에서 형성
되는 영점으로 인해 위상특성이 개선되었기 때문이다.
4.2.2.2 150kW 전원단 컨버터
두 번째는 기준 그룹과 비슷한 용량을 가진 전원단이 발전 그룹으로
연결되는 경우에 해당한다. 같은 배전 라인에 접속되면서 용량이 비슷하
면, 드룹 저항 크기가 비슷하므로 해당 경우에도 대역폭을 기준으로 하
게 되면 그림 4.5의 설계가 모두 가능하다. 하지만, 그림 4.5(b)의 설계를
하기 위해 필요한 조건인 식 (4.12)를 Case 2에서 만족시키는 것은 현실
적으로 어려운 점이 존재한다. 대역폭 성능이 최대로 설계된 기준 그룹
의 용량과 비슷한 상황에서 훨씬 높은 대역폭 조건이 요구되기 때문에
이를 설계하는 일은 일반적이지 않다. 따라서, Case 2에서의 전원단의 설
계는 그림 4.8로 제한된다.
그림 4.8는 전원단이 다음과 같은 대역폭을 가진 경우에 해당한다.
, 10bus g busf f (4.16)
발전 그룹의 대역폭이 기준 대역폭보다 매우 작은 경우로 Rd가 비슷한
상태이므로 선로 길이가 더 길거나, 추가적인 필터 요소로 인해 케이블
에 인덕턴스가 커진 경우에 해당한다. 그림 4.8(a)와 동일하게 더 작은
기준 그룹의 임피던스로 인해 전체 임피던스는 발전 그룹이 붙어도 그대
로 유지되며, 전체 시스템의 특성 또한 기존 대역폭을 유지한다.

106
그림 4.8 근사 보드 선도 – 비슷한 용량의 발전 그룹에 가능한 유형
150 kW의 용량을 가지는 전원단을 식 (4.16)를 만족하도록 설계하는
예제는 다음과 같다. 드룹 전압 범위 20V 기준 150 kW 컨버터의 드룹
저항 Rd와 1% 전력 손실 기준 케이블 저항 Rs는
50
9.6d
s
R m
R m
(4.17)
이며, 전원단 대역폭은 1kHz로 가정한다. 식 (4.16)를 10배 기준으로 생
각하면 버스 대역폭 및 필요한 인덕턴스 값은 다음과 같다.
, 1410
677
busbus g
g
ff Hz
L H
(4.18)

107
그림 4.9은 식 (4.18)을 파라미터로 가지는 발전 그룹이 버스에 붙었
을 때의 임피던스 보드 선도를 나타낸다. 대역폭 차이로 인해 버스 임피
던스는 기존의 임피던스에서 크게 벗어나지 않으며, 시스템의 특성을 유
사하게 유지하는 것을 알 수 있다.
한편, 용량이 커질수록 추가적인 필터 인덕터를 추가하는 것이 어려
워지기 때문에 그림 4.8에서 발전 그룹의 대역폭 fbus,g가 Fbus와 비슷한 경
우를 가정한다면, 기준 그룹의 전원단이 2개에서 3개로 늘어난 것과 동
일한 모습이 된다. 이 때, Fbus와 Fbw는 유지되지만 Leq의 변화로 인해 FLC
가 바뀌기 때문에 Ksta가 변해 이미 설계된 부하들에 대해 안정성에 영향
을 줄 가능성이 발생하게 된다. 따라서 이 경우는 변한 Leq를 보상할 수
있는 추가적인 캐패시턴스를 배전단에 추가해 FLC 값을 유지하거나, 처
음부터 추가 확장 용량에 대한 여유도를 가지고 설계를 해 Ksta에 여유도
를 주면서 부하 설계를 고려하는 것이 필요하다.
Mag
nitu
de (
dB)
Pha
se (
deg)
그림 4.9 150kW 발전 그룹이 연결된 경우 버스 보드 선도
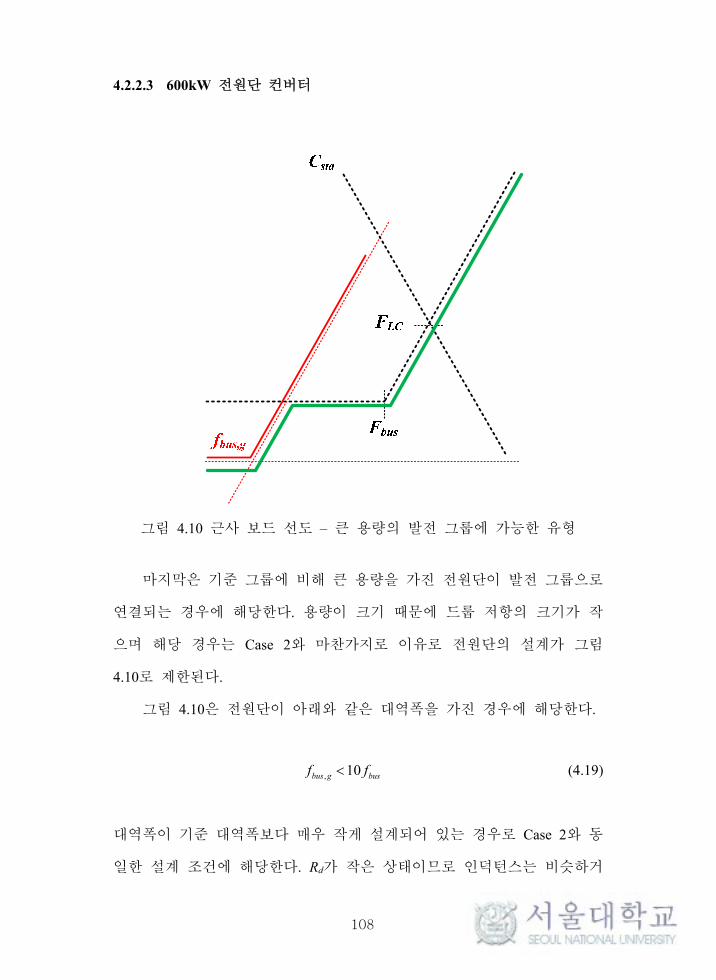
108
4.2.2.3 600kW 전원단 컨버터
그림 4.10 근사 보드 선도 – 큰 용량의 발전 그룹에 가능한 유형
마지막은 기준 그룹에 비해 큰 용량을 가진 전원단이 발전 그룹으로
연결되는 경우에 해당한다. 용량이 크기 때문에 드룹 저항의 크기가 작
으며 해당 경우는 Case 2와 마찬가지로 이유로 전원단의 설계가 그림
4.10로 제한된다.
그림 4.10은 전원단이 아래와 같은 대역폭을 가진 경우에 해당한다.
, 10bus g busf f (4.19)
대역폭이 기준 대역폭보다 매우 작게 설계되어 있는 경우로 Case 2와 동
일한 설계 조건에 해당한다. Rd가 작은 상태이므로 인덕턴스는 비슷하거

109
나 큰 경우에 해당한다. 전체 버스 임피던스가 주파수에 따라 다른 모양
을 나타내지만, 시스템 대역폭 fLC와 만나는 지점이 기준 대역폭의 특징
이 나타나는 지점이므로 전체 시스템 특성은 기존 특성을 유지한다.
600kW의 용량을 가지는 전원단을 식 (4.14)를 만족하도록 설계하는
예제는 다음과 같다. 드룹 전압 범위 20V 기준 600kW 컨버터의 드룹 저
항 Rd와 1% 손실 기준 케이블 저항 Rc는
12.7
3d
c
R m
R m
(4.20)
이며, 전원단 대역폭은 50Hz로 가정한다. 식 (4.19)을 10배 기준으로 생
각하면 버스 대역폭 및 필요한 인덕턴스 값은 다음과 같다.
, 1410
210
busbus g
g
ff Hz
L H
(4.21)
그림 4.11는 식 (4.19)를 파라미터로 가지는 발전 그룹이 버스에 붙
었을 때의 임피던스 보드 선도를 나타낸다. 저 주파수에서 위상이 일찍
상승하는 것을 볼 수 있는데 그림 4.9에서는 기준 대역폭 fbus 이전 주파
수까지는 저항의 성격을 나타내 평평하게 크기가 그려졌던 것에 비해,
그림 4.11에서는 fbus,g로 인해 위상이 미리 상승하기 때문이다. 그럼에도
불구하고 fLC 부근에서의 위상은 기존과 크게 다르지 않기 때문에 전체
버스 특성에 큰 영향을 주지 않는다고 할 수 있다. 하지만 그림 4.11의
사례를 통해 기준 그룹의 용량을 한참 벗어나는 시스템 용량이 필요한
경우 초기 기준 그룹 설계에 충분한 여유도가 필요하다는 것을 생각할
수 있다.

110
-40
-30
-20
-10
0
10
Mag
nitu
de (
dB)
10-1 100 101 102 103-45
0
45
90
Pha
se (
deg)
Ref.Gen.Bus
Bode Diagram
Frequency (Hz)
그림 4.11 600kW 발전 그룹이 연결된 경우 버스 보드 선도
-60
-40
-20
0
20
Mag
nitu
de (
dB)
100 101 102 103 104-45
0
45
90
Pha
se (
deg)
Ref.Bus
Bode Diagram
Frequency (Hz)
그림 4.12 모든 발전 그룹이 연결된 경우 버스 보드 선도

111
4.2.3 부하 설계
ksta를 작은 값을 사용하였으므로 부하 대역폭의 조건은 케이블 대역
폭 fcable을 반영하여
34loadf Hz (4.22)
로 주어진다. 설명한 것처럼 FLC를 만족시키는 방식에 따라 두 가지로
부하 설계가 나뉘게 된다. 각각의 경우는 고정적인 캐패시턴스가 부하단
에 존재하는 경우와 고정적인 캐패시턴스가 부하단에 없는 경우로 아래
에 서술한다.
4.2.3.1 고정적인 캐패시턴스가 있는 경우
고정적인 캐패시턴스가 시스템에 존재하여 FLC를 만족시키는 시스템
에 대해 서술한다. 고정적인 캐패시턴스는 시스템에 고정되어 있는 부하
에 포함되어 있거나, 그림 4.1의 점선으로 된 캐패시터처럼 부하단쪽에
별도로 캐패시터가 추가되어 구현이 될 수 있다. 이 경우 부하 설계에
대한 조건은 식 (4.22)만 요구된다. 예를 들어, 10kW 부하를 설계하는 경
우에는 식 (4.23)에 따라 부하단 구성이 완료된다.
2 2min 375
1410
334
LL
L
VR
P k
C F
(4.23)
112
4.2.3.2 고정적인 캐패시턴스가 없는 경우
이 경우는 FLC를 만족하는 고정적인 캐패시턴스가 시스템에 존재하
지 않는다. 따라서 경부하 상황까지 고려한다면 버스 설계로부터 정해진
FLC를 만족하기 위해서는 모든 개별 부하에서 FLC가 만족되는 캐패시턴
스를 가지고 시스템에 연결되어야 한다. 즉, 캐패시턴스에 대한 요구 조
건이 부하 설계에 대한 조건에 더해져 나타나게 되며 이는 식 (4.24)으로
요약된다.
34
( 5.6 )load
L sta
f Hz
C C mF
(4.24)
예를 들어, 10kW 부하를 동일하게 설계하는 경우에 식 (4.23)에서는
160uF의 부하 캐패시터가 요구되었지만, 식 (4.24)의 최저 캐패시턴스 조
건에 의해 고정적인 캐패시턴스가 없는 경우에는 식 (4.25)로 요약된다.
14
5.6L
L
R
C mF
(4.25)
한편, 부하단의 캐패시턴스 조건은 [64]와 같이 가상의 캐패시턴스를
만드는 제어를 적용하거나 이상적으로 가정한 CPL의 실제 속도가 반영
되는 경우 이론적으로 필요한 실제 캐패시턴스 값보다 작은 캐패시터를
통해 만족시키는 것이 가능하다. 예를 들어, 실제 CPL의 모델링을 1차
시스템으로 표현하게 되면 [63],
1 /L
cplcpl
RR
s
(4.26)

113
로 표현이 가능하며, s-term을 jw-term으로 고쳐 분모를 정리하게 되면
2
2 2 2
1(1 )
1 ( / ) 1 ( / ) 1 ( / )L L L
cplcpl cpl cpl cpl
R R RR j
j
(4.27)
과 같이 정리된다. 첫 번째 요소는 저항이고, 두 번째 요소는 캐패시턴스
로 CPL의 대역폭에 따라 가상의 캐패시턴스가 추가로 생성되는 것을 알
수 있다. 아래 그림 4.13은 CPL 대역폭을 변경시키면서 나타나는 부하
임피던스의 보드 선도에 해당한다. 그림에서 알 수 있듯이, 실제 캐패시
턴스가 커진 것처럼 보드 선도가 그려지며 이를 통해 작은 캐패시턴스를
사용하면서 동시에 요구 조건을 만족시킬 수 있게 된다.
-40
-20
0
20
40
Mag
nitu
de (
dB)
wcpl(1k)wcpl(0.1k)wcpl(10Hz)
10-1 100 101 102 103 104-180
-135
-90
Pha
se (
deg)
Bode Diagram
Frequency (Hz)
그림 4.13 식 (4.12), (4.14) 및 (4.17)을 가지는 부하 임피던스 보드 선도
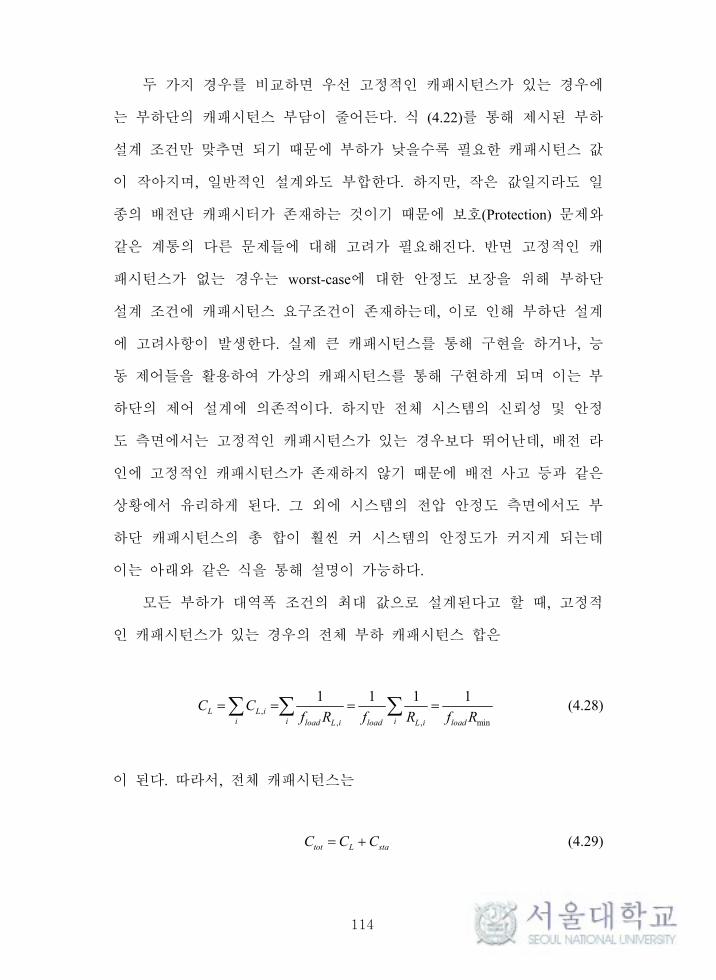
114
두 가지 경우를 비교하면 우선 고정적인 캐패시턴스가 있는 경우에
는 부하단의 캐패시턴스 부담이 줄어든다. 식 (4.22)를 통해 제시된 부하
설계 조건만 맞추면 되기 때문에 부하가 낮을수록 필요한 캐패시턴스 값
이 작아지며, 일반적인 설계와도 부합한다. 하지만, 작은 값일지라도 일
종의 배전단 캐패시터가 존재하는 것이기 때문에 보호(Protection) 문제와
같은 계통의 다른 문제들에 대해 고려가 필요해진다. 반면 고정적인 캐
패시턴스가 없는 경우는 worst-case에 대한 안정도 보장을 위해 부하단
설계 조건에 캐패시턴스 요구조건이 존재하는데, 이로 인해 부하단 설계
에 고려사항이 발생한다. 실제 큰 캐패시턴스를 통해 구현을 하거나, 능
동 제어들을 활용하여 가상의 캐패시턴스를 통해 구현하게 되며 이는 부
하단의 제어 설계에 의존적이다. 하지만 전체 시스템의 신뢰성 및 안정
도 측면에서는 고정적인 캐패시턴스가 있는 경우보다 뛰어난데, 배전 라
인에 고정적인 캐패시턴스가 존재하지 않기 때문에 배전 사고 등과 같은
상황에서 유리하게 된다. 그 외에 시스템의 전압 안정도 측면에서도 부
하단 캐패시턴스의 총 합이 훨씬 커 시스템의 안정도가 커지게 되는데
이는 아래와 같은 식을 통해 설명이 가능하다.
모든 부하가 대역폭 조건의 최대 값으로 설계된다고 할 때, 고정적
인 캐패시턴스가 있는 경우의 전체 부하 캐패시턴스 합은
,, , min
1 1 1 1L L i
i i iload L i load L i load
C Cf R f R f R
(4.28)
이 된다. 따라서, 전체 캐패시턴스는
tot L staC C C (4.29)
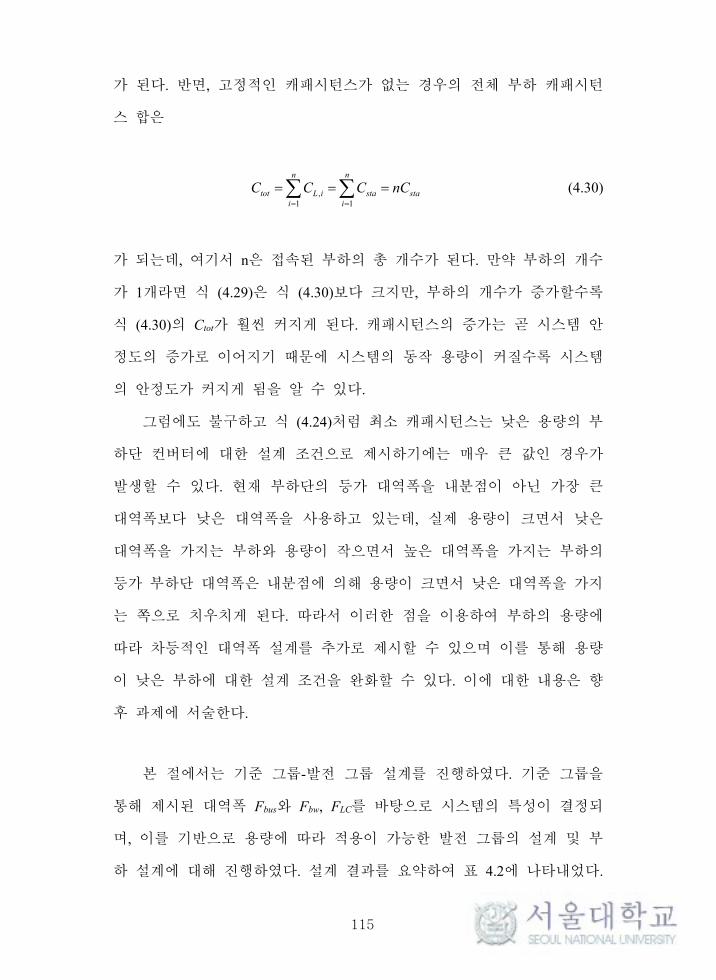
115
가 된다. 반면, 고정적인 캐패시턴스가 없는 경우의 전체 부하 캐패시턴
스 합은
,1 1
n n
tot L i sta stai i
C C C nC
(4.30)
가 되는데, 여기서 n은 접속된 부하의 총 개수가 된다. 만약 부하의 개수
가 1개라면 식 (4.29)은 식 (4.30)보다 크지만, 부하의 개수가 증가할수록
식 (4.30)의 Ctot가 훨씬 커지게 된다. 캐패시턴스의 증가는 곧 시스템 안
정도의 증가로 이어지기 때문에 시스템의 동작 용량이 커질수록 시스템
의 안정도가 커지게 됨을 알 수 있다.
그럼에도 불구하고 식 (4.24)처럼 최소 캐패시턴스는 낮은 용량의 부
하단 컨버터에 대한 설계 조건으로 제시하기에는 매우 큰 값인 경우가
발생할 수 있다. 현재 부하단의 등가 대역폭을 내분점이 아닌 가장 큰
대역폭보다 낮은 대역폭을 사용하고 있는데, 실제 용량이 크면서 낮은
대역폭을 가지는 부하와 용량이 작으면서 높은 대역폭을 가지는 부하의
등가 부하단 대역폭은 내분점에 의해 용량이 크면서 낮은 대역폭을 가지
는 쪽으로 치우치게 된다. 따라서 이러한 점을 이용하여 부하의 용량에
따라 차등적인 대역폭 설계를 추가로 제시할 수 있으며 이를 통해 용량
이 낮은 부하에 대한 설계 조건을 완화할 수 있다. 이에 대한 내용은 향
후 과제에 서술한다.
본 절에서는 기준 그룹-발전 그룹 설계를 진행하였다. 기준 그룹을
통해 제시된 대역폭 Fbus와 Fbw, FLC를 바탕으로 시스템의 특성이 결정되
며, 이를 기반으로 용량에 따라 적용이 가능한 발전 그룹의 설계 및 부
하 설계에 대해 진행하였다. 설계 결과를 요약하여 표 4.2에 나타내었다.

116
Fbus와 Fbw가 클수록 모든 조건들이 완화되기 때문에 기준 그룹의 대역폭
을 크게 만들 수 있다면 직류 배전 시스템의 설계 조건을 완화시킬 수
있다.
표 4.2 기준 그룹-발전 그룹 시스템 설계 결과
대상 변수 값
기준 그룹 (200kW)
fbus,r 143 Hz
fbw,r 100 Hz
fLC,r 300 Hz
ksta,r 0.1
발전 그룹
10 kW fbus,g 14 Hz
fbw,g 0.5 kHz
10 kW fbus,g 3 kHz
fbw,g 0.5 kHz
150 kW fbus,g 14 Hz
fbw,g 100 Hz
600 kW fbus,g 14 Hz
fbw,g 50 Hz
부하 fload 33 Hz
Csta 5.6 mF

117
4.3 시스템 설계 2 – 가상 그룹
Source
Source
Virtual Group
fbus
fbw Load
Load
fload
fLCfbus,v1
fbw,v1
fbus,vi
fbw,vi
그림 4.14 가상 그룹 기반 직류 배전 시스템의 구조
본 절에서는 가상 그룹에 기반한 시스템 설계를 진행한다. 가상 그
룹에 기반한 시스템은 그림 4.14와 같은 구조로 되어 있다. 전원단이 별
도의 그룹으로 분리되지 않으며 부하단은 기준 그룹-발전 그룹 시스템과
동일한 구조이다. 따라서 부하단의 설계는 앞 절에서 제시한 것과 동일
하며, 본 절에서는 버스 설계에 해당하는 내용을 서술한다. 그리고 기준
그룹이 존재하는 설계 1과 가상 그룹을 기반으로 하는 설계 2의 장/단점
에 대해 논의한다.
4.3.1 버스 설계 – 가상 그룹
가상 그룹에 기반한 설계는 가상의 전원단이 존재한다고 가정하여
버스의 worst-case 특성인 Fbus, Fbw, FLC, Ksta를 제시한다고 가정한다. 그리
고 설계되는 가상 그룹은 제시되는 버스의 특성을 유지하거나 향상시키
는 방향으로 설계된다. 따라서 가상 그룹의 설계 조건은 앞 절에서 다룬
발전 그룹의 설계 조건과 유사하다. 하지만, 버스의 worst-case 특성을 제

118
시하는 전원단이 실제로는 존재하지 않기 때문에 대역폭이 낮은 경우를
붙이는 그림 4.5(a)와 같은 경우는 적용이 불가능하다. 이로 인해 대역폭
이 높은 전원단을 붙이는 것만 허용되므로 가능한 경우는 그림 4.5(b)로
한정되며, 가상 그룹의 설계 조건은 다음과 같이 주어진다.
,
,
10bus v LC
bw v LC
f F
f F
(4.31)
100kW 용량을 가지는 전원단을 설계하는 예제는 다음과 같다.
100kW에 해당하는 가상의 기준 그룹이 있다고 할 때, 표 4.2를 참고해
worst-case 특성을 아래와 같이 설정한다.
150
100
300
bus
bw
LC
F Hz
F Hz
F Hz
(4.32)
100kW에 해당하는 드룹 저항 Rd와 케이블 저항 Rs는 식 (4.8)과 동일하
며, 따라서 식 (4.31)과 식 (4.32)를 참고하면 다음과 같은 설계 조건을
얻을 수 있다.
,
,
3
100
5
bus v
bw v
s
f kHz
f Hz
L H
(4.32)
그림 4.15는 식 (4.32)로 설계된 버스의 임피던스와 가상의 버스에 해당
하는 보드 선도를 나타낸다.
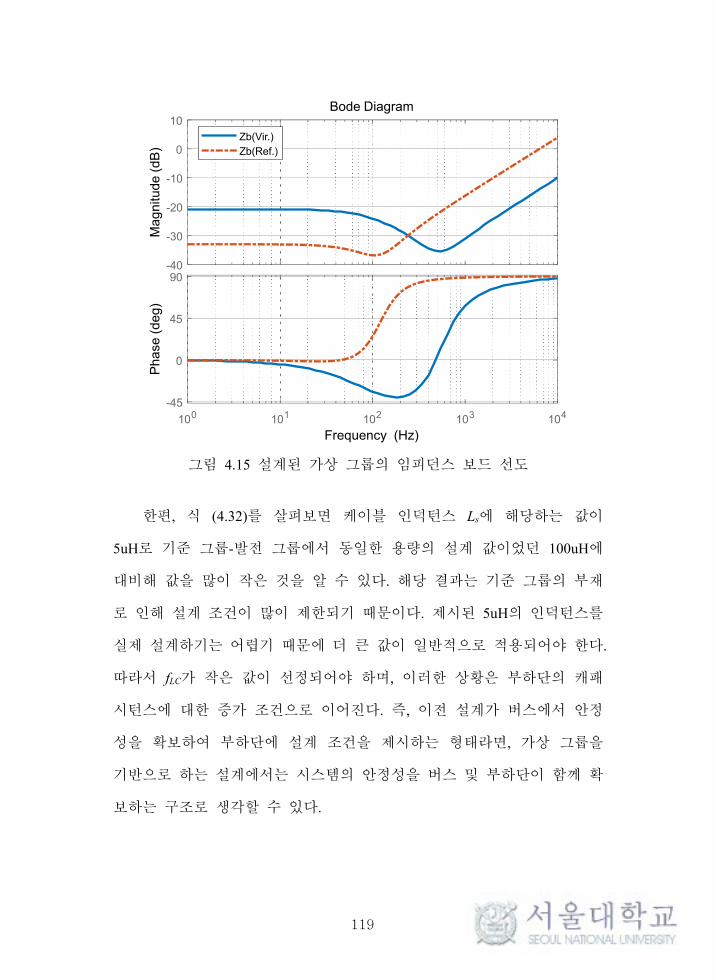
119
-40
-30
-20
-10
0
10
Mag
nitu
de (
dB)
Zb(Vir.)Zb(Ref.)
100 101 102 103 104-45
0
45
90
Pha
se (
deg)
Bode Diagram
Frequency (Hz)
그림 4.15 설계된 가상 그룹의 임피던스 보드 선도
한편, 식 (4.32)를 살펴보면 케이블 인덕턴스 Ls에 해당하는 값이
5uH로 기준 그룹-발전 그룹에서 동일한 용량의 설계 값이었던 100uH에
대비해 값을 많이 작은 것을 알 수 있다. 해당 결과는 기준 그룹의 부재
로 인해 설계 조건이 많이 제한되기 때문이다. 제시된 5uH의 인덕턴스를
실제 설계하기는 어렵기 때문에 더 큰 값이 일반적으로 적용되어야 한다.
따라서 fLC가 작은 값이 선정되어야 하며, 이러한 상황은 부하단의 캐패
시턴스에 대한 증가 조건으로 이어진다. 즉, 이전 설계가 버스에서 안정
성을 확보하여 부하단에 설계 조건을 제시하는 형태라면, 가상 그룹을
기반으로 하는 설계에서는 시스템의 안정성을 버스 및 부하단이 함께 확
보하는 구조로 생각할 수 있다.

120
4.3.2 설계 1과 설계 2의 비교
현재 부하단의 대역폭 조건은 4.2절의 설계와 4.3절의 설계에서 동일
한 상황이다. 따라서, 전원단 설계 조건의 비교를 통해 각 방법의 장단점
에 대해서 비교한다.
먼저 기준 그룹을 바탕으로 한 첫 번째 설계는 기준을 설정해주는
물리적인 버스가 존재하기 때문에 발전 그룹 설계가 용이하다. 현실적인
제약을 제외한다면 발전 그룹의 용량에 따라 자유로운 대역폭 설계가 가
능하기 때문에 시스템 설계의 제약이 없다. 하지만, 기준이 되는 물리적
인 버스의 존재로 인해 생기는 제약은 용량 확장의 한계에 존재한다. 기
준 그룹을 통해 설정된 worst-case의 안정도 이상의 시스템 확장을 위해
선 제시되는 설계 조건보다 더 큰 제약으로 설계를 해야 하기 때문에 구
현하는 것에 힘든 점이 존재하게 된다. 또한 본 논문에서 기반으로 하는
소신호 분석에서는 관찰되지 않지만, 기준 그룹에 비해 대역폭이 느린
발전 그룹이 많이 연결되는 경우에는 기준 그룹 용량에 비해 큰 과도 응
답(Load Transient)에 대해서 시스템이 불안정해 질 가능성이 존재한다. 따
라서 해당 설계는 설치 용량과 확장 용량이 제한적인 응용분야에 적합하
다는 것을 알 수 있다.
반면 가상 그룹을 바탕으로 한 두 번째 설계는 기준을 설정하는 물
리적인 버스가 존재하지 않으므로 설계 조건에 제약이 발생한다. 따라서
제한된 설계만이 가능하며, 이로 인한 설계는 기준 그룹이 존재하는 첫
번째 설계와 비교했을 때 과도한 설계(Over Design)가 된다. 하지만, 가상
그룹 스스로가 안정성을 확보하면서 버스에 연결되기 때문에 용량 확장
에 제한이 발생하지 않는다는 장점이 존재한다. 또한 과도 응답에 대한
반응이 원활하기 때문에 시스템 안정성 면에서 첫 번째 설계에 비해 유
리한 측면이 존재한다. 해당 설계는 시스템 용량이 정해지지 않은 응용

121
분야로 예를 들면 직류 계통 등과 같은 큰 시스템에 적합한 설계 방법이
된다. 따라서, 3.5절에서 다루었던 직류 계통에 대한 대역폭 정의 및 접속
규정 제시는 가상 그룹에 기반하는 경우 잘 정의될 수 있다.
122
4.4 모의 실험 결과
그림 4.16 모의 실험 회로도
본 절에서는 모의 실험을 통해 대역폭 설계의 유효성 및 시스템 설
계의 결과를 검증한다. 그림 4.16와 표 4.3은 모의 실험에 사용된 회로와
파라미터를 나타낸다. 출력 임피던스가 1차 시스템을 나타내는 간단화된
I-V 드룹 제어를 사용하였다. 이 경우에 전원단의 제어 대역폭은 출력
캐패시턴스에 의해 조절되기 때문에 표 4.3에서 제어 대역폭이 낮을수록
출력 캐패시턴스 값이 크게 설계되어 있는 것을 확인할 수 있다. 기준
그룹은 2개의 100kW 전원단이 병렬로 구성되어 있으며, 발전 그룹은 용
량에 따라 10kW / 150kW / 600kW를 가정한다. 가상 그룹은 100kW 전원
단으로 구성되어 있는 것으로 설계되었다. 부하에서는 버스 캐패시터인
Csta가 있는 경우와 없는 경우에 대해 동작 검증을 진행한다.
먼저 대역폭과 전압 안정도 관계식의 유효성을 알아보기 위해 모의
실험을 진행한다. 대역폭을 기준으로 안정된 설계를 확인한 후 fbus, ksta,

123
fload를 변화시키면서 회로의 안정도를 확인한다. 발전 그룹이 추가되는
경우에 시스템의 안정성이 유지되는지에 대해 모의 실험을 통해 확인한
다. 그리고 가상 그룹의 시스템 동작을 확인한다.
표 4.3 모의 실험 회로 파라미터
대상 파라미터 값
Reference group
(Source 1,2)
Vref 400 V
Pmax 100 kW
kd1,kd2 13.15
Limit 0(min)/290(max)
Cs1,Cs2 21 mF
Rs1,Rs2 14 mΩ
Ls1,Ls2 100 uH
Generating group
Vref 400 V
Pmax
(10kW)
kd 1.316
Limit 0(min)/29(max)
Cs 84 uF
Rs 0.14 Ω
Ls 10 mH / 48 uH
Pmax
(150kW)
kd 20
Limit 0(min)/420(max)
Cs 32 mF
Rs 9.6 mΩ
Ls 677 uH
Pmax
(600kW)
kd 78.74
Limit 0(min)/1600(max)

124
Cs 250 mF
Rs 3 mΩ
Ls 210 uH
Virtual group Pmax
(100kW)
kd 13.15
Limit 0(min)/270(max)
Cs 1 mF
Rs 14 mΩ
Ls 3 uH
Load fload 33Hz
4.4.1 대역폭과 전압 안정도 결과
기준 그룹과 부하로 구성된 시스템에서 기준 그룹의 용량인 200 kW
부하가 연결된 경우 모의 실험을 한 결과를 보인다. 별도의 배전단 캐패
시턴스는 없다고 가정하며, 200 kW 부하에 대해 필요한 부하 캐패시턴스
는 아래와 같이 계산된다.
2min
max
0.7
16.9
2
L
Lload L
VR
P
C mFf R
(4.33)
표 4.2에 설계된 값에 기반한 그림 4.17의 나이퀴스트 선도로부터 시
스템이 안정하다는 것을 알 수 있다. 각 동작 영역에서의 소신호 응답에
대한 안정성을 살피기 위해 그림 4.18은 20kW 부하변동으로 200kW까지
의 모의 실험 결과를 나타내며 최대 부하에서 버스 정상 전압 범위로 동
작하며, 시스템이 안정하다는 것을 확인할 수 있다.
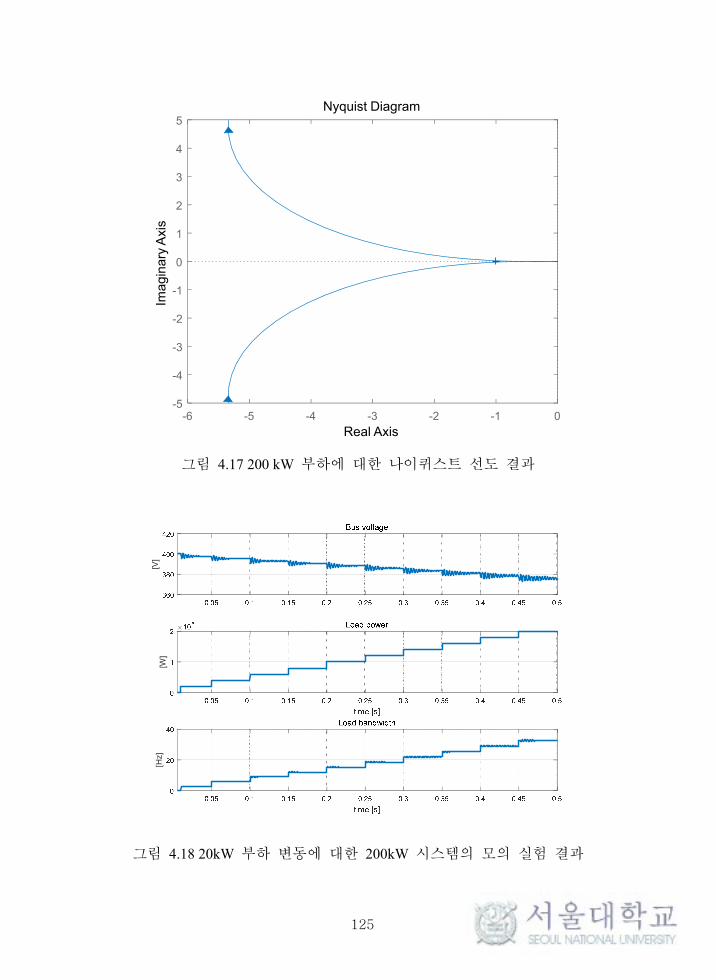
125
-6 -5 -4 -3 -2 -1 0-5
-4
-3
-2
-1
0
1
2
3
4
5Nyquist Diagram
Real Axis
Imag
inar
y A
xis
그림 4.17 200 kW 부하에 대한 나이퀴스트 선도 결과
[V]
[W]
[Hz]
그림 4.18 20kW 부하 변동에 대한 200kW 시스템의 모의 실험 결과

126
이번에는 기준 그룹의 파라미터가 변할 경우 바뀌는 대역폭으로 인
한 전압 안정도의 영향을 살펴보기로 한다. 먼저 케이블 파라미터 변동
을 가정해 케이블 인덕턴스가 기존 대비 2배 및 0.5배인 200uH와 50uH
로 변한 경우에 대한 나이퀴스트 선도 및 모의 실험 결과를 그림 4.19-
그림 4.21에서 나타낸다.
인덕턴스가 200uH가 기준 그룹의 특징은 아래와 같이 변하며
72
0.3
22
bus
sta
load
f Hz
k
f Hz
(4.34)
부하 설계 기준이 엄격해진다. 따라서, 현재 설계되어 있는 값으로 구성
된 시스템은 안정성이 감소하게 되어 그림 4.20에서 보듯이 버스 전압의
진동이 심해지다가 발산하게 된다. 버스 전압의 진동은 시스템의 대역폭
이 안정과 불안정의 경계값으로 갈수록 심해지며, 비록 진동의 유무가
전체 시스템의 수렴성과는 무관하지만, 과도 응답마다 전압 진동이 발생
하는 것은 바람직하지 않으므로 설계 후 추가적인 댐핑을 통해 진동을
줄이는 것이 요구된다. 이 결과는 앞선 식 (3.19)에서 kstafbus에 대한 미분
값이 항상 음수이므로 다른 변수가 동일할 때 Ls값이 증가하면 fload가 감
소하는 것과 일치하는 결과이다. 따라서 반대로 인덕턴스를 50uH로 줄이
게 되면 기준 그룹의 특징은
296
0.05
58
bus
sta
load
f Hz
k
f Hz
(4.35)
가 되어 fload 기준이 완화되며, 그림 4.21처럼 시스템은 더 안정해진다.

127
-15 -10 -5 0-10
-5
0
5
10Nyquist Diagram
그림 4.19 Ls 변동에 대한 나이퀴스트 선도 결과
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5250
300
350
400
450
500
[V]
Bus voltage
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.5
1
1.5
2
[A]
105 Load Power
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
time [s]
0
20
40
60
80
[Hz]
Load Bandwidth
그림 4.20 Ls(200uH)에 대한 모의 실험 결과

128
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5370
380
390
400
410
[V]
Bus voltage
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.5
1
1.5
2
[A]
105 Load Power
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
time [s]
0
10
20
30
40
[Hz]
Load Bandwidth
그림 4.21 Ls(50uH)에 대한 모의 실험 결과
이번에는 전원단 대역폭인 fbw가 대역폭에 미치는 영향을 살펴보기
위해 기존 대역폭인 100Hz를 50Hz로 줄이는 결과로 나타나는 나이퀴스
트 선도와 시뮬레이션을 그림 4.22와 그림 4.23에 나타낸다. fbw를 50Hz로
줄이면 ksta의 감소로 인해 시스템이 불안정해진다. 모의 실험 결과에서
시스템이 발산하는 것을 확인할 수 있다.

129
-15 -10 -5 0
-10
0
10
Nyquist Diagram
그림 4.22 기준 그룹의 fbw 변동에 대한 나이퀴스트 선도 결과
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5340
360
380
400
420
[V]
Bus voltage
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.5
1
1.5
2
[A]
105 Load Power
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
time [s]
0
10
20
30
40
[Hz]
Load Bandwidth
그림 4.23 fbw(50Hz)에 대한 모의 실험 결과
130
4.4.2 배전단 캐패시턴스(Csta) 유무에 따른 차이
배전 시스템의 구조에 따라 부하 설계 조건을 주는 방법으로 대역폭
조건만을 제시할 수도 있고, 대역폭 조건에 추가로 캐패시턴스 요구 조
건을 같이 제시할 수도 있다. 모의 실험을 통해 두 경우에 대해 검증한
다.
먼저 Csta(5.6mF)가 존재하는 시스템에서 10kW 부하가 연결되어 있
는 경우, 부하에 대한 캐패시턴스 값은 아래와 같다.
10 340kC F (4.36)
이 경우는 기준 그룹에서 설정한 시스템 대역폭인 fLC가 Csta로 보장되기
때문에, 부하 캐패시턴스에 대한 요구사항이 존재하지 않는다. 그로 인해
주어진 fload 기준만 만족하면 시스템은 안정성을 만족하게 된다. 그림
4.24는 10kW 부하에 대한 나이퀴스트 선도 결과로 안정하게 나타나고,
그림 4.25의 시뮬레이션 결과 역시 10kW 부하에서 수렴하는 것을 확인
할 수 있다.
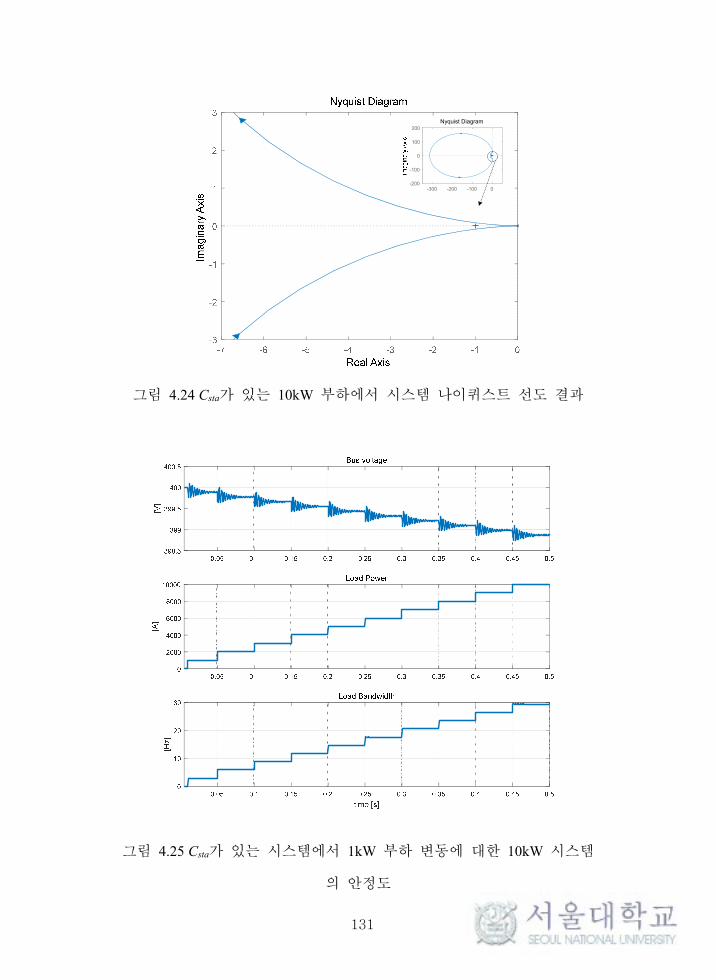
131
-300 -200 -100 0-200
-100
0
100
200Nyquist Diagram
그림 4.24 Csta가 있는 10kW 부하에서 시스템 나이퀴스트 선도 결과
그림 4.25 Csta가 있는 시스템에서 1kW 부하 변동에 대한 10kW 시스템
의 안정도

132
이번에는 배전단에 고정되어 있는 캐패시터 Csta가 없는 경우를 살펴
보자. 10kW 부하가 식 (4.36)의 캐패시턴스로 시스템에 연결되어 있는 경
우에 시스템 나이퀴스트 선도 결과는 그림 4.26에 나타난다.
나이퀴스트 선도 결과 10kW 부하만 접속이 되어 있는 경우 (-1,0)을
시계 방향으로 감싸 시스템이 불안정하게 나타난다. 또한 그림 4.27의 시
뮬레이션 결과에서도 시스템이 10kW에서 발산하는 것을 확인할 수 있다.
이 결과는 시스템의 fLC값이 고정되어 있지 않았기 때문에 발생하는 것
으로 10kW 부하가 연결된 경우 캐패시턴스 값이 작기 때문에 fLC값이 커
져 대역폭 설계를 만족시키지 못했다는 것을 알 수 있다. 시스템의 부하
가 클 때는 발생하지 않지만 경부하로 갈수록 안정성에 문제가 생긴다.
따라서 모든 부하에 캐패시턴스 조건이 요구되며, 이를 위한 일반적인
방법으로 실제 캐패시턴스를 증가시키는 방법과 부하 컨버터에 대한 제
어를 통해 가상의 캐패시턴스를 늘리는 방법이 있다. 부하 컨버터의 동
특성을 느리게 만드는 방법을 통해 10kW 부하가 아래와 같은 파라미터
를 가진다고 할 때,
14
(1 / )
2 50 /
340
Lcpl
cpl
L
Rs
rad s
C F
(4.37)
모의 실험 결과는 그림 4.28로 나타나며, 가상의 캐패시턴스로 인해
시스템이 안정적으로 동작한다는 것을 확인할 수 있다.

133
-300 -200 -100 0-200
-100
0
100
200Nyquist Diagram
그림 4.26 Csta가 없는 시스템에서의 10kW 부하에 대한 나이퀴스트 선도
그림 4.27 Csta가 없는 시스템에서 1kW 부하 변동에 대한 10kW 시스템
의 안정도
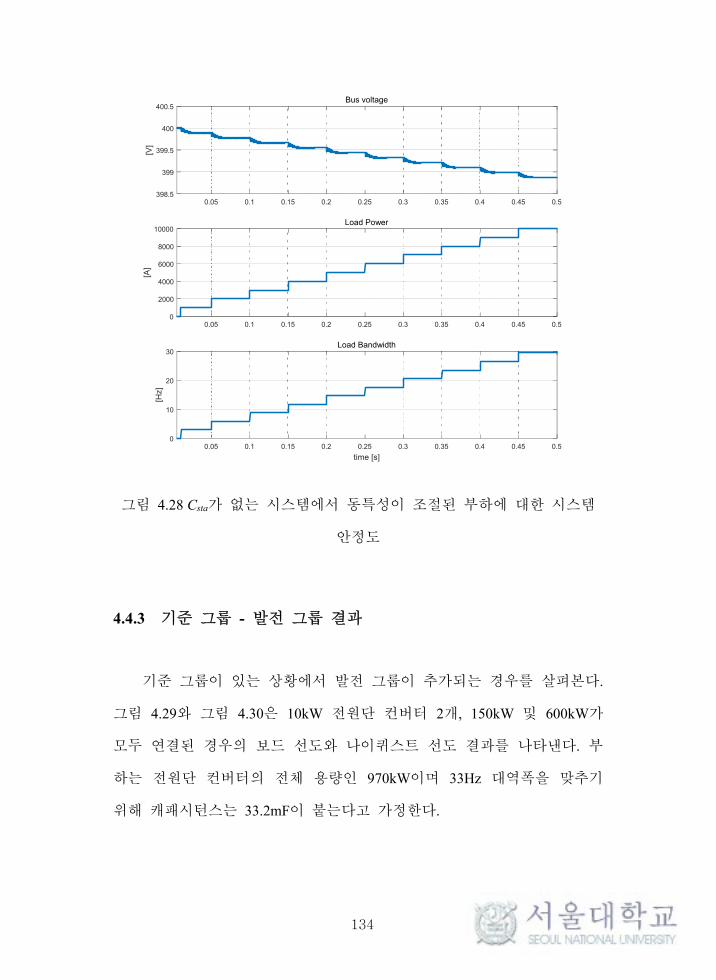
134
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5398.5
399
399.5
400
400.5
[V]
Bus voltage
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
2000
4000
6000
8000
10000
[A]
Load Power
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
time [s]
0
10
20
30
[Hz]
Load Bandwidth
그림 4.28 Csta가 없는 시스템에서 동특성이 조절된 부하에 대한 시스템
안정도
4.4.3 기준 그룹 - 발전 그룹 결과
기준 그룹이 있는 상황에서 발전 그룹이 추가되는 경우를 살펴본다.
그림 4.29와 그림 4.30은 10kW 전원단 컨버터 2개, 150kW 및 600kW가
모두 연결된 경우의 보드 선도와 나이퀴스트 선도 결과를 나타낸다. 부
하는 전원단 컨버터의 전체 용량인 970kW이며 33Hz 대역폭을 맞추기
위해 캐패시턴스는 33.2mF이 붙는다고 가정한다.

135
-80
-60
-40
-20
0
20Zb(Bus)Zb(Ref.)Zl
100 101 102 103 104-180
-90
0
90
Bode Diagram
Frequency (Hz)
그림 4.29 기준 그룹(200kW), 발전 그룹(770kW)과 부하(950kW)에 대한
보드 선도
-16 -14 -12 -10 -8 -6 -4 -2 0-2
-1.5
-1
-0.5
0
0.5
1
1.5
2Nyquist Diagram
Real Axis
Imag
inar
y A
xis
그림 4.30 기준 그룹(200kW), 발전 그룹(770kW)과 부하(950kW)에 대한
나이퀴스트 선도 결과

136
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1360
370
380
390
400
410
[V]
Bus voltage
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4
6
8
10
[A]
105 Load Power
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
time [s]
0
10
20
30
40
[Hz]
Load Bandwidth
그림 4.31 950kW 부하변동까지의 모의 실험 결과
그림 4.31은 부하 변동을 통해 동작영역에 따른 소신호 외란을 검증
하는 파형으로 시스템이 최대 용량까지 안정도를 유지하는 것을 확인
할 수 있다. 따라서 제안된 방법을 사용하게 되면 개별 시스템의 안정
도만을 고려해 설계 기준을 통해 배전 시스템에 연결하는 경우 전체
시스템 안정도를 고려하지 않아도 된다. 다만, 버스와 부하단 사이의
위상 차이가 충분하지 않아 최대부하로 갈수록 시스템의 진동이 커지
는 현상이 관찰된다. 하지만 현재 단일 부하로 이루어진 상황으로, 단
일 부하는 가장 작은 캐패시턴스 값을 전체 시스템에 나타내기 때문에
worst-case에 해당한다. 따라서, 작은 용량들의 합으로 전체 용량이 구
현되는 경우에는 개별 부하들의 캐패시턴스의 합이 훨씬 커지기 때문
에 실제로는 안정도 여유를 충분히 확보할 수 있다.

137
4.4.4 가상 그룹 결과
기준 그룹으로 시스템이 구성되는 경우를 살펴본다. 표 4.4에 따라
동일한 부하 조건이 주어지는 경우에 그림 4.32와 그림 4.33은 100kW 용
량을 가진 가상 그룹이 10개가 연결되어 전체 1MW 시스템을 구성하는
경우에 1MW 부하에 해당하는 보드 선도 및 나이퀴스트 선도로 시스템
이 여유도를 가진 상태로 안정하다는 것을 확인할 수 있다. 해당 결과는
가상 그룹의 설계의 제한적인 특징으로 인해 기준 그룹 방식에 비해 충
분한 여유도를 가지기 때문에 나타난다. 그림 4.34는 모의 실험 결과를
나타내며, 모든 동작 영역에서 시스템 안정도가 유지되는 것을 알 수 있
다. 특히, 가상 그룹을 기반으로 한 결과에서는 전압 진동이 발생하지 않
는데 해당 결과는 그림 4.32에서 확인할 수 있듯이 충분한 위상 차이가
안정도의 여유도를 증가시키기 때문이다.
그림 4.32 가상 그룹 설계에서 1MW 용량에 대한 버스와 부하의
임피던스 보드 선도

138
-16 -14 -12 -10 -8 -6 -4 -2 0 2 4-15
-10
-5
0
5
10
15Nyquist Diagram
Real Axis
Imag
inar
y A
xis
그림 4.33 1MW 용량에 대한 버스와 부하의 나이퀴스트 선도
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1370
380
390
400
410
[V]
Bus voltage
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
2
4
6
8
10
[A]
105 Load Power
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
time [s]
0
10
20
30
40
[Hz]
Load Bandwidth
그림 4.34 1MW 용량에 해당하는 모의 실험 결과

139
4.5 현실적인 고려사항
4.5.1 디지털 제어의 시 지연(Time delay)
디지털 프로세서에 기반하여 제어기를 구성하는 경우 샘플링 지연
(Sampling delay) 및 연산 지연 (Computational delay)이 발생한다. 샘플링
주기를 Tsamp라고 할 때, 전체 시 지연 Hd는 0.5샘플링 주기인 샘플링 지
연과 1샘플링 주기의 연산 지연의 합으로 표현되며, Pade approximation을
사용해 아래와 같이 표현할 수 있다.
1.5 1 0.75
1 0.75sampsT samp
dsamp
sTH e
sT
(4.38)
시 지연은 위상 감소로 연결되며, 주파수에 따른 위상 감소는
360 1.5od sampT f (4.39)
와 같이 표현된다. 단일 샘플링 (Single sampling)에서 샘플링 주기는 스위
칭 주기 Tsw와 동일하며 스위칭 주파수의 1/10 지점에서 위상이 54o만큼
줄어든다. 더블 샘플링 (Double sampling)이 사용되는 경우 샘플링 주기는
스위칭 주기의 절반과 동일하고 스위칭 주파수의 1/10 지점에서 위상이
27o만큼 줄어든다.
그림 4.35는 벅 컨버터를 가정하여 시 지연을 반영한 V-I 드룹 제어
구조이며, 표 4.4는 본 절의 분석에서 사용되는 파라미터를 나타낸다. 시
지연이 고려되는 경우 발생할 수 있는 차이를 알아보기 위해, 그림 4.36-
그림 4.39는 더블 샘플링이 적용된 경우와 시 지연이 고려되지 않은 경

140
우에 대해 전류루프 게인 Ti, 전압루프 게인 Tv, 출력 임피던스 Zo 및 버
스 임피던스 Zb를 결과를 나타낸다.
그림 4.36은 시 지연으로 인한 위상 감소로 인해 2.5kHz 전류 대역
폭에서 위상이 80o에서 약 54o로 감소한 결과를 나타낸다. 그리고 그림
4.37은 Tv에 해당하는 결과로 전압 대역폭과 위상이 300Hz 및 63o로 동
일한 것을 알 수 있다. 일반적으로 전압 루프의 대역폭은 전류 루프의
대역폭에 비해 낮으며, 전류 루프의 대역폭 역시 스위칭 주파수와 비교
하면 약 1/10정도로 낮은 값을 가지기 때문에 전압 루프에 대해서는 시
지연의 영향이 없는 것을 알 수 있다. 그림 4.38은 출력 임피던스를 나타
내며, 전반적인 개형은 동일하며 시 지연으로 인해 발생하는 위상 감소
로 인해 수kHz 부근에서의 개형이 차이를 나타내게 된다. 하지만 케이블
임피던스가 고려된 버스 임피던스의 결과인 그림 4.39에서는 동일한 보
드 선도를 나타내며, 결국 디지털 제어로 인한 시 지연은 제어기 설계의
관점에서 제어 대역폭에 영향을 줄 뿐, 그 외에 다른 영향은 고려하지
않아도 된다는 것을 알 수 있다.
그림 4.35 디지털 제어의 시 지연을 반영한 V-I 드룹 제어 구조
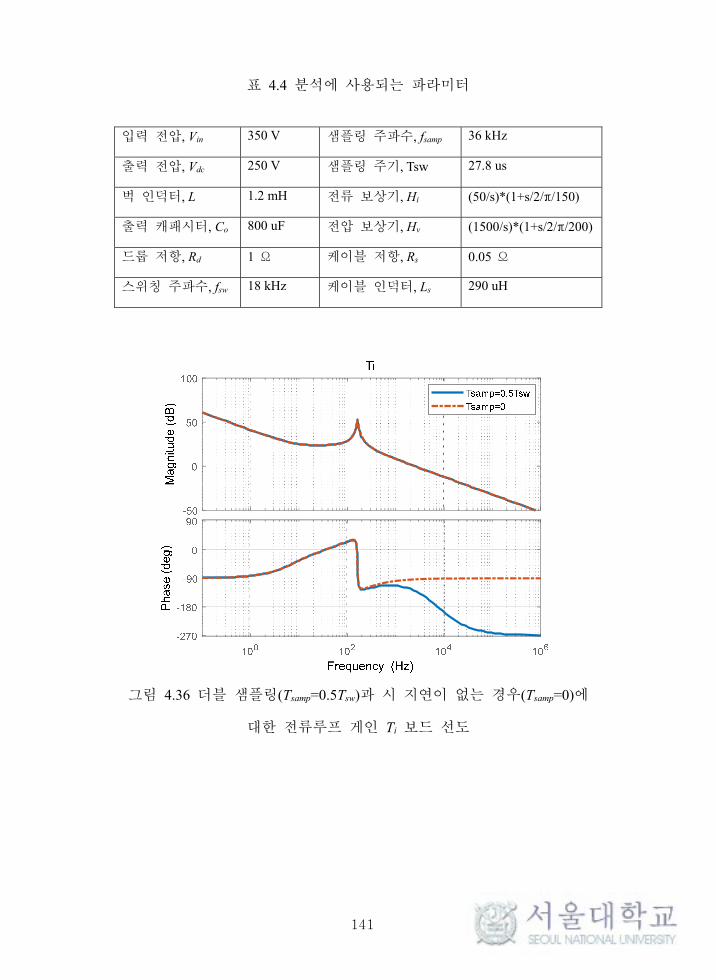
141
표 4.4 분석에 사용되는 파라미터
입력 전압, Vin 350 V 샘플링 주파수, fsamp 36 kHz
출력 전압, Vdc 250 V 샘플링 주기, Tsw 27.8 us
벅 인덕터, L 1.2 mH 전류 보상기, Hi (50/s)*(1+s/2/π/150)
출력 캐패시터, Co 800 uF 전압 보상기, Hv (1500/s)*(1+s/2/π/200)
드룹 저항, Rd 1 Ω 케이블 저항, Rs 0.05 Ω
스위칭 주파수, fsw 18 kHz 케이블 인덕터, Ls 290 uH
그림 4.36 더블 샘플링(Tsamp=0.5Tsw)과 시 지연이 없는 경우(Tsamp=0)에
대한 전류루프 게인 Ti 보드 선도

142
그림 4.37 더블 샘플링(Tsamp=0.5Tsw)과 시 지연이 없는 경우(Tsamp=0)에
대한 전압루프 게인 Tv 보드 선도
-60
-40
-20
0
20
Tsamp=0.5Tsw
Tsamp=0
100 101 102 103 104 105-180
-90
0
90
Zo
Frequency (Hz)
그림 4.38 더블 샘플링(Tsamp=0.5Tsw)과 시 지연이 없는 경우(Tsamp=0)에
대한 출력 임피던스 Zo 보드 선도

143
-20
-10
0
10
20
30
Mag
nitu
de (
dB)
Tsamp=0.5Tsw
Tsamp=0
100 101 102 103 104-45
0
45
90
135
Pha
se (
deg)
Zb
Frequency (Hz)
그림 4.39 더블 샘플링(Tsamp=0.5Tsw)과 시 지연이 없는 경우(Tsamp=0)에
대한 버스 임피던스 Zb 보드 선도
4.5.2 V-I 드룹 제어의 출력 임피던스 및 출력 전류 피드포워드
제어
2장의 모델링을 통해 지금까지 드룹 제어가 적용된 전원단의 출력
임피던스에 1차 시스템 모델을 사용하였다. 하지만 그림 2.16 및 그림
4.38에서 확인한 것과 같이 실제 출력 임피던스는 1차 시스템과 완벽히
일치하지는 않으며, 1차 시스템의 합으로 출력 임피던스가 표현된 V-I 드
룹 제어에서 두드러진 차이가 발생하게 된다. 따라서 본 절에서는 V-I
드룹 제어가 적용된 전원단의 출력 임피던스의 변화에 대하여 분석하며,
고려할 내용에 대하여 논의한다. 그리고 출력 임피던스의 변화를 줄이기
위한 방법으로 출력 전류 피드포워드 제어를 적용하는 것에 대해 분석한
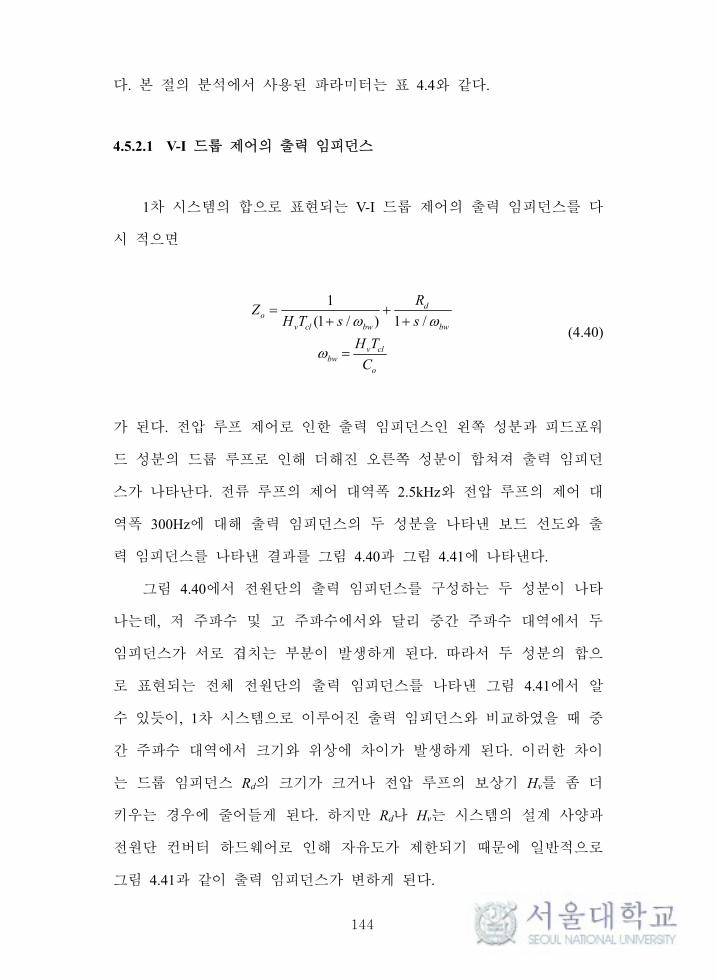
144
다. 본 절의 분석에서 사용된 파라미터는 표 4.4와 같다.
4.5.2.1 V-I 드룹 제어의 출력 임피던스
1차 시스템의 합으로 표현되는 V-I 드룹 제어의 출력 임피던스를 다
시 적으면
1
(1 / ) 1 /d
ov cl bw bw
v clbw
o
RZ
H T s s
H T
C
(4.40)
가 된다. 전압 루프 제어로 인한 출력 임피던스인 왼쪽 성분과 피드포워
드 성분의 드룹 루프로 인해 더해진 오른쪽 성분이 합쳐져 출력 임피던
스가 나타난다. 전류 루프의 제어 대역폭 2.5kHz와 전압 루프의 제어 대
역폭 300Hz에 대해 출력 임피던스의 두 성분을 나타낸 보드 선도와 출
력 임피던스를 나타낸 결과를 그림 4.40과 그림 4.41에 나타낸다.
그림 4.40에서 전원단의 출력 임피던스를 구성하는 두 성분이 나타
나는데, 저 주파수 및 고 주파수에서와 달리 중간 주파수 대역에서 두
임피던스가 서로 겹치는 부분이 발생하게 된다. 따라서 두 성분의 합으
로 표현되는 전체 전원단의 출력 임피던스를 나타낸 그림 4.41에서 알
수 있듯이, 1차 시스템으로 이루어진 출력 임피던스와 비교하였을 때 중
간 주파수 대역에서 크기와 위상에 차이가 발생하게 된다. 이러한 차이
는 드룹 임피던스 Rd의 크기가 크거나 전압 루프의 보상기 Hv를 좀 더
키우는 경우에 줄어들게 된다. 하지만 Rd나 Hv는 시스템의 설계 사양과
전원단 컨버터 하드웨어로 인해 자유도가 제한되기 때문에 일반적으로
그림 4.41과 같이 출력 임피던스가 변하게 된다.

145
-100
-50
0
50
Mag
nitu
de (
dB)
Voltage loop term
Droop term
100 101 102 103 104 105-180
0
180
360
540
Pha
se (
deg)
Components of Output impedance Zo
Frequency (Hz)
그림 4.40 전압 루프로 인한 출력 임피던스와 드룹 루프로 인한 출력
임피던스
-60
-40
-20
0
20
VI droop
1st order system
100 101 102 103 104 105-180
-90
0
90
Output impedance, Zo
Frequency (Hz)
그림 4.41 V-I 드룹 제어가 적용된 전원단 출력 임피던스와 전압제어
루프의 대역폭을 가지는 1차 저역필터 시스템

146
(b)
(c)
(a)
(a)
그림 4.42 V-I 드룹 제어 및 전압제어 루프의 대역폭을 가지는 1차
저역필터 시스템에 대한 버스 임피던스
그림 4.42는 그림 4.41의 출력 임피던스를 바탕으로 버스 임피던스를
나타낸 그림이다. V-I 드룹 제어가 적용된 버스 임피던스는 중간 주파수
대역에서 차이를 나타나며, 차이가 발생하는 부분은 크게 3가지로
- (a): 대역폭 이전에서 상승하는 크기와 위상
- (b): 대역폭 부근에서 낮게 나타나는 위상
- (c): 대역폭 이후에서 크게 나타나는 위상
으로 구분할 수 있으며, 각각에 대하여 고려해야 할 내용에 대하여 기술
하면 아래와 같다.
먼저 대역폭 이전에서 상승하는 크기로 인해 부하의 대역폭 이전에
버스와 부하단 임피던스의 교점이 발생할 수 있다. 부하단의 위상은 음
의 저항으로 인해 -180o에 가까운 값을 지니며, 전원단의 위상은 0o에서

147
상승된 위상을 가지는 곳에서 시스템의 교점이 발생하게 된다. 이로 인
해 시스템의 교점에서 위상 차이가 -180o가 될 수 있으며, 1차 시스템을
가진 출력 임피던스에서는 안정한 시스템이 V-I 드룹 제어의 출력 임피
던스를 사용한 시스템에서 불안정해 질 수 있다. 이에 해당하는 보드 선
도와 나이퀴스트 선도를 그림 4.43과 그림 4.44에 나타내었다. 저 주파수
에서 버스 임피던스와 부하단 임피던스의 거리는 전력 용량에 대한 설계
여유에 의해 결정이 되므로, 전력 용량에 대한 설계 여유를 기반으로 VI
droop의 대역폭 이전 크기 상승을 고려해야 한다.
-20
-10
0
10
20
Mag
nitu
de (
dB)
100 101 102 103 104-180
-90
0
90
180
Pha
se (
deg)
VI droop
1st order systemZl(500uF, 1.25ohm)
Bode Diagram
Frequency (Hz)
)
그림 4.43 부하단 대역폭 이전에 교점이 생기는 경우

148
-1.8 -1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
VI droop
1st order system
Nyquist Diagram
Real Axis
Imag
inar
y A
xis
그림 4.44 임피던스 크기의 증가로 인해 불안정한 시스템을 나타내는
나이퀴스트 선도
-100
-50
0
50
100
Mag
nitu
de (
dB)
100 101 102 103 104 105 106-180
-90
0
90
180
Pha
se (
deg)
VI droop
1st order systemZl(500uF, 12.5ohm)
Bode Diagram
Frequency (Hz)
)
그림 4.45 시스템의 교점이 부하단 대역폭 이후에서 버스 임피던스의
상승하는 크기와 만나는 경우

149
마찬가지로 다르게 발생할 수 있는 상황으로 그림 4.45는 부하단 임
피던스와 버스 임피던스의 교점이 부하단 대역폭 이후에서 버스 임피던
스의 상승하는 크기와 만나는 경우를 나타낸다. 부하의 위상은 대역폭
이후 지점이므로 -180o에서 45o 이상이 상승한 상태이며, 버스의 위상은
상승하는 위상의 크기에 의해 결정된다. 부하단의 위상이 최소 45o가 상
승된 상태이기 때문에 버스 임피던스의 대역폭 이전 위상이 45o를 넘지
않는다면 불안정한 결과가 발생하지 않는다. 즉, 그림 4.42의 (a)에서
100Hz 대역 부근 위상의 최댓값이 45o를 넘지 않도록 설계가 필요하다.
그림 4.42의 (b)는 버스 대역폭 부근에서 V-I 드룹 제어가 적용된 버
스 임피던스의 위상이 감소하는 경우로 부하단과의 위상 차이가 줄어들
기 때문에 동일한 조건에서 시스템이 안정해지는 결과를 나타낸다. 따라
서 해당 영역에서의 V-I 드룹 제어는 대역폭 설계에 충분 조건으로 작용
한다.
마지막으로 그림 4.42의 (c)는 버스 대역폭 이후에서 V-I 드룹 제어
가 적용된 버스 임피던스의 위상이 더 빠르게 90o로 수렴하는 영역을 나
타낸다. 그림 4.46과 그림 4.47은 보드 선도 및 나이퀴스트 선도 결과를
나타내며, V-I 드룹 제어로 인해 안정해야 하는 시스템 설계에서 불안정
한 결과가 발생하는 것을 확인할 수 있다. 이를 방지하기 위해서는
- 시스템의 교점인 fLC를 위상이 더 빨리 상승하는 영역 이전으로
제한
- 대역폭 설계 조건에 위상 상승 정도를 감안하여 충분 조건을 추
가
와 같은 방법이 고려되어야 한다.

150
-50
0
50
100
Mag
nitu
de (
dB)
VI droop
1st order systemZl(22uF, 312ohm)
100 101 102 103 104 105 106-180
-90
0
90
180
Pha
se (
deg)
Bode Diagram
Frequency (Hz)
)
그림 4.46 시스템의 교점이 V-I 드룹 제어로 인해 위상이 더 빠르게
상승하는 영역에서 발생하는 경우
-9 -8 -7 -6 -5 -4 -3 -2 -1
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25 VI droop1st order system
Nyquist Diagram
Real Axis
Imag
inar
y A
xis
그림 4.47 시스템의 교점이 V-I 드룹 제어로 인해 위상이 더 빠르게
상승하는 영역에서 발생하는 경우에 대한 나이퀴스트 선도 결과

151
4.5.2.2 출력 전류 피드포워드 제어
그림 4.40에서 확인한 것처럼 전압루프로 인한 출력 임피던스의 크
기가 드룹 제어로 인한 출력 임피던스와 비슷한 값을 지니는 경우 두 임
피던스의 합에 영향을 주었다. 따라서 전압루프의 대역폭이 크게 설계되
는 경우에는 앞서 살펴본 문제들이 완화되는 반면, 전압루프의 대역폭이
낮을수록 V-I 드룹 제어로 인한 버스 임피던스의 변화가 커지게 된다.
그림 4.48과 그림 4.49는 전류 제어 대역폭은 유지한 채 전압 루프의 대
역폭을 20Hz로 낮춰서 설계한 경우에 대해 출력 임피던스와 버스 임피
던스를 나타내며, 버스 임피던스가 변하는 정도가 그림 4.42와 비교했을
때 커진 것을 알 수 있다.
-60
-40
-20
0
20
40
VI droop
1st order system
10-1 100 101 102 103 104-135
-90
-45
0
45
90
Output impedance, Zo
Frequency (Hz)
그림 4.48 전압루프 대역폭으로 20Hz를 설계한 V-I 드룹 제어의 출력
임피던스
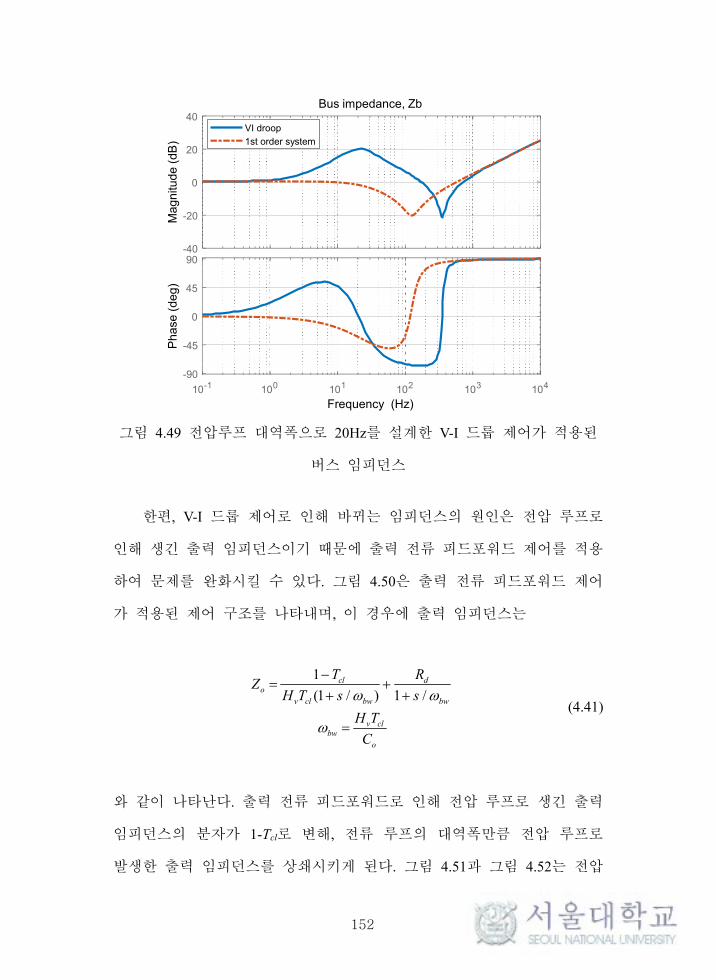
152
-40
-20
0
20
40
Mag
nitu
de (
dB)
VI droop
1st order system
10-1 100 101 102 103 104-90
-45
0
45
90
Pha
se (
deg)
Bus impedance, Zb
Frequency (Hz)
그림 4.49 전압루프 대역폭으로 20Hz를 설계한 V-I 드룹 제어가 적용된
버스 임피던스
한편, V-I 드룹 제어로 인해 바뀌는 임피던스의 원인은 전압 루프로
인해 생긴 출력 임피던스이기 때문에 출력 전류 피드포워드 제어를 적용
하여 문제를 완화시킬 수 있다. 그림 4.50은 출력 전류 피드포워드 제어
가 적용된 제어 구조를 나타내며, 이 경우에 출력 임피던스는
1
(1 / ) 1 /cl d
ov cl bw bw
v clbw
o
T RZ
H T s s
H T
C
(4.41)
와 같이 나타난다. 출력 전류 피드포워드로 인해 전압 루프로 생긴 출력
임피던스의 분자가 1-Tcl로 변해, 전류 루프의 대역폭만큼 전압 루프로
발생한 출력 임피던스를 상쇄시키게 된다. 그림 4.51과 그림 4.52는 전압
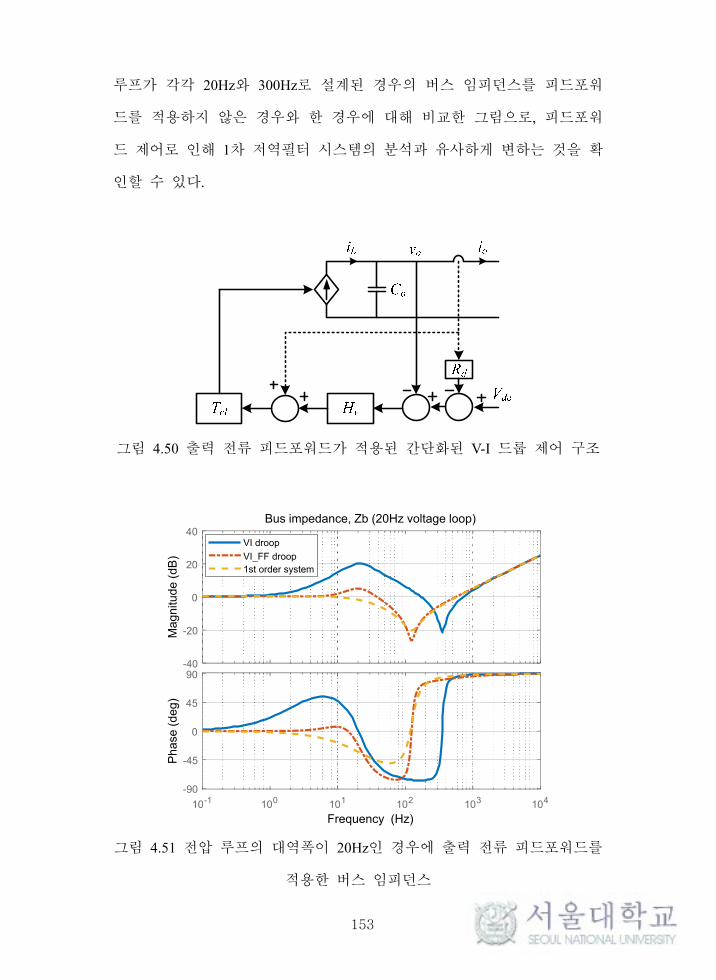
153
루프가 각각 20Hz와 300Hz로 설계된 경우의 버스 임피던스를 피드포워
드를 적용하지 않은 경우와 한 경우에 대해 비교한 그림으로, 피드포워
드 제어로 인해 1차 저역필터 시스템의 분석과 유사하게 변하는 것을 확
인할 수 있다.
그림 4.50 출력 전류 피드포워드가 적용된 간단화된 V-I 드룹 제어 구조
-40
-20
0
20
40
Mag
nitu
de (
dB)
VI droop
VI_FF droop1st order system
10-1 100 101 102 103 104-90
-45
0
45
90
Pha
se (
deg)
Bus impedance, Zb (20Hz voltage loop)
Frequency (Hz)
그림 4.51 전압 루프의 대역폭이 20Hz인 경우에 출력 전류 피드포워드를
적용한 버스 임피던스
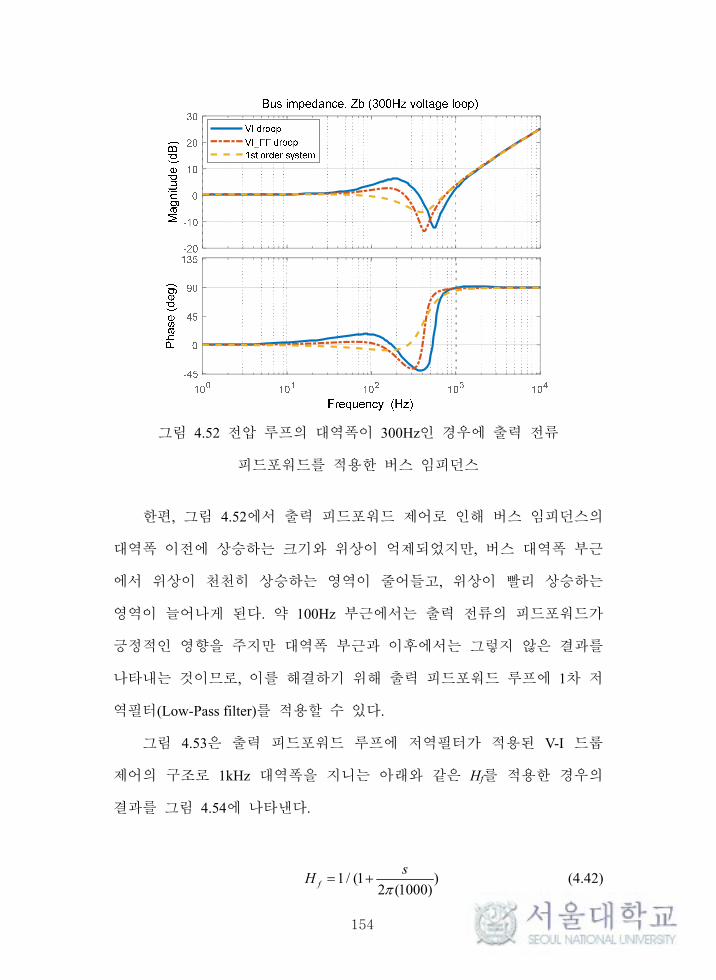
154
그림 4.52 전압 루프의 대역폭이 300Hz인 경우에 출력 전류
피드포워드를 적용한 버스 임피던스
한편, 그림 4.52에서 출력 피드포워드 제어로 인해 버스 임피던스의
대역폭 이전에 상승하는 크기와 위상이 억제되었지만, 버스 대역폭 부근
에서 위상이 천천히 상승하는 영역이 줄어들고, 위상이 빨리 상승하는
영역이 늘어나게 된다. 약 100Hz 부근에서는 출력 전류의 피드포워드가
긍정적인 영향을 주지만 대역폭 부근과 이후에서는 그렇지 않은 결과를
나타내는 것이므로, 이를 해결하기 위해 출력 피드포워드 루프에 1차 저
역필터(Low-Pass filter)를 적용할 수 있다.
그림 4.53은 출력 피드포워드 루프에 저역필터가 적용된 V-I 드룹
제어의 구조로 1kHz 대역폭을 지니는 아래와 같은 Hf를 적용한 경우의
결과를 그림 4.54에 나타낸다.
1 / (1 )2 (1000)f
sH
(4.42)

155
그림 4.53 출력 피드포워드 루프에 저역필터가 적용된 V-I 드룹 제어
-20
-10
0
10
20
30
Mag
nitu
de (
dB)
100 101 102 103 104-45
0
45
90
135
Pha
se (
deg)
VI_FF droop
Filter added VI_FF droopZb_ideal
Bus impeance, Zb
Frequency (Hz)
그림 4.54 전압 루프의 대역폭이 300Hz인 경우에 1kHz 저역필터를 출력
전류 피드포워드 루프에 적용한 버스 임피던스

156
-10
-5
0
5
10
15
Mag
nitu
de (
dB)
102 103-45
0
45
90
135
Pha
se (
deg)
0.5kHz filter1kHz filter2kHz filter1st order system
Enlarged bus impedacne, Zb
Frequency (Hz)
그림 4.55 저역필터의 대역폭에 따른 버스 임피던스의 변화
그림 4.54에서 대역폭 이전에서 상승하는 크기와 위상을 억제하는
효과는 유지되었으며, 대역폭 부근과 이후에서의 위상 특성이 피드포워
드 제어가 적용되지 않은 V-I 드룹 제어의 특성이 반영되었다. 그림 4.55
는 저역필터의 대역폭을 조절하며 버스 임피던스를 나타낸 것으로 임피
던스의 상황에 따라 적절한 필터 값을 사용할 수 있음을 알 수 있다.
그림 4.54의 결과 전압루프의 대역폭을 가지는 1차 저역필터를 출력
임피던스로 지니는 버스 임피던스와 비교했을 때, 전반적인 특성이 유사
하며 대역폭 부근에서의 위상 특성은 더 좋은 것을 확인할 수 있다. 즉,
해당 결과를 통해 V-I 드룹 제어기를 적용하는 경우에도 기존 대역폭 분
석을 적용할 수 있으며 개선된 위상 특성은 충분 조건으로 작용한다.

157
4.5.3 캐패시터의 ESR
2장에서 4장까지의 분석 및 설계에서는 캐패시터에 저항 성분
(Equivalent Series Resistor, ESR)이 없는 모델을 사용하여 진행하였다. 실제
로 캐패시터의 종류에 따라 필름(Film)이나 세라믹(Ceramic) 캐패시터의
경우는 무시할 수 있을 만큼의 작은 ESR이 있다고 가정할 수 있기 때문
에 일반적으로 ESR에 대한 고려를 하지 않아도 된다. 하지만 전해
(Electrolytic) 캐패시터는 앞의 두 캐패시터에 비해 큰 ESR 값을 일반적
으로 가지기 때문에 캐패시터의 ESR이 대역폭에 주는 영향에 대한 분석
이 요구된다. 전원단의 출력 캐패시터와 부하단의 입력 캐패시터의 ESR
이 각각 어떤 대역폭 분석에 어떤 영향을 주는지를 분석한다.
그림 4.56 전원단 출력 캐패시터에 ESR이 추가된 회로
CL
-RLZl
rc
그림 4.57 부하단 입력 캐패시터에 ESR이 추가된 회로

158
4.5.3.1 전원단 캐패시터의 ESR
그림 4.56은 전원단 컨버터의 출력 캐패시터에 ESR이 들어가 있는
회로를 나타낸다. 해당 회로에서 출력 캐패시터의 ESR가 들어가면
o cL o o L o o
dv dvi i C i i C
dt dt (4.43)
와 같은 형태로 상태 방정식이 변하게 된다. 출력 전압 vo와 캐패시터
전압 vc와의 관계는
cc o c o
dvr C v v
dt (4.44)
가 되므로, 식 (4.43)과 식 (4.44)를 조합하게 되면 캐패시턴스에 대한 다
음과 같은 식을 얻을 수 있다.
1o
oo c
CC
sC r
(4.45)
그림 4.58은 삼영 社의 450V/220uF 전해 캐패시터를 EDC-1630 LCR
meter를 사용하여 측정한 결과를 나타낸다. 주파수가 상승함에 따라 캐
패시턴스와 ESR이 약 190uF/0.4Ω으로 수렴하게 된다. 표 4.4의 전원단
출력 캐패시터가 800uF이므로 동일한 4개의 캐패시터를 병렬한 것으로
생각하면 등가 ERS은 0.1Ω이 되며, ESR로 인해 발생하는 영점의 위치는
약 2kHz가 된다. ESR의 영향을 포함하여 V-I 드룹 제어가 적용된 버스
임피던스를 그린 결과를 그림 4.59에 나타난다.

159
0 0.5 1 1.5 2 2.5186
188
190
192
194
196
198
200
202
204
206
0.38
0.4
0.42
0.44
0.46
0.48
0.5
0.52450V 220uF electrolytic capacitor
Cap
acit
ance
(uF
)
ES
R(
)
그림 4.58 전해 캐패시터의 캐패시턴스 및 ESR 측정 결과
-10
0
10
20
30
Ma
gn
itud
e (
dB
)
VI droop
VI_FF droop1st order system
100 101 102 103 104-45
0
45
90
Ph
ase
(d
eg
)
Bus impedance, Zb with ESR effect
Frequency (Hz)
그림 4.59 전원단 캐패시터에 ESR이 포함된 경우의 버스 임피던스
160
버스의 대역폭 부근에서 형성되는 ESR의 영점으로 인해 V-I 드룹
제어가 적용된 버스 임피던스의 대역폭 이후 위상이 개선된 것을 확인할
수 있다. 특히, 대역폭 이후에서 나타났던 그림 4.42의 (c)영역(=위상이
더 빨리 상승했던 영역)이 ESR의 영점으로 인해 사라진 것을 확인할 수
있다. 정리하면 ESR이 시스템 특징을 향상시키는 방향으로 동작하기 때
문에 기존에 분석한 대역폭 관계식에 충분 조건으로의 요소를 더해주게
된다. ESR이 대역폭에 주는 영향을 수식으로 표현하게 되면 아래와 같이
정리된다.
_
2
_
1,
2 2
1(1 )
1 ( )
cz esr ESR
c s
load sta bus sta cable ESRLC
z esr
rf f
r C L
f k f k f ff
f
(4.45)
4.5.3.2 부하단 캐패시터의 ESR
그림 4.57은 부하단 캐패시터의 입력 캐패시터에 ESR이 들어가 있
는 회로를 나타낸다. 해당 회로에서 입력 캐패시터에 ESR이 들어간 경
우의 입력 임피던스를 구해보면 다음과 같다.
(1 )
1 ( )L c L
lL L c
R sr CZ
sC R r
(4.46)
ESR로 인한 영점이 추가되었고, 부하단 대역폭을 형성하는 부하 크
기 RL에 ESR rc가 영향을 주는 형태로 대역폭이 바뀌게 된다. 부하의 크
기와 ESR을 비교하기 위해 380V/10kW에 해당하는 부하 크기를 구해보
면 다음과 같다.

161
2
3
38014.4
10 10LR
(4.47)
용량이 클수록 저항은 작아지고, 용량이 작을수록 저항은 커지게 된
다. 그림 4.58에서 나타나는 ESR은 (4.47)의 RL에 비해 무시할 만큼 작은
값이기 때문에 부하단 대역폭에 영향을 주지 않는다. 일반적으로 용량이
커질수록 캐패시터의 병렬 구성을 통해 ESR을 감소시키기 때문에 ESR
값은 부하단 대역폭의 위치에는 영향을 주지 않는다. 반면, 예를 든 전해
캐패시터의 영점의 위치는 2kHz에 형성되어 위상의 상승이 발생하게 된
다. 즉, 부하단 입력 임피던스의 위상이 -180o를 기점으로 더 빠르게 올
라가게 되므로 시스템의 교점에서 위상 여유가 증가하게 된다. 따라서
부하단 캐패시터의 ESR 역시 시스템 안정화에 도움을 주므로, 기존에
분석한 대역폭 관계식에 충분 조건으로의 영향을 더해준다.
4.5.4 버스 대역폭 측정 방법 및 버스 설계 고려사항
버스에 대해 정의된 대역폭은 버스 대역폭 fbus 및 전원단 제어 대역
폭 fbw가 있다. 3장에서 전원단의 출력 임피던스가 1차 출력 시스템으로
구성된 버스 대역폭 및 전원단의 제어 대역폭을 기준으로 실제 드룹 제
어기의 출력 임피던스가 사용되는 경우 동일한 fbus 및 fbw가 정의되더라
도 버스 임피던스의 형태에 따라 대역폭 해석에 대해 충분 조건으로 작
용할 수도 있었으며, 불안정한 요소가 나타나게 되는 경우가 있음을
4.5.2절의 V-I 드룹 제어의 사례를 통해 확인하였다. 따라서 본 절에서는
대역폭 설계 기준을 보장하기 위하여, 유효한 버스의 대역폭 특징을 측
정하는 방법에 대하여 설명한다.
먼저 버스의 출력 임피던스 측정이 요구된다. 출력 임피던스의 측정

162
방법은 그림 4.60과 같이 출력 전류로 사인 파형의 전류를 인가하였을
때, 나타나는 출력 전압의 위상을 통해 구할 수 있다. HP 4194와 같은
network analyzer를 통해 자동적으로 구하거나, 여러 주파수에 해당하는
전류를 인가하여 전류 및 전압의 위상을 비교하여 구할 수 있다. 그림
4.60은 버스 임피던스를 측정하는 방법을 나타내며, 그림 4.61은 그림
4.60의 방법을 이용해 PSIM 시뮬레이터의 AC sweep을 사용하여 측정된
버스 임피던스를 나타낸다.
그림 4.60 버스 임피던스를 측정하는 방법
그림 4.61 PSIM의 AC sweep으로 측정한 버스의 임피던스

163
먼저 fbus에 대하여 측정하기 위해서는, fbus는 R/L로 표현되므로 저항
과 인덕턴스에 대한 정보가 필요하다. 저항은 위상이 0도 부근을 나타내
는 저 주파수의 크기에 해당하며, 0.44dB이므로 저항은 1.05Ω으로 측정
된다. 인덕턴스는 위상이 90도를 나타내는 높은 주파수의 크기에 해당하
며, 약 6kHz에서 20.7dB이므로 인덕턴스는 287uH로 측정된다. 따라서 임
피던스를 통해 추출된 버스의 대역폭 fbus는 582Hz가 된다.
fbw는 fbus와 같은 방법으로는 측정이 어려우며, 측정된 R과 L을 이용
하여 간접적으로 구해야 한다. 버스의 출력 임피던스가
~1 / 2b
bw
RZ sL
s f
(4.48)
와 같은 형태로 표현되는 것을 이용하여 추출된 R값과 L값을 기반으로
fbw를 대입하여 비교하는 것으로 구할 수 있다. 그림 4.62는 측정된 버스
임피던스에 대해 fbw를 바꾸어가며 비교한 보드 선도를 나타낸 것으로
약 300Hz로 fbw가 정해지는 것을 알 수 있다.
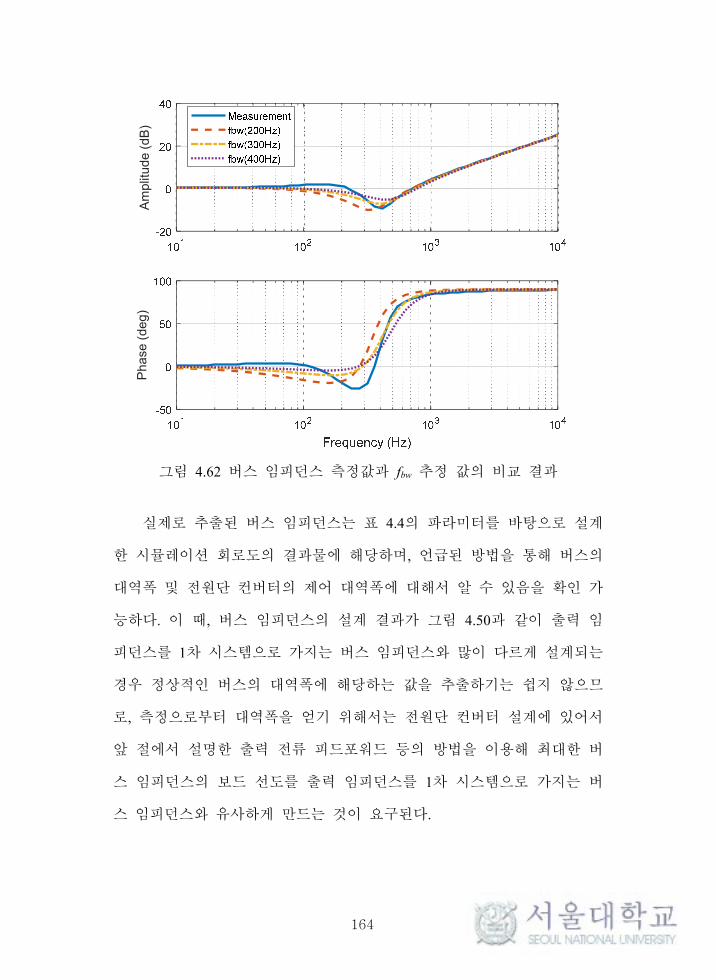
164
Am
plitu
de (
dB)
Ph
ase
(d
eg
)
그림 4.62 버스 임피던스 측정값과 fbw 추정 값의 비교 결과
실제로 추출된 버스 임피던스는 표 4.4의 파라미터를 바탕으로 설계
한 시뮬레이션 회로도의 결과물에 해당하며, 언급된 방법을 통해 버스의
대역폭 및 전원단 컨버터의 제어 대역폭에 대해서 알 수 있음을 확인 가
능하다. 이 때, 버스 임피던스의 설계 결과가 그림 4.50과 같이 출력 임
피던스를 1차 시스템으로 가지는 버스 임피던스와 많이 다르게 설계되는
경우 정상적인 버스의 대역폭에 해당하는 값을 추출하기는 쉽지 않으므
로, 측정으로부터 대역폭을 얻기 위해서는 전원단 컨버터 설계에 있어서
앞 절에서 설명한 출력 전류 피드포워드 등의 방법을 이용해 최대한 버
스 임피던스의 보드 선도를 출력 임피던스를 1차 시스템으로 가지는 버
스 임피던스와 유사하게 만드는 것이 요구된다.

165
제 5 장 실험 및 결과
5.1 시스템 구성
정전력 부하로 인해 시스템의 댐핑이 줄어들는 전압 안정도의 불안
정은 직류 전압의 크기에 따라 발생하는 파워가 달라진다. 동일한 부하
대역폭 fload와 부하 캐패시터 CL이 주어지는 경우에 특정 동작영역에서
소신호 모델로 표현되는 부하 저항 RL은 전압 크기와 상관없이 동일하다.
하지만 부하 용량은 전압의 제곱에 비례하기 때문에 전압 크기가 커질수
록 증가하게 되며, 전원단의 제어 대역폭 또한 일반적으로 높은 전압과
높은 용량의 전력변환장치에서는 높은 값으로 설계하기가 힘들어진다.
예를 들어, 380V 레벨의 dc-dc 컨버터의 전압제어 대역폭 fbw를 300Hz,
300m(=150m 케이블의 왕복 길이)에 해당하는 케이블 인덕턴스 100uH,
주어진 버스 대역폭 fbus를 140Hz라고 할 때, ksta가 0.5라면 최소 캐패시턴
스 Csta는 2.8mF이며 Csta에서 시스템의 댐핑이 유지되는 최대 용량은 약
180kW가 된다. ksta가 0.2라면 최소 캐패시턴스 Csta는 700uF이며 Csta에서
시스템의 댐핑이 유지되는 최대 용량은 약 18kW가 된다.
시스템의 댐핑 부족에 따른 불안정 문제는 전압 레벨 및 용량과 무
관하게 정전력 부하의 특성으로 인해 발생할 수 있지만, 전압 레벨이 높
은 경우에 관찰하기 위한 시스템 용량이 매우 커지기 때문에, 대부분의
논문들에서는 축소 실험을 통하여 불안정 현상을 관찰하였다. 본 논문
역시 실험의 편의를 위해 축소 실험을 통하여 대역폭 해석에 대한 결과
를 검증하였다. 본 논문에서는 48V/200W로 축소된 실험 세트와
250V/2.5kW로 축소된 실험 세트를 구성하였으며, 실험 결과를 아래에 기
술한다.
166
5.2 48 V 시스템 설계 및 실험 결과
5.2.1 48 V 시스템 설계
그림 5.1과 그림 5.2는 실험 세트와 회로도를 나타내며, 실험 세트
는 벅 컨버터로 이루어진 전원단 컨버터와 디지털 제어를 위한 제어
보드, 케이블 임피던스를 구현하기 위한 L 필터 및 벅 컨버터로 구성
된 부하단 컨버터로 구성된다. 본 실험에서는 편의를 위해 전원단 컨
버터의 발전원으로 DC 파워 서플라이를 사용하였으며, 전원단 컨버터
의 제어는 TI社의 TMS320F28335를 통해 구현하였으며, 제어 블록은
그림 5.4에 나타난다. 전원단 컨버터 1에는 V-I 드룹 제어가 적용된 이
중 루프 전압 제어를 적용하였으며, 스위칭 주파수는 50kHz이며, 샘플
링 주파수는 100kHz가 사용되었다. 전원단 컨버터 2에는 I-V 드룹 제
어가 적용되었으며, 스위칭 주파수는 200kHz이며 샘플링 주파수는
200kHz가 사용되었다. 케이블 임피던스는 필터 인덕터를 통해 구현되
었으며, 5.1절에서 설명한 것처럼 전압 불안정 현상을 관찰하기 위한
축소 실험의 구성을 위해 필터 인덕터 1에는 220uH의 큰 값이 사용되
었으며, 필터 인덕터 2는 50uH가 사용되었다. 부하단 컨버터의 경우
이상적인 정전력 부하를 모의하기 위해 TI社의 UC3823ADW를 사용하
여 빠른 응답 특성을 가지는 300kHz 구동 벅 컨버터를 구현하였다.
Type-3 보상기에 기반한 전압 제어를 적용하였으며 사용된 보상기 회
로는 그림 5.4에 나타난다. 그림 5.5는 제어기 설계를 통해 벅 컨버터
의 입력 임피던스를 나타내며, 약 10kHz까지 이상적인 정전력 부하의
특성을 나타내는 것을 확인할 수 있다. 표 5.1은 실험 시스템의 파라미
터를 정리하여 나타낸다.
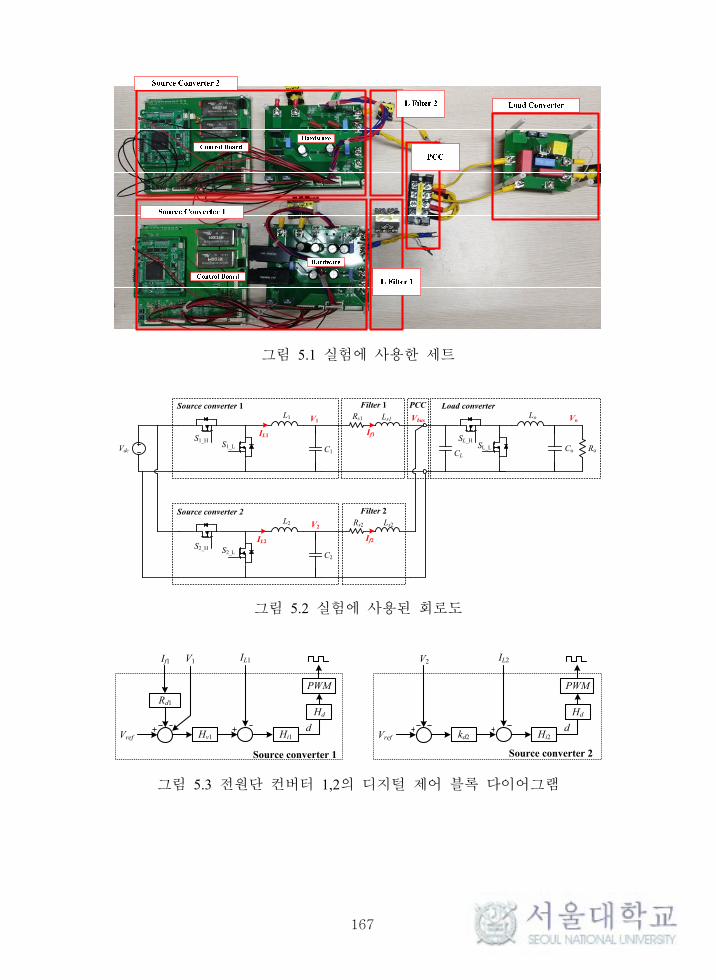
167
그림 5.1 실험에 사용한 세트
Rs1 Ls1L1
C1
Lo
CoCLRo
Source converter 1 Load converter
Vdc
Rs2 Ls2L2
C2
Source converter 2
If1
If2
Vbus
S1_HS1_L
S2_H S2_L
SL_HSL_L
Filter 1
Filter 2
PCC
IL1
V1
IL2
V2
Vo
그림 5.2 실험에 사용된 회로도
Rd1
Vref
If1
Hv1 Hi1
IL1
d
Hd
V1
PWM
Source converter 1
Vref kd2 Hi2
IL2
d
Hd
V2
PWM
Source converter 2
그림 5.3 전원단 컨버터 1,2의 디지털 제어 블록 다이어그램

168
그림 5.4 Type-3 보상기의 파라미터
0
20
40
60
80
Mag
nitu
de (
dB)
101 102 103 104 105 106 107-180
-90
0
90
Pha
se (
deg)
Input Impedance of Load Buck Converter
Frequency (Hz)
그림 5.5 설계된 부하단 벅 컨버터의 입력 임피던스
표 5.1 실험 시스템의 스펙 및 파라미터
Source converter
1,2
Vdc 100 V L1, L2 200 uH, 50 uH C1, C2 272uF(68 uF*4), 10uF
fsw1, fsw2 / fsamp1, fsamp2 50kHz, 200kHz / 100kHz, 200kHz Rd1, Rd2 0.64Ω, 3.84Ω
Hv1 1.5915+1000/s

169
Hi1, Hi2 0.06366+200/s, 0.09947+250/s Switch(S1_H,S1_L,S2_H,S2_L) RJFS3006S
Filter 1 Rs1, Ls1 80mΩ, 220uH
Filter 2 Rs2, Ls2 40mΩ, 50uH
Bus 1 fbus, fbw 520Hz, 1kHz
Bus 2 fbus, fbw 12kHz, 4.14kHz
Load converter Vo 24V Lo 25 uH Co 10 uF
SL_H, SL_L IPP200N15N3, STP30150CFP
버스 전압의 변동을 48-52V라고 가정하여, 200W 전원단 컨버터의 드
룹 제어로 인한 전압 변동이 버스 전압 변동의 5% 부근으로 만들도록
드룹 저항을 0.64Ω으로 설계하였다. 전원단 컨버터 1과 필터 1로 구성된
버스의 대역폭 특징은
520
463
57
1
bus
source
cable
bw
f Hz
f Hz
f Hz
f kHz
(5.1)
로 정리된다. 추가적으로 ksta 및 fLC를
2
0.2LC
sta
f kHz
k
(5.2)
로 설계하여, 부하단 대역폭 fload의 조건을 나타내면 다음과 같다.
104load sta busf k f Hz (5.3)
한편, 식 (5.3)의 부하단 대역폭의 결과는 3장의 식 (3.17)의 근사 결
170
과로 실제 fload의 대역폭은 아래와 같은 값을 지닌다.
(1 ) 150load sta bus sta cablef k f k f Hz (5.4)
(1-ksta)fcable의 값에 따라 근사 정도가 결정되는데, 현재 실험 파라미터인
식 (5.1)과 식 (5.2)에서 ksta가 작고 fcable이 fsource와 비교할 때 아주 작은
값이 아니기 때문에 충분 조건에 해당하는 여유도가 크다는 것을 식
(5.3)과 식 (5.4)를 통해 확인할 수 있다. 본 실험에서는 대역폭 기반 해
석의 결과를 보다 정확하게 살펴보기 위해 식 (5.4)를 사용하였다. 따라
서 식 (5.4)의 해석에 대한 검증을 통해 앞 장에서 분석한 내용과 설계의
유효성을 증명한다. 이상으로 정리된 부하단의 대역폭 및 fLC를 만족하는
최소 캐패시턴스 설계 정보는 다음과 같다.
150
30load
sta
f Hz
C F
(5.5)
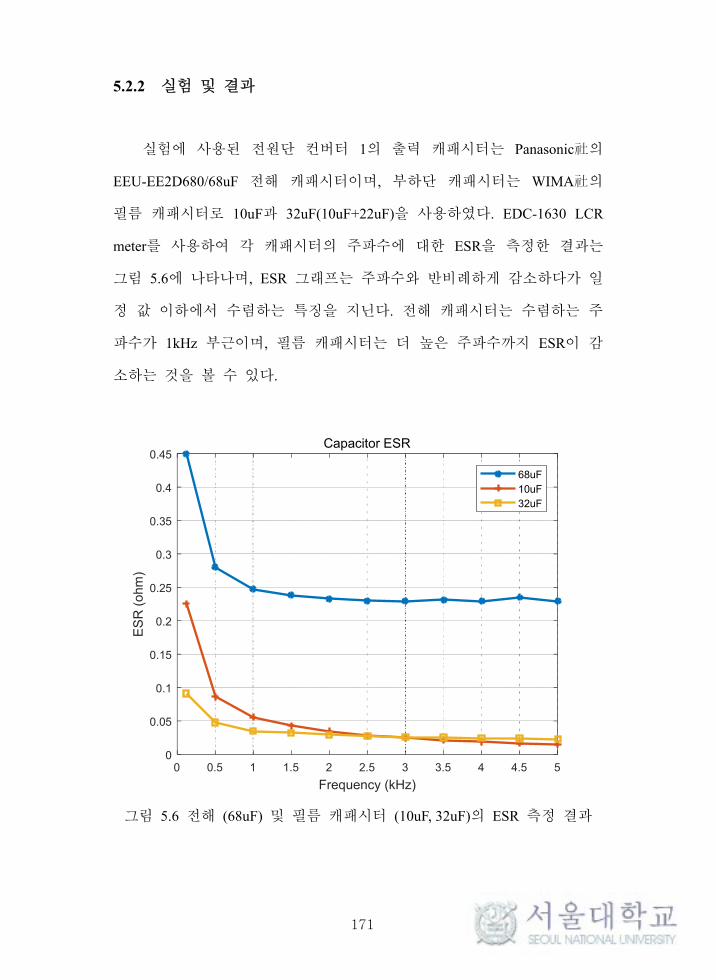
171
5.2.2 실험 및 결과
실험에 사용된 전원단 컨버터 1의 출력 캐패시터는 Panasonic社의
EEU-EE2D680/68uF 전해 캐패시터이며, 부하단 캐패시터는 WIMA社의
필름 캐패시터로 10uF과 32uF(10uF+22uF)을 사용하였다. EDC-1630 LCR
meter를 사용하여 각 캐패시터의 주파수에 대한 ESR을 측정한 결과는
그림 5.6에 나타나며, ESR 그래프는 주파수와 반비례하게 감소하다가 일
정 값 이하에서 수렴하는 특징을 지닌다. 전해 캐패시터는 수렴하는 주
파수가 1kHz 부근이며, 필름 캐패시터는 더 높은 주파수까지 ESR이 감
소하는 것을 볼 수 있다.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Frequency (kHz)
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
ES
R (
ohm
)
Capacitor ESR
68uF10uF32uF
그림 5.6 전해 (68uF) 및 필름 캐패시터 (10uF, 32uF)의 ESR 측정 결과

172
-20
0
20
40
60
Mag
nitu
de (
dB)
Exp_Bus impedance
Ref_Bus impedance
100 101 102 103 104 1050
45
90
Pha
se (
deg)
Bode Diagram
Frequency (Hz)
그림 5.7 ESR이 고려된 버스 임피던스와 1차 출력 저역필터를 출력
임피던스로 가지는 버스 임피던스(=기준 버스 임피던스)의 비교
측정된 ESR를 기반으로 전원단 컨버터 1과 필터 1로 이루어진 버스
의 임피던스를 그린 결과는 그림 5.7에 나타난다. 실선은 구성한 버스의
임피던스이며, 붉은색 점선은 전원단 컨버터의 출력 임피던스가 1차 저
역필터이면서 설계한 버스의 대역폭 fbus 및 전원단 제어 대역폭 fbw를 가
질 때의 버스 임피던스를 나타낸다. 즉, 붉은색 점선은 대역폭 설계의 기
준이 되는 값이 되는데, 현재 설계한 버스 임피던스의 위상 특성이 4장
의 4.5절에서 살펴본 것처럼 V-I 드룹제어의 특징과 ESR의 영향으로 인
해 기준이 되는 경우보다 좋은 특성을 가지게 된다. 그 결과 대역폭 조
건에 대해 충분 조건으로 동작하기 때문에, 대역폭 조건으로 계산된 용
량보다 더 높은 용량까지 안정하게 동작하게 된다.

173
0.02 0.04 0.06 0.08 0.1 0.12 0.14
time [s]
48.5
49
49.5
50
50.5
51
51.5
52bus voltage
그림 5.8 42uF 부하 캐패시터를 가지는 부하단이 연결된 시스템에서
전원단의 제어 대역폭이 1kHz로 설계된 경우의 시뮬레이션(왼쪽) 및
실험 결과(오른쪽)
그림 5.8은 42uF의 부하 캐패시터 CL을 가지는 부하단 컨버터를 버
스에 연결한 경우에 대한 시뮬레이션 및 실험 결과를 나타낸다. 식 (5.5)
에 따라 42uF의 CL에 해당하는 부하 용량은 약 100W이며, 시뮬레이션
결과 약 140W까지 안정적으로 동작하는 것을 확인할 수 있다. 실험 결
과 역시 140W까지 안정적으로 동작하였다.
시스템의 교점 fLC는 필터 인덕턴스 220uH과 부하 캐패시턴스 42uF
이 만나는 1.73kHz에서 형성이 되며, 그림 5.7에서 알 수 있듯이 해당 주
파수에서 V-I 드룹 제어가 적용된 버스 임피던스가 향상된 위상 특성을
보이게 된다. 따라서 향상된 위상 특성이 대역폭 설계에 충분 조건으로
동작하게 되어, 계산된 값에 비해 더 높은 용량까지 시스템이 안정적으
로 동작하게 된다.

174
그림 5.9 42uF 부하 캐패시터를 가지는 부하단이 연결된 시스템에서
전원단의 제어 대역폭이 200Hz로 감소한 경우의 시뮬레이션(왼쪽) 및
실험 결과(오른쪽)
If
(2A/div)
Vbus
(20V/div)
그림 5.10 140W에서의 실험 확대 파형
그림 5.9는 동일한 상황에서 전원단의 제어 대역폭을 200Hz로 줄인
경우에 대한 시뮬레이션 및 실험 결과를 나타낸다. 전원단의 제어 대역
폭이 감소하게 되면, ksta가 작아지기 때문에 시스템이 더 낮은 용량에서

175
불안정하게 바뀌게 된다. 그림 5.9에서 시뮬레이션 결과 110W까지는 안
정한 파형을 유지하지만 140W로 바뀔 때 시스템이 불안정해지는 것을
확인할 수 있으며, 실험 파형 역시 시뮬레이션과 동일한 결과를 얻었다.
그림 5.10은 시스템이 불안정한 상태에 있는 파형을 확대한 결과로 약
1.76kHz로 공진하며, 이 값은 필터 인덕턴스와 부하단 캐패시턴스의 공
진 주파수와 일치하는 값을 가진다.
그림 5.11은 대역폭이 감소한 경우의 버스 임피던스를 나타낸 보드
선도로 그림 5.7에 비해 상승한 위상으로 인해 시스템이 140W에서 불안
불안정 변한 것을 알 수 있다.
-20
0
20
40
60
Mag
nitu
de (
dB)
200Hz fbw Bus impedance1kHz fbw Ref. Bus impedance
100 101 102 103 104 105-90
-45
0
45
90
Pha
se (
deg)
Bode Diagram
Frequency (Hz)
그림 5.11 200Hz 전원단 제어 대역폭을 가지는 버스 임피던스와 1kHz
전원단 제어 대역폭을 가지는 기준 버스 임피던스

176
0.02 0.04 0.06 0.08 0.1 0.12 0.14
time [s]
50.6
50.8
51
51.2
51.4
51.6
51.8
52
52.2
52.4
52.6
volta
ge V
]
bus voltage
그림 5.12 10uF 부하 캐패시터를 가지는 부하단이 연결된 시스템에서
전원단의 제어 대역폭이 1kHz로 감소한 경우의 시뮬레이션(왼쪽) 및
실험 결과(오른쪽)
그림 5.12는 10uF을 부하단 캐패시턴스로 가지는 부하가 버스에 연
결되어 있는 경우에 대한 시뮬레이션 및 실험 결과를 나타낸다. 식 (5.5)
에 따라 10uF의 CL에 해당하는 부하 용량은 약 25W이지만, 10uF은 Csta
인 30uF보다 더 작기 때문에 25W까지 정상적으로 동작하지 못하는 것이
대역폭 조건의 결과이다. 하지만 시뮬레이션 및 실험 결과로 25W까지
시스템이 안정하게 동작하는 것으로 나타났으며, 이 결과는 그림 5.7의
향상된 버스 임피던스의 위상 특성으로 설명이 가능하다.
시스템의 교점 fLC는 필터 인덕턴스 220uF과 부하 캐패시턴스 10uF
이 만나는 3.57kHz에서 형성이 되며, 그림 5.7에서 알 수 있듯이 3.57kHz
부근에서도 향상된 위상 특성을 보이게 된다. 또한 그림 5.2의 부하 컨버
터의 입력 임피던스의 위상 역시 3.57kHz에서 -180o와 떨어진 값을 가지
게 되므로 이러한 요인들이 충분 조건으로 대역폭 설계에 작용함에 따라
시스템이 안정적으로 동작할 수 있게 된다.

177
0.02 0.04 0.06 0.08 0.1 0.12 0.14
time [s]
40
45
50
55
60
65
volta
ge V
]
bus voltage
그림 5.13 10uF 부하 캐패시터를 가지는 부하단이 연결된 시스템에서
전원단의 제어 대역폭이 200Hz로 감소한 경우의 시뮬레이션(왼쪽) 및
실험 결과(오른쪽)
그림 5.13은 동일한 상황에서 전원단의 제어 대역폭을 200Hz로 줄인
경우에 대한 시뮬레이션 및 실험 결과를 나타낸다. 시뮬레이션 결과와
실험 결과가 일치하며, 이 경우에 시스템은 25W에서 불안정한 결과를
보이게 된다. 그림 5.11에서 감소된 제어 대역폭에 대한 버스 임피던스의
3.57kHz 부근의 위상이 기준 대역폭보다 높기 때문에 시스템은 대역폭
설계의 결과를 따르게 되며, 그 결과 시스템이 25W에서 불안정하게 되
는 것으로 설명할 수 있다.
그림 5.14-그림 5.16은 그림 5.12와 그림 5.13의 실험 결과에서 부하
변동의 순간을 확대한 파형을 나타낸다. 전원단의 제어 대역폭이 동일한
실험 결과를 비교하게 되면 부하가 커질수록 부하 변동 시 발생하는 공
진이 수렴하는 시간이 길어지는 것을 확인할 수 있다. 전원단의 제어 대
역폭이 다른 실험 결과를 비교할 시, 제어 대역폭이 작은 결과가 공진이
수렴하는 시간이 길어지는 것을 확인할 수 있다.
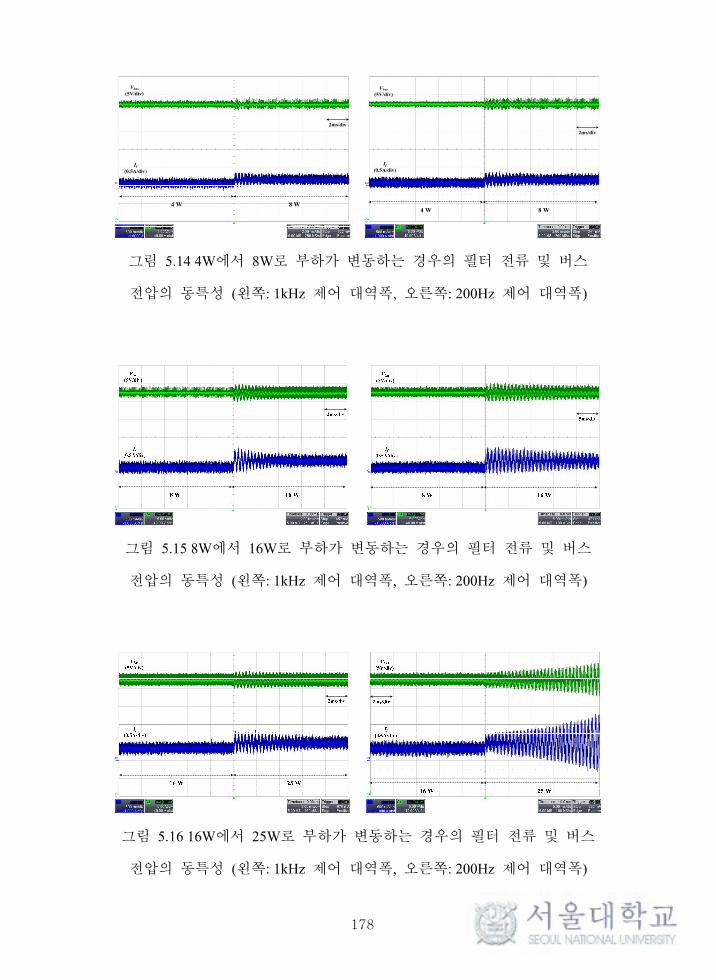
178
8 W4 W
Vbus
(5V/div)
If
(0.5A/div)
2ms/div
8 W4 W
Vbus
(5V/div)
If
(0.5A/div)
2ms/div
그림 5.14 4W에서 8W로 부하가 변동하는 경우의 필터 전류 및 버스
전압의 동특성 (왼쪽: 1kHz 제어 대역폭, 오른쪽: 200Hz 제어 대역폭)
그림 5.15 8W에서 16W로 부하가 변동하는 경우의 필터 전류 및 버스
전압의 동특성 (왼쪽: 1kHz 제어 대역폭, 오른쪽: 200Hz 제어 대역폭)
그림 5.16 16W에서 25W로 부하가 변동하는 경우의 필터 전류 및 버스
전압의 동특성 (왼쪽: 1kHz 제어 대역폭, 오른쪽: 200Hz 제어 대역폭)
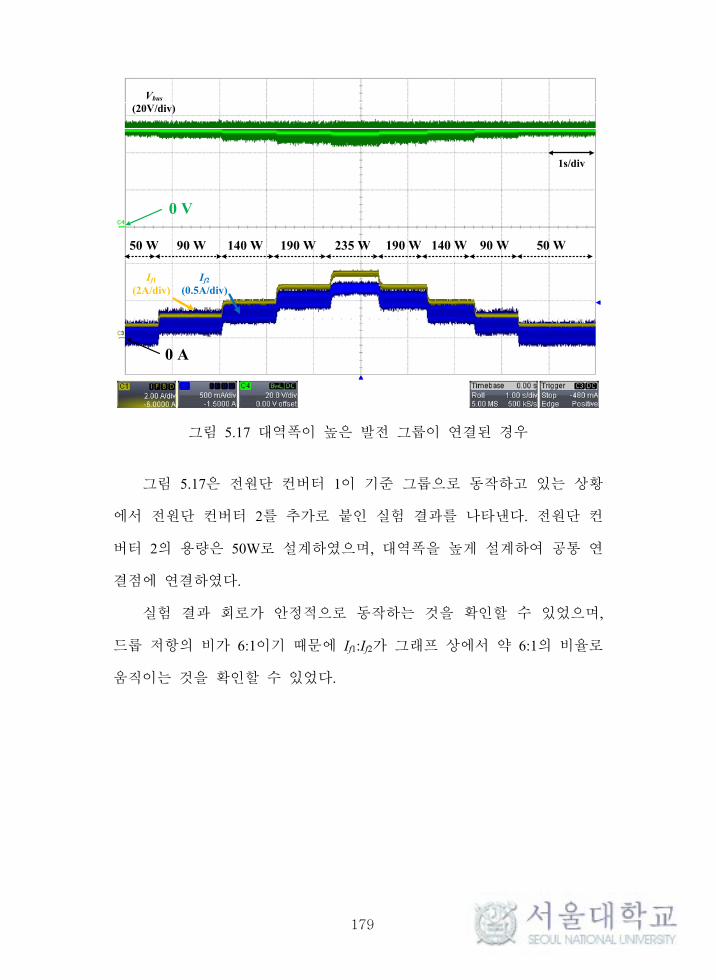
179
1s/div
If1
(2A/div)
Vbus
(20V/div)
50 W 90 W 190 W140 W 235 W
If2
(0.5A/div)
50 W90 W190 W 140 W
0 V
0 A
그림 5.17 대역폭이 높은 발전 그룹이 연결된 경우
그림 5.17은 전원단 컨버터 1이 기준 그룹으로 동작하고 있는 상황
에서 전원단 컨버터 2를 추가로 붙인 실험 결과를 나타낸다. 전원단 컨
버터 2의 용량은 50W로 설계하였으며, 대역폭을 높게 설계하여 공통 연
결점에 연결하였다.
실험 결과 회로가 안정적으로 동작하는 것을 확인할 수 있었으며,
드룹 저항의 비가 6:1이기 때문에 If1:If2가 그래프 상에서 약 6:1의 비율로
움직이는 것을 확인할 수 있었다.
180
5.3 250 V 시스템 설계 및 실험 결과
5.3.1 250 V 시스템 설계
그림 5.18은 실험에 사용된 250V 시스템에 대한 회로를 나타낸다.
벅 컨버터에 기반하는 전원단 컨버터, 케이블 및 부스트 컨버터로 구현
된 부하단 컨버터로 구성된다. 전원단 컨버터의 입력 전압과 부하단 컨
버터의 출력 전압은 DC 파워 서플라이가 공급하는 전압원 Vdc를 공유하
도록 구현되었다.
전원단 컨버터와 부하단 컨버터는 미쓰비시社의 3상 IPM인
PS21A79의 U상과 W상을 통해 각각 구현되었다. 컨버터의 제어는 TI社
의 TMS320C28346을 통해 디지털 제어로 구현하였으며, 제어 블록은 그
림 5.19에 나타난다. 전원단 컨버터에는 V-I 드룹 제어가 적용된 이중 루
프 전압 제어를 적용하였으며, 스위칭 주파수는 18kHz이며 샘플링 주파
수는 36kHz가 사용되었다. 전류 제어 대역폭 및 전압 제어 대역폭은 각
각 1kHz와 100Hz로 설계하였다. 케이블 임피던스는 약 300uH가 사용되
었으며, 해당 값은 그림 0.33uH/m를 기준으로 할 때 케이블의 전체 길이
로 약 1km에 해당하는 값을 나타낸다. 5.1절에서 설명하였듯이 축소 실
험을 진행하기 위해 케이블의 임피던스는 임의로 조정되었다. 케이블은
실제 케이블을 사용하였으며 짧은 길이를 이용하여 인덕턴스를 구현하기
위해 감아서 사용하였다. 부하단 컨버터의 제어로는 2.2kHz 전류 제어
대역폭을 기반으로 하는 정전력 제어가 사용되었으며, 스위칭 주파수는
18kHz이며 샘플링 주파수는 36kHz가 사용되었다. 표 5.2는 실험 시스템
의 스펙 및 파라미터를 정리하여 나타낸다.
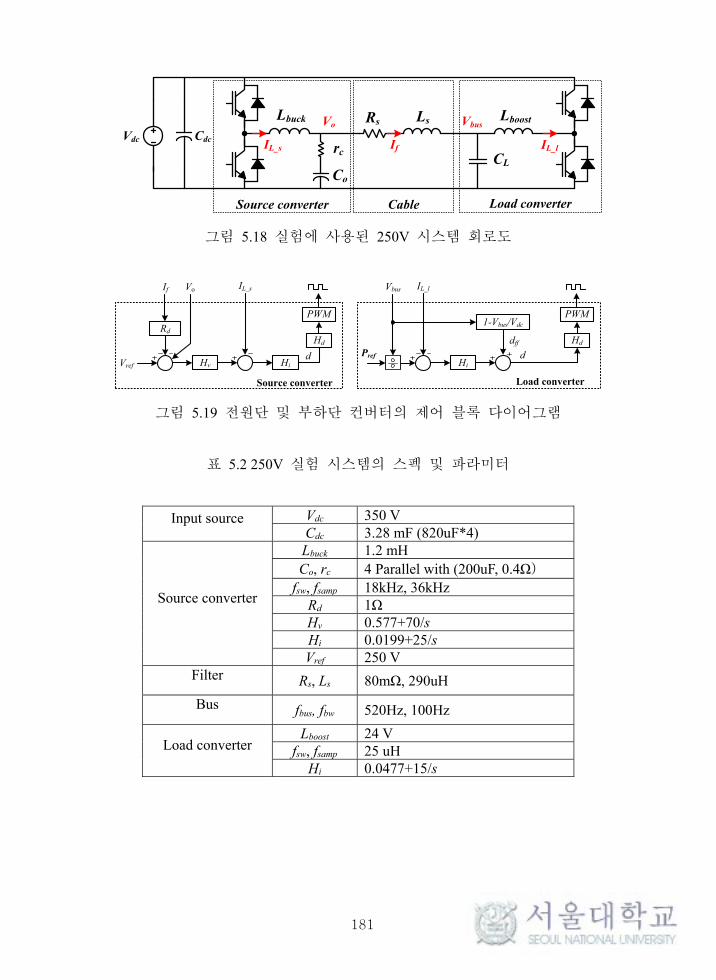
181
Vdc
Lbuck
Co
rc
LsRs
CL
Lboost
Source converter Cable Load converter
VbusVo
IfIL_s IL_lCdc
그림 5.18 실험에 사용된 250V 시스템 회로도
Rd
Vref
If
Hv Hi
IL_s
d
Hd
Vo
PWM
Source converter
Hid
Hd
IL_l
PWM
Load converter
Pref
Vbus
1-Vbus/Vdc
dff
그림 5.19 전원단 및 부하단 컨버터의 제어 블록 다이어그램
표 5.2 250V 실험 시스템의 스펙 및 파라미터
Input source Vdc 350 V Cdc 3.28 mF (820uF*4)
Source converter
Lbuck 1.2 mH Co, rc 4 Parallel with (200uF, 0.4Ω)
fsw, fsamp 18kHz, 36kHz Rd 1Ω Hv 0.577+70/s Hi 0.0199+25/s Vref 250 V
Filter Rs, Ls 80mΩ, 290uH
Bus fbus, fbw 520Hz, 100Hz
Load converter Lboost 24 V
fsw, fsamp 25 uH Hi 0.0477+15/s
182
3kW 정격의 전원단 컨버터에 대하여 무부하 250V 버스 전압을 기
준으로 드룹 전압으로 인한 변동을 약 5% 부근으로 만들도록 드룹 저항
을 1Ω으로 설계하였다. 전원단 컨버터와 필터로 구성된 버스의 대역폭
특징은
576
27
100
bus
cable
bw
f Hz
f Hz
f Hz
(5.6)
로 정리되며, 그림 5.20는 V-I 드룹이 적용된 버스 임피던스와 V-I 드룹
제어에 출력 전류 피드포워드가 추가된 버스 임피던스, 그리고 Rd와 fbw
의 값을 통해 1차 시스템으로 출력 임피던스가 표현되는 경우의 버스 임
피던스를 비교한 보드 선도를 나타낸다. 전원단 컨버터에 적용된 V-I 드
룹 제어와 출력 캐패시터의 ESR의 영향(그림 4.58)으로 인해 100Hz 이상
에서 임피던스의 교점이 형성되는 경우에 설계된 버스 임피던스는 대역
폭 설계에 대해서 충분 조건을 만족하게 된다.

183
-20
0
20
40
60
80
Mag
nitu
de (
dB)
100 102 104 106-45
0
45
90
Pha
se (
deg)
VI droop
VI_FF droop1st order system
Bus impedance
Frequency (Hz)
그림 5.20 버스 임피던스에 대한 보드 선도
부하단 컨버터로 사용되는 부스트 컨버터에 그림 5.19의 제어를 적
용한 결과 얻어지는 입력 임피던스는 다음과 같이 표현된다.
1
1
(1 / )in L
i dc
boost
Z R s
H V
L
(5.7)
ω1은 전류 제어루프의 대역폭에 해당하는 값을 나타낸다. 그림 5.21은
3kW 부하에 해당하는 입력 임피던스를 나타낸 그림으로 부하단 컨버터
가 약 100Hz까지 이상적인 정전력 특성을 나타내며, 2kHz 부근에서 위상
이 45o가 되는 것을 확인할 수 있다. 부하의 제한적인 정전력 특성은 기
존에 가정한 동특성이 무시되는 정전력 부하에 대해 안정한 특성을 나타
내기 때문에 대역폭 설계에 대하여 충분조건으로 동작한다.
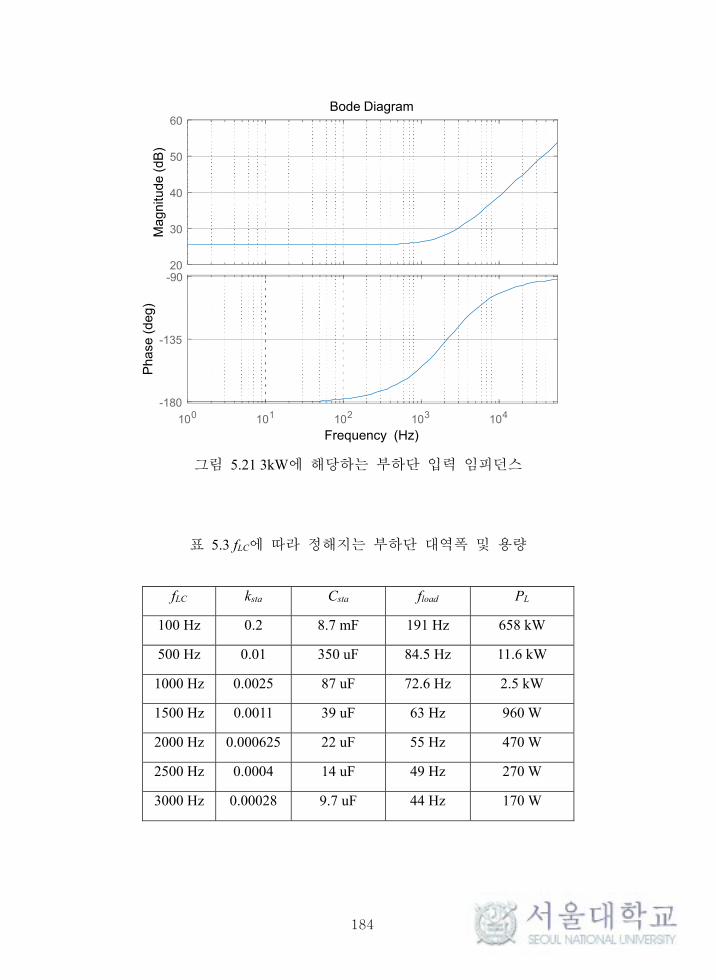
184
20
30
40
50
60
Mag
nitu
de (
dB)
100 101 102 103 104-180
-135
-90
Pha
se (
deg)
Bode Diagram
Frequency (Hz)
그림 5.21 3kW에 해당하는 부하단 입력 임피던스
표 5.3 fLC에 따라 정해지는 부하단 대역폭 및 용량
fLC ksta Csta fload PL
100 Hz 0.2 8.7 mF 191 Hz 658 kW
500 Hz 0.01 350 uF 84.5 Hz 11.6 kW
1000 Hz 0.0025 87 uF 72.6 Hz 2.5 kW
1500 Hz 0.0011 39 uF 63 Hz 960 W
2000 Hz 0.000625 22 uF 55 Hz 470 W
2500 Hz 0.0004 14 uF 49 Hz 270 W
3000 Hz 0.00028 9.7 uF 44 Hz 170 W

185
-10
0
10
20
30
Mag
nitu
de (
dB)
101 102 103 104-180
-135
-90
Pha
se (
deg)
ZlZl(Ideal CPL)
Bode Diagram
Frequency (Hz)
그림 5.22 22uF의 캐패시턴스를 포함한 부하단 컨버터의 입력 임피던스
한편, 식 (5.1)과 fLC 값을 통해 정해지는 ksta, Csta, fload 및 Csta와 fload에
의한 용량을 계산한 결과를 표 5.3에 나타낸다. 여기서 fload에는 fbus, fcable,
fesr로 인한 영향이 모두 계산되었다.
제한된 전원단 컨버터의 용량과 충분 조건으로 설계된 버스 임피던
스 및 부하단 임피던스를 고려하여 부하단 캐패시턴스를 22uF으로 설정
하였으며, 22uF에 대하여 부하단의 입력 임피던스는 그림 5.22에 나타난
다. 설계된 시스템의 교점인 2kHz에서 부하단 임피던스는 이상적인 정전
력 부하를 가정한 경우에 비해 증가된 위상을 가지는 것을 알 수 있다.

186
5.3.2 실험 및 결과
그림 5.23은 본 절의 실험에 대한 시뮬레이션 결과를 나타낸다. (a)는
그림 5.20에서 V-I 드룹 제어가 적용된 전원단 컨버터로 구성된 버스에
동특성이 없는 이상적인 정전력 부하를 연결한 경우에 대한 모의 실험
결과를 나타낸다. 600W에서 800W로 넘어가는 부하 변동에서 시스템의
전압 불안정성이 나타나며, 버스 임피던스의 충분 조건으로 인한 결과로
해석할 수 있다. (b)는 설계된 부스트 컨버터를 부하단 컨버터로 동작시
킨 경우를 나타낸다. 그림 5.22에서 확인한 것처럼 현재 부하단 컨버터의
입력 임피던스가 시스템의 교점인 2kHz에서 증가한 위상을 가지기 때문
에 시스템이 전압 불안정을 나타내는 용량이 2100W에서 2400W로 넘어
가는 구간이라는 것을 알 수 있다. (c)는 그림 5.20에서 출력 전류 피드포
워드를 추가한 V-I 드룹 제어기를 사용한 결과로 기존에 V-I 드룹 제어
기만을 사용한 결과에 비해 위상이 덜 상승하기 때문에, 시스템이 더 넓
은 용량까지 안정한 결과를 나타낸다. (d)는 전원단 제어 대역폭을 100Hz
에서 50Hz로 줄인 결과지만, 설계된 ksta 값이 이미 매우 작은 상태이기
때문에 대역폭을 줄인 결과가 (b)와 유사한 것을 나타낸다. (e)와 (f)는 부
하단 컨버터의 제어 대역폭을 조절한 결과를 나타낸다. (e)는 기존에
2.22kHz에서 3.3kHz로 제어 대역폭을 증가시킨 결과로 시스템이 더 적은
용량에서 전압 불안정성을 나타내며, 대역폭이 증가할수록 (a)의 결과로
수렴하게 된다. 반대로 (f)는 제어 대역폭을 1.11kHz로 낮춘 결과로 3kW
까지 시스템이 동작하는 것을 확인할 수 있다.
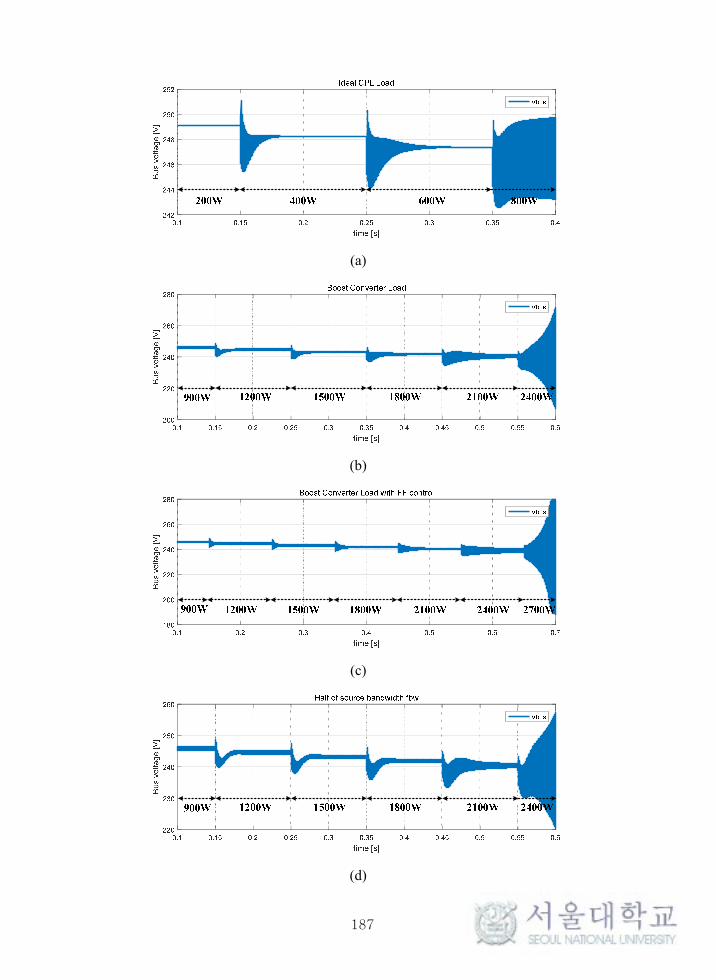
187
(a)
(b)
(c)
(d)
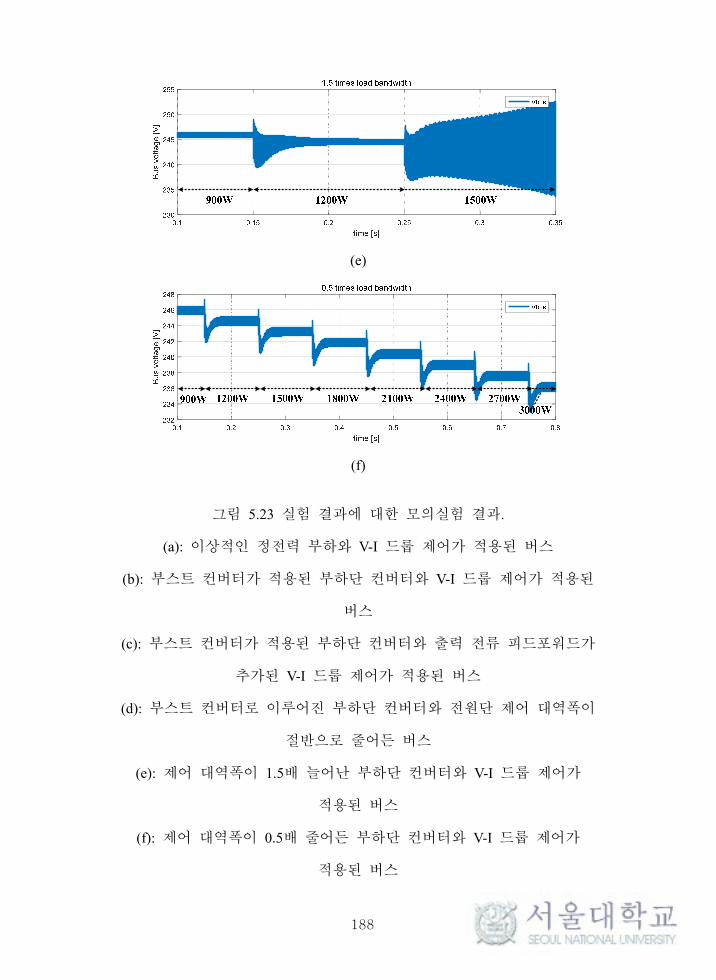
188
(e)
(f)
그림 5.23 실험 결과에 대한 모의실험 결과.
(a): 이상적인 정전력 부하와 V-I 드룹 제어가 적용된 버스
(b): 부스트 컨버터가 적용된 부하단 컨버터와 V-I 드룹 제어가 적용된
버스
(c): 부스트 컨버터가 적용된 부하단 컨버터와 출력 전류 피드포워드가
추가된 V-I 드룹 제어가 적용된 버스
(d): 부스트 컨버터로 이루어진 부하단 컨버터와 전원단 제어 대역폭이
절반으로 줄어든 버스
(e): 제어 대역폭이 1.5배 늘어난 부하단 컨버터와 V-I 드룹 제어가
적용된 버스
(f): 제어 대역폭이 0.5배 줄어든 부하단 컨버터와 V-I 드룹 제어가
적용된 버스

189
그림 5.24 V-I 드룹 제어가 적용된 버스와 22uF의 부하단 캐패시터를
가지는 부하단 컨버터의 실험 결과
그림 5.24는 V-I 드룹 제어가 적용된 전원단 컨버터와 22uF을 부하
단 캐패시터로 가지는 부스트 컨버터로 구성된 부하단 컨버터에 대한 실
험 결과를 나타낸다. Vbus는 버스 전압, If는 케이블 전류이며 Pref는 부하단
컨버터의 파워로 0.5초 마다 출력 용량을 300W씩 증가시키는 상황에 대
하여 실험하였다. 실험 결과 2400W에서 2700W로 넘어가는 구간에서 불
안정한 현상이 나타났으며, 부하가 증가할수록 Pref가 바뀌는 순간에 전
류에서 나타나는 공진이 수렴하는 시간이 길어지는 것을 확인할 수 있다.
시뮬레이션의 결과와 유사하게, 충분 조건으로 인하여 기존의 대역폭 설
계에 의한 용량을 넘어서까지 시스템이 안정하게 동작하는 것을 확인할
수 있다.
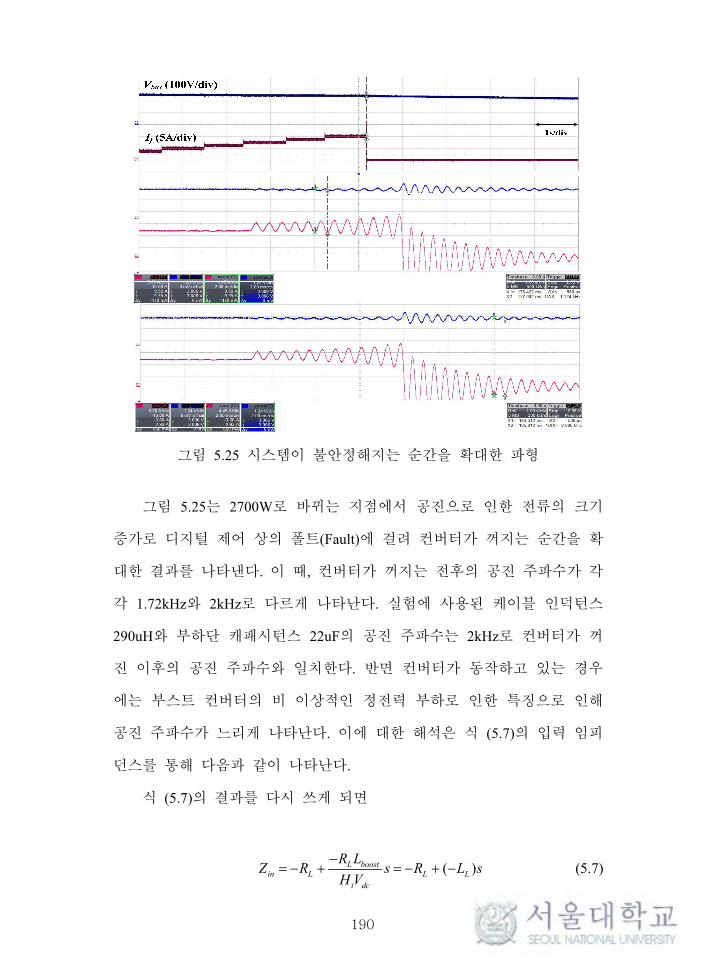
190
그림 5.25 시스템이 불안정해지는 순간을 확대한 파형
그림 5.25는 2700W로 바뀌는 지점에서 공진으로 인한 전류의 크기
증가로 디지털 제어 상의 폴트(Fault)에 걸려 컨버터가 꺼지는 순간을 확
대한 결과를 나타낸다. 이 때, 컨버터가 꺼지는 전후의 공진 주파수가 각
각 1.72kHz와 2kHz로 다르게 나타난다. 실험에 사용된 케이블 인덕턴스
290uH와 부하단 캐패시턴스 22uF의 공진 주파수는 2kHz로 컨버터가 꺼
진 이후의 공진 주파수와 일치한다. 반면 컨버터가 동작하고 있는 경우
에는 부스트 컨버터의 비 이상적인 정전력 부하로 인한 특징으로 인해
공진 주파수가 느리게 나타난다. 이에 대한 해석은 식 (5.7)의 입력 임피
던스를 통해 다음과 같이 나타난다.
식 (5.7)의 결과를 다시 쓰게 되면
( )L boostin L L L
i dc
R LZ R s R L s
H V
(5.7)
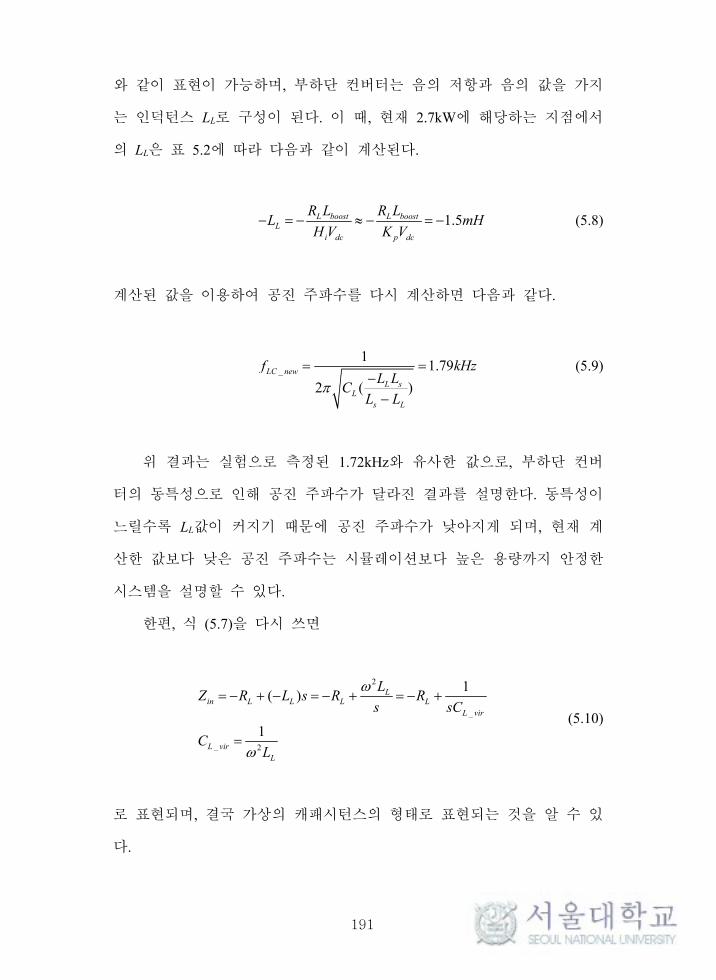
191
와 같이 표현이 가능하며, 부하단 컨버터는 음의 저항과 음의 값을 가지
는 인덕턴스 LL로 구성이 된다. 이 때, 현재 2.7kW에 해당하는 지점에서
의 LL은 표 5.2에 따라 다음과 같이 계산된다.
1.5L boost L boostL
i dc p dc
R L R LL mH
H V K V (5.8)
계산된 값을 이용하여 공진 주파수를 다시 계산하면 다음과 같다.
_
11.79
2 ( )LC new
L sL
s L
f kHzL L
CL L
(5.9)
위 결과는 실험으로 측정된 1.72kHz와 유사한 값으로, 부하단 컨버
터의 동특성으로 인해 공진 주파수가 달라진 결과를 설명한다. 동특성이
느릴수록 LL값이 커지기 때문에 공진 주파수가 낮아지게 되며, 현재 계
산한 값보다 낮은 공진 주파수는 시뮬레이션보다 높은 용량까지 안정한
시스템을 설명할 수 있다.
한편, 식 (5.7)을 다시 쓰면
2
_
_ 2
1( )
1
Lin L L L L
L vir
L virL
LZ R L s R R
s sC
CL
(5.10)
로 표현되며, 결국 가상의 캐패시턴스의 형태로 표현되는 것을 알 수 있
다.
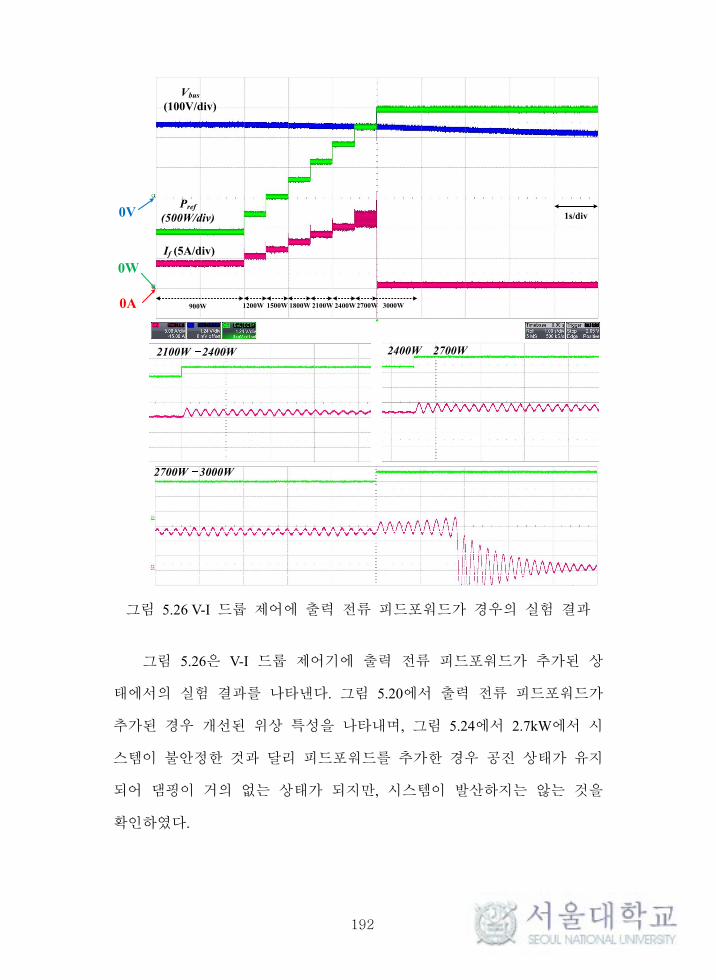
192
1s/div
If (5A/div)
Vbus
(100V/div)
900W 1500W1200W
0W
0VPref
(500W/div)
0A 1800W 2100W 2400W2700W 3000W
2400W 2700W2100W 2400W
2700W 3000W
그림 5.26 V-I 드룹 제어에 출력 전류 피드포워드가 경우의 실험 결과
그림 5.26은 V-I 드룹 제어기에 출력 전류 피드포워드가 추가된 상
태에서의 실험 결과를 나타낸다. 그림 5.20에서 출력 전류 피드포워드가
추가된 경우 개선된 위상 특성을 나타내며, 그림 5.24에서 2.7kW에서 시
스템이 불안정한 것과 달리 피드포워드를 추가한 경우 공진 상태가 유지
되어 댐핑이 거의 없는 상태가 되지만, 시스템이 발산하지는 않는 것을
확인하였다.
193
1s/div
If (5A/div)
Vbus
(100V/div)
900W 1200W
0W
0V
Pref
(500W/div)
0A 1500W 1800W 2100W 2400W 2700W
1500W 1800W 1800W 2100W
2100W 2400W
그림 5.27 V-I 드룹 제어가 적용된 전원단의 제어 대역폭을 50Hz 줄인
결과
그림 5.27은 100Hz로 설계된 전원단의 제어 대역폭을 50Hz로 줄인
실험 결과를 나타낸다. 시뮬레이션 결과와 비슷하게, 제어 대역폭의 변화
가 시스템의 반응에 영향을 주지 않는 것을 확인할 수 있다. 이는 기존
에 100Hz 설계된 ksta가 이미 작은 값으로 fload에 큰 영향을 주지 않으므
로, 제어 대역폭을 줄인 결과 역시 큰 영향이 없기 때문으로 설명된다.

194
그림 5.28 부하단 컨버터의 제어 대역폭을 1.5배 증가시킨 실험 결과
그림 5.28과 부하단 컨버터의 제어 대역폭을 1.5배로 증가시킨 결과
를 나타낸다. 부하단 컨버터의 제어 대역폭을 증가시킨 결과 기존에 비
해 더 낮은 용량에서 시스템이 불안정한 파형을 나타내며, 제어 대역폭
이 올라갈수록 이상적인 정전력 부하의 특징에 가까워지게 됨을 알 수
있다. 또한 이 경우에 관찰되는 공진 주파수는 약 1.86kHz로 이전의
1.72kHz보다 증가되었으며 이는 부하단 컨버터의 동특성이 빨라졌다는
결과로 설명된다.

195
그림 5.29 부하단 컨버터의 제어 대역폭을 0.5배 감소시킨 실험 결과
그림 5.29는 부하단 컨버터의 제어 대역폭을 0.5배로 감소한 결과를
나타낸다. 제어 대역폭이 낮아진 결과 이상적인 정전력 부하의 특징에서
더 멀어지게 되며, 그로 인해 기존에 2700W에서 불안정했던 시스템이
3000W까지 안정성을 유지하는 것을 확인할 수 있다. 또한 파워가
2700W에서 3000W로 움직일 때의 전류 파형에서 확인할 수 있듯이, 공
진 성분이 거의 나타나지 않게 안정한 상태를 유지하는 것을 확인할 수
있다.

196
197
제 6 장 결론 및 향후 과제
6.1 결론
본 논문에서는 대역폭에 기반하여 직류 배전 시스템의 안정도를 고
려한 설계 방법에 대해 제안하였다. 본 논문의 주요한 연구 결과는 다음
과 같이 정리된다.
(1) 대역폭을 활용한 전압 안정도 분석
임피던스에 기반한 안정도 해석의 새로운 방법으로 대역폭을 정의하
였다. 대역폭을 통한 시스템의 안정도 해석은 기존에 제안되었던 임피던
스 판별 방법들의 장점을 합한 것으로 간단한 값을 가지면서 크기와 위
상 정보를 모두 활용한다는 장점이 존재한다. 정의된 대역폭을 기반으로
대역폭과 전압 안정도 사이의 관계에 대하여 분석하였다. 부하단 대역폭
과 버스 대역폭이 ksta라고 정의된 변수를 통해 시스템 안정도를 분석할
수 있음을 살펴보았다. 직류 배전 시스템은 다양한 전원단이 결합될 수
있기 때문에 서로 다른 대역폭을 가진 전원단이 시스템에 연결될 수 있
다. 기존 경우와 달리 전원단의 병렬로 시스템이 불안정해 질 수 있음을
보였으며, 대역폭이 다른 전원단이 병렬로 연결되는 경우의 등가 버스
대역폭에 대하여 분석하였다. 마찬가지로 직류 배전 시스템에서는 플러
그앤플레이의 특징을 가지는 다양한 대역폭을 가진 부하단 컨버터가 존
재할 수 있다. 이에 부하단의 추가가 시스템의 안정도에 미치는 영향을
살펴보았으며, 대역폭이 다른 부하단이 병렬로 연결되는 경우의 등가 부
하단 대역폭에 대하여 분석하였다. 또한 현실적인 고려사항들로 디지털
제어로 인한 샘플링의 영향, V-I 드룹 제어의 출력 임피던스로 인한 영향

198
및 출력 전류 피드포워드의 적용, 캐패시터의 ESR 에 대한 분석 및 대
역폭을 추출하는 방법에 대한 분석을 통해 제안된 대역폭 기반 분석의
현실성에 대해 보완하였다.
(2) 대역폭에 기반한 시스템 설계 방안 제안
분석한 대역폭과 시스템의 안정도 관계를 바탕으로 안정적인 시스템
을 설계하기 위한 방법들에 대하여 제안하였다. 등가 전원단 대역폭의
분석을 통해 여러 가지 시스템 설계 방법 중 기준 그룹-발전 그룹 방식
의 버스 설계와 가상 그룹 방식의 버스 설계를 제안하였다. 기준 그룹-
발전 그룹 방식의 버스 설계는 기준 그룹이 버스 특징을 형성하며, 발전
그룹은 기준 그룹이 제시하는 버스의 특징을 보장하도록 설계하는 방식
이다. 예시 설계를 통해 기준 그룹 및 발전 그룹의 설계를 살펴보았다.
가상 그룹 방식의 버스 설계는 가상의 기준 그룹이 버스 특징을 형성한
다고 가정하여, 버스의 특징을 보장하도록 설계하는 방식으로 동일하게
예시 설계를 진행하였으며, 두 방식의 차이점에 대하여 살펴보았다. 부하
단 시스템을 설계하는 방법으로 최소 캐패시턴스를 배전단에 추가하는
방식과 개별 캐패시턴스를 부과하는 방식에 대하여 제안하였다. 각각의
방법에 대한 예시 설계를 통해 차이점에 대하여 살펴보았다. 제안된 설
계 방법은 시스템을 안정하게 설계할 수 있는 다양한 방법 중 하나로,
이를 통해 향후 직류 배전 시스템의 초기 설계 및 안정적인 운용을 위한
지침으로 사용이 가능할 것으로 기대된다.
마지막으로 축소된 하드웨어 실험을 통해 대역폭 기반의 전압 안정
도 해석 및 시스템 설계의 유효성을 검증하였다.

199
6.2 향후 과제
직류 배전 시스템은 효율 및 신뢰성에 대한 장점을 바탕으로 향후
적용 가능성이 높은 시스템이지만, 현재까지 설계를 위한 정보가 많이
부족한 상황이다. 따라서 다양한 상황에 대한 보편적인 대역폭 값에 대
하여 조사하는 것이 필요하다. 본 논문에서는 편의를 위해 전압원의 입
력으로 일반적인 직류 전압을 사용하였지만, 실제로는 태양광(PV), 배터
리(Battery), AC 계통(grid) 및 연료 전지(Fuel Cell) 등 다양한 종류의 발전
원이 존재한다. 그리고 각 발전원에 존재하는 고유한 특징들로 인해 전
원단 전력변환장치에 여러 가지 제약사항이 발생하게 된다. 또한, 용량에
따라서 전력변환장치에서 얻을 수 있는 최대 성능이 일반적으로 정해진
다. 따라서 발전원의 종류에 따라, 그리고 용량에 따라 얻을 수 있는 일
반적인 전원단 컨버터의 특성을 분류하고 이를 기반으로 버스의 대역폭
에 대한 보편적인 값들에 대한 분석이 요구된다. 그리고 이러한 값들을
통하여 임의의 시스템에 대한 대략적인 설계 기준에 대한 논의가 필요하
다.
부하 대역폭 조건에 대한 세부적인 분석이 요구된다. 본 연구에서
별도의 배전단 캐패시턴스가 존재하지 않는 경우 개별 부하에 최소 캐패
시턴스 조건을 요구하였는데, 이러한 조건은 용량이 낮은 부하에 대해
큰 제약을 가하게 된다. 등가 대역폭 분석 상에서 등가 대역폭이 저항
크기에 대한 내분점에 형성된다는 사실을 이용해, 부하 크기에 따라 다
른 부하 대역폭 조건을 검토하는 것이 필요하다.
본 논문에서는 시스템의 전압 안정도를 소신호 분석에 기반하여 해
석하였기 때문에 음의 저항으로 모델링이 되는 정전력 부하만을 대상으
로 대역폭 분석을 진행하였다. 하지만 대신호 해석의 관점에서 시스템을

200
분석하는 경우 정저항 부하 및 정전류 부하가 버스의 동작 영역에 영향
을 주기 때문에 이를 고려한 분석이 필요하다. 특히, 저항으로 모델링이
가능한 정저항 부하의 정전력 부하에 대해 제시한 대역폭 조건을 마찬가
지로 정저항 부하에 제시함으로써 음의 저항으로 보이는 정전력 부하의
영향을 상쇄할 수 있는 설계가 가능하다. 따라서, 시스템에 존재하는 다
양한 부하에 대한 고려가 추가적으로 요구된다.
본 논문에서는 대역폭을 시스템의 전압 안정도만을 고려하여 분석하
였지만, 실제로는 과도 안정도에 대한 요소 역시 시스템이 중요한 위치
를 차지한다. 따라서, 이를 고려하기 위한 추가적인 연구를 수행할 필요
가 있다.
추가적으로 본 논문에서는 전원단 컨버터의 제어로 분산 제어로 널
리 사용되는 드룹 제어를 적용하여 대역폭 분석을 진행하였다. 하지만
Master-slave 방법에 기반하는 경우에는 단일 모듈이 전압 제어를 수행하
며 나머지 모듈은 전류 제어를 하는 방식으로 동작한다. 이 경우 버스
대역폭에서 드룹 저항이 사라지게 되므로, 해석 결과가 어떻게 바뀌는지
에 대한 연구가 필요하다. 또한, 액티브 댐핑(Active damping) 제어는 특
정 주파수에 대하여 가상의 저항을 추가하는 방식으로 드룹 제어에 적용
하기에는 중복되는 개념이지만, 전압 제어만을 사용하는 Master-slave 제
어에는 적용이 가능하다. 이 경우 액티브 댐핑 제어가 대역폭 설계에 미
치는 영향에 대해서도 연구가 가능하다.

201
참고문헌
[1] G. AlLee and W. Tschudi, "Edison Redux: 380 Vdc Brings Reliability and
Efficiency to Sustainable Data Centers," in IEEE Power and Energy
Magazine, vol. 10, no. 6, pp. 50-59, Nov.-Dec. 2012.
[2] G. S. Seo, J. Baek, K. Choi, H. Bae and B. Cho, "Modeling and analysis
of DC distribution systems," 8th International Conference on Power
Electronics - ECCE Asia, Jeju, 2011, pp. 223-227.
[3] J. M. Carrasco et al., "Power-Electronic Systems for the Grid Integration
of Renewable Energy Sources: A Survey," in IEEE Transactions on
Industrial Electronics, vol. 53, no. 4, pp. 1002-1016, June 2006.
[4] G. Wu, S. Kodama, Y. Ono and Y. Monma, "A hybrid microgrid system
including renewable power generations and energy storages for supplying
both the DC and AC loads," 2012 International Conference on Renewable
Energy Research and Applications (ICRERA), Nagasaki, 2012, pp. 1-5.
[5] International Energy Agency, Medium-Term Renewable Energy Market
Report. IEA, 2013.
[6] 에너지관리공단 신재생에너지센터, 4 Jan. 2014, http://rps.kemco.or.kr
[7] D. J. Hammerstrom, "AC Versus DC Distribution SystemsDid We Get it
Right?" 2007 IEEE Power Engineering Society General Meeting, Tampa,
FL, 2007, pp. 1-5.
[8] M. E. Baran and N. R. Mahajan, "DC distribution for industrial systems:
opportunities and challenges," in IEEE Transactions on Industry
Applications, vol. 39, no. 6, pp. 1596-1601, Nov.-Dec. 2003.
[9] D. Boroyevich, I. Cvetkovic, R. Burgos and D. Dong, "Intergrid: A Future
Electronic Energy Network?," in IEEE Journal of Emerging and Selected
Topics in Power Electronics, vol. 1, no. 3, pp. 127-138, Sept. 2013.
[10] D. Boroyevich, I. Cvetković, D. Dong, R. Burgos, F. Wang and F. Lee,

202
"Future electronic power distribution systems a contemplative
view," 2010 12th International Conference on Optimization of Electrical
and Electronic Equipment, Basov, 2010, pp. 1369-1380.
[11] E. Rodriguez-Diaz, F. Chen, J. C. Vasquez, J. M. Guerrero, R. Burgos and
D. Boroyevich, "Voltage-Level Selection of Future Two-Level LVdc
Distribution Grids: A Compromise Between Grid Compatibiliy, Safety,
and Efficiency," in IEEE Electrification Magazine, vol. 4, no. 2, pp. 20-28,
June 2016.
[12] V. Sithimolada and P. W. Sauer, "Facility-level DC vs. typical ac
distribution for data centers: A comparative reliability study," TENCON
2010 - 2010 IEEE Region 10 Conference, Fukuoka, 2010, pp. 2102-2107.
[13] B. R. Shrestha, T. M. Hansen and R. Tonkoski, "Reliability analysis of
380V DC distribution in data centers," 2016 IEEE Power & Energy
Society Innovative Smart Grid Technologies Conference (ISGT),
Minneapolis, MN, 2016, pp. 1-5.
[14] G. Wawrzola, "Challenges of DC data center power distribution
protection," 13th International Conference on Development in Power
System Protection 2016 (DPSP), Edinburgh, 2016, pp. 1-6.
[15] A. Pratt, P. Kumar and T. V. Aldridge, "Evaluation of 400V DC
distribution in telco and data centers to improve energy
efficiency," INTELEC 07 - 29th International Telecommunications Energy
Conference, Rome, 2007, pp. 32-39.
[16] T. Babasaki, T. Tanaka, Y. Nozaki, T. Tanaka, T. Aoki and F. Kurokawa,
"Developing of higher voltage direct-current power-feeding prototype
system," INTELEC 2009 - 31st International Telecommunications Energy
Conference, Incheon, 2009, pp. 1-5.
[17] H. Kakigano, Y. Miura and T. Ise, "Low-Voltage Bipolar-Type DC
Microgrid for Super High Quality Distribution," in IEEE Transactions on
Power Electronics, vol. 25, no. 12, pp. 3066-3075, Dec. 2010.
203
[18] X. Liu, P. Wang and P. C. Loh, "A Hybrid AC/DC Microgrid and Its
Coordination Control," in IEEE Transactions on Smart Grid, vol. 2, no. 2,
pp. 278-286, June 2011.
[19] J. M. Guerrero, P. C. Loh, T. L. Lee and M. Chandorkar, "Advanced
Control Architectures for Intelligent Microgrids—Part II: Power Quality,
Energy Storage, and AC/DC Microgrids," in IEEE Transactions on
Industrial Electronics, vol. 60, no. 4, pp. 1263-1270, April 2013.
[20] D. Salomonsson, L. Soder and A. Sannino, "Protection of Low-Voltage
DC Microgrids," in IEEE Transactions on Power Delivery, vol. 24, no. 3,
pp. 1045-1053, July 2009.
[21] A. Kwasinski, "Quantitative Evaluation of DC Microgrids Availability:
Effects of System Architecture and Converter Topology Design Choices,"
in IEEE Transactions on Power Electronics, vol. 26, no. 3, pp. 835-851,
March 2011.
[22] G. Melath, D. Kapse and V. Agarwal, "A loss optimized and cost effective
droop control scheme for a DC microgrid integrated with a weak rural
distribution grid," 2016 IEEE International Conference on Power
Electronics, Drives and Energy Systems (PEDES), Trivandrum, 2016, pp.
1-6.
[23] E. Rodriguez-Diaz, A. Anvari-Moghaddam, J. C. Vasquez and J. M.
Guerrero, "Multi-level energy management and optimal control of a
residential DC microgrid," 2017 IEEE International Conference on
Consumer Electronics (ICCE), Las Vegas, NV, 2017, pp. 312-313.
[24] D. Magdefrau, T. Taufik, M. Poshtan and M. Muscarella, "Analysis and
review of DC microgrid implementations," 2016 International Seminar on
Application for Technology of Information and Communication
(ISemantic), Semarang, 2016, pp. 241-246.
[25] C. Phurailatpam, B. S. Rajpurohit and L. Wang, "Optimization of DC
microgrid for rural applications in India," 2016 IEEE Region 10

204
Conference (TENCON), Singapore, 2016, pp. 3610-3613.
[26] A. Shekhar, L. Ramírez-Elizondo and P. Bauer, "DC microgrid islands on
ships," 2017 IEEE Second International Conference on DC Microgrids
(ICDCM), Nuremburg, 2017, pp. 111-118.
[27] A. Francés, R. Asensi, O. García, R. Prieto and J. Uceda, "How to model a
DC microgrid: Towards an automated solution," 2017 IEEE Second
International Conference on DC Microgrids (ICDCM), Nuremburg, 2017,
pp. 609-616.
[28] D. Kumar, F. Zare and A. Ghosh, "DC Microgrid Technology: System
Architectures, AC Grid Interfaces, Grounding Schemes, Power Quality,
Communication Networks, Applications, and Standardizations Aspects,"
in IEEE Access, vol. 5, pp. 12230-12256, 2017.
[29] 이재용, “[ZOOM UP_한국전력] 진도군·LS산전과 직류배전망
실증사업 착수,” Electric Power 제 10권 제 9호, 68쪽, 2016년 9월.
[30] Z. Jin, G. Sulligoi, R. Cuzner, L. Meng, J. C. Vasquez and J. M. Guerrero,
"Next-Generation Shipboard DC Power System: Introduction Smart Grid
and dc Microgrid Technologies into Maritime Electrical Netowrks,"
in IEEE Electrification Magazine, vol. 4, no. 2, pp. 45-57, June 2016.
[31] F. D. Kanellos, G. J. Tsekouras and J. Prousalidis, "Onboard DC grid
employing smart grid technology: challenges, state of the art and future
prospects," in IET Electrical Systems in Transportation, vol. 5, no. 1, pp.
1-11, 3 2015.
[32] B. Sarlioglu and C. T. Morris, "More Electric Aircraft: Review,
Challenges, and Opportunities for Commercial Transport Aircraft,"
in IEEE Transactions on Transportation Electrification, vol. 1, no. 1, pp.
54-64, June 2015.
[33] P. Kundur et al., "Definition and classification of power system stability
IEEE/CIGRE joint task force on stability terms and definitions," in IEEE
Transactions on Power Systems, vol. 19, no. 3, pp. 1387-1401, Aug. 2004.
205
[34] Y. Jang and R. W. Erickson, “Physical origins of input filter oscillations in
current programmed converters,” IEEE Trans. Power Electron., vol. 7, no.
4, pp. 725-733, Oct. 1992.
[35] C. Wan, M. Huang, C. K. Tse and X. Ruan, "Effects of Interaction of
Power Converters Coupled via Power Grid: A Design-Oriented Study,"
in IEEE Transactions on Power Electronics, vol. 30, no. 7, pp. 3589-3600,
July 2015.
[36] M. Belkhayat, “Stability criteria for ac power systems with regulated
loads,” Ph. D. dissertation, Purdue Univ., West Lafayette, IN, USA, Dec.
1997.
[37] 김병헌, “약한 교류 배전 계통에 연계되는 대용량 PCS의 제어기
설계에 따른 안정도 해석 및 안정적 운용을 위한 설계 방안,”
박사학위논문, 서울대학교, 2016.
[38] Jian Sun, "Input impedance analysis of single-phase PFC converters,"
in IEEE Transactions on Power Electronics, vol. 20, no. 2, pp. 308-314,
March 2005.
[39] “IEEE Recommended Practice for 1 kV to 35 kV Medium-Voltage DC
Power Systems on Ships,” IEEE Std 1709-2010, 2010.
[40] A. Riccobono and E. Santi, "Comprehensive Review of Stability Criteria
for DC Power Distribution Systems," in IEEE Transactions on Industry
Applications, vol. 50, no. 5, pp. 3525-3535, Sept.-Oct. 2014.
[41] R. D. Middlebrook, “Input filter considerations in design and application
of switching regulators,” in Conf. Rec. IEEE IAS Annu. Meeting, 1976, pp.
366–382.
[42] C. M. Wildrick, F. C. Lee, B. H. Cho, and B. Choi, “A method of defining
the load impedance specification for a stable distributed power system,”
IEEE Trans. Power Electron., vol. 10, no. 3, pp. 280–285, May 1995.
[43] X. Feng, Z. Ye, K. Xing, F. C. Lee, and D. Borojevic, “Impedance
specification and impedance improvement for dc distributed power
206
system,” in Proc. 30th IEEE PESC, 1999, vol. 2, pp. 889–894.
[44] X. Feng, Z. Ye, K. Xing, F. C. Lee, and D. Borojevic, “Individual load
impedance specification for a stable dc distributed power system,” in Proc.
14th Annu. IEEE APEC Expo., Mar. 14–18, 1999, vol. 2, pp. 923–929.
[45] X. Feng, J. Liu, and F. C. Lee, “Impedance specifications for stable dc
distributed power systems,” IEEE Trans. Power Electron., vol. 17, no. 2,
pp. 157–162, Mar. 2002.
[46] S. D. Sudhoff, S. F. Glover, P. T. Lamm, D. H. Schmucker, and D. E.
Delisle, “Admittance space stability analysis of power electronic
systems,” IEEE Trans. Aerosp. Electron., vol. 36, no. 3, pp. 965–973, Jul.
2000.
[47] S. D. Sudhoff and S. F. Glover, “Three-dimensional stability analysis of
dc power electronics based systems,” in Proc. 31st IEEE PESC, 2000, vol.
1, pp. 101–106.
[48] S. D. Sudhoff and J. M. Crider, “Advancements in generalized immittance
based stability analysis of dc power electronics based distribution
systems,” in Proc. IEEE ESTS, Apr. 10–13, 2011, pp. 207–212.
[49] X. Wang, R. Yao, and F. Rao, “Three-step impedance criterion for small-
signal stability analysis in two-stage dc distributed power systems,” IEEE
Power Electron. Lett., vol. 1, no. 3, pp. 83–87, Sep. 2003.
[50] L. Guo, Y. Feng, X. Li, C. Wang and Y. Li, "Stability analysis of a DC
microgrid with master-slave control structure," 2014 IEEE Energy
Conversion Congress and Exposition (ECCE), Pittsburgh, PA, 2014, pp.
5682-5689.
[51] A. P. N. Tahim, D. J. Pagano, E. Lenz and V. Stramosk, "Modeling and
Stability Analysis of Islanded DC Microgrids Under Droop Control,"
in IEEE Transactions on Power Electronics, vol. 30, no. 8, pp. 4597-4607,
Aug. 2015.
[52] J. Chen and J. Chen, "Stability Analysis and Parameters Optimization of
207
Islanded Microgrid with Both Ideal and Dynamic Constant Power Loads,"
in IEEE Transactions on Industrial Electronics, vol. PP, no. 99, pp. 1-1.
[53] Y. Huangfu, S. Pang, B. Nahid-Mobarakeh, L. Guo, A. K. Rathore and F.
Gao, "Stability Analysis and Active Stabilization of On-board DC Power
Converter System with Input Filter," in IEEE Transactions on Industrial
Electronics, vol. PP, no. 99, pp. 1-1.
[54] P. Magne, B. Nahid-Mobarakeh and S. Pierfederici, "Dynamic
Consideration of DC Microgrids With Constant Power Loads and Active
Damping System—A Design Method for Fault-Tolerant Stabilizing
System," in IEEE Journal of Emerging and Selected Topics in Power
Electronics, vol. 2, no. 3, pp. 562-570, Sept. 2014.
[55] J. Chen and J. Chen, "Stability Analysis and Parameters Optimization of
Islanded Microgrid with Both Ideal and Dynamic Constant Power Loads,"
in IEEE Transactions on Industrial Electronics, vol. PP, no. 99, pp. 1-1.
[56] L. Guo, S. Zhang, X. Li, Y. W. Li, C. Wang and Y. Feng, "Stability
Analysis and Damping Enhancement Based on Frequency-Dependent
Virtual Impedance for DC Microgrids," in IEEE Journal of Emerging and
Selected Topics in Power Electronics, vol. 5, no. 1, pp. 338-350, March
2017.
[57] M. Wu and D. D. C. Lu, "A Novel Stabilization Method of LC Input Filter
With Constant Power Loads Without Load Performance Compromise in
DC Microgrids," in IEEE Transactions on Industrial Electronics, vol. 62,
no. 7, pp. 4552-4562, July 2015.
[58] D. Marx, P. Magne, B. Nahid-Mobarakeh, S. Pierfederici and B. Davat,
"Large Signal Stability Analysis Tools in DC Power Systems With
Constant Power Loads and Variable Power Loads—A Review," in IEEE
Transactions on Power Electronics, vol. 27, no. 4, pp. 1773-1787, April
2012.
[59] 김혜진, “직류 전력 시스템의 대신호 전압 안정도 해석 및 능동

208
댐핑을 통한 전압 안정화,” 박사학위논문, 서울대학교, 2016.
[60] P. Magne, B. Nahid-Mobarakeh and S. Pierfederici, "DC-Link Voltage
Large Signal Stabilization and Transient Control Using a Virtual
Capacitor," 2010 IEEE Industry Applications Society Annual Meeting,
Houston, TX, 2010, pp. 1-8.
[61] P. Magne, D. Marx, B. Nahid-Mobarakeh and S. Pierfederici, "Large-
Signal Stabilization of a DC-Link Supplying a Constant Power Load
Using a Virtual Capacitor: Impact on the Domain of Attraction," in IEEE
Transactions on Industry Applications, vol. 48, no. 3, pp. 878-887, May-
June 2012.
[62] D. Marx, S. Pierfederici and B. Davat, "Nonlinear control of an inverter
motor drive system with input filter — large signal analysis of the DC-
link voltage stability," 2008 IEEE Power Electronics Specialists
Conference, Rhodes, 2008, pp. 498-503.
[63] A. Griffo, J. Wang and D. Howe, "Large signal stability analysis of DC
power systems with constant power loads," 2008 IEEE Vehicle Power and
Propulsion Conference, Harbin, 2008, pp. 1-6.
[64] D. Marx, S. Pierfederici, B. Nahid-Mobarakeh and B. Davat,
"Contribution to Determination of Domain of Attraction in Power
Systems: Application to Drives with Input Filter," 2009 IEEE Industry
Applications Society Annual Meeting, Houston, TX, 2009, pp. 1-8.
[65] B. P. Loop, S. D. Sudhoff, S. H. Zak and E. L. Zivi, "Estimating Regions
of Asymptotic Stability of Power Electronics Systems Using Genetic
Algorithms," in IEEE Transactions on Control Systems Technology, vol.
18, no. 5, pp. 1011-1022, Sept. 2010.
[66] L. Herrera, W. Zhang and J. Wang, "Stability Analysis and Controller
Design of DC Microgrids With Constant Power Loads," in IEEE
Transactions on Smart Grid, vol. 8, no. 2, pp. 881-888, March 2017.
[67] P. Magne, B. Nahid-Mobarakeh and S. Pierfederici, "General Active
209
Global Stabilization of Multiloads DC-Power Networks," in IEEE
Transactions on Power Electronics, vol. 27, no. 4, pp. 1788-1798, April
2012.
[68] M. K. Zadeh, R. Gavagsaz-Ghoachani, J. P. Martin, B. Nahid-Mobarakeh,
S. Pierfederici and M. Molinas, "Discrete-Time Modeling, Stability
Analysis, and Active Stabilization of DC Distribution Systems With
Multiple Constant Power Loads," in IEEE Transactions on Industry
Applications, vol. 52, no. 6, pp. 4888-4898, Nov.-Dec. 2016.
[69] Y. Zhao, W. Qiao and D. Ha, "A Sliding-Mode Duty-Ratio Controller for
DC/DC Buck Converters With Constant Power Loads," in IEEE
Transactions on Industry Applications, vol. 50, no. 2, pp. 1448-1458,
March-April 2014.
[70] Mingfei Wu and D. D. C. Lu, "Adding virtual resistance in source side
converters for stabilization of cascaded connected two stage converter
systems with constant power loads in DC microgrids," 2014 International
Power Electronics Conference (IPEC-Hiroshima 2014 - ECCE ASIA),
Hiroshima, 2014, pp. 3553-3556.
[71] P. Liutanakul, A. B. Awan, S. Pierfederici, B. Nahid-Mobarakeh and F.
Meibody-Tabar, "Linear Stabilization of a DC Bus Supplying a Constant
Power Load: A General Design Approach," in IEEE Transactions on
Power Electronics, vol. 25, no. 2, pp. 475-488, Feb. 2010.
[72] Y. A.-R. Mohamed, A. A. A. Radwan, and T. Lee, "Decoupled reference
voltage-based active DC-link stabilization for PMSM drives with tight-
speed regulation," IEEE Trans. Ind. Electron., vol. 59, no. 12, pp. 4523-
4536, 2012.
[73] K. Pietiläinen, L. Harnefors, A. Petersson, and H.-P. Nee, "DC-link
stabilization and voltage sag ride-through of inverter drives," IEEE Trans.
Ind. Electron., vol. 53, no. 4, pp. 1261-1268, 2006.
[74] X. Liu, A. J. Forsyth, and A. M. Cross, "Negative input-resistance

210
compensator for a constant power load," IEEE Trans. Ind. Electron., vol.
54, no. 6, pp. 3188-3196, 2007.
[75] H. Mosskull, J. Galić, and B. Wahlberg, "Stabilization of induction motor
drives with poorly damped input filters," IEEE Trans. Ind. Electron., vol.
54, no. 5, pp. 2724-2734, 2007.
[76] K. A. Potty, E. Bauer, H. Li, B. Hu and J. Wang, "Smart resistor: Dynamic
stabilization of constant power loads in DC microgrids with high
bandwidth power converters and energy storage," 2017 IEEE Applied
Power Electronics Conference and Exposition (APEC), Tampa, FL, 2017,
pp. 2795-2801.
[77] H. J. Kim, S. W. Kang, G. S. Seo, P. Jang and B. H. Cho, "Large-Signal
Stability Analysis of DC Power System With Shunt Active Damper,"
in IEEE Transactions on Industrial Electronics, vol. 63, no. 10, pp. 6270-
6280, Oct. 2016.
[78] X. Wang, F. Blaabjerg and M. Liserre, "An active damper to suppress
multiple resonances with unknown frequencies," 2014 IEEE Applied
Power Electronics Conference and Exposition - APEC 2014, Fort Worth,
TX, 2014, pp. 2184-2191.
[79] X. Wang, F. Blaabjerg, M. Liserre, Z. Chen, J. He and Y. Li, "An Active
Damper for Stabilizing Power-Electronics-Based AC Systems," in IEEE
Transactions on Power Electronics, vol. 29, no. 7, pp. 3318-3329, July
2014.
[80] X. Zhang, D. M. Vilathgamuwa, K. J. Tseng, B. S. Bhangu and C. J.
Gajanayake, "Power Buffer With Model Predictive Control for Stability of
Vehicular Power Systems With Constant Power Loads," in IEEE
Transactions on Power Electronics, vol. 28, no. 12, pp. 5804-5812, Dec.
2013.
[81] X. Zhang, X. Ruan, H. Kim and C. K. Tse, "Adaptive Active Capacitor
Converter for Improving Stability of Cascaded DC Power Supply

211
System," in IEEE Transactions on Power Electronics, vol. 28, no. 4, pp.
1807-1816, April 2013.
[82] Y. Gu, W. Li and X. He, "Passivity-Based Control of DC Microgrid for
Self-Disciplined Stabilization," in IEEE Transactions on Power Systems,
vol. 30, no. 5, pp. 2623-2632, Sept. 2015.
[83] Y. Gu, W. Zheng, W. Li and X. He, "Self-disciplined stabilization of DC
microgrids by passivity-based control," 2015 IEEE Applied Power
Electronics Conference and Exposition (APEC), Charlotte, NC, 2015, pp.
1838-1844.
[84] A. Riccobono and E. Santi, "A novel Passivity-Based Stability Criterion
(PBSC) for switching converter DC distribution systems," 2012 Twenty-
Seventh Annual IEEE Applied Power Electronics Conference and
Exposition (APEC), Orlando, FL, 2012, pp. 2560-2567.
[85] T. Hailu, L. Mackay, M. Gajic and J. A. Ferreira, "From voltage stiff to
voltage weak DC distribution grid: Opportunities and challenges," 2016
IEEE 2nd Annual Southern Power Electronics Conference (SPEC),
Auckland, 2016, pp. 1-6.
[86] D. Chen, L. Xu and J. Yu, "Adaptive DC Stabilizer With Reduced DC
Fault Current for Active Distribution Power System Application," in IEEE
Transactions on Power Systems, vol. 32, no. 2, pp. 1430-1439, March
2017.
[87] 백종복, “신재생 에너지원과 에너지 저장장치가 연계된 직류
배전 시스템의 제어 및 안정도 해석,” 박사학위논문, 서울대학교,
2014.
[88] S. Anand and B. G. Fernandes, "Reduced-Order Model and Stability
Analysis of Low-Voltage DC Microgrid," in IEEE Transactions on
Industrial Electronics, vol. 60, no. 11, pp. 5040-5049, Nov. 2013.
[89] F. Gao et al., "Comparative Stability Analysis of Droop Control
Approaches in Voltage-Source-Converter-Based DC Microgrids," in IEEE

212
Transactions on Power Electronics, vol. 32, no. 3, pp. 2395-2415, March
2017.
[90] A. R. Bergen, “Power Systems Analysis”, Prentice Hall, 2000.
[91] (2007). California Electrical Code.
http://www.electrician2.com/tables/Table9_1.pdf
[92] (2017). 중저압케이블. http://www.lscns.co.kr/_lib/download.asp?aDir
=prod/AA001/kr&file=20160426095545147.pdf&nfile=중저압케이블_
영문.pdf
[93] (2002). National Electrical Code – Allowable Ampacities of Insulated
Conductors Rated 0-2000 Volts. http://www.usawire-
cable.com/pdfs/nec%20ampacities.pdf
[94] K. Ogata, “Modern Control Engineering”, Prentice Hall, 2002.
[95] M. Su, Z. Liu, Y. Sun, H. Han and X. Hou, "Stability Analysis and
Stabilization methods of DC Microgrid with Multiple Parallel-Connected
DC-DC Converters loaded by CPLs," in IEEE Transactions on Smart
Grid, vol. PP, no. 99, pp. 1-1.
[96] F. Gao, S. Bozhko, A. Costabeber, G. Asher and P. Wheeler, "Control
Design and Voltage Stability Analysis of a Droop-Controlled Electrical
Power System for More Electric Aircraft," in IEEE Transactions on
Industrial Electronics, vol. 64, no. 12, pp. 9271-9281, Dec. 2017.
[97] F. Chen, W. Zhang, R. Burgos and D. Boroyevich, "Droop voltage range
design in DC micro-grids considering cable resistance," 2014 IEEE
Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA,
2014, pp. 770-777.
213
Abstract
Bandwidth-Based Stability Analysis and Design Specification for DC
Distribution Systems
Sang-Woo Kang
Department of Electrical Engineering and Computer Science
The Graduate School
Seoul National University
In this paper, a method for stable design of DC distribution
system is studied. Stable design of the DC distribution system is
important because the stability of the DC distribution system may
become unstable due to the reduced damping by the negative
resistance characteristic of the constant power load-emulated
power converter. In the case of the impedance criteria used as
normal system design method, it is complicated to be used as
design tool because the impedance magnitude and phase must be
considered at the same time, and there is a limit to apply to the DC
distribution system in which the structure of the component can
vary.
In this paper, we analyze the stability of the system through the
bandwidth defined as the pass-band frequency of the first-order
filter. Bandwidth has not only a clear value, but also includes the
magnitude and phase information of the impedance, so there is a

214
great advantage in using it as design information. In this paper, we
first define the bandwidth for the bus and load converter through
component modeling of the DC distribution system. Then, based on
the Nyquist stability criterion, the relationship between the
bandwidth and the voltage stability is analyzed. We also derive the
relationship between the bandwidth of the bus and the bandwidth of
load converter.
The DC distribution system can be composed of independent
multiple sources and loads. We analyze the equivalent bus
bandwidth when multiple sources with different bandwidth are
connected in parallel. In addition, we analyze the equivalent load
bandwidth in the case where load converters with different
bandwidth are connected in parallel. Based on the analyzed results,
a design method for designing a stable DC distribution system is
proposed. In order to maintain a stable bus, we propose a power
stage design based on a reference group – generating group and a
power stage design based on a virtual group, and the example
design is verified through simulation. And practical considerations
required for actual design are analyzed.
To verify the proposed bandwidth-based stability analysis,
miniaturized systems were constructed and the results of the
bandwidth analysis were verified through experiments.
Keywords : DC distribution system, voltage stability, bandwidth,
droop control, constant power load
Student Number : 2013-20735


















