
Depositadora/Extrusora Painel de Operação para Os tipos ... · Depositadora/Extrusora Painel de...
195
Depositadora/Extrusora Painel de Operação para Os tipos V50, V45, 4100, 4300, 4500, 5000 e 5100 Nestlé, Brasil
Transcript of Depositadora/Extrusora Painel de Operação para Os tipos ... · Depositadora/Extrusora Painel de...

Depositadora/Extrusora Painel de Operação para Os tipos V50, V45, 4100, 4300, 4500, 5000 e 5100
Nestlé, Brasil

Página 2 Projecto Nº.: 106246
Projecto Nº: 106246 Página 3
ÍNDICE 1 Segurança ......................................................................................................... 11
1.1 Recomendações de Segurança ............................................................................................... 11
1.1.1 Pessoal .................................................................................................................................... 11
1.1.2 O Local de Trabalho ................................................................................................................ 12
1.1.3 Operação, Limpeza e Manutenção .......................................................................................... 12
1.1.4 Equipamento de Segurança .................................................................................................... 13
1.2 Cortina de luz ........................................................................................................................... 13
1.3 Isolamento ............................................................................................................................... 13
1.4 Interruptor de Segurança no Funil (Extrusora) ......................................................................... 13
1.5 Paragem Segura ...................................................................................................................... 14
1.5.1 Paragem Segura para Manutenção e Reparação .................................................................... 14
1.5.2 Paragem Segura para Limpeza ............................................................................................... 14
2 Painel de Operação e Comunicação PLC ....................................................... 15
2.1 Informações acerca do Painel de Operação ............................................................................ 15
2.2 PLC .......................................................................................................................................... 15
2.3 Configuração da EtherNet ....................................................................................................... 15
2.3.1 Endereços IP ........................................................................................................................... 15
2.3.2 Máscara Sub Net ..................................................................................................................... 15
3 Operação Geral do Painel de toque ................................................................ 17
3.1 Níveis DO USUÁRIO ............................................................................................................... 17
3.2 Controlo Principal (tela Inicial) ................................................................................................. 18
3.3 Tela de senha .......................................................................................................................... 19
3.3.1 Receita Actual .......................................................................................................................... 20
3.3.2 Informações da Máquina ......................................................................................................... 21
3.3.3 Usuário .................................................................................................................................... 21
3.3.4 Botão de Alarme ...................................................................................................................... 22
3.4 Receita ..................................................................................................................................... 24
3.4.1 Nome da Receita ..................................................................................................................... 25
3.4.2 Carregar receita ....................................................................................................................... 26
3.4.3 Guardar Receita....................................................................................................................... 27
3.4.4 Copiar Receita ......................................................................................................................... 28
3.4.5 Eliminar Receita ....................................................................................................................... 29
3.5 Produção ................................................................................................................................. 30
3.5.1 Limpar a tela Táctil ................................................................................................................... 31
3.5.2 A Máquina Precisa de Manutenção ......................................................................................... 32

Página 4 Projecto Nº.: 106246
3.5.3 Data e Hora .............................................................................................................................. 32
3.5.4 Produtos Produzidos ................................................................................................................ 32
3.5.5 Botões Iniciar/Parar .................................................................................................................. 33
3.6 Limpeza .................................................................................................................................... 34
3.7 Manual ...................................................................................................................................... 35
3.8 Configurações........................................................................................................................... 36
3.8.1 Como Alterar a Data e a Hora .................................................................................................. 36
3.8.2 Evolução da máquina ............................................................................................................... 37
3.8.3 Backup dAS Receitas ............................................................................................................... 39
3.8.4 Tendências para as Unidades de Equipamento em Geral........................................................ 40
3.9 Modo de Operação (Painel de Modo da Máquina) ................................................................... 42
3.9.1 Modo de Operação (Painel Secundário) ................................................................................... 42
3.9.2 Selecção de idioma .................................................................................................................. 43
3.9.3 Manutenção .............................................................................................................................. 44
3.10 Alarmes .................................................................................................................................... 45
3.10.1 Tela Alarmes Activos ................................................................................................................ 45
3.10.2 Histórico de Alarmes ................................................................................................................. 47
3.10.3 Tela Alarmes de Parada de Emergência .................................................................................. 49
3.10.4 Tela Alarmes do Servo ............................................................................................................. 50
3.10.5 Diagnóstico do Painel ............................................................................................................... 52
3.10.6 Anúncio de Alarme ................................................................................................................... 53
3.10.7 Alarmes Gerais da Máquina ..................................................................................................... 54
3.10.8 Alarmes de Parada de Emergência na Depositadora ............................................................... 56
3.10.9 Alarmes do escudo de segurança na Depositadora ................................................................. 57
3.10.10 Descrição de Alarmes do Servo ............................................................................................... 59
3.11 Informações da Máquina .......................................................................................................... 62
3.11.1 Informações Gerais da Máquina ............................................................................................... 62
3.11.2 Informações da Máquina relacionadas à gestão de Receitas ................................................... 64
3.11.3 Informações da Máquina relacionadas aos Cartões Flash Compactos .................................... 64
4 Máquina e o Termo Máquina ........................................................................... 65
4.1 Operação .................................................................................................................................. 66
4.2 Máquina em Geral .................................................................................................................... 66
5 A máquina é escrava de Velocidade da Esteira do Forno ............................ 67
6 Nível .................................................................................................................. 69
6.1 Produção .................................................................................................................................. 69
6.2 Mover a Cabeça de Depositadora para Cima e para Baixo ...................................................... 69
Projecto Nº: 106246 Página 5
6.3 Configurações .......................................................................................................................... 70
6.3.1 Nível Mínimo para Cabeça Depositadora ................................................................................ 70
6.3.2 Nível DE CALIBRAÇÃO ........................................................................................................... 71
6.3.3 Calibrar o Nível ........................................................................................................................ 72
6.4 Limpeza ................................................................................................................................... 73
6.5 Informações da Máquina ......................................................................................................... 73
6.6 Alarmes .................................................................................................................................... 73
7 Regulador - Servo ............................................................................................ 75
7.1 Operação ................................................................................................................................. 75
7.2 Automático ............................................................................................................................... 76
7.2.1 Regulador 1-4 .......................................................................................................................... 76
7.3 CAM do Regulador Calculada Automaticamente ..................................................................... 78
7.3.1 Tendência da Unidade Reguladora ......................................................................................... 79
7.3.2 Estimar a Cabeça Depositadora 1-3 com a Unidade Reguladora ............................................ 79
7.3.3 Estimar o TRANSPORTADOR DE ELEVAÇÃO com a Unidade Reguladora .......................... 80
7.3.4 Estimar o Corte de Agulha com a Unidade Reguladora .......................................................... 81
7.3.5 Estimar o Alicate de Corte Eléctrico com a Unidade Reguladora ............................................ 81
7.3.6 CAM do Regulador .................................................................................................................. 81
7.3.7 Cálculos CAM .......................................................................................................................... 81
7.3.8 Limites ao Cálculo CAM ........................................................................................................... 82
7.3.9 Calcular e Testar o CAM .......................................................................................................... 82
7.3.10 Apresentação de Informação relacionada com a ALTERação e Teste do CAM ...................... 85
7.3.11 Curva CAM .............................................................................................................................. 86
7.3.12 Como calcular e Testar o CAM ................................................................................................ 88
7.3.13 Como Deslocar o CAM Testado para o CAM em Funcionamento ........................................... 89
7.4 Projecção Manual de CAM do Regulador ................................................................................ 89
7.4.1 Tendência da Unidade Reguladora ......................................................................................... 90
7.4.2 Estimar as Cabeças Depositadoras 1-3 com a Unidade Reguladora ...................................... 90
7.4.3 Estimar o Transportador de elevação com a Unidade Reguladora .......................................... 90
7.4.4 Estimar o Corte de Agulha com a Unidade Reguladora .......................................................... 91
7.4.5 Estimar o Alicate de Corte Eléctrico com a Unidade Reguladora ............................................ 91
7.4.6 CAM do Regulador .................................................................................................................. 91
7.4.7 Curva CAM .............................................................................................................................. 91
7.4.8 Projectar e Testar o CAM ........................................................................................................ 92
7.4.9 Apresentação de Informação relacionada com a ALTERação e Teste do CAM ...................... 94
7.4.10 Como Projectar e Testar um Novo CAM (por exemplo, com uma Curva do Regulador) ......... 95
Página 6 Projecto Nº.: 106246
7.4.11 Como Projectar, testar e deslocar o CAM testado para o CAM em Funcionamento ................ 96
7.4.12 Como Deslocar o CAM Testado para o CAM em Funcionamento ............................................ 97
7.5 Configurações........................................................................................................................... 98
7.5.1 Descrição Técnica da Unidade Reguladora.............................................................................. 99
7.5.2 Importante: Se os Servomotores tiverem sido desmantelados ................................................. 99
7.5.3 Basear a Unidade Reguladora.................................................................................................. 99
7.5.4 Aviso: Quando Deslocar Separadamente com os Reguladores 1 e 2 .................................... 100
7.5.5 Tendência do Regulador 1 ..................................................................................................... 100
7.5.6 Tendência do Regulador 2 ..................................................................................................... 101
7.6 Manual .................................................................................................................................... 102
7.7 Informações da Máquina ........................................................................................................ 102
7.8 Alarmes .................................................................................................................................. 104
8 Cabeças Depositadoras 1 a 3 ........................................................................ 105
8.1 Operação ................................................................................................................................ 107
8.2 Modos da Cabeça Depositadora em Geral ............................................................................. 107
8.2.1 Como alterar a direcção da Depositadora (Bombas doseadoras) .......................................... 107
8.2.2 Direcção da Depositadora ao Carregar Nova Receita ............................................................ 107
8.2.3 Impulso zero e sistema servo ................................................................................................. 107
8.3 Modo da Depositadora (Modo Automático) ............................................................................ 108
8.3.1 Rolo de Alimentação ............................................................................................................... 108
8.3.2 Bomba Doseadora (Depósito 1 e Vácuo) ............................................................................... 109
8.4 Modo da Depositadora (Modo Avançado) .............................................................................. 111
8.4.1 Rolo de Alimentação ............................................................................................................... 111
8.4.2 Bomba Doseadora (Depósito 1 a 3 e Vácuo) ......................................................................... 112
8.5 Extrusão (Modo Contínuo) ...................................................................................................... 115
8.5.1 Rolo de Alimentação ............................................................................................................... 115
8.5.2 Bomba doseadora .................................................................................................................. 115
8.6 Modo Depositadora (ligado à Máquina) .................................................................................. 116
8.6.1 Velocidade do rolo de alimentação [º/P] ................................................................................. 116
8.6.2 Velocidade da Depositadora [º/P] ........................................................................................... 116
8.7 Configurações......................................................................................................................... 117
8.7.1 Movimento para a Base da Bomba Doseadora ...................................................................... 117
8.7.2 Bloqueio Excêntrico na Caixa da Bomba ................................................................................ 118
8.7.3 Tendência do Rolo de Alimentação ........................................................................................ 119
8.7.4 Tendência da Bomba Doseadora (Depósito) .......................................................................... 119
8.8 Limpeza .................................................................................................................................. 121

Projecto Nº: 106246 Página 7
8.9 Manual ................................................................................................................................... 123
8.9.1 Rolo de Alimentação .............................................................................................................. 123
8.9.2 Bomba doseadora .................................................................................................................. 123
8.10 Informações da Máquina ....................................................................................................... 124
8.11 Alarmes .................................................................................................................................. 125
9 Alicate de Corte Eléctrico .............................................................................. 127
9.1 Operação ............................................................................................................................... 127
9.2 Alicate de Corte Eléctrico no geral ......................................................................................... 127
9.2.1 Como Alterar a Direcção do Alicate de Corte Eléctrico .......................................................... 127
9.2.2 Direcção do Alicate de Corte Eléctrico ao Carregar Nova Receita ........................................ 128
9.2.3 Deslocação com o Alicate de Corte Eléctrico ........................................................................ 128
9.2.4 Impulso zero e sistema servo ................................................................................................ 128
9.3 Automático ............................................................................................................................. 129
9.3.1 “Posição Inicial”...................................................................................................................... 129
9.3.2 “Iniciar alicate de corte” e “Parar alicate de corte”: ................................................................ 130
9.3.3 “Graus do Alicate de Corte” ................................................................................................... 130
9.3.4 “Graus Máx. do Alicate de Corte” ........................................................................................... 130
9.4 Avançado ............................................................................................................................... 131
9.4.1 “Posição Inicial”...................................................................................................................... 132
9.4.2 “Iniciar alicate de corte” e “Parar alicate de corte” ................................................................. 132
9.4.3 “Graus do Alicate de Corte” e “Graus Iniciais do Alicate de Corte ......................................... 132
9.4.4 “Graus Máx. do Alicate de Corte” ........................................................................................... 132
9.5 Ligado à máquina .................................................................................................................. 134
9.5.1 Desvio do Alicate de Corte .................................................................................................... 134
9.6 Configurações ........................................................................................................................ 134
9.7 Tendência do Alicate de Corte Eléctrico ................................................................................ 135
9.8 Manual ................................................................................................................................... 135
9.9 Informações da Máquina ....................................................................................................... 136
9.10 Alarmes .................................................................................................................................. 137
10 Transportador ................................................................................................. 139
10.1 Operação ............................................................................................................................... 139
10.2 Automático ............................................................................................................................. 140
10.3 Avançado ............................................................................................................................... 142
10.4 Contínuo ................................................................................................................................ 143
10.5 Ligado à máquina .................................................................................................................. 144
10.6 Configurações ........................................................................................................................ 145
Página 8 Projecto Nº.: 106246
10.6.1 Controlo da Esteira ................................................................................................................. 146
10.6.2 Estimar o Transportador ......................................................................................................... 149
10.7 Limpeza .................................................................................................................................. 149
10.8 Manual .................................................................................................................................... 151
10.9 Informações da Máquina ........................................................................................................ 151
10.10 Alarmes .................................................................................................................................. 153
11 Para Cima e para Baixo ................................................................................. 155
11.1 Operação ................................................................................................................................ 155
11.2 Automático para Cortador ou Transportador .......................................................................... 156
11.2.1 Posição de Início .................................................................................................................... 157
11.2.2 MOVIMENTO.......................................................................................................................... 157
11.2.3 VELOCIDADE......................................................................................................................... 157
11.2.4 ac. máx. (Aceleração Máxima) ............................................................................................... 157
11.3 CAM para cortador ou transportador ...................................................................................... 158
11.3.1 Apresentação do Depósito ..................................................................................................... 159
11.3.2 Apresentação do regulador..................................................................................................... 159
11.3.3 Apresentação da agulha ......................................................................................................... 160
11.3.4 Apresentação do Alicate de corte eléctrico”............................................................................ 160
11.3.5 Apresentação do Cortador ...................................................................................................... 161
11.3.6 Desvio ..................................................................................................................................... 161
11.3.7 Velocidade de Teste ............................................................................................................... 161
11.3.8 Projectar e Testar o CAM ....................................................................................................... 162
11.3.9 controlo de pontos cam .......................................................................................................... 162
11.3.10 Apresentações de informação ao alterar e testar o CAM ....................................................... 164
11.3.11 Exemplo de Projecção e Teste de um CAM Novo .................................................................. 166
11.4 Configurações......................................................................................................................... 168
11.4.1 Limite MÁXIMO DE VELOCIDADE. ........................................................................................ 168
11.4.2 limite de acel. máxima No modo cam ..................................................................................... 168
11.4.3 limite de acel. máxima NO modo auto. ................................................................................... 168
11.4.4 Tolerância de erro de posição ................................................................................................ 169
11.4.5 limite máximo de VIAGEM do cortador (opcional) .................................................................. 169
11.4.6 limite máximo de VIAGEM do transportador (opcional) .......................................................... 169
11.4.7 Base de para Cima e para Baixo ............................................................................................ 170
11.4.8 Tendência para cima e para baixo .......................................................................................... 171
11.5 Limpeza .................................................................................................................................. 172
11.6 Manual .................................................................................................................................... 173

Projecto Nº: 106246 Página 9
11.6.1 Para Cima e para Baixo ......................................................................................................... 173
11.7 Informações da Máquina ....................................................................................................... 174
11.8 Alarmes .................................................................................................................................. 175
12 Guilhotina ....................................................................................................... 177
12.1 Operação ............................................................................................................................... 177
12.2 Guilhotina em Geral ............................................................................................................... 177
12.2.1 Pos. Guilhotina....................................................................................................................... 177
12.2.2 Velocidade da Guilhotina ....................................................................................................... 177
12.2.3 Comprimento do Produto da Guilhotina ................................................................................. 177
12.2.4 Desloque com a Guilhotina: ................................................................................................... 177
12.2.5 Impulso zero e sistema servo ................................................................................................ 177
12.3 Automático ............................................................................................................................. 178
12.3.1 “Início da Guilhotina” e “Paragem da Guilhotina” ................................................................... 178
12.3.2 “Graus da Guilhotina” ............................................................................................................. 179
12.3.3 “Graus Máx. da Guilhotina” .................................................................................................... 179
12.4 Contínuo ................................................................................................................................ 180
12.4.1 Velocidade da Guilhotina ....................................................................................................... 180
12.5 Ligado ao Mestre ................................................................................................................... 181
12.5.1 DesLOCAçÃO Guilhotina: ...................................................................................................... 181
12.6 Configurações ........................................................................................................................ 182
12.7 Estimar a Guilhotina ............................................................................................................... 182
12.8 Manual ................................................................................................................................... 182
12.9 Informações da Máquina ....................................................................................................... 183
12.10 Alarmes .................................................................................................................................. 183
13 Unidade de Aspersão ..................................................................................... 185
13.1 Operação ............................................................................................................................... 185
13.2 Contínuo ................................................................................................................................ 185
13.3 Informações da Máquina ....................................................................................................... 185
13.4 Alarmes .................................................................................................................................. 186
14 Rolo de prensa ............................................................................................... 187
14.1 Operação ............................................................................................................................... 187
14.2 Contínuo ................................................................................................................................ 187
14.3 Manual ................................................................................................................................... 188
14.4 Informações da Máquina ....................................................................................................... 188
14.5 Alarmes .................................................................................................................................. 188
15 LÂMINA ROTATIVA ........................................................................................ 189
Página 10 Projecto Nº.: 106246
15.1 Operação ................................................................................................................................ 189
15.2 Produção ................................................................................................................................ 190
15.3 Manual .................................................................................................................................... 191
15.4 Informações da Máquina ........................................................................................................ 191
15.5 Alarmes .................................................................................................................................. 191
16 Alimentação da massa................................................................................... 193
16.1 Produção ................................................................................................................................ 193
16.2 Configurações......................................................................................................................... 194
16.3 Limpeza .................................................................................................................................. 194
16.4 Manual .................................................................................................................................... 194
16.5 Informações da Máquina ........................................................................................................ 194
16.6 Alarmes .................................................................................................................................. 194
Projecto Nº: 106246 Página 11
1 SEGURANÇA Este capítulo descreve as recomendações de segurança gerais para a operação e a manutenção da depositadora/extrusora V50. Ainda assim, é de extrema importância que o pessoal de operação e manutenção conheça igualmente as recomendações de segurança de operação e manutenção específicas descritas no capítulo Segurança, Zonas de Perigo no manual de manutenção.
AVISO Risco de lesões do pessoal e danos do equipamento: As recomendações descritas neste
capítulo devem ser respeitadas durante a operação, limpeza e manutenção/reparação da
depositadora.
AVISO Risco de encravamento/risco de danos ao equipamento: Nunca coloque as suas mãos ou
objectos entre os rolos de alimentação ranhurados, durante a operação da depositadora.
1.1 RECOMENDAÇÕES DE SEGURANÇA
1.1.1 PESSOAL
• Certifique-se de que o pessoal responsável pela operação e manutenção da máquina conhece toda a documentação relevante e de que esta se encontra sempre facilmente acessível. O pessoal deve ainda conhecer as recomendações de segurança para o equipamento fornecido pelos sub-fornecedores e bens de consumo da HAAS-MEINCKE (consulte o capítulo Folhas de Dados no manual de manutenção).
• Certifique-se de que o pessoal conhece a localização de todos os botões de parada de emergência. • Recomenda-se que o pessoal responsável pela operação, manutenção e reparação da máquina
possua conhecimentos básicos de primeiros socorros. Deve, no mínimo, conhecer a localização do Kit de Primeiros Socorros e ter acesso a um telefone e ao número de telefone da assistência médica.
• Pessoal não qualificado deverá ser mantido a uma distância de segurança da máquina. A HAAS-MEINCKE recomenda a marcação de uma zona de segurança em redor da máquina com fita no solo ou uma barreira.
Página 12 Projecto Nº.: 106246
1.1.2 O LOCAL DE TRABALHO
• Certifique-se de que existe luz de trabalho suficiente na máquina, isto é, 300 lux no
mínimo.
• Para o manuseio de peças pesadas como, por exemplo, a cabeça de depósito, a HAAS-
MEINCKE recomenda a instalação de uma grua móvel sob o tecto, por cima do
sistema.
1.1.3 OPERAÇÃO, LIMPEZA E MANUTENÇÃO
• Antes do arranque da máquina, certifique-se de que não há quaisquer ferramentas ou objectos esquecidos no funil e de que todos os parafusos, escudos/protecções de segurança e mecanismos de paragem de segurança se encontram apertados correctamente.
• Devido aos materiais plásticos utilizados na cabeça de depósito, a temperatura da água a ser ligada aos sistemas de circulação de água quente/fria (consulte o capítulo Descrição do Sistema, A Estrutura da Cabeça de Depósito no manual de manutenção) e ao dispositivo de lavagem (consulte o capítulo Limpeza e Manutenção, Dispositivo de Lavagem no manual de manutenção (o dispositivo de lavagem constitui equipamento opcional)) não deverá exceder os 60ºC. Temperaturas mais elevadas provocarão uma dilatação dos componentes, podendo danificar a máquina durante a operação.
• A máquina deverá ser parada de acordo com o capítulo 1.5 Paragem Segura antes de ser efectuada a respectiva manutenção. Caso seja necessário efectuar a manutenção ou reparação da máquina durante o seu funcionamento, deverão encontrar-se presentes no mínimo duas pessoas. Uma destas pessoas deve estar preparada para activar uma parada de emergência a qualquer altura.
• Se a máquina se encontrar ligada a uma fonte de alimentação de ar comprimido, ventile o sistema desligando o sistema de tratamento de ar.
• Evite a utilização de ar comprimido durante a limpeza, uma vez que poderão ser projectadas partículas de massa para os olhos.
• Os trabalhos eléctricos deverão ser efectuados apenas por pessoal qualificado que conheça o sistema eléctrico da máquina e a respectiva operação.
• Evite colocar-se sobre as placas das extremidades ou peças salientes (por exemplo, motores ou caixas de transmissão), uma vez que esses componentes poderão ser escorregadios.
Projecto Nº: 106246 Página 13
1.1.4 EQUIPAMENTO DE SEGURANÇA
• O piso pode encontrar-se oleoso e escorregadio, por isso, deverá utilizar calçado antiderrapante.
• Evite vestuário largo, gravatas e cabelo solto, pois podem ficar presos nas peças móveis da máquina.
• É recomendável utilizar uma máscara durante trabalhos com produtos empoeirados (por exemplo, farinha ou açúcar).
• É recomendável utilizar óculos de protecção durante a limpeza com sistemas de limpeza de alta pressão/mangueiras de água e/ou agentes de limpeza.
• Não são necessários protectores auditivos para utilização da depositadora, uma vez que o ruído transportado pelo ar será de 80 db(A), no máximo. No entanto, recomenda-se a sua utilização se o nível de ruído exceder os 85 db(A).
1.2 CORTINA DE LUZ
A versão depositadora da máquina V50 pode ser equipada com uma cortina de luz. A cortina de luz interrompe a operação da máquina, caso seja quebrado um feixe de luz. Quebrar um feixe de luz corresponde à activação de uma parada de emergência. Consulte o capítulo 3.10.3 Tela Alarmes de Parada de Emergência. Neste capítulo, descreve-se como iniciar a máquina após uma parada de emergência. Para dados técnicos e uma descrição da cortina de luz, consulte o capítulo Folhas de Dados no manual de manutenção.
1.3 ISOLAMENTO
A depositadora possui peças rotativas revestidas por um escudo para evitar lesões.
Os escudos são constituídos, em parte, por portas bloqueadas para as quais são necessárias chaves, e em parte por escudos de placas.
1.4 INTERRUPTOR DE SEGURANÇA NO FUNIL (EXTRUSORA)
O funil na versão extrusora da máquina encontra-se equipado com um interruptor de segurança que desliga o controlo de voltagem, caso o funil seja retirado. Quando o controlo de voltagem é ligado novamente, segue-se um procedimento de arranque normal.
Página 14 Projecto Nº.: 106246
1.5 PARAGEM SEGURA
Botão de paragem segura no painel de controlo.
A máquina está equipada com paradas de emergência (veja o capítulo 3.10.3 Tela Alarmes de Parada de Emergência). De forma a minimizar o risco de acidentes provocados pelo arranque não intencional da máquina durante a manutenção ou reparação, a máquina deve ser parada no modo de segurança antes do início dos trabalhos.
1.5.1 PARAGEM SEGURA PARA MANUTENÇÃO E REPARAÇÃO
1. Pare a máquina através do menu de tela actual no painel de operação. 2. Desligue o interruptor principal da máquina V50. Ligue o interruptor principal quando os trabalhos de
manutenção/reparação forem concluídos. 3. Antes de a máquina poder ser novamente iniciada, o botão reiniciar azul deve ser activado.
1.5.2 PARAGEM SEGURA PARA LIMPEZA
1. Pare a máquina através do menu de tela actual no painel de operação. 2. Desligue o controlo de tensão activando a parada de emergência (pressione e largue). 3. Antes de a máquina poder ser novamente iniciada, o botão reiniciar azul deve ser activado.
Projecto Nº: 106246 Página 15
2 PAINEL DE OPERAÇÃO E COMUNICAÇÃO PLC
2.1 INFORMAÇÕES ACERCA DO PAINEL DE OPERAÇÃO
Software: Rockwell Software inc.: Factory Talk View Studio Hardware: Allen-Bradley: PanelView Plus 1000 com comunicação de EtherNet para PLC
2.2 PLC
Software: Rockwell Software inc.: RSLogix 5000 Hardware: Allen-Bradley: Control Logix, CPU 5561, Compact Logix L32E ou L35E
2.3 CONFIGURAÇÃO DA ETHERNET
2.3.1 ENDEREÇOS IP
172.16.001.001: Rockwell Modem (Telefone) 172.16.001.003: Rockwell Modem (Telefone) 172.16.001.005: Secomea Sitemanager (Ethernet) (…..006, 007 Etc.) 172.16.001.150: Depositadora 1, Control Logix PLC. 172.16.001.155: Depositadora 1, Painel do Operador. 172.16.001.160: Depositadora 2, Control Logix PLC. (Para mais que uma Máquina Meincke numa linha) 172.16.001.165: Depositadora 2, Painel do Operador. (Para mais que uma Máquina Meincke numa linha) 172.16.001.170: Corte-a-fio, Control Logix PLC. (Para mais que uma Máquina Meincke numa linha) 172.16.001.175: Corte-a-fio, Painel do Operador. (Para mais que uma Máquina Meincke numa linha) 172.16.001.190: Guilhotina, Control Logix PLC. (Máquina Autónoma). 172.16.001.195: Guilhotina, Painel do Operador. (Máquina Autónoma).
2.3.2 MÁSCARA SUB NET
255,255.255,0

Página 16 Projecto Nº.: 106246

Projecto Nº: 106246 Página 17
3 OPERAÇÃO GERAL DO PAINEL DE TOQUE Nota: As imagens de tela neste manual foram tiradas de diferentes modelos de máquinas. A máquina fornecida poderá ter uma configuração distinta e, por isso, o esquema das imagens de telas poderá diferir. No entanto, a operação e navegação em telas é independente do equipamento da máquina.
3.1 NÍVEIS DO USUÁRIO
A operação do painel de operação encontra-se dividida por diferentes níveis do usuário, cada um deles com uma senha e direitos do usuário, de acordo com a seguinte tabela.
Nível do usuário
Nome do usuário Direitos do usuário
0 Operador Pode carregar receitas e iniciar/parar a depositadora. 1 Responsável pela
Produção Usuários de nível 0, manuseio de todas as receitas e Alteração do Modo de Operação.
2 Manutenção Usuários de nível 1 e Alteração de Configurações. 3 Técnico de Assistência
HAAS-MEINCKE Usuários de nível 2.
Página 18 Projecto Nº.: 106246
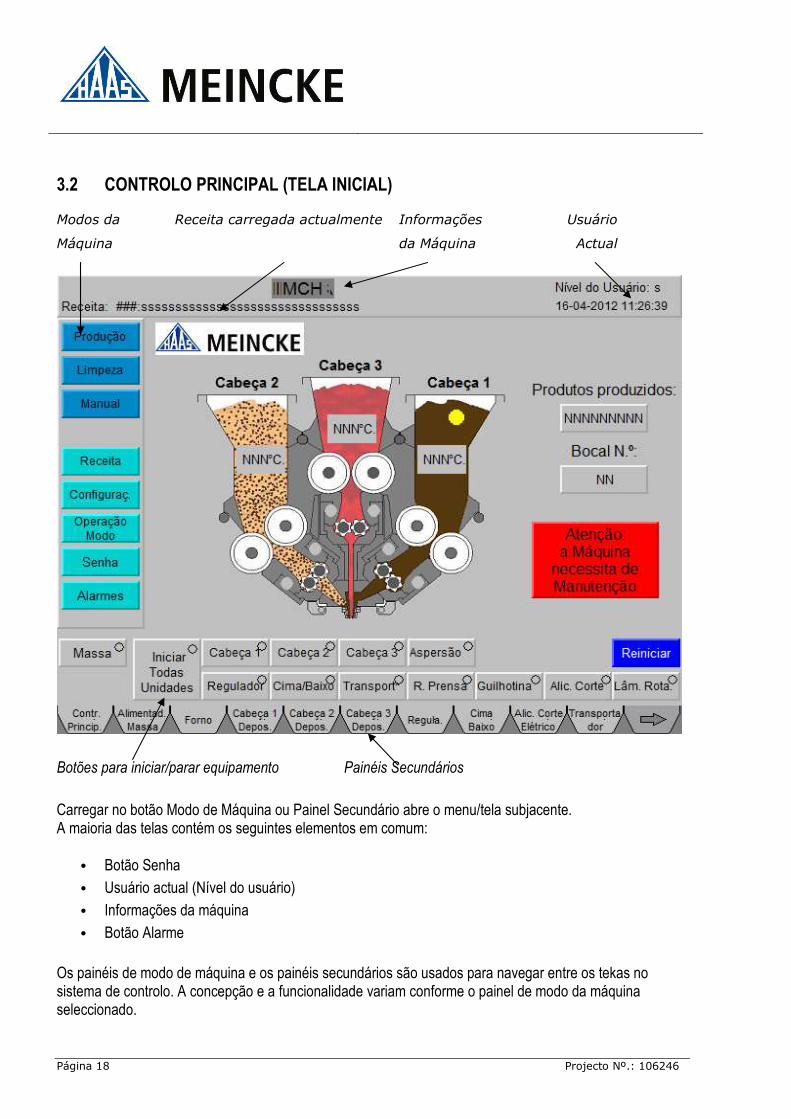
3.2 CONTROLO PRINCIPAL (TELA INICIAL)
Modos da
Máquina
Receita carregada actualmente Informações
da Máquina
Usuário
Actual
Botões para iniciar/parar equipamento Painéis Secundários
Carregar no botão Modo de Máquina ou Painel Secundário abre o menu/tela subjacente. A maioria das telas contém os seguintes elementos em comum:
• Botão Senha
• Usuário actual (Nível do usuário)
• Informações da máquina
• Botão Alarme Os painéis de modo de máquina e os painéis secundários são usados para navegar entre os tekas no sistema de controlo. A concepção e a funcionalidade variam conforme o painel de modo da máquina seleccionado.
Projecto Nº: 106246 Página 19
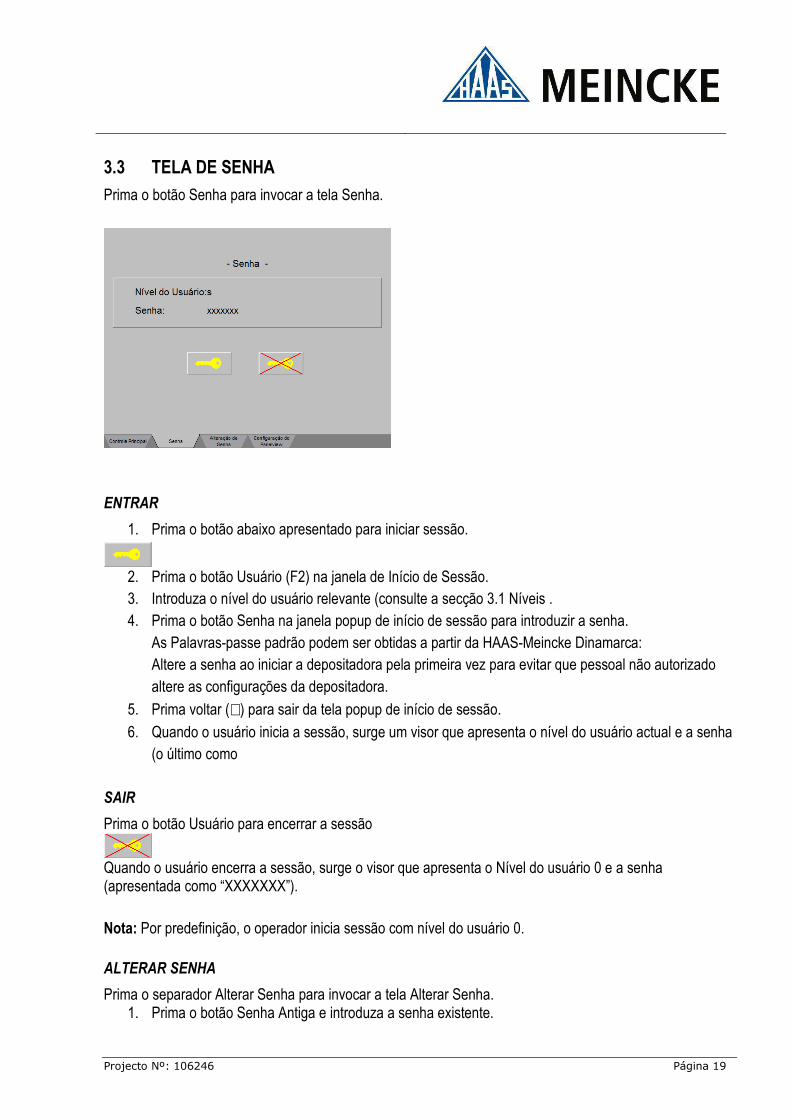
3.3 TELA DE SENHA
Prima o botão Senha para invocar a tela Senha.
ENTRAR
1. Prima o botão abaixo apresentado para iniciar sessão.
2. Prima o botão Usuário (F2) na janela de Início de Sessão. 3. Introduza o nível do usuário relevante (consulte a secção 3.1 Níveis . 4. Prima o botão Senha na janela popup de início de sessão para introduzir a senha.
As Palavras-passe padrão podem ser obtidas a partir da HAAS-Meincke Dinamarca: Altere a senha ao iniciar a depositadora pela primeira vez para evitar que pessoal não autorizado altere as configurações da depositadora.
5. Prima voltar (↵) para sair da tela popup de início de sessão.
6. Quando o usuário inicia a sessão, surge um visor que apresenta o nível do usuário actual e a senha (o último como
SAIR
Prima o botão Usuário para encerrar a sessão
Quando o usuário encerra a sessão, surge o visor que apresenta o Nível do usuário 0 e a senha (apresentada como “XXXXXXX”).
Nota: Por predefinição, o operador inicia sessão com nível do usuário 0.
ALTERAR SENHA
Prima o separador Alterar Senha para invocar a tela Alterar Senha. 1. Prima o botão Senha Antiga e introduza a senha existente.

Página 20 Projecto Nº.: 106246
2. Prima o botão Senha Nova e introduza a senha nova. 3. Prima o botão Confirmar Senha e introduza novamente a senha nova.
4. Prima Voltar (↵) para voltar à tela Senha.
CONFIGURAÇÃO DO PANELVIEW
Prima a folha Configuração do Panelview. O programa Panelview será encerrado e a configuração do Panelview será iniciada. Nota: Esta operação está reservada a usuários de nível 2 ou superior e deve ser efectuada com especial cuidado.
Configuração de Comunicações Prima os seguintes botões para aceder à tela de configuração das comunicações: Configurações de Terminal [F4] – Redes e Comunicações – Ligações de Rede – Adaptadores de Rede – Endereço IP. Predefinições: “Usar DHCP” = Não Consulte o capítulo 3. para o endereço IP.
Protecção de Tela Prima os seguintes botões para aceder à tela de alteração da configuração de protecção de tela: Configurações de Terminal [F4] – Visor – Protecção de Tela. As predefinições são 10 % e 30 minutos.
Activar Cursor Prima os seguintes botões para aceder à tela Activar Cursor para Tela. Configurações de Terminal [F4] – Visor – Cursor. A predefinição é OFF (desligado).
3.3.1 RECEITA ACTUAL
Receita Actual apresenta a receita carregada actualmente no painel de operação.
Projecto Nº: 106246 Página 21
3.3.2 INFORMAÇÕES DA MÁQUINA
Informações da máquina apresenta mensagens informativas relativas à depositadora. As mensagens podem surgir em seis cores distintas, conforme a importância da mensagem para o operador:
Amarelo: A depositadora está pronta e não é necessária qualquer acção do operador.
Verde: A depositadora está a funcionar e não é necessária qualquer acção do operador.
Turquesa: A depositadora está em modo especial e não é necessária qualquer acção do
operador.
Violeta: Informações acerca do manuseio de receitas e não é necessária qualquer acção do
operador.
Laranja: A depositadora não está a funcionar conforme esperado e é necessária a acção do
operador.
Vermelho: Erro da máquina e é necessária a acção do operador.
Informações da Máquina pode conter diversas mensagens informativas activas simultaneamente. Todas as mensagens informativas activas são colocadas numa memória intermédia circular que apresenta cada mensagem informativa da Máquina X seg. de cada vez. O tempo entre a apresentação de informações da Máquina é determinado pelo número de informações da máquina activas, de acordo com o seguinte: Duas informações activas => 1 segundo. Três informações activas => 0,83 segundos. Quatro informações activas => 0,63 segundos. Cinco ou mais informações activas => 0,5 segundos.
3.3.3 USUÁRIO
Usuário actual apresenta o nível do usuário do usuário com sessão iniciada actualmente. Para mais informações acerca dos níveis do usuário, consulte o capítulo 3.1 Níveis .

Página 22 Projecto Nº.: 106246
3.3.4 BOTÃO DE ALARME
A tela Alarmes activos aparece quando o botão de alarme é premido:
Rec. Alarm Este botão reconhece e reinicia um alarme seleccionado (realçado). Se estiverem activados mais do que um alarme, o alarme seguinte será seleccionado na tela, depois de o anterior ter sido reconhecido. Reiniciar falha Este botão reconhece e reinicia todos os alarmes activos.
Para cima
Realçar alarme anterior
Realçar alarme seguinte
Para baixo

Projecto Nº: 106246 Página 23
Desact. Aviso Activar/desactivar o aviso quando o alarme ocorre. Duração aviso Introduza a duração do aviso quando um alarme ocorrer em Segundos.

Página 24 Projecto Nº.: 106246
3.4 RECEITA
A depositadora pode conter até 100 receitas cujo nome tem números que vão de 1 a 100. O menu Receita divide as receitas em cinco painéis secundários: de Receita 1-20 a Receita 81-100. A imagem de tela acima mostra quando o painel secundário de Receita 1-20 é seleccionado. É permitido a usuários de nível 1 ou superior seleccionar todos os painéis secundários do menu Receita. Não é permitido a usuários de nível 0 seleccionar os painéis secundários Guardar Receita, Copiar Receita ou Eliminar Receita.
Projecto Nº: 106246 Página 25
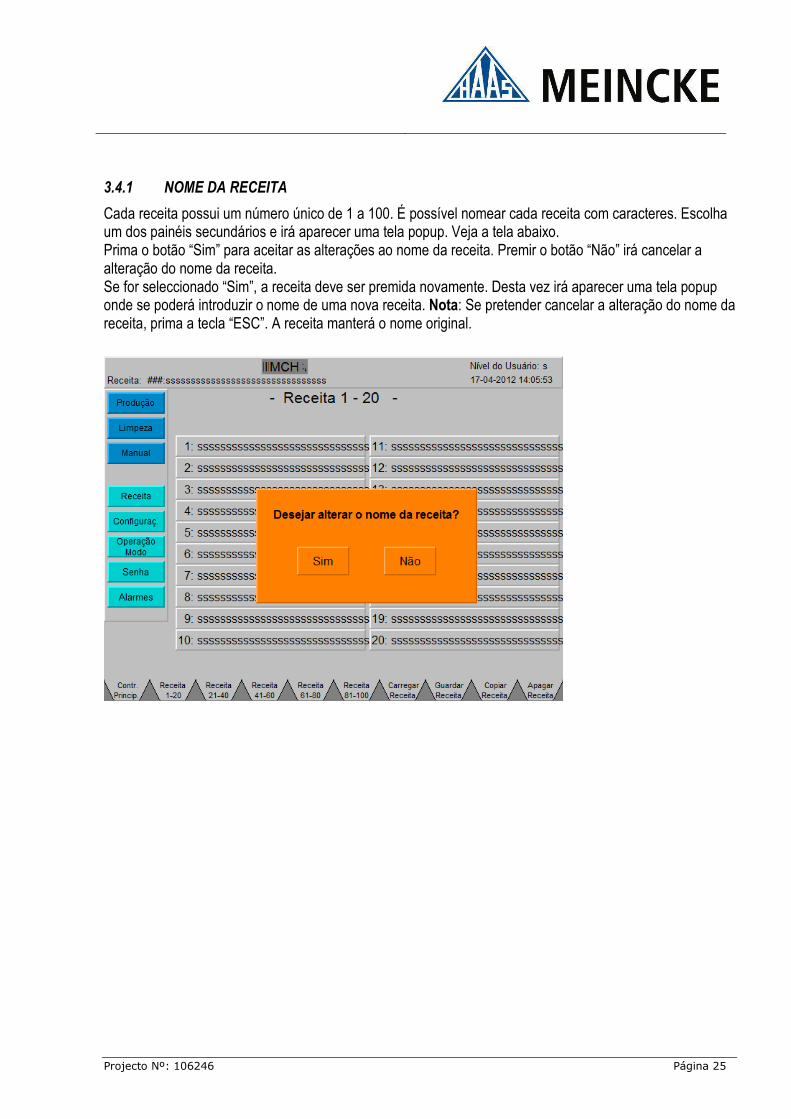
3.4.1 NOME DA RECEITA
Cada receita possui um número único de 1 a 100. É possível nomear cada receita com caracteres. Escolha um dos painéis secundários e irá aparecer uma tela popup. Veja a tela abaixo. Prima o botão “Sim” para aceitar as alterações ao nome da receita. Premir o botão “Não” irá cancelar a alteração do nome da receita. Se for seleccionado “Sim”, a receita deve ser premida novamente. Desta vez irá aparecer uma tela popup onde se poderá introduzir o nome de uma nova receita. Nota: Se pretender cancelar a alteração do nome da receita, prima a tecla “ESC”. A receita manterá o nome original.
Página 26 Projecto Nº.: 106246
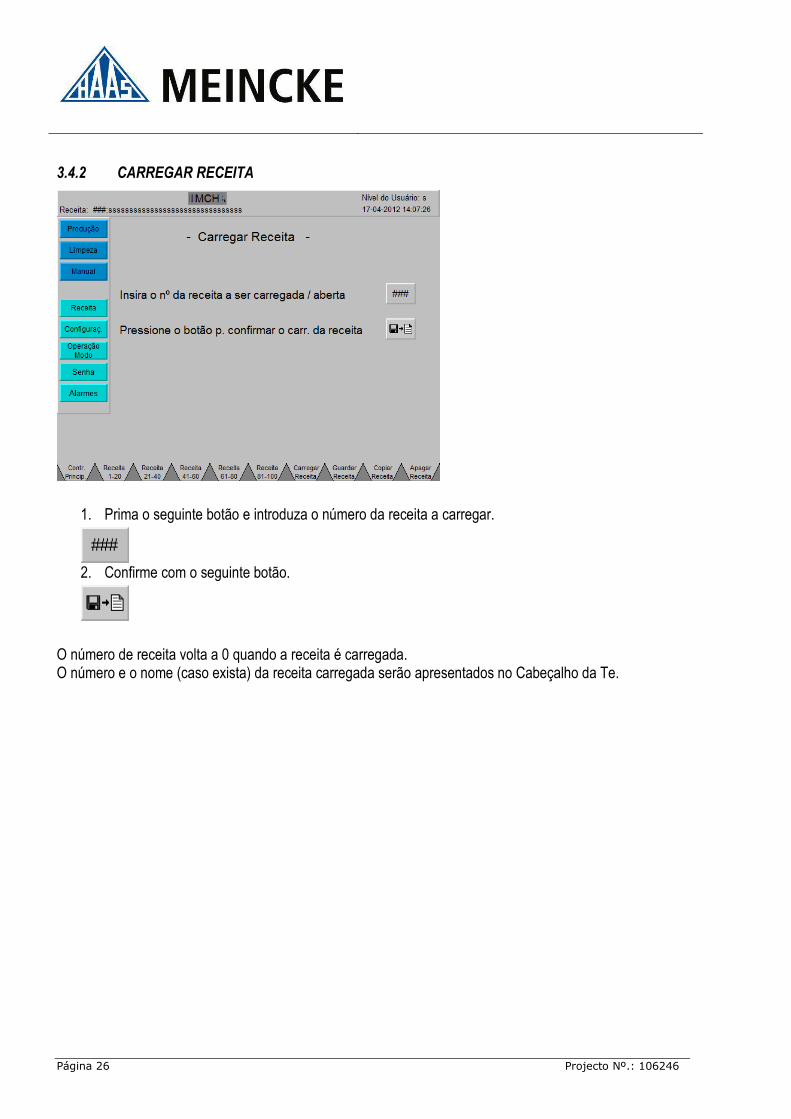
3.4.2 CARREGAR RECEITA
1. Prima o seguinte botão e introduza o número da receita a carregar.
2. Confirme com o seguinte botão.
O número de receita volta a 0 quando a receita é carregada. O número e o nome (caso exista) da receita carregada serão apresentados no Cabeçalho da Te.

Projecto Nº: 106246 Página 27
3.4.3 GUARDAR RECEITA
1. Prima o seguinte botão e introduza o número da receita a guardar.
2. Confirme com o seguinte botão.
Nota: O número da receita volta a 0 quando a receita é guardada.
Página 28 Projecto Nº.: 106246
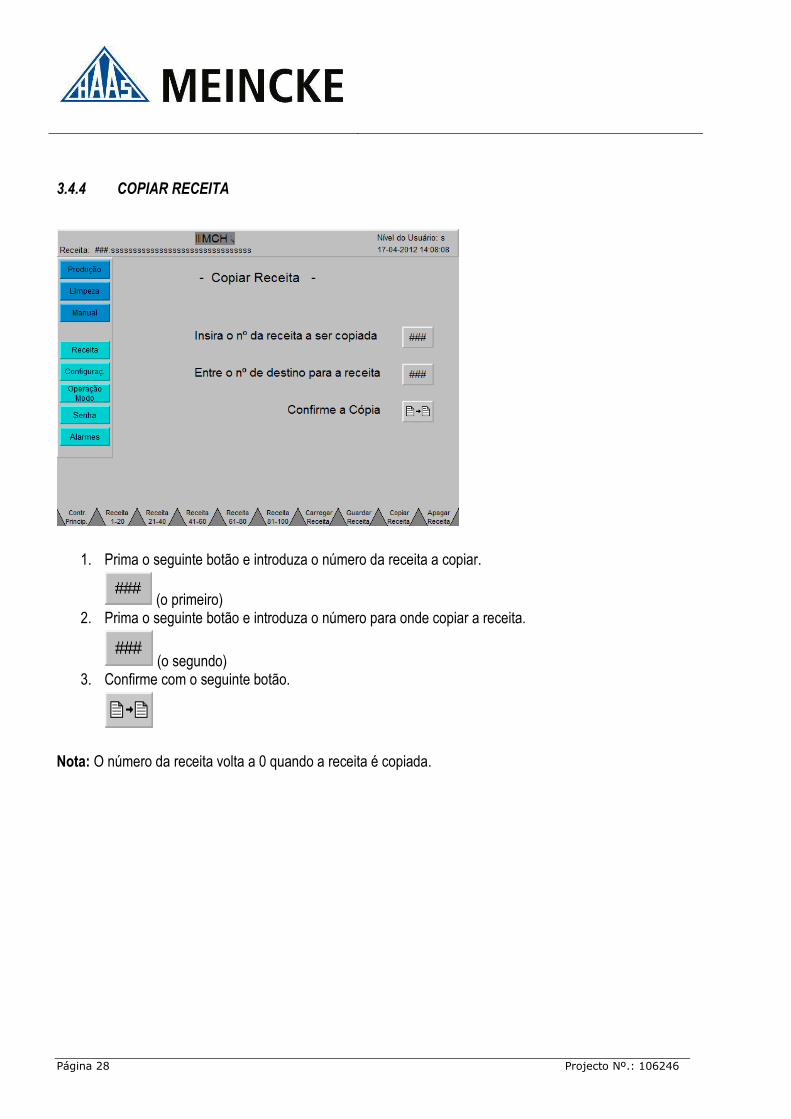
3.4.4 COPIAR RECEITA
1. Prima o seguinte botão e introduza o número da receita a copiar.
(o primeiro) 2. Prima o seguinte botão e introduza o número para onde copiar a receita.
(o segundo) 3. Confirme com o seguinte botão.
Nota: O número da receita volta a 0 quando a receita é copiada.
Projecto Nº: 106246 Página 29
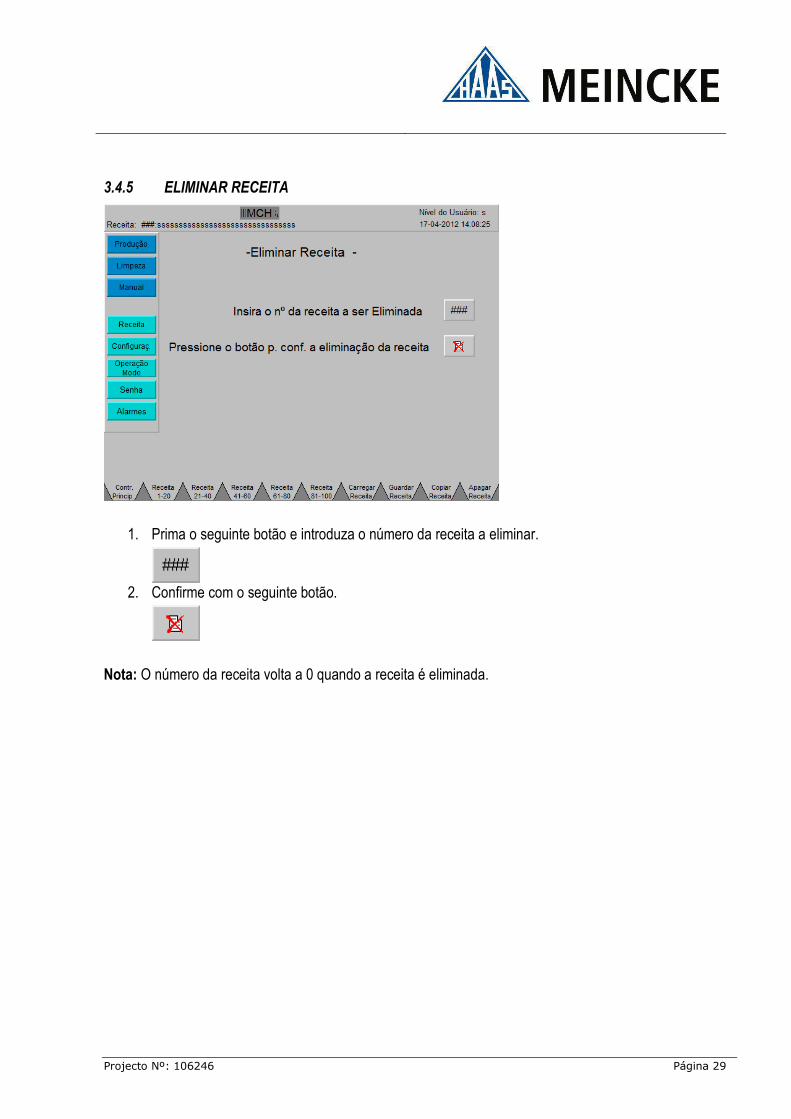
3.4.5 ELIMINAR RECEITA
1. Prima o seguinte botão e introduza o número da receita a eliminar.
2. Confirme com o seguinte botão.
Nota: O número da receita volta a 0 quando a receita é eliminada.
Página 30 Projecto Nº.: 106246
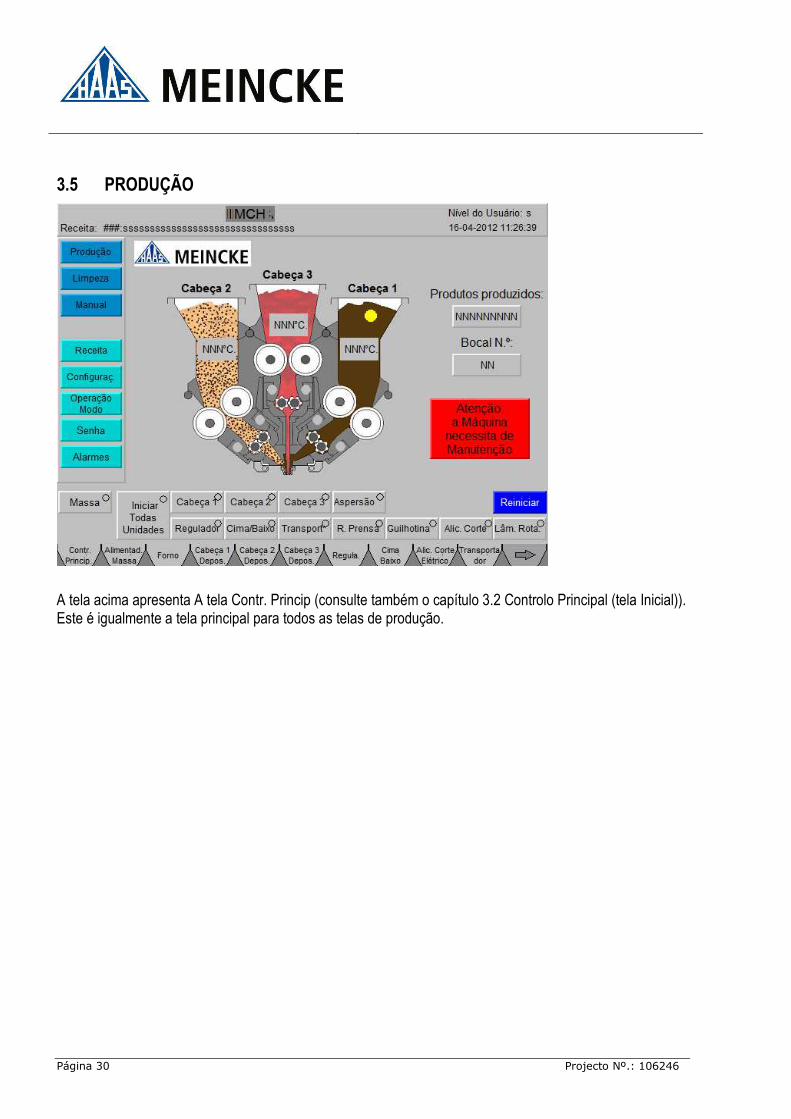
3.5 PRODUÇÃO
A tela acima apresenta A tela Contr. Princip (consulte também o capítulo 3.2 Controlo Principal (tela Inicial)). Este é igualmente a tela principal para todos as telas de produção.

Projecto Nº: 106246 Página 31
3.5.1 LIMPAR A TELA TÁCTIL
Prima o logótipo da DFE Meincke na tela de controlo Principal e será apresentada a seguinte tela:
Não será possível operar a depositadora durante dez segundos, ainda que a mesma seja parada com um botão de parada de emergência. Durante esse período, a tela pode ser limpo com um pano húmido. Um contador na tela efectuará uma contagem decrescente de 10 a 0 segundos e, em seguida, voltará automaticamente à tela Controlo Principal.

Página 32 Projecto Nº.: 106246
3.5.2 A MÁQUINA PRECISA DE MANUTENÇÃO
Se o contador do trabalho de Manutenção (consulte o capítulo 3.9.3 Manutenção) for inferior a zero, surgirá a seguinte mensagem.
Esta mensagem não afecta a operação da depositadora. Quando a mensagem surgir, contacte o departamento de manutenção.
3.5.3 DATA E HORA
A data e a hora actuais são apresentadas na tela e alteram automaticamente para o horário de verão. A data e a hora locais podem ser configuradas no menu Configurações da Máquina (painel secundário Configurações). Consulte o capítulo 3.8 Configurações.
3.5.4 PRODUTOS PRODUZIDOS
A depositadora pode contar o número de produtos produzidos com base no número de bocais introduzidos. Prima o botão Produtos produzidos para reiniciar e visualizar a contagem de produtos durante a produção. Prima o botão Bocal Nº para introduzir o número de bocais na cabeça de depósito. Esta configuração deve ser efectuada sempre que o número de bocais for alterado.
Projecto Nº: 106246 Página 33
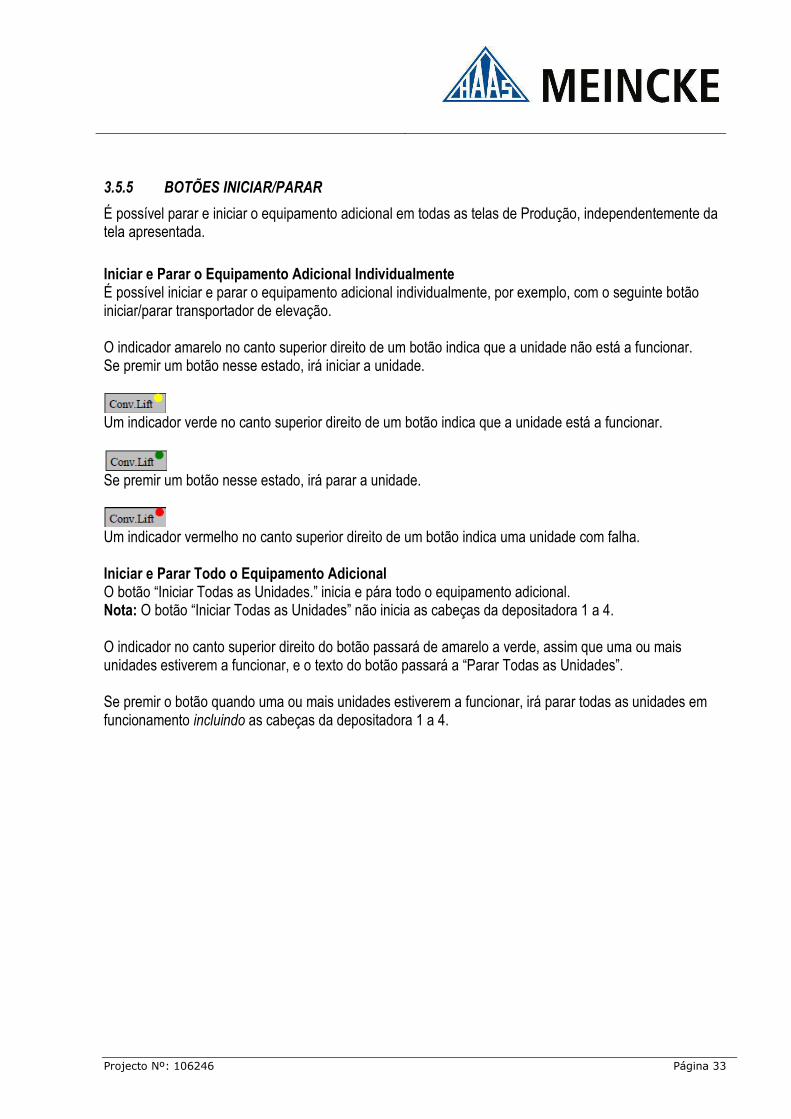
3.5.5 BOTÕES INICIAR/PARAR
É possível parar e iniciar o equipamento adicional em todas as telas de Produção, independentemente da tela apresentada.
Iniciar e Parar o Equipamento Adicional Individualmente É possível iniciar e parar o equipamento adicional individualmente, por exemplo, com o seguinte botão iniciar/parar transportador de elevação. O indicador amarelo no canto superior direito de um botão indica que a unidade não está a funcionar. Se premir um botão nesse estado, irá iniciar a unidade.
Um indicador verde no canto superior direito de um botão indica que a unidade está a funcionar.
Se premir um botão nesse estado, irá parar a unidade.
Um indicador vermelho no canto superior direito de um botão indica uma unidade com falha. Iniciar e Parar Todo o Equipamento Adicional O botão “Iniciar Todas as Unidades.” inicia e pára todo o equipamento adicional. Nota: O botão “Iniciar Todas as Unidades” não inicia as cabeças da depositadora 1 a 4. O indicador no canto superior direito do botão passará de amarelo a verde, assim que uma ou mais unidades estiverem a funcionar, e o texto do botão passará a “Parar Todas as Unidades”. Se premir o botão quando uma ou mais unidades estiverem a funcionar, irá parar todas as unidades em funcionamento incluindo as cabeças da depositadora 1 a 4.

Página 34 Projecto Nº.: 106246
3.6 LIMPEZA
AVISO Risco de lesões do pessoal e danos do equipamento: por motivos de segurança do operador
e de outras pessoas presentes, o menu de limpeza deve ser utilizado durante a limpeza da
depositadora.
No modo de limpeza, a depositadora apenas pode funcionar a uma velocidade limitada (10
por cento da velocidade máxima).
O painel do modo Limpeza da máquina será realçado quando o mesmo for premido e a tela Limpeza for seleccionada. Nota: Não é possível seleccionar o modo Limpeza durante o funcionamento da produção.
Prima o painel secundário do Controlo Principal para sair da tela Limpeza. Ao sair da tela Limpeza, todo o equipamento em funcionamento será automaticamente parado. Para uma descrição mais detalhada acerca da limpeza do equipamento adicional, consulte o capítulo Limpeza no respectivo capítulo principal do equipamento adicional relevante.

Projecto Nº: 106246 Página 35
3.7 MANUAL
O painel de modo Manual da máquina será realçado quando o mesmo for premido e a tela Manual for seleccionada. Nota: Não é possível seleccionar o modo Manual durante o funcionamento da produção. O modo Manual permite a configuração da velocidade de deslocação para cada unidade individualmente. Premir o botão Int. + para uma unidade irá rodar a unidade para a frente (relativamente à rotação da Máquina (consulte o capítulo 4 Máquina e o Termo Máquina), a uma taxa baixa e constante, desde que o botão permaneça premido. A activação dessa função requer a imobilização da Máquina. Premir o botão Int. - para uma unidade irá rodar a unidade para trás (relativamente à rotação da Máquina), a uma taxa baixa e constante, desde que o botão permaneça premido. A activação dessa função requer a imobilização da Máquina. O seguinte campo apresenta a posição actual da unidade, relativamente à posição da Máquina.
Prima o painel secundário do Controlo Principal para sair da tela Manual. Para uma descrição mais detalhada acerca da operação manual do equipamento adicional, consulte o capítulo Manual no respectivo capítulo principal do equipamento adicional relevante.

Página 36 Projecto Nº.: 106246
3.8 CONFIGURAÇÕES
O painel de modo da máquina Configurações será realçado quando o mesmo for premido e a tela configurações for seleccionada.
Na tela Configurações, é possível introduzir as configurações mín./máx. etc. para alguns dos equipamentos adicionais. Seleccione o menu relevante premindo um painel secundário. Nota: Só é permitido a usuários de nível 2 ou superior aceder à tela Configurações. Prima o painel secundário do Controlo Principal para sair da tela Configurações. Para uma descrição mais detalhada acerca da alteração das configurações para o equipamento adicional, consulte o respectivo capítulo para o equipamento adicional relevante.
3.8.1 COMO ALTERAR A DATA E A HORA
Prima um dos botões junto aos textos ano, mês, dia, hora ou minuto para alterar os respectivos valores. Introduza o valor desejado e confirme com o botão alterar.
Projecto Nº: 106246 Página 37
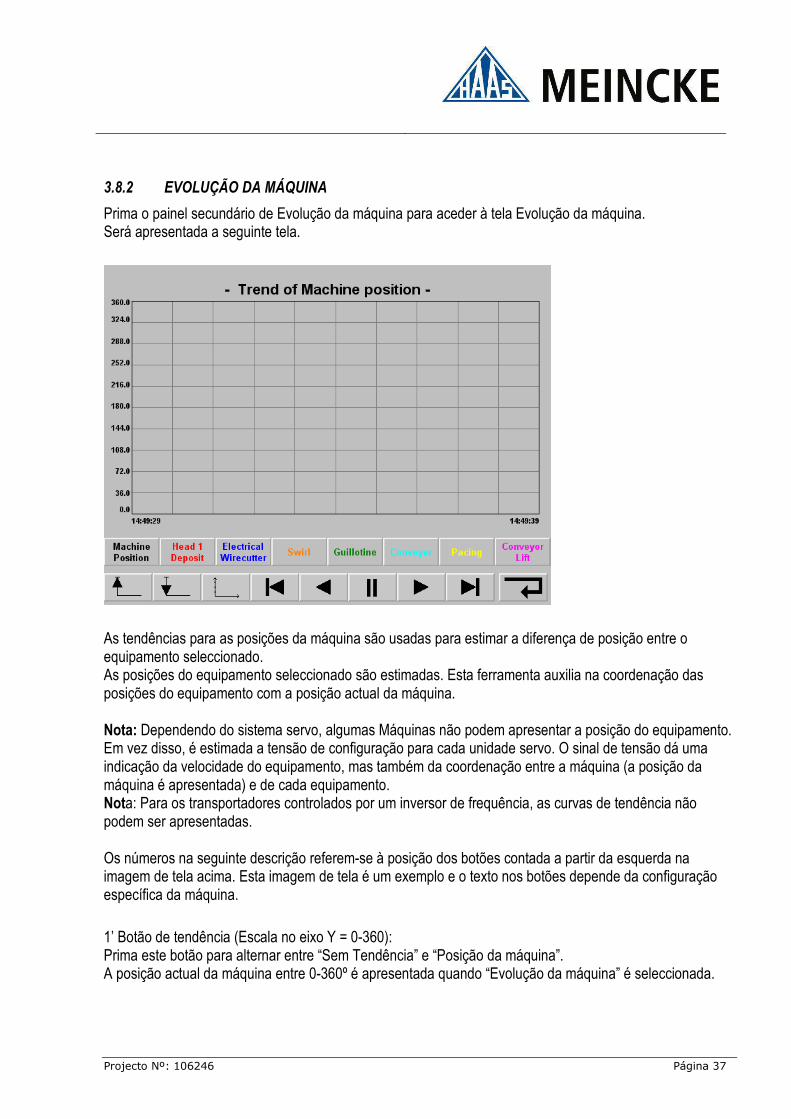
3.8.2 EVOLUÇÃO DA MÁQUINA
Prima o painel secundário de Evolução da máquina para aceder à tela Evolução da máquina. Será apresentada a seguinte tela.
As tendências para as posições da máquina são usadas para estimar a diferença de posição entre o equipamento seleccionado. As posições do equipamento seleccionado são estimadas. Esta ferramenta auxilia na coordenação das posições do equipamento com a posição actual da máquina. Nota: Dependendo do sistema servo, algumas Máquinas não podem apresentar a posição do equipamento. Em vez disso, é estimada a tensão de configuração para cada unidade servo. O sinal de tensão dá uma indicação da velocidade do equipamento, mas também da coordenação entre a máquina (a posição da máquina é apresentada) e de cada equipamento. Nota: Para os transportadores controlados por um inversor de frequência, as curvas de tendência não podem ser apresentadas. Os números na seguinte descrição referem-se à posição dos botões contada a partir da esquerda na imagem de tela acima. Esta imagem de tela é um exemplo e o texto nos botões depende da configuração específica da máquina.
1’ Botão de tendência (Escala no eixo Y = 0-360): Prima este botão para alternar entre “Sem Tendência” e “Posição da máquina”. A posição actual da máquina entre 0-360º é apresentada quando “Evolução da máquina” é seleccionada.

Página 38 Projecto Nº.: 106246
2’ a 5’ Botões de tendência (Escala no eixo Y = 0-360): Premir um destes botões torna possível alternar entre “Sem Tendência” e um dos equipamentos. A gama de posição vai de 0 a 360. 6’ Botão de tendência (Escala no eixo Y = 0-7000): Premir este botão torna possível alternar entre “Sem Tendência” e um dos equipamentos. A gama de posição vai de 0 a 7000. Esta tendência é feita para apresentar a posição do transportador. 7’ a 8’ Botões de tendência (Escala no eixo Y = 0-100): Premir um destes botões torna possível alternar entre “Sem Tendência” e um dos equipamentos. A gama de posição vai de 0 a 100. Esta tendência é feita para apresentar a posição do trasportador de elevação ou a posição do Regulador.
Se premir os botões acima, irá deslocar (para cima ou para baixo) a escala da Unidade no eixo Y. Utilize os botões se a tendência apresentada se mover fora da tela Tendência.
Prima o botão para alternar entre as unidades e a escala do eixo Y 5.
Prima o botão para mover a visualização da tendência para o momento em que a tendência teve início ou em que a respectiva sessão foi iniciada.
Prima o botão para retroceder a visualização da tendência uma tela de cada vez.
Prima o botão para parar e reiniciar a apresentação da tendência.
Prima o botão para avançar a visualização da tendência uma tela de cada vez.
Prima o botão para mover a visualização da tendência para a última visualização gravada.
Prima este painel secundário para sair da tela Evolução da máquina.
Projecto Nº: 106246 Página 39
3.8.3 BACKUP DAS RECEITAS
Prima o painel secundário do Backup das Receitas para aceder à tela para Backup das Receitas. Será apresentada a seguinte tela. A partir desta tela, é possível guardar todas as receitas num cartão de memória localizado no PLC. Para além disso, é possível restaurar todas as receitas do PLC. Esta funcionalidade pode ser útil se o CPU do PLC for trocado por outro CPU.
Prima este botão para fazer um backup de todas as receitas. O backup das receitas demorará até cinco minutos e é indicado pela seguinte barra de progresso. Não saia desta tela antes de concluir o backup.
Prima este botão para restaurar todas as receitas. O restauro das receitas demorará até cinco minutos e é indicado pela seguinte barra de progresso. Não saia desta tela antes de concluir o restauro.
Prima este painel secundário para sair da tela Backup das Receitas.
Página 40 Projecto Nº.: 106246
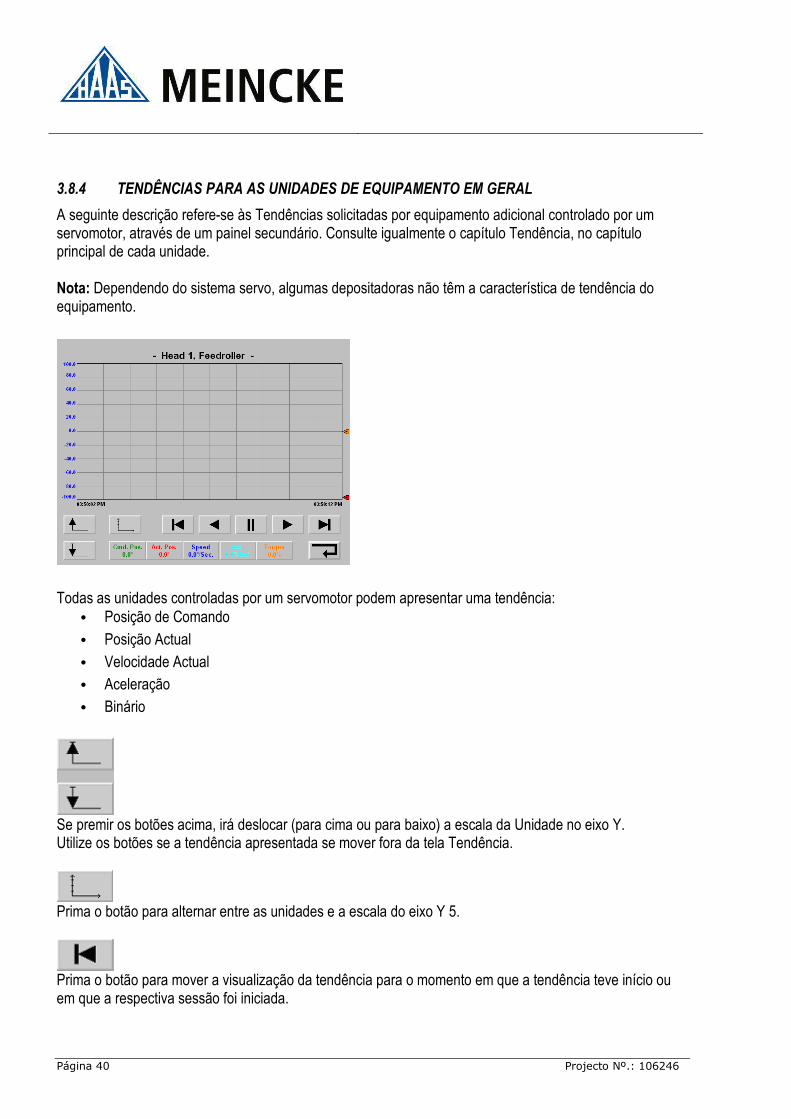
3.8.4 TENDÊNCIAS PARA AS UNIDADES DE EQUIPAMENTO EM GERAL
A seguinte descrição refere-se às Tendências solicitadas por equipamento adicional controlado por um servomotor, através de um painel secundário. Consulte igualmente o capítulo Tendência, no capítulo principal de cada unidade. Nota: Dependendo do sistema servo, algumas depositadoras não têm a característica de tendência do equipamento.
Todas as unidades controladas por um servomotor podem apresentar uma tendência: • Posição de Comando
• Posição Actual
• Velocidade Actual
• Aceleração
• Binário
Se premir os botões acima, irá deslocar (para cima ou para baixo) a escala da Unidade no eixo Y. Utilize os botões se a tendência apresentada se mover fora da tela Tendência.
Prima o botão para alternar entre as unidades e a escala do eixo Y 5.
Prima o botão para mover a visualização da tendência para o momento em que a tendência teve início ou em que a respectiva sessão foi iniciada.
Projecto Nº: 106246 Página 41
Prima o botão para retroceder a visualização da tendência uma tela de cada vez.
Prima o botão para parar e reiniciar a apresentação da tendência.
Prima o botão para avançar a visualização da tendência uma tela de cada vez.
Prima o botão para mover a visualização da tendência para a última visualização gravada.
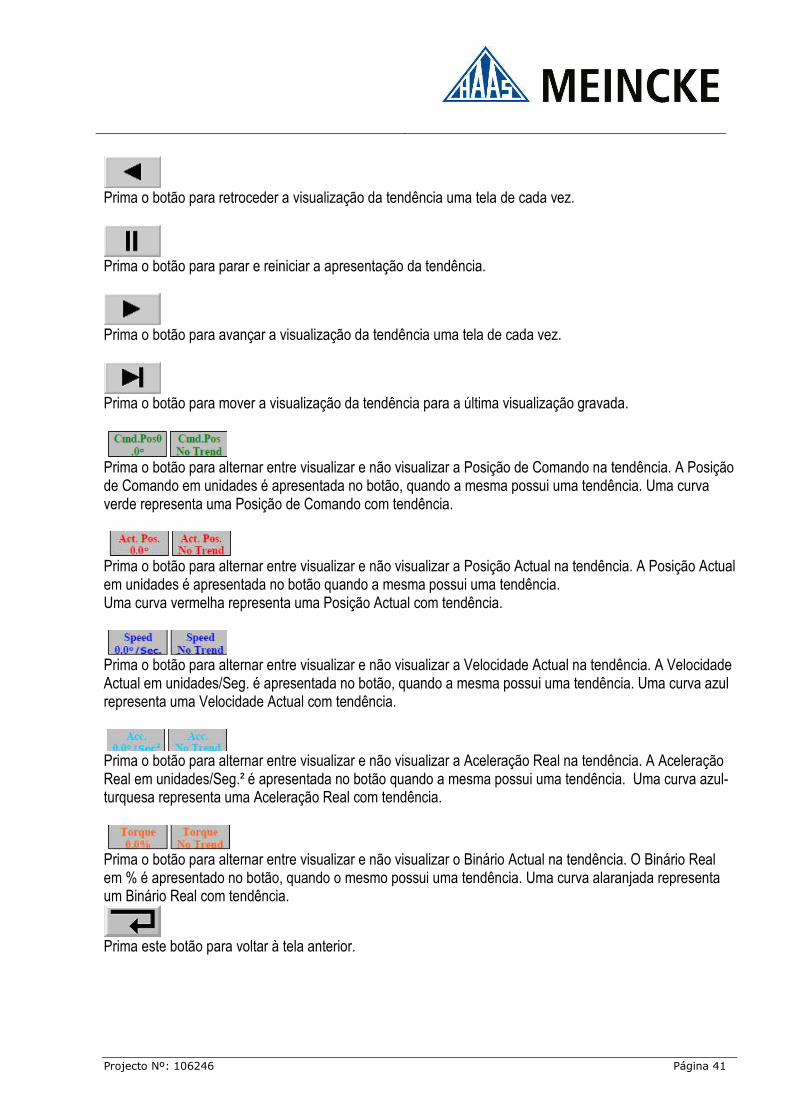
Prima o botão para alternar entre visualizar e não visualizar a Posição de Comando na tendência. A Posição de Comando em unidades é apresentada no botão, quando a mesma possui uma tendência. Uma curva verde representa uma Posição de Comando com tendência.
Prima o botão para alternar entre visualizar e não visualizar a Posição Actual na tendência. A Posição Actual em unidades é apresentada no botão quando a mesma possui uma tendência. Uma curva vermelha representa uma Posição Actual com tendência.
Prima o botão para alternar entre visualizar e não visualizar a Velocidade Actual na tendência. A Velocidade Actual em unidades/Seg. é apresentada no botão, quando a mesma possui uma tendência. Uma curva azul representa uma Velocidade Actual com tendência.
Prima o botão para alternar entre visualizar e não visualizar a Aceleração Real na tendência. A Aceleração Real em unidades/Seg.² é apresentada no botão quando a mesma possui uma tendência. Uma curva azul-turquesa representa uma Aceleração Real com tendência.
Prima o botão para alternar entre visualizar e não visualizar o Binário Actual na tendência. O Binário Real em % é apresentado no botão, quando o mesmo possui uma tendência. Uma curva alaranjada representa um Binário Real com tendência.
Prima este botão para voltar à tela anterior.

Página 42 Projecto Nº.: 106246
3.9 MODO DE OPERAÇÃO (PAINEL DE MODO DA MÁQUINA)
O painel de modo da máquina de Modo de Operação será realçado quando o mesmo for premido e a tela Modo Operação for seleccionada. O Modo de Operação possui três painéis secundários:
• Modo de Operação: Selecção do modo de operação para as várias unidades.
• Selecção de Idioma: Selecção entre os idiomas opcionais.
• Manutenção: Contador de manutenção para lembretes de manutenção para cada unidade.
3.9.1 MODO DE OPERAÇÃO (PAINEL SECUNDÁRIO)
Os painéis secundários do Modo de Operação permitem alterar o modo da unidade. É aberto um menu secundário para cada unidade quando um dos botões é premido. Os modos de unidades possíveis para cada uma das unidades são descritos nos capítulos principais para as mesmas.
Nota: • O modo de operação só pode ser alterado quando a máquina não estiver em funcionamento.
• Activar/desactivar o equipamento adicional provocará a reinicialização do sistema servo. Tal demorará entre 30 e 120 segundos. Durante a reinicialização, é apresentado o número XX do texto informativo da Máquina.
• As receitas contêm um modo de operação. Carregar uma nova receita causará, portanto, a reinicialização do sistema servo.
• Só é permitido a usuários de nível 2 ou superior aceder à tela Modo de Operação.
Projecto Nº: 106246 Página 43
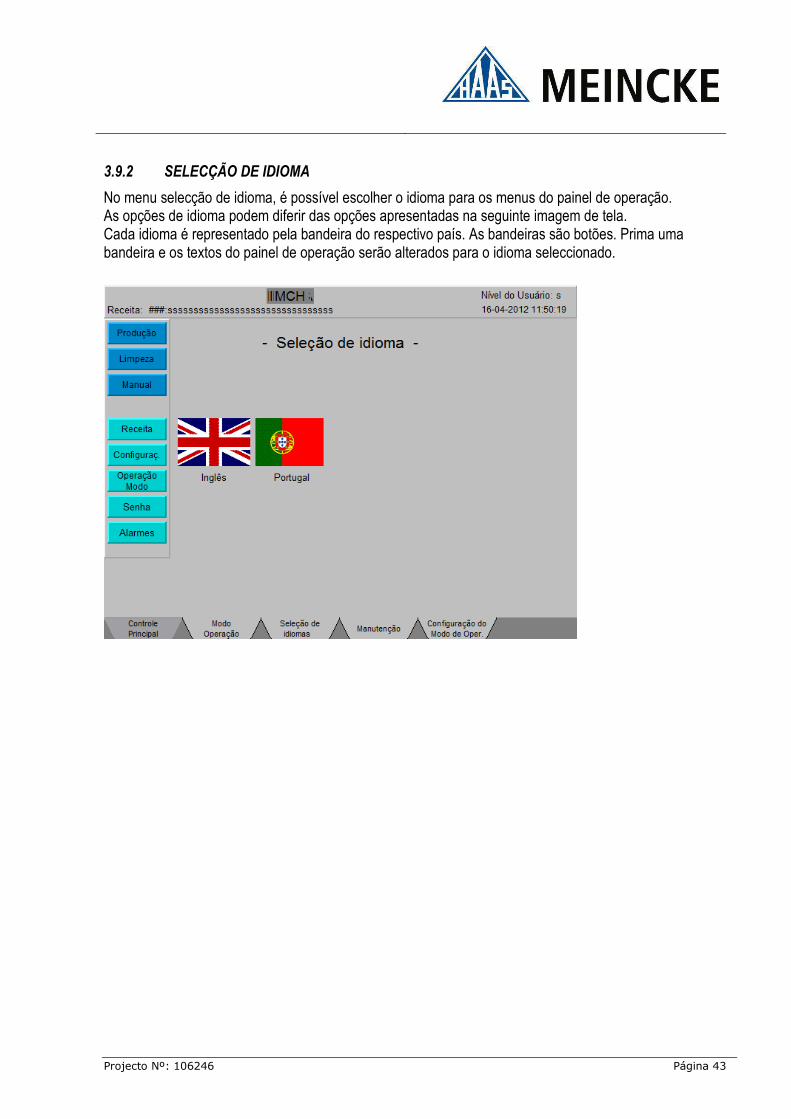
3.9.2 SELECÇÃO DE IDIOMA
No menu selecção de idioma, é possível escolher o idioma para os menus do painel de operação. As opções de idioma podem diferir das opções apresentadas na seguinte imagem de tela. Cada idioma é representado pela bandeira do respectivo país. As bandeiras são botões. Prima uma bandeira e os textos do painel de operação serão alterados para o idioma seleccionado.

Página 44 Projecto Nº.: 106246
3.9.3 MANUTENÇÃO
Para facilitar a manutenção da depositadora, encontra-se a funcionar um programa de manutenção em background (em segundo plano). Quando a Máquina está em funcionamento, contadores para vários trabalhos de manutenção efectuam a contagem decrescente até aos pontos de predefinição 0. Quando o contador passa abaixo de 0, surge uma mensagem popup na tela Controlo Principal. A tela popup só desaparece quando todos os trabalhos de manutenção abaixo de 0 forem reiniciados.
Alterar o Intervalo de Trabalho de Manutenção Localize o trabalho de manutenção cujo intervalo deseja alterar. Prima o botão cinzento claro que apresenta o valor do contador predefinido e introduza o intervalo de tempo desejado para o trabalho de manutenção.
Reiniciar um Trabalho de Manutenção Localize o trabalho de manutenção que deseja reiniciar. Prima o botão azul que apresenta o valor real do contador. Será apresentada a seguinte tela popup. Prima “sim” para confirmar que o trabalho de manutenção foi efectuado. O contador de manutenção é então configurado para o valor do contador predefinido.
Projecto Nº: 106246 Página 45
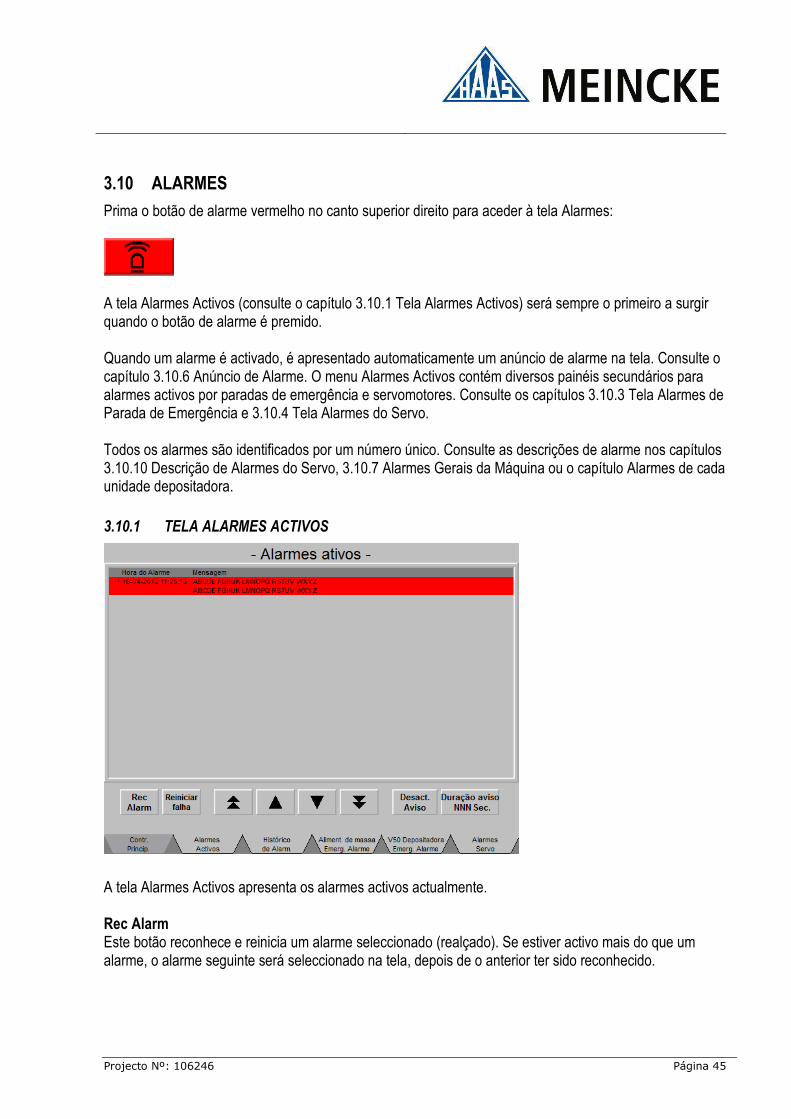
3.10 ALARMES
Prima o botão de alarme vermelho no canto superior direito para aceder à tela Alarmes:
A tela Alarmes Activos (consulte o capítulo 3.10.1 Tela Alarmes Activos) será sempre o primeiro a surgir quando o botão de alarme é premido. Quando um alarme é activado, é apresentado automaticamente um anúncio de alarme na tela. Consulte o capítulo 3.10.6 Anúncio de Alarme. O menu Alarmes Activos contém diversos painéis secundários para alarmes activos por paradas de emergência e servomotores. Consulte os capítulos 3.10.3 Tela Alarmes de Parada de Emergência e 3.10.4 Tela Alarmes do Servo. Todos os alarmes são identificados por um número único. Consulte as descrições de alarme nos capítulos 3.10.10 Descrição de Alarmes do Servo, 3.10.7 Alarmes Gerais da Máquina ou o capítulo Alarmes de cada unidade depositadora.
3.10.1 TELA ALARMES ACTIVOS
A tela Alarmes Activos apresenta os alarmes activos actualmente. Rec Alarm Este botão reconhece e reinicia um alarme seleccionado (realçado). Se estiver activo mais do que um alarme, o alarme seguinte será seleccionado na tela, depois de o anterior ter sido reconhecido.

Página 46 Projecto Nº.: 106246
Reiniciar falha Este botão reconhece e reinicia todos os alarmes activos.
Para cima
Realçar alarme anterior
Realçar alarme seguinte
Para baixo Desact. Aviso Activar/desactivar o aviso quando o alarme ocorre. Duração aviso Introduza a duração o aviso quando um alarme ocorrer em Segundos.
Projecto Nº: 106246 Página 47
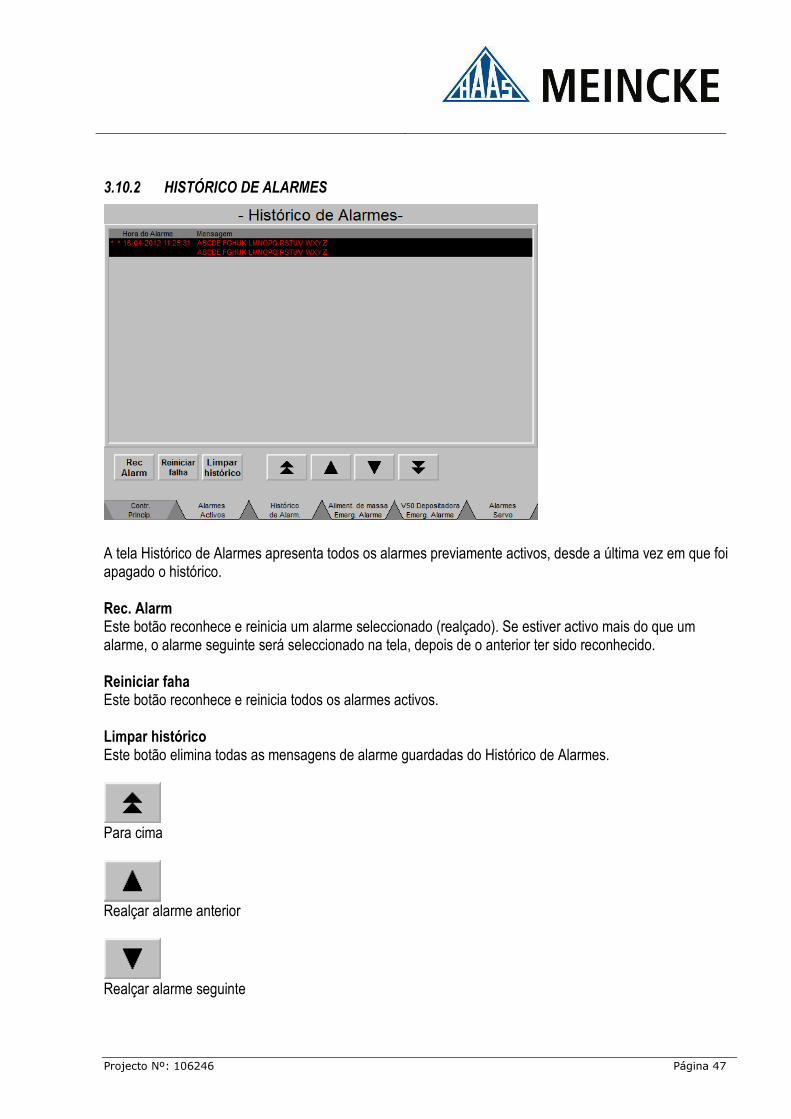
3.10.2 HISTÓRICO DE ALARMES
A tela Histórico de Alarmes apresenta todos os alarmes previamente activos, desde a última vez em que foi apagado o histórico. Rec. Alarm Este botão reconhece e reinicia um alarme seleccionado (realçado). Se estiver activo mais do que um alarme, o alarme seguinte será seleccionado na tela, depois de o anterior ter sido reconhecido. Reiniciar faha Este botão reconhece e reinicia todos os alarmes activos. Limpar histórico Este botão elimina todas as mensagens de alarme guardadas do Histórico de Alarmes.
Para cima
Realçar alarme anterior
Realçar alarme seguinte
Página 48 Projecto Nº.: 106246
Para baixo
Projecto Nº: 106246 Página 49
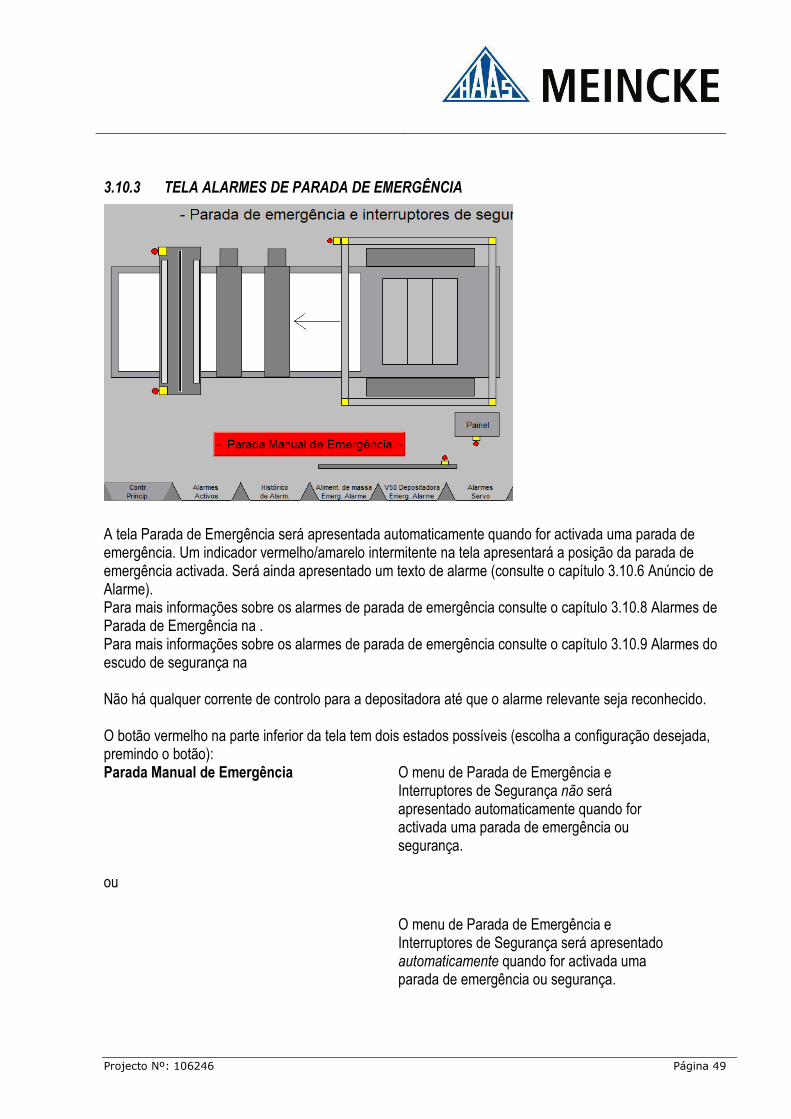
3.10.3 TELA ALARMES DE PARADA DE EMERGÊNCIA
A tela Parada de Emergência será apresentada automaticamente quando for activada uma parada de emergência. Um indicador vermelho/amarelo intermitente na tela apresentará a posição da parada de emergência activada. Será ainda apresentado um texto de alarme (consulte o capítulo 3.10.6 Anúncio de Alarme). Para mais informações sobre os alarmes de parada de emergência consulte o capítulo 3.10.8 Alarmes de Parada de Emergência na . Para mais informações sobre os alarmes de parada de emergência consulte o capítulo 3.10.9 Alarmes do escudo de segurança na Não há qualquer corrente de controlo para a depositadora até que o alarme relevante seja reconhecido. O botão vermelho na parte inferior da tela tem dois estados possíveis (escolha a configuração desejada, premindo o botão): Parada Manual de Emergência O menu de Parada de Emergência e
Interruptores de Segurança não será apresentado automaticamente quando for activada uma parada de emergência ou segurança.
ou
O menu de Parada de Emergência e Interruptores de Segurança será apresentado automaticamente quando for activada uma parada de emergência ou segurança.

Página 50 Projecto Nº.: 106246
3.10.4 TELA ALARMES DO SERVO
A tela Alarmes do Servo apresenta códigos de erro para o sistema servo. Consulte o capítulo 3.10.10 Descrição de Alarmes do Servo para mais informações acerca dos códigos de falha. Nota: Dependendo do sistema servo, algumas depositadoras não têm a característica de alarme do servo.
Quando um alarme do servo é activado, o botão na parte superior da tela passa de cinzento a vermelho. O seguinte exemplo apresenta um alarme com uma falha em “Eixo do Servo do Rolo de Alimentação na Cabeça Depositadora 1”.
Este botão apresenta o eixo com falha. Tocar no botão irá alternar entre todos os eixos com falha, caso exista mais de um.
No caso de um alarme do servo, serão apresentados um ou mais textos de tela intermitentes entre cinzento e vermelho. No exemplo anterior, existe uma falha de erro de posição.
Se ocorrer uma falha no módulo do Sercos no quadro CLX, será apresentado um código de erro.
Projecto Nº: 106246 Página 51
Se ocorrer uma falha do Sercos, será apresentado um código de erro.
O texto anterior apresenta o estado actual do anel Sercos. Fase -1: Detecção de transmissão automática Fase 0: Iniciar Anel Sercos Fase 1: Iniciar Comunicações Fase 2: Validar Nós Fase 3: Configurar Nós Fase 4: Modo de Funcionamento
Página 52 Projecto Nº.: 106246
3.10.5 DIAGNÓSTICO DO PAINEL
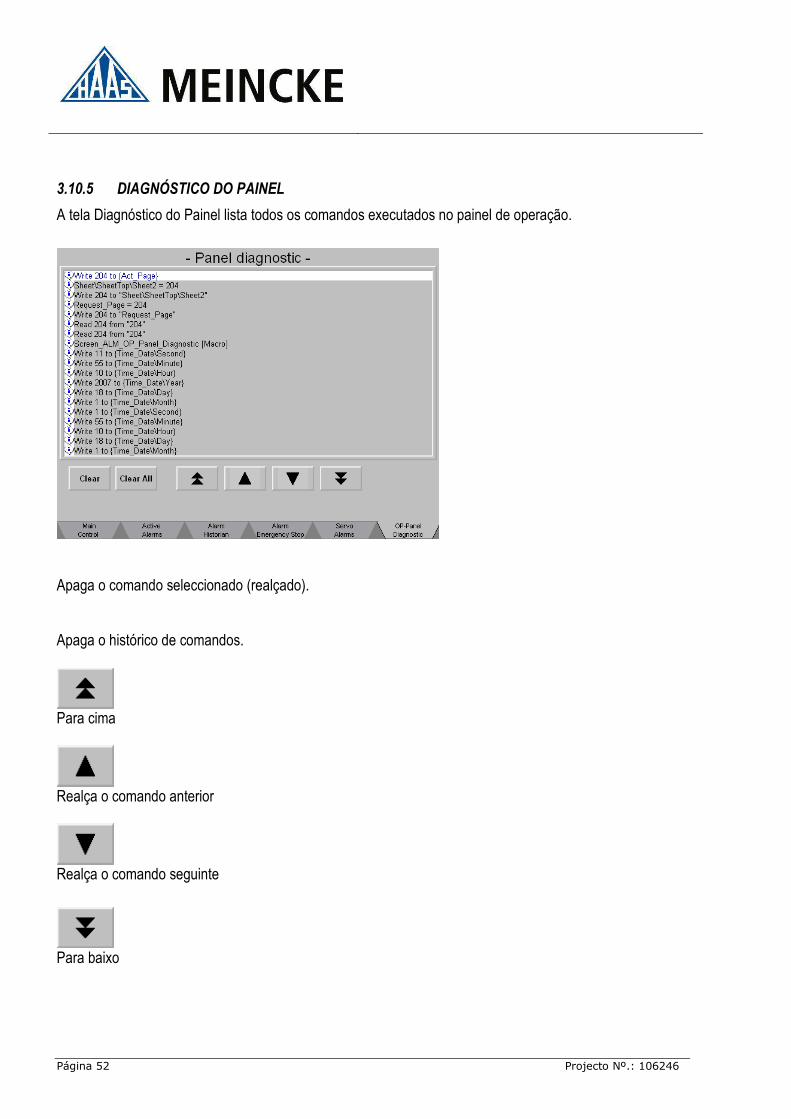
A tela Diagnóstico do Painel lista todos os comandos executados no painel de operação.
Apaga o comando seleccionado (realçado). Apaga o histórico de comandos.
Para cima
Realça o comando anterior
Realça o comando seguinte
Para baixo

Projecto Nº: 106246 Página 53
3.10.6 ANÚNCIO DE ALARME
Quando um alarme é activado, surge na tela um anúncio de alarme popup que apresenta o último alarme activado. A seguinte imagem é um exemplo de um anúncio de alarme.
Rec Alarm Este botão reconhece e reinicia todos os alarmes activos. Reiniciar falha Este botão reconhece e reinicia o alarme apresentado. Caso se encontre activo mais de um alarme, o seguinte será apresentado no Anúncio de Alarme.
Este botão fecha a tela de anúncio de alarme. Os alarmes não reconhecidos permanecerão activos. Se um alarme for provocado por um interruptor de segurança ou uma parada de emergência, o menu Parada de Emergência e Interruptores de Segurança é apresentado automaticamente (caso a apresentação automática não tenha sido desactivada). Consulte o capítulo 3.10.3 Tela Alarmes de Parada de Emergência.
Página 54 Projecto Nº.: 106246
3.10.7 ALARMES GERAIS DA MÁQUINA
Seguidamente, são descritos os alarmes da depositadora, com referências aos códigos de alarme tal como são apresentados no anúncio de alarme (consulte o capítulo 3.10.6 Anúncio de Alarme). Os alarmes relativos ao equipamento adicional são descritos no capítulo Alarmes para o respectivo equipamento adicional.
Alarme 1: Controlo de voltagem em falta. Acção: Active o Controlo de voltagem. Alarme 2: O disjuntor da corrente principal para o módulo servo Kinetix 1 desengatou. Acção: Verifique o disjuntor da corrente principal para o módulo servo Kinetix 1 e reinicie. Alarme 3: O disjuntor da corrente de controlo para o módulo servo Kinetix 1 desengatou. Acção: Verifique o disjuntor da corrente de controlo para o módulo servo Kinetix 1 e reinicie. Alarme 4: O disjuntor da corrente principal para o módulo servo Kinetix 2 desengatou. Acção: Verifique o disjuntor da corrente principal para o módulo servo Kinetix 2 e reinicie. Alarme 5: O disjuntor da corrente de controlo para o módulo servo Kinetix 2 desengatou. Acção: Verifique o disjuntor da corrente de controlo para o módulo servo Kinetix 2 e reinicie. Alarme 6: O disjuntor da corrente principal para o módulo servo Kinetix 3 desengatou. Acção: Verifique o disjuntor da corrente principal para o módulo servo Kinetix 3 e reinicie. Alarme 7: O disjuntor da corrente de controlo para o módulo servo Kinetix 3 desengatou. Acção: Verifique o disjuntor da corrente de controlo para o módulo servo Kinetix 3 e reinicie. Alarme 8: O disjuntor da corrente principal para o módulo servo Ultra 3000 desengatou. Acção: Verifique o disjuntor da corrente principal para o módulo servo Ultra 3000 e reinicie.

Projecto Nº: 106246 Página 55
Alarme 9: O disjuntor da corrente de controlo para o módulo servo Ultra 3000 desengatou. Acção: Verifique o disjuntor da corrente de controlo para o módulo servo Ultra 3000 e reinicie. Alarme 10 Falha no anel Sercos Acção: Verifique a fibra do anel Sercos. Alarme 11 Controlador do Servo CC-Bus em falta na prateleira. Acção: Verifique o disjuntor da corrente principal para o módulo servo. Alarme 12 Falha na inicialização do módulo servo. Acção: Desligue a alimentação durante 45 seg. Alarme 13 A bateria PLC está 95 % descarregada. Acção: Troque a Bateria PLC agora. Alarme 14 Erro DH+. Acção: Verifique o cabo de comunicação. Alarme 15 A pressão de ar está baixa. Acção: Verifique o fornecimento de ar.
Página 56 Projecto Nº.: 106246
3.10.8 ALARMES DE PARADA DE EMERGÊNCIA NA DEPOSITADORA
Seguidamente, são descritos os alarmes da depositadora, com referências aos códigos de alarme tal como são apresentados no anúncio de alarme (consulte o capítulo 3.10.6 Anúncio de Alarme). Consulte também o capítulo 3.10.3 Tela Alarmes de Parada de Emergência Alarme 33 O botão de parada de emergência no painel de controlo não foi libertado. Acção: Liberte o botão de parada de emergência e pressione o botão de reinício azul. Alarme 34 Botão de parada de emergência na Admissão do Local de Operação da Depositadora. Acção: Liberte o botão de parada de emergência e pressione o botão de reinício azul. Alarme 35 Botão de parada de emergência na Exaustão do Local de Operação da Depositadora. Acção: Liberte o botão de parada de emergência e pressione o botão de reinício azul. Alarme 36 Botão de parada de emergência na Admissão no Local Traseiro da Depositadora. Acção: Liberte o botão de parada de emergência e pressione o botão de reinício azul. Alarme 37 Botão de parada de emergência na Exaustão no Local Traseiro da Depositadora. Acção: Liberte o botão de parada de emergência e pressione o botão de reinício azul. Alarme 38 Botão de parada de emergência no Local de Operação da Guilhotina. Acção: Liberte o botão de parada de emergência e pressione o botão de reinício azul. Alarme 39 Botão de parada de emergência no Local Traseiro da Guilhotina. Acção: Liberte o botão de parada de emergência e prima o botão azul de reinicialização. Alarme 40 Botão de parada de emergência no Local de Operação do Transportador. Acção: Liberte o botão de parada de emergência e pressione o botão de reinício azul.

Projecto Nº: 106246 Página 57
Alarme 41 Botão de parada de emergência no Local Traseiro do Transportador. Acção: Liberte o botão de parada de emergência e pressione o botão de reinício azul. Alarme 42 Botão de parada de emergência no Gabinete de Energia. Acção: Liberte o botão de parada de emergência e pressione o botão de reinício azul. Alarme 43 Botão de parada de emergência no lado de operação. Acção: Liberte o botão de parada de emergência e pressione o botão de reinício azul. Alarme 44 Botão de parada de emergência no lado traseiro. Acção: Liberte o botão de parada de emergência e pressione o botão de reinício azul. Alarme 48 O botão de parada de emergência ou interruptor de segurança não foi libertado. Acção: Liberte o botão de parada de emergência e pressione o botão de reinício azul.
3.10.9 ALARMES DO ESCUDO DE SEGURANÇA NA DEPOSITADORA
Seguidamente, são descritos os alarmes da depositadora, com referências aos códigos de alarme tal como são apresentados no anúncio de alarme (consulte o capítulo 3.10.6 Anúncio de Alarme). Consulte também o capítulo 3.10.3 Tela Alarmes de Parada de Emergência. Alarme 65 Porta de segurança no local de operação está aberta. Acção: Feche a porta e prima o botão azul de reinicialização. Alarme 66 Porta de segurança na parte traseira está aberta. Acção: Feche a porta e prima o botão azul de reinicialização. Alarme 67 Escudo de segurança no local de operação está aberto. Acção: Feche o escudo e prima o botão azul de reinicialização.
Página 58 Projecto Nº.: 106246
Alarme 68 Escudo de segurança na parte de trás está aberto. Acção: Feche o escudo e prima o botão azul de reinicialização. Alarme 69 Escudo de segurança na Admissão do Rolo de Alimentação da Depositadora está aberto. Acção: Feche o escudo e prima o botão azul de reinicialização. Alarme 70 Escudo de segurança na Exaustão do Rolo de Alimentação da Depositadora está aberto. Acção: Feche o escudo e prima o botão azul de reinicialização. Alarme 71 Protecção do escudo de segurança no Funil 1 da Depositadora está aberta. Acção: Feche o escudo e prima o botão azul de reinicialização. Alarme 72 Protecção do escudo de segurança no Funil 2 da Depositadora está aberta. Acção: Feche o escudo e prima o botão azul de reinicialização. Alarme 73 Protecção do escudo de segurança no Funil 3 da Depositadora está aberta. Acção: Feche o escudo e prima o botão azul de reinicialização. Alarme 74 Protecção do escudo de segurança na admissão da guilhotina está aberta. Acção: Feche o escudo e prima o botão azul de reinicialização. Alarme 75 Protecção do escudo de segurança na exaustão da guilhotina está aberta. Acção: Feche o escudo e prima o botão azul de reinicialização. Alarme 76 Cortina de luz de segurança no local de operação está aberta. Acção: Remova o objecto da cortina de luz de segurança e prima o botão azul de reinicialização.
Projecto Nº: 106246 Página 59
Alarme 77 Cortina de luz de segurança na parte de trás está aberta. Acção: Remova o objecto da cortina de luz de segurança e prima o botão azul de reinicialização.
3.10.10 DESCRIÇÃO DE ALARMES DO SERVO
Nota: Dependendo do sistema servo, algumas depositadoras não podem apresentar os alarmes do servo. Este capítulo inclui uma descrição de todos os alarmes do servo (consulte igualmente o capítulo 3.10.4 Tela Alarmes do Servo). Positive Software Overtravel Fault_1 PosSoftOvertravelFault Configurado quando o eixo se deslocou, ou tentou deslocar-se, para além do valor configurado actualmente para a Trajectória Positiva Máxima. Apagado quando o eixo é deslocado novamente para dentro do limite da trajectória. Negative Software Overtravel Fault_2 NegSoftOvertravelFault Configurado quando o eixo se deslocou, ou tentou deslocar-se, para além do valor configurado actualmente para a Trajectória Negativa Máxima. Apagado quando o eixo é deslocado novamente para dentro do limite da trajectória. Positive Hardware Overtravel Fault_3 PosHardOvertravelFault Configurado quando o eixo se deslocou para além dos limites de posição de direcção positiva actuais, conforme estabelecido pelos interruptores de limite de hardware instalados na depositadora. Para o respectivo restabelecimento, o eixo deve ser deslocado novamente para dentro dos limites de operação normais da depositadora, sendo o interruptor de limite reiniciado. Essa condição de falha é bloqueada e requer a execução de uma instrução MAFR (Reiniciar Falha do Eixo de Movimento) ou MASR (Reiniciar Encerramento do Eixo de Movimento) para ser apagada. Negative Hardware Overtravel Fault_4 NegHardOvertravelFault Configurado quando o eixo se deslocou para além dos limites de posição de direcção negativa actuais, conforme estabelecido pelos interruptores de limite de hardware instalados na depositadora. Para o respectivo restabelecimento, o eixo deve ser deslocado novamente para dentro dos limites de operação normais da depositadora, sendo o interruptor de limite reiniciado. Essa condição de falha é bloqueada e requer a execução de uma instrução MAFR (Reiniciar Falha do Eixo de Movimento) ou MASR (Reiniciar Encerramento do Eixo de Movimento) para ser apagada. Feedback Fault_5 MotFeedbackFault Configurado para uma fonte de feedback específica, no caso de uma das seguintes condições: Os sinais eléctricos do diferencial para um ou mais dos canais de feedback (por exemplo, A+ e A-, B+ e B- ou Z+ e Z-) encontram-se no mesmo nível (ambos elevados ou ambos baixos). Em condições de operação normal, os sinais do diferencial encontram-se sempre em níveis opostos. A causa mais comum dessa situação é um fio quebrado entre o transdutor de feedback e o accionador ou módulo servo ou Perda de "potência" de feedback ou ligação eléctrica "comum" de feedback entre o accionador ou o módulo servo e o dispositivo de feedback. Essa condição de falha é bloqueada e requer a execução de uma instrução
Página 60 Projecto Nº.: 106246
MAFR (Reiniciar Falha do Eixo de Movimento) ou MASR (Reiniciar Encerramento do Eixo de Movimento) para ser apagada. Feedback Noise Fault_6 MotFeedbackNoiseFault Configurado para uma fonte de feedback específica quando o módulo do servo tiver detectado transições simultâneas dos canais de feedback A e B (designado por "ruído de feedback"). Normalmente, o ruído de feedback é provocado pela perda de quadratura no próprio dispositivo de feedback ou pela captura de sinais de ruído de modo normal radiados por parte da cablagem do dispositivo de feedback, sendo possível observar ambos com um osciloscópio. Essa condição de falha é bloqueada e requer a execução de uma instrução MAFR (Reiniciar Falha do Eixo de Movimento) ou MASR (Reiniciar Encerramento do Eixo de Movimento) para ser apagada. Auxiliary Feedback Fault_7 AuxFeedbackFault Configurado para uma fonte de feedback específica, no caso de uma das seguintes condições: os sinais eléctricos do diferencial para um ou mais dos canais de feedback (por exemplo, A+ e A-, B+ e B- ou Z+ e Z-) encontram-se no mesmo nível (ambos elevados ou ambos baixos). Em condições de operação normal, os sinais do diferencial encontram-se sempre em níveis opostos. A causa mais comum dessa situação é um fio quebrado entre o transdutor de feedback e o accionador ou módulo servo ou Perda de "potência" de feedback ou ligação eléctrica "comum" de feedback entre o accionador ou o módulo servo e o dispositivo de feedback. Essa condição de falha é bloqueada e requer a execução de uma instrução MAFR (Reiniciar Falha do Eixo de Movimento) ou MASR (Reiniciar Encerramento do Eixo de Movimento) para ser apagada. Auxiliary Feedback Noise Fault_8 AuxFeedbackNoiseFault Configurado para uma fonte de feedback auxiliar quando o módulo do servo tiver detectado transições simultâneas dos canais de feedback A e B (designado por "ruído de feedback"). Normalmente, o ruído de feedback é provocado pela perda de quadratura no próprio dispositivo de feedback ou pela captura de sinais de ruído de modo normal radiados por parte da cablagem do dispositivo de feedback, sendo possível observar ambos com um osciloscópio. Essa condição de falha é bloqueada e requer a execução de uma instrução MAFR (Reiniciar Falha do Eixo de Movimento) ou MASR (Reiniciar Encerramento do Eixo de Movimento) para ser apagada. condições ocorrem: Os sinais eléctricos do diferencial para um ou mais dos canais de feedback (por exemplo, A+ e A-, B+ e B- ou Z+ e Z-) encontram-se no mesmo nível (ambos elevados ou ambos baixos). Em condições de operação normal, os sinais do diferencial encontram-se sempre em níveis opostos. A causa mais comum dessa situação é um fio quebrado entre o transdutor de feedback e o accionador ou módulo servo ou Perda de "potência" de feedback ou ligação eléctrica "comum" de feedback entre o accionador ou o módulo servo e o dispositivo de feedback. Essa condição de falha é bloqueada e requer a execução de uma instrução MAFR (Reiniciar Falha do Eixo de Movimento) ou MASR (Reiniciar Encerramento do Eixo de Movimento) para ser apagada. Ground Short Fault_14 Configure uma fonte auxiliar de feedback no caso de uma das seguintes condições: Os sinais eléctricos do diferencial para um ou mais dos canais de feedback (por exemplo, A+ e A-, B+ e B- ou Z+ e Z-) encontram-se no mesmo nível (ambos elevados ou ambos baixos). Em condições de operação normal, os sinais do diferencial encontram-se sempre em níveis opostos. A causa mais comum dessa situação é um fio quebrado entre o transdutor de feedback e o accionador ou módulo servo ou Perda de "potência" de
Projecto Nº: 106246 Página 61
feedback ou ligação eléctrica "comum" de feedback entre o accionador ou o módulo servo e o dispositivo de feedback. Drive Hard Fault_15 DriveHardFault configurado quando o accionador detecta uma falha grave no hardware. Overspeed Fault_16 OverSpeedFault configurado quando a velocidade do eixo, conforme determinada pelo feedback, tiver excedido o limite de excesso de velocidade normalmente configurado para 150% do limite de velocidade configurado para o motor. Overload Fault_17 OverloadFault configurado quando o limite de carga do motor/accionador tiver sido excedido e assim permanecer. (Este atributo está normalmente associado ao limite IT do accionador.) Drive Overtemp Fault_18 DriveOvertempFault configurado quando a temperatura do accionador excede a temperatura de encerramento do mesmo. Motor Overtemp Fault_19 Motor Overtemp Fault configurado quando o motor apresenta uma temperatura ambiente elevada ou no caso de um erro de cablagem do motor. Drive Cooling Fault_20 DriveCoolingFault configurado quando a temperatura ambiente em volta do circuito de controlo do accionador excede a temperatura ambiente de encerramento do accionador. Drive Control Voltage Fault_21 DriveControlVoltageFault configurado quando as voltagens da fonte de alimentação associada ao circuito do accionador se encontram fora dos limites aceitáveis. Feedback Fault_22 FeedbackFault configurado quando uma das fontes de feedback associadas ao eixo do accionador apresenta um problema que impede que o accionador receba informações de posição fiáveis ou precisas do dispositivo de feedback. Commutation Fault_23 CommutationFault configurado quando a fonte de feedback de comutação associada ao eixo do accionador apresenta um problema que impede que o accionador receba informações do eixo do motor fiáveis ou precisas para efectuar a comutação. Drive Overcurrent Fault_24 DriveOvercurrentFault configurado quando a corrente de saída do accionador excede os limites de operação predefinidos para o accionador.
Página 62 Projecto Nº.: 106246
Drive Overvoltage Fault_25 DriveOvervoltageFault configurado quando a voltagem do bus DC do accionador excede os limites de operação predefinidos para o bus. Drive Undervoltage Fault_26 DriveUndervoltageFault configurado quando a voltagem do bus DC do accionador se encontra abaixo dos limites de operação predefinidos para o bus. Power Phase Loss Fault_27 PowerPhaseLossFault configurado quando o accionador detecta que uma ou mais das três fases da linha de alimentação estão perdidas das entradas de alimentação trifásicas. Position Error Fault_28 PosErrorFault configurado quando o servo tiver detectado que o erro de posição do eixo excedeu o valor configurado actualmente para a Tolerância de Erro de Posição. Essa condição de falha é bloqueada e requer a execução de uma instrução MAFR (Reiniciar Falha do Eixo de Movimento) ou MASR.
3.11 INFORMAÇÕES DA MÁQUINA
As informações de máquinas são textos que são apresentados para ajudar o operador a trabalhar com a máquina. As informações da máquina relativas a equipamento adicional são descritas no capítulo das Informações de máquina para o respectivo equipamento adicional.
3.11.1 INFORMAÇÕES GERAIS DA MÁQUINA
São apresentadas abaixo as informações gerais da máquina que não estão relacionadas com um equipamento específico. Para mais informação sobre as informações de máquina, consulte o capítulo 3.3.2 Informações da Máquina. Pronta para o funcionamento A depositadora está pronta a começar. A velocidade da máquina é /*N:3 {[CLX]MCH_SPD_ROWS_MIN_ACT_R} NOFILL DP:0*/ RPM O modo da máquina está configurado para “Autónomo” e está agora a ser executado. A velocidade actual é apresentada em Fileiras/minuto. Máquina a funcionar como escrava da esteira do forno O modo da máquina está configurado para “escrava da esteira do forno ou escrava da esteira do forno com sensor” e está agora a ser executado. Máquina a funcionar como escrava de outra máquina O modo da máquina está configurado para “escrava de outra máquina” e está agora a ser executado. Modo manual A depositadora está em modo Manual.
Projecto Nº: 106246 Página 63
Modo de limpeza A depositadora está em modo de limpeza. Falha na pressão de ar A pressão de ar é baixa. Não pode ir para esta tela com a Máquina em funcionamento O operador tentou entrar no modo de limpeza ou manual durante a produção. Bloqueio excêntrico na caixa da bomba não bloqueado Um ou mais bloqueios excêntricos na Cabeça Depositadora 1-3 não estão bloqueados. Na tela Principal o excêntrico está bloqueado se forem visualizados os bloqueios de excêntricos activados nas configurações da Cabeça Depositadora. Consulte a secção Bloqueio do Excêntrico na Caixa da Bomba no capítulo da Cabeça Depositadora 1-3 para activar ou desactivar os bloqueios excêntricos. Interruptor de segurança aberto Um ou mais escudos de segurança estão activos. Parada de emergência não libertada Um ou mais botões de parada de emergência estão activados. Voltagem do controlo em falta O transmissor de segurança não está activo. Prima o botão de reinicialização. O Controlo do Servo não está pronto O controlador do servo não está pronto devido a um erro de eixo ou a uma falha de energia. Por favor espere que o anel sercos do servo se reconfigure (Estado X/) A comunicação entre PLC e o accionador do Servo está a ser reconfigurada. Durante a reconfiguração, o estado de configuração é apresentado. Consulte o capítulo 3.10.4 Tela Alarmes do Servo para mais informações. Erro da Rede DH+ Há um erro de comunicação entre o painel de operação e PLC. Usuário actual sem acesso O operador tentou entrar numa tela ou iniciar um equipamento em que um maior nível do usuário é necessário. A velocidade da máquina excedeu o limite máximo A velocidade máxima para a máquina foi excedida. A máquina não está sincronizada A máquina é escrava de outra máquina ou da esteira do forno e não estão sincronizadas.

Página 64 Projecto Nº.: 106246
3.11.2 INFORMAÇÕES DA MÁQUINA RELACIONADAS À GESTÃO DE RECEITAS
Não pode carregar receita com a máquina em funcionamento O operador está a tentar carregar uma receita enquanto um ou mais equipamentos estão em funcionamento. Receita carregada / aberta O sistema está a confirmar que uma nova receita foi carregada e transferida para os dados de produção. Receita guardada O sistema está a confirmar que os dados de produção foram guardados. Receita copiada O sistema está a confirmar que a receita X foi copiada para a receita Y. Receita apagada O sistema está a confirmar que a receita X foi eliminada.
3.11.3 INFORMAÇÕES DA MÁQUINA RELACIONADAS AOS CARTÕES FLASH COMPACTOS
Erro de download para Cartão FC Erro de backup!! Ocorreu um erro durante a transferência de receitas entre a memória PLC e o Cartão Flash Compacto. Erro de envio a partir de um Cartão FC Erro de restauração. Ocorreu um erro durante a transferência de receitas entre o Cartão Flash Compacto e a memória PLC.
Projecto Nº: 106246 Página 65
4 MÁQUINA E O TERMO MÁQUINA O termo Máquina denota um Eixo rotativo virtual a funcionar entre 0 e 360˚. A Máquina é o “master” de todas as unidades (equipamento opcional e cabeças de depósito). A Máquina é automaticamente iniciada quando uma unidade inicia. Quando todas as unidades são paradas, a Máquina pára igualmente. Quando a primeira unidade é iniciada, a Máquina aumenta a actividade lentamente. Todas as unidades funcionam como escravas da máquina, excepto quando o modo de uma unidade estiver configurado para “Contínuo”. A velocidade de rotação e a posição da Máquina constituem a referência para as configurações de operação nas quais as unidades se baseiam. Se todos os restantes factores forem iguais, um aumento da velocidade de rotação da Máquina limita o período de tempo que as unidades possuem para concluir as respectivas operações; a diminuição da velocidade alarga esse período de tempo. Os períodos de início e paragem de operação das unidades são configurados dependendo da posição da Máquina. A posição da Máquina refere-se aos graus de rotação da mesma num determinado momento durante um ciclo da Máquina. A velocidade da Máquina pode ser alterada antes ou durante a produção. O limite mínimo de velocidade é de 10 RPM (Fileiras por Minuto - Rows per Minute). O limite máximo depende das unidades e modos seleccionados. Nota: Dependendo do sistema servo, algumas Máquinas não podem apresentar o equipamento actual. Em vez disso, as unidades de equipamento estão sincronizadas com a posição da máquina usando o impulso zero do equipamento. Ou seja, quando o impulso zero do equipamento é activado durante uma rotação, a posição da máquina é detectada e portanto o desvio é calculado.
Página 66 Projecto Nº.: 106246
4.1 OPERAÇÃO
A máquina possui três modos:
Normalmente, a Máquina funciona como “autónoma”, mas é igualmente possível que actue como escrava de outra máquina. Estão disponíveis duas opções:
• A Máquina actua como escrava de uma esteira do forno (opcional).
• A Máquina actua como escrava de uma esteira do forno e é sincronizada com sensor (opcional).
Os três modos de operação da Máquina são descritos nos capítulos seguintes. Consulte a secção Modo de Operação para uma descrição sobre como alterar o modo de operação.
4.2 MÁQUINA EM GERAL
A seguinte descrição aplica-se a todos os modos de Máquina. Consulte o capítulo Escravo da Esteira do Forno ou Contínuo (Autónomo).
Máquina: Contínua
Máquina: Escrava da Esteira do Forno e sincronizada
com o sensor
Máquina: Escrava da Esteira do Forno
Máquina Não usada
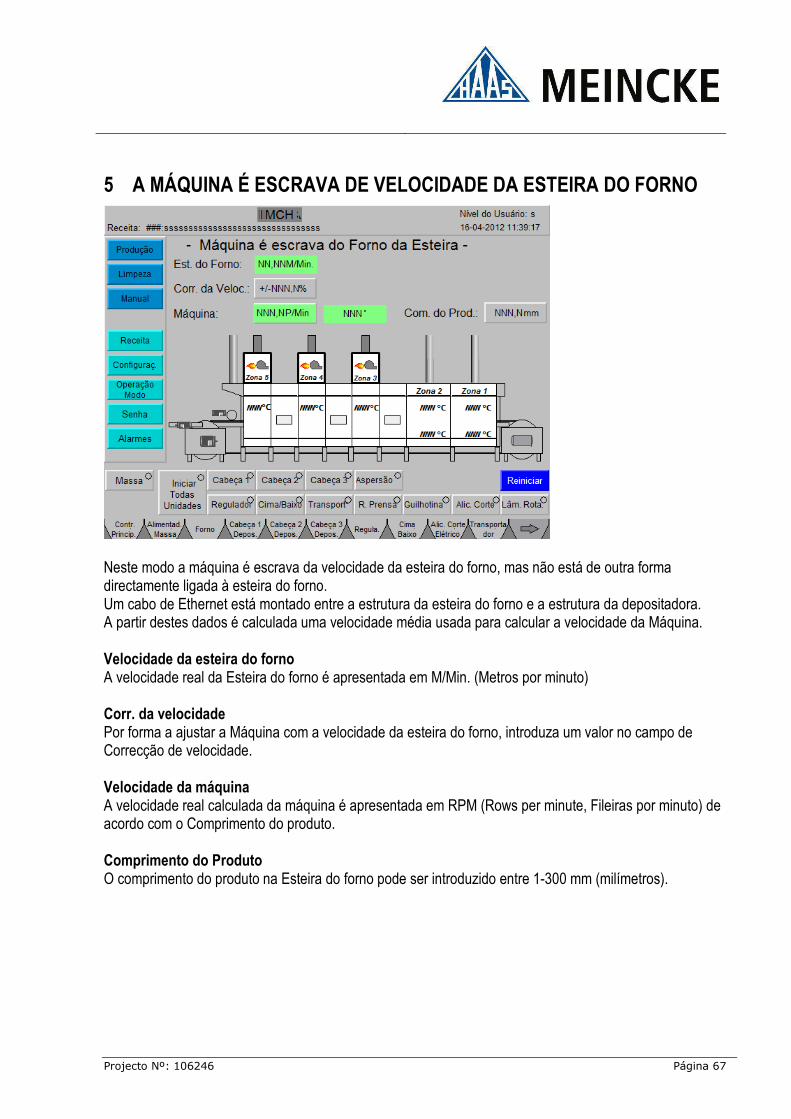
Projecto Nº: 106246 Página 67
5 A MÁQUINA É ESCRAVA DE VELOCIDADE DA ESTEIRA DO FORNO
Neste modo a máquina é escrava da velocidade da esteira do forno, mas não está de outra forma directamente ligada à esteira do forno. Um cabo de Ethernet está montado entre a estrutura da esteira do forno e a estrutura da depositadora. A partir destes dados é calculada uma velocidade média usada para calcular a velocidade da Máquina. Velocidade da esteira do forno A velocidade real da Esteira do forno é apresentada em M/Min. (Metros por minuto) Corr. da velocidade Por forma a ajustar a Máquina com a velocidade da esteira do forno, introduza um valor no campo de Correcção de velocidade. Velocidade da máquina A velocidade real calculada da máquina é apresentada em RPM (Rows per minute, Fileiras por minuto) de acordo com o Comprimento do produto. Comprimento do Produto O comprimento do produto na Esteira do forno pode ser introduzido entre 1-300 mm (milímetros).

Página 68 Projecto Nº.: 106246

Projecto Nº: 106246 Página 69
6 NÍVEL
6.1 PRODUÇÃO
O termo “nível” denota a distância entre a cabeça de depósito e o transportador. A cabeça de depósito pode ser movida para cima e para baixo de forma a colocar os bocais na posição correcta, acima do transportador ou da esteira do forno: O movimento da cabeça de depósito é possível nas seguintes telas:
• Eixo Principal, se disponível
• Regulador (Servo), se disponível
• 1-4 da Cabeça Depositadora, se disponível
• Misturador, se disponível
• Alicate de corte eléctrico, se disponível
• Limpeza, se disponível.
6.2 MOVER A CABEÇA DE DEPOSITADORA PARA CIMA E PARA BAIXO
O ponto de definição pode ser alterado activando o botão de ponto de definição de nível. O ponto de definição é de 0 a 200 mm. (Poderá variar dependendo da forma como a depositadora se encontrar equipada)
O nível da cabeça de depósito pode ser alterado, introduzindo um ponto de definição ou através das teclas de setas. Quando é introduzido um ponto de definição, o botão Mover Nível p/ Ponto de Definição é activado e o nível é automaticamente ajustado ao ponto de definição introduzido. Nota: O comando Mover p/ Ponto de Definição pode ser parado activando novamente o botão Mover p/ Ponto de Definição ou activando uma parada de emergência.
Ao utilizar as teclas de setas, o nível será movido +/- 1 mm para cima ou para baixo e a posição actual será copiada para o ponto de definição.
Apresenta a posição de Nível actual.
NNN.Nm
m
Move Level to Setpoint
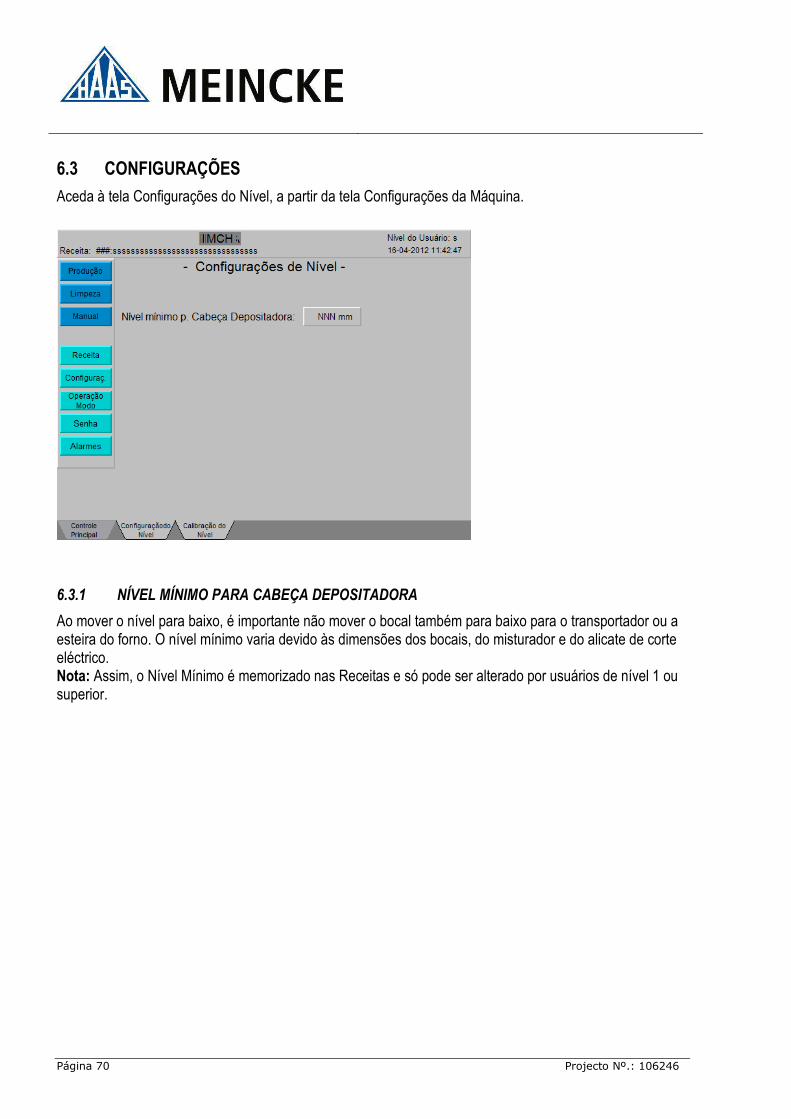
Página 70 Projecto Nº.: 106246
6.3 CONFIGURAÇÕES
Aceda à tela Configurações do Nível, a partir da tela Configurações da Máquina.
6.3.1 NÍVEL MÍNIMO PARA CABEÇA DEPOSITADORA
Ao mover o nível para baixo, é importante não mover o bocal também para baixo para o transportador ou a esteira do forno. O nível mínimo varia devido às dimensões dos bocais, do misturador e do alicate de corte eléctrico. Nota: Assim, o Nível Mínimo é memorizado nas Receitas e só pode ser alterado por usuários de nível 1 ou superior.

Projecto Nº: 106246 Página 71
6.3.2 NÍVEL DE CALIBRAÇÃO
Aceda à tela Nível de Calibração, a partir da tela Configurações do Nível.
Valor Analógico (Mínimo) Introduza a Voltagem mínima [0 a 10000 mV] lida no Valor Analógico Real, quando o Nível se encontrar na posição mínima. Valor Analógico (Máximo) Introduza a Voltagem máxima [0 a 10000 mV] lida no Valor Analógico Real, quando o Nível se encontrar na posição máxima. Valor Físico (Mínimo) Introduza o nível Físico mínimo [0 a 999 mm] quando o Nível se encontrar na posição mínima. Consulte o diagrama de rácio. Valor Físico (Máximo) Introduza o nível Físico máximo [0 a 999 mm] quando o Nível se encontrar na posição máxima. Consulte o diagrama de rácio. Valor Analógico Real O valor real lido no potenciómetro entre 0 e 10000 mV e o valor real calculado em mm.
Página 72 Projecto Nº.: 106246
Interruptor de Limite Mín. Quando o nível se encontra no respectivo mínimo mecânico, o interruptor de limite deve ser activado do estado verde para o vermelho (NC). Interruptor de Limite de 40 mm Quando o nível se encontra no respectivo mínimo mecânico a 40 mm, o interruptor de limite deve encontrar-se no estado verde. Deverá passar a estado vermelho (NC), caso ultrapasse 40 mm. Interruptor de Limite Máx. Quando o nível se encontra no respectivo máximo mecânico, o interruptor de limite deve ser activado do estado verde para o vermelho (NC).
6.3.3 CALIBRAR O NÍVEL
AVISO Estas configurações deverão ser efectuadas apenas por pessoal autorizado.
Nota: Só é permitido a usuários de nível 2 ou superior aceder a esta tela.
Ajuste de Potenciómetros A seguinte explicação descreve a forma de introdução dos valores do potenciómetro no sistema de controlo. A descrição é a mesma para todas as configurações de potenciómetros. Presume-se que o potenciómetro não se encontra ligado à correia dentada.
1. O Nível é movido para a posição mínima. 2. O eixo do potenciómetro é então rodado até que o campo Valor Analógico Real apresente 150 a
200 mV. Seguidamente, a correia dentada é instalada no eixo do potenciómetro. 3. Ajuste o interruptor de limite. Rode o disco de came até que o campo MÍN passe a amarelo. Aperte
o disco de came. 4. Afaste a posição do MÍN e mova-a novamente para o controlo da posição seleccionada. Se a
paragem se encontrar no ponto desejado, o Valor Analógico Real deve ser introduzido no campo Mín.
5. Mova o Nível para a posição máxima. O disco de came é ajustado até que o campo MÁX passe a amarelo e o disco de came seja apertado.
6. Afaste a posição do MÁX e mova-a novamente para o controlo da posição seleccionada. Se a paragem se encontrar no ponto desejado, o Valor Analógico Real deve ser introduzido no campo Máx.
7. Por fim, introduza o valor físico para a posição máx. em mm.
Projecto Nº: 106246 Página 73
6.4 LIMPEZA
O nível pode ainda ser alterado no modo de limpeza. Consulte o capítulo 6.2 Mover a Cabeça de Depositadora para Cima e para Baixo.
6.5 INFORMAÇÕES DA MÁQUINA
Gama de nível de X mm a Y mm (X é o nível mínimo e Y é o “Nível máx. do valor físico”). Estas Informações da Máquina serão apresentadas se o nível actual não se encontrar entre X e Y. Consulte também o capítulo 6.3.1 Nível Mínimo para Cabeça Depositadora.
6.6 ALARMES
Alarme 129 O Disjuntor de Nível desengatou. Acção: Verifique o disjuntor do circuito e reinicie.

Página 74 Projecto Nº.: 106246
Projecto Nº: 106246 Página 75
7 REGULADOR - SERVO “Regulador” é um movimento horizontal, para a frente/para trás da cabeça depositadora por forma a deixá-la seguir o transportador/esteira do forno no seu movimento para a frente. O equipamento Regulador contém dois servomotores; um servo motor de cada lado da cabeça depositadora.
7.1 OPERAÇÃO
A tela da cabeça depositadora em produção depende do modo seleccionado. Todos os modos: Automático, CAM de Cálculo Automático e Projecção Manual de CAM estão listados a seguir e os capítulos seguintes descrevem cada um dos modos. É ainda possível escolher Cabeça Depositadora Não Usada.
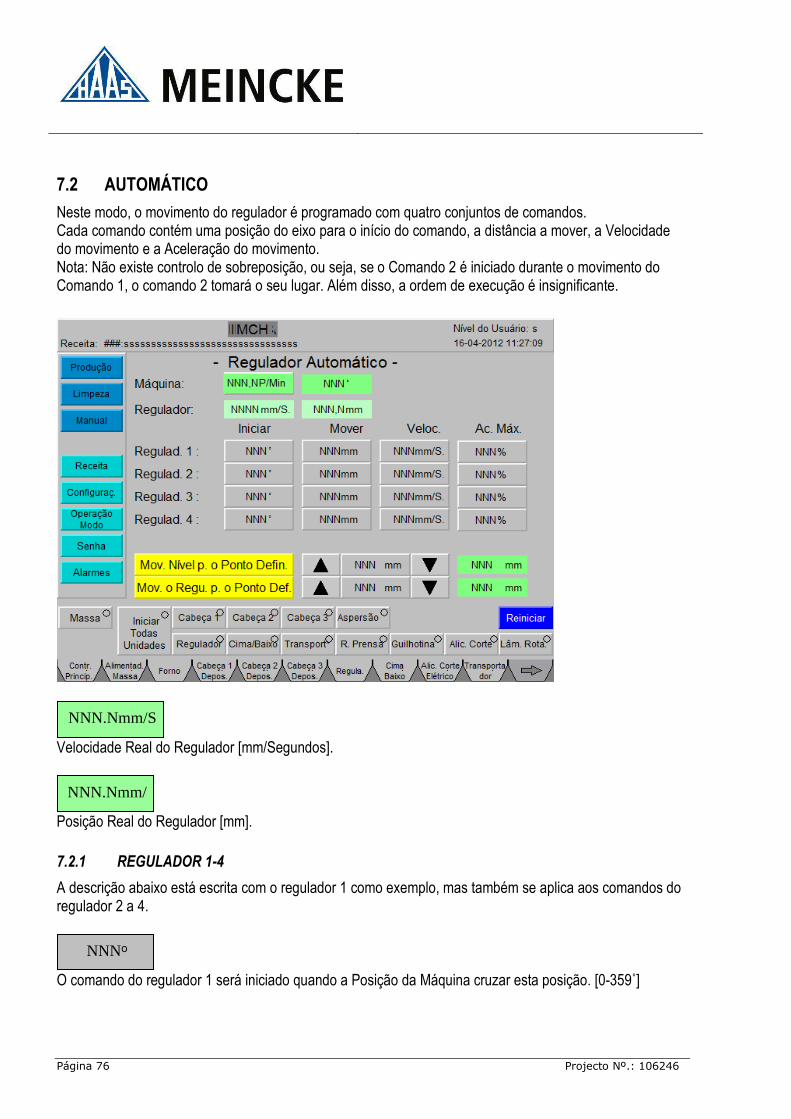
Página 76 Projecto Nº.: 106246
7.2 AUTOMÁTICO
Neste modo, o movimento do regulador é programado com quatro conjuntos de comandos. Cada comando contém uma posição do eixo para o início do comando, a distância a mover, a Velocidade do movimento e a Aceleração do movimento. Nota: Não existe controlo de sobreposição, ou seja, se o Comando 2 é iniciado durante o movimento do Comando 1, o comando 2 tomará o seu lugar. Além disso, a ordem de execução é insignificante.
Velocidade Real do Regulador [mm/Segundos].
Posição Real do Regulador [mm].
7.2.1 REGULADOR 1-4
A descrição abaixo está escrita com o regulador 1 como exemplo, mas também se aplica aos comandos do regulador 2 a 4.
O comando do regulador 1 será iniciado quando a Posição da Máquina cruzar esta posição. [0-359˚]
NNNo
NNN.Nmm/
S
NNN.Nmm/S
Projecto Nº: 106246 Página 77
O comando do regulador moverá a unidade reguladora para a posição introduzida. Podem ser introduzidos valores de 0 a 80 mm. O movimento do regulador pode ser limitado pelo Limite de Movimento Máx. nas Configurações do Regulador.
O comando do regulador moverá a unidade reguladora à velocidade introduzida. Podem ser introduzidos valores de 0 a 400 mm/Seg. A velocidade do regulador pode ser limitada pela Velocidade Máxima nas Configurações do Regulador.
O comando do regulador irá acelerar a unidade reguladora com a aceleração introduzida. Podem ser introduzidos valores de 0 a 100%. A aceleração pode ser limitada pela Aceleração Máx. no Modo Automático nas Configurações do Regulador.
NNN%
NNNmm/S
NNNmm

Página 78 Projecto Nº.: 106246
7.3 CAM DO REGULADOR CALCULADA AUTOMATICAMENTE
Neste modo, o movimento do regulador da cabeça depositadora é controlado por um software CAM que é automaticamente calculado pelo controlador. Regulador A tela abaixo será seleccionada se o painel secundário estiver activado e o Modo de Cálculo de CAM Automático para o Regulador estiver seleccionado no Modo de Operação. Se o botão for premido mais uma vez, as configurações para o regulador serão seleccionadas. Consulte o capítulo 7.5 Configurações para mais informações acerca das configurações do servo-regulador.
A tendência na tela acima apresenta a unidade reguladora a funcionar fisicamente. A tendência apresenta a posição do regulador real como resultado da posição real da Máquina. Além disso, é possível adicionar alguma informação secundária que pode ajudar no ajuste da unidade reguladora.
Predefinição da velocidade da Máquina em fileiras por minuto e posição real da Máquina em graus.
Velocidade e posição reais da unidade reguladora.
É possível desviar-ajustar o CAM da unidade reguladora de acordo com a posição da Máquina. Se o desvio for de 0˚, o CAM da unidade reguladora iniciará quando a posição real da Máquina for 0˚. Se o desvio é de 90˚, o CAM da unidade reguladora iniciará quando a posição real da Máquina for 90˚.
Esta é a velocidade com que o CAM da Unidade Reguladora agora em funcionamento é testado. A velocidade da máquina não pode exceder este valor enquanto a unidade reguladora estiver a funcionar. Se for introduzida uma velocidade da Máquina superior ou se a unidade reguladora for iniciada quando a velocidade da Máquina estiver muito alta, a velocidade da Máquina será diminuída automaticamente para a velocidade de teste. Será ainda apresentado um alarme, consulte o capítulo 7.8 Alarmes.

Projecto Nº: 106246 Página 79
7.3.1 TENDÊNCIA DA UNIDADE REGULADORA
A unidade reguladora está estimada na tela Regulador. A tendência apresenta continuamente a posição actual da unidade reguladora. A descrição abaixo explica como as cabeças depositadoras 1-3, o alicate de corte eléctrico e o bocal podem ser apresentados/estimados na mesma tendência por forma a comparar a coordenação do equipamento adicional.
7.3.2 ESTIMAR A CABEÇA DEPOSITADORA 1-3 COM A UNIDADE REGULADORA
Os cinco estados possíveis do botão Apresentação do Depósito são mostrados acima. Alternando o botão, é possível apresentar quando as cabeças depositadoras 1, 2 ou 3 estão a depositar. É muito útil ver o depósito comparado com a unidade reguladora ao ajustar o desvio e projectar a curva CAM. É mostrado abaixo um exemplo com as cabeças depositadoras 1 a 3 apresentadas em tendência.
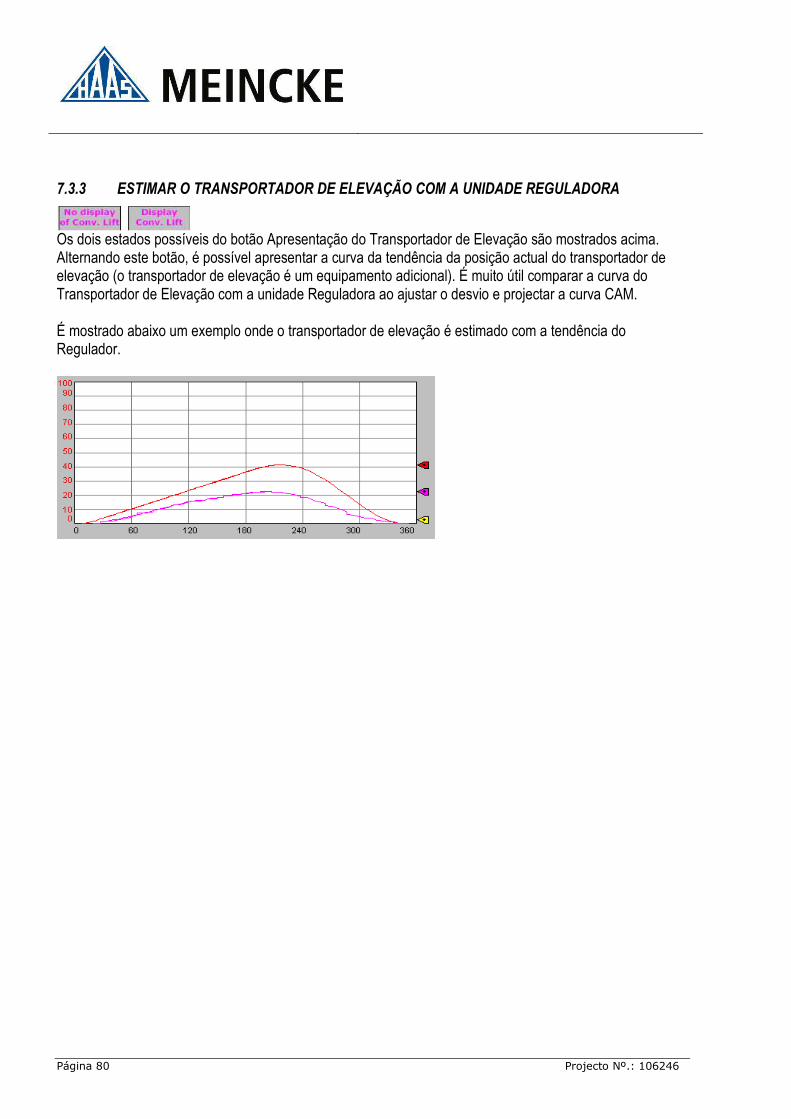
Página 80 Projecto Nº.: 106246
7.3.3 ESTIMAR O TRANSPORTADOR DE ELEVAÇÃO COM A UNIDADE REGULADORA
Os dois estados possíveis do botão Apresentação do Transportador de Elevação são mostrados acima. Alternando este botão, é possível apresentar a curva da tendência da posição actual do transportador de elevação (o transportador de elevação é um equipamento adicional). É muito útil comparar a curva do Transportador de Elevação com a unidade Reguladora ao ajustar o desvio e projectar a curva CAM. É mostrado abaixo um exemplo onde o transportador de elevação é estimado com a tendência do Regulador.

Projecto Nº: 106246 Página 81
7.3.4 ESTIMAR O CORTE DE AGULHA COM A UNIDADE REGULADORA
Os dois estados possíveis do botão Apresentação da Agulha são mostrados acima. Alternando este botão, é possível apresentar quando a agulha está activa (a agulha é um equipamento adicional). É muito útil ver quando a agulha está activa em comparação com a unidade Reguladora ao ajustar o desvio e projectar a curva CAM. É mostrado abaixo um exemplo com a agulha apresentada em tendência.
7.3.5 ESTIMAR O ALICATE DE CORTE ELÉCTRICO COM A UNIDADE REGULADORA
Os dois estados possíveis do botão de apresentação do alicate de corte eléctrico são mostrados acima. Alternando este botão, é possível apresentar a curva da tendência da posição actual do alicate de corte eléctrico (o alicate de corte eléctrico é um equipamento adicional). É muito útil ver a curva do alicate de corte eléctrico comparada com a unidade reguladora ao ajustar o desvio e projectar a curva CAM.
7.3.6 CAM DO REGULADOR
No CAM a Máquina é o mestre e a unidade reguladora é o escravo. O CAM tem oito pontos de 0 a 7. Cada ponto é um comando que descreve onde a unidade reguladora deve estar quando o mestre está numa certa posição. Como padrão, o ponto 0 é 0,0 e o ponto 7 é 350,0 e não pode ser alterado.
7.3.7 CÁLCULOS CAM
Neste modo, todos os pontos são automaticamente calculados pelo controlador. Os cálculos dos pontos CAM estão baseados nos seguintes pontos de definição introduzidos pelo operador: a velocidade da Máquina, a velocidade do transportador e o comprimento regulador.
Página 82 Projecto Nº.: 106246
O controlador calcula um perfil regulador que move a cabeça depositadora para a frente à mesma velocidade exacta que o transportador ou esteira do forno. Quando a Cabeça Depositadora se deslocar a distância do comprimento Regulador, esta retorna à posição 0. Por forma a obter a velocidade da Máquina, o comprimento regulador e a velocidade de retorno são variáveis.
7.3.8 LIMITES AO CÁLCULO CAM
A velocidade da Máquina, o comprimento regulador e a velocidade do transportador são limitados. Todos os três parâmetros têm influência sobre os limites de cada um dos outros. O aumento da velocidade da Máquina resultará num comprimento regulador mais curto e/ou velocidade do transportador mais alta. Isso acontece porque quando a velocidade da Máquina é alta, a cabeça depositadora não tem tempo suficiente para percorrer a distância antes de ter de voltar, de forma a chegar à posição 0 antes do próximo regulador. O aumento do comprimento regulador resultará numa velocidade da Máquina mais baixa e/ou velocidade do transportador mais alta. Isso acontece porque quando o comprimento regulador é aumentado, a cabeça depositadora não tem tempo suficiente para percorrer a distância antes de ter de voltar, de forma a chegar à posição 0 antes do próximo regulador. A diminuição da velocidade do transportador resultará numa velocidade da Máquina mais baixa e/ou comprimento regulador mais curto. Isso acontece porque quando a velocidade do transportador é baixa, o comprimento regulador não tem tempo suficiente para percorrer uma grande distância antes de ter de voltar, de forma a chegar à posição 0 antes do próximo regulador. A tabela abaixo mostra as relações entre a velocidade da Máquina, o comprimento regulador e a velocidade do transportador. Velocidade da máquina ↑
⇒ Comprimento regulador ↓
Velocidade do transportador ↑
Comprimento regulador ↑
⇒ Velocidade da máquina ↓
Velocidade do transportador ↑
Velocidade do transportador ↓
⇒ Velocidade da máquina ↓
Comprimento regulador ↓
7.3.9 CALCULAR E TESTAR O CAM
Antes de trabalhar com a unidade reguladora fisicamente, o CAM deve ser calculado e testado.
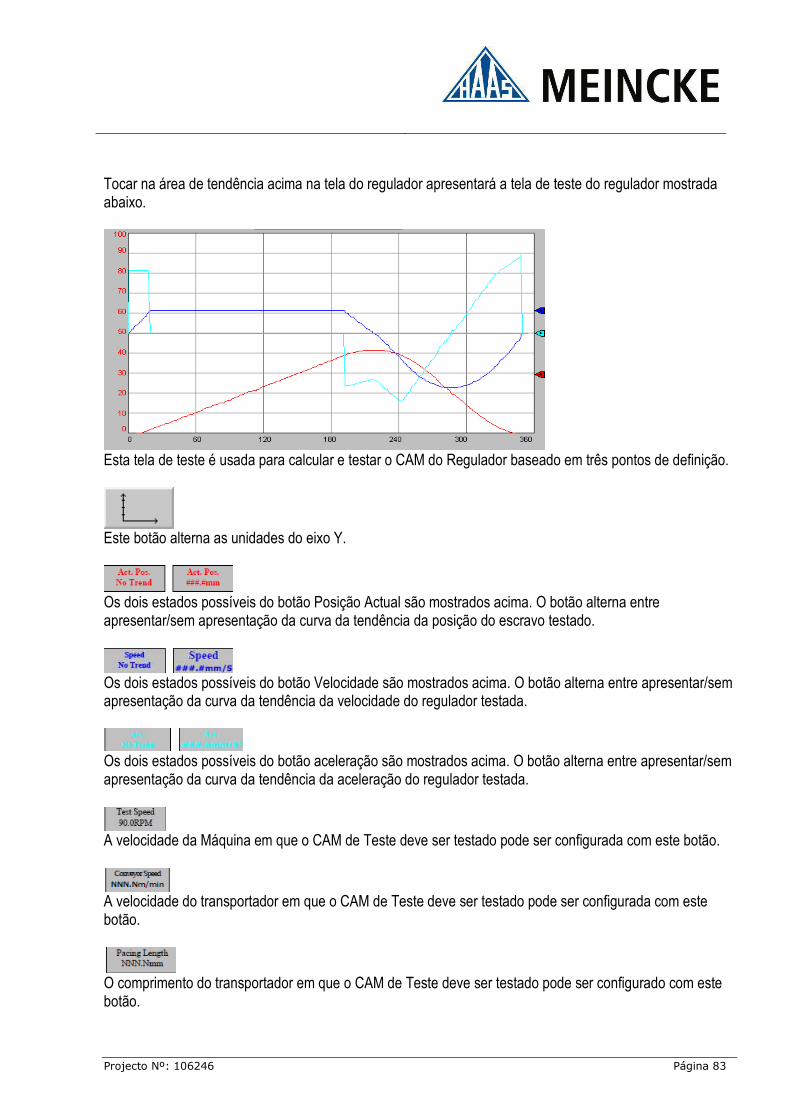
Projecto Nº: 106246 Página 83
Tocar na área de tendência acima na tela do regulador apresentará a tela de teste do regulador mostrada abaixo.
Esta tela de teste é usada para calcular e testar o CAM do Regulador baseado em três pontos de definição.
Este botão alterna as unidades do eixo Y.
Os dois estados possíveis do botão Posição Actual são mostrados acima. O botão alterna entre apresentar/sem apresentação da curva da tendência da posição do escravo testado.
Os dois estados possíveis do botão Velocidade são mostrados acima. O botão alterna entre apresentar/sem apresentação da curva da tendência da velocidade do regulador testada.
Os dois estados possíveis do botão aceleração são mostrados acima. O botão alterna entre apresentar/sem apresentação da curva da tendência da aceleração do regulador testada.
A velocidade da Máquina em que o CAM de Teste deve ser testado pode ser configurada com este botão.
A velocidade do transportador em que o CAM de Teste deve ser testado pode ser configurada com este botão.
O comprimento do transportador em que o CAM de Teste deve ser testado pode ser configurado com este botão.
Página 84 Projecto Nº.: 106246
Nota: A distância para a aceleração/desaceleração não está incluída no comprimento regulador. Veja o botão Movimento Regulador abaixo.
Esta é a distância calculada em que a unidade reguladora se movimentará para frente.
Com este botão de predefinição pode configurar a aceleração de zero à velocidade do regulador. O valor de aceleração é configurado em graus de movimento da Máquina, e quanto mais alto o valor, mais baixa se torna a aceleração. Nota: A aceleração aumenta se a velocidade da Máquina for alterada dado que, quanto mais rápido a Máquina funcionar, mais curto é o tempo disponível para aceleração.
Com este botão de predefinição a desaceleração/aceleração da velocidade do regulador para a velocidade de retorno pode ser configurada. O valor de aceleração/desaceleração é configurado em graus de movimento da Máquina, e quanto mais alto o valor, mais baixa se torna a aceleração/desaceleração. Nota: A aceleração/desaceleração aumenta se a velocidade da Máquina for alterada dado que, quanto mais rápido a Máquina funcionar, mais curto será o tempo disponível para aceleração/desaceleração.
Com este botão de predefinição pode configurar a desaceleração de zero à velocidade de retorno. O valor de desaceleração é configurado em graus de movimento da Máquina, e quanto mais alto o valor, mais baixa se torna a desaceleração. Nota: A desaceleração aumenta se a velocidade da Máquina for alterada dado que, quanto mais rápido a Máquina funcionar, mais curto será o tempo disponível para desaceleração.
Com este botão o CAM testado pode ser aceite e deslocado para o CAM fisicamente em funcionamento. Se o regulador está fisicamente a funcionar, este utilizará o CAM testado na próxima vez que a posição Actual da Máquina cruzar a posição de desvio. Se o teste do CAM de teste não estiver de acordo, o programa não o aceitará e não movimentará o CAM de Teste para o CAM em funcionamento.

Projecto Nº: 106246 Página 85
Utilize este botão para voltar à Tela Regulador.
7.3.10 APRESENTAÇÃO DE INFORMAÇÃO RELACIONADA COM A ALTERAÇÃO E TESTE DO
CAM
Esta apresentação mostra textos informativos relativos à unidade reguladora. Os seguintes textos informativos são apresentados: Projecção Automática do CAM de Teste do Regulador Esta Informação da Máquina é apresentada nos primeiros quatro segundos depois da introdução da tela de Projecção Manual. Falha do regulador Unidade Reguladora Física cometeu um erro. Regulador, CAM de Teste está ok O CAM de Teste passou no teste de Posição, Velocidade e aceleração. A testar o CAM do Regulador XXX% O CAM de Teste está a testar a posição, velocidade e aceleração. Regulador Entre Pontos Mestre 10˚ A distância entre pontos mestre no CAM de Teste não pode ser menos que 10˚. Nível Mínimo do Regulador 0 mm A posição escrava introduzida no CAM de Teste é mais baixa que o limite mínimo para a unidade Reguladora. Nível Máximo do Regulador X mm A posição escrava introduzida no CAM de Teste é mais alta que o limite máximo para a unidade Reguladora.
Página 86 Projecto Nº.: 106246
Cam do Regulador Excedeu a posição Mínima A posição está a exceder o limite mínimo durante o teste. Consulte a linha de limite mínimo na curva de tendência. Cam do Regulador Excedeu a posição Máxima A posição está a exceder o limite máximo durante o teste. Consulte a linha de limite máximo na curva de tendência. Cam do Regulador Excedeu o limite de velocidade Neg. O limite negativo de velocidade é excedido durante o Teste. Consulte a linha de limite mínimo na curva de tendência. Cam do Regulador Excedeu o limite de velocidade Pos. O limite positivo de velocidade é excedido durante o Teste. Consulte a linha de limite máximo na curva de tendência. Cam do Regulador Excedeu o limite de Desaceleração O limite negativo de desaceleração é excedido durante o Teste. Consulte a linha de limite mínimo na curva de tendência. Cam do Regulador Excedeu o limite de Aceleração O limite positivo de aceleração é excedido durante o Teste. Consulte a linha de limite máximo na curva de tendência. Novo CAM de Teste está a ser Calculado O Controlador está a calcular um novo CAM de Teste. O CAM em funcionamento é substituído pelo CAM de Teste O botão Aceitar CAM de Teste foi premido e o CAM de Teste é deslocado para o CAM em Funcionamento. Erro de Posição do Regulador A Unidade Reguladora Física cometeu um erro devido a um erro de posição. O CAM não pode ser calculado com os valores introduzidos O controlador pode não calcular a curva CAM com os pontos de definição introduzidos. Introduza novos pontos de definição.
7.3.11 CURVA CAM
A curva do Regulador pode ser dividida em cinco partes.
8. A acelerar de uma velocidade nula para a velocidade do regulador. Esta aceleração pode ser controlada introduzindo X graus com o botão Ac. Inicial.
Projecto Nº: 106246 Página 87
9. A deslocar com velocidade constante (a mesma que para o transportador ou esteira do forno). Este ponto de definição pode ser alterado com o botão velocidade do transportador. O comprimento regulador é introduzido em Comprimento Regulador.
10. Desacelerar a unidade reguladora para uma velocidade nula e acelerar a unidade reguladora para velocidade inversa. A desaceleração/aceleração pode ser alterada com o botão Máxima Desac./Ac.
11. Velocidade de retorno. 12. Desacelerar a velocidade de retorno para zero. A desaceleração/aceleração pode ser alterada com
o botão Desac./Ac. Final.

Página 88 Projecto Nº.: 106246
7.3.12 COMO CALCULAR E TESTAR O CAM
13. Prima o botão Velocidade da Máquina e introduza a velocidade da Máquina desejada com a qual testar o CAM, por exemplo, 50 RPM.
14. Prima o botão Comprimento Regulador e introduza o comprimento regulador com que testar o CAM, por exemplo, 40 mm.
15. Prima o botão Velocidade do Transportador e introduza a velocidade do Transportador desejada com a qual testar o CAM, por exemplo, 5 m/min.
16. Prima o botão Ac. Inicial e introduza a aceleração Inicial com que testar o CAM, por exemplo, 30˚. 17. Prima o botão Máxima Desac./Ac. e introduza a desaceleração/aceleração com que testar o CAM,
por exemplo, 40˚. 18. Prima o botão Desac. Final e introduza a desaceleração Final com que testar o CAM, por exemplo,
30˚. 19. O controlador está a calcular o CAM. O mostrador de informação irá escrever: “Novo CAM de Teste
está a ser Calculado”. 20. Quando o CAM está calculado, o CAM está a ser testado e o mostrador irá escrever: “A testar o
Cam do Regulador” 21. Quando o CAM está testado, o mostrador irá escrever: ”CAM está OK” se o CAM passou no teste. 22. Se o teste não foi passado, podem existir diferentes mensagens. O mostrador irá explicar. Se um
teste não for passado, será normalmente devido a um limite de posição, Velocidade ou aceleração que foi excedido. Se for este o caso, espere que a tendência actualize a curva do CAM testado e localize onde o limite foi excedido. Consulte a tela abaixo onde o limite de aceleração e
desaceleração foi excedido. Nota: pode levar até 20 seg. para actualizar a curva de teste do CAM dependendo da velocidade da Máquina introduzida para o teste.
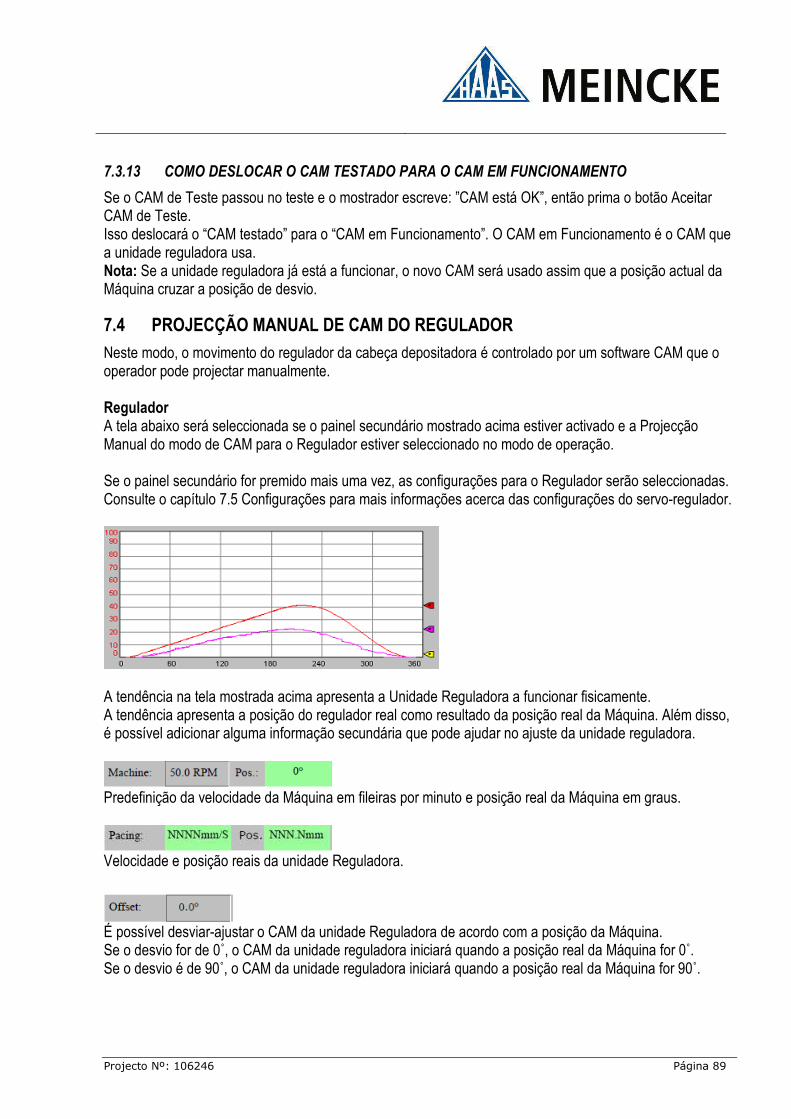
Projecto Nº: 106246 Página 89
7.3.13 COMO DESLOCAR O CAM TESTADO PARA O CAM EM FUNCIONAMENTO
Se o CAM de Teste passou no teste e o mostrador escreve: ”CAM está OK”, então prima o botão Aceitar CAM de Teste. Isso deslocará o “CAM testado” para o “CAM em Funcionamento”. O CAM em Funcionamento é o CAM que a unidade reguladora usa. Nota: Se a unidade reguladora já está a funcionar, o novo CAM será usado assim que a posição actual da Máquina cruzar a posição de desvio.
7.4 PROJECÇÃO MANUAL DE CAM DO REGULADOR
Neste modo, o movimento do regulador da cabeça depositadora é controlado por um software CAM que o operador pode projectar manualmente. Regulador A tela abaixo será seleccionada se o painel secundário mostrado acima estiver activado e a Projecção Manual do modo de CAM para o Regulador estiver seleccionado no modo de operação. Se o painel secundário for premido mais uma vez, as configurações para o Regulador serão seleccionadas. Consulte o capítulo 7.5 Configurações para mais informações acerca das configurações do servo-regulador.
A tendência na tela mostrada acima apresenta a Unidade Reguladora a funcionar fisicamente. A tendência apresenta a posição do regulador real como resultado da posição real da Máquina. Além disso, é possível adicionar alguma informação secundária que pode ajudar no ajuste da unidade reguladora.
Predefinição da velocidade da Máquina em fileiras por minuto e posição real da Máquina em graus.
Velocidade e posição reais da unidade Reguladora.
É possível desviar-ajustar o CAM da unidade Reguladora de acordo com a posição da Máquina. Se o desvio for de 0˚, o CAM da unidade reguladora iniciará quando a posição real da Máquina for 0˚. Se o desvio é de 90˚, o CAM da unidade reguladora iniciará quando a posição real da Máquina for 90˚.

Página 90 Projecto Nº.: 106246
Esta é a velocidade com que o CAM da Unidade Reguladora agora em funcionamento é testado. A velocidade da máquina não pode exceder esse valor enquanto a unidade reguladora estiver a funcionar. Se for introduzida uma velocidade da Máquina superior ou se a unidade reguladora for iniciada quando a velocidade da Máquina estiver muito alta, a velocidade da Máquina será diminuída automaticamente para a velocidade de teste e um alarme será apresentado (consulte o capítulo 7.8 Alarmes).
7.4.1 TENDÊNCIA DA UNIDADE REGULADORA
A unidade reguladora está estimada na tela Regulador. A tendência apresenta continuamente a posição actual da unidade reguladora. A descrição abaixo descreve como as cabeças depositadoras 1-3, o alicate de corte eléctrico e o bocal podem ser apresentados/estimados na mesma tendência por forma a comparar a coordenação das unidades.
7.4.2 ESTIMAR AS CABEÇAS DEPOSITADORAS 1-3 COM A UNIDADE REGULADORA
Os cinco estados possíveis do botão Apresentação do Depósito são mostrados acima. Alternando este botão, é possível apresentar quando as cabeças depositadoras 1, 2 ou 3 estão a depositar. É muito útil ver o depósito comparado com a unidade reguladora ao ajustar o desvio e projectar a curva CAM. É mostrado abaixo um exemplo com as Cabeças depositadoras 1 a 3 apresentadas em tendência.
7.4.3 ESTIMAR O TRANSPORTADOR DE ELEVAÇÃO COM A UNIDADE REGULADORA
Os dois estados possíveis do botão apresentação do Transportador de Elevação são mostrados acima. Alternando este botão, é possível apresentar a curva da tendência da posição actual do transportador de elevação (o transportador de elevação é equipamento adicional). É muito útil comparar a curva do transportador de elevação com a unidade Reguladora ao ajustar o desvio e projectar a curva CAM. É mostrado abaixo um exemplo onde o Transportador de elevação é estimado com a tendência do regulador.

Projecto Nº: 106246 Página 91
7.4.4 ESTIMAR O CORTE DE AGULHA COM A UNIDADE REGULADORA
Os dois estados possíveis do botão Apresentação da Agulha são mostrados acima. Alternando este botão, é possível apresentar quando a agulha está activa (a agulha é equipamento adicional). É muito útil ver quando a agulha está activa em comparação com a unidade reguladora ao ajustar o desvio e projectar a curva CAM. É mostrado abaixo um exemplo com a agulha apresentada em tendência.
7.4.5 ESTIMAR O ALICATE DE CORTE ELÉCTRICO COM A UNIDADE REGULADORA
Os dois estados possíveis do botão alicate de corte eléctrico são mostrados acima. Alternando este botão, é possível apresentar a curva da tendência da posição actual do alicate de corte eléctrico (o alicate de corte eléctrico é equipamento adicional). É muito útil ver a curva do alicate de corte eléctrico comparada com a unidade reguladora ao ajustar o desvio e projectar a curva CAM.
7.4.6 CAM DO REGULADOR
No CAM a Máquina é o mestre e a unidade reguladora é o escravo. O CAM tem oito pontos de 0 a 7. Cada ponto é um comando que descreve onde a unidade reguladora deve estar quando a Máquina (o mestre) está numa certa posição. Como padrão, o ponto 0 é 0,0 e o ponto 7 é 350,0 e não pode ser alterado.
7.4.7 CURVA CAM
Neste modo, todos os pontos são alterados manualmente pelo operador. O operador projecta um perfil de regulador que desloca a cabeça depositadora para a frente ou para trás dentro de um ciclo da Máquina. O CAM pode ser projectado de modo que a cabeça depositadora se desloque para a frente/para trás várias vezes dentro de um ciclo da Máquina.

Página 92 Projecto Nº.: 106246
7.4.8 PROJECTAR E TESTAR O CAM
Alterar o CAM pode ser feito durante o funcionamento da depositadora. No entanto, antes de utilizar um novo CAM, o programa tem de testar se a posição, a velocidade e a aceleração estão dentro dos limites da unidade reguladora. Projectar e testar um novo CAM é efectuado numa tela separada. Toque em qualquer ponto da curva de tendência na tela da unidade reguladora para introduzir a tela de projecção do CAM apresentada abaixo.
A tendência na tela mostrada acima apresenta uma unidade reguladora virtual como resultado de uma posição da Máquina virtual. A unidade reguladora e Máquina virtuais são usadas para projectar e testar novos CAMs de Regulador. A tendência apresenta a posição do regulador real como resultado da posição real da Máquina. A tendência tem oito pontos verdes. Cada ponto representa uma posição mestre e escrava no CAM do Regulador. A Máquina é mestre e o regulador é escravo.
Premir o botão mostrado acima apresentará a tela popup mostrada abaixo. 0 1 2 3 4 5 6 7 Mestre: 0,0 150,0 175,0 265,0 285,0 315,0 349,0 350,0 Escravo: 0,0 33,0 30,0 12,0 6,0 2,0 0,0 0,0 Tipo: Cúbico Linear Cúbico Cúbico Cúbico Cúbico Cúbico Cúbico A tela popup apresenta todos os oito tipos de Mestres, escravos e pontos no CAM de Teste. Alterando os 8 conjuntos de pontos CAM, é possível projectar manualmente a sua própria curva CAM especial. A posição do ponto CAM na curva de tendência será alterada quando forem introduzidos novos valores no CAM de Teste. Os botões de predefinição Mestre de 0-7 são posições da Máquina, e os valores predefinidos de 0-360˚ podem ser introduzidos (Mestres 1 e 8 são configurados para “0” e não podem ser alterados).
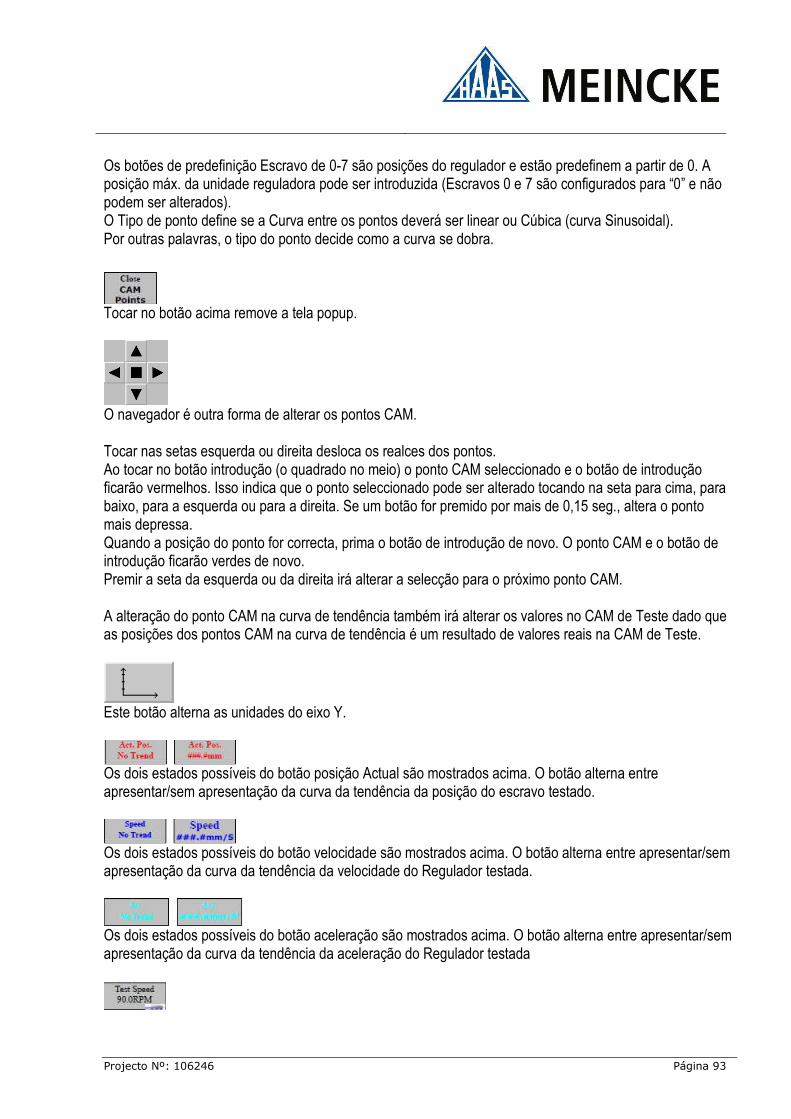
Projecto Nº: 106246 Página 93
Os botões de predefinição Escravo de 0-7 são posições do regulador e estão predefinem a partir de 0. A posição máx. da unidade reguladora pode ser introduzida (Escravos 0 e 7 são configurados para “0” e não podem ser alterados). O Tipo de ponto define se a Curva entre os pontos deverá ser linear ou Cúbica (curva Sinusoidal). Por outras palavras, o tipo do ponto decide como a curva se dobra.
Tocar no botão acima remove a tela popup.
O navegador é outra forma de alterar os pontos CAM. Tocar nas setas esquerda ou direita desloca os realces dos pontos. Ao tocar no botão introdução (o quadrado no meio) o ponto CAM seleccionado e o botão de introdução ficarão vermelhos. Isso indica que o ponto seleccionado pode ser alterado tocando na seta para cima, para baixo, para a esquerda ou para a direita. Se um botão for premido por mais de 0,15 seg., altera o ponto mais depressa. Quando a posição do ponto for correcta, prima o botão de introdução de novo. O ponto CAM e o botão de introdução ficarão verdes de novo. Premir a seta da esquerda ou da direita irá alterar a selecção para o próximo ponto CAM. A alteração do ponto CAM na curva de tendência também irá alterar os valores no CAM de Teste dado que as posições dos pontos CAM na curva de tendência é um resultado de valores reais na CAM de Teste.
Este botão alterna as unidades do eixo Y.
Os dois estados possíveis do botão posição Actual são mostrados acima. O botão alterna entre apresentar/sem apresentação da curva da tendência da posição do escravo testado.
Os dois estados possíveis do botão velocidade são mostrados acima. O botão alterna entre apresentar/sem apresentação da curva da tendência da velocidade do Regulador testada.
Os dois estados possíveis do botão aceleração são mostrados acima. O botão alterna entre apresentar/sem apresentação da curva da tendência da aceleração do Regulador testada
Página 94 Projecto Nº.: 106246
A velocidade da Máquina com a qual se testa o “CAM de Teste” pode ser configurada através deste botão de predefinição.
Com este botão o CAM testado pode ser aceite e deslocado para o CAM fisicamente em funcionamento. Se o regulador está fisicamente a funcionar, este utilizará o CAM testado na próxima vez que a posição Actual da Máquina cruzar a posição de desvio. Se o teste do CAM de teste não estiver de acordo, o programa não o aceitará e não movimentará o CAM de Teste para o CAM em funcionamento.
Utilize este botão para voltar à Tela Regulador.
7.4.9 APRESENTAÇÃO DE INFORMAÇÃO RELACIONADA COM A ALTERAÇÃO E TESTE DO
CAM
Esta apresentação mostra textos informativos relativos à unidade Reguladora. Os seguintes textos informativos são apresentados: Projecção Automática do CAM de Teste do Regulador Esta Informação é apresentada nos primeiros quatro segundos depois da introdução da telacrã de Projecção Manual. Falha do regulador Unidade Reguladora Física cometeu um erro. Regulador, Cam de Teste está ok O CAM de Teste passou no teste de Posição, Velocidade e aceleração. A testar o Cam do Regulador XXX% O CAM de Teste está a testar a posição, velocidade e aceleração. Regulador Entre Pontos Mestre 10˚ A distância entre pontos mestre no CAM de Teste não pode ser menos que 10˚. Nível Mínimo do Regulador 0 mm A posição escrava introduzida no CAM de Teste é mais baixa que o limite mínimo para a unidade Reguladora. Nível Máximo do Regulador X mm A posição escrava introduzida no CAM de Teste é mais alta que o limite máximo para a unidade Reguladora.

Projecto Nº: 106246 Página 95
Cam do Regulador Excedeu a posição Mínima A posição está a exceder o limite mínimo durante o teste. Consulte a linha de limite mínimo na curva de tendência. Cam do Regulador Excedeu a posição Máxima A posição está a exceder o limite máximo durante o teste. Consulte a linha de limite máximo na curva de tendência. Cam do Regulador Excedeu o limite de velocidade Neg. O limite negativo de velocidade é excedido durante o teste. Consulte a linha de limite mínimo na curva de tendência. Cam do Regulador Excedeu o limite de velocidade Pos. O limite positivo de velocidade é excedido durante o teste. Consulte a linha de limite máximo na curva de tendência. Cam do Regulador Excedeu o limite de Desaceleração O limite negativo de desaceleração é excedido durante o teste. Consulte a linha de limite mínimo na curva de tendência. Cam do Regulador Excedeu o limite de Aceleração O limite positivo de desaceleração é excedido durante o teste. Consulte a linha de limite máximo na curva de tendência. Novo CAM de Teste está a ser Calculado O Controlador está a calcular um novo CAM de Teste. O CAM em funcionamento é substituído pelo CAM de Teste O botão Aceitar CAM de Teste foi premido e o CAM de Teste é deslocado para o CAM em Funcionamento. Erro de Posição do Regulador A Unidade Reguladora Física cometeu um erro devido a um erro de posição. O CAM não pode ser calculado com os valores introduzidos O controlador pode não calcular a curva CAM com os pontos de definição introduzidos. Introduza novos pontos de definição.
7.4.10 COMO PROJECTAR E TESTAR UM NOVO CAM (POR EXEMPLO, COM UMA CURVA DO
REGULADOR)
23. Prima “Apresentar pontos CAM” para apresentar a tela de popup com o CAM DE TESTE. 24. Configure todos os valores escravos para zero. 25. Decida quantos pontos são necessários para criar a curva CAM: 1 ponto para iniciar o CAM, 1 ponto
para iniciar o Regulador, 1 ponto para parar o Regulador, 1 ponto para controlar a posição máx., 1 ponto para iniciar o retorno, 1 ponto para parar o retorno, 1 ponto para terminar a curva, 1 ponto para Terminar o CAM. 8 Pontos é usado para este exemplo. (Se usar 8 pontos desloque o

Página 96 Projecto Nº.: 106246
mestre/escravo/tipo do ponto 7 para 349˚/0 mm/linear e se usar 7 pontos desloque também o mestre/escravo/tipo do ponto 6 para 348˚/0 mm/linear e assim por diante.).
26. Ponto de definição 0 tipo = cúbico, ponto de definição 1 = Linear, ponto de definição 2 = Cúbico, ponto de definição 3 = Cúbico, ponto de definição 4 = Cúbico, ponto de definição 5 = Cúbico, ponto de definição 6 = Cúbico, ponto de definição 7 = Cúbico. (O tipo cúbico arredonda a curva em vez do movimento linear entre os pontos.).
27. Ponto de definição 1 mestre = 25˚, ponto de definição 2 mestre = 115˚, ponto de definição 3 mestre = 175˚, ponto de definição 4 mestre = 232˚, ponto de definição 5 mestre = 248˚e ponto de definição 6 mestre = 266˚.
28. Ponto de definição 1 escravo = 3,5 mm, ponto de definição 2 escravo = 25 mm, ponto de definição 3 escravo = 30 mm, ponto de definição 4 escravo = 17 mm, ponto de definição 5 escravo = 7 mm e ponto de definição 6 escravo r = 2,5mm.
29. Prima “Fechar pontos CAM” para remover a tela de popup com o CAM de Teste. 30. Prima o botão de predefinição “Velocidade de Teste” e introduza 30 RPM. 31. Verifique que o CAM está a ser testado e clique em OK. 32. Tente aumentar a velocidade de teste e verifique que a uma certa velocidade o teste falha devido a
“Alta velocidade ou aceleração”. 33. Espere que a tendência actualize a curva. (Pode levar até 20 seg. numa velocidade baixa). 34. Localize onde a velocidade ou aceleração falhou (Verifique a linha de limite horizontal) e encontre
os pontos CAM mais próximos, por exemplo, o ponto 4. 35. Seleccione o ponto CAM 4 tocando na seta da direita ou esquerda no navegador. 36. Prima “introduzir” no navegador quando o ponto 4 estiver a piscar a verde. 37. Quando o Ponto 4 estiver a piscar a vermelho: Prima a seta da esquerda e baixe o mestre do ponto
4 em 5˚. 38. Espere que o programa teste e faça a curva de tendência. Verifique que a aceleração diminuiu. 39. Prima a seta para baixo e baixe o escravo do ponto 4 em 1 mm. 40. Espere que o programa teste e faça a curva de tendência. Verifique que a aceleração diminuiu de
novo. 41. Para alterar outros pontos: Prima Introduzir e toque nas setas da esquerda e direita para
movimentar para o próximo ponto. Para alterar este ponto, prima de novo e use as setas para alterar a posição mestre e escrava.
42. Continue a alterar os pontos CAM com o navegador e a aumentar a velocidade de Teste até que a Velocidade e a curva CAM estejam satisfatórias e o CAM teste OK.
7.4.11 COMO PROJECTAR, TESTAR E DESLOCAR O CAM TESTADO PARA O CAM EM
FUNCIONAMENTO
Prima o botão “Velocidade da Máquina“ e introduza a Velocidade da Máquina com a qual testar o CAM, por exemplo, 50 RPM.
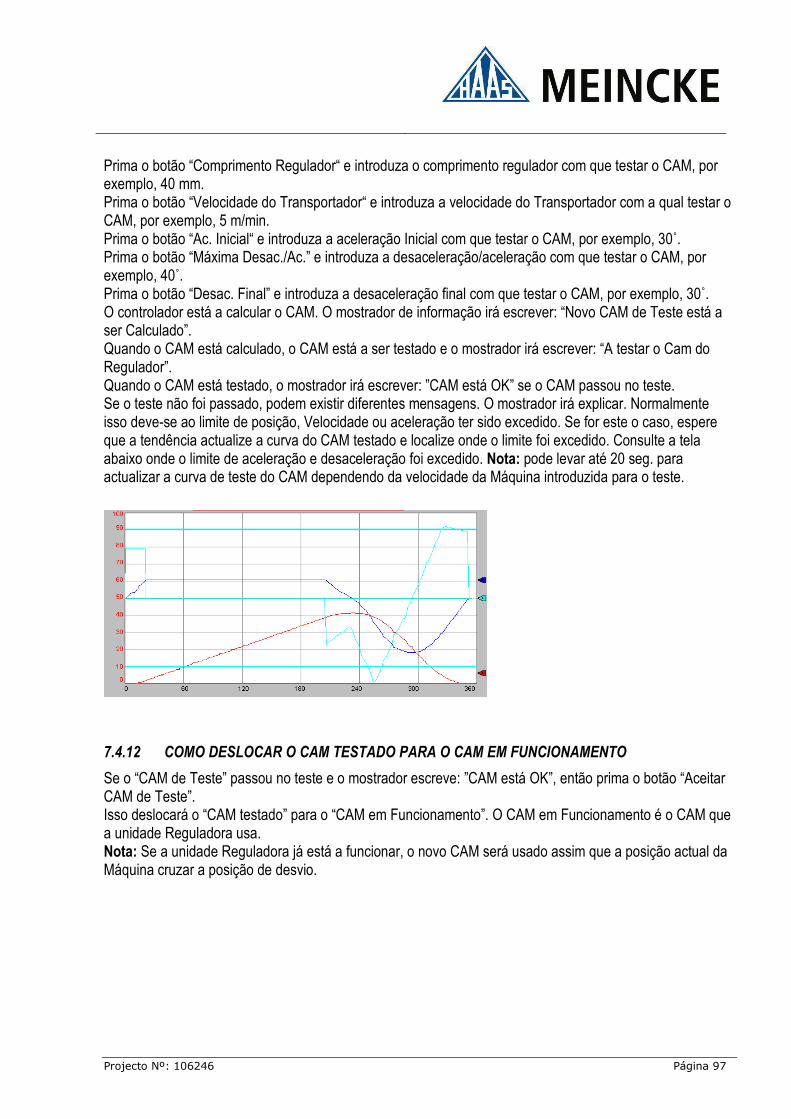
Projecto Nº: 106246 Página 97
Prima o botão “Comprimento Regulador“ e introduza o comprimento regulador com que testar o CAM, por exemplo, 40 mm. Prima o botão “Velocidade do Transportador“ e introduza a velocidade do Transportador com a qual testar o CAM, por exemplo, 5 m/min. Prima o botão “Ac. Inicial“ e introduza a aceleração Inicial com que testar o CAM, por exemplo, 30˚. Prima o botão “Máxima Desac./Ac.” e introduza a desaceleração/aceleração com que testar o CAM, por exemplo, 40˚. Prima o botão “Desac. Final” e introduza a desaceleração final com que testar o CAM, por exemplo, 30˚. O controlador está a calcular o CAM. O mostrador de informação irá escrever: “Novo CAM de Teste está a ser Calculado”. Quando o CAM está calculado, o CAM está a ser testado e o mostrador irá escrever: “A testar o Cam do Regulador”. Quando o CAM está testado, o mostrador irá escrever: ”CAM está OK” se o CAM passou no teste. Se o teste não foi passado, podem existir diferentes mensagens. O mostrador irá explicar. Normalmente isso deve-se ao limite de posição, Velocidade ou aceleração ter sido excedido. Se for este o caso, espere que a tendência actualize a curva do CAM testado e localize onde o limite foi excedido. Consulte a tela abaixo onde o limite de aceleração e desaceleração foi excedido. Nota: pode levar até 20 seg. para actualizar a curva de teste do CAM dependendo da velocidade da Máquina introduzida para o teste.
7.4.12 COMO DESLOCAR O CAM TESTADO PARA O CAM EM FUNCIONAMENTO
Se o “CAM de Teste” passou no teste e o mostrador escreve: ”CAM está OK”, então prima o botão “Aceitar CAM de Teste”. Isso deslocará o “CAM testado” para o “CAM em Funcionamento”. O CAM em Funcionamento é o CAM que a unidade Reguladora usa. Nota: Se a unidade Reguladora já está a funcionar, o novo CAM será usado assim que a posição actual da Máquina cruzar a posição de desvio.
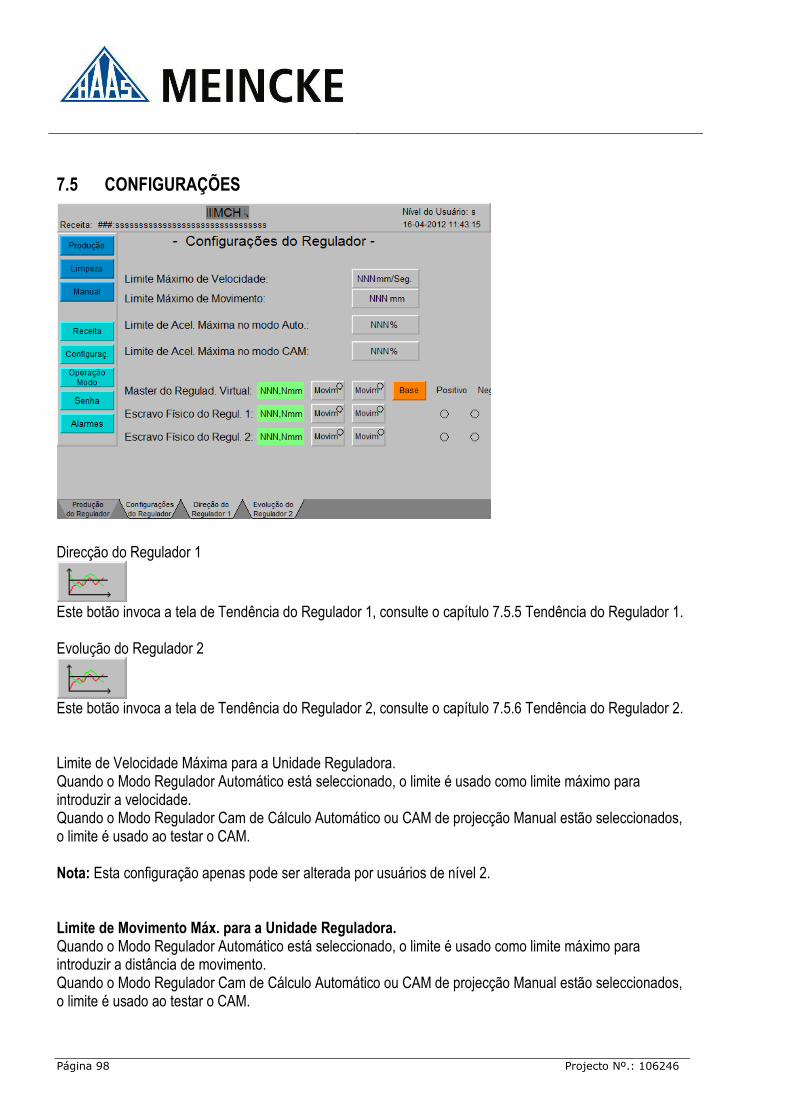
Página 98 Projecto Nº.: 106246
7.5 CONFIGURAÇÕES
Direcção do Regulador 1
Este botão invoca a tela de Tendência do Regulador 1, consulte o capítulo 7.5.5 Tendência do Regulador 1. Evolução do Regulador 2
Este botão invoca a tela de Tendência do Regulador 2, consulte o capítulo 7.5.6 Tendência do Regulador 2. Limite de Velocidade Máxima para a Unidade Reguladora. Quando o Modo Regulador Automático está seleccionado, o limite é usado como limite máximo para introduzir a velocidade. Quando o Modo Regulador Cam de Cálculo Automático ou CAM de projecção Manual estão seleccionados, o limite é usado ao testar o CAM. Nota: Esta configuração apenas pode ser alterada por usuários de nível 2. Limite de Movimento Máx. para a Unidade Reguladora. Quando o Modo Regulador Automático está seleccionado, o limite é usado como limite máximo para introduzir a distância de movimento. Quando o Modo Regulador Cam de Cálculo Automático ou CAM de projecção Manual estão seleccionados, o limite é usado ao testar o CAM.
Projecto Nº: 106246 Página 99
Nota: Esta configuração apenas pode ser alterada por usuários de nível 2. Limite de Aceleração Máx. para a Unidade Reguladora quando Unidade Reguladora de Modo Automático está seleccionado. O Limite é usado ao introduzir a Aceleração. Nota: Esta configuração apenas pode ser alterada por usuários de nível 2. Limite de Aceleração Máx. para a Unidade Reguladora quando Unidade Reguladora de Modo de Cálculo Automático ou CAM de projecção Manual estão seleccionados. O Limite é usado ao testar o CAM. Nota: Esta configuração apenas pode ser alterada por usuários de nível 2. Mestre Virtual do Regulador: NNN,Nmm Base Pos. Neg. Escravo Físico do Regulador 1: NNN,Nmm O O Escravo Físico do Regulador 2: NNN,Nmm O O
7.5.1 DESCRIÇÃO TÉCNICA DA UNIDADE REGULADORA
Os servomotores dos Reguladores 1 e 2 estão equipados com codificadores Absolutos que precisam de base tudo em um. A unidade reguladora é na realidade um eixo Servo Virtual (Unidade Reguladora). O servomotor 1 do Regulador (Regulador 1) e o servomotor 2 do Regulador (Regulador 2) estão ligados por software à unidade Reguladora. Isso faz da unidade Reguladora o mestre para o Regulador 1 e o Regulador 2. Quando iniciar a unidade Reguladora em modo de produção, o seguinte é feito:
• Se os Reguladores 1 e 2 não tiverem a mesma posição exacta, o Regulador 2 é deslocado para a mesma posição que o Regulador 1.
• A ligação por software é activada.
• A Unidade Reguladora é deslocada para a posição Inicial.
• A unidade reguladora inicia a sincronização com a Máquina. Ao deslocar com a unidade Reguladora, a ligação está activada aos Reguladores 1 e 2.
Importante: Com a explicação acima em mente, é importante que os Reguladores 1 e 2 tenham a mesma posição física exacta (Deve ser medida) quando a posição Inicial for configurada.
7.5.2 IMPORTANTE: SE OS SERVOMOTORES TIVEREM SIDO DESMANTELADOS
Se um ou ambos os Servomotores tiverem sido desmantelados, uma nova base deve ser configurada pelo departamento de Manutenção. Siga o procedimento abaixo.
7.5.3 BASEAR A UNIDADE REGULADORA
• Desloque os Reguladores 1 e 2 para a mesma posição física a 100%.
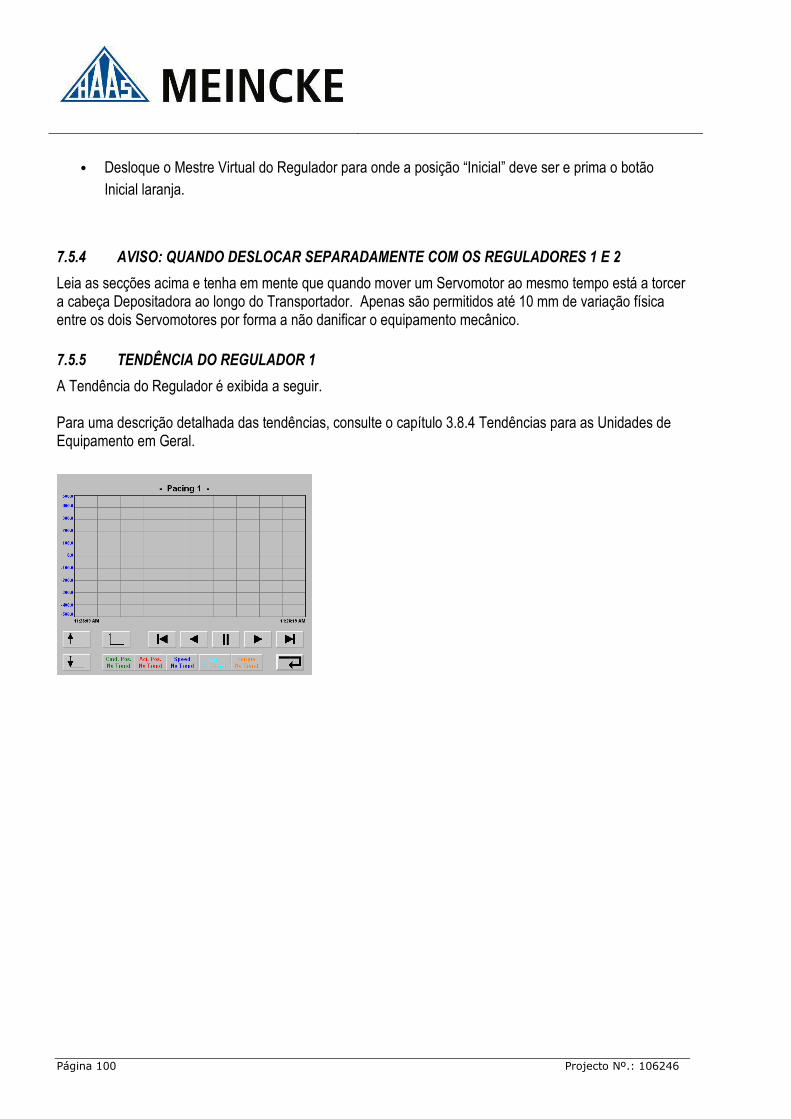
Página 100 Projecto Nº.: 106246
• Desloque o Mestre Virtual do Regulador para onde a posição “Inicial” deve ser e prima o botão Inicial laranja.
7.5.4 AVISO: QUANDO DESLOCAR SEPARADAMENTE COM OS REGULADORES 1 E 2
Leia as secções acima e tenha em mente que quando mover um Servomotor ao mesmo tempo está a torcer a cabeça Depositadora ao longo do Transportador. Apenas são permitidos até 10 mm de variação física entre os dois Servomotores por forma a não danificar o equipamento mecânico.
7.5.5 TENDÊNCIA DO REGULADOR 1
A Tendência do Regulador é exibida a seguir. Para uma descrição detalhada das tendências, consulte o capítulo 3.8.4 Tendências para as Unidades de Equipamento em Geral.
Projecto Nº: 106246 Página 101
7.5.6 TENDÊNCIA DO REGULADOR 2
A Tendência do Regulador 2 é exibida a seguir. Para uma descrição detalhada das tendências, consulte o capítulo 3.8.4 Tendências para as Unidades de Equipamento em Geral.

Página 102 Projecto Nº.: 106246
7.6 MANUAL
No modo Manual é possível movimentar para a frente e para trás com a unidade Reguladora. Consulte também o capítulo Manual para mais informação sobre a operação manual em geral.
A velocidade de Deslocação pode ser introduzida com uma gama de 0 a 10 mm/Seg.
Prima este botão para Deslocar a unidade Reguladora para a frente
Prima este botão para Deslocar a unidade Reguladora para trás
A posição Actual da unidade Reguladora é exibida.
7.7 INFORMAÇÕES DA MÁQUINA
Velocidade da máquina limitada pelo Regulador A velocidade da Máquina introduzida é superior à máxima para a unidade Reguladora. A mover o Regulador para a posição de paragem A unidade Reguladora está a ser movida para a respectiva posição de paragem. Nenhum modo do Regulador selecionado A informação da Máquina anterior será exibida se o operador estiver a tentar dar início ao Regulador e esta unidade não estiver seleccionada. Erro do Regulador A informação da Máquina anterior será exibida porque há uma falha geral no Regulador. Veja abaixo a secção Alarmes para a Unidade para mais informações. Interruptor de limite mín. do regulador 1 activado O Regulador 1 excedeu o limite mínimo. Diminua a velocidade, Aceleração ou comprimento Regulador por forma a evitar que isso aconteça de novo. Prima o botão Int.+ para deslocar o Regulador 1 acima do limite mínimo e depois inicie o Regulador de novo. Interruptor de limite máx. do regulador 1 activado O Regulador 1 excedeu o limite máximo. Diminua a velocidade, Aceleração ou comprimento Regulador por forma a evitar que isso aconteça de novo.

Projecto Nº: 106246 Página 103
Prima o botão Int.+ para deslocar o Regulador 1 para longe do limite máximo e depois inicie o Regulador de novo. Interruptor de de limite mín. do regulador 2 activado O Regulador 2 excedeu o limite mínimo. Diminua a velocidade, Aceleração ou comprimento Regulador por forma a evitar que isso aconteça de novo. Prima o botão Int.+ para deslocar o Regulador 2 acima do limite mínimo e depois inicie o Regulador de novo. Interruptor de limite máx. do regulador 2 activado O Regulador 2 excedeu o limite máximo. Diminua a velocidade, Aceleração ou comprimento Regulador por forma a evitar que isso aconteça de novo. Prima o botão Int.+ para deslocar o Regulador 2 para longe do limite máximo e depois inicie o Regulador de novo.
Página 104 Projecto Nº.: 106246
7.8 ALARMES
Alarme 161 O Disjuntor do Regulador desengatou Acção: Verifique o disjuntor do circuito e reinicie Alarme 162 Falha do eixo do servo no Regulador 1 Acção: Verifique os bujões e o controlador servo no servomotor e reinicie Alarme 163 Falha do eixo do servo no Regulador 2 Acção: Verifique os bujões e o controlador do servo no servomotor e reinicie os Alarmes do Servo
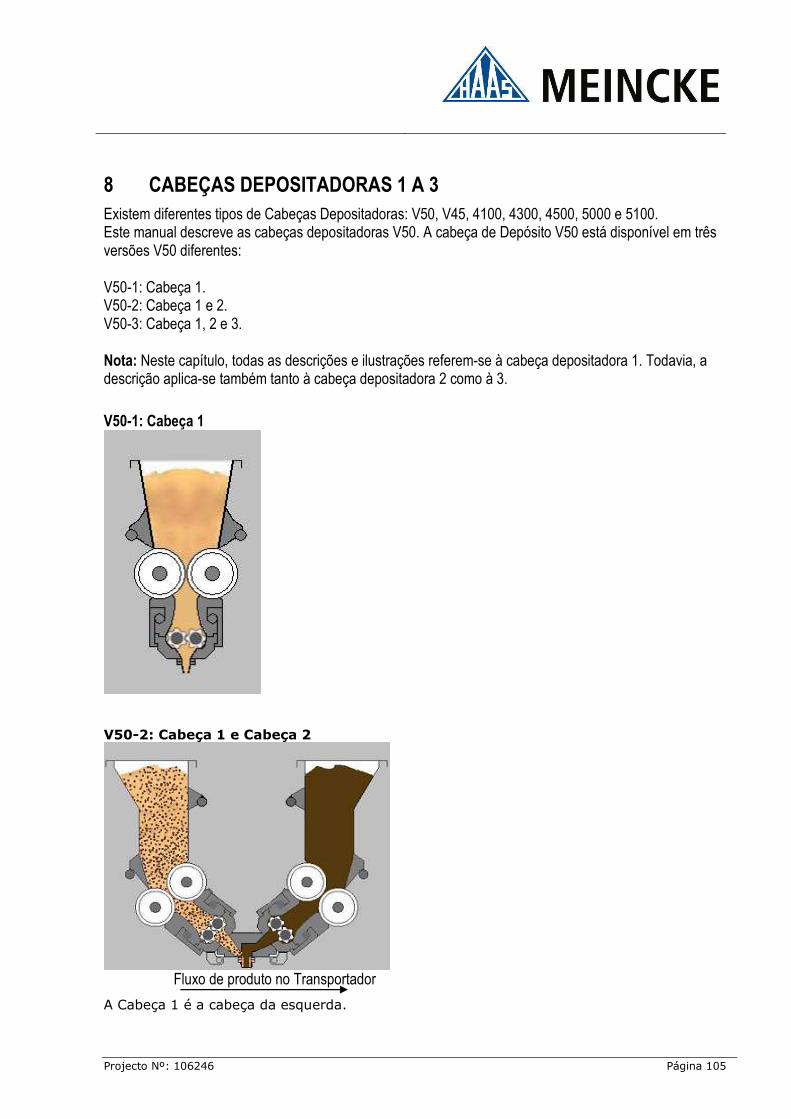
Projecto Nº: 106246 Página 105
8 CABEÇAS DEPOSITADORAS 1 A 3 Existem diferentes tipos de Cabeças Depositadoras: V50, V45, 4100, 4300, 4500, 5000 e 5100. Este manual descreve as cabeças depositadoras V50. A cabeça de Depósito V50 está disponível em três versões V50 diferentes: V50-1: Cabeça 1. V50-2: Cabeça 1 e 2. V50-3: Cabeça 1, 2 e 3. Nota: Neste capítulo, todas as descrições e ilustrações referem-se à cabeça depositadora 1. Todavia, a descrição aplica-se também tanto à cabeça depositadora 2 como à 3.
V50-1: Cabeça 1
V50-2: Cabeça 1 e Cabeça 2
Fluxo de produto no Transportador
A Cabeça 1 é a cabeça da esquerda.

Página 106 Projecto Nº.: 106246
V50-3: Cabeça 1, Cabeça 2 e Cabeça 3
Fluxo de produto no Transportador
A Cabeça 1 é a cabeça da esquerda, a Cabeça 2 a da direita e a Cabeça 3 a central.
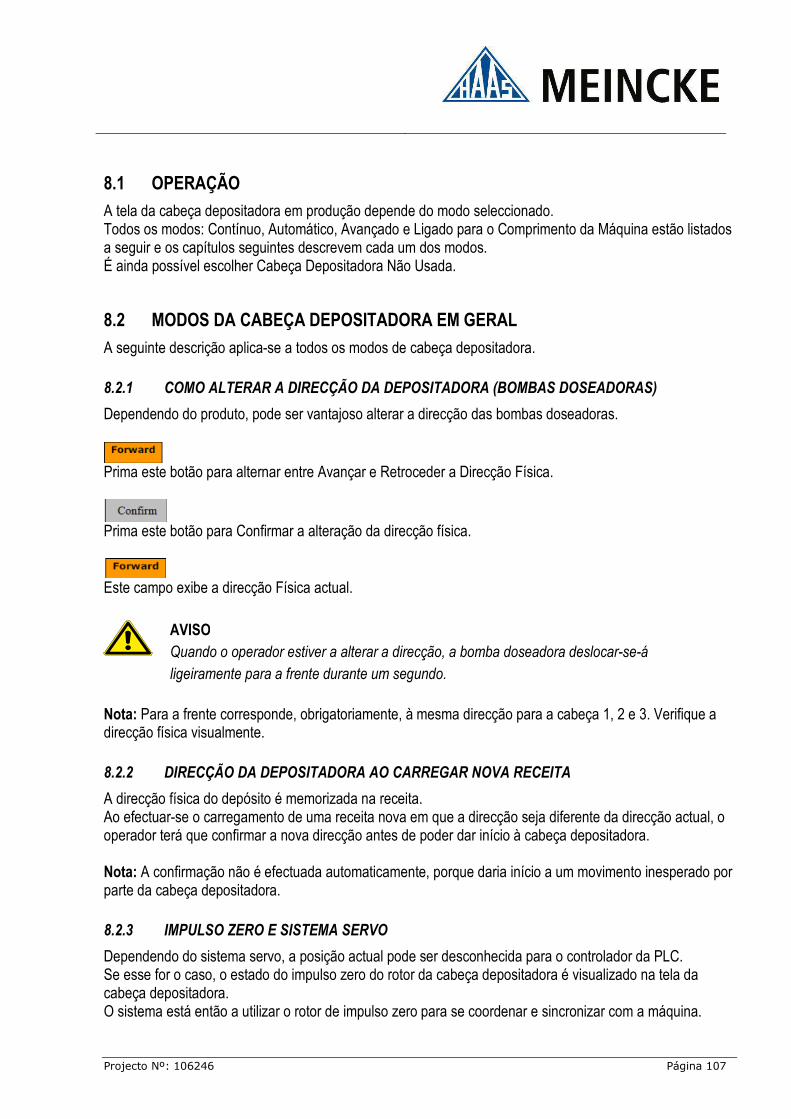
Projecto Nº: 106246 Página 107
8.1 OPERAÇÃO
A tela da cabeça depositadora em produção depende do modo seleccionado. Todos os modos: Contínuo, Automático, Avançado e Ligado para o Comprimento da Máquina estão listados a seguir e os capítulos seguintes descrevem cada um dos modos. É ainda possível escolher Cabeça Depositadora Não Usada.
8.2 MODOS DA CABEÇA DEPOSITADORA EM GERAL
A seguinte descrição aplica-se a todos os modos de cabeça depositadora.
8.2.1 COMO ALTERAR A DIRECÇÃO DA DEPOSITADORA (BOMBAS DOSEADORAS)
Dependendo do produto, pode ser vantajoso alterar a direcção das bombas doseadoras.
Prima este botão para alternar entre Avançar e Retroceder a Direcção Física.
Prima este botão para Confirmar a alteração da direcção física.
Este campo exibe a direcção Física actual.
AVISO Quando o operador estiver a alterar a direcção, a bomba doseadora deslocar-se-á
ligeiramente para a frente durante um segundo.
Nota: Para a frente corresponde, obrigatoriamente, à mesma direcção para a cabeça 1, 2 e 3. Verifique a direcção física visualmente.
8.2.2 DIRECÇÃO DA DEPOSITADORA AO CARREGAR NOVA RECEITA
A direcção física do depósito é memorizada na receita. Ao efectuar-se o carregamento de uma receita nova em que a direcção seja diferente da direcção actual, o operador terá que confirmar a nova direcção antes de poder dar início à cabeça depositadora. Nota: A confirmação não é efectuada automaticamente, porque daria início a um movimento inesperado por parte da cabeça depositadora.
8.2.3 IMPULSO ZERO E SISTEMA SERVO
Dependendo do sistema servo, a posição actual pode ser desconhecida para o controlador da PLC. Se esse for o caso, o estado do impulso zero do rotor da cabeça depositadora é visualizado na tela da cabeça depositadora. O sistema está então a utilizar o rotor de impulso zero para se coordenar e sincronizar com a máquina.
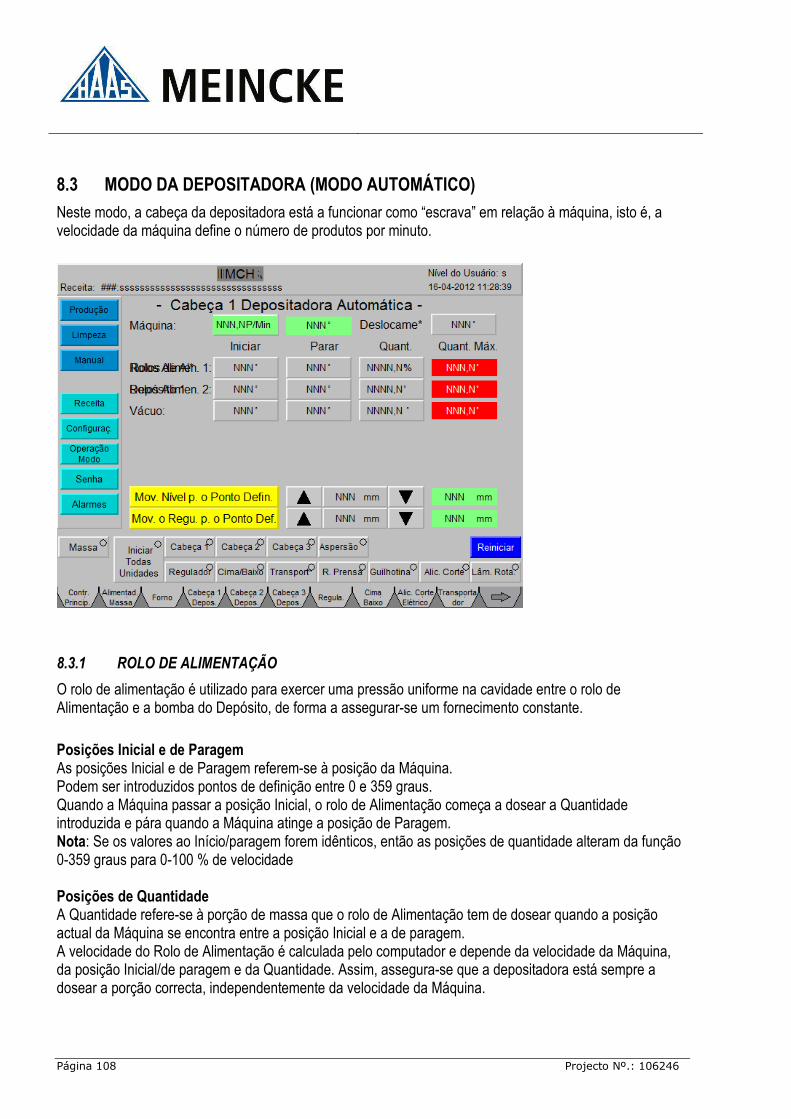
Página 108 Projecto Nº.: 106246
8.3 MODO DA DEPOSITADORA (MODO AUTOMÁTICO)
Neste modo, a cabeça da depositadora está a funcionar como “escrava” em relação à máquina, isto é, a velocidade da máquina define o número de produtos por minuto.
8.3.1 ROLO DE ALIMENTAÇÃO
O rolo de alimentação é utilizado para exercer uma pressão uniforme na cavidade entre o rolo de Alimentação e a bomba do Depósito, de forma a assegurar-se um fornecimento constante.
Posições Inicial e de Paragem As posições Inicial e de Paragem referem-se à posição da Máquina. Podem ser introduzidos pontos de definição entre 0 e 359 graus. Quando a Máquina passar a posição Inicial, o rolo de Alimentação começa a dosear a Quantidade introduzida e pára quando a Máquina atinge a posição de Paragem. Nota: Se os valores ao Início/paragem forem idênticos, então as posições de quantidade alteram da função 0-359 graus para 0-100 % de velocidade Posições de Quantidade A Quantidade refere-se à porção de massa que o rolo de Alimentação tem de dosear quando a posição actual da Máquina se encontra entre a posição Inicial e a de paragem. A velocidade do Rolo de Alimentação é calculada pelo computador e depende da velocidade da Máquina, da posição Inicial/de paragem e da Quantidade. Assim, assegura-se que a depositadora está sempre a dosear a porção correcta, independentemente da velocidade da Máquina.
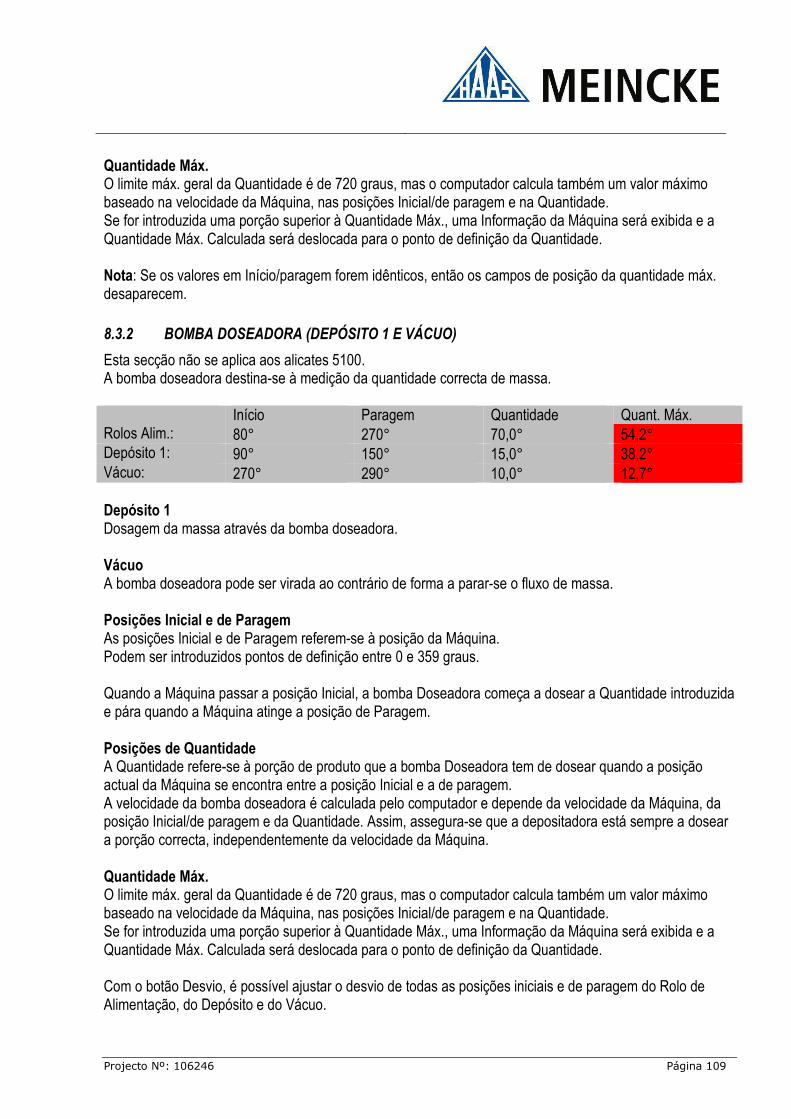
Projecto Nº: 106246 Página 109
Quantidade Máx. O limite máx. geral da Quantidade é de 720 graus, mas o computador calcula também um valor máximo baseado na velocidade da Máquina, nas posições Inicial/de paragem e na Quantidade. Se for introduzida uma porção superior à Quantidade Máx., uma Informação da Máquina será exibida e a Quantidade Máx. Calculada será deslocada para o ponto de definição da Quantidade. Nota: Se os valores em Início/paragem forem idênticos, então os campos de posição da quantidade máx. desaparecem.
8.3.2 BOMBA DOSEADORA (DEPÓSITO 1 E VÁCUO)
Esta secção não se aplica aos alicates 5100. A bomba doseadora destina-se à medição da quantidade correcta de massa. Início Paragem Quantidade Quant. Máx. Rolos Alim.: 80° 270° 70,0° 54,2° Depósito 1: 90° 150° 15,0° 38,2° Vácuo: 270° 290° 10,0° 12,7° Depósito 1 Dosagem da massa através da bomba doseadora. Vácuo A bomba doseadora pode ser virada ao contrário de forma a parar-se o fluxo de massa. Posições Inicial e de Paragem As posições Inicial e de Paragem referem-se à posição da Máquina. Podem ser introduzidos pontos de definição entre 0 e 359 graus. Quando a Máquina passar a posição Inicial, a bomba Doseadora começa a dosear a Quantidade introduzida e pára quando a Máquina atinge a posição de Paragem. Posições de Quantidade A Quantidade refere-se à porção de produto que a bomba Doseadora tem de dosear quando a posição actual da Máquina se encontra entre a posição Inicial e a de paragem. A velocidade da bomba doseadora é calculada pelo computador e depende da velocidade da Máquina, da posição Inicial/de paragem e da Quantidade. Assim, assegura-se que a depositadora está sempre a dosear a porção correcta, independentemente da velocidade da Máquina. Quantidade Máx. O limite máx. geral da Quantidade é de 720 graus, mas o computador calcula também um valor máximo baseado na velocidade da Máquina, nas posições Inicial/de paragem e na Quantidade. Se for introduzida uma porção superior à Quantidade Máx., uma Informação da Máquina será exibida e a Quantidade Máx. Calculada será deslocada para o ponto de definição da Quantidade. Com o botão Desvio, é possível ajustar o desvio de todas as posições iniciais e de paragem do Rolo de Alimentação, do Depósito e do Vácuo.

Página 110 Projecto Nº.: 106246
Exemplo: Introduzir -10 subtrairá 10 graus a todas as posições iniciais e de paragem da Cabeça da Depositadora 1. Introduzir 90 adicionará 90 graus a todas as posições iniciais e de paragem da Cabeça da Depositadora 1. A funcionalidade de desvio é utilizada para coordenar o depósito com outras unidades, tais como o Transportador de Elevação, o Regulador ou o Eixo Principal. Podem ser introduzidos valores de desvio entre -359 e 359 graus.
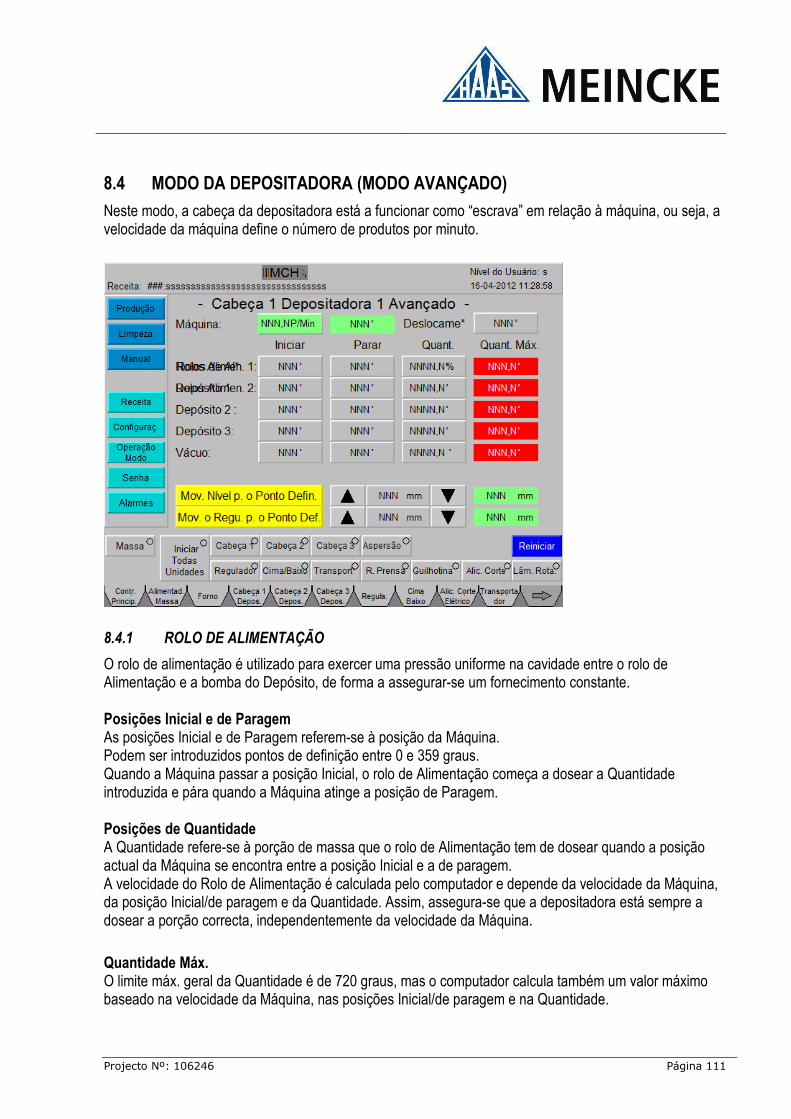
Projecto Nº: 106246 Página 111
8.4 MODO DA DEPOSITADORA (MODO AVANÇADO)
Neste modo, a cabeça da depositadora está a funcionar como “escrava” em relação à máquina, ou seja, a velocidade da máquina define o número de produtos por minuto.
8.4.1 ROLO DE ALIMENTAÇÃO
O rolo de alimentação é utilizado para exercer uma pressão uniforme na cavidade entre o rolo de Alimentação e a bomba do Depósito, de forma a assegurar-se um fornecimento constante. Posições Inicial e de Paragem As posições Inicial e de Paragem referem-se à posição da Máquina. Podem ser introduzidos pontos de definição entre 0 e 359 graus. Quando a Máquina passar a posição Inicial, o rolo de Alimentação começa a dosear a Quantidade introduzida e pára quando a Máquina atinge a posição de Paragem. Posições de Quantidade A Quantidade refere-se à porção de massa que o rolo de Alimentação tem de dosear quando a posição actual da Máquina se encontra entre a posição Inicial e a de paragem. A velocidade do Rolo de Alimentação é calculada pelo computador e depende da velocidade da Máquina, da posição Inicial/de paragem e da Quantidade. Assim, assegura-se que a depositadora está sempre a dosear a porção correcta, independentemente da velocidade da Máquina.
Quantidade Máx. O limite máx. geral da Quantidade é de 720 graus, mas o computador calcula também um valor máximo baseado na velocidade da Máquina, nas posições Inicial/de paragem e na Quantidade.

Página 112 Projecto Nº.: 106246
Se for introduzida uma porção superior à Quantidade Máx., uma Informação da Máquina será exibida e a Quantidade Máx. Calculada será deslocada para o ponto de definição da Quantidade.
8.4.2 BOMBA DOSEADORA (DEPÓSITO 1 A 3 E VÁCUO)
A bomba doseadora destina-se à medição da quantidade correcta de massa.
Início Paragem Quantidade Quant. Máx.
Rolos Alim.: 80° 270° 70,0° 54,2°
Depósito 1: 90° 150° 15,0° 38,2°
Depósito 2: 150° 210° 20,0° 38,2°
Depósito 3: 210° 270° 25,0° 38,2°
Vácuo: 270° 290° 10,0° 12,7°
Depósito 1 a 3 A dosagem da massa através da bomba doseadora pode ser dividida em 3, para que haja uma variação na forma do produto extrudado. Vácuo Para se parar o fluxo de massa, a bomba Doseadora pode ser invertida. Posições Inicial e de Paragem As posições Inicial e de Paragem referem-se à posição da Máquina. Podem ser introduzidos pontos de definição entre 0 e 359 graus. Quando a Máquina passar a posição Inicial, a bomba Doseadora começa a dosear a Quantidade introduzida e pára quando a Máquina atinge a posição de Paragem. Posições de Quantidade A Quantidade refere-se à porção de produto que a bomba Doseadora tem de dosear quando a posição actual da Máquina se encontra entre a posição Inicial e a de paragem. A velocidade da bomba doseadora é calculada pelo computador e depende da velocidade da Máquina, da posição Inicial/de paragem e da Quantidade. Assim, assegura-se que a depositadora está sempre a dosear a porção correcta, independentemente da velocidade da Máquina. Quantidade Máx. O limite máx. geral da Quantidade é de 720 graus, mas o computador calcula também um valor máximo baseado na velocidade da Máquina, nas posições Inicial/de paragem e na Quantidade. Se for introduzida uma porção superior à Quantidade Máx., uma Informação da Máquina será exibida e a Quantidade Máx. Calculada será deslocada para o ponto de definição da Quantidade.
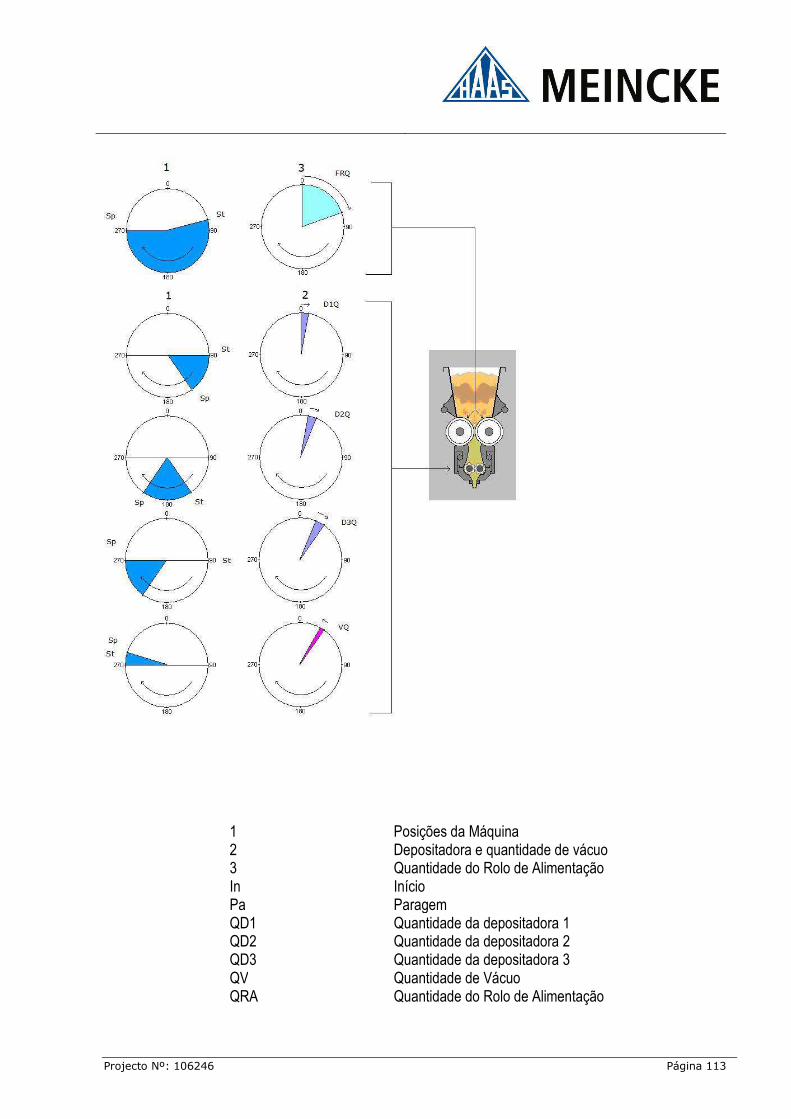
Projecto Nº: 106246 Página 113
1 Posições da Máquina 2 Depositadora e quantidade de vácuo 3 Quantidade do Rolo de Alimentação In Início Pa Paragem QD1 Quantidade da depositadora 1 QD2 Quantidade da depositadora 2 QD3 Quantidade da depositadora 3 QV Quantidade de Vácuo QRA Quantidade do Rolo de Alimentação
Página 114 Projecto Nº.: 106246
Desvio Com o botão Desvio, é possível ajustar o desvio de todas as posições iniciais e de paragem do rolo de Alimentação, do Depósito 1 a 3 e do Vácuo. Exemplo: Introduzir -10 subtrairá 10 graus a todas as posições iniciais e de paragem da Cabeça da Depositadora 1. Introduzir 90 adicionará 90 graus a todas as posições iniciais e de paragem da Cabeça da Depositadora 1. A funcionalidade de desvio é utilizada para coordenar o depósito com outras unidades, tais como o Transportador de Elevação, o Regulador ou o Eixo Principal. Podem ser introduzidos valores de desvio entre -359 e 359 graus.
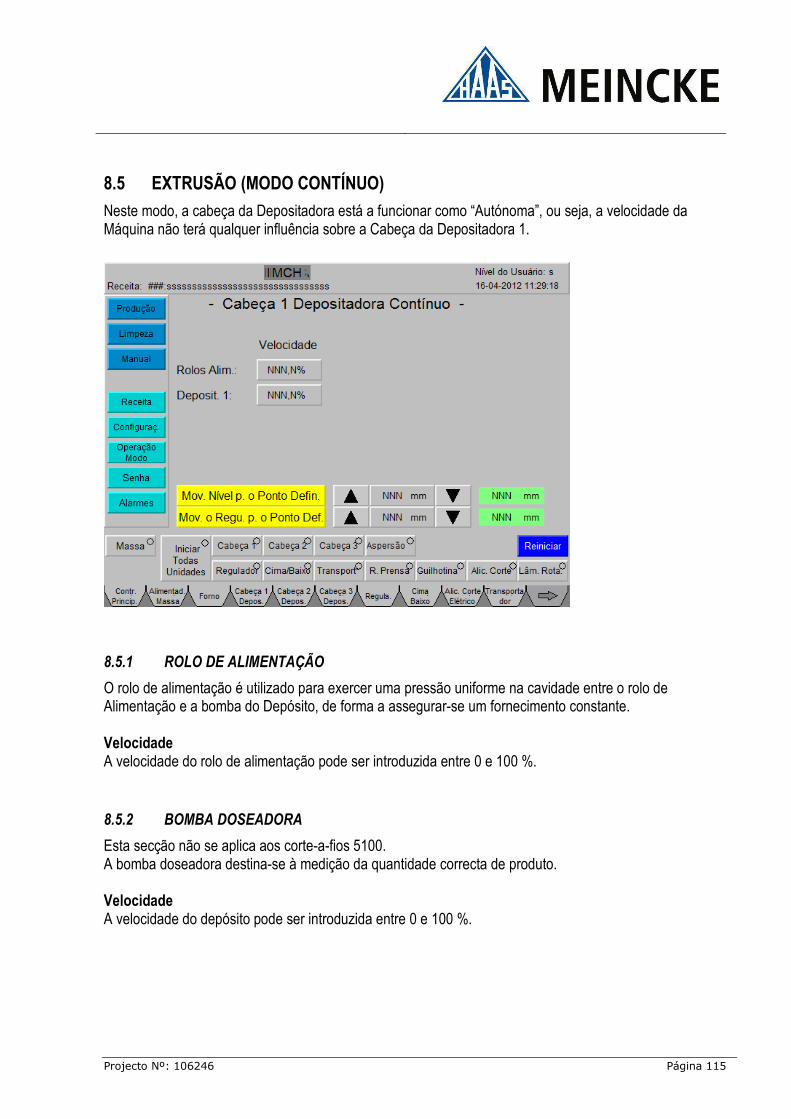
Projecto Nº: 106246 Página 115
8.5 EXTRUSÃO (MODO CONTÍNUO)
Neste modo, a cabeça da Depositadora está a funcionar como “Autónoma”, ou seja, a velocidade da Máquina não terá qualquer influência sobre a Cabeça da Depositadora 1.
8.5.1 ROLO DE ALIMENTAÇÃO
O rolo de alimentação é utilizado para exercer uma pressão uniforme na cavidade entre o rolo de Alimentação e a bomba do Depósito, de forma a assegurar-se um fornecimento constante. Velocidade A velocidade do rolo de alimentação pode ser introduzida entre 0 e 100 %.
8.5.2 BOMBA DOSEADORA
Esta secção não se aplica aos corte-a-fios 5100. A bomba doseadora destina-se à medição da quantidade correcta de produto. Velocidade A velocidade do depósito pode ser introduzida entre 0 e 100 %.

Página 116 Projecto Nº.: 106246
8.6 MODO DEPOSITADORA (LIGADO À MÁQUINA)
Neste modo, a cabeça depositadora está ligada à máquina. A ligação é calculada de acordo com a quantidade de produto introduzida. Produto. Representa quantos graus deve o rolo de alimentação ou a depositadora mover-se para 1 produto (0-360º da posição da máquina). Este modo é uma alternativa ao modo contínuo. Ambos os modos são modos de extrusão mas a diferença é que se a velocidade da máquina, neste modo, for alterada, o tamanho do produto permanecerá o mesmo.
8.6.1 VELOCIDADE DO ROLO DE ALIMENTAÇÃO [º/P]
A quantidade do rolo de alimentação pode ser introduzida com uma gama de 0 a 360º/produto. Por exemplo: Introduzir 100º/P irá fornecer uma quantidade de 100 º à bomba doseadora por cada produto.
8.6.2 VELOCIDADE DA DEPOSITADORA [º/P]
A quantidade da depositadora pode ser introduzida com uma gama de 0 a 360 º/produto. Por exemplo: Introduzir 120º/P irá fornecer uma quantidade de 120 º de massa por cada produto.

Projecto Nº: 106246 Página 117
8.7 CONFIGURAÇÕES
Evoluç. do Rolo de Alim.
Com este botão pode aceder à Tela com a Tendência do Rolo de Alimentação. Evolução da Depositadora
Com este botão pode aceder à Tela com a Tendência da Depositadora (bomba Doseadora).
8.7.1 MOVIMENTO PARA A BASE DA BOMBA DOSEADORA
A posição da bomba doseadora é importante para se conseguir deslocar a caixa da bomba para dentro e para fora da cabeça da depositadora. Esta posição é a posição de paragem. Veja como pode deslocar a Bomba Doseadora Para a Posição de paragem no capítulo 8.8 Limpeza. É, portanto, necessário determinar a “Posição de Base”. Desloque a Bomba Doseadora (Depositadora) para a posição onde é possível inserir e retirar a caixa da Bomba com os botões Int.+ e Int-. Base Accione este botão para configurar a posição de Base na posição actual da Bomba Doseadora.

Página 118 Projecto Nº.: 106246
A posição actual será configurada para 0,0˚. Nota: O Codificador do Servomotor utilizado para a Bomba Doseadora é um “Codificador Completo”. Isso significa que a posição de Base é memorizada no Codificador e uma falha de energia não pode apagar a Posição de Base. Nota: Só é permitido a Usuários de nível 2 aceder à Bomba Doseadora de Base.
8.7.2 BLOQUEIO EXCÊNTRICO NA CAIXA DA BOMBA
Para se assegurar de que a caixa da bomba está correctamente montada na cabeça de depósito, estão instalados dois sensores na cabeça de depósito. O painel de operação verifica se ambos os sensores estão ligados e a Cabeça da Depositadora 1 não será iniciada até ao sinal de ambos os sensores de Bloqueio. Premindo o botão Desactivado, os sensores de bloqueio excêntrico podem ser activados ou desactivados. Desactive os sensores de bloqueio excêntrico aquando da produção com placas de injecção para depositadora/extrusora Tipo 4100.
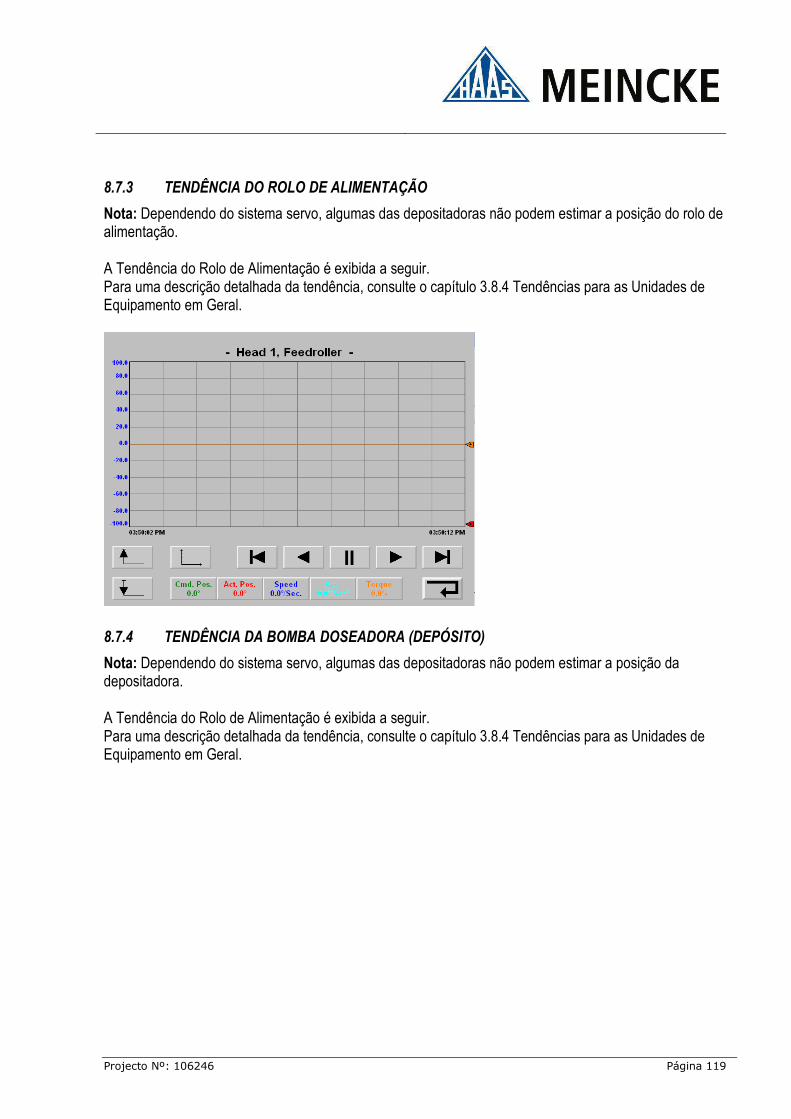
Projecto Nº: 106246 Página 119
8.7.3 TENDÊNCIA DO ROLO DE ALIMENTAÇÃO
Nota: Dependendo do sistema servo, algumas das depositadoras não podem estimar a posição do rolo de alimentação. A Tendência do Rolo de Alimentação é exibida a seguir. Para uma descrição detalhada da tendência, consulte o capítulo 3.8.4 Tendências para as Unidades de Equipamento em Geral.
8.7.4 TENDÊNCIA DA BOMBA DOSEADORA (DEPÓSITO)
Nota: Dependendo do sistema servo, algumas das depositadoras não podem estimar a posição da depositadora. A Tendência do Rolo de Alimentação é exibida a seguir. Para uma descrição detalhada da tendência, consulte o capítulo 3.8.4 Tendências para as Unidades de Equipamento em Geral.
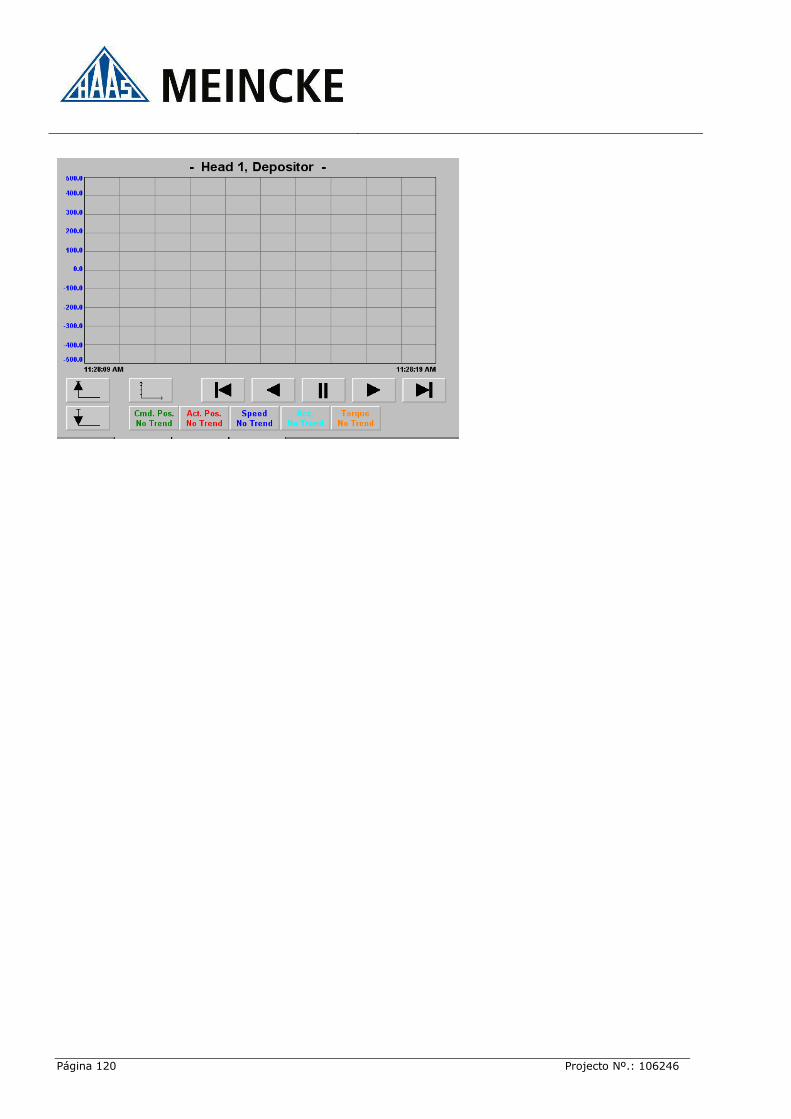
Página 120 Projecto Nº.: 106246
Projecto Nº: 106246 Página 121
8.8 LIMPEZA
No modo limpeza, é possível iniciar e parar a cabeça 1 para limpeza das cabeças da depositadora. Para além disso, a Bomba Doseadora pode ser movida para a Posição de Paragem. A posição de paragem refere-se à posição em que a caixa da bomba pode ser removida e colocada. Consulte também o capítulo 3.6

Página 122 Projecto Nº.: 106246
Limpeza para mais informações sobre a operação de limpeza em geral.
Head 1 Prima este botão para Iniciar/Parar o rolo de Alimentação e a Bomba Doseadora.
A velocidade do rolo de Alimentação pode ser introduzida com uma gama de 0 a 30% da velocidade máxima.
A velocidade da Bomba Doseadora pode ser introduzida com uma gama de 0 a 30% da velocidade máxima. Head 1 Prima este botão para Iniciar/Parar o rolo de Alimentação e a Bomba Doseadora. Pos. Stop Prima este botão para deslocar a Bomba Doseadora para a Posição de Paragem.
A posição Actual da bomba Doseadora é exibida.
Projecto Nº: 106246 Página 123
8.9 MANUAL
No modo Manual, é possível movimentar para a frente e para trás o rolo de Alimentação e a Bomba Doseadora. Consulte igualmente o capítulo 3.7. Manual para mais informação sobre a operação manual em geral.
8.9.1 ROLO DE ALIMENTAÇÃO
A velocidade de Deslocação pode ser introduzida com uma gama de 0 a 30% da velocidade máxima.
Prima este botão para Deslocar o rolo de Alimentação para a frente.
Prima este botão para Deslocar o rolo de Alimentação para trás.
A posição Actual do rolo de Alimentação é exibida.
8.9.2 BOMBA DOSEADORA
A velocidade de Deslocação pode ser introduzida com uma gama de 0 a 30% da velocidade máxima.
Prima este botão para deslocar a Bomba Doseadora para a frente
Prima este botão para deslocar a Bomba Doseadora para trás
A posição Actual da bomba Doseadora é exibida.

Página 124 Projecto Nº.: 106246
8.10 INFORMAÇÕES DA MÁQUINA
Reduzir quantidade do Rolo de Alimentação e da Cabeça da Depositadora 1
Receita 6: Teste HAAS-MEINCKE Nível do usuário 3
Produção Receita Limpeza Manual Configurações Oper. Modo As Informações da Máquina que se seguem referem-se à Cabeça da Depositadora 1. Bloqueio excêntrico na caixa da bomba não bloqueado Se o Operador estiver a tentar iniciar a Cabeça da Depositadora com os bloqueios excêntricos fechados, a informação da Máquina acima indicada será exibida e a tela de Controlo Principal será exibida automaticamente. O bloqueio excêntrico na tela Depositadora 1 pode ser observado na tela Controlo Principal. A luz verde indica que o bloqueio Excêntrico está bloqueado e a luz vermelha, que o bloqueio excêntrico está desbloqueado. A cabeça depositadora não pode ser iniciada se os bloqueios Excêntricos não estiverem bloqueados. Reduzir quantidade do Rolo de Alimentação da Cabeça Depositadora 1 A informação da Máquina acima indicada será exibida se a Quantidade for superior à Quantidade Máx. A Quantidade Máx. é calculada pelo computador e depende da velocidade actual da Máquina e da velocidade Máxima do Rolo de alimentação. Reduzir quantidade do Depósito 1 da Cabeça Depositadora 1 A informação da Máquina acima indicada será exibida se a Quantidade for superior à Quantidade Máx. A Quantidade Máx. é calculada pelo computador e depende da velocidade actual da Máquina e da velocidade Máxima da Depositadora. Reduzir quantidade do Depósito 2 da Cabeça Depositadora 1 A informação da Máquina acima indicada será exibida se a Quantidade for superior à Quantidade Máx. A Quantidade Máx. é calculada pelo computador e depende da velocidade actual da Máquina e da velocidade Máxima da Depositadora. Reduzir quantidade do Depósito 3 da Cabeça Depositadora 1 A informação da Máquina acima indicada será exibida se a Quantidade for superior à Quantidade Máx. A Quantidade Máx. é calculada pelo computador e depende da velocidade actual da Máquina e da velocidade Máxima da Depositadora. Reduzir a quantidade do Vácuo da Cabeça Depositadora 1 A informação da Máquina acima indicada será exibida se a Quantidade for superior à Quantidade Máx. A Quantidade Máx. é calculada pelo computador e depende da velocidade actual da Máquina e da velocidade Máxima da Depositadora.
Projecto Nº: 106246 Página 125
Sem modo DPH 1 seleccionado A informação da Máquina anterior será exibida se o operador estiver a tentar dar início à Cabeça da Depositadora e esta unidade não estiver seleccionada. Direcção do Depósito não está ok Esta Informação da Máquina será exibida se a direcção na receita carregada não corresponder à direcção actual do depósito. Vá até à tela da Cabeça Depositadora no modo de produção e altere a direcção do Depósito. Consulte o capítulo 8.2.1 Como alterar a direcção da Depositadora (Bombas doseadoras). Erro da Cabeça de Depósito 1 A informação da Máquina anterior será exibida pois há uma falha geral na Cabeça da Depositadora 1. Consulte o capítulo 8.11 Alarmes.
8.11 ALARMES
Os seguintes alarmes referem-se à Cabeça da Depositadora 1. Alarme 193 Falha do eixo do servo no Rolo de Alimentação 1 Acção: Verifique os bujões e o controlador servo no motor e reinicie Alarme 195 Falha do eixo do servo na Depositadora 1 Acção: Verifique os bujões e o controlador servo no motor e reinicie Alarme 196 Falha de ligação ao servomotor do Rolo de Alimentação 1 Acção: Verifique os bujões no servomotor e reinicie Alarme 197 Falha de ligação ao servomotor da Depositadora 1 Acção: Verifique os bujões no servomotor e reinicie Alarme 198 Detector de proximidade de paragem de posição do Rolo de Alimentação 1 não activado durante o funcionamento Acção: Verifique o detector de proximidade Alarme 199 Detector de proximidade de paragem de posição da Depositadora 1 não activado durante o funcionamento Acção: Verifique o detector de proximidade
Página 126 Projecto Nº.: 106246
Alarme 200 Falha no disjuntor do Rolo de Alimentação 1 Acção: Verifique o disjuntor do circuito e reinicie Alarme 201 Falha de conversor de frequência no Rolo de Alimentação 1 Acção: Verifique o conversor de frequência e reinicie Alarme 202 Falha no disjuntor da Depositadora 1 Acção: Verifique o disjuntor do circuito e reinicie Alarme 203 Falha do conversor de frequência na Depositadora 1 Acção: Verifique o conversor de frequência e reinicie

Projecto Nº: 106246 Página 127
9 ALICATE DE CORTE ELÉCTRICO O alicate de corte eléctrico é utilizado para cortar o produto extrudado da depositadora e tem a mesma função que o alicate de corte mecânico (opcional), sendo mais pequeno e com menor velocidade máxima.
9.1 OPERAÇÃO
O aspecto da tela do alicate de corte eléctrico em produção depende do modo seleccionado. Os modos de controlar o alicate de corte eléctrico estão listados abaixo e as seguintes secções descrevem cada modo. Nota: Se for seleccionado o modo de alicate de corte eléctrico ‘Não usado’, é possível desligar as fichas do Servomotor para o alicate de corte eléctrico.
9.2 ALICATE DE CORTE ELÉCTRICO NO GERAL
A seguinte descrição aplica-se a todos os modos do alicate de corte eléctrico. “Pos” do alicate de corte “Pos.” apresenta a posição actual do alicate de corte entre 0 e 360˚. “Velocidade” do alicate de corte “Velocidade” apresenta a velocidade actual do alicate de corte em CPM (Cortes por minuto). Direcção de Rotação Fisicamente, o alicate de corte eléctrico pode funcionar em ambas as direcções. Independentemente da direcção física em que o alicate de corte eléctrico está a funcionar, a posição actual na tela será sempre vista como ao movimentar-se na direcção positiva. Nota: De cada vez que a direcção do eixo principal é alterada, a configuração do sistema servo está a ser alterada (consulte 9.2.1 Como Alterar a Direcção do Alicate de Corte Eléctrico).
AVISO Quando o operador estiver a alterar a direcção, o alicate deslocar-se-á ligeiramente para a
frente durante um segundo.
9.2.1 COMO ALTERAR A DIRECÇÃO DO ALICATE DE CORTE ELÉCTRICO
Prima este botão para alternar entre Avançar e Retroceder a direcção física do alicate de corte eléctrico.
Prima este botão para Confirmar a alteração da direcção física do alicate de corte eléctrico.
Este campo exibe a direcção física actual do alicate de corte eléctrico.
Página 128 Projecto Nº.: 106246
9.2.2 DIRECÇÃO DO ALICATE DE CORTE ELÉCTRICO AO CARREGAR NOVA RECEITA
A direcção física do alicate de corte eléctrico é memorizada nas receitas. Quando uma receita em que a direcção do alicate de corte eléctrico é diferente da direcção actual quando a receita é carregada, a direcção do alicate de corte eléctrico na receita tem que ser confirmada antes do alicate ser iniciado. A confirmação não é efectuada automaticamente, porque daria início a um movimento inesperado por parte do alicate de corte eléctrico.
9.2.3 DESLOCAÇÃO COM O ALICATE DE CORTE ELÉCTRICO
Prima este botão para Deslocar o alicate de corte eléctrico para a frente.
Prima este botão para deslocar o alicate de corte eléctrico para trás. Nota: A velocidade de deslocação pode ser alterada no modo Manual.
9.2.4 IMPULSO ZERO E SISTEMA SERVO
Dependendo do sistema servo, a posição actual pode ser desconhecida para o controlador da PLC. Se assim for, o estado do impulso zero do alicate de corte eléctrico é então visualizado na tela do alicate de corte eléctrico pelo nome de Sensor, e o sistema utiliza o impulso zero do alicate de corte eléctrico para coordenação e sincronização com a máquina.
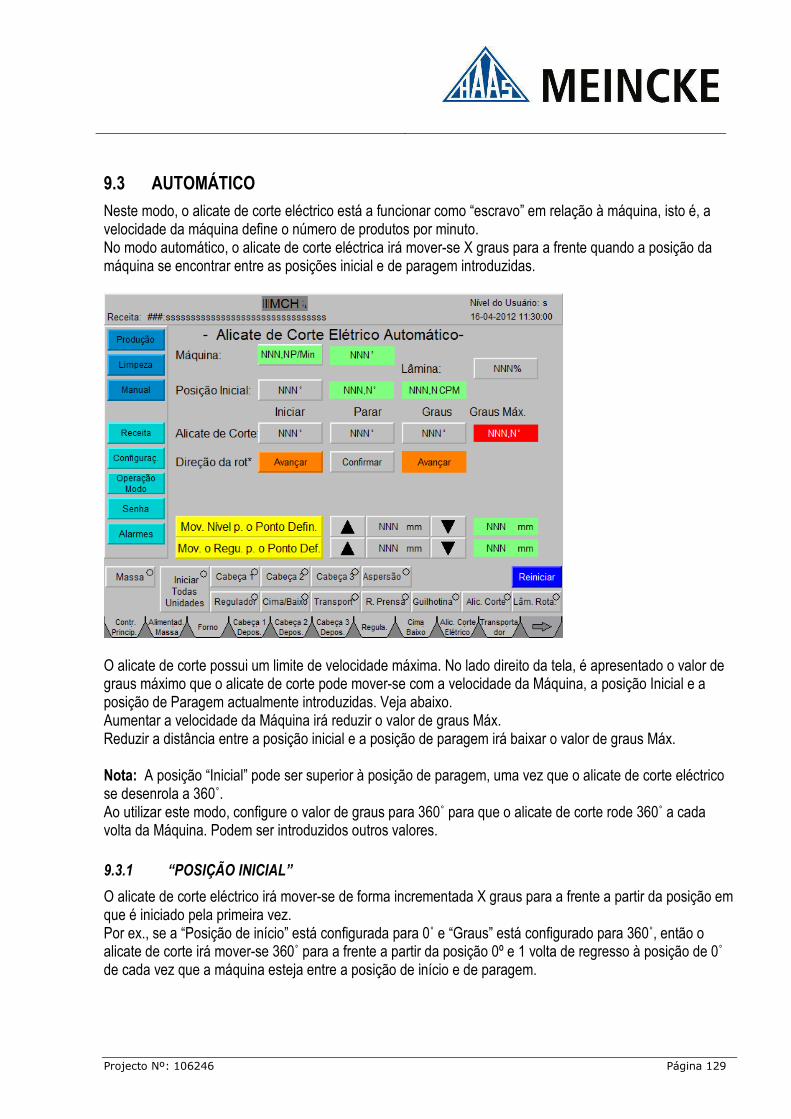
Projecto Nº: 106246 Página 129
9.3 AUTOMÁTICO
Neste modo, o alicate de corte eléctrico está a funcionar como “escravo” em relação à máquina, isto é, a velocidade da máquina define o número de produtos por minuto. No modo automático, o alicate de corte eléctrica irá mover-se X graus para a frente quando a posição da máquina se encontrar entre as posições inicial e de paragem introduzidas.
O alicate de corte possui um limite de velocidade máxima. No lado direito da tela, é apresentado o valor de graus máximo que o alicate de corte pode mover-se com a velocidade da Máquina, a posição Inicial e a posição de Paragem actualmente introduzidas. Veja abaixo. Aumentar a velocidade da Máquina irá reduzir o valor de graus Máx. Reduzir a distância entre a posição inicial e a posição de paragem irá baixar o valor de graus Máx. Nota: A posição “Inicial” pode ser superior à posição de paragem, uma vez que o alicate de corte eléctrico se desenrola a 360˚. Ao utilizar este modo, configure o valor de graus para 360˚ para que o alicate de corte rode 360˚ a cada volta da Máquina. Podem ser introduzidos outros valores.
9.3.1 “POSIÇÃO INICIAL”
O alicate de corte eléctrico irá mover-se de forma incrementada X graus para a frente a partir da posição em que é iniciado pela primeira vez. Por ex., se a “Posição de início” está configurada para 0˚ e “Graus” está configurado para 360˚, então o alicate de corte irá mover-se 360˚ para a frente a partir da posição 0º e 1 volta de regresso à posição de 0˚ de cada vez que a máquina esteja entre a posição de início e de paragem.

Página 130 Projecto Nº.: 106246
Por ex., se a “Posição de início” está configurada para 30˚ e “Graus” está configurado para 360˚, então o alicate de corte eléctrico irá mover-se 360˚ para a frente a partir da posição 30º e 1 volta de regresso à posição de 30˚ de cada vez que a máquina esteja entre a posição de início e de paragem.
9.3.2 “INICIAR ALICATE DE CORTE” E “PARAR ALICATE DE CORTE”:
“Iniciar alicate de corte” e “Parar alicate de corte” são utilizadas para a introdução do período de tempo em que o alicate de corte deve funcionar. Ou seja, o alicate de corte irá mover a respectiva distância de graus quando a posição da Máquina se encontrar entre as posições “Iniciar alicate de corte” e “Parar alicate de corte”. Por exemplo, se a velocidade da “Máquina” for configurada para 60 RPM, “Iniciar alicate de corte” para 100, “Parar alicate de corte” para 280˚ e “Graus” para 360˚, o alicate de corte irá mover-se 360˚ para a frente quando a posição da Máquina se encontrar entre 100˚ e 280˚ e será imobilizada quando a posição da Máquina se encontrar entre 280˚ e 100˚. A velocidade durante este período será de 720˚/Seg. = 120 CPM. De forma a manter a sincronização com a Máquina, o período de imobilização resulta numa elevada velocidade de corte que, uma vez mais, permite um corte rectilíneo da massa. Nota: A alteração da velocidade da Máquina irá aumentar a velocidade de corte.
9.3.3 “GRAUS DO ALICATE DE CORTE”
Utilize a predefinição para introduzir a distância que pretende que o alicate de corte se mova. Normalmente, para Automática, este valor será de 360˚.
9.3.4 “GRAUS MÁX. DO ALICATE DE CORTE”
O valor apresentado representa o valor máximo que pode ser introduzido em “Graus do alicate de corte”. O cálculo é baseado nos seguintes valores: Velocidade da Máquina, posições de início e paragem do Alicate de corte e a velocidade máxima para o Alicate de corte. Nota: Se o valor de “Graus de alicate de corte” for superior ao valor de graus máximo, será apresentado um aviso e o alicate de corte não será movido pelo valor introduzido de “Graus do alicate de corte”.
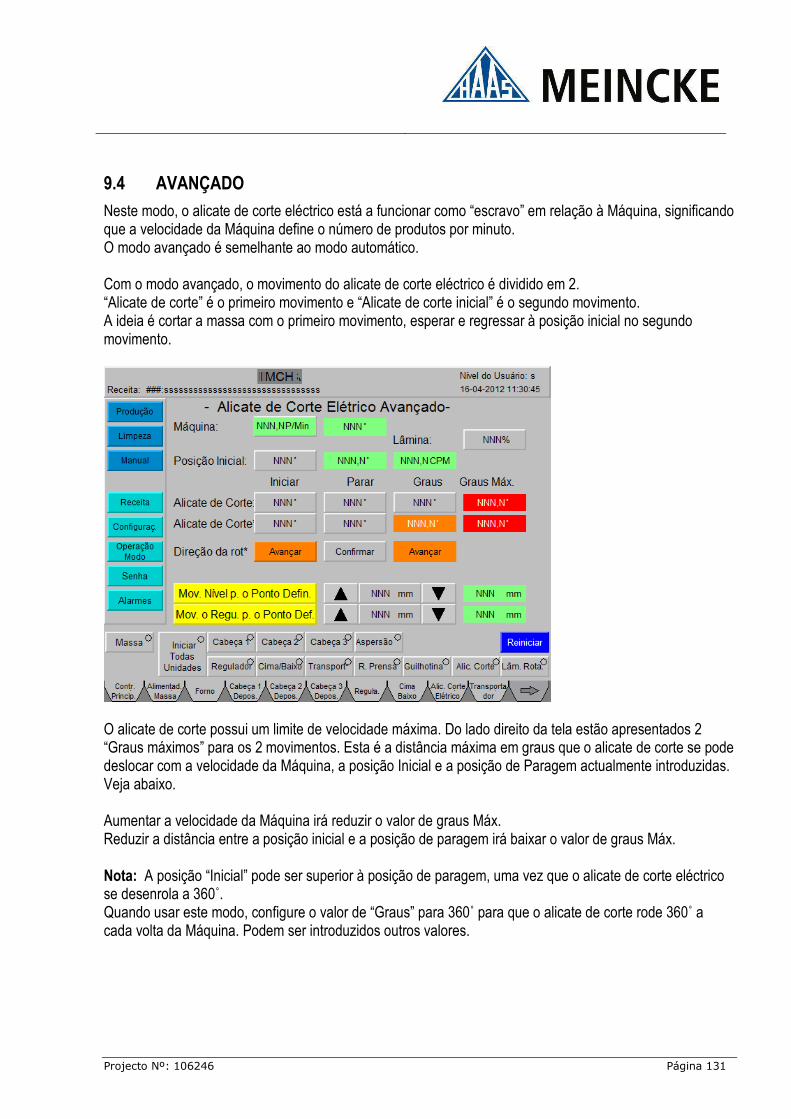
Projecto Nº: 106246 Página 131
9.4 AVANÇADO
Neste modo, o alicate de corte eléctrico está a funcionar como “escravo” em relação à Máquina, significando que a velocidade da Máquina define o número de produtos por minuto. O modo avançado é semelhante ao modo automático. Com o modo avançado, o movimento do alicate de corte eléctrico é dividido em 2. “Alicate de corte” é o primeiro movimento e “Alicate de corte inicial” é o segundo movimento. A ideia é cortar a massa com o primeiro movimento, esperar e regressar à posição inicial no segundo movimento.
O alicate de corte possui um limite de velocidade máxima. Do lado direito da tela estão apresentados 2 “Graus máximos” para os 2 movimentos. Esta é a distância máxima em graus que o alicate de corte se pode deslocar com a velocidade da Máquina, a posição Inicial e a posição de Paragem actualmente introduzidas. Veja abaixo. Aumentar a velocidade da Máquina irá reduzir o valor de graus Máx. Reduzir a distância entre a posição inicial e a posição de paragem irá baixar o valor de graus Máx. Nota: A posição “Inicial” pode ser superior à posição de paragem, uma vez que o alicate de corte eléctrico se desenrola a 360˚. Quando usar este modo, configure o valor de “Graus” para 360˚ para que o alicate de corte rode 360˚ a cada volta da Máquina. Podem ser introduzidos outros valores.

Página 132 Projecto Nº.: 106246
9.4.1 “POSIÇÃO INICIAL”
O alicate de corte eléctrico irá mover-se de forma incrementada X graus para a frente a partir da posição em que é iniciado pela primeira vez. Por ex., se a “Posição de início” está configurada para 0˚ e “Graus” está configurado para 360˚, então o alicate de corte irá mover-se 360˚ para a frente a partir da posição 0º e 1 volta de regress à posição de 0˚ de cada vez que a máquina esteja entre a posição de início e de paragem. Por ex., se a “Posição de início” está configurada para 30˚ e “Graus” está configurado para 360˚, então o alicate de corte eléctrico irá mover-se 360˚ para a frente a partir da posição 30º e 1 volta de regresso à posição de 30˚ de cada vez que a máquina esteja entre a posição de início e de paragem.
9.4.2 “INICIAR ALICATE DE CORTE” E “PARAR ALICATE DE CORTE”
Neste modo, o movimento do alicate de corte é dividido em 2. “Alicate de corte” é o primeiro movimento e “Alicate de corte inicial” é o segundo movimento. A ideia é cortar a massa com o primeiro movimento, esperar que o produto cai abaixo da posição do alicate de corte e depois regressar à posição inicial no segundo movimento. Iniciar e parar para “Alicate de corte” e “Alicate de corte inicial” são utilizados para a introduzir o período de tempo em que o alicate de corte deve funcionar. Ou seja, o alicate de corte irá mover a respectiva distância em graus quando a posição da Máquina se encontrar entre as posições iniciar e parar. Por exemplo:
• Velocidade da “máquina” está configurada para 60 RPM,
• “Início do alicate de corte” está configurado para 30 e “Paragem do alicate de corte” está configurado para 100˚
• ”Graus do alicate de corte inicial” está configurado para 160˚
• “Início do alicate de corte inicial” está configurado para 200 e “Paragem do alicate de corte incial” está configurado para 300˚
• “Graus do alicate de corte inicial” irá automaticamente ser calculado e configurado para 200˚ (360˚ - “Graus do alicate de corte”)
Os pontos de definição acima irão resultar no seguinte movimento. Posição da máquina entre 300˚ e 30˚: O alicate de corte está parado. Posição da máquina entre 30 e 100˚: Deslocar o Alicate de corte da posição 0˚ para 160˚ Posição da máquina entre 100˚ e 200˚: O alicate de corte está parado. Posição da máquina entre 200 e 300˚: Deslocar o Alicate de corte da posição 160˚ em rotação para a frente para 0˚ Nota: A alteração da velocidade da Máquina irá aumentar a velocidade de corte.
9.4.3 “GRAUS DO ALICATE DE CORTE” E “GRAUS INICIAIS DO ALICATE DE CORTE
Utilize a predefinição para introduzir a distância que pretende que o alicate de corte se mova.
9.4.4 “GRAUS MÁX. DO ALICATE DE CORTE”
O valor apresentado representa o valor máximo que pode ser introduzido em “Graus do alicate de corte”. O cálculo é baseado nos seguintes valores: Velocidade da máquina, posições de “Início do Alicate de corte” e

Projecto Nº: 106246 Página 133
“Paragem do Alicate de corte” ou posições “Início do alicate de corte inicial” e “Paragem do alicate de corte inicial” e na velocidade máxima para o alicate de corte. Nota: Se o valor de “Graus do alicate de corte” ou “Graus do alicate de corte inicial” for superior ao valor de graus máximo, será apresentado um aviso e o alicate de corte não será movido ao valor introduzido de “Graus Máx do alicate de corte”.
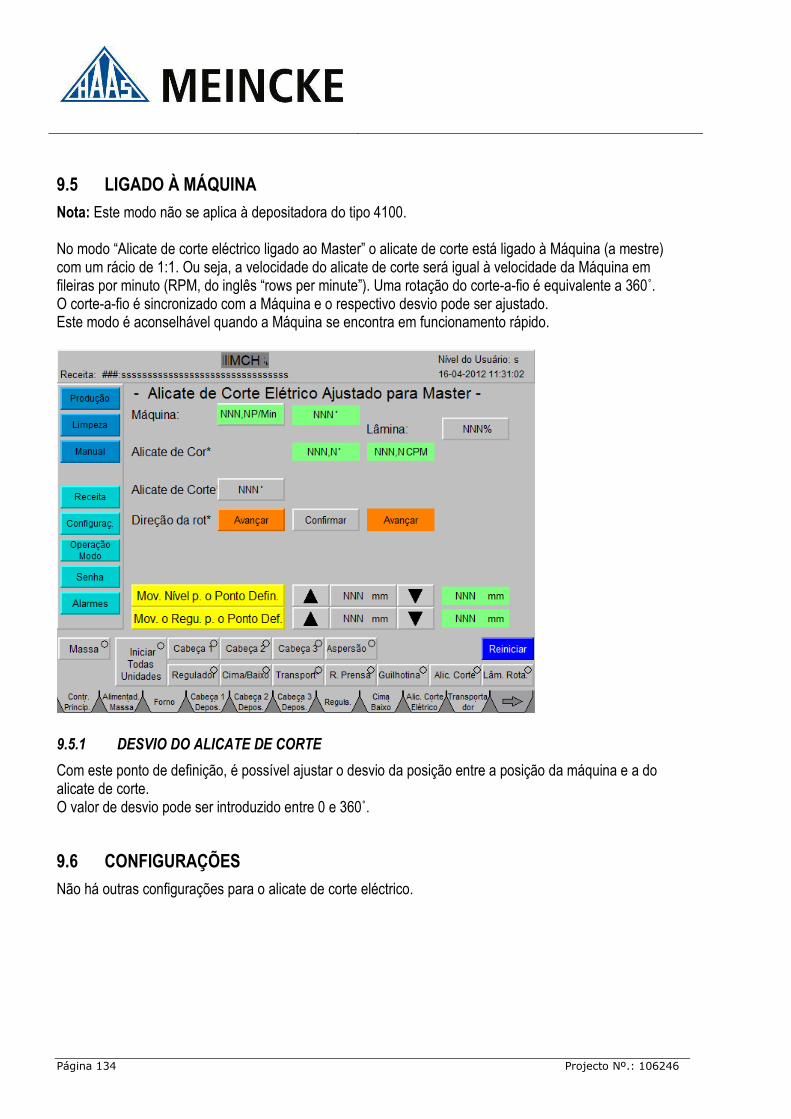
Página 134 Projecto Nº.: 106246
9.5 LIGADO À MÁQUINA
Nota: Este modo não se aplica à depositadora do tipo 4100. No modo “Alicate de corte eléctrico ligado ao Master” o alicate de corte está ligado à Máquina (a mestre) com um rácio de 1:1. Ou seja, a velocidade do alicate de corte será igual à velocidade da Máquina em fileiras por minuto (RPM, do inglês “rows per minute”). Uma rotação do corte-a-fio é equivalente a 360˚. O corte-a-fio é sincronizado com a Máquina e o respectivo desvio pode ser ajustado. Este modo é aconselhável quando a Máquina se encontra em funcionamento rápido.
9.5.1 DESVIO DO ALICATE DE CORTE
Com este ponto de definição, é possível ajustar o desvio da posição entre a posição da máquina e a do alicate de corte. O valor de desvio pode ser introduzido entre 0 e 360˚.
9.6 CONFIGURAÇÕES
Não há outras configurações para o alicate de corte eléctrico.
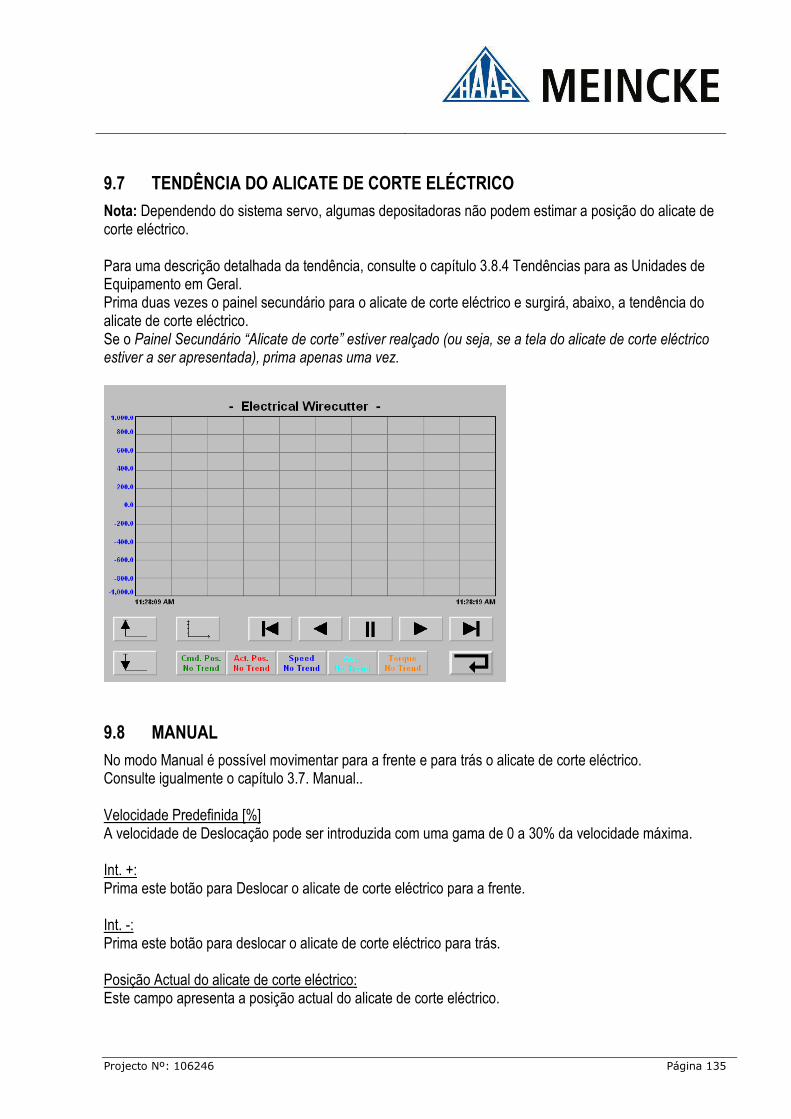
Projecto Nº: 106246 Página 135
9.7 TENDÊNCIA DO ALICATE DE CORTE ELÉCTRICO
Nota: Dependendo do sistema servo, algumas depositadoras não podem estimar a posição do alicate de corte eléctrico. Para uma descrição detalhada da tendência, consulte o capítulo 3.8.4 Tendências para as Unidades de Equipamento em Geral. Prima duas vezes o painel secundário para o alicate de corte eléctrico e surgirá, abaixo, a tendência do alicate de corte eléctrico. Se o Painel Secundário “Alicate de corte” estiver realçado (ou seja, se a tela do alicate de corte eléctrico estiver a ser apresentada), prima apenas uma vez.
9.8 MANUAL
No modo Manual é possível movimentar para a frente e para trás o alicate de corte eléctrico. Consulte igualmente o capítulo 3.7. Manual.. Velocidade Predefinida [%] A velocidade de Deslocação pode ser introduzida com uma gama de 0 a 30% da velocidade máxima. Int. +: Prima este botão para Deslocar o alicate de corte eléctrico para a frente. Int. -: Prima este botão para deslocar o alicate de corte eléctrico para trás. Posição Actual do alicate de corte eléctrico: Este campo apresenta a posição actual do alicate de corte eléctrico.
Página 136 Projecto Nº.: 106246
9.9 INFORMAÇÕES DA MÁQUINA
Reduza o movimento do alicate de corte A informação da máquina anterior será apresentada no modo “Automático” ou “Avançado”, se o movimento “Graus alicate de corte” for superior a “Graus Máx. do alicate de corte”. Aumente o movimento da base do alicate de corte A informação da máquina anterior será apresentada no modo “Avançada” se o movimento “Graus da base do alicate de corte” for superior a “Graus Máx. da base do alicate de corte”. Velocidade da máquina limitada pela unidade do alicate de corte eléctrico Pode ocorrer quando o alicate de corte eléctrico está ligado à Máquina. A velocidade da Máquina introduzida é superior à máxima para o alicate de corte eléctrico. A Direcção do Alicate de Corte Eléctrico não está ok A Informação da Máquina acima indicada será exibida se a direcção na receita carregada não corresponder à direcção actual do alicate de corte eléctrico. Vá até à tela do Alicate de corte eléctrico e altere a direcção do alicate de corte. Consulte o capítulo 9.2.1 Como Alterar a Direcção do Alicate de Corte Eléctrico. A mover alicate de corte para posição de paragem O alicate de corte eléctrico está a ser movido para a respectiva posição de paragem. A posição de paragem do alicate de corte eléctrico é igual à posição inicial se o modo Automático ou Avançado estiverem seleccionados e se a posição de paragem = “0˚” estiver seleccionada no modo ligado para a Máquina. Nenhum modo de alicate de corte seleccionado A Informação da Máquina acima indicada será exibida se o alicate de corte eléctrico tiver tentado arrancar sem estar seleccionado.
Projecto Nº: 106246 Página 137
9.10 ALARMES
Alarme 353 Falha do eixo do servo do alicate de corte eléctrico Acção: Verifique os bujões e o controlador servo no motor e reinicie Alarme 354 Detector de proximidade de paragem de posição do alicate de corte eléctrico não activado durante o funcionamento Acção: Verifique o detector de proximidade

Página 138 Projecto Nº.: 106246

Projecto Nº: 106246 Página 139
10 TRANSPORTADOR
10.1 OPERAÇÃO
A tela do Transportador em produção depende do modo seleccionado. Todos os modos: Contínuo, Automático, Avançado e Ligado para o Comprimento da Máquina estão listados a seguir e os capítulos seguintes descrevem cada um dos modos. É ainda possível escolher Transportador Não usado.
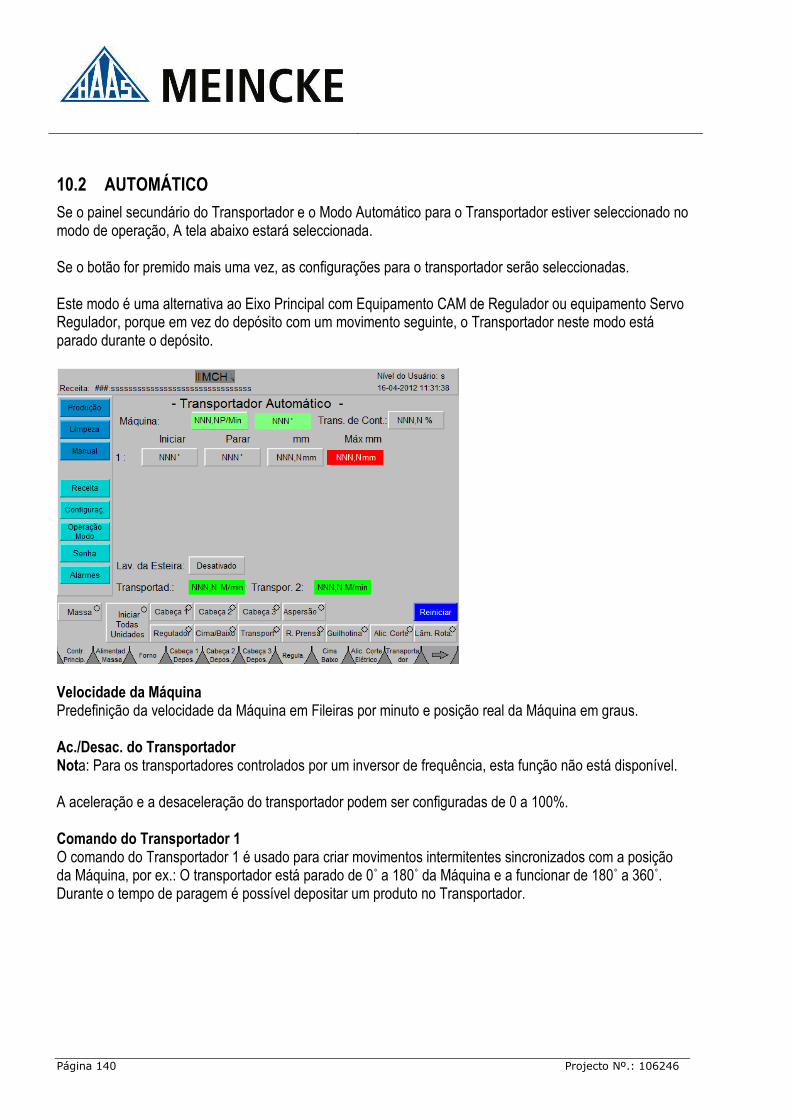
Página 140 Projecto Nº.: 106246
10.2 AUTOMÁTICO
Se o painel secundário do Transportador e o Modo Automático para o Transportador estiver seleccionado no modo de operação, A tela abaixo estará seleccionada. Se o botão for premido mais uma vez, as configurações para o transportador serão seleccionadas. Este modo é uma alternativa ao Eixo Principal com Equipamento CAM de Regulador ou equipamento Servo Regulador, porque em vez do depósito com um movimento seguinte, o Transportador neste modo está parado durante o depósito.
Velocidade da Máquina Predefinição da velocidade da Máquina em Fileiras por minuto e posição real da Máquina em graus. Ac./Desac. do Transportador Nota: Para os transportadores controlados por um inversor de frequência, esta função não está disponível. A aceleração e a desaceleração do transportador podem ser configuradas de 0 a 100%. Comando do Transportador 1 O comando do Transportador 1 é usado para criar movimentos intermitentes sincronizados com a posição da Máquina, por ex.: O transportador está parado de 0˚ a 180˚ da Máquina e a funcionar de 180˚ a 360˚. Durante o tempo de paragem é possível depositar um produto no Transportador.

Projecto Nº: 106246 Página 141
Posições Inicial e de Paragem As posições Inicial e de Paragem referem-se à posição da Máquina. Podem ser introduzidos pontos de definição entre 0 e 359 graus. Quando a Máquina passar a posição Inicial, o Transportador começa a deslocar-se a distância introduzida e pára quando a Máquina atinge a posição de Paragem. mm mm refere-se à distância que o transportador tem de se deslocar quando a posição actual da Máquina se encontra entre a posição Inicial e a de paragem. A velocidade do transportador é calculada pelo computador e depende da velocidade da Máquina, posições Início/paragem e mm. Isso assegura que o transportador se desloque sempre para a distância correcta independentemente da velocidade da Máquina. Quantidade Máx. O limite máx. geral de mm é de 720 mm, mas o computador calcula também um valor máximo baseado na velocidade da Máquina, nas posições Inicial/de paragem e mm. Se for introduzida uma distância superior ao mm Máx., uma Informação da Máquina será exibida e a distância calculada do Transportador reduzida 1 ponto de definição.
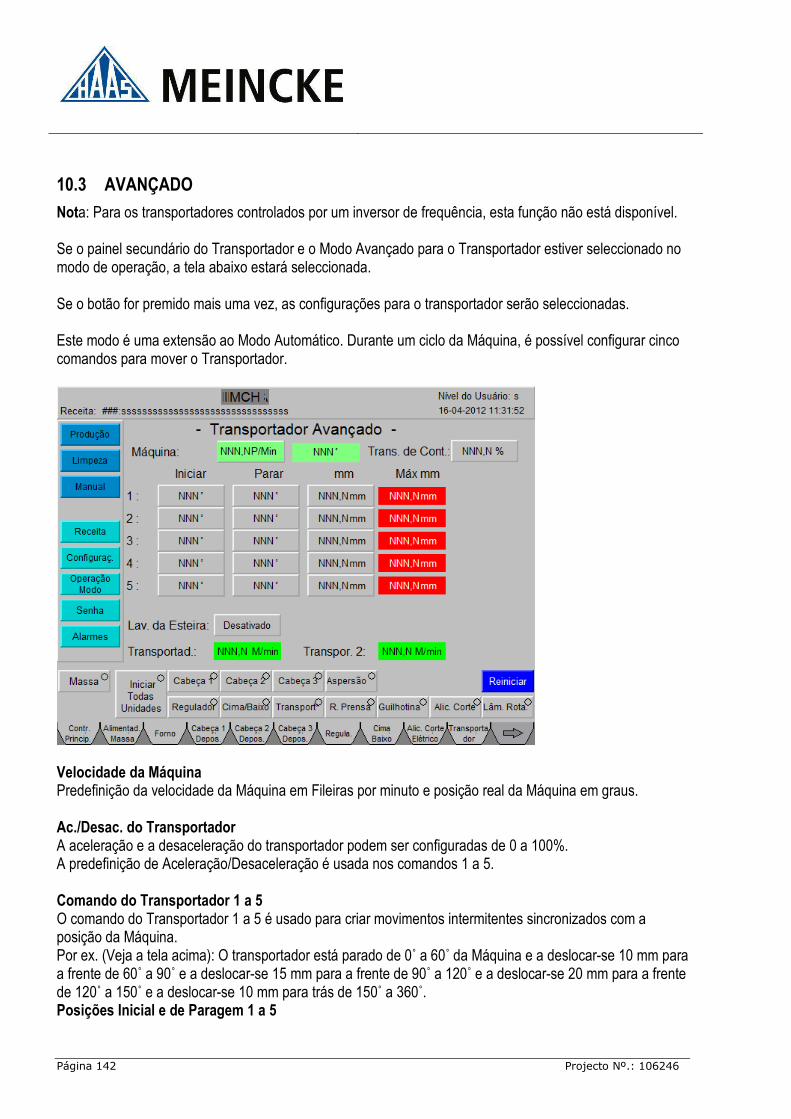
Página 142 Projecto Nº.: 106246
10.3 AVANÇADO
Nota: Para os transportadores controlados por um inversor de frequência, esta função não está disponível. Se o painel secundário do Transportador e o Modo Avançado para o Transportador estiver seleccionado no modo de operação, a tela abaixo estará seleccionada. Se o botão for premido mais uma vez, as configurações para o transportador serão seleccionadas. Este modo é uma extensão ao Modo Automático. Durante um ciclo da Máquina, é possível configurar cinco comandos para mover o Transportador.
Velocidade da Máquina Predefinição da velocidade da Máquina em Fileiras por minuto e posição real da Máquina em graus. Ac./Desac. do Transportador A aceleração e a desaceleração do transportador podem ser configuradas de 0 a 100%. A predefinição de Aceleração/Desaceleração é usada nos comandos 1 a 5. Comando do Transportador 1 a 5 O comando do Transportador 1 a 5 é usado para criar movimentos intermitentes sincronizados com a posição da Máquina. Por ex. (Veja a tela acima): O transportador está parado de 0˚ a 60˚ da Máquina e a deslocar-se 10 mm para a frente de 60˚ a 90˚ e a deslocar-se 15 mm para a frente de 90˚ a 120˚ e a deslocar-se 20 mm para a frente de 120˚ a 150˚ e a deslocar-se 10 mm para trás de 150˚ a 360˚. Posições Inicial e de Paragem 1 a 5
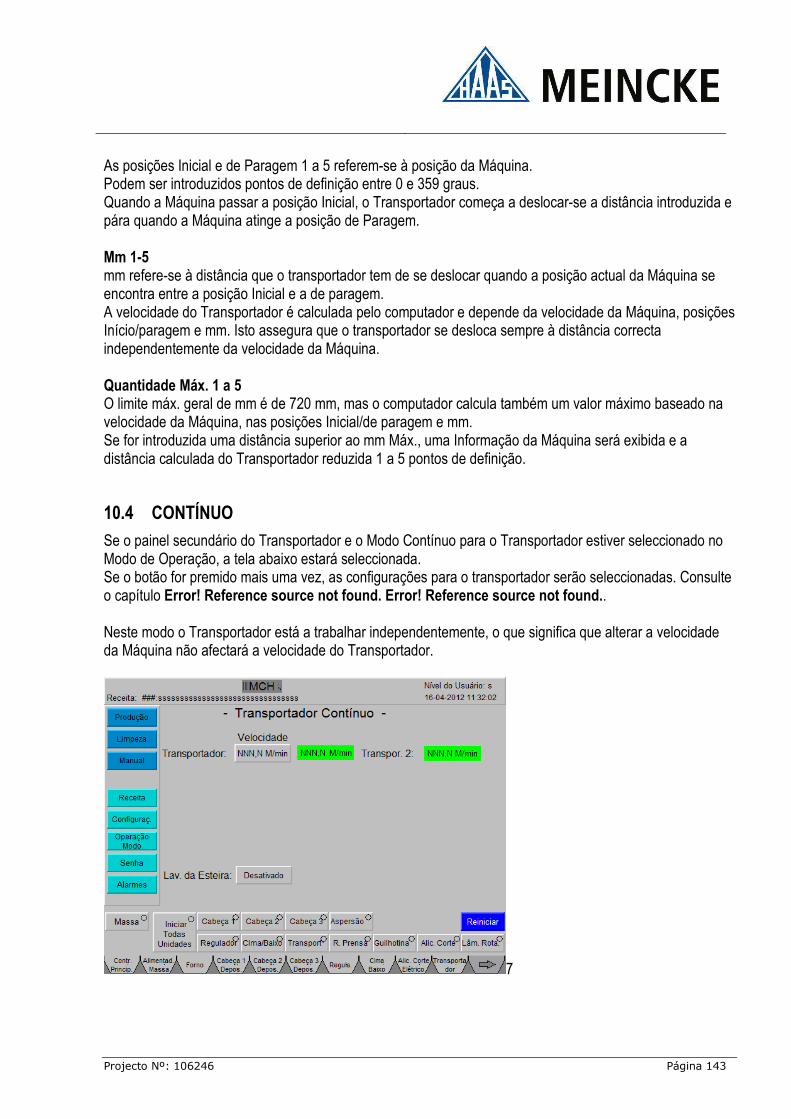
Projecto Nº: 106246 Página 143
As posições Inicial e de Paragem 1 a 5 referem-se à posição da Máquina. Podem ser introduzidos pontos de definição entre 0 e 359 graus. Quando a Máquina passar a posição Inicial, o Transportador começa a deslocar-se a distância introduzida e pára quando a Máquina atinge a posição de Paragem. Mm 1-5 mm refere-se à distância que o transportador tem de se deslocar quando a posição actual da Máquina se encontra entre a posição Inicial e a de paragem. A velocidade do Transportador é calculada pelo computador e depende da velocidade da Máquina, posições Início/paragem e mm. Isto assegura que o transportador se desloca sempre à distância correcta independentemente da velocidade da Máquina. Quantidade Máx. 1 a 5 O limite máx. geral de mm é de 720 mm, mas o computador calcula também um valor máximo baseado na velocidade da Máquina, nas posições Inicial/de paragem e mm. Se for introduzida uma distância superior ao mm Máx., uma Informação da Máquina será exibida e a distância calculada do Transportador reduzida 1 a 5 pontos de definição.
10.4 CONTÍNUO
Se o painel secundário do Transportador e o Modo Contínuo para o Transportador estiver seleccionado no Modo de Operação, a tela abaixo estará seleccionada. Se o botão for premido mais uma vez, as configurações para o transportador serão seleccionadas. Consulte o capítulo Error! Reference source not found. Error! Reference source not found.. Neste modo o Transportador está a trabalhar independentemente, o que significa que alterar a velocidade da Máquina não afectará a velocidade do Transportador.
7

Página 144 Projecto Nº.: 106246
Velocidade do Transportador Pode ser introduzida a velocidade do Transportador em M/min. O limite da velocidade varia dependendo da Aplicação. A velocidade real em m/min. é apresentada quando o Transportador está em funcionamento.
10.5 LIGADO À MÁQUINA
Se o painel secundário do Transportador e o Modo Contínuo para o Transportador estiver seleccionado no modo de operação, a tela abaixo estará seleccionada. Se o botão for premido mais uma vez, as configurações para o transportador serão seleccionadas. Neste modo, o Transportador está ligado à Máquina. Significa que quando alterar a velocidade da Máquina, o Transportador acompanhará. A velocidade do transportador é um resultado de um Comprimento do Produto e da velocidade da Máquina. 1 ciclo da Máquina = 1 comprimento do Produto.
Velocidade da Máquina Predefinição da velocidade da Máquina em Fileiras por minuto e posição real da Máquina em graus. Comprimento do Produto O comprimento do produto é introduzido em mm e medido da ponta frontal do Produto até à ponta frontal do próximo produto.

Projecto Nº: 106246 Página 145
10.6 Configurações
Com este botão pode aceder à Tela com a Tendência do Transportador.

Página 146 Projecto Nº.: 106246
10.6.1 CONTROLO DA ESTEIRA
Visão geral do transportador com sensores e válvulas de banda é apresentado em Configurações do Transportador por forma a ajudar a ajustar a banda do Transportador. Compreender a Visão Geral do Controlo da Esteira
• O sistema de controlo de banda do transportador está OK quando o Sensor ON (Ligado) está verde (activo) e o Sensor OFF (Desligado) está amarelo (inactivo) por mais de 2-5 minutos.
• Se o Sensor ON fica amarelo durante mais de 5 segundos, então a Válvula ON fica verde e quando o Sensor ON fica verde durante mais de 15 segundos, então a Válvula ON fica amarela.
• Se o Sensor OFF fica verde durante mais de 5 segundos, então a Válvula OFF fica verde e quando o Sensor OFF fica amarelo durante mais de 15 segundos, então a Válvula OFF fica amarela.
• Se o Sensor ON fica amarelo ou se o Sensor OFF fica amarelo durante mais de 240 segundos, então o Alarme 387: “Controlo de banda no Transportador está fora do limite” aparecerá no painel do operador.
Nota: Os segundos mencionados na descrição acima são ajustáveis e são apenas um padrão da HAAS-Meincke para as configurações do transportador.
Configure a velocidade do Transportador premindo este botão. Nota: se Ligado à Máquina estiver seleccionado, a velocidade do transportador é alterada introduzindo a velocidade da Máquina.
Prima o botão para iniciar ou parar o transportador. Activar a válvula Off:
O tempo desde que o sensor Off é activado até que a válvula Off é activada (tipicamente configurado para 5 segundos). Prima o botão para introduzir uma nova predefinição.
O tempo actualmente decorrido de “Activar a válvula Off“ está a ser apresentado. Desactivar a válvula Off:
“Desactivar a válvula off“; o tempo desde que o sensor off não é activado até que a válvula off é desactivada (tipicamente configurado para 15 segundos). Prima o botão para introduzir uma nova predefinição.
O tempo actualmente decorrido de “Desactivar da válvula off“ está a ser apresentado.

Projecto Nº: 106246 Página 147
Alarme da válvula off:
“Alarme de válvula off“; o tempo máximo que a válvula on tem que estar ligada antes de o alarme off ser despoletado (Tipicamente configurado para 180 segundos). Prima o botão para introduzir uma nova predefinição.
O tempo actualmente decorrido de “Alarme da válvula off“ está a ser apresentado. Na activação da válvula:
“Activar a válvula on“; o tempo desde que o sensor on é desactivado até que a válvula on é activada (tipicamente configurado para 5 segundos). Prima o botão para introduzir uma nova predefinição.
O tempo actualmente decorrido de “Activação da válvula on“ está a ser apresentado. Desactivação da válvula on:
“Desactivar a válvula on“; o tempo desde que o sensor on é activado até que a válvula on é desactivada (Tipicamente configurado para 15 segundos). Prima o botão para introduzir uma nova predefinição.
O tempo actualmente decorrido de “Desactivar a válvula on“ está a ser apresentado. Alarme da válvula on:
“Alarme de válvula on“; o tempo máximo que a válvula on tem que estar ligada antes de o alarme on ser despoletado (Tipicamente configurado para 180 segundos). Prima o botão para introduzir uma nova predefinição.
O tempo actualmente decorrido de “Alarme da válvula on“ está a ser apresentado.
Prima este botão para forçar a válvula off a ligar/desligar.
Prima este botão para alternar entre desactivar e activar o controlo da esteira.
Prima este botão para forçar a válvula on a ligar/desligar.

Página 148 Projecto Nº.: 106246
Ajustar a Esteira do Transportador 1. Limpe os rolos da esteira e a esteira. 2. Inicie o Transportador com alta velocidade (por exemplo, 8 m/s). 3. Desligue o controlo da Esteira antes de ajustar a esteira alternando o botão “Controlo da esteira
activado” para “Controlo da esteira desactivado”. 4. Observe a posição da esteira e faça o ajuste mecânico por forma a segurar a esteira no centro onde
o “Sensor on” está Ligado e o “Sensor Off” está Desligado. 5. Ligue o controlo da esteira de novo alternando o botão “Controlo da esteira desactivado” para
“Controlo da esteira activado”. 6. Verifique que a posição da esteira está segura. 7. Provoque um erro de posição premindo o botão “Controlo do Sensor Válvula On”. Isso forçará a
“Válvula on” a ligar. A esteira deve agora deslocar-se em direcção a “Válvula on”. Quando o “Sensor on” estiver desligado, prima “Controlo do Sensor Válvula On” de novo para desligar a “Válvula on” de novo. Verifique que a “Válvula off” está ligada até que a esteira esteja em posição.
8. Provoque um erro de posição premindo o botão “Controlo do Sensor Válvula Off”. Isso forçará a “Válvula off” a ligar. A esteira deve agora deslocar-se em direcção a “Válvula off”. Quando o “Sensor off” estiver desligado, prima “Controlo do Sensor Válvula Off” de novo para desligar a “Válvula off” de novo. Verifique que a “Válvula on” está ligada até que a esteira esteja em posição.
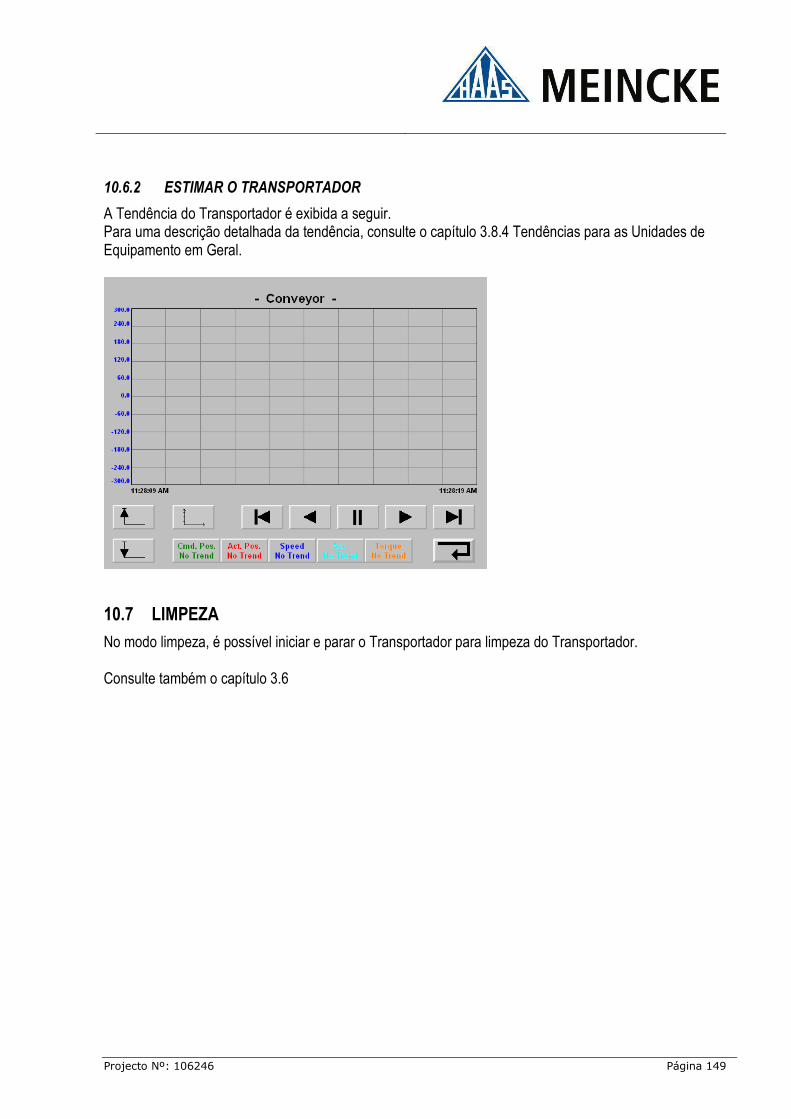
Projecto Nº: 106246 Página 149
10.6.2 ESTIMAR O TRANSPORTADOR
A Tendência do Transportador é exibida a seguir. Para uma descrição detalhada da tendência, consulte o capítulo 3.8.4 Tendências para as Unidades de Equipamento em Geral.
10.7 LIMPEZA
No modo limpeza, é possível iniciar e parar o Transportador para limpeza do Transportador. Consulte também o capítulo 3.6
Página 150 Projecto Nº.: 106246
Limpeza para mais informações sobre a operação de limpeza em geral.
Prima este botão para fazer Iniciar/Parar o Transportador
A velocidade do Transportador pode ser introduzida com uma gama de 0 a 10 mm/min.
Projecto Nº: 106246 Página 151
10.8 MANUAL
No modo Manual é possível movimentar para a frente e para trás o Transportador. Consulte igualmente o capítulo 3.7. Manual para mais informação sobre a operação manual em geral.
A velocidade de Deslocação pode ser introduzida com uma gama de 0 a 10 mm/Seg.
Prima este botão para Deslocar o Transportador para a frente
Prima este botão para Deslocar o Transportador para trás
A posição Actual do rolo de Alimentação é exibida.
10.9 INFORMAÇÕES DA MÁQUINA
Reduza a distância 1 do Transportador A informação da Máquina acima indicada será exibida se mm for superior a mm Máx. mm Máx. é calculado pelo computador e depende da velocidade actual da Máquina e da velocidade Máxima do Transportador. Reduza a distância 2 do Transportador A informação da Máquina acima indicada será exibida se mm for superior a mm Máx. mm Máx. é calculado pelo computador e depende da velocidade actual da Máquina e da velocidade Máxima do Transportador. Reduza a Distância 3 do Transportador A informação da Máquina acima indicada será exibida se mm for superior a mm Máx. mm Máx. é calculado pelo computador e depende da velocidade actual da Máquina e da velocidade Máxima do Transportador. Reduza a Distância 4 do Transportador A informação da Máquina acima indicada será exibida se mm for superior a mm Máx. mm Máx. é calculado pelo computador e depende da velocidade actual da Máquina e da velocidade Máxima do Transportador. Reduza a Distância 5 do Transportador A Informação da Máquina acima indicada será exibida se mm for superior a mm Máx.

Página 152 Projecto Nº.: 106246
mm Máx. é calculado pelo computador e depende da velocidade actual da Máquina e da velocidade Máxima do Transportador. Velocidade do Transportador limitada pela velocidade máxima do Transportador A velocidade do Transportador excedeu o limite máximo de velocidade para o Transportador. Velocidade da máquina limitada pela unidade do Transportador A velocidade da Máquina introduzida foi reduzida porque o Transportador está a funcionar como escravo à Máquina e a Máquina introduzida teria resultado em limite máximo para o Transportador excedido. Nenhum modo do Transportador seleccionado A informação da Máquina anterior será exibida se o operador estiver a tentar dar início ao Transportador e esta unidade não estiver seleccionada.

Projecto Nº: 106246 Página 153
10.10 ALARMES
Alarme 385 Falha do eixo do servo no Transportador Acção: Verifique os bujões e o controlador servo no motor e reinicie Alarme 386 Detector de proximidade de paragem de posição do Transportador não activado durante o funcionamento Acção: Verifique o detector de proximidade Alarme 387 Controlo da esteira no Transportador se encontra fora do limite Acção: Verifique os sensores e válvulas solenóides

Página 154 Projecto Nº.: 106246

Projecto Nº: 106246 Página 155
11 PARA CIMA E PARA BAIXO A função de para Cima e para Baixo é mover outra unidade, por exemplo, uma unidade de corte ou a Esteira do Transportador, para cima e para baixa.
11.1 OPERAÇÃO
Para Cima e para Baixo é equipamento adicional, e tem dois modos para além do modo 'Não Usado': Nota: Se for seleccionado o modo para Cima e para Baixo ‘Não usado’, é possível desligar as fichas do Servomotor para o movimento para Cima e para Baixo.
• Modo Automático para Cima e para Baixo. Este modo oferece as configurações mais básicas para o movimento para Cima e para Baixo.
• Modo de Projecção CAM para Cima e para Baixo. Este modo permite configurações mais avançadas para o movimento para Cima e para Baixo.
Os modos estão descritos em secções separadas, e os menus descritos dependem do modo para Cima e para Baixo real.

Página 156 Projecto Nº.: 106246
11.2 AUTOMÁTICO PARA CORTADOR OU TRANSPORTADOR
Neste modo, o movimento para Cima e para Baixo está a funcionar como “escravo” em relação à máquina, isto é, a velocidade da máquina define o número de produtos por minuto. A unidade para Cima e para Baixo move o equipamento para cima e para baixo quando a posição da Máquina cruza a posição de início introduzida. Valores altos de Velocidade e Aceleração resultam num movimento rápido.
Nota. Se a aba para Cima e para Baixo é tocada duas vezes, as configurações para Cima e para Baixo aparecem. Por favor consulte a secção Configurações.
A velocidade da Máquina é configurada em Fileiras por minuto e a posição actual da Máquina é mostrada em graus.
A posição para Cima e para Baixo actual em 0 a 360 graus.
Projecto Nº: 106246 Página 157
No Modo Automático pode configurar até 4 movimentos parciais separados para o movimento para Cima e para Baixo. Estas partes do movimento para Cima e para Baixo são iniciadas pelos comandos no Movimento 1 a 4. Apenas um comando pode funcionar de cada vez. O operador deve estimar se um comando em funcionamento está concluído antes do próximo comando iniciar. Se um novo comando começar enquanto outro comando ainda estiver a funcionar, o que ainda estava a funcionar pára. Nota: Alterar a velocidade da Máquina terá um grande impacto na coordenação dos comandos. Assim é importante introduzir a velocidade da Máquina correcta antes de ajustar os comandos. Um comando pode ser desactivado introduzindo '0' em todos os campos do comando.
11.2.1 POSIÇÃO DE INÍCIO
O movimento para Cima e para Baixo inicia-se de acordo com o valor de Início introduzido combinado com a posição actual da Máquina. Os valores introduzidos para as posições de Início referem-se à posição da posição virtual actual da Máquina. Podem ser introduzidos valores entre 0 e 359 graus. Quando a posição virtual da Máquina cruza a posição de Início introduzida, o servomotor iniciará o seu movimento.
11.2.2 MOVIMENTO
A distância que a unidade para Cima e para Baixo se movimenta.
11.2.3 VELOCIDADE
É a velocidade com que a unidade se move. Nota. Se configurar a velocidade demasiado baixa, fará com que a unidade para Cima e para Baixo fique com uma velocidade mais lenta que a da Máquina virtual. É importante que isso não aconteça, porque pode fazer com que a unidade para Cima e para Baixo fique instável. Um valor padrão é 100mm/S.
11.2.4 AC. MÁX. (ACELERAÇÃO MÁXIMA)
É a aceleração máxima para a unidade. Nota. Se configurar para uma aceleração demasiado baixa, fará com que a unidade para Cima e para Baixo fique com uma velocidade mais lenta que a da Máquina virtual. É importante que isso não aconteça, porque pode fazer com que a unidade para Cima e para Baixo fique instável. Um valor padrão fica entre os 50 e os 100%.

Página 158 Projecto Nº.: 106246
11.3 CAM PARA CORTADOR OU TRANSPORTADOR
Neste modo, o movimento para Cima e para Baixo está a funcionar como “escravo” em relação à máquina, isto é, a velocidade da máquina define o número de produtos por minuto. A tendência na tela abaixo apresenta a unidade para Cima e para Baixo a funcionar fisicamente. O movimento para Cima e para Baixo actual está apresentado em conjunto com a posição actual da Máquina. Pode adicionar mostradores secundários para outras unidades que podem ajudar no ajuste do CAM para a unidade para Cima e para Baixo. No exemplo vê o movimento para Cima e para Baixo de 0 a 24 mm entre as posições da Máquina de 10 a 3450
Nota. Se a aba para Cima e para Baixo for tocada duas vezes seguidas. Em seguida as configurações de para Cima e para Baixo aparecerão. Por favor consulte a secção Configurações.
A velocidade da Máquina é configurada em Fileiras por minuto e a posição actual da Máquina é mostrada em graus.
É a Velocidade e Posição actual de para Cima e para Baixo.
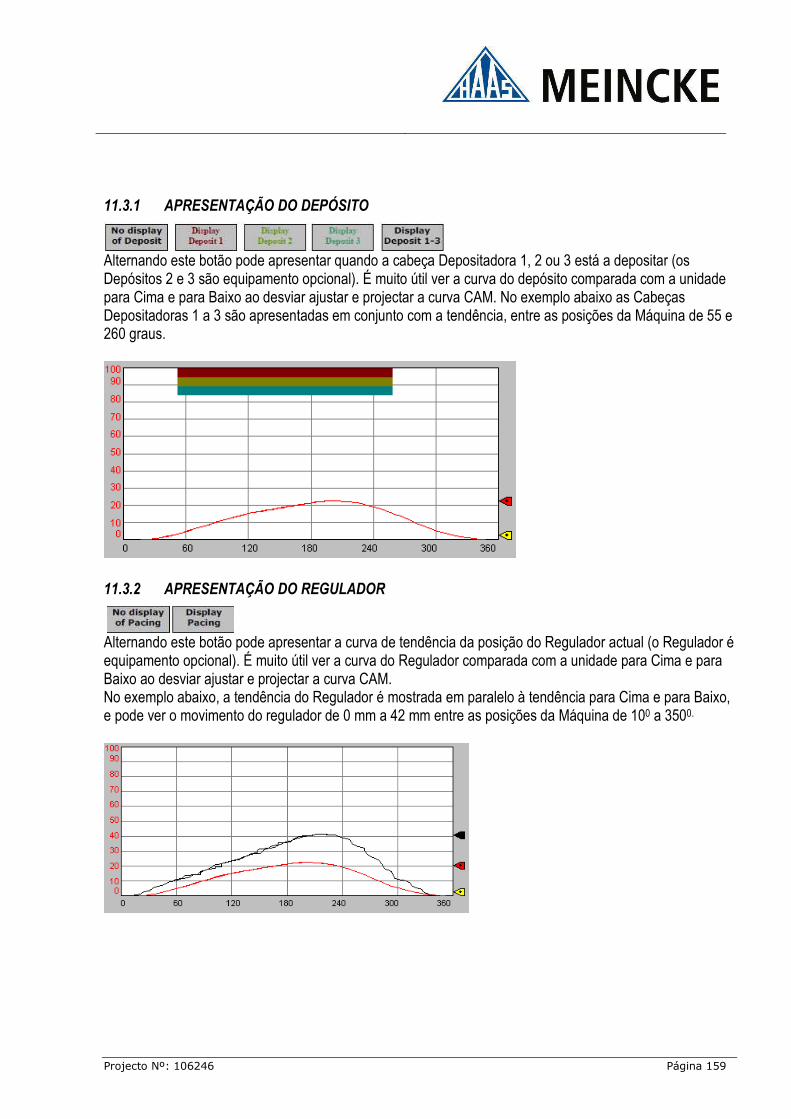
Projecto Nº: 106246 Página 159
11.3.1 APRESENTAÇÃO DO DEPÓSITO
Alternando este botão pode apresentar quando a cabeça Depositadora 1, 2 ou 3 está a depositar (os Depósitos 2 e 3 são equipamento opcional). É muito útil ver a curva do depósito comparada com a unidade para Cima e para Baixo ao desviar ajustar e projectar a curva CAM. No exemplo abaixo as Cabeças Depositadoras 1 a 3 são apresentadas em conjunto com a tendência, entre as posições da Máquina de 55 e 260 graus.
11.3.2 APRESENTAÇÃO DO REGULADOR
Alternando este botão pode apresentar a curva de tendência da posição do Regulador actual (o Regulador é equipamento opcional). É muito útil ver a curva do Regulador comparada com a unidade para Cima e para Baixo ao desviar ajustar e projectar a curva CAM. No exemplo abaixo, a tendência do Regulador é mostrada em paralelo à tendência para Cima e para Baixo, e pode ver o movimento do regulador de 0 mm a 42 mm entre as posições da Máquina de 100 a 3500.
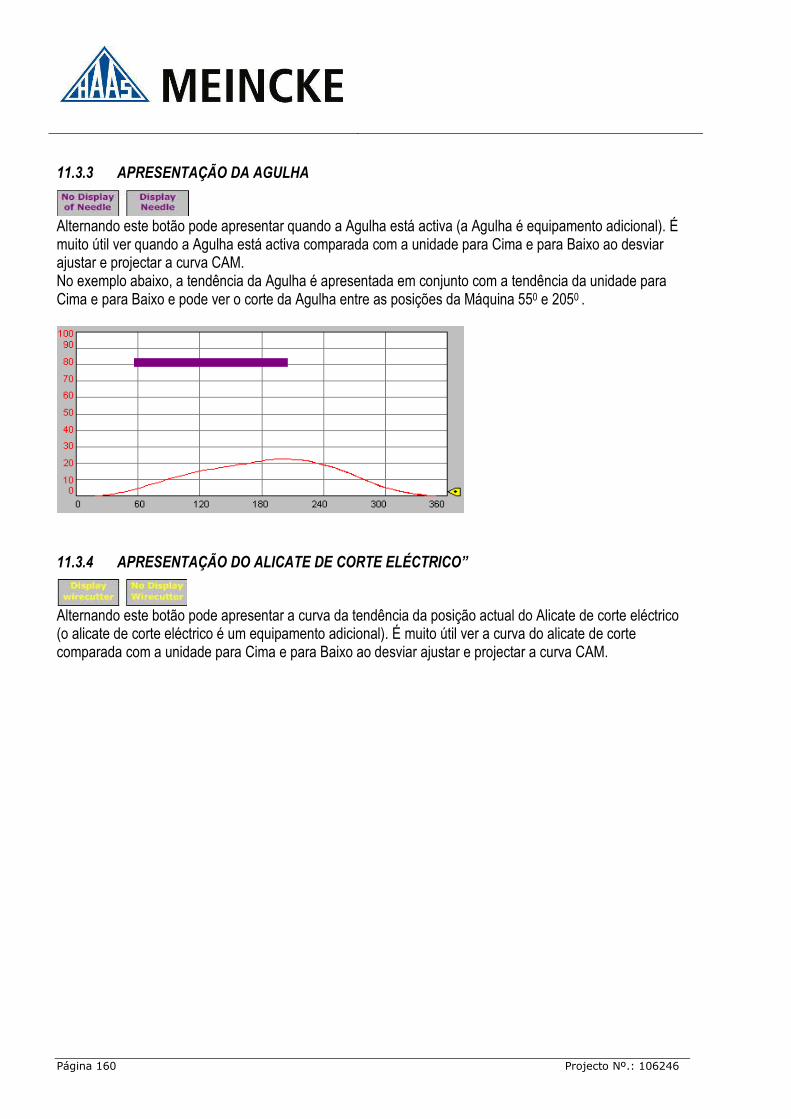
Página 160 Projecto Nº.: 106246
11.3.3 APRESENTAÇÃO DA AGULHA
Alternando este botão pode apresentar quando a Agulha está activa (a Agulha é equipamento adicional). É muito útil ver quando a Agulha está activa comparada com a unidade para Cima e para Baixo ao desviar ajustar e projectar a curva CAM. No exemplo abaixo, a tendência da Agulha é apresentada em conjunto com a tendência da unidade para Cima e para Baixo e pode ver o corte da Agulha entre as posições da Máquina 550 e 2050 .
11.3.4 APRESENTAÇÃO DO ALICATE DE CORTE ELÉCTRICO”
Alternando este botão pode apresentar a curva da tendência da posição actual do Alicate de corte eléctrico (o alicate de corte eléctrico é um equipamento adicional). É muito útil ver a curva do alicate de corte comparada com a unidade para Cima e para Baixo ao desviar ajustar e projectar a curva CAM.
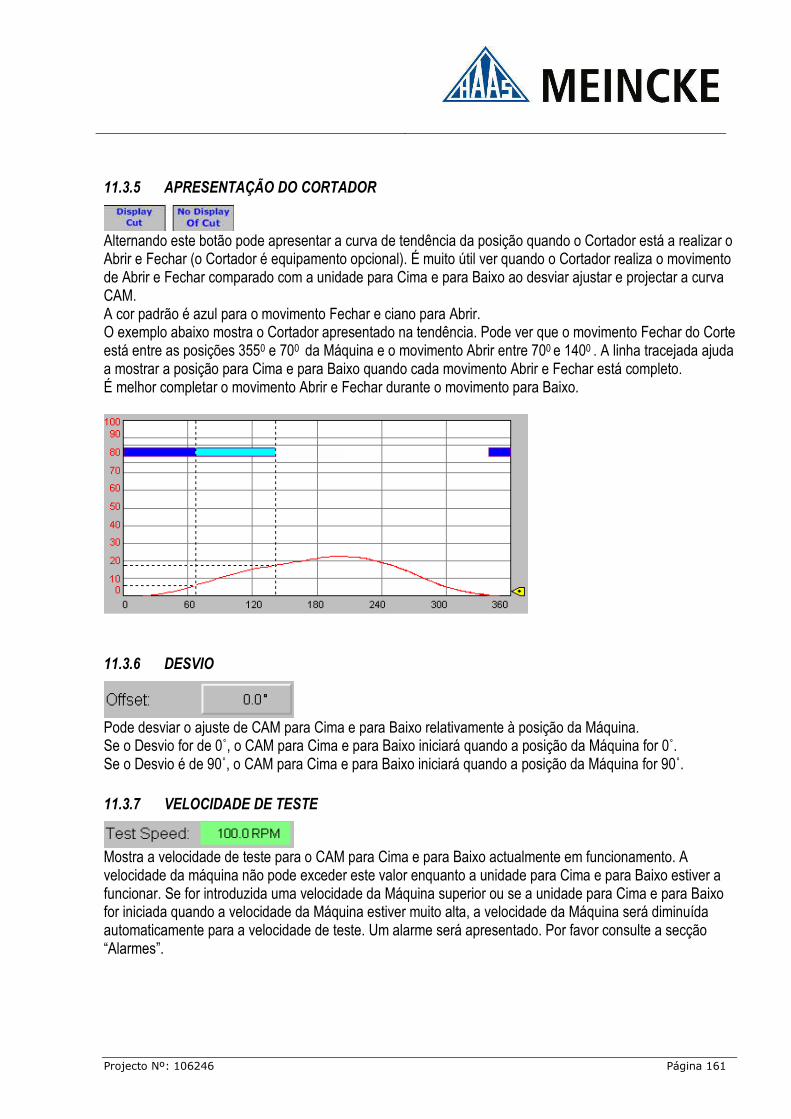
Projecto Nº: 106246 Página 161
11.3.5 APRESENTAÇÃO DO CORTADOR
Alternando este botão pode apresentar a curva de tendência da posição quando o Cortador está a realizar o Abrir e Fechar (o Cortador é equipamento opcional). É muito útil ver quando o Cortador realiza o movimento de Abrir e Fechar comparado com a unidade para Cima e para Baixo ao desviar ajustar e projectar a curva CAM. A cor padrão é azul para o movimento Fechar e ciano para Abrir. O exemplo abaixo mostra o Cortador apresentado na tendência. Pode ver que o movimento Fechar do Corte está entre as posições 3550 e 700 da Máquina e o movimento Abrir entre 700 e 1400 . A linha tracejada ajuda a mostrar a posição para Cima e para Baixo quando cada movimento Abrir e Fechar está completo. É melhor completar o movimento Abrir e Fechar durante o movimento para Baixo.
11.3.6 DESVIO
Pode desviar o ajuste de CAM para Cima e para Baixo relativamente à posição da Máquina. Se o Desvio for de 0˚, o CAM para Cima e para Baixo iniciará quando a posição da Máquina for 0˚. Se o Desvio é de 90˚, o CAM para Cima e para Baixo iniciará quando a posição da Máquina for 90˚.
11.3.7 VELOCIDADE DE TESTE
Mostra a velocidade de teste para o CAM para Cima e para Baixo actualmente em funcionamento. A velocidade da máquina não pode exceder este valor enquanto a unidade para Cima e para Baixo estiver a funcionar. Se for introduzida uma velocidade da Máquina superior ou se a unidade para Cima e para Baixo for iniciada quando a velocidade da Máquina estiver muito alta, a velocidade da Máquina será diminuída automaticamente para a velocidade de teste. Um alarme será apresentado. Por favor consulte a secção “Alarmes”.
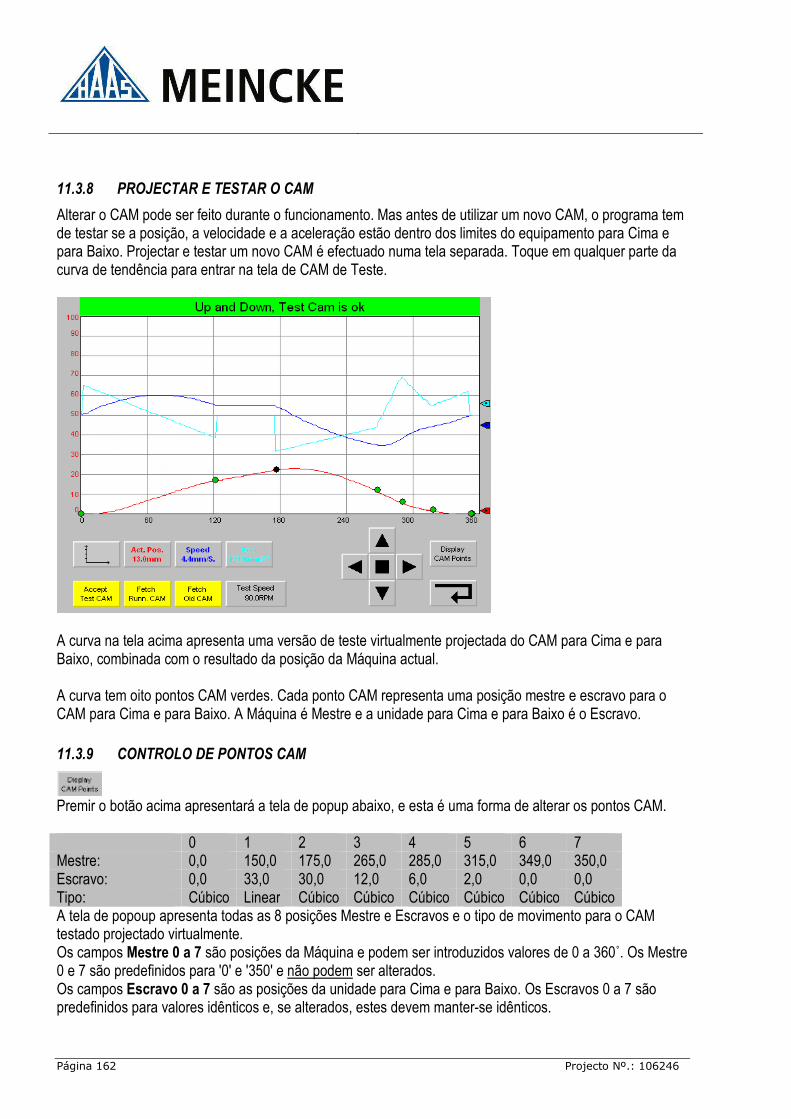
Página 162 Projecto Nº.: 106246
11.3.8 PROJECTAR E TESTAR O CAM
Alterar o CAM pode ser feito durante o funcionamento. Mas antes de utilizar um novo CAM, o programa tem de testar se a posição, a velocidade e a aceleração estão dentro dos limites do equipamento para Cima e para Baixo. Projectar e testar um novo CAM é efectuado numa tela separada. Toque em qualquer parte da curva de tendência para entrar na tela de CAM de Teste.
A curva na tela acima apresenta uma versão de teste virtualmente projectada do CAM para Cima e para Baixo, combinada com o resultado da posição da Máquina actual. A curva tem oito pontos CAM verdes. Cada ponto CAM representa uma posição mestre e escravo para o CAM para Cima e para Baixo. A Máquina é Mestre e a unidade para Cima e para Baixo é o Escravo.
11.3.9 CONTROLO DE PONTOS CAM
Premir o botão acima apresentará a tela de popup abaixo, e esta é uma forma de alterar os pontos CAM. 0 1 2 3 4 5 6 7 Mestre: 0,0 150,0 175,0 265,0 285,0 315,0 349,0 350,0 Escravo: 0,0 33,0 30,0 12,0 6,0 2,0 0,0 0,0 Tipo: Cúbico Linear Cúbico Cúbico Cúbico Cúbico Cúbico Cúbico A tela de popoup apresenta todas as 8 posições Mestre e Escravos e o tipo de movimento para o CAM testado projectado virtualmente. Os campos Mestre 0 a 7 são posições da Máquina e podem ser introduzidos valores de 0 a 360˚. Os Mestre 0 e 7 são predefinidos para '0' e '350' e não podem ser alterados. Os campos Escravo 0 a 7 são as posições da unidade para Cima e para Baixo. Os Escravos 0 a 7 são predefinidos para valores idênticos e, se alterados, estes devem manter-se idênticos.

Projecto Nº: 106246 Página 163
Tipo é o tipo de movimento para a Curva entre os pontos verdes. As opções são Linear ou Cúbico (Curva sinusoidal). O valor padrão é Cúbico, e é altamente recomendado manter este tipo padrão de comando. Nota: O movimento linear pode resultar em grande stress mecânico para o equipamento. O ponto CAM verde na curva de tendência irá alterar posições quando forem introduzidos novos valores na tela popup de controlo de pontos CAM.
Tocar no botão acima fecha a tela popup.
Utilizar o navegador é outra forma de alterar os pontos CAM. Use as setas da esquerda ou da direita para deslocar o ponto CAM que quer ajustar. Use o botão Introdução (o quadrado no meio) para seleccionar o ponto. O ponto CAM e o botão Introdução ficam vermelhos. Isso indica que o ponto seleccionado pode ser alterado tocando nos botões com setas para cima, para baixo, para a esquerda ou para a direita. Se um botão for premido por mais de 0,15 segundos, move o ponto mais depressa. Quando a posição do ponto CAM está ok, prima o botão Introduzir de novo. O ponto CAM e o botão Introdução ficam verdes de novo. Use as setas da esquerda ou da direita para deslocar o próximo ponto CAM que deseja ajustar. Alterar os pontos CAM na curva de tendência alterará também os valores no CAM de Teste.
Este botão alterna as unidades do eixo Y.
Este botão alterna entre apresentar e não apresentar a curva de tendência da posição Escrava testada.
O botão alterna entre apresentar e não apresentar a curva de tendência da velocidade para Cima e para Baixo testada.
Este botão alterna entre apresentar e não apresentar a curva de tendência da aceleração para Cima e para Baixo testada.

Página 164 Projecto Nº.: 106246
Com este botão o operador aceita o CAM testado projectado virtualmente e desloca-o para o CAM fisicamente a funcionar. Se para Cima e para Baixo está fisicamente a funcionar, este utilizará o CAM testado na próxima vez que a posição da Máquina cruzar a posição de Desvio. Se o teste do CAM de teste não estiver OK, o programa não aceitará e movimentará o CAM de Teste para o CAM em funcionamento.
Com este botão o operador desloca o CAM em Funcionamento para o CAM de Teste.
Com este botão o operador busca um CAM antigo. 'CAM antigo' é o CAM anteriormente em funcionamento.
Com este botão o operador pode configurar a velocidade Máquina que tem de ser usada na projecção virtual da CAM de teste. Nota: Quanto mais baixa for a Velocidade de Teste, mais alto é possível o movimento para Cima e para Baixo ser no CAM de teste virtualmente projectado. Por favor, veja a secção Configurações para mais opções para movimento mais alto.
11.3.10 APRESENTAÇÕES DE INFORMAÇÃO AO ALTERAR E TESTAR O CAM
Projecção Manual do CAM de Teste do movimento para Cima e para Baixo Apresentada durante os primeiros 4 segundos depois da introdução da Tela de projecção Manual. Falha de para Cima e para Baixo A unidade física de para Cima e para Baixo tem um erro. Para Cima e para Baixo, o CAM de Teste está ok O CAM de Teste passou no teste de Posição, Velocidade e Aceleração. Para Cima e para Baixo está a testar o CAM O CAM de Teste está a testar a posição, velocidade e aceleração. Para Cima e para Baixo, mínimo de 1˚ entre Pontos Mestre A distância entre pontos mestre no CAM de Teste não pode ser menos que 1˚. Para Cima e para Baixo, o ponto CAM é mais baixo que o limite mínimo A posição escrava introduzida no CAM de Teste é mais baixa que o limite mínimo de para Cima e para Baixo. Para Cima e para Baixo, o ponto CAM é mais baixo que o limite máximo A posição escrava introduzida no CAM de Teste é mais alta que o limite máximo de para Cima e para Baixo. Para Cima e para Baixo, limite da posição mín. excedido durante o teste de CAM A posição está a exceder o limite mínimo durante o teste. Consulte a linha de limite mínimo na curva de tendência.

Projecto Nº: 106246 Página 165
Para Cima e para Baixo, limite da posição máx. excedido durante o teste de CAM A posição está a exceder o limite máximo durante o teste. Consulte a linha de limite máximo na curva de tendência. Para Cima e para Baixo, limite de velocidade negativo excedido durante o teste de CAM O limite negativo de velocidade é excedido durante o teste de CAM. Consulte a linha de limite mínimo na curva de tendência. Para Cima e para Baixo, limite de velocidade positivo excedido durante o teste de CAM O limite positivo de velocidade é excedido durante o teste de CAM. Consulte a linha de limite máximo na curva de tendência. Para Cima e para Baixo, limite de desaceleração excedido durante o teste de CAM O limite negativo de aceleração é excedido durante o teste de CAM. Consulte a linha de limite mínimo na curva de tendência. Para Cima e para Baixo, limite de aceleração excedido durante o teste de CAM O limite positivo de aceleração é excedido durante o teste de CAM. Consulte a linha de limite máximo na curva de tendência. O CAM em funcionamento está a ser substituído pelo CAM de Teste O botão 'Aceitar CAM de Teste' foi premido e o CAM de teste projectado virtualmente está a ser deslocado para o CAM em Funcionamento. Erro de posição para Cima e para Baixo A Unidade física para Cima e para Baixo cometeu um erro devido a um erro de posição.
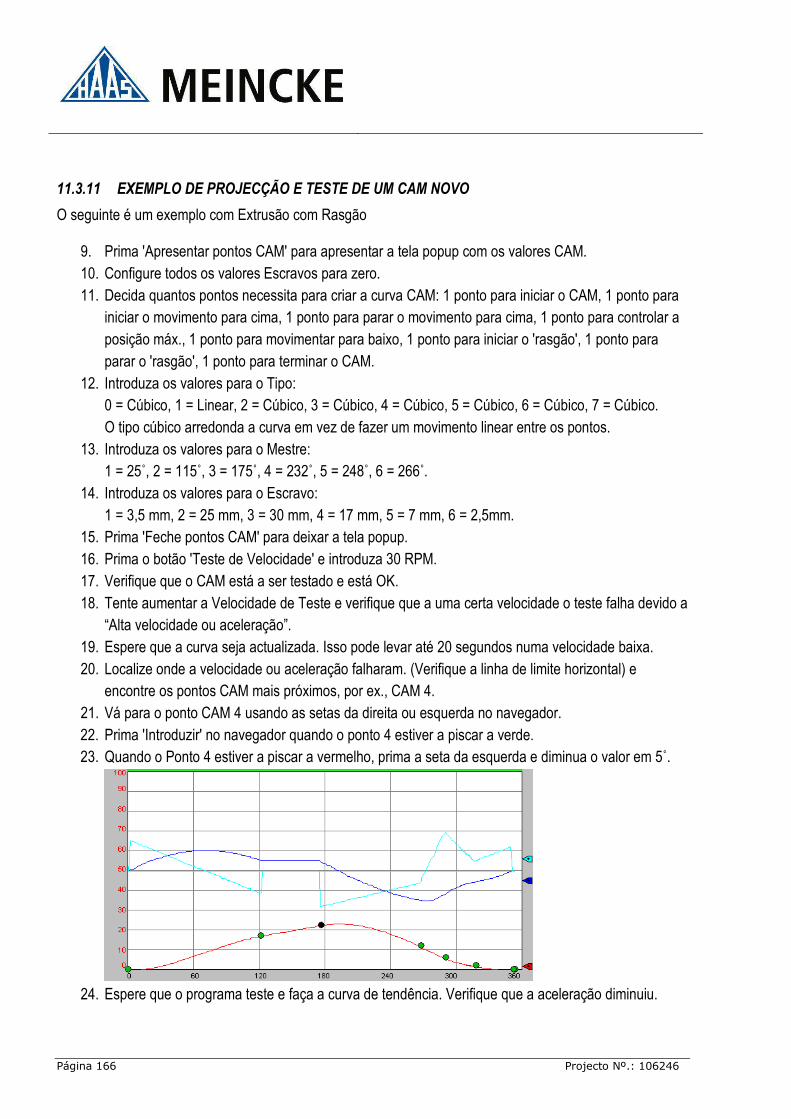
Página 166 Projecto Nº.: 106246
11.3.11 EXEMPLO DE PROJECÇÃO E TESTE DE UM CAM NOVO
O seguinte é um exemplo com Extrusão com Rasgão
9. Prima 'Apresentar pontos CAM' para apresentar a tela popup com os valores CAM. 10. Configure todos os valores Escravos para zero. 11. Decida quantos pontos necessita para criar a curva CAM: 1 ponto para iniciar o CAM, 1 ponto para
iniciar o movimento para cima, 1 ponto para parar o movimento para cima, 1 ponto para controlar a posição máx., 1 ponto para movimentar para baixo, 1 ponto para iniciar o 'rasgão', 1 ponto para parar o 'rasgão', 1 ponto para terminar o CAM.
12. Introduza os valores para o Tipo: 0 = Cúbico, 1 = Linear, 2 = Cúbico, 3 = Cúbico, 4 = Cúbico, 5 = Cúbico, 6 = Cúbico, 7 = Cúbico. O tipo cúbico arredonda a curva em vez de fazer um movimento linear entre os pontos.
13. Introduza os valores para o Mestre: 1 = 25˚, 2 = 115˚, 3 = 175˚, 4 = 232˚, 5 = 248˚, 6 = 266˚.
14. Introduza os valores para o Escravo: 1 = 3,5 mm, 2 = 25 mm, 3 = 30 mm, 4 = 17 mm, 5 = 7 mm, 6 = 2,5mm.
15. Prima 'Feche pontos CAM' para deixar a tela popup. 16. Prima o botão 'Teste de Velocidade' e introduza 30 RPM. 17. Verifique que o CAM está a ser testado e está OK. 18. Tente aumentar a Velocidade de Teste e verifique que a uma certa velocidade o teste falha devido a
“Alta velocidade ou aceleração”. 19. Espere que a curva seja actualizada. Isso pode levar até 20 segundos numa velocidade baixa. 20. Localize onde a velocidade ou aceleração falharam. (Verifique a linha de limite horizontal) e
encontre os pontos CAM mais próximos, por ex., CAM 4. 21. Vá para o ponto CAM 4 usando as setas da direita ou esquerda no navegador. 22. Prima 'Introduzir' no navegador quando o ponto 4 estiver a piscar a verde. 23. Quando o Ponto 4 estiver a piscar a vermelho, prima a seta da esquerda e diminua o valor em 5˚.
24. Espere que o programa teste e faça a curva de tendência. Verifique que a aceleração diminuiu.
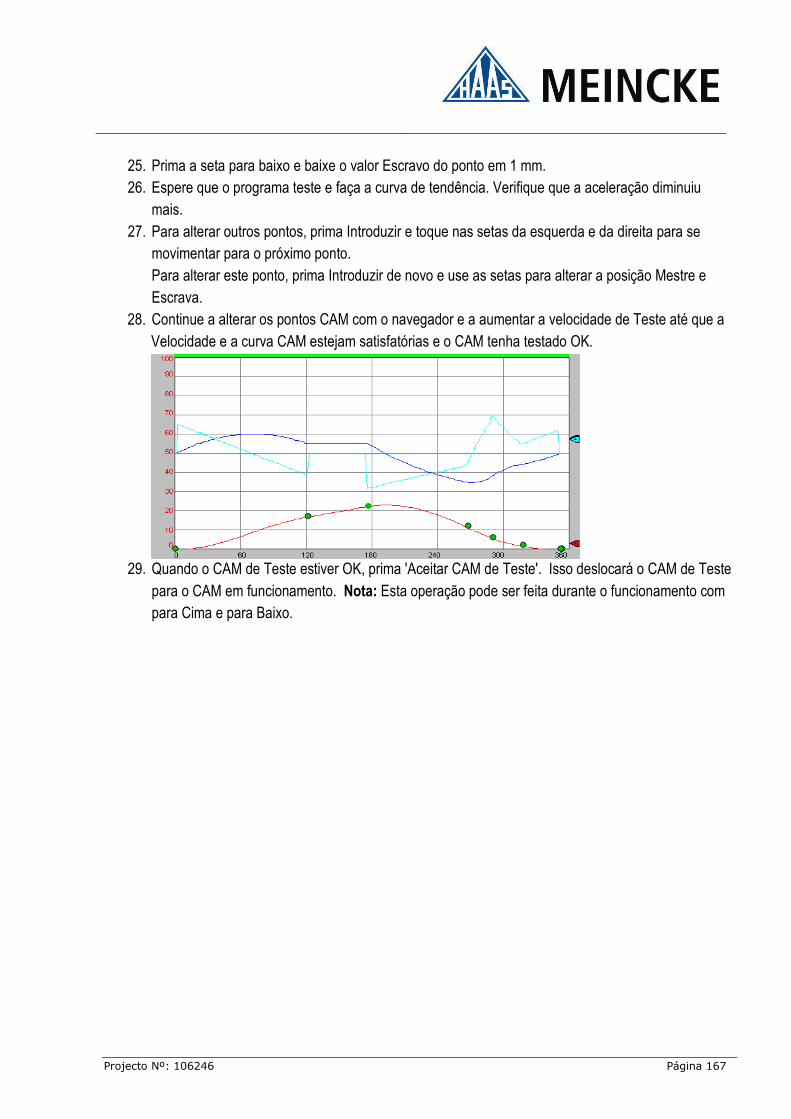
Projecto Nº: 106246 Página 167
25. Prima a seta para baixo e baixe o valor Escravo do ponto em 1 mm. 26. Espere que o programa teste e faça a curva de tendência. Verifique que a aceleração diminuiu
mais. 27. Para alterar outros pontos, prima Introduzir e toque nas setas da esquerda e da direita para se
movimentar para o próximo ponto. Para alterar este ponto, prima Introduzir de novo e use as setas para alterar a posição Mestre e Escrava.
28. Continue a alterar os pontos CAM com o navegador e a aumentar a velocidade de Teste até que a Velocidade e a curva CAM estejam satisfatórias e o CAM tenha testado OK.
29. Quando o CAM de Teste estiver OK, prima 'Aceitar CAM de Teste'. Isso deslocará o CAM de Teste
para o CAM em funcionamento. Nota: Esta operação pode ser feita durante o funcionamento com para Cima e para Baixo.

Página 168 Projecto Nº.: 106246
11.4 CONFIGURAÇÕES
A tela abaixo é usada para alterar as configurações de para Cima e para Baixo e é apenas para pessoal de manutenção.
11.4.1 LIMITE MÁXIMO DE VELOCIDADE.
A velocidade máxima para a unidade para Cima e para Baixo. No modo Automático, não é possível introduzir um valor mais alto que esta velocidade máxima. No modo de projecção Manual de CAM, o sistema usa este valor quando está a testar o perfil de CAM. O limite é usado para proteger o equipamento mecânico.
11.4.2 LIMITE DE ACEL. MÁXIMA NO MODO CAM
Aqui é possível ajustar o movimento de aceleração do servomotor para o equipamento em modo CAM. É ajustável de 0 a 100% da velocidade de aceleração máxima possível. Nota: Se configurar esta velocidade demasiado baixa, isso pode fazer como que o equipamento fique tão lento que não consegue chegar à posição requerida no modo CAM. Um valor padrão é aproximadamente entre 80 e 100%.
11.4.3 LIMITE DE ACEL. MÁXIMA NO MODO AUTO.
Aqui é possível ajustar o movimento de aceleração do servomotor para o equipamento em modo Automático. É ajustável de 0 a 100% da velocidade de aceleração máxima possível.

Projecto Nº: 106246 Página 169
Nota: Se configurar esta velocidade demasiado baixa, isso pode fazer como que o equipamento fique tão lento que não consegue chegar à posição requerida no modo Automático. Um valor padrão é aproximadamente entre 80 e 100%.
11.4.4 TOLERÂNCIA DE ERRO DE POSIÇÃO
Esta configuração permite-lhe ajustar quando o alarme tem de aparecer. A 'tolerância de erro de posição' irá parar o servomotor quando o desvio entre a posição actual e a requerida se torna maior que o valor introduzido no campo, e isto resultará num alarme para o equipamento. A tolerância de erro de posição pode funcionar como uma protecção de falha mecânica durante o funcionamento, mas apenas se o valor não exceder a força mecânica para o equipamento. Um valor padrão é aproximadamente entre 0,5 e 20. Nota. Se estiver configurado demasiado baixo, um alarme aparecerá mesmo que não tenha ocorrido nenhuma falha durante o funcionamento. Nota. Se estiver configurado demasiado alto, um alarme não aparecerá mesmo que tenha ocorrido uma falha durante o arranque do equipamento.
11.4.5 LIMITE MÁXIMO DE VIAGEM DO CORTADOR (OPCIONAL)
Aqui é possível configurar o limite de deslocação Máximo (software) para o equipamento em modo Cortador. Consulte a secção Operação. A função é usada para proteger o equipamento mecânico configurando um alarme e parando o servomotor se o equipamento tentar deslocar-se para além deste ponto. Nota. Para determinar este valor, use sempre o botão de deslocação. Isso minimiza o risco de danos ao equipamento. Um valor padrão é aproximadamente entre 80 e 100 mm. Activar ou Desactivar Pode desactivar/activar esta função premindo o botão Activar/Desactivar. Se estiver desactivado, não aparecerá nenhum alarme, e o servomotor pode deslocar-se para além do limite máximo de deslocação.
Podem ocorrer danos ao equipamento se o operador desactivar o sistema de limite
de Deslocamento durante o funcionamento.
11.4.6 LIMITE MÁXIMO DE VIAGEM DO TRANSPORTADOR (OPCIONAL)
Aqui é possível configurar o limite de deslocação Máximo (software) para o equipamento em modo Transportador. Consulte a secção Operação. A função é usada para proteger o equipamento configurando um alarme e parando o servomotor se o equipamento tentar deslocar-se para além deste ponto. Nota. Para determinar este valor, use sempre o botão de deslocação. Isso minimiza o risco de danos ao equipamento. Um valor padrão é aproximadamente entre 40 e 50 mm.
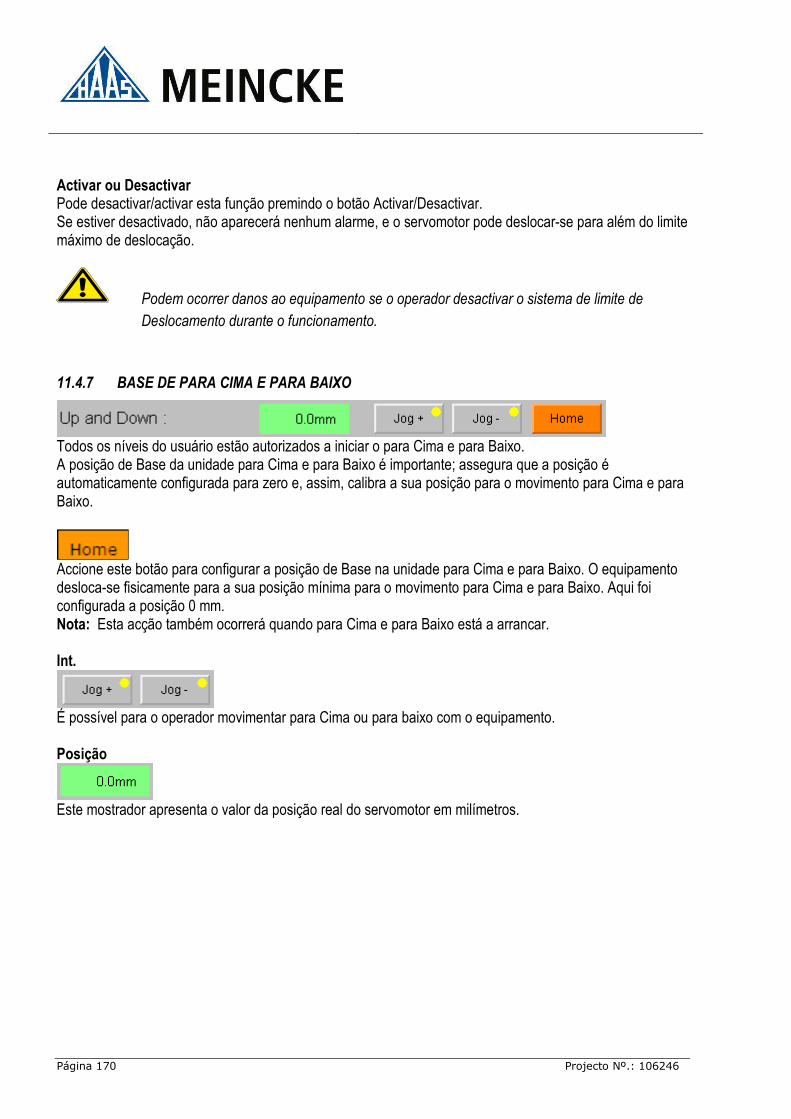
Página 170 Projecto Nº.: 106246
Activar ou Desactivar Pode desactivar/activar esta função premindo o botão Activar/Desactivar. Se estiver desactivado, não aparecerá nenhum alarme, e o servomotor pode deslocar-se para além do limite máximo de deslocação.
Podem ocorrer danos ao equipamento se o operador desactivar o sistema de limite de
Deslocamento durante o funcionamento.
11.4.7 BASE DE PARA CIMA E PARA BAIXO
Todos os níveis do usuário estão autorizados a iniciar o para Cima e para Baixo. A posição de Base da unidade para Cima e para Baixo é importante; assegura que a posição é automaticamente configurada para zero e, assim, calibra a sua posição para o movimento para Cima e para Baixo.
Accione este botão para configurar a posição de Base na unidade para Cima e para Baixo. O equipamento desloca-se fisicamente para a sua posição mínima para o movimento para Cima e para Baixo. Aqui foi configurada a posição 0 mm. Nota: Esta acção também ocorrerá quando para Cima e para Baixo está a arrancar. Int.
É possível para o operador movimentar para Cima ou para baixo com o equipamento. Posição
Este mostrador apresenta o valor da posição real do servomotor em milímetros.

Projecto Nº: 106246 Página 171
11.4.8 TENDÊNCIA PARA CIMA E PARA BAIXO
Para uma descrição detalhada da tendência consulte o capítulo 3.9.2 Evolução da máquina

Página 172 Projecto Nº.: 106246
11.5 LIMPEZA
No modo Limpeza, para Cima e para Baixo podem ser deslocados e voltar à posição inicial ao limpar a Cabeça Depositadora. Consulte também o capítulo 3.7 Limpeza para mais informações sobre a operação de limpeza em geral.
Prima este botão para movimentar para a frente.
Prima este botão para movimentar para trás.
Prima este botão para voltar à posição inicial. Por favor, consulte a secção 'Base de para cima e para baixo'
A posição actual da unidade para Cima e para Baixo é exibida.
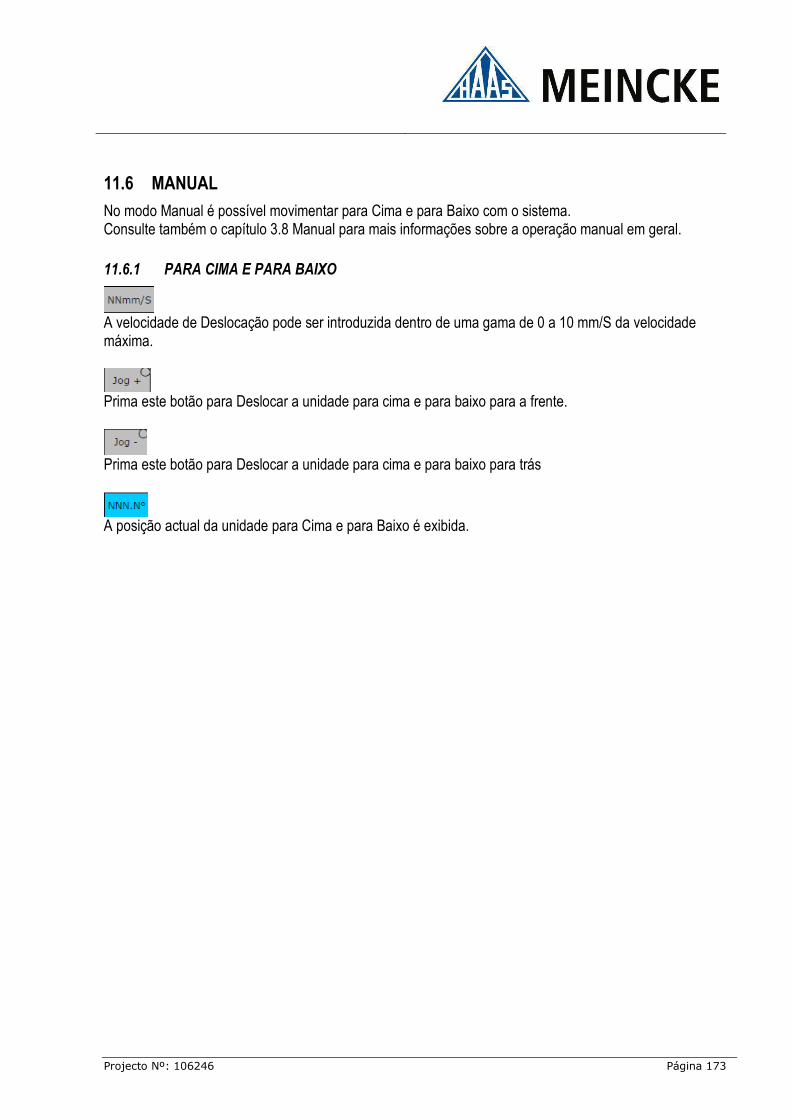
Projecto Nº: 106246 Página 173
11.6 MANUAL
No modo Manual é possível movimentar para Cima e para Baixo com o sistema. Consulte também o capítulo 3.8 Manual para mais informações sobre a operação manual em geral.
11.6.1 PARA CIMA E PARA BAIXO
A velocidade de Deslocação pode ser introduzida dentro de uma gama de 0 a 10 mm/S da velocidade máxima.
Prima este botão para Deslocar a unidade para cima e para baixo para a frente.
Prima este botão para Deslocar a unidade para cima e para baixo para trás
A posição actual da unidade para Cima e para Baixo é exibida.

Página 174 Projecto Nº.: 106246
11.7 INFORMAÇÕES DA MÁQUINA
Unidade para Cima e para Baixo não seleccionada Esta informação da Máquina será apresentada quando tentar aceder ao sistema para Cima e para Baixo enquanto 'Não Usado' estiver seleccionado do menu Modo de Operação. Erro da unidade para Cima para Baixo Esta informação da Máquina será exibida pois há uma falha geral para o sistema para Cima e para Baixo. Por favor, consulte o capítulo 'Alarmes' para mais informações. A unidade para Cima para Baixo está a ser movida para a posição de paragem Esta informação da Máquina será apresentada quando o sistema para Cima e para Baixo estiver a ser deslocado para a posição de paragem. Unidade para Cima para Baixo não está no início Esta informação da Máquina será apresentada quando o sistema para Cima e para Baixo estiver tentou voltar ao início e não conseguiu. A velocidade da máquina foi limitada pela unidade para Cima para Baixo Esta informação da Máquina será apresentada quando a Velocidade da Máquina [RPM] se torna mais alta que a velocidade máxima [RPM] do sistema de para Cima e para Baixo
Projecto Nº: 106246 Página 175
11.8 ALARMES
Alarme 02000 Falha do eixo do servo na unidade para Cima para baixo Acção: Verifique os bujões e o controlador servo no motor e reinicie Alarme 02001 Detector de proximidade de paragem de posição da unidade para Cima para baixo não activado durante o funcionamento Acção: Verifique a rotação e o interruptor de proximidade do servomotor Alarme 02002 O limite de deslocação máximo da unidade para Cima para baixo para o CORTADOR foi activado Acção: Verifique a posição máxima da unidade e o equipamento de Base Alarme 02003 A tolerância de Erro de Posição da unidade para Cima para baixo foi activado Acção: Verifique se há fricção na unidade e o equipamento de Base Alarme 02004 A unidade para Cima para baixo não está no início, a Posição precisa de ser aproximadamente 0 mm Acção: Por favor, retorne o equipamento ao início premindo base Alarme 02005 O limite de deslocação máximo da unidade para Cima para baixo para o TRANSPORTADOR foi activado Acção: Verifique a posição máxima da unidade e o equipamento de Base

Página 176 Projecto Nº.: 106246
Projecto Nº: 106246 Página 177
12 GUILHOTINA A Guilhotina é usada para cortar a massa extrudada no transportador em produtos de comprimento igual. A guilhotina está a cortar com uma lâmina de corte redonda de 360˚. A posição de paragem é aos 0˚ e é também a posição de topo.
12.1 OPERAÇÃO
O aspecto da tela da Guilhotina em produção depende do modo seleccionado. Existem 3 modos diferentes de controlo da Guilhotina. Cada modo está listado abaixo e os seguintes capítulos descrevem cada modo. Nota: Alguns dos modos são opcionais. Nota: Se o modo de Guilhotina “Não usado” estiver seleccionado é possível desconectar as fichas do Servomotor para a Guilhotina.
12.2 GUILHOTINA EM GERAL
A seguinte descrição aplica-se a todos os modos de Guilhotina.
12.2.1 POS. GUILHOTINA
“Pos.” apresenta a posição actual da Guilhotina entre 0 e 360˚.
12.2.2 VELOCIDADE DA GUILHOTINA
“Velocidade” apresenta a velocidade actual da Guilhotina em CPM (Cortes por minuto).
12.2.3 COMPRIMENTO DO PRODUTO DA GUILHOTINA
“Comprimento do produto real” está a apresentar o comprimento do Produto em mm (milímetros). Nota: Alteração do Comprimento do Produto, consulte o capítulo 10.5 Ligado à máquina.
12.2.4 DESLOQUE COM A GUILHOTINA:
Int. +: Prima este botão para deslocar a Guilhotina para a frente. Int. -: Prima este botão para deslocar a Guilhotina para trás. Nota: A velocidade de deslocação pode ser alterada no modo Manual. Consulte o Capítulo 12.8 Manual.
12.2.5 IMPULSO ZERO E SISTEMA SERVO
Dependendo do sistema servo, a posição actual pode ser desconhecida para o controlador da PLC. Se assim for o estado do impulso zero da Guilhotina é então visualizado na tela da Guilhotina. O sistema está então a utilizar o impulso zero da Guilhotina para se coordenar e sincronizar com a Máquina.

Página 178 Projecto Nº.: 106246
12.3 AUTOMÁTICO
Neste modo, a Guilhotina está a funcionar como “escrava” em relação à Máquina, isto é, a velocidade da Máquina define o número de Fileiras por minuto que a guilhotina está a cortar. No modo automático, a Guilhotina irá virar-se X graus quando a posição da Máquina se encontrar entre as posições inicial e de paragem introduzidas.
A Guilhotina possui um limite de velocidade máxima No lado direito da tela, é apresentado o valor de graus máximo que a Guilhotina se pode virar com a velocidade da Máquina, a posição Inicial e a posição de Paragem actualmente introduzidas. Veja acima. Aumentar a velocidade da Máquina irá reduzir o valor de graus Máx. Reduzir a distância entre a posição inicial e a posição de paragem irá baixar o valor de graus Máx. Nota: A posição “Inicial” pode ser superior à posição de paragem, uma vez que a Guilhotina se desenrola a 360˚. Ao utilizar este modo, configure o valor de graus para 360˚ para que a Guilhotina rode 360˚ a cada volta da Máquina. Podem ser introduzidos outros valores.
12.3.1 “INÍCIO DA GUILHOTINA” E “PARAGEM DA GUILHOTINA”
“Início da Guilhotina” e “Paragem da Guilhotina” são utilizados para a introdução do período de tempo em que a Guilhotina deve funcionar. Ou seja, a Guilhotina irá mover a respectiva volta de graus quando a posição da Máquina se encontrar entre as posições “Iniciar Guilhotina” e “Parar Guilhotina”. Por exemplo, se a velocidade da “Máquina” for configurada para 60 RPM, “Iniciar Guilhotina” para 100, “Parar Guilhotina” para 280˚ e “Graus” para 360˚, a Guilhotina irá mover-se 360˚ para a frente quando a posição da Máquina se encontrar entre 100˚ e 280˚ e será imobilizada quando a posição da Máquina se encontrar entre 280˚ e 100˚. A velocidade durante este período será de 720˚/Seg. = 120 CPM. De forma a manter a sincronização com a Máquina, o período de imobilização resulta numa elevada velocidade de corte que, uma vez mais, permite um corte rectilíneo da massa. Nota: A alteração da velocidade da Máquina irá aumentar a velocidade de corte.

Projecto Nº: 106246 Página 179
12.3.2 “GRAUS DA GUILHOTINA”
Utilize a predefinição para introduzir a distância que pretende que a Guilhotina se mova. Normalmente, para Automática, este valor será de 360˚.
12.3.3 “GRAUS MÁX. DA GUILHOTINA”
O valor apresentado representa o valor máximo que pode ser introduzido em “Graus da Guilhotina”. O cálculo é baseado nos seguintes valores: Velocidade da Máquina, posições de início e paragem da Guilhotina e a velocidade máxima para a Guilhotina. Nota: Se o valor introduzido em “Graus da Guilhotina” for superior ao Máximo de graus, será apresentado um aviso e a Guilhotina será movida apenas pelo valor introduzido em “Máx. de Graus”.

Página 180 Projecto Nº.: 106246
12.4 CONTÍNUO
Neste modo a Guilhotina está a trabalhar independentemente, o que significa que alterar a velocidade da Máquina não afectará a velocidade da Guilhotina.
12.4.1 VELOCIDADE DA GUILHOTINA
Pode ser introduzida a velocidade da Guilhotina em CPM (Cortes por minuto). O limite da velocidade varia dependendo da Aplicação.

Projecto Nº: 106246 Página 181
12.5 LIGADO AO MESTRE
No modo “Guilhotina ligada ao Mestre” a Guilhotina está ligada à Máquina (o mestre) com um rácio de 1:1. Ou seja, a velocidade da Guilhotina será igual à velocidade da Máquina em fileiras por minuto (RPM, do inglês “rows per minute”). Uma rotação da Guilhotina é equivalente a 360˚. A Guilhotina é sincronizada com a Máquina e o respectivo desvio pode ser ajustado. Este modo é aconselhável quando a Máquina se encontra em funcionamento rápido
12.5.1 DESLOCAÇÃO GUILHOTINA:
Com este ponto de definição, é possível ajustar o desvio da posição entre a posição da Máquina e a da Guilhotina. O valor de desvio pode ser introduzido entre 0 e 360˚.
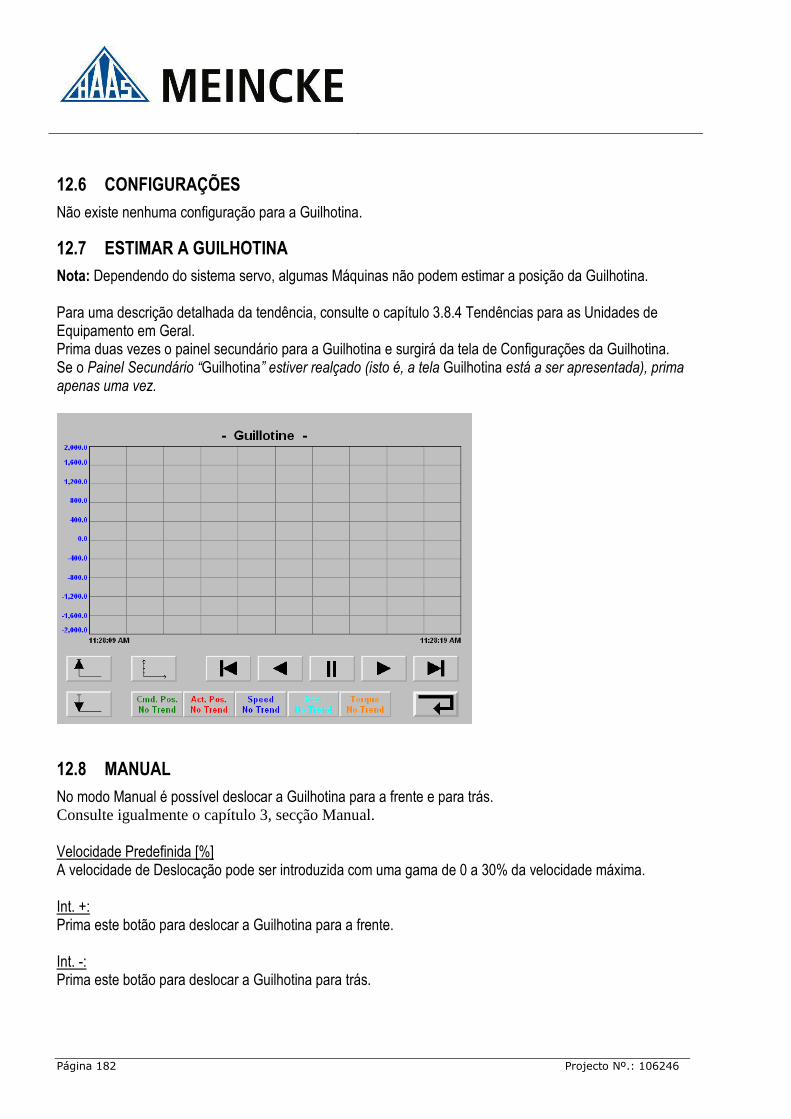
Página 182 Projecto Nº.: 106246
12.6 CONFIGURAÇÕES
Não existe nenhuma configuração para a Guilhotina.
12.7 ESTIMAR A GUILHOTINA
Nota: Dependendo do sistema servo, algumas Máquinas não podem estimar a posição da Guilhotina. Para uma descrição detalhada da tendência, consulte o capítulo 3.8.4 Tendências para as Unidades de Equipamento em Geral. Prima duas vezes o painel secundário para a Guilhotina e surgirá da tela de Configurações da Guilhotina. Se o Painel Secundário “Guilhotina” estiver realçado (isto é, a tela Guilhotina está a ser apresentada), prima apenas uma vez.
12.8 MANUAL
No modo Manual é possível deslocar a Guilhotina para a frente e para trás. Consulte igualmente o capítulo 3, secção Manual. Velocidade Predefinida [%] A velocidade de Deslocação pode ser introduzida com uma gama de 0 a 30% da velocidade máxima. Int. +: Prima este botão para deslocar a Guilhotina para a frente. Int. -: Prima este botão para deslocar a Guilhotina para trás.

Projecto Nº: 106246 Página 183
Posição actual da Guilhotina: Este campo apresenta a posição actual da Guilhotina.
12.9 INFORMAÇÕES DA MÁQUINA
Reduza o movimento da Guilhotina A informação da máquina anterior será apresentada no modo “Automático” ou “Avançado”, se o movimento “Graus Guilhotina” for superior a “Graus Máx. da Guilhotina”. Aumente o movimento da base da Guilhotina A informação da máquina anterior será apresentada no modo “Avançado” (Opcional) se o movimento “Graus base da Guilhotina” for superior a “Graus Máx. da base da Guilhotina”. A Guilhotina deve estar na posição superior Esta informação da máquina aparecerá se se iniciar a guilhotina quando esta não está na posição parada (Posição superior). A Guilhotina irá deslocar-se para a posição de paragem e parar. Iniciar a guilhotina de novo e esta funcionará normalmente. Bujão da Guilhotina não inserido O bujão eléctrico da guilhotina não está conectado. Velocidade da máquina limitada pela unidade da Guilhotina Pode ocorrer quando a Guilhotina está engatada à Máquina e a velocidade da Máquina introduzida é superior ao máximo da Guilhotina. A mover Guilhotina para a posição de paragem A Guilhotina está a ser movida para a respectiva posição de paragem. A posição de paragem do alicate de corte eléctrico é igual à posição inicial se o modo Automático ou Avançado estiverem seleccionados e se a posição de paragem = “0˚” estiver seleccionada no modo ligado para a Máquina. Nenhum modo de Guilhotina seleccionado A Informação da Máquina acima indicada será exibida se a Guilhotina tiver tentado arrancar sem estar seleccionada.
12.10 ALARMES
Alarme 481 Falha do eixo do servo na Guilhotina Acção: Verifique os bujões e o controlador servo no motor e reinicie Alarme 482 O detector de proximidade de paragem de posição da Guilhotina não está a ser activado durante o funcionamento Acção: Verifique o detector de proximidade

Página 184 Projecto Nº.: 106246

Projecto Nº: 106246 Página 185
13 UNIDADE DE ASPERSÃO A unidade de aspersão é um equipamento acessório e está assim localizado sob os acessórios.
13.1 OPERAÇÃO
A tela da unidade de aspersão em produção depende do modo seleccionado. Todos os modos estão listados abaixo e os seguintes capítulos descrevem cada modo. É ainda possível escolher Unidade de Aspersão Não Usada.
13.2 CONTÍNUO
Velocidade da Unidade de Aspersão Introduza a velocidade da unidade de aspersão de 10 a 100% premindo o botão.
13.3 INFORMAÇÕES DA MÁQUINA
Nenhum modo de unidade de Aspersão seleccionado A informação da Máquina anterior será exibida se o operador estiver a tentar dar início à unidade de Aspersão e esta unidade não estiver seleccionada.

Página 186 Projecto Nº.: 106246
Erro da unidade de Aspersão A informação da máquina acima será exibida por haver uma falha geral na unidade de aspersão. Consulte o capítulo 13.4 Alarmes.
13.4 ALARMES
Alarme 833 Disjuntor do circuito da unidade de aspersão desarmou Acção: Verifique o disjuntor do circuito e reinicie Alarme 834 Falha no conversor de frequência da unidade de Aspersão Acção: Verifique o conversor de frequência e reinicie
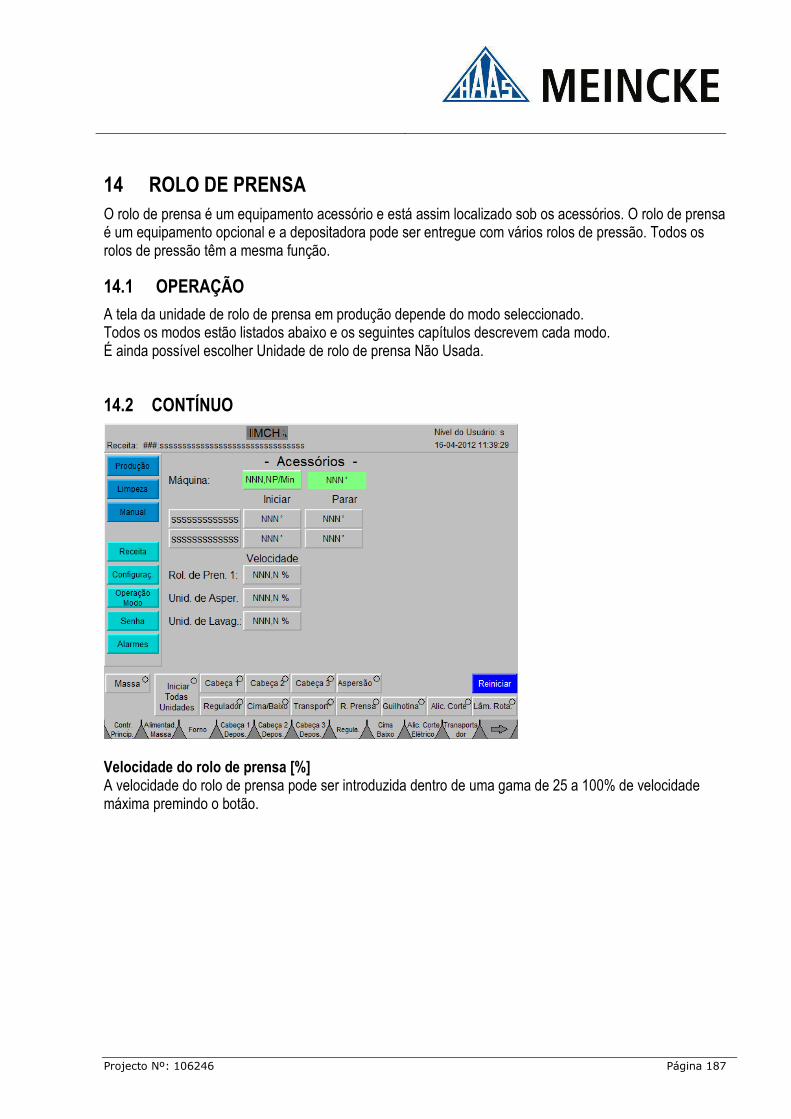
Projecto Nº: 106246 Página 187
14 ROLO DE PRENSA O rolo de prensa é um equipamento acessório e está assim localizado sob os acessórios. O rolo de prensa é um equipamento opcional e a depositadora pode ser entregue com vários rolos de pressão. Todos os rolos de pressão têm a mesma função.
14.1 OPERAÇÃO
A tela da unidade de rolo de prensa em produção depende do modo seleccionado. Todos os modos estão listados abaixo e os seguintes capítulos descrevem cada modo. É ainda possível escolher Unidade de rolo de prensa Não Usada.
14.2 CONTÍNUO
Velocidade do rolo de prensa [%] A velocidade do rolo de prensa pode ser introduzida dentro de uma gama de 25 a 100% de velocidade máxima premindo o botão.

Página 188 Projecto Nº.: 106246
14.3 MANUAL
No modo Manual é possível movimentar para a frente com o rolo de prensa. Consulte igualmente o capítulo 3.7 Manual. Velocidade Predefinida [%] A velocidade de Deslocação pode ser introduzida com uma gama de 25 a 100% da velocidade máxima. Int. +: Prima este botão para movimentar para a frente com o rolo de prensa. Int. -: Prima este botão para movimentar para trás com o rolo de prensa.
14.4 INFORMAÇÕES DA MÁQUINA
Nenhum modo de rolo de prensa seleccionado A informação da Máquina anterior será exibida se o operador estiver a tentar dar início ao rolo de prensa e esta unidade não estiver seleccionada. Erro do rolo de prensa A informação da máquina acima será exibida por haver uma falha geral no rolo de prensa. Consulte o capítulo 13.4 Alarmes.
14.5 ALARMES
Alarme 609 : O disjuntor mecânico do rolo de prensa disparou Acção: Verifique o disjuntor do circuito e reinicie Alarme 610 : Falha no conversor de frequência do rolo de prensa Acção: Verifique o conversor de frequência e reinicie
Projecto Nº: 106246 Página 189
15 LÂMINA ROTATIVA Este alicate de corte Eléctrico ou alicate de corte Mecânico pode ser equipado com uma lâmina rotativa. Nota: Neste capítulo todas as descrições e ilustrações se referem à uma lâmina rotativa montada num alicate de corte eléctrico. Todavia, a descrição aplica-se também à lâmina rotativa montada num alicate de corte mecânico. A lâmina é uma alternativa ao arame de um alicate de corte tradicional. A faca da lâmina é deslocada de um lado para o outro por forma a melhorar o corte do produto. A velocidade do movimento de um lado para o outro pode ser introduzida.
15.1 OPERAÇÃO
Se a unidade da lâmina rotativa, a Velocidade será activada para a operação se esta estiver seleccionada no modo de Operação. Podem ser seleccionados dois modos: Lâmina Rotativa: Não usada Lâmina Rotativa: Contínua

Página 190 Projecto Nº.: 106246
15.2 PRODUÇÃO
Localize o ponto de definição da lâmina rotativa no canto superior direito da tela. Nota: O ponto de definição da lâmina rotativa será apenas visível se lâmina rotativa estiver seleccionado em modo de operação. O ponto de definição da lâmina rotativa pode ser alterado de 0 a 100%.
Projecto Nº: 106246 Página 191
15.3 MANUAL
No modo Manual é possível movimentar para a frente e para trás com a lâmina rotativa. Consulte igualmente o capítulo 3.7. Manual. . Velocidade Predefinida [%] A velocidade de Deslocação pode ser introduzida com uma gama de 0 a 25% da velocidade máxima. Int. +: Prima este botão para movimentar para a frente com a lâmina rotativa. Int. -: Prima este botão para movimentar para trás com a lâmina rotativa.
15.4 INFORMAÇÕES DA MÁQUINA
Erro da lâmina rotativa A informação da máquina acima será exibida por haver uma falha geral na lâmina rotativa. Consulte o capítulo 23.5 Alarmes Nenhum modo seleccionado para a lâmina rotativa A informação da Máquina anterior será exibida se o operador estiver a tentar dar início à Lâmina Rotativa e esta unidade não estiver seleccionada.
15.5 ALARMES
Alarme 641 O disjuntor mecânico da Lâmina Rotativa disparou Acção: Verifique o disjuntor do circuito e reinicie Alarme 642 Falha no conversor de frequência da Lâmina Rotativa Acção: Verifique o conversor de frequência e reinicie

Página 192 Projecto Nº.: 106246
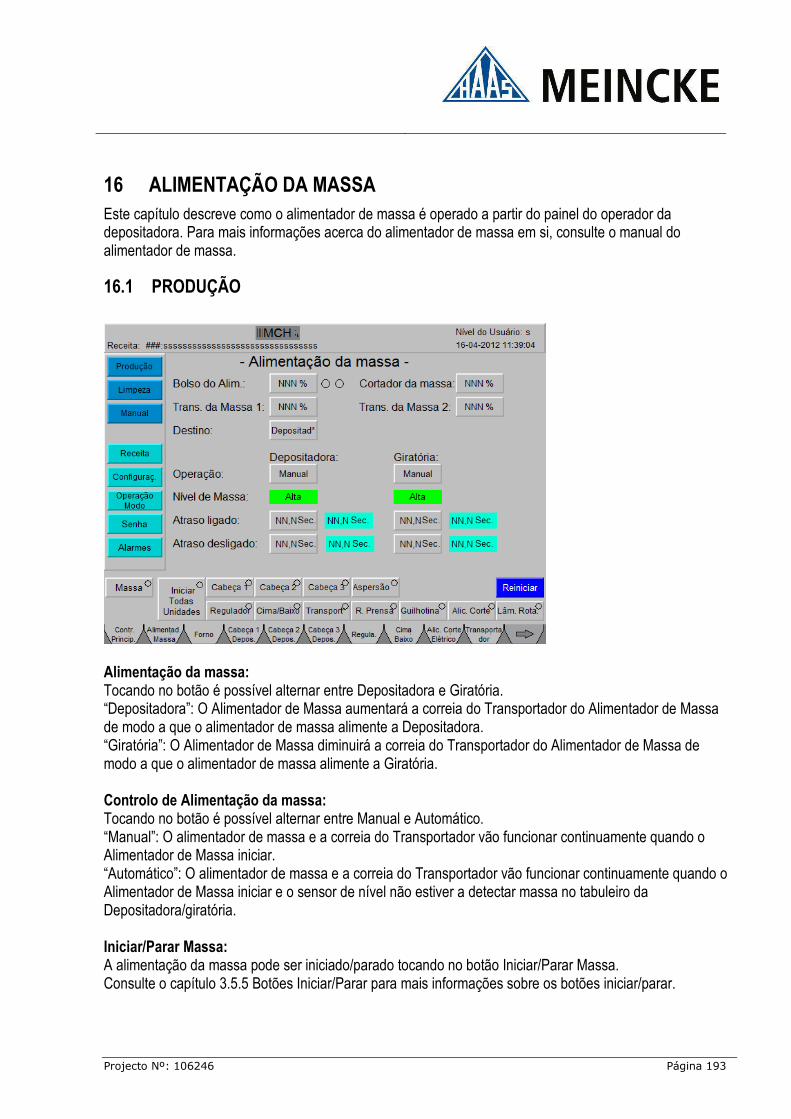
Projecto Nº: 106246 Página 193
16 ALIMENTAÇÃO DA MASSA Este capítulo descreve como o alimentador de massa é operado a partir do painel do operador da depositadora. Para mais informações acerca do alimentador de massa em si, consulte o manual do alimentador de massa.
16.1 PRODUÇÃO
Alimentação da massa: Tocando no botão é possível alternar entre Depositadora e Giratória. “Depositadora”: O Alimentador de Massa aumentará a correia do Transportador do Alimentador de Massa de modo a que o alimentador de massa alimente a Depositadora. “Giratória”: O Alimentador de Massa diminuirá a correia do Transportador do Alimentador de Massa de modo a que o alimentador de massa alimente a Giratória. Controlo de Alimentação da massa: Tocando no botão é possível alternar entre Manual e Automático. “Manual”: O alimentador de massa e a correia do Transportador vão funcionar continuamente quando o Alimentador de Massa iniciar. “Automático”: O alimentador de massa e a correia do Transportador vão funcionar continuamente quando o Alimentador de Massa iniciar e o sensor de nível não estiver a detectar massa no tabuleiro da Depositadora/giratória. Iniciar/Parar Massa: A alimentação da massa pode ser iniciado/parado tocando no botão Iniciar/Parar Massa. Consulte o capítulo 3.5.5 Botões Iniciar/Parar para mais informações sobre os botões iniciar/parar.
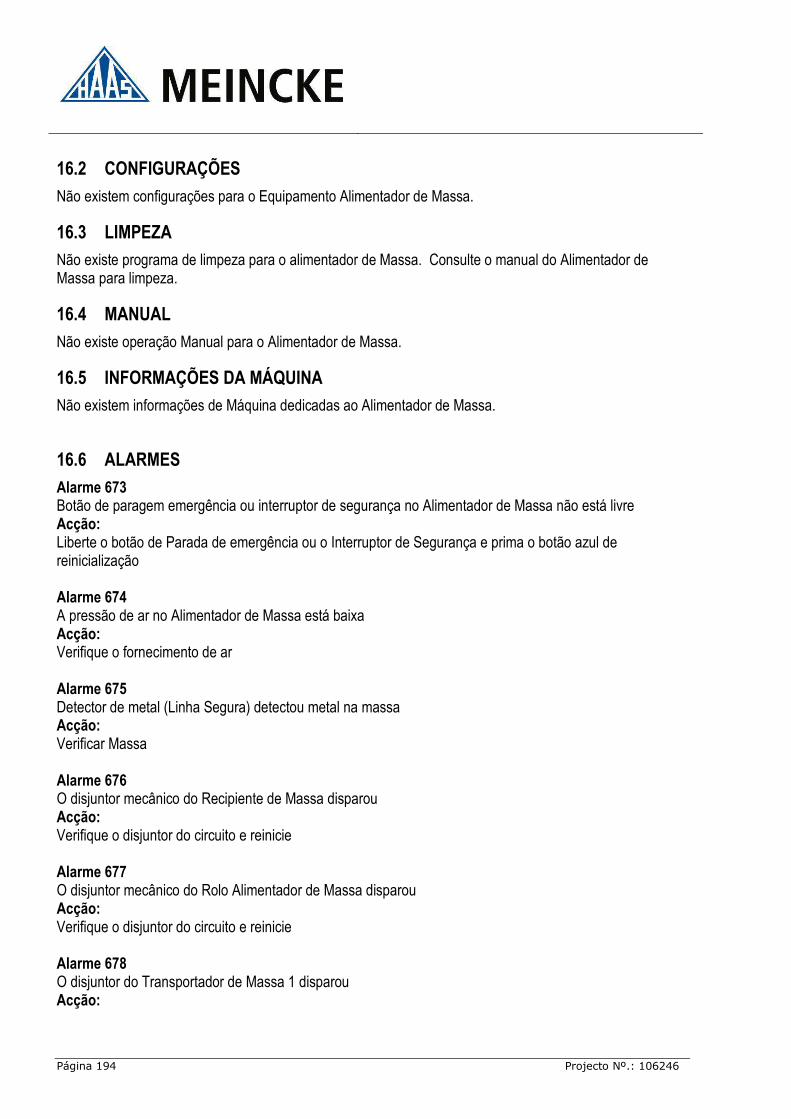
Página 194 Projecto Nº.: 106246
16.2 CONFIGURAÇÕES
Não existem configurações para o Equipamento Alimentador de Massa.
16.3 LIMPEZA
Não existe programa de limpeza para o alimentador de Massa. Consulte o manual do Alimentador de Massa para limpeza.
16.4 MANUAL
Não existe operação Manual para o Alimentador de Massa.
16.5 INFORMAÇÕES DA MÁQUINA
Não existem informações de Máquina dedicadas ao Alimentador de Massa.
16.6 ALARMES
Alarme 673 Botão de paragem emergência ou interruptor de segurança no Alimentador de Massa não está livre Acção: Liberte o botão de Parada de emergência ou o Interruptor de Segurança e prima o botão azul de reinicialização Alarme 674 A pressão de ar no Alimentador de Massa está baixa Acção: Verifique o fornecimento de ar Alarme 675 Detector de metal (Linha Segura) detectou metal na massa Acção: Verificar Massa Alarme 676 O disjuntor mecânico do Recipiente de Massa disparou Acção: Verifique o disjuntor do circuito e reinicie Alarme 677 O disjuntor mecânico do Rolo Alimentador de Massa disparou Acção: Verifique o disjuntor do circuito e reinicie Alarme 678 O disjuntor do Transportador de Massa 1 disparou Acção:

Projecto Nº: 106246 Página 195
Verifique o disjuntor do circuito e reinicie Alarme 679 O disjuntor do Transportador de Massa 2 disparou Acção: Verifique o disjuntor do circuito e reinicie Alarme 680 O disjuntor do detector de Metal na Massa disparou Acção: Verifique o disjuntor do circuito e reinicie Alarme 681 Falha no conversor de frequência do Recipiente de Massa Acção: Verifique o conversor de frequência e reinicie Alarme 682 Falha no conversor de frequência do Transportador 1 do Alimentador de Massa Acção: Verifique o conversor de frequência e reinicie Alarme 683 Falha de comunicação com o Alimentador de Massa Acção: Verifique a Ligação entre a Depositadora e o Alimentador de Massa Alarme 684 Controlo da esteira no Transportador 1 do Alimentador de Massa se encontra fora do limite Acção: Verifique sensores e válvulas solenóides Alarme 685 Controlo da esteira no Transportador 1 do Alimentador de Massa se encontra fora do limite Acção: Verifique sensores e válvulas solenóides
![USB AUDIO INTERFACE - Steinberg · 2020-03-04 · Controles e terminais do painel Manual de operação do UR242 5 Painel traseiro 1[ ] Chave (Standby/ligada) Liga o dispositivo (O)](https://static.fdocument.pub/doc/165x107/5f36bf865fdf1f0f3c35e98a/usb-audio-interface-steinberg-2020-03-04-controles-e-terminais-do-painel-manual.jpg)

















