DEKLARACJA CED DLA OPERACJI ROBOTOWYCH … · W kwietniu 2011 roku do Wrocławia na zaproszenie...
39
ul. H.M. Kamieńskiego 73 a 51-124 Wrocław e-mail. [email protected] NIP: 895-16-45-574 REGON: 000977893 tel. + 48 713270101 fax. + 48713254101 CED WSS-OBR - PROJEKT - Strona 1 z 39 - DEKLARACJA CED DLA OPERACJI ROBOTOWYCH Wojewódzki Szpital Specjalistyczny we Wrocławiu Ośrodek Badawczo - Rozwojowy Wrocław 22 września 2016 prof. Wojciech Witkiewicz [email protected] dr inż. Magda Przybyło | [email protected] dr inż. Wojciech Jopek | [email protected] dr n. med. Marek Zawadzki
Transcript of DEKLARACJA CED DLA OPERACJI ROBOTOWYCH … · W kwietniu 2011 roku do Wrocławia na zaproszenie...
ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 1 z 39 -
DEKLARACJA CED DLA OPERACJI ROBOTOWYCH
Wojewódzki Szpital Specjalistyczny we Wrocławiu
Ośrodek Badawczo - Rozwojowy
Wrocław 22 września 2016
prof. Wojciech Witkiewicz [email protected]
dr inż. Magda Przybyło | [email protected]
dr inż. Wojciech Jopek | [email protected] dr n. med. Marek Zawadzki

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 2 z 39 -
SPIS TREŚCI
WSTĘP ................................................................................................................................................... 3Chirurgia robotowa w Wojewódzkim Szpitalu Specjalistycznym we Wrocławiu Ośrodku Badawczo -
Rozwojowym ....................................................................................................................................... 3Opis procedury ................................................................................................................................... 8
DEFINICJA PROFILU DOWODU MEDYCZNEGO ............................................................................... 9PRZEGLĄD LITERATURY NAUKOWEJ ............................................................................................ 12Chirurgia ginekologiczna ................................................................................................................... 12Chirurgia ogólna ................................................................................................................................. 16
Operacje bariatryczne ....................................................................................................................... 16Fundoplikacja .................................................................................................................................... 17Cholecystektomia ............................................................................................................................. 17Resekcje ogona trzustki .................................................................................................................... 18Resekcja żołądka z powodu nowotworu złośliwego ......................................................................... 18Usunięcie śledziony / Splenectomia ................................................................................................. 19Adrenelectomia ................................................................................................................................. 20Resekcja odbytnicy ........................................................................................................................... 20Chirurgia Pediatryczna ..................................................................................................................... 21
Chirurgia urologiczna ........................................................................................................................ 22Prostatektomia .................................................................................................................................. 22
Krzywa Uczenia .................................................................................................................................. 24OKREŚLANIE POZIOMU AKCEPTOWALNOŚCI NIEPEWNOŚCI - SCHEMAT DLA WSS-OBR ... 26
Prostatektomia .................................................................................................................................. 26Kolektomia ........................................................................................................................................ 26Histerektomia .................................................................................................................................... 27Gastrektomia .................................................................................................................................... 27
IDENTYFIKACJA WSKAZAŃ KLINICZNYCH O OBIECUJĄCYCH WYNIKACH/SKUTKACH ........ 28PLANY BADAWCZO – WDROŻENIOWE: LAPAROSKOPIA "360" ................................................. 29ANALIZA REDUKCJI KOSZTÓW OPERACJI ROBOTOWYCH W WSS-OBR ................................. 32BIBLIOGRAFIA .................................................................................................................................... 37
ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 3 z 39 -
WSTĘP
Chirurgia robotowa w Wojewódzkim Szpitalu Specjalistycznym we Wrocławiu Ośrodku Badawczo - Rozwojowym Wojewódzki Szpital Specjalistyczny, Ośrodek Badawczo Rozwojowy rozpoczął swoją działalność we
wrześniu 1984 roku. Działający w zakresie struktur szpitala oddział chirurgiczny prowadzony przez prof.
dr hab. Wojciecha Witkiewicza, był od samego początku swojego istnienia ważnym ośrodkiem
chirurgicznym nie tylko Wrocławia, ale i Dolnego Śląska. Już od pierwszych dni funkcjonowania pełnił
rolę Oddziału Chirurgii Ogólnej z Pododdziałem Chirurgii Urazowej, Chirurgii Naczyniowej, na którą
składał się Pododdział Transplantacyjny Chirurgii Onkologicznej.
Zespół lekarzy i pielęgniarek stworzony przez prof. W. Witkiewicza, wyróżniał się dbałością o to, aby
pacjenci byli leczeni według najnowszych standardów, i na gruncie chirurgii polskiej, niejednokrotnie
sam te standardy wyznaczał.
Operacje z zastosowaniem technik małoinwazyjnych zostały zapoczątkowane w roku 1992, kiedy to po
raz pierwszy wykonano operację cholecystektomii laparoskopowej. Operację przeprowadził prof.
Wojciech Witkiewicz w asyście zaproszonego profesora Edwarda Stanowskiego. W tym samym roku
wykonano jeszcze 11 takich operacji, a ich liczba w kolejnych latach stale wzrastała, dochodząc nawet
do 300 rocznie. Jednocześnie rozpoczął się trend zmniejszania z roku na rok liczby operacji
przeprowadzanych z dojścia przez laparotomię, jak również liczba konwersji techniki laparoskopowej.
Przez wiele lat cholecystektomia laparoskopowa była jedyną operacją wykonywaną w technice video.
W kolejnych latach do dossier zabiegów przeprowadzanych techniką laparoskopową w zakresie jamy
brzusznej, dołączyły operacje laparoskopii diagnostycznej, appendekotmii, splenektomii, przepuklin
pachwinowych oraz szycia perforowanego wrzodu żołądka.
Ze względu na również naczyniowy profil oddziału, rozpoczęto wykonywanie operacji w obrębie klatki
piersiowej metodą torakoskopową, wykonując sympatektomie piersiowe w przebiegu leczenia
przewlekłego niedokrwienia kończyn górnych, jak również patologicznej nadpotliwości.
Największy przełom w rozwoju chirurgii małoinwazyjnej w naszym szpitalu, nastąpił w roku 2010, kiedy
to za staraniem prof. Wojciecha Witkiewicza , środkami grantu Funduszu Nauki Technologii Polskiej
Ministerstwa Nauki i Szkolnictwa Wyższego został zakupiony jako pierwszy w Polsce system
chirurgiczny da Vinci Si amerykańskiej firmy Intuitive. Jednocześnie zostało powołane do życia Polskie
Towarzystwo Chirurgii Robotowej. Na pierwszego prezesa został wybrany Pan Profesor Wojciech
Witkiewicz. Od momentu założenia Towarzystwa, statutowe zadania to: opracowywanie i wdrażanie
nowych procedur operacyjnych w chirurgii pozostałych dyscyplinach zabiegowych, przy użyciu
zaawansowanych rozwiązań technicznych (robotów chirurgicznych), upowszechnianie wiedzy o
możliwości wykonywania operacji chirurgicznych przy wykorzystaniu robotów chirurgicznych oraz
inicjowanie i wspieranie interdyscyplinarnych badań naukowych i klinicznych. W pierwszym roku
działania Towarzystwa, w dniu 13 grudnia została wykonana pierwsza operacja z użyciem
wrocławskiego robota. Była to operacja prawej hemikolektomii z powodu choroby nowotworowej,
wykonana u 71 letniego mężczyzny. Na tą pionierską operację, do Wrocławia został zaproszony uznany
specjalista chirurgii robotowej, ordynator Oddziału Chirurgii Ogólnej i Onkologicznej z National Hospital

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 4 z 39 -
w Alessandrii we Włoszech - profesor Giuseppe Spinoglio. Korzystając z obecności znamienitego
gościa, wrocławscy chirurdzy przeprowadzili w kolejnym dniu jeszcze dwie operacje prawostronnej
hemikolektomii techniką robotową. W składzie zespołu operacyjnego oprócz profesora Wojciecha
Witkiewicza i profesora Giuseppe Spinoglio był jeszcze doktor Jakub Turek. Kilka dni później zespół
urologów ze Szpitala Wojewódzkiego pod kierunkiem profesora Witkiewicza oraz ordynatora Oddziału
Urologii doktora n. med. Jerzego Sokołowskiego, w asyście doktora Marka Fiutowskiego i dr Lesława
Świebockiego, przy obecności zaproszonego gościa profesora Alexandra Mottrie z OLV Hospital w
Aalst w Belgii, uznanego pioniera chirurgii robotowej w urologii, przeprowadził w dniu 17.12. 2010 roku
pierwsze dwie operacje prostatektomii techniką robotową. Kolejna operacja prostatektomii została
wykonana już następnego dnia. Pierwszym pacjentem poddanym robotowej prostatektomii był 60 letni
mężczyzna z rozpoznanym rakiem prostaty. Kolejnym wyzwaniem, z którym zmierzył się tym razem
zespół ginekologów z Wojewódzkiego Szpitala Specjalistycznego we Wrocławiu, była operacja
histerektomii techniką robotową. Do udziału w tym wydarzeniu został zaproszony profesor Jan Persson
z Skåne University Hospital w Lund w Szwecji. Dwie operacje histerektomii w dniu 17.01.2011 roku
wraz z Profesorem Perssonem, przeprowadzili dr n. med. Jarosław Pająk oraz dr Łukasz Radecki.
Następnego dnia zespół wykonał operację rozszerzonej histerectomii wraz z węzłami miednicy małej.
19 stycznia 2011 roku zespół urologów wykonał już całkowicie samodzielnie, operację prostatectomii
techniką robotową.. Zespołem kierował dr n. med. Jerzy Sokołowski, a chirurgami asystującymi byli dr
Lesław Świebocki i dr Marek Fiutowski. 20 stycznia 2011, zespół chirurgów pod kierunkiem profesora
Wojciecha Witkiewicza wykonał pierwsze operacje cholecystectomii techniką robotową. Asystowali
profesorowi Witkiewiczowi dr Jakub Turek oraz dr Jerzy Banaszek. Operacje cholecystectomii były
bardzo istotne dla systematycznego rozwoju programu robotowego. Pozwalały na nabieranie biegłości
w stosowaniu techniki robotowej, co było niezwykle ważne dla wykonywania bardziej złożonych
procedur w późniejszym czasie. Kolejną procedurą wykonaną całkowicie samodzielnie przez
wrocławskich chirurgów była epinefrektomia w technice robotowej. 10 lutego 2011 roku profesor
Wojciech Witkiewicz wraz z dr Jakubem Turkiem i dr Jerzym Banaszkiem wykonali operację usunięcia
lewego nadnercza u 60 letniego pacjenta. Z kolei 18 lutego 2011 roku zespół ginekologów wrocławskich
wykonał całkowicie samodzielnie operację histerektomii z rozszerzonym usunięciem macicy ze
wskazań onkologicznych. Operował zespół w składzie: dr n. mad. Jarosław Pająk oraz dr Wojciech
Rogala. W marcu 2011 roku do Wojewódzkiego Szpitala Specjalistycznego we Wrocławiu został
zaproszony prof. Petr Stadler z praskiego Szpitala Na Homolce w Republice Czeskiej. Wraz z
zaproszonym gościem zespół chirurgów w składzie: profesor Wojciech Witkiewicz, dr n. med. Wojciech
Iwanowski wykonali techniką robotową operację wszczepienia protezy rozwidlonej aortalno-dwuudowej
u 62 letniego pacjenta cierpiącego na miażdżycę, w lokalizacji aortalno-biodrowej o typie zespołu
Leriche'a. W kwietniu 2011 roku do Wrocławia na zaproszenie profesora Witkiewicza przyjechał ze
Stanów Zjednoczonych polski chirurg praktykujący od wielu lat w Chicago - prof. Sławomir Marecik,
jeden z prekursorów chirurgii robotowej w chirurgii kolorektalnej. Towarzyszył mu chirurg dr n. med.
Marek Zawadzki, z doświadczeniem zdobytym podczas rocznego stażu z zakresu chirurgii robotowej w
School of Medicine, University of Illinois at Chicago. Goście wraz z profesorem Wojciechem

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 5 z 39 -
Witkiewiczem oraz dr n. med. Markiem Rzącą wykonali pierwszą w Polsce operację przedniej resekcji
odbytnicy w technice robotowej. Operację 51 letniego pacjenta mogło na żywo obejrzeć kilkuset
chirurgów, będących uczestnikami XVI Zjazdu Sekcji Videochirurgii Towarzystwa Chirurgów Polskich,
który w dniach 14-15 kwietnia odbywał się w Gdańsku. Operacja była transmitowana na żywo w dniu
15 kwietnia 2011 roku. Kolejną operacją wykonaną w technice robotowej w Wojewódzkim Szpitalu
Specjalistycznym we Wrocławiu była operacja usunięcia śledziony u 52 letniej pacjentki. Zespół w
składzie profesor Wojciech Witkiewicz, dr Jerzy Banaszek oraz dr Jakub Turek operowali pacjentkę w
dniu 19 kwietnia 2011 roku. Pierwsza samodzielna operacja brzusznej resekcji odbytnicy u 56 letniego
pacjenta z rakiem odbytnicy odbyła się pod kierunkiem profesora Wojciecha Witkiewicza w dniu 23
sierpnia 2011 roku. W skład zespołu chirurgicznego wchodzili ponadto dr n. med. Marek Rząca, dr Jerzy
Banaszek oraz dr Jakub Turek. W dniach 12-13 września 2011 roku w ramach działalności statutowej
Polskiego Towarzystwa Chirurgii Robotowej zostały zorganizowane - pierwsze w Polsce-
Międzynarodowe Warsztaty Chirurgii Robotowej. W warsztatach uczestniczyło ponad 30 chirurgów z
czołowych polskich ośrodków. Gośćmi specjalnymi byli ponownie prof.. Sławomir Marecik oraz dr n.
med. Marek Zawadzki, którzy wspólnie z chirurgami z Wojewódzkiego Szpitala Specjalistycznego we
Wrocławiu przeprowadzili w pierwszym dniu warsztatów operację hemikolektomii prawostronnej,
natomiast w dniu drugim operację przedniej resekcji odbytnicy.
Warsztaty spotkały się z ogromnym zainteresowaniem i dużym uznaniem, ponieważ dla większości
przybyłych chirurgów, były pierwszą okazją do zetknięcia się z chirurgią robotową, bezpośrednio na sali
operacyjnej, przy operowanym pacjencie. W sumie od grudnia 2010 roku do końca 2011 roku w Szpitalu
Wojewódzkim we Wrocławiu udało się wykonać techniką robotową 60 operacji, w tym 14
cholecystektomii, 4 przednie resekcje odbytnicy, 1 brzuszno-krzyżowe wycięcie odbytnicy, 2
adrenalektomie nadnercza lewego, 3 splenektomie, 2 hemikolektomie prawostronne, 1 hemikolektomię
lewostronną, 1 resekcje poprzecznicy, 1 implantacje protezy rozwidlonej aortalno-dwuudowej, 24
prostatektomie, 2 operacje całkowitego usunięcia macicy bez przydatków, 2 operacje całkowitego
usunięcia macicy z przydatkami, 1 operację rozszerzonego usunięcia macicy z węzłami chłonnymi, 1
operację usunięcia macicy m. Wertheim i 1 operację zmodyfikowanego rozszerzonego usunięcia
macicy. Rok 2012, oprócz wykonania kolejnych 41 operacji robotowych, zaowocował organizacją I
Międzynarodowego Kongresu Polskiego Towarzystwa Chirurgii Robotowej. Obok czołowych chirurgów,
urologów i ginekologów polskich, czynny udział w Kongresie wzięli również znamienici goście z
zagranicy. Wśród zaproszonych gości byli m.in. prof. Aleksander Mottrie z Aalst - Belgia, prof. Giuseppe
Spinoglio z Alessandrii – Włochy, prof. Petr Stadler z czeskiej Pragi, prof. Jan Persson – z Lund –
Szwecja, prof. Sławomir Marecik z Chicago – USA, dr Jacek Cywiński z Cleveland – USA. W trakcie
kongresu odbyły się sesje chirurgii ogólnej, chirurgii naczyniowej, chirurgii hepatobiliarnej, ginekologii,
urologii oraz anestezjologii. W trakcie trwania kongresu zgromadzeni w Hali Stulecia we Wrocławiu
goście obejrzeli na żywo transmisje z trójwymiarowym przekazem video z 3 operacji całkowitego
usunięcia macicy, usunięcia trzonu macicy oraz prostatektomii techniką robotową.
ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 6 z 39 -
Również w marcu 2012 roku kolejnym sukcesem mógł się cieszyć zespół chirurgiczno-ginekologiczny,
który w dniu 27 marca wykonał pierwszą operację równoczesnego usunięcia en bloc odbytnicy wraz z
macicą. Wskazaniem do operacji był zaawansowany nowotwór odbytnicy naciekający na macicę. W
składzie zespołu operacyjnego byli oprócz profesora Wojciecha Witkiewicza, dr n. med. Marek
Zawadzki, dr n. med. Roman Czarnecki, dr n. med., Jarosław Pająk oraz dr Łukasz Radecki. Kolejnym
etapem rozwoju chirurgii robotowej we Wrocławiu było zastosowanie systemu robotowego w chirurgii
metabolicznej. 19 kwietnia 2012 roku wraz z profesorem Wojciechem Witkiewiczem operację
mankietowej resekcji żołądka w technice robotowej u 160 kilogramowego pacjenta wykonali dr Rafał
Mulek oraz dr n. med. Marek Zawadzki. Kilka miesięcy później 16 października ten sam zespół
chirurgów przy udziale profesora Krzysztofa Paśnika kierownika Kliniki Chirurgii Ogólnej,
Onkologicznej, Metabolicznej i Torakochirugii w Centralnym Szpitalu Klinicznym MON Wojskowego
Instytutu Medycznego w Warszawie, wykonał w technice robotowej pierwszą operację bypass'u
żołądkowego u pacjenta z 3 stopniem otyłości. W trakcie tej operacji oba zespolenia zostały wykonane
jeszcze w technice staplerowej. Ostatecznie rok 2012 podsumowano wykonaniem 42 procedur
robotowych w tym, 3 przednimi resekcjami odbytnicy, 2 przednimi resekcjami odbytnicy z
jednoczasowym usunięciem macicy, 2 brzuszno-krzyżowymi resekcjami odbytnicy,, 4
hemikolektomiami prawostronnymi, 6 splenektomiami, 1 adrenalektomią lewostronną, 5 mankietowymi
resekcjami żołądka, 1 operacją bypass'u żołądkowego, 5 histerektomiami w różnych modyfikacjach oraz
13 prostatektomiami. W roku 2012 w dniach 27-29 września po raz pierwszy chirurdzy ze
Specjalistycznego Szpitala Wojewódzkiego we Wrocławiu, dr n. med. Marek Zawadzki, dr Jakub Turek
na czele z profesorem Wojciechem Witkiewiczem, wzięli udział w 4 -tym Światowym Kongresie Robotyki
Klinicznej i Chirurgicznej Innowacji, który odbywał się w Chicago w Stanach Zjednoczonych. W trakcie
kongresu przedstawili referat pod tytułem: "Wdrożenie pierwszego programu kolorektalnej chirurgii
robotowej w Polsce – wstępne doświadczenia i ograniczenia dla polskiego Narodowego Funduszu
Zdrowia". Profesor Wojciech Witkiewicz w trakcie trwania kongresu został również członkiem CRSA –
Clinical Robotic Surgery Association. Początek roku 2013 został zdominowany przez projekt rodzinnego
przeszczepu nerki od żywego dawcy z pobraniem narządu od członka rodziny. Zanim wykonano ten
pionierski zabieg, zespół chirurgów, anestezjologów i instrumentariuszek odbył szkolenie w Szpitalu
Uniwersyteckim w Nancy we Francji, w klinice prowadzonej przez prof. Jacques'a Hubert'a, wybitnego
specjalistę chirurgii robotowej i transplantacyjnej, innowatora operacji pobierania nerek z
zastosowaniem robota da Vinci, którego zespół od 2002 roku wykonał 150 tego typu zabiegów. Po
powrocie do Polski profesor Witkiewicz wraz z zespołem wykonał w dniach 3 i 4 stycznia 2013 roku 2
operacje usunięcia marskich nerek, co było ostatnim etapem przygotowań do operacji przeszczepu.
W dniu 7 stycznia 2013 roku pod kierunkiem zaproszonego profesora Jacques'a Hubert'a oraz
profesora Wojciecha Witkiewicza zespół chirurgów w składzie: dr n. med. Marek Zawadzki, dr Jakub
Turek i dr n. med. Wojciech Iwanowski przeprowadzili operację pobrania nerki od żywego dawcy, a
następnie drugi zespół chirurgów, w składzie dr n med. Henryk Lisiak, dr Jerzy Banaszek i dr Anna Łoś,
przeszczepił nerkę metodą klasyczną biorcy – 36 letniemu synowi dawczyni. Operacja była szeroko
komentowana w świecie polskiej medycyny i w ogólnopolskich mediach i z pewnością była donośnym
ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 7 z 39 -
głosem poruszającym ideę przeszczepów rodzinnych w Polsce, jak również samej transplantologii.
Kolejną procedurą wykonaną po raz pierwszy techniką robotową w Polsce, była operacja plastyki
wodonercza w przebiegu zwężenia podmiedniczkowego odcinka moczowodu. Operację wykonał zespół
w składzie dr Marek Fiutowski i dr Piotr Bełda w dniu 3 czerwca 2013 roku. Również w czerwcu 2013
roku wykonano pierwszy zabieg usunięcia guza nowotworowego nerki o średnicy 6 cm z
pozostawieniem narządu (NSS). Operację w dniu 17 czerwca przeprowadził zespół w składzie dr M.
Fiutowski, dr Marek Bełda i dr Piotr Bełda. W dniu 17 lipca 2013 roku w Szpitalu Wojewódzkim
przeprowadzono kolejną innowacyjną operację onkologiczną. Zespół chirurgów w składzie dr n. med.
Roman Czarnecki, dr n. med. Marek Zawadzki oraz dr Rafał Mulek, pod kierunkiem profesora Wojciecha
Witkiewicza przeprowadził operację częściowej resekcji żołądka. Z kolei 13 sierpnia 2013 roku po raz
kolejny zmierzono się z operacją bypass'u żołądkowego przeprowadzoną z powodu otyłości. Tym razem
operację przeprowadzoną pod kierunkiem profesora Wojciecha Witkiewicza wykonał zespół chirurgów
w składzie: dr Rafał Mulek, dr Krzysztof Jacyna oraz dr Maciej Liebner. W trakcie operacji ręcznie
techniką robotową zostało wykonane zespolenie żołądkowo-jelitowe. Operację bypass'u żołądkowego,
w trakcie której oba zespolenia wykonano techniką robotową, przeprowadził po raz pierwszy w dniu 28
sierpnia 2013 roku zespół w składzie: dr Rafał Mulek, dr Krzysztof Jacyna oraz dr n. med. Marek
Zawadzki. W sumie, w roku 2013 przeprowadzono 46 procedur w technice robotowej, w tym 1 operację
pobrania nerki od żywego dawcy, 1 operację całkowitej resekcji żołądka, 1 operację dystalnej resekcji
żołądka sposobem Roux-en-Y, 1 operację dystalnej resekcji żołądka sposobem B1, 9 operacji bypass'u
żoładkowego, 4 operacje hemikolektomii prawostronnej, 6 operacji przedniej resekcji odbytnicy, 1
splenectomię, 2 adrenalektomie lewostronne, 1 adrenalektomię prawostronną, 3 plastyki wodonercza,
9 prostatectomii, 1 operację tumorectomii guza nerki z zaoszczędzeniem narządu, 2 operacje usunięcia
nerki lewej i 4 operacje usuięcia nerki prawej. W roku 2014, urolodzy z Wojewódzkiego Szpitala
Specjalistycznego we Wrocławiu przeprowadzili operację usunięcie nerki z całym moczowodem (
nefroureterektomia ) w przebiegu raka urotelialnego miedniczki nerkowej. Operację przeprowadził w
dniu 28 kwietnia dr Marek Fiutowski w asyście dr Adriana Czekaja. W sumie, w roku 2014
przeprowadzono 34 procedury chirurgiczne, w tym 2 dystalne resekcje żołądka, 3 operacje bypass'u
żołądkowego, 6 hemikolectomii prawostronnych, 4 przednie resekcje odbytnicy, 1 splenectomię, 1
adrenalektomię lewostronną, 15 prostatectomii oraz 1 nephrectomię lewostronną i 1 nephrectomię
prawostronną. W roku 2015 środki finansowe Wojewódzkiego Szpitala Specjalistycznego we
Wrocławiu, pozwoliły na wykonanie już tylko 25 procedur robotowych, w tym 3 operacji brzuszno-
krzyżowej amputacji odbytnicy, 7 przednich resekcji odbytnicy, 1 totalnej resekcji żołądka, 4 operacje
bypass'u żołądkowego, 5 mankietowych resekcji żołądka, 1 adrenalektomię prawostronną, 3
prostatektomie i 1 nefrektomię lewostronną. końcówki W roku 2016, szpital zorganizowal II
Międzynarodowy Kongres Polskiego Towarzystwa Chirurgii Robotowej połączony z I Polsko-Włoskim
Sympozjum Chirurgii Robotowej w Onkologii, które z inicjatywy profesora Wojciecha Witkiewicza, przy
zaangażowaniu członków Polskiego Towarzystwa Chirurgii Robotowej, odbyły się we Wrocławiu w
dniach 4-5 marca. Do udziału w wydarzeniu zostali zaproszeni uznani europejscy specjaliści chirurgii
robotowej z zakresu chirurgii ogólnej, onkologicznej, chirurgii piersi, kardiochirurgii, urologii, ginekologii,

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 8 z 39 -
laryngologii. Gośćmi specjalnymi Kongresu byli chirurdzy z Europejskiego Instytutu Onkologii w
Mediolanie, referencyjnego ośrodka chirurgii robotowej w Europie. Specjaliści z Mediolanu podzieli się
ze słuchaczami swoim cennym, niejednokrotnie pionierskim w skali światowej doświadczeniem.
Wspólne obrady przyczyniły się do nawiązania współpracy pomiędzy Wojewódzkim Szpitalem
Specjalistycznym we Wrocławiu a Europejskim Instytutem Onkologii w Mediolanie. Kongres po raz
kolejny udowodnił, że postęp i chirurgia robotowa nie znają granic i są w stanie wkroczyć praktycznie w
każdą dziedzinę zabiegową. W dniu 9 maja 2016 roku zespół onkologów w składzie dr n. med. Marek
Zawadzki, dr n. med. Marek Rząca, oraz dr Magdalena Sitarska, wykonał po raz pierwszy operację
międzyzwieraczowej amputacji odbytnicynw technice robotowej.
Podsumowując od grudnia 2010 roku do grudnia roku 2016 w Wojewódzkim Szpitalu Specjalistycznym
Ośrodku Badawczo Rozwojowym we Wrocławiu, prowadzonym przez Pana Profesora Wojciecha
Witkiewicza przy udziale całego zespołu, z powodzeniem przeprowadzono 275 operacji (e)
techniką robotową, dając solidny fundament dla dalszego rozwoju chirurgii robotowej w Polsce.
Opis procedury Chirurgia wspierana robotowo jest minimalnie inwazyjną operacją wykonywaną zdalnie z udziałem
skomputeryzowanej stacji roboczej, gdzie lekarz obserwuje pole operacyjne za pośrednictwem
dedykowanego systemu kamer. Chirurg manipuluje zrobotyzowanymi ramionami służącymi do
pozycjonowania i manipulowania endoskopem mogącym chwytać, ciąć, analizować, koagulować i szyć
tkanki przy użyciu zręcznych manipulatorów (joysticków) i przełączników nożnych. Robotowo wspierana
operacja jest projektowana jako alternatywa dla konwencjonalnych laparoskopowych zabiegów
chirurgicznych oraz pozwala rozszerzyć możliwości chirurgów i usunąć trudności związane z
konwencjonalnymi technikami laparoskopowymi [1].
Główne zalety robota chirurgicznego nad konwencjonalną laparoskopią to:
• Ulepszona wizualizacja: trójwymiarowa (3D) vs dwuwymiarowa (2D) reprezentacji pola
operacyjnego.
• Usprawniona kinematyka ruchu: efekt podparcia pojawia się, gdy sztywne konwencjonalne
przyrządy laparoskopowe przechodzą przez trokary, co prowadzi do odwrócenia ruchu od
strony chirurga w stosunku do ruchu końcówki roboczej przyrządu. Narzędzie robotyczne ma
siedem stopni swobody, podobnie do ludzkiego ramienia i ręki, a sztywne tradycyjne
instrumenty mają jedynie cztery stopnie swobody, co zmienia kinematykę ruchów w polu
operacyjnym.
• Stabilizacja instrumentów w obrębie pola operacyjnego: Niewielkie ruchy wykonywane przez
chirurga są wzmacniane (w tym błędy lub drżenie rąk) przy użyciu konwencjonalnych procedur
laparoskopowych.
• Poprawa ergonomii pracy chirurga: Chirurg może być usadowiony przy użyciu systemu tele-
operacyjnego przy konsoli ograniczającej ból, drętwienie i uczucie zmęczenia w rękach,

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 9 z 39 -
nadgarstkach i ramionach. To jest niewątpliwą zaletą dla operatora w porównaniu do
konwencjonalnych sposobów wykonywania zabiegów laparoskopowych.
• Znacząco skrócona krzywa uczenia, co przy zmniejszającej się liczbie chirurgów w kraju
pozwala kształcić w krótszym czasie
Ograniczenia operacji wspieranych przez robota chirurgicznego jakie można spotkać w literaturze: [2]:
• Wymagane dodatkowe szkolenia dla tej techniki chirurgicznej;
• Zwiększone koszty i czas przygotowania sali operacyjnej;
• Zwiększona przestrzeń zajmowana przez urządzenie;
• Ograniczenia instrumentalne (np.: brak zrobotyzowanego ssaka i nawadniania, rozmiary
urządzenia);
• Brak odwzorowania czucia;
• Ryzyko awarii podczas zabiegu;
• Ograniczona liczba źródeł energii elektrycznej (na przykład mniej niż przy konwencjonalnej
laparoskopii);
• Ograniczenia chirurgiczne/operacyjnej (np.: nie przeznaczony do chirurgii obejmującej więcej
niż jedną ćwiartkę jamy brzusznej – w takim przypadku urządzenie musi być ponownie
zadokowane i przeniesione przy zmianie ćwiartki – ograniczone pole robocze).
DEFINICJA PROFILU DOWODU MEDYCZNEGO
W opracowaniu wykorzystano dwie metodologie dowodowe tj.
• system rankingowy oparty o poziomy dowodowe (levels of evidence), opisujące siłę dowodu
medycznego wynikającego z wyników badań klinicznych bądź z prac badawczych, zgodnie z
definicją przedstawioną przez National Cancer Institute [2]
• oraz o system GRADE W odniesieniu do systemu rankingowego wykorzystano system przedstawiony przez Oxford Centre for Evidence-based Medicine – Levels of Evidence (March 2009) [3]. Podsumowując, system ten
wskazuje na nastepujące poziomy dowodowe:
• 1a: Systematyczne prace przeglądowe (ujednolicone) w oparciu o randomizowane badania
kliniczne
• 1b: Indywidualne randomizowane badania (z wąskim przedziałem ufności)
• 1c: Wszystko bądź nic – randomizowane badania
• 2a: Systematyczne prace przeglądowe (ujednolicone) badań kohortowych
• 2b: Indywidualne badania kohortowe bądź badania randomizowane o niskiej jakości
• 2c: “wyniki – rezultaty” badań
• 3a: Prace przeglądowe (ujednolicone) w oparciu o przypadki medyczne
• 3b: Indywidualne przypadki medyczne
• 4: Przypadki medyczne (niskiej jakości badania kohortowe oraz przypadki medyczne)
• 5: opinie ekspertów bez wyraźnych, jednoznacznych krytycznych analiz, bądź oparte na
badaniach fizjologicznych

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 10 z 39 -
W związku z tym iż dane dotyczące przewagi nowych technologii, tak jak w przypadku chirurgii
małoinwazyjnej, często są oparte na poszlakowych dowodach klinicznych, o niskiej jakości (opisy
pojedynczych przypadków oraz badania niekontrolowane), występuje poważny problem z
wyciągnięciem jednoznacznych wniosków, na ich podstawie. Mimo to możliwe jest określenie
niepewności tego typu badań. Zgodnie z klasycznym podejściem w rozwoju technologii oraz jej
ewaluacji od możliwości technicznych poprzez efektywność kosztową, został stworzony schemat profilu
niepewności pod kątem oceny słuszności rekomendacji stosowania klinicznego, gdzie uwzględnia się
zarówno poziom dowodu medycznego jak i znaczenie rekomendacji (system GRADE). Jakość i poziom
dowodu jest klasyfikowany i stopniowany zgodnie z tym, czy dalsze badania mogą w jakiś znaczący
sposób zmienić aktualny poziom ufności w estymacji efektu. W oparciu o to dane z analiz literaturowych
klasyfikowane zostały w podziale, przedstawionym w tabeli 1, w oparciu o wskazania zawarte w [4], [5],
[6]:

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 11 z 39 -
Tabela 1 Proces ewaluacji technologii wspomagania robotowego w małoinwazyjnej chirurgii - kategoryzacja wyników opublikowanych Poziom niepewności Opis
wyniki ugruntowane (pewne), - mało prawdopodobne, że ulegną zmianie w wyniku przeprowadzenia nowych badań
Wyniki uzyskane z dobrze poprowadzonych badań porównawczych, np. systematyczne przeglądy literatury w oparciu o badania randomizowane, kontrolowane, bądź częściowo randomizowane, bądź kontrolowane nierandomizowane z odpowiednim uzasadnieniem czynników, z dużymi próbami, oraz statystycznie istotnymi wynikami. Przykład: wyniki operacji dotyczące kosztów.
wiarygodne - zgodne ze sobą wyniki pochodzące z różnych badań, wystarczająco licznych, badania obserwacyjne wysokiej jakości, powiązane w wynikach dla których analizy porównawcze (rozumiane z definicji) nie są wymagane
a) wyniki zbieżne otrzymane z wysokojakościowych, badań obserwacyjnych (np. badania prospektywne, porównawcze, z odpowiednim odniesieniem do czynników zakłócających), wykazując znaczące rezultaty, których estymacja raczej nie ulegnie zmianie w dalszych badaniach randomizowanych. b) zbieżne wyniki odnoszące się do efektów klinicznych, które nie wymagają ewaluacji poprzez badania porównawcze, gdyż ocena opiera się porównaniu do wartości bezwzględnych bądź zakresów, a nowa technologia nie wnosi niczego dodatkowego do istniejących rozwiązań Przykład: wiarygodne wyniki operacji robotem da Vinci dotyczące czasu operacji, utrzymującego się poniżej czasu maksymalnego dla zabiegu oraz dane dotyczące ubytku krwi również poniżej wartości maksymalnych.
niepewne, wyniki które bardzo
prawdopodobne, że mogą ulec zmianie w wyniku nowych randomizowanych badań
Wyniki z badań niekontrolowanych, które potrzebują potwierdzenia w badaniach porównawczych ponieważ ich ewaluacja zależy od różnicy pomiędzy wartością estymowaną a zabieg wykonywany nową technologią jest wykonany inaczej niż alternatywa. Przykładami są dane dotyczące marginesu chirurgicznego, wtórne rezultaty kliniczne (potencja, czas odżywienia w operacjach układu pokarmowego)
nieznane - wyniki na temat których nie ma żadnych doniesień, a które mogłyby mieć duże znaczenie dla ewaluacji przewagi nowej technologii
Nieudokumentowane i nieistniejące wyniki dotyczące wszystkich efektów operacji istotne z punktu widzenia ewaluacji technologii. Przykłady: czas bez choroby, przeżycie, śmiertelność, efekty biochemiczne.
ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 12 z 39 -
PRZEGLĄD LITERATURY NAUKOWEJ
Chirurgia ginekologiczna
Wright et al. (2013) starał się analizować operacje histerektomii wspomagane robotowo, pod kątem
powikłań szpitalnych, określając wypływ wykorzystania robotów chirurgicznych na liczbę powikłań w
porównaniu do histerektomii brzusznej oraz laparoskopowej. Badania przeprowadzono wśród 264,758
kobiet, które przeszły histerektomię z uwagi na zaburzenia ginekologiczne w 441 szpitalach w Stanach
Zjednoczonych w latach 2007-2010. Podejście proceduralne oraz czynniki związane z wykorzystaniem
robota do operacji histerektomii brały pod uwagę takie parametry jak: liczba powikłań, liczba transfuzji,
reoperacji, długość pobytu w szpitalu, śmiertelność i koszty, dla kobiet, które przeszły histerektomię z
wykorzystaniem robota w porównaniu z procedurą klasycznej laparoskopii oraz otwartej histerektomii.
Wyniki wykazały, że ilość zabiegów z zastosowaniem techniki robotowej w operacjach histerektomii
wzrosła z 0,5% w 2007 roku do 9,5%, w roku 2010. W tym samym okresie czasu, laparoskopowe
procedury histerektomii zwiększyły również swój procentowy udział z 24,3% do 30,5%. Trzy lata po
pierwszym zabiegu z wykorzystaniem robotów chirurgicznych w szpitalach, w których wykonywano takie
zabiegi ich udział stanowił 22,4% wszystkich histerektomii. Ilość otwartych zabiegów histerektomii
zmniejszyła się w zarówno w ośrodkach posiadających robota chirurgicznego jak i w tych, które go nie
posiadały. W analizie statystycznego wpływu netto (PSM - ang. propensity score matching), ogólna
liczba powikłań była podobna dla zabiegów wspomaganych robotowo jak i klasycznej laparoskopowej
histerektomii (5,5% vs 5,3%; ryzyko względne [RR], 1,03; 95% CI, 0.86-1.24). Jednak pacjenci, którzy
przeszli histerektomię ze wspomaganiem robotowym rzadziej przebywają w szpitalu dłużej niż 2 dni
(19,6% vs 24,9%; RR 0,78, 95% CI, 0.67-0.92), spadła liczba koniecznych przetoczeń krwi (1,4% vs
1,8% ; RR 0,80; 95% CI, 0.55-1.16). Procent pacjentów wymagających przedłużonej opieki medycznej
(0,2% vs 0,3%; RR 0,79; 95% CI, 0.35-1.76) był podobny. Łączne koszty związane z operacjami
histerektomii wspomaganej robotowo wynosiły o $ 2189 (95% CI, od 2030- $ 2349 $) więcej niż
klasycznej laparoskopowej. Autorzy doszli do wniosku, że między 2007 a 2010 rokiem, znacznie
zwiększyła się liczba zabiegów histerektomii z użyciem robota. Histerektomie z i bez użycia robota miały
podobne profile zachorowalności, ale korzystanie z robotów powodowało znacznie większe koszty [7].
Meta-analiza przeprowadzona przez Reza et al. (2010) pokazuje porównanie bezpieczeństwa i
skuteczności zabiegów z użyciem robota, klasycznej laparoskopii oraz otwartej chirurgii
konwencjonalnej w obszarze ginekologii. Szesnaście retrospektywnych i prospektywnych badań
obserwacyjnych dostarczyło dane ilościowe, które mogły być wykorzystane w meta-analizie. Analizie
poddano zabiegi chirurgiczne histerektomii u chorych na raka endometrium, histerektomii u chorych na
raka szyjki macicy, sakrokolpopeksjii u chorych z wypadaniem narządu rodnego, miomektomii, operacji
ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 13 z 39 -
odtworzenia ciągłości jajowodu i usunięcie przydatków. Poniższe wyniki zostały zidentyfikowane dla
zabiegu histerektomii raka endometrium w porównaniu operacji laparoskopowych z konwencjonalnymi
metodami: było znacznie mniej powikłań dla operacji robotowych, w porównaniu do operacji technikami
chirurgii otwartej, ale nie zaobserwowano różnicy między operacjami z użyciem robota a klasyczną
laparoskopią.
Wykorzystanie robota przy zabiegu histerektomii u chorych na raka endometrium spowodowało
skrócenie czasu pobytu w szpitalu w porównaniu zarówno z zabiegiem laparoskopowym jak i z
procedurą otwartą. Czas trwania operacji był dłuższy w przypadku użycia robota w porównaniu z
zabiegami otwartymi, ale nie uległ zmianie w stosunku do klasycznego zabiegu laparoskopowego.
Procedura operacyjna wspomagana robotowo wiązała się z większym ryzykiem konwersji zabiegu w
stosunku do zabiegów otwartych, ale redukowała ryzyko konwersji w stosunku do zabiegów
wykonywanych klasyczną laparoskopią. Zwiększeniu uległa liczba usuniętych węzłów chłonnych
podczas zabiegów z wykorzystaniem robota w stosunku do zabiegów otwartych ale nie odnotowano
takiego wzrostu dla zabiegów laparoskopowych i nie odnotowano zwiększenia liczby usuniętych węzłów
chłonnych miednicy lub aorty w porównaniu z innymi technikami. Podobne wnioski zostały
zidentyfikowane dla histerektomii u chorych na raka szyjki macicy. Nie stwierdzono istotnych
statystycznie różnic w czasie trwania operacji dla operacji otwartych i procedur laparoskopowych, w
porównaniu z operacjami robotowymi. [8]
Częstotliwość powikłań, konieczność wykonania konwersji i liczba usuniętych węzłów chłonnych nie
różniły się istotnie między trzema porównywanymi technikami. Analiza odtworzenia ciągłości jajowodu
pokazuje znacznie dłuższy czas trwania operacji z wykorzystaniem robota w porównaniu z zabiegami
otwartymi. Nie stwierdzono istotnych różnic dla czasu hospitalizacji, liczby powikłań, utraty krwi,
częstości wystąpienia ciąży pozamacicznej czy liczby poronień. Nie zostały również zwiększone koszty
wykonania operacji z użyciem robota w odniesieniu do operacji laparoskopowych czy też otwartych.
Procedury miomektomii wykazywały znacznie mniejszą utratę krwi i zwiększenie kosztów operacji dla
operacji wykorzystujących robota chirurgicznego, w porównaniu z operacjami laparoskopowymi, jednak
bez znaczącej różnicy w czasie trwania zabiegu. W badaniu chorób łagodnych odnotowano znacznie
dłuższy czas zabiegu, krótszy czas pobytu w szpitalu i mniejszą utratę krwi w przypadku operacji
robotowych w porównaniu do operacji laparoskopowych. Procedury Sacrocolopeksji miały dłuższe
czasy operacji, krótsze pobyty w szpitalu i mniejszą utratę krwi, ale większe ryzyko pooperacyjnej
gorączki przy zastosowaniu wspomagania robotowego w stosunku do chirurgii otwartej. Procedury
usunięcia przydatków miały dłuższe czasy operacji przy użyciu robota w porównaniu do zabiegów
laparoskopowych. Autorzy doszli do wniosku, że robot chirurgiczny oferuje ograniczone zalety w
stosunku do klasycznych technik chirurgicznych. Jednak ze względu na ograniczenia w dowodach
wyniki badania były również ograniczone, więc otrzymane wnioski powinny być traktowane z
ostrożnością.

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 14 z 39 -
Nie ma wystarczających dowodów klinicznych z dużych, dobrze zaprojektowanych, statystycznie
istotnych lub statystycznie porównawczych badań, dla operacji wspieranych przez robota
chirurgicznego w porównaniu z konwencjonalnymi metodami chirurgicznymi. Wady dostępnych badań
dotyczą:
- niewielkiej liczebność próby,
- braku długoterminowej obserwacji,
- braku randomizacji,
- braku bezpośredniego porównania procedur wspomaganych robotowo z konwencjonalnymi
procedurami.
Ponadto porównanie wyników różnych badań było trudne ze względu na:
- różnice w procedurach chirurgicznych,
- różnice w rodzaju zrobotyzowanych systemów wykorzystywanych w badaniach,
- różnice w technikach operacyjnych, różnice w charakterystyce pacjentów,
- a także różnice w raportowania wyników.
Wnioski z tej pracy wskazują iż jest zapotrzebowanie na dobrze zaprojektowane i długoterminowe
badania w celu ustalenia czy procedury robotowo wspomaganej chirurgii są bezpieczniejsze, bardziej
skuteczne i dają większe korzyści niż tradycyjne procedury operacyjne w danych uwarunkowaniach
operacyjnych.
W badaniu (2016) [9], określano wykonalność operacji wspomaganej robotowo w porównaniu do
operacji laparoskopowych oraz laparotomii, w kontekście wyników chirurgicznych, w operacjach
związanych z rakiem jajników. 138 kobiet, mających rak jajnika IA-IIIC, wzięło udział w badaniu. Każdy
z pacjentów był analizowany pod kątem demografii, parametrów przedoperacyjnych, komplikacji oraz
przeżywalności. Z badań tych wynika iż operacje robotowe oraz laparoskopowe charakteryzowały się
zredukowanym czasem operacji oraz mniejszą utratą krwi. Operacje robotowe charakteryzowały się
najniższym poziomem bólu pooperacyjnego, skróconym pobytem w szpitalu, oraz powrotem do
normalnego żywienia. Przeżywalność jak i poziom komplikacji były porównywalne. We wnioskach
wskazano iż operacje robotowe stanowią doskonałą alternatywę w zabiegach usunięcia raka jajnika w
połączeniu z właściwym doborem pacjentów. W pracy przeglądowej również z roku 2016 [10]
dotyczącej udziału operacji robotowych w ginekologicznej chirurgii onkologicznej, wskazano na
wykładniczo rosnącą grupę operacji robotowych w ostatnich 10 latach, głównie zamieniającą operacje
laparoskopowe. Wskazano na skróconą krzywą uczenia oraz spadek śmiertelności jako główne
czynniki. Większe koszty to zasadniczy element ograniczający stosowalność tej techniki, jednak ostatnie publikacje przeglądowe również wskazują iż często w porównaniach laparoskopii i chirurgii robotowej porównuje się operacje przeprowadzone przez bardzo doświadczonych w laparoskopii lekarzy z lekarzami o bardzo słabym doświadczeniu w chirurgii robotowej, co zakłamuje wyniki. Naturalnie, mogą się zdarzyć przypadku odwrotne jednak ze względu na
zdecydowanie większą liczbę lekarzy z doświadczeniem w laparoskopii niż w chirurgii robotowej, są
one znacznie mniej prawdopodobne. Nadal w roku 2016 większość prac kończy się stwierdzeniem o
braku randomizowanych badań prospektywnych.

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 15 z 39 -
Kolejna analiza zasadności stosowania techniki robotowej z 2016 roku, [11] bierze pod uwagę badania
randomizowane, porównujące laparoskopię z techniką robotową w zabiegach sakrokolopeksji.
Obniżenie lub wypadanie ścian pochwy i macicy jest jednym z najbardziej dolegliwych schorzeń
współczesnych kobiet. Przebyte porody drogami natury, szczególnie dużych dzieci, trudne i ciężkie
porody, osłabienie elastyczności tkanki łącznej i ubytek kolagenu związany z menopauzą, powiększenie
macicy np. przez mięśniaki, praca fizyczna z nasileniem tłoczni brzusznej są powodem występowania
zaburzeń́ statyki narządów płciowych. Zidentyfikowano dwa badania randomizowane (n = 78) Paraiso
2011 pokazał iż zabieg laparoskopowy jest szybszy niż robotowy (199 +/- 46 vs. 265 +/- 50 min; p <
.001), jednak w badaniu ACCESS takiej różnicy nie wykazano (parametr jest więc niewiarygodny w
naszej analizie) (225 +/- 62.3 vs. 246.5 +/- 51.3 min; p = .110). W obu badaniach koszt operacji był
wyższy w części robotowej, jednak w badaniu ACCESS tylko wtedy kiedy uwzględniono koszt zakupu i
serwisu (LSC US$11,573 +/- 3191 vs. RASC US$19,616 +/- 3135; p < .001). W badaniu Paraiso
operacje robotowe były droższe niezależnie od tego czy koszt zakupu i serwisu uwzględniano (LSC
US$ 14,342 +/- 2941 vs. RASC 16,278 +/- 3326; p = 0.008). Ból był wyższy przy operacji robotowej
jednak wykazywano różne punkty czasowe. Nie wykazano różnic w efektach anatomicznych oraz
jakości życia. Jednak zwrócono uwagę na ważny aspekt obu badań. Doświadczenie lekarzy w operacjach robotowych było dziesięciokrotnie mniejsze niż w operacjach laparoskopowych, w obydwu badaniach. Dalsza analiza wykazała iż porównywanie operacji przy różnym doświadczeniu znacząco podraża koszty operacji robotowych, które mogą być zredukowane poprzez nabywanie doświadczenia. W tym przypadku krzywa uczenia jest znacznie krótsza dla techniki robotowej. Niedoszacowany jest aktualnie również poziom wpływu ergonomii na efekty chirurgiczne oraz kliniczne. [12] Badania prospektywne porównawcze u pacjentów z rakiem endometrium przeprowadzone w
szpitalu uniwersyteckim na 142 osobach, wykazały iż pacjenci po operacjach robotowych mieli znacznie
niższy stopień spożycia opioidów oraz wykazali szybszy powrót do zdrowia w porównaniu do pacjentów
operowanych techniką laparotomii.
Bardzo ciekawe dane zostały opublikowane w roku 2016 przez [13]. W szpitalach w Kopenhadze,
przeprowadzono szczegółową analizę kosztów operacji robotowych dla histerektomii w porównaniu do
całkowitej brzusznej histerektomii, u kobiet z rakiem endometrium lub hiperplazją/rozrostem
endometrium z atypią. W Copenhagen University Hospital, Herlev (Dania), porównano dwie kohorty:
kobiety operowane robotowo (n=202) bądź techniką całkowitej brzusznej histerektomia (n=158). W wyniku szczegółowej analizy kosztów wykazano iż koszt całkowity leczenia był znaczenie niższy w przypadku operacji robotowych, w związku z mniejszą liczbą komplikacji oraz znacznie krótszym pobytem w szpitalu.

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 16 z 39 -
Chirurgia ogólna
Operacje bariatryczne Systematyczny przegląd chirurgii bariatrycznej wspomaganej robotowo został przeprowadzony przez
Cirocchi et al (2013). Zawarto dwadzieścia dwa badania porównawcze, niezależnie od ich wielkości,
statusu publikacji i języka, które obejmowały pacjentów poddanych operacji bariatrycznej wspomaganej
robotowo. Badania porównawcze były uwzględnione, jeżeli koncentrowały się na wybranych
rezultatach, niezależnie od rodzaju podejścia chirurgicznego stosowanego dla grupy porównawczej
(laparoskopowe lub otwarte). Podstawowe parametry jakie brano pod uwagę to: powikłania chirurgiczne
takie jak: (konwersja do operacji otwartej, przecieki zespoleń, ponowna interwencja z powodu powikłań,
śmiertelność), efekty bariatryczne: (pooperacyjne Body Mass Index), i efekty metaboliczne (remisja
cukrzycy typu 2). Odsetek nieszczelności zespolenia wynosił 8,51% w wyłączeniu żółciowo-
trzustkowym. 30-dniowy odsetek reoperacji wynosił 1,14% dla bypassu żołądka oraz 1,16% dla
mankietowej resekcji żołądka. Większy odsetek powikłań wystąpił w przypadku bypassu żołądka niż w
mankietowej resekcji żołądka (4,26% vs. 1,2%). Średni czas pobytu w szpitalu był dłuższy po bypassie
żołądka (zakres 2.6-7.4 dni). Głównym ograniczeniem tej analizy była niewielka liczba operacji,
niewielkie grupy pacjentów, niejednorodność pacjentów włączonych do badania oraz brak danych o
metabolicznych i bariatrycznych wynikach operacji. Założenie, że robotowa operacja jest lepszą metodą
przy bardziej złożonych przypadkach, nie znajduje uzasadnienia w dostępnych materiałach. Główną
siłą zrobotyzowanych operacji są ułatwienia, niektórych etapów zabiegu (zespolenie żołądkowo-jelitowe
i zespolenie jelitowo-jelitowe w bypassie żołądka lub obszycie linii zszywek w mankietowej resekcji
żołądka). Główną wadą zrobotyzowanej chirurgii bariatrycznej wciąż pozostają wysokie koszty
operacyjne i i wysokie koszty zakupu urządzenia" [1]
Bailey et al (2013) przeprowadzili systematyczny przegląd operacji wspomaganych robotowo w
porównaniu do Roux-en-Y bypassu żołądka (RYGB) w technice laparoskopowej u otyłych osób
dorosłych w wieku 18 do 65 lat. Badania porównywałytechnikę robotową z klasyczną operacją
laparoskopową RYGB z udziałem pacjentów w wieku 18-65 lat, którzy spełnili kryteria National Institute
of Health (NIH) dla chirurgii bariatrycznej. Wyniki zostały zestawione przy użyciu losowych efektów
meta-analizy danych. Analiza ekonomiczna - metoda drzewa decyzyjnego została przeprowadzona w
celu obliczenia przewidywanych kosztów związanych z każdą z technik. Systematyczne strategia
przeszukiwania baz danych doprowadziła do określenia 1,374 potencjalnie znaczących badań. Kryteria
włączenia spełniło 10 z tych badań, które obejmowały wyniki 2557 pacjentów. Ilość znaczących oraz
nieznacznych powikłań nie różniła się istotnie między grupami pacjentów operowanych w asyście robota
i konwencjonalną techniką laparoskopową. Odsetek nieszczelności i zwężeń zespoleń, krwawień
okołooperayjnych i reoperacji nie różniły się na poziomie istotności statystycznej. Analiza ekonomiczna
wykazała, że przewidywane koszty dla RYGB w asyście robota ($ 15.447) były wyższe niż w przypadku

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 17 z 39 -
RYGB przy wykorzystaniu laparoskopii ($ 11.956). Analizy istotności statystycznej przyniosły podobne
wyniki. Autorzy doszli do wniosku, że liczba powikłań nie różniła się istotnie pomiędzy operacją
wspomaganą robotowo i klasyczną laparoskopią w operacjach RYGB. Przewidywane koszty były
jednak większe dla operacji robotowych RYGB. Zaleca się dalsze analizy kosztów efektywności przed
przyjęciem zrobotyzowanego podejścia zabiegu RYGB.[2]
Dane zaktualizowane z roku 2016 dotyczące doświadczeń w zakresie zastosowania techniki robotowej
w chirurgii bariatrycznej [3-5], wskazują iż jest to podejście bezpieczne i może być stosowane, jednak
w każdym przypadku czas operacji techniką robotową był dłuższy niż w przypadku zabiegów
laparoskopowych. Autorzy wszystkich, aktualnych publikacji podkreślają iż w znacznej mierze jest to
efekt braku doświadczenia. Parametr ten może być krótszy w miarę uczenia się oraz upowszechnienia
techniki robotowej. Wydłużony czas operacji jest też głównym powodem większego kosztu.
Fundoplikacja Mi et al. (2010) przeprowadzili systematyczny przegląd prac, aby ocenić efekty zabiegu fundoplikacji w
technice robotowej (RALF) do leczenia choroby refluksowej przełyku (GERD). Dwóch recenzentów
niezależnie wyszukiwało i zidentyfikowano siedem randomizowanych prób kontrolnych (RCT) oraz
cztery kliniczne kontrolowane badania (CCT) dla operacji przeprowadzanych z robotem chirurgicznym
(RALF) w porównaniu z konwencjonalną techniką laparoskopową fundoplikacji (CLF) dla GERD.
Głównymi parametrami porównywanymi w badaniu były czas operacji, częstość wystąpienia powikłań,
czas hospitalizacji i koszty. Spośród 533 pacjentów, 198 przeszło zabieg przy użyciu RALF oraz 335
przeszło zabieg przy użyciu CLF. Wyniki wykazały, że pooperacyjna ilość powikłań jest mniejsza dla
RALF, ale całkowity czas pracy jest dłuższy w odniesieniu do CLF. Statystycznie, nie było znaczących
różnic między dwiema grupami w odniesieniu do okołooperacyjnych powikłań i czasu pobytu w szpitalu.
Autorzy stwierdzili, że o ile jest to możliwe RALF jest bezpieczną alternatywę dla chirurgicznego leczenia
GERD, ale brakuje oczywistych korzyści pod względem czasu pracy, czasu pobytu w szpitalu i kosztów.
[6]
Cholecystektomia Wnioski: Wyniki cholecystektomii robotowej są porównywalne do wyników cholecystektomii
laparoskopowej (LE3B)
Cholecytektomia robotowa (ChR) jest często pierwszą procedurą wykonywaną przez chirurgów
zaczynających operacje z wykorzystaniem robota chirurgicznego. Dane z piśmiennictwa wskazują, że
korzyści wynikające z zastosowania robota podczas cholecystektomii są niewielkie, natomiast operacja
robota jest droższa niż operacja laparoskopowa. W piśmiennictwie dominują artykuły o charakterze
badań retrospektywnych bez grupy kontrolnej, które udowodniły, że ChR jest operacją bezpieczną lecz
droższą niż operacje laparoskopowe [14-17]. Breitenstain i wsp. opublikowali badanie porównujące
ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 18 z 39 -
(case-matched study) wyniki okołooperacyjne 50 pacjentów operowanych robotowo i 50 pacjentów
operowanych laparoskopowo. W zakresie: czasu operacji, konwersji do operacji otwartej, powikłań i
długości pobytu w szpitalu nie stwierdzono istotnych różnic pomiędzy ChR a cholecystektomią
laparoskopową. Po uwzględnieniu kosztów amortyzacji oraz kosztów sprzętu jednorazowego ChR była
operacją droższą niż operacja laparoskopowa [18].
W 2012 opublikowano przegląd piśmiennictwa przygotowany przez Cochrane porównujący ChR z
cholecystektomią laparoskopową. Uwzględniono 4 badania naukowe zawierające łącznie 431
pacjentów (ChR 212 i cholecystektomia laparoskopowa 219). Nie stwierdzono istotnych statystycznie
różnic pomiędzy 2 typami analizowanych operacji [19].
Resekcje ogona trzustki Wnioski: Resekcji ogona trzustki mogą z powodzeniem być wykonywane z zastosowaniem robota.
(LE3). Zastosowanie robota pozwala zmniejszyć odsetek konwersji. (LE3B)
Operacje obwodowej resekcji trzustki w odróżnieniu do operacji głowy trzustki nie wymagają
wytworzenia zespolenia, przez co są częściej wykonywane są sposobem małoinwazyjnym niż operacje
głowy trzustki.
Obwodowe resekcje trzustki są z powodzeniem wykonywane laparoskopowo. W sytuacji gdy
wykonywana jest modyfikacja operacji polegająca na zaoszczędzeniu śledziony laparoskopowo jest to
operacja bardzo trudna technicznie.
W piśmiennictwie można odnaleźć 3 badania porównujące wyniki robotowej obwodowej resekcji trzustki
(RDP) z resekcją wykonywaną sposobem klasycznym. Według Watersa i wsp. koszty RDP są podobne
do operacji laparoskopowej i klasycznej [20, 21]. Dodatkowo podczas operacji robotowej częściej niż w
operacjach laparoskopowych i klasycznych udało się wykonać operację z zaoszczędzeniem śledziony
(RDP 65%, 19% operacje laparoskopowe, 12% operacje klasyczne). Operacje robotowe były dłuższe
niż operacje laparoskopowe i klasyczne.
Kang i wsp. badacze z Korei potwierdzili trend wskazany wcześniej. Również w ich materiale podczas
operacji robotowych wykonano więcej operacji z zaoszczędzeniem śledziony niż podczas operacji
laparoskopowych (95% vs. 64%). Operacje RDP były jednak dłuższe i droższe niż operacje
laparoskopowe [22].
W 2013 Daoudai i wsp. wykazali podobny odsetek operacji z zaoszczędzeniem śledziony zarówno
podczas RDP jak i operacji laparoskopowej. W ich materiale RDP była jednak operacją krótszą niż
operacja laparoskopowa [23].
Resekcja żołądka z powodu nowotworu złośliwego Wnioski: Wyniki robotowej resekcji żołądka wykonywanej z powodu nowotworu złośliwego żołądka są
podobne do wyników resekcji laparoskopowej. Operacja robotowa jest związana z mniejszą utratą krwi
oraz krótszym pobytem w szpitalu niż operacja laparoskopowa. Operacja robotowa jest dłuższa i
droższa niż operacja laparoskopowa. (LE2A)
ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 19 z 39 -
Wyniki chirurgiczne i onkologiczne robotowych częściowych i całkowitych resekcji żołądka (RRG) są
porównywalne do operacji wykonywanych metodą klasyczną lub laparoskopową. Liczba powikłań po
operacjach robotowych i laparoskopowych jest podobna, RGG może być związana z mniejszą utratą
krwi i krótszym pobytem w szpitalu niż operacja laparoskopowa lub klasyczna [24, 25]. Koszt operacji
robotowej jest jednak wyższy niż procedury laparoskopowej lub otwartej. Zastosowanie robota ułatwia
wykonanie najtrudniejszych elementów operacji takich jak usunięcie węzłów chłonnych oraz
wytworzenie zespolenia jelitowego i przełykowo-jelitowego [25, 26].
Usunięcie śledziony / Splenectomia Wnioski: Wyniki splenectomii robotowej i częściowej splenectomii robotowej są prównywalne z
wynikami operacji laparoskopowych. (LE3B)
Splenectomie wykonywane z zastosowaniem robota są dłuższe niż operacje laparoskopowe.
Badania porównujące wyniki splenektomii robotowych i laparoskopowych w zakresie; utraty krwi,
konwersji do operacji otwartych, powikłań pooperacyjnych oraz długości pobytu w szpitalu nie wykazały
istotnych różnic pomiędzy oboma typami opracji [27, 28]. Operacje robotowe są dłuższe i droższe niż
operacje laparoskopowe. Zalety operacji robotowej są zauważalne podczas preparowania naczyń
szypyły śledziony w trakcie częściowej resekcji sledziony.

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 20 z 39 -
Adrenelectomia Wnioski: Wyniki adrenelectomii robotowej są porównywalne do adrenelectomii laparoskopowej. (LE3B)
Adrenelectomie robotowe i laparoskopowe są operacjami bezpiecznymi a ich wyniki są porównywalne
z wynikami operacji klasycznych. Operacje robotowe są dłuższe niż operacje laparoskopowe, wyniki
oby typów procedur są podobne, jednakże utrata krwi po operacjach robotowych jest nieznacznie
mniejsza. [29] W przeglądzie piśmiennictwa z 2014 roku obejmującego ponad 600 pacjentów
zaobserwowano ponownie zaobserwowano że operacje robotowej związane są zmniejszą utratą krwi
oraz krótszym pobytem w szpitalu niż operacje laparoskopowe, a liczba powikłań po obu typach operacji
jest porównywalna. W opinii niektórych autorów zastosowanie robota ułatwia wykonie operacji w
przypadku większych guzów prawego nadnercza.[30]
Resekcja odbytnicy Wnioski: Wyniki operacji odbytnicy wykonywanych robotowo są porównywalne do wyników operacji
laparoskopowych. Wstępnie wyniki sugerują, że operacje robotowe umożliwiają bardziej doszczętne
wycięcie nowotworu odbytnicy oraz niż operacje laparoskopowe i klasyczne. Dodatkowo wyniki
czynnościowe (zaburzenia mikcji i potencji) są lepsze po operacjach robotowych. (LE2A)
Zastosowanie robota w chirurgii raka odbytnicy jest szeroko dyskutowane ze względu na obserwowane
mniejsze ryzyko uzyskania dodatnich marginesów (nie radyklane wycięcie guza) w porównaniu do
operacji laparoskopowej. [31-33]
Dodatkowo w analizie dużej bazy danych z USA (128 tysięcy pacjentów) zaobserwowano, że robotowe
odbytnicy są częściej wykonywane u pacjentów z „trudną anatomią” tj. w u mężczyzn z nowotworem
odbytnicy [34].
W 2016 Kwak i wsp. opublikowali przegląd piśmiennictwa na temat robotowej resekcji odbytnicy
uwzględniający publikacje z lat 2002-2015 [35].
Bezpieczeństwo metody i bezpośrednie wyniki okołooperacyjne.
Wstępnie potwierdzono, że operacje odbytnicy z zastosowaniem robota są dłuższe niż operacje
laparoskopowe. Jednakże, analiza nowszych doniesień wskazała, że czas operacji robotowych jest
porównywalny lub krótszy od operacji laparoskopowych. Prawdopodobnie wcześniejsze publikacje
porównywały operacje wykonywane przez doświadczonych chirurgów laparoskopowych z operacjami
robotowym wykonywanymi przez chirurgów będących jeszcze w trakcie uczenia się chirurgii robotowej.
Tak więc, wraz z nabyciem doświadczenia wydłużenie czasu operacji nie jest ograniczeniem metody
robotowej.
Częstość konwersji do zabiegu otwartego i powikłań pooperacyjnych.
Odsetek konwersji do zabiegu otwartego jest niższy po operacjach robotowych niż po operacjach
laparoskopowych. Przekłada się to na mniejszą liczbę powikłań pooperacyjnych i lepsze wyniki

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 21 z 39 -
onkologiczne. Czas powrotu do pełnej aktywności życiowej i odsetek powikłań jest podobny po
operacjach robotowych i laparoskopowych.
Porównanie wyników histopatologicznych preparatu usuniętej odbytnicy takich jak: liczba usuniętych
węzłów chłonnych, doszczętność wycięcia (marginesy dystalny i radialny), oraz jakość wyciętego
preparatu (macroscopic completeness of TME). Wymienione parametry mają wpływ na wynik
onkologiczny przebiegu leczenia raka odbytnicy. W zakresie liczby usuniętych węzłów chłonnych i
doszczętności wycięcia nie obserwowano istotnych różnic pomiędzy operacjami robotowym i
laparoskopowymi. W 2 pracach opisano lepszą jakość preparatu pooperacyjnego odbytnicy
(completeness of TME) po operacjach robotowych co może przekładać się na korzystniejszy wynik
leczenia onkologicznego.
Wyniki odległe leczenia onkologicznego (long term survival). Autorzy cytowanego przeglądu
piśmiennictwa uwzględnili 3 badania; w dwóch z nich porównano przeżycia 5-letnie pacjentów z rakiem
odbytnicy operowanych robotowo i laparoskopowo nie znajdując istotnych różnic. W jednej z
cytowanych prac porównano wyniki odległe leczenia po operacjach robotowych i klasycznych. Przeżyci
5-letnie były porównywalne w obu grupach jednakże w grupie pacjentów z zastosowaniem robota
chirurgicznego opisano mniejszy odsetek wznów miejscowych (3,2% vs. 16,1 ; p=0.024).
Wyniki czynnościowe operacji odbytnicy. Zdając sobie sprawę, iż zaburzenia oddawania moczu i
zaburzenia potencji są częstymi powikłaniami operacji raka odbytnicy Kwak i wsp. poddali analizie
piśmiennictwo badające wyniki czynnościowe robotowej operacji odbytnicy. W dostępnych 3 badaniach
porównawczych wykazano, że zaburzenia potencji i zaburzenia oddawania moczu po operacjach
robotowych występują rzadziej/ lub ustępują szybciej niż po operacjach laparoskopowych. Autorzy
zwrócili jednak uwagę na fakt, że wyniki tych badań powinny być interpretowane ostrożnie ze względu
na małą liczebność badanych grup.
Chirurgia Pediatryczna W 2013 roku Cundy i in. opublikowali pracę przeglądową oceniającą obecny stan chirurgii
małoinwazyjnej (MIS) guzów litych u dzieci, wspomaganej robotowo. Podjęto próbę systematycznego
przeszukania wielu elektronicznych baz danych literaturowych, uzupełnioną o kilka istotnych źródeł
wtórnych. Sumarycznie, 23 publikacje spełniały kryteria kwalifikacyjne, a w przeglądzie przedstawiono
całościowo 40 przypadków. Wskazania do zabiegu były szeroko zróżnicowane, z wyszczególnioną
grupą ponad 20 różnych schorzeń. Jedna trzecia guzów została sklasyfikowana jako złośliwe.
Większość procedur dotyczyła guzów jamy brzusznej lub guzów położonych zaotrzewnowo u młodzieży
(w przedziale wiekowym 1-18 lat). Zbiorowe powikłania wystąpiły u 10% badanych a stopień konwersji
wynosił 12,5%. Onkologiczne zdarzenia niepożądane obejmowały dwa pojedyncze wydarzenia rozlania
nowotworu i choroby resztkowej (MRD – Minimal Residual Disease). Dowody ograniczają się jednak do
kilku opisów przypadków i małych serii badawczych. Autorzy doszli do wniosku, że dla przypadków
różnorodnych i wysoce selektywnych przedstawionych w tym przeglądzie, mało inwazyjna chirurgia
wspomagana robotowo wydaje się być bezpieczną i wykonalną. Tym samym korzyści z pomocy robota
wydają się dobrze opisane, ale pozostają niepotwierdzone wystarczającą ilością dowodów. Potrzebne
są badania lepszej jakości w celu ustalenia prawdziwego bezpieczeństwa i skuteczności.[36] [37]

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 22 z 39 -
Alqahtani i autorzy w roku 2010 ocenili bezpieczeństwo oraz możliwości wykonywania małoinwazyjnych
operacji robotowych robotem da Vinci w zakresie chirurgii dziecięcej w wybranych procedurach
chirurgicznych. Retrospektywny przegląd 144 procedur obejmował następujące przypadki: 39
fundoplikacji; 34 cholecystektomii; 25 zwężenie żołądka; 13 splenektomii; 4 tylne, strzałkowe
anorektoplastyki przy malformacjach odbytu i odbytnicy; 4 nefrektomie; 4 appendektomie; 4
sympatektomie; 3 wycięcia torbieli dróg żółciowych z hepaticojejunostomią 3 operacje przepuklin
pachwinowych; 2 wycięcia torbieli wątroby, 2 naprawy wrodzonej przepukliny przeponowej, 2 miotomie
Hellera i 2 wycięcia cysty; 1 duodenostomia, 1 adrenalektomia i 1 histerektomia. Pomyślnie, bez
konwersji, zakończono 134 procedury; 7 dodatkowych przypadków wymagało operacji otwartej a 3
zostały wykonane laparoskopowo. Wystąpiła jedna perforacja przełyku i dwa przypadki przejściowe
zaburzenia połykania po fundoplikacji. Średni wiek chorych wynosił 8.9 lat, a średni ciężar pacjenta 57
kg. Autorzy doszli do wniosku, że operacja wspomagana robotowo wydaje się być bezpieczna i możliwa do przeprowadzenia w przypadku wielu procedur chirurgicznych u dzieci. Określenie
długoterminowych korzyści wymaga dalszego rozwoju tego systemu oraz randomizowanych badań. [38]
Chirurgia urologiczna
Prostatektomia W roku 2012 Ramsey i in. opublikowali systematyczny przegląd literatury, określając względną
skuteczność kliniczną i efektywność kosztową w radykalnej prostatektomii robotowej w porównaniu do
radykalnej prostatektomii laparoskopowej, w leczeniu raka stercza. Uwzględniono dowody z
porównawczych badań z randomizacją (RCT) oraz bez randomizacji, dla mężczyzn z klinicznie
zlokalizowanym rakiem gruczołu krokowego (cT1 lub cT2); parametry końcowe obejmowały działania
niepożądane, związane z rakiem, parametry funkcjonalne i deskryptory opieki. Dwóch recenzentów
streściło dane i oceniło ryzyko stronniczości włączonych badań. W czasie wyszukiwania
zidentyfikowano 2722 potencjalnie odpowiednie tytuły i streszczenia, z czego wybrano 914 raportów do
pełno-tekstowej kwalifikowalności. Spośród nich, wybrano dane dotyczące 19064 pacjentów w
pojedynczym RCT i 57 badań porównawczych bez randomizacji, spośród których kilka uznano za
posiadające niski stopień niepewności. Na podstawie tej analizy stwierdzono, że robotowo wspomagana
prostatektomia miał niższą okołooperacyjną zachorowalność oraz zmniejszone ryzyko pozytywnego (dodatniego) marginesu chirurgicznego w porównaniu z prostatektomią laparoskopową. Cena
prostatektomii robotowej w każdym przypadku była wyższa ze względu na amortyzację środka trwałego
oraz cenę serwisu robota. Analiza przeprowadzona przez autorów wykazała, że te nadmiarowe koszty mogą być zmniejszone, jeżeli koszty kapitałowe wyposażenia zostaną zminimalizowane oraz zostanie utrzymana duża ilość przypadków wykonywanych przez każdy system robotowy, zakładając co najmniej 100-150 zabiegów rocznie.
Albadine i in. w 2012 roku przeprowadzili retrospektywne badanie z wyszczególnieniem różnic w
pozytywnym marginesie chirurgicznym w otwartych pozaotrzewnowych radykalnych prostatektomiach,

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 23 z 39 -
radykalnych prostatektomiach laparoskopowych, i radykalnej prostatektomii wspomaganej robotowo.
Omówiono 99 przypadków wśród których 6 (5%) zostało zinterpretowane jako posiadające ujemny
margines chirurgiczny. Dziewięćdziesiąt trzy przypadki zostały zatem włączone, co odpowiada: 37
pozaotrzewnowym radykalnym prostatektomiom, 19 laparoskopowym i 37 wspomaganym robotowo.
Określono zależność charakterystyki parametrów kliniczno-patologicznych i biochemicznych od
dodatnich marginesów chirurgicznych. Najbardziej powszechnie spotykanym obszarem dodatniego
marginesu chirurgicznego był apex/distal trzeci we wszystkich grupach (62% prostatektomii
pozaotrzewnowej, 79% prostatektomii laparoskopowej, 60% prostatektomii wspomaganej robotowo).
Całkowita długość liniowa obszarów dodatnich marginesów chirurgicznych była znacząco skorelowana
z przedoperacyjnym antygenem specyficznym dla prostaty jego gęstością, etapem (fazą ?) pT oraz
objętością guza (P ≤ 0,001). Nie stwierdzono istotnych różnic pomiędzy tymi 3 grupami w odniesieniu
do całkowitej długości liniowej, liczby ognisk, lateralizacji (laterality), lub lokalizacji pozytywnego
marginesu chirurgicznego. Stopień biochemicznego nawrotu (Biochemical Recurrence) (rozumianego
jako wzrost w stężeniu antygenu specyficznego dla PSA) był także porównywalny w 3 badanych
grupach. Z analiz jednowymiarowych, wystąpienie biochemicznego nawrotu? (wzrostu stężenia
antygenu) było istotnie skorelowane ze stężeniem antygenu specyficznego dla prostaty przed
zabiegiem, jego gęstością, skalą Gleasona, liczbą dodatnich marginesów chirurgicznych, a całkowitą
długością liniową dodatniego marginesu chirurgicznego (p ≤ .02). Tylko przedoperacyjna gęstość
swoistego antygenu sterczowego i liczba dodatnich chirurgicznych ognisk marginesów były istotne
statystycznie (P ≤ .03) jako niezależne predyktory nawrotu biochemicznego. Autorzy nie stwierdzili
istotnych różnic w dodatnich marginesach chirurgicznych lub biochemicznego nawrotu wśród 3
analizownych prostatektomii. Przedoperacyjna gęstość swoistego antygenu sterczowego i liczba ognisk
dodatnich marginesów chirurgicznych były jedynymi niezależnymi predyktorami nawrotu
biochemicznego. [39]
W związku ze wzrostem liczby operacji robotowych w ostatnich dwóch latach pojawiły się pierwsze
analizy dowodowe na szerokich grupach pacjentów, wykazujących przewagę chirurgii robotowej nad
laparoskopową w zakresie prostatektomii.
Na podstawie wnikliwej i dogłębnej analizy najnowszej literatury z lat 2014-2016, dotyczącej wykazania
korzyści z zastosowania wspomaganej robotowo chirurgii małoinwazyjnej można jednoznacznie
stwierdzi co następuje:
- wykazano zwiększone bezpieczeństwo zabiegów ze wsparciem robotowym w przypadku operacji w
zakresie ginekologii, urologii oraz jamy brzusznej, niż w przypadku zabiegów kardiologicznych oraz w
obrębie głowy i szyi [40]
- również w roku 2016 Allan, C. i Illic D. przedstawili pierwszą pracę przeglądową na bazie 93 artykułów
dotyczącą badań randomizowanych wykazujących przewagę RALP nad LRP w zabiegach
prostatektomii; meta-analiza wykazała, że po zabiegach RALP szybciej ustępuje impotencja niż po zabiegach LRP [41] - do strony kosztowej autorzy Basto i in. biorąc doświadczenia z lat 2010 - 2013 (5130 pacjentów) z
Australijskich szpitali wykazują możliwość redukcji kosztów robotowych oraz zrównania ich w stosunku

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 24 z 39 -
do operacji otwartych i laparoskopowych, jako efektu zmniejszonego pobytu w szpitalu oraz
zmniejszonej transfuzji; autorzy proponują zmianę modelu ekonomicznego przy wyliczaniu kosztów dla
operacji wykonywanych robotowo [42];
- podobne wnioski otrzymali Biliani i in. 2016, którzy wykazali [43] w statystycznie czułej analizie Monte-
Carlo (metoda, która jest czuła na różnice statystycznie istotne), iż RALP może generować
oszczędności w zakresie prawdopodobieństwa od 38-99% dla robotowych operacji prostatektomii.
Wyższe koszty robotowych elementów zużywalnych są redukowane poprzez krótszy pobyt w szpitalu,
niższy stopień komplikacji operacyjnych oraz szybszy powrót do pracy. Analiza dotyczyła lat 2011-2014.
- jak wykazali Chang, Y. F. (2016) [44] [45] znacząca redukcja w krzywej uczenia w przypadku operacji
robotowych daje znaczące oszczędności oraz przyspieszone efekty kształcenia nowych lekarzy ze
specjalizacją chirurgii.
Nadal jednak jednym z kluczowych, poruszanych aspektów, jak pokazuje [46] jest konieczność rozwoju technologii robotowych (takich jak da Vinci) oraz nowoczesnych technik laparoskopowych w celu dalszej redukcji kosztów. - analiza przedstawiona przez [47] Riikonena dotycząca implementacji chirurgii robotowej w Finlandii,
jasno sugeruje konieczność centralizacji robotów oraz specjalizowania się ośrodków w danych
obszarach chirurgii; jest to zbieżne z danymi holenderskimi.
Krzywa Uczenia
Jednym z najważniejszych konsekwencji wprowadzenia do praktyki chirurgicznej operacji
wspomaganych robotowo jest znacząca reedukacja krzywej uczenia. Z perspektywy rosnącego
średniego wieku chirurga, ma to ogromne znaczenie. Aktualne dane literaturowe, z roku 2016 wskazują
na kilka, analiz globalnych porównujących czasy pomiędzy operacjami robotowymi a laparoskopowymi.
[48] Chirurgia odbytnicy, wspomagana robotowo, stanowi podejście pozwalające objeść wybrane
ograniczenia związane z utrudnionym dostępem do miejsca ulokowania nowotworu, dając lepsze wyniki
kliniczne przy krótszej krzywej uczenia. Analiza zaproponowana przez Jimenez-Rodriguez et. all,
stanowi systematyczny przegląd literaturowy zgodny z system PRISMA (Preferred Reporting Items for
Systematic Reviews and Meta-Analyses). Dane dotyczą podsumowania ostatnich 10 lat badań i zostały
operacowane w roku 2015. Uwzględniają zarówno dane eksperymentalne jak i badania kliniczne
dotyczące operacji odbytnicy. Wskazano na 34 publikacje z czego 9 dotyczyło bezpośrednio krzywej
uczenia z zastosowaniem wspomagania robotowego, 7 stanowiło przypadki kliniczne. Średnia liczba
przypadków w fazie I krzywej uczenia wynosiła 29,7 pacjentów. Na fazę II przypadało 37,4 pacjentów.
Średnia liczba przypadków, jakie trzeba wykonać aby uznać chirurga za biegłego w technice robotowej
wynosiła 39 pacjentów, wskazując jednoznacznie na krótszy czas uczenia w przypadku operacji
robotowych.
Autorzy Goonerwardene et all. w roku 2016 wskazują na skrócenie krzywej uczenia w trakcie szkolenia
odbywającego się z udziałem drugiej konsoli robotowej. W takiej geometrii zarówno uczący się jak i
szkolący widzą wyraźnie pole operacyjne w trójwymiarowym obrazowaniu. Takie rozwiązanie znacząco

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 25 z 39 -
wpływa na zrozumienie w procesie uczenia oraz na poznanie technik operacyjnych. Uczący się może
być naprowadzany przez szkolącego chirurga poprzez przerywaną wymianę komend, wskaźnik 3-D,
trzecie ramię oraz możliwość justowania kamery. Ten moduł uczenia jest na tyle unikalny iż nie jest
możliwe osiągnięcie podobnych wyników ani w trybie jednej konsoli ani przy operacji otwartej. Z danych
dotyczących uczenia dla prostatektomii, operacje wykonywane z wykorzystaniem drugiej konsoli, miały
lepsze rezultaty śródoperacyjne jak i okołooperacyjne Lay A, Morgan MSC, Shakir NA, Garcia-Gill M,
Gahan JC, Friedlander JI et al (2014) Single versus dual-console robotassisted radical prostatectomy:
impact on intraoperative and postoperative outcomes in a teaching institution. J Endourol 28:A226.
Układ podwójnej konsoli jest znacznie bezpieczniejszy w procesie uczenia niż układ jednej konsoli.
Autorzy Foo oraz Law, wskazują na niewielkie ilości danych dotyczących krzywych uczenia dla nowych
chirurgów którzy, nie posiadają doświadczenia ani w chirurgii laparoskopowej ani otwartej. W swojej
pracy [49], pt. "The Learning Curve of Robotic-Assisted Low Rectal Resection of a Novice Rectal
Surgeon." dokumentują krzywe uczenia dla chirurgów bez doświadczenia, na przykładzie operacji
odbytniczych w okresie od marca 2013 do października 2014 roku, dla całkowitego wycięcia
mezorektum. W wyniku badań wskazano iż krzywa uczenia wyniosła 25 przypadków, gdzie otrzymano
wyniki podobne do tych jakie uzyskują chirurdzy z doświadczeniem zarówno w laparoskopii jak i chiurgii
otwartej.
Na podstawie pracy zaprezentowanej przez A. Goldenberg D.O, M. Piltin O.M.S.IV, D. Flaherty. D.O.,
Ph.D., Roy Sandau, Robotic Assisted Laparoscopic Colorectal Surgery: Analysis of the Learning Curve
Time and Experience of One Surgeon D.O. Rowan University School of Osteopathic Medicine, Stratford,
NJ, krzywa uczenia oraz osiągnięcie plateau, zostało przedstawione na rysunku poniżej:
(a) (b) Rysunek 1. Zaadoptowane z pracy (A. Goldenberg D.O, M. Piltin O.M.S.IV, D. Flaherty. D.O., Ph.D., Roy Sandau). Wykresy przedstawiające krzywe uczenia dla operacji odbytnicy.

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 26 z 39 -
OKREŚLANIE POZIOMU AKCEPTOWALNOŚCI NIEPEWNOŚCI - SCHEMAT DLA WSS-OBR
Prostatektomia (2 raporty HTA, 8 systematycznych prac przeglądowych dla 47 badań klinicznych + 5 prac
badawczych/klinicznych)
Kolektomia (2 systematyczne prace przeglądowe 23 przypadki kliniczne + 6 serii klinicznych)
WYKONALNOŚĆ BEZPIECZEŃSTWO WYNIK CHIRURGICZNY
WTÓRNY WYNIK KLINICZNY
PIERWOTNY WYNIK KLINICZNY
↓ ↓ ↓ ↓ ↓
kosztypowikłania wewnątrz-operacyjne
pozytywny margines zanik impotencji zmiany w biochemii
konwersja do chirurgii otwartej
powikłania pooperacyjne
nawrót chemiczny nowotworu
czas operacji utrata krwi transfuzja przeżywalność
krzywa uczenia powtórna interwencja
WYKONALNOŚĆ BEZPIECZEŃSTWO WYNIK CHIRURGICZNY
WTÓRNY WYNIK KLINICZNY
PIERWOTNY WYNIK KLINICZNY
↓ ↓ ↓ ↓ ↓
koszty powikłania wewnątrz-operacyjne
pozytywny margines
powrót do odżywiania
czas bez nawrotu choroby
konwersja do chirurgii otwartej /laparoskopwej
powikłania po-operacyjne
adekwatność usunięcia węzłów
chłonnych
(praca jelit) uwalnianie gazów
jelitowych
nawrót chemiczny nowotworu
czas operacji utrata krwi / transfuzja
adekwatność dyssekcji
całkowita przeżywalność
krzywa uczenia powtórna interwencja
(praca jelit) powrót
perystaltyki
LEGENDAwyniki pewne wyniki wiarygone wyniki niepewne wyniki nieznane

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 27 z 39 -
Histerektomia (2 systematyczne prace przeglądowe 6 przypadków klinicznych + 3 serie kliniczne)
Gastrektomia (2 przypadki kliniczne na, kolejno, 7 oraz 9 pacjentach)
WYKONALNOŚĆ BEZPIECZEŃSTWO WYNIK CHIRURGICZNY
WTÓRNY WYNIK KLINICZNY
PIERWOTNY WYNIK KLINICZNY
↓ ↓ ↓ ↓ ↓
koszty powikłania wewnątrz-operacyjne pozytywny margines powrót do
odżywianiaczas bez nawrotu
choroby
konwersja do chirurgii otwartej
powikłania po-operacyjne
adekwatność usunięcia węzłów
chłonnychnietrzymanie moczu nawrót chemiczny
nowotworu
czas operacji utrata krwi / transfuzja
adekwatność dyssekcji
całkowita przeżywalność
krzywa uczenia powtórna interwencja
WYKONALNOŚĆ BEZPIECZEŃSTWO WYNIK CHIRURGICZNY
WTÓRNY WYNIK KLINICZNY
PIERWOTNY WYNIK KLINICZNY
↓ ↓ ↓ ↓ ↓
koszty powikłania wewnątrz-operacyjne pozytywny margines powrót do
odżywianiaczas bez nawrotu
choroby
konwersja do chirurgii otwartej /laparoskopwej
powikłania po-operacyjne
adekwatność usunięcia węzłów
chłonnychnietrzymanie moczu nawrót chemiczny
nowotworu
czas operacji utrata krwi / transfuzja
adekwatność dyssekcji
całkowita przeżywalność
krzywa uczenia powtórna interwencja

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 28 z 39 -
IDENTYFIKACJA WSKAZAŃ KLINICZNYCH O OBIECUJĄCYCH WYNIKACH/SKUTKACH
Na podstawie powyższej analizy dowodowej opartej o najbardziej aktualne dane dotyczące przewagi
operacji robotowych nad innymi technikami chirurgicznymi oraz doświadczenia zdobytego przez
chirurgów Wojewódzkiego Szpitala Specjalistycznego Ośrodka Badawczo-Rozwojowego we Wrocławiu
w ramach warunkowej refundacji uwzględniono by następujące operacje:
PROSTATEKTOMIA HISTEREKTOMIA OPERACJE JELITA GRUBEGO
ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 29 z 39 -
PLANY BADAWCZO – WDROŻENIOWE: LAPAROSKOPIA "360"
Rozwój technik operacji małoinwazyjnych, jest związany głównie ze zmniejszeniem kosztów samego
zabiegu i skróceniem czasu hospitalizacji bezpośrednio po operacji, a przede wszystkim ze
zmniejszeniem liczby powikłań pooperacyjnych. Pomimo znacznych postępów (m.in. w obrazowaniu),
wciąż istnieje silna potrzeba w rozwoju robotyki i ulepszaniu mobilności dostępnych urządzeń. Obecnie
na rynku znane są ręczne narzędzia laparoskopowe, mające 3 stopnie swobody ruchu:
1. Otwarcie i zamknięcie,
2. Rotacja wokół własnej osi,
3. Poruszanie narzędzia w przód i w tył.
Taki zakres swobody ruchy w znacznym stopniu ogranicza możliwości manipulacji wykonywanych po
wprowadzeniu narzędzia do jamy brzusznej. Druga grupą są roboty chirurgiczne sterowane za pomocą
konsoli chirurga, stanowiące najnowsze osiągnięcie w dziedzinie robotyki medycznej (obecnie na rynku
dostępny jest jeden robot da Vinci firmy Intuitive Surgical)). Cena takiego urządzenia wynosi od 2 mln
dolarów, plus koszty eksploatacji (kilkaset tysięcy zł rocznie), co zdecydowanie ogranicza dostęp do
tego rodzaju rozwiązań.
W ramach projektu planowane jest wdrożenie na rynek innowacyjnych, ręcznych i w pełni
funkcjonalnych narzędzi laparoskopowych posiadających zaawansowane mechanizmy z dziedziny
robotyki, stosowane dotąd jedynie w robotach chirurgicznych. Takie rozwiązanie pozwoli na
przeprowadzenie bardziej skomplikowanych operacji bez konieczności zakupu kosztownych robotów.
Kluczowym założeniem jest opracowanie narzędzi laparoskopowych o zwiększonej mobilność -
projektowana końcówka narzędzia laparoskopowego zostanie wyposażona w dodatkowy (4-ty)
stopień swobody tj. zdolność wykonywania ruchów zgięcie i prostowania odpowiadającego funkcji
zgięcia czy prostowania ludzkiego nadgarstka. Dodatkowy zakres ruchu ułatwi wykonywanie złożonych
czynności operacyjnych, takich jak: preparowanie naczyń lub szycie wewnątrz jamy brzusznej. Obecnie
dostępne ręczne narzędzia laparoskopowe nie posiadają tej funkcji.
Zwiększenie możliwości ruchowych końcówki narzędzia będzie wymagało również zaprojektowania
odpowiednio dostosowania uchwytu, tak by można było nim odpowiednio kierować.
Uchwyt znany laparoskopii najczęściej pozwala na obrót, wsuwanie i zaciśnięcie narzędzia, dodanie
czwartego stopnia swobody niesie za sobą konstrukcyjne wyzwanie związane z opracowaniem
zadajnika, który będzie wykorzystywał naturalne ruchy nadgarstka w zakresie zgięcia i prostowania.
Zadajniki pozycji w planowanych narzędziach będą odzwierciedlały naturalne ruchy nadgarstka, co
ułatwi ich obsługę, przyspieszy proces uczenia się i wykonywania samych zabiegów.
Planowane rozwiązanie narzędzia o dodatkowej swobodzie ruchu będzie miało zastosowanie dla
narzędzi laparoskopowych:
- haczyka do koagulacji monopolarnej,
- nożyczek,
- kleszczyków do chwytania tkanek,
- imadła do szycia laparoskopowego.
Łącznie, w wyniku projektu powstaną cztery rodzaje narzędzi laparoskopowych tworzących zestaw.

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 30 z 39 -
Kluczowymi cechami projektowanego rozwiązania wyróżniającymi go spośród produktów
konkurencyjnych, jest
1. Dodatkowy, czwarty stopień swobody pozwalający na zwiększenie zakresu ruchów i ułatwiający
dostęp do narządów w przestrzeni operacyjnej.
2. Anatomicznie dostosowany zadajnik pozycji do sterowania dodatkowym stopniem swobody, który
pozwoli na łatwiejszą i szybszą naukę,
3. Cięgnowy mechanizm przeniesienia napędu pozwalający na większą precyzję pozycjonowania w
stosunku do klasycznych laparoskopów w całym zakresie położeń kątowych przegubów;
4. Większa przestrzeń operacyjna, a ty samym większa ilość zabiegów możliwa do wykonania techniką
laparoskopową,
5. Intuicyjna obsługa, dzięki wykorzystaniu naturalnego zgięcia nadgarstka w sterowaniu dodatkowym
stopniem swobody.
6. Swobodniejszy dostęp do narządów w przestrzeni roboczej wpływający na możliwość zmniejszenia
odmy, co redukuje ryzyko odmy pooperacyjnej jako najczęstszego powikłania po
zabiegu; zmniejszenie ryzyka konieczności konwersji zabiegu laparoskopowego do klasycznego w
trakcie operacji oraz zmniejszone ryzyko niezamierzonej elektrokoagulacji w trakcie zabiegu;
7. Ergonomiczny uchwyt oraz sposób trzymania laparoskopów, zmniejszający zmęczenie chirurga w
trakcie operacji;
8. Konstrukcja nośnia wykonana z lekkich stopów tytanu - zmniejszenie wagi narzędzia, co ułatwi
operowanie narzędziem, zmniejszy inercję układu oraz podniesie czułość czucia sił
występujących w polu operacyjnym.
9. Zmniejszenie długości narzędzia, względem produktów konkurencyjnych, co poprawi sterowność i
zdolności manipulacyjne oraz zwiększy czucie siły oddziaływania narzędzia na tkankę.
10. Siłowe sprzężenie zwrotne pomiędzy narzędziem a chirurgiem, bez względu na kąt zgięcia
przegubu, co pozwoli na takie same odczuwanie przez chirurga siły z jaką działa narzędzię na
tkankę.
Wprowadzenie narzędzi laparoskopowych o zwiększonym zakresie ruchów ma ułatwić wykonywanie
złożonych czynności operacyjnych, a tym samym wprowadzić laparoskopię w standardy operacji,
dotychczas wykonywanych metodą tradycyjną poprzez nacięcie powłok brzusznych. Obecnie operacje
laparoskopowe cieszą się dużą popularnością, głownie ze względu na to, iż zmniejszają uraz
okołooperacyjny i skracają okres pooperacyjnej rekonwalescencji ,Jednocześnie jest to technika
małoinwazyjna, a więc nie pozostawia widocznych blizn na ciele pacjenta, pozwala ograniczyć
krwawienie, ograniczyć uraz narządów wewnętrznych i zaburzenia ich funkcji, a także problemy w
trakcie gojenia. Gojenie rany i powrót do zdrowia są zdecydowanie dłuższe w przypadku operacji na
otwartym brzuchu, a to sprzyja powstaniu innego rodzaju powikłań i zakażeń oraz przynosi gorszy efekt
kosmetyczny. Klasyczne operacje częściej skutkują też powstaniem zrostów w jamie brzusznej.
Laparoskopia jest dziś stosowana praktycznie we wszystkich operacjach narządów jamy brzusznej, a
technologia laparoskopowa ewaluuje i jest ciągle ulepszana. Laparoskopowe kamery przekazujące
obraz 3D są od niedawna dostępne i coraz częściej stosowane na blokach operacyjnych. Elementem,

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 31 z 39 -
który nadal stanowi o wyższości robotyki, pozostają narzędzia o zwiększonym zakresie ruchów
umożliwiające naśladowanie ruchów ludzkiego nadgarstka. W tym obszarze na rynku istnieje luka
związana z brakiem ręcznych narzędzi laparoskopowych o zaawansowanych funkcjach mobilnych,
pozwalających na wykonywanie bardziej zaawansowanych operacji w trudnodostępnych miejscach
jamy brzusznej. I należy tutaj uwzględnić również fakt, iż zastosowanie narzędzi laparoskopowych z
anatomicznie sterowanym zadajnikiem dodatkowego stopnia swobody, ułatwi procesu uczenia się.
Krótsza krzywa uczenia się z kolei umożliwi wykonywanie złożonych operacji przez większość
praktykujących chirurgów, a nie jak obecnie wąską grupę ekspertów (długa krzywa uczenia przy
skomplikowanych operacjach) i tym samym zwiększy ogólną liczbę operacji laparoskopowych.
Jednocześnie dodatkowy stopień swobody zwiększy wachlarz możliwych do wykonania metodą
laparoskopową operacji tj. operacje jelit grubego, operacje bariatryczne (operacje otyłości), operacje
nowotworów. Rezultat projektu zostanie wdrożony do działalności gospodarczej. Dystrybucja nowych
wyrobów będzie skierowana na rynek krajowy oraz rynki zagraniczne. Kluczowymi odbiorcami będą
tutaj prywatne oraz publiczne szpitale i kliniki. Wielkość rynku i zapotrzebowanie zostały możliwie
najdokładniej oszacowane i poparte wieloletnim doświadczeniem oraz wiedzą w dziedzinie chirurgii
laparoskopowej.
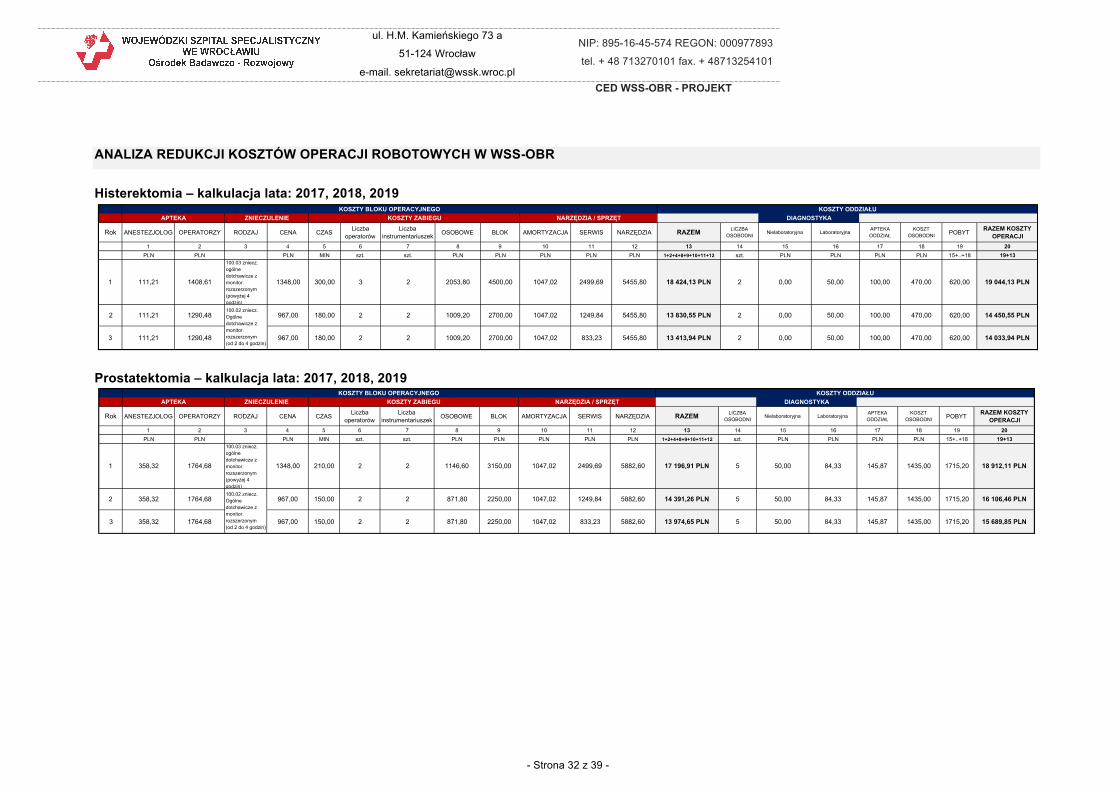
ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 32 z 39 -
ANALIZA REDUKCJI KOSZTÓW OPERACJI ROBOTOWYCH W WSS-OBR
Histerektomia – kalkulacja lata: 2017, 2018, 2019
Prostatektomia – kalkulacja lata: 2017, 2018, 2019
Rok ANESTEZJOLOG OPERATORZY RODZAJ CENA CZAS Liczba operatorów
Liczba instrumentariuszek OSOBOWE BLOK AMORTYZACJA SERWIS NARZĘDZIA RAZEM LICZBA
OSOBODNI Nielaboratoryjna Laboratoryjna APTEKA ODDZIAŁ
KOSZT OSOBODNI POBYT RAZEM KOSZTY
OPERACJI1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
PLN PLN PLN MIN szt. szt. PLN PLN PLN PLN PLN 1+2+4+8+9+10+11+12 szt. PLN PLN PLN PLN 15+..+18 19+13
1 111,21 1408,61
100.03 zniecz. ogólne dotchawicze z monitor. rozszerzonym (powyżej 4 godzin)
1348,00 300,00 3 2 2053,80 4500,00 1047,02 2499,69 5455,80 18 424,13 PLN 2 0,00 50,00 100,00 470,00 620,00 19 044,13 PLN
2 111,21 1290,48 967,00 180,00 2 2 1009,20 2700,00 1047,02 1249,84 5455,80 13 830,55 PLN 2 0,00 50,00 100,00 470,00 620,00 14 450,55 PLN
3 111,21 1290,48 967,00 180,00 2 2 1009,20 2700,00 1047,02 833,23 5455,80 13 413,94 PLN 2 0,00 50,00 100,00 470,00 620,00 14 033,94 PLN
100.02 zniecz. Ogólne dotchawicze z monitor. rozszerzonym (od 2 do 4 godzin)
KOSZTY ODDZIAŁUDIAGNOSTYKA
KOSZTY BLOKU OPERACYJNEGOAPTEKA ZNIECZULENIE KOSZTY ZABIEGU NARZĘDZIA / SPRZĘT
Rok ANESTEZJOLOG OPERATORZY RODZAJ CENA CZAS Liczba operatorów
Liczba instrumentariuszek OSOBOWE BLOK AMORTYZACJA SERWIS NARZĘDZIA RAZEM LICZBA
OSOBODNI Nielaboratoryjna Laboratoryjna APTEKA ODDZIAŁ
KOSZT OSOBODNI POBYT RAZEM KOSZTY
OPERACJI1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
PLN PLN PLN MIN szt. szt. PLN PLN PLN PLN PLN 1+2+4+8+9+10+11+12 szt. PLN PLN PLN PLN 15+..+18 19+13
1 358,32 1764,68
100.03 zniecz. ogólne dotchawicze z monitor. rozszerzonym (powyżej 4 godzin)
1348,00 210,00 2 2 1146,60 3150,00 1047,02 2499,69 5882,60 17 196,91 PLN 5 50,00 84,33 145,87 1435,00 1715,20 18 912,11 PLN
2 358,32 1764,68 967,00 150,00 2 2 871,80 2250,00 1047,02 1249,84 5882,60 14 391,26 PLN 5 50,00 84,33 145,87 1435,00 1715,20 16 106,46 PLN
3 358,32 1764,68 967,00 150,00 2 2 871,80 2250,00 1047,02 833,23 5882,60 13 974,65 PLN 5 50,00 84,33 145,87 1435,00 1715,20 15 689,85 PLN
100.02 zniecz. Ogólne dotchawicze z monitor. rozszerzonym (od 2 do 4 godzin)
KOSZTY BLOKU OPERACYJNEGO KOSZTY ODDZIAŁUAPTEKA ZNIECZULENIE KOSZTY ZABIEGU NARZĘDZIA / SPRZĘT DIAGNOSTYKA

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 33 z 39 -
Operacje jelita grubego – kalkulacja na lata 2017, 2018, 2019
Wyjaśnienie oznaczeń kolumn, oraz metodyki wyliczanych wartości: 1 apteka anestezjologia – preparaty i sprzęt używane przez anestezjologów w trakcie operacji, 2 apteka operatorzy – preparaty i sprzęt używane przez operatorów w trakcie operacji, 3 rodzaj znieczulenia – opis znieczulenia – klasyfikacja, 4 cena znieczulenia, 5 czas operacji – czas trwania operacji w minutach, 6 liczba operatorów – lekarze chirurdzy, 7 liczba instrumentariuszek – asysta pielęgniarska, 8 koszty osobowe operacji – koszt pracy operatorów oraz instrumentariuszek wyliczony na podstawie czasu trwania operacji, czasu przygotowawczo -zakończeniowego dla operatorów i instrumentariuszek, oraz odpowiednio stawek kosztu minuty pracy specjalisty w trakcie trwania operacji i kosztu minuty pracy instrumentariuszki i w trakcie trwania operacji, wg. wzoru: !"#$%&"#"(")*"+*,-./0 = 20.$(-"+*,-%",ó) ∗ !"#$%5067%&+,-.&#+*./-20#%& ∗ .$-#"+*,-./0 + .$-#+,$&9"%")-).$"$-!"ń.$*60")&;2-"+*,-#%",- +20.$(-06#%,75*6%-,07#$*! ∗ !"#$%5067%&+,-.&06#%,75*6%-,07#$!0 ∗ .$-#"+*,-./0 + .$-#+,$&9"%")-).$"$-!"ń.$*60")&;2-06#%,75*6%-,07#$!0 9 koszt bloku operacyjnego – iloczyn kosztu minuty pracy bloku operacyjnego oraz czasu trwania operacji, 10 koszt amortyzacji – amortyzacja odtworzeniowa urządzenia robotowego, obliczana przy założeniu możliwości wykonania urządzeniem w jego „cyklu życia” 8100 operacji operacyjnych, według wzoru:
!"#$%-5",%&$-./0 = !"#$%$-!7+77,$ą;$*60-,"("%")*9".-ł!")0%-20.$(-"+*,-./05"ż0)&.ℎ;")&!"6-60-7,$ą;$*60*5,"("%")&5
11 koszt serwisu – koszt czynności serwisowych producenta urządzenia robotowego wyliczony ze wzoru:
!"#$%#*,)0#7 = ,".$6&!"#$%#*,)0#77,$ą;$*60-02"ść"+*,-./0)&!"6-6&.ℎ7,$ą;$*60*5)%,-!.0*,"!7
Rok ANESTEZJOLOG OPERATORZY RODZAJ CENA CZAS Liczba operatorów
Liczba instrumentariuszek OSOBOWE BLOK AMORTYZACJA SERWIS NARZĘDZIA RAZEM LICZBA
OSOBODNI Nielaboratoryjna Laboratoryjna APTEKA ODDZIAŁ
KOSZT OSOBODNI POBYT RAZEM KOSZTY
OPERACJI1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
PLN PLN PLN MIN szt. szt. PLN PLN PLN PLN PLN 1+2+4+8+9+10+11+12 szt. PLN PLN PLN PLN 15+..+18 19+13
1 222,00 5893,20
100.03 zniecz. ogólne dotchawicze z monitor. rozszerzonym (powyżej 4 godzin)
1348,00 300,00 2 2 1888,80 4500,00 1047,02 2499,69 5029,20 22 427,91 PLN 8 0,00 71,43 284,00 2733,07 3088,50 25 516,41 PLN
2 222,00 5893,20 967,00 270,00 2 2 1721,40 4050,00 1047,02 1249,84 5029,20 20 179,66 PLN 8 0,00 71,43 284,00 2733,07 3088,50 23 268,16 PLN
3 222,00 5893,20 967,00 180,00 2 2 1219,20 2700,00 1047,02 833,23 5029,20 17 910,85 PLN 8 0,00 71,43 284,00 2733,07 3088,50 20 999,35 PLN
100.02 zniecz. Ogólne dotchawicze z monitor. rozszerzonym (od 2 do 4 godzin)
KOSZTY BLOKU OPERACYJNEGO KOSZTY ODDZIAŁUAPTEKA ZNIECZULENIE KOSZTY ZABIEGU NARZĘDZIA / SPRZĘT DIAGNOSTYKA

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 34 z 39 -
dla wyliczeń założono następującą liczbę operacji: pierwszy rok – 300 operacji sumarycznie (po 100 na zabieg) drugi rok – 600 operacji trzeci rok – 900 operacji 12 koszt narzędzi i obłożenia do robota da Vinci – koszt narzędzi używanych podczas operacji urządzeniem robotowym da Vinci, 14 liczba osobodni – średni czas pobytu pacjenta obliczony na podstawie danych Wojewódzkiego Szpitala Specjalistycznego we Wrocławiu, 15 diagnostyka nielaboratoryjna – średni koszt diagnostyki nielaboratoryjnej obliczony na podstawie danych Wojewódzkiego Szpitala Specjalistycznego we Wrocławiu, 16 diagnostyka laboratoryjna – średni koszt diagnostyki laboratoryjnej obliczony na podstawie danych Wojewódzkiego Szpitala Specjalistycznego we Wrocławiu, 17 apteka oddział – średni koszt preparatów medycznych ( leków, środków opatrunkowych, itp.) wydawanych z apteki w trakcie pobytu pacjenta na oddziale szpitalnym obliczony na podstawie danych Wojewódzkiego Szpitala Specjalistycznego we Wrocławiu, 18 koszt osobodni – iloczyn koszu pobytu Pacjenta na oddziale ( koszty oddziału)w przeliczeniu na jeden dzień*liczba dni pobytu Pacjenta na oddziale Dane finansowe opracowane przez: Wioletta Cymbała , Paweł Sajler, WSS-OBR, 2016

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 35 z 39 -
Propozycja estymacji kosztów w funkcji ilości zabiegów:
Poniżej przedstawiono koszt każdej z analizowanych operacji w funkcji ilości wykonanych operacji. Zgodnie z doniesieniami literaturowymi, ilość
przeprowadzonych operacji znacząco wpływa na jednostkowy koszt każdej z nich, w związku z redukcją kosztów cząstkowych takich jak anestezjolog, koszt
znieczulenia, koszt wykorzystania sali operacyjnej czy koszt serwisu z amortyzacją. W tabelach poniżej przedstawiono także porównawczo szacowane koszty
całkowite roczne dla każdego z zabiegów wykonywanych w Wojewódzkim Szpitalu Specjalistycznym, Ośrodku Badawczo-Rozwojowym. W tabelach wykazano
różnicę w cenie w stosunku do operacji laparoskopowych. Jak wynika z tabeli różnica ta również maleje wraz z ilością kosztów i spada z około 50% do 40% przy
dwukrotnie zwiększonej liczbie operacji.
Operacje raka odbytnicy
Tabela 1 Estymacja kosztów w funkcji ilości zabiegów : Operacja jelita grubego
ROK ILOŚĆ ZABIEGÓW KOSZT KOSZT CAŁKOWITY
RÓŻNICA DO REFUNDACJI [%]
1 100 25 516 PLN 2 551 641 PLN 1 301 641 PLN 51
2 150 23 268 PLN 3 490 224 PLN 1 615 224 PLN 46
3 200 20 999 PLN 4 199 870 PLN 1 699 870 PLN 40
Tabela 2 Estymacja kosztów w funkcji ilości zabiegów : Prostatektomia
ROK ILOŚĆ ZABIEGÓW KOSZT KOSZT CAŁKOWITY
RÓŻNICA DO REFUNDACJI [%]
1 100 18 912 PLN 1 891 211 PLN 1 041 211 PLN 55
2 150 16 106 PLN 2 415 969 PLN 1 140 969 PLN 47
3 200 15 690 PLN 3 137 970 PLN 1 437 970 PLN 46
Tabela 3 Estymacja kosztów w funkcji ilości zabiegów : Histerektomia
ROK ILOŚĆ ZABIEGÓW KOSZT KOSZT CAŁKOWITY
RÓŻNICA DO REFUNDACJI [%]
1 100 19 044 PLN 1 904 413 PLN 1 054 413 PLN 55
2 150 14 451 PLN 2 167 583 PLN 892 583 PLN 41
3 200 14 034 PLN 2 806 788 PLN 1 106 788 PLN 39

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 36 z 39 -
ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 37 z 39 -
BIBLIOGRAFIA
1. Directory, H.M.T., Pediatric Robotic-Assisted Surgery. Winifred Hayes Inc. Lansdale, PA, July 2, 2010. Updated Aug 2, 2013.
2. Institute, N.C., "NCI Dictionary of Cancer Terms: Levels of evidence". 2014: US DHHS-National Institutes of Health.
3. Medicine, C.f.E.-B., "Oxford Centre for Evidence-based Medicine – Levels of Evidence (March 2009)". 2015.
4. Ballini, L., et al., A method for addressing research gaps in HTA, developed whilst evaluating robotic-assisted surgery: a proposal. Health Research Policy and Systems, 2010. 8.
5. Liberati, A., T.A. Sheldon, and H.D. Banta, EUR-ASSESS project subgroup report on methodology - Methodological guidance for the conduct of health technology assessment. International Journal of Technology Assessment in Health Care, 1997. 13(2): p. 186-219.
6. Guyatt, G.H., et al., GRADE: an emerging consensus on rating quality of evidence and strength of recommendations. British Medical Journal, 2008. 336(7650): p. 924-926.
7. Wright, J.D., et al., Robotically Assisted vs Laparoscopic Hysterectomy Among Women With Benign Gynecologic Disease EDITORIAL COMMENT. Obstetrical & Gynecological Survey, 2013. 68(6): p. 430-431.
8. Reza, M., et al., Meta-analysis of observational studies on the safety and effectiveness of robotic gynaecological surgery. British Journal of Surgery, 2010. 97(12): p. 1772-1783.
9. Chen, C.H., et al., Comparison of robotic approach, laparoscopic approach and laparotomy in treating epithelial ovarian cancer. International Journal of Medical Robotics and Computer Assisted Surgery, 2016. 12(2): p. 268-275.
10. Bougherara, L., et al., Robotic Surgery in Gynecologic Oncology. Oncologie, 2016. 18(5): p. 287-297.
11. Callewaert, G., et al., Laparoscopic versus robotic-assisted sacrocolpopexy for pelvic organ prolapse: a systematic review. Gynecological Surgery, 2016. 13(2): p. 115-123.
12. Cohn, D.E., et al., A Prospective, Comparative Study for the Evaluation of Postoperative Pain and Quality of Recovery in Patients Undergoing Robotic Versus Open Hysterectomy for Staging of Endometrial Cancer. Journal of Minimally Invasive Gynecology, 2016. 23(3): p. 429-434.
13. Herling, S.F., et al., Cost-analysis of robotic-assisted laparoscopic hysterectomy versus total abdominal hysterectomy for women with endometrial cancer and atypical complex hyperplasia. Acta Obstetricia Et Gynecologica Scandinavica, 2016. 95(3): p. 299-308.
14. Cadiere, G.B., et al., Evaluation of telesurgical (robotic) NISSEN fundoplication. Surgical Endoscopy-Ultrasound and Interventional Techniques, 2001. 15(9): p. 918-923.
15. Giulianotti, P.C., et al., Robotics in general surgery - Personal experience in a large community hospital. Archives of Surgery, 2003. 138(7): p. 777-784.
16. Ruurda, J.P., et al., Feasibility of robot-assisted laparoscopic surgery - An evaluation of 35 robot-assisted laparoscopic cholecystectomies. Surgical Laparoscopy Endoscopy & Percutaneous Techniques, 2002. 12(1): p. 41-45.
17. Talamini, M.A., et al., A prospective analysis of 211 robotic-assisted surgical procedures. Surgical Endoscopy and Other Interventional Techniques, 2003. 17(10): p. 1521-1524.
18. Breitenstein, S., et al., Robotic-assisted versus laparoscopic cholecystectomy - Outcome and cost analyses of a case-matched control study. Annals of Surgery, 2008. 247(6): p. 987-993.
19. Gurusamy, K.S., et al., Robot assistant versus human or another robot assistant in patients undergoing laparoscopic cholecystectomy. Cochrane Database of Systematic Reviews, 2012(9).
20. Aranha, G., et al., Robotic distal pancreatectomy: Cost effective? Discussion. Surgery, 2010. 148(4): p. 821-823.
21. Waters, J.A., et al., Robotic distal pancreatectomy: Cost effective? Surgery, 2010. 148(4): p. 814-821.
22. Kang, C.M., et al., Conventional laparoscopic and robot-assisted spleen-preserving pancreatectomy: does da Vinci have clinical advantages? Surgical Endoscopy and Other Interventional Techniques, 2011. 25(6): p. 2004-2009.

ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 38 z 39 -
23. Daouadi, M., et al., Robot-Assisted Minimally Invasive Distal Pancreatectomy Is Superior to the Laparoscopic Technique. Annals of Surgery, 2013. 257(1): p. 128-132.
24. Marano A, C.Y., Hyung WJ, Kim YM, Kim J, Noh SH Robotic versus laparoscopic versus open gastrectomy: a metaanalysis. . J Gastric Cancer 2013. 12(2): p. 136-148.
25. Caruso, S., et al., Open vs robot-assisted laparoscopic gastric resection with D2 lymph node dissection for adenocarcinoma: a case-control study. International Journal of Medical Robotics and Computer Assisted Surgery, 2011. 7(4): p. 452-458.
26. Liu, X.X., et al., Full robot-assisted gastrectomy with intracorporeal robot-sewn anastomosis produces satisfying outcomes. World Journal of Gastroenterology, 2013. 19(38): p. 6427-6437.
27. Vasilescu, C., O. Stanciulea, and S. Tudor, Laparoscopic versus robotic subtotal splenectomy in hereditary spherocytosis. Potential advantages and limits of an expensive approach. Surgical Endoscopy and Other Interventional Techniques, 2012. 26(10): p. 2802-2809.
28. Gelmini, R., et al., Laparoscopic Splenectomy: Conventional Versus Robotic Approach-A Comparative Study. Journal of Laparoendoscopic & Advanced Surgical Techniques, 2011. 21(5): p. 393-398.
29. Pineda-Solis, K., H. Medina-Franco, and M.J. Heslin, Robotic versus laparoscopic adrenalectomy: a comparative study in a high-volume center. Surgical Endoscopy and Other Interventional Techniques, 2013. 27(2): p. 599-602.
30. Brandao, L.F., et al., Robotic Versus Laparoscopic Adrenalectomy: A Systematic Review and Meta-analysis. European Urology, 2014. 65(6): p. 1154-1161.
31. D'Annibale, A., et al., Total mesorectal excision: a comparison of oncological and functional outcomes between robotic and laparoscopic surgery for rectal cancer. Surgical Endoscopy and Other Interventional Techniques, 2013. 27(6): p. 1887-1895.
32. Kang, J., et al., The Impact of Robotic Surgery for Mid and Low Rectal Cancer A Case-Matched Analysis of a 3-Arm Comparison-Open, Laparoscopic, and Robotic Surgery. Annals of Surgery, 2013. 257(1): p. 95-101.
33. Barnajian, M., et al., Quality of total mesorectal excision and depth of circumferential resection margin in rectal cancer: a matched comparison of the first 20 robotic cases. Colorectal Disease, 2014. 16(8): p. 603-609.
34. Halabi, W.J., et al., Robotic-assisted Colorectal Surgery in the United States: A Nationwide Analysis of Trends and Outcomes. World Journal of Surgery, 2013. 37(12): p. 2782-2790.
35. Kwak, J.M. and S.H. Kim, Robotic Surgery for Rectal Cancer: An Update in 2015. Cancer Research and Treatment, 2016. 48(2): p. 427-435.
36. Cundy, T.P., et al., Robot-Assisted Minimally Invasive Surgery for Pediatric Solid Tumors: A Systematic Review of Feasibility and Current Status. European Journal of Pediatric Surgery, 2014. 24(2): p. 127-135.
37. Cundy, T.P., et al., International attitudes of early adopters to current and future robotic technologies in pediatric surgery. Journal of Pediatric Surgery, 2014. 49(10): p. 1522-1526.
38. Alqahtani, A., et al., Robot-Assisted Pediatric Surgery: How Far Can We Go? World Journal of Surgery, 2010. 34(5): p. 975-978.
39. Albadine, R., et al., Characteristics of positive surgical margins in robotic-assisted radical prostatectomy, open retropubic radical prostatectomy, and laparoscopic radical prostatectomy: a comparative histopathologic study from a single academic center. Human Pathology, 2012. 43(2): p. 254-260.
40. Alemzadeh, H., et al., Adverse Events in Robotic Surgery: A Retrospective Study of 14 Years of FDA Data. Plos One, 2016. 11(4).
41. Allan, C. and D. Ilic, Laparoscopic versus Robotic-Assisted Radical Prostatectomy for the Treatment of Localised Prostate Cancer: A Systematic Review. Urologia Internationalis, 2016. 96(4): p. 373-378.
42. Basto, M., et al., Patterns-of-care and health economic analysis of robot-assisted radical prostatectomy in the Australian public health system. Bju International, 2016. 117(6): p. 930-939.
43. Bijlani, A., et al., A Multidimensional Analysis of Prostate Surgery Costs in the United States: Robotic-Assisted versus Retropubic Radical Prostatectomy. Value in Health, 2016. 19(4): p. 391-403.
44. Chang, Y.F., et al., Robotic-assisted Laparoscopic Radical Prostatectomy From a Single Chinese Center: A Learning Curve Analysis. Urology, 2016. 93: p. 104-111.
45. Fournier, G., Impact of the robotic assistance on surgical practice. Oncologie, 2016. 18(5): p. 336-338.
ul. H.M. Kamieńskiego 73 a
51-124 Wrocław
e-mail. [email protected]
NIP: 895-16-45-574 REGON: 000977893
tel. + 48 713270101 fax. + 48713254101
CED WSS-OBR - PROJEKT
- Strona 39 z 39 -
46. Gandaglia, G., et al., Novel Technologies in Urologic Surgery: a Rapidly Changing Scenario. Current Urology Reports, 2016. 17(3).
47. Riikonen, J., et al., Initiation of robot-assisted radical prostatectomies in Finland: Impact on centralization and quality of care. Scandinavian Journal of Urology, 2016. 50(3): p. 149-154.
48. Jimenez-Rodriguez, R.M., et al., Learning curve in robotic rectal cancer surgery: current state of affairs. International Journal of Colorectal Disease, 2016. 31(12): p. 1807-1815.
49. Foo, C.C. and W.L. Law, The Learning Curve of Robotic-Assisted Low Rectal Resection of a Novice Rectal Surgeon. World Journal of Surgery, 2016. 40(2): p. 456-462.