
4.3制御ループ例 4.3.1カスケード制御 4.3.2比率制御 (1)概説・・・・2つのプロセス変数が、設定した比率になるように制御する方式です。(2)機能・・・・比率制御のループ例
Chapter 6
ロバスト制御
線形制御理論は,状態空間モデルに基づく制御系設計法である。こ
の状態空間モデルは,制御系の設計目的に基づいて適当な仮定の下
で制御対象の特性を表現 (近似)したものである。したがって,その
表現が妥当なものであるならば,得られた制御器は制御対象に対し
て良好に動作すると考えてよい。しかし,場合によっては,状態空
間モデルに反映されていない制御対象の特性が閉ループ系の特性に
影響を及ぼし,希望した応答が得られないことも起こり得る。もし,
制御器を設計する前に,モデルに正しく表現されていない特性を何
らかの形で表現し,それを設計に反映させることができるならば,
このような問題を解決することが可能となる。これをロバスト制御
問題と呼び,近年活発な研究が行われている分野の一つである。本
章では,このロバスト制御の概要について述べる。
6.1 なぜロバスト制御が必要なのか
最初に,柔軟ビーム振動制御問題を通してロバスト制御の必要性を明確にしよう。
柔軟ビーム振動系に対する状態空間モデルは,発生する振動が無限個の振動モードの重
ね合わせとして表現されることに対応して,無限次元をもつことは 1章で示した。これに
対して,5章までで述べた全状態観測器を利用した状態フィードバック制御を構成しようと
すると,制御器は無限次元となる。そこで,高次モードを無視した低次元モデル (3次振動
モードまでを考慮) を柔軟ビームに対する設計モデルy とみなした。高次振動モードを無視
する工学的な背景には,一般の柔軟構造物を考えた場合,そこに発生する振動の支配的な
ものは低次の振動モードであることや高次になるほど物理パラメータを正確に求めること
y以下,制御系の設計を目的としたものである場合,それを強調するために設計モデルと呼ぶ
{ 6.1 {

{ 6.2 { CHAPTER 6. ロバスト制御
が困難となることなどが挙げられる。3次振動モードまでを考慮した設計モデルを改めて
次式に示す。
2664 _x1
_x2
_x3
3775 = diagfA1; A2; A3g
2664 x1
x2
x3
3775+
2664 b1
b2
b3
3775uñy = [c1 c2 c3]
2664 x1
x2
x3
3775(6:1)
前章まではこの設計モデルが正しいと考えて観測量を y としたが,実際には 4次以上の高
次振動モードを無視しているという意味で,上式では ñy としていることに注意してほしい。
この設計モデル (6:1) に対して構成した制御器を実際の柔軟ビーム振動系に適用した場合
を考えてみる。この場合,状態観測器に対する入力は (ñy ではなく) 観測量 y であるため,
4次以上の高次振動モードの影響を受け状態推定に誤差が生まれる。さらにその推定値 x
に基づいて計算された操作量 u = ÄKx は,[bT4 ; bT5 ;ÅÅÅ]T を通して,設計モデルで考慮し
ていない高次振動モードに影響を及ぼす。そのため,制御器の設計によってはそれらを励
起し,閉ループ系が不安定となる場合が起こり得る。この現象を スピルオーバ (spill-over)
と呼ぶ。設計モデルのもつ不確かさによって生じる不安定現象の典型的な例である。スピ
ルオーバを回避するためには,設計モデルが不確かさをもつ (高次振動モードが含まれてい
ない) という立場にたって,制御器の設計を行う必要がある。
5章までに述べた設計法は,状態空間モデルという 1つの設計モデルに対して構成され
たものである。もし,設計モデルが制御対象の特性を十分正しく表現しているとしてよい
場合には,それに基づいて設計した制御器は,制御対象に対しても設計者の要求通りに機
能することが期待される。しかし,一般に,設計モデルは様々な仮定の下で導出されてお
り,なんらかの不確かさを必ず含む。このことは,あるモデルの集合に対して設計者の要
求を満たす制御器を設計することが必要であることを意味する。このような制御問題を ロ
バスト制御問題 (robust control problem) と呼ぶ。特に,設計要求が閉ループ系の安定性の
保証にある場合を,ロバスト安定化 (robust stabilization) と呼ぶ。柔軟ビームの振動制御に
おけるスピルオーバ回避の問題はこれに含まれる。線形制御理論は,これまでに多くの制
御対象に対して適用されその有効性が示されてきたが,モデリングにおいて避けられない
このような不確かさに対して合理的な取扱いが可能となれば,より実際的な設計法への発
展が期待される。ロバスト制御の必要性がここにある。
なお,次節以降ではロバスト制御というよりは H1制御 (H1control) を主に扱う。これ
は,周波数整形を基本とする H1制御問題は,ロバスト制御問題も含めて非常に広い範囲
の問題を扱うことができるためである。

6.2. 数学的準備 { 6.3 {
6.2 数学的準備
H1制御の議論を始める前の数学的準備として,いくつかの概念を以下にまとめておく。
なお,本章ならびに次章では,状態空間モデル
_x = Ax+Bu
y = Cx+Du
に対する伝達行列 G(s) = D + C(sI ÄA)Ä1B の表記法として,
G(s) =
24 A B
C D
35もしくは,G(s) = fA;B;C;Dg を使用する。
6.2.1 プロパー性
2章でも述べたように,伝達関数 G(s) は多項式の比として与えられる。もし,分母多項
式の次数が分子多項式の次数に等しいかまたは高いとき,それを プロパー (proper)な伝達
関数と呼ぶ。特に,厳密に分母多項式の方が次数が高い場合には 厳密にプロパー (strictly
proper)な伝達関数と呼ぶ。直達項のない状態空間モデル (1入出力系)
_x = Ax+ bu
y = cx
に対する伝達関数は厳密にプロパーであり,直達項がある (y = cx+ du)場合はプロパーな
伝達関数となる。伝達関数 G(s) がプロパーか厳密にプロパーかの違いは,
lims!1 G(s)
を求めたときに,前者が 0 以外の定数になるのに対して,後者は 0 になることである。
伝達関数の分子多項式の次数の方が分母多項式のそれよりも大きい場合,ノンプロパー
(non-proper)な伝達関数と呼ぶ。プロパーな伝達関数は状態空間実現をもつがノンプロパー
な場合,状態空間実現をもたない。
多入出力系の場合,入出力関係は伝達行列で表されるが,その要素すべてが (厳密に)プ
ロパーな伝達関数である場合,(厳密に)プロパーな伝達行列と呼ぶ。
6.2.2 特異値
伝達行列 G(s) 2 R(s)rÇm の 特異値 (singular value) õi(!) は
õi(!) =qïi(GÉ(j!)G(j!)) (i = 1;ÅÅÅ;m) (6:2)

{ 6.4 { CHAPTER 6. ロバスト制御
で与えられるy。ここで,Éは複素共役転置 (GÉ(j!) = GT (Äj!)),ïi は固有値を意味する。
特異値の最大 (最小)値を 最大 (最小)特異値 (maximum(minimum) singular value) といい,
ñõ(õ) と記述する。行列 GÉ(j!)G(j!) はエルミート行列 (Hermitian matrix) でありz,その
固有値は非負の実数となる。したがって,特異値は実数であり,周波数 ! の関数となる。
また,定義から明らかなように,スカラ伝達関数 G(s) に対しては,特異値 õ(!) とゲイン
jG(j!)j が一致する。
特異値に関する基本公式のいくつかを以下に示す。なお,A;B は適当な大きさの複素行
列である。
ñõ(A) ï 0
ñõ(A) = 0, A = 0
ñõ(AÄ1) = 1=õ(A) (Aが正則であると仮定)
ñõ(A) î I , I ÄAÉA ï 0
ñõ(AB) î ñõ(A)ñõ(B)
õ(AB) ï õ(A)õ(B)
(6:3)
6.2.3 内部安定性
2章で述べたように,系が漸近安定であるための必要十分条件は,システム行列 A の極
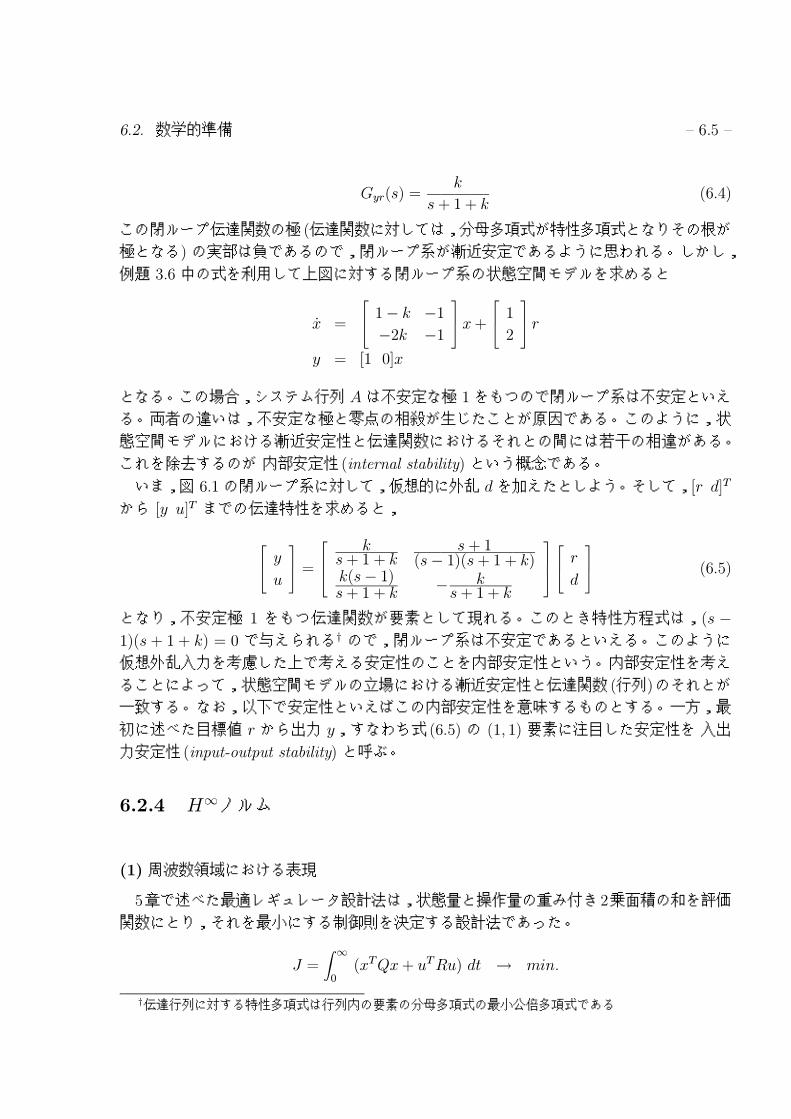
の実部がすべて負であることであった。それでは,図 6:1 に示すフィードバック制御系の
漸近安定性を考えてみよう。
+
-(s-1)/(s+1)k
r y
d
u
+
+1/(s-1)
図 6.1 内部安定性
この制御系は,例題 3:6 の直列結合した系に対してゲイン k(> 0) の比例制御を施した
ものである。これに対して,目標入力 r から出力 y までの閉ループ伝達関数 Gyr を求め
ると次式が得られる。
yR(s)rÇm は実係数をもつ有理伝達関数を要素としてもつ r Çm次伝達行列の集合を表す。zAÉ= A の性質をもつ複素行列をエルミート行列と呼ぶ。
6.2. 数学的準備 { 6.5 {
Gyr(s) =k
s+ 1 + k(6:4)
この閉ループ伝達関数の極 (伝達関数に対しては,分母多項式が特性多項式となりその根が
極となる) の実部は負であるので,閉ループ系が漸近安定であるように思われる。しかし,
例題 3:6 中の式を利用して上図に対する閉ループ系の状態空間モデルを求めると
_x =
24 1Ä k Ä1
Ä2k Ä1
35x+
24 1
2
35 ry = [1 0]x
となる。この場合,システム行列 A は不安定な極 1 をもつので閉ループ系は不安定といえ
る。両者の違いは,不安定な極と零点の相殺が生じたことが原因である。このように,状
態空間モデルにおける漸近安定性と伝達関数におけるそれとの間には若干の相違がある。
これを除去するのが 内部安定性 (internal stability) という概念である。
いま,図 6:1 の閉ループ系に対して,仮想的に外乱 d を加えたとしよう。そして,[r d]T
から [y u]T までの伝達特性を求めると,
24 y
u
35 =
264 ks+ 1 + k
s+ 1(sÄ 1)(s+ 1 + k)
k(sÄ 1)s+ 1 + k Ä k
s+ 1 + k
37524 r
d
35 (6:5)
となり,不安定極 1 をもつ伝達関数が要素として現れる。このとき特性方程式は,(s Ä1)(s + 1 + k) = 0 で与えられるy ので,閉ループ系は不安定であるといえる。このように
仮想外乱入力を考慮した上で考える安定性のことを内部安定性という。内部安定性を考え
ることによって,状態空間モデルの立場における漸近安定性と伝達関数 (行列)のそれとが
一致する。なお,以下で安定性といえばこの内部安定性を意味するものとする。一方,最
初に述べた目標値 r から出力 y,すなわち式 (6:5) の (1; 1) 要素に注目した安定性を 入出
力安定性 (input-output stability) と呼ぶ。
6.2.4 H1ノルム
(1) 周波数領域における表現
5章で述べた最適レギュレータ設計法は,状態量と操作量の重み付き2乗面積の和を評価
関数にとり,それを最小にする制御則を決定する設計法であった。
J =Z 1
0(xTQx+ uTRu) dt ! min:
y伝達行列に対する特性多項式は行列内の要素の分母多項式の最小公倍多項式である
{ 6.6 { CHAPTER 6. ロバスト制御
これに対して,H1制御は漸近安定な伝達行列 (要素の伝達関数すべてが漸近安定な伝達行
列) に対する H1ノルム (H1norm) と呼ばれる大きさを評価関数とした設計法である。こ
の H1ノルムは次のように定義される。
定義 6. 1 (H1ノルム)
漸近安定な伝達行列 G(s) に対して H1ノルムは次式で与えられる。
kGk1 = sup!
ñõ(G(j!)) (6:6)
ここで,sup は最大値 (正確には上限値) を意味する。
H1ノルムの工学的な意味を明確にするために,スカラ伝達関数 G(s) に対して H1ノル
ムを求めると,次の関係式が得られる。
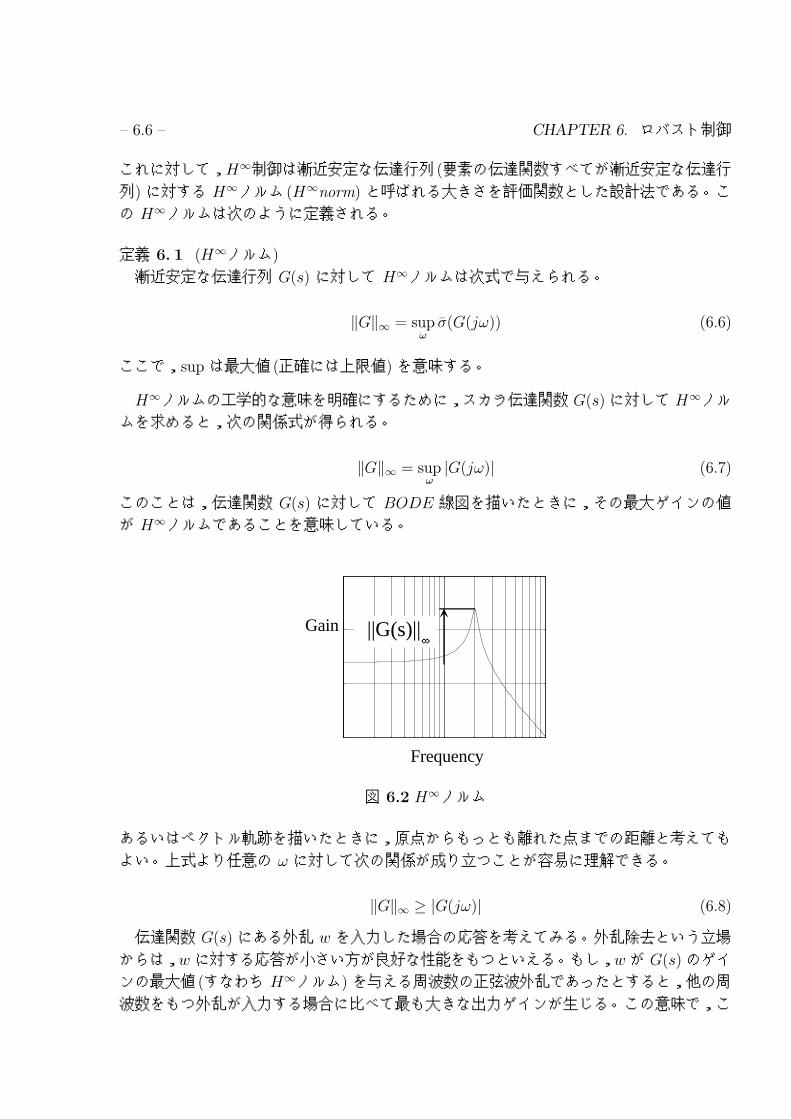
kGk1 = sup!jG(j!)j (6:7)
このことは,伝達関数 G(s) に対して BODE 線図を描いたときに,その最大ゲインの値
が H1ノルムであることを意味している。
Frequency
||G(s)||∞
Gain
図 6.2 H1ノルム
あるいはベクトル軌跡を描いたときに,原点からもっとも離れた点までの距離と考えても
よい。上式より任意の ! に対して次の関係が成り立つことが容易に理解できる。
kGk1 ï jG(j!)j (6:8)
伝達関数 G(s) にある外乱 w を入力した場合の応答を考えてみる。外乱除去という立場
からは,w に対する応答が小さい方が良好な性能をもつといえる。もし,w が G(s) のゲイ
ンの最大値 (すなわち H1ノルム) を与える周波数の正弦波外乱であったとすると,他の周
波数をもつ外乱が入力する場合に比べて最も大きな出力ゲインが生じる。この意味で,こ
6.2. 数学的準備 { 6.7 {
のような外乱を 最悪外乱 (worst case disturbance) と呼ぶ。H1ノルムを評価にとる (H1ノ
ルムをできるだけ小さくする) ということは,系にとって最悪な外乱に対する特性を低減
することをめざしていると言い替えることができる。
(2) 時間領域における表現
(1) では H1ノルムの周波数領域における側面をながめたが,時間領域における定義も
与えることができる。その準備として,L2 ノルムを定義する。
定義 6. 2 (L2 ノルム)
時間関数ベクトル x(t) に対して L2 ノルム kx(t)k2 を次式で定義する。
kx(t)k2 =íZ 1
0xT (t)x(t)dt
ì1=2
(6:9)
この L2 ノルムを用いることで H1ノルムを次のようにも定義できる。
定義 6. 3 (H1ノルム)
漸近安定な伝達行列 G(s) をもつ系に対して,有界な L2 ノルムをもつ u(t) を入力した
ときの出力を y(t) (ただし,初期状態は 0) とする。このとき,
kGk1 = supu6=0
ky(t)k2
ku(t)k2(6:10)
L2 ノルムはその時間関数のもつエネルギに相当するので,H1ノルムが 1 よりも小さい系
は,入力信号のもつエネルギが系を通過することで必ず減少することを意味する。
(3) ブロック行列に対する H1ノルムçççççç24 G11 G12
G21 G22
35çççççç1î ç (6:11)
であるならば,
kGijk1 î ç (i; j = 1; 2) (6:12)
が成り立つ。
6.2.5 スモールゲイン定理
ロバスト安定性に関連する重要な定理として スモールゲイン定理 (small gain theorem)
がある。本項では,この定理を紹介する。図6:3 に示すフィードバック制御系を考える。
図中,G(s) ならびに Å(s) はいずれも漸近安定な伝達行列とする。このとき,次の定理が
成り立つ。

{ 6.8 { CHAPTER 6. ロバスト制御
G(s)
Δ(s)
図 6.3 スモールゲイン定理
定理 6. 1 (スモールゲイン定理)
図6:3 の閉ループ系が漸近安定であるための十分条件は,
kÅGk1 < 1 (6:13)
である。
G(s) がスカラ伝達関数とすると,H1ノルムの性質から,定理中のノルム条件は一巡伝
達関数 ÅG のベクトル軌跡が原点を中心とする単位円内に留まることを意味する。した
がって,ナイキストの安定定理から,スモールゲイン定理は閉ループ系の漸近安定性に対
して十分条件を意味していることは明らかである。
6.2.6 伝達行列の実現
次に,伝達行列に関するいくつかの演算に対応した状態空間実現を与える。それぞれの
導出過程は省略するが,いずれも簡単な計算で確認できるので各自確認してほしい。
(1) 逆システム
伝達行列 G(s) が正方 (入出力数が同じ) でその直達行列 D の逆が存在するとき,逆シ
ステムは次式で与えられる。伝達行列は入力 u に対する出力 y の伝達特性を与えるもので
あるが,逆システムは y を入力としたときに u を出力する系を意味する。
GÄ1(s) =
24 AÄBDÄ1C BDÄ1
ÄDÄ1C DÄ1
35 (6:14)
(2) 相似変換
相似変換に対して伝達行列が不変であることから,24 TATÄ1 TB
CTÄ1 D
35 =
24 A B
C D
35 (6:15)
6.2. 数学的準備 { 6.9 {
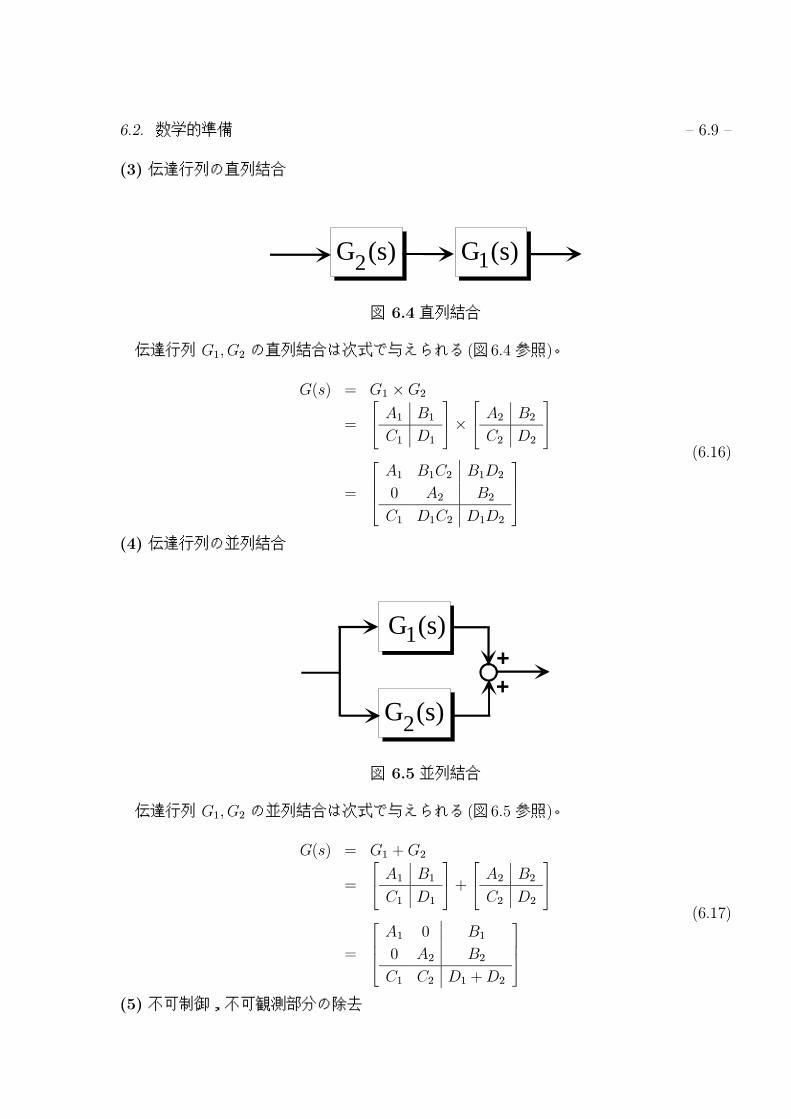
(3) 伝達行列の直列結合
G2(s) G (s)1
図 6.4 直列結合
伝達行列 G1; G2 の直列結合は次式で与えられる (図6:4 参照)。
G(s) = G1 ÇG2
=
24 A1 B1
C1 D1
35Ç 24 A2 B2
C2 D2
35=
2664 A1 B1C2 B1D2
0 A2 B2
C1 D1C2 D1D2
3775(6:16)
(4) 伝達行列の並列結合
G2(s)
G (s)1++
図 6.5 並列結合
伝達行列 G1; G2 の並列結合は次式で与えられる (図6:5 参照)。
G(s) = G1 +G2
=
24 A1 B1
C1 D1
35+
24 A2 B2
C2 D2
35=
2664 A1 0 B1
0 A2 B2
C1 C2 D1 +D2
3775(6:17)
(5) 不可制御,不可観測部分の除去
{ 6.10 { CHAPTER 6. ロバスト制御
伝達行列は入出力特性を表すものなので,不可制御や不可観測な部分を除去することが
できる。たとえば, 2664 A1 A12 B1
0 A2 0
C1 C2 D
3775 ;2664 A1 0 B1
A21 A2 B2
C1 0 D
3775 (6:18)
の場合,前者は A2 の極が不可制御な極,後者は不可観測な極であるので,いずれも入出
力特性を変えることなく次式の伝達行列に低次元化できる。24 A1 B1
C1 D
35 (6:19)
6.3 H1ノルム評価に基づく制御系設計仕様
P(s)K(s)-
r e u y
dydu
+
+
+
++
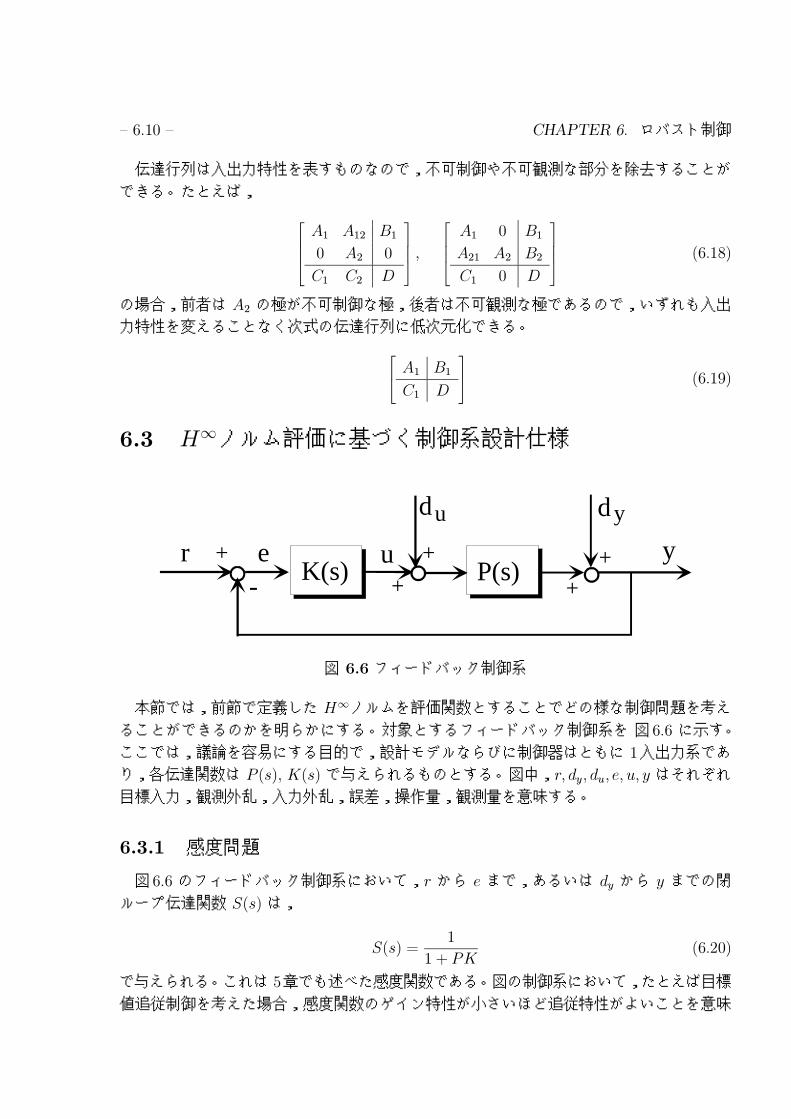
図 6.6 フィードバック制御系
本節では,前節で定義した H1ノルムを評価関数とすることでどの様な制御問題を考え
ることができるのかを明らかにする。対象とするフィードバック制御系を 図6:6 に示す。
ここでは,議論を容易にする目的で,設計モデルならびに制御器はともに 1入出力系であ
り,各伝達関数は P (s), K(s) で与えられるものとする。図中,r; dy; du; e; u; y はそれぞれ
目標入力,観測外乱,入力外乱,誤差,操作量,観測量を意味する。
6.3.1 感度問題
図6:6 のフィードバック制御系において,r から e まで,あるいは dy から y までの閉
ループ伝達関数 S(s) は,
S(s) =1
1 + PK(6:20)
で与えられる。これは 5章でも述べた感度関数である。図の制御系において,たとえば目標
値追従制御を考えた場合,感度関数のゲイン特性が小さいほど追従特性がよいことを意味

6.3. H1ノルム評価に基づく制御系設計仕様 { 6.11 {
する。しかし,不必要に高い周波数帯域まで高い追従性能をもつような設計を行うと,必
要以上のアクチュエータの能力を要求することになり,好ましい設計であるとはいえない。
適切な追従帯域は制御目的によって異なるが,通常は低周波数帯域で追従特性がよい,す
なわち感度関数のゲインが低いことが要求される。
そこで,設計仕様が,ある伝達関数 W (s) と正の実数 çを用いて
jS(j!)j < çjW (j!)jÄ1 for all ! (6:21)
と表されたとしよう (図6:7)。
40
20
0
-20
-4010-1 100 101 102 103
Freq.[rad/s]
γ |W(jω)| -1
|S(j )|ω
Gain[dB]
図 6.7 感度問題
上式は,H1ノルムの定義を用いると,
kWSk1 < ç (6:22)
と書き表される。このように感度関数に対する設計仕様は,H1ノルムを使用して表現で
きることがわかる。上式において,設計モデル P (s) ならびに設計仕様 ç; W (s) は与えら
れているので,閉ループ系が漸近安定でノルム条件を満足する制御器 K(s) を設計する問
題となる。これが 感度問題 (sensitivity problem) である。
前述のとおり,感度関数は外乱 dy から出力 y までの閉ループ伝達関数でもあるので,本
問題は外乱抑制の立場からも考えることができる。
6.3.2 準感度問題
次に,du から y までの閉ループ特性を考える。これは,柔軟ビーム振動制御問題に対
応させることができる。つまり,柔軟ビームには力外乱 du が加わることで振動が発生し,
制御器は柔軟ビームから手に入れた情報 y に基づいて計算した操作量 (力) u を加える場合
{ 6.12 { CHAPTER 6. ロバスト制御
である。外乱ならびに操作量がともに力として柔軟ビームに与えられることに注意してほ
しい。このときの制御目的は,力外乱の影響が柔軟ビームの出力に現れない,言い換える
と外乱によって発生した振動が素早く減衰するようにすることである。感度問題の場合と
同様に,力外乱 du から出力 y までの閉ループ伝達関数を求めると,
P
1 + PK(6:23)
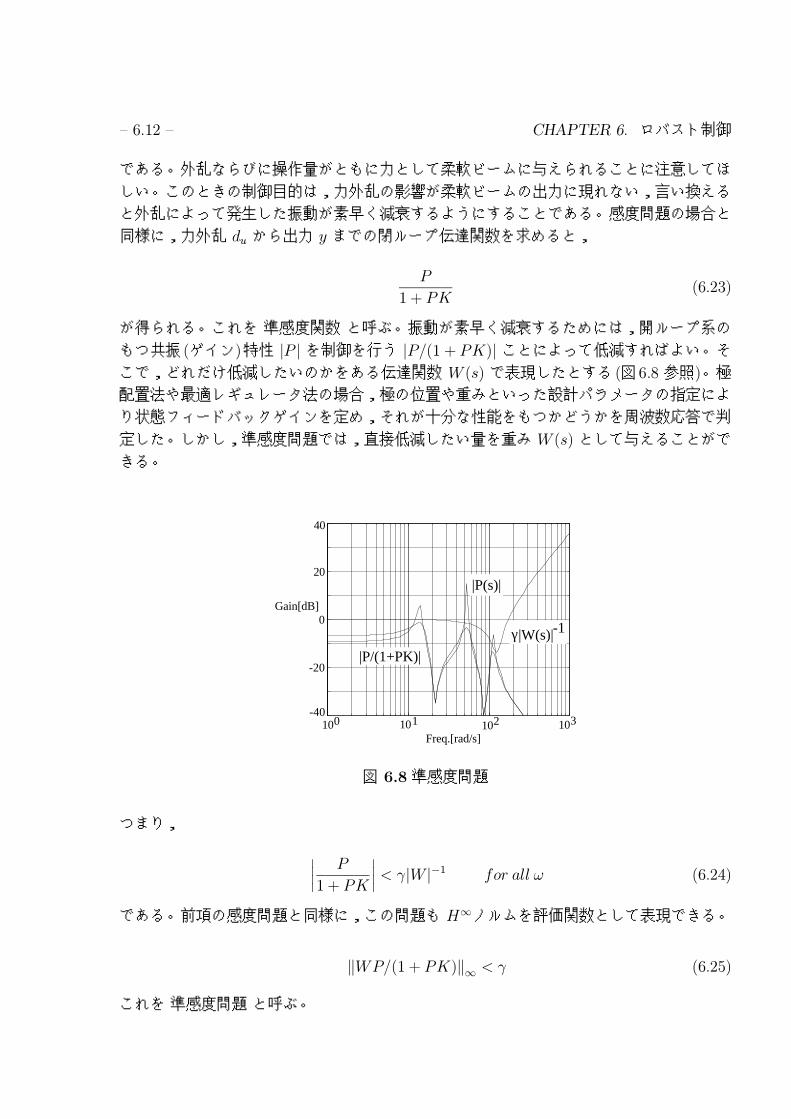
が得られる。これを 準感度関数 と呼ぶ。振動が素早く減衰するためには,開ループ系の
もつ共振 (ゲイン)特性 jP j を制御を行う jP=(1 + PK)j ことによって低減すればよい。そ
こで,どれだけ低減したいのかをある伝達関数 W (s) で表現したとする (図6:8 参照)。極
配置法や最適レギュレータ法の場合,極の位置や重みといった設計パラメータの指定によ
り状態フィードバックゲインを定め,それが十分な性能をもつかどうかを周波数応答で判
定した。しかし,準感度問題では,直接低減したい量を重み W (s) として与えることがで
きる。
100 101 102 103-40
-20
0
20
40
Freq.[rad/s]
γ |W(s)|-1
|P(s)|
|P/(1+PK)|
Gain[dB]
図 6.8 準感度問題
つまり, åååå P
1 + PK
åååå< çjW jÄ1 for all ! (6:24)
である。前項の感度問題と同様に,この問題も H1ノルムを評価関数として表現できる。
kWP=(1 + PK)k1 < ç (6:25)
これを 準感度問題 と呼ぶ。
6.3. H1ノルム評価に基づく制御系設計仕様 { 6.13 {
6.3.3 ロバスト安定化 (1)
本章の初めにも述べたように,モデルに基づく制御系の設計では,設計モデルの良否が
制御性能に大きく関係する。設計モデルのもつ不確かさに対しても,性能が保証される (こ
のような性質のことを ロバスト性能 (robust performance) という) ことが望ましいが,こ
こでは,不確かさの存在に対して,少なくとも漸近安定性を保証するロバスト安定化につ
いて考える。
P(s)K (s)-+
++
PΔ(s)
Δ (s)a
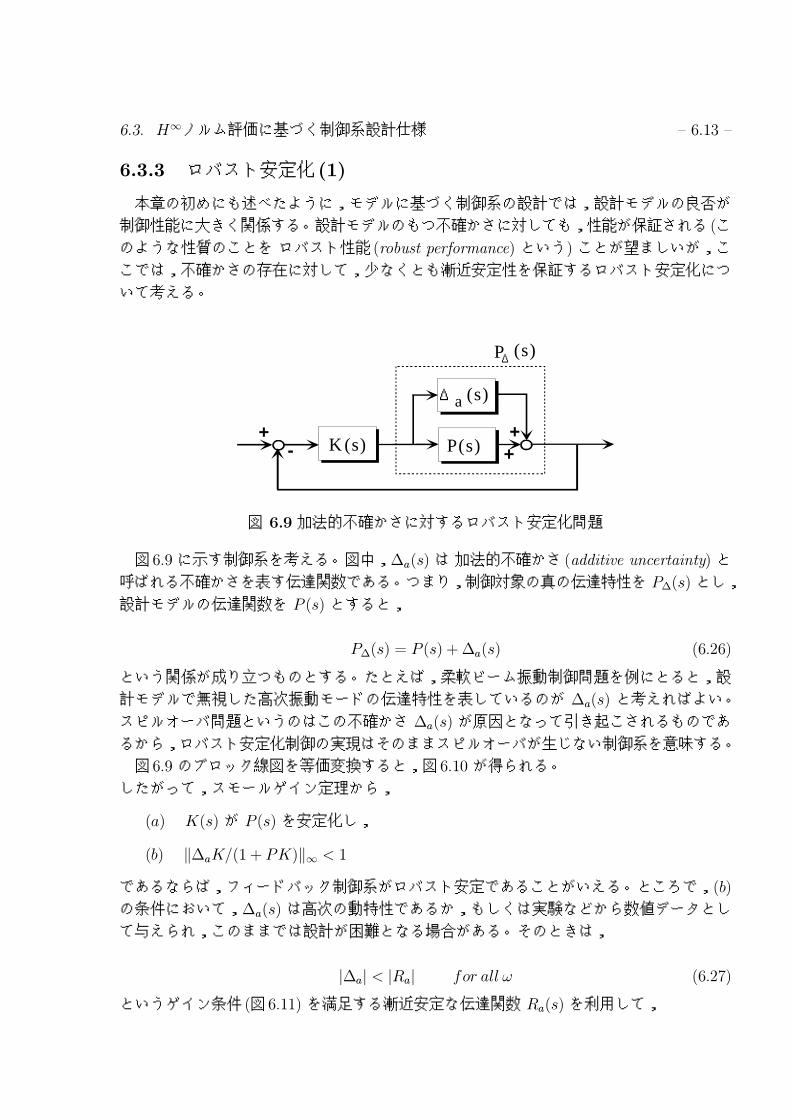
図 6.9 加法的不確かさに対するロバスト安定化問題
図6:9 に示す制御系を考える。図中,Åa(s) は 加法的不確かさ (additive uncertainty) と
呼ばれる不確かさを表す伝達関数である。つまり,制御対象の真の伝達特性を PÅ(s) とし,
設計モデルの伝達関数を P (s) とすると,
PÅ(s) = P (s) + Åa(s) (6:26)
という関係が成り立つものとする。たとえば,柔軟ビーム振動制御問題を例にとると,設
計モデルで無視した高次振動モードの伝達特性を表しているのが Åa(s) と考えればよい。
スピルオーバ問題というのはこの不確かさ Åa(s) が原因となって引き起こされるものであ
るから,ロバスト安定化制御の実現はそのままスピルオーバが生じない制御系を意味する。
図6:9 のブロック線図を等価変換すると,図6:10 が得られる。
したがって,スモールゲイン定理から,
(a) K(s) が P (s) を安定化し,
(b) kÅaK=(1 + PK)k1 < 1
であるならば,フィードバック制御系がロバスト安定であることがいえる。ところで,(b)
の条件において,Åa(s) は高次の動特性であるか,もしくは実験などから数値データとし
て与えられ,このままでは設計が困難となる場合がある。そのときは,
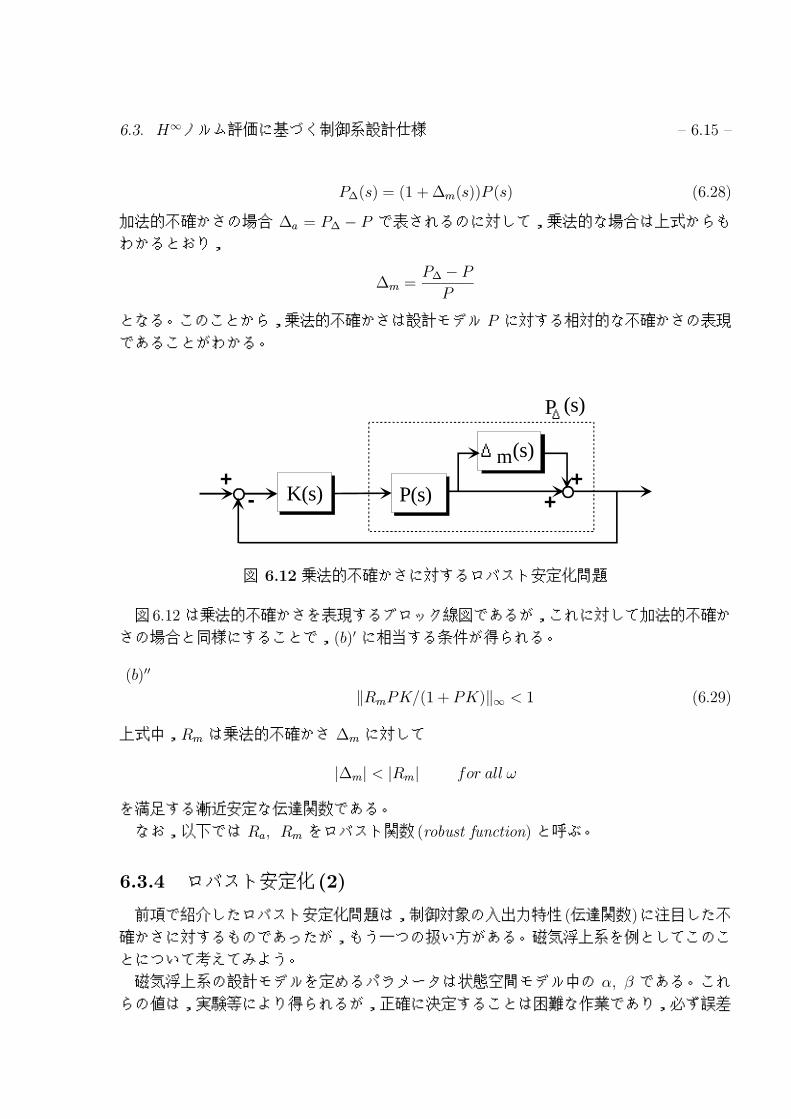
jÅaj < jRaj for all ! (6:27)
というゲイン条件 (図6:11) を満足する漸近安定な伝達関数 Ra(s) を利用して,
{ 6.14 { CHAPTER 6. ロバスト制御
P(s)
-K(s) ++
Δ (s)a
図 6.10 等価変換
(b)0 kRaK=(1 + PK)k1 < 1
という (より保守的な)条件で代用すればよい。
102 103-40
-20
0
20
40
Freq.[rad/s]
|Ra(s)|
∆a(s)| |Gain[dB]
図 6.11 加法的不確かさに対するロバスト関数
上式は,設計モデルの不確かさが大きい周波数帯域,すなわち jRaj が大きい周波数帯域で
は,制御器 K(s) のゲインをその大きさに対応して低くすることでロバスト安定性が保証
されることを意味している。たとえば,スピルオーバが問題となる無視した振動モードの
周波数帯域では,制御器のゲインを積極的に低減することによって,高次振動モードを励
起しないようにすればよいことになる。この考えは,適当なローパスフィルタを利用する
ことで簡単に実現できるかもしれないが,不確かさに対してどの程度のゲインの低下が必
要なのかを定量的に明確にしている点で重要性がある。
以上では,不確かさの表現方法として加法的な場合を考えたが,乗法的な不確かさ (mul-
tipricative uncertainty) を考えることもできる。
6.3. H1ノルム評価に基づく制御系設計仕様 { 6.15 {
PÅ (s) = (1 + Åm(s))P (s) (6:28)
加法的不確かさの場合 Åa = PÅ Ä P で表されるのに対して,乗法的な場合は上式からも
わかるとおり,
Åm =PÅ Ä PP
となる。このことから,乗法的不確かさは設計モデル P に対する相対的な不確かさの表現
であることがわかる。
P(s)K(s)-+
+
PΔ(s)
Δ (s)m+
図 6.12 乗法的不確かさに対するロバスト安定化問題
図6:12 は乗法的不確かさを表現するブロック線図であるが,これに対して加法的不確か
さの場合と同様にすることで,(b)0 に相当する条件が得られる。
(b)00
kRmPK=(1 + PK)k1 < 1 (6:29)
上式中,Rm は乗法的不確かさ Åm に対して
jÅmj < jRmj for all !
を満足する漸近安定な伝達関数である。
なお,以下では Ra; Rm をロバスト関数 (robust function) と呼ぶ。
6.3.4 ロバスト安定化 (2)
前項で紹介したロバスト安定化問題は,制御対象の入出力特性 (伝達関数)に注目した不
確かさに対するものであったが,もう一つの扱い方がある。磁気浮上系を例としてこのこ
とについて考えてみよう。
磁気浮上系の設計モデルを定めるパラメータは状態空間モデル中の ã; åである。これ
らの値は,実験等により得られるが,正確に決定することは困難な作業であり,必ず誤差

{ 6.16 { CHAPTER 6. ロバスト制御
を伴う。また,平衡点の移動や経年変化などにより値が変動するかもしれない。つまり,
ãreal; åreal を真の値とし,ãn; ån を設計に使用する値であるとすると,
ãreal = ãn +éã(t)
åreal = ån +éå(t)
なお,éã(t); éå(t) のそれぞれの変動幅は見積もることが可能であるとする。すなわち,jéãj îéãmax; jéåj î éåmax であり,éãmax; éåmax は既知とする。このとき,真の値を用いた状態
方程式は次式のように表される。
_x =
0@24 0 1
ãn 0
35+ ÅA
1Ax+
0@24 0
ån
35+ Åb
1Auここで,
ÅA =
24 0 0
éã(t) 0
35Åb =
24 0
éå(t)
35この場合,行列 A; b のどの部分にどの程度の大きさの不確かさがあるのかという情報を
ÅA; Åb がもつ。この意味で,このような不確かさを構造的不確かさ (structured uncertainty)
と呼ぶ。一方,前項で述べた入出力特性に基づく不確かさを非構造的不確かさ (unstructured
uncertainty) と呼ぶ。
構造的不確かさをもつ系の一般的な形を次式に示す。
_x = (An + ÅA(t))x+ (Bn + ÅB(t))u
y = (Cn + ÅC(t))x(6:30)
ここで,(An; Bn; Cn) が設計モデルを,(ÅA(t);ÅB(t);ÅC(t)) がそれぞれの不確かさを意
味する。時変の不確かさを与えているところに注意してほしい。
上式における設計モデル (An; Bn; Cn) と不確かさの構造 (不確かさの場所と大きさ) に基
づいて,不確かさの存在に対しても漸近安定性を保証する制御器の設計問題が 構造的不確か
さに対するロバスト安定化問題 である。本問題は,2次安定化 (quadratically stabilization)
制御問題の立場から議論されている [2]。ここで 2次安定化制御について簡単に触れておく。
もし,適当な n次正定行列 P > 0 に対して関数
V (x) = xTPx (6:31)
を考えたときに,その時間微分が不確かさに依存せずに
_V î Äãkxk2 (6:32)

6.3. H1ノルム評価に基づく制御系設計仕様 { 6.17 {
となる定数 ã> 0 が存在するとき,系が 2次安定であるという。ここで,kxk はベクトル
x のノルムを意味する。また,ある制御器を用いて構成したフィードバック制御系が 2次
安定であるならば,その制御器を 2次安定化制御器と呼ぶ。式 (6:31) は系内にあるエネル
ギに相当すると考えられるので,もし,式 (6:32) を満足する ãが存在すれば,系内のエネ
ルギは不確かさに依存せずに 0 に向かうことが保証される。いま,正定行列 P の最大固
有値と最小固有値をそれぞれ c1; c2 とすると,式 (6:31) より
c1kxk2 î V (x) î c2kxk2
を得る。これと式 (6:32) より
_V î Äãkxk2 î Ä(ã=c2)V (x)
から
V (x) î V (x(0))eÄ(ã=c2)t
を得る。この式は
kx(t)k îsc2
c1kx(0)keÄ(ã=2c2)t (6:33)
であることを意味している。これより,定数 ãは状態量の大きさ kxk の減衰度を表して
いることがわかる。
構造的不確かさは,不確かさに対する情報が構造という意味でより詳しく手に入れるこ
とができる反面,柔軟ビーム振動系のように制御対象と設計モデルとの間に次数の変動が
あるような場合に適用できない。
6.3.5 混合感度問題
これまで述べてきた問題は,制御性能に関するもの (6:3:1; 6:3:2) とロバスト安定性に関
するもの (6:3:3; 6:3:4) に大別できるが,通常の制御問題では,設計モデルに不確かさが存
在する中での制御性能の改善が要求される。したがって,上述の問題を単独で用いるより
はむしろ混合させることが実際の要求に即した問題といえる。これらにはいくつかの組み
合わせが考えられるが,その代表的なものを挙げておく。
(1) 感度問題+乗法的不確かさに対するロバスト安定化問題
乗法的不確かさに対するロバスト安定化に関連した閉ループ伝達関数 T = PK=(1+PK)
と感度関数 S との間には次式に示す関係がある。
S + T = 1 (6:34)

{ 6.18 { CHAPTER 6. ロバスト制御
このため,T のことを 相補感度関数 (complementary sensitivity function) という。上式は
重要な関係を意味している。それは,制御性能とロバスト安定性との間のトレードオフで
ある。つまり,制御性能を高めたい (jSj ú 1) 周波数帯域では,T ô 1 となるが,これは
不確かさを許容できないことを意味する。逆に,不確かさが大きい (jT j ú 1) 周波数帯域
では,感度S の低減ができない。言い替えると,性能を高めたい帯域の設計モデルはでき
るだけ正確に求める必要があることになる。たとえば柔軟ビーム振動制御問題では,少な
くとも性能を改善したい振動モードまでは正しくモデリングしなければならない (この場合
は,正しくパラメータ同定しなければならない) ことを意味する。
幸いなことに,一般の制御問題において,性能を改善したい周波数帯域は低周波数,設
計モデルの不確かさが多い帯域は高周波数である場合が多いので,これらのトレードオフ
を適切な周波数重みを利用することで考慮することができる。
10-1 10 0 101 102 103-40
-20
0
20
40
Freq.[rad/s]
WS| |-1WT| |-1
|S| |T|
γ γ
Gain[dB]
図 6.13 混合感度問題
つまり,
çççççç24 WSS
WTT
35çççççç1< ç (6:35)
このノルム条件を満足する制御器を設計することができれば,H1ノルムの性質から
kWSSk1 < ç; kWTTk1 < ç (6:36)
となり,制御性能ならびにロバスト安定性をともに満足する制御器を得ることができる。
このような制御問題のことを 混合感度問題 (mixed sensitivity problem) という。

6.4. H1標準問題とその解法 { 6.19 {
6.4 H1標準問題とその解法
前節では H1ノルムを評価関数とすることにより,様々な問題に対する設計仕様が表現
できることを見てきた。いずれの評価関数もできるだけ小さくなることが望ましい設計を
意味する。本節では,これらの設計問題の骨格となる H1制御問題を定義し,それに対す
る解を与える。
6.4.1 H1制御問題
G(s)
K(s)
w z
yu
図 6.14 一般化制御問題
図6:14 に示すブロック線図を考える。図中の記号ならびに各次元は以下に示すとおりで
ある。
w: 外生信号 (2 Rnw)
外乱や目標値など制御器が出力する以外の信号。
u: 操作量 (2 Rnu)
制御器が出力する信号。
z: 制御量 (2 Rnz)
制御目的は,ある信号を小さくすることで表すことができ,それらをまとめたもの。
たとえば,トラッキング問題では誤差であり,外乱抑制問題では抑制の対象となる
出力。
y: 観測量 (2 Rny)
適当なセンサにより制御器が直接手に入れることのできる量。
G(s): 一般化制御対象 (2 R(s)(nz+ny)Ç(nw+nu))
一般化の意味については後述するが,H1制御問題における G(s) を設計モデル P (s)
と区別する意味で,以下このように呼ぶ。
{ 6.20 { CHAPTER 6. ロバスト制御
K(s): 制御器 (2 R(s)nuÇny)
一般の制御問題では,外乱と操作量の作用の仕方や観測できる量と制御したい量が異な
ることが多くある。したがって,上図はフィードバック制御系の一般的なフレームワーク
を与えているといえる。
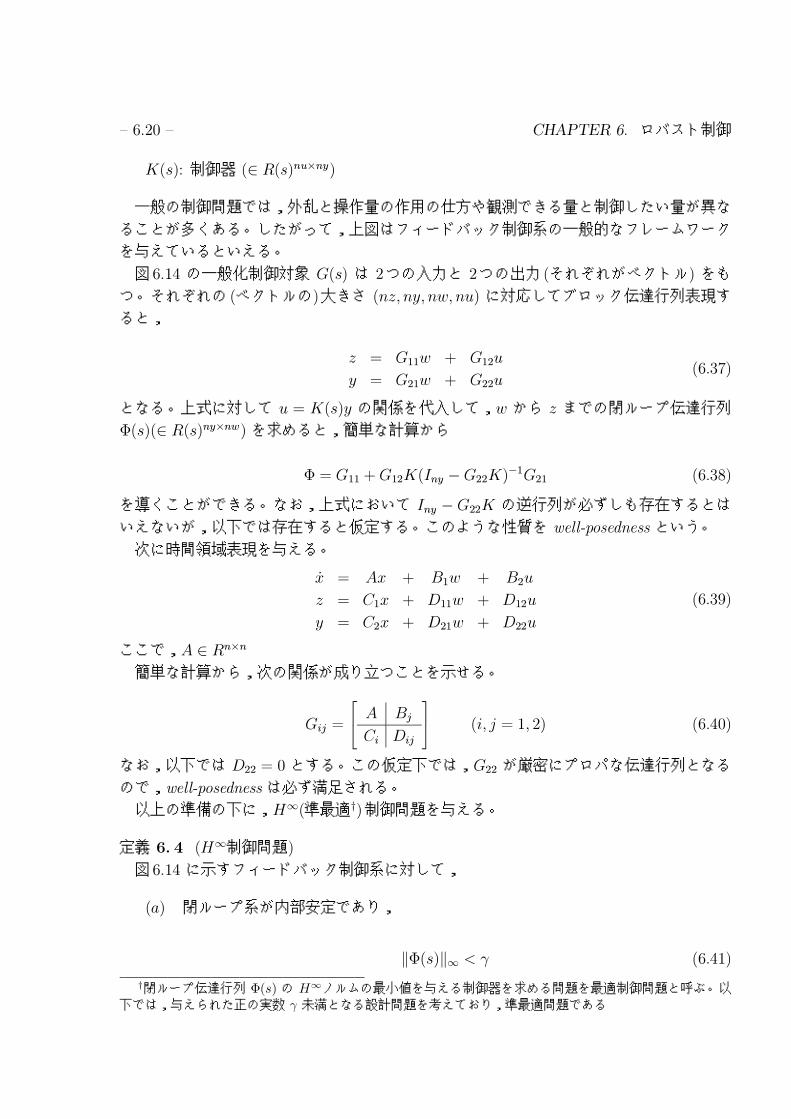
図6:14 の一般化制御対象 G(s) は 2つの入力と 2つの出力 (それぞれがベクトル) をも
つ。それぞれの (ベクトルの)大きさ (nz; ny; nw; nu) に対応してブロック伝達行列表現す
ると,
z = G11w + G12u
y = G21w + G22u(6:37)
となる。上式に対して u = K(s)y の関係を代入して,w から z までの閉ループ伝達行列
à(s)(2 R(s)nyÇnw) を求めると,簡単な計算から
à = G11 +G12K(Iny ÄG22K)Ä1G21 (6:38)
を導くことができる。なお,上式において Iny ÄG22K の逆行列が必ずしも存在するとは
いえないが,以下では存在すると仮定する。このような性質を well-posedness という。
次に時間領域表現を与える。
_x = Ax + B1w + B2u
z = C1x + D11w + D12u
y = C2x + D21w + D22u
(6:39)
ここで,A 2 RnÇn
簡単な計算から,次の関係が成り立つことを示せる。
Gij =
24 A Bj
Ci Dij
35 (i; j = 1; 2) (6:40)
なお,以下では D22 = 0 とする。この仮定下では,G22 が厳密にプロパな伝達行列となる
ので,well-posedness は必ず満足される。
以上の準備の下に,H1(準最適y)制御問題を与える。
定義 6. 4 (H1制御問題)
図6:14 に示すフィードバック制御系に対して,
(a) 閉ループ系が内部安定であり,
kà(s)k1 < ç (6:41)
y閉ループ伝達行列 à(s) の H1ノルムの最小値を与える制御器を求める問題を最適制御問題と呼ぶ。以
下では,与えられた正の実数 ç未満となる設計問題を考えており,準最適問題である
6.4. H1標準問題とその解法 { 6.21 {
を満足する制御器 K(s) が存在するかどうかを判定し,
(b) もし存在するならば,すべて見つけよ。
ここで çは,設計者が与える正の実数値である。
定義からもわかるとおり,H1制御問題では,制御器 K(s) が存在しない可能性がある。
線形制御理論に基づいて得られる制御器 (状態観測器+状態フィードバックの構造をもつ)
では,状態空間モデルが可制御性ならびに可観測性を満足していれば,必ず何らかの (安定
化)制御器を設計することができた (決して設計者のすべての要求を満たしているわけでは
ないが)。しかし,H1制御問題では,制御器は閉ループ系の内部安定性を保証するだけで
はなく H1ノルム条件も満足しなければならない。そのため,制御器が存在しないという
解があり得る。
6.4.2 H1標準問題の解法
この H1制御問題に対して,1988年に Glover & Doyle によって提案されたアルゴリズ
ム (G&Dアルゴリズム) を次に紹介する [3]。なお,このアルゴリズムは以下に示す仮定が
成り立つ一般化制御対象に対して制御器を計算するもので,このときの問題を特に H1標
準問題 (H1standard problem) と呼ぶ。
A1) (A;B2) が可安定,(C2; A) が可検出。
A2) D12 が列フルランク,D21 が行フルランクをもつ。
A3) 任意の ! に対して24 AÄ j!In B2
C1 D12
35 が列フルランク,24 AÄ j!In B1
C2 D21
35 が行フルランクをもつ。
これらの仮定の意味については次項で述べる。また,以降の表記を簡単にするため,
A4) D12 =
24 0
Inu
35 ; D21 = [0 Iny]
とし,この分割に対応して,D11 を次式のようにブロック行列表現する。
D11 =
24 D1111 D1112
D1121 D1122
35さらに,次の行列を定義する。

{ 6.22 { CHAPTER 6. ロバスト制御
R = DT1èD1èÄ
24 ç2Inw 0
0 0
35 ; ~R = Dè1DTè1 Ä
24 ç2Inz 0
0 0
35FI =
266424 F11
F12
35F2
3775 = ÄRÄ1[DT1èC1 +BTX1]
HI = [[H11 H12] H2] = Ä[B1DTè1 + Y1CT ] ~RÄ1
ここで,
D1è = [D11 D12]; Dè1 =
24 D11
D21
35であり,X1; Y1 は次に示す Riccati方程式の (安定化)解である。
X1 = Ric
8<:24 A 0
ÄCT1 C1 ÄAT
35Ä 24 B
ÄCTD1è
35RÄ1[DT1èC1; BT ]
9=;Y1 = Ric
8<:24 AT 0
ÄB1BT1 ÄA
35Ä 24 CT
ÄB1DTè1
35 ~RÄ1[Dè1BT1 ; C]
9=; (6:42)
最適レギュレータ問題の場合とは異なり,ハミルトン行列の (1; 2)ブロックならびに (2; 1)
ブロックは不定 (正定とも負定ともいえない) であるために安定化解の存在が必ずしも保証
されないことに注意してほしい。
定理 6. 2 (H1標準問題の解)
(a) 仮定 A1) ò A4) の下で,与えられた ç> 0 に対して H1標準問題の解
(H1制御器)が存在するための必要十分条件は,
(i) çïmax(õ[D1111;D1112]; õ[DT1111; D
T1121])
(ii) Riccati方程式 (6:42) の準正定解 X1 ï 0; Y1 ï 0 が存在し,
ö(X1Y1) < ç2
をともに満足することである。
(b) (a)の条件を満足するとき,H1制御器のすべては
K(s) = K11 +K12U (Iny ÄK22U)Ä1K21 (6:43)
で与えられる。上式において U(s) は制御器の自由度を表すパラメータで,
kUk1 < çを満足する漸近安定な伝達行列である。また,Kij は,次式で与えられる。
6.4. H1標準問題とその解法 { 6.23 {
24 K11(s) K12(s)
K21(s) K22(s)
35 =
2664 A B1 B2
C1 D11 D12
C2 D21 0
3775 (6:44)
ここで,
D11 = ÄD1121DT1111(ç2I ÄD1111D
T1111)Ä1D1112 ÄD1122
であり,D12; D21 は次式を満足する行列である。
D12DT12 = I ÄD1121(ç2I ÄD1111DT
1111)Ä1DT1121
DT21D21 = I ÄDT
1112(ç2I ÄD1111DT
1111)Ä1D1112
また,
B1 = ÄH2 + B2DÄ112 D11; B2 = (B2 +H12)D12
C1 = F2Z + D11DÄ121 C2; C2 = ÄD21(C2 + F12)Z
A = A+HIC + B2DÄ112 C1
ここで,Z = (I Ä Y1X1=ç2)Ä1
式 (6:38) と式 (6:43) を比較するとまったく同じ構造であることがわかる。したがって,
H1制御系は 図6:15 で示されるようなフィードバック構造をもつ。
また,定理からもわかるとおり, H1制御問題の解はただ一つではなく自由パラメータ
U(s) を用いた集合として与えられる。その集合の中には U(s) = 0 も含まれているが,そ
のときの解
Kc(s) = K11(s) =
24 A B1
C1 D11
35 (6:45)
を特に 中央解 (central solution) と呼ぶ。この中央解の次元が一般化制御対象のそれと一致
することに注意してほしい。これまでの応用例の多くは H1制御器として中央解が利用さ
れている。
çmin を達成する最適 H1制御器を解析的に得ることは一般にはできないが,çを次第に
小さくして上述のアルゴリズムを繰り返し適用することで,要求する精度で最小値 çmin 近
傍の H1制御器を得ることができる。
ところで,上述の設計アルゴリズムでは D22 = 0 としたが,その結果を利用して D22 6= 0
に対してH1制御器を得ることができる [4]。この場合,観測方程式は y = C2x+D21w+D22u
で与えられるが,観測量を ~y = yÄD22u = C2x+D21w と定義し直す。これに対して定理
中の設計アルゴリズムを適用する。いま,H1制御器が存在するものとし, ~K(s) で与えら
れたとすると,u = ~K(s)~y の関係より,観測量 y に対する H1制御器 K(s) は,
{ 6.24 { CHAPTER 6. ロバスト制御
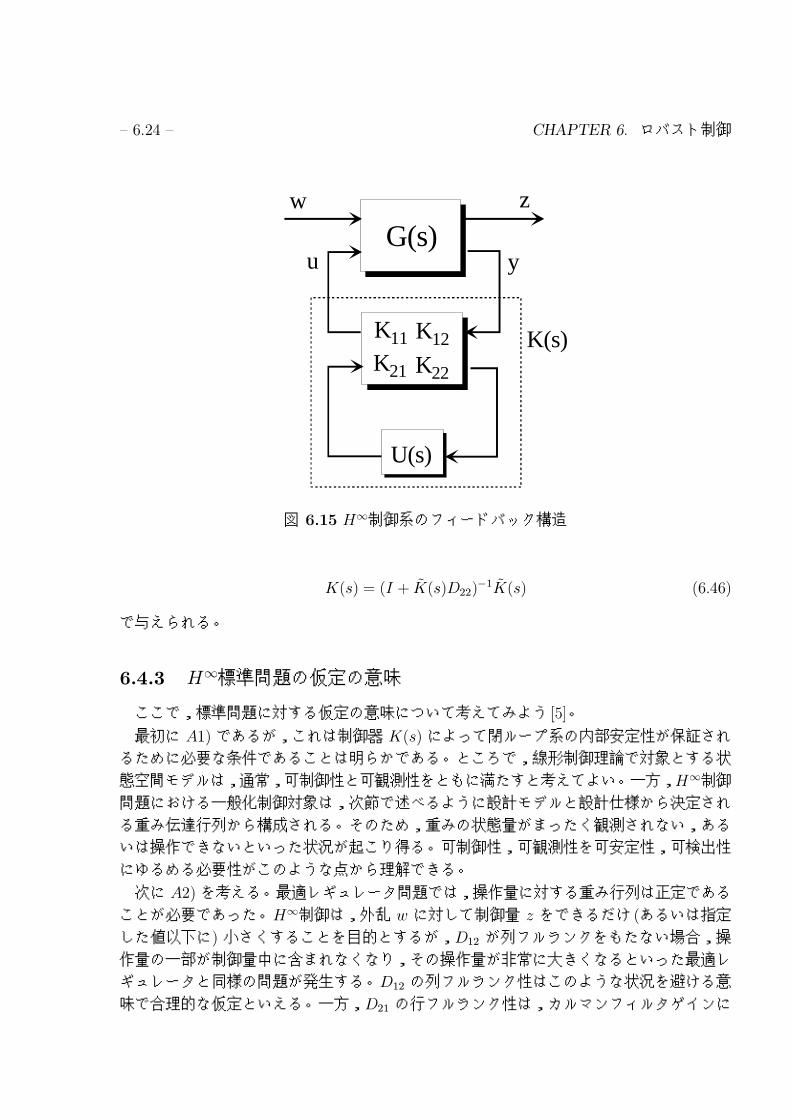
G(s)
U(s)
w z
K11 K12
K21 K22
K(s)
yu
図 6.15 H1制御系のフィードバック構造
K(s) = (I + ~K(s)D22)Ä1 ~K(s) (6:46)
で与えられる。
6.4.3 H1標準問題の仮定の意味
ここで,標準問題に対する仮定の意味について考えてみよう [5]。
最初に A1) であるが,これは制御器 K(s) によって閉ループ系の内部安定性が保証され
るために必要な条件であることは明らかである。ところで,線形制御理論で対象とする状
態空間モデルは,通常,可制御性と可観測性をともに満たすと考えてよい。一方,H1制御
問題における一般化制御対象は,次節で述べるように設計モデルと設計仕様から決定され
る重み伝達行列から構成される。そのため,重みの状態量がまったく観測されない,ある
いは操作できないといった状況が起こり得る。可制御性,可観測性を可安定性,可検出性
にゆるめる必要性がこのような点から理解できる。
次に A2) を考える。最適レギュレータ問題では,操作量に対する重み行列は正定である
ことが必要であった。H1制御は,外乱 w に対して制御量 z をできるだけ (あるいは指定
した値以下に) 小さくすることを目的とするが,D12 が列フルランクをもたない場合,操
作量の一部が制御量中に含まれなくなり,その操作量が非常に大きくなるといった最適レ
ギュレータと同様の問題が発生する。D12 の列フルランク性はこのような状況を避ける意
味で合理的な仮定といえる。一方,D21 の行フルランク性は,カルマンフィルタゲインに
6.4. H1標準問題とその解法 { 6.25 {
対応させて考えればよい。D21 は,外乱 w が観測量 y に及ぼす影響を表す行列である。し
たがって,これが行フルランクをもたない場合,外乱にまったく乱されない観測量がある
ことを意味しており,カルマンフィルタゲインが無限大となる。したがって,D21 の行フ
ルランク性も合理的な仮定といえる。
最後に A3) を考える。まず, 24 AÄ j!In B2
C1 D12
35の列フルランク性であるが,この条件は操作量 u から制御量 z までの伝達行列 G12 が虚
軸上に零点をもたない条件と等価である。H1制御問題の評価関数である H1ノルムは虚
軸上 (s = j!) で評価されるので,G12 が虚軸上に零点をもつ場合,その周波数の操作量
が評価関数中で考慮されないことになる。この条件は,このような状況を避ける意味をも
つ。もう一つの条件は,G21 が虚軸上に零点をもたない条件であり,同様に考えることが
できる。
6.4.4 H1特異問題
標準問題を満足しない一般化制御対象に対する設計問題をH1特異問題 (H1
singular problem)と呼ぶ。本項では,一般化制御対象を拡大することで対応する方法につ
いて述べる [4]。
たとえば,D12 がフル列ランクをもたないと仮定しよう。このとき,次の一般化制御対
象を考える (なお,簡単のために D11 = 0 とした)。
_x = Ax + B1w + B2u
ñz =
24 C1
0
35x +
24 D12
" ñD12
35uy = C2x + D21w
(6:47)
ここで," は正の実数であり, ñD12 を適当に選べば,行列 [DT12 "ñDT
12]T がフル列ランクを
もつようにできる。たとえば, ñD12 = I と選べばよい。このときの閉ループ伝達行列 ñà(s)
は,元の一般化制御対象に対する閉ループ伝達行列を à(s) としたときに
ñà(s) =
24 à(s)
à"(s)
35で与えられるので, çççñà(s)
ççç1< ç
を満足する H1制御器が得られれば,H1ノルムの性質から

{ 6.26 { CHAPTER 6. ロバスト制御
kà(s)k1 < ç
を満足することがわかる。なお," は十分に小さく選定すればよい。
D21 のフル行ランク条件を満たさない場合や仮定A3) を満たさない問題に対しても同様
の方法を適用することができる。
6.4.5 H1制御器の構造
定理 6. 2 で与えた H1制御器 (中央解) の構造を調べてみよう [6]。ここでは,議論を容
易にするために,次の条件を満足すると仮定する。
D11 = 0; DT12C1 = 0; B1D
T21 = 0 (6:48)
このとき,X1; Y1 に対する Riccati方程式は次式で与えられる。
ATX1 +X1A+X1(B1BT1 =ç
2 ÄB2BT2 )X1 + CT
1 C1 = 0
AY1 + Y1AT + Y1(CT1 C1=ç2 ÄCT
2 C2)Y1 +B1BT1 = 0
(6:49)
これらに対して,
T := (I Ä Y1X1=ç2)(= ZÄ1)
と定義した行列 T を利用して式変形を行うと次の関係式を得る。
A = TÄ1AT Ä (B1BT1 =ç
2 ÄB2BT2 )X1 Ä TÄ1B2BT
2 X1+TÄ1Y1CT
2 C2 + TÄ1Y1(CT1 C1=ç2 ÄCT
2 C2)T(6:50)
ところで,条件 (6:48) の下で中央解は,
A = A+ Y1(CT1 C1=ç2 ÄCT
2 C2)ÄB2BT2 X1T
Ä1
B1 = Y1CT2
C1 = ÄBT2 X1T
Ä1
で与えられるが,これを T を使って正則変換した後,式 (6:50) の関係を利用すると,
TÄ1AT = A+ (B1BT1 =ç
2 ÄB2BT2 )X1 Ä TÄ1Y1CT
2 C2
TÄ1B = TÄ1Y1CT2
CT = ÄBT2 X1
(6:51)
が得られる。したがって,中央解の状態空間表現は,
_xk = Axk +B1w +B2u+H(y ÄC2xk)
u = ÄKxk(6:52)
6.4. H1標準問題とその解法 { 6.27 {
ここで,
K = BT2 X1
H = TÄ1Y1CT2 = (Y Ä1
1 ÄX1=ç2)Ä1CT2
w = BT1 X1xk=ç
2
となる。上式は,H1制御器が全状態観測器+全状態フィードバックの構造をもつことを示
している。なお,式中の w は後述するように最悪外乱 (厳密には最悪外乱の推定値) を意
味しており,H1ノルムが最悪入力に対して定義されることから考えるとその合理性が理
解できる。
また,オブザーバゲイン H であるが,Y1 だけではなく,X1 にも関連していることに
注意してほしい。通常の状態観測器の設計では,状態フィードバックゲインの設計とは独
立にオブザーバゲインが設計されるが,H1制御問題ではノルム条件を満足することが要
求されるために,状態フィードバックゲインとオブザーバゲインを独立に選ぶことはでき
ない。もし,ç!1 とすると,ノルムに関する制約がなくなるため,たんに安定化制御器
を見つける問題となるが,この場合,H = Y1CT2 となり,LQGレギュレータと等価とな
る。この意味で,H1制御問題は LQGレギュレータ問題を含んでいるといえる。
最後に,w が最悪外乱 (の推定値) であることを示そう。そのために xTX1x を時間に関
して微分する。
ddt (xTX1x) = _xTX1x+ xTX1 _x
= xT (ATX1 +X1A)x+ wTBT1 X1x+ uTBT
2 X1x
+xTX1B1w + xTX1B2u
= xT (ÄX1B1BT1 X1=ç
2 +X1B2BT2 X1 ÄCT
1 C1)x
+wTBT1 X1x+ uTBT
2 X1x+ xTX1B1w + xTX1B2u
= ç2wTw Ä (w ÄBT1 X1x=ç
2)T (w ÄBT1 X1x=ç
2)
ÄuTu+ (u+BT2 X1x)T (u+BT
2 X1x)Ä xTCT1 C1x
上式を積分すると,Z 10
ddt (xTX1x) dt = xT (1)X1x(1)Ä xT (0)X1x(0)
= ç2kwk22 Äkzk2
2 Ä kw ÄBT1 X1x=ç
2k22
+ku+BT2 X1xk2
2
である。なお,式変形の際に,仮定 A4) による
zT z = (C1x+D12u)T (C1x+D12u) = xTCT1 C1x+ uTu
の関係を使用している。
初期状態 x(0) を 0 とし,閉ループ系が漸近安定であるとすると,
{ 6.28 { CHAPTER 6. ロバスト制御
kzk22 Äç2kwk2
2 = ku+BT2 X1xk2
2 Ä kw ÄBT1 X1x=ç
2k22
= ku+Kxk22 Äkw Äwworstk22
(6:53)
を得る。H1制御問題は,入力外乱 w の L2 ノルムに対して出力 z の L2 ノルムを低減す
ることが制御目的であるが,その意味で上式から w = wworst は最悪外乱であり,u = ÄKxが最適操作量であることがわかる。そして,これを実現するために,H1制御器は最悪外
乱に基づく全状態観測器を内部にもつ構造となっている。
6.5 H1制御問題への帰着
それでは,6:3 節で述べた様々な制御問題が H1制御問題にどのように帰着できるのか
を明らかにしよう。以下では,設計モデル P は厳密にプロパ,すなわち
P =
24 A B
C 0
35と仮定する。
6.5.1 感度問題
感度問題に対する H1ノルム評価 (6:22) に対して,çççç W
1 + PK
çççç1
=çççW ÄWPK(1 + PK)Ä1
ççç1
のように変形すると,一般化制御対象に対する式 (6:38) と見比べて次の関係にあることが
わかる。
G11 = W; G12 = ÄWP; G21 = 1; G22 = ÄP (6:54)
つまり感度問題は,一般化制御対象
G =
24 W ÄWP
1 ÄP
35 (6:55)
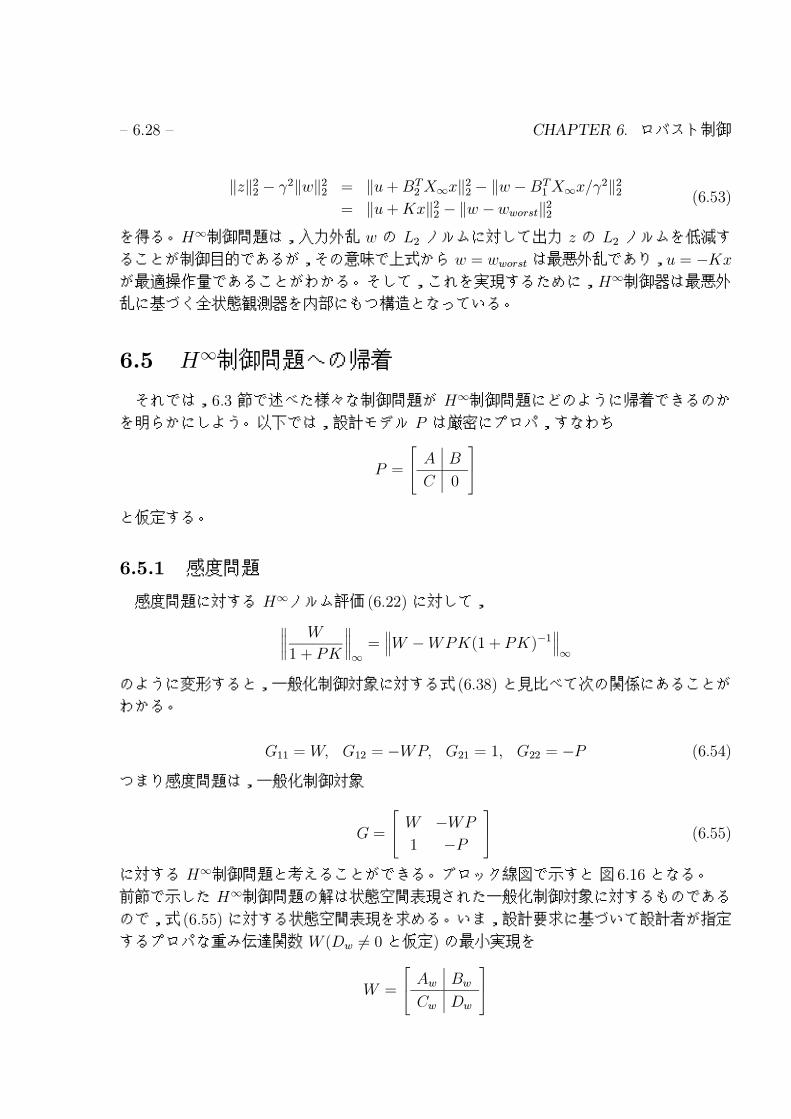
に対する H1制御問題と考えることができる。ブロック線図で示すと 図6:16 となる。
前節で示した H1制御問題の解は状態空間表現された一般化制御対象に対するものである
ので,式 (6:55) に対する状態空間表現を求める。いま,設計要求に基づいて設計者が指定
するプロパな重み伝達関数 W (Dw 6= 0 と仮定) の最小実現を
W =
24 Aw Bw
Cw Dw
35
6.5. H1制御問題への帰着 { 6.29 {
P(s)
K(s)
W(s)
+-
w z
yu
+
G(s)
図 6.16 感度問題に対する一般化制御対象
とすると,
G(s) =
2666664Aw BwC Bw 0
0 A 0 ÄBCw DwC Dw 0
0 C 1 0
3777775 (6:56)
が得られる。このことを示そう。設計モデル P (s) の状態量を x,重み W (s) の状態量を
xw とする。このとき,
_x = Ax+Bñu
ñy = Cx;
_xw = Awxw +Bwuwñyw = Cwxw +Dwuw
であるが,uw = ñy + w; ñu = Äu; y = ñy + w; z = yw であることから,
_xw = Awxw +BwCx+Bww
_x = AxÄBuz = Cwxw +DwCx+Dww
y = Cx+ w
を得る。これをまとめたのが式 (6:56) である。
ここで注意してほしいのは,設計仕様を与える重み W が G(s) 中に組み込まれている
という点である。G(s) が一般化制御対象と呼ばれる背景がここにある。また,重み W (s)
の状態量 xw は明らかに観測量 y からは不可観測である。しかし,重みを漸近安定に選定
すれば,可検出性は保証される。これが,一般化制御対象に対して,可観測性ではなく可
検出性を要求している理由である。
ところで,式 (6:56) に対して,標準問題の仮定を当てはめてみると,D12 = 0 であり,仮
定 A2) のランク条件が満たされないので,G&D アルゴリズムを本問題に対して直接適用
{ 6.30 { CHAPTER 6. ロバスト制御
することはできない。これは,感度問題が制御系の性能だけを意識した問題であり,操作
量に関する配慮がなされていないためである。なお,他の仮定は,重み W を漸近安定に
選び,設計モデル P が虚軸上に極ならびに零点をもたなければ満足される。
6.5.2 準感度問題
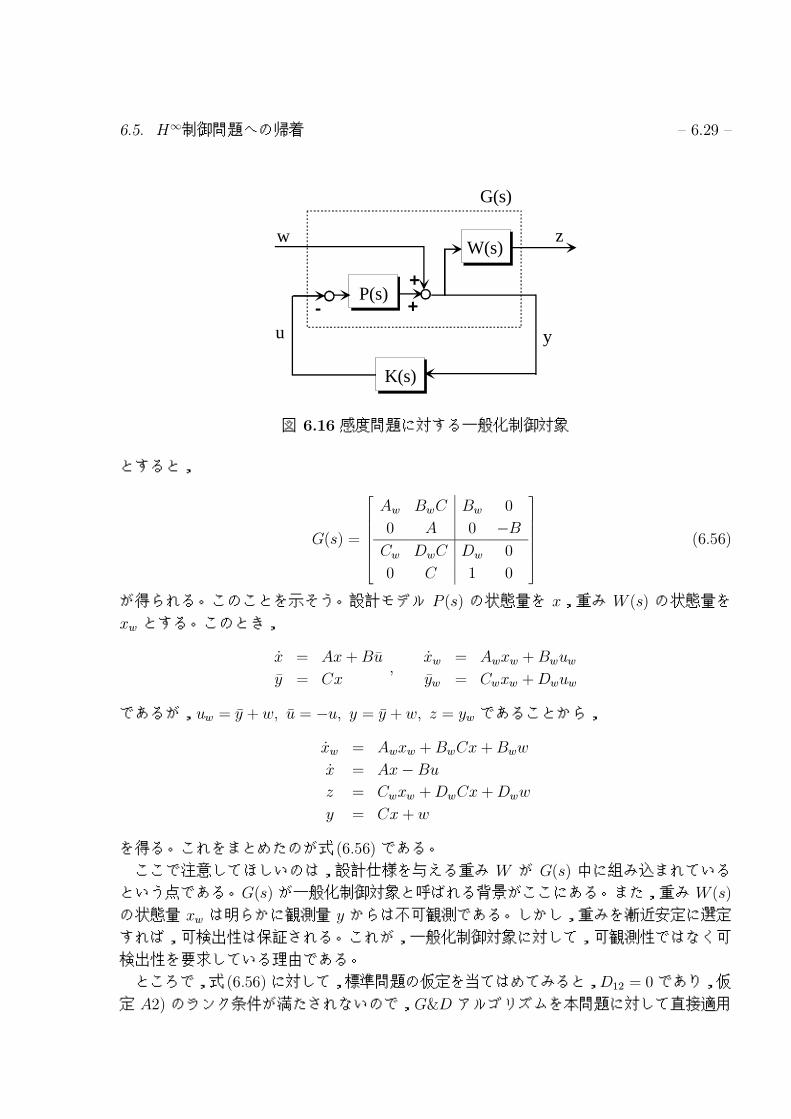
次に準感度問題の場合を考える。この問題に対応する H1制御問題は,
G11 = WP; G12 = ÄWP; G21 = P; G22 = ÄP (6:57)
で与えられ (図6:17 参照),
P(s)
K(s)
W(s)
+-
w z
yu
G(s)
図 6.17 準感度問題に対する一般化制御対象
感度問題と同じ設定の下で一般化制御対象に対する状態空間表現を求めると次式を得る。
G(s) =
2666664Aw BwC 0 0
0 A B ÄBCw DwC 0 0
0 C 0 0
3777775 (6:58)
D12 = 0; D21 = 0 であるので,感度問題のときと同じように,この問題に対しても仮定
A2) のランク条件は満足しない。
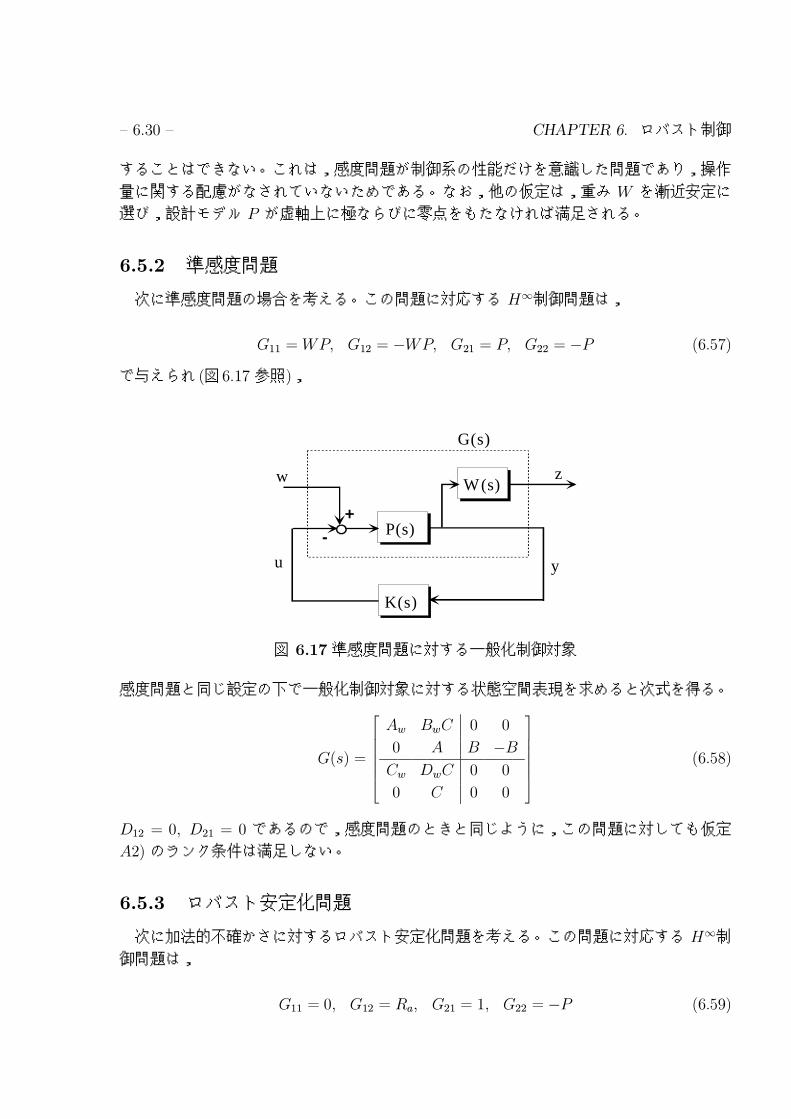
6.5.3 ロバスト安定化問題
次に加法的不確かさに対するロバスト安定化問題を考える。この問題に対応する H1制
御問題は,
G11 = 0; G12 = Ra; G21 = 1; G22 = ÄP (6:59)
6.5. H1制御問題への帰着 { 6.31 {
P(s)
K(s)
Ra(s)
+-
wz
yu
+
G(s)
図 6.18 ロバスト安定化問題 (加法的不確かさ)に対する一般化制御対象
で与えられる (図 6:18 参照)。
これに対してロバスト関数 Ra(s) の最小実現を
Ra(s) =
24 Ar Br
Cr Dr
35 (6:60)
とすると,本問題の一般化制御対象に対する状態空間表現は次式のようになる。
G(s) =
2666664Ar 0 0 Br
0 A 0 B
Cr 0 0 Dr
0 ÄC 1 0
3777775 (6:61)
この場合,ロバスト関数 Ra(s) が漸近安定かつ Dr 6= 0 に選ばれ,設計モデル P が虚軸上
に極をもたなければ標準問題に対する仮定がすべて満足される。
乗法的不確かさに対しては,対応する H1制御問題は
G11 = 0; G12 = RmP; G21 = 1; G22 = ÄP (6:62)
で与えられる (図 6:19)が,設計モデル P が厳密にプロパであるため,Rm をプロパに選ぶ
限り D12 の列フルランク条件を満たさない。そこで,Rm を D12 6= 0 の条件を満足するよ
うに P の次数差y の次数をもつ多項式に選ぶとする。この場合 RmP はプロパとなる (7:6
節の計算例で具体例を示す)。その状態空間実現を
RmP =
24 A B
CT DT
35 (6:63)
y(分母多項式の次数)-(分子多項式の次数)

{ 6.32 { CHAPTER 6. ロバスト制御
とする (DT 6= 0)と,一般化制御対象に対する状態空間表現は次式で与えられる。
G(s) =
2664 A 0 B
CT 0 DT
ÄC 1 0
3775 (6:64)
この場合,RmP が虚軸上に零点を,また設計モデル P が虚軸上に極をもたなければ仮定
がすべて満たされる。
P(s)
K(s)
-Rm(s)
-
w
z
yu
+
G(s)
+
図 6.19 ロバスト安定化問題 (乗法的不確かさ)に対する一般化制御対象
もし Rm がプロパでない伝達関数として与えられる場合,Rm の分母多項式の分,式
(6:64) 中の行列 A が拡大される。
6.5.4 構造的不確かさに対するロバスト安定化問題
式 (6:30) における構造的不確かさ ÅA; ÅB; ÅC が既知の定数行列 DÅ; EÅならびに時変
行列 FÅ(t) を用いて
ÅA = DaFa(t)EaÅB = DbFb(t)Eb
ÅC = DcFc(t)Ec
で表されるとする。なお,FÅ(t) は次式を満足するものとする。
F TÅFÅ< I (Å= a; b; c)
このとき,式 (6:30) は次式に変形できる。

6.5. H1制御問題への帰着 { 6.33 {
_x = Ax + [Da Db 0]w + Bu
z =
2664 Ea0
Ec
3775x +
2664 0
Eb0
3775uy = Cx + [0 0 Dc]w
(6:65)
ここで,w = diagfFa(t); Fb(t); Fc(t)gz。上式は一般化制御対象の構造をもつが,これに対して,(1) 閉ループ系を内部安定とし,(2)
w から z までの閉ループ伝達関数の H1ノルムが 1未満となる制御器が得られれば それ
は 2次安定化制御器である [7]。
6.5.5 混合感度問題
感度問題とロバスト安定化問題 (ここでは乗法的不確かさに対する問題) を混合したのが
本問題であり,これまでの結果を利用することで H1制御問題との対応関係を簡単に導く
ことができる (図 6:20 参照)。
G11 =
24 WS
0
35 ;G12 =
24 ÄWSP
WTP
35 ; G21 = 1; G22 = ÄP (6:66)
P(s)
K(s)
-W (s)
-
w
yu
+
G(s)
+
T
W (s)Sz1
z2
図 6.20 混合感度問題に対する一般化制御対象
乗法的不確かさの場合と同様の理由から,WTP がプロパとなるように重み WT を多項
式に選ぶとし,その最小実現を
WTP =
24 A B
CT DT
35 (6:67)
{ 6.34 { CHAPTER 6. ロバスト制御
とする (DT 6= 0) と,一般化制御対象に対する状態空間実現は次式で与えられる。
G(s) =
2666666664AS BSC BS 0
0 A 0 ÄBCS DSC DS 0
0 ÄCT 0 DT
0 C 1 0
3777777775 (6:68)
ここで,
WS =
24 AS BS
CS DS
35この場合,設計モデル P が虚軸上に極を,WTP が虚軸上に零点をもたず,重み WS が漸
近安定に選定されれば,標準問題に対する仮定をすべて満足する。
6.6 計算例
それでは磁気浮上系を例として,混合感度問題を適用して H1制御器を設計してみる。
混合感度法は,制御性能 (感度低減)とロバスト安定性におけるトレードオフを考慮する
ことのできる設計法であることはすでに述べたとおりであるが,通常,
(1) 要求する感度特性を保証した上で,不確かさの許容度を最大にする
(2) 設計モデルのもつ不確かさに対してロバスト安定性を確保した上で,制御性能を
できるだけ高める (感度関数のゲインをできるだけ低減する)
という 2通りの立場で設計が行われる。本節では,後者の立場で設計を行うものとする。
最初に設計仕様を定めよう。
(1) ロバスト安定性の観点から,50[Hz] 以上の周波数帯域で
は相補感度関数 T のゲインが Ä10[dB] 程度であり,かつ
Ä40[dB=dec] で減少すること。
(2) 感度関数 S のゲインをできるだけ低減すること。
磁気浮上系は不安定系であるために,どの周波数帯域にどの程度の不確かさが含まれて
いるのかを定量的に把握することは容易ではない。そのため,設計仕様 (1) を定めるにはあ
る程度の試行錯誤が必要となる。この条件を,相補感度関数 T に対するロバスト関数 WT
として表現した一例が次式である。
WT =s2 + 2ê!s+ !2
ç!2 (6:69)

6.6. 計算例 { 6.35 {
ここで ! = 9Å2ô; ê= 1; ç= 10 である。また,感度関数に対する重み WS として,次に
示す構造をもつ 1次の重みを選定する。
WS = ãs+ 75
s+ 10(6:70)
上式において,ãが感度をできるだけ低減する設計仕様 (2) を満たす目的で使用される調
整用パラメータである。
このとき,式 (6:67) の最小実現は
24 A B
CT DT
35 =
2664 0 1 0
2365 0 Ä9:694
0:1740 3:537Ç 10Ä3 Ä3:031Ç 10Ä4
3775 (6:71)
で与えられる。さらに,WS に対する最小実現24 AS BS
CS DS
35 =
24 Ä10 1
65ã ã
35 (6:72)
より,一般化制御対象の状態空間モデルが得られる。あとは,ãの上限値を試行錯誤 (ある
いは適当な数値探索プログラム) により決定すればよい。ここでは途中経過は省略するが,
上限値近傍の値として ã= 0:4 を得た。このときの中央解を次式に示す。
K(s) = Ä8:451Ç 106(s+ 48:63)(s+ 18:97)
(s+ 10:0)(s+ 285:1)(s+ 2782:)(6:73)
また,感度関数ならびに相補感度関数のゲイン特性を描いたのが,図 6:21 である。感度関
数が重み WÄ1S によって整形されていることがわかる。また,相補感度関数が jT j < jWÄ1
T jを満たしており,ロバスト安定性に対する設計仕様 (1) が満たされている。
ところで,実際の電磁石へ供給する電流は,制御用電流だけではなく平衡電流を足し合
わせたものを与える必要がある。平衡位置に対する平衡電流を正確に得ることができるな
らば,上で設計した制御器により希望する平衡位置で安定浮上を実現できる。しかし,平衡
電流が一定誤差を含む場合には,それを補償する制御器が要求される。具体的には,積分
特性を持たせることが必要である。制御器の積分特性は,感度関数に対する重みに積分器
を含ませることで実現できるが,そうすると標準問題に対する仮定 A3) が満たされない。
ここでは自由パラメータ U(s) を利用して制御器に積分特性を持たせる方法を紹介する [8]。
定理 7:3 より,H1制御器が存在するならば,そのすべては
K(s) = K11 +K12U (I ÄK22U)Ä1K21
で与えられる。いま,
U(0) = KÄ122 (0)(= Ä(C2A
Ä1B2)Ä1) (6:74)

{ 6.36 { CHAPTER 6. ロバスト制御
100 101 102 103 104-40
-20
0
20
40
Freq.[rad/s]
WT| |-1γ
WS| |-1γ
|S| |T|
Gain[dB]
図 6.21 感度関数ならびに相補感度関数のゲイン特性
と選んだとしよう。このとき I ÄK22(0)U(0) = 0 であることから,K(0) =1 となり制御
器が積分器をもつことになる。もし,自由パラメータを定数 KÄ122 (0) とすれば,制御器の
次数を上げることなく積分特性を持たせることが可能である。なお,自由パラメータに対
するノルム条件から kKÄ122 (0)k1 < 1 であることが必要であるが,実用上はほとんどの場
合この条件を満足すると考えてよい。
磁気浮上の例の場合 U = Ä0:9992 となり,このときの制御器を次式に示すが,積分器を
1つもつことがわかる。
K(s) = Ä3:021Ç 103(s+ 48:63)(s+ 17:34)(s+ 3:687)
s(s+ 10)(s+ 274:0)(6:75)
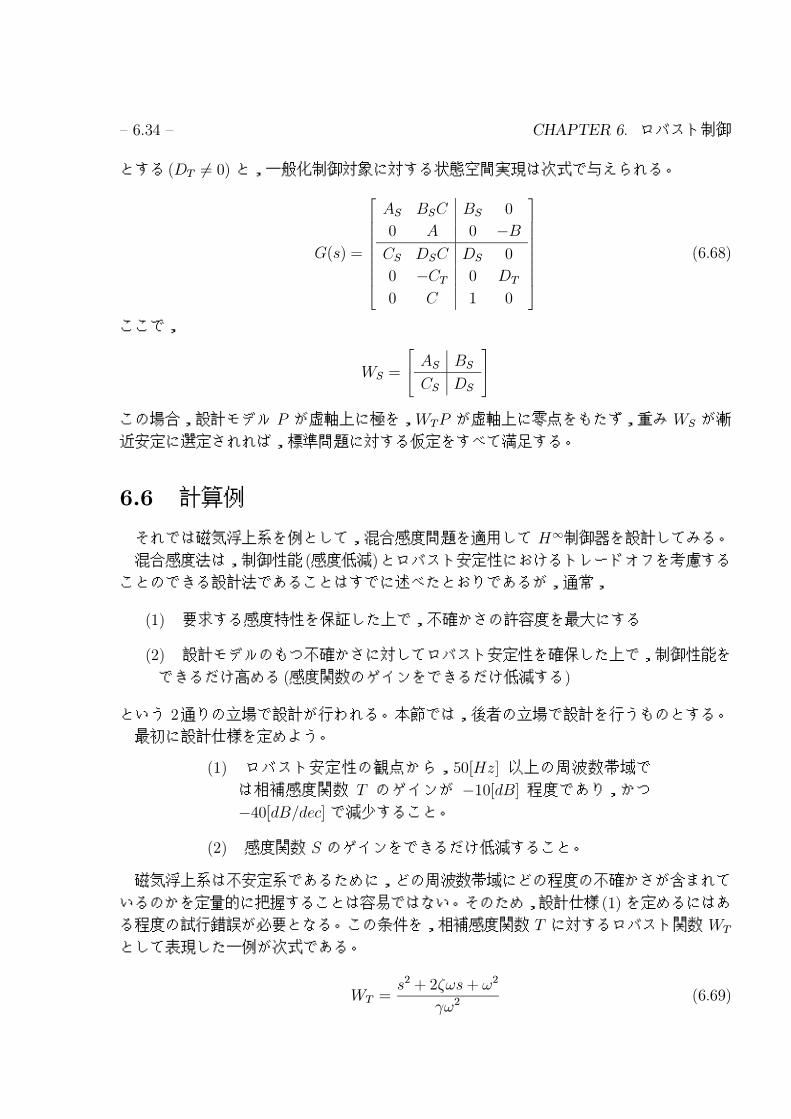
このときの,感度関数ならびに相補感度関数のゲイン特性を図 6:22 に示す。また,ステッ
プ入力に対する応答を描いたのが図 6:23 であるが,定常偏差なく追従していることがわ
かる。
参 考 文 献 { 6.37 {
100 101 102 103 104-40
-20
0
20
40
Freq.[rad/s]
WT| |-1γ
WS| |-1γ
|S| |T|
Gain[dB]
図 6.22 制御器に積分特性をもたせた場合のゲイン特性
参 考 文 献
[1] 木村英紀:LQG から H1へ,計測と制御,29, 2, pp.111/119 (1990)
[2] 木村,藤井,森: ロバスト制御, コロナ社 (1994)
[3] K.Glover and J.C.Doyle: State-space formulae for all stabilizing controllers that satisfy
an H1-norm bound and relations to risk sensitivity, Systems & Control Letters, 11,
pp.167/172 (1988)
[4] 美多 勉: H1 制御, 昭晃堂 (1994)
[5] 佐伯 正美: H1制御と LQG 制御の関係, 第41回システム制御情報講習会「H1制御
の基礎」, pp.73/84 (1992)
[6] 川谷,藤井,木村:H1制御系における外乱推定の役割,計測自動制御学会論文集,27,
9, pp.990/995 (1991)
[7] 大須賀,小野: 不確実システムの出力フィードバックによるロバスト安定化-H1制
御問題からのアプローチ-, 計測自動制御学会論文集, 25, 12, pp.1379/1381 (1989)
[8] 杉江 俊治: 状態空間法による H1 制御と制御系設計, 第41回システム制御情報講習
会「H1制御の基礎」, pp.49/71 (1992)
[9] 特集:実用期を迎えたロバスト制御, 計測と制御, 30, 8 (1991)

{ 6.38 { 参 考 文 献
0 0.1 0.2 0.3 0.4 0.50
1
2
Time[sec]
Disp.[mm]
図 6.23 ステップ応答
[10] 細江,荒木: 制御系設計-H1制御とその応用, 朝倉書店 (1994)
[11] 前田,杉江: アドバンスト制御のためのシステム制御理論, 朝倉書店 (1992)
[12] 藤井監訳: フィードバック制御の理論-ロバスト制御の基礎理論-,コロナ社 (1996)






![ACサーボモータ・アンプ - Global home | Industrial … [位置制御モードの接続と設定] ページ 位置制御モード時の制御ブロック図 66 位置制御モード時の制御ブロック図](https://static.fdocument.pub/doc/165x107/5ac41e8d7f8b9ae06c8cfee2/ac-global-home-industrial-.jpg)











