第三章 基本概念 -...
25
12 第三章 第三章 第三章 第三章 基本概念 基本概念 基本概念 基本概念 3.1 LS-DYNA FEMB HYPERMESH ANSYS FEMAP PATRAN CAD LS-DYNA K ASCII LS-DYNA *KEYWORD *END * $
Transcript of 第三章 基本概念 -...

12
第三章第三章第三章第三章 基本概念基本概念基本概念基本概念
3.1关键字文件关键字文件关键字文件关键字文件
LS-DYNA是求解器,支持它的前处理器很多,如:FEMB、HYPERMESH 、ANSYS、FEMAP、PATRAN等,通过这些前处理器,把 CAD模型转化为节点和单元这样的有限元模型,再施加边界条件、约束和载荷,最后输出一个 LS-DYNA的递交文件,称之为关键字文件或 K文件,为 ASCII格式。不论使用哪种前处理器处理 LS-DYNA的有限元建模,最终都是转化为关键字文件方式,关键字文件是由一系列的关键字组成的,典型的关键字文件如下所示:
关键字文件以*KEYWORD关键字开始,以*END关键字文件结束。数据块以关键字开始并以下一个关键字结束,关键字必须被正确输入,以“*”符号开始。若第一列是“$”字符,表示该行为注释。允许定义同一关键字的多重数据块。材料由材料名关键字指定,接触

13
算法由接触类型关键字指定,文件的格式为半自由格式(可以是标准格式,也可以是自由格式,即数据与数据间以逗号隔开)。 关键字间的组织关系:
3.2 PART概念概念概念概念
PART是一种单元集,这些单元具有相同的材料,单元属性和单元类型,在物理概念上可以不相关,只要它们有相同的材料,单元属性和单元类型,就可以定义为一个 PART,另一方面,即使它们有相同的材料,单元属性和单元类型,也可以把他们定义为不同的 PART。 例如三个球撞击地面,如三个球的材料不同,则应分别定义为单个的 PART。
如果两球的材料一样,则可以把它们定义成一个 PART。
但如三个球的材料,单元属性等都一样,既可以把它们定义为一个 PART,也可以把它们定义成三个无关的 PART。
P
PART1 PART2 PART3
PART4
PART1 PART2 PART2
PART3

14
总之合理地定义 PART集,是由怎样方便的施加载荷、约束、边界条件和接触等来决定的。各种前处理器都可以很方便的对 PART进行修改属性等相关操作。
PART与单元之间的关系是由定义单元的关键字来实现的,每一个单元都有一个对应的PART ID号,由单元关键字的第 2列指定(参见上面关键字文件中的单元关键字)。单元、PART和单元属性关系如下图所示:
3.3 SET关键字的作用关键字的作用关键字的作用关键字的作用 对于有限元分析,施加各种载荷,边界条件,接触定义最基本的对象是节点,单元和PART。在 LS-DYNA中有一*SET关键字,可以对节点、单元和 PART等进行分组集合,方便处理有限元模型。如上面的例子,可以把三个球(PART1、PART2和 PART3)通过*SET_PART_LIST定义成一个 PART集合,对它施加初速度,而不必分别对每个 PART施加初速度。。。。*SET相关的关键字为:
3.4 接触问题接触问题接触问题接触问题 在有限元分析中,接触问题的处理往往是衡量有限元软件分析能力的一个重要指标,
PART1 PART2 PART3
PART4
csu
矩形

15
LS-DYNA 有 40 多种接触类型供用户选择,具有强大的接触分析能力。但为什么要有这么多的接触类型,一是由于有一些专门的接触类型用于专门应用,还有就是有一些老的接触类型一直保留,主要是为了使以前建立的有限元模型能一直使用。怎样选择合适的接触类型和定义接触参数对于初学者来说可能有一定的困难,希望通过本节的说明,使大家了解接触的原理,各种接触类型的不同和怎样选择接触类型和定义接触参数,其他的一些区别请参见第十章汽车碰撞仿真分析中的接触说明。
3.4.1主主主主((((master))))与从与从与从与从((((slave))))的概念的概念的概念的概念 在接触定义中有主面与从面的概念,一旦定义了一个接触对,程序检查从面的节点是否与主面的段(段的概念下面介绍)发生接触。如图所示:
从面考虑的是节点,所以对从面来说有限元模型是否是个连续体不是很重要,但对一些接触类型来说一般要求它的网格划分比主面更密。 主面上考虑的是段,可以是连续的网格也可以是不连续的网格。
3.4.2段段段段((((Segment))))的概念的概念的概念的概念 对于壳单元段由单元的 3 或 4 个节点组成,对于体单元段由单元一个面上的 3 或 4 个节点组成。
3.4.3接触算法接触算法接触算法接触算法
LS-DYNA处理接触问题一般采用三种不同的算法:
� 动力约束法
� 分配参数法
� 对称罚函数法(缺省的方法)
动力约束法动力约束法动力约束法动力约束法 动力约束法是最早采用的接触算法,1976 年最先用于 DYNA2D 程序,后来用于DYNA3D 程序。它的原理是:在每一时步修正构形前,检查从节点是否贯穿主表面,并调
从面从面从面从面
主面主面主面主面

16
整时间步大小,使那些贯穿从节点都不贯穿主表面,对所有已经和主表面接触的从节点施加约束条件,保持从节点与主表面接触,另外检查与主表面接触的从节点所属单元是否存在受拉界面力,如有则用释放条件使从节点脱离主表面。由于该算法比较复杂,目前仅用于固连接触,即只有约束条件,没有释放条件。
分配参数法分配参数法分配参数法分配参数法 该算法仅用于有相对滑动没有分离的滑动处理,如炸药爆炸的气体对结构的压力作用。其原理是:将每一个正在接触的从单元一半质量分配到被接触的主表面面积上,同时由每个从单元的内应力确定作用在接受质量的主表面面积上的分布压力。在完成质量和压力分配后,程序修正主表面的加速度,然后对从节点的加速度和速度施加约束,保证从节点沿主表面运动,程序不允许从节点穿透主表面,从而避免反弹,该方法主要用于滑动接触方式。
对称罚函数法对称罚函数法对称罚函数法对称罚函数法 对称罚函数法是 LS-DYNA 的缺省算法,1982 年开始用于 DYNA2D 程序,后扩充到DYNA3D 程序。其原理是:每一时步先检查各从节点是否穿透主表面,没有穿透则不对该从节点做任何处理。如果穿透,则在该从节点与主表面间,主节点与从表面间引入一个较大的界面接触力,大小与穿透深度、接触刚度成正比,称为罚函数值。其物理意义相当于在其中放置一系列法向弹簧,限制穿透。如下图所示:
接触力由下面公式计算:
δKF =
=K 接触界面刚度(接触界面刚度由单元尺寸和材料特性确定)
=δ 穿透量 该接触算法方法简单,很少激起网格的沙漏效应,没有噪声,动量守恒准确,不需要碰撞和释放条件,为 LS-DYNA的缺省算法。
3.4.4接触的分类接触的分类接触的分类接触的分类
k
δδδδ

17
LS-DYNA(960)有 40多种接触类型,可以大致分类如下:
3.4.5 单向与双向接触的区别单向与双向接触的区别单向与双向接触的区别单向与双向接触的区别:::: 单向的概念: 仅检查从节点对主面的穿透,计算效率高,使用单向接触的接触类型如下:
� NODES_TO_SURFACE
� AUTOMATIC_NODES_TO_SURFACE
� FORMING_NODES_TO_SURFACE 通常用于冲压成型分析 � CONSTRAINT_NODES_TO_SURFACE 现在已很少使用 � ERODING_NODES_TO_SURFACE
� ONE_WAY_SURFACE_TO_SURFACE
� ONE_WAY_AUTOMATIC_SURFACE_TO_SURFACE
但转换接触对的主从定义可能得到不同的结果,使用单向接触有时可能捕捉不到接触行为,如下图所示:
双向的概念: 与单向不同的是,既检查从节点对主面的穿透又检查主面节点对从面的穿透,即检查的对称性,这样对于主从表面的定义是任意的(不象单向那样需把网格较粗的定义为主面),这对用户提供了很大的方便性,代价是处理接触这方面的计算量将增加 2倍左右。 使用双向接触的接触类型如下:
� 单向 � 双向 � 单面 � 实体
� 固连 基于罚函数法 基于约束法,若关键字中包含_CONSTRAINT 固连约束法,若关键字中包含_TIED 或_TIEBREAK
从面 主面
f
t 从面 主面
f
t

18
� SURFACE_TO_SURFACE
� AUTOMATIC_SURFACE_TO_SURFACE
� FORMING_SURFACE_TO_SURFACE
� CONSTRAINT_SURFACE_TO_SURFACE
� ERODING_SURFACE_TO_SURFACE
3.4.6自动接触与非自动接触的区别自动接触与非自动接触的区别自动接触与非自动接触的区别自动接触与非自动接触的区别 大家注意到在接触定义的关键字中,不管是单向还是双向,有 AUTOMATIC 与非AUTOMATIC 的区别。自动接触是新开发的接触类型,主要是针对壳单元接触中的方向问题(体单元以接触面的外法线为接触方向,所以总可以产生接触)。若为非自动接触,接触只在壳单元的法线方向发生,若为自动接触则在壳单元的两侧都发生。
很多复杂情况下不可能保证壳单元法向与接触方向的正确一致,所以总是建议使用自动接触类型。
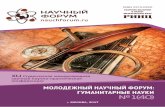
3.4.7 壳厚度与接触厚度的区别壳厚度与接触厚度的区别壳厚度与接触厚度的区别壳厚度与接触厚度的区别:::: 对于壳单元而言,需要定义壳的厚度,这是物理概念上的厚度,它的大小影响单元的质量和刚度。 同时在定义接触时,有接触厚度的概念如下图所示:
接触表面由壳单元进行厚度偏置得到,缺省状态下接触厚度等于壳单元厚度,通过调整相关参数可以缩放接触厚度(*CONTACT或*PART_CONTACT),但壳单元厚度在没有外力作用下是不变的。
壳下表面
壳上表面 从节点 接触力
壳下表面
壳上表面
从节点
从节点
接触力
壳单元厚度 接触厚度
映射的接触表面

19
对于所有的自动接触,厚度偏置总是激活,对于非自动接触,厚度偏置是可选的(由*CONTACT关键字中 SHLTHK参数控制。
壳单元有两种厚度偏置方式,一为基于节点,另一为基于段,如下图所示:
基于节点 基于段
3.4.8接触搜索方式接触搜索方式接触搜索方式接触搜索方式 在接触算法中,为了判定一个从节点是否发生接触,首先应当对它周围的主段进行搜索,发现最近的主段进行接触判定。LS-DYNA有两种接触搜索方式:
� 基于节点的增量搜索方式
� 基于段的 bucket分类搜索方式 基于节点的增量搜索方式基于节点的增量搜索方式基于节点的增量搜索方式基于节点的增量搜索方式 增量搜索方式是最早采用的方法,对每一个从节点,搜索最近的主节点,找到最近的主节点后,再搜索主节点周围最近的主段,检查若有渗透发生,施加接触力。该方法简单高效,如图所示:
所有的非自动接触方式都采用增量搜索方式所有的非自动接触方式都采用增量搜索方式所有的非自动接触方式都采用增量搜索方式所有的非自动接触方式都采用增量搜索方式,但该方法有不足的地方,就是要求主面的网格必须是连续的,对于不连续的的主面将会出现问题,如图,段 2和段 3将不会被搜索,而可能实际情况就是段 2或段 3与从节点发生接触。
tm
ts
中面中面中面中面 间隙间隙间隙间隙
主节点主节点主节点主节点
段 1 段 4 段 3
段 2
从节点从节点从节点从节点

20
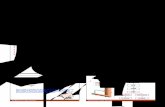
另外对于网格差别较大和形状复杂的主面来说,增量搜索方式可能会产生错误的接触行为,如图所示,搜索到的最近的主节点并不包含最近的主段。
基于段的基于段的基于段的基于段的 bucket分类搜索方式分类搜索方式分类搜索方式分类搜索方式 基于段的 bucket 分类搜索方式是新的接触搜索方式,主要是为了解决如上面提到的接触搜索问题。它的原理是对于每个从节点,搜索最近的主段,首先把接触空间划分成很多小的 bucket,对于每个从节点,按照它的空间位置指定于某个 bucket 中,然后在该范围内搜索最近的主段,运行一定的时间后(比如 100个时间循环),根据该节点空间位置的变化再重新指定新的 bucket。如图所示: 一维 bucket分类搜索分类搜索分类搜索分类搜索
比如在一维 bucket 分类方式下,图中的黑点代表接触段的质心点(通过该质心点定位主段),对于落入某 bucket的从节点而言,搜索该 bucket中的段,找到最近的主段,若没有找到,再搜索附近的 bucket,直到找到最近的主段。这种方法由于不断更新 bucket 分类,所以要耗费更多的 CPU时间。
同理在二维和三维 bucket分类搜索方式下搜索最近的主段。
二维 bucket分类搜索分类搜索分类搜索分类搜索::::
从节点
最近的主节点
最近的主段
从节点从节点从节点从节点 主节点主节点主节点主节点
段1 段 4 段 3
段 2

21
三维 bucket分类搜索分类搜索分类搜索分类搜索::::
如下图所示,若应用基于节点的增量搜索方式,找到最近的主节点,与该节点相联的主段是 1,2,3,但都不包含该从节点,所以接触搜索失效,但若使用基于段的 bucket分类搜索方式,可以很方便的找到包含该从节点的主段,建立接触关系。
总的来说,非自动接触类型采用基于节点的增量搜索,自动接触类型采用基于段的bucket分类搜索。所以总是建议使用自动接触类型。
最近的节点
从节点
Bucket搜索后得到包含该从节点的段

22
3.4.9滑动界面能滑动界面能滑动界面能滑动界面能((((sliding interface energy)))) 滑动界面能分两种情况:有摩擦和没有摩擦。 当没有摩擦时(即在接触中没有定义摩擦系数),滑动界面能为接触弹簧保持的势能(如图),但在碰撞过程中,能量的转换应该是接触弹簧的势能转化为动能,动能转化为变形能,所以在计算中滑动界面能是非物理的,应当控制在很小的值以内:
式中 f为接触弹簧力,p为渗透量,sie为滑动界面能。
在纯弹性碰撞中,滑动界面能应完全转化为动能(如图所示),若为弹塑性碰撞,即有应变能,则滑动界面能应完全转化为动能和应变能。
当有摩擦时,在滑动界面能中包含了摩擦能,此时除了在接触面的法向有滑动界面能,在切向也产生界面摩擦能。
LS-DYNA的接触摩擦基于库仑公式,摩擦系数由下式计算:
µc=µd +(µs-µd)e-(DC)(v)
µs = 静摩擦系数
µd = 动摩擦系数
DC= 指数衰减系数
v = 接触面间的相对速度

23
若 DC 或 v = 0则 sc µµ = 在库仑力作用下界面剪切应力在某些情况下会非常大,可能会超过材料的承受极限,所以要限制最大摩擦力,最大摩擦力可以由粘性摩擦系数 VC和接触段的面积来定义:
粘性摩擦系数常用于接触引起塑性流动的情况,推荐其值为 这里 0σ 表示接触材料的屈服应力。
对于滑动界面能常遇到的问题是出现负值,有两种情况会导致负的滑动界面能:
1.... 基于段的映射方式基于段的映射方式基于段的映射方式基于段的映射方式
2.... 初始渗透初始渗透初始渗透初始渗透
1. 基于段的映射方式基于段的映射方式基于段的映射方式基于段的映射方式:::: 如图所示:节点在两段的交界处检查不到渗透产生,所以会滑到接触厚度中去,此时程序发现有渗透节点存在,必定会给它施加一个接触力,把它拉回到接触面上,此时整个系统在对从节点做功,消耗它的接触势能(但此前没有得到动能的补充),所以表现为负的滑动界面能。
实际上的滑动界面能与计算的滑动界面能的比较:
解决该问题的方法是扩充主段的接触面,如图所示,在两段交接处使接触面能捕捉

24
到接触渗透,由*CONTACT关键字中的MAXPAR参数调整。
2. 初始渗透初始渗透初始渗透初始渗透
在建立有限元模型中,可能会存在模型之间有干涉问题。程序在开始计算时会自动检查初始渗透,若有初始渗透,程序提出警告,并把这些节点移动到可能接触的界面上,在这过程中,系统要对之做功,导致负的滑动界面能产生。
3.4.10初始渗透初始渗透初始渗透初始渗透 从上面可知,初始渗透会导致负的滑动界面能产生,同时并不是所有的从节点都会移到主表面上,存在的渗透节点将会导致不切实际的接触行为。 解决方法: 方法一:在建立模型时应当花费时间和精力避免有初始渗透,尽量保持接触对中的接触空隙(考虑壳单元的厚度),但对于复杂的模型,不可避免会出现初始渗透,此时可根据第一次递交后程序给出的渗透信息(在 MESSAGE 和 D3HSP 文件中有详细记录),按照提示移动相关节点,调整计算模型,消除渗透。 方法二:对于比较小的初始渗透问题,可以通过减小接触厚度来解决,对应于 CONTACT关键字中的 SFST和 SFMT,该方法只对很小的初始渗透效果好,对于大的初始渗透,可能会导致错误的结果。 方法三:对于初始渗透问题,LSTC 公司在 LS-DYNA960 中增加了相关控制参数来处理该问题,在关键字*CONTROL_CONTACT中有一参数 IGNORE设置,可以忽略所有的初始穿透,对应 CONTACT关键字中都有相同参数可以对单个的接触对进行处理。
3.4.11 接触阻尼接触阻尼接触阻尼接触阻尼
接触阻尼刚开始主要是用来处理在金属冲压成型过程中出现的垂直于接触表面的法向数值振动问题,后来发现在碰撞中对于高频数值噪声的处理非常有效。通常定义临界阻尼的百分比值,在*CONTACT关键字中有 VDC参数,该参数定义临界阻尼的百分比值,一般定义为 20。 ,

25
无接触阻尼 有接触阻尼
3.4.12接触的定义接触的定义接触的定义接触的定义:::: 在 LS-DYNA中由关键字*CONTACT来定义接触,下面为一接触定义的例子:
从上面可以看出接触的定义中有很多的参数可以控制,在后面章节将对这些参数的意义和选择进行详细的阐述。
3.5 LS-DYNA的时间步控制的时间步控制的时间步控制的时间步控制
LS-DYNA采用的显式中心差分法是有条件稳定的,只有当时间步小于临界时间步时稳定(参见第二章显式积分方法):
其中 =maxω 最大自然角频率
杆件的临界时间步长 由杆件的自然频率 其中 (波传播速度)
∆ ∆t tcrit≤ =
2
ω max

26
得杆件临界时间步长为:
其中特征长度 l和波速c取决于单元类型:
� 梁单元:
� 壳单元:
� 体单元: 对于 8节点实体单元: maxAVl = , maxA 为单元最大一侧的面积。
( )( )( )ρµµ
µ
−+
−=
11
1Ec 对于 4节点实体单元: =l 最小高度 临界时间步尺寸由 LS-DYNA自动计算。它依赖于单元长度和材料特性,LS-DYNA在计算所需时间步时检查所有单元,为达到稳定采用一个比例系数(缺省为 0.9)来减小时间步:
从而对于整个有限元模型来说,控制实际计算时间步长的是最小尺寸单元,当模型的网格质量不是很好的时候,如有很多的小单元存在,此时计算的时间将成倍的增加,为减小计算量,需要人为地控制 LS-DYNA时间步长,称之为质量缩放,此时在不改变有限元模型的前提下,加大实际计算时间步长,以壳单元为例:
单元单元单元单元 1 2 3
l1 l2 l3

27
由上面公式可知,可以通过调整该单元的密度来增大它的时间步长(弹性模量一般不调整,因为接触中需要真实的弹性模量),LS-DYNA由关键字*CONTROL_TIMESTEP中参数DT2MS来人为控制时间步长,通过输入期望的实际计算时间步长,程序自动增加对应单元的密度:
在 LS-DYNA中,有两种质量缩放方案:
•DT2MS为正的时间步: 通过调整单元密度,使得所有单元都具有相同的时间步长,只用于惯性效应不重要时。 •DT2MS为负的时间步: 质量缩放只用于小于指定时间步长 Dt的单元。
使用质量缩放可以显著地降低求解的时间,需要注意的是,某些单元密度的增加必然导致有限元模型整体质量的额外增加,当需要考虑模型的惯性效应时,应该对增加质量的百分比进行控制(同时还需考虑接触的稳定性),即不可任意的设定实际计算时间步长,一般情况下,应控制质量增加百分比在 5%之内,在 LS-DYNA运行窗口中有该参数的显示。
3.6沙漏问题沙漏问题沙漏问题沙漏问题
LS-DYNA应用单点(缩减)高斯积分的单元进行非线性动力分析可以极大的节省计算机时,也有利于大变形分析。但是单点积分可能引起零能模式,或称沙漏模式(参见第二章)。 沙漏是一种以比结构全局响应高得多的频率震荡的零能变形模式,是单元刚度矩阵中秩不足导致的,而这些是由于积分点不足导致的。沙漏模式导致一种在数学上是稳定的、但在物理上无法实现的状态。他们通常没有刚度,变形呈现锯齿形网格,单点实体单元的沙漏模式如图,即单元可以按照绿线的形状变动。
总体表现形式:
ρν )1( 2
2minmin
−=
==∆
Ec
c
l
c
lt
( ) 的密度为单元 il
Et
El
t
i
specified
i
i
i
specified
)1(
)1(
22
2
22
νρ
ρν
−
∆=
−=
∆
csu
矩形

28
壳单元 体单元
在分析中沙漏变形的出现使结果无效,所以应尽量减小和避免。如果总体沙漏能超过模型总体内能的 10%,那么分析可能就是无效的,有时侯甚至 5%的沙漏能也是不允许的。所以非常有必要对它进行控制。 方法一:总体调整模型的体积粘度可以减少沙漏变形, 粘性沙漏控制推荐用于快速变形的问题中(例如激振波)。人工体积粘度本来是用于处理应力波的问题,因为在快速变形过程中,结构内部产生应力波,形成压力、密度、质点加速度和能量的跳跃,为求解的稳定性,加进人工体积粘性,使应力波的强间断模糊成在相当狭窄区域内急剧变化但却是连续变化的。由于沙漏是一种以比结构全局响应高得多的频率震荡,调整模型的体积粘度能减少沙漏变形,在 LS-DYNA中由关键字*CONTROL_BULK_VISCOSITY控制。 方法二:通过总体附加刚度或粘性阻尼来控制,由关键字*CONTROL_HOURGLASS控制,对于高速问题建议用粘度公式(缺省),对于低速问题建议用刚度公式(4、5)。 方法三:为防止模型的总体刚度因附加刚度而增加过大时,可不用总体设置附加刚度或粘度,可通过关键字*HOURGLASS来对沙漏能过大的 PART进行沙漏控制,参数与总体设置一样(通过*PART关键字与相关 PART建立连接)。 方法四:使用全积分单元,由于沙漏是由于单点积分导致的,所以可以使用相应的全积分单元来控制沙漏,此时没有沙漏模式,但在大变形情况下模型过于刚硬。
其实通过使用好的模型方式可以减少沙漏的产生:网格的细化,避免施加单点载荷,分散一些全积分的“种子”单元于易产生沙漏模式的部件中从而减少沙漏。
3.7刚刚刚刚 体体体体 用 LS-DYNA中的材料*MAT_RIGID定义有限元模型中刚硬部分可以大大减少 CPU计算时间,这是因为刚体内所有节点的自由度都耦合到刚体的质量中心上,不论有限元模型定义了多少节点,刚体仅有六个自由度。程序通过组成刚体的单元的体积和密度自动计算出质量、质心和惯量特性。作用于刚体上力和力矩由每一时间步的节点值叠加而得,刚体的运动通过质心计算而得,并把相应的位移值传递给节点。 使用刚体应注意的问题:
1. 不可对刚体上的节点进行单点约束,刚体的约束通过*MAT_RIGID材料定义中的相关参数来设置平动约束和转动约束,施加在质心上。
2. 刚体的材料参数应使用真实的值,如杨氏模量(在接触中用来计算接触力)、泊松比和密度。不可认为刚体不变形而把杨氏模量设置为任意大。
csu
线条
csu
线条
csu
线条
csu
线条
csu
线条

29
3. 缺省地情况下,LS-DYNA自动地通过有限元网格(单元体积,密度,位置)来计算刚体的惯性。当模型比较复杂或网格比较粗糙时,人工定义刚体的惯性要比缺省值更准确,通过*PART_INERTIA关键字重新定义。
4. 两个刚体不能共用同一节点,两刚体可通过*CONSTRAINED_RIGID_BODIES关键字进行合并。
5. 材料可以在变形体和刚体之间转换,是模拟具有长时间不变形运动过程的冲击事件时的一种高效方式(比如,汽车翻滚)(*DEFORMABLE_TO_RIGID)
刚体的用途:
1. 节省 CPU时间:将结构中变形不重要的部位定义为刚体 (如:金属冲压成型中的模具),这样可以大大节省 CPU时间。
2. 连接相关的 PART: 刚体 PART与刚体 PART的连接:使用两刚体合并的功能(*CONSTRAINED_RIGID_BODIES) 刚体 PART与柔性体 PART的连接:使用隶属于刚体的特殊节点来定义,即选择连接部位处柔性体 PART上的一系列节点(使用前面讲到的*SET关键字功能),把它们定义成刚体PART上的特殊节点集(*CONSTRAINED_EXTRA_NODES) 柔性体 PART与柔性体 PART连接:通过选择连接部位处两柔性体 PART上的一系列节点,把它们定义成一个节点刚体。(*CONSTRAINED_NODAL_RIGID_BODY) 当然 PART与 PART的连接方式还有很多种,如铰链,铆接,焊接等等,这些功能的实现将在后面进行阐述。
3.8材料的定义材料的定义材料的定义材料的定义 在 LS-DYNA中有将近 140多种材料模型,提供了丰富的材料库,大家知道有限元分析结果的准确性很大程度上依赖于材料模型的选择和材料参数的确定。花费较多的时间了解材料模型和获得准确的材料参数是非常必要的。本节将对 LS-DYNA中所使用的材料模型进行简单的说明。
LS-DYNA材料的分类:
� 弹性
� 弹塑性
� 正交各向异性/各向异性
� 超弹性(橡胶)
� 泡沫
� 复合材料
� 粘弹性
� 心脏/肺等生物材料
� 声学材料
� 纺织物材料
� 混凝土/土壤
� 炸药材料
� 层合玻璃
� 刚体
� 用户自定义材料
LS-DYNA定义材料使用*MAT关键字,如定义弹性材料为*MAT_ELASTIC,不同的材料类型有不同的名称,也有不同的参数输入要求,详情请参见 LS-DYNA材料使用手册。在本节中主要说明材料定义中的一些基本概念,尤其针对应用较广的各向同性弹塑性材料进行阐述:

30
3.8.1工程应力应工程应力应工程应力应工程应力应变变变变、、、、真实应力应变和有效应力应变曲线区别真实应力应变和有效应力应变曲线区别真实应力应变和有效应力应变曲线区别真实应力应变和有效应力应变曲线区别 在 LS-DYNA的一些材料模型定义中,有时需要输入应力应变曲线,一般情况下要求输入真实应力应变曲线,或有效应力应变曲线,必须明白这些曲线的真正概念,才能正确的输入材料参数。 如果对材料做单向拉伸实验,得到力和位移响应曲线如图:
通过下面公式得到上图右的工程应力应变曲线:
需通过下面公式的换算,才可得到真实应力应变曲线:
从真实应力应变曲线中移去弹性应变即得到有效应力应变曲线:
eσσσσ
eε
oA
f
ol
d
f
d
oA
f
AreaOriginal
ForceStressgEngineerin ========
oL
d
LengthOriginal
LengthinChangeStraingEngineerin ========
(((( ))))ee
co AA
fl
AreaCurrent
ForceStresssCauchyStressTrue εεεεσσσσ ++++================ 1'
(((( ))))e
ol
l
LengthCurrent
LengthinChangeStrainTrue εεεε++++====
======== 1lnln
eσσσσ
eε
o
eA
f====σσσσ
tσσσσ
(((( ))))ee εεεεσσσσ ++++1
)1ln( eεεεε++++ tε

31
该曲线描述屈服应力与有效塑性应变之间的函数关系。
3.8.2 弹塑性材料的几种常用本构模型弹塑性材料的几种常用本构模型弹塑性材料的几种常用本构模型弹塑性材料的几种常用本构模型((((各向同性各向同性各向同性各向同性):):):):
1. 理想弹塑性:材料达到屈服后应力不再增加,即没有塑性硬化产生。材料参数需定义密度、弹性模量、泊松比和屈服应力。 对应关键字:*MAT_PLASTIC_KINEMATIC(切线模量定义为零)
2. 双线性弹塑性:材料达到后沿线性硬化,需定义切线模量。材料参数需定义密度、弹性模量、泊松比、切线模量和屈服应力。
effσσσσ
effεεεε
xxvmeffStressEffective σσσσσσσσσσσσ ============
EStrainEffective xx
xx
σσσσεεεε −−−−====
eε
eσ
yd
dE σσ
ε
σ<= ,
yσ

32
对应关键字:*MAT_PLASTIC_KINEMATIC。
3. 指数硬化弹塑性:材料达到屈服后按指数关系塑性硬化。材料参数需定义密度、弹性模量、泊松比、强化系数 K和硬化指数 n。 对应关键字为:*MAT_POWER_LAW_PLASTICITY
4. 多线性弹塑性:材料达到屈服后硬化曲线由多线段组成。材料参数需定义密度、弹性模量、泊松比、屈服应力及有效应力应变曲线。 对应关键字为:*MAT_PIECEWISE_LINEAR_PLASTICITY
eε
eσ
yd
dE σσ
ε
σ<= ,
yσyTAN
d
dE σσσσσσσσ
εεεε
σσσσ>>>>==== ,
yσ
eε
eσ
yd
dE σσ
ε
σ<= ,
(((( )))) y
npyn forkk σσσσσσσσεεεεεεεεεεεεσσσσ >>>>++++======== ,

33
3.8.3应变率的影响应变率的影响应变率的影响应变率的影响:::: 对于弹塑性材料来说,应变的变化快慢会影响到材料的塑性行为,高应变率会导致材料的动力硬化行为,这种情况下必须考虑应变率对材料特性的影响(如高速碰撞)。
LS-DYNA提供 4种常用方式来考虑应变率的影响:
� Cowper-Symonds 方式 � 幂指数方式 � 屈服应力为应变率的函数方式 � 不同应变率的硬化曲线以表的方式输入 当然还可应用其它的公式来考虑应变率的影响,如 JOHNSON-COOK方式,如 15号材
eε
eσ
yd
dE σσ
ε
σ<= ,
yσ
effσσσσ
effεεεε
εεεε&

34
料*MAT_JOHNSON_COOK。
Cowper-Symonds 方式方式方式方式:::: 屈服应力通过下面的公式来计算:
C和 P为用户定义的应变率参数,如对于某种钢来说可定义他们为 40和 6,对各种材料应变率参数的确定可参考相关材料手册。
幂指数方式幂指数方式幂指数方式幂指数方式 考虑应变率影响的屈服应力由下面公式确定:
用户定义应变率参数 n。 屈服应力为应变率的函数方式屈服应力为应变率的函数方式屈服应力为应变率的函数方式屈服应力为应变率的函数方式
定义一条曲线说明屈服应力(有时是屈服应力缩放因子)与应变率的关系,如图:
不同应变率的硬化曲线以表的方式输入不同应变率的硬化曲线以表的方式输入不同应变率的硬化曲线以表的方式输入不同应变率的硬化曲线以表的方式输入
即把不同应变率下的有效应力应变曲线以表的方式输入,来考虑应变率的影响,如图:
effσσσσ
εεεε&

35
缺省状态下,考虑应变率的影响都是缩放屈服应力方式,通过设置参数 VP=1(在所有考虑应变率影响的材料模型中都有该参数)来激活粘塑性公式,结合缩放屈服应力方式处理应变率的影响。建议在大多数的应用中使用该方式,因为加入粘塑性公式可以减少考虑应变率时的响应噪声,并保证在不同硬件平台上结果的一致性,当然也会增加一定的 CPU开销。 上面提到的几种材料模型都可考虑应变率的影响,此外还有一种材料可以很方便的考虑应变率的影响:19号材料*MAT_STRAIN_RATE_DEPENDENT_PLASTICITY,该材料模型不仅可以考虑应变率对屈服应力的影响,还可以考虑应变率对弹性模量、切线模量和 Von
Mises失效应力的影响。
3.8.4判断材料失效的准则判断材料失效的准则判断材料失效的准则判断材料失效的准则 材料失效的现象比较复杂,但强度不足引起的失效现象主要还是屈服和断裂两种现象。目前有四种常用的强度理论: 第一强度理论:最大拉应力理论
[ ]σσ ≤1 (许用应力[ ] 安全系数强度极限 bσσ = )
第二强度理论:最大伸长线应变理论
[ ]σσσµσ ≤+− )( 321 (许用应力[ ] 安全系数强度极限 bσσ = )
第三强度理论:最大剪应力理论
[ ]σσσ ≤− 31 (许用应力[ ] 安全系数屈服极限 sσσ = )
第四强度理论:形状改变比能理论(Von Mises 应力)

36
[ ] [ ]σσσσσσσ ≤−+−+− 2
13
2
32
2
21 )()()(2
1 (许用应力[ ] 安全系数屈服极限 sσσ = , 1σ 、 2σ 、 3σ 为三个主应力) 对于铸铁、石料、混凝土和玻璃等脆性材料,通常以断裂形式失效,可采用第一和第二强度理论,对于碳钢、铜、铝等塑性材料,通常以屈服形式失效,可采用第三和第四强度理论。LS-DYNA的结果文件都包含了三个主应力、最大剪应力和 Von Mises应力的数值。可根据具体材料选择相关的强度理论来判断材料失效。
LS-DYNA还提供单元失效的方式来说明材料失效,在较多的材料模型中,可定义失效应变或失效应力,如果使用的材料没有参数定义失效应变或失效应力,或想改变材料已有的失效模式,LS-DYNA 提供材料关键字*MAT_ADD_EROSION 来获得或改变材料的失效模式。
注:本章节中引用的图片部分来自 LSTC公司。