Capitolo 2 POSTURA ED EQUILIBRIO - · PDF fileSul piano superficiale: il trapezio e il gran...
63
1 Capitolo 2 POSTURA ED EQUILIBRIO La capacità di conservare il controllo dell’equilibrio è fondamentale per il mantenimento dell’indipendenza funzionale e per il miglioramento della performance sportiva: esse vengono degradate non solo dall’età (Era and Heikkinen, 1985), ma anche, ed in modo indipendente, dall’insorgere di malattie degenerative o traumatiche del sistema nervoso e dell’apparato locomotore (Horak et al., 1989). La comprensione dei meccanismi che sottendono le strategie per il controllo dell’equilibrio durante la stazione eretta si è assai perfezionata anche grazie alle tecniche di posturografia statica (piattaforme di forza per lo studio delle oscillazioni e dei carichi a livello dell’appoggio durante la stazione eretta), dinamica (piattaforme mobili) ed all’analisi del cammino (baropodometria).
Transcript of Capitolo 2 POSTURA ED EQUILIBRIO - · PDF fileSul piano superficiale: il trapezio e il gran...

1
Capitolo 2
POSTURA ED EQUILIBRIO
La capacità di conservare il controllo dell’equilibrio è
fondamentale per il mantenimento dell’indipendenza funzionale e
per il miglioramento della performance sportiva: esse vengono
degradate non solo dall’età (Era and Heikkinen, 1985), ma anche,
ed in modo indipendente, dall’insorgere di malattie degenerative o
traumatiche del sistema nervoso e dell’apparato locomotore
(Horak et al., 1989).
La comprensione dei meccanismi che sottendono le strategie per
il controllo dell’equilibrio durante la stazione eretta si è assai
perfezionata anche grazie alle tecniche di posturografia statica
(piattaforme di forza per lo studio delle oscillazioni e dei carichi a
livello dell’appoggio durante la stazione eretta), dinamica
(piattaforme mobili) ed all’analisi del cammino (baropodometria).

2
2.1 LA POSTURA
Il termine postura può essere riferito a tutto il corpo, ovvero
all’atteggiamento del corpo in diverse condizioni statiche o
dinamiche, oppure a parti del corpo, intendendo così fare
riferimento alla posizione ed alla relazione reciproca di diversi
segmenti.
In senso stretto, esiste una differenza tra postura ed equilibrio: il
termine postura di per sé non implica equilibrio.
Il concetto di equilibrio emerge quando si parla della postura
antigravitaria, la quale consiste nella postura del corpo e dei suoi
segmenti durante la stazione eretta, sia in condizioni statiche che
durante un movimento contro gravità.
In questo caso, il mantenimento della postura è condizionato da
un buon controllo dell’equilibrio, ovvero dal fatto che la proiezione
del centro di massa del corpo cada all’interno della base di
appoggio.
La conservazione di una postura antigravitaria è un processo
attivo che implica: il mantenimento prolungato di determinate
posizioni del corpo e dei suoi segmenti, lo sviluppo della forza
necessaria a sostenere il peso del corpo contro l’azione della
3
gravità, l’esecuzione di movimenti correttivi per compensare
possibili perturbazioni interne od esterne che minaccino
l’equilibrio.
Il termine postura di per sé non coinvolge l’orientamento dei
diversi segmenti o dell’intero corpo nello spazio.
Il termine orientamento si riferisce alla postura del corpo e dei
suoi segmenti durante un compito motorio direzionale, in
riferimento a coordinate spaziali dell’ambiente.
Durante la stazione eretta, il corpo si dice orientato nella direzione
della gravità, durante la locomozione, il corpo o la testa possono
essere orientati nella direzione della traiettoria.
2.2 LA STAZIONE ERETTA
La postura antigravitaria è controllata dal sistema nervoso che
contrasta la forza di gravità attraverso il controllo del tono dei
muscoli posturali (ad esempio il tricipite surale, il quadricipite, i
muscoli estensori paravertebrali, i muscoli dorsali del collo),
mantiene una adeguata posizione dei segmenti corporei (per
esempio tenendo i due piedi attaccati al suolo o le braccia lungo il

4
corpo), controlla la stabilità della stazione eretta a fronte di
perturbazioni (il vero e proprio controllo dell’equilibrio).
Per quanto riguarda il controllo dell’equilibrio durante la stazione
eretta, si individuano tre meccanismi fondamentali (Massion,
1992; Massion et al., 2004):
1) feedback continuo (stazione eretta quieta), una condizione in
cui il sistema nervoso riceve continuamente input dai piedi, dai
muscoli, dalle articolazioni, dagli occhi, dal labirinto, dall’apparato
stomatognatico ed integra queste informazioni (toniche)
nell’attività del sistema di controllo dell’equilibrio;
2) feedback discontinuo (stazione eretta perturbata), condizione in
cui il normale input tonico dai recettori sensoriali viene scavalcato
da un’improvvisa serie di informazioni, provenienti dagli stessi
recettori, che viene trattata dal sistema nervoso centrale in modo
differente (si scatenano riflessi);
3) feed-forward, ovvero in condizioni di perturbazioni prevedibili,
come quando la perturbazione dell’equilibrio origina dal
movimento volontario: questa è la condizione nella quale si
osservano aggiustamenti posturali anticipatori, ovvero movimenti
preparatori che spostano il corpo verso un punto dal quale è più

5
difficile essere destabilizzati dal movimento impellente; la
coordinazione tra postura e movimento che si osserva durante la
locomozione (un compito in cui il controllo dell’equilibrio è la ovvia
condizione per poter procedere tranquillamente nella direzione
voluta) è un esempio di feed-forward .
La valutazione della postura durante la stazione eretta tranquilla
non perturbata viene effettuata con una pedana stabilometrica.
2.3 ORIGINE DELLE OSCILLAZIONI
POSTURALI
L’equilibrio del corpo umano può essere
rappresentato come un pendolo invertito, le
cui oscillazioni rimangono all’interno di un
range di 4°, il fulcro si trova a livello
malleolare, la parte oscillante a livello del
capo (Fig. 1).
(Fig. 1): pendolo invertito
6
Il mantenimento dell’equilibrio così diventa poco dispendioso,
sono eliminati di fatto i gradi di libertà inutili.
Le oscillazioni posturali forniscono al sistema nervoso centrale un
input sensoriale di riferimento proveniente da diversi recettori
attivati da questi piccoli movimenti.
Quali siano le cause delle oscillazioni posturali non è chiaro.
Certamente esse sono la condizione per permettere l’attivazione
dei recettori; poiché molti dei recettori sono a rapido adattamento,
l’assenza di movimenti non verrebbe segnalata al sistema
nervoso centrale.
Meglio quindi piccoli movimenti intorno ad una posizione virtuale
media del centro di pressione (il cui percorso può essere
ricostruito registrandone le posizioni in un tempo prestabilito),
piuttosto che nessuna informazione da un corpo ipoteticamente
bloccato nello spazio.
Peraltro le oscillazioni sono a loro volta collegate a piccole
perturbazioni della stazione eretta e dipendono dalla normale
presenza di forze destabilizzanti l’equilibrio, quali l’attività
cardiaca, l’attività respiratoria, l’attività incostante delle unità
motorie.

7
A fronte di queste ed altre perturbazioni, quali per esempio il
movimento volontario, il sistema nervoso centrale oppone
componenti passive ed attive stabilizzanti l’equilibrio.
Tra le prime ci sono l’inerzia del corpo e la visco-elasticità di
legamenti, tendini e muscoli.
Tra le seconde, ci sono i meccanismi prima citati di controllo a
feedback continuo, quali quelli che controllano la stazione eretta
quieta e che sono basati sulle informazioni recettoriali.
Vanno inoltre considerati i meccanismi a feedback discontinuo
quali quelli che contribuiscono al mantenimento della stazione
perturbata da qualche evento esterno od interno, ed i meccanismi
a feed-forward, che intervengono nel controllo della coordinazione
posturo-cinetica, ovvero del passaggio dalla stazione eretta ad un
movimento o dalla coordinazione tra postura e movimento, una
volta che questo sia iniziato.
È evidente, quindi, che il sistema nervoso nel suo complesso
interviene nel controllo dell’equilibrio, e che questo controllo vede
meccanismi riflessi interagire con meccanismi più complessi che
implicano anche l’intervento di centri superiori.
8
Certamente solo i centri superiori possono essere in grado di
anticipare le possibili perturbazioni legate alla destabilizzazione
provocata dall’esecuzione di un movimento volontario.
9
Capitolo 3
METODICHE DI TRAINING POSTURALE
3.1 LE CATENE MUSCOLARI
Le catene muscolari sono rappresentate da una serie di muscoli
contigui tra loro, ogni singolo muscolo rappresenta un anello della
catena che abbraccia l’intera struttura corporea. Grazie a queste
acute osservazioni la fisioterapista francese F. Mézières
raggruppò il sistema muscolare in quattro catene muscolari:
1. CATENA POSTERIORE
2. CATENA ANTERO-INFERIORE
3. CATENA ANTERIORE DEL BRACCIO
4. CATENA ANTERIORE DEL COLLO
Ognuna di queste catene é costituita da specifici muscoli e svolge
particolari funzioni che ora andremo singolarmente ad
approfondire.

10
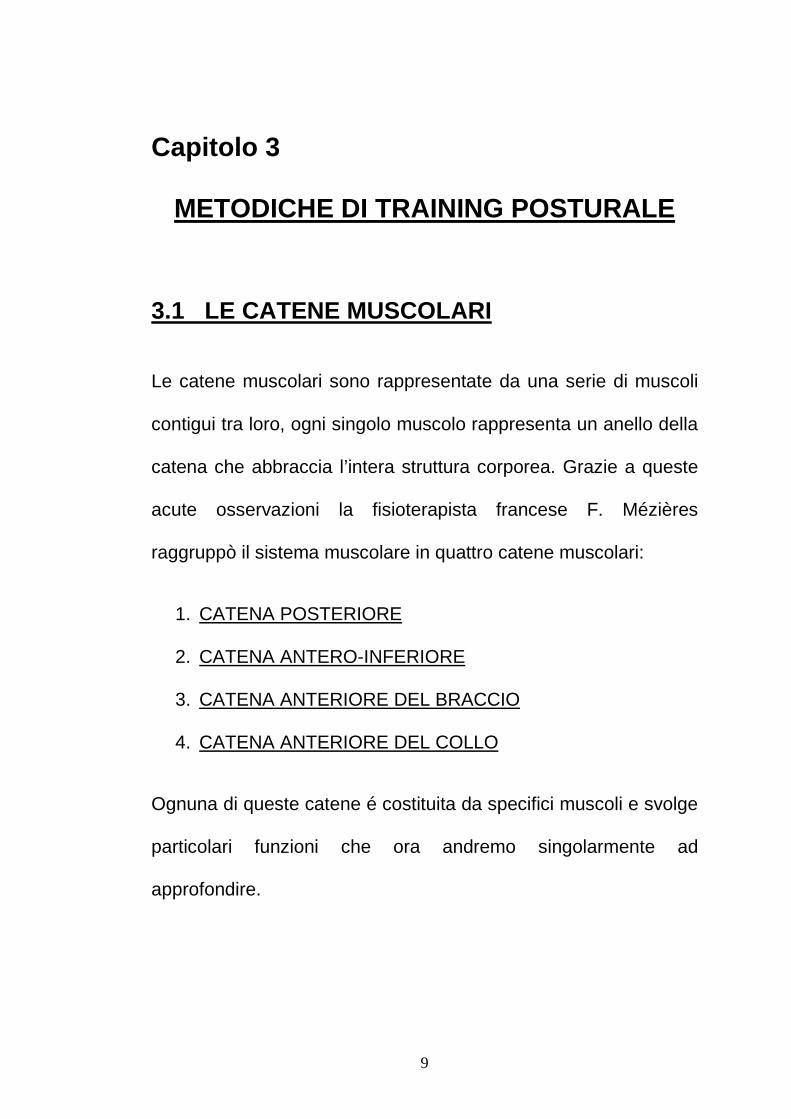
3.1.1 LA CATENA POSTERIORE
E’ la catena muscolare più estesa; è
formata da tutti i muscoli profondi e
superficiali che vanno dalla linea occipitale
alla punta delle dita dei piedi (Fig. 2).
A livello cranio-sacrale troviamo:
1. Sul piano superficiale: il trapezio e
il gran dorsale.
2. Sul piano medio: i romboidei,
l’elevatore della scapola e i dentati postero-
superiori e postero-inferiori.
3. Il piano profondo può essere suddiviso a
(Fig. 2) sua volta in tre piani :
a) Il piano superficiale comprende: l’erettore della colonna a sua
volta suddiviso in tre porzioni che prendono nomi specifici in
relazione al distretto rachideo nel quale si inseriscono.
b) Il piano intermedio è rappresentato dal trasverso spinoso.
c) Il piano profondo comprende invece i muscoli interspinosi e i
muscoli intertrasversi.
11
Sulla regione posteriore dell’arto inferiore, al di sotto dei glutei,
troviamo il semimembranoso, il semitendinoso, il bicipite femorale,
gli adduttori, il popliteo, i gemelli, il soleo, il plantare gracile, il
tibiale posteriore, i flessori lunghi delle dita ed infine i flessori
plantari sulla regione posteriore del piede.
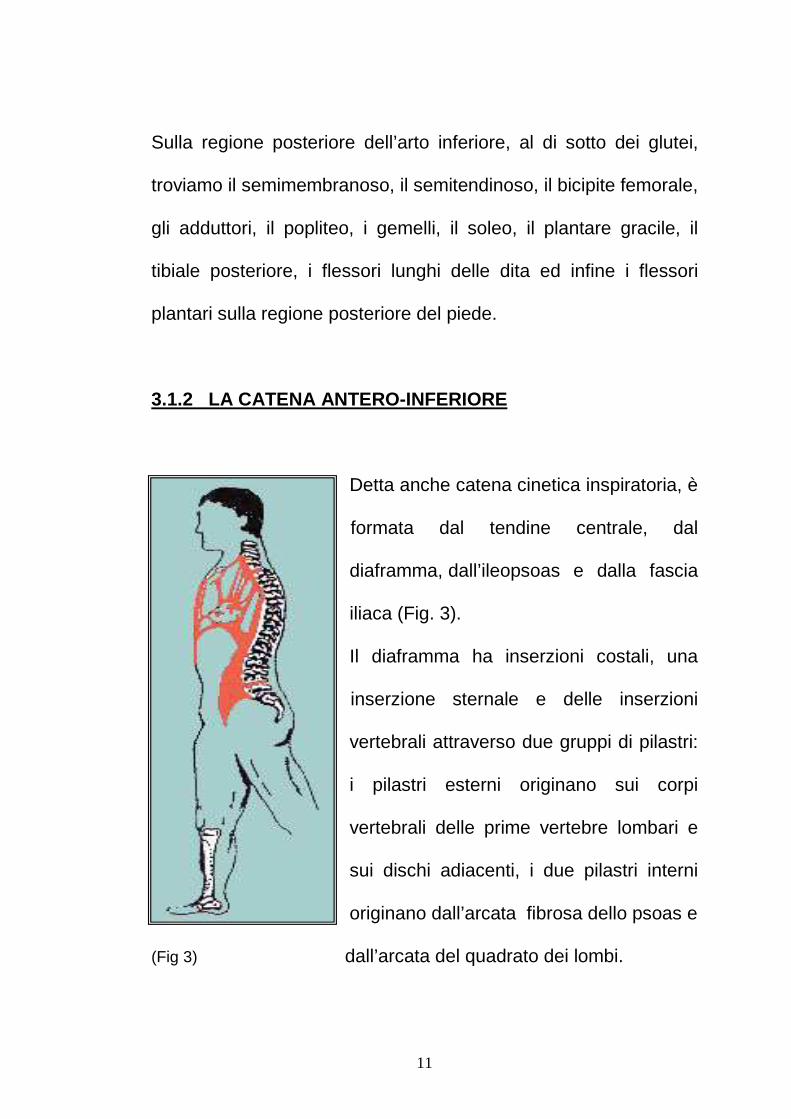
3.1.2 LA CATENA ANTERO-INFERIORE
Detta anche catena cinetica inspiratoria, è
formata dal tendine centrale, dal
diaframma, dall’ileopsoas e dalla fascia
iliaca (Fig. 3).
Il diaframma ha inserzioni costali, una
inserzione sternale e delle inserzioni
vertebrali attraverso due gruppi di pilastri:
i pilastri esterni originano sui corpi
vertebrali delle prime vertebre lombari e
sui dischi adiacenti, i due pilastri interni
originano dall’arcata fibrosa dello psoas e
(Fig 3) dall’arcata del quadrato dei lombi.
12
Quando attraverso i suoi pilastri il diaframma prende punto fisso in
alto, sulle coste e sullo sterno, porta la colonna lombare in alto e
in avanti, diventa quindi un muscolo lordosizzante.
L’inserzione comune con lo psoas determina ugualmente uno
spostamento della colonna verso il basso ma sempre in avanti
(riduzione del diametro verticale della colonna lombare), pertanto
anche l’ileopsoas ha un’azione lordosizzante.
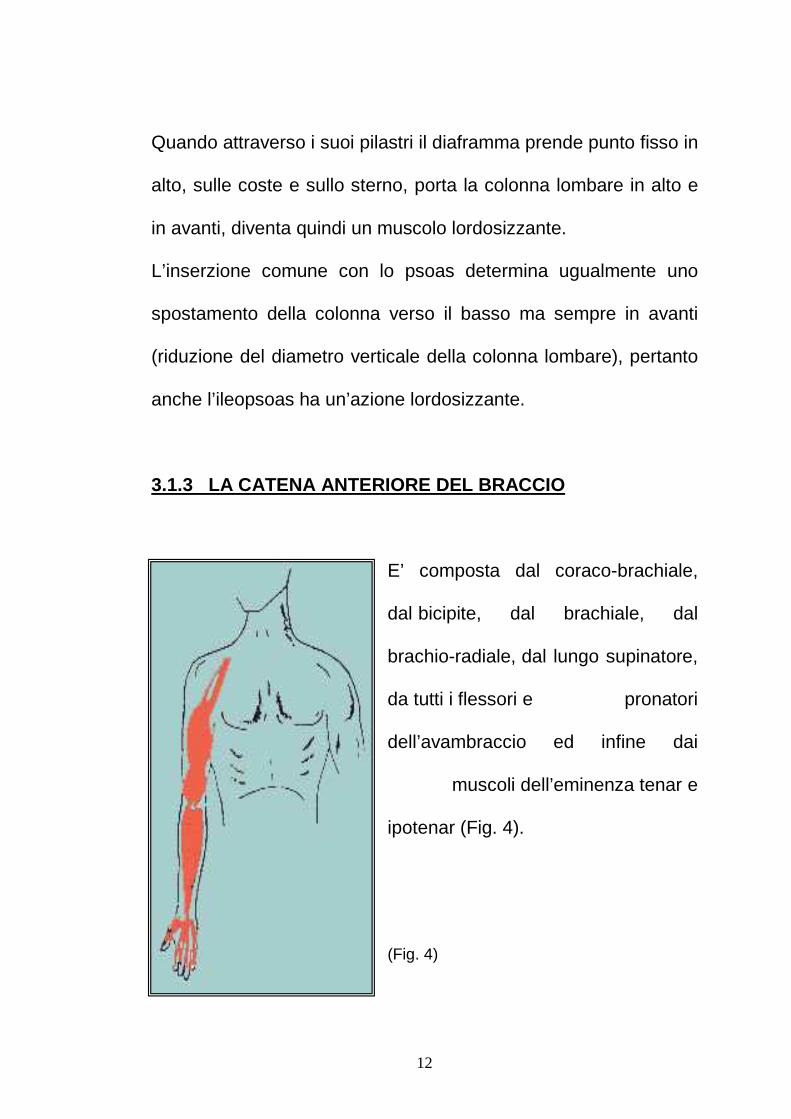
3.1.3 LA CATENA ANTERIORE DEL BRACCIO
E’ composta dal coraco-brachiale,
dal bicipite, dal brachiale, dal
brachio-radiale, dal lungo supinatore,
da tutti i flessori e pronatori
dell’avambraccio ed infine dai
muscoli dell’eminenza tenar e
ipotenar (Fig. 4).
(Fig. 4)

13
Dal punto di vista filogenetico, il passaggio dell’uomo alla stazione
eretta ha obbligato la muscolatura anteriore del braccio a lavorare
prevalentemente in maniera concentrica; basti pensare alla fase
di passata nel canottaggio (fase in cui il remo spinge in acqua).
E’ dunque una catena più predisposta a fenomeni di retrazione.
L’accorciamento cronico di questa catena determina una flessione
del gomito e una pronazione eccessiva dell’avambraccio alla
quale si somma una intrarotazione di tutto l’arto superiore
mantenuta dalla rigidità del gran dorsale e del grande rotondo
posteriormente, anteriormente del gran pettorale.
3.1.4 LA CATENA ANTERIORE DEL COLLO
E’ formata dal piccolo e dal grande retto,
dal lungo del collo e dal tendine centrale
che collega il rachide cervicale al
diaframma e all’asse viscerale (Fig. 5).
(Fig. 5)

14
Il piccolo retto va dalla massa laterale dell’atlante all’apofisi
basilare dell’occipite, il grande retto va dalle apofisi trasverse di
C3-C6 all’apofisi basilare dell’occipite.
Il lungo del collo è composto da tre parti: da fibre oblique
discendenti, fibre oblique ascendenti e da fibre longitudinali che
collegano l’atlante a D1, D2, D3. L’intera catena si estende quindi
dall’apofisi basilare dell’occipite al corpo della terza vertebra
dorsale.
Quando prende punto fisso in basso porta in avanti il collo
aumentando la lordosi cervicale, quando invece prende punto
fisso in alto è una catena accessoria della inspirazione.
Quindi, i muscoli della catena anteriore del collo, pur avendo una
inserzione anteriore accorciandosi aumentano la lordosi
posteriore (azione lordosizzante).
15
3.2 LA RIEDUCAZIONE POSTURALE
GLOBALE
La Rieducazione Posturale Globale (R.P.G.) è una metodica di
riarmonizzazione e di riequilibrio della struttura muscolo-
scheletrica messa a punto dal francese Prof. Philippe E.
Souchard.
Lo studio, la diagnosi e la terapia della postura secondo questa
metodologia, partono da concetti base sull’evoluzione funzionale
dell’individuo.
Il bambino appena nato non può stare in piedi, ma
inesorabilmente egli otterrà la grande vittoria di alzarsi contro la
forza di gravità, realizzando il difficile “esercizio” della bipedia.
Questo traguardo viene raggiunto grazie allo sviluppo graduale di
muscoli chiamati muscoli della statica (o muscoli tonici), i quali
sono capaci di lottare e vincere la gravità, consentendo al
bambino di alzare prima la testa poi il dorso fino ad ergersi
autonomamente sulle proprie gambe.
16
Si tratta di una muscolatura molto fibrosa e tonica che
rappresenta circa i due terzi di tutta la massa muscolare del
nostro corpo.
I muscoli della statica hanno la particolarità di essere
perennemente in attività, anche a riposo, costituendo uno
straordinario sistema di auto-regolazione posturale che garantisce
la stabilità.
Se la posizione eretta è garantita dalla muscolatura statica,
“aggiustata” continuamente da oscillazioni, opportunamente
frenate, necessarie all’equilibrio ed al mantenimento del Centro di
Pressione (COP) all’interno della base d’appoggio, i muscoli della
dinamica consentono lo spostamento ed il movimento, essi non
sono fibrosi, non hanno molto tono e sono in genere aiutati da
quelli statici.
I muscoli della statica coadiuvano il movimento e lo frenano
mantenendo sempre un tono elevato; i muscoli della dinamica al
termine della contrazione, giacchè non sono indispensabili alla
posizione eretta, tornano alla loro decontrazione naturale.

17
Ne consegue che i muscoli statici non si riposano mai e, quindi,
tendono alla rigidità ed all’accorciamento mentre i muscoli
dinamici tendono al rilassamento (Tab. 1).
(Tab. 1): caratteristiche anatomiche e funzionali dei muscoli tonici e fasici
(Stockmeyer 1970, integrata da Spring et al. 1986).
MUSCOLI TONICI MUSCOLI FASICI
- Hanno funzione di sostegno (posturali)
- Si affaticano tardivamente
- Contengono più fibre muscolari rosse
(lente)
- Si contraggono più lentamente
- Reagiscono al carico errato con
accorciamento e peggioramento
funzionale
- Sono più forti di circa 1/3
- Esprimono la massima potenza a
velocità di contrazione moderata
- Se inattivi divengono più lentamente
deboli
- Tendono ad accorciarsi a causa della
continua tensione a cui sono sottoposti
- Hanno funzione di movimento
- Si affaticano precocemente
- Contengono più fibre muscolari bianche
(rapide)
- Si contraggono più rapidamente
- Reagiscono al carico errato con
indebolimento e peggioramento funzionale
- Sono più deboli
- Esprimono la massima potenza a velocità
di contrazione elevata
- Se inattivi divengono più rapidamente
deboli
- Tendono ad allungarsi con l’inattività

18
In base alla principale funzione svolta i muscoli possono essere
suddivisi in:
- muscoli fasici o dinamici (deputati al movimento);
- muscoli tonici o statici (antigravitari o posturali).
Ciò condiziona tutta la nostra patologia muscolare; infatti i muscoli
dinamici come gli addominali, ad esempio, possono rilassarsi per
mancanza di attività sportiva, mentre i muscoli statici come gli
spinali, i polpacci, gli ischio-crurali, sono sempre affaticati e rigidi
perché costantemente sollecitati dalla gravità.
In questo esempio gioca un ruolo fondamentale il concetto di
debolezza muscolare perché paradossalmente entrambi i muscoli
sia della statica che della dinamica possono essere colpiti da
insufficienza.
La fisioterapia classica come anche le tecniche di allenamento,
tendono indiscriminatamente a rafforzare, con la muscolazione,
entrambi i gruppi muscolari.
Questa metodica è usata unanimemente di fronte ad un paziente
con ipercifosi dorsale (avvolgimento anteriore della colonna
vertebrale), ma gli studi di Souchard attribuiscono la
19
responsabilità di tale patologia posturale al sistema muscolo-
fibroso anteriore (catena muscolare antero-inferiore), che
sorregge i nostri organi e, senza il quale, le nostre viscere non
sarebbero sospese.
Quindi, piuttosto che tonificare i muscoli dorsali il soggetto
ipercifotico dovrà allungare la sua catena muscolare antero-
inferiore. Questo semplice esempio dimostra che il nostro modo di
reggerci, buono o cattivo, dipende dalla relazione che hanno i
muscoli della statica tra loro. I più tonici tirano sempre dalla loro
parte. Tirato avanti o tirato indietro?
Questo è l’intelligente quesito che in R.P.G. i terapisti si pongono
prima di affrontare un trattamento. La metodica R.P.G. consedera
debole sia un muscolo rigido, cioè accorciato, che un muscolo
eccessivamente allungato.
Un muscolo è esattamente come un elastico ed allo stesso modo
di una molla, non è capace di accorciarsi molto se prima non è
stato teso abbastanza. La forza quindi è direttamente
proporzionale all’elasticità. Quindi cercare di rinforzare i muscoli
statici al punto di irrigidirli, non farà altro che indebolirli
ulteriormente.

20
3.2.1 LO STRETCHING GLOBALE ATTIVO
Diversamente da quello che prevede l'allungamento di un singolo
gruppo di muscoli (allungamento muscolare distrettuale), la
tecnica dello Stretching Globale Attivo (S.G.A.) si basa
sull'allungamento delle catene muscolari.
Tramite la fascia connettivale, i muscoli sono in realtà strutturati in
lunghe catene muscolari o meglio miofasciali. La lunghezza
(l'elasticità) di ogni singolo muscolo è strettamente legata a quella
di tutti i muscoli appartenenti alla stessa catena. Occorre
comunque sempre tener presente la stretta integrazione esistente
all'interno del sistema miofasciale e del nostro organismo; è
difficile isolare funzionalmente un organo o una struttura. Un
gruppo di muscoli in tensione esercita un'influenza su gli altri
muscoli vicini, sia per un fattore fisico-fasciale che nervoso
(F. Mezieres e T. W. Myers).
Così, ad esempio, allungando distrettualmente i muscoli posteriori
degli arti inferiori rischiamo di accorciare i muscoli della schiena
appartenenti alla stessa catena muscolare. Stessa cosa potrà
accadere allungando i muscoli della parte lombare a danno dei
21
muscoli della zona cervicale. L'allungamento delle intere catene
muscolo-fasciali corporee consente quindi una maggiore efficacia
ma, al tempo stesso, richiede un apprendimento e un'applicazione
precisa della tecnica.
La tecnica dello Stretching Globale Attivo consiste nel mantenere,
per alcuni minuti (in genere da 15 a 20 minuti) specifiche posture,
facendo attenzione a eliminare in maniera attiva tutti i compensi,
così da consentire l'allungamento stabile (deformazione elastica)
dell'intera catena muscolare interessata.
La complessità e l'incisività di questa metodologia richiede un
apprendimento guidato professionalmente prima di poterla
eseguire singolarmente.
Questa tecnica facilita il rinforzo dei muscoli antagonisti a quelli
allungati sia tramite l'attivazione degli organi muscolo-tendinei del
Golgi (per il meccanismo proprio del riflesso miotatico inverso) dei
muscoli allungati sia per il necessario utilizzo attivo dei muscoli
antagonisti nell'eliminazione dei compensi articolari che si
presentano durante l'esecuzione della tecnica di Stretching
Globale Attivo. Per tutte queste caratteristiche questo tipo di
22
allungamento muscolare viene anche definito Stretching Globale
Attivo “decompensato". Inoltre, essendo in grado di incidere
profondamente sull'intera postura, viene anche definito "stretching
posturale".
Lo Stretching globale attivo trae i suoi principi dalla Rieducazione
Posturale Globale. Uno dei principi fondamentali, sfruttati dallo
stretching globale attivo, è la globalità, che prevede, quindi,
l’interessamento di tutti i segmenti del corpo nello stesso
momento attraverso la realizzazione di particolari posizioni che
evolvono in maniera dolce e progressiva, con l’interessamento
della respirazione, verso una posizione finale di massimo
allungamento.
Vengono utilizzate nove posture, ognuna con la specificità di agire
su una serie determinata di “catene muscolari”. Nella pratica
sportiva, in alternativa allo stretching tradizionale, permette un
maggiore allungamento muscolare, controllato attivamente dal
soggetto con sequenze coordinate.
Sembra, inoltre, offrire una valida prevenzione contro le patologie
da sovraccarico muscolo-tendinee.

23
Non bisogna mai trattenere il respiro durante un esercizio di
allungamento. Lo scopo di una corretta respirazione è importante
perché una buona ossigenazione attenua lo stato di tensione
dell’atleta fino a portarlo ad uno stato di equilibrio delle sue
funzioni fisiologiche e quindi anche del tono muscolare.
La posizione deve permettere una corretta respirazione. Se la
posizione mantiene il muscolo in un’eccessiva tensione è
probabile che la respirazione diventi affannosa o difficoltosa, in
questo caso è importante diminuire la tensione finché la
respirazione non diventerà naturale.
In particolare nello Stretching Globale Attivo si dà molta
importanza all’espirazione, effettuata attraverso una contrazione
isotonica-eccentrica della catena muscolo-fasciale inspiratoria (
catena antero-inferiore) e coadiuvata dalla completa
rettilineizzazione del rachide, così da annullare la funzione
lordosizzante dei muscoli respiratori principali e secondari.

24
3.3 IL BIOFEEDBACK COME ESERCIZIO
POSTURALE
Da un punto di vista storico, il Biofeedback si sviluppò negli Stati
Uniti alla fine degli anni ’60, quando alcuni ricercatori (Miller,
Brener, Snyder e Noble e altri) dimostrarono che sia nell’animale
sia nell’uomo è possibile controllare alcuni parametri quali: la
frequenza cardiaca, i ritmi elettroencefalografici, la
vasocostrizione cutanea, etc.
Sperimentazioni sull’uso del Biofeedback (BF) visivo per il
controllo posturale sono in corso fin dagli anni ’70 (Hlavacka F.
and Litvinenkova V.) e, tradizionalmente, sono legate alla
visualizzazione su monitor della posizione del Centro di Pressione
del soggetto sotto esperimento.
Ad oggi alcuni sistemi commerciali finalizzati all’analisi
dell’equilibrio si avvantaggiano di questa lunga sperimentazione e
propongono il BF visivo come terapia riabilitativa o allenamento
sportivo (Chiari e altri. 2005).
L’importanza funzionale del segnale visivo per il controllo
posturale è da tempo risaputa: basti pensare alle difficoltà
25
osservabili in ciascun soggetto normale alla chiusura degli occhi.
Abbastanza complessa e dibattuta è stata invece l’individuazione
delle vie anatomiche e delle caratteristiche funzionali di questa
interazione (Guidetti, 1997).
La stimolazione visiva legata ai movimenti oculari volontari non
modifica in modo significativo il controllo posturale statico (Oblak,
Grgoric, 1985), mentre la visione di immagini in movimento
genera riassetti posturali più importanti (Clement, Joaquin, 1985)
e recentemente è stata evidenziata l’importanza delle informazioni
visive anche in condizioni dinamiche che richiedono riassetti
posturali rapidi.
Le afferenze osteo-articolari, miofasciali, visive, cutanee e
labirintiche devono cooperare strettamente per completare e
correggere l’analisi del rapporto tra il soggetto e l’ambiente e
permette risposte posturali adeguate (Guidetti, 1997).
Il Biofeedback training è una tecnica che usa il biofeedback per
insegnare al soggetto come controllare processi psicofisiologici
involontari mediante l’esercizio.
L’apparecchiatura di Biofeeedback raccoglie, amplifica e rimanda
al soggetto una serie di processi che avvengono nell’organismo.

26
Come uno specchio, l’apparecchiatura di Biofeedback fornisce un
riflesso corretto, cioè preciso ed utilizzabile. Tale strumento non
ha alcun potere proprio di determinare un cambiamento: solo la
persona che lo utilizza ha la facoltà di controllare l’andamento del
parametro fisiologico registrato, nel nostro caso lo spostamento
controllato del Centro di Pressione del corpo.
L’obbiettivo non è tanto quello di produrre uno stato particolare,
ma più propriamente quello di facilitare l’auto-consapevolezza ed
il controllo di alcuni parametri.

27
Capitolo 4
MATERIALI E METODI
4.1. LA STABILOMETRIA
La stabilometria è la
misura delle oscillazioni
del Centro di Pressione
del soggetto cioè del
punto di applicazione della
risultante delle forze in
gioco, rilevato a livello
della superficie d'appoggio
da una pedana di forza
(Dichgans et al., 1976)
(fig. 6).
(fig.6): Rapporti e correlazioni tra centro di massa e centro di pressione

28
Il Centro di Pressione (Centre Of Pressure = COP) si sposta
normalmente di qualche millimetro intorno ad una posizione
media (calcolata sull’arco di tempo in esame), in modo tale da
disegnare un immaginario gomitolo sul piano orizzontale.
In condizioni di stazione eretta tranquilla, questo punto
corrisponde grossomodo alla proiezione del centro di massa
(centre of mass = COM ) del corpo sul piano di appoggio
(Gurfinkel,1973).
Il punto si trova tra i due
piedi, un po’ al davanti dei
malleoli, e giace quindi
all’interno della base di
appoggio del corpo
(Schieppati et al., 1994)
(Fig. 7).
(Fig.7): Proiezione del centro di gravità nel
poligono di sostegno e postura normale sul
piano sagittale (Bricot)
29
Tipicamente tali variabili aumentano in condizioni di instabilità: si
dice che le oscillazioni del corpo aumentano (Diener e Dichgans,
1988).
Normalmente le oscillazioni aumentano chiudendo gli occhi, a
dimostrazione dell’esistenza e dell’ efficacia del feedback continuo
fornito dalla vista (Gagey, 1991).
Incrementi anormali delle oscillazioni si verificano in molte
condizioni patologiche, sia neurologiche che ortopediche (Horak,
2001; Nardone e Schieppati, 2004): evidentemente qualunque
disturbo della motricità non potrà che fare risentire i suoi effetti a
livello dell’unico punto in cui il corpo interagisce con il suo
ambiente, vale a dire a livello del suolo.
4.1.1. PEDANA STABILOMETRICA
La pedana stabilometrica è una basculla elettronica collegata ad
un computer che misura le posizioni successive del Centro di
Pressione del corpo. Il centro di pressione corrisponde al punto di
applicazione della somma delle forze di reazione che si
oppongono allo spostamento della piattaforma sotto l’effetto della
30
massa corporea e dei suoi piccoli movimenti (Gurfinkel,1973;
Hugon, 1999) e solo con una certa approssimazione corrisponde
alla proiezione del baricentro al suolo.
La pedana stabilometrica usata nello studio è una Lizard con
sistema software versione 3.0. ed è composta da due piattaforme
separate per l’appoggio dei due piedi. Le emipedane affiancate
permettono di valutare il baricentro generale in rapporto ai singoli
baricentri del piede destro e sinistro.
Ogni piattaforma è composta da una superficie rigida che poggia
a terra mediante tre piedini (per la determinazione del piano)
ognuno dei quali contiene una sfera d’acciaio che trasmette le
forze agli estensimetri (calibri di forze) presenti nella pedana.
I rilevatori sono delle celle di carico e contengono una parte che
ha la caratteristica di variare le proprie proprietà elettriche al
variare della tensione (estensimetro). La sfera d’acciaio preme
sulla cella che, deformandosi, determina lo stiramento
dell’estensimetro.
Le celle di carico ricevono una debole alimentazione elettrica
tramite la stimolazione ottica che crea nella parte ricevente un
segnale di tipo elettrico.

31
(Fig. 8): schema del processo di acquisizione ed elaborazione dei dati
durante l’esame stabilometrico
Essendo nota la corrente di alimentazione, il sistema è in grado di
misurare il carico applicato su ciascuna cella, misurando la
variazione della corrente in uscita da ciascuna di esse.
Il segnale in uscita, dopo essere stato amplificato, viene elaborato
dal computer che mostra i risultati dell’esame (Fig. 8) fornendone i
valori numerici e l’elaborazione grafica (Fig. 9).

32
(Fig. 9 ): videata di acquisizione dei dati durante l’esame. Rappresenta
la ripartizione dei carichi su calcagno, 1° e 5° me tatarso. I valori sono
rappresentati in Kg. Con il totale per arto e la differenza di carico. Il
colore e la direzione dei triangoli sono spiegati nella legenda a lato. Il
baricentro ideale è rappresentato dalla croce verde e i cerchi gialli
indicano la posizione del baricentro generale e dei due arti. Le linee
rosse e verdi informano immediatamente sull’ampiezza
dell’oscillazione.

33
La campionatura del segnale è effettuata 10 volte al secondo (10
Hz) per cui durante la registrazione standard, che dura 51,2
secondi, si avranno 512 campionature per ogni esame.
Per poter confrontare i risultati ottenuti, è indispensabile che la
registrazione sia “normalizzata”, cioè standardizzata: posizione
dei piedi, assenza di rumori ambientali, bocca ed occhi aperti o
chiusi.
Il successo della stabilometria è condizionato dal fatto che lo
stesso compito assegnato a soggetti diversi venga compreso allo
stesso modo ed induca lo stesso comportamento. In genere si
suggerisce al paziente di restare in piedi, rilassato, con le braccia
lungo il corpo e guardare in avanti, mirando con lo sguardo un
punto distante circa 4 – 5 metri alla stessa altezza della linea bi
pupillare senza fissarlo (Gagey, 2000).
Sia il primo esame (valutazione pre trattamento) che il secondo
(valutazione post trattamento) sono la media di tre prove
consecutive.
Durante ogni singola prova si chiedeva al soggetto di restare in
posizione eretta rilassato, con lo sguardo fisso su un punto, in
normo-occlusione dentale per circa un minuto (51,2 sec.).

34
Per ottenere dei valori affidabili è molto importante fare attenzione
al posizionamento del paziente sulla pedana. Ai soggetti è stato
chiesto di salire sulla pedana senza scarpe, i piedi sono stati
posizionati secondo le indicazioni dell’apparecchiatura, utilizzando
come punti di riferimento, il tallone, il II° metat arso e la proiezione
della perpendicolare del malleolo esterno sulla superficie delle
piastre, secondo le linee di riferimento disegnate sulle piastre
della pedana.
Sulle due piattaforme sono disegnati dei triangoli e delle linee di
riferimento. La radice del secondo dito (testa del secondo
metatarso) e la linea mediana del calcagno di ciascun piede
devono essere allineati con la linea verticale, mentre la
perpendicolare al malleolo esterno deve cadere sulla linea obliqua
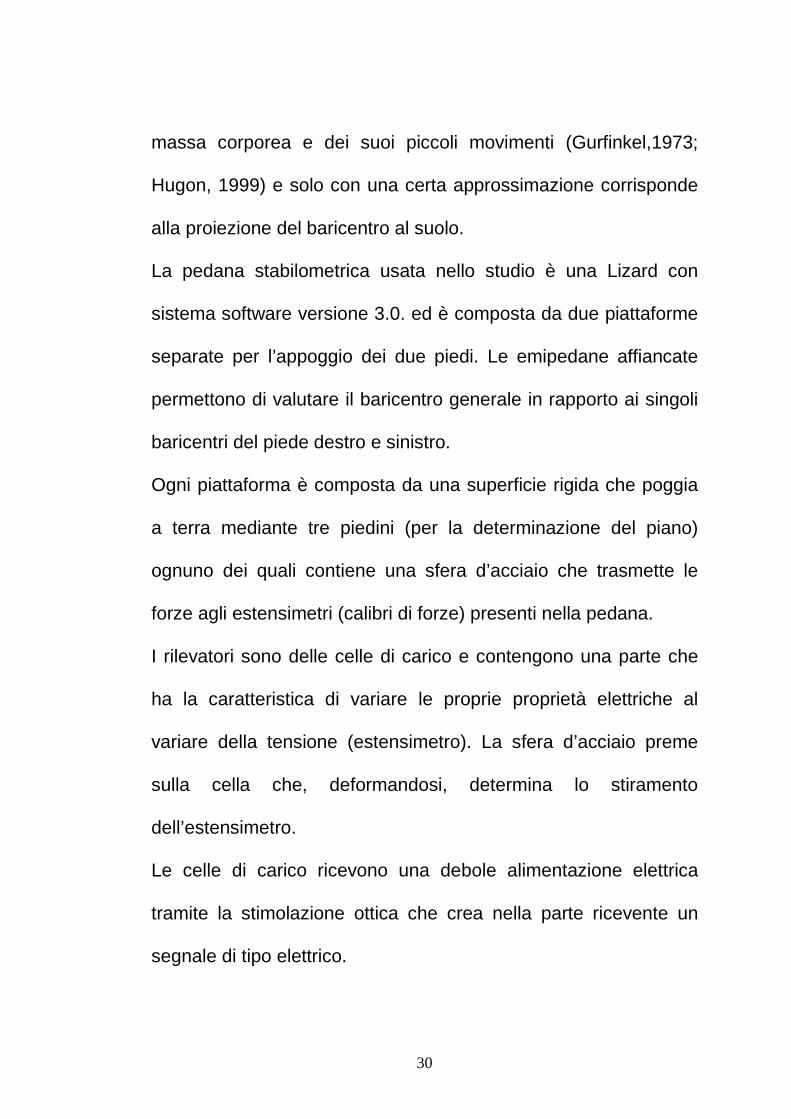
(Fig. 10).
35
(Fig.10): linee guida per il posizionamento del paziente
I carichi in situazioni ideali si leggono con valori perfettamente
identici perché in questa posizione le distanze dei punti di repere
anatomici dalle celle di rilevamento della pedana sono
proporzionali alle percentuali reali dei carichi, che sono: 1/6 per il
punto di appoggio esterno (V° metatarso), 2/6 per i l punto di
appoggio anteriore (I° metatarso) e 3/6 per il punt o di appoggio
posteriore (calcagno), secondo la distribuzione dei carichi di I. A.
Kapandji.

36
I carichi dati al 33% sono già condizionati da queste distanze e
dalla lunghezza del piede. Il piede, qualunque sia la sua misura è
posizionato in modo che il calcagno sia distante tre volte dal suo
rilevatore rispetto alle due volte dal I° metatarso e una volta dal V°
metatarso.
Per ottenere dei risultati attendibili e confrontabili è necessario,
pertanto, mantenere tali proporzioni, guidando il corretto
posizionamento dei piedi del soggetto sulle due piattaforme.
37
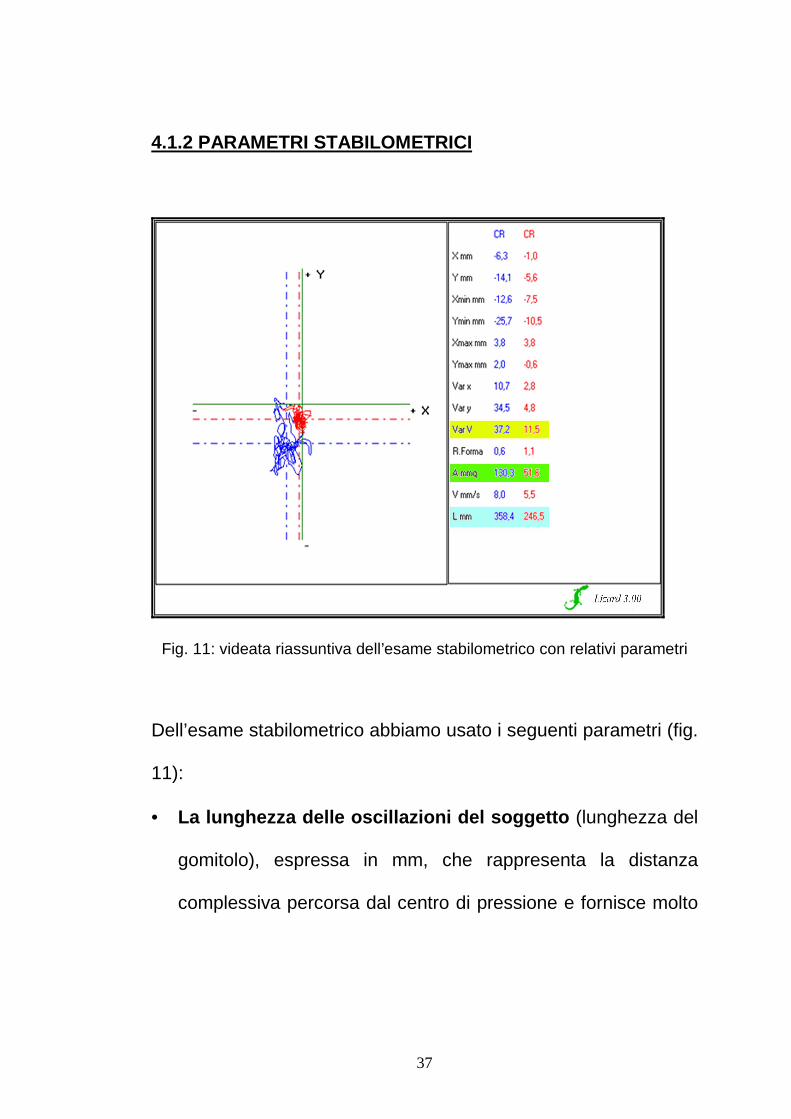
4.1.2 PARAMETRI STABILOMETRICI
Fig. 11: videata riassuntiva dell’esame stabilometrico con relativi parametri
Dell’esame stabilometrico abbiamo usato i seguenti parametri (fig.
11):
• La lunghezza delle oscillazioni del soggetto (lunghezza del
gomitolo), espressa in mm, che rappresenta la distanza
complessiva percorsa dal centro di pressione e fornisce molto

38
rapidamente una valutazione dell’energia spesa dal soggetto
per controllare la propria postura ortostatica (Vallier,1995).
• L’area del gomitolo , espressa in mmq, misura la dispersione
delle oscillazioni sul piano d'appoggio (Chiari et al., 2000). È la
superficie dell’ellisse di confidenza che contiene il 90% delle
posizioni campionate del centro di pressione( Takagi et al.,
1985). Esprime l’efficacia che ha il sistema posturale fine di
mantenere il centro di gravità vicino alla sua posizione media
di equilibrio. I valori di normalità sono da 50 mmq a 250 mmq
(Bertoldi, Burruano e altri); valori minori di 50 mmq possono
evidenziarsi in soggetti con accorciamento delle catene
muscolari, valori superiori a 250 mmq si osservano in soggetti
con problemi di controllo dell’equilibrio dovuto a problematiche
dei centri nervosi superiori.
• La varianza della velocità esprime il rapporto tra
accelerazioni e decelerazioni durante l’oscillazione. Più è alta,
maggiore è il disagio ed il dispendio energetico del paziente.
Più che il valore assoluto è interessante osservare se le
diverse condizioni di esame incrementano o diminuiscono
questo valore. È un indice del benessere perché indica la

39
presenza o meno dell’equilibrio tra i recettori del sistema
posturale. Un soggetto che si trova in equilibrio si sposta
lentamente ed avrà una varianza bassa, mentre uno che si
sposta a scatti avrà una varianza alta. Tutto ciò è legato alla
presenza o meno di armonia tra i suoi sistemi di controllo
posturale (Bertoldi, Burruano e altri).
La posturometria è la misura statistica della distribuzione del
carico del corpo sugli appoggi durante l’esame su pedana, i cui
parametri usati sono:
• Differenza tra i carichi podalici destri e sinistri : espressa
in percentuale del peso corporeo, si considera il 2% come
parametro di normalità.
• Angolazione teorica d’appoggio: esprime il grado medio
di rotazione del corpo, durante l’esame stabilometrico,
attraverso il campionamento dei valori pressori rilevati nei
tre punti di appoggio di ogni emipedana.
40
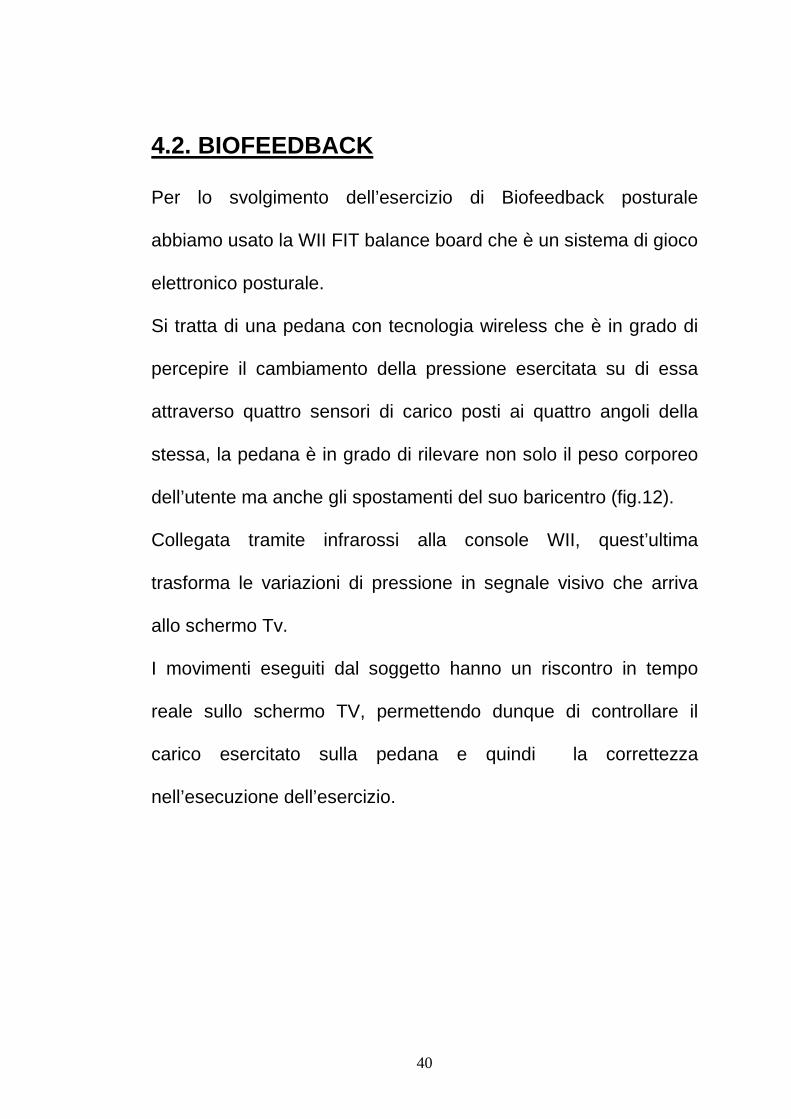
4.2. BIOFEEDBACK
Per lo svolgimento dell’esercizio di Biofeedback posturale
abbiamo usato la WII FIT balance board che è un sistema di gioco
elettronico posturale.
Si tratta di una pedana con tecnologia wireless che è in grado di
percepire il cambiamento della pressione esercitata su di essa
attraverso quattro sensori di carico posti ai quattro angoli della
stessa, la pedana è in grado di rilevare non solo il peso corporeo
dell’utente ma anche gli spostamenti del suo baricentro (fig.12).
Collegata tramite infrarossi alla console WII, quest’ultima
trasforma le variazioni di pressione in segnale visivo che arriva
allo schermo Tv.
I movimenti eseguiti dal soggetto hanno un riscontro in tempo
reale sullo schermo TV, permettendo dunque di controllare il
carico esercitato sulla pedana e quindi la correttezza
nell’esecuzione dell’esercizio.

41
(fig.12): pedana WII FIT balance board
Abbiamo deciso di utilizzare questo sistema di biofeedback
perché ha un aspetto ludico superiore ai classici programmi delle
pedane stabilometriche, perché economicamente parlando è
molto più accessibile e gestibile di altri sistemi biofeedback.

42
4.3. PROTOCOLLO DI LAVORO
Sono stati arruolati per lo studio 20 ragazzi tra i 14 e i 15 anni
praticanti attività sportiva agonistica (canottaggio) e sono stati
divisi casualmente in due gruppi di 10. I gruppi sono stati
normalizzati per sesso ed età.
Il 1° gruppo ha svolto come lavoro un esercizio di Stretching
Globale Attivo e il 2° gruppo ha eseguito un eserci zio di
Biofeedback posturale, entrambi della durata effettiva di 15 minuti.
Ogni soggetto ha una valutazione iniziale immediatamente prima
di effettuare il training posturale ed un valutazione finale
immeditamente dopo. Ogni valutazione è il risultato della media di
tre esami stabilometrici consecutivi.
Criteri di inclusione:
• Buono stato di salute generale;
• Assenza di dolori muscolo-scheletrici;
• Età compresa tra 14 e 15 anni.
• Sesso maschile.
Criteri di esclusione:
• Frattura da meno di 12 mesi;
• Interventi chirurgici, tatuaggi o incidenti da meno di 12 mesi.

43
4.4. ESERCIZIO DI STRETCHING GLOBALE
ATTIVO
4.4.1 POSIZIONE DI RANA AL SUOLO ( 5 MIN)
Partendo da una corretta posizione supina si arriva alla posizione
di rana al suolo con ginocchia flesse, anche abdotte e piante dei
piedi in contatto ed allungamento della catena muscolare
anteriore del braccio, effettuata appoggiando spalle, braccio,
avambraccio e dorso delle mani al suolo, in posizione di
extrarotazione (fig. 13).
Fig. 13 da: Lo Stretching Globale Attivo, Ph. E. Souchard
44
Il soggetto deve allineare il rachide, avvicinando il più possibile al
suolo il tratto lombare (con la contrazione concentrica del retto
addominale), le spalle e il tratto cervicale, coinvolgendo il tratto
superiore della catena muscolare posteriore.
La respirazione consigliata deve essere il più profonda e lenta
possibile, senza blocchi in inspirazione o in espirazione,
gonfiando l’addome durante l’inspirazione e sgonfiandolo durante
l’espirazione.
Lo scopo della respirazione in questa posizione è quello di
allungare la catena muscolare antero-inferiore e quella anteriore
del collo (tendine centrale che collega il rachide cervicale al
diaframma e all'asse viscerale), per mezzo di una contrazione
isotonica-eccentrica dei muscoli delle catene; infatti, attraverso il
mantenimento della rettilineizzazione del rachide, si annulla la
funzione lordosizzante dei muscoli respiratori principali e
secondari, fornendo loro un punto fisso necessario per
l’allungamento.
In particolare l’espirazione, effettuata contraendo il retto
addominale, ha il compito di mantenere il rachide allineato e

45
contribuire all’allungamento del diaframma e della catena
inspiratoria.
4.4.2. POSIZIONE DI RANA AL MURO (1 MIN)
Il soggetto si avvicina al muro appoggiandovi le tuberosità
ischiatiche e unendo le piante dei piedi (Fig 14).
Fig. 14 da: Lo Stretching Globale Attivo, Ph. E. Souchard
Con una spinta delle mani sulle ginocchia il soggetto avvicina il
più possibile gli arti inferiori al muro (Fig. 15). Tale spinta ha lo
scopo di coinvolgere muscoli adduttori dell’anca, iniziando così ad
allungare il tratto inferiore della catena muscolare posteriore.

46
Fig. 15 da: Lo Stretching Globale Attivo, Ph. E. Souchard
4.4.3. POSIZIONE INTERMEDIA DI ALLUNGAMENTO (3 MIN )
Mantenendo sempre i talloni uniti ed avvicinando le ginocchia il
soggetto inizia ad estendere gradualmente gli arti inferiori fino ad
una posizione tale da non provocare disagio (fig. 16); il guadagno
di movimento avviene sempre durante la fase di espirazione.
La respirazione continua ad essere rilassata e profonda; il
contatto del rachide al suolo deve essere sempre ricercato e
mantenuto.
Il soggetto rilassa i muscoli respiratori accessori (scaleni, SCOM)
e scapolo-toracici continuando ad effettuare una respirazione
addominale.

47
Fig.16 da: Lo Stretching Globale Attivo, Ph. E. Souchard
4.4.4. POSIZIONE FINALE DI ALLUNGAMENTO (6 MIN)
Allo scopo di agire sull’intera catena muscolare posteriore il
paziente estende gradualmente le ginocchia, ruota le anche in
leggera extrarotazione e pone le caviglie in flessione dorsale (Fig.
17); la graduale messa in tensione della catena muscolare
avviene sempre durante la fase espiratoria.
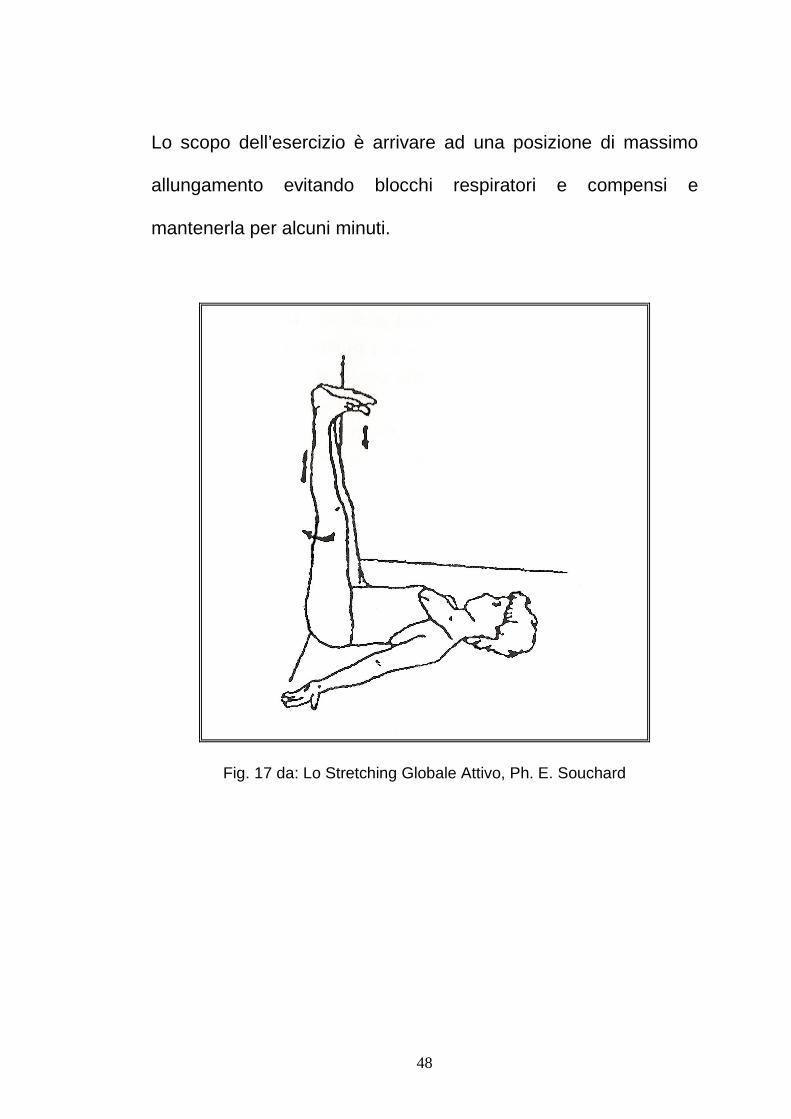
48
Lo scopo dell’esercizio è arrivare ad una posizione di massimo
allungamento evitando blocchi respiratori e compensi e
mantenerla per alcuni minuti.
Fig. 17 da: Lo Stretching Globale Attivo, Ph. E. Souchard

49
4.5. ESERCIZIO DI BIOFEEDBACK
POSTURALE
Una volta salito sulla bilancia elettronica WII FIT balance board il
soggetto deve spostare il proprio Centro di Pressione nelle quattro
direzioni con lo scopo di regolare l’inclinazione di un piano
basculante su cui sono poste delle palline.
Queste devono essere indirizzate all’interno di un foro presente
sulla superficie del piano (fig.18).
Fig. 18: videata di acquisizione dell’esercizio di Biofeedback

50
Ogni volta che il soggetto riesce a mandare tutte le palline
all’interno del foro entro un determinato tempo, passa al livello
successivo, in cui aumenta il numero di palline (fino ad un
massimo di otto) e la difficoltà relativa (Fig. 19).
Fig. 19: videata di acquisizione dell’esercizio di Biofeedback
Il soggetto deve evitare di far precipitare le palline dai bordi
modulando la pressione esercitata sulla pedana attraverso il
controllo del proprio Centro di Pressione.

51
Capitolo 5
RISULTATI
I dati raccolti sono stati elaborati con lo scopo di valutare le
eventuali modificazioni tra i valori misurati pre e post trattamento
sia intergruppo e che tra i due gruppi.
E’ stato utilizzato un valore di significatività statistica mediante test
“T di Student” con P < 0,05.
Risultati statisticamente significativi sono stati riscontrati nelle
differenze intergruppo riferibili alle percentuali dei carichi
podalici destro e sinistro (tabella 2 e grafico 1) e
all’angolazione teorica d’appoggio (tabella 3 e grafico 2). Per gli
altri parametri indagati non sono state evidenziate differenze
statisticamente significative.

52
DIFFERENZA % DEI CARICHI PODALICI DS/SN S.G.A. BIOFEEDBACK
PRE
TRATTAMENTO POST
TRATTAMENTO PRE
TRATTAMENTO POST
TRATTAMENTO Numerosità campione 10 10 10 10
Media 3,21 1,61 3,08 1,94 Dev. standard 1,50 1,15 1,38 0,93
t 2,66 2,16 gradi di libertà 18 18
P (livello di significatività) 0,0157 0,0445
Tabella 2. Differenza percentuale dei carichi podalici ds/sn
DIFFERENZA % DEI CARICHI PODALICI DS/SN
0
1
2
3
4
5
PRE POST
S.G.A.
Biofeedback
Grafico 1. Differenza % dei carichi podalici ds/sn
La tabella e il grafico illustrano la riduzione della media generale
della differenza di peso sui due arti da 3,2 % a 1,6% nel gruppo
S.G.A. (Stretching Globale Attivo) e dal 3,1 % al 1,9 % nel gruppo
biofeedback. Non sono risultati significativi i confronti tra i due
gruppi.
53
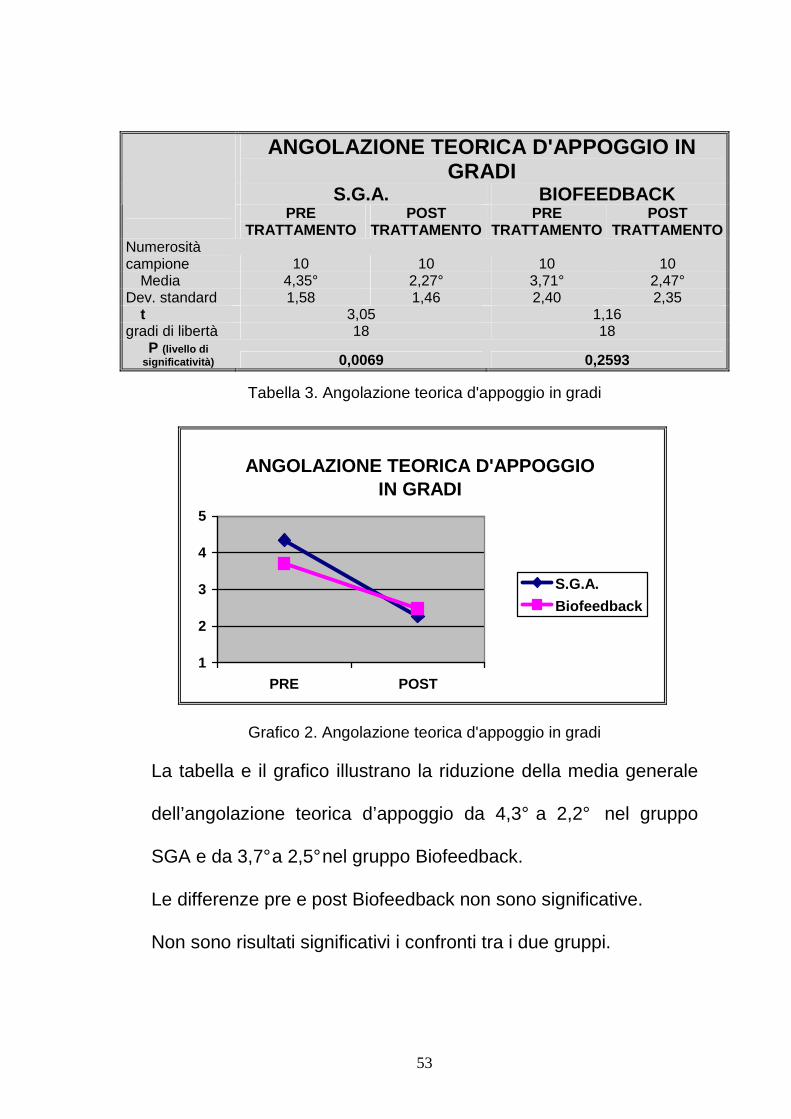
ANGOLAZIONE TEORICA D'APPOGGIO IN GRADI
S.G.A. BIOFEEDBACK
PRE
TRATTAMENTO POST
TRATTAMENTO PRE
TRATTAMENTO POST
TRATTAMENTO Numerosità campione 10 10 10 10
Media 4,35° 2,27° 3,71° 2,47° Dev. standard 1,58 1,46 2,40 2,35
t 3,05 1,16 gradi di libertà 18 18
P (livello di significatività) 0,0069 0,2593
Tabella 3. Angolazione teorica d'appoggio in gradi
ANGOLAZIONE TEORICA D'APPOGGIO IN GRADI
1
2
3
4
5
PRE POST
S.G.A.
Biofeedback
Grafico 2. Angolazione teorica d'appoggio in gradi
La tabella e il grafico illustrano la riduzione della media generale
dell’angolazione teorica d’appoggio da 4,3° a 2,2° nel gruppo
SGA e da 3,7° a 2,5° nel gruppo Biofeedback.
Le differenze pre e post Biofeedback non sono significative.
Non sono risultati significativi i confronti tra i due gruppi.
54
Capitolo 6
DISCUSSIONE E CONCLUSIONI
Nel primo gruppo di studio, in cui abbiamo lavorato principalmente
sulla sensibilizzazione propriocettiva e sul coinvolgimento
simmetrico delle strutture miofasciali attraverso lo Stretching
Globale Attivo, si è osservata sia la riduzione delle differenze di
appoggio tra carico destro e sinistro, sia la riduzione dell’angolo di
rotazione del corpo.
Nel secondo gruppo, in cui abbiamo lavorato sul controllo
dinamico del centro di pressione del corpo con esercizi di
biofeedback posturale, si è ridotta la differenza dei carichi tra gli
arti destro e sinistro, ma non si è ridotta significativamente la
rotazione teorica di appoggio.
I risultati ottenuti sono dovuti, secondo noi, ad un adattamento del
sistema tonico posturale alla stimolazione delle afferenze
propriocettive.
Osservando i dati raccolti non siamo in grado di indicare quale sia
il metodo più efficace: se è vero che entrambi i metodi hanno dato
55
risultati sovrapponibili è vero anche che il biofeedback
richiederebbe una valutazione aggiuntiva che permettesse lo
studio delle dinamiche di controllo del centro di pressione del
corpo e delle strategie anticipatorie a feedforward tipiche di uno
sport come il canottaggio. Il canottiere infatti deve essere in grado
di modificare la propria posizione nello spazio mantenendo un
corretto allineamento del corpo anche nel caso di improvvisi
cambiamenti dell’ambiente esterno (vento, sbilanciamento di un
compagno, etc) o in condizioni di perturbazioni prevedibili.
Vista la scarsa letteratura esistente su questo specifico
argomento non possiamo confrontare i risultati del nostro lavoro
con altri dati statistici e pertanto averne conferma o smentita.
In conclusione i metodi di lavoro utilizzati nel nostro studio
risultano favorevoli all’ottenimento di un’equilibrata distribuzione
del carico ponderale e ad un ottimale assetto rotatorio
dell’appoggio in stazione eretta, anche se sono viziati da alcuni
limiti metodologici, tra cui la scarsità della casistica e l’assenza di
un follow up.
Infine possiamo ipotizzare che i risultati ottenibili mediante
l‘utilizzo dei due metodi di lavoro abbiano un valore preventivo

56
contro gli infortuni nella pratica agonistica del canottaggio
favorendo una migliore performance sportiva.

57
B I B L I O G R A F I A
1. Bricot B. La Riprogrammazione Posturale Globale,
Statipro, 1998.
2. Chiari L, Cappello A, Lenzi D, Della Croce U. An
improved technique for the extraction of stochastic
parameters from stabilograms. Gait Posture 2000; 12: 225-
34.
3. Chong RK, Horak FB, Frank J, Kaye J. Sensory
organization for balance: specific deficits in Alzheimer's but
not in Parkinson's disease. J Gerontol A Biol Sci Med Sci.
1999; 54:M122-8
4. Clement G., Jaquin T., Berthoz A. Habituation of postural
readjustments induced by motion of visual scenes. In:
Ingarashi M., Black F.O.,: Vestibular and visual controlon
posture and locomotor equilibrium, 1985, 99.
5. Corna S., Grasso M., Nardone A. & Schieppati M.
Selective depression of medium-latency leg and foot muscle

58
responses to stretch by an a2 agonist in humans. J. Physiol
(Lond.) 1995; 484: 803-809.
6. Corna S, Tarantola J, Nardone A, Giordano A,
Schieppati M. Standing on a continuously moving platform:
is body inertia counteracted or exploited? Exp. Brain Res
1999; 124: 331-341.
7. Corna S, Nardone A, Prestinari A, Galante M, Grasso M,
Schieppati M. Balance rehabilitation in patients affected by
instability of vestibular origin:comparison of conventional
and instrumental training. A rch Phys Med Rehabil 2003; 84:
1173-84.
8. Dichgans J, Mauritz KH, Allum JH, Brandt T . Postural
sway in normals and atactic patients: analysis of the
stabilising and destabilizing effects of vision. A g ressologie
1976; 17: 15-24.
9. Diener HC, Dichgans J. On the role of vestibular, visual
and somatosensory information for dynamic postural control
in humans. P rog Brain Res 1988; 76: 253-62.
10. Elble RJ, Moody C, Leffler K, Sinha R. The initiation of
normal walking. Mov Disord 1994; 9:139-46.

59
11. Era P, Avlund K., Jokela J., Gause-Nilson I., Heikk inen
E., Steen B., Schroll M. Postural balance and self-reported
functional ability in 75-year-old men and women: a cross-
national comparative study. Journal Am. Geriatr.Soc.1997
Jan; 45(1):21-9.
12. Era P, Heikkinen E. Postural sway during standing and
unexpected disturbance of balance in random samples of
men of diff e rent ages. J Gerontol 1985; 40: 287-95.
13. Gagey PM. Posturologia, regolazione e perturbazioni della
stazione eretta, Marrapese Editore, 2000
14. Gagey PM. Visual contribution to the postural system: a
clinical approach to the study of vision. A g ressologie 1991;
32: 183-6.
15. Gantchev N, Viallet F, Aurenty R, Massion J. Impairment
of posturo-kinetic co-ordination during initiation of forward
oriented stepping movements in parkinsonian patients.
16. Electroencephalogr Clin Neurophysiol. 1996; 101: 110-20.
17. Guidetti G. Diagnosi e terapia dei disturbi dell’equilibrio,
Editore Marrapese, 1997.

60
18. Gurfinkel VS. Muscle afferentation and postural control in
man. Agressologie 1973; 14: 1-8.
19. Hlavacka F, Litvinenkova V. First derivative of the
stabilogram and posture control in visual feed-back
conditions in man. Agressologie. 1973 Sep;14:45-9.
20. Horak FB, Shupert CL, Mirka A. Components of postural
dyscontrol in the elderly: a review. Neurobiol Aging 1989;10:
727-38.
21. Kapandji I.A. Fisiologia articolare, Vol. 2 Arto Inferiore,
Monduzzi Editore, 2006; 228-35.
22. Litvinenkova V, Baron JB. Postural tonal activity and the
visual apparatus.C R Seances Soc Biol Fil.
1968;162(12):2098-103
23. Litvinenkova V, Hlavacka F. The visual feed-back gain
influence upon the regulation of the upright posture in man.
Agressologie. 1973 Sep;14(Spec No C):95-9.
24. Litvinenkova V, Baron JB. Variations of postural
regulation as a function of visual and oculomotor
information. C R Seances Soc Biol Fil. 1969 Feb
8;162(7):1294-9

61
25. Massion J. Movement, posture and equilibrium: interaction
and coordination. Prog Neurobiol. 1992; 38: 35-56.
26. Massion J, Alexandrov A, Frolov A. Why and how are
posture and movement coordinated? Prog Brain Res 2004;
143: 13-27.
27. Nardone A, Giordano, A, Corrà T, Schieppati M.
Responses of leg muscles in humans displaced while
standing. Effects of types of perturbation and of postural set.
Brain 1990; 113: 65-84.
28. Nardone A, Godi M., Grasso M., Guglielmetti S.,
Schieppati M. Stabilometry is a predictor of gait
performance in chronic hemiparetic stroke patients. Gait
Posture, 2009 Jul; 0(1): 5-10.
29. Nardone A, Grasso M, Tarantola J, Corna S, Schieppa ti
M. Postural coordination in elderly subjects on a periodically
moving platform. Arch Phys Med Rehabil. 2000; 81: 1217-
1223
30. Nardone A, Schieppati M. Group II spindle fibres and
afferent control of stance. Clues from diabetic neuropathy.
Clin Neurophysiol. 2004; 115: 779-89.

62
31. Oblak B., Gregoric M., Gyergyek L. Effects of voluntary
eye saccades on body sway. In: Ingarashi M., Black F.O.,:
Vestibular and visual controlon posture and locomotor
equilibrium, 1985, 122.
32. Schieppati M, Nardone A. Free and supported stance in
Parkinson's disease. The effect of posture and 'postural set'
on leg muscle responses to perturbation, and its relation to
the severity of the disease. Brain 1991; 114: 1227-44.
33. Schieppati M, Hugon M, Grasso M, Nardone A, Galante
M. The limits of equilibrium in young and elderly normal
subjects and in parkinsonians. Electroencephalogr Clin
Neurophysiol 1994; 93:286-98.
34. Schieppati M, Tacchini E, Nardone A, Tarantola J,
Corna S. Subjective perception of body sway. J. Neurol.
Neurosurg. Psychiat. 1999; 66: 313-322.
35. Schieppati M, Giordano A, Nardone A. Variability in a
dynamic postural task attests ample flexibility in balance
control mechanisms. Exp Brain Res 2002; 144: 200-10.

63
36. Souchard P.E. Lo stretching globale attivo, la rieducazione
posturale globale al servizio dello sport, Editore Marrapese,
2003.
37. Souchard P.E. Basi del Metodo di Rieducazione Posturale
Globale, il campo chiuso, Editore Marrapese, 1994.
38. Souchard P.E. Il diaframma, Anatomia-Biomeccanica-
Bioenergetica-Patologia-Approccio Terapeutico, Editore
Marrapese, 1995.
39. Souchard P.E. Le auto posture respiratorie, Editore
Marrapese, 1994.
40. Souchard P.E. La respirazione, Editore Marrapese, 1988.
41. Winter DA. Biomechanics of normal and pathological gait:
implications for understanding human locomotor control. J
Mot Behav 1989; 21: 337-55.