第14章 超静定系统read.pudn.com/downloads83/doc/fileformat/321491/11565%20%B9%A4%B3%C… ·...
24
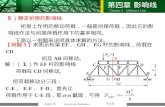
* 第 14 章 超静定系统 教学提示:求解超静定问题首先要识别超静定结构,然后转化为基本静定系统 用能 量法求解超静定问题具有普遍意义,它能求解一类超静定结构的受力问题 这里使用力法 中的正则方程求解,使求解问题规范化 教学要求:理解静不定结构的静不定次数的确定 重点掌握正则方程式与正则方程组 中各系数的计算 了解对称结构的对称变形与反对称变形基本概念 掌握对称结构的对称 变形与反对称变形性质的利用,使问题简化 初步掌握连续梁静不定次数的判定、三弯矩 方程组的建立及其解法 14.1 概 述 静不定结构也称为超静定结构,和相应的静定结构相比,具有强度高、刚度大的优点, 因此工程实际中的结构大多是静不定结构。本章主要介绍静不定结构的定义、静不定次数 的判断以及静不定结构的求解方法,重点介绍用力法求解静不定结构。首先对超静定结构 作全面的讨论。 A B (a) (b) 刚架结构 (c) 混合结构 (d) 连续梁 图 14.1 1. 平面杆系 由直杆以铰结点相连接组成杆系,若载荷只作用于结点上,则每一杆件只承受拉伸或 压缩,这种杆系称为桁架[见图 14.1(a)]。若直杆以刚结点相连接组成杆系在载荷作用下,
Transcript of 第14章 超静定系统read.pudn.com/downloads83/doc/fileformat/321491/11565%20%B9%A4%B3%C… ·...

*第 14 章 超静定系统
教学提示:求解超静定问题首先要识别超静定结构,然后转化为基本静定系统。用能
量法求解超静定问题具有普遍意义,它能求解一类超静定结构的受力问题。这里使用力法
中的正则方程求解,使求解问题规范化。
教学要求:理解静不定结构的静不定次数的确定。重点掌握正则方程式与正则方程组
中各系数的计算。了解对称结构的对称变形与反对称变形基本概念。掌握对称结构的对称
变形与反对称变形性质的利用,使问题简化。初步掌握连续梁静不定次数的判定、三弯矩
方程组的建立及其解法。
14.1 概 述
静不定结构也称为超静定结构,和相应的静定结构相比,具有强度高、刚度大的优点,
因此工程实际中的结构大多是静不定结构。本章主要介绍静不定结构的定义、静不定次数
的判断以及静不定结构的求解方法,重点介绍用力法求解静不定结构。首先对超静定结构
作全面的讨论。
A
B
(a) (b) 刚架结构 (c) 混合结构
(d) 连续梁
图 14.1
1. 平面杆系
由直杆以铰结点相连接组成杆系,若载荷只作用于结点上,则每一杆件只承受拉伸或
压缩,这种杆系称为桁架[见图 14.1(a)]。若直杆以刚结点相连接组成杆系在载荷作用下,

第 14章 超静定系统
·225·
·225·
各杆可以承受拉、压、弯曲和扭转,这样的杆系称为刚架[见图 14.1(b)]。至于如图 14.1(d)所示杆系是连续跨过若干支座的梁通常称为连续梁。图 14.1杆系各杆的轴线在同一平面内,且它就是各杆的形心主惯性平面;同时,外力也都作用于这一平面内。这种杆系称为平面
杆系。后面的讨论以平面杆系为主。
2. 外超静定和内超静定
以往讨论的超静定结构,多数是支座反力不能全由平衡方程求出的情况,这种超静定
结构称为外静不定,如图 14.1(b)和图 14.1(d)所示就是这种超静定结构。至于如图 14.1(a)和图 14.1(c)所示结构虽支座反力可由静力平衡方程确定,但杆件的内力却不能全部由平衡方程求出,仍然是超静定结构,这种超静定结构称为外静不定。与此相反,静定结构的支
座反力和内力由平衡方程,并利用截面法,便可全部确定。
3.超静定结构的多余约束
静定结构除了变形外没有可运动的自由度。 如图 14.2(a)和图 14.2(b)所示静定梁各有三个反力,使梁只可能有变形引起的位移,在
xy平面内任何刚性位移或转动都是不可能的。这样的结构称为几何不变或运动学不变的结构。上述三个反力所代表的约束都是保持结构几何不变所必需的。例如解除简支梁的右端
铰支座;或解除悬臂梁固定端对转动的约束使之变为铰支座,这两种情况都将使梁变成如
图 14.2(c)所示机构,它可绕左端铰链 A转动,是几何可变的。
(a)
(b)
A
(c)
图 14.2
与静定结构不同,超静定结构的一些支座往往并不是维持几何不变所必需的。例如解
除如图 14.1(b)所示刚架的支座 B,它仍然是几何不变的结构。因此把这类约束称为多余约束。与多余约束对应的约束力就称为多余约束力
结构的支座或支座反力是结构的外部约束。现在从静定与超静定结构的比较来讨论内
部约束。如图 14.3(a)所示是一个静定刚架,切口两侧的 A、B 两截面可以有相对的位移和转动。如用铰链将 A、B连接[见图 14.3(b)],这就限制了 A、B两截面沿垂直和水平两个方向的相对位移,构成结构的内部约束,相当于增加了两对内部约束力,如图 14.3(c)所示。推广开来,如把刚架上面的两根杆件改成连为一体的一根杆件[见图 14.3(d)],这就约束了 A、B两截面的相对转动和位移,等于增加了三对内部约束力[见图 14.3(e)]。

工程力学(下册)
·226·
·226·
A B A B A B
A B
(b) (c)
(d)
(a)
(e)
图 14.3
4.基本静定结构
另一方面在解题时需将超静定系统变化为静定系统。解除超静定结构的某些约束后,
可以把它变为静定结构。如解除如图 14.4(a)所示超静定结构的支座 C,并将截面 D切开,便成为如图 14.4(b)所示静定结构。解除支座 C相当于解除了一个外部约束,切开截面 D又等于解除了三个内部约束。可见相当于解除了四个约束。或者说,与相应的静定结构相比,
如图 11.4(a)所示超静定结构多出四个约束,称为四次超静定结构。又如在图 14.l(a)中,把桁架的任一根杆件切开,就成为静定结构。桁架各杆只承受拉伸或压缩,切开一根杆件只
相当于解除一个内部约束,所以它是一次超静定结构。
D
(b)
(a)
C
C
图 14.4
解除超静定结构的某些约束后得到的静定结构,称为原超定结构的基本静定系或静定
基。图 14.4(b)所示的静定结构就是图 14.4(a)所示超静定结构的基本静定系。基本静定系可以有不同的选择,不是唯一的。图 14.5(a)所示刚架有两个多余约束,是二次超静定梁。可以解除固定铰支座得到由图 14.5(b)所示的基本静定系。也可将刚架的固定端除去,并装上移动铰链就得到如图 14.5(c)所示的基本静定系。在基本静定系上,除原有载荷外,还应该用相应的多余约束力代替被解除的多余约束,这就得到图 14.5(b)或图 14.5(c)所示的基本静定系。有时把载荷和多余约束力作用下的基本静定系称为相当系统。

第 14章 超静定系统
·227·
·227·
(c) 基本静定系统 (b) 基本静定系统(a) 原系统
图 14.5
基本静定系统基选取可遵循的原则: (1) 基本静定系统基必须能维持静力平衡,且为几何不变系统。 (2) 基本静定系统要便于计算,即要有利于建立变形协调条件。一般来说,求解变形
时,悬臂梁最为简单,其次是简支梁,最后为外伸梁。
5.超静定次数的确定
(1) 根据结构约束性质可确定内、外约束力总数。内、外约束力总数与独立静力平衡方程总数之差即为超静定结构的超静定次数。
(2) 外超静定次数的判断:根据结构与受力性质,确定其是空间或是平面承载结构,即可确定全部约束的个数。根据作用力的类型,可确定独立平衡方程数,二者之差为超静
定次数。如图 14.7(b)所示,外载荷为平面力系,则为三次外超静定系,而图 14.7(c)为空间力系,则为六次外超静定。
(3) 内超静定次数的确定。 桁架:直杆用铰链相连接,载荷只作用于结点,杆只受拉压力的杆系,其基本几何不变
系由三杆组成[见图 14.6(a)]。而图 14.6(b)仍由基本不变系扩展而成,仍是静定系,而图 14.6(c)由于在基本系中增加了一约束杆,因而为一次超静定。 刚架:杆以刚结点相连接,各杆可以承受拉、压、弯曲和扭转,这样的杆系为平面刚
架(图 14.7)。对于闭口框架,则需用截面法切开一个切口使其变为静定结构(几何不变可承载结构),其截面上作为平面受力结构[见图 14.7(b)],出现三个内力(轴向力 NF ,弯矩M ,剪切力 SF ),为三次超静定,而对于空间受力结构[见图 14.7(c)]则为六次超静定。对于大型结
构,若为平面问题,则每增加一个闭合框架,结构超静定次数便增加三次,而一个平面受
力闭合圆环与之类似,也是三次超静定。
(a) (b) (c)
图 14.6

工程力学(下册)
·228·
·228·
(b) (a) (c)
图 14.7
(a) (b)
图 14.8
(4) 混合超静定次数的确定。 先判断外超静定次数,后判断内超静定次数,二者之和为结构超静定次数。
14.2 用力法求解静不定结构
求解静不定结构的方法一般有两种方法:力法和位移法。 力法:以多余约束力为基本未知量,将变形或位移表示为未知力的函数,通过变形协
调条件作为补充方程来求解未知约束力,这种方法称为力法,又叫柔度法。 位移法:以结点位移作为基本未知量,将力通过结构关系表示成位移的函数。通过结
点平衡条件,解出未知量,这种方法称为位移法,又叫刚度法。 本文使用力法,不涉及位移法。
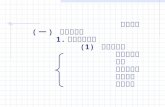
【例 14.1】 如图 14.9(a)所示是车削工件安有尾顶针的简化模型。这是一次静不定,解除B端约束成悬臂梁(静定基,亦可解除左端转动约束,简化为简支梁),B端加上多余约束支座反力为 1X 及外载荷 F 成相当系统[见图 14.9(b)]。现求解相当系统中的未知多余约束反力 1X 。
l
a F
BCA
(a) (b)
BCA
F
1PΔ
(c)
B
C A
F
(d)
A
B
1X
1XΔ
1 A
B 11δ
(e)
图 14.9
F

第 14章 超静定系统
·229·
·229·
解:在 F , 1X 作用下,悬臂梁的 B端位移为
11 1 1F XΔ Δ Δ= + 其中, 1FΔ 是由于 C 处作用有外载 F 引起的 B 点在 1X 方向的位移[见图 14.9(c)],而
11XΔ 是
支反力 1X 引起的 B 点在 1X 方向的位移[见图 14.9(d)]。因原系统 B 端是铰支座,在 1X 方向
上不应有位移,与原系统比较知相当系统的 B点的位移应为零,故
11 1 1 0Δ Δ Δ= + =F X (14-1)
这就是变形几何方程或协调方程,为了得到一个补充方程(补充独立平衡方程不足),在计
算11XΔ 时,可在静定基上沿 1X 方向作用单位力[见图 14.9(e)],B点沿 1X 方向单位力引起的
位移为 11δ ,对线弹性结构应有
11 11 1X XΔ δ=
代入式(14-1)有
11 1 1 0FXδ Δ+ = (14-2) 表达式(14-2)就称为正则方程,其中, 11δ 与 1FΔ 可用莫尔积分或其他方法求得。
3
11 3lEI
δ = , ( )2
1 36F
Fa l aEI
Δ = − −
代入协调方程式(14-2)可解得
( )2
1 33
2FaX l a
l= −
求得 1X 后,则可解出相当系统所有内力、位移。此相当系统的解即原系统的解。
现在来总结一下解题步骤: (1) 分析超静定结构,画出基本静定系图,如图 14.9(b)所示。 (2) 在静定基上分别画出已知力受力图,如图 14.9(c)所示;与未知力方向对应的单位
力图,如图 14.9(e)所示。 (3) 计算 11δ 、 1Δ F。 (4) 求解 11 1 1 0δ Δ+ =FX 得未知的约束反力 1X 。
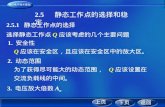
【例 14.2】 刚架尺寸及受力如图 14.10(a)所示,若 F、EI均为已知,试画刚架弯矩图。 解:(1) 基本静定系如图 14.10(b)所示。
(2) 正则方程: 11 1 1 0FXδ Δ+ = 。
(3) 计算 11δ 和 1FΔ 。
BC段: ( ) ( )21 1 1 1
12
M x qx M x x= − =
AC段: ( ) ( )2 2 2 212
M x qax M x x= − = 3
2 2 2 211 1 1 2 2 1 1 2 20 0 0 0
1 1 2( )d ( )d d d3
a a a a aM x x M x x x x x xEI EI EI
δ ⎡ ⎤ ⎡ ⎤= + = + =⎣ ⎦ ⎣ ⎦∫ ∫ ∫ ∫
1 1 1 1 2 2 20 0
1 ( ) ( )d ( ) ( )da aM x M x x M x M x xEI
Δ ⎡ ⎤= +⎣ ⎦∫ ∫
3 21 1 2 20 0
1 1 1d d2 2
⎡ ⎤= − + −⎢ ⎥⎣ ⎦∫ ∫a a
qx x qax xEI

工程力学(下册)
·230·
·230·
4724
qaEI
= −
11
11
7 ( )16
FX qaδΔ= − = ↑
a
a
A
B C
q
(a) A
BC
q
(b)
X1
A
BC
(d)
1
1
1
1A
B C
q
(c)
qa
qa/2
qa/2
x2
x1x1
x2
+
+
+
+
图 14.10
(4) 画弯矩图。 画弯矩图如下所示。
图 14 10( )
a
a
A
BC
q
(a)
716
a
A
B C
249512
qa
(b)
2
16qa2
16qa
【例 14.3】 桁架尺寸、受力如图 14.11(a)所示,若 F、EA均为已知,试求各杆的内力。 解:(1)基本静定系如图 14.11(b)所示。
(2) 正则方程: 11 1 1 0δ Δ+ =FX 。
(3) 计算 11δ 和 1FΔ 。

第 14章 超静定系统
·231·
·231·
11
2lEI
δ =
1FFlEA
Δ =
1 2FX = −
F 45° 45°
l
l l
(a)
② ① F 45° 45°
X1
(b)
X1
F 45° 45°
(c)
1
(d)
1
③
图 14.11
杆号 NiF NiF il N Ni i iF F l N Ni i iF F l
1 2F 1
2 l 2
F l 2l
2 2F 1
2 l 2
F l 2l
3 0 1 l 0 l
【例 14.4】 梁抗弯度 EI,杆拉压刚度 EA为已知, 2 10I Aa= ,计算截面 C的挠度 cw 。
解:这里为了说明方便,将图 14.12中杆件编号为①②③,AB为梁。 (1) 基本静定系如图 14.12(b)所示。 (2) 正则方程: 11 1 1Δ 0FXδ + = 。
(3) 计算 11δ 和 1Δ F。

工程力学(下册)
·232·
·232·
(b)
A a
D
F
C B a
60o 60o
X1
D
F
C B
X1
A
D
F
C B A
1
D
C B
1
A
(d)(c)
(a)
② ③ ①
+
+ + + +
图 14.12
12FM x= , 1
12
M x= , N1 1F = , N2 1= −F , N3 1F = −
3
1 1 1 10
2 1 d2 2 6
Δ = ⋅ =∫a
FF Fax x x
EI EI
11 1 1 10
2 1 1 1 2 2d 1 1 ( 1) ( 1) ( 1) ( 1)2 2 3 3 3
a a a ax x xEI EA
δ ⎡ ⎤= ⋅ + ⋅ ⋅ + − ⋅ − ⋅ + − ⋅ − ⋅⎢ ⎥⎣ ⎦∫
3 35 (1 3)6 63
= + = +a a aEI EIEA
因为 2
10AaI =
所以 11 3
21 3FX F−= − =
+
(4) 计算截面 C的挠度。 在静定基上 C点加一单位力,则
( ) 02xM x x a= ≤ ≤
由于杆 1已断开 N1 N2 N3 0F F F= = =
( ) ( ) ( )N10 0
2 2 1d d2 2
a a
cxw M x M x x F F x x
EI EI= = +∫ ∫
( ) ( ) 33N1
3 3
6 12
FaF F aEI EI
−+= =
( ) 3 34
M x Fx−= ; N11 3
2F F−=
N2 N33 12
F F F−= =

第 14章 超静定系统
·233·
·233·
若不断开杆 1 ( ) 3 34
M x x−= ; N11 3
2F −=
N2 N33 12
F F F−= =
( )2 2 2
2
0
3 32 1 3 2 3 1 2d4 2 23 3
a
cF a F aw Fx x
EI EA EA
− ⎛ ⎞ ⎛ ⎞− −= + ⋅ +⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
∫
( ) 33 3
12Fa
EI
−=
梁中点受力 ( )N11 3 32 2
F F F−+ =
直接用简支梁的公式 ( )3
3
3 3 2 3 3248 12c
F aw Fa
EI EI
− ⋅ −= =
可将上述思想推广到 n 次静不定系统,如解除 n 个多余约束后的未知多余约束力为
( )1,2, ,jX j n= L ,它们将引起 iX 作用点的相应的位移为1
n
ijj=
Δ∑ ,而原系统由于
( 1, , )jx j n= L 与外载荷共同作用对此位移限制为零(或已知),故有
11 1 12 2 1 1
21 1 22 2 2 2
1 1 2 2
00
0
n n F
n n F
n n nn n nF
X X XX X X
X X X
δ δ δ Δδ δ δ Δ
δ δ δ Δ
+ + ⋅ ⋅ ⋅ + + =⎧⎪ + + ⋅ ⋅ ⋅ + + =⎪⎨⎪⎪ + + ⋅ ⋅ ⋅ + + =⎩
M (14-3)
根据位移互等定理有
ij jiδ δ= (14-4)
ijδ 称为柔度因数,是 1jX = 引起的 iX 作用点 iX 方向上的位移; iFΔ 是外载荷引起的 iX
处的相应位移。式(14-3)称为静不定力法正则方程,它们是对应于 n 个多余未知力 iX 的变
形协调条件,是求解静不定问题的补充方程。 下面以图 14.13为例说明各因数的物理意义。
(a)
q
X1
X2
X3
q
a
a
C B
A (b)
q
(c)
2FΔ
3FΔ
1FΔ

工程力学(下册)
·234·
·234·
(e)(d)
1
11δ21δ
31δ
1
12δ22δ
32δ
(f)
1
13δ23δ
33δ
图 14.13
【例 14.5】 如图 14.14(a)所示为一静不定刚架,设刚架 EI 相同,求支座反力。
(a)
q
x1 x 2
q
X1
X2
X3
q
a
a
C B
A (b) (c)
(d) (e) (f)
x1 x 2
1
x1 x 2
1
x1 x 2
1
图 14.14
解:如图 14.14(a)所示为三次静不定结构,解除 B端约束,代之以多余约束反力 1X , 2X ,
3X ,图 14.14(b)为相当系统,按式(12-3), ijδ 、 iPΔ 均可用莫尔定理计算,即有 2 42
1 20
1 d2 6
Δ = − = −∫a
Pqx qaa x
EI EI
2 42
2 2 20
1 d2 8
Δ = − = −∫a
Pqx qax x
EI EI
2 32
3 20
1 1 d2 6
Δ = − ⋅ ⋅ = −∫a
Pqx qax
EI EI
3
11 1 1 10 0
1 1 4d 1 1 d3
δ = ⋅ + ⋅ ⋅ =∫ ∫a a ax x x x
EI EI EI
3
22 2 2 20
1 d3
δ = ⋅ =∫a ax x x
EI EI
33 10 0
1 1 21 1 d 1 1 dδ = ⋅ ⋅ + ⋅ ⋅ =∫ ∫a a ax x
EI EI EI

第 14章 超静定系统
·235·
·235·
3
12 21 2 20
1 d2
δ δ= = ⋅ =∫a ax a x
EI EI
2
13 31 1 1 20 0
1 1 31 d 1 d2
δ δ= = ⋅ ⋅ + ⋅ ⋅ =∫ ∫a l ax x a x
EI EI EI
2
23 32 2 20
1 d2
δ δ= = ⋅ =∫a ax x x
EI EI
将以上值代入式(14-3),整理后得 2
1 2 38 3 9aX aX X qa+ + =
21 2 312 8 12 3aX aX X qa+ + =
21 2 39 3 12aX aX X qa+ + =
解此联立方程,求出
1 16qaX = − , 2
716qaX = ,
2
3 48qaX =
其中,负号表示 1X 与所设方向相反,应向下。求出多余约束力,即求出了支座 B的支座反
力,进一步即可作出内力图。
14.3 对称及对称性质的利用
利用结构上载荷的对称或反对称性可使正则方程得到一些简化。 结构几何尺寸、形状、构件材料及约束条件均对称于某一轴,则称此结构为对称结构[见
图 14.15(a)]。 当在对称结构上受力也对称于结构对称轴,则此结构将产生对称变形[见图 14.15(b)]。
如外力反对称于结构对称轴,则结构将产生反对称变形[见图 14.15(c)]。与此相似,杆件的内力也可分成对称和反对称的。例如平面结构的杆件的横截面上一般有剪切力、弯矩和轴
向力即三个内力(见图 14.16)。对所考察的截面来说弯矩 M 和轴向力 NF 是对称的内力,剪
切力 SF 则是反对称的内力。
(a)
Me
c c对
称
轴
EI EI
(b) (c)
b
Me
b
MeMe
a a
图 14.15

工程力学(下册)
·236·
·236·
FN FS
M FS FN
M
T
T
图 14.16
正确利用对称、反对称性质,则可推知某些未知量,可大大简化计算过程。如对称变
形对称截面上[见图 14.15(b)],反对称内力 SF 等于零或已知;反对称变形[见图 14.15(c)]反
对称截面上,对称内力M 为零或已知。
1.对称问题
以图 14.17(a)对称变形为例,切开结构对称截面,此为三次超静定,应有三个多余未知力,即轴向力 1X ,剪切力 2X 与弯矩 3X ,则可证明其反对称内力 2X 应为零,正则方程为
11 1 12 2 13 3 1 0FX X Xδ δ δ Δ+ + + = ①
21 1 22 2 23 3 2 0FX X Xδ δ δ Δ+ + + = ②
31 1 32 2 33 3 3 0FX X Xδ δ δ Δ+ + + = ③ 用积分法计算 ijδ 及 ( )1,2,3iF iΔ = 时,所要用的载荷弯矩图 FM 以及 1 1X = , 2 1X = ,
3 1X = 时的弯矩图分别见图 14.17(b)、(c)、(d)、(e),其中 FM , 1M , 2M 均对称于对称轴,
而 3M 反对称于对称轴。由莫尔积分知,对称函数与反对称函数相乘在区间积分应为零,
即有 M M
X1
X2
X1X2
X3X3M M
(b) (c)
(d)
(a)
(e)
1 1
1 11
1
①
② ③
图 14.17
32 d 0F
F l
M Mx
EIΔ = =∫ , 1 2
12 21 d 0l
M M xEI
δ δ= = =∫ , 2 323 32 d 0
l
M Mx
EIδ δ= = =∫
将此结果代入①、②、③,此时图 14.17的正则方程为

第 14章 超静定系统
·237·
·237·
11 1 13 3 1 0FX Xδ δ Δ+ + = (14-5a)
22 2 0Xδ = (14-5b)
31 1 33 3 3 0FX Xδ δ Δ+ + = (14-5c)
从式(14-5b)可知, 2 0X = ,在对称的结构上受对称的载荷作用时,在对称截面上,反
对称的内力等于零。以后在解题时可作为已知条件用。这就是说利用对称性可减少求解方
程的个数,这是讲解本节的目的。
2.反对称问题
以图 14.18(c)为例,在对称面切开后,其多余未知力也是 1X , 2X 与 3X ,同上类似证明,其对称内力 1X 与 2X 应等于零,只需一个协调方程,即可解出 3X ,即有
Me
X1 X1X2
X3X3Me
(b) (c)
(d)
(a)
(e)
1 1
1 11
1
Me
③②
①
X2 Me
图 14.18
12 21 23 32 0δ δ δ δ= = = = , 1 3 0F FΔ Δ= =
将此结果代入式①、②、③,此时图 14.18的正则方程为
11 1 13 3 0X Xδ δ+ = (14-6a)
22 2 2 0FXδ Δ+ = (14-6b)
31 1 33 3 0X Xδ δ+ = (14-6c)
由式(14-6b)得 2 2 22/FX Δ δ= ,由式(14-6a)、式(14-6c)得 1 2 0X X= = 。在对称的结构上
受反对称的载荷作用时,在对称截面上,对称的内力等于零。同理以后在解题时可作为已
知条件用。
3.既非对称也非反对称问题
对于某些载荷既非对称,也非反对称,可将它们化为对称和反对称两种情况的叠加,
如图 14.19所示。 载荷作用在对称轴上的情形如下。

工程力学(下册)
·238·
·238·
F 2F
2F
F 2F
2F
(a) (b)
(c) (d) 图 14.19
【例 14.6】 如图 14.20(a)所示,AB为刚性杆受力 F,求各杆的内力。
a a a a
F FM=2Fa
⑤④③②①
A B A B
(a) (b)
C C
图 14.20
解:首先将图 14.20(a)简化到图 14.20(b),这样就可将问题简化成对称和反对称问题。单独有力 F作用时为对称问题,单独有力偶 M作用时为反对称问题。
对称问题: N1 N2 N3 N4 N5 5FF F F F F′ ′ ′ ′ ′= = = = =
反对称问题: N3 N1 N2 N4 N50 2 2F F F F F′′ ′′ ′′ ′′ ′′= − = − = = 0CM =∑ ( )N5 N42 2 2F a F a Fa′′ ′′⋅ + =
N4 N51 25 5
F F F F′′ ′′= =
【例 14.7】 已知抗弯刚度为 EI,半径为 R的圆环,直径 CD方向受一对力 F [见图 14.21(a)],求圆环内弯矩M 。 解:(1) 超静定次数:封闭圆环为三次超静定。在 C处截开,则有三个多余未知力:弯矩,轴向力,剪切力。
(2) 对称性:直径 CD为一对称轴,对称截面 C上剪切力为零,对称截面 D上弯矩和轴力与截面 C上相等。由竖直方向力的平衡可得 N / 2=F F 。故只有弯矩 1X 未知[见图 14.21(c)]。
(3) 根据对称性,选 1/4 半圆环为静定基,作用于 1/4 圆环的力如图 14.21(c)所示,则协调条件应是 D截面在 F 及弯矩 1X 作用下转角θ 应为零(由对称性可知),所以有
11 1 1 0FXδ Δ+ = ④
(4) 11δ , 1FΔ 的计算。

第 14章 超静定系统
·239·
·239·
F
B
D
A
C
F
C D
A
F
F
Me
FN
Me
A
2FMe=X1
Da
A
D1
ϕ
2FD
A
ϕ
(e)(d)
(c)(b)(a)
图 14.21
静定基上施加外力 F如图 14.21(d)所示,单位力偶如图 14.21(e)所示,用莫尔定理求 11δ与 1FΔ 。
由单位力偶引起的弯矩 1M = , ( )0 ϕ π≤ ≤
由外力引起弯矩的 ( )1 cos2P
FRM ϕ= − , 02
ϕ π⎛ ⎞⎜ ⎟⎝ ⎠≤ ≤
故有 π2
11 0d d
2δ ϕ⋅ π= = =∫ ∫l
M M R RsEI EI EI
( )2 22
1 0
1 cosd d 1
2 2F
F l
FRM M FRsEI EI EI
ϕΔ ϕ
π − π⎛ ⎞= = = − −⎜ ⎟⎝ ⎠∫ ∫
(5) 求未知力 1X 。
由式④ 2
1 1 02 2 2
R FRXEI EI
π π⎛ ⎞ ⎛ ⎞⋅ − − =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
得
1 1 0.1822
FRX FRπ⎛ ⎞= − =⎜ ⎟π ⎝ ⎠
(6) 圆环内弯矩 M为
( ) ( ) ( )1 1 cos 0.182 1 0.636 cos2 2P
FR FRM M X M FRϕ θ= + = − − × = −
14.4 连续梁及三弯矩方程
为减小跨度很大直梁的弯曲变形和应力,常在其中间安置若干中间支座[见图 14.22(a)],

工程力学(下册)
·240·
·240·
在建筑、桥梁以及机械中常见的这类结构称为连续梁。撤去中间支座,该梁是两端铰支的
静定梁,因此中间支座就是其多余约束,有多少个中间支座,就有多少个多余约束。中间
支座数就是连续梁的超静定次数。 对连续梁采用下述记号:从左到右把支座依次编号为 0,1,2,⋯[见图 14.22(a)],把
跨度依次编号为 1l , 2l , il ,⋯。设所有支座在同一水平线上,并无不同沉陷。且设只有支
座 0 为固定铰支座,其余皆为可动铰支座。这样,如梁只有两端铰支座,它将是两端简支的静定梁。于是增加一个中间支座就增加了 1 个多余约束.静不定的次数就等于中间支座的数目。
(a)
i+10 1 i-1 i n
1M iM1−iM 1+iM
(b)
l1 li
图 14.22
连续梁是超静定结构,静定基可有多种选择,如果选撤去中间支座为静定基,则因每
个支座反力将对静定梁的每个中间支座位置上的位移有影响,因此正则方程中每个方程都
将包含多余约束反力,使计算非常繁琐。如果设想将每个中间支座上的梁切开[见图14.23(a)],并装上铰链,将连续梁变成若干个简支梁,每个简支梁都是一个静定基,这相当于把每个支座上梁的内约束解除,即将其内力弯矩 1M , 2M ,⋯, iM , 1iM + , nM 作为
多余约束力[见图 14.23(b)],则每个支座上方的铰链两侧截面上需加上大小相等、方向相反的一对力偶矩,与其相应的位移是两侧截面的相对转角。于是多余约束处的变形协调条件
是梁中间支座处两侧截面的相对转角为零。如对中间任一支座 i来说[见图 14.23(a)],其变形协调条件为
1 1 1 1 0i ,i i i ,i i i ,i i iFM M Mδ δ δ Δ− − + ++ + + = (14-7)
方程式(14-7)中只涉及三个未知量 1iM − , iM , 1iM + 。 , 1i iδ − , iiδ , , 1i iδ + 及 iFΔ 可用莫尔
积分来求。
(1) 求 iFΔ 。静定基上只作用外载荷时[见图 14.23(b)],跨度 il 上弯矩图为 iFM ,跨度 1il +
上弯矩图为 ( )1i PM + [见图 14.23(c)]。当 1iM = 时,跨度 il 和 1il + 内弯矩分别为

第 14章 超静定系统
·241·
·241·
iM
(b)
i-1 i i i+1
(a)
i+1i-1 i 1iM +
1iM −
1
il 1il +
1
(d)
iFMiω
ix
ia
d ix
d iω 1iω +
1d iω +
1ix +
1d ix +
1ib + (c)
图 14.23
i
i
xM
l′ = , 1
1
i
i
xM
l+
+
′′ =
由莫尔积分得 ( )
1
1
111
1
1 11
d d
1 1 1d d
i i
i i
ii FiF iiF i il l
i i
i i i il li i
M xM xx x
EIl EIl
x xEI l l
Δ
ω ω
+
+
+++
+
+ ++
= +
⎛ ⎞= +⎜ ⎟
⎝ ⎠
∫ ∫
∫ ∫
式中, d diF i iM x ω= 是外载单独作用下,跨度 il 内弯矩图的微面积[见图 14.23(c)],而
di
i ilx ω∫ 是弯矩图面积 iω 对 il 左侧的静矩,如以 ia 表示跨度 il 内弯矩图面积的形心到左端的
距离,则 di
i i i ilx aω ω=∫ 。同理, 1ib + 表示外载荷单独作用下,跨度 1il + 内弯矩图面积 1iω + 的
形心到右端的距离,则1
1 1 1 1di
i i i ilx bω ω
++ + + +=∫ 。于是有
1 1
1
1 i i i iiF
i i
a bEI l l
ω ωΔ + +
+
⎛ ⎞= +⎜ ⎟
⎝ ⎠

工程力学(下册)
·242·
·242·
式中,第一项可看作是跨度 il 右端按逆时针方向的转角,第二项看作跨度 1il + 按顺时针
方向的转角。两项和就是铰链 i两侧截面在外载荷单独作用下的相对转角。 (2) ( )1i iδ − , iiδ , ( )1i iδ + 的计算。
当 n支座铰链处作用有 1iM = 时,用莫尔积分有
( )1
1 11 1
1 1
1 1 1d d3i i
i i i iii i i i il l
i i i i
x x x xx x l l
EI l l EI l l EIδ
+
+ ++ +
+ +
⎛ ⎞⎛ ⎞ ⎛ ⎞⎛ ⎞= + = +⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠ ⎝ ⎠⎝ ⎠∫ ∫
而 , 1i iδ − , , 1i iδ + 也可类似求得
. 1 6i
i ilEI
δ − = , 1. 1 6
ii i
lEI
δ ++ =
(3) 三弯矩方程。 将 ( )1i iδ − , iiδ , ( )1i iδ + , iFΔ 代入式(14-7)得三弯矩方程
( ) ( )1 1
1 1 111
6 62 i i i i
i i i i i ii ii i
a bM l M l l M l
l lω ω + +
− + +++
⎛ ⎞+ + + = − +⎜ ⎟
⎝ ⎠ (14-8)
式中, i代表任一支座,如 1i = ,2,⋯, n,则可得到 n个联立方程,解 n个中间支座多余力 1M , 2M ,⋯, nM ,此 n个联立方程中每个方程只涉及三个多余力,求解比较方便。 【例 14.8】 如图 14.24所示左端 z为固定端,右端为自由端的连续梁受力 F 作用,其抗弯刚度为 EI,试用三弯矩方程求解 B、C、D处的弯矩。
C D E
l
B
l l
F
Fl
27
Fl
(a)
(b)
(c)
A
F
l′ l l
B C D 1M
2M 3M Fl= −
1 2 30
图 14.24

第 14章 超静定系统
·243·
·243·
解:为能应用三弯矩方程,将固定端视为跨度为无限小( 0l′ → )的简支梁 AB,而外伸端的载荷可向支座 D简化,得一力 F 与弯矩 Fl,原结构[见图 14.24(a)]变化为图 14.24(b)。将 A、B、C、D四处支座处分别用 0、1、2、3表示,则对 1、2两支座应用三弯矩方程式(14.8),并将 1 0l l′= = , 2 3l l l= = , 0 0M = , 3M Fl= 代入得
1 22 0M l M l+ = 2
1 24 0M l M l Fl+ − =
得 117BM M Fl= = − , 2
27CM M Fl= = , DM Fl=
小 结
1.静定、静不定结构与静不定次数
静定结构(或系统):无多余联系的几何不变的承载结构系统称为静定结构(或系统),其支承反力及内力都可由静力学平衡方程求得。静定结构除了受力变形外,没有可运动的自
由度。 静不定结构:在静定系统上增加多余约束,因而增加了多余约束未知力,用静力平衡
方程不能确定其全部未知支承反力和内力的结构系统,称为静不定结构(或系统)。 静不定次数:静不定结构的所有未知支承反力和内力的总数与结构所能提供的独立的
静力平衡方程数之差,即为此结构的静不定次数(或阶数)。
内、外静不定:静不定结构外部支座反力不能全部由静力平衡方程求出的情况,称为
外超静定。静不定结构内部约束形成的内力不能由静力平衡方程求出的情况称为内静不定
结构。内、外静不定次数之和为该静不定结构的静不定次数。
2.基本静定系(静定基)与相当系统
解除静不定结构的某些约束后得到的静定结构,称为原静不定结构的基本静定系(又叫静定基)。在基本静定系上加上外载荷和多余约束力,这样的系统称为相当系统。
3.力法解静不定结构
以“力”为基本未知量求解静不定结构的方法,称为力法。
应用力法求解静不定问题的步骤: (1) 根据问题,确定其是静定还是静不定问题,如为后者,确定静不定次数。 (2) 确定哪些约束是多余约束,分析可供选择的基本静定系,并注意利用对称性,反
对称性,选定合适的静定系统,在静定系上加上外力和多余约束力,形成相当系统。 (3) 比较相当系统与原系统,在多余约束处,确定变形协调条件,并列写正则方程(对
有n个多余约束的结构) 011212111 =++⋅⋅⋅++ Pnn XXX Δδδδ
022222121 =++⋅⋅⋅++ Pnn XXX Δδδδ
02211 =++⋅⋅⋅++ nPnnnnn XXX Δδδδ

工程力学(下册)
·244·
·244·
(4) 用莫尔积分计算 ijδ ,ΔiP。
在基本系统上的不同多余约束处分别施加单位力(广义力),建立单位载荷系统,作出相应内力图。在基本系统上加上外载荷,作出相应内力图,用图乘法分别求出 ijδ , iPΔ 。
(5) 求解正则方程,解出未知多余力 iX ,作出载荷及多余约束力作用于基本静定系上引起的内力图,供进一步分析用。
4.连续梁与三弯矩方程
(1) 连续梁:一简支梁,在其两支座中间增加若干个辊轴铰支座形成的静不定结构,称为连续梁。中间支座的个数即其静不定次数。
(2) 连续梁的静定系与相当系统:将支座上方梁切开改为铰链连接,每一跨都是一个简支梁,即为连续梁的静定系。在静定系上加上外载荷,在中间支座上方铰链处加上一对
大小相等、方向相反的力偶矩 1M , 2M ,⋯, mM (设有m个中间支座),以多余未知力 1M ,
2M ,⋯, mM 为基本未知量。
(3) 变形协调条件与三弯矩方程:比较相当系与原系统,中间支座上方梁的两侧截面相对转角为零(原系统是连续的,在支座处不会折断)。据此写出正则方程,即三弯矩方程(只对任一中间支座 n写出如式(14-7))。
(4) 求出由m个中间支座组成的连续梁的联立方程组,解出多余约束力 nM (n=1,2,⋯,
m)。最后,问题转化为基本静定系的求解。
思 考 题
14-1 什么叫多余约束?选定多余约束的原则是什么?如何确定超静定结构的超静定次数?
14-2 什么叫基本结构?它所要求满足的唯一条件是什么? 14-3 什么叫相当系统?在什么条件下,相当系统同原超静定系统完全等价?相当系统
的主要性质是什么? 14-4 力法正则方程的物理意义是什么?是否可以说力法的实质是叠加法?为什么? 14-5 试举例说明力法正则方程中自由项 iPΔ 和系数 ijδ 的物理意义。 14-6 试举例说明:对同一个超静定结构,可以取得几个不同的基本结构。 14-7 对称结构受对称载荷时,在沿其对称轴所截取的截面上内力和位移有何特点?受
反对称载荷作用时,又有何特点?怎样利用这些特点使计算得以简化? 14-8 什么叫内超静定?如何区分外超静定结构和内超静定结构?分析这两种问题的
方法有何异同?
习 题
14-1 如图 14.25所示结构中梁 ABC的两端固定,在点 B刚好与圆环接触,圆环下方为光滑刚性平面。在图示载荷作用下,多余约束力的个数有如下四种答案,试判断哪一种是

第 14章 超静定系统
·245·
·245·
正确的。 (A) 5个; (B) 6个; (C) 7个; (D) 8个。
14-2 如图 14.26所示结构中,已知载荷情况。这时利用对称性或反对称性,结构的未知约束力个数有如下四种答案,试判断哪一种是正确的。
(A)2个; (B)3个; (C)4个; (D)5个。
图 14.25 图 14.26
14-3 关于求解图 14.27(a)所示的超静定结构,解除多余约束有图 14.27(b)、(c)、(d)、(e)所示四种选择,试判断下列结论中哪一种是正确的。
(A) (b)、(c)、(d)正确; (B) (b)、(d)正确; (C) (b)、(c)、(e)正确; (D) (e)正确。
图 14.27
14-4 正方形闭合框架,受力如图 14.28所示。各杆具有相同的弯曲刚度 EI。关于截面A上的内力量有如下四种结论,试判断哪一种是正确的。
(A) Q 0AF ≠ , N 0AF ≠ , 0AM ≠ ; (B) Q 0AF = , N 0AF ≠ , 0AM ≠ ; (C) Q 0AF ≠ , N 0AF = , 0AM = ; (D) Q 0AF = , N 0AF = , 0AM = 。
14-5 超静定平面刚架承受载荷如图 14.29所示。若忽略轴向力和剪切力影响,试确定其约束力。
图 14.28 图 14.29
14-6 如图 14.30所示钢架中,各杆的弯曲刚度均为 EI,且 q、l、EI等为已知,试画出

工程力学(下册)
·246·
·246·
它们的弯矩图。
(a) (b)
图 14.30
14-7 双铰圆拱半径为 R,承受载荷如图 14.31 所示,FP、R、EI 等为已知。试求加力点 C的铅垂位移。
14-8 如图 14.32 所示闭合框架中,F、q、l、EI 等为已知。试作弯矩图并画出框架变形后的大致形状。
图 14.31 图 14.32
14-9 链环受力如图 14.33所示,链环杆的直径 d、F、R、d、E等为已知。试求 A、B两点的相对位移(不考虑轴力的影响)。
14-10 试求如图 14.34所示超静定梁的支反力。设固定端沿梁轴线的反力可以忽略。
A B
l
q
图 14.33 图 14.34
14-11 如图 14.35所示杆系,各杆的 EA相等。试求各杆的内力。 14-12 如图 14.36所示结构,AB梁和 CD梁的抗弯刚度均为 6 224 10 N mEI = × ⋅ ,两梁
用长 5 ml = 、横截面面积 4 23 10 mA −= × 的钢杆连接,弹性模量 200 GPaE = 。若 50 kNF = ,
试求 AB梁的 B点挠度。
2l
2l

第 14章 超静定系统
·247·
·247·
A
F
C B
lα α
D
EC
2m
F
A
B
D
2m
l
图 14.35 图 14.36
14-13 试画出如图 14.37所示梁的剪力图和弯矩图。设 EI为常量。
A C
a
q
B
qa
D
2a3a aa
图 14.37