
Nicole Tremblay, inf. M.Sc., ICSP, CSIO ( C) Anne-Marie Martinez, inf. M.Sc.
4
BAB II
TINJAUAN PUSTAKA
2.1 Definisi Robot
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik
menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program
yang telah didefinisikan terlebih dulu. Istilah robot berawal bahasa Cheko
“robota” yang berarti pekerja atau kuli yang tidak mengenal lelah atau bosan.
Robot biasanya digunakan untuk tugas yang berat, berbahaya, pekerjaan yang
berulang dan kotor (http://id.wikipedia.org/wiki/Robot).
2.2 Robot Avoider
Robot avoider adalah robot beroda atau berkaki yang diprogram untuk dapat
menghindar jika ada halangan, misalnya dinding. Robot avoider minimal
membutuhkan tiga buah sensor untuk mendeteksi penghalang yaitu sensor depan,
kanan dan kiri. Dalam hal ini sensor yang dipergunakan adalah sensor ultrasonik.
Robot membutuhkan sensor yang banyak untuk hasil pendeteksian
penghalang yang lebih baik. Hal ini dikarenakan keterbatasan sudut pancaran
sensor ( biasanya sekitar 15 derajat saja ). Sudut pantulan yang terlalu besar akan
menyebabkan hasil pembacaan sensor yang kurang akurat. Robot avoider adalah
cikal bakal dari robot pemadam api dimana konsep dari robot avoider ini dapat
berubah menjadi robot pemadam api dengan menambahkan sensor api.
2.3 PengertianMikrokontroler AVR
Mikrokontroler adalah suatu keping IC dimana terdapat mikroprosesor dan
memori program (ROM) serta memori serbaguna (RAM), bahkan ada beberapa
jenis mikrokontroler yang memiliki fasilitas ADC, PLL, EEPROM dalam satu
kemasan. Penggunaan mikrokontroler dalam bidang kontrol sangat luas dan
populer. Ada beberapa vendor yang membuat mikrokontroler diantaranya Intel,
Microchip, Winbond, Atmel, Philips, Xemics dan lain - lain. Dari beberapa
vendor tersebut, yang paling populer digunakan adalah mikrokontroler buatan
Atmel (Heryanto, 2008).
5
Mikrokontroler AVR (Alf and Vegard’s Risc prosesor) memiliki arsitektur
RISC 8 bit, di mana semua instruksi dikemas dalam kode 16-bit (16-bits word)
dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus clock, berbeda
dengan instruksi MCS 51 yang membutuhkan 12 siklus clock. Tentu saja itu
terjadi karena kedua jenis mikrokontroler tersebut memiliki arsitektur yang
berbeda. AVR berteknologi RISC (Reduced Instruction Set Computing),
sedangkan seri MCS 51 berteknologi CISC (Complex Instruction Set Computing).
Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu keluarga ATtiny,
keluarga AT90Sxx, keluarga ATMega dan AT86RFxx (Heryanto, 2008).
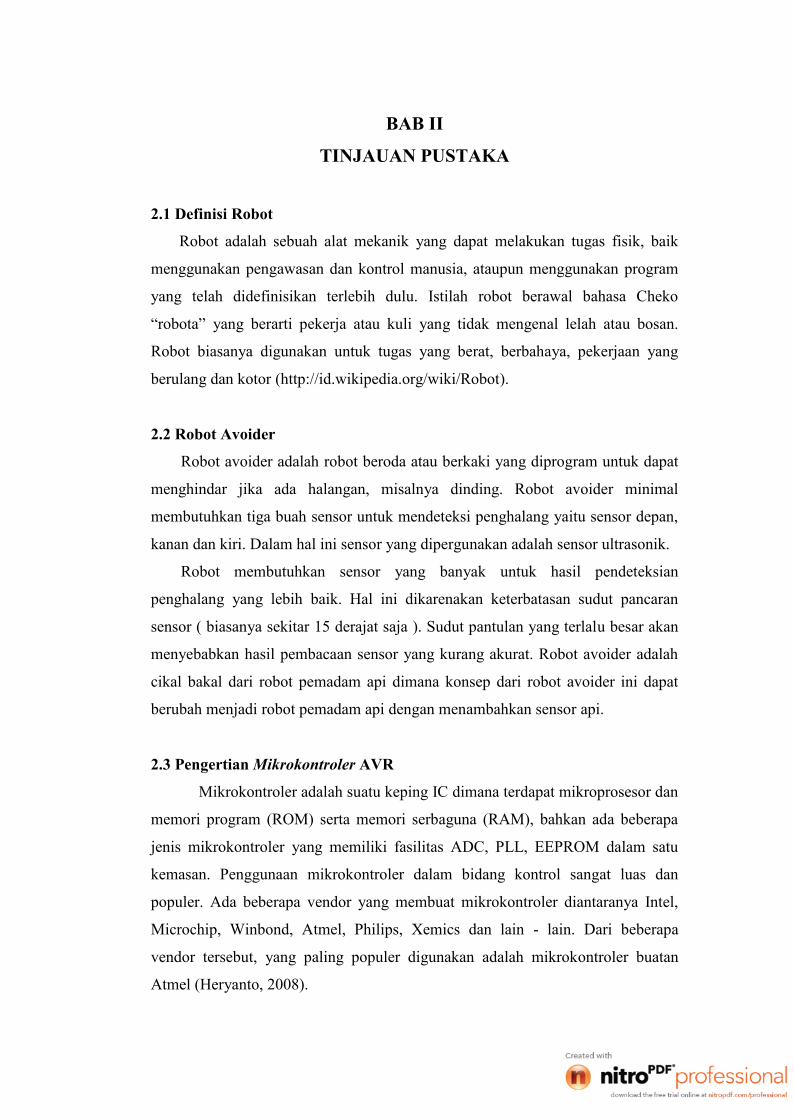
Gambar 1. Skematik Sistem Minimum MK AVR
2.3.1 Arduino Duemelanove dengan Mikrokontroler ATMega 328
Arduino Duemelanove adalah board mikrokontroler berbasis ATmega328.
Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat
digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal,
koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung
mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board
Arduino ke komputer dengan menggunakan kabel USB atau listrik dengan AC
yang-ke adaptor-DC atau baterai untuk menjalankannya. Berbeda dengan semua
board sebelumnya dalam hal koneksi USB-to-serial yaitu menggunakan fitur
Atmega8U2 yang diprogram sebagai konverter USB-to-serial berbeda dengan
board sebelumnya yang menggunakan chip FTDI driver USB-to-serial.
(http://agfi.staff.ugm.ac.id/blog)
Reset
AVccVcc ARefGND GND
100nF
VCC
10K
3.3uF
VCC
VCC 100nF
100nF
GND
GNDSCKMOSIRSTMISO
6
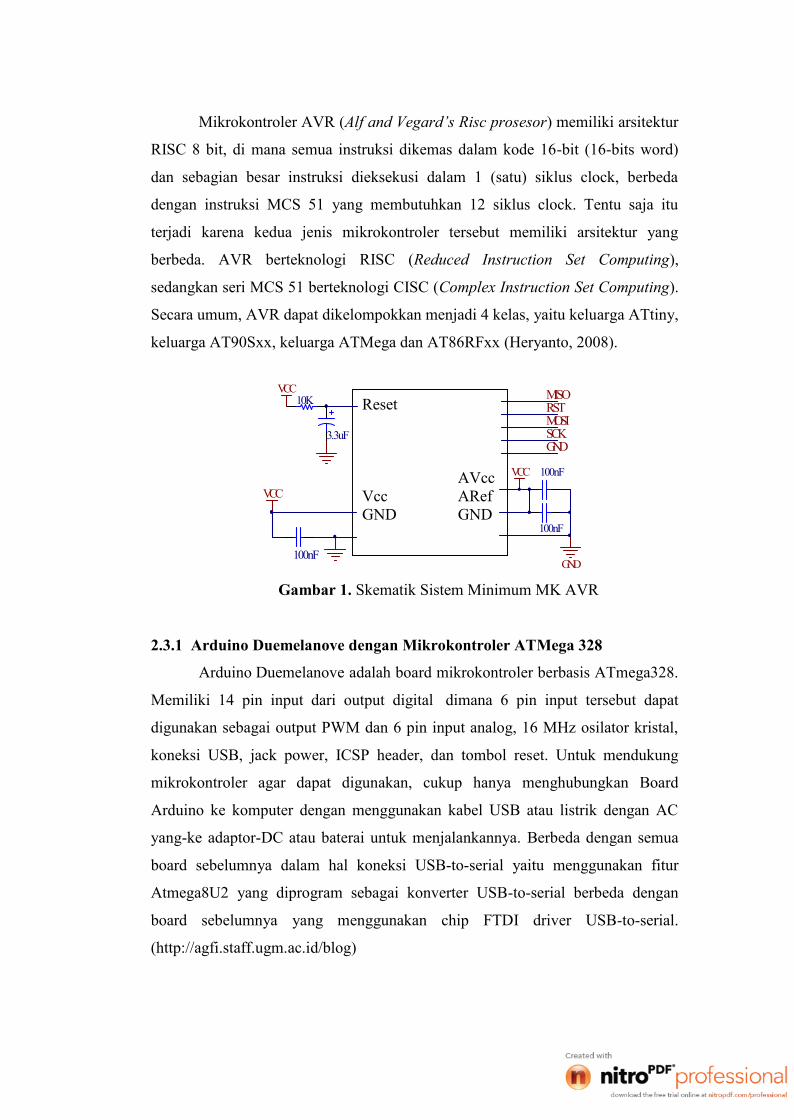
Berikut fitur-fitur Mikrokontroler ATMega 328
1. Microcontroller ATmega328
2. Operasi dengan daya 5V Voltage
3. Input Tegangan (disarankan) 7-12V
4. Input Tegangan (batas) 6-20V
5. Digital I / O Pins 14 (dimana 6 memberikan output PWM)
6. Analog Input Pin 6
7. DC Lancar per I / O Pin 40 mA
8. Saat 3.3V Pin 50 mA DC
9. Flash Memory 32 KB (ATmega328) yang 0,5 KB digunakan oleh
bootloader
10. SRAM 2 KB (ATmega328)
11. EEPROM 1 KB (ATmega328)
12. Clock Speed 16 MHz
2.3.1.1 Daya
Arduino dapat diaktifkan melalui koneksi USB atau dengan catu daya
eksternal (otomatis). Eksternal (non-USB) daya dapat berasal baik dari AC-ke
adaptor-DC atau baterai. Adaptor ini dapat dihubungkan dengan menancapkan
Gambar 2. Pingmap Arduino dan ATMega 328
6
Berikut fitur-fitur Mikrokontroler ATMega 328
1. Microcontroller ATmega328
2. Operasi dengan daya 5V Voltage
3. Input Tegangan (disarankan) 7-12V
4. Input Tegangan (batas) 6-20V
5. Digital I / O Pins 14 (dimana 6 memberikan output PWM)
6. Analog Input Pin 6
7. DC Lancar per I / O Pin 40 mA
8. Saat 3.3V Pin 50 mA DC
9. Flash Memory 32 KB (ATmega328) yang 0,5 KB digunakan oleh
bootloader
10. SRAM 2 KB (ATmega328)
11. EEPROM 1 KB (ATmega328)
12. Clock Speed 16 MHz
2.3.1.1 Daya
Arduino dapat diaktifkan melalui koneksi USB atau dengan catu daya
eksternal (otomatis). Eksternal (non-USB) daya dapat berasal baik dari AC-ke
adaptor-DC atau baterai. Adaptor ini dapat dihubungkan dengan menancapkan
Gambar 2. Pingmap Arduino dan ATMega 328
6
Berikut fitur-fitur Mikrokontroler ATMega 328
1. Microcontroller ATmega328
2. Operasi dengan daya 5V Voltage
3. Input Tegangan (disarankan) 7-12V
4. Input Tegangan (batas) 6-20V
5. Digital I / O Pins 14 (dimana 6 memberikan output PWM)
6. Analog Input Pin 6
7. DC Lancar per I / O Pin 40 mA
8. Saat 3.3V Pin 50 mA DC
9. Flash Memory 32 KB (ATmega328) yang 0,5 KB digunakan oleh
bootloader
10. SRAM 2 KB (ATmega328)
11. EEPROM 1 KB (ATmega328)
12. Clock Speed 16 MHz
2.3.1.1 Daya
Arduino dapat diaktifkan melalui koneksi USB atau dengan catu daya
eksternal (otomatis). Eksternal (non-USB) daya dapat berasal baik dari AC-ke
adaptor-DC atau baterai. Adaptor ini dapat dihubungkan dengan menancapkan
Gambar 2. Pingmap Arduino dan ATMega 328

7
plug jack pusat-positif ukuran 2.1mm konektor POWER. Ujung kepala dari
baterai dapat dimasukkan kedalam Gnd dan Vin pin header dari konektor
POWER.
Kisaran kebutuhan daya yang disarankan untuk board Uno adalah7 sampai
dengan 12 volt, jika diberi daya kurang dari 7 volt kemungkinan pin 5v Uno dapat
beroperasi tetapi tidak stabil kemudian jikadiberi daya lebih dari 12V, regulator
tegangan bisa panas dan dapat merusak board Uno.
Pin listrik adalah sebagai berikut:
1. VIN. Tegangan masukan kepada board Arduino ketika itu menggunakan
sumber daya eksternal (sebagai pengganti dari 5 volt koneksi USB atau
sumber daya lainnya).
2. 5V. Catu daya digunakan untuk daya mikrokontroler dan komponen lainnya.
3. 3v3. Sebuah pasokan 3,3 volt dihasilkan oleh regulator on-board.
4. GND. Ground pin.
2.3.1.2 Memori
ATmega328 memiliki 32 KB (dengan 0,5 KB digunakan untuk
bootloader), 2 KB dari SRAM dan 1 KB EEPROM (yang dapat dibaca dan ditulis
dengan EEPROM liberary).
2.3.1.3 Input dan Output
Masing-masing dari 14 pin digital di Uno dapat digunakan sebagai input
atau output, dengan menggunakan fungsi pinMode (), digitalWrite (), dan
digitalRead (), beroperasi dengan daya 5 volt. Setiap pin dapat memberikan atau
menerima maksimum 40 mA dan memiliki internal pull-up resistor (secara default
terputus) dari 20-50 kOhms. Selain itu, beberapa pin memiliki fungsi khusus:
1. Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirimkan
(TX) TTL data serial. Pin ini dihubungkan ke pin yang berkaitan dengan chip
Serial ATmega8U2 USB-to-TTL.
8
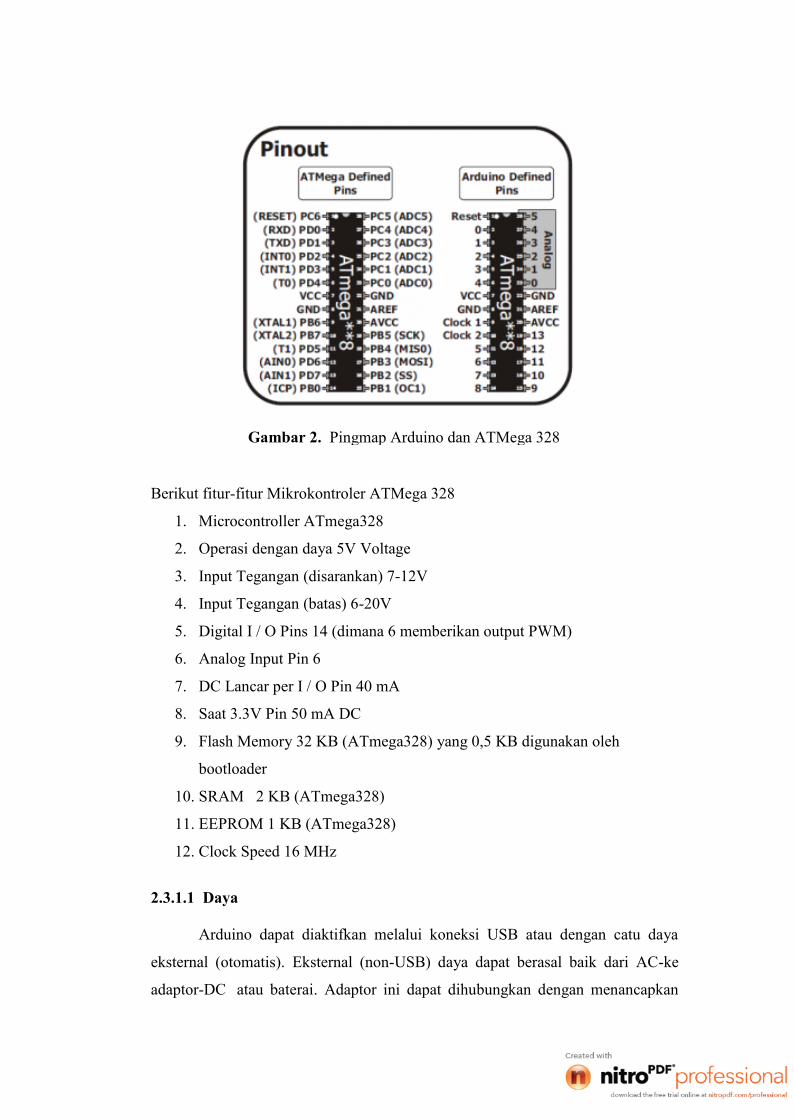
2. Eksternal menyela: 2 dan 3. Pin ini dapat dikonfigurasi untuk memicu interrupt
pada nilai yang rendah, dengan batasan tepi naik atau turun, atau perubahan
nilai.
3. PWM: 3, 5, 6, 9, 10, dan 11. Menyediakan output PWM 8-bit dengan fungsi
analogWrite ().
4. SPI: 10 (SS), 11 (Mosi), 12 (MISO), 13 (SCK). Pin ini mendukung komunikasi
SPI menggunakan SPI library.
5. LED: 13. Ada built-in LED terhubung ke pin digital 13. Ketika pin bernilai
nilai HIGH, LED on, ketika pin bernilai LOW, LED off.
Selain itu memiliki 6 masukan analog, berlabel A0 sampai dengan A5, yang
masing-masing menyediakan 10 bit dengan resolusi (yaitu 1024 nilai yang
berbeda). Selain itu, beberapa pin memiliki fungsi khusus:
1. I2C: A4 (SDA) dan A5 (SCL). Dukungan I2C (TWI) komunikasi menggunakan
perpustakaan Wire.
2. Aref. Tegangan referensi (0 sampai 5V saja) untuk input analog. Digunakan
dengan fungsi analogReference ().
3. Reset. Bawa baris ini LOW untuk me-reset mikrokontroler.
2.3.1.4 Komunikasi
Arduino memiliki sejumlah fasilitas untuk berkomunikasi dengan
komputer, Arduino lain, atau mikrokontroler lainnya. ATmega328 menyediakan
UART TTL (5V) untuk komunikasi serial, yang tersedia di pin digital 0 (RX) dan
1 (TX). Sebuah ATmega8U2 sebagai saluran komunikasi serial melalui USB dan
sebagai port virtual com untuk perangkat lunak pada komputer. Firmware ’8 U2
menggunakan driver USB standar COM, dan tidak ada driver eksternal yang
diperlukan. Namun, pada Windows diperlukan, sebuah file inf. Perangkat lunak
Arduino terdapat monitor serial yang memungkinkan digunakan memonitor data
tekstual sederhana yang akan dikirim ke atau dari board Arduino. LED RX dan
TX di papan tulis akan berkedip ketika data sedang dikirim melalui chip USB-to-
serial dengan koneksi USB ke komputer (tetapi tidak untuk komunikasi serial
pada pin 0 dan 1).
9
Sebuah SoftwareSerial library memungkinkan untuk berkomunikasi
secara serial pada salah satu pin digital pada board. ATmega328 juga mendukung
I2C (TWI) dan komunikasi SPI. Perangkat lunak Arduino termasuk perpustakaan
Kawat untuk menyederhanakan penggunaan bus I2C. Untuk komunikasi SPI,
menggunakan perpustakaan SPI.
2.3.1.4 Arduino IDE
Arduino IDE adalah adalah sebuah cross-platform aplikasi yang ditulis
dalam Java, dan berasal dari pengolahan bahasa pemrograman.. Aplikasi Ini
termasuk code editor dengan fitur seperti syntax highlighting dan indentasi
otomatis, dan juga mampu menyusun dan meng-upload program untuk Arduino
dengan satu klik.
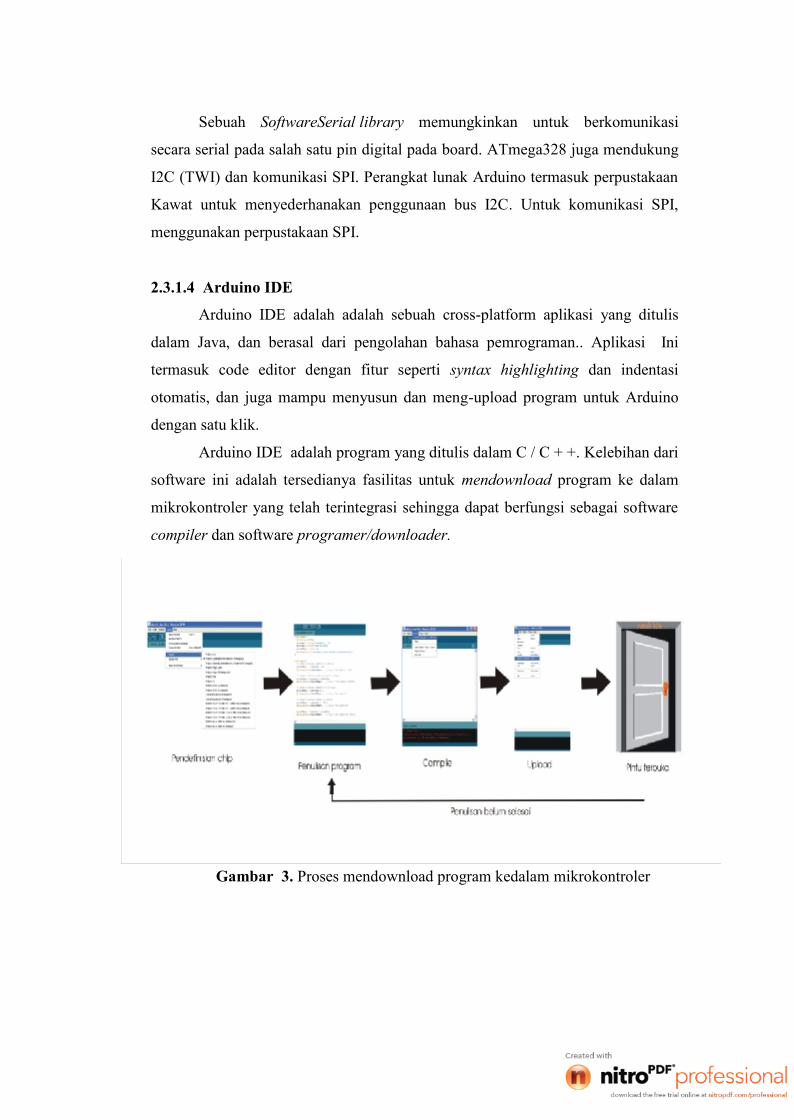
Arduino IDE adalah program yang ditulis dalam C / C + +. Kelebihan dari
software ini adalah tersedianya fasilitas untuk mendownload program ke dalam
mikrokontroler yang telah terintegrasi sehingga dapat berfungsi sebagai software
compiler dan software programer/downloader.
Gambar 3. Proses mendownload program kedalam mikrokontroler
Gambar 10. Konektor DB 9 Male dan DB 9 Female
10
Proses mendownload program ke dalam mikrokontroler dapat dilihat pada
gambar 7 diatas. Prosesnya mendownload program di mulai dengan menuliskan
program yang akan di buat dalam bahasa pemograman C / C++, kemudian
program di compile . Hasil compile selanjutnya didownload ke dalam
mikrokontroler dalam hal ini Atmega 328. Program yang telah di download
kemudian diaplikasikan kedalam Servo, jika hasil donwnload program belum
sesuai dengan hasil yang diinginkan maka kita harus mengecek program yang kita
buat sebelum didownload kembali kedalam mikrokontroler.
2.4 Ultraungu
Radiasi ultraungu atau sering disingkat UV (bahasa Inggris: ultraviolet)
adalah radiasi elektromagnetis terhadap panjang gelombang yang lebih pendek
dari daerah dengan sinar tampak, namun lebih panjang dari sinar-X yang kecil.
Radiasi UV dapat dibagi menjadi hampir UV (panjang gelombang: 380–200 nm)
dan UV vakum (200–10 nm). Dalam pembicaraan mengenai pengaruh radiasi UV
terhadap kesehatan manusia dan lingkungan, jarak panjang gelombang sering
dibagi lagi kepada UVA (380–315 nm), yang juga disebut "Gelombang Panjang"
atau "blacklight"; UVB (315–280 nm), yang juga disebut "Gelombang Medium"
(Medium Wave); dan UVC (280-10 nm), juga disebut "Gelombang Pendek" (Short
Wave) (http://id.wikipedia.org).
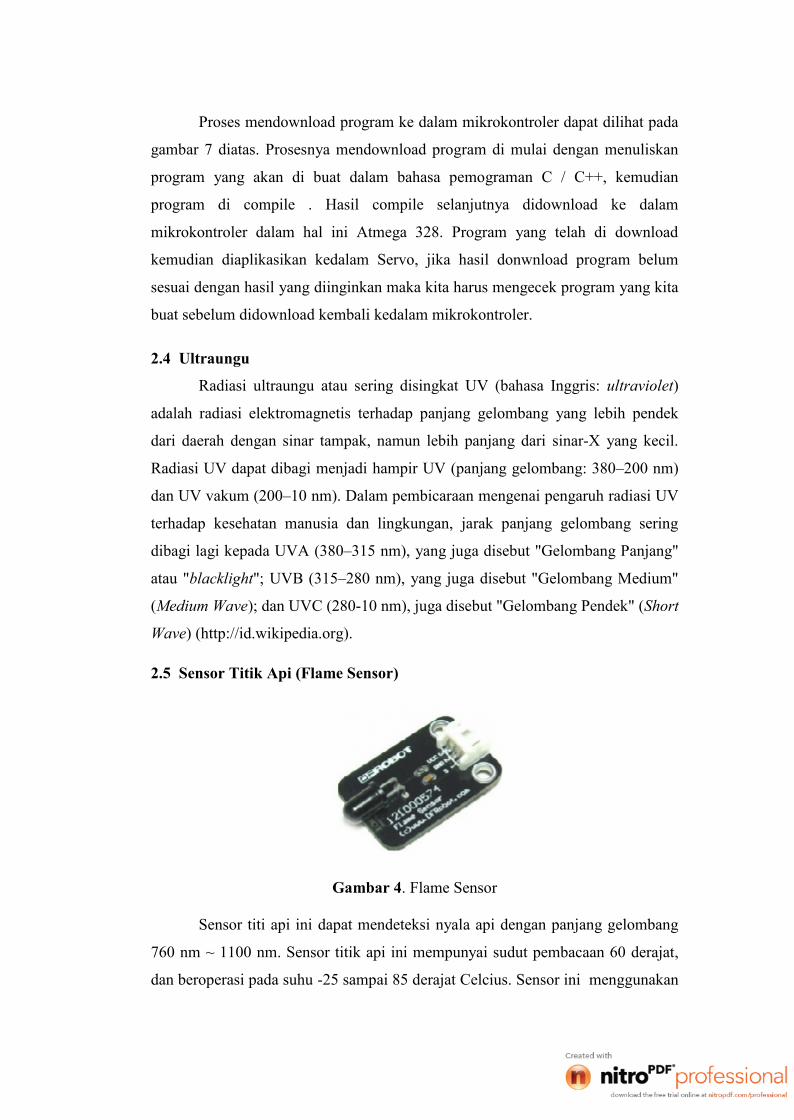
2.5 Sensor Titik Api (Flame Sensor)
Gambar 4. Flame Sensor
Sensor titi api ini dapat mendeteksi nyala api dengan panjang gelombang
760 nm ~ 1100 nm. Sensor titik api ini mempunyai sudut pembacaan 60 derajat,
dan beroperasi pada suhu -25 sampai 85 derajat Celcius. Sensor ini menggunakan
11
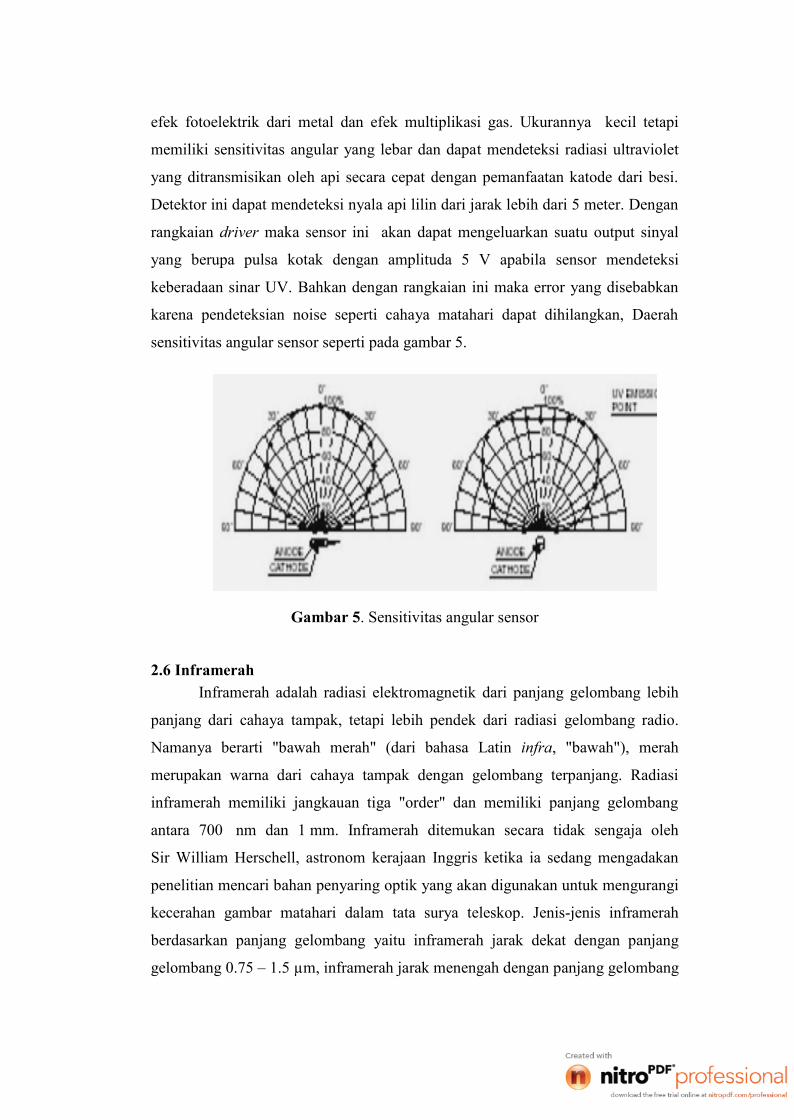
efek fotoelektrik dari metal dan efek multiplikasi gas. Ukurannya kecil tetapi
memiliki sensitivitas angular yang lebar dan dapat mendeteksi radiasi ultraviolet
yang ditransmisikan oleh api secara cepat dengan pemanfaatan katode dari besi.
Detektor ini dapat mendeteksi nyala api lilin dari jarak lebih dari 5 meter. Dengan
rangkaian driver maka sensor ini akan dapat mengeluarkan suatu output sinyal
yang berupa pulsa kotak dengan amplituda 5 V apabila sensor mendeteksi
keberadaan sinar UV. Bahkan dengan rangkaian ini maka error yang disebabkan
karena pendeteksian noise seperti cahaya matahari dapat dihilangkan, Daerah
sensitivitas angular sensor seperti pada gambar 5.
Gambar 5. Sensitivitas angular sensor
2.6 InframerahInframerah adalah radiasi elektromagnetik dari panjang gelombang lebih
panjang dari cahaya tampak, tetapi lebih pendek dari radiasi gelombang radio.
Namanya berarti "bawah merah" (dari bahasa Latin infra, "bawah"), merah
merupakan warna dari cahaya tampak dengan gelombang terpanjang. Radiasi
inframerah memiliki jangkauan tiga "order" dan memiliki panjang gelombang
antara 700 nm dan 1 mm. Inframerah ditemukan secara tidak sengaja oleh
Sir William Herschell, astronom kerajaan Inggris ketika ia sedang mengadakan
penelitian mencari bahan penyaring optik yang akan digunakan untuk mengurangi
kecerahan gambar matahari dalam tata surya teleskop. Jenis-jenis inframerah
berdasarkan panjang gelombang yaitu inframerah jarak dekat dengan panjang
gelombang 0.75 – 1.5 µm, inframerah jarak menengah dengan panjang gelombang
11
efek fotoelektrik dari metal dan efek multiplikasi gas. Ukurannya kecil tetapi
memiliki sensitivitas angular yang lebar dan dapat mendeteksi radiasi ultraviolet
yang ditransmisikan oleh api secara cepat dengan pemanfaatan katode dari besi.
Detektor ini dapat mendeteksi nyala api lilin dari jarak lebih dari 5 meter. Dengan
rangkaian driver maka sensor ini akan dapat mengeluarkan suatu output sinyal
yang berupa pulsa kotak dengan amplituda 5 V apabila sensor mendeteksi
keberadaan sinar UV. Bahkan dengan rangkaian ini maka error yang disebabkan
karena pendeteksian noise seperti cahaya matahari dapat dihilangkan, Daerah
sensitivitas angular sensor seperti pada gambar 5.
Gambar 5. Sensitivitas angular sensor
2.6 InframerahInframerah adalah radiasi elektromagnetik dari panjang gelombang lebih
panjang dari cahaya tampak, tetapi lebih pendek dari radiasi gelombang radio.
Namanya berarti "bawah merah" (dari bahasa Latin infra, "bawah"), merah
merupakan warna dari cahaya tampak dengan gelombang terpanjang. Radiasi
inframerah memiliki jangkauan tiga "order" dan memiliki panjang gelombang
antara 700 nm dan 1 mm. Inframerah ditemukan secara tidak sengaja oleh
Sir William Herschell, astronom kerajaan Inggris ketika ia sedang mengadakan
penelitian mencari bahan penyaring optik yang akan digunakan untuk mengurangi
kecerahan gambar matahari dalam tata surya teleskop. Jenis-jenis inframerah
berdasarkan panjang gelombang yaitu inframerah jarak dekat dengan panjang
gelombang 0.75 – 1.5 µm, inframerah jarak menengah dengan panjang gelombang
11
efek fotoelektrik dari metal dan efek multiplikasi gas. Ukurannya kecil tetapi
memiliki sensitivitas angular yang lebar dan dapat mendeteksi radiasi ultraviolet
yang ditransmisikan oleh api secara cepat dengan pemanfaatan katode dari besi.
Detektor ini dapat mendeteksi nyala api lilin dari jarak lebih dari 5 meter. Dengan
rangkaian driver maka sensor ini akan dapat mengeluarkan suatu output sinyal
yang berupa pulsa kotak dengan amplituda 5 V apabila sensor mendeteksi
keberadaan sinar UV. Bahkan dengan rangkaian ini maka error yang disebabkan
karena pendeteksian noise seperti cahaya matahari dapat dihilangkan, Daerah
sensitivitas angular sensor seperti pada gambar 5.
Gambar 5. Sensitivitas angular sensor
2.6 InframerahInframerah adalah radiasi elektromagnetik dari panjang gelombang lebih
panjang dari cahaya tampak, tetapi lebih pendek dari radiasi gelombang radio.
Namanya berarti "bawah merah" (dari bahasa Latin infra, "bawah"), merah
merupakan warna dari cahaya tampak dengan gelombang terpanjang. Radiasi
inframerah memiliki jangkauan tiga "order" dan memiliki panjang gelombang
antara 700 nm dan 1 mm. Inframerah ditemukan secara tidak sengaja oleh
Sir William Herschell, astronom kerajaan Inggris ketika ia sedang mengadakan
penelitian mencari bahan penyaring optik yang akan digunakan untuk mengurangi
kecerahan gambar matahari dalam tata surya teleskop. Jenis-jenis inframerah
berdasarkan panjang gelombang yaitu inframerah jarak dekat dengan panjang
gelombang 0.75 – 1.5 µm, inframerah jarak menengah dengan panjang gelombang
12
1.50 – 10 µm dan inframerah jarak jauh dengan panjang gelombang 10 – 100 µm
(http://id.wikipedia.org).
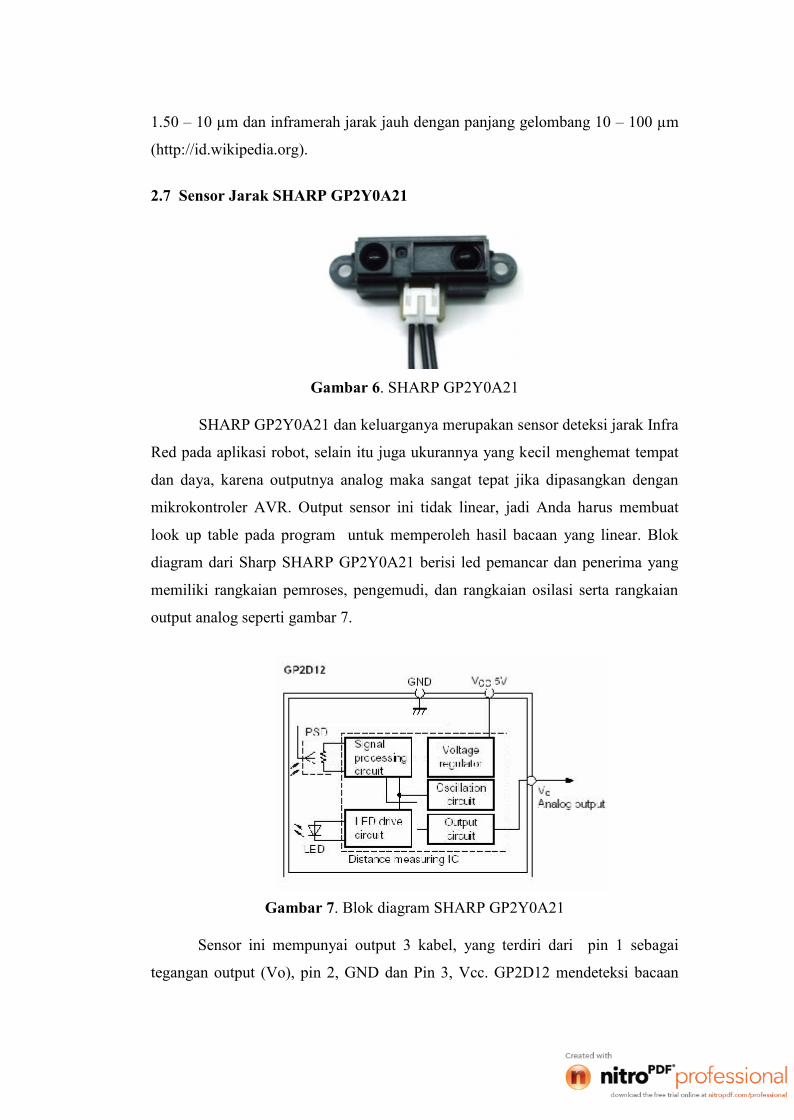
2.7 Sensor Jarak SHARP GP2Y0A21
Gambar 6. SHARP GP2Y0A21
SHARP GP2Y0A21 dan keluarganya merupakan sensor deteksi jarak Infra
Red pada aplikasi robot, selain itu juga ukurannya yang kecil menghemat tempat
dan daya, karena outputnya analog maka sangat tepat jika dipasangkan dengan
mikrokontroler AVR. Output sensor ini tidak linear, jadi Anda harus membuat
look up table pada program untuk memperoleh hasil bacaan yang linear. Blok
diagram dari Sharp SHARP GP2Y0A21 berisi led pemancar dan penerima yang
memiliki rangkaian pemroses, pengemudi, dan rangkaian osilasi serta rangkaian
output analog seperti gambar 7.
Gambar 7. Blok diagram SHARP GP2Y0A21
Sensor ini mempunyai output 3 kabel, yang terdiri dari pin 1 sebagai
tegangan output (Vo), pin 2, GND dan Pin 3, Vcc. GP2D12 mendeteksi bacaan
13
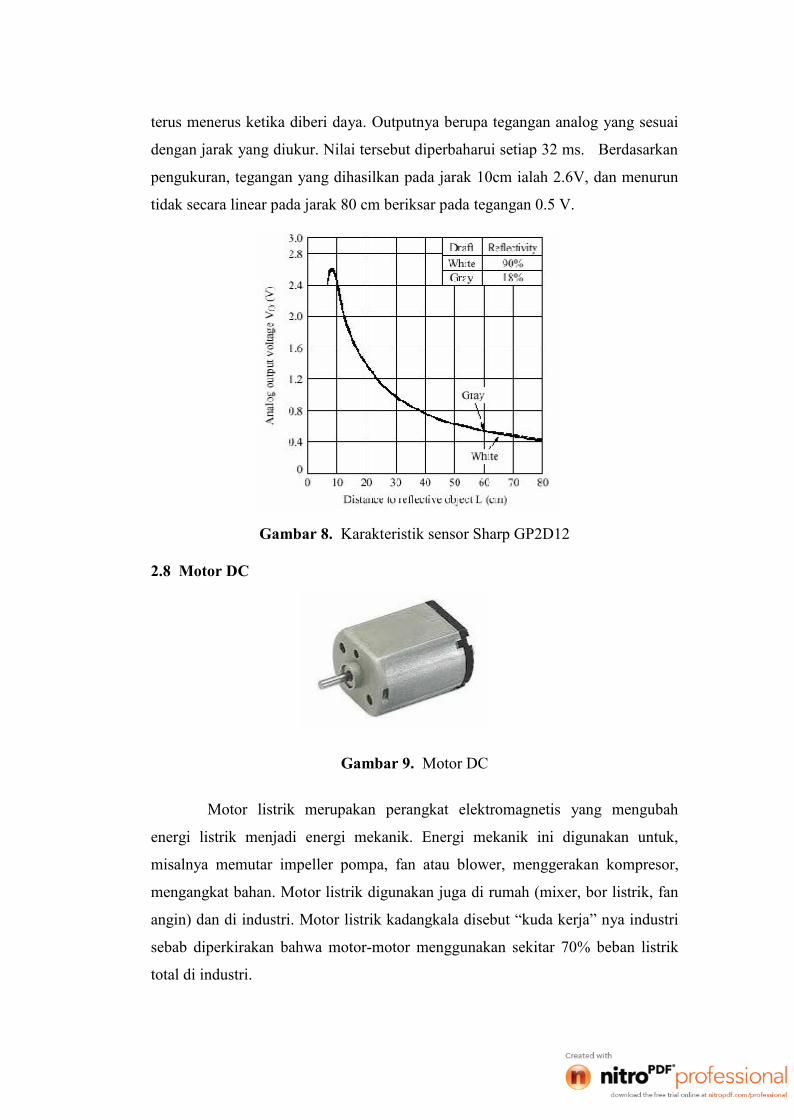
terus menerus ketika diberi daya. Outputnya berupa tegangan analog yang sesuai
dengan jarak yang diukur. Nilai tersebut diperbaharui setiap 32 ms. Berdasarkan
pengukuran, tegangan yang dihasilkan pada jarak 10cm ialah 2.6V, dan menurun
tidak secara linear pada jarak 80 cm beriksar pada tegangan 0.5 V.
Gambar 8. Karakteristik sensor Sharp GP2D12
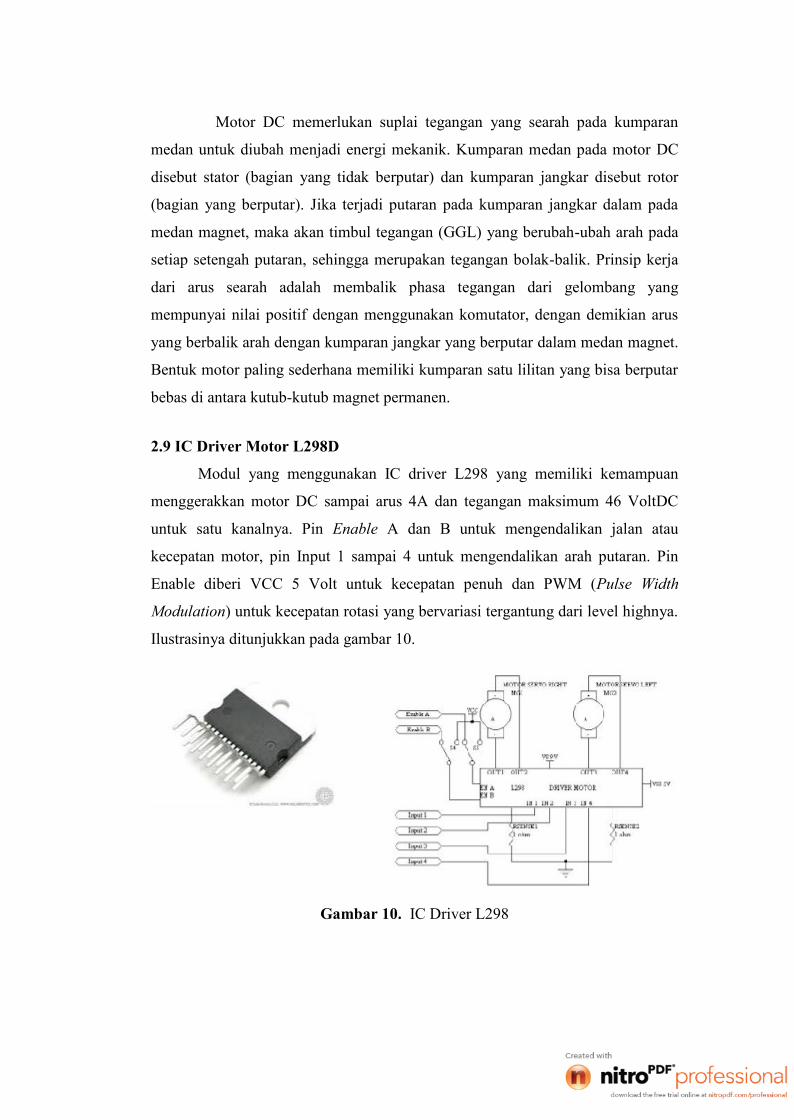
2.8 Motor DC
Gambar 9. Motor DC
Motor listrik merupakan perangkat elektromagnetis yang mengubah
energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk,
misalnya memutar impeller pompa, fan atau blower, menggerakan kompresor,
mengangkat bahan. Motor listrik digunakan juga di rumah (mixer, bor listrik, fan
angin) dan di industri. Motor listrik kadangkala disebut “kuda kerja” nya industri
sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik
total di industri.
14
Motor DC memerlukan suplai tegangan yang searah pada kumparan
medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor DC
disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor
(bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada
medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada
setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja
dari arus searah adalah membalik phasa tegangan dari gelombang yang
mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus
yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet.
Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar
bebas di antara kutub-kutub magnet permanen.
2.9 IC Driver Motor L298D
Modul yang menggunakan IC driver L298 yang memiliki kemampuan
menggerakkan motor DC sampai arus 4A dan tegangan maksimum 46 VoltDC
untuk satu kanalnya. Pin Enable A dan B untuk mengendalikan jalan atau
kecepatan motor, pin Input 1 sampai 4 untuk mengendalikan arah putaran. Pin
Enable diberi VCC 5 Volt untuk kecepatan penuh dan PWM (Pulse Width
Modulation) untuk kecepatan rotasi yang bervariasi tergantung dari level highnya.
Ilustrasinya ditunjukkan pada gambar 10.
Gambar 10. IC Driver L298

15
2.10. Relay
Gambar 11. Relay 12V
Dalam dunia elektronika, relay dikenal sebagai komponen yang dapat
mengimplementasikan logika switching. Sebelum tahun 70an, relay merupakan
otak dari rangkaian pengendali. Baru setelah itu muncul PLC yang mulai
menggantikan posisi relay. Relay yang paling sederhana ialah relay
elektromekanis yang memberikan pergerakan mekanis saat mendapatkan energi
listrik. Secara sederhana relay elektromekanis ini di definisikan sebagai alat yang
menggunakan gaya elektromagnetik untuk menutup atau membuka kontak saklar
yang digerakkan secara mekanis oleh daya/energi listrik yang masuk sebagai
inputannya.
2.12 IC Regulator 7805
Salah satu metode agar dapat menghasilkan tegangan output DC stabil
adalah dengan menggunakan IC 78XX untuk tegangan positif dan IC 79XX untuk
tegangan negatif dalam sistem Regulator Tegangan. Di bawah ini adalah
besarnya tegangan output yang dapat dihasilkan IC regulator 78XX dan 79XX
dimana XX adalah angka yang menunjukan besar tegangan output stabil.
IC regulator tersebut akan bekerja sebagai regulator tegangan DC yang
stabil jika tegangan input di atas sama dengan atau lebih dari MIV (Minimum
Input Voltage), sedangkan arus maksimum beban output yang diperbolehkan
harus kurang dari atau sama dengan MC (Maximum Current) sesuai karakteristik
masing-masing.
16
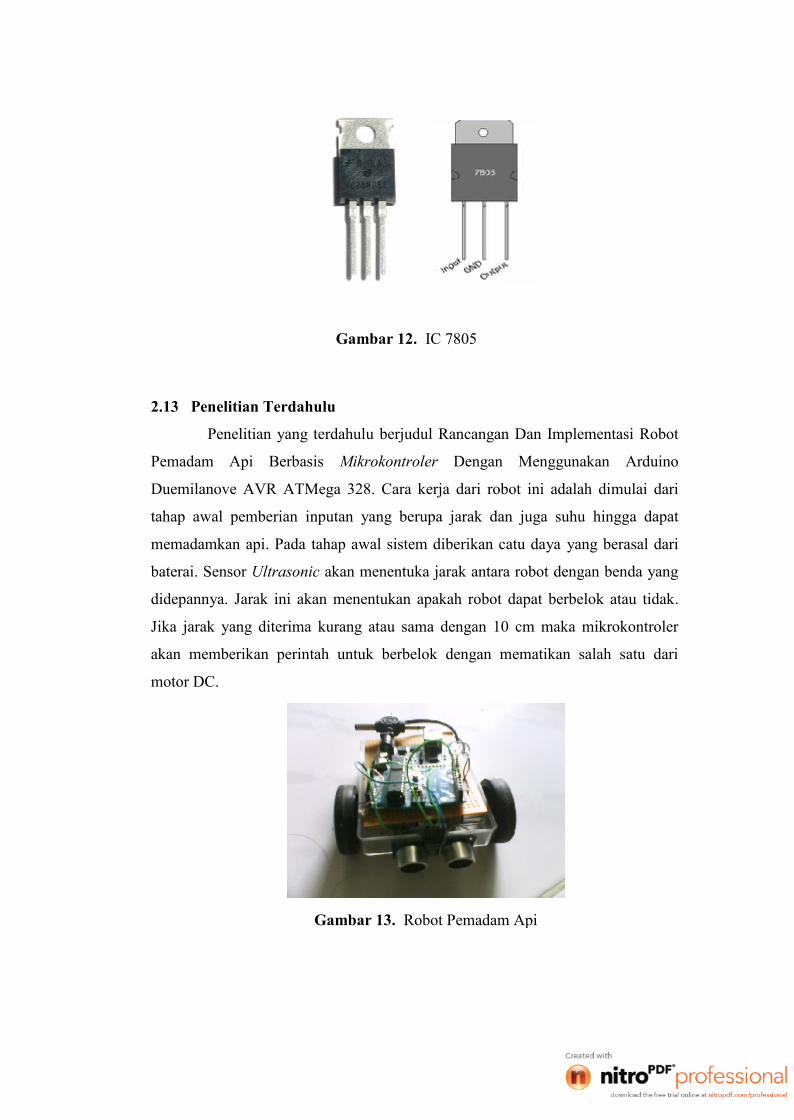
2.13 Penelitian Terdahulu
Penelitian yang terdahulu berjudul Rancangan Dan Implementasi Robot
Pemadam Api Berbasis Mikrokontroler Dengan Menggunakan Arduino
Duemilanove AVR ATMega 328. Cara kerja dari robot ini adalah dimulai dari
tahap awal pemberian inputan yang berupa jarak dan juga suhu hingga dapat
memadamkan api. Pada tahap awal sistem diberikan catu daya yang berasal dari
baterai. Sensor Ultrasonic akan menentuka jarak antara robot dengan benda yang
didepannya. Jarak ini akan menentukan apakah robot dapat berbelok atau tidak.
Jika jarak yang diterima kurang atau sama dengan 10 cm maka mikrokontroler
akan memberikan perintah untuk berbelok dengan mematikan salah satu dari
motor DC.
Gambar 12. IC 7805
Gambar 13. Robot Pemadam Api

17
Setelah jarak diketahui maka dapat membuat robot bergerak dan
menghindari halangan yang ada di depannya, sekarang sensor suhu akan
medeteksi suhu di sekitar. Dan apabila suhu yang terdeteksi melebihi atau sama
dengan 30oc maka robot mengira itulah titik api karena suhu yang ruangan
normal adalah berkisar antara 25-28oc, sehingga robot berhenti dan berusaha
mematikan api tersebut dengan mengirimkan perintah utuk menyalakan kipas
yang berada di depan robot.


















