Autogyro bui son tam
29
TRƯỜNG ĐẠI HỌC QUỐC GIA TP.HCM TRƯỜNG ĐẠI HỌC BÁCH KHOA BỘ MÔN KỸ THUẬT HÀNG KHÔNG -------- NGHIÊN CỨU THUYẾT TRÌNH BÁO CÁO ĐỀ TÀI THI ẾT KẾ AUTOGYRO MỘT CHỖ NGỒI GVGD : PGS TS NGUYỄN THIỆN TỐNG Lớp : GT11HK Họ và tên : Bùi Sơn Tâm MSSV : G1103016 Nhóm : Autogyro Nội dung đảm nhận: Nguyên lý hoạt động và cấu tạo autogyro TP Hồ Chí Minh, ngày 25 tháng 05 năm 2015
Transcript of Autogyro bui son tam
TRƯỜNG ĐẠI HỌC QUỐC GIA TP.HCM
TRƯỜNG ĐẠI HỌC BÁCH KHOA
BỘ MÔN KỸ THUẬT HÀNG KHÔNG
--------
NGHIÊN CỨU THUYẾT TRÌNH
BÁO CÁO ĐỀ TÀI
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
GVGD : PGS TS NGUYỄN THIỆN TỐNG
Lớp : GT11HK
Họ và tên : Bùi Sơn Tâm
MSSV : G1103016
Nhóm : Autogyro
Nội dung đảm nhận: Nguyên lý hoạt động và cấu tạo autogyro
TP Hồ Chí Minh, ngày 25 tháng 05 năm 2015
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 2
MỤC LỤC
DANH SÁCH HÌNH ẢNH ................................................................................................................................ 3
1 GIỚI THIỆU CHUNG VỀ AUTOGYRO .................................................................................................. 4
1.1 Lịch sử hình thành và phát triển autogyro .................................................................. 4
1.2 Giới thiệu về autogyro ................................................................................................ 5
1.3 Cấu tạo ........................................................................................................................ 8
2 NGUYÊN LÝ HOẠT ĐỘNG CỦA AUTOGYRO ................................................................................. 11
2.1 Các thành phần lực trên autogyro............................................................................. 12
2.2 Nguyên lý tự quay Autorotation ............................................................................... 14
2.2.1 Bay thẳng đứng......................................................................................................................... 14
2.2.2 Trường hợp bay tới ................................................................................................................... 17
2.3 Lý thuyết phần tử cánh ............................................................................................. 18
2.3.1 Trường hợp bay thẳng đứng ..................................................................................................... 18
3 NHU CẦU SỬ DỤNG AUTOGYRO TẠI VIỆT NAM .......................................................................... 21
4 TÍNH TOÁN CÔNG SUẤT ĐỘNG CƠ .................................................................................................. 22

THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 3
DANH SÁCH HÌNH ẢNH
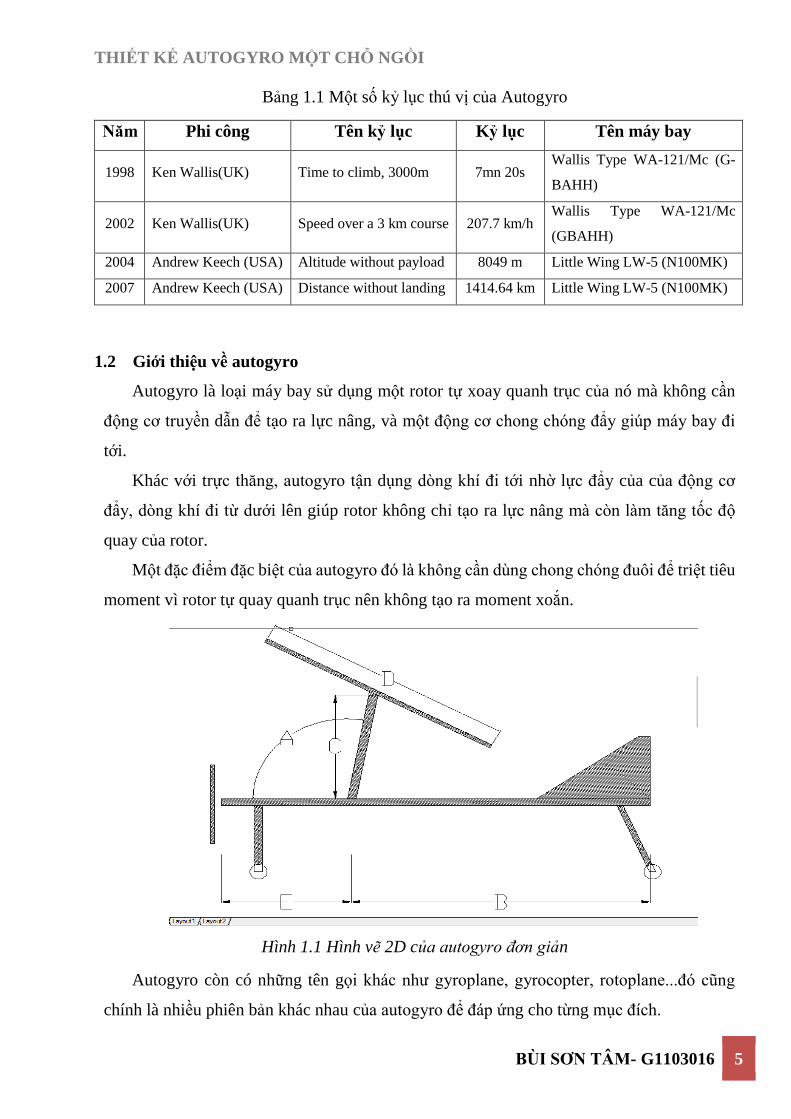
Hình 1.1 Hình vẽ 2D của autogyro đơn giản ........................................................................... 5
Hình 1.2 Autogyro loại kéo ..................................................................................................... 6
Hình 1.3 Autogyro loại đẩy được sử dụng thông dụng ngày nay ............................................ 6
Hình 1.4 Autogyro ................................................................................................................... 7
Hình 1.5 Helicopter .................................................................................................................. 7
Hình 1.6 Cấu tạo autogyro hiện đại ngày nay.......................................................................... 8
Hình 1.7 Hệ thống rotor Semirigid .......................................................................................... 8
Hình 1.8 Hệ thống rotor Fully articulated ................................................................................ 9
Hình 1.9 Aurtogyro với hệ thống đuôi đứng và ngang .......................................................... 10
Hình 2.1 Quá trình cất và hạ cánh của autogyro .................................................................... 11
Hình 2.2 Các lực tác dụng lên Autogyro ............................................................................... 12
Hình 2.3 Dòng khí đi qua airfoil ............................................................................................ 13
Hình 2.4 Lực nâng tạo ra trên autogyro ................................................................................. 13
Hình 2.5 Lực tác dụng trên các phương chiếu Autogyro....................................................... 14
Hình 2.6 Các vùng trên rotor khi hoạt động ở chế độ autorotation ....................................... 15
Hình 2.7 Các vùng trên rotor khi hoạt động ở chế độ autorotation thẳng đứng .................... 16
Hình 2.8 Các vùng trên rotor khi hoạt động ở chế độ autorotation đi tới .............................. 17
Hình 2.9 Góc và phương vị cánh trong mặt phẳng quay ....................................................... 18
Hình 2.10 Lực tác dụng lên một phần tử cánh khi autorotation thẳng đứng ......................... 19
Hình 3.1 Diện tích rừng, sự phân bố và độ che phủ rừng ở Việt Nam .................................. 21
Hình 4.1 Biểu đồ công suất bay bằng theo góc đặt cánh ....................................................... 24
Hình 4.2 Biểu đồ công suất cất cánh theo góc đặt cánh ........................................................ 24
Hình 4.3 Biểu đồ công suất động cơ theo góc đặt cánh ......................................................... 25
Hình 4.4 Công suất động cơ theo vận tốc bay tới .................................................................. 25
Hình 4.5 Động cơ Rotax 447 UL SCDI 40 HP ...................................................................... 26
Hình 4.6 Đồ thị công suất- số vòng quay động cơ Rotax 447 UL ......................................... 26
Hình 4.7 Đồ thị moment xoắn- số vòng quay động cơ Rotax 447 UL .................................. 27
Hình 4.8 Đồ thị suất tiêu hao nhiên liệu- số vòng quay động cơ Rotax 447 UL ................... 27

THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 4
1 GIỚI THIỆU CHUNG VỀ AUTOGYRO
1.1 Lịch sử hình thành và phát triển autogyro
Tóm tắt các mốc phát triển quan trọng:
˗ Năm 1923, kỹ sư xây dựng người Tây Ban Nha, Juan de la Cierva đã thiết kế thành
công Autogiro có tốc độ bay thấp và an toàn hơn máy bay thông thường sau tai nạn của
chiếc máy bay ném bom(C1, C2, C3) được ông thiết kế trước đó.
˗ Năm 1929, Engelbert Zaschka, một kỹ sư tiên phong của Đức đã kết hợp cánh bằng vào
autogyro, giải quyết vấn đề ổn định, điều khiển, tuy nhiên không hiệu quả trong việc
chạy đà, cất cánh thẳng đứng.
˗ Trong thế chiến thứ II, một số máy bay thiết kế dựa trên nguyên lý của autogyro được
sử dụng trong mục đích hiệu chỉnh các đài radar ven biển sau mỗi trận đánh như chiếc
Avro Rota autogyro của hoàng gia Anh. Hoặc được phát triển bởi đế quốc Nhật cho các
mục đích trinh sát, săn ngầm, tiêu diệt mục tiêu như chiếc Ka-1, ngoài ra autogyro đã
từng được trang bị cho tàu sân bay của quân đội Nhật.
˗ Phát triển sau chiến tranh, một số autogyro đã được cấp chứng chỉ khai thác hành khách
bởi FAA như chiếc: U-18/Air & Space 18A năm 1965, the Avian 2-180
Gyroplane năm 1967, and the McCulloch J-2 năm 1972 tuy nhiên tất cả đều thất bại
trong việc dân sự hóa vì kinh tế.
˗ Bensen Gyrocopter, một loại autogyro đơn giản hạng nhẹ, một chỗ ngồi nhưng được sử
dụng cho nhiều mục đích khác nhau, chính vì tính an toàn, tải nhẹ, giá thành thấp nên
loại này được ưa chuộng và phát triển đến ngày nay thay cho các mục đích quân sự như
ngày xưa.
˗ Ngày nay, autogyro chủ yếu được sử dụng nhiều trong mục đích thể thao, và nguyên lý
của nó được nghiên cứu và tích hợp trong trực thăng để tăng tính an toàn hơn. Một số
mẫu autogyro ưu việt trong mục đích thể thao đã được sử dụng rộng rãi trên toàn thế
giới như mẫu GBA’s Hawk 4, Eurocopter EC 120 B…
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 5
Bảng 1.1 Một số kỷ lục thú vị của Autogyro
Năm Phi công Tên kỷ lục Kỷ lục Tên máy bay
1998 Ken Wallis(UK) Time to climb, 3000m 7mn 20s Wallis Type WA-121/Mc (G-
BAHH)
2002 Ken Wallis(UK) Speed over a 3 km course 207.7 km/h Wallis Type WA-121/Mc
(GBAHH)
2004 Andrew Keech (USA) Altitude without payload 8049 m Little Wing LW-5 (N100MK)
2007 Andrew Keech (USA) Distance without landing 1414.64 km Little Wing LW-5 (N100MK)
1.2 Giới thiệu về autogyro
Autogyro là loại máy bay sử dụng một rotor tự xoay quanh trục của nó mà không cần
động cơ truyền dẫn để tạo ra lực nâng, và một động cơ chong chóng đẩy giúp máy bay đi
tới.
Khác với trực thăng, autogyro tận dụng dòng khí đi tới nhờ lực đẩy của của động cơ
đẩy, dòng khí đi từ dưới lên giúp rotor không chỉ tạo ra lực nâng mà còn làm tăng tốc độ
quay của rotor.
Một đặc điểm đặc biệt của autogyro đó là không cần dùng chong chóng đuôi để triệt tiêu
moment vì rotor tự quay quanh trục nên không tạo ra moment xoắn.
Hình 1.1 Hình vẽ 2D của autogyro đơn giản
Autogyro còn có những tên gọi khác như gyroplane, gyrocopter, rotoplane...đó cũng
chính là nhiều phiên bản khác nhau của autogyro để đáp ứng cho từng mục đích.
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 6
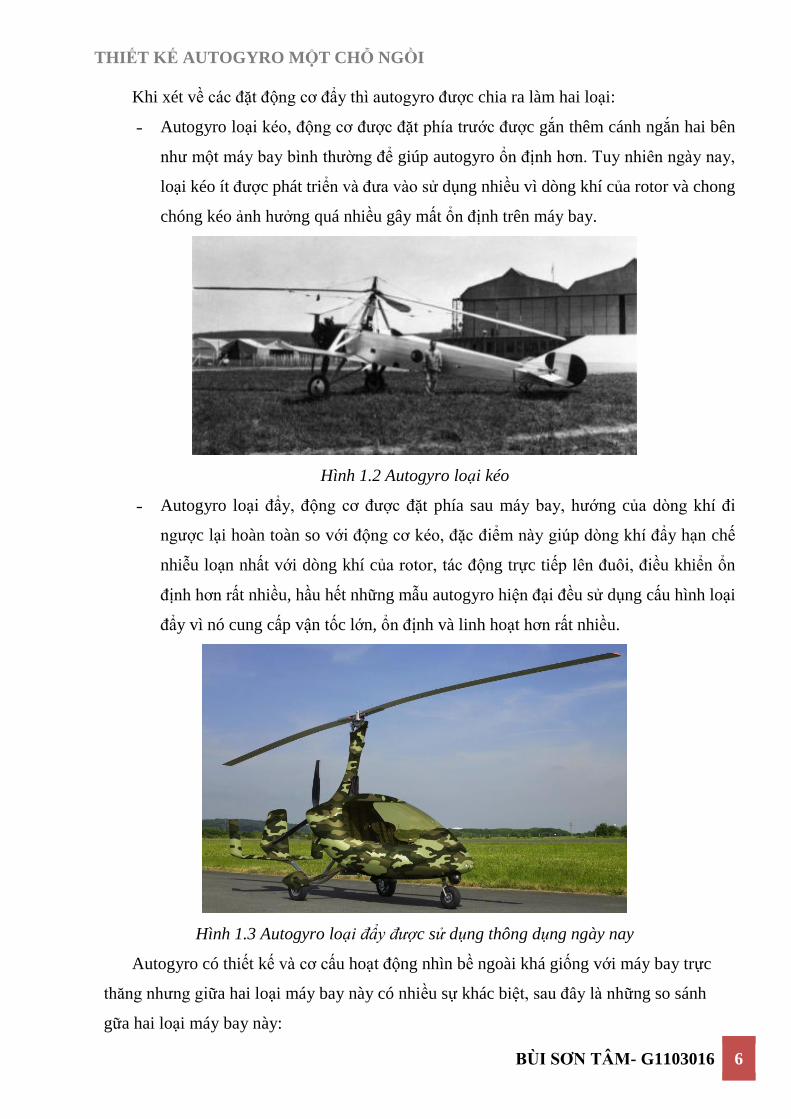
Khi xét về các đặt động cơ đẩy thì autogyro được chia ra làm hai loại:
˗ Autogyro loại kéo, động cơ được đặt phía trước được gắn thêm cánh ngắn hai bên
như một máy bay bình thường để giúp autogyro ổn định hơn. Tuy nhiên ngày nay,
loại kéo ít được phát triển và đưa vào sử dụng nhiều vì dòng khí của rotor và chong
chóng kéo ảnh hưởng quá nhiều gây mất ổn định trên máy bay.
Hình 1.2 Autogyro loại kéo
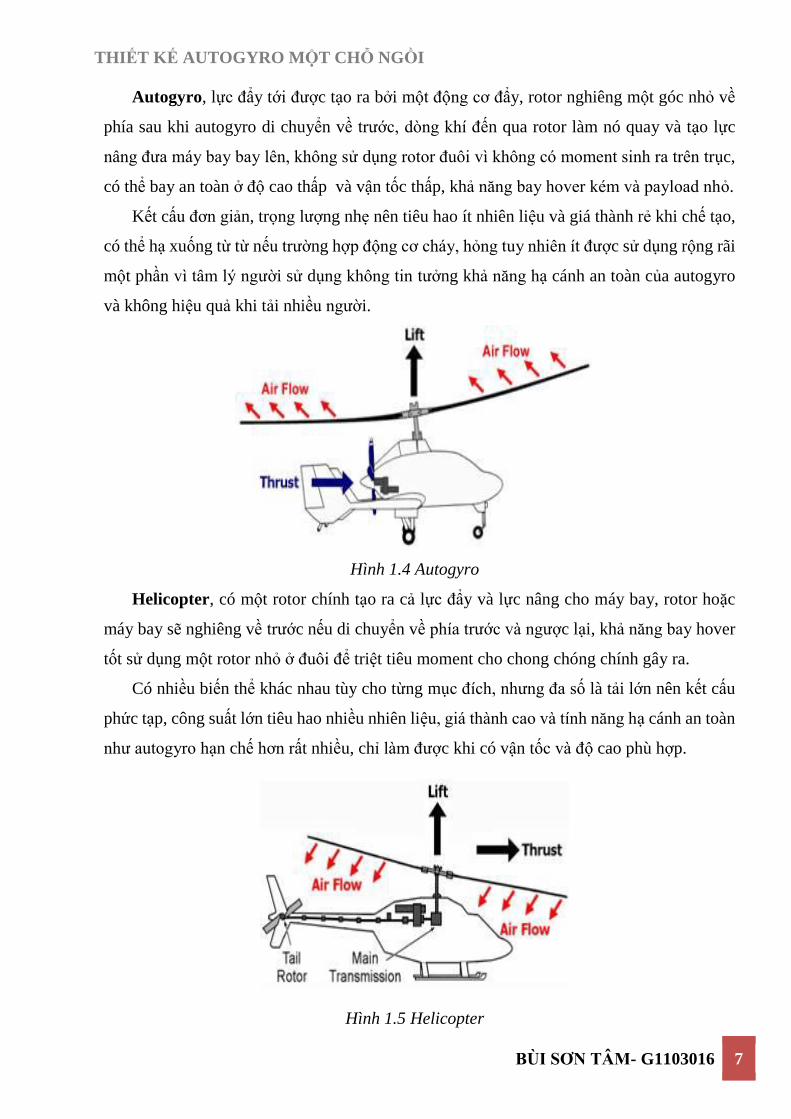
˗ Autogyro loại đẩy, động cơ được đặt phía sau máy bay, hướng của dòng khí đi
ngược lại hoàn toàn so với động cơ kéo, đặc điểm này giúp dòng khí đẩy hạn chế
nhiễu loạn nhất với dòng khí của rotor, tác động trực tiếp lên đuôi, điều khiển ổn
định hơn rất nhiều, hầu hết những mẫu autogyro hiện đại đều sử dụng cấu hình loại
đẩy vì nó cung cấp vận tốc lớn, ổn định và linh hoạt hơn rất nhiều.
Hình 1.3 Autogyro loại đẩy được sử dụng thông dụng ngày nay
Autogyro có thiết kế và cơ cấu hoạt động nhìn bề ngoài khá giống với máy bay trực
thăng nhưng giữa hai loại máy bay này có nhiều sự khác biệt, sau đây là những so sánh
gữa hai loại máy bay này:
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 7
Autogyro, lực đẩy tới được tạo ra bởi một động cơ đẩy, rotor nghiêng một góc nhỏ về
phía sau khi autogyro di chuyển về trước, dòng khí đến qua rotor làm nó quay và tạo lực
nâng đưa máy bay bay lên, không sử dụng rotor đuôi vì không có moment sinh ra trên trục,
có thể bay an toàn ở độ cao thấp và vận tốc thấp, khả năng bay hover kém và payload nhỏ.
Kết cấu đơn giản, trọng lượng nhẹ nên tiêu hao ít nhiên liệu và giá thành rẻ khi chế tạo,
có thể hạ xuống từ từ nếu trường hợp động cơ cháy, hỏng tuy nhiên ít được sử dụng rộng rãi
một phần vì tâm lý người sử dụng không tin tưởng khả năng hạ cánh an toàn của autogyro
và không hiệu quả khi tải nhiều người.
Hình 1.4 Autogyro
Helicopter, có một rotor chính tạo ra cả lực đẩy và lực nâng cho máy bay, rotor hoặc
máy bay sẽ nghiêng về trước nếu di chuyển về phía trước và ngược lại, khả năng bay hover
tốt sử dụng một rotor nhỏ ở đuôi để triệt tiêu moment cho chong chóng chính gây ra.
Có nhiều biến thể khác nhau tùy cho từng mục đích, nhưng đa số là tải lớn nên kết cấu
phức tạp, công suất lớn tiêu hao nhiều nhiên liệu, giá thành cao và tính năng hạ cánh an toàn
như autogyro hạn chế hơn rất nhiều, chỉ làm được khi có vận tốc và độ cao phù hợp.
Hình 1.5 Helicopter
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 8
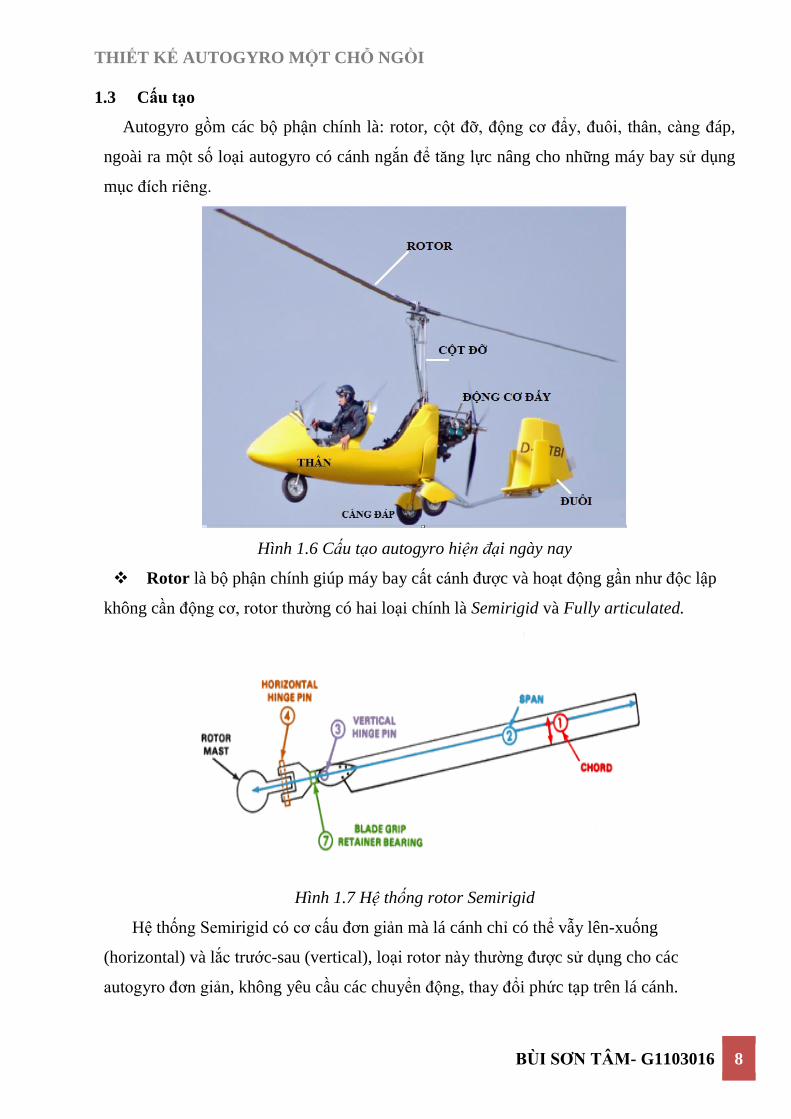
1.3 Cấu tạo
Autogyro gồm các bộ phận chính là: rotor, cột đỡ, động cơ đẩy, đuôi, thân, càng đáp,
ngoài ra một số loại autogyro có cánh ngắn để tăng lực nâng cho những máy bay sử dụng
mục đích riêng.
Hình 1.6 Cấu tạo autogyro hiện đại ngày nay
Rotor là bộ phận chính giúp máy bay cất cánh được và hoạt động gần như độc lập
không cần động cơ, rotor thường có hai loại chính là Semirigid và Fully articulated.
Hình 1.7 Hệ thống rotor Semirigid
Hệ thống Semirigid có cơ cấu đơn giản mà lá cánh chỉ có thể vẫy lên-xuống
(horizontal) và lắc trước-sau (vertical), loại rotor này thường được sử dụng cho các
autogyro đơn giản, không yêu cầu các chuyển động, thay đổi phức tạp trên lá cánh.

THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 9
Hình 1.8 Hệ thống rotor Fully articulated
Hệ thông Full articulated thì phức tạp hơn với khả năng thay đổi được góc pitch lá
cánh, giúp máy bay thay đổi lực nâng phù hợp với từng nhiệm vụ thực hiện, loại này được
sử dụng cho các thiết kế thương mại, thể thao hiện đại.
Rotor thường có hai lá cánh hoặc có thể nhiều hơn tùy vào yêu cầu của thiết kế, các lá
cánh được nối trục bằng khớp bản lề, có nhiều loại bản lề như flapping, bản lề lead-lag,
bản lề feathring.
Bản lề lead-lag cho phép lá cánh rotor quay trong cùng mặt phẳng quay của rotor, và
cho phép bất cứ sự thay đổi nào về vận tốc quay của rotor dựa vào bản lề flapping.
Bản lề fearing cho phép góc pitch của lá cánh điều chỉnh được tùy thuộc vào lực nâng
cần thiết cho từng trường hợp.
Ngoài ra một số autogyro hiện đại ngày nay, chong chóng sẽ được kết nối với động cơ,
điều này giúp rotor quay trong khi nó vẫn đứng yên trên mặt đất, máy bay gần như có thể
cất cánh thẳng đứng. Bên cạnh đó góc pitch của lá cánh cũng được thay đổi để tăng lực
nâng lúc cất cánh.
Cột đỡ, thân, càng đáp autogyro
Cột đỡ là phần kết nối thân máy bay với đĩa rotor
Thân có nhiệm vụ là kết nối các bộ phận của gyroplane lại, được thiết kế sao cho khối
lượng nhẹ nhất, chắc chắn, và lực cản thấp
Càng đáp bao gồm cả bánh xe cho phép autogyro có thể di chuyển trên địa hình mặt
đất, thường những chiếc autogyro sau này được thiết kế chỉ có 3 bánh, hai bánh sau và 1
bánh trước.

THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 10
Đuôi là bề mặt điều khiển chính của gyroplane,vì không có cánh như máy bay nên
phần đuôi có ảnh hưởng rất lớn đến việc ổn đinh của máy bay gồm đuôi ngang và đuôi
đứng.
Đuôi đứng cho phép điều khiển hướng máy bay và ổn định thân, động cơ đẩy cũng sẽ
cần rudder để bù đắp ảnh hưởng yawing
Đuôi ngang giúp máy bay ổn định khi bay nhanh, lực cản và lực đảy lớn, khi đó máy
bay sẽ dễ bị mất ổn định khi có gió giật.
Hình 1.9 Aurtogyro với hệ thống đuôi đứng và ngang
Động cơ đẩy có thể sử dụng động cơ đốt trong hoặc động cơ phản lực, cung cấp lực
đẩy cần thiết để autogyro di chuyển về phía trước. Ngoài ra động cơ cũng có thể liên kết
với chong chóng, cung cấp vận tốc đầu để chong chóng quay lúc di chuyển trên mặt đất,
khả năng cất cánh thẳng đứng tốt hơn.
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 11
2 NGUYÊN LÝ HOẠT ĐỘNG CỦA AUTOGYRO
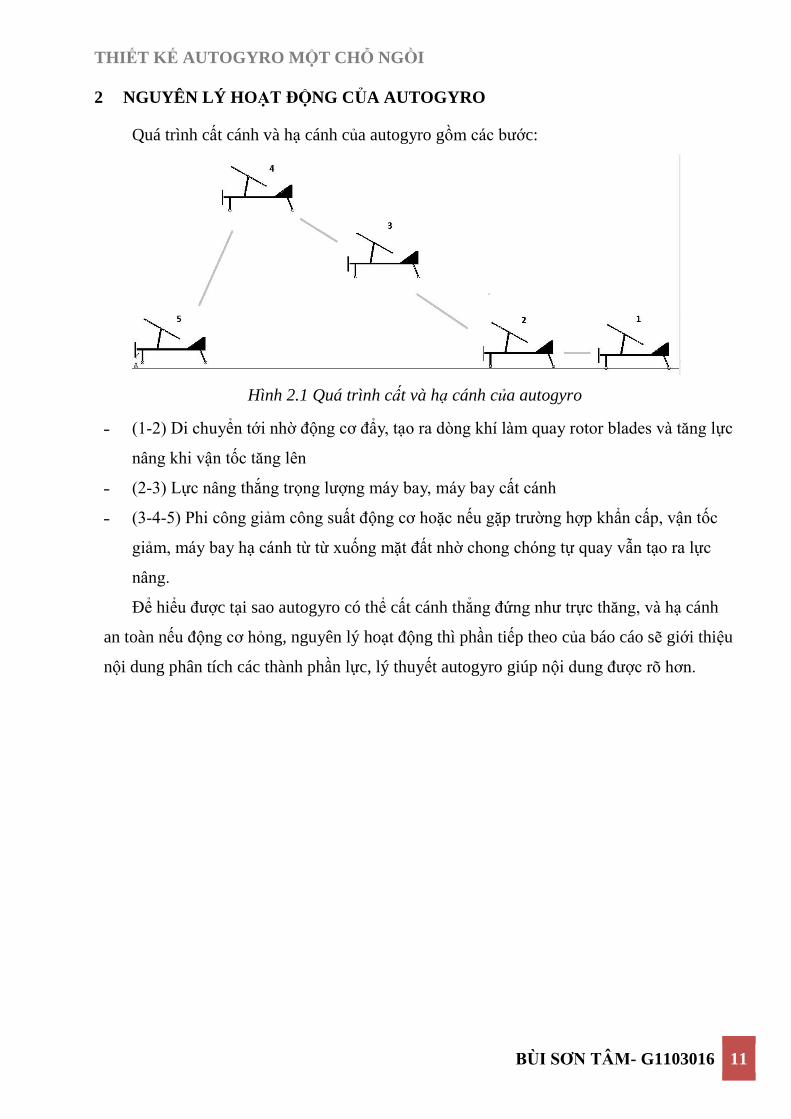
Quá trình cất cánh và hạ cánh của autogyro gồm các bước:
Hình 2.1 Quá trình cất và hạ cánh của autogyro
˗ (1-2) Di chuyển tới nhờ động cơ đẩy, tạo ra dòng khí làm quay rotor blades và tăng lực
nâng khi vận tốc tăng lên
˗ (2-3) Lực nâng thắng trọng lượng máy bay, máy bay cất cánh
˗ (3-4-5) Phi công giảm công suất động cơ hoặc nếu gặp trường hợp khẩn cấp, vận tốc
giảm, máy bay hạ cánh từ từ xuống mặt đất nhờ chong chóng tự quay vẫn tạo ra lực
nâng.
Để hiểu được tại sao autogyro có thể cất cánh thẳng đứng như trực thăng, và hạ cánh
an toàn nếu động cơ hỏng, nguyên lý hoạt động thì phần tiếp theo của báo cáo sẽ giới thiệu
nội dung phân tích các thành phần lực, lý thuyết autogyro giúp nội dung được rõ hơn.
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 12
2.1 Các thành phần lực trên autogyro
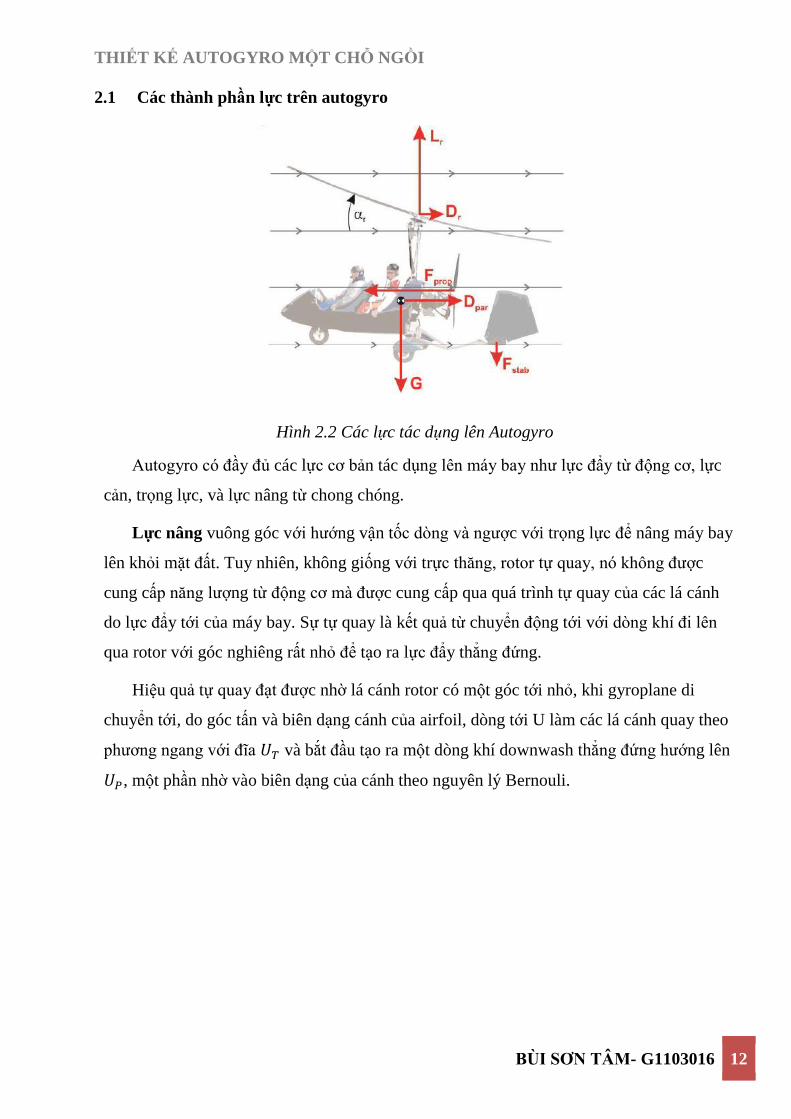
Hình 2.2 Các lực tác dụng lên Autogyro
Autogyro có đầy đủ các lực cơ bản tác dụng lên máy bay như lực đẩy từ động cơ, lực
cản, trọng lực, và lực nâng từ chong chóng.
Lực nâng vuông góc với hướng vận tốc dòng và ngược với trọng lực để nâng máy bay
lên khỏi mặt đất. Tuy nhiên, không giống với trực thăng, rotor tự quay, nó không được
cung cấp năng lượng từ động cơ mà được cung cấp qua quá trình tự quay của các lá cánh
do lực đẩy tới của máy bay. Sự tự quay là kết quả từ chuyển động tới với dòng khí đi lên
qua rotor với góc nghiêng rất nhỏ để tạo ra lực đẩy thẳng đứng.
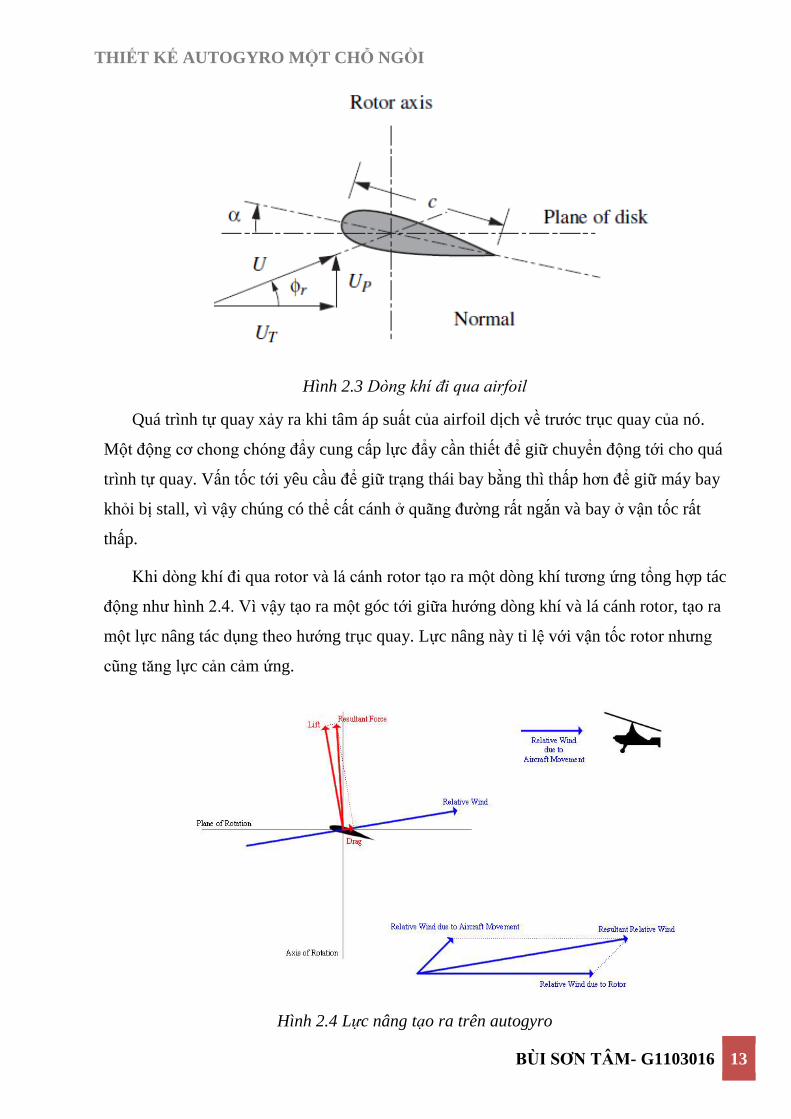
Hiệu quả tự quay đạt được nhờ lá cánh rotor có một góc tới nhỏ, khi gyroplane di
chuyển tới, do góc tấn và biên dạng cánh của airfoil, dòng tới U làm các lá cánh quay theo
phương ngang với đĩa 𝑈𝑇 và bắt đầu tạo ra một dòng khí downwash thẳng đứng hướng lên
𝑈𝑃, một phần nhờ vào biên dạng của cánh theo nguyên lý Bernouli.
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 13
Hình 2.3 Dòng khí đi qua airfoil
Quá trình tự quay xảy ra khi tâm áp suất của airfoil dịch về trước trục quay của nó.
Một động cơ chong chóng đẩy cung cấp lực đẩy cần thiết để giữ chuyển động tới cho quá
trình tự quay. Vấn tốc tới yêu cầu để giữ trạng thái bay bằng thì thấp hơn để giữ máy bay
khỏi bị stall, vì vậy chúng có thể cất cánh ở quãng đường rất ngắn và bay ở vận tốc rất
thấp.
Khi dòng khí đi qua rotor và lá cánh rotor tạo ra một dòng khí tương ứng tổng hợp tác
động như hình 2.4. Vì vậy tạo ra một góc tới giữa hướng dòng khí và lá cánh rotor, tạo ra
một lực nâng tác dụng theo hướng trục quay. Lực nâng này tỉ lệ với vận tốc rotor nhưng
cũng tăng lực cản cảm ứng.
Hình 2.4 Lực nâng tạo ra trên autogyro
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 14
Lực đẩy là nguồn năng lượng chính của autogyro, được định nghĩa là thành phần lực
của chong chóng đẩy song song với dòng khí tới. Giống như các thành phần lực khác, lực
đẩy có tác dụng do với trọng tâm của máy bay. Trong khi bay, lực đẩy của rotor được tạo
ra do chong chóng quay với vận tốc cao, điều này tạo ra một moment có xu hướng làm
quay thân máy bay lệch khỏi phương thẳng đứng vài độ. Khi đang bay thì không có cơ cấu
nào kết hợp giữa động cơ đẩy và rotor, thường thì khi giảm công suất động cơ sẽ làm tăng
tốc độ của rotor khi giảm công suất thì máy bay đi xuống làm tăng góc tới.
Hình 2.5 Lực tác dụng trên các phương chiếu Autogyro
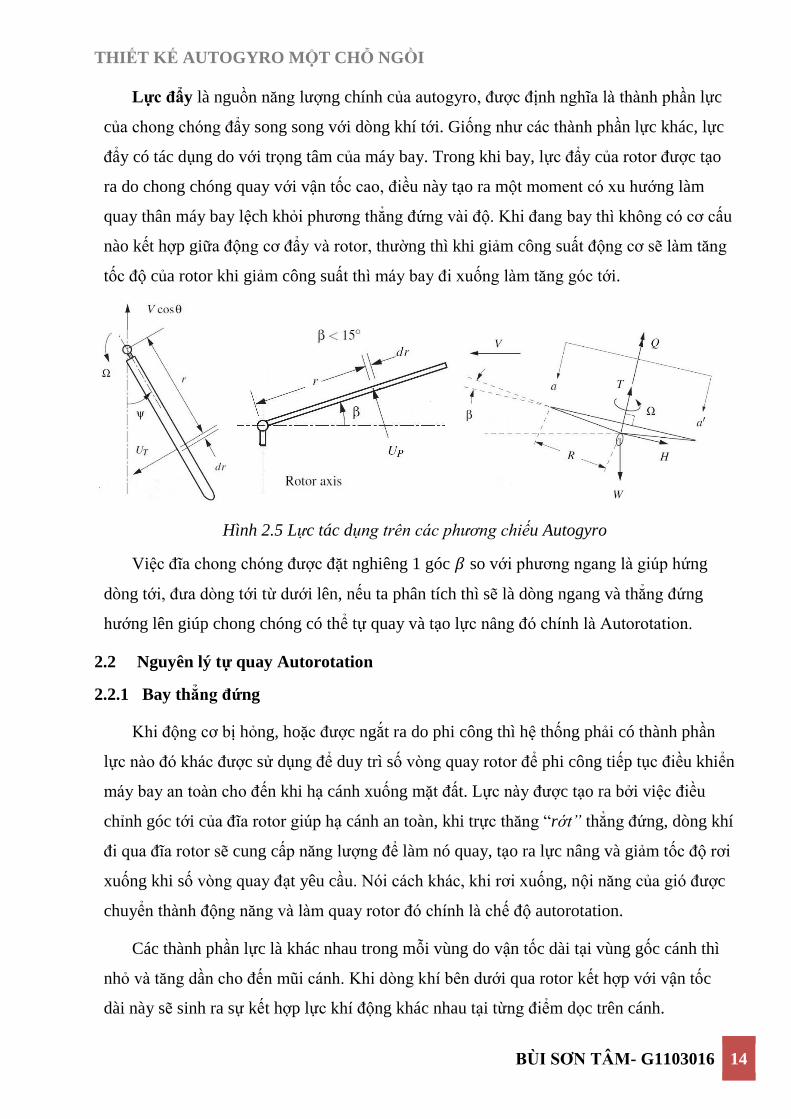
Việc đĩa chong chóng được đặt nghiêng 1 góc 𝛽 so với phương ngang là giúp hứng
dòng tới, đưa dòng tới từ dưới lên, nếu ta phân tích thì sẽ là dòng ngang và thẳng đứng
hướng lên giúp chong chóng có thể tự quay và tạo lực nâng đó chính là Autorotation.
2.2 Nguyên lý tự quay Autorotation
2.2.1 Bay thẳng đứng
Khi động cơ bị hỏng, hoặc được ngắt ra do phi công thì hệ thống phải có thành phần
lực nào đó khác được sử dụng để duy trì số vòng quay rotor để phi công tiếp tục điều khiển
máy bay an toàn cho đến khi hạ cánh xuống mặt đất. Lực này được tạo ra bởi việc điều
chỉnh góc tới của đĩa rotor giúp hạ cánh an toàn, khi trực thăng “rớt” thẳng đứng, dòng khí
đi qua đĩa rotor sẽ cung cấp năng lượng để làm nó quay, tạo ra lực nâng và giảm tốc độ rơi
xuống khi số vòng quay đạt yêu cầu. Nói cách khác, khi rơi xuống, nội năng của gió được
chuyển thành động năng và làm quay rotor đó chính là chế độ autorotation.
Các thành phần lực là khác nhau trong mỗi vùng do vận tốc dài tại vùng gốc cánh thì
nhỏ và tăng dần cho đến mũi cánh. Khi dòng khí bên dưới qua rotor kết hợp với vận tốc
dài này sẽ sinh ra sự kết hợp lực khí động khác nhau tại từng điểm dọc trên cánh.
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 15
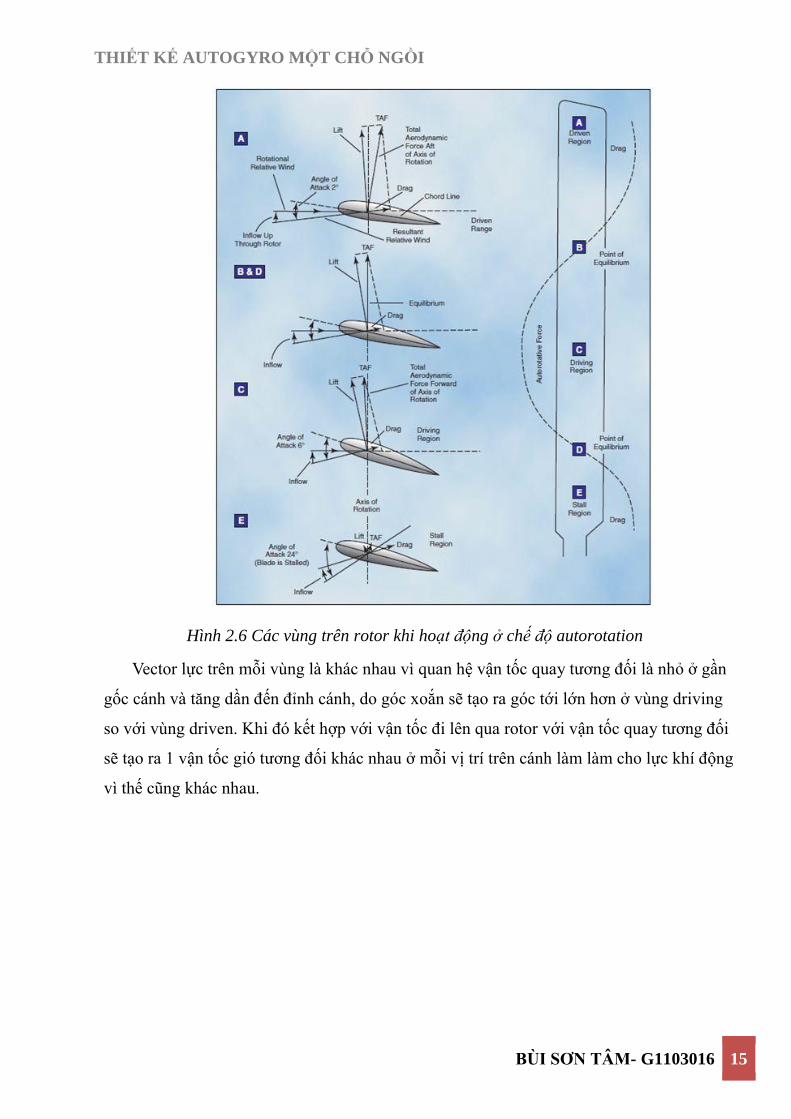
Hình 2.6 Các vùng trên rotor khi hoạt động ở chế độ autorotation
Vector lực trên mỗi vùng là khác nhau vì quan hệ vận tốc quay tương đối là nhỏ ở gần
gốc cánh và tăng dần đến đỉnh cánh, do góc xoắn sẽ tạo ra góc tới lớn hơn ở vùng driving
so với vùng driven. Khi đó kết hợp với vận tốc đi lên qua rotor với vận tốc quay tương đối
sẽ tạo ra 1 vận tốc gió tương đối khác nhau ở mỗi vị trí trên cánh làm làm cho lực khí động
vì thế cũng khác nhau.
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 16
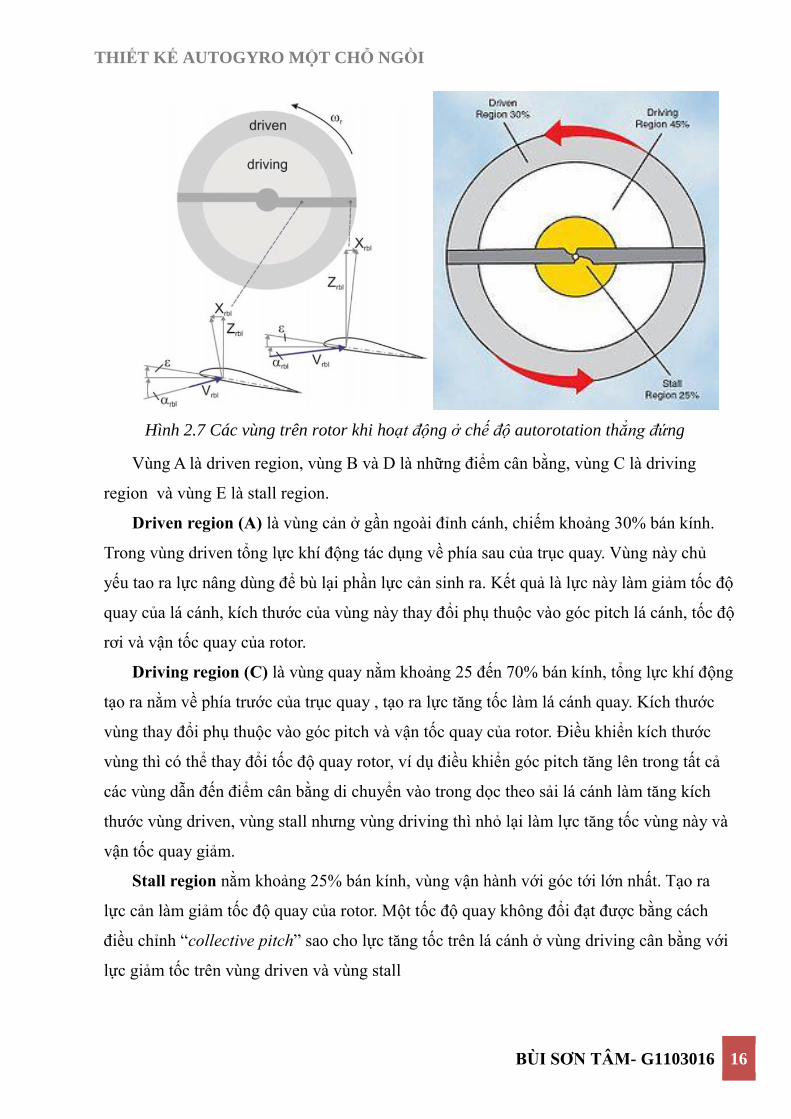
Hình 2.7 Các vùng trên rotor khi hoạt động ở chế độ autorotation thẳng đứng
Vùng A là driven region, vùng B và D là những điểm cân bằng, vùng C là driving
region và vùng E là stall region.
Driven region (A) là vùng cản ở gần ngoài đỉnh cánh, chiếm khoảng 30% bán kính.
Trong vùng driven tổng lực khí động tác dụng về phía sau của trục quay. Vùng này chủ
yếu tao ra lực nâng dùng để bù lại phần lực cản sinh ra. Kết quả là lực này làm giảm tốc độ
quay của lá cánh, kích thước của vùng này thay đổi phụ thuộc vào góc pitch lá cánh, tốc độ
rơi và vận tốc quay của rotor.
Driving region (C) là vùng quay nằm khoảng 25 đến 70% bán kính, tổng lực khí động
tạo ra nằm về phía trước của trục quay , tạo ra lực tăng tốc làm lá cánh quay. Kích thước
vùng thay đổi phụ thuộc vào góc pitch và vận tốc quay của rotor. Điều khiển kích thước
vùng thì có thể thay đổi tốc độ quay rotor, ví dụ điều khiển góc pitch tăng lên trong tất cả
các vùng dẫn đến điểm cân bằng di chuyển vào trong dọc theo sải lá cánh làm tăng kích
thước vùng driven, vùng stall nhưng vùng driving thì nhỏ lại làm lực tăng tốc vùng này và
vận tốc quay giảm.
Stall region nằm khoảng 25% bán kính, vùng vận hành với góc tới lớn nhất. Tạo ra
lực cản làm giảm tốc độ quay của rotor. Một tốc độ quay không đổi đạt được bằng cách
điều chỉnh “collective pitch” sao cho lực tăng tốc trên lá cánh ở vùng driving cân bằng với
lực giảm tốc trên vùng driven và vùng stall

THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 17
Hai điểm cân bằng B,D có tổng lực tác dụng lên lá cánh trùng với trục quay. Lực nâng
và lực cản được tạo ra nhưng không có thành phần nào làm cho lá cánh tăng tốc hoặc giảm
tốc.
Phi công sẽ điều chỉnh kích thước của ba vùng này để thay đổi số vòng quay rotor,
điều này dẫn đến điểm cân bằng sẽ di chuyển ra phía trước mũi cánh, và làm giảm vùng
cản. Vùng quay và vùng stall đều di chuyển tạo ra lực cản hơn hơn làm cho số vòng quay
giảm lại. Do đó rotor đạt được số vòng quay cố định, phải điều chỉnh góc dòng khí tới lá
cánh để lực tăng tốc từ vùng quay và lực giảm tốc từ vùng cản và stall là cân bằng nhau.
2.2.2 Trường hợp bay tới
Tương tự như trường hợp bay thẳng đứng, tuy nhiên vận tốc bay tới thay đổi dòng khí
đi lên qua đĩa rotor nên vùng quay và vùng stall di chuyển lệch sang lá cánh quay ngược so
với phương bay tới, nơi mà góc tới của dòng khí lớn hơn.
Vì bên lá cánh quay cùng chiều với phương đi tới nên có góc tới nhỏ hơn, bên kia là
vùng quay lùi, các lá cánh có vung stall lớn, và một phần nhỏ gần gốc cánh rơi vào vùng
“đảo ngược dòng” do đó kích thước của vùng cản lại được giảm xuống.
Hình 2.8 Các vùng trên rotor khi hoạt động ở chế độ autorotation đi tới

THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 18
2.3 Lý thuyết phần tử cánh
2.3.1 Trường hợp bay thẳng đứng
Ta xét một biên dạng ở vị trí bán kính r tình từ trục quay, tại thời điểm đang xét, cánh
đang có góc 𝝍 so với trục sau. Biên dạng cánh này là bất kỳ, trước tiên ta xem xét khí động
học cảu phần tử cánh này, sau đó tích phân lên toàn bộ cánh.
Trước tiên ta xét trạng thái bay steady vertical descent. Trong trường hợp này không cso
vận tốc tới, động cơ không được cung cấp lực đẩy (tắt động cơ), rotor lúc này đóng vai trò
như một chiếc dù.
Hình 2.9 Góc và phương vị cánh trong mặt phẳng quay
Với các góc tới nhỏ, các trạng thái không đổi (vận tốc quay, vận tốc tới), rotor chịu tất cả
các tải lực khí động, ảnh hưởng của lá cánh (blade flapping được bỏ qua)
Góc tới khí động được tính theo công thức:
𝜶𝒂 = 𝒂𝒓𝒄𝒕𝒂𝒏𝒗∞−𝒗𝒊
𝛀𝒓
Trong đó 𝒗∞ là vận tốc descent, 𝒗𝒊 là vận tốc cảm ứng, 𝛀𝒓 là vận tốc do chong chóng
quay
Vì góc tới nhỏ nên 𝜶𝒂 =𝒗∞−𝒗𝒊
𝛀𝒓
Kết hợp góc đặt cánh và góc khí động ta tìm được góc tới cục bộ
𝜶𝒍𝒐𝒄 =𝒗∞ − 𝒗𝒊𝛀𝒓
+ 𝜽
Vận tốc tới cánh cục bộ là
𝒗𝒍𝒐𝒄 = 𝒄𝒍𝒍𝒐𝒄.𝟏
𝟐. 𝝆. 𝒗𝒍𝒐𝒄
𝟐 . 𝒄
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 19
Nếu giả sử chord cánh là hằng số dọc theo bán kính, thì với biên dạng cánh đối xứng
và góc tới nhỏ ta có thể tính hệ số lực nâng theo công thức:
𝒄𝒍𝒍𝒐𝒄 = 𝟐𝝅𝜶𝒍𝒐𝒄
Và khi đó lực cục bộ là:
𝒍𝒍𝒐𝒄 =𝒑. 𝒄
𝟐. 𝟐𝝅.𝛀𝒓. (𝜽. 𝛀𝒓 + 𝒗∞ − 𝒗𝒊)
Tương tự ta tính lực cản trên một đơn vị chiều dài
𝑑𝒍𝒐𝒄 = 𝑐𝑑.1
2𝜌𝑣𝑙𝑜𝑐
2 . 𝑐
𝑐𝑑𝒍𝒐𝒄 là hệ số lực cản cục bộ, chỉ phụ thuộc vào biên dạng cánh và góc tới, tuy nhiên
nếu góc tới nhỏ thì hệ số lực cản không thay đổi nhiều và có thể thay bằng hệ số lực cản
toàn thể cd. Công thức tính lực cản cục bộ bây giờ trở thành
𝑑𝒍𝒐𝒄 = 𝑐𝑑.1
2𝜌Ω2. 𝑟2. 𝑐
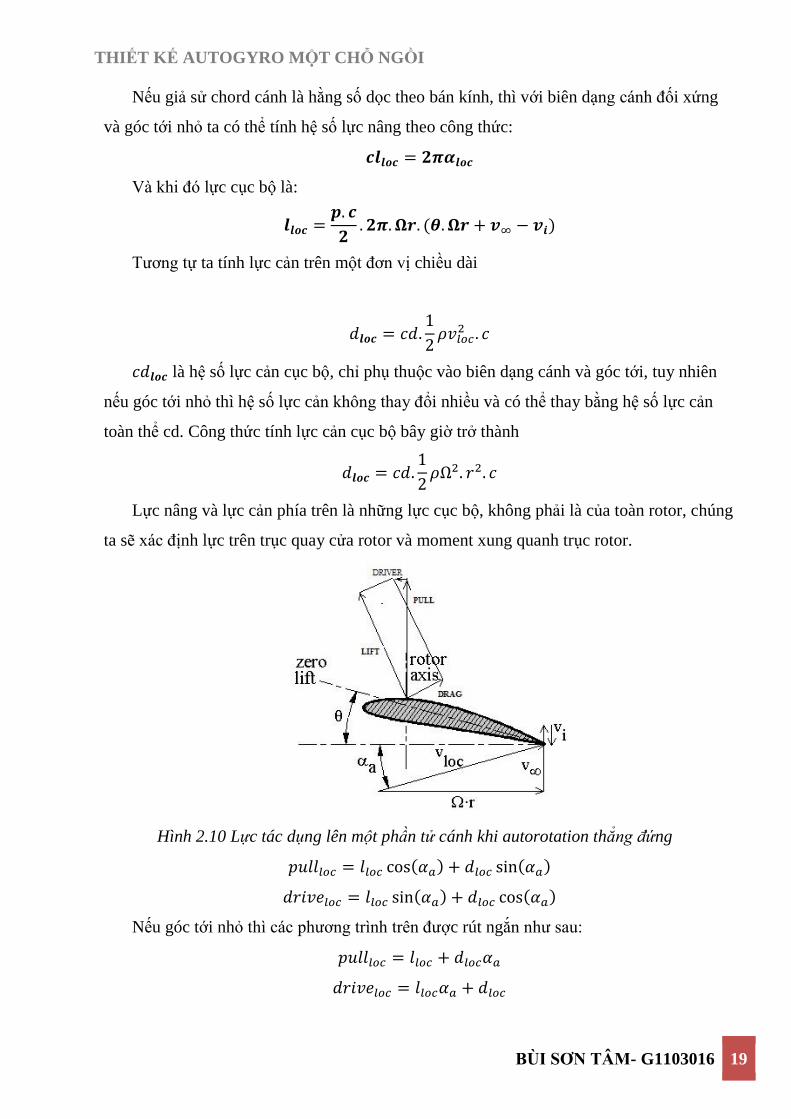
Lực nâng và lực cản phía trên là những lực cục bộ, không phải là của toàn rotor, chúng
ta sẽ xác định lực trên trục quay cửa rotor và moment xung quanh trục rotor.
Hình 2.10 Lực tác dụng lên một phần tử cánh khi autorotation thẳng đứng
𝑝𝑢𝑙𝑙𝑙𝑜𝑐 = 𝑙𝑙𝑜𝑐 cos(𝛼𝑎) + 𝑑𝑙𝑜𝑐 sin(𝛼𝑎)
𝑑𝑟𝑖𝑣𝑒𝑙𝑜𝑐 = 𝑙𝑙𝑜𝑐 sin(𝛼𝑎) + 𝑑𝑙𝑜𝑐 cos(𝛼𝑎)
Nếu góc tới nhỏ thì các phương trình trên được rút ngắn như sau:
𝑝𝑢𝑙𝑙𝑙𝑜𝑐 = 𝑙𝑙𝑜𝑐 + 𝑑𝑙𝑜𝑐𝛼𝑎
𝑑𝑟𝑖𝑣𝑒𝑙𝑜𝑐 = 𝑙𝑙𝑜𝑐𝛼𝑎 + 𝑑𝑙𝑜𝑐

THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 20
Trong phương trình trên ta thấy rằng lực nâng làm quay rotor, còn lực cản làm nó quay
chậm lại. Ở trạng thái bay steady vertical autorotation thì tổng của các lực drive trên một
cánh bằng không. Tổng lực blade drive tìm được bằng cách tích phân từ gốc đến bán kính
hiệu dụng- Re. Bán kinh này thường bằng 97% bán kính thực.
∫ 𝑑𝑟𝑖𝑣𝑒𝑙𝑜𝑐𝑑𝑟 = 0𝑅𝑒
0
Thế biểu thức 𝑑𝑟𝑖𝑣𝑒𝑙𝑜𝑐 vào phương trình
𝑝𝑐
2∫ 𝑟. (
𝒗∞ − 𝒗𝒊Ω𝑟
(2𝜋. Ω. (𝜃. Ω𝑟 + 𝒗∞ − 𝒗𝒊)) − 𝑐𝑑. Ω2𝑟2) 𝑑𝑟 = 0𝑅𝑒
0
Tích phân phương trình trên ta có kết quả
(𝒗∞ − 𝒗𝒊)2.𝑅𝑒2
2+ 𝜃. Ω.
𝑅𝑒3
3(𝒗∞ − 𝒗𝒊) −
𝑐𝑑
2𝜋. Ω2.
𝑅𝑒2
4= 0
Ta tìm được nghiệm
𝒗∞ − 𝒗𝒊 = −1
3𝜃. Ω. 𝑅𝑒 ± √
4
9𝜃2. Ω2. 𝑅𝑒2 +
𝑐𝑑
2𝜋Ω2. 𝑅𝑒2
Kho rotor quay có N số cánh thì tổng lực nâng sẽ là
𝐿𝐼𝐹𝑇 = 𝑁∫ 𝑙𝑜𝑐𝑑𝑟𝑅𝑒
0
𝐿𝐼𝐹𝑇 = 𝜋. 𝑁. 𝜌. 𝑐 ∫ (𝜃. Ω2. 𝑟2 + (𝒗∞ − 𝒗𝒊). Ω𝑟)𝑑𝑟𝑅𝑒
0
𝐿𝐼𝐹𝑇 = 𝜋. 𝑁. 𝜌. 𝑐. Ω2. 𝑅𝑒3 (𝜃
6+
1
2√(
𝜃
3)2
+𝐶𝐷
4𝜋)
Như ta thấy phương trình phụ thuộc vào rất nhiều yếu tố, trong đó vận tốc mũi của
rotor Ω𝑟𝑛 và bán kính rotor R. Nếu ta loại bỏ được hai thành phần phụ thuộc này ra khỏi
công thức trên thì lực nâng sẽ chỉ phụ thuộc vào hình dạng của rotor mà không còn phụ
thuộc tốc độ và kích thước của nó. Khi đó ta có thể làm các mô hình nhỏ để thí nghiệm
trong hầm gió mà sẽ cho kết quả y như trên rotor thực. Hệ số lực đẩy:
𝐶𝑇 =𝐿𝐼𝐹𝑇
12𝜌. Ω2. 𝜋. 𝑅4
Thế phương trình lực nâng vào ta sẽ được:
𝐶𝑇 = 2𝜋.𝑁. 𝑐
𝜋𝑅(𝑅𝑒
𝑅)3
(𝜃
6+1
2√𝜃
3
2
+𝐶𝑑
4𝜋)
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 21
3 NHU CẦU SỬ DỤNG AUTOGYRO TẠI VIỆT NAM
Hiện nay nước ta chưa có 1 chiếc autogyro nào được chế tạo ứng dụng và đưa vào thực
tiễn, vì vậy việc xác định nhu cầu là rất cần thiết
Y tế, tiếp tế lương lực thực phẩm, thuộc men ở những vùng xa xôi trong trường hợp
khẩn cấp, bão lũ
Nông lâm ngư nghiệp, nhu cầu tưới tiêu, phun thuốc trừ sâu trên các cánh đồng, tiết
kiệm nhiên liệu hơn helicopter và linh hoạt hơn cánh bằng
Tìm kiếm cứu nạn, mặc dù tính năng linh hoạt cũng như tải đều kém hơn helicopter
tuy nhiên một phần nào đó có thể chia sẻ công việc để hiệu quả cao nhất, tiết kiệm nhất
Du lịch thể thao, nhu cầu và tiềm năng cao nhất, phục vụ mục đích tham quan từ trên
cao các thung lũng, đảo nổi tiếng, kéo ván lướt…chi phí đầu tư thấp.
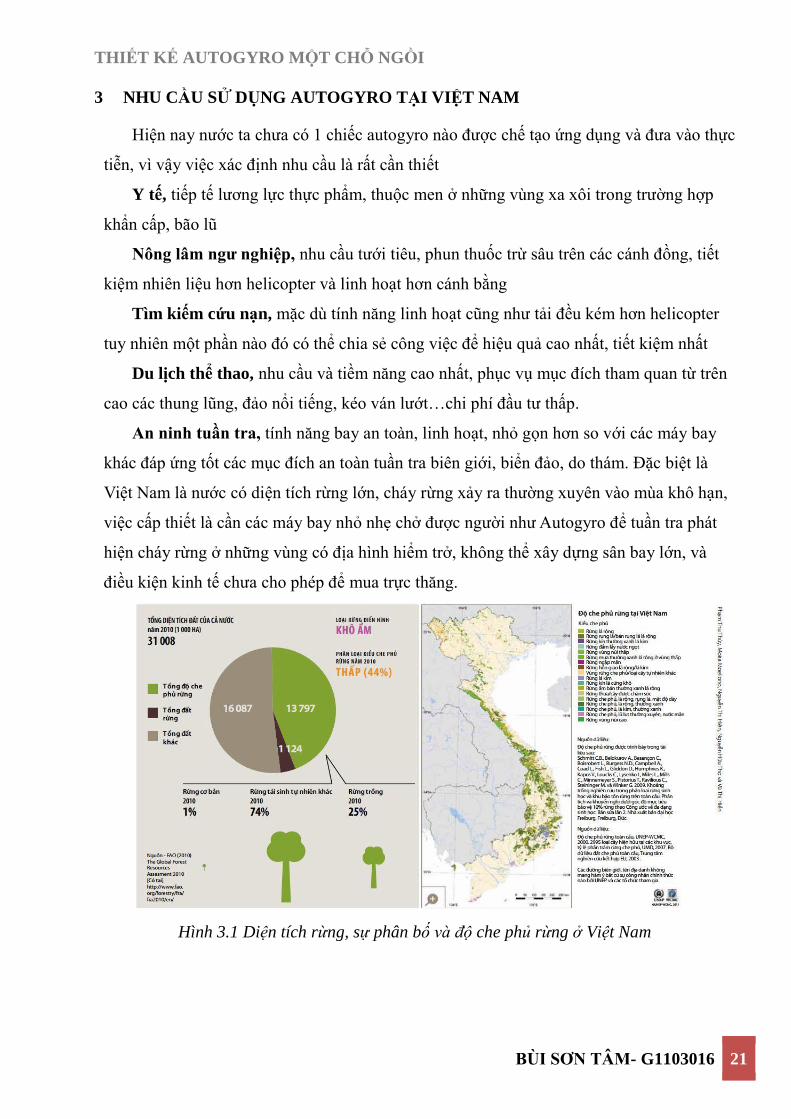
An ninh tuần tra, tính năng bay an toàn, linh hoạt, nhỏ gọn hơn so với các máy bay
khác đáp ứng tốt các mục đích an toàn tuần tra biên giới, biển đảo, do thám. Đặc biệt là
Việt Nam là nước có diện tích rừng lớn, cháy rừng xảy ra thường xuyên vào mùa khô hạn,
việc cấp thiết là cần các máy bay nhỏ nhẹ chở được người như Autogyro để tuần tra phát
hiện cháy rừng ở những vùng có địa hình hiểm trở, không thể xây dựng sân bay lớn, và
điều kiện kinh tế chưa cho phép để mua trực thăng.
Hình 3.1 Diện tích rừng, sự phân bố và độ che phủ rừng ở Việt Nam
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 22
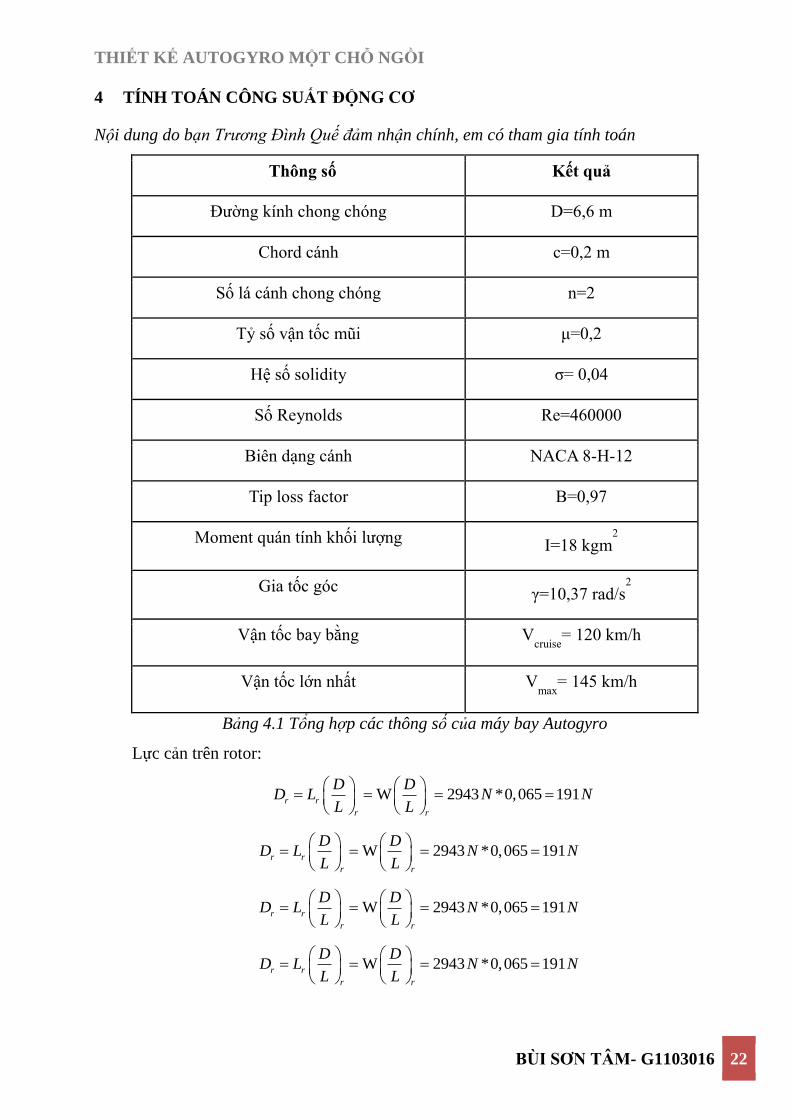
4 TÍNH TOÁN CÔNG SUẤT ĐỘNG CƠ
Nội dung do bạn Trương Đình Quế đảm nhận chính, em có tham gia tính toán
Thông số Kết quả
Đường kính chong chóng D=6,6 m
Chord cánh c=0,2 m
Số lá cánh chong chóng n=2
Tỷ số vận tốc mũi μ=0,2
Hệ số solidity σ= 0,04
Số Reynolds Re=460000
Biên dạng cánh NACA 8-H-12
Tip loss factor B=0,97
Moment quán tính khối lượng I=18 kgm
2
Gia tốc góc γ=10,37 rad/s
2
Vận tốc bay bằng Vcruise
= 120 km/h
Vận tốc lớn nhất Vmax
= 145 km/h
Bảng 4.1 Tổng hợp các thông số của máy bay Autogyro
Lực cản trên rotor:
W 2943 *0,065 191r r
r r
D DD L N N
L L
W 2943 *0,065 191r r
r r
D DD L N N
L L
W 2943 *0,065 191r r
r r
D DD L N N
L L
W 2943 *0,065 191r r
r r
D DD L N N
L L

THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 23
2 2 3 2 2
1910,0057
1 1*1,225 / *(40 / ) * *(3,3 )
2 2
r
rD
D NC
V R kg m m s m
Chọn CDf
= 0,3 và diện tích mặt cắt ngang của thân Sf = 1 m*1,3 m= 1,3 m
2
Hệ số lực cản quy về trên rotor
2 2
2
2 2
1 1
2 2
1,3 *0,30,011
*(3,3m)
f Df r Df rotor
f Df
Df rotor
V S C V S C
S C mC
R
Hệ số lực cản tổng
0,0057 0,011 0,017D Dr Df rotorC C C
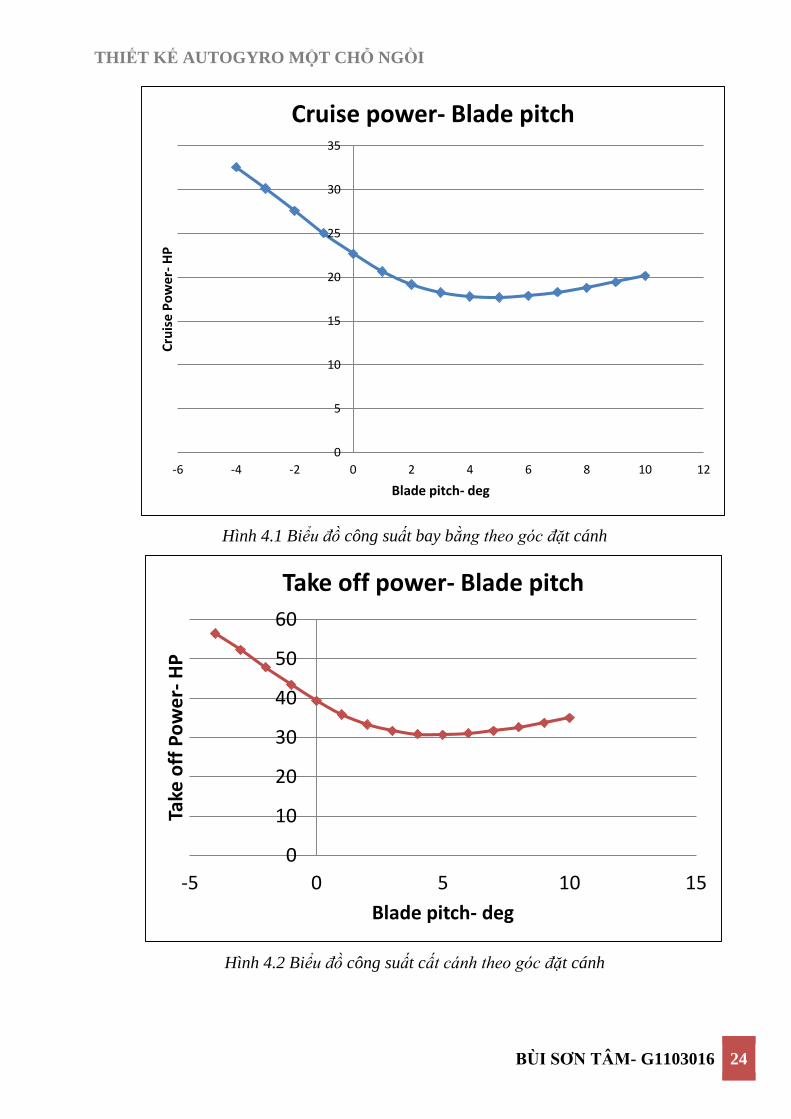
Công suất bay bằng
2 2
3 2 2
1
2
1*1,225 / *(33,3m/ s) * *(3,3 ) *0,017*33,3m/ s
2
13154 17,6
cruise cruise cruise c D cruiseP D V V R C V
kg m m
W hp
Công suất cất cánh
2 2
3 2 2
1
2
1*1,225 / *(40 m/ s) * *(3,3 ) *0,017*40 m/ s
2
22800 30,6
TO TO TO TO D TOP D V V R C V
kg m m
W hp
Công suất động cơ
30,638
0,8
TOengine
engine
P hpP hp
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 24
Hình 4.1 Biểu đồ công suất bay bằng theo góc đặt cánh
Hình 4.2 Biểu đồ công suất cất cánh theo góc đặt cánh
0
5
10
15
20
25
30
35
-6 -4 -2 0 2 4 6 8 10 12
Cru
ise
Po
wer
-H
P
Blade pitch- deg
Cruise power- Blade pitch
0
10
20
30
40
50
60
-5 0 5 10 15
Take
off
Po
we
r-H
P
Blade pitch- deg
Take off power- Blade pitch

THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 25
Hình 4.3 Biểu đồ công suất động cơ theo góc đặt cánh
Hình 4.4 Công suất động cơ theo vận tốc bay tới
0
10
20
30
40
50
60
70
80
-6 -4 -2 0 2 4 6 8 10 12
En
gin
e P
ow
er-
HP
Blade pitch- deg
Engine power- Blade pitch
0
5
10
15
20
25
30
35
40
45
0 5 10 15 20 25 30 35 40 45
En
gin
e p
ow
er-
HP
Flight speed- m/s
Engine power- Flight speed
THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 26
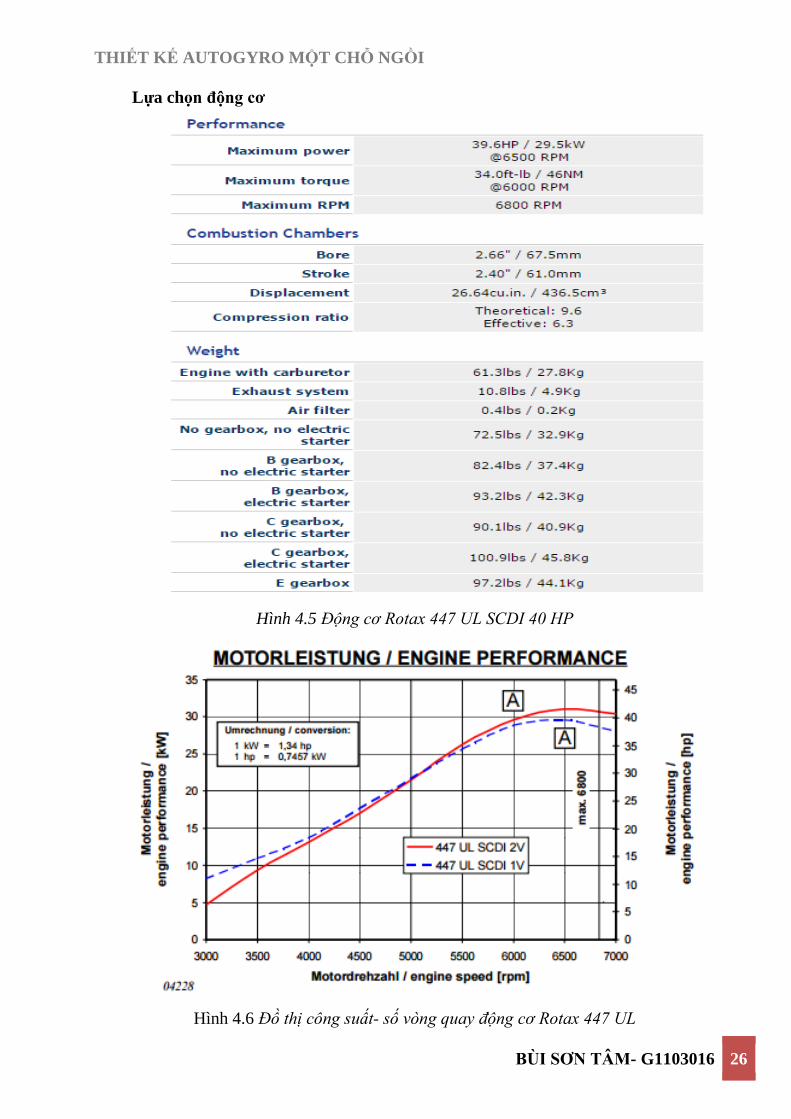
Lựa chọn động cơ
Hình 4.5 Động cơ Rotax 447 UL SCDI 40 HP
Hình 4.6 Đồ thị công suất- số vòng quay động cơ Rotax 447 UL

THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 27
Hình 4.7 Đồ thị moment xoắn- số vòng quay động cơ Rotax 447 UL
Hình 4.8 Đồ thị suất tiêu hao nhiên liệu- số vòng quay động cơ Rotax 447 UL

THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 28
Ta có : max80%* 80%*40 32 24engineP P hp hp kW
Tra đồ thị “Công suất- số vòng quay động cơ Rotax 447 UL” có:
5300engine rpm
Tra đồ thị “Suất tiêu hao nhiên liệu- số vòng quay động cơ Rotax 447 UL” có:
Fuel Consumption =11 lít/giờ
Nhiên liệu dùng cho động cơ là dầu Jet- A1 có ρ= 0,804 kg/l
50
W 620,804 / l
fuel fuel fuel fuel
kgV V l
kg
Thời gian bay cần thiết là 62
5,511 /
fuelV lt h
FC l h
5 TỔNG KẾT VÀ ĐÁNH GIÁ
Bài báo cáo của em bao gồm những nội dung cá nhân đã thực hiện được trong học kỳ
vừa qua, chưa bao gồm những nội dung đầy đủ mà nhóm đã thực hiện. Vì phần báo cáo
thiên về nội dung trình bày, lý thuyết nên chưa có nhiều nội dung khoa học như yêu cầu,
các phần thực hiện còn rời rạc, chưa thống nhất.
Sau một học kỳ học môn Nghiên Cứu & Thuyết Trình, em đã học được nhiều kỹ năng
thuyết trình trước đám đông, mặc dù chưa đạt về phần diễn đạt và trình bày từ đó rút ra
được nhiều kinh nghiệm cho sau này. Ngoài ra, cũng học được nhiều kỹ năng soạn thảo
văn bản, phục vụ cho mục đích luận văn sau này.
Em xin cám ơn Thầy đã luôn theo sát, và giúp đỡ tụi em đến hết học kỳ
Chúc Thầy và gia đình nhiều sức khỏe.

THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI
BÙI SƠN TÂM- G1103016 29
TÀI LIỆU THAM KHẢO
[1] Holger Duda,Insa Pruter, "FLIGHT PERFORMANCE OF LIGHTWEIGHT," Berlin,
2006.
[2] N. P. Quy, "THIẾT KẾ AUTOGYRO MỘT CHỖ NGỒI," HCM, 2013.
[3] R. Engine, "http://www.rotaxservice.com/rotax_engines/rotax_447ULs.htm," [Online].
[4] "http://www.copters.com/aero/planforms.html," [Online].
[5] "http://en.wikipedia.org/wiki/Helicopter_rotor," [Online].
[6] "http://www.autogyro-professional.com," [Online].
[7] Sigitas Rimkus,Tuhin Das, "AN APPLICATION OF THE AUTOGYRO THEORY,"
California, 2013.
[8] M. N. Tiến, "Tính toán ổn định và điều khiển của Gyroplane," HCM, 2010.