An Introduction to Robotics and Embedded System
38
An Introductio n on Robotics & Embedded C Presented By : Peeyush Sahu
-
Upload
dawning-investments-private-limited -
Category
Education
-
view
3.322 -
download
2
description
For more details and Instruments and Kits contact me : [email protected] [email protected]
Transcript of An Introduction to Robotics and Embedded System

An Introduction
on Robotics
&Embedded C
Presented By :Peeyush Sahu

Introduction to Robotics :
Robotics is the study of the design,
construction and use of robots.
These technology represent a
practical application of Physics,
Computer Science, Engineering and
Mathematics .
It provides a variety of Engineering
Concepts.
Every Automated systems can be
stated as a Robot.

History

Why do we need a Robot :
To perform a Job accurately and
efficiently.
To perform a job safely.
To achieve High Throughput (Work done
per Unit time).
To avoid mistakes.
To perform a job continuously without
getting tired.
A robot never says “No, I’ll not do this job
because it is not interesting”.
Actually, there are endless reasons for
using Robots.

What is Robot :
"A reprogrammable, multifunctional
manipulator designed to move material,
parts, tools, or specialized devices
through various programmed motions
for the performance of a variety of
tasks“.
An automatic device that performs
functions normally ascribed to humans
or a machine in the form of a human.

So let’s start doing Robotics by
INVENTING THE TECHNOLOGY WE DES IRE ! ! !

How to Plan a Robot :
It depends upon the requirements.
We have to fix the environment for the
Robot.
For example, if we want a robot who will
make coffee than the materials required
for that are known to Robot. So that the
Robot can take materials from there to
complete the Process. But if we are
unable to do that than we have to develop
a robot, having the capabilities for
identifying the Objects.

How to understand the Logic of Robot :
Let’s take an example of such a robot who
will go to market and buy vegetables. In
this condition , the robot has the
capabilities of identifying the vegetables,
streets, available shortest path from the
source to destination etc.

Types of Robot :
Industrial Robots :
-materials handling
-welding
-inspection
-improving productivity
-Laboratory applications
Mobile Robots :
- Robots that move around on legs, tracks or wheels.
- In 1979 a nuclear accident in the USA caused a leak of
radioactive material. Led to production of special robot
-Teleoperator to handle the radioactive material.
Educational Robots
Domestic Robots

Current Scenario :
A first particular new innovation in robot design is
the open sourcing of robot-projects.
Currently, there are about 1 million industrial
robots toiling around the world, and Japan is the top
country having high density of utilizing robots in its
manufacturing industry
Certification
The Robotics Certification Standards Alliance
(RCSA) is an international robotics certification
authority who confers various industry and
educational related robotics certifications.

Rules of Robotics (Asimov’s law of Robotics) :
A robot may not injure a human being, or,
through inaction, allow a human being to
come to harm
A robot must obey orders given it by
human beings, except where such orders
would conflict with the First Law.
A robot must protect its own existence as
long as such protection does not conflict
with the First or Second Law.
Zeroth Law :
No robot may harm humanity or through
inaction allow humanity to come to harm.

Introduction to Basic Electronic Components Used in Robot ….

The following are the basic electronic components we
have to use in a Robot :
- Resistor
- Capacitor
- Diodes
- Transistors
- Motors
- Power Supply
- Sensors

Resistor :
Resistors are the obstacles in the path of the electrons
flowing in the wire.
We use Resistor because :
Limiting current to another component.
Reducing voltage in some parts of the Circuit.
Controlling the voltage / current flowing into
another component.
Protecting the inputs of sensitive components.

Types of Resistor :
Circuit Symbol
Variable Resistor
Light Dependent Resistor

Capacitor :
Capacitor store electrons by attracting them to
Positive Voltage.
When the voltage is reduced or removed the
electrons move disappear off.
These are used for :
Creating Timers.
Smoothing out voltage.
Blocking DC Current.
Adjust Frequency.

Types of Capacitor :
Electrolytic Capacitor
Ceramic Capacitor

Diodes :Diode is a two terminal electronic component that
conducts electric current in only one direction.Types of Diode :
Anode
Cathode
Silicon P-N Junction Diode :
Light Emitting Diode
Photo Diode

Transistors :Transistors are a kind of Switches. We can control the
switch using voltage on base pin.
The transistors we are using are : P-N-P , N-P-N ,
Phototransistor
+V
InfraredPhoto
Transistor
+Vo
ut
Resistor(~ 10 K)
θ
N-P-N Photo Transistor
Working of 2N2222 (NPN) Transistor IR Sensor circuit by Phototransistor

Motors :Motors are used to provide the motion to machine
directly.
There are four types of Motors :DC Motor DC Geared Motor
Stepper Motor Servo Motor

Power Supply / Source : In Robotics we use 12 V and 1 A power supply
generally but it can vary up to 12 V and 5 A.
It depends upon the Circuit Requirements.
We can use the Voltage Regulator to increase or
decrease the value of Voltage as per the requirement.
7805 Voltage Regulator

Sensors :
Sensors are the devices which are used to sense the
changes that occur in their surroundings.
Types of Sensors :
Sensors
Proximity
Mechanical
Switches
Reflective
Infrared
Visible
Ultrasound
Environmental
Light
Temperature
Humidity
Gas
Pressure

IR Sensor :
There is one emitter and one detector.
Emitter emits IR rays and the detector detects it.
Black LED is an emitter and White LED is the Photo
Diode.
It consists three components : IR LED, Photo Diode,
Op-Amp (LM358 IC).
Op-Amp
(LM358)
Potentiometer
Three Pin Connector
Indicator LED
IR LED
Photo
Diode
IR LEDPhoto Diode

Working of Sensor :
Black LED generating IR
rays and these rays are
reflected by the surface. (If
the surface is black than it
will absorb the Light)
The Photodiode senses the
light and indicator LED shows
the result that whether there
is an object or not.
If indicator LED is on than
the result is +ve and when it is
off then the result is -ve.

HowTo
Builda
LineFollower
RobotLine Follower

What is a Line Follower Robot :
Robot which follows a Line whether it is Curvy or
Straight or Divergence.
We are going to make a machine which will follow a
black line on white background.
If there is any divergence or any cross points in the
path of the machine then it will stop in such case.
These type of case will be solved by the Intelligent
Line Follower.
We are using the AVR ATMega16 Microcontroller to
build this Robot.

Components Required :
1. Development Board – 1 No.
2. Caster Wheel – 2 No.
3. IR Sensor Kit – 2 No.
4. Battery – 6 Volt
5. Wheel Clamps – 2 No.
6. Geared Motors – 2 No.
7. Connecting Chords as required.

Development Board

Right Sensor Left Sensor
Right Wheel Left Wheel
LCD
Connecting Cord

Working of Line Follower
Left Sensor
Right Sensor
Left Sensor
Right Sensor
If left sensor detect the light surface and right sensor detect dark surface then the robot will turn right.
If left sensor detect the dark surface and right sensor detect light surface then the robot will turn left.

Working of Simple Line Follower

How Line Follower Works …

How to Program a Robot …
Required Software :
Operating System : Windows XP, Vista, Windows 7
Tools : AVR Studio. (Current versions has AVR-GCC plug-in to write
code in C)
Compiler : IAR, Image Craft , Code Vision AVR, Win
AVR
Loader : AVR Loader by Robosapiens India
Required Hardware :
USB Programmer
Connecting Cord

Write your program here


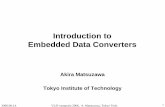
1. Synthetic Aperture Radar (SAR) Antenna
2. Inertial Navigation System/GPS
3. Ku-Band Satellite Communications Antenna
4. Video Cassette Recorder
5. GPS Antennas (Left and Right)
6. APX-100 Identification Friend or Foe Transponder
7. Ku-Band Satellite Communications Sensor Processor
Modem Assembly
8. C-Band Upper Omni directional Antenna Bracket
9. Forward Fuel Cell Assembly
10. Aft Fuel Cell Assembly
11. Accessory Bay
12. Engine Cooling Fan
13. Oil Cooler/Radiator
14. 914F Engine
15. Tail Servo (Left and Right)
16. Battery Assembly #2
17. Power Supply
18. Battery Assembly #1
19. Aft Equipment Bay Tray
20. Secondary Control Module
21. Synthetic Aperture Radar Processor/AGM-114 Electronics
Assembly
22. Primary Control Module
23. Front Bay Avionics Tray
24. ARC-210 Receiver/Transmitter
25. Flight Sensor Unit
26. Video Encoder
27. De-ice Controller
28. Electro-Optical/Infrared Sensor/AN/AAS-52(V)1
Electronics Assembly
29. Front Bay Payload Tray
30. Ice Detector
31. Synthetic Aperture Radar (SAR) Receiver/Transmitter
32. Nose Camera Assembly
AMBRobot an UAV (Robobug)


THANK YOU