การพัฒนาอุปกรณ์...
6
22 TRAINER โดยใช ้ ระบบวิทยุก�าหนดด้วยซอฟต์แวร์ ส�าหรับเครื ่ องรับสัญญาณโลคัลไลเซอร์ (ตอนที ่ 2) ผู้วิจัย : อาจารย์กิตติพล โหราพงศ์ ครูวิชาภาคพื้น กองวิชาอิเล็กทรอนิกส์การบิน สถาบันการบินพลเรือน INSIGHT 1.4.2 ชุดซอฟต์แวร์ GNU RADIO COMPANION (GRC) ส�าหรับส่วนที่สองนั้น ชุดซอฟต์แวร์ GNU Radio Companion (GRC) เป็นซอฟต์แวร์ประเภทโอเพนซอร์ส (Open Source) เพื่อการออกแบบและ พัฒนาระบบการสื่อสารแบบไร้สายในเทคโนโลยีวิทยุก�าหนดด้วยซอฟต์แวร์ (Software Defined Radio or SDR) ด้วยการโปรแกรมแบบวิชวล (Visual Programming) โดยน�าโมดูลการประมวลผลสัญญาณหรือที่เรียกว่า signal processing block ต่างๆ อาทิ ตัวกรองสัญญาณ (Filter) การแปลงฟูริเยร์ แบบรวดเร็ว (Fast Fourier Transform, FFT) วงจรขยายสัญญาณ (Gain control) มาต่อเข้าด้วยกันเป็นล�าดับขั้นตามที่ได้ออกแบบไว้ให้เป็นวงจร การท�างาน (Flow graph) 0 + − (t) Time Trough Crest รูปที่ 4 ค่าขอบ (Envelope) ของสัญญาณเชิงขนาดแอมพลิจูดในโดเมนทางเวลา อย่างไรก็ตาม โมดูลการประมวลผลสัญญาณเฉพาะ ทางซึ่งไม่ได้อยู่ในรายการของชุดซอฟต์แวร์ GRC ที่ได้จัด เตรียมไว้ ผู้พัฒนาระบบสามารถที่จะก�าหนดเพิ่มเติมโดย ใช้การโปรแกรมภาษาซีพลัสพลัส (C++ programming language) ส�าหรับการเขียนขั้นตอนวิธี (Algorithm) เพื่อ จัดการรูปแบบสัญญาณให้ประมวลผลได้ตามที่ต้องการ กอปรกับโปรแกรมภาษาไพธอน (Python) ส�าหรับ การสร้างโมดูลซึ่งเปรียบเสมือนเป็นตัวครอบขั้นตอนวิธี ไว้ให้อยู ่ในรูปแบบวิชวล เพื่อที่จะสามารถให้นักพัฒนาน�าไป ใช้สร้างวงจรการท�างานได้บนหน้าต่างอินเตอร์เฟสผู้ใช้แบบ กราฟฟิกภายในชุดซอฟต์แวร์ GRC การพัฒนาอุปกรณ์ อิเล็กทรอนิกส์การบิน
Transcript of การพัฒนาอุปกรณ์...

2 2 T R A I N E R
โดยใชระบบวทยก�าหนดดวยซอฟตแวรส�าหรบเครองรบสญญาณโลคลไลเซอร (ตอนท 2)
ผวจย : อาจารยกตตพล โหราพงศ ครวชาภาคพน กองวชาอเลกทรอนกสการบน
สถาบนการบนพลเรอน
i n S i g H t
1.4.2 ชดซอฟตแวร GNU RADIO COMPANION (GRC)
ส�าหรบสวนทสองนน ชดซอฟตแวร GNU Radio Companion (GRC) เปนซอฟตแวรประเภทโอเพนซอรส (Open Source) เพอการออกแบบและพฒนาระบบการสอสารแบบไรสายในเทคโนโลยวทยก�าหนดดวยซอฟตแวร (Software Defined Radio or SDR) ดวยการโปรแกรมแบบวชวล (Visual Programming) โดยน�าโมดลการประมวลผลสญญาณหรอทเรยกวา signal processing block ตางๆ อาท ตวกรองสญญาณ (Filter) การแปลงฟรเยรแบบรวดเรว (Fast Fourier Transform, FFT) วงจรขยายสญญาณ (Gain control) มาตอเขาดวยกนเปนล�าดบขนตามทไดออกแบบไวใหเปนวงจร การท�างาน (Flow graph)
𝑉𝑉𝑚𝑚𝑚𝑚𝑚𝑚
𝑉𝑉𝑐𝑐
𝑉𝑉𝑚𝑚
0
𝑉𝑉𝑚𝑚𝑚𝑚𝑚𝑚
𝑉𝑉𝑚𝑚𝑚𝑚𝑚𝑚 + 𝑉𝑉𝑚𝑚𝑚𝑚𝑚𝑚
𝑉𝑉𝑚𝑚𝑚𝑚𝑚𝑚 − 𝑉𝑉𝑚𝑚𝑚𝑚𝑚𝑚
(t) Time
Trough Crest
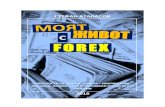
รปท 4 คาขอบ (Envelope) ของสญญาณเชงขนาดแอมพลจดในโดเมนทางเวลา
อยางไรกตาม โมดลการประมวลผลสญญาณเฉพาะทางซงไมไดอยในรายการของชดซอฟตแวร GRC ทไดจดเตรยมไว ผพฒนาระบบสามารถทจะก�าหนดเพมเตมโดยใชการโปรแกรมภาษาซพลสพลส (C++ programming language) ส�าหรบการเขยนขนตอนวธ (Algorithm) เพอจดการรปแบบสญญาณใหประมวลผลไดตามทตองการ กอปรกบโปรแกรมภาษาไพธอน (Python) ส�าหรบการสรางโมดลซงเปรยบเสมอนเปนตวครอบขนตอนวธ ไวใหอยในรปแบบวชวล เพอทจะสามารถใหนกพฒนาน�าไปใชสรางวงจรการท�างานไดบนหนาตางอนเตอรเฟสผใชแบบกราฟฟกภายในชดซอฟตแวร GRC
การพฒนาอปกรณอเลกทรอนกสการบน

2 3 T R A I N E R
i n S i g H t
ในสวนรายละเอยดของการโปรแกรมโมดลการประมวลผลสญญาณเฉพาะทาง สามารถอางองวธการสรางและการใชงานโมดล รวมทงไดแสดงตวอยางเพอใหสามารถศกษาเพมเตมไดจากเวบไซตทเปนทางการของนกพฒนาโอเพนซอรสท http://gnuradio.org/redmine/projects/ gnuradiowiki
1.5 การออกแบบขนตอนวธประมวลผลสญญาณโลคลไลเซอรในระบบวทยก�าหนดดวยซอฟตแวร
การออกแบบระบบเครองรบสญญาณโลคลไลเซอรจะอาศยทฤษฎการดมอด เลตสญญาณเชงขนาด แอมพลจด (AM Demodula-tion) (Haykin S., 2001) ซงคลายกบการท�างานของเครองวทย AM มาประยกตเพอใชวดคาความแตกตางทางความลกของการมอดเลต (DDM) ตามสมการท 1 ส�าหรบบอกต�าแหนงแนวทางวงของอากาศยาน และคาผลรวมทางความลกของการมอดเลต (SDM) ตามสมการท 2 ส�าหรบตรวจสอบความถกตองของการแปลความหมายต�าแหนงของอากาศยาน โดยการออกแบบนจะน�าโมดลการประมวลผลสญญาณ ตางๆ ของเทคโนโลยวทยก�าหนดดวยซอฟตแวรมาตอเขากนเปนวงจรการท�างานเพอใหไดคา DDM และ SDM ส�าหรบน�าไปใชแสดงผลในการทดสอบ
แตเนองจากการค�านวณคาดชนการมอดเลต (Modulation Index) เพอใชในการหาคา DDM และ SDM นน สามารถวเคราะหจากการมอดเลตสญญาณเชงขนาดแอมพลจดไดใน 2 โดเมน (Oppenheim A.V. and Schafer R.W., 1999) ดวยกนคอ การวดคาขนาดแอมพลจดในโดเมนทางเวลาโดยใชคาขอบสญญาณ (Envelope) ตามรปท 4 เพอหาคาดชนการมอดเลตของสญญาณความถ 90 เฮรตซ และสญญาณความถ 150 เฮรตซ
Fourier Transform
𝑓𝑓1 𝑓𝑓2 𝑓𝑓1 𝑓𝑓2 −𝑓𝑓1 −𝑓𝑓2
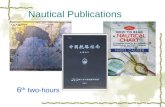
และอกวธหนงคอ การวดคาขนาดแมกนจดทางโดเมนความถโดยใชการแปลงฟรเยรในเวลาชวงสน (Short-Time Fourier Transform, STFT) ตามรปท 5 เพอหาคาสมประสทธความถของสญญาณความถ 90 เฮรตซ และสญญาณความถ 150 เฮรตซ
(ก) การหาคาสมประสทธความถทไดจากการแปลง STFT ในโดเมนทางความถ
(ข) กรองแถบความถทสนใจเพอแยกสญญาณความถ 90 เฮรตซ สญญาณความถ 150 เฮรตซและสญญาณคลนพาห ออกมาจากกน
รปท 5 สเปกตรมความถของการวเคราะหสญญาณเชงขนาดแอมพลจดในโดเมนทางความถ

i n S i g H t
2 4 T R A I N E R
1.10 บรรณานกรมHaykin S., Communication Systems, 4th ed., Wiley, 2001.Oppenheim A.V. and Schafer R.W., Discrete-Time Signal Processing, 2nd ed., Prentice Hall, 1999.International Civil Aviation Organization, International Standards and Recommended Practices, Aeronautical Telecommunications, Annex 10 to the Convention on International Civil Aviation, Volume 1: Radio Navigation Aids, Sixth Edition, July 2006.Kayton M. and Fried W.R., Avionics Navigation Systems, 2nd ed., Wiley, 1996.Mitola J., The software defined radio architecture, IEEE Communications Magazine, Vol.33, pp. 26-38, May 1995.
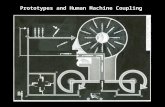
รปท 6 รปแบบการตอเชอมของเครองมอทใชในการทดลอง
ดงนน โครงการวจยนจงไดน�าเสนอวธการออกแบบระบบเครองรบสญญาณโลคลไลเซอรโดยใชระบบวทยก�าหนดดวยซอฟตแวร ดวยขนตอนวธประมวลผลสญญาณโลคลไลเซอรทางเวลา และ ขนตอนวธประมวลผลสญญาณโลคลไลเซอรทางความถ โดยในทายทสดนน จะน�าขนตอนวธทงสองนไปประเมนทดสอบกบเครองก�าเนดสญญาณโลคลไลเซอรจรงเพอเปรยบเทยบประสทธภาพระหวางทงสองวธดงกลาว
1.6 การทดสอบตนแบบเครองรบสญญาณโลคลไลเซอร และผลการทดลอง
1.6.1 ชดเครองมอทใชในการทดลองการทดสอบตนแบบเครองรบสญญาณโลคลไลเซอรในดาน
ความแมนย�าของการอานคาสญญาณโลคลไลเซอรนน จะเชอมตออปกรณตนแบบเขากบเครองก�าเนดสญญาณโลคลไลเซอร (Avionics Signal Generator) เพอน�าสญญาณนนเขามายงเครองรบและอานผลการวดเพอใชในการวดคาความแมนย�า ถกตองตอไป โดยเครองก�าเนดสญญาณโลคลไลเซอรทเลอกใชในงานวจยน จะมดวยกน 2 รนคอ เครองก�าเนดสญญาณโลคลไลเซอรชนดความถคลนพาหเดยว (Single carrier frequency system) รน Rohde & Schwarz CMS57 และเครองก�าเนดสญญาณโลคลไลเซอรชนดความถค (Dual carrier frequency system) รน Wilcox Mark 20A ILS ตามรปท 6 ซงเครองก�าเนดสญญาณรน Wilcox Mark 20A ILS น จะมรปแบบสญญาณเหมอนกบทใชจรงภายใน สนามบนตาง ๆ ของประเทศไทย
ส�าหรบการทดสอบดานประสทธภาพของอปกรณตนแบบทสรางขน จะเทยบเคยงคาทไดจากการวดกบเครองรบสญญาณโลคลไลเซอรรน Rohde & Schwarz EVS300 ตามรปท 6 ซงเปนเครองวดตามมาตรฐานการใชงานจรงและมความผดพลาดจากการวดทต�า
โดยสรป เครองมอทใชในการทดลองของงานวจยนจะถกน�ามาทดสอบครงละ 1 ค โดยน�าเครองรบสญญาณและเครองก�าเนดสญญาณมาตอเขากนเพออานคาทวดไดและจดบนทก เพอการเปรยบเทยบหาคาความผดพลาดทจะแสดงถงประสทธภาพของเครองรบสญญาณโลคลไลเซอรนได ซงรปแบบการตอเชอมของเครองรบสญญาณและเครองก�าเนดสญญาณทใชในการทดลองนน ไดแสดงไวเปนแผนภาพอยในรปท 6

2 5 T R A I N E R
Development of Avionics Instrument
Using SDR for ILS Localizer Receiver (Part Two)
Kittipong HorapongGround Instructor, Avionics DivisionCivil Aviation Training Center
1.4.2 GNU Radio Companion (GRC) Software
The second part of the prototype is the GNU Radio Companion (GRC) software. It is an open-source visual programming software tool used to design and develop SDR wireless communication by combining varieties of signal-processing modules called signal-processing blocks, such as, filter, Fast Fourier Transform (FFT), and gain control in the sequence as designed in the flow graph.
However, programming modules for specific signal-processing block in additional to the GRC provides can
be done using C++ to write the algorithm to manage the signal processes as desired; then, the algorithm will be created as modules embedded within Python as visual interface to allow developers to create circuits with graphical interface in GRC software.
The details in programming the specific signal- processing modules, how to use those modules, and program samples can be found on the official open-source developer website at http://gnuradio.org/redmine/projects/gnuradio/wiki.
i n S i g H t
GNU RADIO COMPANION (GRC)

2 6 T R A I N E R
1.5 Localizer Signal Processing Design for SDR
Designing localizer signal receiver relies on applying the theory of AM demodulation (Haykin S., 2001), which is similar to AM radio receiver to measure the difference between DDM in equation 1 to indicate the position of the runway and SDM in equation 2 to verify the accuracy of aircraft position interpretation. The design will bring all signal-processing modules offered by technology of SDR and connect them as a circuit to derive DDM and SDM values to be used in the test.
In calculating the modulation index in order to find DDM and SDM values, it can be analyzed from amplitude modulation in two domains (Oppenheim A.V. and Schafer R.W., 1999) by measuring the amplitude of discrete-time domain using envelope according to Figure 4 to find the modulation index at 90Hz and 150Hz tone signals.
The other method is measuring the magnitude of
i n S i g H t
discrete-frequency domain using Short-time Fourier Transform (STFT) as shown in Figure 5 to find the coefficient of 90 Hz and 150 Hz tone signals.
A) Deriving the frequency coefficient by transformingSTFT in discrete-frequency domain
B) Filtering the desired 90 Hz, 150 Hz, and the carriersignals by separating them
Figure 5 Frequency spectrum of an AM signal in discrete-frequency domain
As such, this research presents the approach of designing localizer signal receiver utilizing SDR with the localizer signal processing in discrete-time domain and discrete-frequency domain methods. At the final stage, both methods will be evaluated against avionics signal generator to find the efficiency of both methods.

2 7 T R A I N E R
1.6 Testing of localizer signal receiver prototype and its results
1.6.1 Equipment used for the experimentIn testing of the localizer signal receiver prototype as to how accurate
it can read the localizer signal, the prototype has to connect to the avionics signal generator to get the signal in order to read and measure the accuracy to be used later. There are two models of avionics signal generators used in this research: the single carrier frequency system model number CMS57 from Rohde & Schwarz and dual carrier frequency system model number Mark 20A ILS by Wilcox as shown in Figure 6. The Wilcox Mark 20A ILS signal generator gives out actual signal used in various airports in Thailand.
To test the efficiency of the prototype, the measurement received
will be compared to the Rohde & Schwarz EVS300, which is a commercial-grade signal analyzer used in the field with low reading error rate, as shown in Figure 6.
It can be concluded that the equipment used in the experiment in this research will be tested in pair by connecting the signal receivers to the signal generators, reading the values, and recording them in order to compare the absolute error to determine the efficiency of the localizer signal receiver. The connection of the signal receivers and signal generators for the experiment is shown in the chart in Figure 6.
1.10 ReferencesHaykin S., Communication Systems, 4th ed., Wiley, 2001.Oppenheim A.V. and Schafer R.W., Discrete-Time Signal Processing, 2nd ed., Prentice Hall, 1999.International Civil Aviation Organization, International Standards and Recommended Practices, Aeronautical Telecommunications, Annex 10 to the Convention on International Civil Aviation, Volume 1: Radio Navigation Aids, Sixth Edition, July 2006.Kayton M. and Fried W.R., Avionics Navigation Systems, 2nd ed., Wiley, 1996.Mitola J., The software defined radio architecture, IEEE Communications Magazine, Vol.33, pp. 26-38, May 1995.