6. TIJELO U STLAČIVOJ SUBSONIČNOJ STRUJI ZRAKAsilu trenja τ0dP u tangencijalnoj ravnini u pravcu...
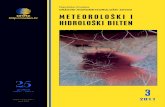
22
6-1 6. TIJELO U STLAČIVOJ SUBSONIČNOJ STRUJI ZRAKA 6.1 Opće jednadžbe za aerodinamičke koeficijente S obzirom da su tijela zrakoplova vrlo često rotacionog oblika promatrat ćemo rotaciono tijela u subsoničnoj struji zraka. Usvajamo cilindrične koordinate. Ishodište se nalazi na vrhu tijela, a x os je os simetrije tijela. Ravan koju čine os tijela x i neporemećena brzina ∞ V nazivamo ravan optjecanja. Za rotaciono tijelo sve ravni kroz os simetrije su iste, ali mi biramo onu koja predstavlja ravan simetrije zrakoplova. Ta ravan je koordinatna ravan xz. Ravan optjecanja čini kut ϑ s tom koordinatnom ravni xz (slika 1) ϑ x r u v w α ∞ V M Slika 6-1 Cjelokupnu vanjsku površinu rotacionog tijela dijelimo na dva dijela: • dio P bočni dio ili omotač na kome imamo granični sloj i • dio b S , nazovimo ga bazni dio (od engleske riječi "base") iza koga se formira trag letjelice. Elisni zrakoplovi obično nemaju bazni dio. Kod mlaznih zrakoplova b S je zbroj svih izlaznih presjeka mlaznih motora. Označimo sa n r ort normale, a sa t r ort tangente u točki M u kojoj promatramo element površine dP.
Transcript of 6. TIJELO U STLAČIVOJ SUBSONIČNOJ STRUJI ZRAKAsilu trenja τ0dP u tangencijalnoj ravnini u pravcu...

6-1
6. TIJELO U STLAČIVOJ SUBSONIČNOJ STRUJI ZRAKA
6.1 Opće jednadžbe za aerodinamičke koeficijente
S obzirom da su tijela zrakoplova vrlo često rotacionog oblika promatrat ćemo rotaciono tijela u
subsoničnoj struji zraka. Usvajamo cilindrične koordinate. Ishodište se nalazi na vrhu tijela, a x os
je os simetrije tijela. Ravan koju čine os tijela x i neporemećena brzina ∞V nazivamo ravan
optjecanja. Za rotaciono tijelo sve ravni kroz os simetrije su iste, ali mi biramo onu koja predstavlja
ravan simetrije zrakoplova. Ta ravan je koordinatna ravan xz. Ravan optjecanja čini kut ϑ s tom
koordinatnom ravni xz (slika 1)
ϑ
x
r
u
v
w
α∞V
M
Slika 6-1
Cjelokupnu vanjsku površinu rotacionog tijela dijelimo na dva dijela:
• dio P bočni dio ili omotač na kome imamo granični sloj i
• dio bS , nazovimo ga bazni dio (od engleske riječi "base") iza koga se formira trag letjelice.
Elisni zrakoplovi obično nemaju bazni dio. Kod mlaznih zrakoplova bS je zbroj svih izlaznih
presjeka mlaznih motora.
Označimo sa nr ort normale, a sa tr
ort tangente u točki M u kojoj promatramo element
površine dP.

6-2
[ ]Tϑεϑεε coscossincossin−=n
[ ]Tϑεϑεε cossinsinsincos=t
x
αsin∞V
αcos∞V
ε
ε
ϑ
rld
tr
nr
ϑdr
y
z
Slika 6-2
Znak - zato što je jedinični vektor normale uvijek orijentiran od površine prema van.
Na taj element površine dP djeluje vanjski tlak p i tangencijalni napon 0τ . Vanjski tlak se
prenosi kroz granični sloj te daje okomitu silu ndPp r⋅− . Tangencijalni napon 0τ daje elementarnu
silu trenja dP0τ u tangencijalnoj ravnini u pravcu lokalne brzine. U općem slučaju ta tangencijalna
sila ima dvije komponente: jednu u presjeku s ravni kroz os x, a drugu u presjeku s ravni okomitoj
na os x . Ukoliko tijelo ne rotira oko svoje osi ovu drugu zanemarujemo. U tom slučaju taj
tangencijalni napon daje silu tdPr
⋅0τ .
To znači da na element bočne površine tijela dP djeluje elementarna sila
dPnpdPt rr−0τ

6-3
Na zadnjem dijelu letjelice gdje započinje trag djeluje tlak bp . Taj tlak stvara silu koja djeluje na
površinu bS ; po pravcu je okomita na površinu dna.
To znači da na cijelu vanjsku površinu rotacionog tijela djeluje sila:
( ) bbbP
nSpdPnptF rrrr−−= ∫ 0τ
Kad rotaciono tijelo miruje u prostoru onda na omotač P i na dno bS djeluje vanjski neporemećeni
tlak ∞p . Ukupna sila jednaka je nuli pa imamo jednadžbu:
bbP
nSpdPnp rr∞∞ −−= ∫0 .
Oduzimanjem ove jednadžbe od sile Fr
koja djeluje na vanjsku površinu rotacionog tijela, daje:
( ) ( ) bbbP
nSppdPnppdPtF rrrr∞∞ −−⋅−−= ∫ ∫0τ .
Cjelokupna aerodinamička sila koja djeluje na rotaciono tijelo Fr
ima tri komponente duž
koordinatnih osi:
aksijalnu: xref
2
CS2V∞∞ρ
bočnu: yref
2
CS2V∞∞ρ
normalnu: zref
2
CS2V∞∞ρ
Projektiranjem vektorske jednadžbe za aerodinamičku silu Fr
na koordinatne osi dobivamo
matričnu jednadžbu:
( ) ( )
−−
−−−
−+
=
∞∞∞∞ ∫∫
001
Sppnnn
dPppdPttt
CCC
S2V
bb
z
y
x
PPz
y
x
0
z
y
x
ref
2
τρ
koja daje tri skalarne jednadžbe:
( ) ( ) bbxPP
x0xref
2
SppdPnppdPtCS2V
∞∞∞∞ −−−−= ∫∫τ
ρ
( ) dPnppdPtCS2V
yPP
y0yref
2
∫∫ ∞∞∞ −−= τρ
( )dPppndPtCS2V
Pz
Pz0zref
2
∫∫ ∞∞∞ −−= τρ

6-4
Dijeljenjem s referentnom silom ref
2
S2V∞∞ρ dobivamo temeljnu jednadžbu za aerodinamičke
koeficijente tijela duž osi koje su vezane za tijelo. Uveli smo bezdimenzionalni tangencijalni napon
2V 20
0∞∞
=ρττ .
Dobivamo opće jednadžbe za aerodinampke koeficijente rotacionog tijela:
ref
b2
b
Pxp
refPx0
refx S
S
2V
ppdPnCS1dPt
S1C
∞∞
∞−−−= ∫∫ ρ
τ
dPnCS1dPt
S1C y
Pp
refPy0
refy ∫∫ −= τ
dPnCS1dPt
S1C z
Pp
refPz0
refz ∫∫ −= τ
U prvoj jednadžbi za aksijalnu silu razlikujemo dva slučaja. Ako nemamo mlazne motore (elisni
pogon zrakoplova ili slučaj topničkih projektila) onda je ∞< ppb pa je
0
2V
ppC 2b
pb <−
=∞∞
∞
ρ
Jednadžba za aksijalni aerodinamički koeficijent ima oblik:
( )4434421444 3444 214434421
bxpxfx C
ref
bbp
C
Pxp
ref
C
Pxo
refx S
SCdPnCS
dPtS
C
−+−+= ∫∫
11 τ .
Ova jednadžba nam pokazuje da postoje tri dijela aksijalnog koeficijenta. xC : fxC otpor trenja,
pxC valni otpor i bxC otpor dna.
U drugom slučaju kad imamo mlazne motore 0ppb >− ∞ pa je to komponenta pogonske
sile
( ) bb Spp ⋅− ∞
Te nju dodajemo aksijalnoj komponenti pogonske sile. Zato prva jednadžba nema treći član tj. za
mlazne zrakoplove
( )44 344 214434421
xp
Pxp
ref
xf
Px0
refx
C
dPnCS1
C
dPtS1C ∫∫ −+= τ
Druge dvije jednadžbe su iste u oba slučaj

6-5
dPnCS1dPt
S1C y
Pp
refPy0
refy ∫∫ −= τ
dPnCS1dPt
S1C z
Pp
refPz0
refz ∫∫ −= τ
Za rotaciono tijelo lddrdP ⋅= ϑ gdje je ld element izvodnice rotacionog tijela, pa je
dxd =εcosl i drd =εsinl . S tim veličinama je
dxdrddrdPtx ⋅=⋅⋅= ϑϑε lcos
drdrddrdPtz ⋅⋅=⋅⋅= ϑϑϑϑε coscossin l
i
drdrddrdPnx ⋅−=⋅⋅−= ϑϑε lsin
dxdrddrdPnz ⋅⋅=⋅⋅= ϑϑϑϑε coscoscos l
Tako je za rotaciono tijelo
∫ ⋅=P
oref
fx dxdrS
C ϑτ1
∫=P
pref
px drdrCS
C ϑ1
Zbog simetrije optjecanja u odnosu na ravan xz ne postoji sila u pravcu y osi pa je 0=yC .
Napomenimo da je ta simetrija narušena ako tijelo rotira oko osi simetrije (kao npr. u slučaju
topničkih projektila), pa tada postoji 0≠yC .
I koeficijent normalne sile ima dva dijela:
∫−=P
pref
zp dxdrCS
C ϑϑcos1
∫ ′=P
oref
zf dxdrrS
C ϑϑτ cos1
Ako je optjecanje rotacionog tijela osno simetrično onda ne postoji ni komponenta zC .
Tangencijalni napon i koeficijent tlaka ne ovise od kuta ϑ pa su jednadžbe za komponente
koeficijenta aksijalne sile:
∫=l
0
2 dxrS
C oref
fx τπ
∫=max
0
2 r
pref
px drrCS
C π

6-6
Isto tako možemo izvesti jednadžbu za moment oko referentne točke na x osi letjelice. Neka
je ta referentna točka V udaljena od ishodišta (vrha letjelice) vx onda je njen vektor položaja
[ ]Tv 00x , a VM je vektor od referentne točke do elementarne sile ( )dPnpt0rr
−τ u točki M .
Ukupni aerodinamički moment za referentnu točku bit će
( )∫ −×=P
0 dPnptVMM rrτ
zato što sila na dnu rotacionog tijela prolazi kroz referentnu točke te nema moment. I ovdje
promatramo moment na rotaciono tijelo kad ono miruje. Taj moment mora biti jednak nuli pa
imamo identitet
( ) 0=−×∫ ∞P
dPnpVM r ,
koji oduzimamo od aerodinamičkog momenta pa dobivamo da je ukupni moment za referentnu
točku V
( )[ ]∫ ∞−−×=P
0 dPnpptVMM rrτ
Poslije dijeljenja s referentnim momentom refrefSVl
2
2∞∞ρ dobivamo
( )∫ −×P
p0refref
dPnCtVMS
1 rr
lτ
Poteg VM ima komponente [ ]Tv zyxx − pa su komponente ovog bezdimenzionalnog momenta:
dPnCtnCtnCt
zyxxiii
S1
Pzpz0ypy0xpx0
v
zyx
refref
⋅−−−
−∫τττ
rrr
l
Zbog simetrije optjecanja taj moment je okomit na ravan optjecanja, što znači da su komponente
duž x osi i z jednake nuli, a njegova bezdimenzionalna komponente duž y osi jest:
( ) ( )( )[ ]∫ ⋅−−−−=P
zpz0vxpx0refref
m dPnCtxxnCtzS
1C ττl
( )[ ] ( )[ ]44444 344444 21
l444444 3444444 21
l
fm
P0zvx
refref
pm
Ppxzv
refrefm
C
dPtxxtzS
1
C
dPCnznxxS
1C ∫∫ ⋅−−+⋅−−= τ
Kako je
ϑcosrz =
dxdrdPtx ⋅= ϑ
drdrdPtz ⋅⋅= ϑϑcos

6-7
drdrdPnx ⋅−= ϑ
dxdrdPnz ⋅⋅= ϑϑcos
bit će koeficijent momenta propinjanja zbroj dva koeficijenta: prvi od normalnog tlaka i drugi od
tangencijalnog napona:
( )[ ] dxdrCxxrrS
CP
pvrefref
mp ϑϑcos1∫ ⋅−+′=
l
( )[ ] dxdrrxxrS
CP
vrefref
mf ϑϑτ cos10∫ ⋅′−−=
l.
Uočimo da je funkcija ϑcospC parna funkcija po ϑ (nerotirajuće tijelo). Zato prvi koeficijent
možemo napisati u obliku
( )[ ]∫ ∫
⋅−−′−=
b
dxrdCxxrrS
C pvrefref
mp
l
l 0 0
cos21 π
ϑϑ
a slično tomu i drugi koeficijent.
U ovom poglavlju razmotrit ćemo samo one dijelove aerodinamičkog koeficijenta koji su
posljedica tlaka na optjecanoj rotacionoj površini. Pri tome zanemarujemo postojanje graničnog
sloja. U slijedećem poglavlju razmotrit ćemo granični sloj i odredit ćemo dijelove aerodinamičkog
koeficijenta koji su posljedica tangencijalnog napona u graničnom sloju.
6.2 Parcijalna diferencijalna jednadžba u cilindričnim koordinatama
Na raspolaganju su nam jednadžba kontinuiteta, Eulerova jednadžba (tj. jednadžba količine gibanja)
te energetska jednadžba (u ovom slučaju za idealni plin i adiabatsko strujanje)
( )
constp
pdtVd
V
=
−=
=
−γρ
ρ
ρ
grad
0divr
r
Iz ovih jednadžba kao i u slučaju pravokutnih koordinata dobivamo parcijalnu diferencijalnu
jednadžbu potencijala poremećene brzine.
Iz druge jednadžbe projektiranjem na koordinatne osi i razvijanjem u cilindričnim
koordinatama:
wr1v
ru
xdtd
ϑ∂∂
+∂∂
+∂∂
=
ϑ∂∂
+∂∂
+∂∂
=r1
rxdiv

6-8
dobivamo:
xa
xddp
xpwu
rv
ruu
xu
∂∂
−=∂∂
−=∂∂
−=
∂∂
+∂∂
+∂∂ ρρ
ρϑρ 21
ra
rddp
rpwv
rv
rvu
xv
∂∂
−=∂∂
−=∂∂
−=
∂∂
+∂∂
+∂∂ ρρ
ρϑρ 21
ϑρ
ϑρ
ρϑϑρ
∂∂
−=∂∂
−=∂∂
−=
∂∂
+∂∂
+∂∂
ra
rddpp
rww
rv
rwu
xw 1111 2
zato što je prema trećoj jednadžbi ( )ρp . Iz ovih jednadžba dobivamo
∂∂
+∂∂
+∂∂
⋅−=∂∂ wu
rv
ruu
xu
ax ϑρρ 1
2
∂∂
+∂∂
+∂∂
−=∂∂ wv
rv
rvu
xv
ar ϑρρ 1
2
∂∂
+∂∂
+∂∂
−=∂∂ ww
rv
rwu
xw
ar ϑρ
ϑρ 11
2
Iz prve jednadžbe je
( ) ( ) ( ) 01=+
∂∂
+∂
∂+
∂∂
rvw
rrv
xu ρ
ϑρρρ
011=
+
∂∂
+∂∂
+∂∂
+∂∂
+∂∂
+∂∂
rvw
rrv
xuw
rv
ru
x ϑρ
ϑρρρ
Zamjenom u ovu jednadžbu parcijalnih derivacija dobivenih iz druge jednadžbe
011
1
1
2
2
2
=
+
∂∂
+∂∂
+∂∂
+⋅
∂∂
+∂∂
+∂∂
−
+⋅
∂∂
+∂∂
+∂∂
−
+⋅
∂∂
+∂∂
+∂∂
−
rvw
rrv
xuwww
rv
rwu
xw
a
vwvr
vrvu
xv
a
uwur
vruu
xu
a
ϑρ
ϑρ
ϑρ
ϑρ
Gustoća se skraćuje te poslije sređivanja dobivamo jednadžbu
0xwu
r1
awu
rwv
r1
avw
xv
ru
auv
rvw
r1
aw1
rv
av1
xu
au1
222
2
2
2
2
2
2
=
∂∂
+∂∂
−
∂∂
+∂∂
−
∂∂
+∂∂
−
−+∂∂
⋅
−+
∂∂⋅
−+
∂∂⋅
−
ϑϑ
ϑ
ili
( ) ( ) ( )
0xwu
r1wu
rwv
r1vw
xv
ruuv
rvaw
r1wa
rvva
xuua 2222222
=
∂∂
+∂∂
−
∂∂
+∂∂
−
∂∂
+∂∂
−
−+∂∂
⋅−+∂∂⋅−+
∂∂⋅−
ϑϑ
ϑ

6-9
Kvadrat brzine zvuka može se eliminirati pomoću Bernulieve jednadžbe
1a
2V
1a
2V 2222
−+=
−+ ∞∞
γγ
( )222222 wvuV2
1aa −−−−
+= ∞∞γ
6.2.1 Linearizacija jednadžbe potencijala poremećaja
Uvedimo poremećaje brzina
uuu ˆ+= ∞ vvv ˆ+= ∞ www ˆ+= ∞ aaa ˆ+= ∞
i definiramo potencijal poremećaja brzina
xxu φφ ˆˆˆ =
∂∂
= rrv φφ ˆˆˆ =
∂∂
= rr
w ϑφϑφ ˆˆ1ˆ =∂∂
=
u
v
wx
y
z
αsin∞V αα sinsin∞∞ −= Vw
ϑα cossin∞∞ =Vv
ϑ
r
αcos∞∞ =Vu
Slika 6-3
Razložimo neporemećenu brzinu ∞V na uzdužnu ∞u , radijalnu ∞v i cirkularnu ∞w komponentu.
Kao što se sa slike 6-3 vidi komponenta ∞w je negativna:
ϑαϑα
α
sinsincossin
cos
⋅−=⋅=
=
∞∞
∞∞
∞∞
VwVvVu

6-10
Poslije unošenja tijela u struju zraka (poremećeno strujanje)
xVuuu φα ˆcosˆ +=+= ∞∞
rVvvv φϑα ˆcossinˆ +=+= ∞∞
rVwww ϑφϑα
ˆsinsinˆ +−=+= ∞∞
Iz ovih jednadžba, s obzirom da su ∞V i α konstante, derivacijom dobivamo:
xxxu φ̂=∂∂ xrr
u φ̂=∂∂ x
uϑφϑˆ=
∂∂
xrxv φ̂=∂∂ rrr
v φ̂=∂∂ ϑϑ φφϑα
ϑ rr wVv ˆˆsinsin +=+−=∂∂
∞∞
rxw xϑφ̂=∂∂
rw
rrrrw rr ˆˆˆˆ
2 −=−=∂∂ ϑϑϑ φφφ
rv
rVw ϑϑϑϑ φφϑα
ϑ
ˆˆcossin +−=+−=
∂∂
∞∞
Smjenom ovih vrijednosti u p. d. jednadžbu
( ) ( ) ( )
011
1 2222222
=
∂∂
+∂∂
−
∂∂
+∂∂
−
∂∂
+∂∂
−
++∂∂
⋅−+∂∂⋅−+
∂∂⋅−
xwu
rwu
rwv
rvw
xv
ruuv
rvaw
rwa
rvva
xuua
ϑϑ
ϑ
i u jednadžbu
( )222222 wvuV2
1aa −−−−
+= ∞∞γ
te ako pretpostavimo da su poremećaji brzina u odnosu na neporemećenu brzinu
∞∞∞ Vw
Vv
Vu ˆ
,ˆ
,ˆ
mali brojevi, a to je slučaj ako Ma nije u transonici:
• kad je dxdr mali broj,
• kad je mali napadni kut α ,
Poslije zanemarivanja malih veličina drugog reda i eliminacije 2a , dobivamo
( ) 0ˆˆˆˆ1 2
2 =+++−rr
Ma rrrxx
φφφφ ϑϑ .
To je linearna parcijalna jednadžba potencijal poremećaja.

6-11
6.2.2 Princip rješavanja
Rješenje ove parcijalne diferencijalne jednadžbe tražimo u obliku zbroja
( ) ( )ϑφφφ ,,,ˆ10 rxrx +=
s tim da prvi član ( )rx,0φ predstavlja potencijal poremećaja osno simetričnog optjecanja. On mora
zadovoljiti p.d. jednadžbu potencijala poremećaja koja za osno simetrično optjecanje ima oblik:
( ) 0ˆ1ˆˆ
1 020
2
20
22 =
∂∂
+∂∂
+∂∂
−rrrx
Maφφφ
zato što za osno simetrično optjecanje potencijal nije ovisan od kuta ϑ pa je 0ˆ =ϑϑφ . Tražimo p.d.
jednadžbu koju treba zadovoljiti dopunski potencijal poremećaja brzina ( )ϑφ ,,1 rx . U opću p.d.
jednadžbu koja mora biti zadovoljena pri optjecanju pod napadnim kutom
( ) 0ˆˆˆˆ1 2
2 =+++−rr
Ma rrrxx
φφφφ ϑϑ
zamijenimo potencijal pomoću zbroja 10 φφφ += .
( ){
0ˆˆ1ˆ
0
ˆ1ˆˆˆˆ1 10
21
2
20
2
221
2
20
2
21
2
20
22 =
∂∂
+∂∂
+
∂∂
+∂∂
+∂∂
+∂∂
+
∂∂
+∂∂
−rrrrrrxx
Ma φφϑφ
ϑφφφφφ
( ) ( ) 0ˆ1ˆ1ˆˆ
1
0
ˆ1ˆˆ1 1
21
2
221
2
21
220
20
2
20
22 =
∂∂
+∂∂
+∂∂
+∂∂
−+∂∂
+∂∂
+∂∂
−rrrrx
Marrrx
Ma φϑφφφφφφ
44444 344444 21
Dopunska funkcija mora zadovoljivi p. d. jednadžbu
( ) 0ˆ1ˆ1ˆˆ
1 121
2
221
2
21
22 =
∂∂
+∂∂
+∂∂
+∂∂
−rrrrx
Ma φϑφφφ
S obzirom na specifičan oblik ove p. d. jednadžbe potencijala, njeno je rješenje:
( ) ϑφϑφ cosˆ
,,ˆ 01 r
rx∂∂
−= .
Da bi dokazali ovu tvrdnju odredimo derivacije funkcije ( )ϑφ ,,1 rx vodeći računa da 0φ nije
funkcija kuta ϑ :
ϑφ
φ cosˆ
ˆ 01 r
xxxx ∂
∂−=
ϑφ
φ cosˆ
ˆ 01 r
rr ∂
∂−=

6-12
ϑφ
φ cosˆ
ˆ 01 r
rrrr ∂
∂−=
ϑφφ ϑϑ cosˆˆ 0
1 r∂∂
=
Te derivacije moraju zadovoljiti parcijalnu diferencijalnu jednadžbu dopunskog potencijala
( ) 0111 121
2
221
2
21
22 =
∂∂
+∂∂
+∂∂
+∂∂
−rrrrx
Ma φϑφφφ
Zamjenom ovih vrijednosti u p. d. jednadžbu dobivamo
( ) =
∂
∂−+
∂
∂+
∂
∂−
∂
∂−− ∞ ϑ
φϑ
φϑ
φϑ
φcos
ˆ1cosˆ1cos
ˆcos
ˆ1 00
2002
rrrrrrMa rrrxx
( )
∂
∂+
∂
∂−
∂
∂+
∂
∂−⋅−= ∞ rrrrrr
Ma rrrxx 002
002ˆ1ˆ1ˆˆ
1cosφφφφ
ϑ
( )
∂∂
+∂
∂+
∂
∂−⋅−= ∞ rrrr
Ma rrrxx 0002ˆˆˆ
1cosφφφ
ϑ
( )
++−∂∂
⋅−= ∞4444 34444 21
0
ˆ~ˆ1cos 000
2
rMa
rr
rrxx
φφφϑ
6.2.3 Rubni uvjeti za potencijal poremećaja
Rubni uvjeti su na tijelu
εtan⋅= uv
( ) εtanˆˆ uuvv +=+ ∞∞
gdje je
dxdr
=εtan
ili pomoću potencijala poremećaja brzina
εφφ tanˆˆ⋅
∂∂
+=∂∂
+ ∞∞ xu
rv
εφαφϑα tanˆ
cosˆ
cossin ⋅
∂∂
+=∂∂
+ ∞∞ xV
rV

6-13
6.3 Numeričko rješenje potencijala poremećaja
6.3.1 Osno simetričkog optjecanje
Da bi se riješila p. d. jednadžba vrše se razne pretpostavke. Već pri izvođenju pretpostavljeno je da
je tijelo vitko tj. da je radijus poprečnog presjeka mali u odnosu na duljinu tijela. Nove dopunske
pretpostavke da bi riješili p. d. jednadžbu daju pristupačne jednadžbe, ali za praksu neprihvatljive
točnosti. Zato se za rješenje ove p. d. jednadžbe koriste numeričke metode
Rješenje p. d. jednadžbe ima oblik
( )( ) ( ) 2220
1,ˆ
rMax
Grx∞−+−
=ξ
φ
r
u
v
x ϑ ∞V
r
ξξ−x
x
()
2
2
r
x+
− ξ
Slika 6-4
U to se možemo lako uvjeriti. Ta funkcija predstavlja potencijal izvora na osi x u točki ξ (na toj
udaljenosti od vrha tijela jer je ishodište u vrhu), intenziteta G. Ovaj potencijal ne može zadovoljiti
rubne uvjete u bilo kojoj točki na površini tijela, jer ima samo jednu proizvoljno konstantu G (ako
fiksiramo položaj izvora ξ ) s kojom može zadovoljiti jedan uvjet. S njim možemo ispuniti rubni

6-14
uvjet samo u jednoj točki, a zbog simetrije bit će ispunjen u svim točkama poprečnog presjeka
tijela. Međutim, kako je p. d. jednadžba linearna i homogena, zbir više rješenja je isto rješenje. Zato
ćemo uzeti onoliko izvora koliko želimo ispuniti rubnih uvjeta npr. n. Te izvore rasporedit ćemo
duž osi x po nekom izabranom rasporedu, a to znači da će potencijal u točki (x, r) biti
( )( ) ( )∑
=∞−+−
=n
i i
i
rMax
Grx
1 22201
,ˆξ
φ
što znači da na osi u točki iς imamo izvor intenziteta iG . Konstante nGGG ,,, 21 K odredit ćemo
tako da u n točaka nCCC K,, 21 budu zadovoljeni rubni uvjeti na površini tijela koji u slučaju osno
simetrično optjecanja imaju oblik:
( ) kkk uVv εtanˆˆ += ∞ .
U točki kC komponente poremećaja brzine određene su derivacijama potencijala
( ) ( )[ ]∑=
∞−+−
−−=
∂∂
=n
i kik
ikik
rMax
xG
xu
123222
0
1
ˆˆ
ξ
ξφ
( )( ) ( )[ ]∑
=∞
∞
−+−
−−=
∂∂
=n
i kik
kik
rMax
MarG
rv
123222
20
1
1ˆˆ
ξ
φ
Zamjenom ovih vrijednosti za poremećaje brzina u jednadžbu za rubni uvjet dobivamo jednu
linearnu jednadžbu
( )( ) ( )[ ]
( )( ) ( )[ ]∑∑
= ∞
∞= ∞
∞
−+−
⋅−−=
−+−
−−
n
1i232
k22
ik
kikik
n
1i232
k22
ik
2k
irMa1x
xGVrMa1x
Ma1rGξ
εξεξ
tantan
Kad taj uvjet napišemo za n točaka nCCC K,, 21 dobivamo n linearnih jednadžba sa n
nepoznanica nGGG ,,, 21 K
( ) ( )( ) ( )[ ] ki
n
i kik
kkik VGrMax
Marxε
ξ
εξtan
1
1tan1
23222
2
∞=
∞
∞ =−+−
−−⋅−∑
Te jednadžbe su oblika
EGA =⋅ .
gdje su matrice
( ) ( )( ) ( )[ ]
======
−+−
−−⋅−
============
=
∞
∞
nkninkinki
rMaxMarx
knikikiknikiki
kik
kkik
::2;1
11tan
2;2:22;11;1;21;1
23222
2
LLL
LLLLLL
LLLLL
LLLLLL
LL
LLL
ξ
εξA

6-15
=
n
i
G
G
GG
L
L2
1
G
⋅= ∞
n
i
V
ε
ε
εε
tan
tan
tantan
2
1
L
LE
6.3.2 Optjecanje s napadnim kutom
r
u
v
w
x
ϑ
αsin∞V
αcos∞V
r
ξξ−x
x
ρϑ
Slika 6-5
Vidjeli smo da je u ovom slučaju potencijal poremećaja zbroj potencijal osno simetričnog
optjecanja i dopunskog na temelju osno simetričnog potencijala
ϑφφφ cosˆˆˆ 0
0 r∂∂
−=
Oblik funkcije potencijala poremećaja nam je poznat pa će oblik potencijala poremećaja pri
nesimetričnom optjecanju biti zbroj potencijal izvora i potencijala dipola:
( )( ) ( )[ ] ( ) ( )[ ] 2322221222 1
cos
1,,ˆ
rMax
rH
rMax
Grx∞∞ −+−
+−+−
=ξ
ϑ
ξϑφ

6-16
gdje je H intenzitet dipola trenutno jedna nova proizvoljna konstanta. I ovog puta da bi zadovoljili
rubne uvjete u više točaka, uzet ćemo zbroj potencijala izvora i dipola, raspoređenih po osi x u
točkama ni ξξξξ ,,,,, 21 KK , a intenziteta ni GGGG KK21 za izvore i
ni HHHH KK21 za dipole. Tako će potencijal poremećaja brzina u točki ϑ,, rx biti
( )( ) ( )[ ] ( ) ( )[ ]∑
= ∞∞
−+−+
−+−=
n
i i
i
i
i
rMax
rH
rMax
Grx1
2322221222 1
cos
1,,ˆ
ξ
ϑ
ξϑφ
Radi lakšeg pisanja uvedimo varijablu
( ) ( ) 222 1 rMax ∞−+−= ξρ
pa je potencijal poremećaja s tom varijablom:
( ) ∑=
+=n
i
ii rHGrx1
3
cos,,ˆρ
ϑρ
ϑφ .
a poremećaji komponenta u točki ϑ,, rx
( )∑=
−−
−−=
∂∂
=n
ii
ii
i
i HrxGxx
u1
53
cos3ˆˆ
ρϑξ
ρξφ
( ) ( )∑=
∞∞
⋅
−−+
−−=
∂∂
=n
ii
iii
i
HrMaGrMar
v1
5
22
33
2 cos13cos1ˆˆ
ρϑ
ρϑ
ρφ
∑=
−=∂∂
=n
i
iHr
w1
3
sinˆ1ˆρ
ϑϑφ
Na površini tijela mora biti zadovoljen rubni uvjet koji u slučaju nesimetričnog optjecanja ima oblik
( ) εαϑα tanˆcosˆcossin ⋅+=+ ∞∞ uVvV
Taj rubni uvjet ispisat ćemo za n2 kontrolnih točaka. Uzet ćemo n točaka s gornje strane tijela i n
točaka s donje strane tijela. Pri tome gornja strana tijela su točke u kojima je 0=ϑ , a donja strana
tijela su točke u kojima je πϑ = . Te točke leže u ravni optjecanja (to je ravan koju čine brzina iz
beskonačnosti i os tijela). Primijenimo, prvo, taj rubni uvjet na n točaka kk rx , s gornje strane 0=ϑ
u kojima su poremećaji brzina:
( )∑=
−−
−−=
n
ii
ik
kiki
ik
ikk HrxGxu
153
3ˆρξ
ρξ
( ) ( )∑=
∞∞
⋅
−−+
−−=
n
ii
ik
k
iki
ik
kk HrMaGrMav
15
22
33
2 1311ˆρρρ
Zamjenom u rubni uvjet
( ) εαα tanˆcosˆsin ⋅+=+ ∞∞ kk uVvV ,

6-17
dobivamo:
( ) ( )
( )k
n
ii
ik
ki
ik
ik
n
ii
ik
k
iki
ik
k
HrxGxV
HrMaGrMaV
ερξ
ρξα
ρρρα
tan3cos
1311sin
153
15
22
33
2
⋅
−−
−−+=
=
⋅
−−+
−−+
∑
∑
=∞
=
∞∞∞
ili
( ) ( ) ( ) ( )
k
n
ii
ik
kkk
iki
ik
kkik
VV
HrMarxGrMax
εαα
ρεξ
ρρεξ
tancossin
13tan311tan1
5
22
33
2
⋅+−=
=
⋅
−−−++⋅
−−−
∞∞
=
∞∞∑
Zatim primijenimo rubni uvjet na n točaka kk rx , s donje strane gdje je πϑ = . U tim točkama
poremećaji brzina jesu:
( )∑=
−+
−−=
n
ii
iki
ik
ikk HrxGxu
153
3ˆρξ
ρξ
( ) ( )∑=
∞∞
⋅
−+−+
−−=
n
ii
iii
ik
kk HrMaGrMav
15
22
33
2 1311ˆρρρ
Zamjeno u jednadžbu za rubni uvjet kad je πϑ =
( ) kkk uVvV εαα tanˆcosˆsin ⋅+=+− ∞∞
Dobit ćemo još n jednadžba tipa
( ) ( )
( )k
n
ii
ik
ki
ik
ik
n
ii
ik
k
iki
ik
k
HrxGxV
HrMaGrMaV
ερξ
ρξα
ρρρα
tan3cos
1311sin
153
15
22
33
2
⋅
−+
−−+=
=
⋅
−+−+
−−+−
∑
∑
=∞
=
∞∞∞
ili
( ) ( ) ( ) ( )
k
n
ii
ik
kkk
iki
ik
kkik
VV
HrMarxGrMax
εαα
ρεξ
ρρεξ
tancossin
13tan311tan1
5
22
33
2
⋅+=
=
⋅
−−−+−⋅
−−−
∞∞
=
∞∞∑
Usporedimo ovu jednadžbu za kontrolne točke kad je πϑ = , s jednadžbom za uvjete u kontrolnim
točkama s gornje strane kad je 0=ϑ

6-18
( ) ( ) ( ) ( )
k
n
ii
ik
kkkik
iki
ik
kkik
VV
HrMarxGrMax
εαα
ρεξ
ρρεξ
tancossin
13tan311tan1
5
22
33
2
⋅+−=
=
⋅
−−−++⋅
−−−
∞∞
=
∞∞∑
Kao što vidimo lijeve strane tih jednadžba su iste, samo se mijenja znak ispred intenziteta dipola.
Tako konačno dobivamo linearni sustav od 2n jednadžba sa 2n nepoznatih
down
up
FBHAGFBHAG
=−
=+
u kojem matrica A ima oblik:
( ) ( )
======
−−−
============
= ∞
nkninkinki
rMax
knikikikniki;ki
ik
kkik
;;2;1
1tan
2;2;22;11;1;211
3
2
LLL
LLLLLL
LLLLL
LLLLLL
LLL
LLL
ρεξA
Uočimo da je to ona ista matrica koju smo imali za slučaj osno simetričnog optjecanja. Matrica B
ima oblik:
( ) ( )
======
−−−+
============
= ∞
nkninkinki
rMarx
knikikikniki;ki
ik
kkkik
ik
;;2;1
13tan31
2;2;22;11;1;211
5
22
3
LLL
LLLLLL
LLLLL
LLLLLL
LLL
LLL
ρεξ
ρB
Podsjetimo se da je
( ) ( ) 222 1 kikik rMax ∞−+−= ξρ
=
−⋅
==
=∞∞
nk
VV
kk
kup
L
L
αεα sintancos
21
F
=
+⋅
==
=∞∞
nk
VV
kk
kdown
L
L
αεα sintancos
21
F
Već smo rekli da je matrica A ista za osno simetrično i za optjecanje pod napadnim kutom. Ako
zbrojimo jednadžbe

6-19
down
up
FBHAGFBHAG
=−
=+
dobivamo
downup2 FFAG +=
S obzirom na strukturu vektora downup FF i bit će
=
==
⋅=+ ∞
nk
2k1k
V2k
up
L
L
εα
tancosdownFF
pa je intenzitet vrtloga
⋅⋅= −∞
n
k
2
2
1V
ε
ε
εε
α
tan
tan
tantan
cos
L
LAG
To znači da uzdužna komponenta neporemećene brzina stvara izvore raspoređene po osi rotacionog
tijela.
Isto tako ako oduzmemo drugu jednadžbu od prve dobivamo
downup2 FFBH −=
te s obzirom opet na strukturu vektora downup FF i bit će
JFF down αsin∞−=− V2up
gdje je J jedinični vektro (sve komponente su jednake jedinici). Tako dobivamo
JBH ⋅= −∞
1V αsin
što znači da druga komponenta (poprečna komponenta) brzine stvara dipole.
6.4 Koeficijent tlaka
Koeficijent tlaka određujemo iz jednadžbe:
−=
−=
−=
∞∞∞∞∞
∞
∞∞
∞ 1212
2
222 pp
Mapp
Vp
VppC p γρρ

6-20
To znači da za određivanje koeficijenta tlaka trebamo odnos tlaka u točki prema tlaku u
beskonačnosti. Taj odnos određujemo iz Saint Venanove jednadžbe:
∞
∞∞ −+=
−+
ργγ
ργγ pVpV
12
12 22
eliminacijom gustoće pomoću adiabatske jednadžbe
γρρ
1
=
∞∞ p
p
dobivamo:
∞
∞∞
−
∞∞ −+=
−
+ργ
γργ
γ γ pVpppV
12
12 2
1
2
( )
−−
−=
∞
∞
∞∞
∞
−
∞∞
22
1
2
11 VVpp
ppp
ργ
γρρ
γ
( )
−
−−=
∞
∞
−
∞
222
11
211 VV
app γγ
1
2
222
211
−
∞
∞∞
∞
−⋅
−−=
γγ
γV
VVMapp
Kvadrat poremećene brzina je:
( ) ( ) ( )2222 ˆˆˆ wwvvuuV +++++= ∞∞∞ ,
gdje su komponente neporemećene brzine:
ϑαϑα
α
sinsincossin
cos
⋅−=⋅=
=
∞∞
∞∞
∞∞
VwVvVu
a poremećaji komponenata su dani jednadžbama:
( )∑=
−−
−−=
n
ii
ii
i
i HrxGxu1
53
cos3ˆρ
ϑξρξ
( ) ( )∑=
∞∞
⋅
−−+
−−=
n
ii
iii
i
HrMaGrMav1
5
22
33
2 cos13cos1ˆρ
ϑρϑ
ρ
∑=
−=n
i
iHw1
3
sinˆρ
ϑ
U ovim jednadžbama je ( ) ( ) 222 1 rMax ii ∞−+−= ξρ , a ( )xr je funkcija površine rotacionog tijela.

6-21
6.5 Numerički proračun aerodinamički koeficijenata zbog tlaka
Vidjeli smo da su aerodinamički koeficijenti rotacionog tijela dani jednadžbama
∫ ′=P
pref
px dxdrrCS
C ϑ1
∫−=P
pref
z dxdrCS
C ϑϑcos1
( )[ ]∫ ∫
⋅−+′=
b
dxdCxxrrrS
C pvrefref
mp
l
l 0
2
0
cos1 π
ϑϑ
r i r' su poznate funkcije od x-a, a pC je funkcija od ϑ i od x-a koja je određena u prethodnom pod-
poglavlju. Kad nema napadnog kuta onda je koeficijent tlaka pC samo funkcije od x , pa se prvi
integral pojednostavljuje:
( ) ( ) ( )∫ ′⋅⋅=l
0
2 dxxrxrxCS
C pref
pxπ
a druga dva su jednaka nuli.
Primjer Izračunati normalnu silu rotacionog tijela kao na slici 6-6. i to po dijelovima:
• na prednjem polueliptičnom dijelu
• na srednjem cilindričnom dijelu i
• na zadnjem tangencijalnom oživalu.
Bl
D
D D2
Slika 6-6

6-22
Konkretno uzeti da je
DmD
B 104==
l
smasmV
5.316240
==∞
Napravljen je program koji računa xpC (aksijalnu sila), zC (normalna sila s promjenjenim znakom),
te tri komponente normalne sile: za prednje dio znC ("nose"), za cilindrični dio zcC i za zadnji dio
zaC ("after body"). Program se nalazi u fileu Programi\body\body_alfa.m kao i njegove rutine
za crtanje među rezultata (geometrija.m, izvor_dipol.m i poremecaji.m) nalazi se u direktoriju
S tim programom dobiveni su rezultati
Cxp = -0.0481
Czn = 0.1792 Czc = 0.0098 Cza = -0.1813
Cz = 0.0077
Kao što se vidi normalna sila je približno ista na prednjem i zadnjem dijlu, ali su suprotnog znaka.