2015 瞽贤庞特里亚金 -...
92
瞽贤庞特里亚金 一位瞽贤大师走完了艰难的旅程,度过了光辉的一生。 系统与控制 钱学森与系统科学 话说指南车及其所应用的不变性原理 纵横 中科院数学与系统科学研究院 中国自动化学会控制理论专业委员会 主办 第2卷 第1期 2015 All About Systems and Control ISSN 2373-7905
Transcript of 2015 瞽贤庞特里亚金 -...

瞽贤庞特里亚金一位瞽贤大师走完了艰难的旅程,度过了光辉的一生。
系统与控制
钱学森与系统科学话说指南车及其所应用的不变性原理
纵横
中科院数学与系统科学研究院
中国自动化学会控制理论专业委员会
主办
第2卷
第1期
2015
All About Systems and Control
ISSN 2373-7905
人工智能,特别是目前信息学部的“脑科学”,散人一向认为是一个
动机上全心全意服务于人类,本质上却深具反人类自然特性的东西。这是
一个关乎当代信息科学发展的悖论。
即使霍金担心的机器造反1)永远不会发生,我们也将不可避免地成为机
器系统支撑的强大到不可反抗的专制统治的奴隶。
在未来脑科学高度技术化的世界里,我们将没有任何隐私——各类像
当前摄像监控系统一样的读脑仪,甚至是手持式、移动式、针孔缩微式、
局域蜂窝态的人脑思维探测分析解读系统无线终端……,将会不以任何个
人意志为转移地布满在我们日常生活的各类角落的各样间隙里:时空环境
的、物理生化的、信息虚拟的……
这将是一个人类失去人性自由的终极世界,是人作为人的终极悲哀:
无论谁掌握了这个魔戒,都将无法抵制它的魔力。《魔戒》中的小哈比特
人也毫无用处。
在将这个情景拍成的电影里,一个可能的镜头是:在经历无数牺牲之
后侥幸毁去了魔戒,却因为制造技术的便捷与多元,横扫中土世界的索伦
之眼那邪恶的魔力将迅速复辟。人性的黑暗面:贪婪、惰性与傲慢,将使
它永生,并最终泛滥、失控!
人工智能,就是一枚反人类的智慧果。
这枚于圣经记载中上帝警示过的禁果,在伊甸园的废墟上,经过无数
岁月的生长,在上个世纪中叶,伴随着咬了一口的苹果而后长眠的天才图
灵的催生,它改头换面、终于再次开花结果了。而那欲火成就的翩翩夏
娃,又化身回来了。她风姿绰约、清新明媚、温婉而贤淑:直到禁果成熟
的那一刻的激发。
这一次,伊甸园湮灭后的残缺遗址:失乐园,我们也将失去。那位彰
显上帝存在性最有成效的功勋天使:魔鬼,将微笑着,于地狱的门口,迎
接我们,接受世界末日的审判。
这,或许是我们不二的宿命。而正如此:人,才成为了人。
散人乱蝉·人工智能
云中散人 南京理工大学自动化学院
1)“小国寡民,使有什伯之器而不用,使民重死而不远徙。虽有舟舆,无所乘之。
虽有甲兵,无所陈之。使民复结绳而用之。甘其食,美其服,安其居,乐其俗。邻国
相望,鸡犬之声相闻,民至老死不相往来。”(《老子》18章)。

目录 CONTENTS 2015年第1期 总第3期
科学人物
05
宋牮:
瞽贤庞特里亚金
于景元:
钱学森与系统科学
毛剑琴:
纪念我的导师林士谔先生
雍炯敏、张旭:
李训经
学科史林
44
万百五:
话说指南车及其所应用的不变性原理
教学交流
57
何毓琦:用一小时、十分钟、一分钟和一句话阐释滤波(估计)
专家论丛
65
宋牮:
还原论和系统论
王乐一、 赵平信息时代反馈机理的演化进展
05
11
23
34
65
70

茶余饭后
88
常迷路的大师
漫谈系统与控制
83
李言俊:
深山沟中铸利剑
第一届编委会 (2014.1.1-2017.12.31)
主编:张纪峰
副主编:狄增如、冯德兴、李少远
编委:
陈 虹、陈 杰*、陈 杰**、陈本美、
程代展、邓飞其、狄增如、冯德兴、
高 岩、郭宝珠、霍 伟、姜钟平、
李少远、潘 泉、秦化淑、丘 立、
申铁龙、汪小帆、张纪峰、周克敏、
邹 云
* 北京理工大学 **香港城市大学
来稿请寄:
北京中关村东路55号
中国科学院数学与系统科学研究院
控制理论专业委员会收
邮政编码:100190,电话:010-82541403
电子投稿Email地址:[email protected]
CONTENTS 目录2015年第1期 总第3期
系统与控制纵横主办单位
中国科学院数学与系统科学研究院
中国自动化学会控制理论专业委员会
逸闻趣事
77
吕金虎:
系统理论揭示鸟群形成之谜
编辑:贺瑞君、武宁哲、牛园园
美编:王林
制作:中国自动化学会控制理论专业委员会
2015年7月印刷

系统与控制纵横 2015年第1期4

2015 No.1 All About Systems and Control 5
科学人物
瞽贤庞特里亚金*
1957年,我在包曼高工已念了四年炮工,专业是高炮自动
控制。数学是该技术的脊梁。计算弹道、炮筒设计、雷达跟
踪、伺服控制等都需要数学。1957年莫斯科大学数学力学系开
办了“工程师数学进修夜校”,学制两年,每晚8点到10点两
节课。我刚进五年级,心想到毕业时还有一年半,来得及学完
大部课程,立即报考,被录取。从此昼夜就读于两个学校,坚
持了两年,直到毕业。
莫斯科地望北纬55度,夏日短暂,转瞬即逝,与南方冬天
反衬。机关学校放假两月,纷纷去赶晒宝贵的阳光。9月初上
班,白昼迅速缩短,冬季长达9个月。早上6点起床,7点进地
铁,8点钟上课,尽在黑夜中,从不见清晨日出。下午4、5点
太阳已落,无睹落霞黄昏。莫斯科人好像终生都在黑夜中度
过,重大事件都发生在夜间。本校下课后,已是夜色朦胧,半
城灯火,跑步奔向地铁,从东城赶往西南郊列宁山上的莫斯科
大学听课。车行约需1小时,只能在车上复习前课赶作业,不
容旁骛。夜校晚10点下课,11点才能回到宿舍,胡吃点东西权
当晚饭。子夜后转向明日轮回。匆忙终日,激扬于数形,觉得
时有收获,天天有长进。
夜校第一堂课是微分方程,授课的竟然是著名的盲人数学
家列夫·谢苗诺维赤·庞特里亚金(Lev S. Pontryagin, 1908-
1988)。200多学员,第一次见到他都目瞪口呆,惊讶不已。
他坐在讲台一侧口授,一位女孩在黑板上写公式。庞那年49
岁,标准俄罗斯人形象,中等身材,头发稍曲,双眼凹陷,深
不可测,总低头沉思,静谧如禅。讲课声音不低不亢,不快不
慢,句句清晰,语气笃定,基如磐石,无一废字,极便于学员
作笔记。他习惯用右手五指分夹住一串念珠,左手不断改换珠
宋牮 中国工程院
列夫·庞特里亚金
* 此为宋健近述《回忆录》中的一节

系统与控制纵横 2015年第1期6
位,像在打算盘,令人想起中国寺庙中念经的道
长。他细听着助教在黑板上写念的数学公式,不
时提示纠错,“不对,那里应是小于等于而不是
等于”,或者笑着说“尼娜又胡说了!第三项应
该放在大括号外面。”写满黑板的公式,他“看
得”比我们还清楚。那两节课,我们的注意力全
在窥探盲师的神秘动作和风范。他讲课通俗易
懂,偶尔联系力学、电学、控制实例,很少引用
抽象概念,学员无玄虚之感。只用了一个学期就
把常微分方程课讲完。五年后此讲义由苏联科学
院出版,获国家列宁科学奖[1]。
列夫·庞特里亚金十月革命前出生在莫斯科
一个平民家庭,父母都来自农村。父亲是会计,
读过6年小学,一战时被征当兵,被德军俘虏,战
后遣返回国。母亲是裁缝女工,只读过一年书。
列夫8岁入小学,13岁时因修煤油灯发生爆炸,
双眼失明,眼球被摘除。忍盲回校续读,17岁中
学毕业。开始想学音乐谋生,练了三年钢琴,不
成功。文科考的不好,改学数学。1925年考入莫
斯科大学物理数学系,读四年大学又两年研究
生,成绩优秀,受到数学老师帕维尔·亚历山大
洛夫(Pavel S. Alexandrov,1896-1982)的喜爱
和悉心指导长达十年。大学时期随老师所好,对
几何、拓扑产生了浓厚兴趣,屡有奇想,写过四
篇论文,由老师帮他译成德文发表。最著名的是
他找到了从球面Sn+1 到Sn , n>2,的所有同伦映射
类,至今常被引用,对代数拓扑同调、同伦理论
的发展起到了开拓和推动作用,奠定了他在代数
拓扑领域中的先驱地位。毕业后留校,27岁成为
教授,被授予博士学位。31岁被聘为苏联科学院
数学所拓扑几何研究室主任,同年当选为通讯院
士。50年代转向应用数学,投入控制论的研究,
组领团队,在最优控制和微分博弈问题中取得突
破性成就,成为控制论学科的里程碑,当今以
“庞特里亚金极大原理”著名于世,广泛应用于
物理、力学航天和自动控制等工程实践。1958年
当选苏联科学院院士,1966年当选国际宇航科学
院院士,1969年被授予全苏劳动英雄称号。一生
获国内外褒奖无数[2,3]。
据庞特里亚金晚年回忆,他能从幼年致命
的瞽灾中冲出,活过荣光的一生,除自己超强
列夫·庞特里亚金的父亲(1904)谢苗·阿奇
莫维赤·庞特里亚金(Semyon A. Pontryagin,
1875-1927)
母亲(1904)塔琪雅娜·安德烈夫娜·庞特里亚
金(Tachiyana A. Pontryagin,1880-1972)

2015 No.1 All About Systems and Control 7
的记忆和想象力,终生不息的蹚火拼搏精神外,
起决定作用的是母爱和导师亚历山大洛夫的伯乐
师情。幼年时,父亲参战被俘,后又早逝。失明
后,妈妈爱子如命,护他大半生,直到92岁去
世。为谋生计,先送他学音乐,三年未成。改学
数学,为他请老师,家教三年,培育了对数学
的爱好。1925年苏联革命高潮中,要报考大学,
出身非工农,父又是德俘沙俄兵,政审通不过,
母亲奔诉各级,疏通关系才获准。进大学后,早
晚乘公交1小时,多由妈妈接送。后挂“盲人公
示”,每求助同乘引路。为助子作数学,年近50
的母亲开始学德语、英语,数学,打字,写信,
为他读听数学论文,抄写笔记。据科学观察,常
人从外界所得信息知识,80%靠视觉,听力和其
他贡献很小,故云眼睛是灵魂的窗户。没有盲文
读物,列夫全靠听力学习,形数万变,两耳知
音,唯一工具是录音机和打字机。
被聘为教授后,1935年他决心写第一本书
《连续群》,费时两年,背诵出40万字草稿。初
披头散发,差强人意,由老师亚历山大洛夫帮他
修改文字,重编章节,由母亲打印和填写公式,
于1938年在美国普林斯顿出版,一举成名,震动
了科学界。三年后此书获苏联国家奖。二战后被
视为经典译成各种文字出版[3]。
二战后的自动化运动改变了庞特里亚金的研
究方向。50年代初,苏政府号召科学家理论联系
实际,数学所领导建议他转向应用数学研究。他
自己也感到“拓扑学虽美,属阳春白雪,太抽
象,实用少,仅少数人能欣赏”[2]。在政治形势
和自我沉郁双重压力下,他与三位学生(书[2]的
作者)一起到工业部门调研,请工程专家讲课,
参观实物现场,搜析国外资料,斟酌两年多,确
定了以研究控制论为新方向,主攻最优控制理
论,去“证明数学的潜力和存在价值”。
自1956年,庞特里亚金领导的小组陆续发表
关于最优控制的最新研究成果,今称之为极大值
原理,找到了在最一般情况下最优控制的必要和
部分充分条件,与经典最小作用原理相洽,构
建了从18-19世纪欧拉(1707-1783)-拉格朗日
(1736-1813)、哈密顿(1805-1865)的解析力
学到新生控制论之间的桥梁,对正在费尽心机解
决各种自动控制问题的工程界不啻振聋发聩,一
大批工程技术问题变得豁然开朗,迎刃而解。这
居然是一位盲人数学家领导获得的成就,就更加
令人敬佩。此前,外行人很少知道他在拓扑学方
面的成就。极大值原理公布后,崇敬他的粉丝遍
布全球。
航天科学界最早觉察到极大值原理对宇航
的 重 要 , 首 选 他 为 国 际 宇 航 科 学 院 荣 誉 院 士
(1966)。正在航天领域雄心勃勃领先世界的苏
联政府授予他列宁勋章(1967)和劳动英雄称号
(1969)。在数学界也名望大振,旋即被选为国
际数学联合会副主席(1970)。通过理论联系实
际,庞特里亚金达到了一生的荣耀巅峰。1960年
列夫·庞特里亚金(前左)1930年代在拓扑学研
讨班上。旁边是数学家帕维尔·谢尔杰维赤·亚历
山大洛夫
系统与控制纵横 2015年第1期8
被邀为国际自动控制联合大会(IFAC,1960)首
席报告人。邀他讲学的信函如雪片飞来,10年访
学欧美各国15次,成为世界数学明星大师,冷战
时代的苏联火炬。他实现了自己的理念,证明了
“数学和数学家们的存在价值”。
IFAC大会后,我们去旁听庞主持的讨论班。
中间我憋不住插话,“极大值原理使费德鲍姆的n
段定理一目了然,用等时场综合最速控制系统成
为可能。”他小声问,“这是谁?”同学布特柯
夫斯基(Butkovski A.)告“他是中国研究生”。
他微笑着自言自语:“那当然可能”。过去很少
见过他有笑容。
极大值原理的成功和广泛应用使庞特里亚金
愈加坚定他的信念:认识客观世界和改进工程实
践是数学的天赋和向前发展的源头活水。他极力
反对把数学引向孤芳自赏的独立王国,与人类生
活隔离的柏拉图主义倾向,斥之为唯心主义的形
而上学。他不喜欢泛函分析,不相信希尔伯特或
布尔巴基所倡建的公理体系能长成天国乐园。他
公开反对在中学教科书中大讲集合论,认为那将
“疏远青少年与客观世界的距离,窒息他们对自
然和生活的灵感”。 此论曾惹起主张中学教科书
现代化的数学家们强硬反抗,双方音高弦绝,激
烈争论了长达十年之久。的确,庞特里亚金的数
学论文和名著中很少从公理体系出发,从不先圈
定函数空间,需要什么拈什么,倒甚方便。证明
极大值原理时,在可微函数类C1的运算中背例采
用了δ-函数的“针状变分(Spike Variation)”,
大大简化了推理过程,未见有人反对,反而纷纷
称奇。
庞特里亚金出生于十月革命前,成长于苏联
时代。双目失明后,受母爱呵护,母子相依为命
64年。上大学后脱颖而出,老师、学校、政府视
为国宝,尽心关怀。本人勤奋,全心献身数学,
一路风顺,登上巅峰,赢得全世界敬仰。但是,
阴晴圆缺,不测风云,世事沧桑,人无完福。有
些苦衷使他终生不能豁达。
1934-1939年苏联发生了全民恐怖的肃反运
动。数百万干部、党员被拘捕,或以“人民敌
人”污名被杀害。1939年恶浪波及到科学界。
有人控告苏联数学大师鲁津(N. N. Luzin, 1883-
1950)“反苏反党”,中央报纸上点名“揭露鲁
津的真面目”。刚当选通讯院士,31岁的庞特里
亚金不相信他崇敬的这位数学家会“反革命”,
打电话表示慰问,还在揭批大会上发言,公开为
他辩护。此举引起同行震惊,一时失去了上级和
师生对他的信任。他的老师,知内情的亚历山大
洛夫警告他,“你的行为十分危险,你怎么能打
电话给他,在大会上说那种话?!”从此与他
拉开了距离。后来分道扬镳,屡生龃龉,劳燕分
飞,留下一生苦涩。
其次是家事不畅。父亲去世(1927)后,母
子相依为命,形影相吊。母亲主持家务,万事
亲躬,护犊爱深责切,专断独裁。列夫无法反
抗,只能用顺从回报母爱。1941年6月22日苏德
战争爆发,已当选为通讯院士的列夫受到政府保
护,随数学所撤离莫斯科,疏散至1500千米以东
的喀山。他遵母亲之命与其好友之女塔西娅·伊
万诺娃结婚后共同撤离。两年后战争危机刚过,
全家随数学所迁回莫斯科。患难中易处,和平时
难容。母亲嫉妒媳妇夺走儿子,对她百般限制,
千种约束,事事冲突,天天吵架,拍枱倒凳,鸡
犬不宁。塔西娅终于忍无可忍,独自跑到列宁格
勒去攻读生物学学位,誓死不再回莫斯科,只好
于1952年离婚。缺乏理智的母爱终于搅黄了儿子
的婚姻。6年后庞才遇到另位意中人,乡村医生
阿历山达·依格纳夫娜,月老是数学家德洛讷
(Delone B.N.),于1958年再婚。同年当选为

2015 No.1 All About Systems and Control 9
院士,双福迭至。妈妈虽已年近80,性格依旧,
专断更甚,又与新媳不和。再吵闹十多年,直到
1972年92岁去世为止,此时庞特里亚金已64岁。
家事不畅是庞一生的痛苦。先哲孟德斯鸠(1689-
1755)总结人类史说,“凡领袖当久了,都有走
向专制的倾向,应限期更换”,这是指国家政
治。对家庭不能适用,亲妈不能换。
庞特里亚金在苏联时代长大成名,千种理由
使他热爱自己的祖国,憧憬着美好的未来。60岁
以后,他希望从“证明定理的劳作”中淡出,转
向更旷达的命题,做点入世大事,都不算成功。
1967年发生第三次中东战争,以色列空军发动突
然袭击,摧毁了埃及的空军主力和叙利亚、约旦
的大量飞机,地面部队6天内占领了西奈半岛、
加沙、约旦河西岸和戈兰高地。五年后的1973
年,埃及、叙利亚和约旦等为收复失地,联合组
织50万军队突然进攻以色列,发起第四次中东战
争。从10月6日至10月24日激战18天,双方伤亡
惨重,以色列转败为胜,最后由联合国监督停
战。苏联支持阿拉伯各国,美国全力支持以色
列,形成冷战时期美苏对峙高潮。苏政府阻止苏
犹学者迁居以色列,支持以色列的各国科学家
发起反苏运动。庞特里亚金挺身而起,为苏联
政策辩护,带头抵制参加某些国际学术会议。
团队内部又与他的犹裔学生合作者波勒强斯基
(V.G. Boltyanskii)因版权争议闹翻,从而被诽
为“反犹主义者”恶名。孰知政治形势多变,80
年代戈尔巴乔夫执政后,又否定了苏联过去的政
策,恢复了与以色列的友好关系,开放向以色列
移民,庞觉得苦涩不堪。直到晚年他仍念念为自
己的言行辩解,显得苍白,不像他的极大值原理
和同伦映射那样令人信服。他可能已意识到,
这类“大事”属于NP难题(Non-Deterministic
Polynomials),不可能在有限时间内用数学方法
求解。
早在1960年代,苏联农业、水利、经济界发
起一项北水南调倡议:从流入北冰洋的伯朝拉河
(Pechora)和北德维纳河(Severnaya Dvina)调
水向南,补充到伏尔加河,以提高后者的航运、
发电、农灌能力,最终流入和拯救正在消失的里
海。伏尔加是俄国的母亲河,流域136万平方千米
,人口占俄国欧洲的1/4。河畔水网自古是俄国粮
仓。沿3700千米干流上建有12座阶梯水电站,装
机近1000万千瓦,是苏欧的主力电源。那首民歌
《伏尔加船夫曲》和画家列宾的《伏尔加河上的
纤夫》油画家喻户晓,成为俄罗斯的乡愁图腾。
70年代苏政府把调水工程正式列为长远规划
科研项目,由苏联科学院水利资源所和新成立的
北水南调研究所共同负责论证。经过十多年的地
理勘察和分析论证,提出了实施方案,引起全社
会关注:一期工程年调水58亿立方米,二期提
高到每年150亿立方米。庞特里亚金觉得兹事体
大,于1986年亲自致信戈尔巴乔夫总书记,表示
坚决反对水利部门的调水方案,理由是(一)降
水、干旱、气候变化等自然过程太复杂,影响因
素太多,随机性很大,不可能准确预测;(二)
两个研究所的预测不可信任,数学模型本身考虑
不周,数据有严重错误;(三)“北水南调研究
列宾油画:《伏尔加河上的纤夫》

系统与控制纵横 2015年第1期10
所”的名字就惹人生疑,他们必须证明调水方案
的合理性,否则就没有成就。应该停止拨款,解
散这个所。总之,他呼吁,这项计划十分昂贵,
不合时宜,极其危险,应该撤消[1]。戈尔巴乔夫对
庞的建议毫无反应,他的注意力全不在此[6]。局
外人对这项计划的可行性无以置喙。但对他完全
否定系统分析的预测能力,颠覆了计划经济学派
的理念,各界颇有微词。是经历感悟,或数学理
喻?他没有解释。的确,谁也没能预测到,仅5年
后连他所痴爱的苏联也不复存在,反证了他的呼
号不虚[6]。
庞特里亚金于1988年5月3日逝世,享年80
岁。一位瞽贤大师走完了艰难的旅程,追随欧
拉、拉格朗日等先贤,度过了光辉的一生。身后
却是另一个悲壮时代,树倒枝散,悲怆世坛,抱
迷茫而长终。时间不能倒流,往事又不可追,真
理仍在遥涯,数学和炮兵都无奈。
参考文献
Pontryagin L S. Memoir. Moscow, 1998(俄文).[1]
Pontryagin L S, Gamcrelidze R V , Boltryansky and [2]
Mishenko E F. The Mathematical Theory of Optimal
Processes. Johu Wiley & Sons, 1961.
Pontryagin L S. Topogical Group(1938). 中译本,连[3]
续群. 曹锡华译. 科学出版社,1957.
庞特里亚金 L S. 常微分方程. 金福临、李训经译.上[4]
海科技出版社,1962.
庞特里亚金 L S. 最优化和微分博弈(俄文). 苏联[5]
科学院通报, 1978,N7,10-17.
戈尔巴乔夫. 孤独相伴——回忆录. 潘兴明译. 译林[6]
出版社,2015.
【作者简介】宋健(笔名宋牮),控制论、系统工程和
航空航天技术专家。1960年毕业于莫斯科包曼高等工
学院研究生院,先后获副博士和科学博士学位。曾任国
家科委主任、国务委员、国家科教领导小组副主任、中
国工程院院长、全国政协副主席等职。现任中国工程院
主席团名誉主席、中华环保联合会主席。
中国科学院和中国工程院两院院士;俄罗斯科学
院、美国国家工程院、瑞典皇家工程科学院、南斯拉夫
工程院外籍院士;墨西哥国家工程院、阿根廷国家工程
院通讯院士;国际宇航科学院院士。
在控制论研究、航天技术和人口控制论三方面做出了
系统的、创造性的成就和贡献。建立了最优控制场论,
完整地解决了线性系统的最速系统的综合理论;首创人
口控制论新交叉学科,研究建立了人口控制模型,发
现和证明了“人口生育双向极限定律”;发起并主持了
面向农村的“星火计划”和发展高技术产业的“火炬计
划”;组织实施了“863计划”;发起了“夏商周断代
工程”;为推动中国科学事业发展及确立“科教兴国”
战略作出了重大贡献。
曾获国家科学大会奖、国家自然科学成就奖、国家
科技进步一等奖、香港“何梁何利科技成就奖”以及国
际数学模型协会艾尔伯特·爱因斯坦奖、意大利雷昂纳
多·达芬奇奖等多个国内外重要奖项。
2014年10月8日,国际小行星命名委员会批准,将
中国科学院紫金山天文台2007年8月16日发现的国际编
号为210210号小行星正式命名为“宋健星”。

2015 No.1 All About Systems and Control 11
科学人物
钱学森与系统科学
于景元 中国航天系统科学与工程研究院
系统科学是现代科学技术体系中一个新兴的
科学技术部门,并在迅速发展之中,而且越来越
显示出其强大生命力。
钱学森是我国系统科学的开创者和奠基人。
钱老虽然离开了我们,但他的科学创新精神却依
然活在人们心中,特别是钱学森科学思想和科学
成就是留给我们的宝贵财富,我们应该认真学习
和研究。
钱学森的一生是科学的一生、创新的一生和
辉煌的一生。在长达70多年丰富多彩的科学生涯
之中,钱学森建树了许多科学丰碑,对现代科学
技术发展和我国社会主义现代化建设作出了巨大
贡献。
钱老对我国火箭、导弹和航天事业的开创性
贡献,是众所周知的,人们称他为“中国航天之
父”。但从钱学森的全部科学成就和贡献来看,
这只是其中一部分。钱老的研究领域非常广泛,
从工程、技术、科学直到哲学的不同层次上,在
跨学科、跨领域和跨层次的研究中,特别是不同
学科、不同领域、不同层次的相互交叉、结合与
融合的综合集成研究方面,都作出了许多开创性
贡献。这些方面的科学成就与贡献,从现代科学
技术发展趋势来看,其意义和影响可能更大、也
更深远。
钱学森的系统科学成就和贡献就是其中的重
要方面。
从现代科学技术发展的特点来看,以下几个
主要方面都与系统科学密切相关:
1. 现代科学技术发展呈现出既高度分化又高
度综合的两种明显趋势
一方面已有的学科和领域越分越细,新学科
新领域不断产生;另一方面是不同学科、不同领
域相互交叉、结合与融合,向综合集成的整体化
方向发展,这两者是相辅相成,相互促进的。系
统科学就是后一发展趋势中的科学技术。
2. 复杂性科学的兴起引起国内外的高度重视
20世纪80年代中期,国外出现了复杂性研
究。复杂性研究和复杂性科学也处在高度综合这
个趋势中,与系统科学有着密切的关系。
复 杂 性 研 究 和 复 杂 科 学 的 开 创 者 之 一 默
里·盖尔曼(Murray Gell-Mann),在他所著的
《夸克与美洲豹》一书中,曾写道:“研究已表
明,物理学、生物学、行为科学,甚至艺术与人
类学,都可以用一种新的途径联系到一起,有些
事实和想法初看起来彼此风牛马不相及,但新的
方法却很容易使它们发生关联”。
系统与控制纵横 2015年第1期12
盖尔曼在他的书中并没有说明这个新途径和
新方法是什么,但从他后来关于复杂系统和复杂
适应系统的研究中可以看出,这个新途径就是系
统途径,这个新方法就是系统方法。
3. 科学方法论的发展
从近代科学到现代科学的发展过程中,科学
方法论经历了:从还原论方法到整体论方法再到
系统论方法。系统论方法的产生与系统科学的出
现和发展紧密相关。
4. 以计算机、网络和通信为核心的现代信息
技术革命,改变了人类思维方式,出现了人-机结
合、以人为主的思维方式,这种思维方式比人脑
思维具有更强的思维能力和创造性,人类更加聪
明了,有能力去认识和处理更加复杂的事物。这
种思维方式也为系统论方法提供了理论基础和技
术基础。
5. 创新方式的转变
由以个体为主向以群体为主的创新方式转
变,出现了创新体系,特别是国家创新体系已成
为创新驱动发展的强大动力。
6. 现代社会实践越来越复杂,越复杂的社会
实践其综合性和系统性就越强,因而也就更加需
要系统科学和系统工程。
钱学森系统科学思想和系统科学体系集中地
体现出以上这些特点。
一、钱学森系统科学思想和系统科学体系的形成与发展
系统科学思想一直贯穿于钱学森的整个科学
历程。
大家知道,钱老在美国学习和工作了20多年
(1935-1955),主要从事自然科学技术研究,
特别是在应用力学、喷气推进以及火箭与导弹研
究方面,取得了举世瞩目的成就,同时还创建了
“物理力学”和“工程控制论”,成为国际著名
科学家。
需要强调指出的是,工程控制论已跨出了自
然科学领域,而属于钱老后来所建立的系统科学
体系,并为创建系统科学体系提供了理论基础。
自然科学是从物质、物质结构和物质在时空
中运动的角度来研究客观世界的。但工程控制论
要研究的并不是物质运动本身,而是研究代表物
质运动的事物之间的关系,研究这种关系的系统
性质以及如何控制系统使其具有我们期望的功
能。因此,系统和系统控制是工程控制论所要研
究的基本问题。
钱 老 创 建 工 程 控 制 论 这 个 事 实 表 明 , 在
这 个 时 期 , 钱 老 已 开 始 进 行 跨 学 科 、 跨 领 域
的 研 究 并 取 得 重 要 成 就 。 《 工 程 控 制 论 》 一
书的出版(1954年出版英文版,Engineer ing
Cybernetics),在国际学术界引起了强烈反响,
立即被译成多种文字出版发行(俄、德、中)。
工程控制论所体现的系统科学思想、理论方法与
应用,直到今天仍然深刻地影响着系统科学、控
制科学、管理科学等有关学科的发展。
1955年钱老回到了祖国,从这时起他的主要
精力集中在开创我国火箭、导弹和航天事业上。
在周恩来、聂荣臻等老一辈无产阶级革命家的直
接领导下,钱老的科学才能和智慧得以充分发
挥,并和广大科技人员一起,在当时十分艰难的
条件下,研制出我国自己的导弹和卫星来,创造
出国内外公认的奇迹。
以导弹、卫星等航天科技为代表的大规模科
学技术工程,如何把成千上万人组织起来,并以
较少的投入在较短的时间内,研制出高质量、高
可靠的型号产品来,这需要有一套科学的组织管
理方法与技术。当时这是一个十分突出的问题。
钱老在开创我国航天事业的过程中,同时也
开创了一套既有普遍科学意义、又有中国特色的
2015 No.1 All About Systems and Control 13
系统工程管理方法与技术。
当时,在研制体制上是研究、规划、设计、
试制、生产和实验一体化;在组织管理上是总体
设计部和两条指挥线的系统工程管理方式。实践
已证明这套组织管理方法是十分有效的。
从今天来看,就是在当时条件下,把科学技
术创新、组织管理创新与体制机制创新有机结合
起来,实现了综合集成创新,从而走出了一条发
展我国航天事业自主创新和协同创新的道路。我
国航天事业一直在持续发展,其根本原因就在于
自主创新和协同创新。
航天系统工程的成功实践,证明了系统工程
技术的科学性和有效性,中国航天事业的成功也
是系统工程的胜利,它不仅适用于自然工程,其
原理也同样适用于社会工程,从而开创了大规模
工程实践的系统管理范例,对其他大规模工程实
践也是适用的。系统工程的应用也是钱老对管理
科学与工程的重大贡献。
航天系统工程的实践为钱老建立系统科学体
系奠定了实践基础。
20世纪80年代初,钱老从科研一线领导岗位
退下来以后,就把全部精力投入到学术研究之
中。这一时期,钱老的学术思想之活跃,涉猎领
域之广泛,原始创新性之强,在学术界是十分罕
见的。
在这个阶段,钱老花费心血最多、也最有代
表性的是建立系统科学体系和创建系统学的工
作。在创建系统学的过程中,提出了开放的复杂
巨系统及其方法论,由此又开创了复杂巨系统科
学与技术这一新的科学领域,并把系统科学体系
推向了复杂巨系统科学体系。
这些成就标志着钱学森系统科学思想和系统
方法有了新的发展,达到了新的高度,进入了新
的阶段。特别是钱学森综合集成思想与综合集成

系统与控制纵横 2015年第1期14
系统是系统科学研究和应用的基本对象。系
统科学和自然科学、社会科学等不同,但有深刻
的内在联系。系统科学能把自然科学、社会科学
等领域研究的问题联系起来作为系统进行综合
性、整体性研究。这就是为什么系统科学具有交
叉性、综合性和整体性的原因。也正是这些特
点,使系统科学处在现代科学技术发展的综合集
成的整体化方向上,并已成为现代科学技术体系
中一个新兴的科学技术部门。
系统结构、系统环境和系统功能是系统的三
个重要基本概念。系统结构是指系统内部,系统
环境是指系统外部。系统的一个最重要的特点,
就是系统在整体上具有其组成部分所没有的性
质,这就是系统的整体性。系统整体性的外在表
现就是系统功能。系统的这个性质意味着,对系
统组成部分都认识了,并不等于认识了系统整
体,系统整体性不是它组成部分性质的简单“拼
盘”,而是系统整体涌现的结果。
系统研究表明,系统结构和系统环境以及它
们之间的关联关系,决定了系统的整体性和功
能,这是一条非常重要的系统规律。
方法,已贯穿于工程、技术、
科学直到哲学的不同层次,形
成了综合集成体系。
综合集成思想与综合集成
方法的形成与提出,是一场科
学思想和科学方法的革命,其
意义和影响将是广泛而深远
的。就现实而言,也有着极为
重要的科学价值和实践意义。
钱学森指出,系统科学的
出现是一场科学革命。科学
革命是人类认识客观世界的飞
跃,系统科学究竟是研究什么的学问,又为什么
如此重要?
从辩证唯物主义观点来看,客观世界的事物
是普遍联系的,正如马克思所说“世界是普遍联
系的整体,任何事物内部各要素之间及事物之间
都存在着相互影响、相互作用和相互制约的关
系”。既然客观事物是普遍联系的整体,那就一
定有其客观规律,我们也就应该研究、认识和运
用这些规律。
能够反映和概括客观事物普遍联系这个事实
与特征最基本和最重要的概念就是系统。所谓系
统是指由一些相互联系、相互作用、相互影响的
组成部分构成并具有某些功能的整体。这样定义
的系统在客观世界是普遍存在的。客观世界包括
自然、社会和人自身。马克思这里所说的客观世
界是普遍联系的整体的思想就是辩证唯物主义系
统思想。
正是从系统思想出发并结合现代科学技术的
发展,钱学森明确提出,系统科学是从事物的整
体与部分、局部与全局以及层次关系的角度来研
究客观世界的,也就是从系统角度研究客观世
界。
图1 钱学森在系统学讨论班上
2015 No.1 All About Systems and Control 15
从理论上来看,研究系统结构与环境如何决
定系统的整体性和功能,揭示系统存在、演化、
协同、控制与发展的一般规律,就成为系统学,
特别是复杂巨系统学的基本任务。国外关于复杂
性的研究,正如钱老指出的,是开放复杂巨系统
的动力学问题,实际上也属于系统理论方面的探
索。
另一方面,从应用角度来看,根据上述系统
原理,为了使系统具有我们期望的功能,特别是
最好的功能,我们可以通过改变和调整系统结构
或系统环境以及它们之间的关联关系来实现。但
系统环境并不是我们想改变就能改变的,在不能
改变的情况下,只能主动去适应。而系统结构
却是我们能够改变、调整、设计和组织的。这
样,我们便可以通过改变、调整系统组成部分或
组成部分之间、层次结构之间以及与系统环境
之间的关联关系,使它们相互协调与协同,从
而在系统整体上涌现出我们满意的和最好的功
能,这就是系统组织管理、系统控制和系统干预
(intervention)的基本内涵,是系统管理、系统
控制等要研究的基本问题,也是系统工程、控制
工程等所要实现的主要目标。
科学是认识世界的学问,技术是改造世界的
学问,而工程是改造客观世界的实践。从这个角
度来看,系统科学和自然科学等类似,也有三个
层次的知识结构,即工程技术(应用技术)、技
术科学(应用科学)和基础科学。在钱学森建立
的系统科学体系中,包括:
1. 工程技术或应用技术层次上的是系统工
程,这是直接用来改造客观世界的工程技术,但
和其他工程技术不同,它是组织管理系统的技
术;
2. 技术科学层次上直接为系统工程提供理论
方法的有运筹学、控制论、信息论等;
3. 基础科学层次上、属于基础理论的便是系
统学和复杂巨系统学。
目前国外还没有这样一个清晰的系统科学体
系结构。
这样三个层次结构的系统科学体系经过系统
论通向辩证唯物主义哲学。系统论属于哲学层
次,是连接系统科学与辩证唯物主义哲学的桥
梁。一方面,辩证唯物主义通过系统论去指导系
统科学的研究,另一方面,系统科学的发展经系
统论的提炼又丰富和发展了辩证唯物主义。
关于系统论,钱老曾明确指出,我们所提倡
的系统论,既不是整体论,也非还原论,而是整
体论与还原论的辩证统一。
钱老关于系统论的这个思想后来发展成为他
的综合集成思想。根据这个思想,钱老又提出了
将还原论方法与整体论方法辩证统一起来的系统
论方法。
系统科学体系体现了钱学森的系统科学思
想。
综合以上所述,客观事物普遍联系及其整体
性思想就是系统思想,系统思想是辩证唯物主义
哲学内容,系统科学体系的建立就使系统思想从
一种哲学思维发展成为系统的科学体系,系统科
学体系是系统科学思想在工程、技术、科学直到
哲学不同层次上的体现。这就使系统思想建立在
科学基础上,把哲学和科学统一起来了。
系统科学思想是钱老对辨证唯物主义系统思
想的重要发展和丰富。
二、从系统科学到复杂巨系统科学
在系统科学体系中,系统工程已应用到实践
中并取得显著成就,如航天系统工程;技术科学
层次上的运筹学、控制论、信息论等也有了各自
的理论和方法,并处在继续发展之中。但系统学
和复杂巨系统学却是需要建立的新兴学科,这也
系统与控制纵横 2015年第1期16
是钱老最先提出来的。
20世纪80年代中期,钱老以“系统学讨论
班”的方式开始了创建系统学的工作。从1986年
到1992年的7年时间里,钱老参加了讨论班的全部
学术活动。
在讨论班上,钱老根据系统结构的复杂性提
出了系统新的分类,将系统分为简单系统、简单
巨系统、复杂巨系统和特殊复杂巨系统。如生物
体系统、人体系统、人脑系统、地理系统、社会
系统、星系系统等都是复杂巨系统。其中社会系
统是最复杂的系统了,又称作特殊复杂巨系统。
这些系统又都是开放的,与外部环境有物质、能
量和信息的交换,所以又称作开放的复杂巨系
统。
在讨论班的基础上,钱老明确界定系统学是
研究系统结构与功能(系统演化、协同与控制)
一般规律的科学,形成了以简单系统、简单巨系
统、复杂巨系统和特殊复杂巨系统(社会系统)
为主线的系统学基本框架,构成了系统学的主要
内容,奠定了系统学的科学基础,指明了系统学
的研究方向。
简单系统和简单巨系统都已有了相应的方法
论和方法,也有了相应的理论并在继续发展之
中,但复杂巨系统和社会系统却不是已有方法论
和方法所能处理的,需要有新的方法论和方法。
所以,关于复杂巨系统的理论研究,钱老又称作
复杂巨系统学。
从近代科学到现代科学的发展过程中,自然
科学采用了从定性到定量的研究方法,所以自然
科学被称为“精密科学”。而社会科学、人文科
学等由于所研究问题的复杂性,通常采用的是从
定性到定性的思辨、描述方法,所以这些学问被
称为“描述科学”。当然,这种趋势随着科学技
术的发展也在变化,有些社会和人文学科逐渐向
精密化方向发展,如经济学、社会学等。
从方法论角度来看,在这个发展过程中,还
原论方法发挥了重要作用,特别在自然科学领域
中取得了很大成功。还原论方法是把所研究的对
象分解成部分,以为部分研究清楚了,整体也就
清楚了。如果部分还研究不清楚,再继续分解下
去进行研究,直到弄清楚为止。按照这个方法
论,物理学对物质结构的研究已经到了夸克层
次,生物学对生命的研究也到了基因层次。毫无
疑问这是现代科学技术取得的巨大成就。
但现实的情况却使我们看到,认识了基本粒
子还不能解释大物质构造,知道了基因也回答不
了生命是什么。这些事实使科学家认识到“还原
论不足之处正日益明显”。这就是说,还原论方
法由整体往下分解,研究得越来越细,这是它的
优势方面,但由下往上回不来,回答不了高层次
和整体问题,又是它的不足一面。所以仅靠还原
论方法还不够,还要解决由下往上的问题,也就
是复杂性研究中的所谓涌现问题。
著名物理学家李政道对于21世纪物理学的发
展曾讲过:“我猜想21世纪的方向要整体统一,
微观的基本粒子要和宏观的真空构造、大型量
子态结合起来,这些很可能是21世纪的研究目
标”。这里所说的把宏观和微观结合起来,就是
要研究微观如何决定宏观,解决由下往上的问
题,打通从微观到宏观的通路,把宏观和微观统
一起来。
同样道理,还原论方法也处理不了系统整体
性问题,特别是复杂系统和复杂巨系统(包括社
会系统)的整体性问题。从系统角度来看,把系
统分解为部分,单独研究一个部分,就把这个部
分和其他部分的关联关系切断了。这样,就是把
每个部分都研究清楚了,也回答不了系统整体性
的问题。
2015 No.1 All About Systems and Control 17
更早意识到这一点的科学家是贝塔朗菲,他
是一位分子生物学家,当生物学研究已经发展到
分子生物学时,用他的话来说,对生物在分子层
次上了解得越多,对生物整体反而认识得越模
糊。在这种情况下,于20世纪40年代他提出了一
般系统论,实际上是整体论方法,强调还是从生
物体系统的整体上来研究问题。但限于当时的科
学技术水平,支撑整体论方法的具体方法体系没
有发展起来,还是从整体论整体、从定性到定
性,论来论去解决不了问题。正如钱老所指出
的,“几十年来一般系统论基本上处于概念的阐
发阶段,具体理论和定量结果还很少”。但整体
论方法的提出,确是对现代科学技术发展的重要
贡献。
20世纪80年代中期,国外出现了复杂性研
究。关于复杂性问题,钱老指出:“凡现在不能
用还原论方法处理的,或不宜用还原论方法处理
的问题,而要用或宜用新的科学方法处理的问
题,都是复杂性问题,复杂巨系统就是这类问
题” 。系统整体性,特别是复杂系统和复杂巨系
统(包括社会系统)的整体性问题就是复杂性问
题。所以对复杂性研究,国外科学家后来也“采
用了一个‘复杂系统’的词,代表那些对组成部
分的理解不能解释其全部性质的系统。”
国外关于复杂性和复杂系统的研究,在研究
方法上确实有许多创新之处,如他们提出的遗传
算法、演化算法、开发的Swarm软件平台,基于
主体(Agent)的系统建模,用主体描述的人工
生命、人工社会等。在方法论上,虽然也意识到
了还原论方法的局限性,但并没有提出新的方法
论。方法论和方法是两个不同层次的问题。方法
论是关于研究问题所应遵循的途径和研究路线,
在方法论指导下的是具体方法问题,如果方法论
不对,再好的方法也解决不了根本性问题。所以
方法论更为基础也更为重要。
如前所述,20世纪80年代初,钱学森明确指
出系统论是整体论与还原论的辩证统一。根据这
个思想,钱老又提出将还原论方法与整体论方法
辩证统一起来,形成了系统论方法。在应用系统
论方法时,也要从系统整体出发将系统进行分
解,在分解后研究的基础上,再综合集成到系统
整体,实现系统的整体涌现,最终是从整体上研
究和解决问题。
由此可见,系统论方法吸收了还原论方法和
整体论方法各自的长处,同时也弥补了其各自的
局限性,既超越了还原论方法,又发展了整体论
方法。这是钱学森在科学方法论上具有里程碑意
义的贡献,它不仅大大促进了系统科学的发展,
同时也必将对自然科学、社会科学等其他科学技
术部门产生深刻的影响。
20世纪80年代末到90年代初,结合现代信息
技术的发展,钱学森又先后提出“从定性到定量
综合集成方法”(Meta-synthesis)及其实践形式
“从定性到定量综合集成研讨厅体系”(以下将
两者合称为综合集成方法),并将运用这套方法
的集体称为总体设计部。这就将系统论方法具体
化了,形成了一套可以操作且行之有效的方法体
系和实践方式。从方法和技术层次上看,它是人-
机结合、人-网结合,以人为主的信息、知识和智
慧的综合集成技术。从应用和运用层次上看,是
以总体设计部为实体进行的综合集成工程。
综合集成方法的实质是把专家体系,数据、
信息与知识体系以及计算机体系有机结合起来,
构成一个高度智能化的人-机结合与融合体系,这
个体系具有综合优势、整体优势和智能优势。它
能把人的思维、思维的成果、人的经验、知识、
智慧以及各种情报、资料和信息统统集成起来,
从多方面的定性认识上升到定量认识。
系统与控制纵横 2015年第1期18
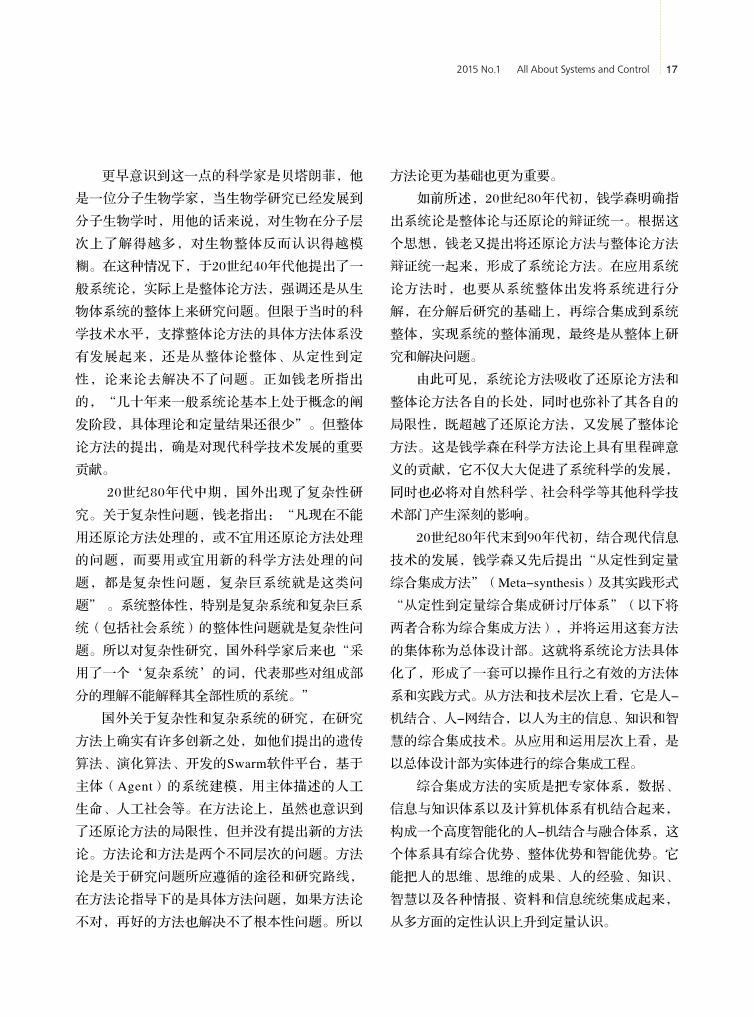
钱老提出的人-机结合以人为主的思维方式
是综合集成方法的理论基础。从思维科学角度来
看,人脑和计算机都能有效处理信息,但两者有
极大差别。关于人脑思维,钱老指出“逻辑思
维,微观法;形象思维,宏观法;创造思维,宏
观与微观相结合。创造思维才是智慧的源泉,逻
辑思维和形象思维都是手段”。
今天的计算机在逻辑思维方面确实能做很多
事情,甚至比人脑做得还好还快,善于信息的精
确处理,已有许多科学成就证明了这一点,如著
名数学家吴文俊的定理机器证明。但在形象思维
方面,现在的计算机还不能给我们以很大的帮
助。至于创造思维就只能依靠人脑了。然而计算
机在逻辑思维方面毕竟有其优势。如果把人脑和
计算机结合起来,那就更有优势,思维能力更
强,人将变得更加聪明,它的智能和创造性比人
要高,比机器就更高,这也是1+1>2的系统原理
(见图2)。
从上图可以看出,人-机结合以人为主的思维
方式,它的智能和认知能力处在最高端。这种聪
明人的出现,预示着将出现一个“新人类”,不
只是人,是人-机结合的新人类。
信息、知识和智慧是三个不同层次的问题。
有了信息未必有知识,有了信息和知识也未必就
有智慧。信息的综合集成可以获得知识,信息和
知识的综合集成可以获得智慧。人类有史以来是
通过人脑获得知识和智慧的。现在由于以计算机
为主的现代信息技术的发展,我们可以通过人-机
结合以人为主的方法来获得信息、知识和智慧,
而且比人脑还有优势,这是人类发展史上具有重
大意义的进步。
综合集成方法就是这种人-机结合以人为主获
得信息、知识和智慧的方法,它是人-机结合的信
息处理系统,也是人-机结合的知识创新系统,还
是人-机结合的智慧集成系统。
按照我国传统文化有“集大成”的说法,即
把一个非常复杂的事物的各个方面综合集成起
来,达到对整体的认识,集大成得智慧,所以钱
图2 思维方式和研究方式与认知能力的关系
智能与认知能力
思维方式和研究方式
机器 人-机结合以机器为主
人 人-机结合以人为主

2015 No.1 All About Systems and Control 19
老又把这套方法称为“大成智慧工程”。将大成
智慧工程进一步发展,在理论上提炼成一门学
问,就是大成智慧学。
从实践论和认识论角度来看,与所有科学研
究一样,无论是复杂系统和复杂巨系统(包括社
会系统)的理论研究还是应用研究,通常是在已
有的科学理论、经验知识基础上与专家判断力
(专家的知识、智慧和创造力)相结合,对所研
究的问题提出和形成经验性假设,如猜想、判
断、思路、对策、方案等等。这种经验性假设一
般是定性的,它所以是经验性假设,是因为其正
确与否,能否成立还没有用严谨的科学方式加以
证明。在自然科学和数学科学中,这类经验性假
设是用严密逻辑推理和各种实验手段来证明的,
这一过程体现了从定性到定量的研究特点。
但复杂系统和复杂巨系统(包括社会系统)
由于其跨学科、跨领域、跨层次的特点,对所研
究的问题能提出经验性假设,通常不是一个专
家,甚至也不是一个领域的专家们所能提出来
的,而是由不同领域、不同学科的专家构成的专
家体系,依靠专家群体的知识和智慧,对所研究
的复杂系统和复杂巨系统(包括社会系统)问题
提出经验性假设。
但要证明其正确与否,仅靠自然科学和数学
中所用的各种方法就显得力所不及了。如社会系
统、地理系统中的问题,既不是单纯的逻辑推
理,也不能进行实验。但我们对经验性假设又不
能只停留在思辨和从定性到定性的描述上,这是
社会科学、人文科学中常用的方法。
系统科学是要走“精密科学”之路的,那么
出路在哪里?这个出路就是人-机结合以人为主的
思维方式和研究方式。采用“机帮人、人帮机”
的合作方式,机器能做的尽量由机器去完成,极
大扩展人脑逻辑思维处理信息的能力。通过人-
机结合以人为主,实现信息、知识和智慧的综合
集成。这里包括了不同学科、不同领域的科学理
论和经验知识、定性和定量知识、理性和感性知
识,通过人-机交互、反复比较、逐次逼近,实
现从定性到定量的认识,从而对经验性假设正确
与否做出科学结论。无论是肯定还是否定了经验
性假设,都是认识上的进步,然后再提出新的经
验性假设,继续进行定量研究,这是一个循环往
复、不断深化的研究过程。
综合集成方法的运用是专家体系的合作以及
专家体系与机器体系合作的研究方式与工作方
式。具体来说,是通过定性综合集成到定性、定
量相结合综合集成再到从定性到定量综合集成这
样三个步骤来实现的。这个过程不是截然分开,
而是循环往复、逐次逼近的。
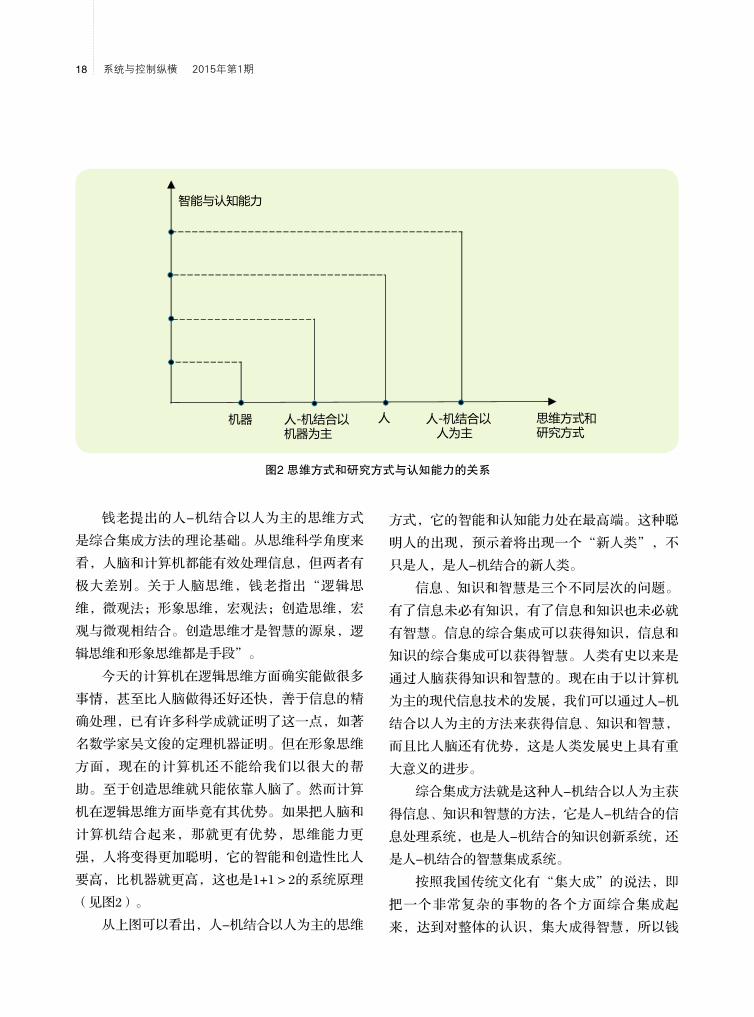
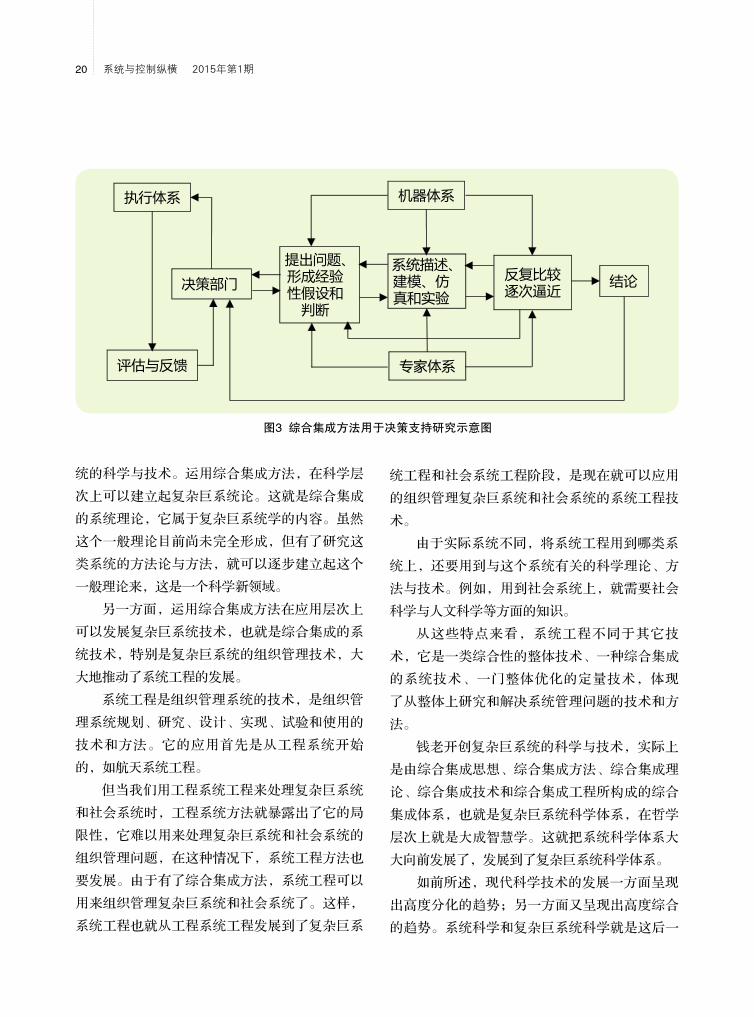
复杂系统与复杂巨系统(包括社会系统)问
题,通常是非结构化问题,现在的计算机只能处
理结构化问题。通过上述综合集成过程可以看
出,在逐次逼近过程中,综合集成方法实际上是
用结构化序列去逼近非结构化问题。图3是综合集
成方法用于决策支持问题研究的示意图。
这套方法是处理复杂系统和复杂巨系统(包
括社会系统)的有效方法,已有成功的案例证明
了它的科学性和有效性。
综合集成方法的理论基础是思维科学,方法
基础是系统科学与数学科学,技术基础是以计算
机为主的现代信息技术和网络技术,哲学基础是
辩证唯物主义的实践论和认识论。
从方法论和方法的特点来看,综合集成方法
本质上是用来处理跨学科、跨领域和跨层次问题
研究的方法论和方法,它必将对系统科学体系不
同层次产生重要影响,从而推动系统科学的整体
发展。
20世纪90年代中期,钱老提出开创复杂巨系
系统与控制纵横 2015年第1期20
统的科学与技术。运用综合集成方法,在科学层
次上可以建立起复杂巨系统论。这就是综合集成
的系统理论,它属于复杂巨系统学的内容。虽然
这个一般理论目前尚未完全形成,但有了研究这
类系统的方法论与方法,就可以逐步建立起这个
一般理论来,这是一个科学新领域。
另一方面,运用综合集成方法在应用层次上
可以发展复杂巨系统技术,也就是综合集成的系
统技术,特别是复杂巨系统的组织管理技术,大
大地推动了系统工程的发展。
系统工程是组织管理系统的技术,是组织管
理系统规划、研究、设计、实现、试验和使用的
技术和方法。它的应用首先是从工程系统开始
的,如航天系统工程。
但当我们用工程系统工程来处理复杂巨系统
和社会系统时,工程系统方法就暴露出了它的局
限性,它难以用来处理复杂巨系统和社会系统的
组织管理问题,在这种情况下,系统工程方法也
要发展。由于有了综合集成方法,系统工程可以
用来组织管理复杂巨系统和社会系统了。这样,
系统工程也就从工程系统工程发展到了复杂巨系
统工程和社会系统工程阶段,是现在就可以应用
的组织管理复杂巨系统和社会系统的系统工程技
术。
由于实际系统不同,将系统工程用到哪类系
统上,还要用到与这个系统有关的科学理论、方
法与技术。例如,用到社会系统上,就需要社会
科学与人文科学等方面的知识。
从这些特点来看,系统工程不同于其它技
术,它是一类综合性的整体技术、一种综合集成
的系统技术、一门整体优化的定量技术,体现
了从整体上研究和解决系统管理问题的技术和方
法。
钱老开创复杂巨系统的科学与技术,实际上
是由综合集成思想、综合集成方法、综合集成理
论、综合集成技术和综合集成工程所构成的综合
集成体系,也就是复杂巨系统科学体系,在哲学
层次上就是大成智慧学。这就把系统科学体系大
大向前发展了,发展到了复杂巨系统科学体系。
如前所述,现代科学技术的发展一方面呈现
出高度分化的趋势;另一方面又呈现出高度综合
的趋势。系统科学和复杂巨系统科学就是这后一
图3 综合集成方法用于决策支持研究示意图
决策部门 结论提出问题、形成经验性假设和
判断
执行体系
评估与反馈
系统描述、建模、仿真和实验
机器体系
专家体系
反复比较逐次逼近
2015 No.1 All About Systems and Control 21
发展趋势中最具有基础性和应用性的学问,是人
类的宝贵知识财富和思想财富。它对现代科学技
术发展,特别对现代科学技术向综合集成的整体
化方向发展,必将产生重大影响,将成为一门21
世纪的科学。这是钱学森对现代科学技术发展的
重大贡献。
钱学森系统科学思想和系统科学体系,不仅
有重要的科学价值,还有重要的实践意义和现实
意义。
从实践论观点来看,任何社会实践,特别是
复杂的社会实践,都有明确的目的性和组织性,
并有高度的综合性、系统性和动态性。社会实践
通常包括三个重要组成部分:
一是实践对象,就是干什么,能不能干,它
体现了实践的目的性;
二是实践主体,是由谁来干和怎么干,它体
现了实践的组织性;
三是决策主体,它最终要决定干不干、如何
干的问题。
从系统科学观点来看,任何一项社会实践,
都是一个具体的实践系统,正如钱老所说“任何
一种社会活动都会形成一个系统”。实践对象是
个系统,实践主体也是系统且人在其中,把两者
结合起来还是个系统。因此,社会实践是系统的
实践,也是系统的工程。这样一来,有关社会实
践或工程的组织管理与决策问题,也就成为系统
的组织管理和决策问题。在这种情况下,系统科
学思想、理论方法与技术应用到社会实践或工程
的组织管理与决策之中,不仅是自然的,也是必
然的。这就是为什么系统工程和系统科学具有广
泛的应用性以及系统科学思想指导性的原因。
但在现实中,真正从系统角度去考虑和处理
社会实践和工程问题并用系统工程去解决问题,
还远没有深入到各行各业的实践之中,特别是一
些重大工程实践就更为突出。人们在遇到涉及的
因素多、复杂且难于处理的社会实践或工程问题
时,往往脱口而出的一句话就是:这是系统工程
问题。这句话是对的,其实它隐含两层含义:一
层含义是从实践或工程角度来看,如上所述,这
是系统的实践或系统的工程;另一层含义是从科
学技术角度来看,既然是系统的工程或实践,它
的组织管理就应该用系统工程技术去处理,因为
系统工程就是直接用来组织管理系统的技术。
可惜的是,人们往往只注意到了前者,相对
于没有系统观点的实践来说,这也是个进步,但
却忽视或不了解要用系统工程技术去解决问题。
结果就造成了什么都是系统工程,但又没有用系
统工程去解决问题的局面。有些重大工程虽然也
凑合过去了,但却付出了不应有的代价。
1978年,钱学森、许国志、王寿云发表了
“组织管理的技术——系统工程”一文,并大力
推动系统工程在各个领域的应用,特别是致力于
把社会系统工程应用到国家宏观层次上的组织管
理,以促进决策科学化、民主化和组织管理现代
化。
现代科学技术体系(自然科学、社会科学、
数学科学、系统科学等)为国家管理和建设提供
了宝贵的知识资源和智慧源泉,我们应充分运用
和挖掘这些知识和智慧,以集大成得智慧。而系
统科学中的综合集成方法和大成智慧工程又为我
们提供了有效的科学方法和有力的技术手段,以
实现综合集成,大成智慧。这就是钱学森把系统
科学特别是复杂巨系统科学和社会系统工程技术
运用到国家宏观层次组织管理的科学技术基础。
法国科学家安培在1845年发表了《论科学的
哲学》一篇长文,曾给关于国务管理的科学取了
一个名字——控制论(Cybernetics),试图建立
一门政治科学,但并没有实现。

系统与控制纵横 2015年第1期22
【作者简介】 于景元,中国航天系统科学与工程研究
院研究员、博士生导师。曾任710所(中国航天系统科
学与工程研究院前身)副所长、科技委主任。
图4 1955年钱学森携家人踏上回国路
钱老说:“20世纪50年代,我还没有回到
祖国的时候,发现了这篇东西,我和我在学校工
作的同事笑话他。他说,政府管理的学问,恐怕
不能建立像自然科学那样严密的科学。我那时
想,像你们美国政府,那些政客们、官僚们,都
是不说真话的,讲的是一套,干的又是一套。你
们那些政客都是骗人的。骗人的东西,怎能建立
科学呢?科学是老老实实的学问,骗人的科学是
没有的。所以,当时我笑他。安培的设想是很高
尚的,可惜是空的。但安培的理想在社会主义国
家,尤其是在我们社会主义的中国是可以实现
的。这是因为我们是讲科学的,是不搞鬼的”。
钱老关于国家管理和建设的系统科学思想、
理论方法与技术以及实践方式,要比安培的理想
深刻得多也丰富得多,而且紧密结合我国国情,
具有重要的现实意义。
今年是钱学森归国60周年,作者谨以此文纪
念这位科学大师和伟大的爱国主义者!
2015 No.1 All About Systems and Control 23
*本文转载自毛剑琴、林德伟主编的《纪
念林士谔先生百年诞辰文集》(北京航空
航天大学出版社,2013年)
纪念我的导师林士谔先生*
一、第一次聆听
我第一次见到林士谔先生是在1960年他讲“陀螺稳定系统”
的课堂上。当时我是北京大学的青年教师。在“大跃进”的号召
下,北京大学在原有学科设置的基础上进行了很大的扩展。我所
在的数学力学系的一般力学专业也增加了陀螺惯导等新的方向,
因此教师力量突显不足,1960年5月系里从我们五七级力学系的
三个班里挑选了包括我在内的六名学生承担一般力学专业教师的
工作,其中有两名学生(包括我)当时就提前毕业转成了教师身
份。据说当时在北大有200多名“提前毕业”的学生。为了给本
专业的学生开新课,教研室派我去北京航空学院旁听“陀螺仪稳
定系统”、“惯性导航”等课。据说当时国内只北航有这一类课
和成熟的教材。这就使我有机会听到林先生讲课。
那是1960年秋,在北航二号楼的大阶梯教室里,座无虚席,
约有200多名学生听课,我因是旁听坐在后排。林士谔教授讲课
时穿一件深灰色的中山装,他声音洪亮,对讲的内容熟悉,很少
看讲稿,板书整齐,讲的节奏适当,学生来得及记笔记,又不松
懈,所以课堂鸦雀无声,吸引着学生的注意力,并让学生对老师
讲的内容深信无疑。我也深深地被林先生讲课的内容吸引着,没
想到在理论力学中学过的柯莱奥利力在陀螺仪中有如此巧妙的应
用,从而对飞机的稳定控制起到重要作用,我必须感谢林先生在
这方面对我的启蒙。后来又了解到我们在代数课里讲到的解高阶
多项式根的“林氏方法”便是林士谔先生提出的,对他又多了几
分敬意。
从北航听课回来后,我在北大一般力学专业也开了“陀螺仪
稳定系统”的专业课。当时用的教材是林先生及其团队编的科学
出版社出版的《陀螺仪理论及其应用译文集》(1960)、北京科
学教育出版社出版的《陀螺仪原理及应用》(1961)、《陀螺稳
毛剑琴 北京航空航天大学
著名自动控制学家林士谔
科学人物
系统与控制纵横 2015年第1期24
定系统及导航系统》(1961)等。这些教材对我
们在北大新学科方向的建设帮助很大。
二、师从林先生
1962年我国对国民经济实行“调整、巩固、
充实、提高”的八字方针,我们这一批提前毕业
的学生又被要求返回原来的专业补完未修的课
程,与班里的同学一起毕业。我于1964年从北大
数学力学系一般力学专业毕业,按当时系里的安
排,我可以回到一般力学教研室继续当教师。但
由于听过北航的专业课,我一直有一种把所学的
知识用于航空航天事业的愿望,于是萌生了考北
航研究生的想法。不知是否因为保密的原因,在
那年研究生的招生简章中,并没找到北航相关专
业的招生名额。在指导我毕业论文的陈滨老师陪
同下,我来到林士谔先生的家里。当时林先生住
在北航2住宅一层。1964年春天,那是我第一次面
见林先生,并得知北航当年陀螺惯性导航专业有
一名招收研究生的名额,导师是林士谔。我决定
放弃北大工作的机会准备考研。后来才知道当时
报名考林先生那个名额的共有八人,七名男生加
上我一名女生。考试的结果是我数学100分,俄语
98分,专业课成绩也挺不错,八个人中考了第一
名,于是我顺利地成为了林先生的64级研究生。
我知道,这是得益于北大严格的基础知识教育和
训练。
1964年9月我入学北京航空学院的研究生班。
当时,全校各系的研究生编成一个班称为64级研
究生班,班里共有24名学生,23名男生只有我一
人是女生。记得当时沈元校长接见我们时讲,
“培养研究生就是培养为国家攀登科学高峰的登
山队员”。导师林先生根据我的理科背景安排
我补学工科的基础课,从电工原理补起,并要求
我到当时的第四研究室的实验室去学习和参加实
验。虽然英语曾是我的第二外语,还是要求我作
为第一外语,从发音和基本语法学起,体现了
林先生对学生基础课教育和理论联系工程实际
教育的重视。这些知识对我以后的工作起到了很
重要的作用。比如英语,虽然我上的小学,中西
小学,是上海知名的教会学校,使我较早地接触
了英语,后来中学和大学里也都学过英语,但发
音的矫正和系统的语法是在研究生的一年课程里
学的。以致我出国后,英国人曾问我“你的英语
在哪里学的?语音很正”。头几批派往英国的中
国访问学者和留学生被要求先在英语学校学两个
月。在英国的英语学校里我的语法也总是考100多
分。这应该感谢林先生对我基础课方面的严格要
求。还有在工程基础课方面的学习,使我在科研
中重视了工程实际提出的问题。在用我理科的优
势解决这些问题后,又重视由工程实际来检验研
究得出的结果。现在我在研究生教学中也是这样
来教育和要求学生的,这也应该感谢林先生。作
为导师,他教给我不仅要向学生传授学问,还要
传授做学问的态度,即理论联系实际的态度,也
就是一种唯真求实的科学精神。
三、文革后助学生“回炉”和出国
1966年夏,在我入学研究生不到两年之际全
国开展了那场持续十年的“文化大革命”浩劫。
研究生制度作为修正主义制度被废除,研究生被
认为是修正主义的苗子。64级研究生被迫停课于
1968年“被毕业”,陆续离校。我最终被分配到
核工业部参加了核武器的研究工作。在“文革”
中林士谔先生受到了很大的冲击,先是作为“反
动学术权威”被打倒,后又因其父亲为北伐战争
立功而获得的一枚国民党金质勋章被打成“反革
命分子”。造反派打破了他的头,拖着他在操场
上游斗,抄了他的家,把他从2住宅的家里赶到东
南小院的使用公共厕所的简陋平房里住。他的身
体和精神遭受了极大的磨难,他的夫人和孩子也
2015 No.1 All About Systems and Control 25
受到了严重的连累。
1968-1978年我和林先生的联系也就此中断了
10年。虽然离开了北航,但我还是不时地关注着
他的情况。我心里为这样的一位才华横溢,卓有
贡献的科学家和教育家受到如此不公正的待遇感
到痛心。每每想起那段时间林先生的遭遇心里总
不能平静。所以,把那段回忆封存起来,轻易不
敢去触碰。
“四人帮”被打倒后,国家恢复了研究生制
度,并恢复了研究生招生。国家政策允许64、65
级研究生“回炉”。“回炉”的意思是考虑到这
两级研究生当时因“文革”没有读完就离校了,
若本人愿意,则可以回校继续学习,修完全部课
程包括完成毕业论文。开始时我因经过十年,已
是人到中年,上有老、下有小,并没有想到要
“回炉”。但有一天,在五道口外文书店买书时
遇到了林先生团队中的崔中兴老师,他告诉我经
过十年浩劫,北航被严重破坏,亟待整顿恢复,
希望我这样的人回校。以后林士谔先生又托人转
告了他的住址,让我去看他,也转达了要我回校
的恳切希望。1977年秋,当我走进北航东南小院
林先生简陋的家,看到了林先生夫妇俩,竟不知
话从哪儿说起。经过“文革”的摧残,俩人的身
体都不好了,林先生得了高血压和哮喘,林师母
身体也显得很弱。林先生没有花时间回忆这十年
是如何走过的,他直截了当地表示要我“回炉”
到北航完成研究生学业。从谈话中感觉到他对于
“文革”后的新时期充满期待和信心,他那“重
振山河”的热情也感染了我。之后,我又去看了
几次林先生,记得有一次还给他送了一兜儿活螃
蟹,他很高兴。在林先生的动员下,我决定“回
炉”。当时规定“回炉”也是要经过考试的,而
那时离考试的时间只有一个月了。我除了上班,
利用一切可用的时间,天天开夜车,准备六门考
试的课程,直到有一天累得晕了过去。当时是林
先生那种“重整专业”的决心和信心给了我很
大的力量。这是我第二次考研,这次只知道有不
少人考,当然名额也不止一个,最后考试的结果
是我考了第二名。林先生很高兴我能回来,那是
1978年的秋天。
然而,我的研究生历程注定是如此的不平
坦,刚刚开学没几个月,国家出台了派留学生出
国的政策。建国以来,虽然也派过多批次留学生
出国,但大多是去苏联、东欧等国。当时人们并
不了解西方,并不认为出国到西方有多么好,反
而存在不少疑虑。国家实行在全国进行统一英语
考试,按成绩选拔出国预备人员。当我征求林先
生的意见时,林先生是积极支持的。他给我讲了
他当时出国的故事,他在麻省理工学院用了当时
最先进的也是最早的一台模拟机“MIT微分分析
器”完成了博士论文的故事说明有必要出去看
看,学习先进的知识。在林先生的鼓励下,我参
加了全国英语考试,通过了。1979年7月至1981年
9月我被派往英国帝国理工学院进修。出国前林
先生给了我他在英国的亲戚的地址、姓名,要我
有困难去找他们,并给他们写了信,要他们照顾
我。我感到林先生在尽力帮助我。
在英国的两年多,除了在业务上的收获外,
我们作为中国改革开放后第一批来到西方世界的
中国学者对西方有了较全面的了解,也使西方人
对中国人有了新的认识,确确实实增进了中国和
各国的友好关系。我在英国的老师,英国皇家学
会会员David Mayne教授是一位国际知名的自动控
制理论学者,他尽可能创造机会让我接触到国际
自动控制界的知名学者,参加各种学术讨论会,
推荐我上多种专业课程,替我考虑哪些是我回国
后有用的应该学,甚至连我回国后做什么方向的
研究都提出了具体的建议。我切身感受到出国进
系统与控制纵横 2015年第1期26
修对一个学者提高科研和教学能力有多么重要。
由于我在进修期间的工作令英国老师们满
意,David Mayne找我谈:如果我愿意,可以在两
年工作的基础上再做一年研究便可获得帝国理工
学院的博士学位。我知道这是一个求之不得的好
机会。然而,显然这将会彻底改变我的人生。因
为在英国,帝国理工学院的控制专业是在国际上
享有声誉的,这样的一个博士学位,在英国找一
份工作是不难的,在英国生活下去是没问题的,
可是我的一家老小怎么办?我对林先生和学校的
承诺怎么办?等等。这一切引起了我激烈的思想
矛盾。在各种影响我回国的因素中,林先生1939
年一完成博士论文就放弃当时可留在美国工作的
机会,立刻回国投入抗战一事,对我起了作用。
经过两个月的激烈思想斗争,我决定放弃留在英
国帝国理工学院继续攻读博士学位的机会,按时
回到北航从事科研和教学,那时我也无意争取任
何学位了。
然而,意想不到的是1981年秋,我刚回国,
国家关于启动学位制度的政策颁布了。林先生对
我说,你做了两次研究生却没得到任何学位,以
后的研究生都有学位了,何况你在英国只差一年
就可以完成博士学位,为何不在国内把学位完成
呢。他明确建议我做新中国自己培养的第一批博
士,而且还是由他做指导教师。他还从我的实际
情况出发,建议我做在职的博士生。曾获帝国理
工学院博士学位的沈元校长也找我面谈,希望我
攻读北航的第一批博士学位,在他们的鼓励下,
我又登上了中国博士研究生的征途。也就是我第
三次的研究生征途。
四、导师的导师,动人的故事
新中国的第一批博士生培养,由于承担着开
路,为以后的博士生培养做样板的责任,故在管
理上宁严勿松。所以并不是像我想象的补上一年
哪怕是两年足够了。我被要求先通过所有的硕士
生课程的考试,并先完成硕士论文。才能进入博
士阶段,虽然我只用一年时间,在1982年完成了
硕士论文,但还被要求通过全部的博士生入学考
试,完成全部的博士生课程的学分才能进入博士
论文阶段,一步也不能省略。这样一来,光政治
课我就考了好几遍,还有俄语变成了第二外语也
又考了一遍等等。那个时候我的压力特别大,除
了要开两门新课,承担科研项目,发表论文等以
外,家里母亲病重,孩子上中学需要的后勤保
障、辅导等再加上攻读博士的各项要求,真恨不
得每一分钟当好几分钟用,我陷入了空前的困
境。和在英国“只需一年”相比,觉得中国的博
士何其难做,常常后悔没在英国做,几次在向林
先生汇报工作时流露出不想继续读的想法。林先
生听了没说什么,首先要我冷静下来,然后给我
讲他在MIT用两年完成博士论文的故事。详细地
讲了“林氏方法”是怎样提出的,他说他当时没
想过要提什么方法,只是在研究飞机控制稳定性
时需解微分方程,后化为求多项式根的问题。但
是找不到现成的方法解高阶多项式的根,他只好
自己想办法。发现用计算尺试凑几次后,先求出
两个根,把多项式降阶,逐次做下去,求出全部
根,这就是劈因子求解法,开始是求实根,后又
解决求复根问题,以后又将试凑法系统化、公式
化,就成为一种方法。当时只是为做论文所用。
1939年论文答辩后,他即离美归国抱着航空
救国的理想投入抗战。他的导师Draper教授很赏
识他所提出的解高阶多项式根的方法,曾让他在
MIT的有关领域内做过报告。钱学森先生在MIT
是林先生的同学,据访问过钱先生的同事讲钱
先生听过他的报告,还说“林氏方法”对他很有
用。林先生告诉我在他回国后,Draper教授将他
的方法整理成论文以林士谔的名义发表在MIT的
2015 No.1 All About Systems and Control 27
《数学与物理》杂志 。Draper教授在自己的著作
中将该方法命名为“林氏方法”。我被林先生讲
的故事深深地吸引住了。林先生的导师是一位多
么值得尊敬的具有崇高科学道德的学者!现实中
我所知道的是学生写文章署上老师的名字,而这
位外国教授指导中国留学生完成了博士论文,将
论文中的创新成果帮学生写成学术论文、用学生
的名义将该成果公布于世,并用中国人的名字命
名该成果,可以说这是那个年代唯一的一个用中
国人名字命名的方法。要知道那时的时间坐标是
1939年,中华民族正处于被日本帝国主义侵略的
深重灾难之中,是一个华人在世界上受尽歧视欺
辱的年代。
多 么 令 人 羡 慕 的 清 澈 透 明 的 “ 纯 学 术 境
界”,多么值得向往的高耸入云的“学术道德”
巅峰!这种科学道德精神之高尚用什么美好的词
汇来形容都不会过分。MIT一直是我心目中向往
的学校,我虽然没机会去MIT做学位,但从林先
生给我讲的故事里感受到了那里美好的也正是我
向往的学术环境,在这样的环境中还用发愁培养
不出“杰出人才”吗?当下人们议论的“钱学森
之问”的答案不是显然的吗?
爱因斯坦曾说过“许多人都以为是才智造就
了科学家,他们错了,是品格”。这位有高尚品
格的Draper教授就验证了这一点。Draper教授后来
成为了国际陀螺惯导领域的著名学者。他与一些
学生和技术人员成立的麻省理工学院仪表实验室
也就是林士谔先生曾工作过的地方。在二战期间
研制出高精度的瞄准镜,战后,在美国军事领域
中的多种导弹都用了他们研制的导航系统。1961
年后他又为美国的宇航事业研制出许多高度创新
的装置,成功地用于阿波罗的领航等,1973年,
该实验室独立于MIT,被命名为Draper实验室。
五、一心培养一名博士
我感谢林士谔先生在我做博士论文的关键时
刻给我上了生动的一课。给我树立了做人、做
事、做学问的标准。不想继续做的想法消失殆
尽。我也体会到林先生作为导师,他会尽力帮我
创造好的学术环境。
航空工程中还有多少问题用得着我所学的数
学力学理论去解决和提高,我按照林先生的指
导,向在实验室工作的老师学习,向讲课的老师
学习,以选择博士论文的题目。老师们都给予了
热情的帮助。在学习中,我了解到用在导弹等飞
行器上的捷联式惯性导航系统中的捷联矩阵是关
系到导航精度的关键,该矩阵是由导航计算机算
出的,由于舍入误差等原因必须即时进行修正,
以保证矩阵的正交性,否则就会产生导航误差。
而当时常用的即时修正方法是迭代法。
我想起在英国时David Mayne给我们讲过奇异
值分解,这种分解由于70年代后才有算法得以在
计算机上实现,深得当时控制界专家们的关注,
不少人正在设法将其用来解决控制中有待解决的
问题。由于奇异值分解最大的特点是将一个变换
的转动部分和拉伸部分分离开来,而矩阵的正交
化正是仅需要转动变换。我预感到这种分解可用
来代替迭代法,一次性求出捷联矩阵,如果可
行,这种方法既简单又精确,而且完全可用计算
机实现。
向林先生汇报后,他鼓励我在这个方向上做
下去,并通过教研室负责人,我的副导师王振钧
教授,帮助联系使用当时系里最好的从东欧进口
的计算机Nova-4,进行计算。大量的计算表明我
的预感是正确的。在此基础上,进一步要回答为
什么这么做是正确的,这种方法的误差又是如何
估计。于是证明了若干个有关的定理,发表于国
内外知名刊物,这便成为我论文的第一部分创新
系统与控制纵横 2015年第1期28
点,以后又提出将奇异值分解用于导航系统能控
能观性的数值判断方法和相应的定理以及将奇异
值分解用于最优输出反馈控制等。林先生对我的
论文进展顺利很高兴,最后我们将我的博士论文
的题目定为“奇异值分解理论研究及其在控制与
导航中的应用”。
时间过得很快,已经是1985年的秋天,从通
过博士生考试算起已有三年时间,研究生院同意
可以进行答辩。因为那时规定不满三年是不允许
答辩的。国内第一批博士答辩什么都很新鲜,而
且很多和国外不一样。若在英国,他们一般是请
3-4位有名望的教授来进行评阅和答辩。而当时我
的博士论文却找了全国各单位40多位教授专家作
为评阅人,答辩委员会也有多位教授参加。林先
生在定答辩委员会主任时提名他在MIT的校友张钟
俊。当时我并不认识张钟俊教授,但知道他是我
国控制界的著名学者、上海交大的教授。不巧的
是张先生那段时间感冒了,不便来京,他给林先
生推荐了他的学生,当时任武汉大学研究生院院
长的陈珽教授代替他当答辩委员会主任,并强调
他虽不能参加,但一定要替他投一赞成票。
1985年的9月29日上午9点我的博士论文答辩
在当时的6号楼三系会议室进行,由陈珽教授主
持。林士谔先生穿了一身深灰色的中山装严肃地
坐在第二排。从他的神情看得出来,这对他是一
件重要的事情。答辩顺利通过,评价也挺高,林
先生十分高兴。
从我1964年开始读研究生到1985年完成博士
论文答辩有21年的时间,也就是说我应该在1967
年完成的工作推迟了18年才完成。答辩完成后一
些媒体宣传我属于新中国培养的第一批女博士,
其实这个“第一”迟来了18年。也就是说我应该
在27岁完成的事到了45岁才完成。一次,清华大
学的卢强院士在听完我的故事后说:“你走了一
条最难走的路”。他说的太对了,这条路确实
难,因为这条路遭遇了我国几个令人难忘的历史
时期,见证了我国研究生制度和学位制度曲折发
展和进步的历程。按现在的学制,一个人从小学
到硕士生毕业也只需18年,而我却用18年考了三
次研究生才做完了博士学位。然而,我毕竟完成
了这件事,应该说我和林士谔先生一起终于完成
了这件事。这21年中林士谔先生作为我的导师,
除了“文革”十年和出国两年外,他一直在指导
着我,陪伴着我走完了漫长的研究生征途。他不
仅向我传授了知识,更重要的是向我传授了科学
精神,即科研和教育工作者应具备的那种执着、
那种锲而不舍的做人、做事、做学问的品格。
需要说明的是,在林先生的指导下,我的博
士论文中的创新成果发表于国内外一级刊物,被
SCI的文章引用,并被国际“数学评论”摘录转
载。1988年我去美国St. Louis的华盛顿大学讲学
时,一位洛克希德航空公司的工程师觉得捷联矩
阵即时修正的方法对他很有用,向我要去了发表
的文章。后因他工作的保密性,不好问他用上没
有。我在美国St. Babara大学访问时,控制领域中
研究奇异值分解的知名学者A.Laub也对我把奇异
值分解用于矩阵正交化的算法很感兴趣,说对他
们正在进行的项目有用。我想林先生在天之灵知
道他所指导的博士论文的创新成果在国外的反响
后会感到欣慰的。
六、美丽鲜红的落日
在我做博士论文的四年中,林先生的身体不
断衰老。曾几次跟我说要快一点儿,否则他赶不
上了,并说他完成我一个人的博士培养就很知足
了。我当时没把他说的话当一回事,因为我觉得
林先生的身体状态还不错,所以一直想和他照一
个工作照的事也没有抓紧,总想还有的是时间。
但没想到1987年初他住院了,他住在校医
2015 No.1 All About Systems and Control 29
院。我去看他,带了一兜儿梨。
——说到梨我想起了一次批斗林士谔的会,
那是在1967年秋冬,造反派组织了一次去郊区农
村的劳动,并将林先生也带去了。那次我也去
了。林先生因长期患有支气管哮喘,痰多,所以
随身带了几个梨,在劳动休息时吃了。于是造反
派立刻将此作为“反革命分子的新罪行”在回来
的火车上召开了批斗会。在那“史无前例”的
“革命”年代,林士谔先生连吃一个梨的权利都
被剥夺了!
在医院里,林先生见了我和带去的梨很高
兴,并告诉我说他身体没什么事,只是因为他家
刚搬到学校新盖的33楼,暖气不热,而那年春天
又很冷,他就想到校医院躲躲冷,看来他还很得
意自己的这一主意。我听了也就放心了,并说过
几天再去看他。但是万万没想到这是我和老师的
最后一次见面交谈。
很快,听说他在医院里拉肚子了,后来又说
并发了什么病,最后转到了中日友好医院。我给
林先生家里打电话问怎样去探视病人,他们说医
生谢绝探视。几个月后,林先生的家人给我来电
说可以探视了,我错以为林先生的病情好转了,
就安排先去外地出差,回来再去医院看林先生。
但没想到当我回到北京第二天,9月26日的下午
我骑车到中日友好医院见到林先生时,他躺在一
个玻璃房里,我不能靠近,只见仪器上显示他的
心跳的波形。护士告诉我,家属刚来告别过了,
现在除了还有心跳,没有其它生命迹象。对我来
说,这简直是如雷轰顶,是一个完全不能接受的
事实。我晕晕乎乎地不知该做点儿什么好,只是
远远地看着林先生,真想问问他为什么走得这么
急,不等等我来看他。 我想多陪林先生呆一会
儿。不知过了多久,可能有一个小时左右,护士
说心跳停止了。仪器上显示只有一条直线的那一
刻是下午6点。我想到我应该马上做一件事,那
就是立刻将这一消息告诉系领导。于是我给当时
的系主任王占林老师和副系主任裘丽华老师打电
话,等他们赶到后我才放心地回家了。
在骑车回家沿着三环路朝西走时,我还是有
点儿晕晕乎乎。但记得很清楚的是当我抬头看
时,发现有一轮大大的圆圆的血红的落日挂在我
正前方的天空上,那落日之圆之大,那落日颜色
之鲜红,那落日离我之近,是我一生中见到的唯
一的一次,我一直向着这轮美丽的落日骑到了北
太平庄。就是现在,每当我想起这件事,闭上眼
睛还能清楚地显现此情景。此情此景给我留下了
太多的想象空间,有时我想是不是林先生因为临
终前没能和我说上话,而在喻示我什么……我的
导师就这样走了,从此我失去了一位知我者、导
我者,从此我们的国家失去了一位世界闻名的卓
越的科学家和教育家。
从1960年我第一次听林先生讲课到1987年他
去世,有27年之久,从1964年我第一次当他的研
究生算起有23年之久。而至今我还无法找到合适
的语言来描述这种失落这种无法填补的悲痛。
七、我国航空自动控制学科和陀螺惯导学科的奠基人
林士谔先生在北航校庆三十周年时,曾题词
“爱我中华,志在航天”。我觉得这是对他自己
一生最好的概括。林先生作为中国早期的“海
归”,他的爱国精神主要体现在“留学的目的是
为了报国”,他仅仅用了两年就完成了博士论
文,据他讲他是那批公派留学生中较早取得博士
学位的。在灾难深重的中国和优越的生活和工作
条件的美国之间,他毫不犹豫地选择了回国,抱
着航空救国的理想回国后便参军投入了航空仪表
研制中。抗战胜利后,林先生在1946年夏天赴厦
门大学任航空系主任和教授,开始从事航空教育

系统与控制纵横 2015年第1期30
事业。
林士谔先生是一位有真才实学的大科学家,
他在科研中的创新精神是我们的楷模。“林氏
方法”的诞生充分说明了他善于从实际中提出
问题,敢于锲而不舍钻研。他的创新完全是一个
科研工作者“唯真求实”探索的结果,不参杂任
何名利的杂念。他不是为名利去创新,取得成果
后,也不去争名利。他是在一种“纯学术境界”
中创新的,他是一位纯粹的科学家。只有这样的
创新才是在科学上有价值的。
“林氏方法”于1941年、1943年和1947年发
表于麻省理工学院的《数学与物理》杂志上。
该 方 法 不 仅 比 美 国 航 空 顾 问 委 员 会 技 术 报 告
(NACA·TR/1914~1915年)论述过的各种解
根法简便,而且比1939年英国教授贝尔斯特(L.
Bairstew)在他的著作《应用航空动力学》中介
绍的解根法简捷。当时即得到美国学术界广泛的
重视和应用。1952年Draper教授等所著的《仪表
工程学》第二卷中详细论述和评价了“林氏方
法”。
虽然林士谔先生首创“林氏方法”时的研究
背景是飞机的纵向和侧向运动控制的稳定性分
析,实际上他解决的是高阶多项式求解的数学问
题。工科的学者知道这类问题在工程中十分常
见。故“林氏方法”从五十年代起先后编入我国
的“计算方法”和“数学手册”内。国外出版的
“自动控制理论”、“惯性导航”、“仪表工
程学”等专著内也引用了“林氏方法”。例如,
1952年Draper教授等所著《仪表工程学》第二卷
的421-429页详细论述了如何将“林氏方法”用
2015 No.1 All About Systems and Control 31
于Routh-Hurwitz稳定性判据来判断控制系统的稳
定性。1976年美国D·S·理格士的著作《Control
theory and physiological feedback mechanisms》,
苏联H·T·库卓夫 柯夫1960年发表的《频率
自动控制理论》,1965年美国J·H·Blakelock
的著作《飞机和导弹的自动控制》,1979年美
国德州仪器公司出版的电机工程软件说明书 TI
Programmable 58/59,37-39页,用“Lin-Bairstew
Method”(林-Bairstew方法)编写解算21阶多项
式的根值等。据很不完全的检索1950-1989年期间
至少有27篇SCI论文中引用了“林氏方法”,这些
论文的作者中不乏国际知名的学者。值得一提的
是,在我主编的北航、南航、西工大三院校研究
生统编教材中讲述了“林士谔-贝尔斯特方法”,
遗憾的是这本书是1988年出版的,那时林先生已
经去世,我只能以此作为对他的一种怀念了。
林士谔先生从未满足于他最初提出的“林氏
方法”,他一直在研究如何改进“林氏方法”,
使其更少地依赖使用者的经验、使得计算过程更
简捷、使其更便于工程应用。林先生1963年在
《数学进展》6卷3期中综述了“林氏方法”并在
参考文献中列出数十篇有关的论著。可以说林先
生的一生都在研究“林氏方法”的改进和应用。
他谦虚地听取团队中青年教师们对“林氏方法”
使用中的意见,给以耐心的讲解。直至1980年及
1981年,他还在《航空学报》、《力学学报》发
表了“林氏方法”的改进和应用,并阐述了“根
轨迹分析法近似解K值”的理论,受到国内外的重
视。这是一个科学家对做学问的高度负责任的态
度,是他身上的那种对科学问题锲而不舍、无穷
逼近真理的科学精神的表现。
林先生还是我国第一个膜盒式真空速表的发
明和制造人。该仪表在苏式战斗机上进行了试
飞,苏联飞行员试飞数据证明,比国外后来使用
的真空速表性能要好、发明要早。林先生为此获
当时航空委员会颁发的“光华发明奖”。早在
1937年,林先生在麻省理工学院参加了无线电高
度表的研制和测试工作,并在硕士论文中撰写了
“驻波理论”以解释无线电高度表的地面测试现
象,对该仪表的设计原理做出了贡献。由此看出
林先生这种从工程实际中发现问题将其中的理论
问题提炼出来,经过理论的研究解决问题后,再
应用到解决工程实际问题中的科学研究方法贯彻
了他的整个科学人生,使得他的创新具有重要的
科学意义和应用价值,也使得他不断地获得新的
创新灵感和动力。
林士谔先生长期从事航空自动控制及航空仪
表学的教学与科研工作。为建立飞行控制与导航
新专业,他先后编写、讲授了《航空仪表学》、
《自动器元件》、《飞机设备》、《自动驾驶
仪》、《陀螺稳定系统》、《惯性导航》、《动
力调谐陀螺仪理论》等教材与课程。他还翻译了
《飞机仪表学》、《航空电机电器学》、《飞机
设备》等教科书,并和其他同志合作,主编了
《陀螺仪应用理论译文集》两集,《动力调谐陀
螺译文集》三集。还编写了《惯性导论》(高等
教育出版社出版,1962年),《动力调谐陀螺
仪》(国防工业出版社出版,1983年)。此外,
他还发表了有关飞机自动控制理论,陀螺及惯性
导航和航空仪表方面的论文十余篇(《北京航空
学院学报》),并完成了《具有大气温度修正装
置的气压式高度表的设计与试飞》(《中国科
学》,英文版,1958年7卷1期)等论文。1969年
他和陀螺研究室三位科研人员,参加和设计了地
质仪表厂研制的石油勘探装置中的陀螺稳定平
台,完成了石油勘探任务并通过鉴定,投入小批
生产。在他长期领导下的北航陀螺研究室研制的
液浮陀螺和动力调谐陀螺移植至有关的研究所和

系统与控制纵横 2015年第1期32
工厂,得到了应用。
上世纪五十年代末到六十年代初, 林先生
领导陀螺研究室成功研制了国内第一个液浮陀螺
和动力调谐陀螺,并进行了相应的基础理论研
究。他和他的团队翻译和编著了大量有关著作和
教材,推动了我国新型陀螺仪表的研制和应用。
为他所领导过的研究室后来在光纤、激光等陀螺
仪、GPS/惯性、天文/惯性组合导航系统和捷联惯
导系统等方面及时跟踪国外高技术的发展奠定了
基础。
林士谔先生继1939年MIT的博士论文《飞机
的自动控制理论》之后,在1946-1951年任厦门
大学航空系主任和教授期间一直从事“飞机控制
后之稳定性”研究,同时开设了“航空仪器及设
备”、“空气动力学”、“空气动力设计”等课
程。1952年,调北京成为组建北京航空学院的八
位奠基人之一。故林士谔先生不仅是我校也是我
国航空自动控制学科和陀螺惯导学科的奠基人。
八、大写的人,永生的精神
最后,还需要讲到,林士谔先生有过美好的
爱情和一个美满的家庭。林先生和他的夫人一
起曾给我讲过他们的爱情故事。林先生出国前
在广州认识了刘莲娜女士,并产生了爱慕之心。
他们约定一旦林先生得到博士学位后便回国完
婚。刘女士在广东等他四年之久,直到1939年他
们完婚。之后,林先生先后到成都、厦门、北京
工作,林师母始终伴随着他,并生有二男一女,
组成了幸福的家庭。十年“文革”浩劫期间,受
到林先生的牵连,林师母的身心都遭到严重的摧
残。在艰苦的环境中两人始终相伴,共度难关。
我从英国回来后他们已经搬到10 住宅去了,但由
于“文革”期间造反派不止一次地抄家,他们的
家里不再是“文革”前那样的优雅了。林先生原
来的那张白色欧式铁床没有了,搬回来后,他的
床是原来的长沙发两头接了两条长板凳上面铺一
块床板搭成的。我说这样不结实,他说没关系,
可以睡觉。由于暖气不热,在客厅的中央装了一
个煤炉,长长的烟囱通到窗外,还不时地添加煤
块,弄得煤灰飞扬,这对患有支气管哮喘的林先
生是很不利的。对这些,从未听林先生有怨言。
有时听他开玩笑似的说,我们俩身体都不好了,
想到谁先走,谁后走的事。他说她先走还好些,
要是我先走的话她怎么办呢?不幸的是,正被林
先生说中了,林先生去世后,过年过节时我去看
林师母,她看起来身体很弱,天气很热时还穿着
棉裤,视力也很弱了。有一次打电话不通了,我
去看怎么回事,她说电话机拆了,为了省电话
费。我发现电视机也没有了,她说卖了。我这才
体会到林先生的担心是有道理的。
林先生为人低调,从不争自己的利益。他
月薪300元,在新中国刚成立时,是相当高的工
资。但多年来一直未加过薪,直至1986年退休。
到1987年去世时,他的工资已不算高了。林师母
曾在系里做过绘图员,困难时期响应号召离职回
家,从此没有公费医疗等福利。林先生去世后,
70多岁的林师母除每月35元的补贴外主要靠亲戚
救济和子女赡养,看病成了她最担心的事。我总
感到每次过年过节送的水果和钱对她帮助有限。
1989年,听说当时的航空航天部可以报科研成果
奖并有奖金。我就将我的博士论文中的创新成果
以我和林士谔、王振钧的名义报了奖。说实话,
我当时报奖的目的主要是为了得奖金好帮助林师
母。1990年,“奇异值理论研究及其在控制与
导航中的应用”获得了航空航天部科技进步二
等奖,得奖金2000元。我一领到奖金就分成了三
份,给林师母送去了700元。这是我获得的第一个
奖,以后我又获得过多个奖项,奖金的数目都记
不清了。但唯一记得很清楚的是这第一个奖金的
2015 No.1 All About Systems and Control 33
【作者简介】 毛剑琴,1940年5月出生于上海,祖籍浙
江余姚。工学博士、教授、博导。专业:控制理论与控制
工程。1957-1964年,北京大学数学力学系毕业(其中
1960-1962年在该系任教两年);1964-1968年,北京
航空航天大学研究生毕业;1968-1978年在北京第九研
究所从事核武研究;1979-1981年英国伦敦大学帝国理
工学院访问学者;回国后在北京航空航天大学任教,并在
职攻读学位。1982年获硕士学位,1985年获工学博士学
位;1981年、1986年、1991年、1992年分别被聘为北京
航空航天大学讲师、副教授、教授和博士生导师;1991-
1995年任本校宇航学院副院长。曾受聘任中南大学兼职教
授。1988-1989 、1992 、1999年分别受聘为美国、比利
时、新加坡访问教授;曾多次应邀赴美、英、比、日、新
加坡、香港等多个国家和地区讲学20余次。她是IET(原
IEE)会士(Fellow)和注册工程师;IEEE高级会员。曾
任IEEE北京分会主席。受命于中国自动化学会,她创建了
IEEE控制系统分会(中国)并任多届主席。曾任中国自动化
学会副秘书长、常务理事、理事,现为该学会荣誉理事;
曾任中国人工智能学会常务理事、《信息与电子工程》学
报编委及中国科协女科技工作者协会常务理事。
她的研究方向是:复杂系统的智能化建模与控制,智
能结构的建模与控制,迟滞非线性系统的建模与控制的理
论及应用,鲁棒与最优控制理论及应用等。
由她主持的项目曾获国家发明一等奖一项;部级科
技进步二等奖六项;IEEE控制系统协会奖一项;发表学术
论文220余篇、著作两部:《控制系统计算机辅助设计》
(1988年,北航出版社)、《智能结构动力学与控制》
(2013年,科学出版社)、译著两部:《线性系统理论与
设计》(陈启宗著,1988年,科学出版社)、《鲁棒与
最优控制》(周克敏著,2002年,国防出版社,2006年
再版);主编书两部:《纪念林士谔先生百年诞辰文集》
(2013年,北航出版社)、《新中国著名建筑师毛梓尧》
(2014年,城市出版社)。
数目。记得当时林师母收到这笔钱后立刻藏好,
生怕弄丢。听林师母讲他们家的第三代孩子都很
争气,有的考上了北大,有的出国学习。看来上
天还是公平的,林先生在天之灵若有知也会感到
欣慰的。林师母于2000年3月26日在北京家中去
世。
林先生尽管在“文革”中遭受不公正的待
遇,甚至是精神和肉体的摧残,却从未减少他报
国的热情,一旦条件允许他便全身心地投入,用
自己的知识为国家的航空航天做科研和培养人
才。他用坦荡的胸怀消化了个人的委屈,团结了
自己的团队。我和林先生很少说起“文革”,不
提起这方面的事情,怕引起他不愉快的回忆。只
记得他不止一次地说到:因为受他的牵连,“文
革”中他的几个孩子都未能上大学,有的甚至连
中学都没上好,他为这事感到内疚和遗憾。在国
家和个人,个人和家庭的关系中,我领略了林先
生的大家风范、爱国情结。
在我的导师林士谔先生百年诞辰之际,我想
起林先生“士谔”的名字(“千人之诺诺,不如
一士之谔谔”出自《史记·商君列传》),他没
有辜负父辈的期望,一生践行着敢为人先、着力
创新的科学精神。我想起诗人臧克家的诗“有
的人死了,他还活着”。林士谔先生他“还活
着”:因为他发明的“林氏方法”一直在被人们
使用;因为他崇高的科学道德和科学创新精神还
在作为我们的榜样一代代传承下去;因为他与祖
国同患难的爱国精神还在作为民族脊梁的标杆激
励着我们;因为作为科学家和教育家他那“唯真
求实”的基因已经传承给他的学生并将一代代传
承下去。
我们的国家和民族应该记住我们曾经有林士
谔先生这样一位做出过重大贡献的、有着高尚品
格的、世界知名的卓越科学家和教育家。

系统与控制纵横 2015年第1期34
科学人物
李训经*
雍炯敏 美国中佛州大学数学系
张旭 四川大学数学学院
李训经教授1935年6月13日出生于山东莱西县。1956年7月本科
毕业于山东大学数学系,同年考取复旦大学数学系函数论专业副博
士研究生,师从著名数学家陈建功先生,学习函数逼近论。1959年
1月研究生毕业,留复旦大学数学系任助教。1962年晋升为讲师,
1980年和1984年分别晋升为副教授和教授,1985年被国务院学位委
员会批准为博士生导师,1997年荣任复旦大学首席教授,2001年退
休。2003年2月,因病去世,享年68岁。
李训经教授是我国控制科学及相关领域的先驱者、开拓者和推
动者之一,在无限维系统最优控制和随机系统最优控制理论等方面
的科学研究中做出过重要的成果,在人才培养方面更是成绩卓著,
培养了一支在国际上有影响的学术队伍。
一、初试锋芒
李训经出生于山东省青岛市莱西县的一个普通家庭。他排行老
李训经
李训经(1935-2003),山东莱西人。应用数学家,控制科学家,专长于微分方程及数学控制理
论。1956年山东大学数学系本科毕业,1959年复旦大学数学系函数论专业研究生毕业。1959年1月
起在复旦大学工作,历任助教、讲师、副教授、教授、首席教授。他曾任中国工业与应用数学学会
常务理事,中国工业与应用数学学会系统与控制数学专业委员会主任,中国自动化学会控制理论专
业委员会委员,中国控制会议关肇直奖评奖委员会委员,《控制理论与应用》(中文版及英文版)
等若干学术刊物的编委。他还被聘为浙江大学、东北师范大学、青岛海洋大学、上海财经大学等高
校的兼职教授。他曾先后到美国、日本、法国、英国、德国、意大利、加拿大、澳大利亚、韩国等
国家进行学术访问。李训经教授是我国常微分方程和控制科学领域的先驱者之一,是我国数学金融
学研究的积极倡导和推动者。他在无限维系统最优控制和随机系统最优控制理论等方面有过重要的
贡献,共发表论文70余篇,出版专著1本,教材4本,编辑国际学术会议论文集2本。他于1977年获
“上海市重大科学技术优秀成果奖”,1985年获国家教委“科技进步二等奖”,1989年获国家“自
然科学四等奖”,1999年获上海市“科技进步一等奖”。李训经教授在人才培养方面做出了突出的
贡献,培养了一支有国际影响的学术队伍,2001年荣获“上海市优秀教育工作者”称号。
*本文转载自《20世纪中国知名科学家
成就概览数学卷第三分册》(科学出版
社,北京,2012年,pp. 324-333)
2015 No.1 All About Systems and Control 35
大,下面有两个弟弟和五个妹妹。全家靠父亲一
人工作的收入度日,家境贫寒。1942年3月李训经
在莱阳县某小学启蒙。1946年全家搬迁到青岛,
李训经就读青岛市莱阳中学。1949年,他考入青
岛第一中学读高中。
1952年9月,刚满17岁不久的李训经考进了山
东大学数学系(山东大学当时在青岛市,后来于
1958年搬迁至济南)。创建于1901年的山东大学
历史悠久。早在20世纪50年代,该所大学的学科
已经非常齐全,且在国内享有很高的声誉。从小
就热爱数学的李训经在这里如鱼得水,在数学的
海洋中流连忘返。
当年高校的学习环境还是相当艰苦的。入学
后的第一个冬天,青岛的天气特别寒冷。李训经
和其他十几个同学住在文学馆的三楼,没有暖
气,连墨水瓶内都结冰。李训经的棉被相当单
薄,上身穿的棉袄也很薄。不过人们常常看到他
穿着一件紫红球衣,清晨高高兴兴地参加诸如跑
步、做广播操一类的体育锻炼。夏天来了,同学
们常常看到李训经晚自习回到寝室后赶紧洗汗背
心,以便第二天可以穿这唯一的背心。
李训经个头不高,体育技能较差,有时由于
若干体育项目动作不标准,招来其他同学的取
笑。不过他从不计较这些,仍然坚持参加体育课
和锻炼小组的活动。最终通过他坚韧不拔的努
力,较早达到了当年作为合格大学毕业生必须达
到的高校“劳卫制”各项体育锻炼标准要求。
在学习上,李训经是全班公认最出色的。在
课堂里,他总是如饥似渴地听讲,专心致志地记
笔记。他的笔记本是课后同学们最乐意借阅参考
的。他非常乐意帮助学习有困难的同学。他几乎
是他所在学习小组的辅导老师。由于李训经在各
个方面的出色表现,他曾被选为当时山东大学的
校学生会主席。
早在大学生时代,李训经就已经不仅仅满足
于考试成绩优秀,而是在当时数学系老师的指导
下开始初步的科学研究。他在本科生阶段就发表
了两篇论文:《周期系数二阶线性微分方程的稳
定性》和《四点共圆与双线性变换的不变圆》。
尽管这种大学生水平的习作的学术意义还不大,
但科学研究的种子尤其是探索未知世界的原动力
无疑已深深地植入了李训经的心中。有趣的是,
李训经在大学生时代的选题似乎已初步显现出他
的学术品味,以及他后来学术生涯的端倪。当年
对常微分方程稳定性的研究也许是他日后主要从
事控制科学研究的兴趣源头之一。
1956年来到了,李训经面临大学毕业。以他
的实力留在山东大学数学系任教是不存在问题
的。但是,当时的数学系主任鉴于李训经的才
学,觉得他应该继续深造,并建议李训经报考陈
建功教授的研究生。
1956年9月,李训经考取复旦大学数学系函数
论专业副博士研究生,师从著名数学家陈建功,
学习函数逼近论。复旦大学创建于1905年,是中
国少数几所有国际声誉的名校之一。“复旦”
二字由该校创始人马相伯先生选定,出自《尚书
大传·虞夏传》中“日月光华,旦复旦兮”的名
句,意在自强不息。自1952年全国高校院系调整
起,由于苏步青和陈建功等名家的加盟,复旦大
学数学系师资力量十分雄厚,成为我国数学研究
和教育的中心之一。李训经的导师陈建功先生
(1893-1971)是我国近代数学的奠基人之一,
1955年被选为中国科学院数理学部学部委员。
李训经在研究生阶段主要研究级数的Cesàro
求和法及其在复变函数逼近论中的应用。他在这
方面的主要工作“解析函数用它的法巴级数的
蔡查罗平均数来匀迫”和“蔡查罗求和法在巴拿
赫空间”分别发表在1960年的《复旦大学学报》
系统与控制纵横 2015年第1期36
和《数学学报》上。值得指出的是,在那个“极
左”的年代,往国外投寄文章几乎可等同于里通
外国。因此,将最好的工作投到《数学学报》是
那个时代国内绝大多数数学家的首选,由此可以
想象当时的研究生要在那里发文章是多么的困
难。据悉,这些结果发表多年后还有论著引用。
研究生阶段的数学训练使李训经终身受益。直到
晚年,李训经对他的同事和学生提及恩师陈建功
时,其感激之情仍溢于言表。
1959年1月,李训经研究生毕业后留在复旦大
学数学系工作。由于复旦大学数学系学科发展的
需要,李训经开始跟随金福临教授从事常微分方
程的教学和研究工作,并于1962年出版了合著教
材《常微分方程》(这本教材于1984年再版,被
许多高校选为教学用书或参考书)。几乎与此同
时,他开始涉足控制理论领域,并在金福临主持
的讨论班上学习大数学家列夫·庞特里亚金(Lev
S. Pontryagin)等人的经典著作《最佳过程的数
学理论》(俄文版)。李训经还参与了该书的中
文翻译校对,并且在绝对稳定性和快速最佳控制
等方面做了一些工作。他的有关工作“时滞系统
的绝对稳定性”和“线性系统的快速控制”(与
谢惠民合作)分别发表在1963年的《数学学报》
和1964年的《复旦大学学报》上。这些工作是对
当时蓬勃发展的现代控制理论的有益补充。事实
上,在20世纪50-60年代,线性系统的时间最优
控制问题是一个非常活跃的领域。在“线性系统
的快速控制”一文中,李训经等利用向量值测度
证明:就有限维线性控制系统而言,其能达集在
控制函数取值于任意有界闭集时必是凸的,并给
出一般形式下最优时间的计算公式。这些结果,
即使今天看来,仍然有相当的价值。
正当李训经和他的同事们准备在控制理论这
一新的数学分支里大显身手的时候,中国开始了
“文化大革命”。
二、动乱岁月
“文化大革命”期间,教学和科研受到极
大的冲击。整整十年,理论研究几乎完全陷于

2015 No.1 All About Systems and Control 37
停顿。不过,李训经在这段动乱岁月中并没有做
“逍遥派”。他响应“理论联系实际”的号召,
开始了工业应用数学方面的科研工作。1966年至
1967年,李训经带领团队在上海炼油厂搞反馈软
件,使其进一步加深了对工程控制论的理解。
1970年代,李训经带领学生和同事们在上海炼油
厂、金山石油化工厂、上海矽钢片厂、上海第十
玻璃瓶厂、上海味精厂等单位深入实际,从实际
问题中研究控制理论应用,以典型课题带动教
学。1979年初在宝山钢铁公司举办《宝钢数学模
型班》,消化日本设备的有关技术,为宝钢培养
了大批骨干人才。20世纪70年代末,李训经还到
浙江衢州化工厂,为石油化工部办短期培训班,
推广上海炼油厂的一套经验。李训经还曾与当年
浙江大学工程控制论方面的著名学者吕勇哉合作
搞常压蒸馏塔自动控制,融合不同的学科,带领
具有不同背景的人员一起开展理论研究和技术革
新。李训经主持完成的“常压蒸馏航空煤油质量
控制的数学模型”项目获得1977年“上海市重大
科学技术优秀成果奖”。该项目是我国自行研制
的用于大工业生产控制的第一个数学模型。
这段经历对李训经在动乱结束后重新从事创
造性研究工作、恢复学术青春、特别是升华他的
学术品位发挥了一定的作用。他经常对他的学生
或同事们说,好的数学往往能解释物理学家或工
程师们认为是正确的现象。所以他特别强调,应
用数学研究要讲清背景,不能“无病呻吟”。其
实,历史上截至19世纪末,一个有成就的数学家
往往在应用方面也有相当的造诣。那时的数学家
除了数学的抽象世界之外,他们的脑海中还有一
个充满了各种自然现象的真实世界。大家知道,
为了解释观察到的大量天体运行的资料,解释天
体运行的基本规律(开普勒三大定律),牛顿建
立起天体运行的数学模型,提出了划时代的三大
力学定律和万有引力定律。但是,力学定律的内
涵超越了那个时代传统数学的范围,牛顿不得不
开拓新的领域,发明了微积分,然后再用微积
分、力学定律和万有引力,求得了行星运行的规
律。可以说,牛顿同时是现代纯粹数学和应用数
学的鼻祖。
三、艰难起步
1976年深秋,持续十年的“文化大革命”终
于结束了。这场浩劫全面拉开了中国同世界主要
国家在经济、文化特别是科学技术等各个方面的
巨大差距。然而,没有哪一次巨大的历史灾难不
是以历史的进步为补偿的。人心思定,大乱后必
大治!
“文化大革命”结束时,李训经已年逾四
旬。孔子曰:“四十而不惑”。可是,数学界的
普遍看法是,对绝大多数数学家而言年过四十岁
则意味着从事创造性数学工作的黄金年龄已经过
去。不过,人有少年得志也有大器晚成,机缘时
运不同而已。天道酬勤,上天会眷顾每一个努力
上进的人,命运也会垂青那些永不放弃的人们。
1977年恢复高考,高等学校的科研和教学重
新兴旺起来。面临十年停顿带来的落后,当时还
是讲师的李训经思考新的科研起点。首先,他仍
然觉得最优控制理论是他的长项和兴趣所在;然
而,通过查阅文献,他发现有限维系统最优控制
理论已经比较完善,要作出有意义的创新成果,
必须选择新的方向。根据自己的特点,他选择了
无限维系统最优控制问题的研究作为出发点。
今天回过头来看,李训经当年的选择的确是
审时度势、深思熟虑的。下面从控制论的发展历
史来反思一下他的正确选择。熟知,控制论是由
杰出的数学家诺伯特·维纳(Norbert Wiener)
在20世纪40年代创立的,被公认为是20世纪最伟
大的科学成就之一。控制论诞生后,得到了广泛
系统与控制纵横 2015年第1期38
的应用与迅猛的发展。20世纪40-50年代是古典
控制论时期。除维纳的经典工作外,这个时期的
代表性成果还有我国著名科学家钱学森创立的的
工程控制论。在20世纪50年代中期,迅速兴起的
空间技术的发展迫切要求建立新的控制理论,以
解决诸如把人造卫星用运载火箭以最少燃料或最
短时间准确地发射到预定轨道之类的控制问题。
这类控制问题十分复杂,采用古典控制论难以解
决。1958年,庞特里亚金提出了被称为最大值原
理的最优控制的新方法。在这之前,理查德·贝
尔曼(Richard Bellman)于1954年创立了动态规划
方法,并在1956年应用于控制过程。他们的研究
成果解决了空间技术中出现的复杂控制问题,并
开拓了控制理论中最优控制理论这一新的分支。
1960年,鲁道夫·卡尔曼(Rudolf E. Kalman)等
建立了Kalman滤波理论。这样,在20世纪60-70年
代,一套以状态空间方法为基础,用以分析和设
计控制系统的新的原理和方法已经确立,这标志
着现代控制理论的形成。遗憾的是,由于“文化
大革命”的原因,李训经错过了这段控制理论发
展的黄金时代。但现代控制理论的经典结果主要
是针对较为简单的确定性有限维系统。随着应用
背景的进一步扩大,人们迫切需要建立无限维系
统、随机系统等诸多更为复杂系统的控制理论。
自20世纪70年代以来,控制理论得到更为迅速的
发展,其中新结果、新方法和新思想层出不穷,
有如百舸争流。这样,传统意义下(有特定含
义)的现代控制理论已难以囊括控制理论的全貌
尤其是其这段时期的发展,所以,将后者称之为
现代控制科学,应该更为恰当些。正是在这样的
大环境下,李训经回到了他所钟爱的控制理论研
究。
机遇和挑战总是一对孪生兄弟。我们现在几
乎无法想象李训经当时重新回到科研工作上的困
难程度。那时,他年逾不惑,有繁重的教学任
务,没有名家指点,图书资料也极为匮乏,更没
有成型的学术团队。李训经只好带领当年还是助
教的姚允龙开始了无限维最优控制理论方面的探
索。1978年,他们首先对无限维线性系统的时间
最优控制问题的研究获得了突破。他们发现:一
般而言,无限维线性系统的能达集未必是凸的,
这与有限维情形有本质区别。同时,他们也证
明:尽管无限维线性系统的能达集本身未必是凸
的,但其闭包一定是凸的。由此,利用无限维空
间的凸集分离性定理,他们得到了无限维线性系
统时间最优控制的最大值原理。他们的文章发表
在《中国科学》上,引起了国内外同行的重视。
1981年,李训经参加了在日本京都召开的国际自
动控制联合会世界大会,并在一个分组会上报告
了该工作。同时,他还应邀担任了一个分组会议
的主席,这在当时改革开放初期是非常少见的。
1985年,李训经等在这方面的工作获得国家教委
“科技进步二等奖”。
在随后的几年中,李训经和姚允龙一起深入
研究了向量值测度在无限维最优控制理论中的应
用。他们的目的是证明一般半线性发展型无限维
系统具有终端约束的最优控制所满足的最大值原
理。在有限维情形中,庞特里亚金等人证明的最
大值原理只需要系数的可微性和终端约束集的凸
闭性。而在无限维情形,有反例表明,最大值原
理可能不成立。这样,寻求使得最大值原理成立
的条件就成为一个很有意义的问题。在深入的研
究中,李训经和姚允龙发现了一个非常重要的条
件:终端约束集的有限余维数条件。1985年,他
们证明:对于一般半线性发展型无限维系统,如
果终端约束集满足有限余维数条件,则最优控制
满足最大值原理。1989年,李训经等在这方面的
工作获“国家自然科学四等奖”。

2015 No.1 All About Systems and Control 39
四、复旦学派
谁说四十岁后的人就不能从事创造性的数学
工作?李训经不服气!到了20世纪90年代中后
期,他与同事和学生聊天时,常说前述的“四十
岁”应改为“六十岁”才更为恰当。李训经身上
的那种永不畏惧、永不妥协和永不服输的精神深
深地影响了他的同事和学生们。也正是由于这种
精神,他四十岁后在数学控制论方面的工作如井
喷一样爆发出来。他的事业恰似滚雪球,勇敢往
前推,愈推愈大。
数学控制论可分为有限维系统的控制理论、
无限维系统的控制理论和随机系统的控制理论三
大部分。在实际问题中,有限维系统往往只是无
限维系统一定程度上的近似。因此,从理论上
来说,无限维系统是更为真实的物理模型。就
应用角度而言,尽管工程上尤其是从计算机实现
的角度来看,近似模型的研究更有实际意义,但
对更为真实的模型的研究有助于给出合理的近似
模型,特别是从控制论的角度来看,有助于给出
合理的控制律。另一方面,几乎所有有实际意义
的随机控制系统也都是无限维控制系统。因此,
无限维控制系统理论是整个数学控制论的极为重
要的组成部分。如前所述,“文化大革命”结束
后,李训经很快开始了无限维控制系统理论的
研究,并在1985年与姚云龙一起对有终端约束
的无限维系统引入了有限余维数条件,证明了
最优控制的最大值原理。他们开创性的工作获
得了国际同行如美国加州大学洛杉矶分校数学
系H. O. Fattorini教授等的高度评价。1987年底,
师从数学控制论专家L. D. Berkovitz的雍炯敏从
美国回到复旦大学数学系工作,成为了李训经新
的合作伙伴和助手。1989年,李训经与雍炯敏合
作,利用Ekeland变分原理证明了一般半线性发
展型无限维系统具有终初端混合约束的最优控制
所满足的最大值原理,完善了适用于无限维控制
系统最大值原理证明的“针状变分技术”。基于
这个方法,后人相继给出了各种形式的无限维系
统最优控制的最大值原理。有限维最优控制理论
有三个公认的里程碑工作,即前面提到的庞特里
亚金、贝尔曼和查尔曼等人的工作。李训经和他
的合作者的工作主要围绕的就是这三个里程碑工
作之一的庞特里亚金最大值原理在无限维空间的
表现形式。1995年,李训经与雍炯敏合作在美国
的Birkhauser出版社出版了专著《Optimal Control
Theory for Infinite Dimensional Systems》,在国内
外控制理论界产生了相当的影响。该书从上述三
个里程碑工作的高度比较完整地总结了到当时为
止的非线性确定性无限维系统最优控制理论的最
新成果,其中许多工作是复旦大学控制理论研究
群体自己的工作,被H. O. Fattorini在英国剑桥大
学出版社出版的“数学及其应用百科全书”之一
的《Infinite Dimensional Optimization and Control
Theory》中公开誉为“复旦学派”的工作。1999
年,李训经和他的合作者在这方面的工作获上海
市科技进步一等奖。
值得指出的是,H. O. Fattorini评价的仅仅是
“复旦学派”工作的一部分。事实上,“复旦学
派”的工作还包含更为精彩的内容:随机控制理
论、随机微分方程和数学金融学等方面的系列工
作。在这些方面,李训经是先驱者、倡导者、组
织者和推动者。
我们生活的世界充满了不确定因素,要完全
准确地预测未来是不可能的,即所谓“天有不测
风云”。牛顿和拉普拉斯的机械决定论一般只适
用于宏观世界中的理想情形,而对于微观领域
以及客观世界中大量存在的偶然现象的研究就
产生了统计决定论。这样,从控制论的角度来
看,研究随机系统控制理论具有基本的、重要的
系统与控制纵横 2015年第1期40
科学意义和实际价值。随机系统是指含有内部随
机参数、外部随机干扰和观测噪声等随机变量的
系统。一般地,对其中的随机变量,人们只能了
解它的某些统计特性。随机系统是不确定性系统
的一种,其不确定性是由随机性引起的。严格地
说,任何实际的系统都含有随机因素,只是在很
多情况下可以忽略这些因素。当这些因素不能忽
略时,按确定性控制理论设计的控制系统的行为
就会偏离预定的设计要求,有时甚至可能“差之
毫厘,失之千里”。飞机或导弹在飞行中遇到的
阵风,在空间环境中卫星姿态和轨道测量系统中
的测量噪声,各种“利好”或“利空”消息对股
票市场的影响,生产过程中的种种随机波动等,
都是随机干扰和随机变量的典型例子。随机控制
系统的应用很广,涉及航天、航空、航海、军
事、工业过程控制、金融衍生证券市场、经济模
型的控制,乃至生物医学等。
早在“文化大革命”结束时,李训经确定自
己的研究方向时已经将随机控制作为下一个涉足
的领域。只是由于那时无限维系统最优控制的研
究占据了他的主要精力以及当时其知识结构等因
素的限制而使他暂时无法全身心投入。不过,从
1982年下半年起,李训经就已经指导他的硕士
研究生马进和王银平学习和探索随机控制理论,
从而开始了复旦大学控制科学的随机控制研究方
向。从1984年下半年开始的为期一年的时间里,
李训经访问了美国的一些大学,包括布朗大学、
普渡大学、密歇根州立大学,以及法国国家信息
与自动化研究所(INRIA)。通过与国际同行的
交流,尤其是在与国际随机控制专家、布朗大学
的W. H. Fleming的切磋后,他深切地认识到复旦
大学应该加快发展随机控制研究方向。于是,回
国后他将首次在复旦大学招收的两位博士研究生
周迅宇和胡瑛的研究方向确定为随机最优控制。
从那时起,随机控制便成为李训经主持的讨论班
上的主要专题之一。当时,经常参加李训经讨论
班的除了上述两位博士研究生以外,还有复旦大
学讲授随机分析的徐家鹄副教授、硕士毕业留校
工作的马进,和执教于浙江大学数学系的陈叔平
博士。1988年起,从美国回到复旦大学工作的
雍炯敏博士和师从著名数学家、随机控制专家A.
Bensoussan和随机分析专家E. Pardoux的彭实戈博
士(他刚从法国来到复旦大学数学研究所跟随李
训经做博士后)也成了讨论班的主要参与者。
当年李训经的讨论班学术气氛很热烈,有两
个主攻方向:一是无穷维系统最优控制问题;一
是随机最优控制问题。对于无穷维最优控制问
题,最关心的是,在什么样的条件下,最大值原
理对半线性发展系统、半线性和拟线性偏微分方
程系统成立。而对于随机最优控制问题,最关心
的是如何建立允许扩散项退化并含控制且控制区
域未必凸的随机控制系统最大值原理。那是一个
硕果累累的年代,产生了一批令国际同行刮目相
看的研究成果。例如前述李训经与雍炯敏关于无
穷维控制系统的庞特里亚金最大值原理,雍炯敏
关于一般半线性和拟线性椭圆和抛物型方程最优
控制的最大值原理;彭实戈关于扩散项含控制时
的一般随机最大值原理,以及由此导出的倒向随
机微分方程的一般理论,推广的Feynman-Kac公
式,和后来的非线性数学期望等等;周迅宇关于
庞特里亚金最大值原理和动态规划方法之间的关
系;李训经和汤善健关于带跳的随机系统的最大
值原理;陈叔平、李训经和周迅宇关于随机线性
二次不定指标最优控制的理论;马进和雍炯敏以
及胡瑛和彭实戈关于正倒向随机微分方程的一般
理论,等等。
90年代初,Pardoux和彭实戈关于非线性倒
向随机微分方程的理论在数学金融学领域里产生
2015 No.1 All About Systems and Control 41
了远远意想不到的影响。随着国际上人们对金融
市场的日益关注,数学金融学越来越成为人们试
图探索的领域。作为一名成熟、不甘于故步自封
的数学家,李训经敏锐地感到数学金融学应该是
他的团队下一个进军的目标。于是他从1990年代
中期开始,在各种场合下向人们宣扬数学金融学
的重要性。他联合了另外七位数学家共同向国家
自然科学基金委员会建议“金融数学——金融工
程——金融管理”重大项目的立项。在他和他的
同事们的共同努力下,国家自然科学基金委员会
于1997年将此项目作为“九五重大项目”立项,
并组织了以彭实戈作为首席科学家的重大项目的
实施。从而实质性地推动了我国数学金融学的研
究。
五、桃李芬芳
李训经是一位严谨和严肃的学者,更是一名
杰出的数学教育家。他在教书育人方面做出了非
常突出的贡献,为国家培养了一批优秀人才,为
控制科学及相关领域带出了一支具有国际影响的
科研队伍。
在国内数学界和控制理论界,李训经素以严
格著称。他待人待己均严。对学生的严格使得他
有“杀手”之誉。在他组织的控制论讨论班上,
任何一个学生都别想蒙混过关!在国内有个说法
“没有不能毕业的博士(硕士)”。但在这样的
大环境下,李训经对他的硕士研究生、博士研究
生、甚至博士后,始终严格要求。如果不合格,
就不予毕业。他曾经解释过他这样做的原因:大
家都对时下无孔不入的假冒伪劣产品深恶痛绝,
他力争在他手下毕业的学生中没有假冒伪劣产
品!李训经自身对科学和科学事业则更为严谨,
在他的身上不难发现他对科学的忠诚和敬业精
神。在时下科学家职业化的今天,这些精神尤其
难能可贵!
李训经培养学生最大的特点是“授人以渔,
而不是授人以鱼”。他常常给学生和年轻同事建
议一些重要的研究方向,并将自己的关键想法毫
无保留地说出来。然而,他似乎从来没有具体出
过题目。李训经总是鼓励学生去开拓他自己并不
熟悉的研究领域,注重让学生自己选题和寻找有
意义的方向。他很形象地说:选题的关键是看这
个问题是“大N中的ε,还是ε中的大N”。他
告诫他的学生,不要满足于仅解决他人提出的问
题。他曾经毫不客气地说:“至少就应用数学而
言,只会做别人提出的公开问题的人是没有太大
出息的”。
李训经对周围年轻教师的关心和培养也倾注
了非常的心血。一方面他对年轻教师严格要求,
充分信任,把他们尽可能地推到科学研究和研究
生教学的第一线,促使他们快速成长。另一方
面,在必要的时候,他主动为年轻教师承担教学
任务,揽去行政事务,尽量为他们创造出国访问
的机会,以增强年轻教师自身的对外交流能力。
李训经不仅仅关心自己的研究生和身边的年
轻教师,他对本科生的培养也是真舍得花时间。
他倡导并亲自主持本科二年级学生的课外讨论
班,培养学生对数学的兴趣。另外,在年事已高
的情况下,仍然一丝不苟地修改本科控制理论的
基础教材,甚至在病重期间依然如故。
值得欣慰的是,将“桃李满天下”用在李训
经身上无疑是恰当的。除了前面提到的人以外,
还有许多在国内各种岗位上担当重任,发挥着
重要作用。直接接受过他的控制论讨论班熏陶
的学者中,如今有1位成为中国科学院院士并应
邀在2010年的国际数学家大会上做一小时大会
报告,有2位在该次会议上做45分钟邀请报告,
有1位在2014年的国际数学家大会上做45分钟邀
请报告,有5位曾先后应邀担任数学控制理论

系统与控制纵横 2015年第1期42
界的国际主要期刊《SIAM Journal on Control and
Optimization》的编委,有7位在欧美发达国家著
名大学做终身教授等等。随着时间的推移,有如
薪火相传,李训经的学术思想和精神将通过他的
学生,以及学生的学生进一步发扬光大。
六、李训经主要论著目录
[1] 蔡查罗求和法在巴拿赫空间,数学学报,
10 (1960), 41-54.
[2] 时滞系统的绝对稳定性,数学学报,13
(1963), 558-573.
[3] Time optimal control of distributed parameter
systems, Scientia Sinica, 24 (1981), 455-465 (with Y.
Yao).
[4] Maximum principle of distributed parameter
systems with time-lags, Lecture Notes in Control &
Inform., 75 (1985), 410-427 (with Y. Yao).
[5] Maximum principle of optimal periodic
control for functional differential systems, J. Optim.
Theory & Appl., 50 (1986), 421-429.
[6] N-person differential games governed by
infinite dimensional systems, J. Optim. Theory &
Appl., 50 (1986), 431-450.
[7] Maximum principle of optimal controls for
functional differential systems, J. Optim. Theory &
Appl., 54 (1987), 335-360 (with S. N. Chow).
[8] Necessary conditions for optimal control
of distributed parameter systems, SIAM J. Control
Optim., 29 (1991), 895-906 (with J. Yong).
[9] The effect of small time delays in the
feedback on boundary stabilization, Science in China,
Ser. A, 36 (1993), 1435-1443 (with K. Liu).
[10] A linear quadratic optimal control problem
with disturbances -an algebraic Riccati equation and
differential games approach, Appl. Math. Optim.,
30 (1994), 267-305 (with S. Chen, S. Peng, and J.
Yong).
[11] Necessary conditions for optimal control
of stochastic systems with random jumps, SIAM
J. Control Optim., 32 (1994), 1447-1475 (with S.
Tang).
[12] Optimal Control Theory for Infinite
Dimensional Systems, Birkhauser, Boston, 1995
(with J. Yong).
[13] General necessary conditions for partially
observed stochastic optimal controls, J. Appl. Prob.,
32 (1995), 1118-1137 (with S. Tang).
[14] Stochastic verification theorems with the
framework of viscosity solutions, SIAM J. Control
Optim., 35 (1997), 243-253 (with J. Yong and X. Y.
Zhou).
[15] Tracking control for nonlinear affine
systems, J. Math. Control & Inform., 14 (1997),
307-318 (with K. L. Teo and W. Q. Liu).
[16] Stochastic linear quadratic regulator with
indefinite control weight costs, SIAM J. Control
Optim., 36 (1998), 1685-1702 (with S. Chen and X.
Y. Zhou).
[17] Minimum period control problem for
infinite dimensional system, Chin. Ann. Math., 19B
(1998), 113-128 (with L. Pan).
[18] Synthesis of upper-triangle non-linear
systems with marginal unstable free dynamics using
styate-dependent saturation, Int. J. Control, 72
(1999), 1078-1086 (with W. Lin).
[19] A linear quadratic problem with unbounded
control in Hilbert spaces, Diff. Int. Eqs., 13 (2000),
529-566 (with H. Wu).
[20] Necessary conditions for optimal control

2015 No.1 All About Systems and Control 43
参考文献J. Ma and Y. You, A tribute in memory of Professor [1]
Xunjing Li on his seventinth birthday, Control Theory
and Related Topics (In Memory of Xunjing Li), S. Tang
and J. Yong, eds., World Sci. Publ., Hackensack, NJ,
2007, 3-8.
陈叔平,彭实戈,雍炯敏:前言,李训经数学论文[2]
选,复旦大学出版社,2003, i-iii.
H.O. Fattorini, Infinite Dimensional Optimization and [3]
Control Theory, Encyclopedia of Mathematics and its
Applications, vol. 62, Cambridge University Press,
Cambridge, 1999.
【作者简介】 雍炯敏,1982年毕业于复旦大学数学系,
1986年在美国普渡大学获得博士学位。1988年至2003
年任教于复旦大学。2003年起任教于美国中佛州大学。
2014年应邀在国际数学家大会做45分钟报告。
【作者简介】 张旭,1989年毕业于四川大学数学系,
1999年在复旦大学获运筹学与控制论专业博士学位。
1999年至今任教于四川大学,其间(2005年底至2012年
初)任中国科学院数学与系统科学研究院研究员。2010
年应邀在国际数学家大会做45分钟报告,2013年获国家
自然科学二等奖。
of elliptic systems, J. Austral. Math. Soc., Ser. B, 41
(2000), 542-567 (with H. Gao).

系统与控制纵横 2015年第1期44
话说指南车及其所应用的
不变性原理
万百五 西安交通大学 系统工程研究所
相传4000多年前黄帝与蚩尤大战时黄帝的军队在山中遇到了大雾,迷
失了方向。借助军师风伯设计的“指南车”(图1),军队走出大雾,大
败了蚩尤。这段传说出自晋朝惠帝(公元259-307年)时崔豹所著的《古
今注》。原文说:“黄帝与尤战于涿鹿之野,尤作大雾,军士皆迷,故作
指南车以示四方,遂擒尤而即帝位”。图2是画家李乃慰描绘这场大战的
作品,并有战车出现。
这里有几点值得注意:当时“车”有没有发明?后文将要讲到,指南
车的构造是基于车上的一个较复杂的齿轮系。那么什么时候发明了齿轮?
什么时候有可靠的有关“指南车”的记载?
图1 指南车复原模型图2 黄帝借助指南车战胜蚩尤
学科史林
2015 No.1 All About Systems and Control 45
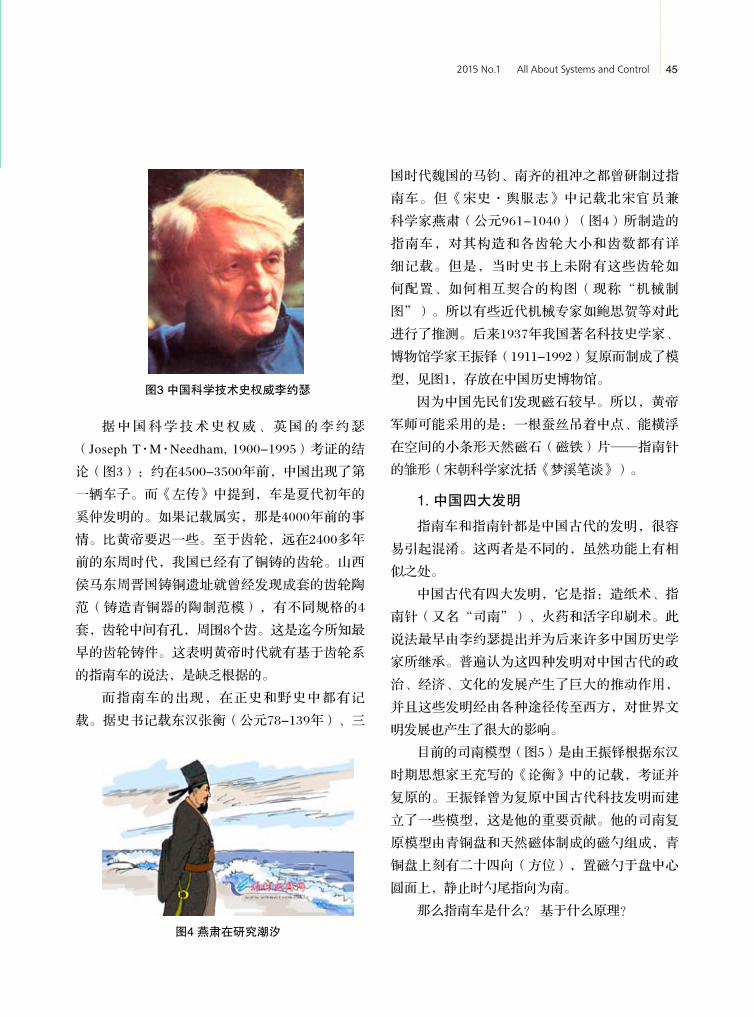
据 中 国 科 学 技 术 史 权 威 、 英 国 的 李 约 瑟
(Joseph T·M·Needham, 1900-1995)考证的结
论(图3):约在4500-3500年前,中国出现了第
一辆车子。而《左传》中提到,车是夏代初年的
奚仲发明的。如果记载属实,那是4000年前的事
情。比黄帝要迟一些。至于齿轮,远在2400多年
前的东周时代,我国已经有了铜铸的齿轮。山西
侯马东周晋国铸铜遗址就曾经发现成套的齿轮陶
范(铸造青铜器的陶制范模),有不同规格的4
套,齿轮中间有孔,周围8个齿。这是迄今所知最
早的齿轮铸件。这表明黄帝时代就有基于齿轮系
的指南车的说法,是缺乏根据的。
而指南车的出现,在正史和野史中都有记
载。据史书记载东汉张衡(公元78-139年)、三
国时代魏国的马钧、南齐的祖冲之都曾研制过指
南车。但《宋史·舆服志》中记载北宋官员兼
科学家燕肃(公元961-1040)(图4)所制造的
指南车,对其构造和各齿轮大小和齿数都有详
细记载。但是,当时史书上未附有这些齿轮如
何配置、如何相互契合的构图(现称“机械制
图”)。所以有些近代机械专家如鲍思贺等对此
进行了推测。后来1937年我国著名科技史学家、
博物馆学家王振铎(1911-1992)复原而制成了模
型,见图1,存放在中国历史博物馆。
因为中国先民们发现磁石较早。所以,黄帝
军师可能采用的是:一根蚕丝吊着中点、能横浮
在空间的小条形天然磁石(磁铁)片——指南针
的雏形(宋朝科学家沈括《梦溪笔谈》)。
1. 中国四大发明
指南车和指南针都是中国古代的发明,很容
易引起混淆。这两者是不同的,虽然功能上有相
似之处。
中国古代有四大发明,它是指:造纸术、指
南针(又名“司南”)、火药和活字印刷术。此
说法最早由李约瑟提出并为后来许多中国历史学
家所继承。普遍认为这四种发明对中国古代的政
治、经济、文化的发展产生了巨大的推动作用,
并且这些发明经由各种途径传至西方,对世界文
明发展也产生了很大的影响。
目前的司南模型(图5)是由王振铎根据东汉
时期思想家王充写的《论衡》中的记载,考证并
复原的。王振铎曾为复原中国古代科技发明而建
立了一些模型,这是他的重要贡献。他的司南复
原模型由青铜盘和天然磁体制成的磁勺组成,青
铜盘上刻有二十四向(方位),置磁勺于盘中心
圆面上,静止时勺尾指向为南。
那么指南车是什么? 基于什么原理?
图3 中国科学技术史权威李约瑟
图4 燕肃在研究潮汐
系统与控制纵横 2015年第1期46
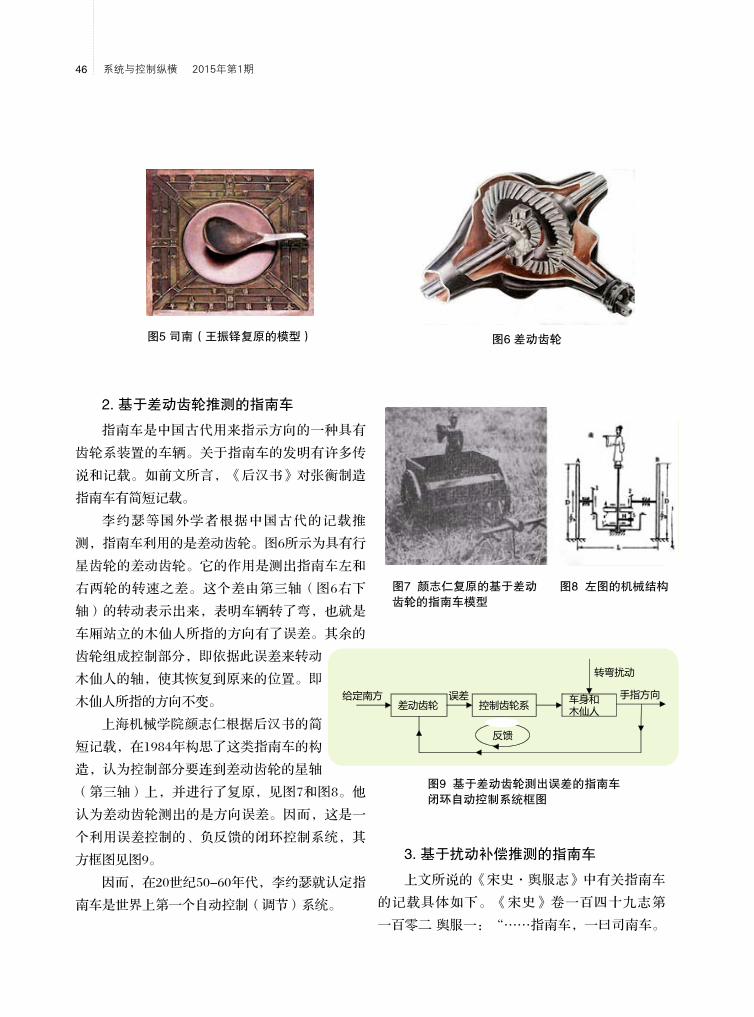
2. 基于差动齿轮推测的指南车
指南车是中国古代用来指示方向的一种具有
齿轮系装置的车辆。关于指南车的发明有许多传
说和记载。如前文所言,《后汉书》对张衡制造
指南车有简短记载。
李约瑟等国外学者根据中国古代的记载推
测,指南车利用的是差动齿轮。图6所示为具有行
星齿轮的差动齿轮。它的作用是测出指南车左和
右两轮的转速之差。这个差由第三轴(图6右下
轴)的转动表示出来,表明车辆转了弯,也就是
车厢站立的木仙人所指的方向有了误差。其余的
齿轮组成控制部分,即依据此误差来转动
木仙人的轴,使其恢复到原来的位置。即
木仙人所指的方向不变。
上海机械学院颜志仁根据后汉书的简
短记载,在1984年构思了这类指南车的构
造,认为控制部分要连到差动齿轮的星轴
(第三轴)上,并进行了复原,见图7和图8。他
认为差动齿轮测出的是方向误差。因而,这是一
个利用误差控制的、负反馈的闭环控制系统,其
方框图见图9。
因而,在20世纪50-60年代,李约瑟就认定指
南车是世界上第一个自动控制(调节)系统。
3. 基于扰动补偿推测的指南车
上文所说的《宋史·舆服志》中有关指南车
的记载具体如下。《宋史》卷一百四十九志第
一百零二 舆服一:“……指南车,一曰司南车。
图5 司南(王振铎复原的模型) 图6 差动齿轮
图7 颜志仁复原的基于差动齿轮的指南车模型
图8 左图的机械结构
图9 基于差动齿轮测出误差的指南车闭环自动控制系统框图
差动齿轮 控制齿轮系 车身和木仙人
给定南方 误差 手指方向
转弯扰动
反馈
2015 No.1 All About Systems and Control 47
赤质,两箱画青龙、白虎,四面画花鸟,重台,
勾阑,镂拱,四角垂香囊。上有仙人,车虽转而
手常南指。一辕。凤首,驾四马。驾士旧十八
人,太宗雍熙四年,增为三十人。……用独辕
车,车箱外笼上有重构,立木仙人于上,引臂南
指。用大小轮九,合齿一百二十。足轮二,高六
尺,围一丈八尺。附足立子轮二,径二尺四寸,
围七尺二寸,出齿各二十四,齿间相去三寸。辕
端横木下立小轮二,其径三寸,铁轴贯之。左小
平轮一,其径一尺二寸,出齿十二;右小平轮
一,其径一尺二寸,出齿十二。中心大平轮一,
其径四尺八寸,围一丈四尺四寸,出齿四十八,
齿间相去三寸。中立贯心轴一,高八尺,径三
寸。上刻木为仙人,其车行,木人指南。若折而
东,推辕右旋,附右足子轮顺转十二齿,击右小
平轮一匝,触中心大平轮左旋四分之一,转十二
齿,车东行,木人交而南指。若折而西,推辕左
旋,附左足子轮随轮顺转十二齿,击左小平轮一
匝,触中心大平轮右转四分之一,转十二齿,车
正西行,木人交而南指。若欲北行,或东,或
西,转亦如之。诏以其法下有司制之”。
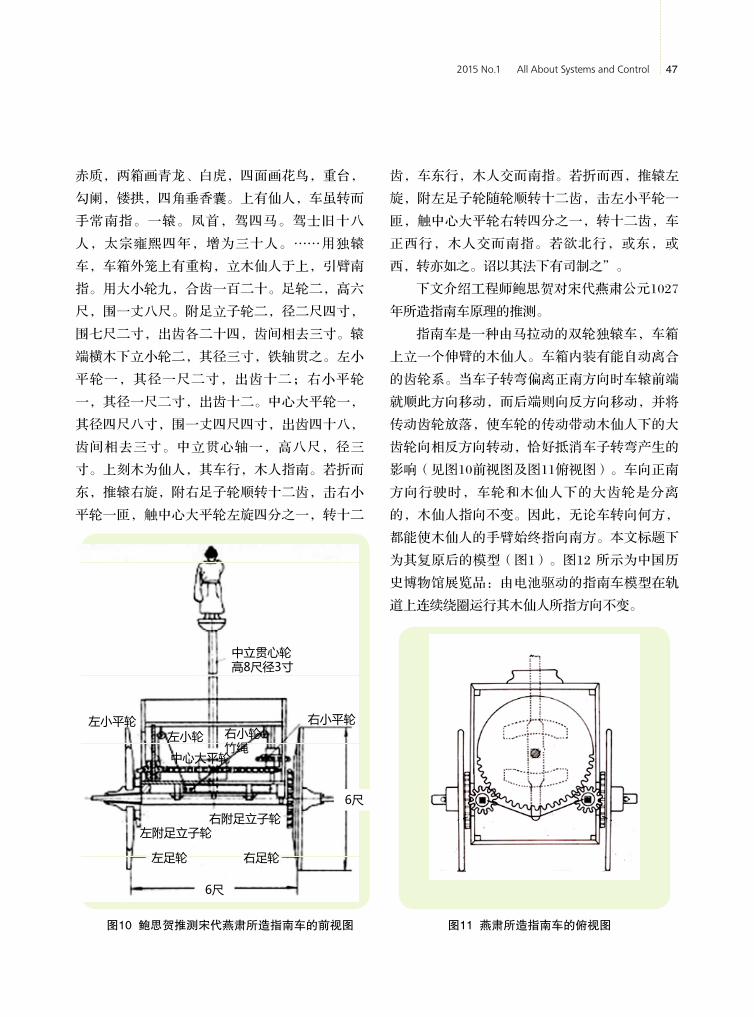
下文介绍工程师鲍思贺对宋代燕肃公元1027
年所造指南车原理的推测。
指南车是一种由马拉动的双轮独辕车,车箱
上立一个伸臂的木仙人。车箱内装有能自动离合
的齿轮系。当车子转弯偏离正南方向时车辕前端
就顺此方向移动,而后端则向反方向移动,并将
传动齿轮放落,使车轮的传动带动木仙人下的大
齿轮向相反方向转动,恰好抵消车子转弯产生的
影响(见图10前视图及图11俯视图)。车向正南
方向行驶时,车轮和木仙人下的大齿轮是分离
的,木仙人指向不变。因此,无论车转向何方,
都能使木仙人的手臂始终指向南方。本文标题下
为其复原后的模型(图1)。图12 所示为中国历
史博物馆展览品:由电池驱动的指南车模型在轨
道上连续绕圈运行其木仙人所指方向不变。
图10 鲍思贺推测宋代燕肃所造指南车的前视图 图11 燕肃所造指南车的俯视图
中立贯心轮高8尺径3寸
右小轮竹绳
左小轮
中心大平轮
左小平轮 右小平轮
左附足立子轮右附足立子轮
左足轮 右足轮
6尺
6尺

系统与控制纵横 2015年第1期48
4. 扰动补偿和不变性原理
从系统和控制的角度分析,指南车是一个保
持方向恒定的自动装置,更具体说是自动调节方
向的系统。被调量是木仙人所指的方向,车辆向
任何方向转弯时(出现对被调量的扰动作用时),
站立车厢的木仙人所指的方向也欲变动,但同时
被齿轮系的反向转动所补偿而不变。它的方框图
如图13所示。值得注意的是,图中从扰动(车辆
转弯)到被调量(木仙人所指反方向)存在两条
通道:上一条经过齿轮系,下一条经过车身和木
仙人。两通道的作用相反,互相抵消(补偿)。
这样奇妙的“双通道”构思出现在11世纪的中
国,真是太令人不可思议了!
与指南车是基于具有行星齿轮的差动齿轮原
理的观点不同,本文作者认为,上述鲍思贺推测
宋代燕肃所造指南车利用的是一个独创的差动系
统。体现在图10中车转弯时车辕前端的移动及后
端的反向移动,这是一种对两轮转速差的测量。
然后通过车辕尾端所连的挂索放落左小轮(或
右小轮),而且有极性(左上右下,或左下右
上)。这整体是一个差动装置。在形成车辆转弯
的同时,左小平轮(或右小平轮)与中心大平轮
的齿挂上,提供对木仙人转动的补偿作用。这是
世界上第一例利用扰动补偿保持系统被调量为恒
值。这是一个开环系统,不是传统意义上的误差
反馈的闭环自动控制系统。
在19世纪,法国数学家兼工程师J-V·彭赛
列(Poncelet, 1788-1867)(图14)为了改善由
英国机械师兼发明家瓦特的蒸汽机速度的控制品
质,针对系统的控制滞后的缺陷,提出了改进方
案:特点是直接测量蒸汽机的负载(扰动),在
它还没有影响蒸汽机的速度之前调整蒸汽流量,
来补偿负载变动,使速度尽量不变或少变。彭赛
列虽然给出了设计方案, 却没能实施。他的思想
也就是上文所说的扰动补偿。显然,这和蒸汽机
增加了离心式飞锤调速器的调速自动控制系统不
同,后者是出现速度误差后,由误差通过调速器
来控制,力图消灭误差。
一百年后,1939年苏联学者Г·В·谢巴诺
夫(Щипанов)在彭赛列研究的基础上,首先提
图12 指南车模型在轨道上连续绕圈运行图 图13 指南车工作原理框图
图14 法国数学家兼工程师J-V·彭赛列
车身
车辆转弯
木人
齿轮系
方向
2015 No.1 All About Systems and Control 49
给定环节 被控对象执行环节放大环节控制器
扰动测量扰动补偿
前馈环路
给定输入 输出
扰动
+
+
-
出并发展了自动控制系统中的不变性原理(俄文
是принцип инвариантности,英文是invariance
principle), 意图通过对扰动的测量, 对它的影响进
行补偿, 使被控对象的被调量不变或近似不变。20
世纪40-50年代苏联院士Н·И·卢静(Лузин)、
Б· Н·彼得罗夫(Петров)等对此进行了系统的
研究,使之发展成为一整套完整的理论。20世纪
60年代流行于苏联的双通道控制就是基于不变性
原理的技术。本文作者则早在1965年就应用不变
性原理和双通道技术来解释、分析燕肃指南车的
原理(图13)。
5. 对两种指南车原理推测的比较和分析
本文认为指南车基于差动齿轮的推测,值得
商榷。一是它根据史书等著作上有关张衡的记
载,这些根据看来不够充分,二是与《宋史·舆
服志》记载的齿轮系及鲍思贺的推测与图8不符,
三是还没有证据表明汉代已发明了差动齿轮。这
个观点本文作者在1965年已经阐明了。
本文作者是指南车基于扰动补偿观点的提出
者。这个观点被国内众多学者所接受。事过50年
回顾这一观点,不论是利用差动齿轮,还是利用
独创的“差动系统”,两种不同观点的差别是:
指南车动作原理到底是基于误差反馈,还是扰动
补偿?
按照自动控制原理:在自动控制系统中除输
入作用外的一切能使被控制量偏离输入作用所要
求的值或规律的系统内外的物理量,称为扰动
(见图9)。像颜志仁给出的图8那样测量两轮转
速之差,也即是测量车身的转弯,在控制齿轮未
开始动作的情况下也是测量车身上木仙人指示方
向的误差。但是,就车身转弯而言,将它处理成
扰动合乎上述扰动的定义。
图8和图10的不同齿轮系,都是测量车身的
转弯,本文作者的指南车基于扰动补偿的观点把
车身转弯处理成扰动。总之,关键是车身转弯到
底是扰动还是误差?应该看到,这个系统元件比
较少、简单,扰动量又等于误差量,容易引起混
淆。但推断是扰动比较恰当。欢迎有兴趣的读者
参加讨论。
当然,针对上述《宋史·舆服志》的引文,
国内外学者们对指南车上的齿轮系描述有不同的
理解和解释,因而推测出种种不同的机械结构,
但这并不影响对自动控制的原理的分析(图9)。
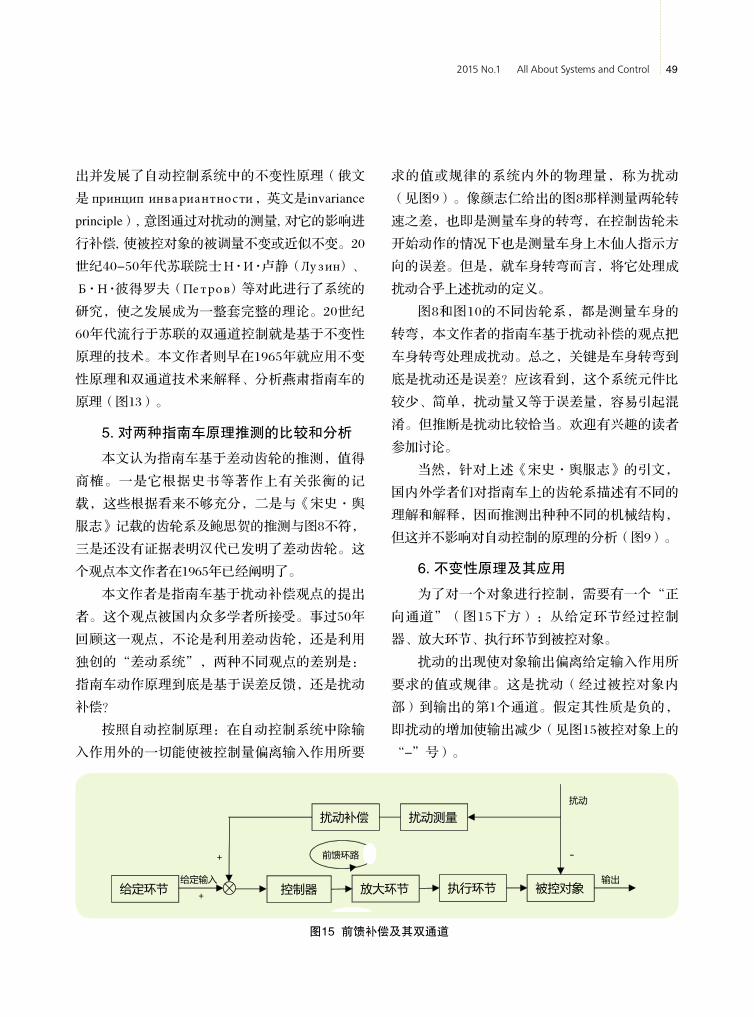
6. 不变性原理及其应用
为了对一个对象进行控制,需要有一个“正
向通道”(图15下方):从给定环节经过控制
器、放大环节、执行环节到被控对象。
扰动的出现使对象输出偏离给定输入作用所
要求的值或规律。这是扰动(经过被控对象内
部)到输出的第1个通道。假定其性质是负的,
即扰动的增加使输出减少(见图15被控对象上的
“-”号)。
图15 前馈补偿及其双通道
系统与控制纵横 2015年第1期50
但是,如果扰动能被测量,再设计一个扰动
补偿装置通过另一条称为“前馈通道”,或称
“前馈环路”将修正后的扰动信号经过控制器
(也可以不经过它)、放大环节、执行环节到被
控对象的输出。这是第2个通道(图15上方)。这
个信号或作用应该设计成是正的。这两个通道的
信号都到达被控对象的输出,其响应正好正负相
消。
为此,这个扰动补偿装置要设计得使这两条
信号到达控制对象的输出时,其合成的响应为
“零”,即输出在扰动出现时是不变的。这就是
不变性原理。
不变性原理是,如何做到被控对象的输出
(被控量)与扰动完全无关,或在一定准确度下
无关的理论。能严格做到对象的输出在动态和稳
态都绝对不变的,称为绝对不变性。以ε误差做
到不变的,称为ε不变性。仅在系统稳态时满足
不变性条件的称为稳态不变性。
这里,如上所述,扰动对被控对象的输出
(被控量)的作用存在两条通道(图15),这称
为双通道技术。这是实现不变性原理的必不可少
的技术或条件。
今设法寻求能实现不变性的扰动补偿装置。
在图15上以F (s )表示扰动作用f (t )的拉氏变
换式,扰动经过的被控对象内部的传递函数为
G内(s),则-F(s) G内(s)表示扰动F(s)对被控对象的输
出的拉氏变换式。
在另一通道,以R测(s)和R补(s)分别表示扰动测
量和扰动补偿装置的传递函数,以G控制器 (s)、K、
G执行(s)和G对(s)分别表示控制器、放大环节、执行
环节和被控对象的传递函数,则根据不变性原理
-F(s)G内(s)+ F(s)R测(s)R补(s) G控制器(s)KG执行(s)G对(s)=0
由此可求出补偿装置的传递函数R补(s),然后
再设法物理上实现或近似实现它。
实例可参阅拙著《控制论——概念、方法与
应用》的3.5.5小节“扰动补偿及其设计”。从中
可以看到,虽然往往不能做到绝对不变性(完全
补偿),只能做到近似的不变性,效果就非常显
著。
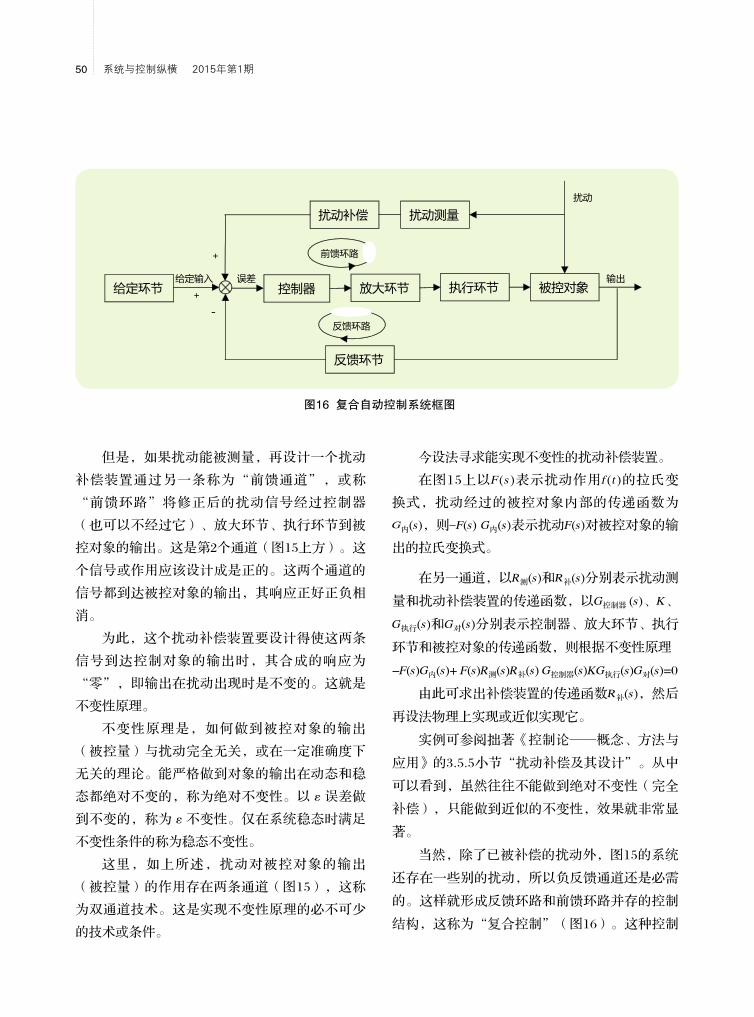
当然,除了已被补偿的扰动外,图15的系统
还存在一些别的扰动,所以负反馈通道还是必需
的。这样就形成反馈环路和前馈环路并存的控制
结构,这称为“复合控制”(图16)。这种控制
图16 复合自动控制系统框图
给定环节
反馈环节
被控对象执行环节放大环节控制器
扰动测量扰动补偿
前馈环路
反馈环路
给定输入 误差 输出
扰动
+
+
-

2015 No.1 All About Systems and Control 51
结构对抑制扰动的影响有很大的优点,而且很实
用。
这里举一个作者亲自参与的实际应用的例
子。陕西某彩色显像管厂,应用计算机作为PID
控制器对大型显像管玻璃炉进行炉温自动控制。
玻璃炉在结构上可分为四个部分:熔解池、工作
池、两个蓄热室和两台投料机。大型玻璃炉有2层
楼高(图17),仅熔解池就有75m2面积。因此,
玻璃炉的时间常数(惯性)巨大。炉内温度高达
1300℃,极易受到投料(玻璃原料)和西北地区
昼夜温差大而炉体散热变动的巨大影响。采用
一般的PID控制器进行反馈控制,炉内温度波动
大,影响产品质量。
为此,在控制系统中实现对上述两个主要扰
动的补偿。向炉内的投料量是可测量的。投料量
转换成电信号,再经过扰动补偿环节输入计算
机,实现对投料量的扰动补偿;昼夜温差可以采
用温度传感器来测量车间外的大气温度,再经过
变送器、扰动补偿环节输入计算机,实现对昼夜
温差的扰动补偿。结果玻璃炉的炉温控制效果很
好。炉内的温度保持在1300±3℃之内。
其次,不变性原理可以推广应用到多变量系
统解耦的场合。与单变量系统相比,多变量系统
的控制要复杂得多。多变量系统的每个输出量通
常都同时受到几个输入量的控制和影响,这种现
象称为耦合或交叉影响。
工业锅炉是一个典型例子(图18)。这个被
控对象有五个被控输出量:蒸汽压力PT ,蒸汽温
度θ,汽包水位H,炉膛负压P V 和过量空气系数
α。被控对象中也有五个可作为控制手段的输入
量:给水流量W,喷水量Ws ,燃料量 B ,送风量
AF 以及引风量EG。
图17 彩色显像管厂的大型玻璃炉
图18 工业锅炉生产过程示意图 图19 5输入量-5输出量锅炉对象框图
水位 H
燃料 B
送风量 A F 给水 W
省煤器
过热器 I
D
喷水 W s
过热器 II
pT g
工业锅炉
喷水量 W s
给水量 W
燃料量 B
送风量 A F
引风量 EG
汽包水位 H
汽温 θ
汽压 pT
过量空气系数 α
炉膛负压pv
系统与控制纵横 2015年第1期52
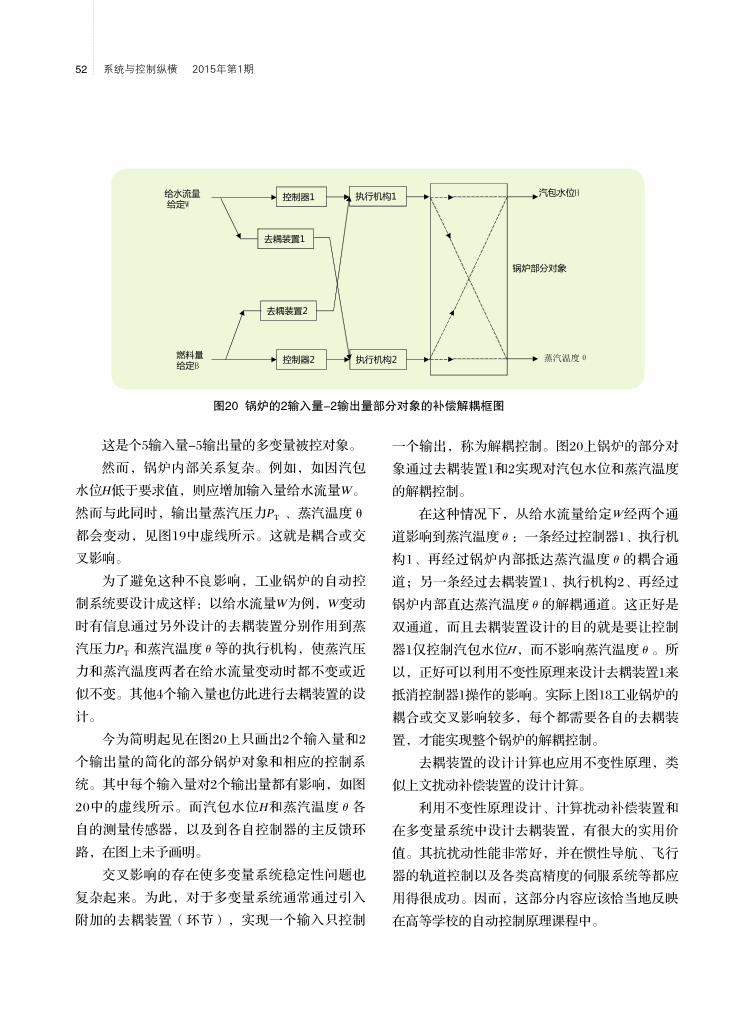
这是个5输入量-5输出量的多变量被控对象。
然而,锅炉内部关系复杂。例如,如因汽包
水位H低于要求值,则应增加输入量给水流量W。
然而与此同时,输出量蒸汽压力PT 、蒸汽温度θ
都会变动,见图19中虚线所示。这就是耦合或交
叉影响。
为了避免这种不良影响,工业锅炉的自动控
制系统要设计成这样:以给水流量W为例,W变动
时有信息通过另外设计的去耦装置分别作用到蒸
汽压力PT 和蒸汽温度θ等的执行机构,使蒸汽压
力和蒸汽温度两者在给水流量变动时都不变或近
似不变。其他4个输入量也仿此进行去耦装置的设
计。
今为简明起见在图20上只画出2个输入量和2
个输出量的简化的部分锅炉对象和相应的控制系
统。其中每个输入量对2个输出量都有影响,如图
20中的虚线所示。而汽包水位H 和蒸汽温度θ 各
自的测量传感器,以及到各自控制器的主反馈环
路,在图上未予画明。
交叉影响的存在使多变量系统稳定性问题也
复杂起来。为此,对于多变量系统通常通过引入
附加的去耦装置(环节),实现一个输入只控制
一个输出,称为解耦控制。图20上锅炉的部分对
象通过去耦装置1和2实现对汽包水位和蒸汽温度
的解耦控制。
在这种情况下,从给水流量给定W 经两个通
道影响到蒸汽温度θ:一条经过控制器1、执行机
构1、再经过锅炉内部抵达蒸汽温度θ 的耦合通
道;另一条经过去耦装置1、执行机构2、再经过
锅炉内部直达蒸汽温度θ的解耦通道。这正好是
双通道,而且去耦装置设计的目的就是要让控制
器1仅控制汽包水位H ,而不影响蒸汽温度θ。所
以,正好可以利用不变性原理来设计去耦装置1来
抵消控制器1操作的影响。实际上图18工业锅炉的
耦合或交叉影响较多,每个都需要各自的去耦装
置,才能实现整个锅炉的解耦控制。
去耦装置的设计计算也应用不变性原理,类
似上文扰动补偿装置的设计计算。
利用不变性原理设计、计算扰动补偿装置和
在多变量系统中设计去耦装置,有很大的实用价
值。其抗扰动性能非常好,并在惯性导航、飞行
器的轨道控制以及各类高精度的伺服系统等都应
用得很成功。因而,这部分内容应该恰当地反映
在高等学校的自动控制原理课程中。
图20 锅炉的2输入量-2输出量部分对象的补偿解耦框图
控制器2
去耦装置1
去耦装置2
执行机构2
执行机构1控制器1给水流量给定W
燃料量给定B
汽包水位H
蒸汽温度θ
锅炉部分对象
2015 No.1 All About Systems and Control 53
要实现或应用不变性原理,扰动必须是可测
量的。这限制了它的应用。中科院已故控制学家
韩京清创立自抗扰控制的理论与方法,可以避开
这个限制,代价是自抗扰装置比较复杂。但工
业界研制的运动控制系统用的“自抗扰控制芯
片”,已付诸应用。
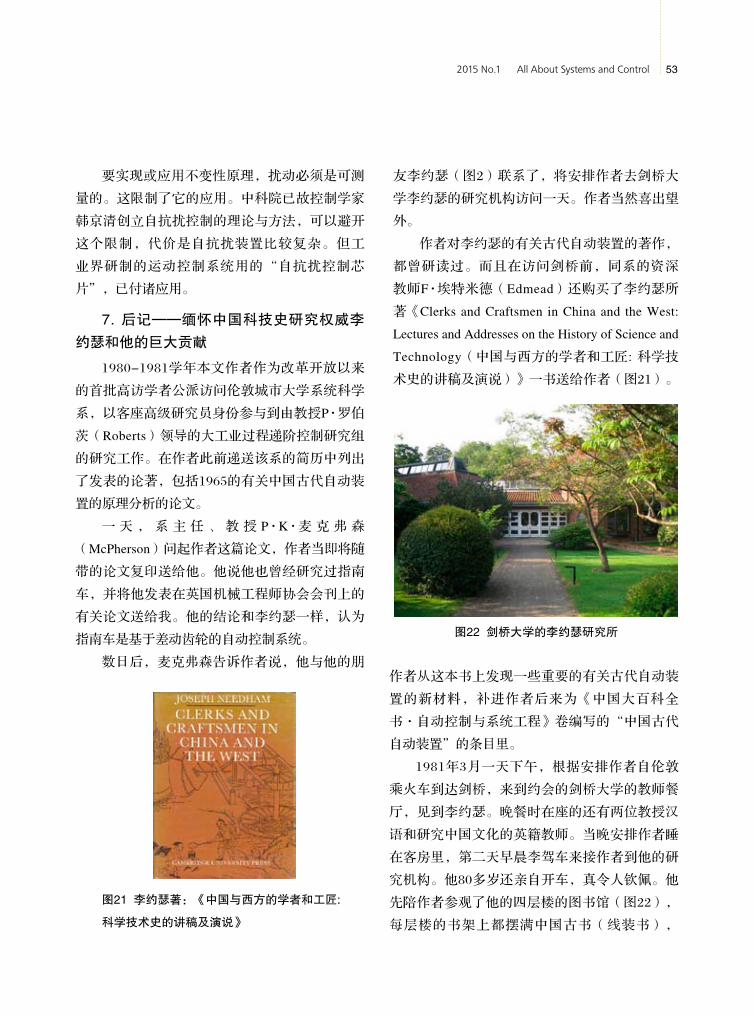
7. 后记——缅怀中国科技史研究权威李
约瑟和他的巨大贡献
1980-1981学年本文作者作为改革开放以来
的首批高访学者公派访问伦敦城市大学系统科学
系,以客座高级研究员身份参与到由教授P·罗伯
茨(Roberts)领导的大工业过程递阶控制研究组
的研究工作。在作者此前递送该系的简历中列出
了发表的论著,包括1965的有关中国古代自动装
置的原理分析的论文。
一 天 , 系 主 任 、 教 授 P·K·麦 克 弗 森
(McPherson)问起作者这篇论文,作者当即将随
带的论文复印送给他。他说他也曾经研究过指南
车,并将他发表在英国机械工程师协会会刊上的
有关论文送给我。他的结论和李约瑟一样,认为
指南车是基于差动齿轮的自动控制系统。
数日后,麦克弗森告诉作者说,他与他的朋
友李约瑟(图2)联系了,将安排作者去剑桥大
学李约瑟的研究机构访问一天。作者当然喜出望
外。
作者对李约瑟的有关古代自动装置的著作,
都曾研读过。而且在访问剑桥前,同系的资深
教师F·埃特米德(Edmead)还购买了李约瑟所
著《Clerks and Craftsmen in China and the West:
Lectures and Addresses on the History of Science and
Technology(中国与西方的学者和工匠: 科学技
术史的讲稿及演说)》一书送给作者(图21)。
作者从这本书上发现一些重要的有关古代自动装
置的新材料,补进作者后来为《中国大百科全
书·自动控制与系统工程》卷编写的“中国古代
自动装置”的条目里。
1981年3月一天下午,根据安排作者自伦敦
乘火车到达剑桥,来到约会的剑桥大学的教师餐
厅,见到李约瑟。晚餐时在座的还有两位教授汉
语和研究中国文化的英籍教师。当晚安排作者睡
在客房里,第二天早晨李驾车来接作者到他的研
究机构。他80多岁还亲自开车,真令人钦佩。他
先陪作者参观了他的四层楼的图书馆(图22),
每层楼的书架上都摆满中国古书(线装书),
图21 李约瑟著:《中国与西方的学者和工匠:
科学技术史的讲稿及演说》
图22 剑桥大学的李约瑟研究所

系统与控制纵横 2015年第1期54
图23 横跨于剑河上
的“牛顿桥”

2015 No.1 All About Systems and Control 55
按数、理、化、天、地、生、农、医及工程技术
等,分楼层分类存放,令人惊讶。此后又到了他
的研究室,见到他的70多岁的华裔女助手、博士
(后来又是他的续弦妻子)鲁桂珍。她从抽斗中
取出作者的上述论文,三人进行有趣的讨论。
午餐后他安排一位年轻助手陪同作者参观了
校园和各学院的古老建筑,讲解它们的历史故
事,并带领作者踏上横跨于剑河(River Cam)
之上一座古老的木桥——有名的“牛顿桥”(图
23),介绍了有关牛顿与桥的历史故事。
这是一次令作者终身不忘的安排和访问。试
想作者比李约瑟小28岁,当时仅是一个刚升几
年的副教授。而他是英国皇家学会的会员、英国
国家学术院(British Academy)院士和剑桥大学
Gonville and Caius学院前任院长。作者为了自动
控制课程教学只是短暂涉足于古代自动装置的研
究,而他是终身奉献于中国科学技术史的研究,
著作等身,在全世界享有崇高的学术声誉。这次
安排和访问只能以他对中国人民友好、热爱中国
和热爱中国文化来解释。
新中国成立后,李约瑟发起并分别就任英中
友好协会会长、英中了解协会会长。1994年94岁
高龄的李约瑟当选为中国科学院首批外籍院士。
参考文献From Wikipedia, the free encyclopedia. South-[1]
pointing chariot. en.wikipedia.org/wiki/... , 2013-
01-18 (维基百科,自由的百科全书. 指南车).
颜志仁. 中国古代指南车的原理和构造. 上海机械[2]
学院学报, 1984, (3): 31-40.
Needham J. Science and Civilisation in China: [3]
Volume 4, Physics and Physical Technology.
Part 2, Mechanical Engineering. Cambridge, UK:
Cambridge University Press, 1965.
Booth, A D. Progress in Automation. Butterworths [4]
Scientific Publications, London. 1960.
万百五. 我国古代自动装置的原理分析及其成就[5]
的探讨. 自动化学报, 1965, 3(2): 57-65.
万百五. 中国古代自动装置(条目), 载于:中国大[6]
百科全书“自动控制与系统工程”卷,589-591
页,北京:中国大百科全书出版社,1991.
刘仙洲. 中国机械工程发明史·第一编. 北京:科学[7]
图24 李约瑟巨著的中译本《中国科学技术史》
1995年他以95岁的高龄在剑桥寓所逝世。此前,
他的原名为东亚科学史图书馆的单位已发展成为
李约瑟研究所(Needham Research Institute)。
他的巨著《中国科学技术史(Science and
Civilisation in China)》的研究和出版计划,
在他去世时尚未全部完成。由他的学生和后继者
在继续研究,到2008年已出齐了7卷27册。这部
巨著正在国内按册翻译由科学出版社出版(图
24)。1987年他的这部巨著荣获中国国家自然科
学奖一等奖。不少中国学者在他的影响下投身这
个领域,继续这项极重要的研究。
作者谨在此缅怀李约瑟院士和他的历史贡
献,以纪念他逝世20周年。
系统与控制纵横 2015年第1期56
*
卡尔曼滤波称得上是现代系统科学和控
制论的皇冠级成果(卡尔曼因此于 2008年获
得了被誉为工程诺贝尔奖的德雷珀奖)。一般
来说,无论从复杂系统控制与优化的哪方面
讲,噪声和扰动情形下的估计都是一个关键
问题。过去,我的博客及发表过的论文曾涉
及和讨论了这类问题的方方面面[1,2]。然而,
这些材料分散在各处,且时日已久。因此,
将所有这些资料整合起来,并结合最新的文
献呈现给读者,似乎是一件值得去做的事情。
同时,作为一次尝试,本文希望向非专业的
普通科学公众阐释这一问题。
读者仅需高中代数而无需概率论知识,
便可理解这篇文章的绝大部分内容——包括
非线性滤波和估计。至于概率论的概念和解
释,我此前有关概率论和随机过程的五篇讲
座博文的内容就足够了[3,4,5,6,7]。了解概率论
中的初等贝叶斯准则会有帮助,但是本文中
我也将讲解这一问题。
首先,我们不用概率论或其它知识基础,
来较为直观地解释卡尔曼滤波器。考虑如下
一个简单的估计问题:已有关于一个未知常
数 x的一组测量值 1 2, , kz z z (通常简记为
1kz )。假设有如下可加模型:
1, 2, ,i iz x v i k (1)
其中 iv 是测量噪声。在给定 k个测量值 1kz 的
条件下,如果没有任何别的信息,则对 x的一种合理估计是:
1
1ˆ .k
k ii
x zk
(2)
*该文是何毓琦教授发表在科学网上一篇博文的中文翻译稿,原文请见:
http://blog.sciencenet.cn/home.php?mod=space&uid=1565&do=blog&id=851754,
译者是中国科学院数学与系统科学研究院万林副研究员。
出版社. 1962.
万百五. 控制论——概念、方法与应用. 北京:清华[8]
大学出版社(第2版). 2014.
Needham J. Clerks and Craftsmen in China and the [9]
West: Lectures and Addresses on the History of
Science and Technology, UK: Cambridge University
Press, 1970.
高志强. 抗扰控制思想探究. 控制理论与应用. 2013, [10]
(30)12: 1498-1510.
Preminger J. Some considerations relating to control [11]
systems employing the invariance principle. IEEE
Transactions on Automatic Control, 1964, 9(3): 209
-213.
搜狗百科. 不变性原理. - baike.sogou.com - 2014-[12]
12-17.
Needham J. Science and Civilisation in China. UK: [13]
Cambridge University Press. 7 volumes, 27 parts.
1954-2008.
陆敬严. 八十年来指南车的研究. 自然辩证法通讯. [14]
1984, 6(1):53-58.
韩崇昭, 王月娟, 万百五. 随机系统理论. 西安:西[15]
安交通大学出版社, 1987.
Zhang H, Han C, Wan B, Shi R. Identification and [16]
control of a large kinescope glass furnace, Automatica,
1994, 30 (3): 887-892.
【作者简介】 万百五,教授、博士生导师。1928年9月
生,江苏南京人。1949年毕业于交通大学电机系,1951
年该校电讯研究所研究生毕业,留校任教。1958年任西
安交通大学自动控制教研室副主任,1978年调任系统工
程研究所大系统研究室主任。1980-1981年公派在英国
伦敦City University系统科学系任客座高级研究员,后被
聘为客座教授。曾任中国自动化学会常务理事以及国内
三个顶级控制杂志编委、英国机械工程师协会会刊 Part
I《Journal of Systems and Control Engineering》杂志
编委多年;现任国际自动控制联合会(IFAC)大规模
复杂系统技术委员会委员。专长大系统理论与应用的研
究。曾获陕西省科学大会奖及省(部)科技进步一等奖
两次、二等奖两次、三等奖一次,并被授予“陕西省科
技精英”及优秀博士生指导教师荣誉证书;享有国务院
给予的政府特殊津贴。有著(译)作7种出版,包括教材
《控制论——概念、方法与应用》(第2版),清华大学
出版社,2014;专著2本:《大工业过程计算机在线稳态
优化控制》(科学出版社)及《工业大系统优化与产品
质量控制》(科学出版社),并有410余篇学术论文在国
内外期刊等发表。入选《20世纪中国知名科学家学术成
就概览 . 管理学卷》(科学出版社)。
2015 No.1 All About Systems and Control 57
教学交流
*
卡尔曼滤波称得上是现代系统科学和控
制论的皇冠级成果(卡尔曼因此于 2008年获
得了被誉为工程诺贝尔奖的德雷珀奖)。一般
来说,无论从复杂系统控制与优化的哪方面
讲,噪声和扰动情形下的估计都是一个关键
问题。过去,我的博客及发表过的论文曾涉
及和讨论了这类问题的方方面面[1,2]。然而,
这些材料分散在各处,且时日已久。因此,
将所有这些资料整合起来,并结合最新的文
献呈现给读者,似乎是一件值得去做的事情。
同时,作为一次尝试,本文希望向非专业的
普通科学公众阐释这一问题。
读者仅需高中代数而无需概率论知识,
便可理解这篇文章的绝大部分内容——包括
非线性滤波和估计。至于概率论的概念和解
释,我此前有关概率论和随机过程的五篇讲
座博文的内容就足够了[3,4,5,6,7]。了解概率论
中的初等贝叶斯准则会有帮助,但是本文中
我也将讲解这一问题。
首先,我们不用概率论或其它知识基础,
来较为直观地解释卡尔曼滤波器。考虑如下
一个简单的估计问题:已有关于一个未知常
数 x的一组测量值 1 2, , kz z z (通常简记为
1kz )。假设有如下可加模型:
1, 2, ,i iz x v i k (1)
其中 iv 是测量噪声。在给定 k个测量值 1kz 的
条件下,如果没有任何别的信息,则对 x的一种合理估计是:
1
1ˆ .k
k ii
x zk
(2)
*该文是何毓琦教授发表在科学网上一篇博文的中文翻译稿,原文请见:
http://blog.sciencenet.cn/home.php?mod=space&uid=1565&do=blog&id=851754,
译者是中国科学院数学与系统科学研究院万林副研究员。

系统与控制纵横 2015年第1期58
由于测量噪声的值可正可负,我们通过取其
平均值,使得噪声正负相互抵消(注意,如
果噪声的平均值是未知的,那么该平均值与
未知量 x无异,并且无法与 x区分开来,从而在技术上将我们处于一种不可观测的情
形。习题 1:你是否可以将上述注释解释给
其他读者?当 k趋向无穷时,公式(2)的结
果是什么?)
现在,通过简单的代数运算,我们可以
将公式(2)重写为:
1 1
1 1
1 1 1 1 1ˆ1
k k
k i k i ki i
kx z z z zk k k k k
1 11ˆ ˆ( ).k k kx z xk
(3)
公式(3)尽管只是公式(2)的一种递推形
式,但它却能提供一种有趣的解释——即在
k个观测值后对 x的估计,等于 1k 个观测
值后对 x的估计外加一个修正项。修正项指的是以 1k 个观测值为基础的估计值 1ˆkx
与测量值 kz 之间的差。该差值归因于以下两
个来源:
(i) 当 1ˆkx 与 x不同时,需要使用修正
项校正新的估计值 ˆkx ;
(ii) 当 1ˆkx 与 x相等时,应忽略仅仅因
噪音 kv 而引起的修正项。
系数1/ k,称为修正项的权重因子,体现了以上两种可能性之间合理的权衡。在开始阶
段,即在小 k值的情况下,无法对 x进行准确的估计,需要重点考虑修正项。随着 k逐
渐变大,对 x的估计也越来越可信,这时只需少量考虑修正项就可以了(如果熟悉概率
论,你会联想起大数定律)。当 k趋向无穷时,情况(ii)适用,我们就可完全忽略修正项。
如果我们将1/ k表示为 kP ,那么通过简单的
代数运算可将 kP 用以下递推形式表示:
11 1 1 1( 1) .k k k k kP P P P P (4)
信不信由你,在这种简单情形下,方程
(3-4)就是“卡尔曼滤波”的表达公式。对熟
悉“随机逼近”文献的读者,方程(3)就
是 ( )f x x情形下利用梯度下降的思想不断逼近函数 ( )f x 的根。公式(1)也可以视
为简单的最小二乘拟合问题
2ˆ
1
1 ˆMin ( )2k
k
x i ki
z x (5)
的解。我们可以将以上最小二乘法(或随机
逼近、大数定律、卡尔曼滤波器)的思想推
广至更多深刻而有用的情形。下面我们举例
说明。
首先,假设 x为一个向量,那么根本无需改变公式(3-4)。实际上,我们可以将公
式(1)推广为:
1, 2, .i iH v i kz x (1’)
其中H是由标量因子构成的矩阵。注意,这里 x和 z的维数无须相同。例如, x可以是飞行器在天空中的位置和速度的六维变量,
而 z为测量该飞行器与地面某点之间角度关系的一维变量(在本例中H为一个 1×6 行
向量)。现在公式(3-4)变为:
1 1ˆ ˆ ˆ( ),k k k k kP Hx x z x (3’)
11 1 1 1( ) ,T T
k k k k kP P P H HP H I HP (4’)
其中 kP 是一个 n n矩阵,上标T 表示“转
置”。(注意,通过将全部变量视为标量,公
式(3-4)的正确性显而易见)
我们可以将公式(3-4)进一步扩展到动
态方程的情形。假设未知量 x根据如下的方程演化:
1 0, 1, 2, =i i i kx x x x给定 (5’)
这时我们想知道如何进一步修改公式
(3’-4’)。此时,虽然代数运算变得有些繁琐,
但基本原则是相同的(即最小二乘拟合)。我
们希望基于已知的全部测量值,得到关于未
知量x的估计 ˆkx 。为了简化运算,我们考虑
2k 的 情 况 , 即 我 们 希 望 求 解 :
2 22 1
1Min [( ) ( ) ].2
H Hx x z x z (6)
上述关于x的最优解为
2 1 2 2 1 1 1ˆ ˆ ˆ ˆ( ); .P H Hx x z x x z (3”)
12 2 2 2 2( ) ;T TP M M H HM H I HM
2 1 1; .TM P P I (4’’)
于是公式(3'-4')变为公式(3"-4")。
公式(5)可进一步推广为:
1 1,i i ix x w (5’)
其中 1iw 为上述动态方程中扰动噪声项。最
后,令 x为一个 n维向量,并令噪声项和扰动项带有不同的权重“ R”和“Q”,那么我们仅需对其中的矩阵加转置,将数字 1变
为单位矩阵,同时插入Q和R权重项,最后得到:
11 1
1
ˆ ˆ ˆ( ); ˆ
Tk k k k kP H R Hx x z x
x 给定.(3*)
1( ) ;T Tk k k k kP M M H HM H R HM
1 1+ ; .Tk kM P Q P 给定 (4*)
无疑,公式(3*- 4*)展现了卡尔曼滤波公
式的全貌。我尤其想强调的是,以上推导仅
需一些矩阵代数运算,而不涉及矩阵理论。
同时,公式(3*- 4*)也可以通过求解如下
一般的最小二乘问题并施以复杂的矩阵代数
运算后得到:
ˆ 1 11
1
1 ˆ ˆ ˆ ˆMin { ( ) ( )2
ˆ ˆ ( ) ( )}.
i
kT
i i i ii
kT
i i i ii
Q
H R H
x x x x x
z x z x (6*)
这里矩阵项(或标量因子)Q和 R表示噪声项w和 v的相应权重。
通过解决上述最小化问题(除了使用矩
阵代数运算外,没有涉及其它新的概念),我
们也直接得到了熟知的卡尔曼滤波器公式
(3*- 4*)。
图 1展示了一个关于卡尔曼滤波器实现
过程的方框图:

2015 No.1 All About Systems and Control 59
由于测量噪声的值可正可负,我们通过取其
平均值,使得噪声正负相互抵消(注意,如
果噪声的平均值是未知的,那么该平均值与
未知量 x无异,并且无法与 x区分开来,从而在技术上将我们处于一种不可观测的情
形。习题 1:你是否可以将上述注释解释给
其他读者?当 k趋向无穷时,公式(2)的结
果是什么?)
现在,通过简单的代数运算,我们可以
将公式(2)重写为:
1 1
1 1
1 1 1 1 1ˆ1
k k
k i k i ki i
kx z z z zk k k k k
1 11ˆ ˆ( ).k k kx z xk
(3)
公式(3)尽管只是公式(2)的一种递推形
式,但它却能提供一种有趣的解释——即在
k个观测值后对 x的估计,等于 1k 个观测
值后对 x的估计外加一个修正项。修正项指的是以 1k 个观测值为基础的估计值 1ˆkx
与测量值 kz 之间的差。该差值归因于以下两
个来源:
(i) 当 1ˆkx 与 x不同时,需要使用修正
项校正新的估计值 ˆkx ;
(ii) 当 1ˆkx 与 x相等时,应忽略仅仅因
噪音 kv 而引起的修正项。
系数1/ k,称为修正项的权重因子,体现了以上两种可能性之间合理的权衡。在开始阶
段,即在小 k值的情况下,无法对 x进行准确的估计,需要重点考虑修正项。随着 k逐
渐变大,对 x的估计也越来越可信,这时只需少量考虑修正项就可以了(如果熟悉概率
论,你会联想起大数定律)。当 k趋向无穷时,情况(ii)适用,我们就可完全忽略修正项。
如果我们将1/ k表示为 kP ,那么通过简单的
代数运算可将 kP 用以下递推形式表示:
11 1 1 1( 1) .k k k k kP P P P P (4)
信不信由你,在这种简单情形下,方程
(3-4)就是“卡尔曼滤波”的表达公式。对熟
悉“随机逼近”文献的读者,方程(3)就
是 ( )f x x情形下利用梯度下降的思想不断逼近函数 ( )f x 的根。公式(1)也可以视
为简单的最小二乘拟合问题
2ˆ
1
1 ˆMin ( )2k
k
x i ki
z x (5)
的解。我们可以将以上最小二乘法(或随机
逼近、大数定律、卡尔曼滤波器)的思想推
广至更多深刻而有用的情形。下面我们举例
说明。
首先,假设 x为一个向量,那么根本无需改变公式(3-4)。实际上,我们可以将公
式(1)推广为:
1, 2, .i iH v i kz x (1’)
其中H是由标量因子构成的矩阵。注意,这里 x和 z的维数无须相同。例如, x可以是飞行器在天空中的位置和速度的六维变量,
而 z为测量该飞行器与地面某点之间角度关系的一维变量(在本例中H为一个 1×6 行
向量)。现在公式(3-4)变为:
1 1ˆ ˆ ˆ( ),k k k k kP Hx x z x (3’)
11 1 1 1( ) ,T T
k k k k kP P P H HP H I HP (4’)
其中 kP 是一个 n n矩阵,上标T 表示“转
置”。(注意,通过将全部变量视为标量,公
式(3-4)的正确性显而易见)
我们可以将公式(3-4)进一步扩展到动
态方程的情形。假设未知量 x根据如下的方程演化:
1 0, 1, 2, =i i i kx x x x给定 (5’)
这时我们想知道如何进一步修改公式
(3’-4’)。此时,虽然代数运算变得有些繁琐,
但基本原则是相同的(即最小二乘拟合)。我
们希望基于已知的全部测量值,得到关于未
知量x的估计 ˆkx 。为了简化运算,我们考虑
2k 的 情 况 , 即 我 们 希 望 求 解 :
2 22 1
1Min [( ) ( ) ].2
H Hx x z x z (6)
上述关于x的最优解为
2 1 2 2 1 1 1ˆ ˆ ˆ ˆ( ); .P H Hx x z x x z (3”)
12 2 2 2 2( ) ;T TP M M H HM H I HM
2 1 1; .TM P P I (4’’)
于是公式(3'-4')变为公式(3"-4")。
公式(5)可进一步推广为:
1 1,i i ix x w (5’)
其中 1iw 为上述动态方程中扰动噪声项。最
后,令 x为一个 n维向量,并令噪声项和扰动项带有不同的权重“ R”和“Q”,那么我们仅需对其中的矩阵加转置,将数字 1变
为单位矩阵,同时插入Q和R权重项,最后得到:
11 1
1
ˆ ˆ ˆ( ); ˆ
Tk k k k kP H R Hx x z x
x 给定.(3*)
1( ) ;T Tk k k k kP M M H HM H R HM
1 1+ ; .Tk kM P Q P 给定 (4*)
无疑,公式(3*- 4*)展现了卡尔曼滤波公
式的全貌。我尤其想强调的是,以上推导仅
需一些矩阵代数运算,而不涉及矩阵理论。
同时,公式(3*- 4*)也可以通过求解如下
一般的最小二乘问题并施以复杂的矩阵代数
运算后得到:
ˆ 1 11
1
1 ˆ ˆ ˆ ˆMin { ( ) ( )2
ˆ ˆ ( ) ( )}.
i
kT
i i i ii
kT
i i i ii
Q
H R H
x x x x x
z x z x (6*)
这里矩阵项(或标量因子)Q和 R表示噪声项w和 v的相应权重。
通过解决上述最小化问题(除了使用矩
阵代数运算外,没有涉及其它新的概念),我
们也直接得到了熟知的卡尔曼滤波器公式
(3*- 4*)。
图 1展示了一个关于卡尔曼滤波器实现
过程的方框图:

系统与控制纵横 2015年第1期60
1
因此,可以用一句话来概括卡尔曼滤波
器理论的精髓:“删除所有已知的影响因素,
并对余下因素取平均值”。这是唯一能做的
最佳选择。卡尔曼滤波器不过是上述语句的
一种数学表述,它是一种绝妙的最小二乘拟
合,也是大数定律的一种非常精致的应用。
贝叶斯决策理论也可从概率的角度对卡
尔曼滤波器做出非常令人满意的阐释[8,9]。稍
后,我们将最小二乘拟合的概念推广到非线
性情形后,再讲解这一内容(参考有关确定
性非线性滤波的内容[2])。
严格意义上讲,卡尔曼滤波器只适用于
带有高斯型扰动和测量噪声的线性系统。由
于大量实际问题是非线性和非高斯型的,便
自然而然地产生了关于非线性滤波和估计的
问题以及与之相关的问题:“在现实中我们该
怎么办?”
有关非线性估计,目前最为通行的方法
是所谓的扩展卡尔曼滤波——即首先对非线
性系统猜测性地估计其轨迹。在估计的轨迹
附近进行线性化处理,并且应用通常的卡尔
曼滤波器公式于该线性化的系统。你可以通
过新的数据和重新线性化不断地递推和更新
估计轨迹。一切看起来很有效。唯一的问题
是,卡尔曼滤波是基于单峰(高斯型)分布
的。如果你的问题涉及和(或)导致多峰分
布,你就无法通过不断的线性化逼近这类严
重的非线性情形,从而这种方法将无法适用
或将得出很坏的估计。
第二种方法是非线性最小二乘数据拟
合。这种方法可以追溯到我们最初提到的观
点,即最优滤波本质上是最小二乘拟合。因
此,这一方法相当稳健有效。唯一的问题是,
它无法实时估计。对每一个新的测量值,都
需要解决一个新的两点边界值问题。在测量
值较少且观测间隔较长的情形下,这一方法
比较有用(例如漫长的太空航行)。否则,除
非很少更新,这种方法的计算量极大,在实
时情形下缺少实用性。
第三种方法称为粒子滤波。我们将其放
在本教程的概率方法部分进行讨论。
到这里,在无需概率论知识的情形下,
关于实际滤波问题,我想你们已经了解了全
部值得了解的内容。
(第一部分结束)
现在,我们从概率的角度将以上的公式
重新推导:
当我们讲x是一个随机变量时,意味着被采样之前,该变量的实际值是未知的。我
们使用概率密度函数(pdf, ( )p x ),即采样值介于x和 dx x之间的概率,来表示这种可变性。可以说,概率是用来精确地处理不
确定性问题的方法。作为确定性函数,概率
密度函数(pdf, ( )p x )正是此类精确方法。目前,即便可以对一个多变量函数进行计算,
也是非常麻烦的[10](这是应用数学论文和教
科书中鲜少提及的难言困惑)。为了简化随机
变量的描述,我们通常使用其均值和方差来
刻画一个概率密度函数的粗略特征(即平均
值和以平均值为中心的扩展程度)。我在此前
关于概率论的教程中已经解释了上述基础概
念(请阅读第一部分提到的五篇教程)。
在系统研究中,我们对所谓的输入输出
关系甚感兴趣。如果一个系统的输入是随机
的,那么输出也将是随机的。基于输入的概
率密度函数,我们希望了解输出的概率密度
函数。特别地,我们希望知道当 ( )fy x 且
给定 ( )p x 时 ( )p y 是什么样子。下面对公式(3’-4’)和(5)或(5’)在概率情形下进行
阐述。
(i) 传播方程。假设 1 1( , )k k kfx x w ,
这是公式(5)的非线性输入输出的推广。
那么,给定 1( )kp x 和 1( )kp w ,我们得到:
1 1 1( ) ( | ) ( )d ,k k k k kp p px x x x x (5’’)
这里,原则上在给定 ( )kp w 及关系式
1 1( , )k k kfx x w 的情况下, 1( | )k kp x x是可知的。
(ii) 更新方程。假设 ( , )k k khz x v ,这是
公式(1’)的非线性推广。于是根据贝叶斯
准则,公式(4)(或 4’ 或 4*)的概率表述为:
( | )( | ) ( ),
( )pp p
pz xx z x
z (4’’)
其中 ( )p x 是 x的所谓先验概率密度函数,
( | )p x z 是 x的后验概率密度函数,即在测
量 z条件下的x的概率。同样,已知 ( )kp v 和
关系式 ( , )k k khz x v , 我们可以原则上给
出 ( | )p z x 和 ( ) ( | )dp pz z x x。
注意,我们讲的是“原则上”与公式(4’’)
和(5’’)的关联。这里值得再一次强调应用
数学的难言之困惑[10],即在计算上基本不可
能处理一般的多变量方程。如果x, z,w及 v
都是n维向量的话,公式(4’’)和(5’’)看
似简单,实则难以计算。因此,我们寻求对
2015 No.1 All About Systems and Control 61
1
因此,可以用一句话来概括卡尔曼滤波
器理论的精髓:“删除所有已知的影响因素,
并对余下因素取平均值”。这是唯一能做的
最佳选择。卡尔曼滤波器不过是上述语句的
一种数学表述,它是一种绝妙的最小二乘拟
合,也是大数定律的一种非常精致的应用。
贝叶斯决策理论也可从概率的角度对卡
尔曼滤波器做出非常令人满意的阐释[8,9]。稍
后,我们将最小二乘拟合的概念推广到非线
性情形后,再讲解这一内容(参考有关确定
性非线性滤波的内容[2])。
严格意义上讲,卡尔曼滤波器只适用于
带有高斯型扰动和测量噪声的线性系统。由
于大量实际问题是非线性和非高斯型的,便
自然而然地产生了关于非线性滤波和估计的
问题以及与之相关的问题:“在现实中我们该
怎么办?”
有关非线性估计,目前最为通行的方法
是所谓的扩展卡尔曼滤波——即首先对非线
性系统猜测性地估计其轨迹。在估计的轨迹
附近进行线性化处理,并且应用通常的卡尔
曼滤波器公式于该线性化的系统。你可以通
过新的数据和重新线性化不断地递推和更新
估计轨迹。一切看起来很有效。唯一的问题
是,卡尔曼滤波是基于单峰(高斯型)分布
的。如果你的问题涉及和(或)导致多峰分
布,你就无法通过不断的线性化逼近这类严
重的非线性情形,从而这种方法将无法适用
或将得出很坏的估计。
第二种方法是非线性最小二乘数据拟
合。这种方法可以追溯到我们最初提到的观
点,即最优滤波本质上是最小二乘拟合。因
此,这一方法相当稳健有效。唯一的问题是,
它无法实时估计。对每一个新的测量值,都
需要解决一个新的两点边界值问题。在测量
值较少且观测间隔较长的情形下,这一方法
比较有用(例如漫长的太空航行)。否则,除
非很少更新,这种方法的计算量极大,在实
时情形下缺少实用性。
第三种方法称为粒子滤波。我们将其放
在本教程的概率方法部分进行讨论。
到这里,在无需概率论知识的情形下,
关于实际滤波问题,我想你们已经了解了全
部值得了解的内容。
(第一部分结束)
现在,我们从概率的角度将以上的公式
重新推导:
当我们讲x是一个随机变量时,意味着被采样之前,该变量的实际值是未知的。我
们使用概率密度函数(pdf, ( )p x ),即采样值介于x和 dx x之间的概率,来表示这种可变性。可以说,概率是用来精确地处理不
确定性问题的方法。作为确定性函数,概率
密度函数(pdf, ( )p x )正是此类精确方法。目前,即便可以对一个多变量函数进行计算,
也是非常麻烦的[10](这是应用数学论文和教
科书中鲜少提及的难言困惑)。为了简化随机
变量的描述,我们通常使用其均值和方差来
刻画一个概率密度函数的粗略特征(即平均
值和以平均值为中心的扩展程度)。我在此前
关于概率论的教程中已经解释了上述基础概
念(请阅读第一部分提到的五篇教程)。
在系统研究中,我们对所谓的输入输出
关系甚感兴趣。如果一个系统的输入是随机
的,那么输出也将是随机的。基于输入的概
率密度函数,我们希望了解输出的概率密度
函数。特别地,我们希望知道当 ( )fy x 且
给定 ( )p x 时 ( )p y 是什么样子。下面对公式(3’-4’)和(5)或(5’)在概率情形下进行
阐述。
(i) 传播方程。假设 1 1( , )k k kfx x w ,
这是公式(5)的非线性输入输出的推广。
那么,给定 1( )kp x 和 1( )kp w ,我们得到:
1 1 1( ) ( | ) ( )d ,k k k k kp p px x x x x (5’’)
这里,原则上在给定 ( )kp w 及关系式
1 1( , )k k kfx x w 的情况下, 1( | )k kp x x是可知的。
(ii) 更新方程。假设 ( , )k k khz x v ,这是
公式(1’)的非线性推广。于是根据贝叶斯
准则,公式(4)(或 4’ 或 4*)的概率表述为:
( | )( | ) ( ),
( )pp p
pz xx z x
z (4’’)
其中 ( )p x 是 x的所谓先验概率密度函数,
( | )p x z 是 x的后验概率密度函数,即在测
量 z条件下的x的概率。同样,已知 ( )kp v 和
关系式 ( , )k k khz x v , 我们可以原则上给
出 ( | )p z x 和 ( ) ( | )dp pz z x x。
注意,我们讲的是“原则上”与公式(4’’)
和(5’’)的关联。这里值得再一次强调应用
数学的难言之困惑[10],即在计算上基本不可
能处理一般的多变量方程。如果x, z,w及 v
都是n维向量的话,公式(4’’)和(5’’)看
似简单,实则难以计算。因此,我们寻求对

系统与控制纵横 2015年第1期62
于概率密度函数的参数化描述,以解决公式
(4”-5”)的计算上的困境。为此,我们引入
共轭概率密度函数或再生概率密度函数的概
念。例如, 如果公式(5’’)中的 和
满足高斯分布,那么公式(5’’)中
的 同样为高斯分布。进而,我们可
以用一个有限维方程表达公式(5’’),使后
验概率密度函数的参数与先验概率密度函数
相关联。实际上,如果 为高斯分布,
均值为 及方差为 ,且 和 通
过公式(5’)线性相关,那么对公式(3*-4*)
进行复杂的代数运算便可证明 同样
为高斯分布,并可知其均值和方差。同理,
我们可以证明公式(5)中的 和
亦为再生或共轭配对。如果 满足高斯分
布, 则 也是高斯分布,其先验均值
及方差与后验均值及方差通过公式(3*-4*)
相关联。换句话讲,卡尔曼滤波器仅仅是高
斯再生情形下对公式(4”-5”)的传播和更新
形式。在我们的心目中,可以构建一个关于
动态系统传播和更新的概率密度函数,如图
2所示。
2
在我 45 年前著的《应用最优化控制》
一书[9]第 12章中的第 322-328页,可以找到
一个比上图更为形象化的示意图。
总而言之,我们考虑的动态系统和观测
方程无法满足卡尔曼滤波严格的线性要求。
那么,如何处理公式(4’’-5’’)呢?一个显而
易见的方法是使用离散直方图(即抽样的离
散化)来逼近概率密度函数,进而实现公式
(4’’-5’’)。这就是所谓的粒子滤波——这一
方法的领军人物之一是雷神(Raytheon)公
司的 Fred Daum博士,他拥有超过 20年的实
践经验和众多成功案例。那么,什么是粒子
滤波呢?用一句话来说——试图通过抽取样
本(粒子)来传播和更新关于系统状态的多
维密度函数。当然,你是通过由状态向量的
实际样本组成的直方图来逼近多维密度函数
的。传播直方图(即组成直方图的粒子)计
算起来并不是那么复杂(想想看,只是针对
粒子运行蒙特卡洛计算)。但是,使用新的测
量来更新直方图就不那么容易了。首先,如
果状态维数很高,为了使直方图具有充分的
代表性,你需要指数量级的粒子数。这是应
用数学家不愿谈及的普遍性困惑[10]。更棘手
的是,更新方程中用到的贝叶斯准则要求先
验密度与似然函数相乘,而后者在实际测量
值附近会极速地下降。因此,只有一小部分
粒子会得到显著的更新。这种计算相当低效。
Daum 博士的专长和贡献在于,他发展了一
些技巧用于改善这一问题(他近期与 Huang
在一篇发表于 SPIE文集的文章中详细阐述了
他们最为成功的技术手段[11])。这一方法仍
然面临维度灾难这一局限。幸运的是,许多
实际问题只有 6个维度的状态向量(例如航
天制导和应用控制中的 3 个位置和 3 个速
度),这就减轻了计算负担。实际上,事后想
来,在我半个世纪前出版的那本教科书的第
381 页上的非线性滤波的例子,就是一个极
其简单(只有两个可能状态)的粒子滤波问
题。只不过,在大约 50 年前,粒子滤波这
一名词还没出现,所以书中没有标示。
综上所述,以下是就我所知道的有关滤
波或估计的全部概念的阐释:
1. 它只不过是以复杂精妙形式展现的
简单的最小二乘拟合,
2. 它的基础是有关概率密度函数的传
播和更新的两个简单的概率公式,
3. 卡尔曼滤波是上述 1或 2在线性系统
和(或)再生高斯概率密度函数中的具体运用。
根据听众和时间长短的不同,你可以任
选本文的某个部分来阐释卡尔曼滤波——
50 多年来系统控制领域的皇冠级成就和德
雷珀奖工作。
理论上讲,若想严格推导连续时间下的
非线性滤波方程,需要谨慎运用测度论这一
工程领域大多数人难以理解的工具。但是,
在实际应用中,由于使用数字计算机进行离
散时间的计算,测度论的知识变得不再必不
可少。我们虽然没有提及这些知识,但不能
掩盖了他们的理论贡献。
2015 No.1 All About Systems and Control 63
的是,更新方程中用到的贝叶斯准则要求先
验密度与似然函数相乘,而后者在实际测量
值附近会极速地下降。因此,只有一小部分
粒子会得到显著的更新。这种计算相当低效。
Daum 博士的专长和贡献在于,他发展了一
些技巧用于改善这一问题(他近期与 Huang
在一篇发表于 SPIE文集的文章中详细阐述了
他们最为成功的技术手段[11])。这一方法仍
然面临维度灾难这一局限。幸运的是,许多
实际问题只有 6个维度的状态向量(例如航
天制导和应用控制中的 3 个位置和 3 个速
度),这就减轻了计算负担。实际上,事后想
来,在我半个世纪前出版的那本教科书的第
381 页上的非线性滤波的例子,就是一个极
其简单(只有两个可能状态)的粒子滤波问
题。只不过,在大约 50 年前,粒子滤波这
一名词还没出现,所以书中没有标示。
综上所述,以下是就我所知道的有关滤
波或估计的全部概念的阐释:
1. 它只不过是以复杂精妙形式展现的
简单的最小二乘拟合,
2. 它的基础是有关概率密度函数的传
播和更新的两个简单的概率公式,
3. 卡尔曼滤波是上述 1或 2在线性系统
和(或)再生高斯概率密度函数中的具体运用。
根据听众和时间长短的不同,你可以任
选本文的某个部分来阐释卡尔曼滤波——
50 多年来系统控制领域的皇冠级成就和德
雷珀奖工作。
理论上讲,若想严格推导连续时间下的
非线性滤波方程,需要谨慎运用测度论这一
工程领域大多数人难以理解的工具。但是,
在实际应用中,由于使用数字计算机进行离
散时间的计算,测度论的知识变得不再必不
可少。我们虽然没有提及这些知识,但不能
掩盖了他们的理论贡献。
参考文献Ho Y C. Proximity to Fame (#2) - the 2008 Draper [1]
Prize. http://blog.sciencenet.cn/blog- 1565-14253.
html, 2008.
Ho Y C. A Short Course on Nonlinear Filtering. http://[2]
blog.sciencenet.cn/blog-1565-426323.html, 2008.
[3] Ho Y C. Probability and Stochastic Process [3]
Tutorial (1). http://blog.sciencenet.cn/blog- 1565-
664051.html, 2013.
Ho Y C. Probability and Stochastic Process Tutorial [4]
(2). http://blog.sciencenet.cn/blog- 1565-665359.
html, 2013.
Ho Y C. Probability and Stochastic Process Tutorial [5]
(3). http://blog.sciencenet.cn/blog- 1565-666599.
html, 2013.
Ho Y C. Probability and Stochastic Process Tutorial [6]
(4). http://blog.sciencenet.cn/blog- 1565-669532.
html, 2013.
Ho Y C. Probability and Stochastic Process Tutorial [7]
(5). http://blog.sciencenet.cn/blog- 1565-671318.
html, 2013.
Ho Y C & Lee R C K A. Bayesian approach to [8]
problems in stochastic estimation and control. IEEE
Trans. on Automatic Control, 1964, 9(Oct.):333-

系统与控制纵横 2015年第1期64
339.
Bryson A E & Ho Y C. Applied Optimal Control: [9]
Optimization, Estimation and Control. Taylor &
Francis, 1969.
Ho Y C. Some Dirty Secrets of Applied Mathematics. [10]
http://blog.sciencenet.cn/blog- 1565-26889.html,
2008.
Daum F & Huang J. How to avoid normalization of [11]
particle flow for nonlinear filters: Bayesian decisions
and transport. Proceedings of SPIE 2014.
Ho Y C. On stochastic approximation methods and [12]
optimal filtering. J. of Math. Anal. and Application ,
1963,6(1): 152-154.
Kalman R E , Ho Y C, & Narendra K.S. Controllability [13]
of linear dynamical systems. Contributions to Diff.
Equation , 1963,1(Interscience) :189-213.
Kalman R E. A new approach to linear filtering and [14]
prediction problems. Transactions of the ASME-
Journal of Basic Engineering, 1960,82 (Series D):
35-45.
Kalman R E. Discovery and invention: the newtonian [15]
revolution in system technology. Journal of Guidance
and Dynamics, 2003,26(6):1-7.
【作者简介】 何毓琦,先后于美国麻省理工学院和
哈佛大学接受了本科和研究生教育。40多年来,他
执教于哈佛大学并从事研究工作。他长期活跃在专业
领域:担任众多期刊的编委,是经典著作和文章的作
者,并且载誉无数。何毓琦教授是IEEE的终身会士和
美国国家工程院士,同时也是中国科学院和中国工程
院的外籍院士。自2001年10月以来,他兼职担任了清
华大学(中国北京)智能与网络化系统研究中心的首
席科学家与讲席教授。从2007年起,他开始在科学网
(中国)的博客上撰写文章,成为了该网站上很受欢
迎的博客作家。
2015 No.1 All About Systems and Control 65
专家论丛
还原论和系统论*
宋牮 中国工程院
系统论的创始人,奥裔美籍生物学家冯·贝
塔朗菲(Ludwig von Bertalanffy, 1901-1972)和钱
学森先生(1911-2009)都认为控制论、信息论、
运筹学、排队论、决策论、博弈论、系统工程等
都是系统论的组成部分。系统论是信息时代的旗
帜[1, 2]。
20世纪以来,人们已习惯把由众多元器件组
成的人造机器、工程或大自然造化的有机体、物
体称为系统。系统由分系统或子系统组成。由基
本组分的特性和相互作用去表述、演绎、归纳和
综合系统的功能和性质称为系统分析。媒体和哲
学家近谑称之为“决定性的还原论(Deterministic
Reductionism)”。分析和综合是历代哲学研究的
基本方法。姑且随俗简称分析——综合法为还原
论。 物体是分子、原子的组合体,思想是对客观
事物的观察、实验经验和理性思维的组合体。在
经典科学中,以分析——综合为中心的还原论的
规约是:对系统性质的描述都应该是实验证实了
的陈述;不与组分的性质矛盾;系统的运动规律
是子系统运动和相互作用的综合;故系统的性质
和运动规律都可以从子系统或组分的性质和相互
作用中得到科学解释[3]。
在上述意义下,牛顿力学是还原论的主板。
整个近代物理学都建筑在还原论基础之上。电动
力学完全建立在电磁现象实验观察之上。相对论
的主根是真空光速不变实验与引力和加速度等价
原理。统计力学和量子力学的出发点是牛顿力
学,支柱是电子、原子的波粒二象性实验。薛定
谔方程是决定性(还原论)的演变[4, 5]。钱学森先
生的专著《物理力学》充分阐明了气体热力学的
还原论渊源[6]。粒子物理以至新兴的弦论的出发点
也离不开经典力学的最小作用原理。
遗传基因DNA双螺旋结构的发现是20世纪生
物学的历史性成就,是由核酸分子非共价化学键
规则推知,用X光衍射证实的,与化学基础理论
和物理实验惬意相洽,是还原论的伟大胜利[7, 8] 。
微电子计算机的成功开辟了智能时代。当代
计算机科学依赖半导体集成电路微型芯片的开
发,归结到半导体物理、量子力学和工程师们对
晶体结构的精细操控。还原论主导着整个计算技
术的全过程。
数学为系统分析提供了基础和宏观结构。数
字仿真已成为自然科学和工程技术中不可替代的
实验装备。有数学家认为,数学是关于形与数的
科学,其宗旨有三:一是描述和研究客观世界,
二是面向主观思维,三是柏拉图式虚幻遐想。* 此为宋健近述《回忆录》中的一节

系统与控制纵横 2015年第1期66
获国家最高成就奖的当代杰出数学家吴文俊院士
断言,就上述前两部分而言,尽管适应于一切数
学问题的万能程序不可能有,大部分数学问题都
可以机械化。人工智能所应用的几何、代数、微
分方程、定理证明、逻辑推理、概率统计、大数
据搜索、感知识别、学习理解、设计规划等都可
以由智能机械化完成。旅美数学家王浩(1921-
2005)用计算机证明了怀特海和罗素名著《数学
原理》中数百个命题,开创了数学机械化的新
时代。吴文俊院士的研究展示了几何定理的证
明都可以高度机械化[8]。美国数学家K.Appel 和
W.Haken 于1976年用计算机证明了地图四色难
题。1991年5月和2003年1月两次人机象棋大战,
IBM的“深蓝”(Deep Blue)和“小深”(Deep
Junior)计算机先以2胜1负3平战胜国际象棋冠军
Gary Kasparov, 后以1胜1负4平言和,引起全世界
轰动。苟将下棋软件装到它的“脑袋”里,机器
人会下棋已无人怀疑。计算机是由加、减、乘、
除、比较和存储电路依序堆垒而成,每条指令的
执行都是由“原生”器件协同完成的,勿须还而
原。
进一步说,如果把经典物理、化学、数学、
技术经验都称为原理,那么今日之飞机、飞船、
火箭、舰船、高铁、大桥、电站、冰箱、手机等
都是还原论所赐之惠。300年前开始的产业革命,
100年前的电气化运动,50年前出现的自动化、信

2015 No.1 All About Systems and Control 67
息化热潮和医疗卫生保健事业
等,整个工业和工业后文明都
是在还原论旗帜下取得的伟大
成就。
美国理论物理学家,诺奖
获主史蒂芬·温伯格(Steven
Weinberg)在他新著《解读世
界 》 中 自 称 为 “ 广 义 还 原 论
者”,认为21世纪的科学研
究 仍 应 沿 着 伽 利 略 和 牛 顿 所
开拓的道路前行[9]。俄科学院
院士布恰陈柯(Bukhachenko
A.L.)最近呼吁:还原论是检
验真理的标准,凡与经典科学
原理和实验观察相悖的理论、
观点和技术都应小心对待。任
何新理论、新观点不应与已被
证实了的原理和实验矛盾。相
对论并不与牛顿力学矛盾,而
是延伸了它的范围。DNA的双
螺旋结构是化学基本定律的凯
旋[5]。
但是,历史无绝代,社会无终态,科学无止
境,真理无绝论。还原论,从现有知识和经验中
演绎归纳而来的规律可能不都是最后的绝对真
理。从牛顿的《自然科学的哲学原理》(1687)
算起,现代科学经历了仅约300年的历史,还资浅
年轻。人的视野有限,观察和实验手段受制,未
及穷窥万象,阅尽世态,积累的知识尚欠丰赡,
离看穿世界,理解万物仍很遥远。系统论者早
就觉察到,尽管经典科学技术已经取得了辉煌成
就,对文明进步和社会发展做出了伟大贡献,但
还是提出了四大质疑[1, 4, 7]。
第一,忽略了信息。经典力学、量子力学、
粒子物理等都以质量、动量、能量、电荷等基本
量为中心。在有机世界中,社会、生物的生存和
发展是靠物质、能量和信息三者驱动的。植物向
阳趋光,落叶御寒,动物冬眠春繁,觅食避灾,
组队成群,都靠信息。人造自动化系统,如航
空、航天、航海、电站、机器人,缺乏信息就不
可能运行。故系统论者近来把信息与物质、能量
并列为宇宙三基元。
第二,日常观察使人确信,系统有层次之
分。所有的复杂系统,人造的或天然的,都具有
等级层次结构。不同层次的性质、结构、功能各
异,控制规律抑扬不一。整体的功效行为常由子
系统相向加强,也可能与子层目标相逆。如花开
蒂落,秋叶飘零,为全局利益而局部牺牲。系统
论者认为,经典力学中缺乏系统要领,不足以描
述复杂系统高层次的运动规律,疑另有定律。即
使找到万物之理(Theory of Everything)也不可能
覆盖各层。未来学者A·托夫勒谑称,“我们最
善于拆零,常忘掉总体”,“总体大于子和”。
第三,生命的产生和行为是系统论者的参照
标杆。复杂系统中的新秩序是如何建立的是争论
的另一中心命题。经典物理断言,封闭系统中的
熵总在增加,秩序趋于混乱,那里没有发现形成
新秩序的机制。工程技术界相信,依靠还原论可
以创造新秩序,所有人造系统都井然有序就是铁
证。实验生物学家已订立合成生物计划,试图依
还原论为据人工合成生命,虽已取得初步成就,
人工合成了蛋白和DNA片段,能否合成生命,尚
无定论。达尔文认为,地球上高度有序的生物抑
或是35亿年前在混乱、混沌的环境中出现的。既
然组成生命的元素在地球上齐备,在适当的环境
中,如水塘、浅海、海底热泉边,生物分子可能
偶然聚合而涌现出生命。系统论者疑义存在一种
科学尚未认识的“自组织原理”,催化有机分子
系统与控制纵横 2015年第1期68
结合而肇始了生命。20世纪的进化生物学和分子
生物学认为已有充分证据表明,地球上包括人类
在内的千万种奇形异状的生物都是同源同宗,有
共同的祖先,盖由35亿年前的原核微生物逐步进
化而成。还有一批天文、生物学家,如英国天文
学家霍伊尔(F.Hoyle, 1915-2001),生物学家克
里克(F. Crick, 1916-2004)、温特(C. Venter)
等,怀疑最初的生命之源不是地球上的土产,既
不相信还原论能人造出生命,也不笃信大分子偶
然能聚合出生灵,那是概率极微弱的事件,姑且
把难题推给未知,可能是从外星飘来的“泛种
(Panspermia)”肇始了地球生物界[12]。
第四,经典力学描述的自然过程都是可逆过
程,时空反映对称。牛顿力学、电磁方程、相对
论、量子力学、粒子物理均然,这与热力学定律
失洽。达尔文深信,科学史也证明,一切随机事
件如冰期、热浪、天体碰撞、火山爆发对地球生
物进化有根本性影响。数学家们经过半世纪的艰
苦努力,捋清了布朗运动、鞅类、马尔可夫等典
型随机过程对扩散和可控过程的影响,证明了
所有随机过程的时序是不可逆的[13-19]。普里戈津
(Prigogin I.)认为,生命从混沌产生,生物进化
不可逆。时间不能倒流是经典物理与热力学和系
统论的分水岭[8]。覆水不能复收,堕甑不能再圆,
似水年华不再,史事一去无返,这是系统论的公
设,与还原论对峙。
系统论对还原论的挑战,方兴未艾,引发无
尽期冀。然而,有一命题可深信不疑:系统论苟
有突破,必定是开放的,包容的。现代科学的工
具箱箧,丰富多彩。观测、实验、分析、综合、
演绎、归纳、假说、求证,都是利器,分际适
用;高维、低维、史实、进化、分形、显微悉备
时空舞台;分解还原,整体抽象各有所长。曷益
悲花怜月,贬褒桃李。

2015 No.1 All About Systems and Control 69
【作者简介】宋健(笔名宋牮),控制论、系统工程和
航空航天技术专家。1960年毕业于莫斯科包曼高等工
学院研究生院,先后获副博士和科学博士学位。曾任国
家科委主任、国务委员、国家科教领导小组副主任、中
国工程院院长、全国政协副主席等职。现任中国工程院
主席团名誉主席、中华环保联合会主席。
中国科学院和中国工程院两院院士;俄罗斯科学
院、美国国家工程院、瑞典皇家工程科学院、南斯拉夫
工程院外籍院士;墨西哥国家工程院、阿根廷国家工程
院通讯院士;国际宇航科学院院士。
在控制论研究、航天技术和人口控制论三方面做出了
系统的、创造性的成就和贡献。建立了最优控制场论,
完整地解决了线性系统的最速系统的综合理论;首创人
口控制论新交叉学科,研究建立了人口控制模型,发
现和证明了“人口生育双向极限定律”;发起并主持了
面向农村的“星火计划”和发展高技术产业的“火炬计
划”;组织实施了“863计划”;发起了“夏商周断代
工程”;为推动中国科学事业发展及确立“科教兴国”
战略作出了重大贡献。
曾获国家科学大会奖、国家自然科学成就奖、国家
科技进步一等奖、香港“何梁何利科技成就奖”以及国
际数学模型协会艾尔伯特·爱因斯坦奖、意大利雷昂纳
多·达芬奇奖等多个国内外重要奖项。
2014年10月8日,国际小行星命名委员会批准,将
中国科学院紫金山天文台2007年8月16日发现的国际编
号为210210号小行星正式命名为“宋健星”。
参考文献冯·贝塔朗菲. 一般系统论. 魏宏森等译. 清华大学出[1]
版社,1987.
钱学森. 论系统工程. 湖南科技出版社,1982.[2]
英大百科. 中文版,卷4,1985.[3]
普利戈津. 从混沌到有序. 曾庆宏、沈小峰译,上海[4]
译文出版社,1984.
Bukhachenko A.L. (院士). 还原论--检验真理的标[5]
准. 俄罗斯科学院通报(俄文),卷83, 第12期,
2013.
钱学森. 物理力学讲义. 科学出版社,1962.[6]
Maxwell N. The Comprehensibility of the Universe. [7]
Clarendon Press·Oxford, 2003.
吴文俊. 计算机时代的脑力劳动机械化与科技现代[8]
化. 见蔡自兴、徐光佑著《人工智能及其应用》一书
的代序. 清华大学出版社,2004.
Steven Weinberg. Lake Views—This world and [9]
Universe. Belknap Press of Harvard University, 2011.
吴杰. 系统哲学. 人民出版社,2008.[10]
李喜先等著. 科学系统论. 科学出版社,1995[11]
Venter Craig. What We Believe But Cannot Prove. Edit. [12]
J Brockman, Harper Perennial, 2006.
Wiener N. Differential Space. J. Math. Phys. 1923, 3: [13]
131-174.
Wiener N. Un Probleme de Probabilities Denombrables. [14]
Bull. Sos. Math. France, 1924, 52: 569-578.
Kolmogorov, A.N. Uber die Analytischen Metoden in [15]
der Wahrscheinlich-Keitsrehnung. Math. Ann, 1931,
104: 415-458.
Ito K. Stochastic Intgral. Proce Imp. Acad. Tokyo 20, [16]
519-524, 1944.
Chen H.F.(陈翰馥)、Guo L(郭雷). Identification [17]
and Stochastic Adaptive Control. Birkhauser, 1991.
候振挺、郭先平. 马尔可夫决策过程. 湖南科技出版[18]
社,1997.
Yong Jiongmin(雍炯敏) and Zhou XY(周迅宇). [19]
Stochastic Control. Springer, 1999.
系统与控制纵横 2015年第1期70
信息时代反馈机理的演化进展
反馈是控制论的一个关键机理。自然界里,
反馈、自学习、自适应、自调节是众多生物系统
发展进化的推动机制。作为一个理论系统的发
展,1948年以反馈机理为基础的“Cybernetics”
( 通 常 译 为 “ 控 制 论 ” ) 在 诺 伯 特 · 维 纳
(Norbert Wiener)的名著《控制论:关于在动
物或机器中控制或通讯的科学》 [1]中被首次明确
提出。维纳的“控制论”是在广义上定位的,其
范围涉及物理、生物、神经、天体、智能、计算
机。就应用领域而言,涵盖确定性及随机性系
统,从简单的机械反馈结构,基本的电路及电子
系统,天体有规律的调节、变化,直到生物,医
学,感知系统对环境反馈引
入的适应性进化等等。从方
法论角度,它强调系统间信
息的通讯、关联、协调,以
及自学习、自适应功能。而
这些功能的实现均依赖于信
息的提取、传输、处理,和
决策的反馈途径。
在 此 后 十 多 年 的 发 展
中,反馈机制逐步被人们所
接受。 当1961年维纳的“控制论”专著再版时,
反馈机理已成共识且反馈控制理论的一些基本框
架也已成型。此后,广义“控制论”的发展逐渐
集中于反馈控制数学理论的发展。
由 于 中 文 翻 译 选 择 了 “ 控 制 论 ” ,
“Cybernetics”的深广原意渐渐淡化。现在“控
制论”大概总会被翻译成“Control Theory”, 且
常常狭义地想到“反馈系统自动控制的数学理
论”。另外,计算机、通讯、网络系统突飞猛
进的发展也将“Cybernetics”从名词“控制论”
变成了形容词“赛博”,意为“与计算机网络
及信息技术相关的”(甚至把“控制”都拿掉
王乐一 美国韦恩州立大学
赵 平 中国济南大学
专家论丛

2015 No.1 All About Systems and Control 71
了!)。
我们讲到信息时代,也许大家就会想到近十
多年来互联网导致的信息革命。但实际上,维
纳“控制论”时代本来就是一个信息时代。维
纳“控制论”的酝酿发展是和冯·诺依曼(John
von Neumann)的计算机理论[2,3],香农(Claude
Elwood Shannon)的信息论[4,5]的发展合作同步
的,并与当时生物系统、神经生理、人工智能的
进展密切相关。不过,当年的信息时代是以一批
科学界精英的思维实验为特征的,而今天的信息
时代已是信息无处不在了。
1.反馈控制理论的早期发展
反馈控制系统是基于“负反馈”的基本结
构。直观上讲,反馈系统的控制器根据被控制量
与控制目标的误差来对控制手段进行调节,使被
控制量向控制目标逼近。举例来说,早期蒸汽机
的飞轮调速控制就是根据实际转速与标定转速的
差异来调节蒸汽流量,最终使转速稳定在标定转
速的附近。这个简单的增益控
制系统至今仍在电网发电机调
频中应用。日常生活中,淋浴
水 温 的 调 节 也 是 基 于 反 馈 控
制,人以皮肤作为传感器来测
量水温,并以此为依据来调节
冷热水流量,从而达到个人喜
欢的水温。
尽管上述的反馈机理直观上看是正确的,但
其对系统的干涉与调节也可能是“成事不足,败
事有余”。比如,一个初学开车者上了大路,车
行方向稍有偏差,就猛转方向盘,结果车就撞上
街沿了。
因此,只有合理地设计反馈控制器才会达到
预期的效果。早期,反馈控制器的结构很简单,
设计过程也比较直观,它们不求优化,但求可
靠。用现在的术语来讲就是追求闭环系统的鲁棒
性。这样的控制器对控制对象的模型精度要求不
高,能包容不同类型的系统(线性系统、非线性
系统、时变系统)及系统不确定性。由手动控制
经验引入的“PID”控制器经历了
时间的考验,至今仍然主导工业
过程、交通工具、医疗仪器、家
用设备的控制应用。
从这些直观的理解和设计方
法起步,反馈理论的深入发展是
控制理论进步的主要标志。与PID
控制应用同期的理论发展,十分
注重系统面对不确定环境的可靠性。我们可以注
意到20世纪60年代前后反馈理论的发展总是和
“鲁棒性”相关,尽管“鲁棒性”一词是很久以
后才引入控制领域的。当年反馈理论的研究致力
于一些非常本质的问题:反馈系统的数学描述必
须满足哪些条件?在什么条件下反馈系统才能保

系统与控制纵横 2015年第1期72
证稳定?反馈系统有多少稳定裕度?其中,“必
须”、“保证”、“裕度”就直接含有“鲁棒”
的意义。
比如,伯德(Hendrik Wade Bode)20世纪在
30-40年代发明了反馈系统的频域方法。他在伯德
图上所引入的反馈系统的增益余量和相位余量[6],
显然就是鲁棒控制的前身。后来,George Zames
(在1960年前,他是维纳和李郁荣在麻省理工学
院的博士生)在20世纪60年代初提出的小增益定
理 (Small Gain Theorem)和扇区判据(Sector
Criterion),成了早期鲁棒控制的奠基性成果[7]。
2.反馈控制理论的分支细化
自20世纪60年代之后,反馈理论的发展开始
细化、分块、深入、数学化。在此后的50多年
间,控制理论有了长足的发展,其代表性的进展
包括60-70年代的最优控制、计算机控制,70-80
年代的鲁棒控制、自适应控制、随机控制、非线
性控制、模糊控制、系统辨识、状态估计,等
等。此外,对反馈的能力及极限也有了进一步的
理解。尽管都以反馈控制为目的,但系统的建
模、辨识、估计、稳定性、优化等分支日趋专业
化。

2015 No.1 All About Systems and Control 73
控制理论分支的深入数学化也令其变得高
深、难学,给人以望而却步的印象。但实际上这
些分支探讨的问题和基本思想还是比较浅显的。
例如,排在“衣食住行”首位的“衣”就可作为
控制方法应用的范例。
对服装行业来说,衣服是要设计的“控制
器”,而“控制对象”是高矮不一、胖瘦不同、
体型不齐的人群。所以“对象复杂性”很高。为
了减少“系统复杂性”,服装行业引入有限个
标准化的“对象模型”,并以专用码(大号,
10M,7W,等等)对其编号(“模型结构与参
数”),在此基础上做出假体模具(不考虑巴黎
时装展上的真人模特)。当然,模型只是一种
“近似”,这自然引入“模型误差”。大多数人
会有偏差(“不确定性”)。这就要求按假体模
具设计的衣服有一定的容余量(“稳定余量”或
“鲁棒性”)。
这里存在“模型精度”与“模型复杂性”的
权衡问题。若要更精确地应对人体的不同,必然
需要更多的模型,从而会增加衣服设计的复杂性
和费用。这是控制方法中的“复杂性理论”。
“鲁棒性”强的衣服(“控制器”)可以达
到以不变应万变的效果。比如“文革”中的毛式
中山装几亿人穿,再加上号码偏大以保证可以
多年不换,这可能是“鲁棒性”最强的“控制
器”了。但对衣服比较挑剔的,大多数还是采取
“自适应控制”原理。这其中又分为两大策略:
第一种是先测量身高体宽(“系统辨识和参数估
计”),然后以此为据来挑衣服(“控制器自适
应”)。因为有系统辨识作为中间步骤,这是
“间接型的自适应控制”。第二种是不量身高体
宽,直接试衣,这是“直接型的自适应控制”。
试衣后的困难往往是犹豫不决,大号、中号
都不是完美选择。此时可用的控制策略有三种。
“最优控制” 策略是挑衣服与人体之间误差最小
的。“随机最优控制” 策略是根据现场心情挑
衣服,当然这结果有随机性。当时觉得是最佳选
择,一旦回家后心情变了,就会造成退货。“模
糊控制” 策略先对每种选择加个权(“绝对不挑
小号”、“50%程度可选中号”、“70%感觉可
选大号”,等等),经综合后作出决定。当然,
最好的衣服只能量体裁衣专门缝制了。这大概算
是“自适应控制”里最花钱的策略了。
讲到这里,我们还要对“模型”再解释几
句。服装设计师用的假体模具是控制里讲的“成
比例的实体模型”。当我们用一组数据来定义人
的体型,那是“数学模型”。现在用计算机三维
图像来做服装设计,是控制里的“计算机模拟试
验”。但设计的服装是否真好,还要真人试试,
也就是控制里的“实验验证”。
3.随机系统与确定性系统之争
2 0 世 纪 8 0 - 9 0 年 代 , 确 定 性 系 统
(deterministic system)与随机系统(stochastic
system) 相互纠结,曾经有一段并行运作的时期。
确定性系统是鲁棒控制研究的主体,其系统或信
号的不确定性(uncertainty)可用一个集合来描述。
控制的鲁棒性要求设计的系统对于集合中“所有
的系统或信号”都能稳定并满足性能指标要求。
而对于这“100%”的鲁棒性要求,从随机系统角
度看就实在太保守了。随机系统的主要特点是:
(1)小概率事件的重要性是相对可以忽略的;
(2)系统与信号的主体统计特性可以用适当意
义上的“平均”特性来替代。反过来说,假如一
个实际系统的动态特征并非随时间随机变化,那
么它的出现并无机会及概率可言。从这个意义上
讲,如果一个控制器不能保证(100%)鲁棒的
话,对某个系统来说控制器的设计可能就是100%
失败的。谁能接受一个飞机控制系统有1%的概率

系统与控制纵横 2015年第1期74
出错呢?
那么确定性与随机性是否有关联呢?可以肯
定地说,它们是紧密相关的。举一个例子来说,
日本地震很多,自然建筑防震要求至关重要。用
鲁棒性要求来说,就是建筑质量必须100%承受7
级地震。按随机指标,则要求抗震成功率需达到
99%。如果某一地区7级以上地震的概率是1%,
那么这两个指标是一样的。换言之,对实际系统
而言,由于人们对一个系统了解的不完善,任何
一个“鲁棒设计”都有失败的风险。而一个随机
现象的分布和概率意义上的性能指标经常对应了
一个“鲁棒设计”的稳定与性能界限。
20世纪80-90年代这两个学派间的一些纠结,
从今天的网络系统角度来看,实际上变成了相辅
相成的方法。
4. 信息时代对反馈系统理论的新挑战
近十多年来,新型系统层出不穷,交通、能
源、医学、社会系统的发展使得系统的概念发生
了实质性的跳变。从互联网到云计算和物联网
(Interne of Things),从网络控制到大数据,从
新能源到智能电网,从量子控制到大规模的经
济、基因、生物系统,都在驱动控制论向新的深
度和广度发展。控制论不可避免地必须打破单个
或 小 群 体 反 馈 结 构 下 的 稳
定 、 鲁 棒 、 优 化 控 制 的 框
架,而归元并强化到信息、
网 络 、 通 信 、 计 算 、 控 制
一体化的研究上去。之所以
称为“归元”,因为这一体
化 的 思 想 本 来 就 是 维 纳 、
冯 · 诺 依 曼 、 香 农 的 主 体
思想和“Cybernetics”的初
衷。“强化”是因为理论、
系统、应用的发展已远远超
过20世纪60年代的环境了。从这个意义上讲,
也许“Cybernetics”应该有一个更适合的、超越
“控制论”的翻译。当然,这只能由真正的“控
制论”专家来考虑了。
信息时代确实对控制的发展和创新提出了相
当严峻的挑战。传统反馈系统对信息交流要求连
贯、同步、可靠、完整。而信息时代的网络系统
打破了这种框架下的所有特点。在此罗列几个控
制发展需要尽快突破的关键难点。
(一)通信系统是网络系统重要的子系统,
通讯系统中信号的传递是随机的。当把一个基本
上是确定性的控制对象与通信系统连接,随机性
随即被引入到系统中来。就现今的无线通信而
言,由通信能量、带宽、信道干扰引入的不确定
性主要由数据丢包、时滞、数据传输速率等引
起。而这些都是随机现象。一个通信系统在传输
一个信号前,首先要对其进行编码。信息码主要
包括三个部分:网络地址、数据、 纠错码。其中
的纠错码使接收方以高概率判断出传输出错。收
到的信号可能是: ( 传 输 正 确 ) ;
(传输正确但有随机时延);掉包
(传输失败);误判造成的错码(小概率大误差
事件)。由此,通信系统会对控制系统带来哪些

2015 No.1 All About Systems and Control 75
变化呢?
(1)噪音的类型变了。传统的噪音模型是叠
加型的: 。噪音一般是零均值,
可相关,但方差有限的。在传统噪音统计特性基
础上发展出了维纳滤波[8]、卡尔曼滤波[9]、随机
微分方程、随机最优控制、灵敏度优化等研究方
法。这些方法的共同特点是在某种意义上对信号
取平均。但通信系统的模式却改变了这一基本假
设。这种不确定性的模式不能直接用信号平均的
方法来处理。
(2)信号接收到的时间由确定的变为随机
的。传统的离散系统是建立在均时采样基础上
的。当采样点随机出现时,包括系统建模、系统
辨识、状态估计、反馈控制、最优控制在内的传
统控制设计方法必须更新。当采样周期不固定
时,定常系统采样后就成了时变系统,可控可观
的系统可能成了不可控或不可观的,可辨识的系
统可能成了不可辨识的,稳定的系统可能成了不
稳定的,等等。由于这些变化,一大批建立在线
性定常系统上强有力的控制算法都不能直接使用
了,比如最优控制中的线性二次型算法、鲁棒控
制中的H ∞,L 1和μ 算法、系统辨
识中的线性最小二乘法、维纳滤波
等。
(二)网络系统中不同信道的
信息是随机非同步传输的,网络中
的控制子系统通常是非同步运行
的。而传统多变量系统的控制、稳
定性分析、性能指标优化多以同步
运行为基本要求。若把随机信道考
虑进去,网络系统的可控、可观、
可辨识性以及控制算法都需重新研
究。
(三)网络系统中的信息数量
巨大,分布不均,类型多样,变化
迅速。信息的实时传输共享必须考虑有限通信资
源的耗费。怎样提取有用信息,压缩数据,限用
局部信息来减少信息传输对计算机网络的压力早
已是计算机领域的核心问题。目前,已有大量的
有效算法,并形成了“大数据”研究领域。但对
反馈控制仍然是新的挑战。具体来讲,传统控制
算法绝大部分是集中型的。而分布式网络控制的
关键是分布式、多机、非同步、并行、模块式控
制算法的发展。只有解决控制算法模块化和非同
步协调问题才能使反馈机理与计算机网络发展接
轨,实现控制算法的分布式云计算、数据共享和
交叉复用。
5. 结束语
反馈机理在新的信息时代将会有更深入、
更广泛的突破。近年提出的“Cyber-Physical
Systems”(CPS,常译为“信息物理系统”)
概念就将“反馈”作为系统间互联的一个核心因
素。
在一个CPS系统里,物理子系统内有传统意
义下的控制反馈,子系统间有信息交流的协调
系统与控制纵横 2015年第1期76
【作者简介】 王乐一,IEEE Fellow, 1990年毕业于加
拿大蒙特利尔麦吉尔大学,获电气工程专业博士学位。
自1990年起,任教于密歇根州底特律韦恩州立大学,
目前为该校电气与计算机工程系教授,博士生导师。
他的主要研究领域包括系统复杂性、系统辨识、鲁棒控
制、 最优化、时变系统、自适应系统、混杂和非线性
系统、信息处理以及控制方法在医疗、汽车、通信、电
力系统和计算机等方面的应用。他曾是多个国际会议的
大会发言人,曾任IFAC模型、辨识和信号处理技术委
员会委员,IEEE Transactions on Automatic Control、
Journal of Control Theory and Applications,Journal
of System Sciences and Complexity等多个刊物的副主
编。1996年为美国密歇根大学访问教授,2009、2013
年为澳大利亚西悉尼大学访问教授。目前为中科院数学
与系统科学研究院核心国际专家小组成员和北京交通大
学引智工程外国专家。
参考文献W i e n e r N . C y b e r n e t i c s , o r , C o n t r o l a n d [1]
Communication in the Animal and the Machine.
Paris:(Hermann & Cie) & Camb. Mass. (MIT
Press),1948 2nd Ed, 1961.
van Newmann J. First Draft of a Report on the [2]
EDVAC, 1945.
Taub A H, ed. Collected Works of John von Neumann. [3]
Pergamon Press, 1963.
S h a n n o n C E . A m a t h e m a t i c a l t h e o r y o f [4]
communication. Bell System Technical Journal, 1948,
27:379-423 and 623-656.
Shannon C E. Communication in the presence of noise, [5]
Proc. Institute of Radio Engineers. 1949,37(1):10-
21.
Bode H W. Network Analysis and Feedback Amplifier [6]
Design. Van Nostrand,1945.
Zames G. Nonlinear operators for systems analysis. [7]
Sc.D. dissertation, MIT, Cambridge,1960.
Wiener N. Extrapolation, Interpolation, and Smoothing [8]
of Stationary Time Series. New York: Wiley,1949.
Kalman R E. A new approach to linear filtering and [9]
prediction problems. Journal of Basic Engineering.
1960,82:35-45. 【作者简介】 赵平, 2005年毕业于曲阜师范大学,获
数学与应用数学专业硕士学位,2008年毕业于中科院
数学与系统科学研究院,获系统理论专业博士学位。自
2008年起任教于济南大学,目前为该校自动化与电气
工程学院副教授,硕士生导师。他的主要研究领域包括
非线性控制、混杂系统、采样控制系统、时滞系统、随
机控制、鲁棒控制等。
反馈,控制系统与通信系统间有性能指标合作的
反馈,子系统与全局系统有信息结构的反馈,系
统资源的管理有系统复杂性与系统性能和可靠性
间的反馈。反馈控制在传统意义下是一个相当成
熟、已过中年的领域,而在新的CPS框架下仍是学
步儿童,前途无量。
系统理论揭示鸟群形成之谜
天空中整齐划一飞行的鸟群,它们的集
体运动仿佛是经过精心编排过的舞蹈。图 1
展示了迁徙中的八哥鸟美丽的群体行为。列
队群体运动中的鸟似乎都确切知道在何时、
何处改变方向才能使鸟群凝聚力的耗散达到
充分小,使整个群体的运动流畅且不至于分
裂,使一些鸟因脱离群体而受到天敌威胁。
为更好认识各种生物、人群及其他移动体的
群体行为,研究者们长期以来用各种理论和
实验的方法系统地揭示了群体行为中个体运
动的规律、复杂性、多样性及其中的奥秘。
1.
( Fayez Nureldine)
什么是个体呢?Wooldridge 与 Jennings
在 1995年给出了如下定义:考虑计算机系统
的某个环境,个体是该系统中有能力通过自
主运动实现特定目标的元素。一般来说,每
个个体在追求自己的目标时产生输出,该输
出通常能影响环境,但不能完全控制环境。
多个体系统是某个特定环境中的大量个体通
过相互作用组成的一个整体。多个体系统是
复杂系统研究的一个重要切入点,它可以用
于解决单个个体或单个系统难以解决的问
题。多个体系统通常具有一定的智能。过去
二十年,多个体系统理论及其应用得到了迅
猛发展。我们以鸟群为例,简要介绍多个体
系统的相关进展。
1987 年,Reynolds 在计算机图形学会议
ACM SIGGRAPH Computer Graphics上提出
了第一个模拟鸟群的计算模型—— Boid 模
型。Boid这个单词的本意是笨鸟,该模型假
设每只鸟的行为服从如下三个基本原则[1]:
1. 排斥:避免与相邻的个体发生碰撞;
2. 速度匹配:尽量与相邻的个体保持速
度上的同步;
3. 聚集:尽量与相邻的个体靠近,避免
孤立。

2015 No.1 All About Systems and Control 77
系统理论揭示鸟群形成之谜
天空中整齐划一飞行的鸟群,它们的集
体运动仿佛是经过精心编排过的舞蹈。图 1
展示了迁徙中的八哥鸟美丽的群体行为。列
队群体运动中的鸟似乎都确切知道在何时、
何处改变方向才能使鸟群凝聚力的耗散达到
充分小,使整个群体的运动流畅且不至于分
裂,使一些鸟因脱离群体而受到天敌威胁。
为更好认识各种生物、人群及其他移动体的
群体行为,研究者们长期以来用各种理论和
实验的方法系统地揭示了群体行为中个体运
动的规律、复杂性、多样性及其中的奥秘。
1.
( Fayez Nureldine)
什么是个体呢?Wooldridge 与 Jennings
在 1995年给出了如下定义:考虑计算机系统
的某个环境,个体是该系统中有能力通过自
主运动实现特定目标的元素。一般来说,每
个个体在追求自己的目标时产生输出,该输
出通常能影响环境,但不能完全控制环境。
多个体系统是某个特定环境中的大量个体通
过相互作用组成的一个整体。多个体系统是
复杂系统研究的一个重要切入点,它可以用
于解决单个个体或单个系统难以解决的问
题。多个体系统通常具有一定的智能。过去
二十年,多个体系统理论及其应用得到了迅
猛发展。我们以鸟群为例,简要介绍多个体
系统的相关进展。
1987 年,Reynolds 在计算机图形学会议
ACM SIGGRAPH Computer Graphics上提出
了第一个模拟鸟群的计算模型—— Boid 模
型。Boid这个单词的本意是笨鸟,该模型假
设每只鸟的行为服从如下三个基本原则[1]:
1. 排斥:避免与相邻的个体发生碰撞;
2. 速度匹配:尽量与相邻的个体保持速
度上的同步;
3. 聚集:尽量与相邻的个体靠近,避免
孤立。
漫谈系统与控制

系统与控制纵横 2015年第1期78
(a)排斥 (b)速度匹配
(c)聚集
2. (Boid) (1)
(2)
(3)
在这篇开创性论文中,个体的初始速度
和方向是随机的,个体的运动方向取决于个
体的位置及邻居的方向,且群体运动可以在
没有领导者的情况下发生。Boid模型来源于
对自然生物群体运动的观察,可以用以解释
群体运动中的聚集、同步以及旋转运动等现
象。Boid模型还可用于解释上述现象之间的
本质联系,在鸟群行为研究中具有基本的重
要性。
2001年,Reynolds创建了多个体系统群
体运动的网站:
http://www.red3d.com/cwr/boids/
该网站提供各种群体运动研究所需的资料,
包括源代码、演示(Demo)、可视化(视频)
及相关文献。
Biod 模型为鸟群群体行为的研究提供
了一个很好的计算机模拟框架,但是由于该
模型太复杂而不便于定量分析。1995 年,
Vicsek等人提出了一个简单的鸟群集群行为
运动模型——Vicsek模型[2]。尽管 Vicsek模
型最初的目的是用于刻画自驱式粒子系统的
群体行为,但也可以用于描述鸟群的群体行
为。由于 Vicsek模型比较简单,所以在过去
二十年引起了广泛的理论研究。
Vicsek模型的基本假设如下:
1)个体邻居是以该个体为中心,半径为
r的的圆形区域内所有的个体;2)更新规则:个体速度大小不变,速度
方向为自身及其所有邻居速度方向的平均,
其中 为随机噪声,第 i只鸟在 1t 时刻
的速度方向 )1(ti 的更新规则为:
)(
)(
)(cos
)(sinarctan)1(
tNjj
tNjj
i
i
i
t
tt
这里 )(tNi 是第 i只鸟在 t时刻所有邻居的
集合。
第 i只鸟在 1t 时刻的位置 )1(txi 的
更新规则为:
ttvtxtx iii )()()1( 。
Vicsek模型由于形式简单,不但可以用
平均场理论来进行一系列统计量的研究,而
且还可以用系统理论及非线性动力学的方法
来进行一系列深入的动态行为研究。2003
年,Jadbabaie等人给出了鸟群速度同步的一
个基本判据[3]。具体而言,如果把鸟群的运
动时间分割成一个有界无穷时间区间序列,
使得每个时间区间内鸟的邻居关系图是联合
连通的,则鸟群运动速度最终能达到同步。
2007 年,Tang 和 Guo 克服上述联合联通性
这一本质困难,给出了随机框架下鸟群速度
同步的基本判据[4]。具体而言,假设 n只鸟的鸟群的初始位置和初始速度服在给定范围
内服从独立均匀分布,则对任意给定的初始
速度和邻居半径,当n充分大时,鸟群速度
同步概率大于 )(16log/ nnnO 。
在原始的 Boid 模型和 Vicsek 模型中,
所有个体在鸟群中的地位都是相等的,并且
每个个体只能从邻居个体中获取信息。然而,
我们生活中真实的动物群体行为并非如此。
众所皆知,蚁群中有工蚁、兵蚁和蚁后等不
同的角色。例如,蚁群迁徙中不同的蚂蚁扮
演着不同的角色。鸟群的群体行为亦是如此。
因此,我们有必要研究不同个体在群体行为
中扮演的不同角色,发挥的不同作用。
考虑飞行中鸟群的角色分工,最简单的
如领导者-追随者模型。2005 年,Couzin 等
人首次提出了群体运动中领导者涌现的规
则。假定系统中只有少数个体知道运动方向,
其他个体并不知道谁是领导者,整个群体能
够在不改变系统原有局部规则的前提下实现
预期的群体行为[5]。
众所周知,研究鸟群群体行为的有效方
式之一是获得个体运动的高精度时空位置信
息,但由于技术难度很大,早期缺乏相关的
远程监测数据。因此,鸟群运动中通信机制
的奥秘始终无法揭开。近年来,由于导航与
通信技术的发展,很多学者借助高精度 GPS追踪器对鸟群的通信行为进行了系统深入的
研究。
1995 年,Biro 等人利用高精度 GPS 追
踪器深入研究了两只家鸽的飞行状况[6]。他
们发现:当两只鸟的偏好飞行方向不同且差
别较小时,两只鸟的实际飞行方向会折衷并
达到一致;然而,当它们的偏好飞行方向差
别超过一定的阈值,则两只鸟分别成为领导
者和追随者。
2008年,Dell’Ariccia等人通过在训练有
素的家鸽身上配备高精度的 GPS 数据记录
器来获取家鸽运动的时空信息,从而深入研
究飞行中鸟群的通信效率。他们发现:家鸽
群体飞行比家鸽单独飞行具有显著的生存优
势[7]。
鸟群的分工不是简单地把一群鸟分成领
导者和追随者两类,领导者和追随者之间的
关系可能更加复杂。2010 年,Nagy 等人通
过高精度、便携式 GPS追踪器获取家鸽运动
的时空信息[8],并深入探讨了家鸽运动的规
律。具体而言,他们利用个体方向选择的时
间先后顺序,深入分析了不同个体之间的相
互作用数据,并发现了以下规律:i)群体中
个体之间存在着明确的层次结构(图 3);ii)
鸽群中个体的位置与它的层次地位存在着强
相关性;iii)家鸽对信号的反应主要通过左眼

2015 No.1 All About Systems and Control 79
(a)排斥 (b)速度匹配
(c)聚集
2. (Boid) (1)
(2)
(3)
在这篇开创性论文中,个体的初始速度
和方向是随机的,个体的运动方向取决于个
体的位置及邻居的方向,且群体运动可以在
没有领导者的情况下发生。Boid模型来源于
对自然生物群体运动的观察,可以用以解释
群体运动中的聚集、同步以及旋转运动等现
象。Boid模型还可用于解释上述现象之间的
本质联系,在鸟群行为研究中具有基本的重
要性。
2001年,Reynolds创建了多个体系统群
体运动的网站:
http://www.red3d.com/cwr/boids/
该网站提供各种群体运动研究所需的资料,
包括源代码、演示(Demo)、可视化(视频)
及相关文献。
Biod 模型为鸟群群体行为的研究提供
了一个很好的计算机模拟框架,但是由于该
模型太复杂而不便于定量分析。1995 年,
Vicsek等人提出了一个简单的鸟群集群行为
运动模型——Vicsek模型[2]。尽管 Vicsek模
型最初的目的是用于刻画自驱式粒子系统的
群体行为,但也可以用于描述鸟群的群体行
为。由于 Vicsek模型比较简单,所以在过去
二十年引起了广泛的理论研究。
Vicsek模型的基本假设如下:
1)个体邻居是以该个体为中心,半径为
r的的圆形区域内所有的个体;2)更新规则:个体速度大小不变,速度
方向为自身及其所有邻居速度方向的平均,
其中 为随机噪声,第 i只鸟在 1t 时刻
的速度方向 )1(ti 的更新规则为:
)(
)(
)(cos
)(sinarctan)1(
tNjj
tNjj
i
i
i
t
tt
这里 )(tNi 是第 i只鸟在 t时刻所有邻居的
集合。
第 i只鸟在 1t 时刻的位置 )1(txi 的
更新规则为:
ttvtxtx iii )()()1( 。
Vicsek模型由于形式简单,不但可以用
平均场理论来进行一系列统计量的研究,而
且还可以用系统理论及非线性动力学的方法
来进行一系列深入的动态行为研究。2003
年,Jadbabaie等人给出了鸟群速度同步的一
个基本判据[3]。具体而言,如果把鸟群的运
动时间分割成一个有界无穷时间区间序列,
使得每个时间区间内鸟的邻居关系图是联合
连通的,则鸟群运动速度最终能达到同步。
2007 年,Tang 和 Guo 克服上述联合联通性
这一本质困难,给出了随机框架下鸟群速度
同步的基本判据[4]。具体而言,假设 n只鸟的鸟群的初始位置和初始速度服在给定范围
内服从独立均匀分布,则对任意给定的初始
速度和邻居半径,当n充分大时,鸟群速度
同步概率大于 )(16log/ nnnO 。
在原始的 Boid 模型和 Vicsek 模型中,
所有个体在鸟群中的地位都是相等的,并且
每个个体只能从邻居个体中获取信息。然而,
我们生活中真实的动物群体行为并非如此。
众所皆知,蚁群中有工蚁、兵蚁和蚁后等不
同的角色。例如,蚁群迁徙中不同的蚂蚁扮
演着不同的角色。鸟群的群体行为亦是如此。
因此,我们有必要研究不同个体在群体行为
中扮演的不同角色,发挥的不同作用。
考虑飞行中鸟群的角色分工,最简单的
如领导者-追随者模型。2005 年,Couzin 等
人首次提出了群体运动中领导者涌现的规
则。假定系统中只有少数个体知道运动方向,
其他个体并不知道谁是领导者,整个群体能
够在不改变系统原有局部规则的前提下实现
预期的群体行为[5]。
众所周知,研究鸟群群体行为的有效方
式之一是获得个体运动的高精度时空位置信
息,但由于技术难度很大,早期缺乏相关的
远程监测数据。因此,鸟群运动中通信机制
的奥秘始终无法揭开。近年来,由于导航与
通信技术的发展,很多学者借助高精度 GPS追踪器对鸟群的通信行为进行了系统深入的
研究。
1995 年,Biro 等人利用高精度 GPS 追
踪器深入研究了两只家鸽的飞行状况[6]。他
们发现:当两只鸟的偏好飞行方向不同且差
别较小时,两只鸟的实际飞行方向会折衷并
达到一致;然而,当它们的偏好飞行方向差
别超过一定的阈值,则两只鸟分别成为领导
者和追随者。
2008年,Dell’Ariccia等人通过在训练有
素的家鸽身上配备高精度的 GPS 数据记录
器来获取家鸽运动的时空信息,从而深入研
究飞行中鸟群的通信效率。他们发现:家鸽
群体飞行比家鸽单独飞行具有显著的生存优
势[7]。
鸟群的分工不是简单地把一群鸟分成领
导者和追随者两类,领导者和追随者之间的
关系可能更加复杂。2010 年,Nagy 等人通
过高精度、便携式 GPS追踪器获取家鸽运动
的时空信息[8],并深入探讨了家鸽运动的规
律。具体而言,他们利用个体方向选择的时
间先后顺序,深入分析了不同个体之间的相
互作用数据,并发现了以下规律:i)群体中
个体之间存在着明确的层次结构(图 3);ii)
鸽群中个体的位置与它的层次地位存在着强
相关性;iii)家鸽对信号的反应主要通过左眼
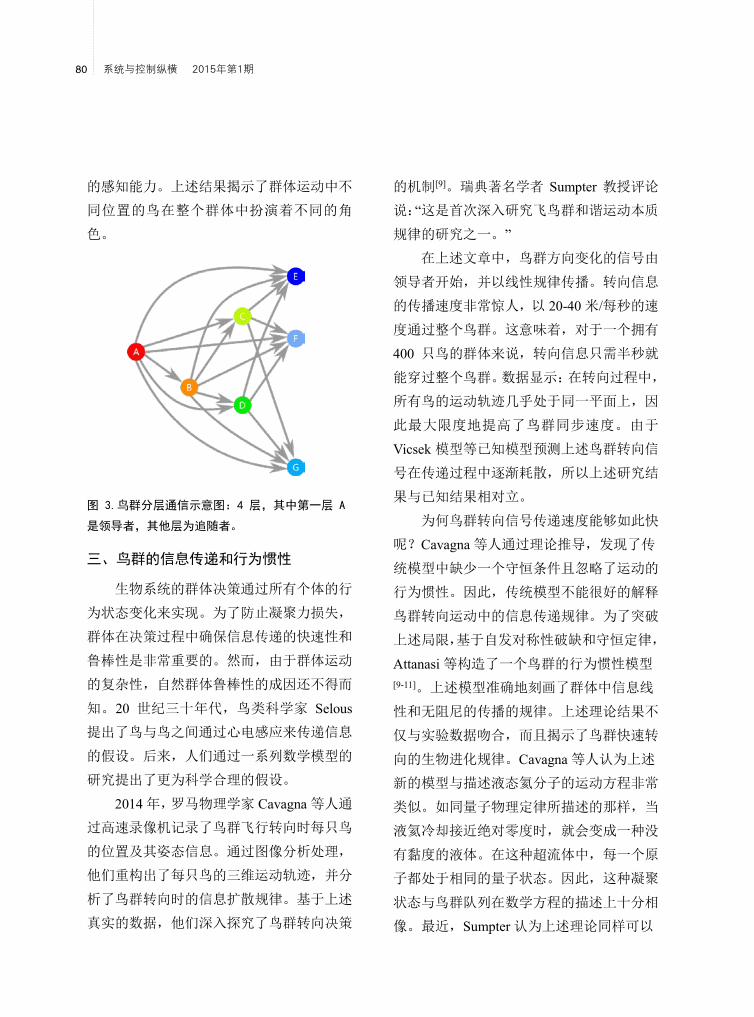
系统与控制纵横 2015年第1期80
的感知能力。上述结果揭示了群体运动中不
同位置的鸟在整个群体中扮演着不同的角
色。
3. 4 A
生物系统的群体决策通过所有个体的行
为状态变化来实现。为了防止凝聚力损失,
群体在决策过程中确保信息传递的快速性和
鲁棒性是非常重要的。然而,由于群体运动
的复杂性,自然群体鲁棒性的成因还不得而
知。20 世纪三十年代,鸟类科学家 Selous
提出了鸟与鸟之间通过心电感应来传递信息
的假设。后来,人们通过一系列数学模型的
研究提出了更为科学合理的假设。
2014年,罗马物理学家 Cavagna等人通
过高速录像机记录了鸟群飞行转向时每只鸟
的位置及其姿态信息。通过图像分析处理,
他们重构出了每只鸟的三维运动轨迹,并分
析了鸟群转向时的信息扩散规律。基于上述
真实的数据,他们深入探究了鸟群转向决策
的机制[9]。瑞典著名学者 Sumpter 教授评论
说:“这是首次深入研究飞鸟群和谐运动本质
规律的研究之一。”
在上述文章中,鸟群方向变化的信号由
领导者开始,并以线性规律传播。转向信息
的传播速度非常惊人,以 20-40米/每秒的速
度通过整个鸟群。这意味着,对于一个拥有
400 只鸟的群体来说,转向信息只需半秒就
能穿过整个鸟群。数据显示:在转向过程中,
所有鸟的运动轨迹几乎处于同一平面上,因
此最大限度地提高了鸟群同步速度。由于
Vicsek模型等已知模型预测上述鸟群转向信
号在传递过程中逐渐耗散,所以上述研究结
果与已知结果相对立。
为何鸟群转向信号传递速度能够如此快
呢?Cavagna等人通过理论推导,发现了传
统模型中缺少一个守恒条件且忽略了运动的
行为惯性。因此,传统模型不能很好的解释
鸟群转向运动中的信息传递规律。为了突破
上述局限,基于自发对称性破缺和守恒定律,
Attanasi等构造了一个鸟群的行为惯性模型[9-11]。上述模型准确地刻画了群体中信息线
性和无阻尼的传播的规律。上述理论结果不
仅与实验数据吻合,而且揭示了鸟群快速转
向的生物进化规律。Cavagna等人认为上述
新的模型与描述液态氦分子的运动方程非常
类似。如同量子物理定律所描述的那样,当
液氦冷却接近绝对零度时,就会变成一种没
有黏度的液体。在这种超流体中,每一个原
子都处于相同的量子状态。因此,这种凝聚
状态与鸟群队列在数学方程的描述上十分相
像。最近,Sumpter认为上述理论同样可以

2015 No.1 All About Systems and Control 81
的感知能力。上述结果揭示了群体运动中不
同位置的鸟在整个群体中扮演着不同的角
色。
3. 4 A
生物系统的群体决策通过所有个体的行
为状态变化来实现。为了防止凝聚力损失,
群体在决策过程中确保信息传递的快速性和
鲁棒性是非常重要的。然而,由于群体运动
的复杂性,自然群体鲁棒性的成因还不得而
知。20 世纪三十年代,鸟类科学家 Selous
提出了鸟与鸟之间通过心电感应来传递信息
的假设。后来,人们通过一系列数学模型的
研究提出了更为科学合理的假设。
2014年,罗马物理学家 Cavagna等人通
过高速录像机记录了鸟群飞行转向时每只鸟
的位置及其姿态信息。通过图像分析处理,
他们重构出了每只鸟的三维运动轨迹,并分
析了鸟群转向时的信息扩散规律。基于上述
真实的数据,他们深入探究了鸟群转向决策
的机制[9]。瑞典著名学者 Sumpter 教授评论
说:“这是首次深入研究飞鸟群和谐运动本质
规律的研究之一。”
在上述文章中,鸟群方向变化的信号由
领导者开始,并以线性规律传播。转向信息
的传播速度非常惊人,以 20-40米/每秒的速
度通过整个鸟群。这意味着,对于一个拥有
400 只鸟的群体来说,转向信息只需半秒就
能穿过整个鸟群。数据显示:在转向过程中,
所有鸟的运动轨迹几乎处于同一平面上,因
此最大限度地提高了鸟群同步速度。由于
Vicsek模型等已知模型预测上述鸟群转向信
号在传递过程中逐渐耗散,所以上述研究结
果与已知结果相对立。
为何鸟群转向信号传递速度能够如此快
呢?Cavagna等人通过理论推导,发现了传
统模型中缺少一个守恒条件且忽略了运动的
行为惯性。因此,传统模型不能很好的解释
鸟群转向运动中的信息传递规律。为了突破
上述局限,基于自发对称性破缺和守恒定律,
Attanasi等构造了一个鸟群的行为惯性模型[9-11]。上述模型准确地刻画了群体中信息线
性和无阻尼的传播的规律。上述理论结果不
仅与实验数据吻合,而且揭示了鸟群快速转
向的生物进化规律。Cavagna等人认为上述
新的模型与描述液态氦分子的运动方程非常
类似。如同量子物理定律所描述的那样,当
液氦冷却接近绝对零度时,就会变成一种没
有黏度的液体。在这种超流体中,每一个原
子都处于相同的量子状态。因此,这种凝聚
状态与鸟群队列在数学方程的描述上十分相
像。最近,Sumpter认为上述理论同样可以
用于刻画其他类似的群体运动,如鱼群或移
动细胞组合等。
大自然向我们展示了神奇的鸟群运动规
律:鸟群的列队飞行规律,飞行中鸟群的信
息层次传递规律,鸟群快速转向的规律等。
本文简要地回顾了系统控制领域中一些群体
运动的模型与规律。在这些研究中,多个体
系统理论对揭示鸟群运动的奥秘起到了举足
轻重的作用。但是,鸟群运动中仍然存在着
很多奥秘,期待着系统科学家们来揭开。
作者感谢朱恒辉和王雄两位研究
生帮忙收集相关资料。
系统与控制纵横 2015年第1期82
参考文献Reynolds C W. Flocks, herds, and schools: A [1]
distributed behavioral model. Comput. Graph., 1987,
21(4): 25-34.
Vicsek T, Czirók A, Ben-Jacob E, Cohen I, Shochet [2]
O. Novel type of phase transition in a system of self-
driven particles. Phy. Rev. Lett., 1965, 75(6): 1226-
1230.
Jadbabaie A, Lin J, Morse A S. Coordination of groups [3]
of mobile autonomous agents using nearest neighbor
rules.IEEE Trans. Auto. Contr., 2003, 48(6): 988-
1001.
Tang G, Guo L. Convergence of a class of multi-[4]
agent systems in probabilistic framework. J. Syst. Sci.
Complexity, 2007, 20(2): 173-197.
Couzin I D, Krause J, Franks N R, Levin S A. [5]
Effective leadership and decision-making in animal
groups on the move. Nature, 2005, 433: 513-516.
Biro D, Sumpter D J, Meade J, Guilford T. From [6]
compromise to leadership in pigeons homing. Curr.
Biol., 2006, 16(21): 2123-2128.
Dell, Ariccia G, Dell, Omo G, Wolfer D P, Lipp H [7]
P. Flock flying improves pigeons, homing: GPS-
track analysis of individual flyers versus small groups.
Anim. Behav., 2008, 76: 1165-1172.
Nagy M, kos Z, Biro D, Vicsek T. Hierarchical group [8]
dynamics in pigeon flocks. Nature, 2010, 464: 890-
893.
Attanasi A, Cavagna A, Castello L D, Giardina I, [9]
Grigera T S, Jelic A, Melillo S, Parisi L, Pohl O, Shen
E, Viale M. Information transfer and behavioral inertia
in starling flock. Nature Phys., 2014, 10(9): 691-696.
Chen Y, Lü J, Lin Z. Consensus of discrete-time [10]
multi- agent systems with transmission nonlinearity.
Automatica, 2013, 49: 1768-1775.
Chen Y, Lü J, Yu X, Lin Z. Consensus of discrete-[11]
time second order multi-agent systems based on
infinite products of general stochastic matrices. SIAM
J. Contr. Optim., 2013, 51(4): 3274-3301.
【作者简介】 吕金虎,现任中国科学院数学与系统科
学研究院研究员、博士生导师。IEEE Fellow、国家杰
出青年科学基金获得者、中国科学院“百人计划”入选
者、“百千万人才工程”国家级人选、国家“有突出贡
献中青年专家”、科技部中青年科技创新领军人才、中
国科学院青年科学家奖获得者、享受国务院特殊津贴专
家。

2015 No.1 All About Systems and Control 83
逸闻趣事
深山沟中铸利剑
李言俊 西北工业大学航天学院
20世纪60年代中国所处的国际形势比现在要
严峻得多,除了远在欧洲的阿尔巴尼亚是坚定支
持中国的一位朋友之外,几乎周围都是敌人,尤
其是当时的两个超级大国美国和苏联,更是对中
国虎视眈眈,恨不得把中国直接灭掉。为了应对
这种不利形势,同时也是为了改善中国的工业布
局,中央制订了规模宏大的三线建设规划,包括
攀枝花和酒泉两个大型钢铁公司及一大批国防企
事业单位。对于三线建设,毛泽东主席有两条著
名的指示;一是“三线建设不好我睡不着觉”;
二是“三线建设好了,没有火车,骑着毛驴也要
去看一看”。总部设在遵义的七机部第一个完整
的导弹基地——061基地也就是在这种情况下应运
而生。
一、让毛主席他老人家睡好觉
当时的七机部,也就是后来的航天部,对于
061基地的建设是非常重视的,文革前派了一位副
部长担任061基地建设指挥部的负责人,后来老干
部都被打倒了,061基地的负责人也换成了王洪文
在上海一起造反的小兄弟熊某。时间不长,熊某
也因在男女关系问题上不检点而被免职,但这些
对061基地的建设并没有任何影响。
061基地当时被国家确定为绝密单位。为了保
密,对外通信一律采用“贵州凯山XX信箱”,其
实并没有任何地方叫“凯山”,只是虚设的一个
邮局名称而已。061基地除总部设在遵义之外,40
多个厂所都分别建在遵义、绥阳、桐梓三县的山
沟之中。
我是在1968年被分配到061基地3405厂的,
当时一起分配到3405厂的有40多位大学生,分别
来自北航、西工大、南航、哈军工、西交大、
清华、南京工学院(现东南大学)、成电等院
校。由于当时整个基地仍在筹建阶段,有的厂已
开始土建,有的厂还在选址的初期。由于我所在
的3405厂属于主机厂,已开始厂房建设,我们很
自然地就投入到了基建队伍,开始每天挖沟、填
壕、打水泥、搬砖、推土、刷油漆。尽管每月只
有43.5元的工资,白天干活很累,又没任何其他
补贴,但大家却干得极为认真、卖力,目的就是
“早日把三线建设好,让毛主席他老人家睡好
觉”。
当时我主要是参加自动驾驶仪总装厂房的建
设工作,对厂房的洁净度要求很高,这导致对厂
房的密封性要求也很高,不允许厂房有任何裂
缝,要求厂房的所有基础都要坐落在原始的山石
上,因此我们就要从地面开始向下挖土,一直挖
到天然山石为止。于是,我们就开始了“愚公”
的工作,采用最原始的工具,就是农村用的那种
镢头和土筐,再加上最原始的卷扬机,每天挖山
不止,最深处达15米左右。然后,就开始在挖好
的基础上浇灌水泥,脏活累活也是我们这帮学生
们干。当时我负责向混凝土搅拌机里倒水泥,先

系统与控制纵横 2015年第1期84
把100斤重的一袋水泥搬起来顶在腿上,拆掉缝合
线,然后再把水泥倒入搅拌机中。反复重复这一
动作,每天都要来回搬动3万多斤重的水泥,晚上
还要集体学习毛主席著作,倒是不用担心失眠,
只觉得睡眠时间不够。干活越多,吃得越多,还
是一分钱的补贴都没有,每月也还是43.5元。
当我们建起第一批楼房之后,便有不少当地
农民扶老携幼地前来参观,据说还有的农民看到
我们的电灯只用一根线拴着就很亮,也有将灯泡
偷回家用棉线吊起来的,当然不会亮,后来他们
才知道要用电,这已是后话了。
当部分厂房建起来之后,就开始了试生产,
1971年我们在边建设边生产的简易条件下,生产
出来061基地的第一批导弹。
即使在那无政府主义泛滥最为严重的几年,
我们061基地仍然坚持每年4批约300发导弹的按时
出厂,曾多次受到上级领导的表扬。
说起当年的无政府主义泛滥,现在的人很难
想象当时的情景,但对于我们这些过来的人,确
实记忆犹新,现举两个简单的小例子。
一个例子发生在由重庆开往上海的25次快
车。有一次一个火车司机看到在一个小站上贴有
大字报,便停下火车去看大字报,一看有些大字
报是针对自己的,一生气,摘下车头便把火车头
开跑了,将列车留在了小站上6个多小时,铁路局
只好重新调来车头,才把列车拉走。
另一个例子是我们亲身经历的事。一天,我
们正在对一炉高导磁率合金进行热处理,中间突
然停电,导致我们价值50多万元的材料报废,打
电话问其原因,回答说“没烟抽了,去买烟去
了”。原来变电站的人听说我们单位从上海拉来
了一火车车厢的食品和烟糖,借机向我们索要,
我们只好赶快送一些东西过去,否则,我们不知
道又会遭遇到多大的损失。
因此,在这种情况下,我们不受不良思潮的
影响,坚持“抓革命,促生产”,确实是难能可
贵的了。
二、要红四不要命
我国的红旗2号地-空导弹的射高只有2.7万
米,这种导弹对付美国和台湾的U-2高空侦察机
十分有效,曾先后击落过5架U-2侦察机,但对
付美国的SR-71高空侦察机就不灵了,因为它的
飞行高度在3万米以上,因而这种高空侦察机曾
一度肆无忌惮地多次飞入我国新疆的原子弹试验
基地上空进行侦察。为此,我国提出了研制红旗
4号地-空导弹的计划。红旗4号导弹的射高为3.7
万米,研制方案采用了许多当时国际上最先进的
技术,例如相控阵制导技术、舵机利用高频振动
消除静摩擦技术、陀螺系统的小型化高精度技术
等,其中最为关键的还是相控阵雷达制导技术,
这项技术在国外也是刚开始应用,而我国则是在
该项目提出来之后才开始同步研制。
项目开始时由上海机电二局负责研制,进展
并不顺利,光是放大器桥式电路中的一对晶体管
的配对问题就折腾得研制人员很长时间毫无进
展,因为从大量的晶体管中筛选出一对在各种条
件下性能参数相同或十分相近的晶体管确属不
易。后来可能是中央相关方面的负责人嫌上海进
展太慢,下令贵州061基地也参与研制。当时061
基地的军管会主任是空六军的副军长贺芳齐,仿
照红军抢占泸定桥时提出的“要桥不要命”的口
号,提出了“要红四不要命”的口号,整个基地
同心协力,加之当时的参研人员一律都是大学毕
业生,项目进展很快。在上海毫无进展的桥式电
路晶体管配对问题,061基地的研制人员连续奋战
了60多个昼夜就解决了。
正当项目大张旗鼓地推进之时,“九一三”
事件爆发,林彪被摔死在蒙古的温都尔汗。后来
就说让贵州干红四是林彪的阴谋,是林彪要拿贵
州压上海,061基地干红四是犯了“方向性、路线
2015 No.1 All About Systems and Control 85
性”错误。由于当时的技术条件限制,上海也确
实无法完成任务,加之承担相控阵雷达研制的南
京某单位提出还需要再拨给他们十亿元的研制经
费,而且还不一定能够研制出来,该项目正式宣
布寿终正寝。这是令人遗憾的一件事,但对研制
队伍是一次锻炼,只不过代价太大了一些。
三、短命的东升五号
大概是在1974年,我们又接受了一项新的研
制任务,研制“东升5号”地对地导弹,这是我
国第一种采用捷联式惯性导航系统的导弹,射程
300千米,由航天一院设计,贵州061基地负责试
制。这种导弹的研制一经提出,便引起了多方的
关注。二炮部队想要,普通的炮兵部队也想要,
陆军也想装备。航天一院的积极性很高,由于这
是我国第一次采用捷联惯导系统,等于是对这种
新型系统的试验,如果使用成功,便可以在我国
的东风4号、东风5号以及后续的长程导弹上采用
这种新型的制导方式。而对于我们这些青年人来
说,更是希望干好这一项目,因为这是我们应该
对国家所做的一种贡献。
由于这种导弹的研制无任何先例,从导弹的
零部件到生产中的测试和调试设备,全都要试制
单位动手研制,工作量相当大。我记得一台测试
设备中需要5只闸流管,当时很不好买,便由我带
领一个复员转业军人去全国各地打听,看哪里有
这种东西。我们出发的第一站是成都,到成都后
便直奔几个大型国防厂。那时在国防系统内部采
购是不需要带任何钱的,只要带上盖有本单位公
章的采购清单和上级发放的调拨单就可以了。在
成都一开始我们去了七八个工厂,都没有这个东
西,最后去了一个不大的无线电厂,该厂的供应
科说他们刚从外地搞到了20只符合我们要求的闸
流管。他们的风格很高,尽管他们也十分需要,
还是恋恋不舍地调拨给了我们5只。
当然,捷联惯导系统元部件的研制所遇到的
困难就更多了,但那时我们都还年轻,有的是精
力和干劲,不怕吃苦,不怕熬夜,也无任何家庭
负担,一心一意干工作。
我们一面研制新产品,一面还要保证现有产
品生产任务的完成,虽然很忙,大家觉得很开
心。当时,我们的生活很苦,在职工食堂吃饭,
买一个青菜炒豆腐也需要交一张豆腐票,更别说
买肉菜了,过年过节才能吃到肉,也是数量极为
有限。即便是这样,并没有人叫苦,只要有活
干,能为国家作贡献就行。
正当我们干劲十足地为国家奋斗时,突然上
级一个命令下来叫停,说“东升5号”项目的上马
是陈锡联主持中央军委工作时批的。前一段时间
传达文件时说,因叶剑英同志生病住院,由陈锡
联代为主持中央军委工作。后来,叶剑英又出来
主持中央军委工作了,他还说“我根本就没有生
病”。叶剑英出来工作后,宣布陈锡联审批的项
目一律作废,“东升5号”只能下马。
下就下吧,反正上面的事情咱也弄不清,不
用再熬夜了,那就洗洗睡吧,反正第二天还要忙
于正常的生产任务,也算对得起这每月43.5元的
工资了。
以后每天晚上便有许多人聚在一起打扑克钻
桌子,而我则忙于收集各种资料或看书,我所收
集的资料直到1995年以前,仍有不少我们专业的
研究生作为重要的参考文献。
四、从国外拉回来的导弹
已不记得具体时间了,我国又从某国拉回来3
发导弹,让我们仿制。这是某大国在某国进行阵
地改造的一种导弹。我不相信阵地上可以改造出
这种导弹,但有一点却是真的,即该大国的专家
们对这种导弹的设计原理确实吃得很透,从整个
导弹硬件上来看,变化并不太大,尤其是控制系
统部分,仅是自动驾驶仪中的磁放大器的线圈有
所改动,整个导弹由单传速比变化机构改成了双

系统与控制纵横 2015年第1期86
传速比变化机构。虽然导弹的硬件改动不大,但
整体性能却提高不少,尤其是低空性能。改进前
的导弹的最低射高只有3000米,但改进后的导弹
却可以由高空拉到低空500米,在低空500米的情
况下仍可击中目标。
这种导弹的仿制没有遇到太多的意外干扰,
顺利完成了仿制和生产任务,也成了我军所列装
的导弹之一,只是目前已被淘汰。
五、见习工资转正了
大约是在1974年,具体时间已经记不清了,
在我们已经习惯了43.5元的低工资生活时候,突然
传来了好消息,说我们已经拿了多年的见习工资
要转正了。贵州是三类地区,转正后的工资是53
元正,这就意味着我们每人每月可以增加9.5元的
收入。对于今天的青年人来说,9.5元似乎可有可
无,不算什么,但当时对我们来说,可是一个月
的生活费。
据说,这次大学生的工资转正,来之十分不
易。据传闻消息说,周恩来总理召集26个省市自
治区的领导人开会(当时天津、重庆都还不是直
辖市,海南省尚未成立,西藏的工资是另外的政
策,台湾省领导人暂无资格参加会议),研究全
国大学生的见习工资转正问题,张春桥跳出来发
难,提出“大学生工资转正,工人、农民怎么
办?”。张春桥是一个很会胡搅蛮缠的人,经常
会莫名其妙地产生一些奇谈怪论,例如“宁要社
会主义的草,不要资本主义的苗”,“卫星上天
了,红旗落地了”,可能都是他的创造。会议讨
论的最后结果是大多数的与会领导人都坚持同意
学生工资转正。最后周总理表态说,既然大多数
领导人都同意大学生工资转正,那就少数服从多
数,算作会议通过。此事上报给毛主席,毛主席
批阅是“大学生水平不高,觉悟不高,工资也
不高”。好了,只要有最后一个“不高”就可以
了,能涨工资总比不涨强。
就这样,53元的工资我一直拿到硕士研究生
毕业。
1981年底,我们硕士研究生毕业,拿到了硕
士学位,这也是我国自己培养的第一批硕士,大
学决定让我留校任教。就在这时,七机部下了一
个文件,规定凡七机部系统在全国各大学进修学
习和读研的人员,毕业后必须一律回原工作单
位。
知道这一文件后,我们找到了西工大管分配
工作的老师,询问如何办,回答说,“不理他,
我给你发工资就行了”。因为我们之前已将户口
迁至学校,大学只要凭派遣证给我们办理一切必
要的手续和工资关系就行。就这样,我按统分研
究生毕业,工资调到了65元,只是档案一直在贵
州原单位,直到我从美国学习回国之后,原单位
的领导已经换了若干届,才从贵州将档案要回。
六、后记
自1968年本科毕业分配到贵州,到1978年底
到西工大导弹控制专业学习,我在贵州061基地工
作了整十年时间,我参与制造的导弹至少在2000
发以上,这是我感到欣慰的。自1978年离开061基
地之后的34年时间里,便没有再去过贵州。山沟
里的生活虽然苦,但却是丰富多彩的,至今仍十
分令我怀念。
自2012年起我因工程硕士研究生班的开题、
中期检查及论文答辩,多次重访061基地,那里已
经发生了天翻地覆的变化,我所工作过的工厂已
搬至贵阳,新建的厂房高大明亮,非常现代化,
远非昔日所比。在研究生的陪同下,我也去老厂
进行了访问,仍有一些熟人在留守,多数人已经
退休,分散在全国各地,在苏州、常州、无锡、
上海居住的3405厂的老人仍经常聚会,一起回忆
当年那虽苦亦乐的三线生活。
2015 No.1 All About Systems and Control 87
当年的厂房现在已经显得极为破旧矮小,有
的车间已租给当地的个体企业开办小型工厂,
高速公路从工厂附近穿过,附近正在修建大型水
库,老厂旧址将会成为具有开发前景的风水宝
地。这对于我们这些老三线人也是一种安慰。
从贵州回来,写了两首诗,算是对当年山沟
生活的一种怀念,也算是该文的一个结束语。诗
中的金钟山、向阳山均为厂区的小山,也是我们
的生活所在地。
一
梦里常见金钟山,
天蓝水青百花艳,
激情凝聚强军梦,
日夜为国铸利剑。
今日重访青春地,
物是人非楼房残,
借问旧友今何在?
一缕晚霞映天边。
二
魂牵梦绕向阳山,
一别转瞬三十年,
深山铸剑成旧景,
年已古稀两鬓斑。
莫道当年山沟苦,
心系祖国苦亦甜。
我劝朋辈重抖擞,
健康舒心到百年。
【作者简介】 李言俊,教授、博士生导师。1944年1
月生,1967年西北工业大学惯性导航专业本科毕业,
毕业后曾在导弹基地工作10年,1981年于西北工业大
学导弹制导专业获硕士学位,1985年至1987年在美国
南加州大学进修学习,1989年6月于西北工业大学导
航制导系统专业获博士学位,1990年4月评聘为副教
授,1991年12月破格晋升为教授,1993年经国务院
学位委员会批准为博士生导师,1992年开始享受政府
特殊津贴,1991年被航空航天部授予“做出突出成绩
的中国博士学位获得者”。自1993年以来,曾担任西
北工业大学研究生院常务副院长,中国试飞员学院副
院长,中国航空研究生教育学会副理事长,香港学术
评审局顾问专家,国务院学位委员会控制科学与工程
学科评议组成员,全国工科自动控制教材编审委员会
委员,中国兵工学会自动控制分会副主任,中国航空
学会武器系统专业委员会委员,全国工程硕士质量分
析与调研跟踪小组成员。长期从事自动控制理论及应
用、导弹精确制导、导弹及航天器控制系统分析与设
计、仿生技术、图像处理与目标识别技术等方面的研
究工作,在国内外重要学术刊物上发表论文400多篇,
发表教学及管理研究方面的论文30多篇,主编和参编
教材、专著14部,先后获国家级教学成果二等奖及省
级教学成果特等奖、二等奖各一次,获部级科技进步
二、三等奖7次。在主持中国试飞员学院工作期间,
培养了中国第一批硕士试飞员和第一批硕士试飞工程
师,为中国的新机试飞工作做出了贡献。
系统与控制纵横 2015年第1期88
大智若愚,大巧若拙,一些学界顶尖的大专家大学者甚至泰
斗级的人物,在日常生活中常常爱犯糊涂,有些大师竟然会找不
到回家的路。
国学大师章太炎长期埋头治学,对人间事几乎到了一种“忘
我”的程度,经常不识路。在日本办《民报》期间,常闹出不识
归途、误入别人家门的笑话。当时,章太炎住在报社,距离孙中
山的寓所很近,但每次去孙中山家必须要有人同行,否则他肯
定迷路。这种情况到了晚年更加严重。一次,他坐车回家,车
夫问他去哪里,他说:“我的家里。”车夫问他家在哪里,他回
答:“马路上弄堂里,弄堂口有家纸烟店。”结果,车夫拉着他
满大街转。还有一次,他从上海同福里寓所坐车到旧书店买书,
从书店出来后,他坐上一辆黄包车,示意车夫向西走。车夫照他
的话,走了好长一段路,见他还不动,就问道:“先生,你究竟要到
哪里去?”章太炎说:“我自己也不知道,上海人都知道我是章
疯子,你只要拉到章疯子家就是了。”
爱因斯坦是一位赫赫有名的科学家,他担任普林斯顿高级研
究所主任后更忙了,很少能待在办公室里,一切日常事务性工作
都由秘书处理。一天,已经过了下班时间,办公室里的电话铃
响了。秘书不耐烦地拿起了听筒。“请问,我可以和主任谈话
吗?”耳机里传来温文尔雅又熟悉的声音。可秘书一时没听出是
谁,按老习惯回答:“主任不在。”“那么,请您告诉我,爱因
斯坦博士住在哪儿?是他新搬的家。”秘书委婉地回答说:“不
能奉告,因为爱因斯坦博士太忙,他不愿他的住处受到干扰。”
这时,电话里的声音突然变低了:“请你不要告诉任何人,我就
是爱因斯坦博士。我正要回家,可我忘记了自己住在哪里了,请
你给我查一下我的住址。”秘书听了,竟忍不住哈哈大笑起来。
原来,这天爱因斯坦回家时,在路上边走边思考问题,走着走
着,竟到了一个陌生的地方。当他发现自己迷了路,想回家时,
却又忘记了自己家的地址。在没有办法的情况下,他只好打电话
麻烦秘书查找地址了。
虽然大师们很迷糊,但是这些逸闻趣事从另一个侧面也印证
了他们的学养与魅力。
常迷路的大师
来源:《文史博览》
茶余饭后
《系统与控制纵横》(英文名称:All
About Systems and Control)是由中国科学院
数学与系统科学研究院和中国自动化学会控
制理论专业委员会联合主办的科普型刊物,
主要刊登系统科学与控制科学领域知识性、
趣味性、普及性的文章,旨在弘扬学科文
化,梳理发展脉络,传播科学知识,宣传科
研成果,服务人才培养,积极推进学科普及
工作,让更多的人了解系统科学与控制科学
的过去、现在和未来。
本刊面向大中院校教师和学生,本领域
研究生、科研人员,以及对本学科感兴趣的
人士。本刊暂定为半年刊,主要栏目包括:科学人物、学人风采、学科史林、漫谈系统控
制、逸闻趣事、博文撷英、奇思异想、软硬兼施(介绍软硬件)、教学交流、应用范例、
专家论丛、精彩书评、难题征解、读者来信等。
系统科学与控制科学有着辉煌的发展历史,有着广阔的发展前景。让更多的人走近
她,了解她,是我们的初衷,也是我们的美好愿景。在此,我们热诚欢迎各界人士为这片
新开垦的系统与控制科普园地投稿,齐心协力做好学科的普及工作,共同推动学科发展。
来稿请注意如下事项:
1. 文字精炼,每篇文稿一般不超过6000字。如有参考文献,应附在文后。
2. 为增加文章的可读性,建议作者采用图文并茂的形式。插图可以是人物照片、实物
照片、实验照片或示意图等。
3. 投稿时请同时提供作者本人的标准照或工作生活照,并附上作者简历。
本刊录用稿件一律不收版面费。
来稿请寄:
北京中关村东路55号中国科学院数学与系统科学研究院控制理论专业委员会 收
邮政编码:100190
电话:010-82541403
电子投稿Email地址:[email protected]。
《系统与控制纵横》
征文简则

上海金茂大厦 摄影 / 王林