
1.1 Spannungsvektor und Spannungstensor 1.2 ...wandinger.userweb.mwn.de/HF/v1_1.pdf · Prof. Dr....
73
Prof. Dr. Wandinger 1. Elastizitätstheorie Höhere Festigkeitslehre 1.1-1 12.09.14 1. Spannungszustand 1.1 Spannungsvektor und Spannungstensor 1.2 Hauptspannungen 1.3 Mohrsche Spannungskreise 1.4 Fließbedingung 1.5 Gleichgewichtsbedingungen
Transcript of 1.1 Spannungsvektor und Spannungstensor 1.2 ...wandinger.userweb.mwn.de/HF/v1_1.pdf · Prof. Dr....
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-1
12.09.14
1. Spannungszustand
1.1 Spannungsvektor und Spannungstensor
1.2 Hauptspannungen
1.3 Mohrsche Spannungskreise
1.4 Fließbedingung
1.5 Gleichgewichtsbedingungen
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-2
12.09.14
1.1 Spannungsvektor und Spannungstensor
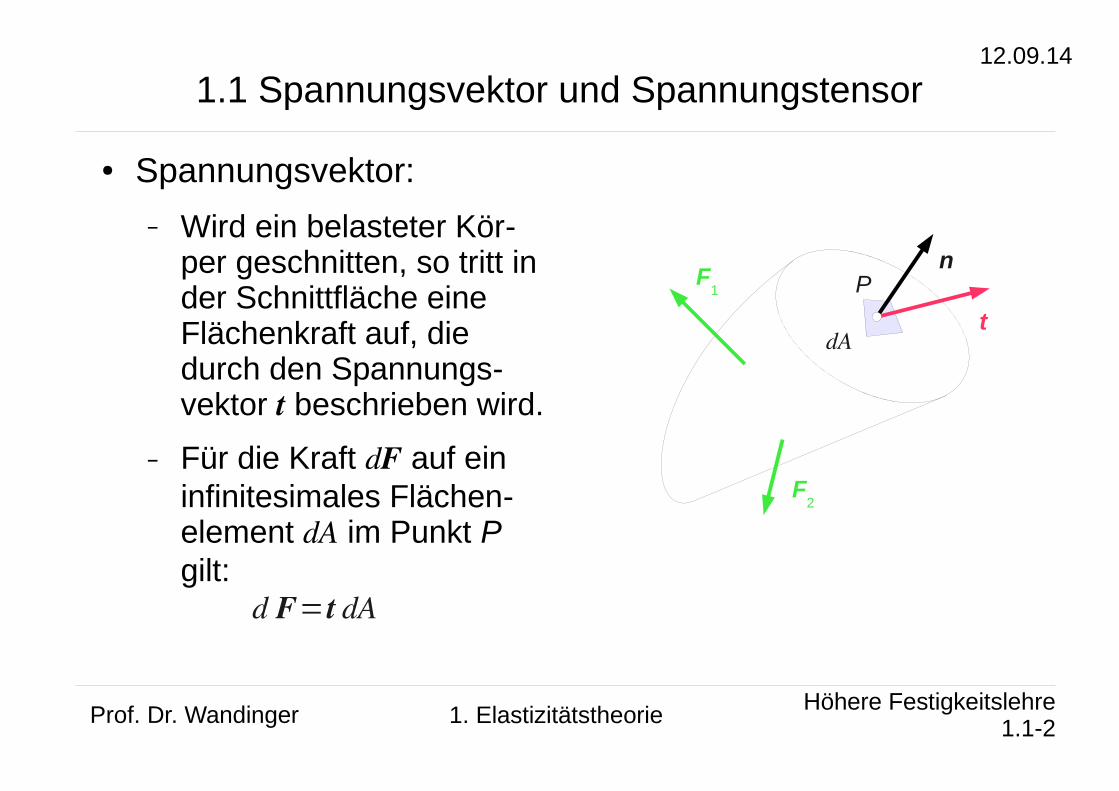
● Spannungsvektor:
– Wird ein belasteter Kör-per geschnitten, so tritt in der Schnittfläche eine Flächenkraft auf, die durch den Spannungs-vektor t beschrieben wird.
– Für die Kraft dF auf ein infinitesimales Flächen-element dA im Punkt P gilt:
P
dAt
nF
1
F2
d F= t dA
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-3
12.09.14
1.1 Spannungsvektor und Spannungstensor
– Die Orientierung der Fläche dA wird durch den Einheitsnor-malenvektor n beschrieben, der aus dem geschnittenen Körper heraus zeigt.
– Der Spannungsvektor hängt außer vom Punkt P auch vom Einheitsnormalenvektor n ab:
– Die Gesamtheit aller Spannungsvektoren t(P, n) an einem Punkt P des Körpers heißt Spannungszustand im Punkt P.
– Die Gesamtheit der Spannungszustände an allen Punkten P des Körpers heißt Spannungsfeld im Körper.
t= t P ,n
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-4
12.09.14
1.1 Spannungsvektor und Spannungstensor
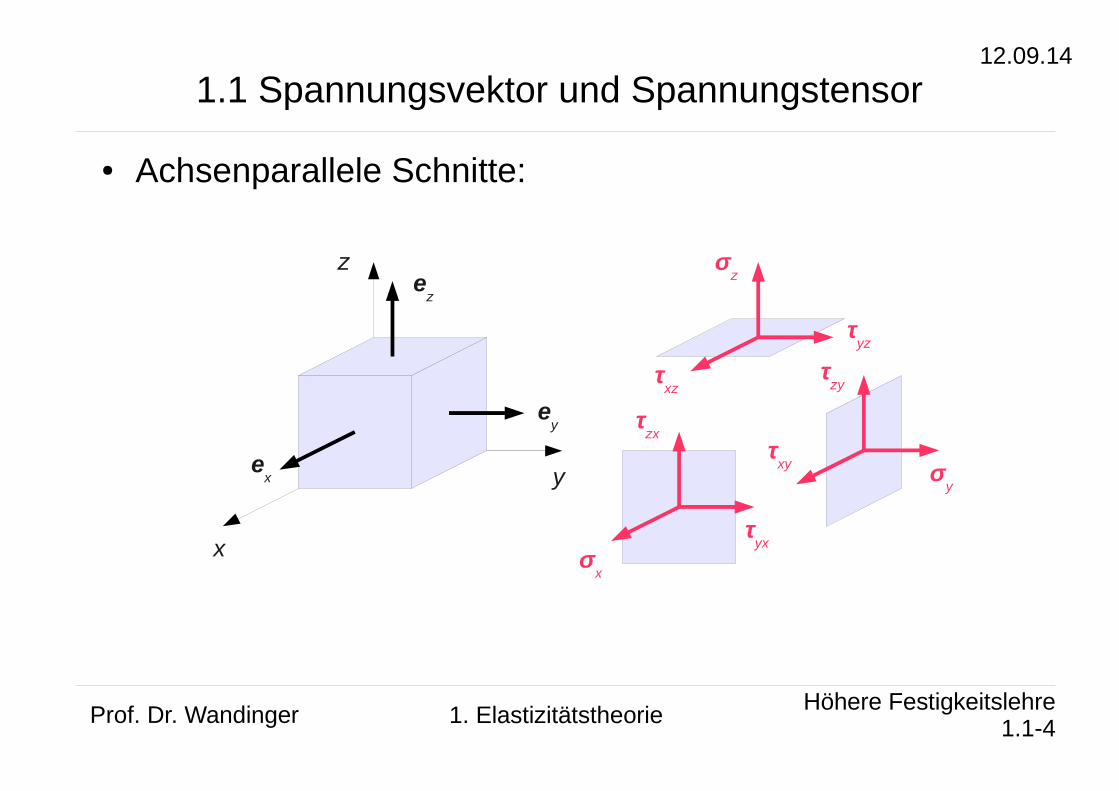
● Achsenparallele Schnitte:
x
y
z
ex
ey
ez
σx
σy
σz
τyx
τzx
τxy
τzyτ
xz
τyz
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-5
12.09.14
1.1 Spannungsvektor und Spannungstensor
– Der Normalenvektor zeigt in Richtung einer Achse des Ko-ordinatensystems.
– Am positiven Schnittufer zeigt der Normalenvektor in Rich-tung der Koordinatenachse und am negativen Schnittufer entgegen der Richtung der Koordinatenachse.
– Für die Spannungsvektoren gilt:
[ t P , ex ]=[ x
yx
zx] , [ t P , e y]=[
xy
y
zy] , [ t P , ez ]=[
xz
yz
z]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-6
12.09.14
1.1 Spannungsvektor und Spannungstensor
– Die Komponente des Spannungsvektors in Richtung des Normalenvektors heißt Normalspannung.
– Die Komponenten des Spannungsvektors in der Schnitt-ebene heißen Schubspannungen.
– Bei den Schubspannungen gibt der linke Index die Richtung der Schubspannung und der rechte Index die Richtung des Normalenvektors an.
– Am positiven Schnittufer zeigen positive Spannungskompo-nenten in Richtung der positiven Koordinatenrichtung.
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-7
12.09.14
1.1 Spannungsvektor und Spannungstensor
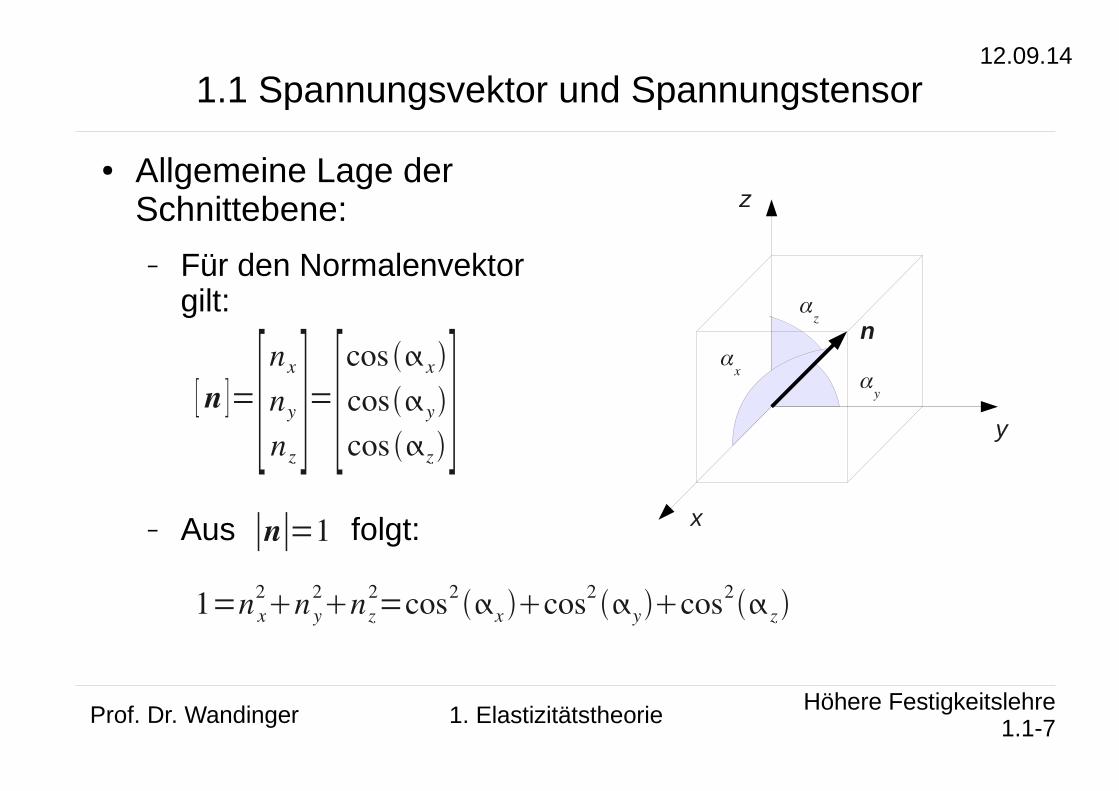
● Allgemeine Lage der Schnittebene:
– Für den Normalenvektor gilt:
– Aus folgt:
nα
x αy
αz
x
y
z
[n ]=[nx
ny
nz]=[
cos x
cos y
cos z]
∣n∣=1
1=n x2n y
2nz
2=cos2
x cos2ycos2
z
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-8
12.09.14
1.1 Spannungsvektor und Spannungstensor
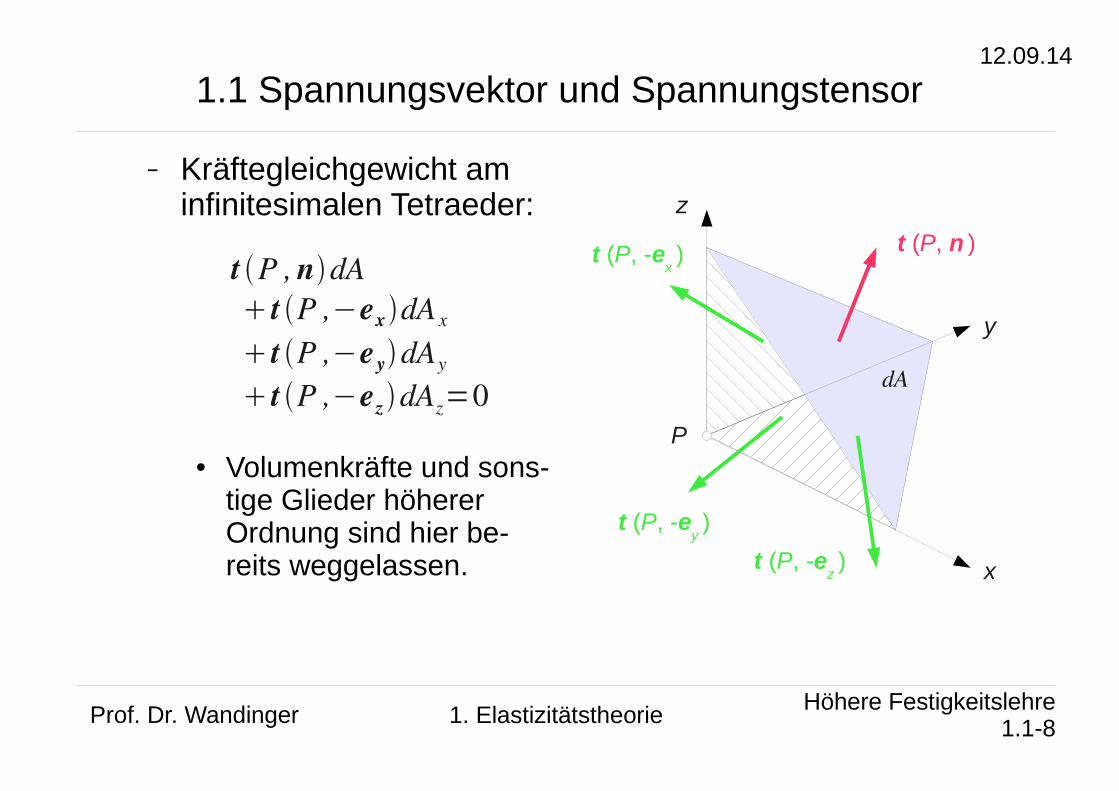
– Kräftegleichgewicht am infinitesimalen Tetraeder:
● Volumenkräfte und sons-tige Glieder höherer Ordnung sind hier be-reits weggelassen. x
y
z
dA
P
t (P, -ex )
t (P, -ey )
t (P, -ez )
t (P, n )
t P ,ndA t P ,−exdA x
t P ,−e ydAy
t P ,−ezdAz=0
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-9
12.09.14
1.1 Spannungsvektor und Spannungstensor
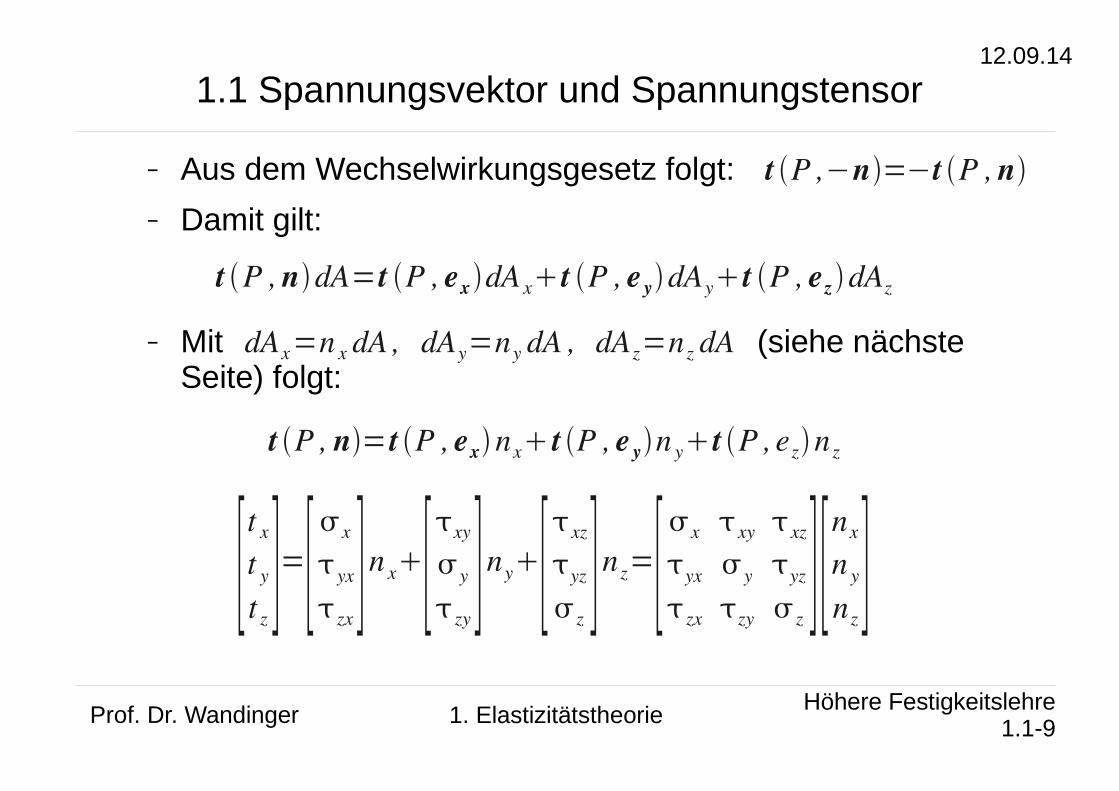
– Aus dem Wechselwirkungsgesetz folgt:
– Damit gilt:
– Mit (siehe nächste Seite) folgt:
t P ,−n=−t P ,n
t P ,ndA=t P , exdA xt P , e ydAyt P , ezdAz
dAx=n x dA , dAy=ny dA , dAz=nz dA
t P , n= t P , exnx t P , e yn y t P , eznz
[t x
t y
t z]=[
x
yx
zx]n x[
xy
y
zy]ny[
xz
yz
z]nz=[
x xy xz
yx y yz
zx zy z][
nx
n y
nz]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-10
12.09.14
1.1 Spannungsvektor und Spannungstensor
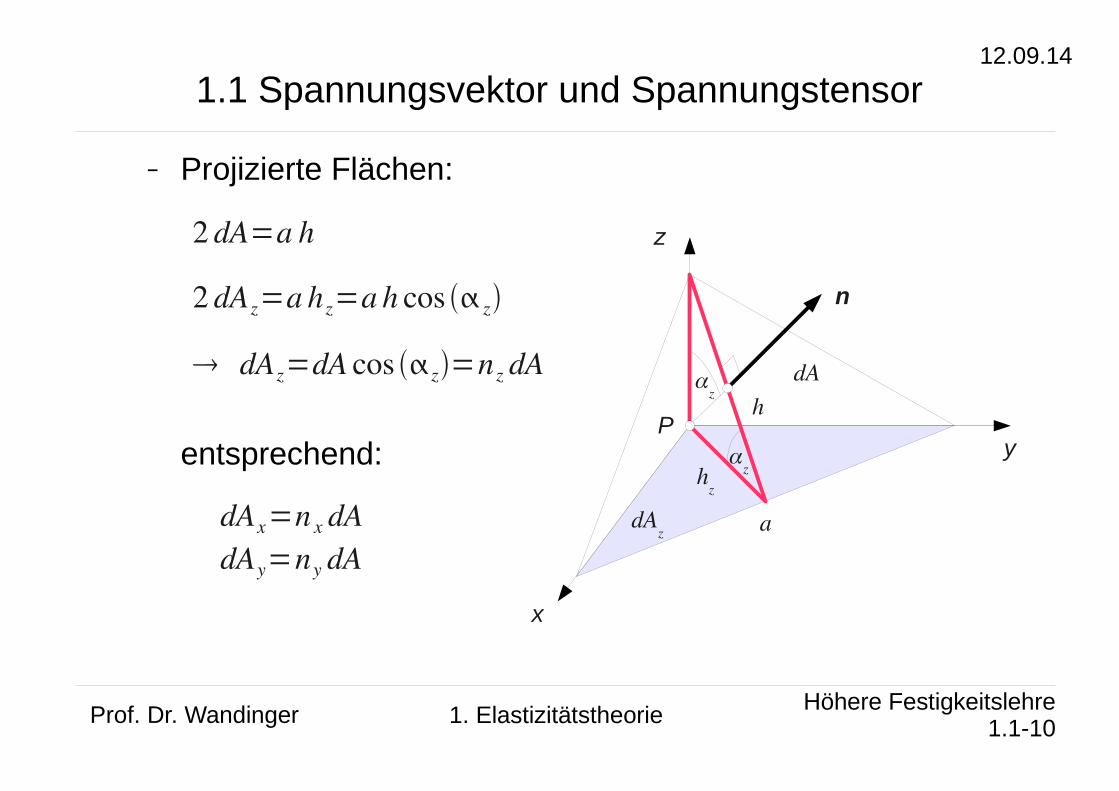
– Projizierte Flächen:
entsprechend:P
x
y
z
dA
dAz
αz
αz
a
hz
h
n
2 dA=a h
2 dAz=a hz=a h cos z
dAz=dA cos z=nz dA
dAx=n x dAdAy=ny dA
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-11
12.09.14
1.1 Spannungsvektor und Spannungstensor
● Spannungstensor:
– Zwischen dem Normalenvektor und dem Spannungsvektor besteht ein linearer Zusammenhang.
– Ein linearer Zusammenhang zwischen zwei Vektoren wird in der Mathematik als Tensor bezeichnet.
– Der Spannungstensor σ beschreibt den Zusammenhang zwischen dem Normalenvektor n und dem Spannungsvek-tor t:
– In einem Koordinatensystem wird der Spannungstensor durch die Spannungsmatrix dargestellt:
t=⋅n
[ t ]= [ ] [n ]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-12
12.09.14
1.1 Spannungsvektor und Spannungstensor
– Der lineare Zusammenhang zwischen Spannungsvektor und Normalenvektor wird als Cauchysche Formel bezeich-net.
● Gesetz der zugeordneten Schubspannungen:
– Aus dem Momentengleichgewicht folgt (s. Kap. 1.5):
– Der Spannungstensor ist symmetrisch. Das bedeutet, dass die Spannungsmatrix in jedem Koordinatensystem symme-trisch ist:
xy=yx , xz=zx , yz=zy
[ ]T= [ ]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-13
12.09.14
1.1 Spannungsvektor und Spannungstensor
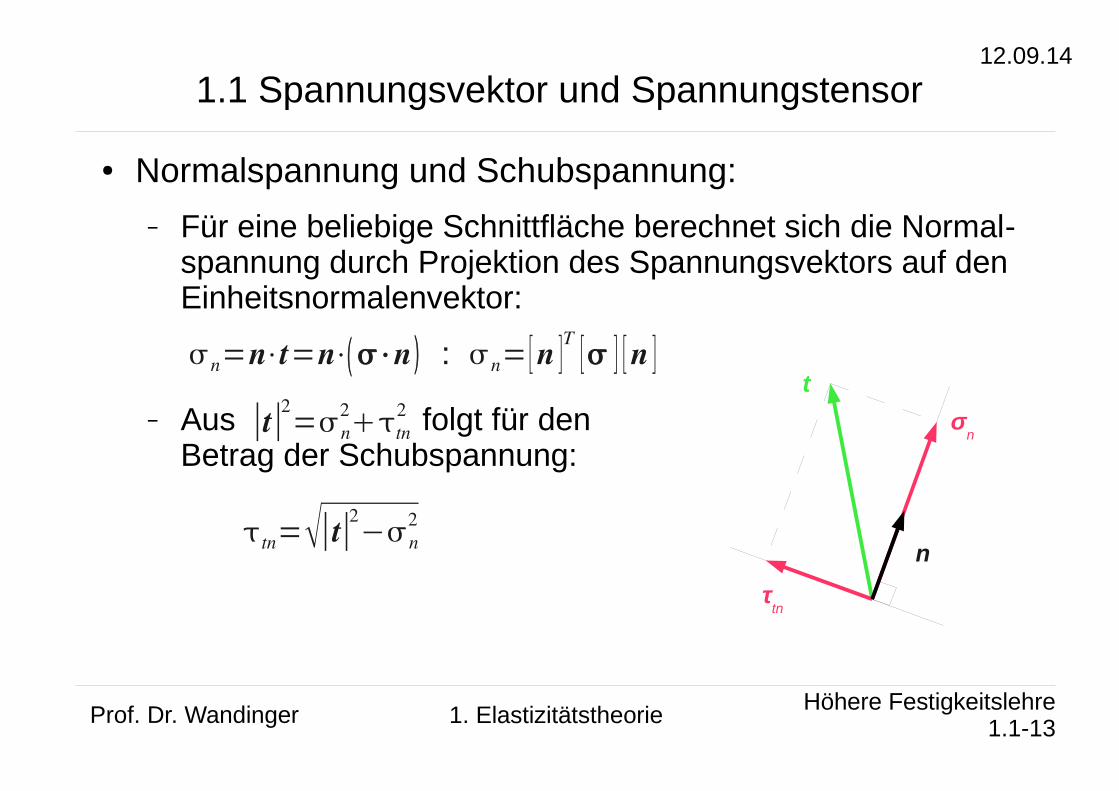
● Normalspannung und Schubspannung:
– Für eine beliebige Schnittfläche berechnet sich die Normal-spannung durch Projektion des Spannungsvektors auf den Einheitsnormalenvektor:
– Aus folgt für den Betrag der Schubspannung:
n=n⋅t=n⋅ ⋅n : n= [n ]T
[ ] [n ]
∣t∣2= n
2tn
2
tn=∣t∣2− n
2
t
n
σn
τtn
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-14
12.09.14
1.1 Spannungsvektor und Spannungstensor
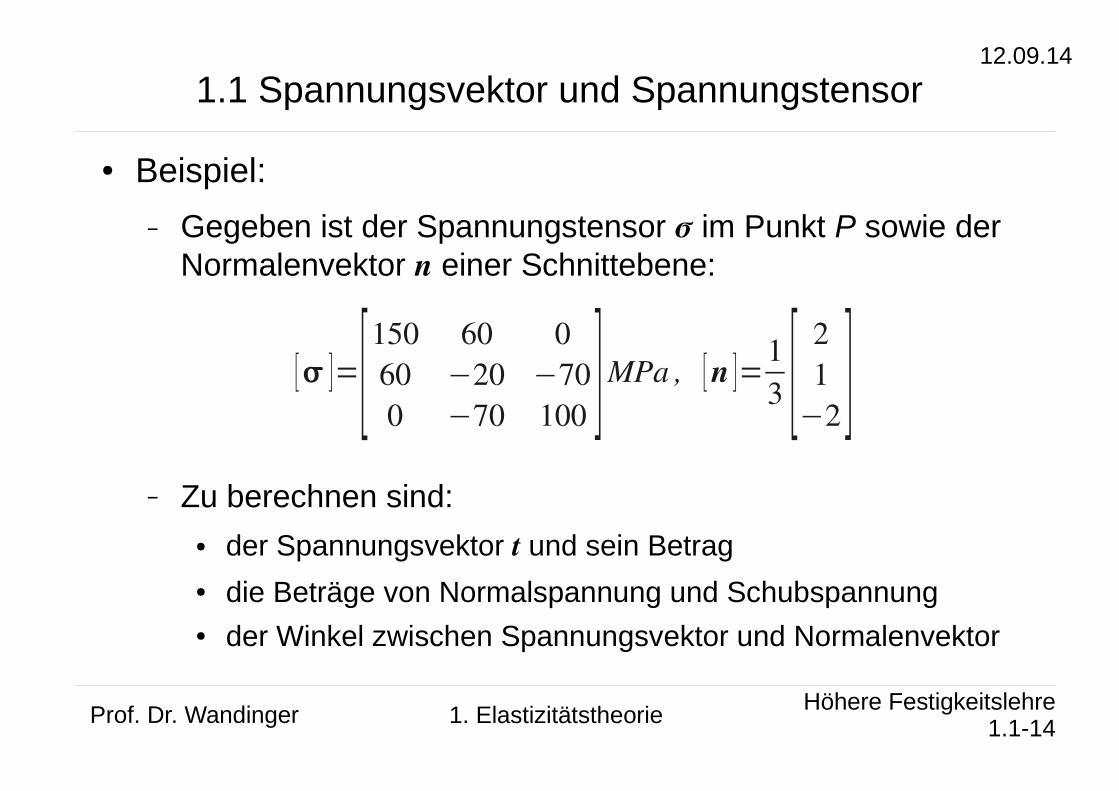
● Beispiel:
– Gegeben ist der Spannungstensor σ im Punkt P sowie der Normalenvektor n einer Schnittebene:
– Zu berechnen sind:● der Spannungsvektor t und sein Betrag● die Beträge von Normalspannung und Schubspannung● der Winkel zwischen Spannungsvektor und Normalenvektor
[ ]=[150 60 060 −20 −700 −70 100 ]MPa , [n ]=
13 [
21
−2 ]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-15
12.09.14
1.1 Spannungsvektor und Spannungstensor
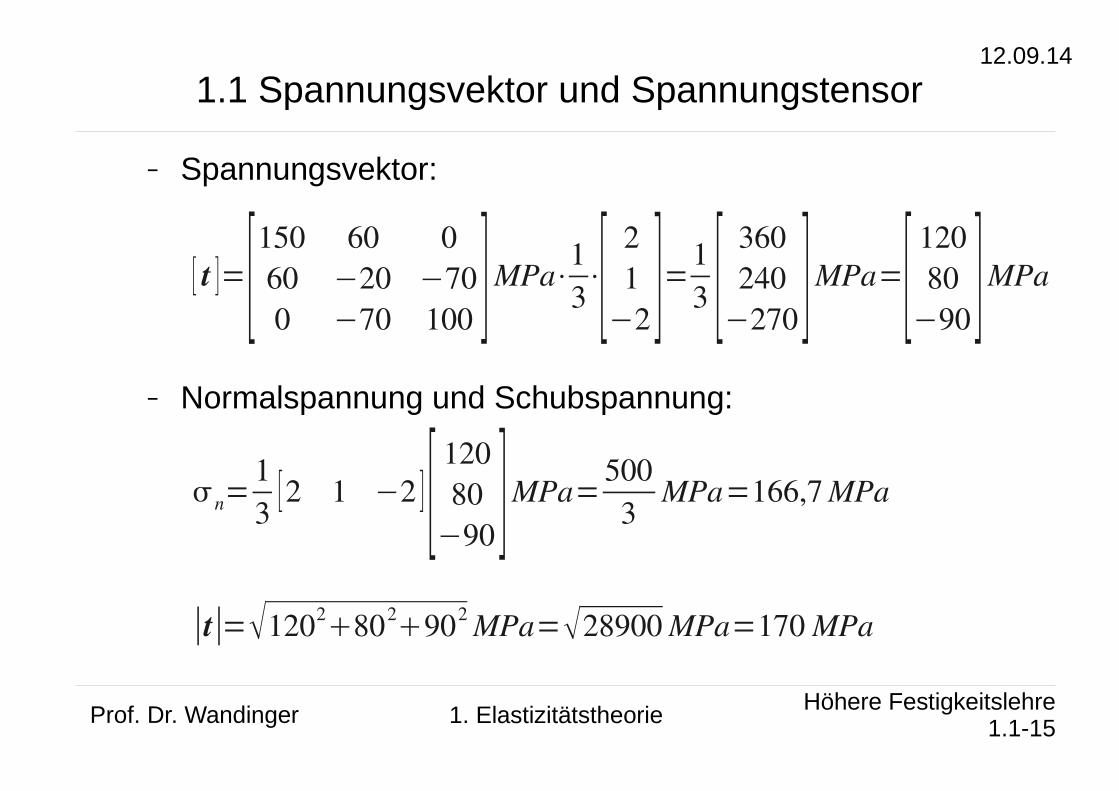
– Spannungsvektor:
– Normalspannung und Schubspannung:
[ t ]=[150 60 060 −20 −700 −70 100 ] MPa⋅1
3⋅[
21
−2 ]=13 [
360240
−270 ]MPa=[12080
−90 ]MPa
n=13
[2 1 −2 ] [12080
−90 ]MPa=500
3MPa=166,7 MPa
∣t∣=1202802
902 MPa=28900 MPa=170 MPa
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-16
12.09.14
1.1 Spannungsvektor und Spannungstensor
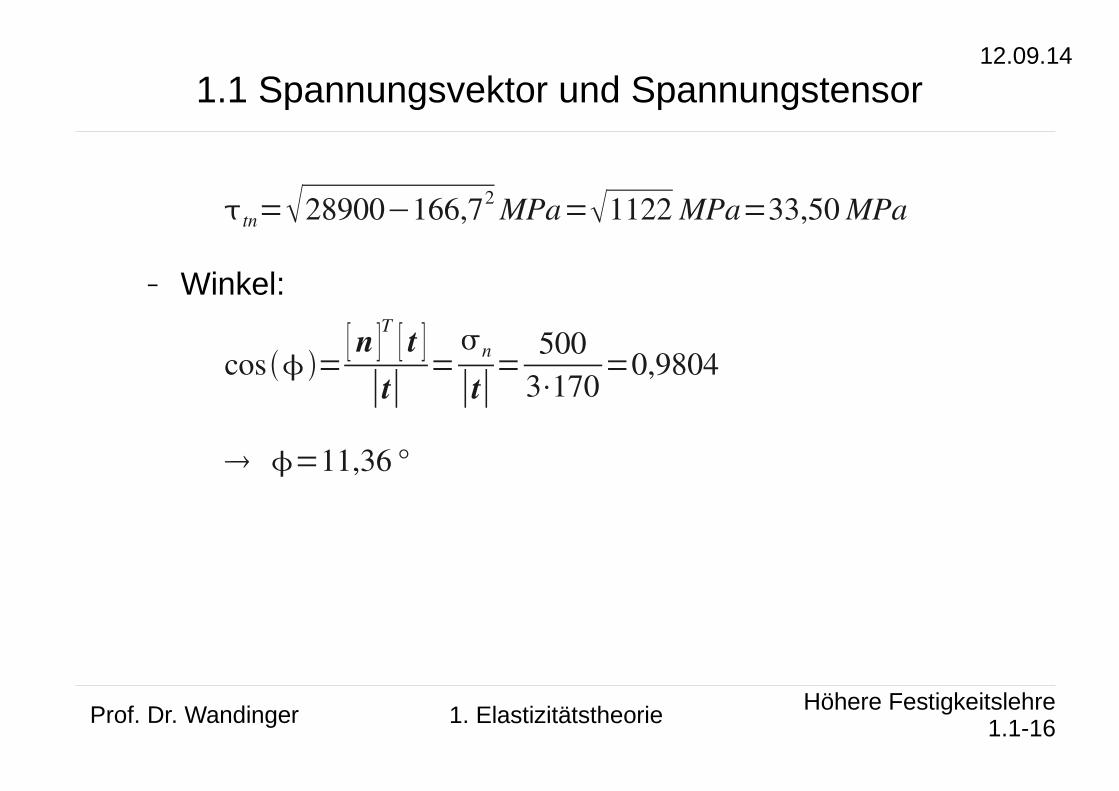
– Winkel:
tn=28900−166,72 MPa=1122 MPa=33,50 MPa
cos=[n ]
T[ t ]
∣t∣=
n
∣t∣=
5003⋅170
=0,9804
=11,36 °
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-17
12.09.14
1.2 Hauptspannungen
● Motivation:
– Der Spannungszustand in einem Punkt wird durch drei Normalspannungen und drei Schubspannungen beschrie-ben, die vom Koordinatensystem abhängen.
– Zur Bewertung der Beanspruchung werden Größen benö-tigt, die nicht vom Koordinatensystem abhängen.
– Insbesondere stellt sich die Frage, für welche Schnittebe-nen Normalspannung bzw. Schubspannung ihren größten Wert annehmen.
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-18
12.09.14
1.2 Hauptspannungen
● Definitionen:
– Eine Schnittebene, auf der der Spannungsvektor senkrecht steht, heißt Hauptebene.
– Die Schubspannung in einer Hauptebene ist null. Der Spannungsvektor ist parallel zum Normalenvektor.
– Die durch den Normalenvektor der Hauptebene definierte Richtung heißt Hauptrichtung.
– Die zugehörige Normalspannung heißt Hauptspannung.
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-19
12.09.14
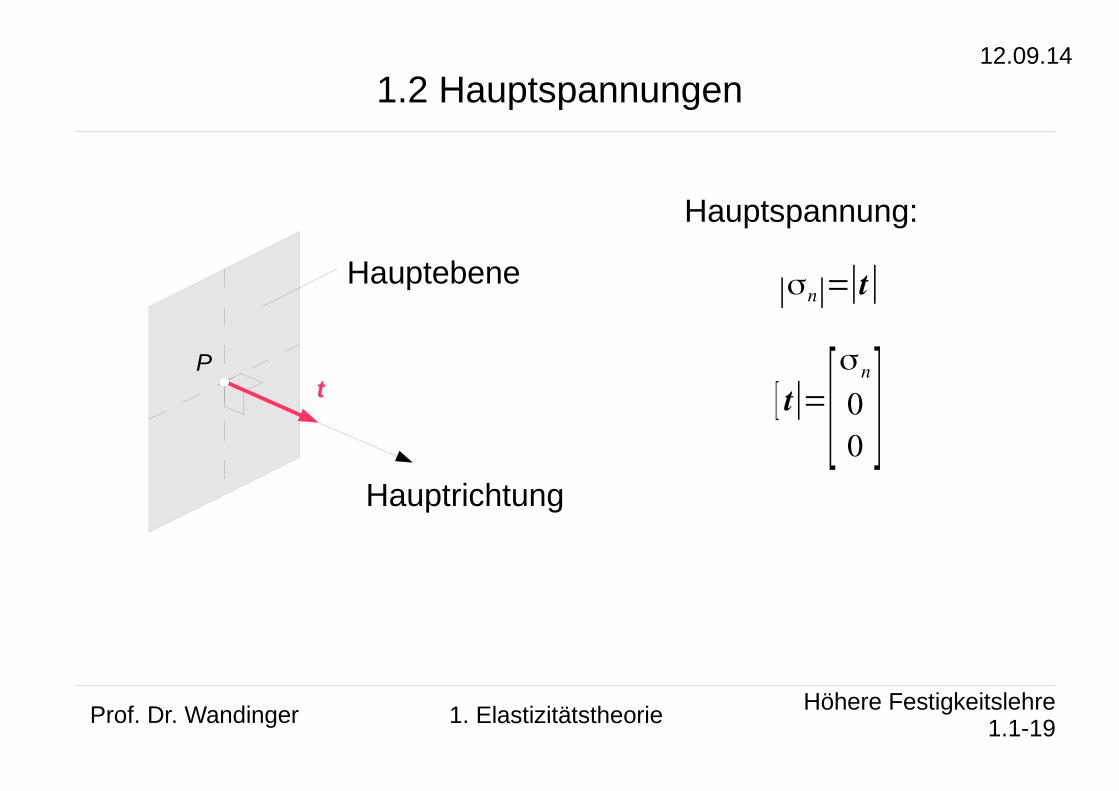
1.2 Hauptspannungen
Hauptebene
Hauptrichtung
tP
Hauptspannung:
∣σn∣=∣t∣
[ t∣=[σn
00 ]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-20
12.09.14
1.2 Hauptspannungen
● Eigenwertproblem:
– Für eine Hauptebene muss gelten:
– In dieser Gleichung ist der Normalenvektor n und die Nor-malspannung σ unbekannt.
– Aufgabenstellungen dieser Art werden in der Mathematik als Eigenwertprobleme bezeichnet.
– Für symmetrische Matrizen gilt:● Es gibt drei reelle Zahlen σ, für die das Eigenwertproblem er-
füllt ist. Sie heißen Eigenwerte.● Die zu den Eigenwerten gehörenden Vektoren n sind eben-
falls reell. Sie heißen Eigenvektoren.
[ ] [n ]= [n ]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-21
12.09.14
1.2 Hauptspannungen
● Eigenvektoren zu verschiedenen Eigenwerten stehen senk-recht aufeinander.
● Haben zwei Eigenwerte den gleichen Wert, so ist jeder Vek-tor, der senkrecht auf dem Eigenvektor zum dritten Eigenwert steht, ein Eigenvektor. Es können also immer drei senkrecht aufeinander stehende Eigenvektoren gefunden werden.
● Die Länge der Eigenvektoren ist frei wählbar.● Werden die Eigenvektoren so gewählt, dass sie die Länge
eins haben, dann definieren sie ein kartesisches Koordina-tensystem, das sogenannte Hauptachsensystem.
● Die Einheitsvektoren des Hauptachsensystems werden im Folgenden mit e
1, e
2 und e
3 bezeichnet.
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-22
12.09.14
1.2 Hauptspannungen
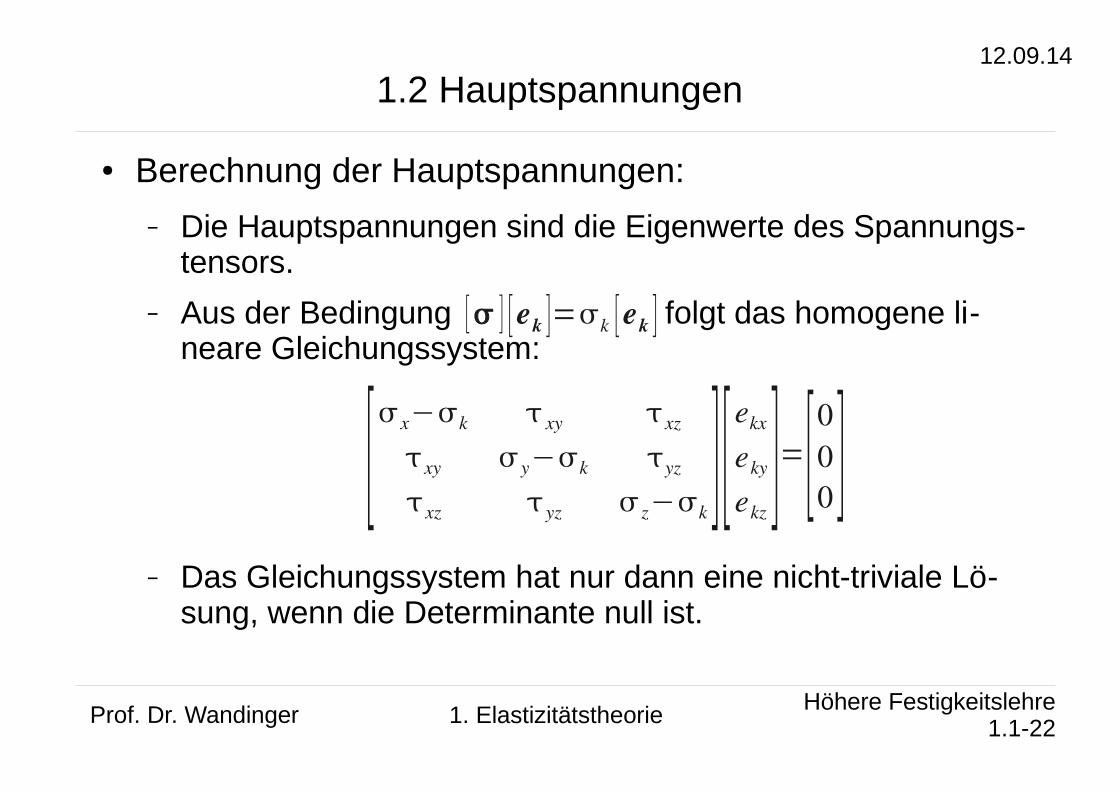
● Berechnung der Hauptspannungen:
– Die Hauptspannungen sind die Eigenwerte des Spannungs-tensors.
– Aus der Bedingung folgt das homogene li-neare Gleichungssystem:
– Das Gleichungssystem hat nur dann eine nicht-triviale Lö-sung, wenn die Determinante null ist.
[ ] [ek ]=k [ek ]
[ x−k xy xz
xy y−k yz
xz yz z−k][
ekx
eky
ekz]=[
000 ]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-23
12.09.14
1.2 Hauptspannungen
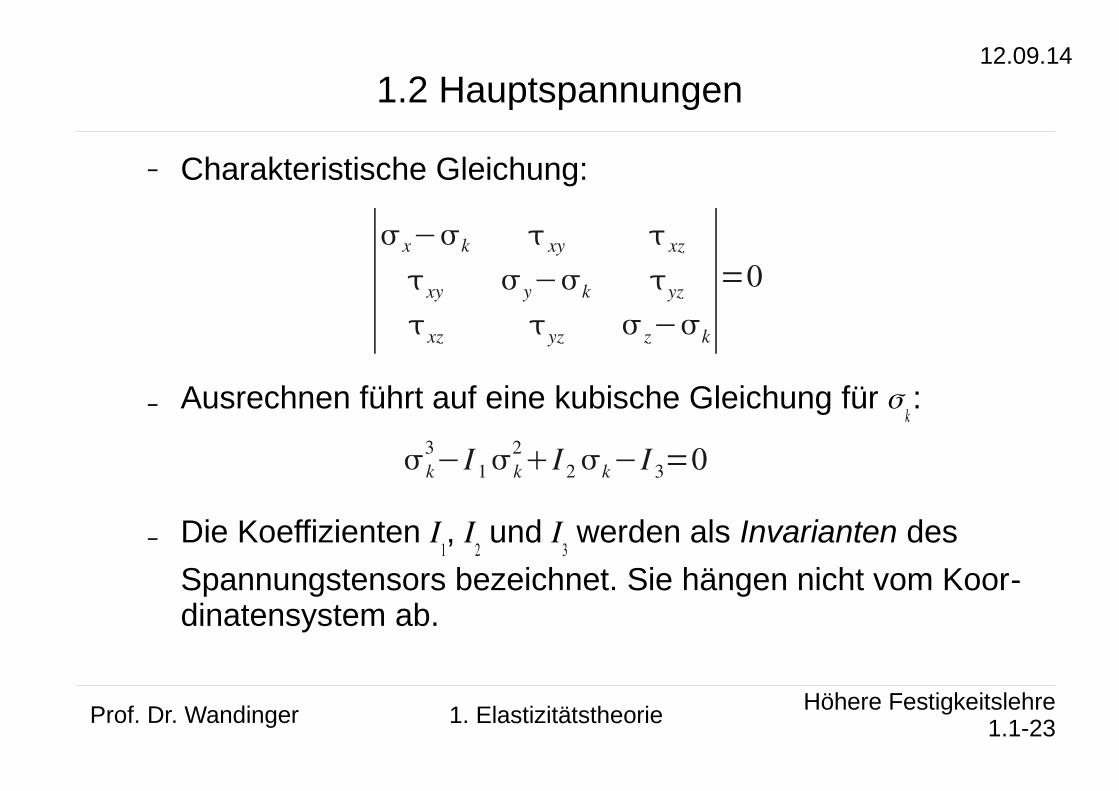
– Charakteristische Gleichung:
– Ausrechnen führt auf eine kubische Gleichung für σk :
– Die Koeffizienten I1, I
2 und I
3 werden als Invarianten des
Spannungstensors bezeichnet. Sie hängen nicht vom Koor-dinatensystem ab.
∣ x−k xy xz
xy y−k yz
xz yz z−k∣=0
k3−I 1 k
2I 2 k−I 3=0
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-24
12.09.14
1.2 Hauptspannungen
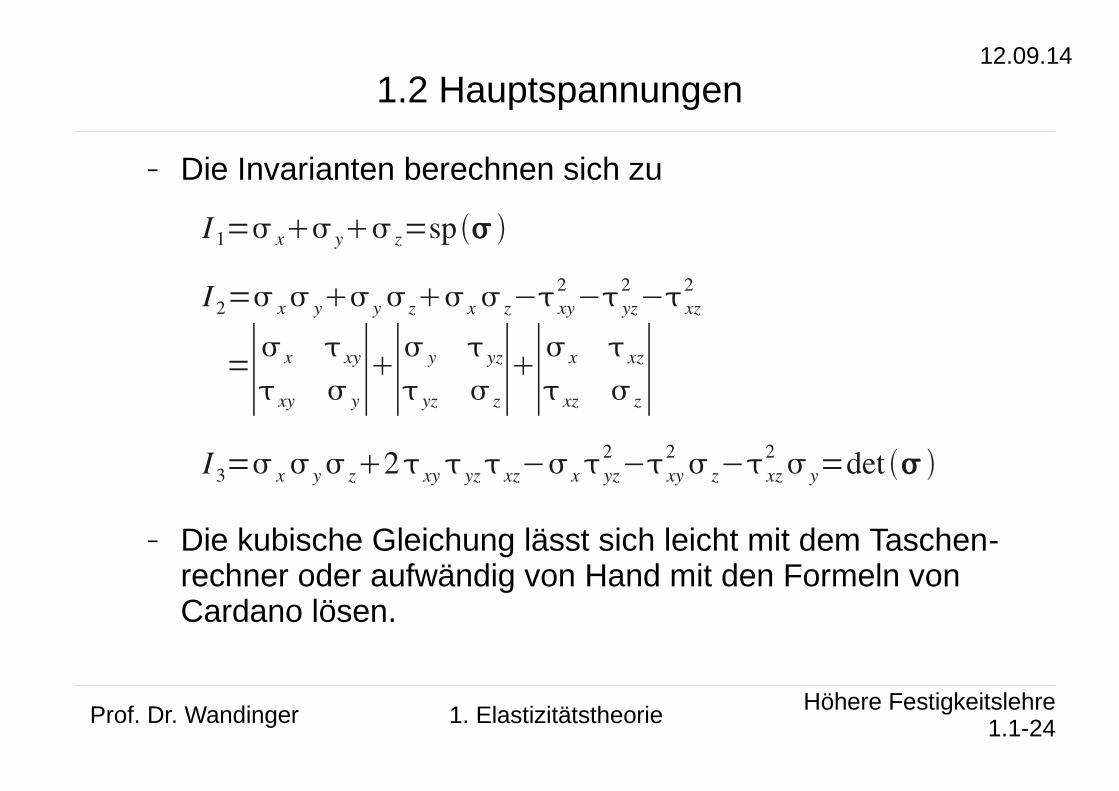
– Die Invarianten berechnen sich zu
– Die kubische Gleichung lässt sich leicht mit dem Taschen-rechner oder aufwändig von Hand mit den Formeln von Cardano lösen.
I 1= x y z=sp
I 2= x y y z x z− xy2− yz
2− xz
2
=∣ x xy
xy y∣∣ y yz
yz z∣∣ x xz
xz z∣I 3= x y z2 xy yz xz− x yz
2− xy
2 z− xz
2 y=det
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-25
12.09.14
1.2 Hauptspannungen
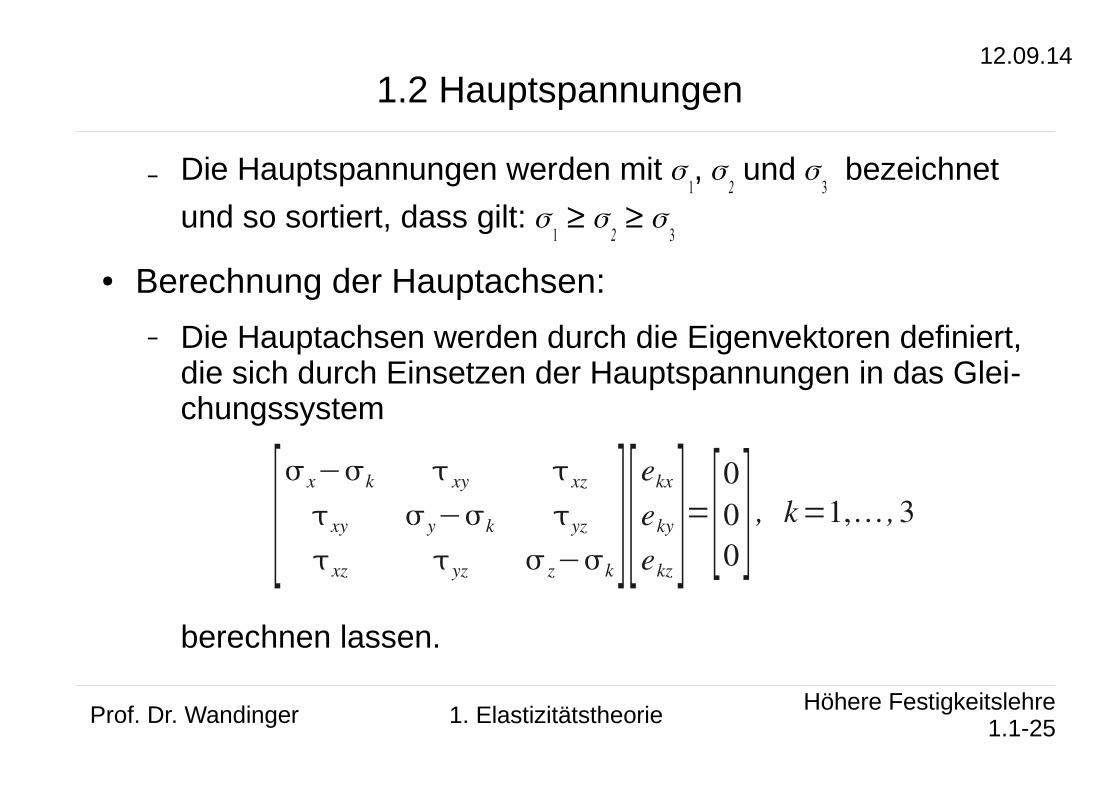
– Die Hauptspannungen werden mit σ1, σ
2 und σ
3 bezeichnet
und so sortiert, dass gilt: σ1 ≥ σ
2 ≥ σ
3
● Berechnung der Hauptachsen:
– Die Hauptachsen werden durch die Eigenvektoren definiert, die sich durch Einsetzen der Hauptspannungen in das Glei-chungssystem
berechnen lassen.
[ x−k xy xz
xy y−k yz
xz yz z−k][
ekx
eky
ekz]=[
000 ] , k=1, , 3
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-26
12.09.14
1.2 Hauptspannungen
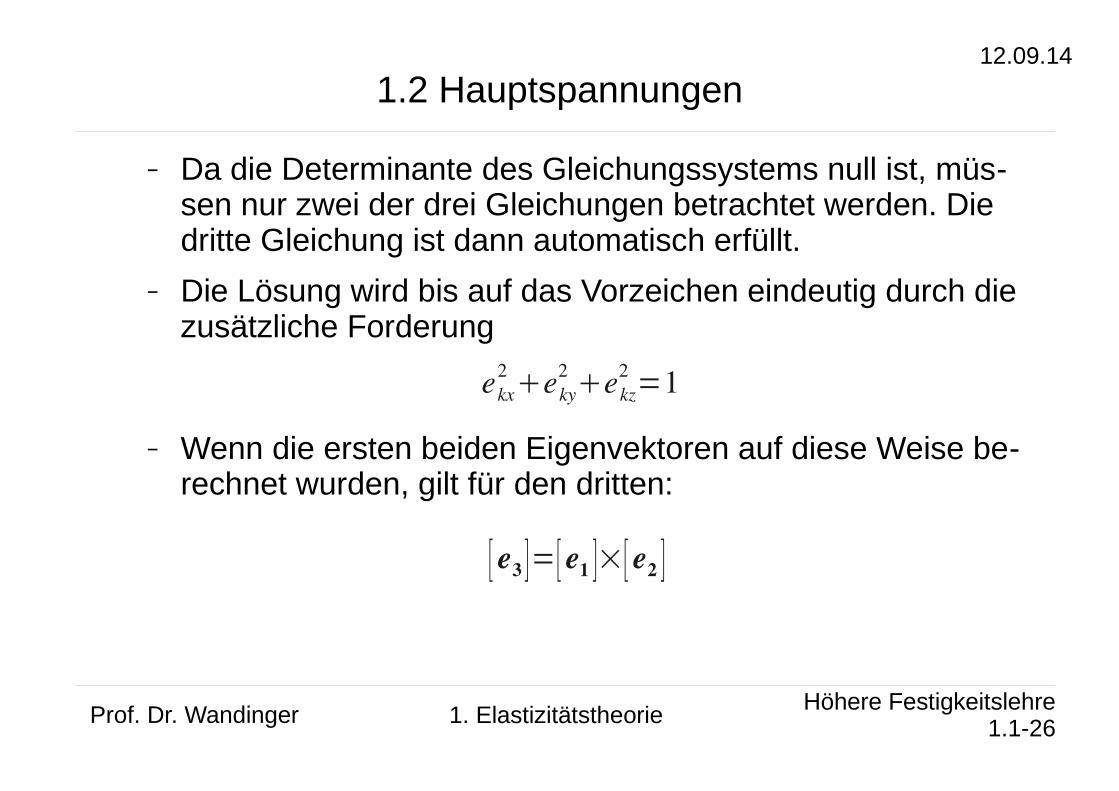
– Da die Determinante des Gleichungssystems null ist, müs-sen nur zwei der drei Gleichungen betrachtet werden. Die dritte Gleichung ist dann automatisch erfüllt.
– Die Lösung wird bis auf das Vorzeichen eindeutig durch die zusätzliche Forderung
– Wenn die ersten beiden Eigenvektoren auf diese Weise be-rechnet wurden, gilt für den dritten:
ekx2eky
2ekz
2=1
[ e3 ]=[ e1 ]×[ e2 ]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-27
12.09.14
1.2 Hauptspannungen
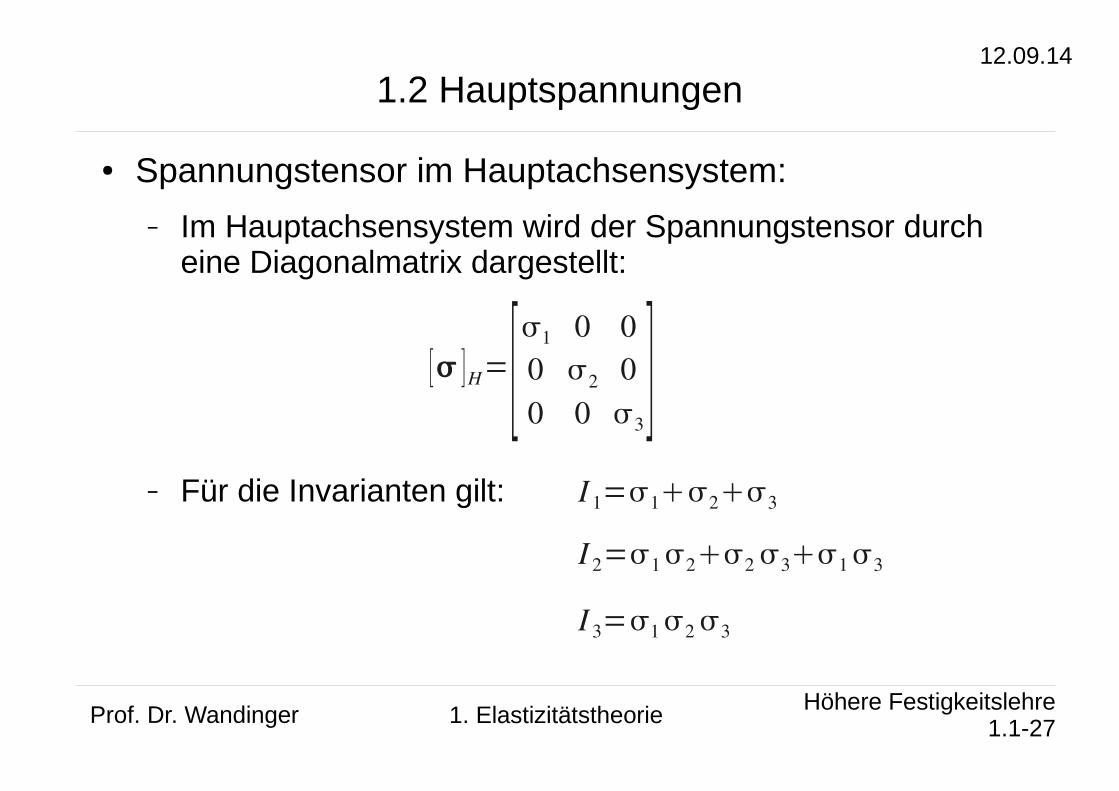
● Spannungstensor im Hauptachsensystem:
– Im Hauptachsensystem wird der Spannungstensor durch eine Diagonalmatrix dargestellt:
– Für die Invarianten gilt:
[ ]H=[1 0 00 2 00 0 3
]I 1=123
I 2=122 313
I 3=12 3
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-28
12.09.14
1.2 Hauptspannungen
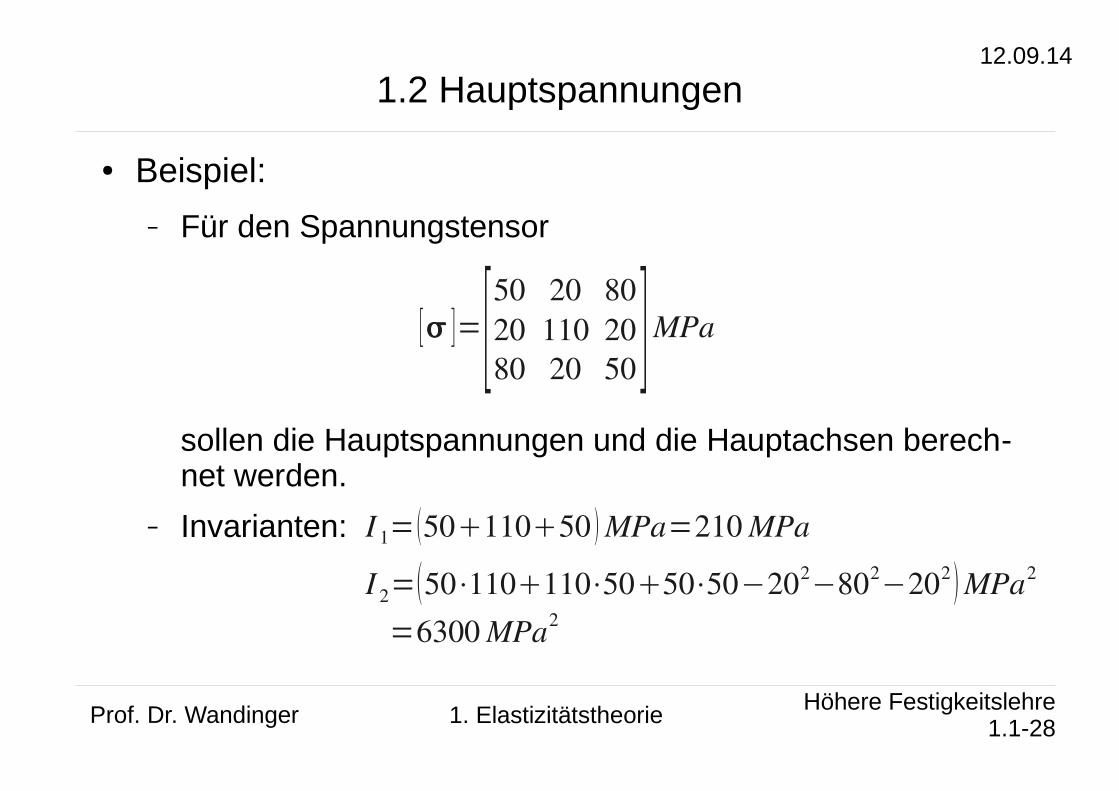
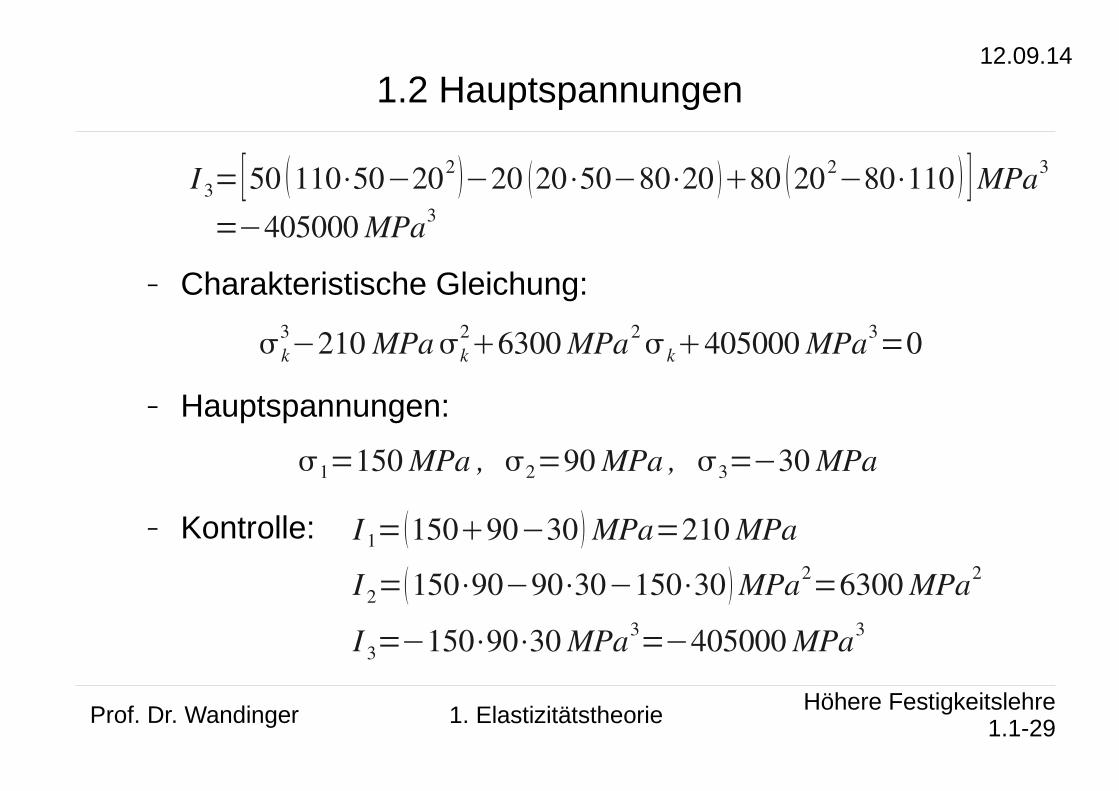
● Beispiel:
– Für den Spannungstensor
sollen die Hauptspannungen und die Hauptachsen berech-net werden.
– Invarianten:
[ ]=[50 20 8020 110 2080 20 50 ] MPa
I 1= 5011050 MPa=210 MPa
I 2=50⋅110110⋅5050⋅50−202−802−202 MPa2
=6300 MPa2
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-29
12.09.14
1.2 Hauptspannungen
– Charakteristische Gleichung:
– Hauptspannungen:
– Kontrolle:
I 3=[50 110⋅50−202 −20 20⋅50−80⋅20 80 202−80⋅110 ] MPa3
=−405000 MPa3
k3−210 MPak
26300 MPa2
k405000 MPa3=0
1=150 MPa , 2=90 MPa , 3=−30 MPa
I 1= 15090−30 MPa=210 MPa
I 2=150⋅90−90⋅30−150⋅30 MPa2=6300 MPa2
I 3=−150⋅90⋅30 MPa3=−405000 MPa3
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-30
12.09.14
1.2 Hauptspannungen
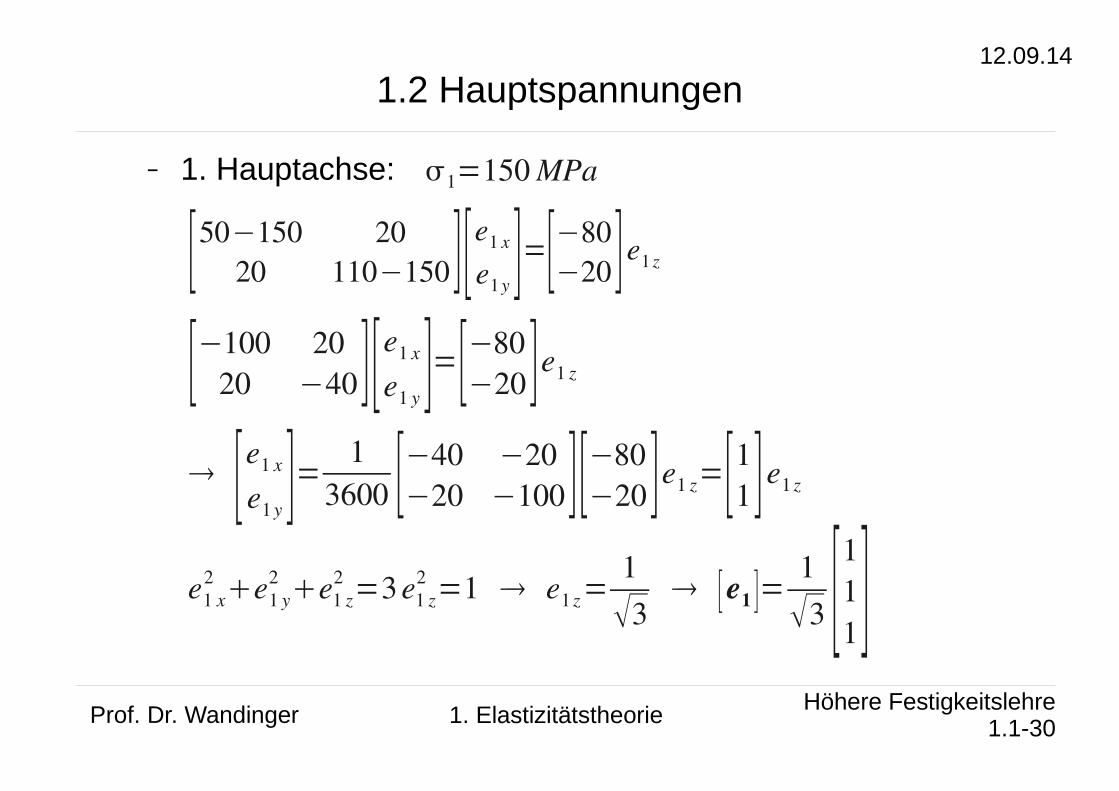
– 1. Hauptachse:
e1 x2 e1 y
2 e1 z2 =3e1 z
2 =1 e1 z=1
3 [e1 ]=
1
3 [111]
1=150 MPa
[50−150 2020 110−150 ][e1 x
e1y ]=[−80−20 ]e1 z
[−100 2020 −40 ][e1 x
e1 y ]=[−80−20 ]e1 z
[e1 x
e1y ]=1
3600 [−40 −20−20 −100 ][−80
−20 ]e1 z=[11]e1 z
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-31
12.09.14
1.2 Hauptspannungen
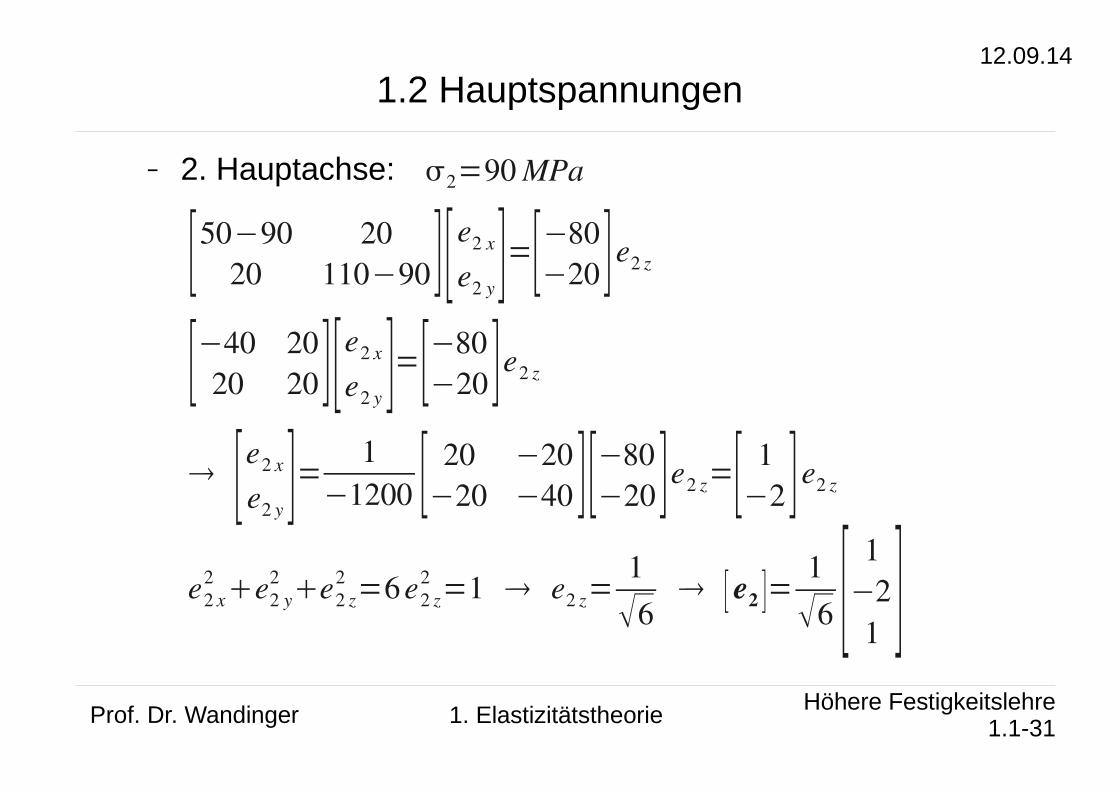
– 2. Hauptachse:
e2 x2 e2 y
2 e2 z2 =6e2 z
2 =1 e2 z=1
6 [ e2 ]=
1
6 [1
−21 ]
2=90 MPa
[50−90 2020 110−90 ][e2 x
e2 y]=[−80−20 ]e2 z
[−40 2020 20 ][e2 x
e2 y ]=[−80−20 ]e2 z
[e2 x
e2 y ]=1
−1200 [ 20 −20−20 −40 ][−80
−20 ]e2 z=[ 1−2 ]e2 z
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-32
12.09.14
1.2 Hauptspannungen
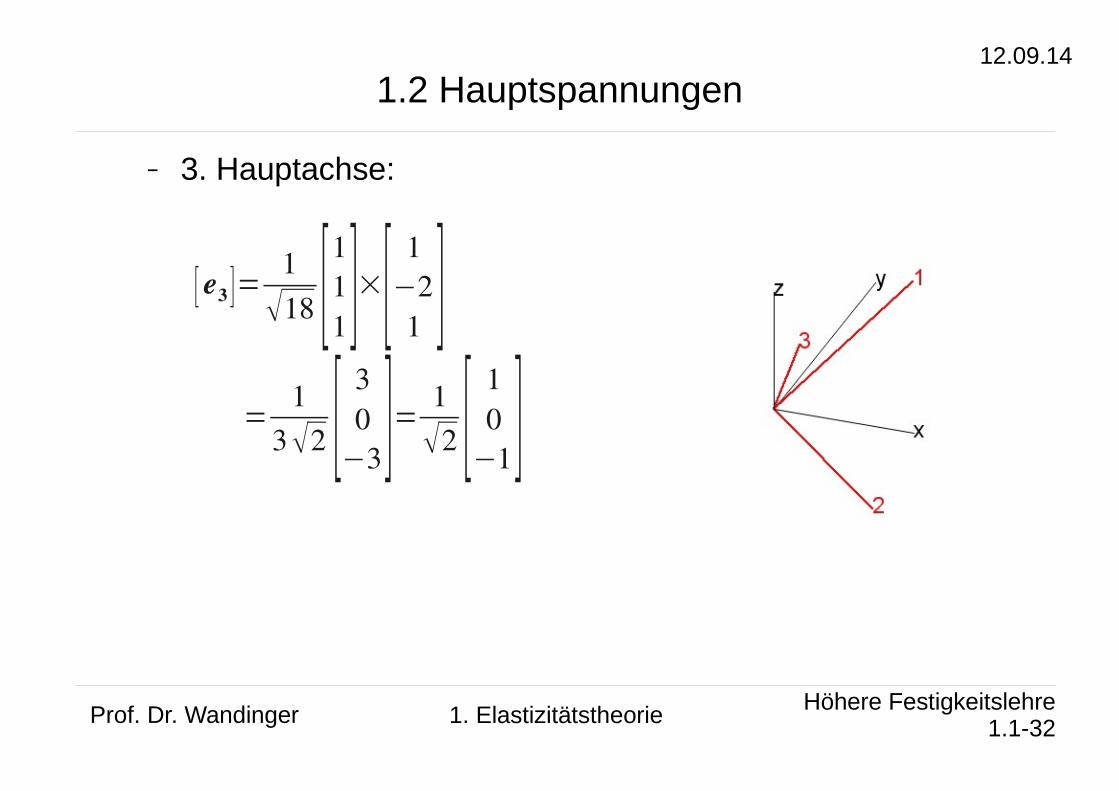
– 3. Hauptachse:
[ e3 ]=1
18 [111]×[
1−21 ]
=1
32 [30
−3]= 1
2 [10
−1]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-33
12.09.14
1.3 Mohrsche Spannungskreise
● Der Spannungszustand in einem Punkt wird vollständig durch die Hauptspannungen und die Hauptrichtungen be-schrieben.
● Welche Spannungen in beliebigen Schnittflächen auftre-ten können, lässt sich anschaulich an den Mohrschen Spannungskreisen ablesen.
● Im Gegensatz zum ebenen Spannungszustand gehören zum räumlichen Spannungszustand drei Mohrsche Krei-se.
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-34
12.09.14
1.3 Mohrsche Spannungskreise
σ3
σ2
σ1
σ
τ
τmax
M12
M13
M13
M23
A
B
C
2α1
2α3
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-35
12.09.14
1.3 Mohrsche Spannungskreise
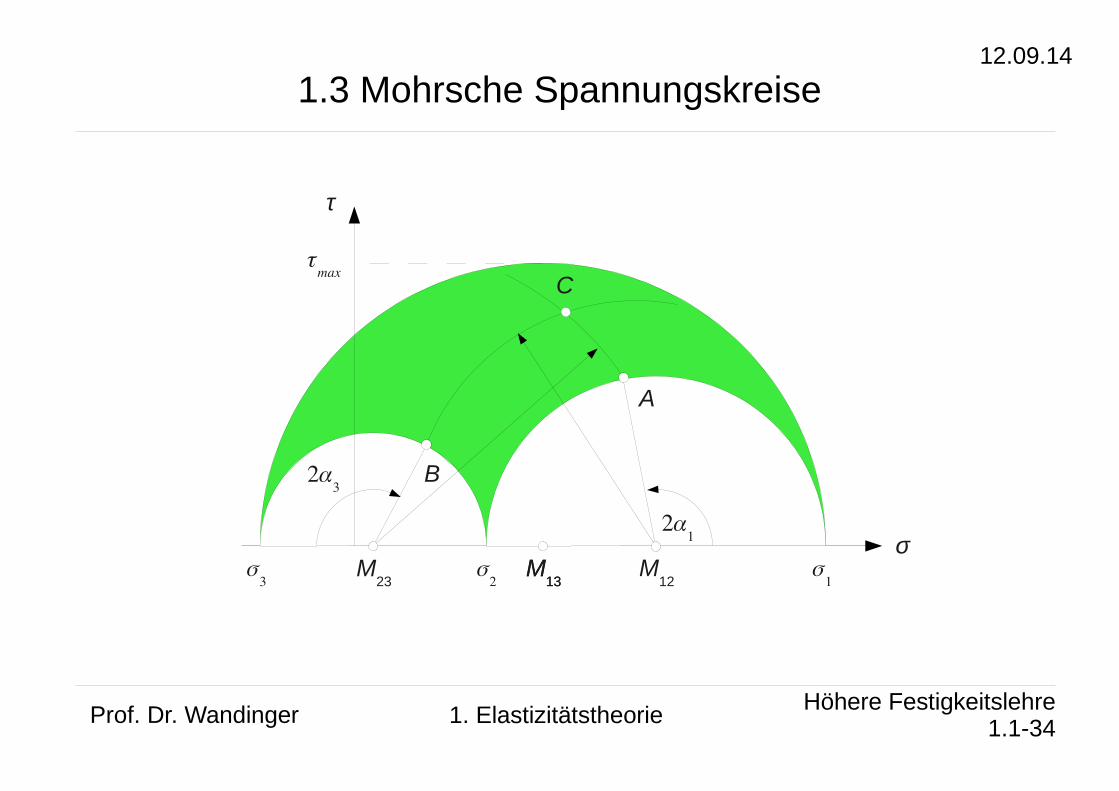
● Konstruktion:
– Jeder der drei Mohrschen Kreise schneidet die σ-Achse in jeweils zwei Hauptspannungen.
– Die Mittelpunkte der Mohrschen Kreise liegen auf der σ-Achse.
– Mögliche Kombinationen von Normalspannung und Schub-spannung in einer Schnittebene liegen in dem grünen Ge-biet, das sich ergibt, wenn vom Gebiet des größten Kreises die Gebiete der beiden kleineren Kreise abgezogen werden.

Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-36
12.09.14
1.3 Mohrsche Spannungskreise
● Spannungen in einer Schnittebene:
– Für eine Schnittebene mit dem Normalenvektor
lassen sich die Normalspannung und die Schubspannung wie folgt ermitteln:
● Die Punkte A und B liegen auf den Kreisen mit den Mittel-punkten M
12 bzw. M
23. Der Winkel 2α
1 wird positiv im Gegen-
uhrzeigersinn und der Winkel 2α3 positiv im Uhrzeigersinn
aufgetragen.
● Der Punkt C liegt im Schnittpunkt des Kreises um M23 durch
den Punkt A mit dem Kreis um M12 durch den Punkt B.
[n ]HT=[ n1 n2 n3 ]=[cos 1 cos 2 cos 3]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-37
12.09.14
1.3 Mohrsche Spannungskreise
● Folgerungen:
– Die größte Hauptspannung σ1 ist die größtmögliche Normal-
spannung und die kleinste Hauptspannung σ3 ist die
kleinstmögliche Normalspannung.
– Die größtmögliche Schubspannung ist
– Wenn sich die drei Hauptspannungen nur wenig unter-scheiden, ist die größtmögliche Schubspannung klein.
max=1−3
2
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-38
12.09.14
1.3 Mohrsche Spannungskreise
● Hintergrund:
– Ausgangspunkt für die Theorie der Mohrschen Spannungs-kreise ist das Gleichungssystem
– Dieses lineare Gleichungssystem wird nach den Kompo-nenten n
1 , n
2 und n
3 des Normalenvektors aufgelöst.
n12
n22
n32
= 1
1 n12 2 n2
2 3 n32 = n
12 n1
2 2
2 n22
32 n3
2= n
2tn
2
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-39
12.09.14
1.3 Mohrsche Spannungskreise
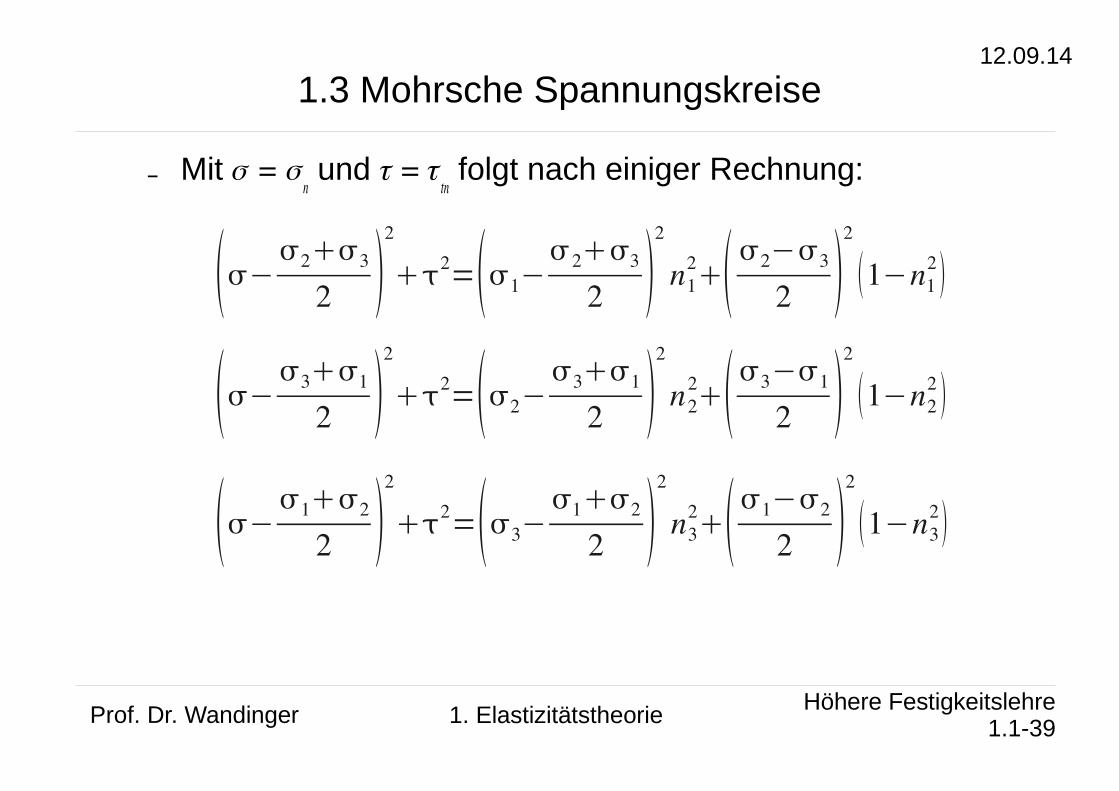
– Mit σ = σn und τ = τ
tn folgt nach einiger Rechnung:
−23
2 2
2=1− 23
2 2
n122−3
2 2
1−n12
−31
2 2
2=2−31
2 2
n223−1
2 2
1−n22
−12
2 2
2=3−12
2 2
n321−2
2 2
1−n32
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-40
12.09.14
1.3 Mohrsche Spannungskreise
– Diese Gleichungen beschreiben Kreisscharen in der σ-τ-Ebene mit den Mittelpunkten
– Die rechten Seiten der Gleichungen definieren die Radien der Kreise in Abhängigkeit von n
1, n
2 bzw. n
3.
– Wegen 0 ≤ n2k ≤ 1 liegt jede der Kreisscharen innerhalb ei-
nes Rings. Ein Spannungspunkt (σ, τ) muss in der Schnitt-menge der drei Kreisscharen liegen.
M 23=23
2, 0 , M 13=31
2, 0 und M 12=12
2, 0 .
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-41
12.09.14
1.3 Mohrsche Spannungskreise
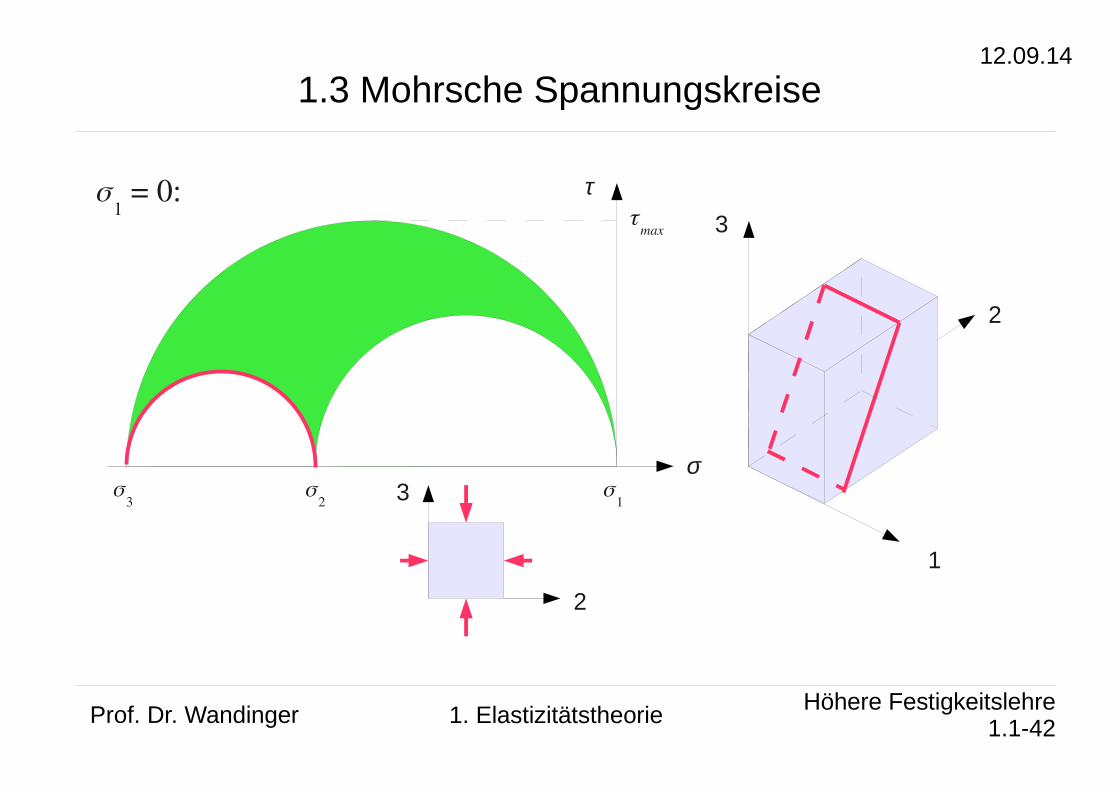
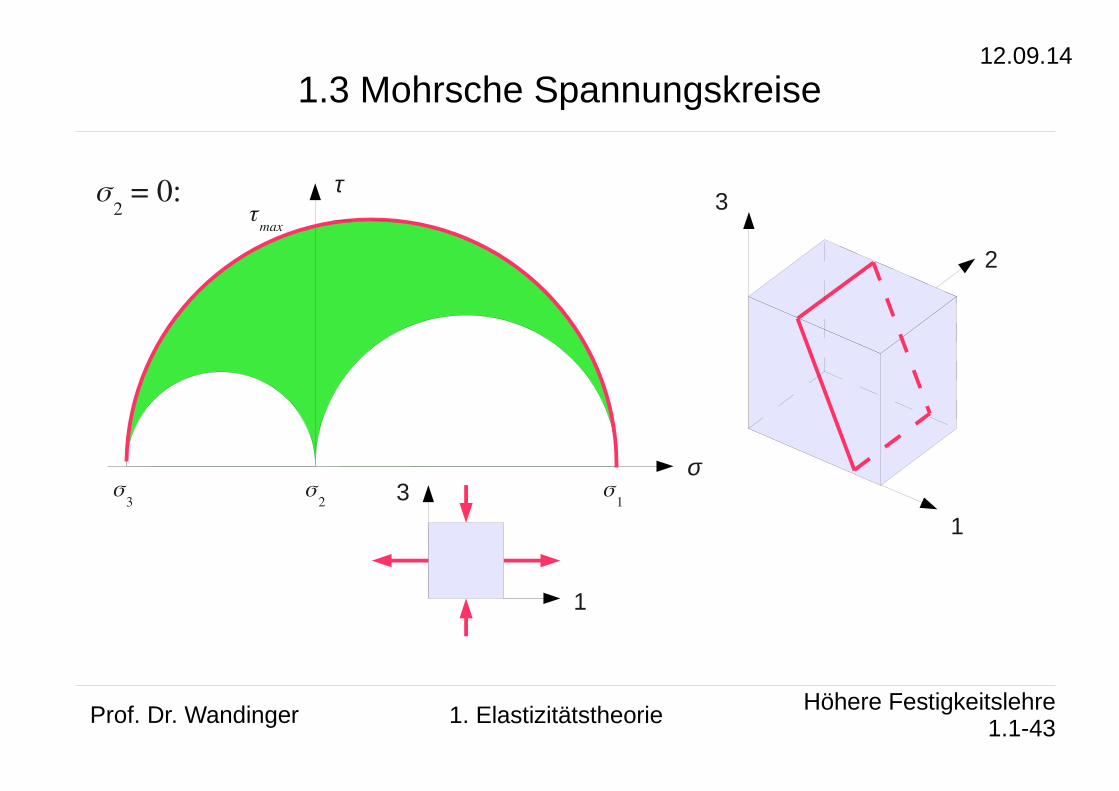
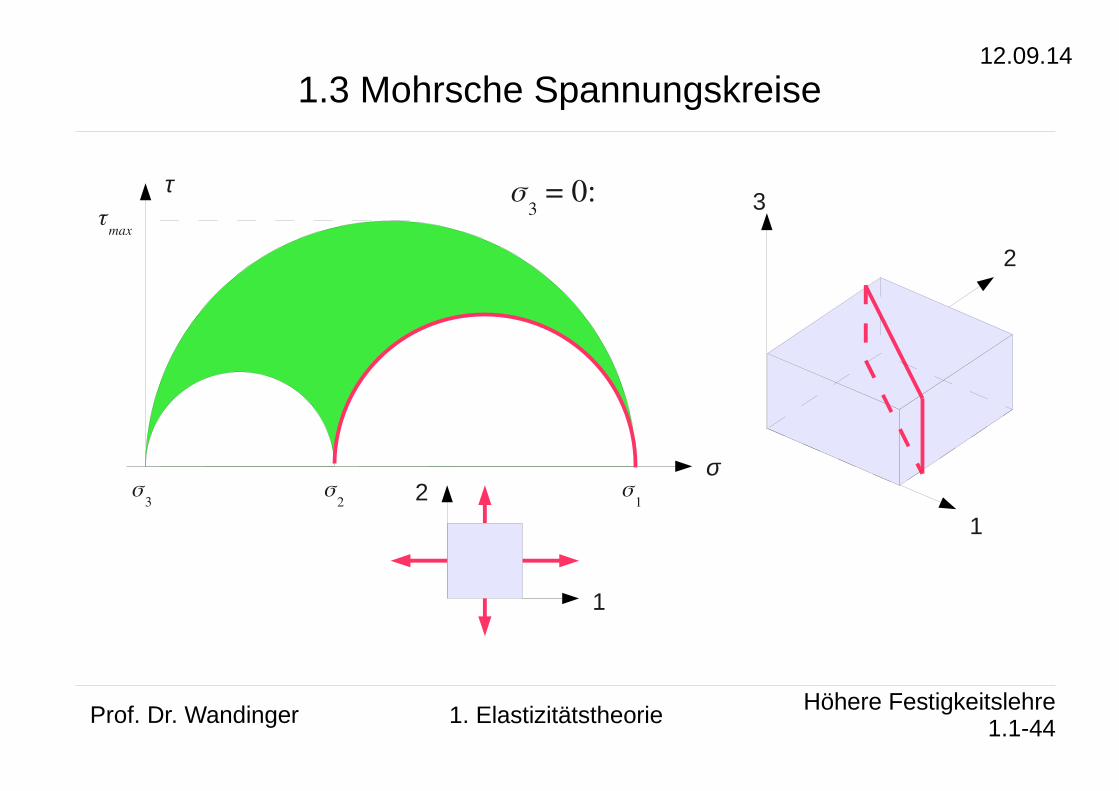
● Ebener Spannungszustand:
– Beim ebenen Spannungszustand ist eine der drei Haupt-spannungen null.
– Spannungspunkte in einer Schnittebene senkrecht zu der Ebene, die von den Hauptachsen aufgespannt wird, deren Hauptspannungen nicht null sind, liegen auf dem Mohr-schen Spannungskreis durch die beiden von null verschie-denen Hauptspannungen.
– In den folgenden Abbildungen ist jeweils eine solcheSchnittebene rot eingezeichnet.
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-42
12.09.14
1.3 Mohrsche Spannungskreise
σ3
σ2
σ1
σ
τ
1
2
3σ
1 = 0:
2
3
τmax
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-43
12.09.14
1.3 Mohrsche Spannungskreise
σ3
σ2
σ1
σ
τ
1
2
3σ2 = 0:
1
3
τmax
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-44
12.09.14
1.3 Mohrsche Spannungskreise
σ3
σ2
σ1
σ
τ
1
2
3σ3 = 0:
1
2
τmax
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-45
12.09.14
1.4 Fließbedingung
● Hydrostatischer Spannungszustand:
– Ein Spannungszustand, bei dem alle drei Hauptspannungen den gleichen Wert haben, heißt hydrostatischer Span-nungszustand:
– Bei einem hydrostatischen Spannungszustand ist jede Rich-tung eine Hauptrichtung.
– Der Spannungstensor wird in jedem Koordinatensystem durch eine Diagonalmatrix dargestellt:
1= 2=3=0
[ ]=[0 0 00 0 00 0 0
]=0 [1 0 00 1 00 0 1 ]=0 [ I ]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-46
12.09.14
1.4 Fließbedingung
– Die Mohrschen Kreise sind Punkte. Die Schubspannung ist in jeder Schnittebene null.
– Da Fließen durch die Schubspannung verursacht wird, kann bei einem hydrostatischen Spannungszustand kein Fließen auftreten.
– Ein hydrostatischer Spannungszustand kann auch bei ei-nem duktilen Werkstoff einen Trennbruch verursachen.
● Spannungsdeviator:
– Jeder Spannungstensor σ lässt sich in einen hydrostati-schen Anteil σ
h und einen deviatorischen Anteil σ
d aufspal-
ten: = h d
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-47
12.09.14
1.4 Fließbedingung
– Der hydrostatische Anteil ist definiert durch
mit der mittleren Normalspannung
[ h ]=[m 0 00 m 00 0 m
]m=
13 x y z =
13 123 =
13
sp
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-48
12.09.14
1.4 Fließbedingung
– Für den deviatorischen Anteil folgt:
– Im Hauptachsensystem gilt:
[ d ]=[ ]−[ h ]=[ x−m xy xz
xy y−m yz
xz yz z−m]
[ d ]H=[1−m 0 0
0 2−m 00 0 3−m
]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-49
12.09.14
1.4 Fließbedingung
– Der deviatorische Anteil des Spannungstensors ist ebenfalls ein symmetrischer Tensor. Er wird als Spannungsdeviator bezeichnet.
– Für die Invarianten des Spannungsdeviators gilt:
I d 1=sp d =0
I d 2=1−m 2−m 2−m 3−m 3−m 1−m
=−16 [ 1−2
22−3
23−1
2 ]
=−16 [ x− y
2 y− z
2 z− x
2 ]−xy2−yz
2−xz
2
I d 3=det d
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-50
12.09.14
1.4 Fließbedingung
● Fließbedingung:
– Die Fließbedingung ist ein Kriterium dafür, ob bei einem ge-gebenen Spannungszustand Fließen auftritt.
– Für einen einachsigen Spannungszustand gilt:● Elastischer Zustand (kein Fließen):● Plastischer Zustand (Fließen):
– Die Verallgemeinerung auf einen räumlichen Spannungszu-stand ist:
● Elastischer Zustand (kein Fließen):● Plastischer Zustand (Fließen):
2Re2
2=Re2
f k
f =k
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-51
12.09.14
1.4 Fließbedingung
– Dabei ist eine skalarwertige positive Funktion des Spannungstensors und k eine Kon-stante, die vom Material abhängt.
– Da der hydrostatische Anteil keinen Einfluss auf das Fließen hat, muss gelten:
– Bei einem isotropen Material muss die Fließbedingung un-abhängig vom Koordinatensystem sein. Sie hängt daher nur von den Invarianten des Spannungsdeviators ab:
f = f x , y , z ,xy , yz , xz
f = f d
f d = f I d 2 , I d 3
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-52
12.09.14
1.4 Fließbedingung
– Die einfachste Fließbedingung lautet (von Mises, 1913):
– Einsetzen der Formel für die zweite Invariante des Span-nungsdeviators ergibt
– Für den einachsigen Spannungszustand mit σ2 = σ
3 = 0 folgt:
– Der Vergleich mit zeigt:
– Daraus folgt für die Fließbedingung:
−I d 2=k
1−2 22−3
23−1
2=6 k
212=6 k
12=Re
2 k=13
Re2
12 [ 1−2
22−3
23−1
2 ]=Re2
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-53
12.09.14
1.4 Fließbedingung
– Mit der Vergleichsspannung
lautet die Fließbedingung:
V , M= 12 [ 1− 2
22− 3
2 3− 1
2 ]=−3 I d 2
= 12 [ x− y
2 y− z
2 z− x
26 xy
2 yz2 xz
2 ]
V , M=Re
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-54
12.09.14
1.4 Fließbedingung
– Die Vergleichsspannung σV, M
nach von Mises stimmt mit der
Vergleichsspannung σV, GH
nach der Gestaltänderungshypo-
these (Maxwell 1856, Huber 1904, Hencky 1924) überein:
– Die Vergleichsspannung nach von Mises ergibt bei duktilen Werkstoffen eine gute Übereinstimmung mit der Beobach-tung.
V , M=V ,GH
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-55
12.09.14
1.4 Fließbedingung
● Fließbehinderung:
– Verantwortlich für das Fließen bei duktilen Werkstoffen ist die Schubspannung.
– Bei einem räumlichen Spannungszustand kann trotz großer Normalspannungen die größtmögliche Schubspannung klein sein, so dass kein Fließen auftreten kann.
– Dieser Fall wird als Fließbehinderung bezeichnet. Bei Fließbehinderung kann auch bei einem duktilen Werkstoff ein Trennbruch auftreten.
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-56
12.09.14
1.4 Fließbedingung
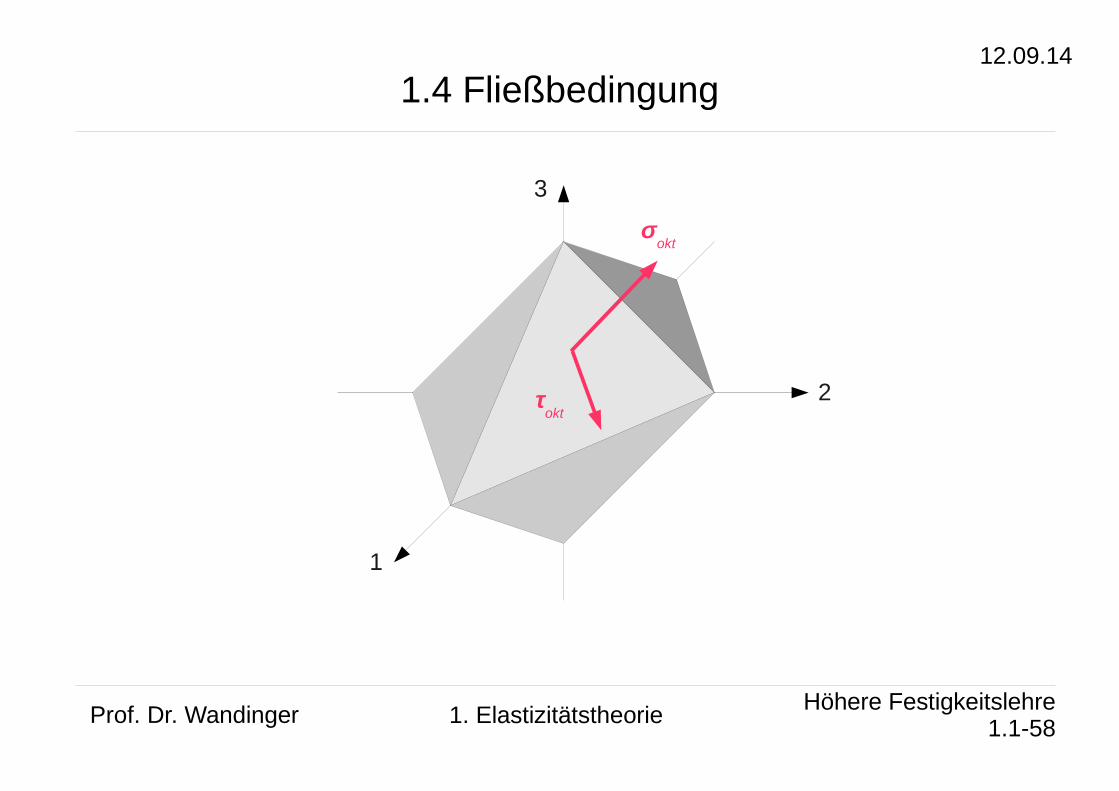
● Oktaederspannungen:
– Die Vergleichsspannung nach von Mises ist eine fiktive Spannung, d.h. es gibt keine Schnittebene, in der diese Spannung als Spannungskomponente auftritt.
– Zur Ermittlung einer Spannungskomponente, an der abge-lesen werden kann, ob Fließen auftritt, werden zunächst Schnittebenen gesucht, deren Normalspannung σ
n mit der
mittleren Normalspannung σm übereinstimmt.
– Im Hauptachsensystem gilt: m=13 1 2 3
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-57
12.09.14
1.4 Fließbedingung
– Aus
folgt: Die mittlere Normalspannung σm tritt als Normalspan-
nung in Ebenen mit dem Normalenvektor
auf.
– Das sind insgesamt acht Ebenen, die den Flächen eines Oktaeders entsprechen.
– Die mittlere Normalspannung wird daher auch als Okta-edernormalspannung σ
okt bezeichnet.
m= n=1 n12 2 n2
2 3 n3
2
[n ]H=1
3[±1 ±1 ±1 ]
T
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-58
12.09.14
1.4 Fließbedingung
1
2
3
σokt
τokt
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-59
12.09.14
1.4 Fließbedingung
– Die Schubspannung in einer Oktaederfläche berechnet sich zu
– Sie wird als Oktaederschubspannung bezeichnet.
– Fließen tritt ein für (Nádai, 1933).
okt=13 1− 2
2 2− 3
2 3−1
2= 2
3 −I d 2
=13 x− y
2 y− z
2 z− x
26 xy
2 yz2 xz
2
= 29 −3 I d 2 =
23
V , M
okt=23
Re
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-60
12.09.14
1.5 Gleichgewichtsbedingungen
● In diesem Kapitel wird der Nachweis der Symmetrie des Spannungstensors nachgeholt.
● Es wird gezeigt, dass die Symmetrie aus dem Momenten-gleichgewicht für einen aus dem Körper herausgeschnit-tenen Quader folgt.
● Das Kräftegleichgewicht für den Quader führt auf ein Sys-tem von partiellen Differenzialgleichungen für die Span-nungskomponenten.
● Da die Symmetrie des Spannungstensors nachgewiesen werden soll, müssen die Gleichungen zunächst ohne Verwendung der Symmetrie formuliert werden.
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-61
12.09.14
1.5 Gleichgewichtsbedingungen
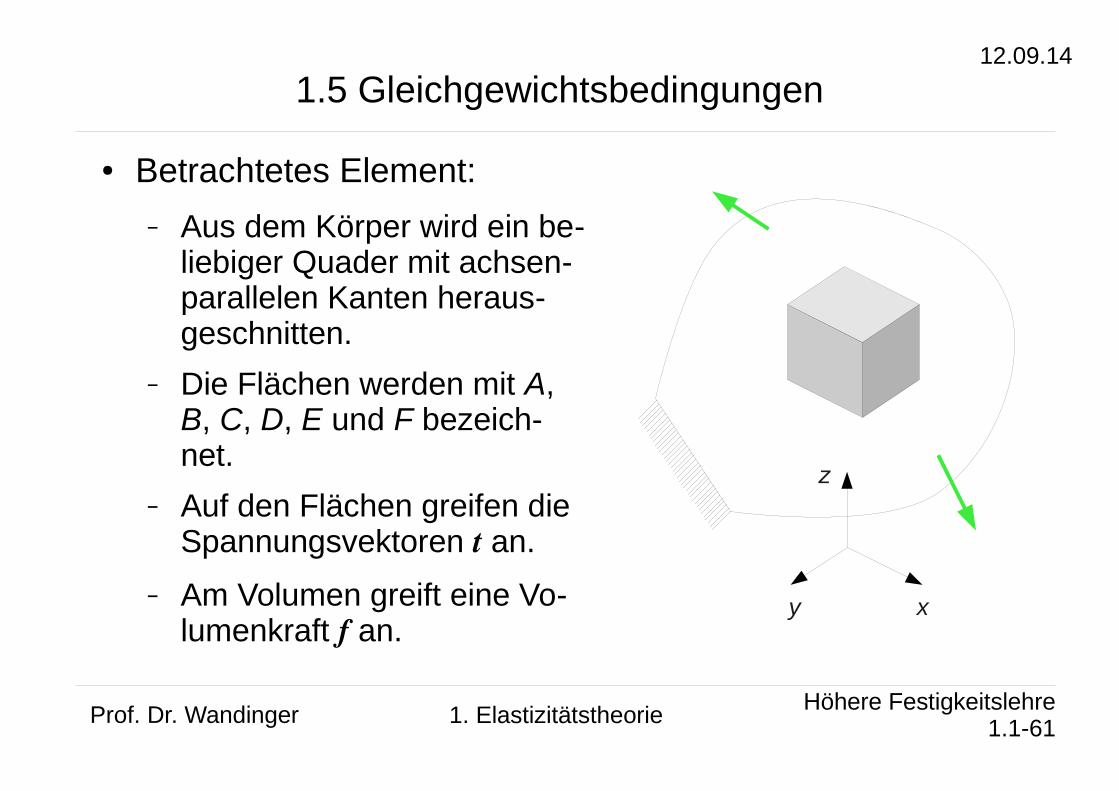
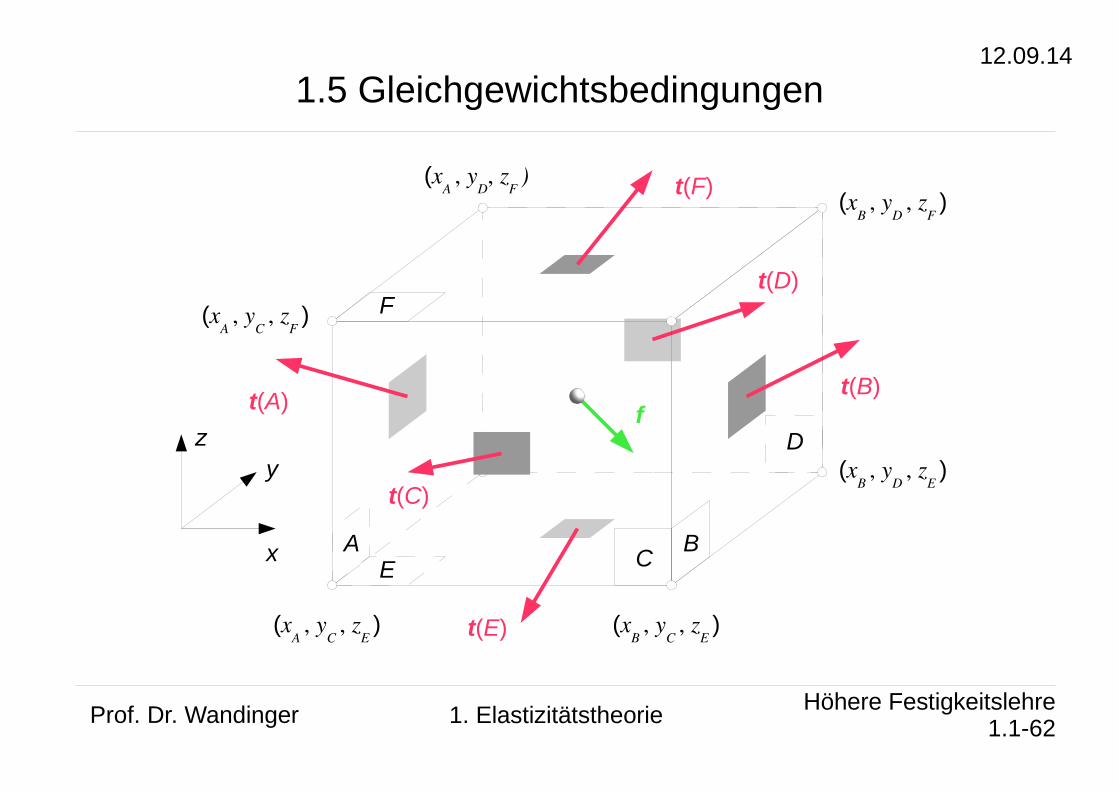
● Betrachtetes Element:
– Aus dem Körper wird ein be-liebiger Quader mit achsen-parallelen Kanten heraus-geschnitten.
– Die Flächen werden mit A, B, C, D, E und F bezeich-net.
– Auf den Flächen greifen die Spannungsvektoren t an.
– Am Volumen greift eine Vo-lumenkraft f an.
xy
z
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-62
12.09.14
1.5 Gleichgewichtsbedingungen
A B
D
CE
F
x
yz
ft(B)
t(F)
t(A)
t(E)
t(D)
t(C)
(xA
, yC
, zE ) (x
B , y
C , z
E )
(xB
, yD
, zE )
(xB
, yD
, zF )
(xA
, yD, z
F )
(xA
, yC
, zF )
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-63
12.09.14
1.5 Gleichgewichtsbedingungen
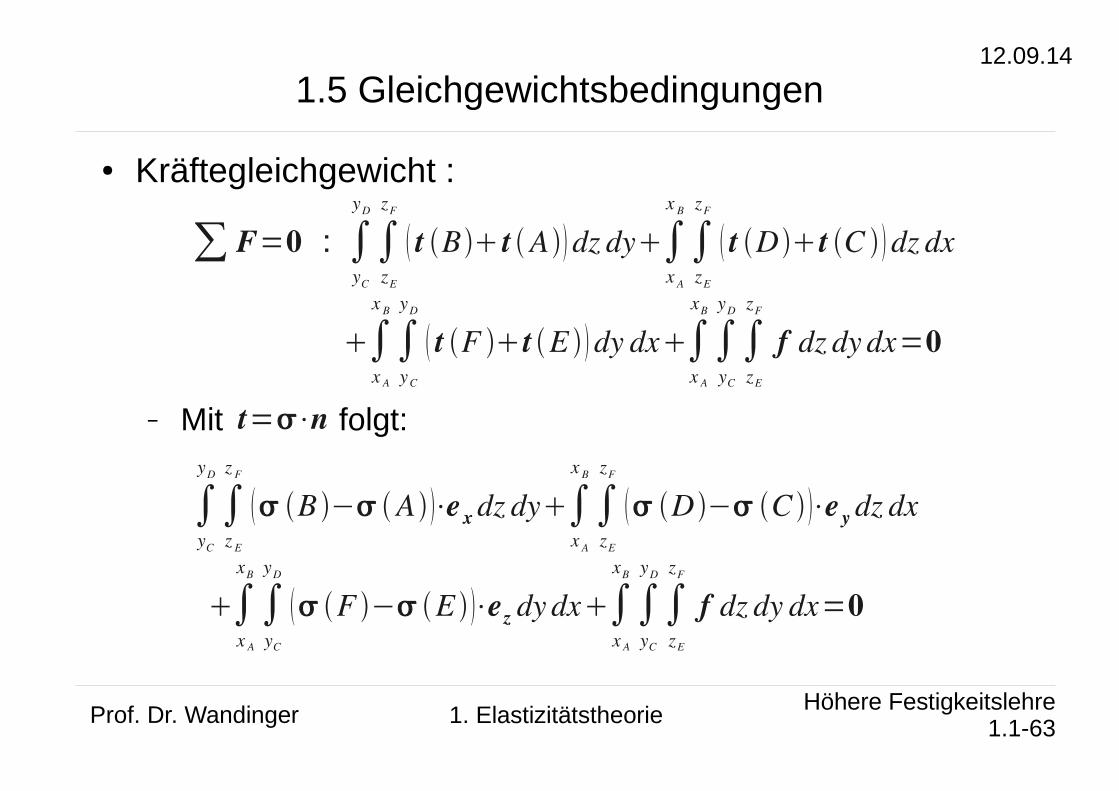
● Kräftegleichgewicht :
– Mit folgt:
∑ F=0 : ∫yC
yD
∫zE
zF
t B t A dz dy∫x A
x B
∫zE
zF
t Dt C dz dx
∫x A
x B
∫yC
yD
t F t E dy dx∫x A
xB
∫yC
yD
∫zE
zF
f dz dy dx=0
t=⋅n
∫yC
yD
∫z E
z F
B − A ⋅exdz dy∫x A
x B
∫zE
zF
D− C ⋅e ydz dx
∫x A
xB
∫yC
yD
F − E ⋅ez dy dx∫x A
xB
∫yC
yD
∫zE
zF
f dz dy dx=0
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-64
12.09.14
1.5 Gleichgewichtsbedingungen
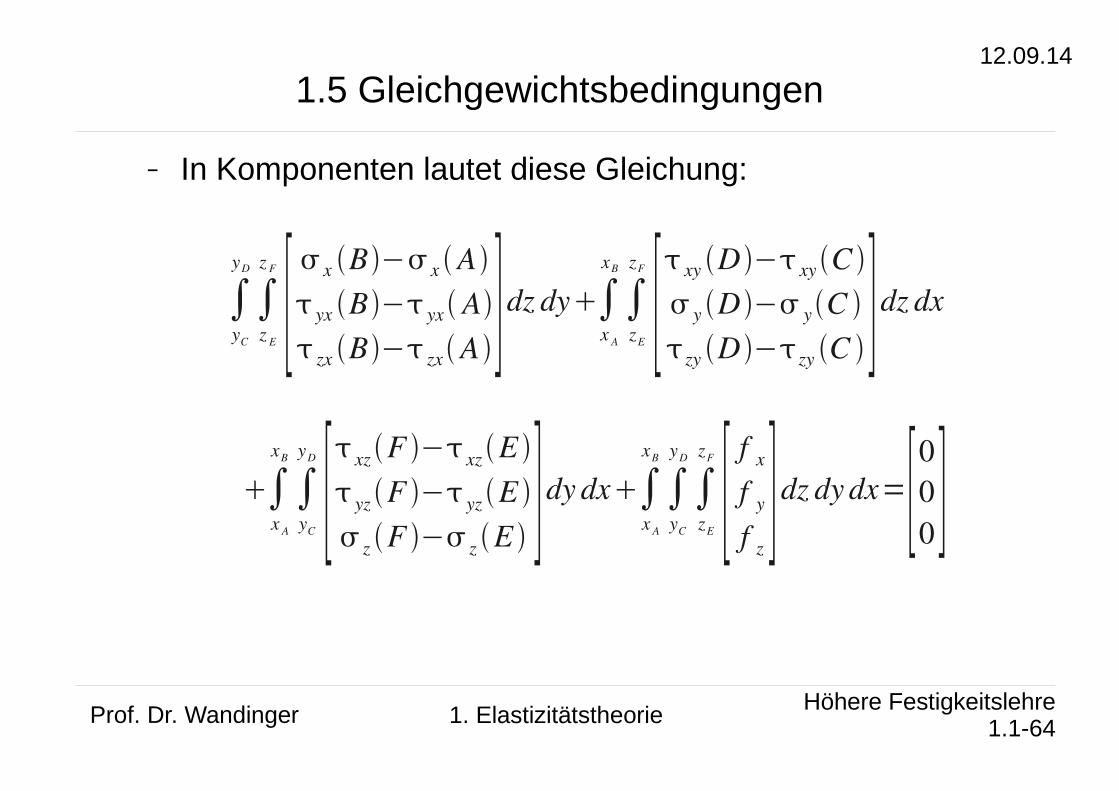
– In Komponenten lautet diese Gleichung:
∫yC
yD
∫z E
z F
[ x B− x A
yx B− yx A
zx B− zx A]dz dy∫x A
xB
∫zE
zF
[ xy D− xyC
y D− yC
zy D−zy C ]dz dx
∫x A
xB
∫yC
yD
[ xzF − xzE
yzF − yzE
z F − z E ]dy dx∫x A
xB
∫yC
yD
∫zE
zF
[f x
f y
f z]dz dy dx=[
000 ]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-65
12.09.14
1.5 Gleichgewichtsbedingungen
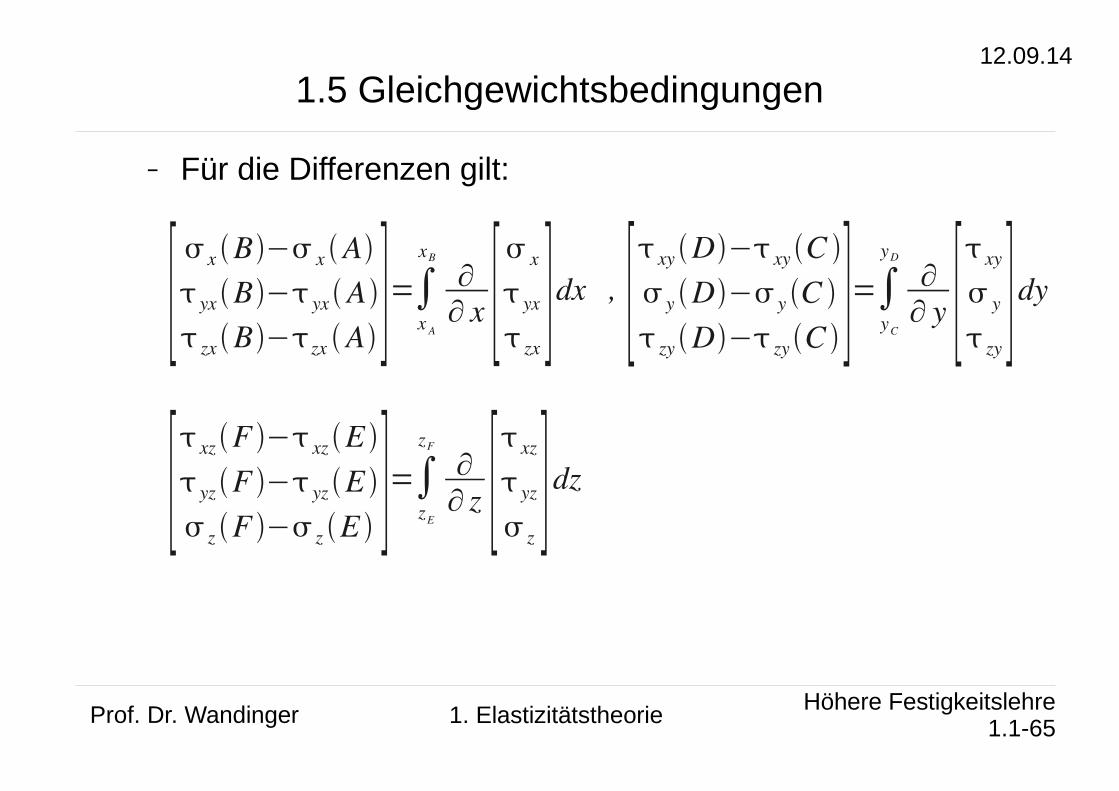
– Für die Differenzen gilt:
[ x B− x A
yx B− yx A
zxB−zx A ]=∫x A
xB
∂∂ x [
x
yx
zx]dx , [
xy D− xy C
y D− y C
zy D− zyC ]=∫yC
yD
∂∂ y [
xy
y
zy]dy
[ xzF − xz E
yzF − yz E
z F − z E ]=∫zE
zF
∂∂ z [
xz
yz
z]dz
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-66
12.09.14
1.5 Gleichgewichtsbedingungen
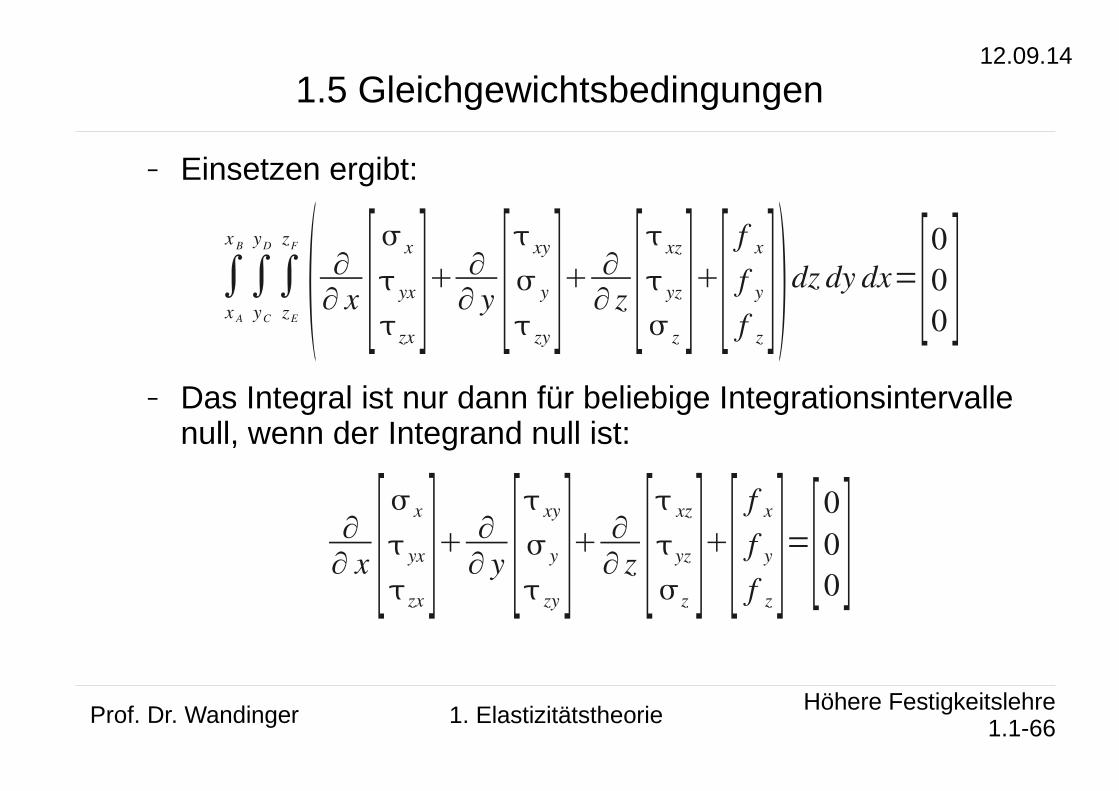
– Einsetzen ergibt:
– Das Integral ist nur dann für beliebige Integrationsintervalle null, wenn der Integrand null ist:
∫x A
x B
∫yC
yD
∫zE
zF ∂∂ x [
x
yx
zx] ∂
∂ y [ xy
y
zy] ∂
∂ z [ xz
yz
z][
f x
f y
f z]dz dy dx=[
000 ]
∂∂ x [
x
yx
zx] ∂
∂ y [ xy
y
zy] ∂
∂ z [ xz
yz
z][
f x
f y
f z]=[
000 ]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-67
12.09.14
1.5 Gleichgewichtsbedingungen
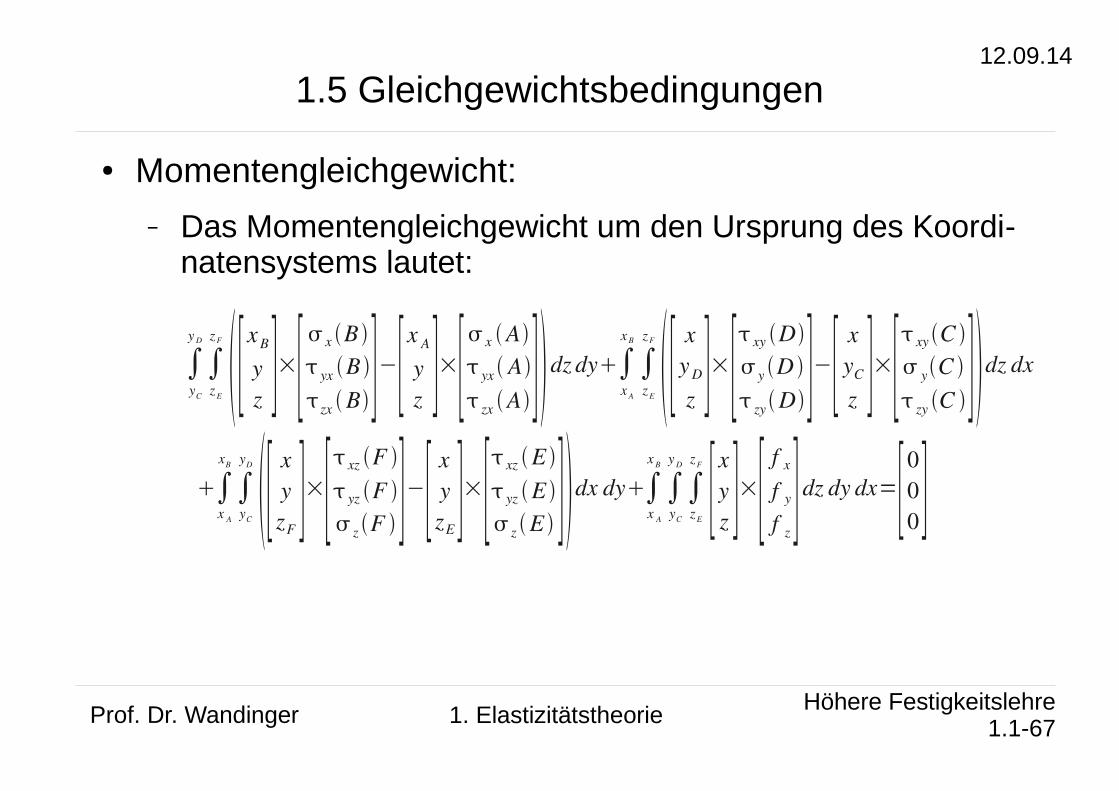
● Momentengleichgewicht:
– Das Momentengleichgewicht um den Ursprung des Koordi-natensystems lautet:
∫yC
y D
∫z E
z F [xB
yz ]×[
x B
yx B
zx B]−[x A
yz ]×[
x A
yx A
zx A]dz dy∫x A
x B
∫zE
zF [x
y D
z ]×[ xy D
y D
zyD]−[xyC
z ]×[ xy C
yC
zy C ]dz dx
∫x A
xB
∫yC
yD [ xyzF
]×[ xz F
yz F
z F ]−[xyzE
]×[ xz E
yz E
z E ]dx dy∫x A
x B
∫yC
y D
∫zE
zF
[xyz ]×[
f x
f y
f z]dz dy dx=[
000]
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-68
12.09.14
1.5 Gleichgewichtsbedingungen
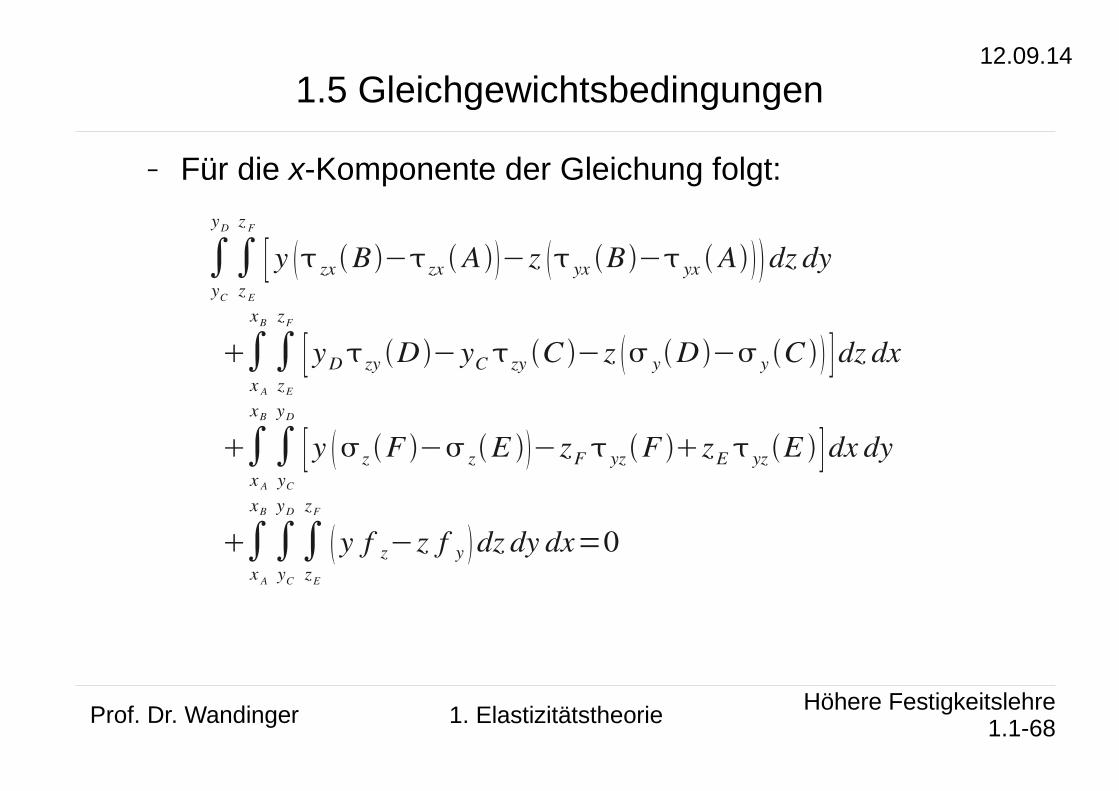
– Für die x-Komponente der Gleichung folgt:
∫yC
yD
∫z E
z F
[ y zx B−zx A−z yx B− yx A dz dy
∫x A
xB
∫zE
zF
[ yDzy D−yC zy C −z yD− y C ] dz dx
∫x A
xB
∫yC
yD
[ y z F − zE −zF yz F zE yz E ] dx dy
∫x A
xB
∫yC
yD
∫zE
zF
y f z−z f y dz dy dx=0
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-69
12.09.14
1.5 Gleichgewichtsbedingungen
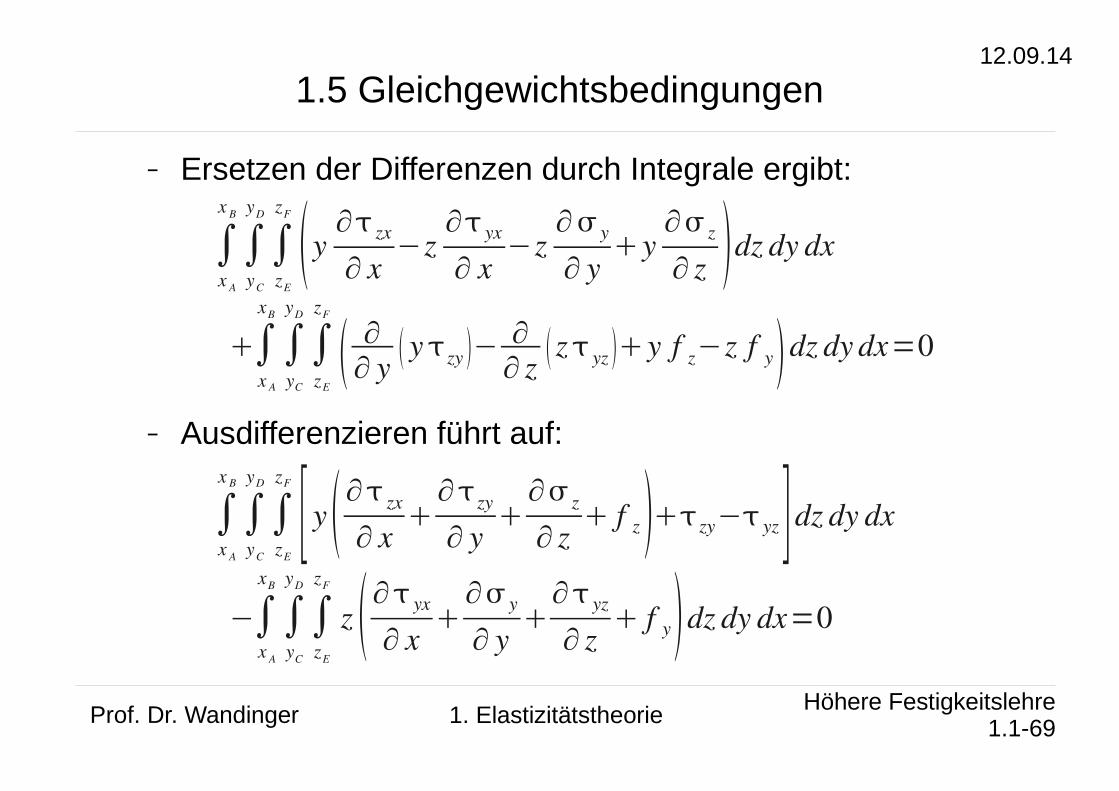
– Ersetzen der Differenzen durch Integrale ergibt:
– Ausdifferenzieren führt auf:
∫x A
x B
∫yC
yD
∫zE
zF
y∂ zx
∂ x−z
∂ yx
∂ x−z
∂ y
∂ yy
∂ z
∂ z dz dy dx
∫x A
xB
∫yC
yD
∫zE
zF
∂∂ y yzy − ∂
∂ z z yz y f z−z f ydz dy dx=0
∫x A
x B
∫yC
yD
∫zE
zF
[ y ∂ zx
∂ x
∂zy
∂ y
∂ z
∂ z f z zy− yz ]dz dy dx
−∫x A
xB
∫yC
yD
∫zE
zF
z ∂ yx
∂ x
∂ y
∂ y
∂ yz
∂ z f ydz dy dx=0
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-70
12.09.14
1.5 Gleichgewichtsbedingungen
– Unter Berücksichtigung der aus dem Kräftegleichgewicht gewonnenen Beziehungen folgt:
– Diese Gleichung ist nur dann für beliebige Integrationsgren-zen erfüllt, wenn gilt:
– Entsprechend folgt aus den beiden übrigen Komponenten des Momentengleichgewichts:
∫x A
x B
∫yC
yD
∫zE
zF
zy− yz dz dy dx=0
zy=yz
zx= xz , yx= xy
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-71
12.09.14
1.5 Gleichgewichtsbedingungen
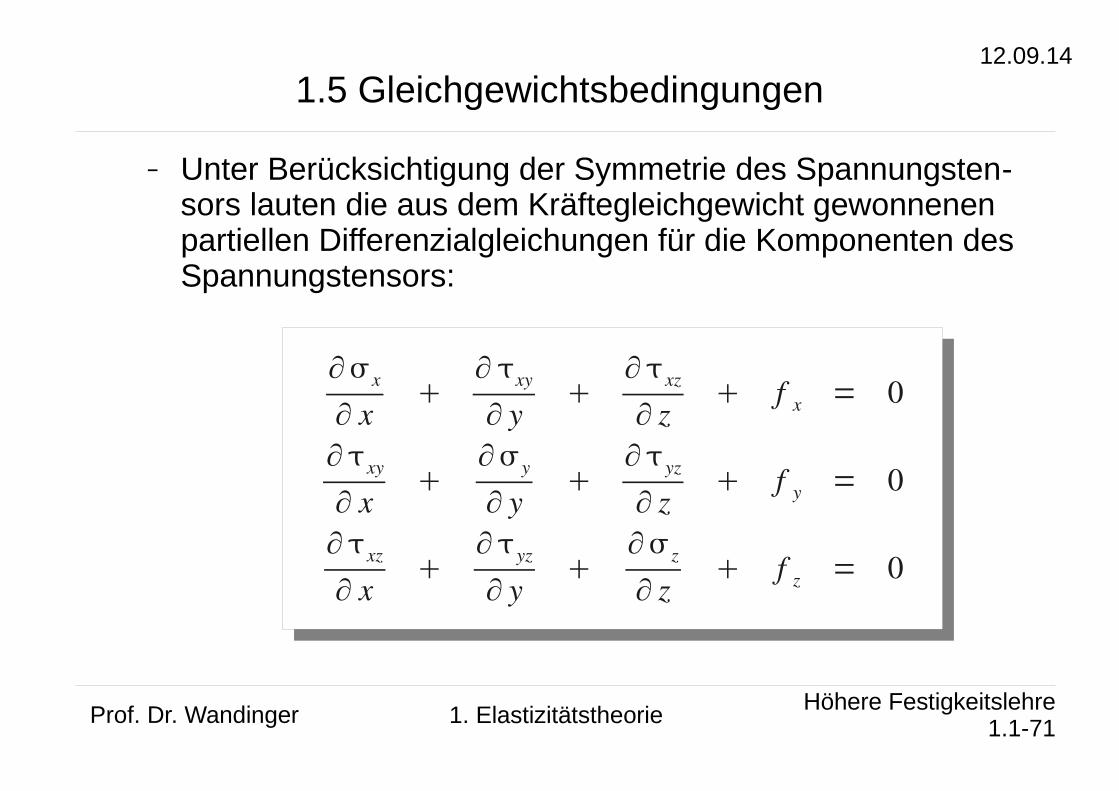
– Unter Berücksichtigung der Symmetrie des Spannungsten-sors lauten die aus dem Kräftegleichgewicht gewonnenen partiellen Differenzialgleichungen für die Komponenten des Spannungstensors:
∂ x
∂ x
∂ xy
∂ y
∂xz
∂ z f x = 0
∂xy
∂ x
∂ y
∂ y
∂yz
∂ z f y = 0
∂xz
∂ x
∂yz
∂ y
∂ z
∂ z f z = 0
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-72
12.09.14
1.5 Gleichgewichtsbedingungen
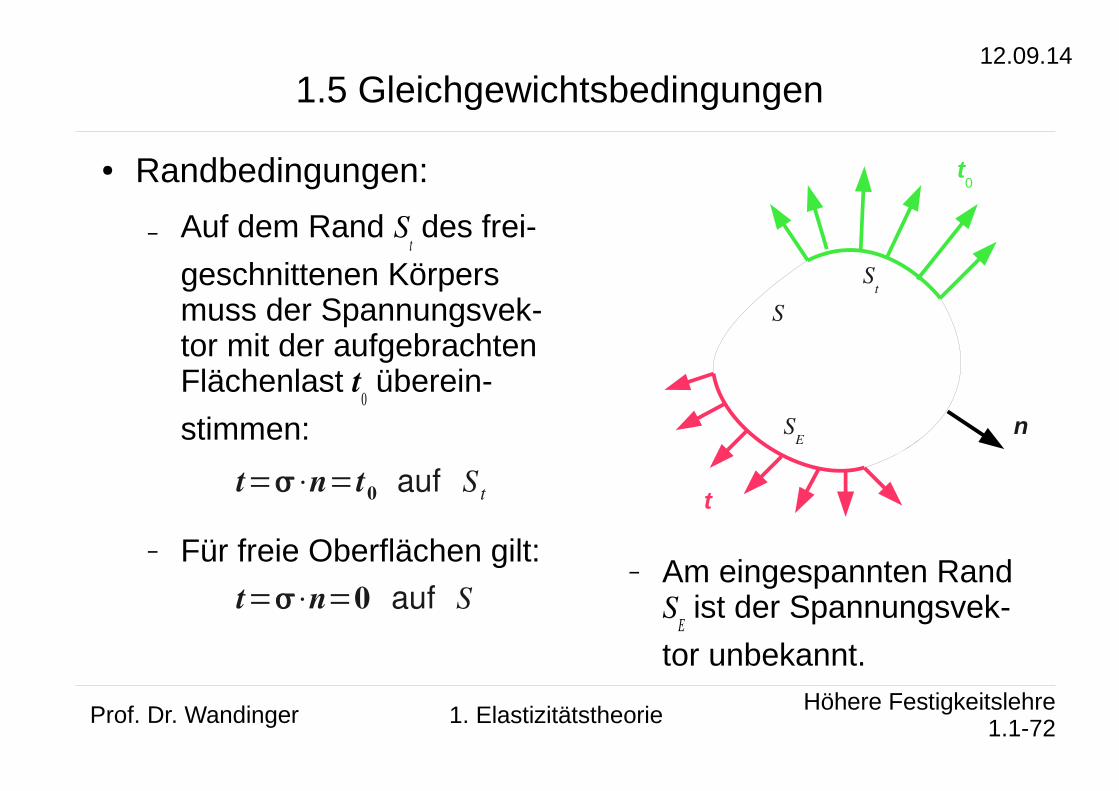
● Randbedingungen:
– Auf dem Rand St des frei-
geschnittenen Körpers muss der Spannungsvek-tor mit der aufgebrachten Flächenlast t
0 überein-
stimmen:
– Für freie Oberflächen gilt:
t0
n
SS
t
SE
tt=⋅n= t0 auf S t
t=⋅n=0 auf S– Am eingespannten Rand
SE ist der Spannungsvek-
tor unbekannt.
Prof. Dr. Wandinger 1. ElastizitätstheorieHöhere Festigkeitslehre
1.1-73
12.09.14
1.5 Gleichgewichtsbedingungen
● Zusammenfassung:
– Aus dem Momentengleichgewicht folgt die Symmetrie des Spannungstensors.
– Aus dem Kräftegleichgewicht folgen drei partielle Differen-zialgleichungen für die sechs Komponenten des Span-nungstensors. Sie allein reichen nicht aus, um das Span-nungsfeld in einem Körper zu berechnen.
– Weitere Gleichungen folgen aus der Kinematik und dem Materialgesetz.
– Damit können auch Verschiebungsrandbedingungen be-rücksichtigt werden.


















